
光ファイバ・ジャイロスコープ振動誤差抑制の方法およびシステム
【課題】光ファイバ・ジャイロ・センサにおいて振動誤差の抑制を実施するシステムおよび方法を提供する。
【解決手段】一例のシステムは、光源、感知ループ組立体、光検出器、および処理コンポーネントを含む。光源は光信号を発生し、次にこの光信号は、感知ループ組立体によって変調されて、組立体内の光ファイバ・コイルへ印加される。光検出器は、感知ループ組立体(コイル)の出力である変調された光信号を受け取り、アナログ信号を発生する。処理コンポーネントは、発生されたアナログ信号を、変調されたデジタル信号へと変換し、この変調されたデジタル信号の平均値を求め、求められた変調されたデジタル信号の平均値に基づいて強度変調振幅を求め、求めた強度変調振幅に基づいて、変調されたデジタル位相信号をリスケールする。
【解決手段】一例のシステムは、光源、感知ループ組立体、光検出器、および処理コンポーネントを含む。光源は光信号を発生し、次にこの光信号は、感知ループ組立体によって変調されて、組立体内の光ファイバ・コイルへ印加される。光検出器は、感知ループ組立体(コイル)の出力である変調された光信号を受け取り、アナログ信号を発生する。処理コンポーネントは、発生されたアナログ信号を、変調されたデジタル信号へと変換し、この変調されたデジタル信号の平均値を求め、求められた変調されたデジタル信号の平均値に基づいて強度変調振幅を求め、求めた強度変調振幅に基づいて、変調されたデジタル位相信号をリスケールする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ファイバ・ジャイロスコープに関する。より詳細には、本発明は、光ファイバ・ジャイロ・センサにおいて振動誤差抑制を行う方法およびシステムに関する。
【背景技術】
【0002】
近年、光ファイバ・ジャイロスコープ(FOG)は、航空宇宙機などの様々な物体の回転および角度方向を感知するための幾つかの技術に広く使用されるようになっている。FOGは、典型的には、回転(即ち、感知されるべき回転)の軸の周りにコイルの形に巻かれた、数キロメートルの長さであることが多い、光ファイバを含む。光は、相反する方向に、コイルを介して入れられて、光検出器へと送られる。コイルを軸の周りで回転させた場合、コイル内の一方の方向に進行する光の実効光路長は増加するのに対して、その反対方向に進行する光について経路長は減少する(図1を参照)。
【0003】
経路長の差により、サニャック効果として知られる位相偏移が、相反する方向(互いに反対となる方向)に進行する光波の間に生じる。この結果、FOGが回転していることを示す干渉パターンが光検出器によって検出される。光検出器からの出力信号は、通常、コサイン関数に従う。つまり、出力信号は、2つの波の間の位相差のコサインによって決まる。従って、コサイン関数が偶関数であるので、ゼロ付近の変化率は非常に小さく、そのため低い回転速度では感度がよくない。感度を改善するには、ある特定の電圧で波を変調して、ゼロから外れる或る位相差を生成することが多い。変調電圧によって生成される実際の位相は、光の位相を180°(即ち、πラジアン)変化させる電圧Vπが基準となる。この位相変調基準電圧Vπは、波長と、温度、湿度および圧力などの環境要因とによって決まる。
【0004】
ある回転速度によって引き起こされるサニャック位相偏移の振幅が、FOG「スケール・ファクタ(scale factor)」を決定し、このスケール・ファクタは、検出された位相差を、FOGの実際の回転と、数値的に関係づける。ファイバ感知コイルの長さおよび直径が増大するにつれてスケール・ファクタも増大し、その結果として、FOGは回転に対する感度がより高くなる。FOGスケール・ファクタはまた、ファイバ感知コイル内を伝搬する光の波長にも依存する。
【0005】
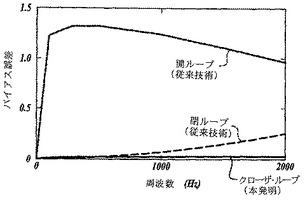
干渉型光ファイバ・ジャイロ(IFOG)では、光信号経路のコンポーネントを通じて、振動が強度の変動を引き起こすことがある。振動はまた、IFOG感知コイルの物理的な回転を通じて、位相の変動も引き起こす。強度変調と位相変調が同期性であるときには、整流バイアス誤差(rectified bias error)が発生する。海軍の潜水艦発射弾道ミサイル(SLBM)および空軍の大陸間弾道弾(ICBM)の誘導プログラムは、両方とも、ブースタ段階中や段分離中などの過酷な振動環境の状況のもとで、IFOGが最小限の整流バイアス誤差を示すことを要求している(図2および3参照)。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、振動誘起型の強度変調を抑制し、それによって振動誘起型のバイアス誤差を低減させるための技術が必要とされている。
【課題を解決するための手段】
【0007】
本発明は、光ファイバ・ジャイロ・センサにおいて振動誤差抑制を行うシステムおよび方法を提供する。一例のシステムは、光源、感知ループ組立体、光検出器、および処理コンポーネントを含む。光源は、組立体内の光ファイバ・コイルへ印加される光信号を発生する。FOGの光路内の光強度は、振動源が存在する状態で変調される。光検出器は、感知ループ組立体(コイル)の出力である、変調された強度信号と位相信号の両方を含む変調された光信号を受け取り、アナログ信号を発生する。処理コンポーネントは、発生されたアナログ信号を、変調されたデジタル信号へと変換し、その変調デジタル信号の平均値に基づいて強度変調振幅を決定する。次に、変調された強度振幅は、変調された位相信号をリスケール(rescale)するために用いられて、振動誘起型の回転速度誤差を解消する。
【0008】
本発明の一態様では、処理コンポーネントは、リスケールされた変調デジタル信号に基づきアナログ変調信号を発生し、この発生されたアナログ変調信号に基づき感知ループ組立体を制御する。
【0009】
添付の図面を参照して、本発明の好ましい実施形態および代替の実施形態を以下に詳細に説明する。
【発明を実施するための最良の形態】
【0010】
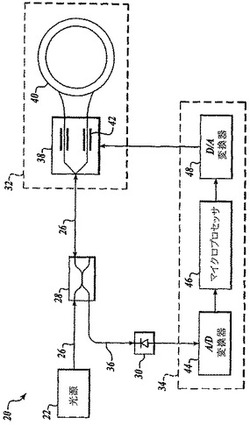
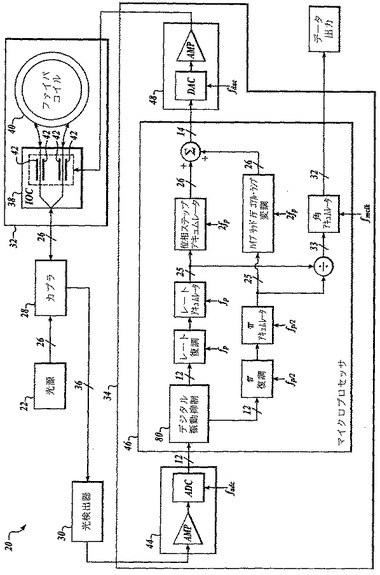
図3は、本発明の一実施形態に従って構成された光ファイバ・ジャイロスコープ・システム20を示す。システム20は、光源22、光結合器28、光検出器30、感知ループ組立体32、処理サブシステム34、およびシステム20の様々なコンポーネントを相互接続する光ファイバ線26、36を含む。
【0011】
光源22は、ファイバ光源(FLS)組立体などのような、光ファイバ・ジャイロスコープで典型的に使用される任意の光源である。一実施形態では、この光源は980nm半導体ポンプ・レーザを含み、これは、波長が約1532nmで帯域幅が約35nmの光を発生できるエルビウム・ドープ・ファイバ(EDF)を含む。
【0012】
図示の実施形態では、光結合器28は、当技術分野で一般に理解されている50/50結合器(カプラ)またはスプリッタである。結合器28は、光ファイバ線26を介して光源22、光検出器30、および感知ループ組立体32に結合される。結合器28は、光をその光源22から受け取り、他方の少なくとも2つの端子(即ち、出力)の間で光を分割する。結合器28を通して光源22から送られた光は2つの「部分」に分割され、一方の部分は感知ループ組立体32へ送られ、他方の部分は使用されない。反対方向に進行する(即ち、感知ループ組立体32から戻る)光は、一つの部分が光検出器30へ送り返されるように分割される。光検出器30は、結合器28と処理サブシステム34との間に接続され、フォトダイオードを含むことができる。
【0013】
感知ループ組立体32は、集積光学チップ(IOC)38、およびファイバ感知コイル40を含む。IOC38は、一般に理解されている電気光学結晶位相変調器である。IOC38は、光ファイバ線26を介して結合器28に結合され、また、一連の電極42に結合された「Y」スプリッタを含む。このYスプリッタは、光ファイバ線26からの光を、ファイバ・コイル40内のファイバ光セグメントへと分割し、この分割した光を変調するために電極42が使用される。本発明は、様々な種類の位相変調器を用いて実施されてよいが、一実施形態では、IOC38は「矩形波」バイアス変調を用い、LiNbO3を使用して製作される。ファイバ感知コイル40は、長さが例えば1〜6kmの光ファイバ・ケーブルの巻線である。
【0014】
処理サブシステム34は、フィールド・プログラマブル・ゲート・アレイ(FPGA)、特定用途向け集積回路(ASIC)などの様々な回路および集積回路を含む電子コンポーネント、および/または、コンピュータ可読媒体に記憶され、計算システムによって実行され、下記の方法および処理を実施する命令を含む。処理サブシステム34は、アナログ−デジタル・コンバータ(ADC)44、マイクロプロセッサ46、およびデジタル−アナログ・コンバータ(DAC)48を含む。ADC44は、光検出器30から受け取ったアナログ信号を、それを表すデジタル・データへと変換し、そのデジタル・データをマイクロプロセッサ46へ供給する。DAC48は、マイクロプロセッサ46の出力へ続いて接続される。DAC48は、一般に知られているように、マイクロプロセッサ46から供給されたデジタル・データを、それを表すアナログ信号へと変換する。DAC48の出力は、感知ループ組立体32内のIOC38へ接続される。マイクロプロセッサ46は、ADC44とDAC48の間に結合される。
【0015】
図4に示される一実施形態では、ADC44は増幅器およびADCを含む。マイクロプロセッサ46は、ADCとデータ通信するデジタル振動抑制コンポーネント80を含む。デジタル振動抑制コンポーネント80は、振動による強度変動を求める。振動による強度変動は、2つの隣接する電圧レベルの和から得られるAC強度信号である。次に、デジタル振動抑制コンポーネント80は、決定された振動強度変動(即ち、強度変調)に基づいて、振動誘起型バイアス誤差を低減させる。デジタル振動抑制コンポーネント80は、その結果を、レート復調器およびπ復調器へ出力する。マイクロプロセッサ46で実施される他の処理は、既知のデジタル信号処理技術に従って実施される。
【0016】
図5に示されるように、一例の処理100は、デジタル振動抑制コンポーネント80によって実施される。まず、ブロック102で、復調信号の平均値を用いて、強度変調の振幅が決定される。
【0017】
式1は、強度および位相の変調を伴う光検出器30での信号である。
【0018】
【数1】

【0019】
α:強度変調
β:位相変調
Δφm:変調深度(modulation depth)
Vo:変調されていないDC電圧
【0020】
式1の強度変調は、振動源が存在する状態で誘起される。位相変調は、ジャイロの実際の回転または振動に由来する。図4の一実施形態では、回転レート(速度)の変化を検出するためらバイアスを発生するように、IOC38へ矩形位相変調が適用される。矩形波の周波数は、ファイバ・コイル40の長さによって決まる。ループ通行時間(τ)は、光がファイバ・コイルの一方の端部から他方の端部まで進むのに必要な時間と定義される。
【0021】
デジタル振動抑制コンポーネント80内でのデジタル処理は、隣接するループ通行時間の2つの信号の和および差を含む。
【0022】
【数2】
【0023】
【数3】
【0024】
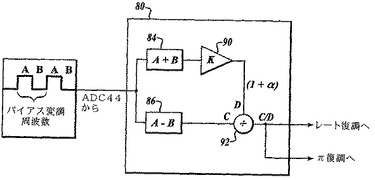
式2は、図6の84のA+B(式3は86のA−B)に適用され得る。VDMODおよびVAVGを正確に測定し、処理して、強度変調振幅について解を得ることができる。デジタル処理では、強度変調振幅は、式(4)に示されるように解くことができる。
【0025】
【数4】
【0026】
DAVG:検出入力の2τ平均値
DDC:検出入力の平均値
BIT:ADCビット深度
ΔVADC:ADC入力範囲
η:フロント・エンド利得
Ns:サンプル数
【0027】
復調信号から位相変調信号をリスケール(rescale)するために強度変調振幅が用いられて、式(7)に示されるような振動誘起型の誤差のないジャイロ回転速度が得られる。
【0028】
【数5】
【0029】
図6は、信号処理を簡素化し、式(1)から(5)の数学計算をまとめた別の図である。デジタル信号82は、ADC44によってコンポーネント80へ送られる。デジタル信号82は、式(2)および(3)においてV(−Δφm)である第1の振幅Aと、V(Δφm)である第2の振幅Bとを含む。コンポーネント80では、ブロック84でAがBに加算され、ブロック86でAからBが減算される。利得K90が、ブロック84の加算結果に適用される。ブロック86の差分の結果は、除算器92において、利得K90の出力により除算されるが、この演算は、式「出力=(A−B)/[1+K(A+B)]」に従う。除算器92の結果は、レート復調器およびπ復調器へ送られる。
【0030】
同じ振動誤差抑制技術を、振動誘起型の誤差の補正のためのリスケールを行うように、他のジャイロ信号にも適用可能であることは、当業者には容易に理解されよう。限定ではないが、それらの信号は、位相変調基準電圧、相対強度ノイズ監視信号、固有周波数サーボ監視信号、および搬送波抑圧変調信号を含む。
【図面の簡単な説明】
【0031】
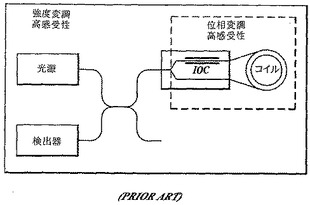
【図1】図1は、従来技術を示す概略図である。
【図2】図2は、従来技術および本発明によって生成された振動誤差を示すグラフである。
【図3】図3は、本発明により構成された一例のシステムの概略図である。
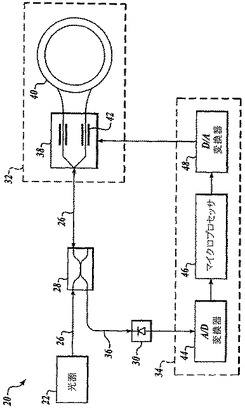
【図4】図4は、本発明により構成された一例のシステムの概略図である。
【図5】図5は、図3および図4に示されたシステムによって実行される一例の処理の流れ図を示す。
【図6】図6は、本発明により構成された一例の論理の流れの図を示す。
【技術分野】
【0001】
本発明は、光ファイバ・ジャイロスコープに関する。より詳細には、本発明は、光ファイバ・ジャイロ・センサにおいて振動誤差抑制を行う方法およびシステムに関する。
【背景技術】
【0002】
近年、光ファイバ・ジャイロスコープ(FOG)は、航空宇宙機などの様々な物体の回転および角度方向を感知するための幾つかの技術に広く使用されるようになっている。FOGは、典型的には、回転(即ち、感知されるべき回転)の軸の周りにコイルの形に巻かれた、数キロメートルの長さであることが多い、光ファイバを含む。光は、相反する方向に、コイルを介して入れられて、光検出器へと送られる。コイルを軸の周りで回転させた場合、コイル内の一方の方向に進行する光の実効光路長は増加するのに対して、その反対方向に進行する光について経路長は減少する(図1を参照)。
【0003】
経路長の差により、サニャック効果として知られる位相偏移が、相反する方向(互いに反対となる方向)に進行する光波の間に生じる。この結果、FOGが回転していることを示す干渉パターンが光検出器によって検出される。光検出器からの出力信号は、通常、コサイン関数に従う。つまり、出力信号は、2つの波の間の位相差のコサインによって決まる。従って、コサイン関数が偶関数であるので、ゼロ付近の変化率は非常に小さく、そのため低い回転速度では感度がよくない。感度を改善するには、ある特定の電圧で波を変調して、ゼロから外れる或る位相差を生成することが多い。変調電圧によって生成される実際の位相は、光の位相を180°(即ち、πラジアン)変化させる電圧Vπが基準となる。この位相変調基準電圧Vπは、波長と、温度、湿度および圧力などの環境要因とによって決まる。
【0004】
ある回転速度によって引き起こされるサニャック位相偏移の振幅が、FOG「スケール・ファクタ(scale factor)」を決定し、このスケール・ファクタは、検出された位相差を、FOGの実際の回転と、数値的に関係づける。ファイバ感知コイルの長さおよび直径が増大するにつれてスケール・ファクタも増大し、その結果として、FOGは回転に対する感度がより高くなる。FOGスケール・ファクタはまた、ファイバ感知コイル内を伝搬する光の波長にも依存する。
【0005】
干渉型光ファイバ・ジャイロ(IFOG)では、光信号経路のコンポーネントを通じて、振動が強度の変動を引き起こすことがある。振動はまた、IFOG感知コイルの物理的な回転を通じて、位相の変動も引き起こす。強度変調と位相変調が同期性であるときには、整流バイアス誤差(rectified bias error)が発生する。海軍の潜水艦発射弾道ミサイル(SLBM)および空軍の大陸間弾道弾(ICBM)の誘導プログラムは、両方とも、ブースタ段階中や段分離中などの過酷な振動環境の状況のもとで、IFOGが最小限の整流バイアス誤差を示すことを要求している(図2および3参照)。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って、振動誘起型の強度変調を抑制し、それによって振動誘起型のバイアス誤差を低減させるための技術が必要とされている。
【課題を解決するための手段】
【0007】
本発明は、光ファイバ・ジャイロ・センサにおいて振動誤差抑制を行うシステムおよび方法を提供する。一例のシステムは、光源、感知ループ組立体、光検出器、および処理コンポーネントを含む。光源は、組立体内の光ファイバ・コイルへ印加される光信号を発生する。FOGの光路内の光強度は、振動源が存在する状態で変調される。光検出器は、感知ループ組立体(コイル)の出力である、変調された強度信号と位相信号の両方を含む変調された光信号を受け取り、アナログ信号を発生する。処理コンポーネントは、発生されたアナログ信号を、変調されたデジタル信号へと変換し、その変調デジタル信号の平均値に基づいて強度変調振幅を決定する。次に、変調された強度振幅は、変調された位相信号をリスケール(rescale)するために用いられて、振動誘起型の回転速度誤差を解消する。
【0008】
本発明の一態様では、処理コンポーネントは、リスケールされた変調デジタル信号に基づきアナログ変調信号を発生し、この発生されたアナログ変調信号に基づき感知ループ組立体を制御する。
【0009】
添付の図面を参照して、本発明の好ましい実施形態および代替の実施形態を以下に詳細に説明する。
【発明を実施するための最良の形態】
【0010】
図3は、本発明の一実施形態に従って構成された光ファイバ・ジャイロスコープ・システム20を示す。システム20は、光源22、光結合器28、光検出器30、感知ループ組立体32、処理サブシステム34、およびシステム20の様々なコンポーネントを相互接続する光ファイバ線26、36を含む。
【0011】
光源22は、ファイバ光源(FLS)組立体などのような、光ファイバ・ジャイロスコープで典型的に使用される任意の光源である。一実施形態では、この光源は980nm半導体ポンプ・レーザを含み、これは、波長が約1532nmで帯域幅が約35nmの光を発生できるエルビウム・ドープ・ファイバ(EDF)を含む。
【0012】
図示の実施形態では、光結合器28は、当技術分野で一般に理解されている50/50結合器(カプラ)またはスプリッタである。結合器28は、光ファイバ線26を介して光源22、光検出器30、および感知ループ組立体32に結合される。結合器28は、光をその光源22から受け取り、他方の少なくとも2つの端子(即ち、出力)の間で光を分割する。結合器28を通して光源22から送られた光は2つの「部分」に分割され、一方の部分は感知ループ組立体32へ送られ、他方の部分は使用されない。反対方向に進行する(即ち、感知ループ組立体32から戻る)光は、一つの部分が光検出器30へ送り返されるように分割される。光検出器30は、結合器28と処理サブシステム34との間に接続され、フォトダイオードを含むことができる。
【0013】
感知ループ組立体32は、集積光学チップ(IOC)38、およびファイバ感知コイル40を含む。IOC38は、一般に理解されている電気光学結晶位相変調器である。IOC38は、光ファイバ線26を介して結合器28に結合され、また、一連の電極42に結合された「Y」スプリッタを含む。このYスプリッタは、光ファイバ線26からの光を、ファイバ・コイル40内のファイバ光セグメントへと分割し、この分割した光を変調するために電極42が使用される。本発明は、様々な種類の位相変調器を用いて実施されてよいが、一実施形態では、IOC38は「矩形波」バイアス変調を用い、LiNbO3を使用して製作される。ファイバ感知コイル40は、長さが例えば1〜6kmの光ファイバ・ケーブルの巻線である。
【0014】
処理サブシステム34は、フィールド・プログラマブル・ゲート・アレイ(FPGA)、特定用途向け集積回路(ASIC)などの様々な回路および集積回路を含む電子コンポーネント、および/または、コンピュータ可読媒体に記憶され、計算システムによって実行され、下記の方法および処理を実施する命令を含む。処理サブシステム34は、アナログ−デジタル・コンバータ(ADC)44、マイクロプロセッサ46、およびデジタル−アナログ・コンバータ(DAC)48を含む。ADC44は、光検出器30から受け取ったアナログ信号を、それを表すデジタル・データへと変換し、そのデジタル・データをマイクロプロセッサ46へ供給する。DAC48は、マイクロプロセッサ46の出力へ続いて接続される。DAC48は、一般に知られているように、マイクロプロセッサ46から供給されたデジタル・データを、それを表すアナログ信号へと変換する。DAC48の出力は、感知ループ組立体32内のIOC38へ接続される。マイクロプロセッサ46は、ADC44とDAC48の間に結合される。
【0015】
図4に示される一実施形態では、ADC44は増幅器およびADCを含む。マイクロプロセッサ46は、ADCとデータ通信するデジタル振動抑制コンポーネント80を含む。デジタル振動抑制コンポーネント80は、振動による強度変動を求める。振動による強度変動は、2つの隣接する電圧レベルの和から得られるAC強度信号である。次に、デジタル振動抑制コンポーネント80は、決定された振動強度変動(即ち、強度変調)に基づいて、振動誘起型バイアス誤差を低減させる。デジタル振動抑制コンポーネント80は、その結果を、レート復調器およびπ復調器へ出力する。マイクロプロセッサ46で実施される他の処理は、既知のデジタル信号処理技術に従って実施される。
【0016】
図5に示されるように、一例の処理100は、デジタル振動抑制コンポーネント80によって実施される。まず、ブロック102で、復調信号の平均値を用いて、強度変調の振幅が決定される。
【0017】
式1は、強度および位相の変調を伴う光検出器30での信号である。
【0018】
【数1】
【0019】
α:強度変調
β:位相変調
Δφm:変調深度(modulation depth)
Vo:変調されていないDC電圧
【0020】
式1の強度変調は、振動源が存在する状態で誘起される。位相変調は、ジャイロの実際の回転または振動に由来する。図4の一実施形態では、回転レート(速度)の変化を検出するためらバイアスを発生するように、IOC38へ矩形位相変調が適用される。矩形波の周波数は、ファイバ・コイル40の長さによって決まる。ループ通行時間(τ)は、光がファイバ・コイルの一方の端部から他方の端部まで進むのに必要な時間と定義される。
【0021】
デジタル振動抑制コンポーネント80内でのデジタル処理は、隣接するループ通行時間の2つの信号の和および差を含む。
【0022】
【数2】
【0023】
【数3】
【0024】
式2は、図6の84のA+B(式3は86のA−B)に適用され得る。VDMODおよびVAVGを正確に測定し、処理して、強度変調振幅について解を得ることができる。デジタル処理では、強度変調振幅は、式(4)に示されるように解くことができる。
【0025】
【数4】
【0026】
DAVG:検出入力の2τ平均値
DDC:検出入力の平均値
BIT:ADCビット深度
ΔVADC:ADC入力範囲
η:フロント・エンド利得
Ns:サンプル数
【0027】
復調信号から位相変調信号をリスケール(rescale)するために強度変調振幅が用いられて、式(7)に示されるような振動誘起型の誤差のないジャイロ回転速度が得られる。
【0028】
【数5】
【0029】
図6は、信号処理を簡素化し、式(1)から(5)の数学計算をまとめた別の図である。デジタル信号82は、ADC44によってコンポーネント80へ送られる。デジタル信号82は、式(2)および(3)においてV(−Δφm)である第1の振幅Aと、V(Δφm)である第2の振幅Bとを含む。コンポーネント80では、ブロック84でAがBに加算され、ブロック86でAからBが減算される。利得K90が、ブロック84の加算結果に適用される。ブロック86の差分の結果は、除算器92において、利得K90の出力により除算されるが、この演算は、式「出力=(A−B)/[1+K(A+B)]」に従う。除算器92の結果は、レート復調器およびπ復調器へ送られる。
【0030】
同じ振動誤差抑制技術を、振動誘起型の誤差の補正のためのリスケールを行うように、他のジャイロ信号にも適用可能であることは、当業者には容易に理解されよう。限定ではないが、それらの信号は、位相変調基準電圧、相対強度ノイズ監視信号、固有周波数サーボ監視信号、および搬送波抑圧変調信号を含む。
【図面の簡単な説明】
【0031】
【図1】図1は、従来技術を示す概略図である。
【図2】図2は、従来技術および本発明によって生成された振動誤差を示すグラフである。
【図3】図3は、本発明により構成された一例のシステムの概略図である。
【図4】図4は、本発明により構成された一例のシステムの概略図である。
【図5】図5は、図3および図4に示されたシステムによって実行される一例の処理の流れ図を示す。
【図6】図6は、本発明により構成された一例の論理の流れの図を示す。
【特許請求の範囲】
【請求項1】
振動誤差の抑制を行う方法であって、
変調された光信号を、感知ループ組立体から光検出器で受け取るステップと、
受け取った前記光信号を、変調されたアナログ信号に生成するステップと、
生成した前記アナログ信号を、変調されたデジタル信号へと変換するステップと、
前記変調された前記デジタル信号の強度変調を求めるステップと、
前記強度変調の振幅を求めるステップと、
決定された前記強度変調の振幅に基づいて、前記変調されたデジタル位相信号をリスケールするステップと
を備える方法。
【請求項2】
請求項1に記載の方法であって、リスケールされた前記変調されたデジタル信号に基づいて、アナログ変調信号を生成するステップと、生成された前記アナログ変調信号に基づいて、前記感知ループ組立体を制御するステップとを更に備える方法。
【請求項3】
振動誤差の抑制を行うシステムであって、
光信号を発生するように構成された光源と、
発生された前記光信号を、変調するため、および光ファイバ・コイル内で、互いに反対となる方向へ伝達するように構成された感知ループ組立体と、
前記感知ループ組立体の出力である変調された光信号を受け取り、アナログ信号を発生するように構成された光検出器と、
発生された前記アナログ信号を、変調されたデジタル信号へと変換し、前記変調されたデジタル信号の強度変調を求め、前記強度変調の振幅を求め、求められた前記強度変調の振幅に基づいて、前記変調されたデジタル信号をリスケールするように構成された処理コンポーネントと
を備えるシステム。
【請求項4】
請求項3に記載のシステムであって、前記処理コンポーネントが更に、リスケールされた前記変調されたデジタル信号に基づいて、アナログ変調信号を発生し、発生した前記アナログ変調信号に基づいて、前記感知ループ組立体を制御するように構成される、システム。
【請求項1】
振動誤差の抑制を行う方法であって、
変調された光信号を、感知ループ組立体から光検出器で受け取るステップと、
受け取った前記光信号を、変調されたアナログ信号に生成するステップと、
生成した前記アナログ信号を、変調されたデジタル信号へと変換するステップと、
前記変調された前記デジタル信号の強度変調を求めるステップと、
前記強度変調の振幅を求めるステップと、
決定された前記強度変調の振幅に基づいて、前記変調されたデジタル位相信号をリスケールするステップと
を備える方法。
【請求項2】
請求項1に記載の方法であって、リスケールされた前記変調されたデジタル信号に基づいて、アナログ変調信号を生成するステップと、生成された前記アナログ変調信号に基づいて、前記感知ループ組立体を制御するステップとを更に備える方法。
【請求項3】
振動誤差の抑制を行うシステムであって、
光信号を発生するように構成された光源と、
発生された前記光信号を、変調するため、および光ファイバ・コイル内で、互いに反対となる方向へ伝達するように構成された感知ループ組立体と、
前記感知ループ組立体の出力である変調された光信号を受け取り、アナログ信号を発生するように構成された光検出器と、
発生された前記アナログ信号を、変調されたデジタル信号へと変換し、前記変調されたデジタル信号の強度変調を求め、前記強度変調の振幅を求め、求められた前記強度変調の振幅に基づいて、前記変調されたデジタル信号をリスケールするように構成された処理コンポーネントと
を備えるシステム。
【請求項4】
請求項3に記載のシステムであって、前記処理コンポーネントが更に、リスケールされた前記変調されたデジタル信号に基づいて、アナログ変調信号を発生し、発生した前記アナログ変調信号に基づいて、前記感知ループ組立体を制御するように構成される、システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−216256(P2008−216256A)
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2008−56293(P2008−56293)
【出願日】平成20年3月6日(2008.3.6)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願番号】特願2008−56293(P2008−56293)
【出願日】平成20年3月6日(2008.3.6)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]