
光ファイバージャイロスコープにおける放射及び振動の不感度性のためのデジタル復調強度抑制と組み合わせた光源電流サーボ機構を用いる一定光パワーセンサー
【課題】光ファイバージャイロスコープにおける改良された光パワー制御システム及び光パワー制御方法を提供する
【解決手段】光ファイバージャイロスコープのためのシステム及び方法が提供される。1つの実施の形態では、光ファイバージャイロスコープは、光学経路を通って光を送信する光源に結合された光源電流サーボ機であって、該光源を作動させる電流を供給する光源電流ドライブを介して、光学経路を通る光の強度を制御する、光源電流サーボ機構と、光検出器を介して光学経路に結合された強度制御信号プロセッサであって、該強度制御信号プロセッサは、光源電流サーボ機構に強度制御信号を出力し、該強度制御信号は、光検出器で受信された光の強度の関数である、強度制御信号プロセッサとを備え、光源電流サーボ機構は、強度制御信号を安定したアナログ電圧基準と比較して、光源電流ドライブを調整し、光検出器における光パワーを一定のレベルに向けて駆動する。
【解決手段】光ファイバージャイロスコープのためのシステム及び方法が提供される。1つの実施の形態では、光ファイバージャイロスコープは、光学経路を通って光を送信する光源に結合された光源電流サーボ機であって、該光源を作動させる電流を供給する光源電流ドライブを介して、光学経路を通る光の強度を制御する、光源電流サーボ機構と、光検出器を介して光学経路に結合された強度制御信号プロセッサであって、該強度制御信号プロセッサは、光源電流サーボ機構に強度制御信号を出力し、該強度制御信号は、光検出器で受信された光の強度の関数である、強度制御信号プロセッサとを備え、光源電流サーボ機構は、強度制御信号を安定したアナログ電圧基準と比較して、光源電流ドライブを調整し、光検出器における光パワーを一定のレベルに向けて駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ファイバージャイロスコープにおける放射及び振動の不感度性のためのデジタル復調強度抑制と組み合わせた光源電流サーボ機構を用いる一定光パワーセンサーに関する。
【0002】
[関連出願の相互参照]
本願は以下の米国特許出願に関連し、これらの米国特許出願はそれぞれ、その全内容が参照により本明細書に援用される:
米国特許第5,465,149号として1995年11月7日に発行された米国特許出願第08/209,510号、
米国特許第5,812,263号として1998年9月22日に発行された米国特許出願第08/77,092号、
米国特許第7,333,209号として2007年5月10日に発行された米国特許出願第11/271,994号、
米国特許第6,765,678号として2004年7月20日に発行された米国特許出願第10/041,192号、
米国特許第7,038,783号として2006年5月2日に発行された米国特許出願第10/443,958号、
米国特許出願公開第2008/0079946号として2008年4月3日に公開された米国特許出願第11/529,967号、及び
米国特許第5,469,257号として1995年11月21日に発行された米国特許出願第08/158,116号。
【背景技術】
【0003】
光ファイバージャイロスコープ(FOG)は、回転軸を中心とした回転速度又は角速度の変化を測定するのに用いられてきた。基本的な従来の光ファイバージャイロスコープ(FOG)は、光源、ビーム分割デバイス、光ファイバーのコイル、及びシステム光検出器を備える。ビーム分割デバイスは、光源からの光を、コイルを対向伝播方向に伝播して最終的には光検出器で集束する別々のビームに分割する。コイルの回転速度は、例えばサニャック効果によって引き起こされる干渉等、光検出器での受信された光の光学特性に基づいて求めることができる。或る特定の用途では、FOGの性能要件を満たすために、対象とする光学特性には、光検出器で受信される光パワーがほんの僅かのみであることが必要とされる。電力消費及び加熱効果を低減するだけでなく、低光パワーで動作することで、非直線光学効果によるバイアス不安定性が低減される。しかしながら、FOGの寿命を超えると、光回路はより多くの光損失を生み出し、これは、光源によって生成されて光検出器に実際に到達する光パワーがより少なくなることを意味する。光検出器で受信される光が少なくなるにつれて、センサーは、回転に対する感度がより低くなり、回転の信号対雑音比の低減を示す。光ビームが寿命の初めに低光パワーでのみ送信されて、非直線光学誤差が軽減されると、センサーが性能要件をもはや満たすことできなくなる前の光回路の経時変化を考慮するのに、比較的小さなマージンが利用可能である。
【0004】
この問題の1つの可能性のある解決策は、デジタル電子機器を用い、光回路の損失が多くなると、場合によっては光源の光パワー出力を増加させて、光検出器で受信される光パワーレベルを比較的一定に維持することである。今日、FOGの技術分野で実用化されているように、光源は、該光源の光パワー出力が実用可能な限り一定となるように非常に安定したパワー基準を用いて駆動され、これは、その結果として光検出器で受信されるパワーレベルが安定したものとならなくても行われる。この理由は、光源の光パワーの変動がFOG内のスケールファクターのシフト等の誤差を生み出す可能性があるからである。同様に、光パワーに有限ステップの調整を導入して光回路の経時変化に対処することも、許容できないスケールファクター誤差をジャイロスコープ内に生成するおそれがある。例えば、比較的一般的なデジタル/アナログ変換器(DAC)(例えば12ビット分解能を有する)を用いてフィードバック信号を生成し光源を制御する場合、その結果ジャイロスコープ内で生み出されるステップ誤差は、多くの用途にとって耐えられないものとなる。より高い分解能のDACを使用することができるが、そのようなデバイスは、それに対応してより大きなフットプリント及びパワーを必要とし、より多くの熱を発生させる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した理由、及び本明細書を読んで理解することで当業者には明らかになる後述する他の理由により、この技術分野では、光ファイバージャイロスコープにおける改良された光パワー制御システム及び光パワー制御方法が必要とされる。
【課題を解決するための手段】
【0006】
本発明の実施の形態は、光ファイバージャイロスコープにおける光パワー制御方法及び光パワー制御システムを提供し、以下の明細書を読んで検討することによって理解されることになる。
【0007】
1つの実施の形態では、光ファイバージャイロスコープが、光学経路を通って光を送信するジャイロスコープ光源に結合された光源電流サーボ機であって、前記ジャイロスコープ光源を作動させる電流を供給する光源電流ドライブを介して、前記光学経路を通る前記光の強度を制御する、光源電流サーボ機構と、光検出器を介して前記光学経路に結合された強度制御信号プロセッサであって、該強度制御信号プロセッサは、前記光源電流サーボ機構に強度制御信号を出力し、該強度制御信号は、前記光検出器で受信された前記光の強度の関数である、強度制御信号プロセッサと、を備え、前記光源電流サーボ機構は、前記強度制御信号を安定したアナログ電圧基準と比較して、前記光源電流ドライブを調整し、前記光検出器における光パワーを一定の光パワーレベルに向けて駆動する。
【0008】
これらの特徴、態様、及び利点、並びに他の特徴、態様、及び利点は、以下の説明、添付の特許請求の範囲、及び添付図面についてより良く理解される。
【図面の簡単な説明】
【0009】
【図1】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図2】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図3】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図4A】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図4B】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図5】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図6】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図7】本発明の1つの実施形態の方法の実施形態の一実施形態のフロー図である。
【発明を実施するための形態】
【0010】
一般的な慣行に従い、説明するさまざまな特徴は、一律の縮尺で描かれておらず、本発明に関連する特徴を強調するように描かれている。同様の参照符号は、図及び本文の全体にわたり同様の要素を示している。
【0011】
以下の説明では、本説明の一部をなす添付図面が参照される。添付図面には、本発明を実施することができる特定の例示の実施形態として本発明が示されている。これらの実施形態は、当業者が本発明を実施することができるように十分詳細に説明され、他の実施形態を利用することができること、並びに本発明の範囲から逸脱することなく、論理的な変更、機械的な変更、電気的な変更、及び方法の変更を行えることを理解すべきである。したがって、以下の詳細な説明は、限定の意味に解釈すべきではない。また、この明細書のさまざまな部分は、切り離して読むことを意図しているのではなく、記載された説明の教示とともに全体として考慮することを意図している。
【0012】
本発明の実施形態は、光源電流サーボ機構(light source current servo)を用いて、光検出器において一定の光パワーを配信する光ファイバージャイロスコープを提供する。代替的な実施形態は、低帯域幅/低雑音の光源電流サーボ機構を高帯域幅オフセット制御又はDCセンタリング(centering)機構と組み合わせて、放射及び振動の感度を抑制することを更に提供する。本発明の実施形態は、回転速度信号の同期復調又は非同期復調のいずれかと共に用いることができる。
【0013】
以下でより詳細に説明されるように、本明細書で説明する光源電流サーボ機構は、長時間の定数を有しかつ急峻なステップもグリッチもヒステリシスも雑音もないサーボループを通じて光源電流を緩やかにかつ滑らかに調整することを提供する。これを提供することによって、回転信号対雑音比を一定に保つと同時に、非直線光学誤差を最小にすることが可能になるという利益が得られる。以下に提示する代替的な実施形態は、1)光源電流を調整するのにアナログ電圧を用い;2)低速(slow)D/A変換器及び超低帯域幅サーボループを用いて光源電流を調整するデジタルワードを生成するのにフィールドプログラマブルゲートアレイ(FPGA)、マイクロプロセッサ、又は特定用途向け集積回路(ASIC)等の電子機器を用い;かつ3)D/A変換器、及び超低帯域幅ループに加えてこれらの前に、光源電流を調整するデルタシグマ手法(delta sigma approach)を用いて、サーボ機構を動作させる。
【0014】
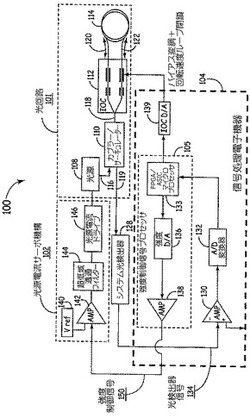
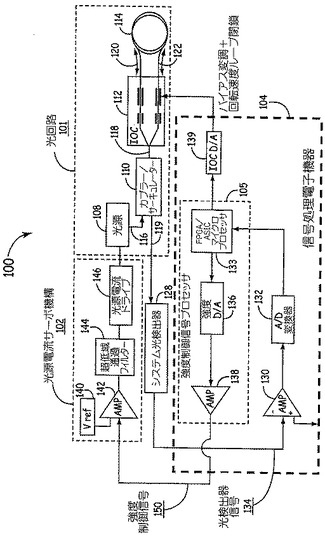
図1は、本発明の1つの実施形態のFOG100の簡略化した概略図である。FOG100は、システム光検出器で受信される一定の光パワーで動作する。一定パワーの動作は、強度デジタル/アナログ変換器及び強度制御信号処理回路部によって駆動される強度サーボ機構及び光源電流制御サーボ機構によって維持される。従来のFOGの構成及び動作はよく知られており、したがって、綿密には論じないことにする。FOGを論じた代表的なものは、1995年11月7日にStrandjord他に対して発行された米国特許第5,465,149号に見ることができる。この米国特許は参照により本明細書に援用される。
【0015】
図1に示すように、FOG100は、光源108、ファイバーカプラー又はサーキュレーター110(本明細書では光デバイス110と総称する)、本明細書で光集積チップ(IOC)112と呼ぶ多機能処理チップ、及び光ファイバーコイル114を備える。これらは全て、光ファイバー部分116、118、120、及び122によってさまざまに接続される。1つの実施形態では、検知される回転の中心の軸の周囲に巻き付けられたシングルモード光ファイバーを用いて、コイル状光ファイバーが、コア又はスプールの周囲にファイバーコイル114を形成する。
【0016】
光源108は、FOG100内に電磁波を伝播させる広帯域光源を備える。1つの実施形態では、光源108は、スペクトルの赤外線部分又は光学的部分で電磁波を提供する半導体スーパールミネセントダイオード又は希土類ドープファイバー光源である。一般的には、光源108は、ファイバーコイル114内の散乱場所におけるレイリー散乱及びフレネル散乱に起因したこれらの波の間の位相シフト差の誤差を低減するために、放射光について短いコヒーレンス長を有する。
【0017】
システム光検出器128は、光ファイバー部分119から該システム光検出器に衝突する電磁波、すなわち光波を検出し、更には、カプラー110からの戻り結合光ビームを受信する。システム光検出器128は、受信した光波に応じた電流を生成する。
【0018】
動作中、光源108は、光ファイバー116を介して広帯域光波をカプラー又はサーキュレーター110に送信する。サーキュレーター又はカプラー110は、光源からの光をIOC112に送信し、IOC112から戻る光をシステム光検出器128に送信する。いくつかの実施形態では、以下で図5において論じるように、カプラー110は、相対強度雑音(RIN)を低減するため、光源出力の一部分を別個の光検出器に誘導することができる。
【0019】
IOC112に送信された光は、2つの光波124、126に更に分割され、これらの光波は、1つの実施形態では、本明細書に参照により援用される米国特許第5、465,149号に説明されているように位相変調される。2つの光波124、126は、光ファイバー120、122を介してファイバーコイル114に送信される。光波124はファイバーコイル114の長さを時計回りに伝播する。同様に、光波126はファイバーコイル114の長さを反時計回りに伝播する。ファイバーコイル114から送信されIOC112に戻った後、2つの戻り光波124、126は結合され、次いで、カプラー110に提供される。カプラーは、結合された光波をシステム光検出器128に送信し、システム光検出器128は、電流信号134を信号処理電子機器104に供給する。コイル114の回転速度は、サニャック効果によって引き起こされた干渉から、光検出器128で受信された光の光学特性に基づいて信号処理電子機器104により求められる。
【0020】
図1の実施形態では、システム光検出器128への一定の光パワーは、光源電流サーボ機構102及び強度制御信号プロセッサ105を用いることによって維持される。強度制御信号プロセッサ105は、プロセッサ133(デジタル復調機能及び累算機能を含むフィールドプログラマブルゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、及び/又はマイクロプロセッサ等の技術を用いて実施することができる)並びに強度D/A変換器136及び増幅器138を備える。光源電流サーボ機構102及び強度制御信号プロセッサ105の組み合わされた動作によって、FOG100は、該FOG100の寿命全体を通して、システム光検出器128において一定の光パワーを維持するのに十分な光パワーでの動作を維持することが可能になる。また、システム光検出器で受信された光の強度によって変動しないDC電圧オフセットを有する強度制御信号も生成される。プロセッサ133は、IOC112がコイル114内を進む対向伝播光ビームを位相変調するのに用いるバイアス変調信号を提供するために、IOC D/A変換器139に出力を更に提供する。
【0021】
図1に示すように、システム光検出器128からの信号134は、信号処理電子機器105によって受信されると、信号処理電子機器104内において、まず増幅され(130)、次いでA/D変換器132によってデジタル化される。次に、このデジタル化された信号は、強度D/A変換器136に指令するデジタル強度制御ワードを計算するためにプロセッサ133に供給される。強度D/A変換器136の出力は、増幅され(138)、光源電流サーボ機構102に供給される。
【0022】
図1に示す実施形態では、光源電流サーボ機構102は、安定したアナログ基準電圧140、比較増幅器142、超低域通過フィルター144(例えば、タウ=ほぼ1msec〜数時間の時定数を有する)、及び光源電流ドライブ146を備える。
【0023】
光源電流サーボ機構102は、出力された強度制御信号150を受信するように機能し、この信号を、システム光検出器128における目標光パワー又は公称光パワーを表す安定したアナログ基準電圧140と比較する。実際の強度D/A変換器136の出力と目標値との間のずれはゼロ(null)にサーボ制御される。光源電流増幅器142の出力は、大きく低域通過フィルタリングされて(144)、光パワーの量子化雑音等の短期ジッターが最小にされる。このフィルタリングされた出力は、光損失の変化に応じてFOG100の寿命にわたり緩やかに変動することになる。この出力は、光源電流ドライブ146に供給されて、光源108を駆動し、それによって、寿命にわたって目標値又は公称値にロックされたシステム光検出器128の光パワーを維持する。この実施形態の例では、フィルター144は超低帯域幅フィルターである。しかしながら、代替的な実施形態では、以下でより詳細に説明するように、フィルタリングは、当該技術分野で知られている代替的なフィルターによって達成することもできるし、微細な強度制御/フィルタリングのデルタシグマ手法を増強して達成することも、デルタシグマ手法に代わるものによって達成することもできることが理解される。
【0024】
FOG100は、このようにして、ステップ誤差又は影響のある量子化雑音を導入することなく、システム光検出器128における一定の光パワーを維持するために、電流源を緩やかにかつ連続的に変動させる能力をもたらす。システム光検出器128において一定の光パワーを提供する能力によって、システムは、FOG100内の光学部品のいずれについても、その光学部品での光の損失を考慮することが可能になる。システム光検出器における光パワーのこの不変性は、センサーの信号対雑音比を、意図した設計値に安定化させる役割を果たす。第2の利益は、安定した光パワーによって、回転感度すなわちスケールファクターがシステム光検出器における光パワーに正比例するいわゆるオープンレートループ(open rate-loop)FOG等のいくつかのFOG構成におけるスケールファクター不安定性が除去されることである。また、FOG100を低光パワー(すなわち、光検出器128において許容可能な光信号対雑音比を発揮するのに十分であるが、光パワーに比例した非直線誤差を最小にするように十分低い)で動作させる能力によって、これらの非直線光学効果に起因したバイアス不安定性が低減する。最後に、光源電流サーボ機構102は、低帯域幅を有する静穏なシステムを創出し、光パワーに対する突然の調整によって導入されるステップ誤差を回避する。
【0025】
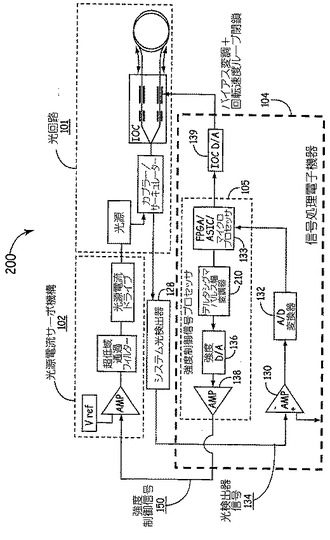
図2は、105で示す強度制御信号プロセッサが、任意選択のデルタシグマパルス幅変調器210(デルタシグマ回路とも呼ぶ)を更に備えることを除いては、図1のFOG100と同じ構成を有するFOG200の代替的な実施形態の概略図である。デルタシグマパルス幅変調器210では、雑音(シグマデルタパルス幅変調によって生成される)が、強度D/A変換器信号に加えられて、量子化雑音が低減される。この代替的な実施形態では、デルタシグマパルス幅変調器210は、強度D/Aデジタル制御ワードの最下位ビットを高速にディザリング(パルス幅変調)することによって強度D/A変換器136の量子化雑音を有効に低減する。このようにして、デルタシグマ変調器410は、強度制御信号プロセッサ105及び光源電流サーボ機構102によって提供される強度サーボ機構制御ループにおいて量子化雑音を劇的に低減する。図4A及び4Bについて以下で論じられるデルタシグマパルス幅変調に関する更に詳細な内容は、図2のデルタシグマパルス幅変調器210に適用可能である。
【0026】
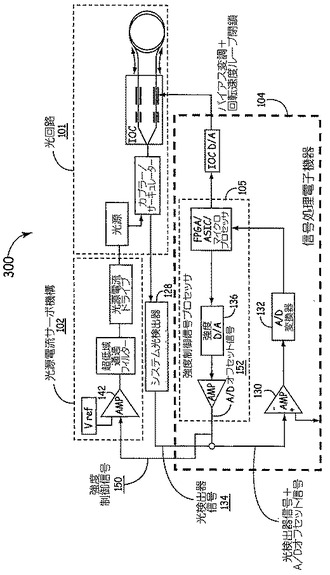
図3は、強度制御サーボ機構をFOG100内の他の機能と容易かつ相乗効果的に組み合わせることができることを示している。例えば、図3は、光パワー制御がA/Dオフセット信号制御と組み合わされているFOG300の一実施形態を示している。A/Dオフセット信号制御の詳細な説明は、1998年9月22日にMorganに対して発行された米国特許第5,812,263号に見ることができる。この米国特許は参照により本明細書に援用される。手短に言えば、A/Dオフセット信号制御は、システム光検出器信号134が、増幅器130を通過した後、A/D変換器132の有限の電圧範囲においてセンタリングされて該A/D変換器に到達することを保証する手段である。そのようなセンタリングによって、A/D変換器132の飽和(その結果、FOG機能が著しく失われる)が防止されるだけでなく、回転信号対雑音比を最大にするために、増幅器130において最大利得を適用することも可能になる。そのようなA/D信号センタリングは、放射又は機械的衝撃等の事象が比較的急速なステップ関数変化を、光パワー、したがってA/D入力電圧に生成する場合がある荒れた外部環境でA/D飽和を防止するのに重要である。光強度制御をA/Dセンタリングと組み合わせることによって、FOGは、緩やかに変動する非直線光学誤差を(新たな雑音を導入することなく)軽減することが可能になり、同時に、放射事象又は衝撃事象(光強度制御にとってはるかに高速すぎて軽減することができない)の中にあっても、A/Dをセンタリングされた状態に保つことが可能になる。また、A/D信号センタリングによって、当業者に理解されるように、A/D変換器自体の有限積分非直線性又は有限微分非直線性に起因したジャイロスコープ性能誤差が最小にされる。
【0027】
図3が示すように、A/Dセンタリング信号152及び強度制御信号150は、単一のD/A変換器136を用いて都合よく生成することができる。増幅器142及び130の相対帯域幅は、2つのループのための対象となる時間スケールを決定する。すなわち、A/Dセンタリング機能は、A/D変換器132の入力における数百Hzの帯域幅を有する急速な変化をゼロにするように設計することができる一方、光源電流サーボ機構102は、同時に、非直線光学誤差に起因した時間ごと又は日ごとのバイアスドリフトを最小にすることができる。この組み合わせによって、急速な環境の影響がA/D変換器132を飽和させることを防止する利益、A/D変換器132の非直線性誤差を最小にする利益、及び緩やかに変動する非直線光学誤差の影響をサーボ制御で除去する利益が同時に提供される。
【0028】
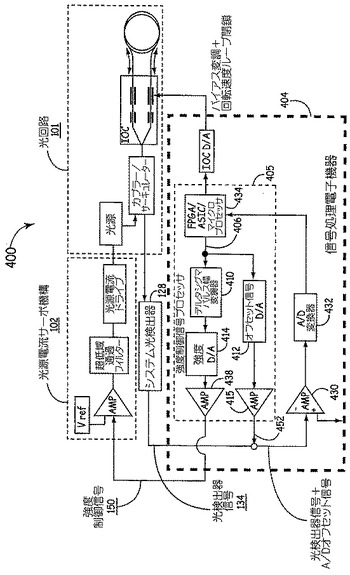
図4Aは、光パワー制御における量子化雑音を最小にする高帯域幅A/Dセンタリング及びデルタシグマパルス幅変調の双方の利益を提供するFOG400の1つの実施形態を示している。
【0029】
FOG400は、図1〜図3で説明したような光源電流サーボ機構102及び光回路101を備える。FOG400は信号処理電子機器404を更に含む。信号処理電子機器404は、上述した増幅器130、A/D変換器132、及びプロセッサ133について説明したように動作する第1の増幅器430、A/D変換器432、及びプロセッサ434を備える。FOG100と異なり、この実施形態では、強度制御信号プロセッサ405は2つの別個のD/A変換器を備え、一方(412で示す)は、A/Dセンタリングを維持するためのものであり、第2のもの(414で示す)は、通常ならば非直線光学誤差を生成する緩やかな光パワードリフトをゼロにするためのものである。
【0030】
強度制御D/A変換器414は、オフセット信号D/A変換器412から独立しており、デルタシグマパルス幅変調器410にデジタルで供給される信号406に依拠している。信号406は、デルタシグマパルス幅変調器410(デルタシグマ回路とも呼ぶ)に提供され、最終的に、図3の強度D/A変換器DAC136と酷似した強度D/A変換器414に出力信号411を供給し、信号406がアナログ領域に変換され、強度制御信号150が光源電流サーボ機構102に提供される。
【0031】
その間、オフセット信号D/A変換器412は、信号406に依拠してA/Dセンタリング信号452を生成する。A/Dセンタリング信号452は、増幅され(415)、システム光検出器信号134と合計され、増幅器430を通って戻され、信号処理電子機器404を駆動する。上述したように、A/Dオフセット信号制御は、システム光検出器信号134が、増幅器430を通過した後、A/D変換器432の有限の電圧範囲においてセンタリングされて該A/D変換器に到達することを保証する手段である。そのようなA/D信号センタリングによって、当業者に理解されるように、A/D変換器432の飽和が(動的な振動状態、衝撃状態、及び放射状態のもとであって)防止され、A/D変換器自体の有限積分非直線性又は有限微分非直線性に起因したFOG400性能誤差も最小になる。
【0032】
図4Aの実施形態の例はさまざまな利点を有する。まず、独立した強度DAC414を利用することによって、光源電流サーボ機構102は、オフセット信号D/Aループの出力452に潜在的に影響を及ぼす可能性のある外部環境の大きな変化が回路内に存在すると仮定しても、その変化から防護される。したがって、光源電流サーボ機構102によって作成される外側ループは、より低コストの構成要素及びより低いフィルタリング能力で動作することができるが、それでも、ループ452からの可能性のある雑音が機能に影響を及ぼすことが防止される。この場合に、明確にするために、2つの別個のD/A変換器が示されているが(すなわち、一方はオフセット制御機能のためのものであり、もう一方はデルタシグマ変調を用いた強度制御のためのものである)、いくつかの実施形態では、双方の機能を単一のD/A変換器を用いて実行することが可能である。
【0033】
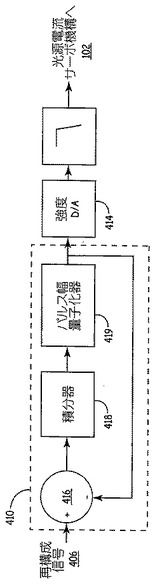
図4Bは、デルタシグマパルス幅変調器410の一実施形態の概略図である。デルタシグマパルス幅変調器410は、光パワーの高精度デジタル表現である信号406を受信し、強度D/A変換器414のバランスされた高周波数パルス幅変調を(ジャイロ雑音感度をかなり上回る周波数で)用いて、D/A変換器414がこのディザリングなしで可能である分解能よりも高い分解能を有する平均アナログ値を生成する。強度D/A変換器414によって表されるこの出力は、次に、光源電流サーボ機構102に提供され、光源電流サーボ機構102において、高精度電圧基準140と比較される。光源電流サーボ機構102によって提供される光源電流の初期値は、ユーザー又は代替的な機能回路によってプログラム可能とすることができ、動作時又は動作前の或る時に求めることができる。デルタシグマパルス幅変調器410は、信号406を用い、積分フィードバックループ(加算器416、積分器418、及びパルス幅量子化器419を備える)及び超低帯域幅サーボ機構102を介して平均出力をサーボ制御して積分誤差を除去する。すなわち、信号406の有限の量子化ステップは、信号406の下位ビットをディザリングし、次いでループ帯域幅フィルターを有する増幅器418において積分することにより平均される。
【0034】
図4A及び図4Bのデルタシグマ手法も種々の利点を有する。まず、変調器410のデルタシグマ回路部は、図3の実施形態と酷似し、信号処理電子機器404内においてオフセット信号D/Aループから独立しており、したがって、その比較的高帯域幅のループ内で生成される雑音により影響を大きく受けない。さらに、デルタシグマ手法は、雑音成分が十分にフィルタリングされた十分小さなポンプ電流ステップ変化によって強度制御信号150を動作させることを可能にする。したがって、図4A及び図4Bのデルタシグマ手法によって、光源電流サーボ機構102は、低コストで性能が低めの構成要素を用いても、高い電流制御性能を発揮することが可能になる。
【0035】
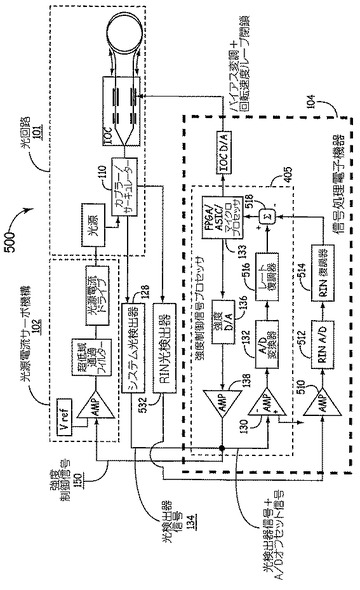
図5に示す更に別の実施形態では、光源電流サーボ機構102によって達成される光パワーの制御をFOG100内の更に他の機能と組み合わせることができる。例えば、図5は、図3で具体的に説明した光パワー制御が信号処理電子機器104内の追加の回路部と組み合わされて相対強度雑音(RIN)の影響を低減する一実施形態(包括的に500)を示している。RINは、当業者によく知られているように、多くの場合、FOG内の支配的な回転速度測定雑音源である。1995年11月21日にBlake他に対して発行された米国特許第5,469,257号、及び2004年7月20日に発行された米国特許第6,765,678号は、ともに参照により本明細書に援用されるが、FOG雑音に対するRINの影響を低減する方法を記載している。図5は、カプラー/サーキュレーター110に結合された第2の光検出器532(RIN光検出器532と呼ぶ)が光源108で生成された相対強度雑音を検知する一実施形態を伝えている。この雑音は、システム光検出器128に雑音を有するコモンモードであり、したがって、2つの光検出器信号を減算すると、その結果、システム光検出器信号は、RINの多くが除去される。この減算手法は、双方の光検出器におけるDC光パワーの正確な知識及び/又は正規化に依拠する。図5の実施形態では、信号処理電子機器104は、RIN増幅器510、RIN A/D変換器512、及びRIN復調ブロック514を更に備える。RIN増幅器510は、RIN光検出器532からの出力を受信し、RIN検出器の光パワーは、RIN復調ブロック514の出力から求めることができる。RIN光検出器532からの出力とレート復調器516からの出力(システム光検出器信号134から生成される)との間の差分(518で取られる)がプロセッサ133に提供される。次に、システム検出器パワーは、プロセッサ133によって強度D/A変換器136に提供される強度D/A制御ワードから求めることができる。
【0036】
上記で論じた実施形態は、光コイルから出る光から測定される光パワーを安定化させるためにシステム光検出器を利用して説明されているが、本発明の範囲内の他の実施形態は、代替的に、例えば非直線光学効果をコイルの入口近くで補正するために、コイルに入る光パワーを安定化させることができる。当業者ならば、この明細書を検討すると、これは、光ビームの分割の前に、コイルに向かって進む光ビームの光パワーを監視する光検出器を(例えばカプラーを介して)利用することにより達成することができることを理解するであろう。RIN光検出器は、この光パワーを測定することができる一例である。
【0037】
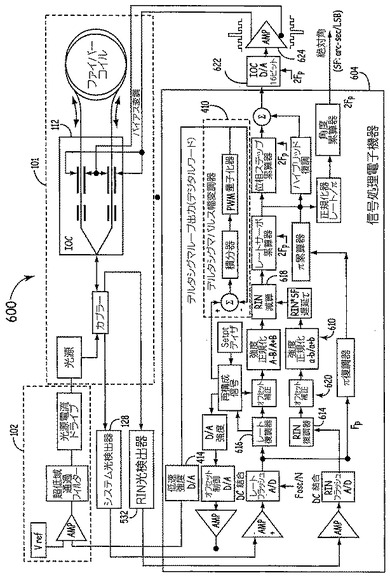
図6は、光源電流サーボ機構102による光回路101の光パワー制御が、RIN減算及び別の有益な機能、すなわちデジタル強度正規化と組み合わされて、kHzの周波数まで、さらには数十kHzの周波数までの振動からの急速な強度変調の影響を抑制する1つの詳細な実施形態(600)を示している。デジタル強度正規化は、このように、光強度制御よりもはるかに高く、A/Dセンタリングよりも更に高い、非常に高い帯域幅で行われる。したがって、光強度制御、A/Dセンタリング、及びデジタル強度正規化を組み合わせることによって、図6の実施形態は、誤差を除去することができるこれまでよりも広い範囲の周波数/時間スケールをカバーする。
【0038】
信号処理電子機器604内では、デジタル強度正規化は、図6に見られるような正規化回路610によって実施される。デジタル正規化の概念は、2008年4月3日に公開されたGreeningに対する米国特許出願公開第2008/0,079,946号に記載されている。この米国特許出願は参照により本明細書に援用される。図6の実施形態では、レート復調回路616及びRIN復調器(Demod)614の出力信号がともに、618における減算の前に、610において正規化される。この正規化によって、光源電流サーボ機構102による光パワーの緩やかな調整がRIN減算の効力を低減しないことが保証される。また、低帯域幅の光パワー制御を、それよりも高い帯域幅のA/Dオフセットセンタリング(620で包括的に示す)及び超高帯域幅の強度正規化と組み合わせることによって、サブHzから数十kHzのダイナミックレンジにわたるジャイロスコープ誤差メカニズムを抑制することが可能であることを理解することができる。
【0039】
代替的な実施形態では、レート復調回路616は、システムのニーズに応じて、同期設計又は非同期設計とすることができることに留意されたい。同期復調設計及び非同期復調設計の詳細な内容は、2007年5月10日にGreening他に対して発行された米国特許第7,333,209号で論じられている。この米国特許は参照により本明細書に援用され。本発明の実施形態によって提供される光パワー制御は、同期復調及び非同期復調の双方と適合している。1つの実施形態では、相対強度雑音低減回転速度信号は、光路を進む光の変調を駆動する誤差抑制変調信号を生成するのに用いられる。また、1つの実施形態では、電子機器604のデジタル/アナログ変換器ループが結合されて、システム光検出器128からの電気信号134を受信し、システム光検出器128で受信された光の強度によって変動しないDC電圧オフセットを有する強度制御信号150を出力する。図6に示すように、信号処理電子機器604はデジタル制御信号を出力する。このデジタル制御信号は、アナログに変換され(622)、増幅されて(624)、IOC112において光ビームの変調を駆動するバイアス変調信号を生成する。
【0040】
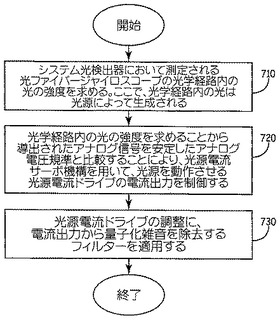
図7は、本発明の1つの実施形態の方法の一実施形態のフロー図である。この方法は、710から開始し、システム光検出器において測定される光ファイバージャイロスコープの光学経路内の光の強度を求める。ここで、光学経路内の光は光源によって生成される。この方法は、720に進み、例えばシステム光検出器において光学経路内の光の強度から導出されたアナログ信号を安定したアナログ電圧基準と比較することにより、光源電流サーボ機構を用いて、光源を動作させる光源電流ドライブの電流出力を制御する。
【0041】
この方法は730に進み、光源電流ドライブの調整に、電流出力から量子化雑音を除去するフィルターを適用する。1つの実施形態では、光源電流ドライブの調整にフィルターを適用することは、光源電流ドライブを制御する信号に超低帯域幅フィルターを適用することを含む。長時間一定(例えば、ほぼ数秒〜数時間)を有する光源電流サーボ機構を利用することによって、光源電流は、急峻なステップもグリッチもヒステリシスもなく緩やかにかつ滑らかに調整される。別の実施形態では、フィルターを適用することは、雑音スペクトルをデジタルループ出力信号から積分消去するデルタシグマ積分フィードバックループを用いて、デジタルループ出力信号を処理することを含む。他の実施形態では、当業者がこの明細書を読めば理解するように、他の形態のフィルタリングを適用することもできるし、組み合わせることもできる。
【0042】
図7に提示する方法の1つの実施形態では、光源電流サーボ機構は、1組の信号処理電子機器内で強度D/A変換器から出力信号を受信するように機能し、その信号をフィルタリングして、影響のある量子化雑音なしでジャイロスコープの光源を駆動する光源電流を達成する。このフィルタリングされた出力は、FOGの寿命にわたって緩やかに変動し、光源電流ドライブに供給されて光源を駆動する。また、A/Dセンタリング制御ループ及びデジタル強度正規化回路を含む信号処理電子機器によって、FOGは外力に対する不感度性を獲得する。
【0043】
この説明は、例示の目的で提示され、網羅的であることを意図するものでもなければ、開示した実施形態に限定することを意図するものでもない。この後に続く特許請求の範囲の範囲内に含まれる変形及び変更を行うことができる。例えば、上述した実施形態は、FOGに関するものであるが、FOGの任意の変形又は種類が、説明した発明を利用することができるが理解される。さらに、後述する構成要素のいくつかは、デジタル回路部若しくはアナログ回路部、又は双方の組み合わせのいずれかを用いて実施することができ、適宜、適した処理回路部及びマシン可読ストレージ媒体で実行されるソフトウェアを通じて実現することができる。
【0044】
いくつかの手段が、この明細書で論じたような本発明のシステム及び方法を実施するのに利用可能である。これらの手段には、デジタルコンピューターシステム、マイクロプロセッサ、特定用途向け集積回路(ASIC)、汎用コンピューター、プログラマブルコントローラー、及びフィールドプログラマブルゲートアレイ(FPGA)が含まれるが、これらに限定されるものではない。これらの全ては、本明細書では「プロセッサ」と総称することがある。例えば、1つの実施形態では、信号処理は、FPGA又はASICによって組み込むこともできるし、代替的に、組込みプロセッサ又はディスクリートプロセッサによって組み込むこともできる。したがって、本発明の他の実施形態は、そのような手段によって実施されると、本発明の実施形態を実施することが可能になる、コンピューター可読媒体上に存在するプログラム命令である。コンピューター可読媒体には、任意の形態の物理的なコンピューターメモリデバイスが含まれる。そのような物理的なコンピューターメモリデバイスの例には、パンチカード、磁気ディスク若しくは磁気テープ、光データストレージシステム、フラッシュ読出専用メモリ(ROM)、不揮発性ROM、プログラマブルROM(PROM)、消去可能プログラマブルROM(E−PROM)、ランダムアクセスメモリ(RAM)、又は他の任意の形態の永久的、半永久的、若しくは一時的なメモリストレージシステム若しくはデバイスが含まれるが、これらに限定されるものではない。プログラム命令には、コンピューターシステムプロセッサ及び超高速集積回路(VHSIC)ハードウェア記述言語(VHDL)等のハードウェア記述言語によって実行されるコンピューター実行可能命令が含まれるが、これに限定されるものではない。
【0045】
特定の実施形態を本明細書で図示及び説明してきたが、示した特定の実施形態の代わりに同じ目的を達成するように適合された任意の装置を用いることができることが、当業者によって理解されよう。本願は、本発明の任意の適合形態又は変形形態を包含することを意図している。したがって、本発明が特許請求の範囲及びその均等物によってのみ限定されることが意図されているのは明白である。
【技術分野】
【0001】
本発明は、光ファイバージャイロスコープにおける放射及び振動の不感度性のためのデジタル復調強度抑制と組み合わせた光源電流サーボ機構を用いる一定光パワーセンサーに関する。
【0002】
[関連出願の相互参照]
本願は以下の米国特許出願に関連し、これらの米国特許出願はそれぞれ、その全内容が参照により本明細書に援用される:
米国特許第5,465,149号として1995年11月7日に発行された米国特許出願第08/209,510号、
米国特許第5,812,263号として1998年9月22日に発行された米国特許出願第08/77,092号、
米国特許第7,333,209号として2007年5月10日に発行された米国特許出願第11/271,994号、
米国特許第6,765,678号として2004年7月20日に発行された米国特許出願第10/041,192号、
米国特許第7,038,783号として2006年5月2日に発行された米国特許出願第10/443,958号、
米国特許出願公開第2008/0079946号として2008年4月3日に公開された米国特許出願第11/529,967号、及び
米国特許第5,469,257号として1995年11月21日に発行された米国特許出願第08/158,116号。
【背景技術】
【0003】
光ファイバージャイロスコープ(FOG)は、回転軸を中心とした回転速度又は角速度の変化を測定するのに用いられてきた。基本的な従来の光ファイバージャイロスコープ(FOG)は、光源、ビーム分割デバイス、光ファイバーのコイル、及びシステム光検出器を備える。ビーム分割デバイスは、光源からの光を、コイルを対向伝播方向に伝播して最終的には光検出器で集束する別々のビームに分割する。コイルの回転速度は、例えばサニャック効果によって引き起こされる干渉等、光検出器での受信された光の光学特性に基づいて求めることができる。或る特定の用途では、FOGの性能要件を満たすために、対象とする光学特性には、光検出器で受信される光パワーがほんの僅かのみであることが必要とされる。電力消費及び加熱効果を低減するだけでなく、低光パワーで動作することで、非直線光学効果によるバイアス不安定性が低減される。しかしながら、FOGの寿命を超えると、光回路はより多くの光損失を生み出し、これは、光源によって生成されて光検出器に実際に到達する光パワーがより少なくなることを意味する。光検出器で受信される光が少なくなるにつれて、センサーは、回転に対する感度がより低くなり、回転の信号対雑音比の低減を示す。光ビームが寿命の初めに低光パワーでのみ送信されて、非直線光学誤差が軽減されると、センサーが性能要件をもはや満たすことできなくなる前の光回路の経時変化を考慮するのに、比較的小さなマージンが利用可能である。
【0004】
この問題の1つの可能性のある解決策は、デジタル電子機器を用い、光回路の損失が多くなると、場合によっては光源の光パワー出力を増加させて、光検出器で受信される光パワーレベルを比較的一定に維持することである。今日、FOGの技術分野で実用化されているように、光源は、該光源の光パワー出力が実用可能な限り一定となるように非常に安定したパワー基準を用いて駆動され、これは、その結果として光検出器で受信されるパワーレベルが安定したものとならなくても行われる。この理由は、光源の光パワーの変動がFOG内のスケールファクターのシフト等の誤差を生み出す可能性があるからである。同様に、光パワーに有限ステップの調整を導入して光回路の経時変化に対処することも、許容できないスケールファクター誤差をジャイロスコープ内に生成するおそれがある。例えば、比較的一般的なデジタル/アナログ変換器(DAC)(例えば12ビット分解能を有する)を用いてフィードバック信号を生成し光源を制御する場合、その結果ジャイロスコープ内で生み出されるステップ誤差は、多くの用途にとって耐えられないものとなる。より高い分解能のDACを使用することができるが、そのようなデバイスは、それに対応してより大きなフットプリント及びパワーを必要とし、より多くの熱を発生させる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した理由、及び本明細書を読んで理解することで当業者には明らかになる後述する他の理由により、この技術分野では、光ファイバージャイロスコープにおける改良された光パワー制御システム及び光パワー制御方法が必要とされる。
【課題を解決するための手段】
【0006】
本発明の実施の形態は、光ファイバージャイロスコープにおける光パワー制御方法及び光パワー制御システムを提供し、以下の明細書を読んで検討することによって理解されることになる。
【0007】
1つの実施の形態では、光ファイバージャイロスコープが、光学経路を通って光を送信するジャイロスコープ光源に結合された光源電流サーボ機であって、前記ジャイロスコープ光源を作動させる電流を供給する光源電流ドライブを介して、前記光学経路を通る前記光の強度を制御する、光源電流サーボ機構と、光検出器を介して前記光学経路に結合された強度制御信号プロセッサであって、該強度制御信号プロセッサは、前記光源電流サーボ機構に強度制御信号を出力し、該強度制御信号は、前記光検出器で受信された前記光の強度の関数である、強度制御信号プロセッサと、を備え、前記光源電流サーボ機構は、前記強度制御信号を安定したアナログ電圧基準と比較して、前記光源電流ドライブを調整し、前記光検出器における光パワーを一定の光パワーレベルに向けて駆動する。
【0008】
これらの特徴、態様、及び利点、並びに他の特徴、態様、及び利点は、以下の説明、添付の特許請求の範囲、及び添付図面についてより良く理解される。
【図面の簡単な説明】
【0009】
【図1】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図2】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図3】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図4A】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図4B】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図5】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図6】本発明の1つの実施形態の光ファイバージャイロスコープの簡略化した概略図である。
【図7】本発明の1つの実施形態の方法の実施形態の一実施形態のフロー図である。
【発明を実施するための形態】
【0010】
一般的な慣行に従い、説明するさまざまな特徴は、一律の縮尺で描かれておらず、本発明に関連する特徴を強調するように描かれている。同様の参照符号は、図及び本文の全体にわたり同様の要素を示している。
【0011】
以下の説明では、本説明の一部をなす添付図面が参照される。添付図面には、本発明を実施することができる特定の例示の実施形態として本発明が示されている。これらの実施形態は、当業者が本発明を実施することができるように十分詳細に説明され、他の実施形態を利用することができること、並びに本発明の範囲から逸脱することなく、論理的な変更、機械的な変更、電気的な変更、及び方法の変更を行えることを理解すべきである。したがって、以下の詳細な説明は、限定の意味に解釈すべきではない。また、この明細書のさまざまな部分は、切り離して読むことを意図しているのではなく、記載された説明の教示とともに全体として考慮することを意図している。
【0012】
本発明の実施形態は、光源電流サーボ機構(light source current servo)を用いて、光検出器において一定の光パワーを配信する光ファイバージャイロスコープを提供する。代替的な実施形態は、低帯域幅/低雑音の光源電流サーボ機構を高帯域幅オフセット制御又はDCセンタリング(centering)機構と組み合わせて、放射及び振動の感度を抑制することを更に提供する。本発明の実施形態は、回転速度信号の同期復調又は非同期復調のいずれかと共に用いることができる。
【0013】
以下でより詳細に説明されるように、本明細書で説明する光源電流サーボ機構は、長時間の定数を有しかつ急峻なステップもグリッチもヒステリシスも雑音もないサーボループを通じて光源電流を緩やかにかつ滑らかに調整することを提供する。これを提供することによって、回転信号対雑音比を一定に保つと同時に、非直線光学誤差を最小にすることが可能になるという利益が得られる。以下に提示する代替的な実施形態は、1)光源電流を調整するのにアナログ電圧を用い;2)低速(slow)D/A変換器及び超低帯域幅サーボループを用いて光源電流を調整するデジタルワードを生成するのにフィールドプログラマブルゲートアレイ(FPGA)、マイクロプロセッサ、又は特定用途向け集積回路(ASIC)等の電子機器を用い;かつ3)D/A変換器、及び超低帯域幅ループに加えてこれらの前に、光源電流を調整するデルタシグマ手法(delta sigma approach)を用いて、サーボ機構を動作させる。
【0014】
図1は、本発明の1つの実施形態のFOG100の簡略化した概略図である。FOG100は、システム光検出器で受信される一定の光パワーで動作する。一定パワーの動作は、強度デジタル/アナログ変換器及び強度制御信号処理回路部によって駆動される強度サーボ機構及び光源電流制御サーボ機構によって維持される。従来のFOGの構成及び動作はよく知られており、したがって、綿密には論じないことにする。FOGを論じた代表的なものは、1995年11月7日にStrandjord他に対して発行された米国特許第5,465,149号に見ることができる。この米国特許は参照により本明細書に援用される。
【0015】
図1に示すように、FOG100は、光源108、ファイバーカプラー又はサーキュレーター110(本明細書では光デバイス110と総称する)、本明細書で光集積チップ(IOC)112と呼ぶ多機能処理チップ、及び光ファイバーコイル114を備える。これらは全て、光ファイバー部分116、118、120、及び122によってさまざまに接続される。1つの実施形態では、検知される回転の中心の軸の周囲に巻き付けられたシングルモード光ファイバーを用いて、コイル状光ファイバーが、コア又はスプールの周囲にファイバーコイル114を形成する。
【0016】
光源108は、FOG100内に電磁波を伝播させる広帯域光源を備える。1つの実施形態では、光源108は、スペクトルの赤外線部分又は光学的部分で電磁波を提供する半導体スーパールミネセントダイオード又は希土類ドープファイバー光源である。一般的には、光源108は、ファイバーコイル114内の散乱場所におけるレイリー散乱及びフレネル散乱に起因したこれらの波の間の位相シフト差の誤差を低減するために、放射光について短いコヒーレンス長を有する。
【0017】
システム光検出器128は、光ファイバー部分119から該システム光検出器に衝突する電磁波、すなわち光波を検出し、更には、カプラー110からの戻り結合光ビームを受信する。システム光検出器128は、受信した光波に応じた電流を生成する。
【0018】
動作中、光源108は、光ファイバー116を介して広帯域光波をカプラー又はサーキュレーター110に送信する。サーキュレーター又はカプラー110は、光源からの光をIOC112に送信し、IOC112から戻る光をシステム光検出器128に送信する。いくつかの実施形態では、以下で図5において論じるように、カプラー110は、相対強度雑音(RIN)を低減するため、光源出力の一部分を別個の光検出器に誘導することができる。
【0019】
IOC112に送信された光は、2つの光波124、126に更に分割され、これらの光波は、1つの実施形態では、本明細書に参照により援用される米国特許第5、465,149号に説明されているように位相変調される。2つの光波124、126は、光ファイバー120、122を介してファイバーコイル114に送信される。光波124はファイバーコイル114の長さを時計回りに伝播する。同様に、光波126はファイバーコイル114の長さを反時計回りに伝播する。ファイバーコイル114から送信されIOC112に戻った後、2つの戻り光波124、126は結合され、次いで、カプラー110に提供される。カプラーは、結合された光波をシステム光検出器128に送信し、システム光検出器128は、電流信号134を信号処理電子機器104に供給する。コイル114の回転速度は、サニャック効果によって引き起こされた干渉から、光検出器128で受信された光の光学特性に基づいて信号処理電子機器104により求められる。
【0020】
図1の実施形態では、システム光検出器128への一定の光パワーは、光源電流サーボ機構102及び強度制御信号プロセッサ105を用いることによって維持される。強度制御信号プロセッサ105は、プロセッサ133(デジタル復調機能及び累算機能を含むフィールドプログラマブルゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、及び/又はマイクロプロセッサ等の技術を用いて実施することができる)並びに強度D/A変換器136及び増幅器138を備える。光源電流サーボ機構102及び強度制御信号プロセッサ105の組み合わされた動作によって、FOG100は、該FOG100の寿命全体を通して、システム光検出器128において一定の光パワーを維持するのに十分な光パワーでの動作を維持することが可能になる。また、システム光検出器で受信された光の強度によって変動しないDC電圧オフセットを有する強度制御信号も生成される。プロセッサ133は、IOC112がコイル114内を進む対向伝播光ビームを位相変調するのに用いるバイアス変調信号を提供するために、IOC D/A変換器139に出力を更に提供する。
【0021】
図1に示すように、システム光検出器128からの信号134は、信号処理電子機器105によって受信されると、信号処理電子機器104内において、まず増幅され(130)、次いでA/D変換器132によってデジタル化される。次に、このデジタル化された信号は、強度D/A変換器136に指令するデジタル強度制御ワードを計算するためにプロセッサ133に供給される。強度D/A変換器136の出力は、増幅され(138)、光源電流サーボ機構102に供給される。
【0022】
図1に示す実施形態では、光源電流サーボ機構102は、安定したアナログ基準電圧140、比較増幅器142、超低域通過フィルター144(例えば、タウ=ほぼ1msec〜数時間の時定数を有する)、及び光源電流ドライブ146を備える。
【0023】
光源電流サーボ機構102は、出力された強度制御信号150を受信するように機能し、この信号を、システム光検出器128における目標光パワー又は公称光パワーを表す安定したアナログ基準電圧140と比較する。実際の強度D/A変換器136の出力と目標値との間のずれはゼロ(null)にサーボ制御される。光源電流増幅器142の出力は、大きく低域通過フィルタリングされて(144)、光パワーの量子化雑音等の短期ジッターが最小にされる。このフィルタリングされた出力は、光損失の変化に応じてFOG100の寿命にわたり緩やかに変動することになる。この出力は、光源電流ドライブ146に供給されて、光源108を駆動し、それによって、寿命にわたって目標値又は公称値にロックされたシステム光検出器128の光パワーを維持する。この実施形態の例では、フィルター144は超低帯域幅フィルターである。しかしながら、代替的な実施形態では、以下でより詳細に説明するように、フィルタリングは、当該技術分野で知られている代替的なフィルターによって達成することもできるし、微細な強度制御/フィルタリングのデルタシグマ手法を増強して達成することも、デルタシグマ手法に代わるものによって達成することもできることが理解される。
【0024】
FOG100は、このようにして、ステップ誤差又は影響のある量子化雑音を導入することなく、システム光検出器128における一定の光パワーを維持するために、電流源を緩やかにかつ連続的に変動させる能力をもたらす。システム光検出器128において一定の光パワーを提供する能力によって、システムは、FOG100内の光学部品のいずれについても、その光学部品での光の損失を考慮することが可能になる。システム光検出器における光パワーのこの不変性は、センサーの信号対雑音比を、意図した設計値に安定化させる役割を果たす。第2の利益は、安定した光パワーによって、回転感度すなわちスケールファクターがシステム光検出器における光パワーに正比例するいわゆるオープンレートループ(open rate-loop)FOG等のいくつかのFOG構成におけるスケールファクター不安定性が除去されることである。また、FOG100を低光パワー(すなわち、光検出器128において許容可能な光信号対雑音比を発揮するのに十分であるが、光パワーに比例した非直線誤差を最小にするように十分低い)で動作させる能力によって、これらの非直線光学効果に起因したバイアス不安定性が低減する。最後に、光源電流サーボ機構102は、低帯域幅を有する静穏なシステムを創出し、光パワーに対する突然の調整によって導入されるステップ誤差を回避する。
【0025】
図2は、105で示す強度制御信号プロセッサが、任意選択のデルタシグマパルス幅変調器210(デルタシグマ回路とも呼ぶ)を更に備えることを除いては、図1のFOG100と同じ構成を有するFOG200の代替的な実施形態の概略図である。デルタシグマパルス幅変調器210では、雑音(シグマデルタパルス幅変調によって生成される)が、強度D/A変換器信号に加えられて、量子化雑音が低減される。この代替的な実施形態では、デルタシグマパルス幅変調器210は、強度D/Aデジタル制御ワードの最下位ビットを高速にディザリング(パルス幅変調)することによって強度D/A変換器136の量子化雑音を有効に低減する。このようにして、デルタシグマ変調器410は、強度制御信号プロセッサ105及び光源電流サーボ機構102によって提供される強度サーボ機構制御ループにおいて量子化雑音を劇的に低減する。図4A及び4Bについて以下で論じられるデルタシグマパルス幅変調に関する更に詳細な内容は、図2のデルタシグマパルス幅変調器210に適用可能である。
【0026】
図3は、強度制御サーボ機構をFOG100内の他の機能と容易かつ相乗効果的に組み合わせることができることを示している。例えば、図3は、光パワー制御がA/Dオフセット信号制御と組み合わされているFOG300の一実施形態を示している。A/Dオフセット信号制御の詳細な説明は、1998年9月22日にMorganに対して発行された米国特許第5,812,263号に見ることができる。この米国特許は参照により本明細書に援用される。手短に言えば、A/Dオフセット信号制御は、システム光検出器信号134が、増幅器130を通過した後、A/D変換器132の有限の電圧範囲においてセンタリングされて該A/D変換器に到達することを保証する手段である。そのようなセンタリングによって、A/D変換器132の飽和(その結果、FOG機能が著しく失われる)が防止されるだけでなく、回転信号対雑音比を最大にするために、増幅器130において最大利得を適用することも可能になる。そのようなA/D信号センタリングは、放射又は機械的衝撃等の事象が比較的急速なステップ関数変化を、光パワー、したがってA/D入力電圧に生成する場合がある荒れた外部環境でA/D飽和を防止するのに重要である。光強度制御をA/Dセンタリングと組み合わせることによって、FOGは、緩やかに変動する非直線光学誤差を(新たな雑音を導入することなく)軽減することが可能になり、同時に、放射事象又は衝撃事象(光強度制御にとってはるかに高速すぎて軽減することができない)の中にあっても、A/Dをセンタリングされた状態に保つことが可能になる。また、A/D信号センタリングによって、当業者に理解されるように、A/D変換器自体の有限積分非直線性又は有限微分非直線性に起因したジャイロスコープ性能誤差が最小にされる。
【0027】
図3が示すように、A/Dセンタリング信号152及び強度制御信号150は、単一のD/A変換器136を用いて都合よく生成することができる。増幅器142及び130の相対帯域幅は、2つのループのための対象となる時間スケールを決定する。すなわち、A/Dセンタリング機能は、A/D変換器132の入力における数百Hzの帯域幅を有する急速な変化をゼロにするように設計することができる一方、光源電流サーボ機構102は、同時に、非直線光学誤差に起因した時間ごと又は日ごとのバイアスドリフトを最小にすることができる。この組み合わせによって、急速な環境の影響がA/D変換器132を飽和させることを防止する利益、A/D変換器132の非直線性誤差を最小にする利益、及び緩やかに変動する非直線光学誤差の影響をサーボ制御で除去する利益が同時に提供される。
【0028】
図4Aは、光パワー制御における量子化雑音を最小にする高帯域幅A/Dセンタリング及びデルタシグマパルス幅変調の双方の利益を提供するFOG400の1つの実施形態を示している。
【0029】
FOG400は、図1〜図3で説明したような光源電流サーボ機構102及び光回路101を備える。FOG400は信号処理電子機器404を更に含む。信号処理電子機器404は、上述した増幅器130、A/D変換器132、及びプロセッサ133について説明したように動作する第1の増幅器430、A/D変換器432、及びプロセッサ434を備える。FOG100と異なり、この実施形態では、強度制御信号プロセッサ405は2つの別個のD/A変換器を備え、一方(412で示す)は、A/Dセンタリングを維持するためのものであり、第2のもの(414で示す)は、通常ならば非直線光学誤差を生成する緩やかな光パワードリフトをゼロにするためのものである。
【0030】
強度制御D/A変換器414は、オフセット信号D/A変換器412から独立しており、デルタシグマパルス幅変調器410にデジタルで供給される信号406に依拠している。信号406は、デルタシグマパルス幅変調器410(デルタシグマ回路とも呼ぶ)に提供され、最終的に、図3の強度D/A変換器DAC136と酷似した強度D/A変換器414に出力信号411を供給し、信号406がアナログ領域に変換され、強度制御信号150が光源電流サーボ機構102に提供される。
【0031】
その間、オフセット信号D/A変換器412は、信号406に依拠してA/Dセンタリング信号452を生成する。A/Dセンタリング信号452は、増幅され(415)、システム光検出器信号134と合計され、増幅器430を通って戻され、信号処理電子機器404を駆動する。上述したように、A/Dオフセット信号制御は、システム光検出器信号134が、増幅器430を通過した後、A/D変換器432の有限の電圧範囲においてセンタリングされて該A/D変換器に到達することを保証する手段である。そのようなA/D信号センタリングによって、当業者に理解されるように、A/D変換器432の飽和が(動的な振動状態、衝撃状態、及び放射状態のもとであって)防止され、A/D変換器自体の有限積分非直線性又は有限微分非直線性に起因したFOG400性能誤差も最小になる。
【0032】
図4Aの実施形態の例はさまざまな利点を有する。まず、独立した強度DAC414を利用することによって、光源電流サーボ機構102は、オフセット信号D/Aループの出力452に潜在的に影響を及ぼす可能性のある外部環境の大きな変化が回路内に存在すると仮定しても、その変化から防護される。したがって、光源電流サーボ機構102によって作成される外側ループは、より低コストの構成要素及びより低いフィルタリング能力で動作することができるが、それでも、ループ452からの可能性のある雑音が機能に影響を及ぼすことが防止される。この場合に、明確にするために、2つの別個のD/A変換器が示されているが(すなわち、一方はオフセット制御機能のためのものであり、もう一方はデルタシグマ変調を用いた強度制御のためのものである)、いくつかの実施形態では、双方の機能を単一のD/A変換器を用いて実行することが可能である。
【0033】
図4Bは、デルタシグマパルス幅変調器410の一実施形態の概略図である。デルタシグマパルス幅変調器410は、光パワーの高精度デジタル表現である信号406を受信し、強度D/A変換器414のバランスされた高周波数パルス幅変調を(ジャイロ雑音感度をかなり上回る周波数で)用いて、D/A変換器414がこのディザリングなしで可能である分解能よりも高い分解能を有する平均アナログ値を生成する。強度D/A変換器414によって表されるこの出力は、次に、光源電流サーボ機構102に提供され、光源電流サーボ機構102において、高精度電圧基準140と比較される。光源電流サーボ機構102によって提供される光源電流の初期値は、ユーザー又は代替的な機能回路によってプログラム可能とすることができ、動作時又は動作前の或る時に求めることができる。デルタシグマパルス幅変調器410は、信号406を用い、積分フィードバックループ(加算器416、積分器418、及びパルス幅量子化器419を備える)及び超低帯域幅サーボ機構102を介して平均出力をサーボ制御して積分誤差を除去する。すなわち、信号406の有限の量子化ステップは、信号406の下位ビットをディザリングし、次いでループ帯域幅フィルターを有する増幅器418において積分することにより平均される。
【0034】
図4A及び図4Bのデルタシグマ手法も種々の利点を有する。まず、変調器410のデルタシグマ回路部は、図3の実施形態と酷似し、信号処理電子機器404内においてオフセット信号D/Aループから独立しており、したがって、その比較的高帯域幅のループ内で生成される雑音により影響を大きく受けない。さらに、デルタシグマ手法は、雑音成分が十分にフィルタリングされた十分小さなポンプ電流ステップ変化によって強度制御信号150を動作させることを可能にする。したがって、図4A及び図4Bのデルタシグマ手法によって、光源電流サーボ機構102は、低コストで性能が低めの構成要素を用いても、高い電流制御性能を発揮することが可能になる。
【0035】
図5に示す更に別の実施形態では、光源電流サーボ機構102によって達成される光パワーの制御をFOG100内の更に他の機能と組み合わせることができる。例えば、図5は、図3で具体的に説明した光パワー制御が信号処理電子機器104内の追加の回路部と組み合わされて相対強度雑音(RIN)の影響を低減する一実施形態(包括的に500)を示している。RINは、当業者によく知られているように、多くの場合、FOG内の支配的な回転速度測定雑音源である。1995年11月21日にBlake他に対して発行された米国特許第5,469,257号、及び2004年7月20日に発行された米国特許第6,765,678号は、ともに参照により本明細書に援用されるが、FOG雑音に対するRINの影響を低減する方法を記載している。図5は、カプラー/サーキュレーター110に結合された第2の光検出器532(RIN光検出器532と呼ぶ)が光源108で生成された相対強度雑音を検知する一実施形態を伝えている。この雑音は、システム光検出器128に雑音を有するコモンモードであり、したがって、2つの光検出器信号を減算すると、その結果、システム光検出器信号は、RINの多くが除去される。この減算手法は、双方の光検出器におけるDC光パワーの正確な知識及び/又は正規化に依拠する。図5の実施形態では、信号処理電子機器104は、RIN増幅器510、RIN A/D変換器512、及びRIN復調ブロック514を更に備える。RIN増幅器510は、RIN光検出器532からの出力を受信し、RIN検出器の光パワーは、RIN復調ブロック514の出力から求めることができる。RIN光検出器532からの出力とレート復調器516からの出力(システム光検出器信号134から生成される)との間の差分(518で取られる)がプロセッサ133に提供される。次に、システム検出器パワーは、プロセッサ133によって強度D/A変換器136に提供される強度D/A制御ワードから求めることができる。
【0036】
上記で論じた実施形態は、光コイルから出る光から測定される光パワーを安定化させるためにシステム光検出器を利用して説明されているが、本発明の範囲内の他の実施形態は、代替的に、例えば非直線光学効果をコイルの入口近くで補正するために、コイルに入る光パワーを安定化させることができる。当業者ならば、この明細書を検討すると、これは、光ビームの分割の前に、コイルに向かって進む光ビームの光パワーを監視する光検出器を(例えばカプラーを介して)利用することにより達成することができることを理解するであろう。RIN光検出器は、この光パワーを測定することができる一例である。
【0037】
図6は、光源電流サーボ機構102による光回路101の光パワー制御が、RIN減算及び別の有益な機能、すなわちデジタル強度正規化と組み合わされて、kHzの周波数まで、さらには数十kHzの周波数までの振動からの急速な強度変調の影響を抑制する1つの詳細な実施形態(600)を示している。デジタル強度正規化は、このように、光強度制御よりもはるかに高く、A/Dセンタリングよりも更に高い、非常に高い帯域幅で行われる。したがって、光強度制御、A/Dセンタリング、及びデジタル強度正規化を組み合わせることによって、図6の実施形態は、誤差を除去することができるこれまでよりも広い範囲の周波数/時間スケールをカバーする。
【0038】
信号処理電子機器604内では、デジタル強度正規化は、図6に見られるような正規化回路610によって実施される。デジタル正規化の概念は、2008年4月3日に公開されたGreeningに対する米国特許出願公開第2008/0,079,946号に記載されている。この米国特許出願は参照により本明細書に援用される。図6の実施形態では、レート復調回路616及びRIN復調器(Demod)614の出力信号がともに、618における減算の前に、610において正規化される。この正規化によって、光源電流サーボ機構102による光パワーの緩やかな調整がRIN減算の効力を低減しないことが保証される。また、低帯域幅の光パワー制御を、それよりも高い帯域幅のA/Dオフセットセンタリング(620で包括的に示す)及び超高帯域幅の強度正規化と組み合わせることによって、サブHzから数十kHzのダイナミックレンジにわたるジャイロスコープ誤差メカニズムを抑制することが可能であることを理解することができる。
【0039】
代替的な実施形態では、レート復調回路616は、システムのニーズに応じて、同期設計又は非同期設計とすることができることに留意されたい。同期復調設計及び非同期復調設計の詳細な内容は、2007年5月10日にGreening他に対して発行された米国特許第7,333,209号で論じられている。この米国特許は参照により本明細書に援用され。本発明の実施形態によって提供される光パワー制御は、同期復調及び非同期復調の双方と適合している。1つの実施形態では、相対強度雑音低減回転速度信号は、光路を進む光の変調を駆動する誤差抑制変調信号を生成するのに用いられる。また、1つの実施形態では、電子機器604のデジタル/アナログ変換器ループが結合されて、システム光検出器128からの電気信号134を受信し、システム光検出器128で受信された光の強度によって変動しないDC電圧オフセットを有する強度制御信号150を出力する。図6に示すように、信号処理電子機器604はデジタル制御信号を出力する。このデジタル制御信号は、アナログに変換され(622)、増幅されて(624)、IOC112において光ビームの変調を駆動するバイアス変調信号を生成する。
【0040】
図7は、本発明の1つの実施形態の方法の一実施形態のフロー図である。この方法は、710から開始し、システム光検出器において測定される光ファイバージャイロスコープの光学経路内の光の強度を求める。ここで、光学経路内の光は光源によって生成される。この方法は、720に進み、例えばシステム光検出器において光学経路内の光の強度から導出されたアナログ信号を安定したアナログ電圧基準と比較することにより、光源電流サーボ機構を用いて、光源を動作させる光源電流ドライブの電流出力を制御する。
【0041】
この方法は730に進み、光源電流ドライブの調整に、電流出力から量子化雑音を除去するフィルターを適用する。1つの実施形態では、光源電流ドライブの調整にフィルターを適用することは、光源電流ドライブを制御する信号に超低帯域幅フィルターを適用することを含む。長時間一定(例えば、ほぼ数秒〜数時間)を有する光源電流サーボ機構を利用することによって、光源電流は、急峻なステップもグリッチもヒステリシスもなく緩やかにかつ滑らかに調整される。別の実施形態では、フィルターを適用することは、雑音スペクトルをデジタルループ出力信号から積分消去するデルタシグマ積分フィードバックループを用いて、デジタルループ出力信号を処理することを含む。他の実施形態では、当業者がこの明細書を読めば理解するように、他の形態のフィルタリングを適用することもできるし、組み合わせることもできる。
【0042】
図7に提示する方法の1つの実施形態では、光源電流サーボ機構は、1組の信号処理電子機器内で強度D/A変換器から出力信号を受信するように機能し、その信号をフィルタリングして、影響のある量子化雑音なしでジャイロスコープの光源を駆動する光源電流を達成する。このフィルタリングされた出力は、FOGの寿命にわたって緩やかに変動し、光源電流ドライブに供給されて光源を駆動する。また、A/Dセンタリング制御ループ及びデジタル強度正規化回路を含む信号処理電子機器によって、FOGは外力に対する不感度性を獲得する。
【0043】
この説明は、例示の目的で提示され、網羅的であることを意図するものでもなければ、開示した実施形態に限定することを意図するものでもない。この後に続く特許請求の範囲の範囲内に含まれる変形及び変更を行うことができる。例えば、上述した実施形態は、FOGに関するものであるが、FOGの任意の変形又は種類が、説明した発明を利用することができるが理解される。さらに、後述する構成要素のいくつかは、デジタル回路部若しくはアナログ回路部、又は双方の組み合わせのいずれかを用いて実施することができ、適宜、適した処理回路部及びマシン可読ストレージ媒体で実行されるソフトウェアを通じて実現することができる。
【0044】
いくつかの手段が、この明細書で論じたような本発明のシステム及び方法を実施するのに利用可能である。これらの手段には、デジタルコンピューターシステム、マイクロプロセッサ、特定用途向け集積回路(ASIC)、汎用コンピューター、プログラマブルコントローラー、及びフィールドプログラマブルゲートアレイ(FPGA)が含まれるが、これらに限定されるものではない。これらの全ては、本明細書では「プロセッサ」と総称することがある。例えば、1つの実施形態では、信号処理は、FPGA又はASICによって組み込むこともできるし、代替的に、組込みプロセッサ又はディスクリートプロセッサによって組み込むこともできる。したがって、本発明の他の実施形態は、そのような手段によって実施されると、本発明の実施形態を実施することが可能になる、コンピューター可読媒体上に存在するプログラム命令である。コンピューター可読媒体には、任意の形態の物理的なコンピューターメモリデバイスが含まれる。そのような物理的なコンピューターメモリデバイスの例には、パンチカード、磁気ディスク若しくは磁気テープ、光データストレージシステム、フラッシュ読出専用メモリ(ROM)、不揮発性ROM、プログラマブルROM(PROM)、消去可能プログラマブルROM(E−PROM)、ランダムアクセスメモリ(RAM)、又は他の任意の形態の永久的、半永久的、若しくは一時的なメモリストレージシステム若しくはデバイスが含まれるが、これらに限定されるものではない。プログラム命令には、コンピューターシステムプロセッサ及び超高速集積回路(VHSIC)ハードウェア記述言語(VHDL)等のハードウェア記述言語によって実行されるコンピューター実行可能命令が含まれるが、これに限定されるものではない。
【0045】
特定の実施形態を本明細書で図示及び説明してきたが、示した特定の実施形態の代わりに同じ目的を達成するように適合された任意の装置を用いることができることが、当業者によって理解されよう。本願は、本発明の任意の適合形態又は変形形態を包含することを意図している。したがって、本発明が特許請求の範囲及びその均等物によってのみ限定されることが意図されているのは明白である。
【特許請求の範囲】
【請求項1】
光ファイバージャイロスコープ(100)であって、
光学経路を通って光を送信するジャイロスコープ光源(108)に結合された光源電流サーボ機構(102)であって、前記ジャイロスコープ光源(108)を作動させる電流を供給する光源電流ドライブ(146)を介して、前記光学経路を通る前記光の強度を制御する、光源電流サーボ機構と、
光検出器(128)を介して前記光学経路に結合された強度制御信号プロセッサ(105)であって、該強度制御信号プロセッサ(105)は、前記光源電流サーボ機構(102)に強度制御信号を出力し、該強度制御信号は、前記光検出器(128)で受信された前記光の強度の関数である、強度制御信号プロセッサと
を備え、
前記光源電流サーボ機構(102)は、前記強度制御信号を安定したアナログ電圧基準と比較して、前記光源電流ドライブ(146)を調整し、前記光検出器(128)における光パワーを一定の光パワーレベルに向けて駆動する光ファイバージャイロスコープ。
【請求項2】
前記強度制御信号プロセッサ(105)は、プロセッサ(133)に結合された強度デジタル/アナログ変換器(136)であって、該強度デジタル/アナログ変換器(136)は、前記光検出器(128)で受信された光パワーのデジタル表現を提供するデジタル強度制御ワードを前記プロセッサ(133)から受信する、強度デジタル/アナログ変換器を更に備え、
前記強度デジタル/アナログ変換器(136)は、前記光検出器128で受信された前記光の強度を表すアナログ強度信号を出力し、
前記光源電流サーボ機構(102)は、前記光源電流ドライブ(146)の調整にフィルターを適用して量子化雑音を除去する請求項1に記載の光ファイバージャイロスコープ。
【請求項3】
前記光源電流サーボ機構(102)のループは、
前記デジタル強度制御ワードを受信するデルタシグマ回路(210)であって、該デルタシグマ回路の出力信号は、パルス幅変調(PWM)された強度制御信号である、デルタシグマ回路と、
前記デルタシグマ回路の前記出力をアナログに変換する強度デジタル/アナログ変換器(136)と
を更に備え、
前記デルタシグマ回路(210)は、
前記デジタルループ出力信号から雑音スペクトルを積分消去する積分フィードバックループ(416、418、419)を備える請求項1に記載の光ファイバージャイロスコープ。
【請求項1】
光ファイバージャイロスコープ(100)であって、
光学経路を通って光を送信するジャイロスコープ光源(108)に結合された光源電流サーボ機構(102)であって、前記ジャイロスコープ光源(108)を作動させる電流を供給する光源電流ドライブ(146)を介して、前記光学経路を通る前記光の強度を制御する、光源電流サーボ機構と、
光検出器(128)を介して前記光学経路に結合された強度制御信号プロセッサ(105)であって、該強度制御信号プロセッサ(105)は、前記光源電流サーボ機構(102)に強度制御信号を出力し、該強度制御信号は、前記光検出器(128)で受信された前記光の強度の関数である、強度制御信号プロセッサと
を備え、
前記光源電流サーボ機構(102)は、前記強度制御信号を安定したアナログ電圧基準と比較して、前記光源電流ドライブ(146)を調整し、前記光検出器(128)における光パワーを一定の光パワーレベルに向けて駆動する光ファイバージャイロスコープ。
【請求項2】
前記強度制御信号プロセッサ(105)は、プロセッサ(133)に結合された強度デジタル/アナログ変換器(136)であって、該強度デジタル/アナログ変換器(136)は、前記光検出器(128)で受信された光パワーのデジタル表現を提供するデジタル強度制御ワードを前記プロセッサ(133)から受信する、強度デジタル/アナログ変換器を更に備え、
前記強度デジタル/アナログ変換器(136)は、前記光検出器128で受信された前記光の強度を表すアナログ強度信号を出力し、
前記光源電流サーボ機構(102)は、前記光源電流ドライブ(146)の調整にフィルターを適用して量子化雑音を除去する請求項1に記載の光ファイバージャイロスコープ。
【請求項3】
前記光源電流サーボ機構(102)のループは、
前記デジタル強度制御ワードを受信するデルタシグマ回路(210)であって、該デルタシグマ回路の出力信号は、パルス幅変調(PWM)された強度制御信号である、デルタシグマ回路と、
前記デルタシグマ回路の前記出力をアナログに変換する強度デジタル/アナログ変換器(136)と
を更に備え、
前記デルタシグマ回路(210)は、
前記デジタルループ出力信号から雑音スペクトルを積分消去する積分フィードバックループ(416、418、419)を備える請求項1に記載の光ファイバージャイロスコープ。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【公開番号】特開2012−103251(P2012−103251A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−245607(P2011−245607)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2011−245607(P2011−245607)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]