
光ビーコンのビーコンヘッド及びビーコンヘッドの測量方法
【課題】精度よくかつ効率的に測量を行うことができる光ビーコンのビーコンヘッド、及び、ビーコンヘッドの測量方法を提供する。
【解決手段】本発明のビーコンヘッド2は、アップリンク光の受光部8とダウンリンク光の投光部7とを有する筐体2aを備えている。筐体2aの外面には、セオドライトを通した視準が可能なターゲットポイント40が設けられている。
【解決手段】本発明のビーコンヘッド2は、アップリンク光の受光部8とダウンリンク光の投光部7とを有する筐体2aを備えている。筐体2aの外面には、セオドライトを通した視準が可能なターゲットポイント40が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路を走行する車両に搭載された車載機との間で光信号による双方向通信を行うための光ビーコンのビーコンヘッド及びビーコンヘッドの測量方法に関するものである。
【背景技術】
【0002】
路車間通信システムを利用した交通情報サービスとして、光ビーコン、電波ビーコン又はFM多重放送を用いたいわゆるVICS(Vehicle Information and Communication System)が既に展開されている。このうち、光ビーコンは近赤外線を通信媒体とした光通信を採用しており、車載機との双方通信が可能となっている。
具体的には、車両の保持するビーコン間の旅行時間情報等を含むアップリンク情報が車載機からインフラ側の光ビーコンに送信され、逆に、渋滞情報、区間旅行時間情報、事象規制情報及び車線通知情報等を含むダウンリンク情報が光ビーコンから車載機に送信されるようになっている。
【0003】
上記光ビーコンは、車載機との間で双方向通信を行う投受光器を備えており、この投受光器は、発光ダイオード(LED)からなるダウンリンク情報を送出するための投光部と、フォトセンサからなる車載機からのアップリンク情報を受光するための受光部とを備えている。
光ビーコンの投受光器(ビーコンヘッド)は、支柱等に支持されて道路上方に設置されており、その下方を通過する車載機との間で通信を行うための通信領域を、その直下よりも上流側よりに設定する。
【0004】
ビーコンヘッドは、自己よりも下流側に位置する道路上の停止線までの距離等といった、現在位置から所定位置までの距離情報を含んだダウンリンク情報を、前記通信領域内で送信することで、前記通信領域内に位置する車載機に対して前記距離情報を提供する。
前記通信領域内で前記距離情報を取得した車載機は、停止線等、所定位置の手前で停止するように車両を制御させたり、ドライバに停止や減速を促す報知を行うといった、ドライバに対する安全運転支援のための情報として、当該距離情報を利用することがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記ビーコンヘッドは、自装置が設定する通信領域を基準とした距離情報を車載通信機に送信するが、前記通信領域は、当該ビーコンヘッドの投光部及び受光部の位置に基づいて定まる。このため、前記距離情報は、予めビーコンヘッド(の投受光部)の位置を測量し、道路上の各位置との間の相対位置を明らかにした上で求められる。
【0007】
ここで、上記ビーコンヘッドの投光部及び受光部の位置を測量によって求めようとする場合、その筐体の外形を成す角部等、外形的に特徴のある点を複数定めてこれを測点とし、これら各測点の位置を測量した上で、その筐体の外形を推定し、投光部及び受光部の位置を推定するといった方法が考えられる。
しかし、上記方法では、一つのビーコンヘッドの位置を測量するために、複数の測点を測量しなければならない上に、筐体の外形を推定しさらに投光部及び受光部の位置を推定するので、誤差を含みやすく、さらに、測量の工数や、位置を推定するために必要な計算の工数を多く必要とするため、効率的とは言えない。
【0008】
本発明はこのような事情に鑑みてなされたものであり、精度よくかつ効率的に測量を行うことができる光ビーコンのビーコンヘッド、及び、ビーコンヘッドの測量方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)本発明は、車載機との間で路車間通信を行う光ビーコンのビーコンヘッドであって、アップリンク光の受光部とダウンリンク光の投光部とを有する筐体を備え、セオドライトを通した視準が可能なターゲットポイントが前記筐体の外面に設けられていることを特徴としている。
【0010】
上記のように構成されたビーコンヘッドによれば、セオドライトを通した視準が可能なターゲットポイントが筐体の外面に設けられているので、このターゲットポイントを測点とすることで、ビーコンヘッドにおける測点を明確にでき、精度よくビーコンヘッドの位置を測量することができる。
【0011】
(2)さらに、前記ターゲットポイントは、前記筐体の外面における前記投光部と前記受光部との間の位置に設けられていることが好ましく、この場合、ターゲットポイントの位置を、投光部及び受光部それぞれの位置とみなして測量することができる。つまり、ターゲットポイントの位置を測量すれば、投光部及び受光部の位置を把握することができ、上記従来例にて示した方法のように多数の測点を測量する場合と比較して、効率的に測量を行うことができる。また、多数の測点を測量することなくターゲットポイントの位置のみを測量し、受光部及び投光部の位置を求めるので、精度を低下させる要因を極力排除でき、精度よく測量することができる。
【0012】
(3)筐体の外面に目立つ模様等を付すことは、美感等の上で好ましくない。この点、前記ターゲットポイントは、ビーコンヘッドを設置し、その位置を測量した後は、不要となるため、前記筐体の表面に剥離自在に貼り付けられたシート部材によって構成してもよい。
この場合、ターゲットポイントを用いて測量を終えた後、ターゲットポイントを構成するシート部材を剥離することができ、美感の維持を図ることができる。
【0013】
(4)また、上記理由により、前記ターゲットポイントは、時間経過に伴って目立たなくなる劣化し易い塗料により前記筐体の外面に描かれた図柄よりなるものであってもよい。
この場合、ターゲットポイントを用いて測量を終えた後、放置しておけば、期間の経過によってターゲットポイントは目立たなくなるので、特にターゲットポイントを除去する作業等を要しない。
【0014】
(5)また、本発明は、コンパス機能とノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、上記光ビーコンのビーコンヘッドの測量方法であって、基準点に据え付けた前記トータルステーションから前記ターゲットポイントを視準するステップと、前記トータルステーションによって演算された前記ターゲットポイントの前記基準点に対する位置を取得するステップと、を含むことを特徴としている。
【0015】
上記のように構成された測量方法によれば、トータルステーションによってターゲットポイントを視準すれば、当該トータルステーションによって自動演算される基準点に対する位置を取得することができるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0016】
(6)また、本発明は、ノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、上記光ビーコンのビーコンヘッドの測量方法であって、第1基準点に据え付けた前記トータルステーションにより、第2基準点と前記ターゲットポイントとの間の水平角度を測定するステップと、測定した前記水平角度を入力情報として前記トータルステーションによって演算された前記ターゲットポイントの前記第1基準点に対する位置を取得するステップと、を含むことを特徴としている。
【0017】
上記のように構成された測量方法によれば、トータルステーションによって第2基準点とターゲットポイントとを視準し両者間の水平角度を測定すれば、当該トータルステーションによって演算される第1基準点に対する位置を取得することができるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0018】
また、本発明は、視準対象間の水平角度を測定可能なセオドライトを用いて行う上記光ビーコンのビーコンヘッドの測量方法であって、第1基準点に据え付けた前記セオドライトにより、第2基準点と前記ターゲットポイントとの間の第1水平角度を測定するステップと、前記第2基準点に据え付けた前記セオドライトにより、前記第1基準点と前記ターゲットポイントとの間の第2水平角度を測定するステップと、測定した前記第1及び第2水平角度を用いて前記ターゲットポイントの前記第1又は第2基準点に対する位置を演算するステップと、を含むことを特徴としている。
【0019】
上記のように構成された測量方法によれば、第1水平角度及び第2水平角度を測定し、得られた両水平角度を用いて位置を演算することで、精度よくビーコンヘッドの位置を測量することができる。
【発明の効果】
【0020】
本発明の光ビーコンのビーコンヘッド、及び、ビーコンヘッドの測量方法によれば、精度よくかつ効率的に測量を行うことができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係るビーコンヘッドを備えた光ビーコンが設置された道路の平面図である。
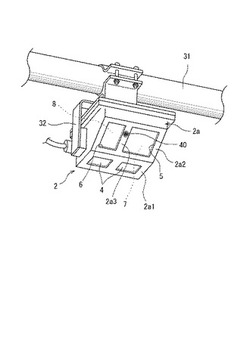
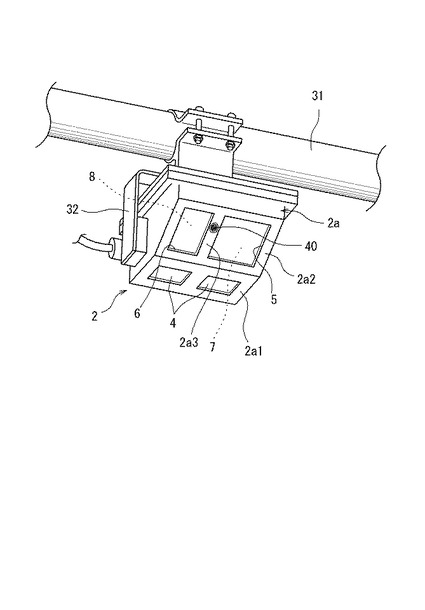
【図2】ビーコンヘッドを道路上から見たときの外観を示す斜視図である。
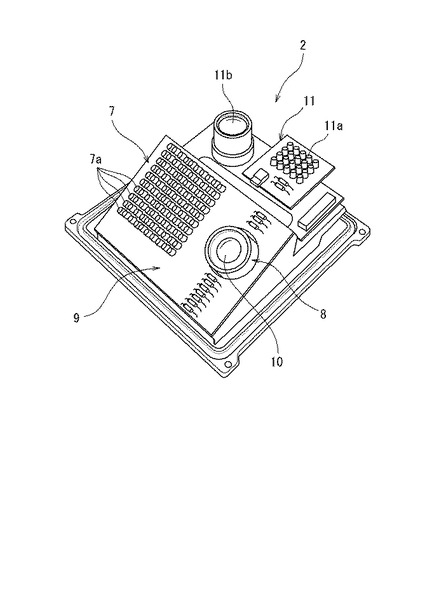
【図3】ビーコンヘッドの内部を示す斜視図である。
【図4】本実施形態の光ビーコンが、道路上に設定する通信領域を示す側面図である。
【図5】ビーコンヘッドの筐体の前面部の一部拡大図である。
【図6】ターゲットポイントの位置を測量する際の態様を示した道路の平面図である。
【図7】ターゲットポイントの位置を測量する際の他の態様を示した道路の平面図である。
【図8】他の実施形態に係るビーコンヘッドの斜視図である。
【図9】(a)は、ターゲットポイントを構成する図柄の他の態様を示す図であり、(b)は、(a)と異なる他の態様を示す図である。
【発明を実施するための形態】
【0022】
次に、本発明の好ましい実施形態について添付図面を参照しながら説明する。
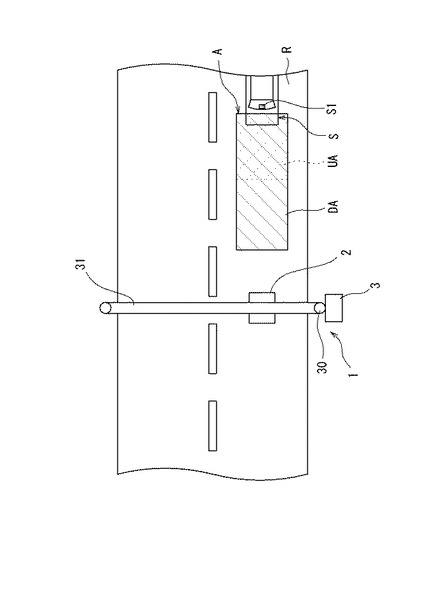
図1は、本発明の一実施形態に係るビーコンヘッドを備えた光ビーコンが設置された道路の平面図である。
本実施形態の光ビーコン1は、道路Rを走行する車両Sに搭載された車載機S1との間で光信号による双方向通信を行うものであり、図に示すように、道路Rの上方に配置され車両Sに搭載された車載機S1と通信を行うためのビーコンヘッド2と、このビーコンヘッド2を制御するためのビーコン制御機3とを備えている。
【0023】
ビーコン制御機3は、道路脇に立設された支柱30等に設置されており、電話回線等の通信回線を介して交通管制システム等の図示しない中央装置と接続されており、ビーコンヘッド2の制御を行う。
ビーコンヘッド2は、支柱30から道路R側に水平に架設された架設バー31に固定され、道路Rの車線の直上に配置されており、車載機S1との間で通信可能な領域である通信領域Aを、道路R上に設定する。
【0024】
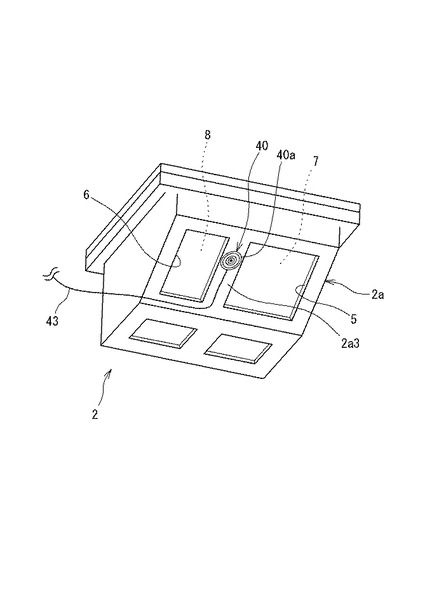
図2は、ビーコンヘッド2を道路R上から見たときの外観を示す斜視図である。ビーコンヘッド2は、内部機構を収納する筐体2aの両側面に固定されたブラケット32を介して架設バー31に固定されている。
筐体2aは、下側に向く下面部2a1と、下面部2a1と繋がるように形成され当該ビーコンヘッド2が設置されている道路R上の直下の位置よりも車両進行方向上流側斜め下方に向く前面部2a2とを有している。
下面部2a1には、一対の下側窓部4が形成されており、筐体2aの内部に配置された後述する車両検知部が当該ビーコンヘッド2直下を通過する車両Sを検知するための光信号を一対の窓部4を通じて送受信可能とされている。
また、前面部2a2には、第一窓部5と、この第一窓部5よりも幅の狭い第二窓部6が縦桟部2a3を挟んで形成されており、筐体2aの内部に配置された後述する投光部及び受光部が、これら両窓部5,6を通じて、道路R上を走行する車載機S1との間の通信に係る光信号を送受信可能とされている。
【0025】
図3は、ビーコンヘッド2の内部を示す斜視図である。なお、図3では、図2中のビーコンヘッド2の下面部2a1を上側にして設置した上で筐体2aを外したときの当該ビーコンヘッド2内部の外観を斜視図として示している。ビーコンヘッド2は、筐体2aの内部に、多数の発光ダイオード(LED)7aを配列してなる投光部7と、車載機S1から送信される近赤外線からなる光信号によるアップリンク情報を受信する受光部8とが実装された基板9を備えている。
【0026】
基板9は、投光部7が第一窓部5(図2)に、受光部8が第二窓部6(図2)に対応するように、筐体2aの前面部2a2の内側面に対向配置されている。従って、投光部7は、第一窓部5から筐体2aの外部を望むように前面部2a2に配置され、受光部8は、第二窓部6から筐体2aの外部を望むように前面部2a2に配置されている。
投光部7は、LED7aによって、道路R上の車載機S1に対して、近赤外線からなる光信号(ダウンリンク光)によるダウンリンク情報を、第一窓部5を通じて道路R上の所定の範囲に向けて送信する。
投光部7に隣接して基板9に実装されている受光部8は、送信される光信号を集光する集光レンズ10と、基板9上に固定され集光レンズ10を介して光信号を受信するための図示しない受光素子とを備えており、道路R上の車載機S1が送信する光信号(アップリンク光)であるアップリンク情報を、第二窓部6を通じて受信する。
【0027】
上記投光部7及び受光部8が実装された基板9は、上述のように、筐体2aの前面部2a2に対向配置されており、水平方向に対して(例えば、水平方向に対して30度の角度で)傾斜させて固定されている。これによって、投光部7は、当該ビーコンヘッド2の直下よりも車両進行方向上流側に向けてダウンリンク情報を送信する。また、受光部8は、当該ビーコンヘッド2の直下よりも上流側に位置する車載機S1からのアップリンク情報を受信する。
【0028】
また、ビーコンヘッド2は、上記投光部7、受光部8の他、ビーコンヘッド2の直下における車両Sの有無を検知するための車両検知部11を備えている。車両検知部11は、筐体2aの下面部2a1の内側に配置されており、一対の窓部4の内の一方を通じてビーコンヘッド2の直下に向けて発光する投光部11aと、道路R側からの反射光を他方の窓部4を通じて受光する受光部11bとを備えている。
車両検知部11は、投光部11aにより発光した光が道路R側で反射したときの反射光を受光部11bで受光するように構成されている。車両検知部11は、この反射光が車両Sに反射して返ってきた光であるか否かを判定することによって、車両の存在を検知するように構成されている。
【0029】
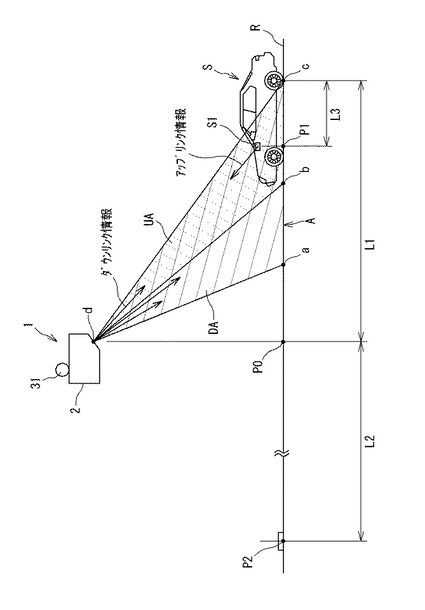
図4は、本実施形態の光ビーコン1が、道路R上に設定する通信領域Aを示す側面図である。光ビーコン1のビーコンヘッド2は、投光部7及び受光部8によって、道路R上の車載機S1との間で通信可能な領域である通信領域Aを、当該ビーコンヘッド2の直下よりも車両進行方向の上流側寄りに設定する。
この通信領域Aは、投光部7から光信号として送出されるダウンリンク情報によって定まるダウンリンク領域DA(図中実線のハッチング部分)と、受光部8が車載機S1から光信号として送信されるアップリンク情報を受信可能な範囲として設定されるアップリンク領域UA(図中破線のハッチング部分)とによって構成されている。
【0030】
光ビーコン(光学式車両感知器)の「近赤外線式インタフェース規格」によれば、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分と重複しており、ダウンリンク領域DAとアップリンク領域UAの上流端は互いに一致するものと規定されている。
上記規格に従って、本実施形態のダウンリンク領域DAは、ビーコンヘッド2(投光部7及び受光部8)の投受光位置d、道路R上の位置a、及び位置cを頂点とする△dacで示された範囲に設定されている。また、アップリンク領域UAは、位置a及び位置cの間に位置する位置b、投受光位置d、及び位置cを頂点とする△dbcで示された範囲に設定されている。ダウンリンク領域DAとアップリンク領域UAの上流端は、位置cで互いに一致し、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分と重複している。また、ダウンリンク領域DAの車両進行方向長さは、通信領域A全体の車両進行方向長さと一致している。
【0031】
本実施形態の光ビーコン1は、通信領域Aを通過する車載機S1と双方向通信を行うことで、車載機S1(車両S)の道路R上の位置を示す位置情報を当該車載機S1に送信する機能を有している。
具体的には、光ビーコン1は、アップリンク領域UA内で車載機S1がアップリンク情報を送信した送信位置を特定する機能を有しており、この特定した車載機S1の送信位置に基づいて、車載機S1の位置情報を得る。
光ビーコン1は、図4中、道路R上のビーコンヘッド2の投受光位置dを通過する垂線が道路Rと交わる位置である位置P0から、位置cまでの距離L1、及び、位置P0から、車両進行方向下流側に位置する停止線P2までの距離L2を予め記憶しており、車載機S1の前記送信位置を特定することによって、例えば、位置cから、現状の車載機S1の位置P1までの距離L3を、車載機S1の位置情報として求める。
光ビーコン1は、上記のようにして求めた、車載機S1の位置情報(距離L3)を、距離L1,L2を示す距離情報とともにダウンリンク情報に格納して当該車載機S1に送信する。
【0032】
車載機S1は、光ビーコン1から得た前記位置情報及び距離情報を利用して、ドライバに対する安全運転支援を行う。
例えば、車載機S1は、光ビーコン1からの前記位置情報及び距離情報に基づいて、車載機S1の位置P1から停止線P2までの距離を求める。そして、車載機S1は、前記位置情報及び距離情報の他、信号現示情報、車両Sの速度情報等に基づいて、停止線P2における車両Sの状況を予測し、必要に応じて、ドライバに注意喚起したり、停止線P2の手前で車両Sを減速させたり、自動停止させたりといった安全支援制御を行う。
【0033】
光ビーコン1は、道路R上に設置される際、位置P0からアップリンク領域UAの上流端である位置cまでの距離L1については、位置P0に対して、予め定められた所定の距離(例えば、5m)だけ上流側に離れた位置に位置するように設置される。
従って、車載機S1の位置情報(距離L3)から停止線P2までの距離を精度よく求めるには、位置P0を精度よく把握する必要がある。
ここで、位置P0は、ダウンリンク情報の送信及びアップリンク情報の受信を行う投受光部7,8の位置である投受光位置dによって定まるため、車載機S1に精度の高い位置情報を提供するためには、この投受光位置dを精度よく把握する必要がある。
このため、本実施形態において、投受光位置dに相当する投受光部7,8の位置は、ビーコンヘッド2を道路R上方に設置した後、その位置を測量することで把握される。
【0034】
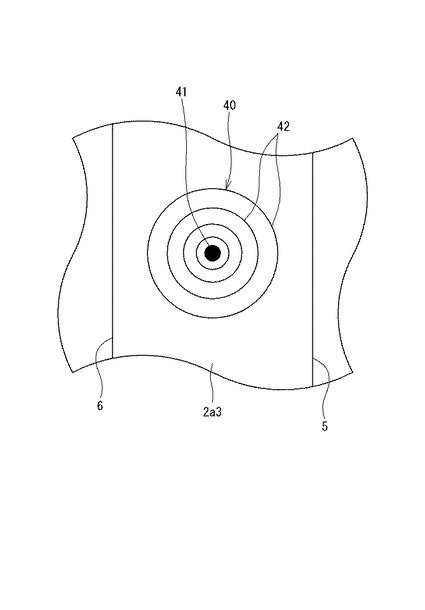
図5は、ビーコンヘッド2の筐体2aの前面部2a2の一部拡大図である。図5及び図2を参照して、本実施形態のビーコンヘッド2の前面部2a2の縦桟部2a3には、投受光部7,8の位置を測量するためのターゲットポイント40が設けられている。
このターゲットポイント40は、セオドライトを通した視準が可能となるように筐体2aに設けられており、その外径は、例えば5mm程度に設定されている。
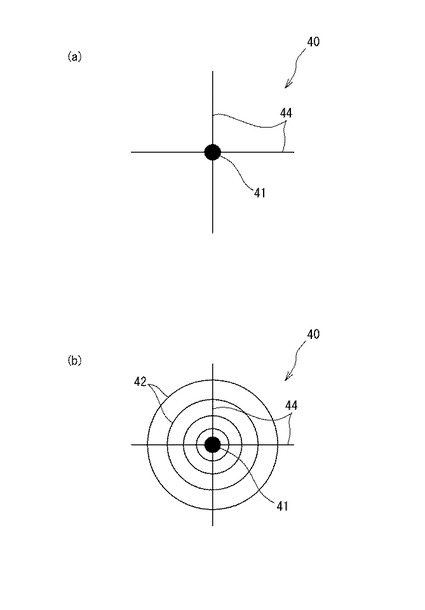
また、ターゲットポイント40は、例えば、時間経過に伴って目立たなくなる劣化し易い、耐水性、耐候性に劣る塗料を用いて、筐体2aの縦桟部2a3に描き、又は印刷することで設けられており、中心に設けられた中心点41と、中心点41の周囲に配置された複数の同心円42とからなる図柄によって構成されている。
ターゲットポイント40を描くために用いられる塗料としては、例えば、酢酸ビニルエマルジョン塗料を用いることができる。また、ターゲットポイント40の色は、筐体2aの塗装色にもよるが、黄色で描くことでセオドライト等を通じて視準する上で好適なものにすることができる。
【0035】
ターゲットポイント40は、縦桟部2a3の幅方向に対しては、ほぼ中央に設けられており、縦桟部2a3の長手方向に対しては、第一窓部5及び第二窓部6の内側に配置されている投光部7及び受光部8の位置とほぼ一致する位置に設けられている。このようにして、ターゲットポイント40は、互いに隣接配置された投光部7と受光部8との間に位置する縦桟部2a3に設けられているので、投光部7及び受光部8それぞれの近傍に配置される。このため、ターゲットポイント40は、道路R上からみて、投光部7及び受光部8の位置とほぼ一致する位置とみなすことができる。
従って、この筐体2a上におけるターゲットポイント40の位置を測量することで、投光部7及び受光部8の位置を精度よく把握することができる。
【0036】
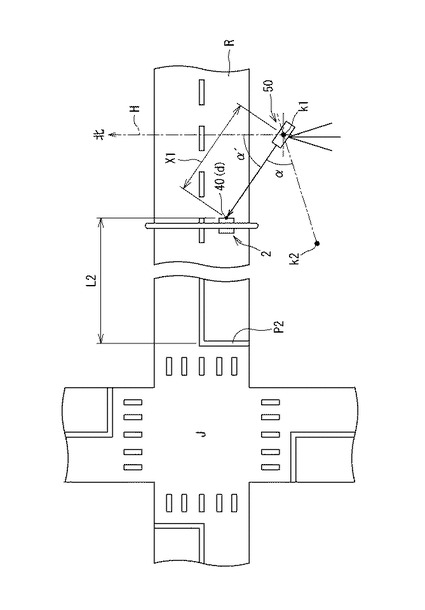
次に、上記ターゲットポイント40を用いたビーコンヘッドの測量方法について説明する。図6は、上記ターゲットポイント40の位置を測量する際の態様を示した道路の平面図である。
ビーコンヘッドの位置を測量するには、まず、図に示すように、道路R脇の歩道等に位置する第1基準点k1にトータルステーション50を据え付け、道路R脇の歩道等に位置する第2基準点k2と、ターゲットポイント40とを視準し、第2基準点k2とターゲットポイント40との間の水平角度αを測定すると同時に、第1基準点からターゲットポイント40までの水平距離X1を測定する。
【0037】
上記トータルステーション50は、2点間の角度を測定するためのセオドライト(経緯儀)に、測距機能と、計測結果を演算するためのコンピュータとを備えたものであり、据え付けられた所定位置から測定対象物に対する水平方向と垂直方向の回転角度、及び、対象物までの距離を取得し、前記コンピュータによって位置を自動演算することができる。
また、本実施形態では、測量対象地点にプリズム等の反射板の設置が不要なノンプリズム方式の測距機能を有するものを用いている。これにより、測量対象地点に反射板を設置することなく、ターゲットポイント40を視準できる歩道上から当該ターゲットポイント40の位置をトータルステーション50によって測距測角することができ、投光部7及び受光部8の位置を求めることができる。このため、道路Rの通行規制等を行う必要がない。
【0038】
水平角度α及び水平距離X1を測定すると、トータルステーション50は、測定した水平角度α及び水平距離X1を取得し、これらに基づいてターゲットポイント40の位置及び高さを演算、出力する。このようにして、ターゲットポイント40の位置を取得することができる。
【0039】
なお、道路R上の交差点Jや、停止線P2、道路R自身の形状等についても、予め測量を行いその位置が把握される。従って、ターゲットポイント40(投受光位置d)の位置を上記のように求めれば、当該ターゲットポイント40の道路R上の位置を把握することができる。
【0040】
また、コンパス機能を備えたトータルステーションを用いた場合、当該トータルステーションは、第2基準点k2を用いずとも、自己が据え付けられた第1基準点k1に対する位置を取得することができる。
すなわち、コンパス機能を備えたトータルステーションは、自己の有するコンパス機能によって方位を把握することができる。例えば、図6中、紙面上側の方向が北である場合、トータルステーション50は、第1基準点k1を通過する北向きの基準線Hを把握することができるので、この基準線Hと、ターゲットポイント40との間の水平角度α´を求めることができる。
従って、トータルステーション50は、この水平角度α´と、水平距離X1とによって、第1基準点k1に対する位置を演算することができる。
つまりこの場合、トータルステーション50によってターゲットポイント40を視準すれば、当該トータルステーション50によって自動演算される第1基準点k1に対する位置を取得することができる。
【0041】
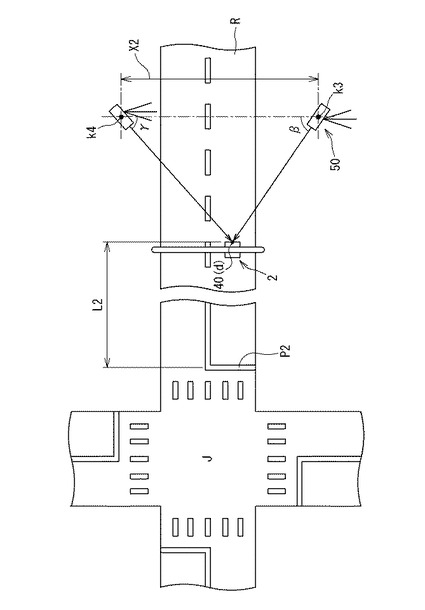
図7は、上記ターゲットポイント40の位置を測量する際の他の態様を示した道路の平面図である。
図7に示した測量方法は、道路Rを挟んで当該道路R脇に位置する二つの基準点である既知の第3基準点k3、及び既知の第4基準点k4に、セオドライト据え付けて測量を行う点において、図6の測量方法と相違している。
本方法では、まず、第3基準点k3にセオドライト51を据え付け、第4基準点k4と、ターゲットポイント40との間の第1水平角度βを測定する。
次いで、第4基準点k4にセオドライト51を据え付け、第3基準点k3と、ターゲットポイント40との間に第2水平角度γを測定する。
そして、測定した第1水平角度β及び第2水平角度γと、第3基準点k3と第4基準点k4との間の水平距離X2と、を用いて、ターゲットポイント40の位置を演算により求める。
【0042】
図6に示した方法と、図7に示した方法のいずれを用いても、ターゲットポイント40の位置を測量することでビーコンヘッド2の位置を把握することができるが、図6に示した方法では、第1基準点k1にトータルステーション50を設置し、ターゲットポイント40等を視準し水平角度を測定すれば、トータルステーション50によって第1基準点k1に対する位置が自動演算され、これを取得できるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0043】
さらに、上述したようにコンパス機能を有するトータルステーションを用いれば、一つの基準点(第1基準点k1)のみで、第1基準点k1に対する位置を取得することができるので、より容易にビーコンヘッド2の位置を測量することができる。
【0044】
上記のように構成されたビーコンヘッド2によれば、セオドライトを通した視準が可能なターゲットポイント40が筐体2aの外面に設けられているので、このターゲットポイント40を測点とすることで、ビーコンヘッド2における測点を明確にでき、精度よくビーコンヘッド2の位置を測量することができる。
【0045】
また、本実施形態では、互いに隣接配置された投光部7と受光部8との間の位置である縦桟部2a3に設けられているので、このターゲットポイント40の位置を、投光部7及び受光部8それぞれの位置とみなして測量することができる。つまり、ターゲットポイント40の位置を測量すれば、投光部7及び受光部8の位置を測量することができ、上記従来例にて示した方法のように多数の測点を測量する場合と比較して、効率的に測量を行うことができる。また、多数の測点を測量することなくターゲットポイント40の位置のみを測量し、投光部7及び受光部8の位置を求めるので、精度を低下させる要因を極力排除でき、精度よく測量することができる。
【0046】
また、筐体2aの外面に目立つ模様等を付すことは、美感等の上で好ましくない。この点、上記ターゲットポイント40は、ビーコンヘッド2を設置し、その位置を測量した後は、不要となるため、本実施形態のターゲットポイント40は、耐水性、耐候性に劣る塗料といったように、時間経過に伴って目立たなくなる劣化し易い塗料により筐体2aの外面に描かれた図柄とされている。これによって、ターゲットポイント40を用いて測量を終えた後、放置しておけば、特に除去する作業等を行わなくても、期間の経過によって当該ターゲットポイント40は目立たなくすることができる。
【0047】
図8は、他の実施形態に係るビーコンヘッド2の斜視図である。図8に示すビーコンヘッド2において、ターゲットポイント40は、シール等のシート部材40aの表面にターゲットポイント40を構成するための図柄を印刷することによって構成されており、シート部材40aを縦桟部2a3に貼り付けることで、筐体2aに設けられている。
【0048】
本実施形態のターゲットポイント40は、さらに、一端がシート部材40aに固着された紐状部材43を備えている。この紐状部材43は、シート部材40aから、架設バー31(図1)及び支柱30(図1)をつたわせて配置されており、その他端が下方にまで延ばされている。ターゲットポイント40を構成するシート部材40aは、この紐状部材43の他端を歩道上の作業者等が引っ張ることで、ビーコンヘッド2の筐体2aから剥離させることができる。
このように、本実施形態では、ターゲットポイント40が剥離自在に貼り付けられたシート部材40aによって構成されているので、ターゲットポイント40を用いて測量を終え、当該ターゲットポイント40が不要になれば、シート部材40aを剥離してターゲットポイント40自体を無くすことができる。これによって、筐体2aの外面における美感の維持を図ることができる。
【0049】
なお、本発明は、上記実施形態に限定されることはない。例えば、図8において、シート部材40aと、シート部材40aを剥離するための紐状部材43とを備えたターゲットポイント40を示したが、シート部材40aを貼り付けるために用いる接着剤として、屋外に暴露したときに数日〜数週間で剥離する程度の弱い接着力の接着剤を用いれば、紐状部材43を設けずとも、数日〜数週間といった所定の期間が経過することで、シート部材40aを筐体2aから剥離させることができる。
【0050】
また、上記実施形態では、ターゲットポイント40は、中心点41と、複数の同心円42とからなる図柄によって構成した場合を例示したが、例えば、図9(a)に示すように、中心点41と、この中心点41で直交する2つの直線44とによって構成してもよいし、図9(b)に示すように、中心点41と、複数の同心円42と、中心点41で直交する2つの直線44とによって構成してもよい。
【0051】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0052】
2 ビーコンヘッド
2a 筐体
7 投光部
8 受光部
40 ターゲットポイント
40a シート部材
50 トータルステーション
51 セオドライト
k1 第1基準点
k2 第2基準点
k3 第3基準点(第1基準点)
k4 第4基準点(第2基準点)
α 水平角度
β 第1水平角度
γ 第2水平角度
S1 車載機
【技術分野】
【0001】
本発明は、道路を走行する車両に搭載された車載機との間で光信号による双方向通信を行うための光ビーコンのビーコンヘッド及びビーコンヘッドの測量方法に関するものである。
【背景技術】
【0002】
路車間通信システムを利用した交通情報サービスとして、光ビーコン、電波ビーコン又はFM多重放送を用いたいわゆるVICS(Vehicle Information and Communication System)が既に展開されている。このうち、光ビーコンは近赤外線を通信媒体とした光通信を採用しており、車載機との双方通信が可能となっている。
具体的には、車両の保持するビーコン間の旅行時間情報等を含むアップリンク情報が車載機からインフラ側の光ビーコンに送信され、逆に、渋滞情報、区間旅行時間情報、事象規制情報及び車線通知情報等を含むダウンリンク情報が光ビーコンから車載機に送信されるようになっている。
【0003】
上記光ビーコンは、車載機との間で双方向通信を行う投受光器を備えており、この投受光器は、発光ダイオード(LED)からなるダウンリンク情報を送出するための投光部と、フォトセンサからなる車載機からのアップリンク情報を受光するための受光部とを備えている。
光ビーコンの投受光器(ビーコンヘッド)は、支柱等に支持されて道路上方に設置されており、その下方を通過する車載機との間で通信を行うための通信領域を、その直下よりも上流側よりに設定する。
【0004】
ビーコンヘッドは、自己よりも下流側に位置する道路上の停止線までの距離等といった、現在位置から所定位置までの距離情報を含んだダウンリンク情報を、前記通信領域内で送信することで、前記通信領域内に位置する車載機に対して前記距離情報を提供する。
前記通信領域内で前記距離情報を取得した車載機は、停止線等、所定位置の手前で停止するように車両を制御させたり、ドライバに停止や減速を促す報知を行うといった、ドライバに対する安全運転支援のための情報として、当該距離情報を利用することがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記ビーコンヘッドは、自装置が設定する通信領域を基準とした距離情報を車載通信機に送信するが、前記通信領域は、当該ビーコンヘッドの投光部及び受光部の位置に基づいて定まる。このため、前記距離情報は、予めビーコンヘッド(の投受光部)の位置を測量し、道路上の各位置との間の相対位置を明らかにした上で求められる。
【0007】
ここで、上記ビーコンヘッドの投光部及び受光部の位置を測量によって求めようとする場合、その筐体の外形を成す角部等、外形的に特徴のある点を複数定めてこれを測点とし、これら各測点の位置を測量した上で、その筐体の外形を推定し、投光部及び受光部の位置を推定するといった方法が考えられる。
しかし、上記方法では、一つのビーコンヘッドの位置を測量するために、複数の測点を測量しなければならない上に、筐体の外形を推定しさらに投光部及び受光部の位置を推定するので、誤差を含みやすく、さらに、測量の工数や、位置を推定するために必要な計算の工数を多く必要とするため、効率的とは言えない。
【0008】
本発明はこのような事情に鑑みてなされたものであり、精度よくかつ効率的に測量を行うことができる光ビーコンのビーコンヘッド、及び、ビーコンヘッドの測量方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)本発明は、車載機との間で路車間通信を行う光ビーコンのビーコンヘッドであって、アップリンク光の受光部とダウンリンク光の投光部とを有する筐体を備え、セオドライトを通した視準が可能なターゲットポイントが前記筐体の外面に設けられていることを特徴としている。
【0010】
上記のように構成されたビーコンヘッドによれば、セオドライトを通した視準が可能なターゲットポイントが筐体の外面に設けられているので、このターゲットポイントを測点とすることで、ビーコンヘッドにおける測点を明確にでき、精度よくビーコンヘッドの位置を測量することができる。
【0011】
(2)さらに、前記ターゲットポイントは、前記筐体の外面における前記投光部と前記受光部との間の位置に設けられていることが好ましく、この場合、ターゲットポイントの位置を、投光部及び受光部それぞれの位置とみなして測量することができる。つまり、ターゲットポイントの位置を測量すれば、投光部及び受光部の位置を把握することができ、上記従来例にて示した方法のように多数の測点を測量する場合と比較して、効率的に測量を行うことができる。また、多数の測点を測量することなくターゲットポイントの位置のみを測量し、受光部及び投光部の位置を求めるので、精度を低下させる要因を極力排除でき、精度よく測量することができる。
【0012】
(3)筐体の外面に目立つ模様等を付すことは、美感等の上で好ましくない。この点、前記ターゲットポイントは、ビーコンヘッドを設置し、その位置を測量した後は、不要となるため、前記筐体の表面に剥離自在に貼り付けられたシート部材によって構成してもよい。
この場合、ターゲットポイントを用いて測量を終えた後、ターゲットポイントを構成するシート部材を剥離することができ、美感の維持を図ることができる。
【0013】
(4)また、上記理由により、前記ターゲットポイントは、時間経過に伴って目立たなくなる劣化し易い塗料により前記筐体の外面に描かれた図柄よりなるものであってもよい。
この場合、ターゲットポイントを用いて測量を終えた後、放置しておけば、期間の経過によってターゲットポイントは目立たなくなるので、特にターゲットポイントを除去する作業等を要しない。
【0014】
(5)また、本発明は、コンパス機能とノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、上記光ビーコンのビーコンヘッドの測量方法であって、基準点に据え付けた前記トータルステーションから前記ターゲットポイントを視準するステップと、前記トータルステーションによって演算された前記ターゲットポイントの前記基準点に対する位置を取得するステップと、を含むことを特徴としている。
【0015】
上記のように構成された測量方法によれば、トータルステーションによってターゲットポイントを視準すれば、当該トータルステーションによって自動演算される基準点に対する位置を取得することができるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0016】
(6)また、本発明は、ノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、上記光ビーコンのビーコンヘッドの測量方法であって、第1基準点に据え付けた前記トータルステーションにより、第2基準点と前記ターゲットポイントとの間の水平角度を測定するステップと、測定した前記水平角度を入力情報として前記トータルステーションによって演算された前記ターゲットポイントの前記第1基準点に対する位置を取得するステップと、を含むことを特徴としている。
【0017】
上記のように構成された測量方法によれば、トータルステーションによって第2基準点とターゲットポイントとを視準し両者間の水平角度を測定すれば、当該トータルステーションによって演算される第1基準点に対する位置を取得することができるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0018】
また、本発明は、視準対象間の水平角度を測定可能なセオドライトを用いて行う上記光ビーコンのビーコンヘッドの測量方法であって、第1基準点に据え付けた前記セオドライトにより、第2基準点と前記ターゲットポイントとの間の第1水平角度を測定するステップと、前記第2基準点に据え付けた前記セオドライトにより、前記第1基準点と前記ターゲットポイントとの間の第2水平角度を測定するステップと、測定した前記第1及び第2水平角度を用いて前記ターゲットポイントの前記第1又は第2基準点に対する位置を演算するステップと、を含むことを特徴としている。
【0019】
上記のように構成された測量方法によれば、第1水平角度及び第2水平角度を測定し、得られた両水平角度を用いて位置を演算することで、精度よくビーコンヘッドの位置を測量することができる。
【発明の効果】
【0020】
本発明の光ビーコンのビーコンヘッド、及び、ビーコンヘッドの測量方法によれば、精度よくかつ効率的に測量を行うことができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係るビーコンヘッドを備えた光ビーコンが設置された道路の平面図である。
【図2】ビーコンヘッドを道路上から見たときの外観を示す斜視図である。
【図3】ビーコンヘッドの内部を示す斜視図である。
【図4】本実施形態の光ビーコンが、道路上に設定する通信領域を示す側面図である。
【図5】ビーコンヘッドの筐体の前面部の一部拡大図である。
【図6】ターゲットポイントの位置を測量する際の態様を示した道路の平面図である。
【図7】ターゲットポイントの位置を測量する際の他の態様を示した道路の平面図である。
【図8】他の実施形態に係るビーコンヘッドの斜視図である。
【図9】(a)は、ターゲットポイントを構成する図柄の他の態様を示す図であり、(b)は、(a)と異なる他の態様を示す図である。
【発明を実施するための形態】
【0022】
次に、本発明の好ましい実施形態について添付図面を参照しながら説明する。
図1は、本発明の一実施形態に係るビーコンヘッドを備えた光ビーコンが設置された道路の平面図である。
本実施形態の光ビーコン1は、道路Rを走行する車両Sに搭載された車載機S1との間で光信号による双方向通信を行うものであり、図に示すように、道路Rの上方に配置され車両Sに搭載された車載機S1と通信を行うためのビーコンヘッド2と、このビーコンヘッド2を制御するためのビーコン制御機3とを備えている。
【0023】
ビーコン制御機3は、道路脇に立設された支柱30等に設置されており、電話回線等の通信回線を介して交通管制システム等の図示しない中央装置と接続されており、ビーコンヘッド2の制御を行う。
ビーコンヘッド2は、支柱30から道路R側に水平に架設された架設バー31に固定され、道路Rの車線の直上に配置されており、車載機S1との間で通信可能な領域である通信領域Aを、道路R上に設定する。
【0024】
図2は、ビーコンヘッド2を道路R上から見たときの外観を示す斜視図である。ビーコンヘッド2は、内部機構を収納する筐体2aの両側面に固定されたブラケット32を介して架設バー31に固定されている。
筐体2aは、下側に向く下面部2a1と、下面部2a1と繋がるように形成され当該ビーコンヘッド2が設置されている道路R上の直下の位置よりも車両進行方向上流側斜め下方に向く前面部2a2とを有している。
下面部2a1には、一対の下側窓部4が形成されており、筐体2aの内部に配置された後述する車両検知部が当該ビーコンヘッド2直下を通過する車両Sを検知するための光信号を一対の窓部4を通じて送受信可能とされている。
また、前面部2a2には、第一窓部5と、この第一窓部5よりも幅の狭い第二窓部6が縦桟部2a3を挟んで形成されており、筐体2aの内部に配置された後述する投光部及び受光部が、これら両窓部5,6を通じて、道路R上を走行する車載機S1との間の通信に係る光信号を送受信可能とされている。
【0025】
図3は、ビーコンヘッド2の内部を示す斜視図である。なお、図3では、図2中のビーコンヘッド2の下面部2a1を上側にして設置した上で筐体2aを外したときの当該ビーコンヘッド2内部の外観を斜視図として示している。ビーコンヘッド2は、筐体2aの内部に、多数の発光ダイオード(LED)7aを配列してなる投光部7と、車載機S1から送信される近赤外線からなる光信号によるアップリンク情報を受信する受光部8とが実装された基板9を備えている。
【0026】
基板9は、投光部7が第一窓部5(図2)に、受光部8が第二窓部6(図2)に対応するように、筐体2aの前面部2a2の内側面に対向配置されている。従って、投光部7は、第一窓部5から筐体2aの外部を望むように前面部2a2に配置され、受光部8は、第二窓部6から筐体2aの外部を望むように前面部2a2に配置されている。
投光部7は、LED7aによって、道路R上の車載機S1に対して、近赤外線からなる光信号(ダウンリンク光)によるダウンリンク情報を、第一窓部5を通じて道路R上の所定の範囲に向けて送信する。
投光部7に隣接して基板9に実装されている受光部8は、送信される光信号を集光する集光レンズ10と、基板9上に固定され集光レンズ10を介して光信号を受信するための図示しない受光素子とを備えており、道路R上の車載機S1が送信する光信号(アップリンク光)であるアップリンク情報を、第二窓部6を通じて受信する。
【0027】
上記投光部7及び受光部8が実装された基板9は、上述のように、筐体2aの前面部2a2に対向配置されており、水平方向に対して(例えば、水平方向に対して30度の角度で)傾斜させて固定されている。これによって、投光部7は、当該ビーコンヘッド2の直下よりも車両進行方向上流側に向けてダウンリンク情報を送信する。また、受光部8は、当該ビーコンヘッド2の直下よりも上流側に位置する車載機S1からのアップリンク情報を受信する。
【0028】
また、ビーコンヘッド2は、上記投光部7、受光部8の他、ビーコンヘッド2の直下における車両Sの有無を検知するための車両検知部11を備えている。車両検知部11は、筐体2aの下面部2a1の内側に配置されており、一対の窓部4の内の一方を通じてビーコンヘッド2の直下に向けて発光する投光部11aと、道路R側からの反射光を他方の窓部4を通じて受光する受光部11bとを備えている。
車両検知部11は、投光部11aにより発光した光が道路R側で反射したときの反射光を受光部11bで受光するように構成されている。車両検知部11は、この反射光が車両Sに反射して返ってきた光であるか否かを判定することによって、車両の存在を検知するように構成されている。
【0029】
図4は、本実施形態の光ビーコン1が、道路R上に設定する通信領域Aを示す側面図である。光ビーコン1のビーコンヘッド2は、投光部7及び受光部8によって、道路R上の車載機S1との間で通信可能な領域である通信領域Aを、当該ビーコンヘッド2の直下よりも車両進行方向の上流側寄りに設定する。
この通信領域Aは、投光部7から光信号として送出されるダウンリンク情報によって定まるダウンリンク領域DA(図中実線のハッチング部分)と、受光部8が車載機S1から光信号として送信されるアップリンク情報を受信可能な範囲として設定されるアップリンク領域UA(図中破線のハッチング部分)とによって構成されている。
【0030】
光ビーコン(光学式車両感知器)の「近赤外線式インタフェース規格」によれば、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分と重複しており、ダウンリンク領域DAとアップリンク領域UAの上流端は互いに一致するものと規定されている。
上記規格に従って、本実施形態のダウンリンク領域DAは、ビーコンヘッド2(投光部7及び受光部8)の投受光位置d、道路R上の位置a、及び位置cを頂点とする△dacで示された範囲に設定されている。また、アップリンク領域UAは、位置a及び位置cの間に位置する位置b、投受光位置d、及び位置cを頂点とする△dbcで示された範囲に設定されている。ダウンリンク領域DAとアップリンク領域UAの上流端は、位置cで互いに一致し、アップリンク領域UAは、ダウンリンク領域DAの車両進行方向の上流部分と重複している。また、ダウンリンク領域DAの車両進行方向長さは、通信領域A全体の車両進行方向長さと一致している。
【0031】
本実施形態の光ビーコン1は、通信領域Aを通過する車載機S1と双方向通信を行うことで、車載機S1(車両S)の道路R上の位置を示す位置情報を当該車載機S1に送信する機能を有している。
具体的には、光ビーコン1は、アップリンク領域UA内で車載機S1がアップリンク情報を送信した送信位置を特定する機能を有しており、この特定した車載機S1の送信位置に基づいて、車載機S1の位置情報を得る。
光ビーコン1は、図4中、道路R上のビーコンヘッド2の投受光位置dを通過する垂線が道路Rと交わる位置である位置P0から、位置cまでの距離L1、及び、位置P0から、車両進行方向下流側に位置する停止線P2までの距離L2を予め記憶しており、車載機S1の前記送信位置を特定することによって、例えば、位置cから、現状の車載機S1の位置P1までの距離L3を、車載機S1の位置情報として求める。
光ビーコン1は、上記のようにして求めた、車載機S1の位置情報(距離L3)を、距離L1,L2を示す距離情報とともにダウンリンク情報に格納して当該車載機S1に送信する。
【0032】
車載機S1は、光ビーコン1から得た前記位置情報及び距離情報を利用して、ドライバに対する安全運転支援を行う。
例えば、車載機S1は、光ビーコン1からの前記位置情報及び距離情報に基づいて、車載機S1の位置P1から停止線P2までの距離を求める。そして、車載機S1は、前記位置情報及び距離情報の他、信号現示情報、車両Sの速度情報等に基づいて、停止線P2における車両Sの状況を予測し、必要に応じて、ドライバに注意喚起したり、停止線P2の手前で車両Sを減速させたり、自動停止させたりといった安全支援制御を行う。
【0033】
光ビーコン1は、道路R上に設置される際、位置P0からアップリンク領域UAの上流端である位置cまでの距離L1については、位置P0に対して、予め定められた所定の距離(例えば、5m)だけ上流側に離れた位置に位置するように設置される。
従って、車載機S1の位置情報(距離L3)から停止線P2までの距離を精度よく求めるには、位置P0を精度よく把握する必要がある。
ここで、位置P0は、ダウンリンク情報の送信及びアップリンク情報の受信を行う投受光部7,8の位置である投受光位置dによって定まるため、車載機S1に精度の高い位置情報を提供するためには、この投受光位置dを精度よく把握する必要がある。
このため、本実施形態において、投受光位置dに相当する投受光部7,8の位置は、ビーコンヘッド2を道路R上方に設置した後、その位置を測量することで把握される。
【0034】
図5は、ビーコンヘッド2の筐体2aの前面部2a2の一部拡大図である。図5及び図2を参照して、本実施形態のビーコンヘッド2の前面部2a2の縦桟部2a3には、投受光部7,8の位置を測量するためのターゲットポイント40が設けられている。
このターゲットポイント40は、セオドライトを通した視準が可能となるように筐体2aに設けられており、その外径は、例えば5mm程度に設定されている。
また、ターゲットポイント40は、例えば、時間経過に伴って目立たなくなる劣化し易い、耐水性、耐候性に劣る塗料を用いて、筐体2aの縦桟部2a3に描き、又は印刷することで設けられており、中心に設けられた中心点41と、中心点41の周囲に配置された複数の同心円42とからなる図柄によって構成されている。
ターゲットポイント40を描くために用いられる塗料としては、例えば、酢酸ビニルエマルジョン塗料を用いることができる。また、ターゲットポイント40の色は、筐体2aの塗装色にもよるが、黄色で描くことでセオドライト等を通じて視準する上で好適なものにすることができる。
【0035】
ターゲットポイント40は、縦桟部2a3の幅方向に対しては、ほぼ中央に設けられており、縦桟部2a3の長手方向に対しては、第一窓部5及び第二窓部6の内側に配置されている投光部7及び受光部8の位置とほぼ一致する位置に設けられている。このようにして、ターゲットポイント40は、互いに隣接配置された投光部7と受光部8との間に位置する縦桟部2a3に設けられているので、投光部7及び受光部8それぞれの近傍に配置される。このため、ターゲットポイント40は、道路R上からみて、投光部7及び受光部8の位置とほぼ一致する位置とみなすことができる。
従って、この筐体2a上におけるターゲットポイント40の位置を測量することで、投光部7及び受光部8の位置を精度よく把握することができる。
【0036】
次に、上記ターゲットポイント40を用いたビーコンヘッドの測量方法について説明する。図6は、上記ターゲットポイント40の位置を測量する際の態様を示した道路の平面図である。
ビーコンヘッドの位置を測量するには、まず、図に示すように、道路R脇の歩道等に位置する第1基準点k1にトータルステーション50を据え付け、道路R脇の歩道等に位置する第2基準点k2と、ターゲットポイント40とを視準し、第2基準点k2とターゲットポイント40との間の水平角度αを測定すると同時に、第1基準点からターゲットポイント40までの水平距離X1を測定する。
【0037】
上記トータルステーション50は、2点間の角度を測定するためのセオドライト(経緯儀)に、測距機能と、計測結果を演算するためのコンピュータとを備えたものであり、据え付けられた所定位置から測定対象物に対する水平方向と垂直方向の回転角度、及び、対象物までの距離を取得し、前記コンピュータによって位置を自動演算することができる。
また、本実施形態では、測量対象地点にプリズム等の反射板の設置が不要なノンプリズム方式の測距機能を有するものを用いている。これにより、測量対象地点に反射板を設置することなく、ターゲットポイント40を視準できる歩道上から当該ターゲットポイント40の位置をトータルステーション50によって測距測角することができ、投光部7及び受光部8の位置を求めることができる。このため、道路Rの通行規制等を行う必要がない。
【0038】
水平角度α及び水平距離X1を測定すると、トータルステーション50は、測定した水平角度α及び水平距離X1を取得し、これらに基づいてターゲットポイント40の位置及び高さを演算、出力する。このようにして、ターゲットポイント40の位置を取得することができる。
【0039】
なお、道路R上の交差点Jや、停止線P2、道路R自身の形状等についても、予め測量を行いその位置が把握される。従って、ターゲットポイント40(投受光位置d)の位置を上記のように求めれば、当該ターゲットポイント40の道路R上の位置を把握することができる。
【0040】
また、コンパス機能を備えたトータルステーションを用いた場合、当該トータルステーションは、第2基準点k2を用いずとも、自己が据え付けられた第1基準点k1に対する位置を取得することができる。
すなわち、コンパス機能を備えたトータルステーションは、自己の有するコンパス機能によって方位を把握することができる。例えば、図6中、紙面上側の方向が北である場合、トータルステーション50は、第1基準点k1を通過する北向きの基準線Hを把握することができるので、この基準線Hと、ターゲットポイント40との間の水平角度α´を求めることができる。
従って、トータルステーション50は、この水平角度α´と、水平距離X1とによって、第1基準点k1に対する位置を演算することができる。
つまりこの場合、トータルステーション50によってターゲットポイント40を視準すれば、当該トータルステーション50によって自動演算される第1基準点k1に対する位置を取得することができる。
【0041】
図7は、上記ターゲットポイント40の位置を測量する際の他の態様を示した道路の平面図である。
図7に示した測量方法は、道路Rを挟んで当該道路R脇に位置する二つの基準点である既知の第3基準点k3、及び既知の第4基準点k4に、セオドライト据え付けて測量を行う点において、図6の測量方法と相違している。
本方法では、まず、第3基準点k3にセオドライト51を据え付け、第4基準点k4と、ターゲットポイント40との間の第1水平角度βを測定する。
次いで、第4基準点k4にセオドライト51を据え付け、第3基準点k3と、ターゲットポイント40との間に第2水平角度γを測定する。
そして、測定した第1水平角度β及び第2水平角度γと、第3基準点k3と第4基準点k4との間の水平距離X2と、を用いて、ターゲットポイント40の位置を演算により求める。
【0042】
図6に示した方法と、図7に示した方法のいずれを用いても、ターゲットポイント40の位置を測量することでビーコンヘッド2の位置を把握することができるが、図6に示した方法では、第1基準点k1にトータルステーション50を設置し、ターゲットポイント40等を視準し水平角度を測定すれば、トータルステーション50によって第1基準点k1に対する位置が自動演算され、これを取得できるので、容易にかつ精度よくビーコンヘッドの位置を測量することができる。
【0043】
さらに、上述したようにコンパス機能を有するトータルステーションを用いれば、一つの基準点(第1基準点k1)のみで、第1基準点k1に対する位置を取得することができるので、より容易にビーコンヘッド2の位置を測量することができる。
【0044】
上記のように構成されたビーコンヘッド2によれば、セオドライトを通した視準が可能なターゲットポイント40が筐体2aの外面に設けられているので、このターゲットポイント40を測点とすることで、ビーコンヘッド2における測点を明確にでき、精度よくビーコンヘッド2の位置を測量することができる。
【0045】
また、本実施形態では、互いに隣接配置された投光部7と受光部8との間の位置である縦桟部2a3に設けられているので、このターゲットポイント40の位置を、投光部7及び受光部8それぞれの位置とみなして測量することができる。つまり、ターゲットポイント40の位置を測量すれば、投光部7及び受光部8の位置を測量することができ、上記従来例にて示した方法のように多数の測点を測量する場合と比較して、効率的に測量を行うことができる。また、多数の測点を測量することなくターゲットポイント40の位置のみを測量し、投光部7及び受光部8の位置を求めるので、精度を低下させる要因を極力排除でき、精度よく測量することができる。
【0046】
また、筐体2aの外面に目立つ模様等を付すことは、美感等の上で好ましくない。この点、上記ターゲットポイント40は、ビーコンヘッド2を設置し、その位置を測量した後は、不要となるため、本実施形態のターゲットポイント40は、耐水性、耐候性に劣る塗料といったように、時間経過に伴って目立たなくなる劣化し易い塗料により筐体2aの外面に描かれた図柄とされている。これによって、ターゲットポイント40を用いて測量を終えた後、放置しておけば、特に除去する作業等を行わなくても、期間の経過によって当該ターゲットポイント40は目立たなくすることができる。
【0047】
図8は、他の実施形態に係るビーコンヘッド2の斜視図である。図8に示すビーコンヘッド2において、ターゲットポイント40は、シール等のシート部材40aの表面にターゲットポイント40を構成するための図柄を印刷することによって構成されており、シート部材40aを縦桟部2a3に貼り付けることで、筐体2aに設けられている。
【0048】
本実施形態のターゲットポイント40は、さらに、一端がシート部材40aに固着された紐状部材43を備えている。この紐状部材43は、シート部材40aから、架設バー31(図1)及び支柱30(図1)をつたわせて配置されており、その他端が下方にまで延ばされている。ターゲットポイント40を構成するシート部材40aは、この紐状部材43の他端を歩道上の作業者等が引っ張ることで、ビーコンヘッド2の筐体2aから剥離させることができる。
このように、本実施形態では、ターゲットポイント40が剥離自在に貼り付けられたシート部材40aによって構成されているので、ターゲットポイント40を用いて測量を終え、当該ターゲットポイント40が不要になれば、シート部材40aを剥離してターゲットポイント40自体を無くすことができる。これによって、筐体2aの外面における美感の維持を図ることができる。
【0049】
なお、本発明は、上記実施形態に限定されることはない。例えば、図8において、シート部材40aと、シート部材40aを剥離するための紐状部材43とを備えたターゲットポイント40を示したが、シート部材40aを貼り付けるために用いる接着剤として、屋外に暴露したときに数日〜数週間で剥離する程度の弱い接着力の接着剤を用いれば、紐状部材43を設けずとも、数日〜数週間といった所定の期間が経過することで、シート部材40aを筐体2aから剥離させることができる。
【0050】
また、上記実施形態では、ターゲットポイント40は、中心点41と、複数の同心円42とからなる図柄によって構成した場合を例示したが、例えば、図9(a)に示すように、中心点41と、この中心点41で直交する2つの直線44とによって構成してもよいし、図9(b)に示すように、中心点41と、複数の同心円42と、中心点41で直交する2つの直線44とによって構成してもよい。
【0051】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0052】
2 ビーコンヘッド
2a 筐体
7 投光部
8 受光部
40 ターゲットポイント
40a シート部材
50 トータルステーション
51 セオドライト
k1 第1基準点
k2 第2基準点
k3 第3基準点(第1基準点)
k4 第4基準点(第2基準点)
α 水平角度
β 第1水平角度
γ 第2水平角度
S1 車載機
【特許請求の範囲】
【請求項1】
車載機との間で路車間通信を行う光ビーコンのビーコンヘッドであって、
アップリンク光の受光部とダウンリンク光の投光部とを有する筐体を備え、
セオドライトを通した視準が可能なターゲットポイントが前記筐体の外面に設けられていることを特徴とする光ビーコンのビーコンヘッド。
【請求項2】
前記ターゲットポイントは、前記筐体の外面における前記投光部と前記受光部との間の位置に設けられている請求項1に記載の光ビーコンのビーコンヘッド。
【請求項3】
前記ターゲットポイントは、前記筐体の表面に剥離自在に貼り付けられたシート部材によって構成されている請求項1又は2に記載の光ビーコンのビーコンヘッド。
【請求項4】
前記ターゲットポイントは、時間経過に伴って目立たなくなる劣化し易い塗料により前記筐体の外面に描かれた図柄よりなる請求項1又は2に記載の光ビーコンのビーコンヘッド。
【請求項5】
コンパス機能とノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
基準点に据え付けた前記トータルステーションから前記ターゲットポイントを視準するステップと、
前記トータルステーションによって演算された前記ターゲットポイントの前記基準点に対する位置を取得するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【請求項6】
ノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
第1基準点に据え付けた前記トータルステーションにより、第2基準点と前記ターゲットポイントとの間の水平角度を測定するステップと、
測定した前記水平角度を入力情報として前記トータルステーションによって演算された前記ターゲットポイントの前記第1基準点に対する位置を取得するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【請求項7】
視準対象間の水平角度を測定可能なセオドライトを用いて行う請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
第1基準点に据え付けた前記セオドライトにより、第2基準点と前記ターゲットポイントとの間の第1水平角度を測定するステップと、
前記第2基準点に据え付けた前記セオドライトにより、前記第1基準点と前記ターゲットポイントとの間の第2水平角度を測定するステップと、
測定した前記第1及び第2水平角度を用いて前記ターゲットポイントの前記第1又は第2基準点に対する位置を演算するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【請求項1】
車載機との間で路車間通信を行う光ビーコンのビーコンヘッドであって、
アップリンク光の受光部とダウンリンク光の投光部とを有する筐体を備え、
セオドライトを通した視準が可能なターゲットポイントが前記筐体の外面に設けられていることを特徴とする光ビーコンのビーコンヘッド。
【請求項2】
前記ターゲットポイントは、前記筐体の外面における前記投光部と前記受光部との間の位置に設けられている請求項1に記載の光ビーコンのビーコンヘッド。
【請求項3】
前記ターゲットポイントは、前記筐体の表面に剥離自在に貼り付けられたシート部材によって構成されている請求項1又は2に記載の光ビーコンのビーコンヘッド。
【請求項4】
前記ターゲットポイントは、時間経過に伴って目立たなくなる劣化し易い塗料により前記筐体の外面に描かれた図柄よりなる請求項1又は2に記載の光ビーコンのビーコンヘッド。
【請求項5】
コンパス機能とノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
基準点に据え付けた前記トータルステーションから前記ターゲットポイントを視準するステップと、
前記トータルステーションによって演算された前記ターゲットポイントの前記基準点に対する位置を取得するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【請求項6】
ノンプリズム方式の測距機能を有し、自身から視準対象までの相対的な位置を自動演算可能なトータルステーションを用いて行う、請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
第1基準点に据え付けた前記トータルステーションにより、第2基準点と前記ターゲットポイントとの間の水平角度を測定するステップと、
測定した前記水平角度を入力情報として前記トータルステーションによって演算された前記ターゲットポイントの前記第1基準点に対する位置を取得するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【請求項7】
視準対象間の水平角度を測定可能なセオドライトを用いて行う請求項1〜4のいずれか1項に記載の光ビーコンのビーコンヘッドの測量方法であって、
第1基準点に据え付けた前記セオドライトにより、第2基準点と前記ターゲットポイントとの間の第1水平角度を測定するステップと、
前記第2基準点に据え付けた前記セオドライトにより、前記第1基準点と前記ターゲットポイントとの間の第2水平角度を測定するステップと、
測定した前記第1及び第2水平角度を用いて前記ターゲットポイントの前記第1又は第2基準点に対する位置を演算するステップと、
を含むことを特徴とする光ビーコンのビーコンヘッドの測量方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−242835(P2011−242835A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−111809(P2010−111809)
【出願日】平成22年5月14日(2010.5.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]