
光ファイバ監視システム
光ファイバ監視システム10は、光ファイバポイントセンサ16のシリアルアレイ15を含む光ファイバセンサ15を含み、連続するポイントセンサは、分散光ファイバセンサ18によって結び付けられている。システムは、センサに沿った侵入者イベントの場所が特定されることを可能にし、先行技術と比べて、誤認警報の発生率の低下をもたらす。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ファイバ監視システムに関し、詳細には、光ファイバ周辺部監視システムに関する。
【背景技術】
【0002】
光ファイバを検出素子として使用して、圧力、ひずみなどを検出し、光ファイバ外部の状態が、振幅、周波数、または偏光などの特性の変化、ファイバからの光出力の変化から推定されることが知られている。一例は、欧州特許第0365062号に記載されている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
周辺部監視に対する1つのアプローチは、監視される周辺部のまわりの地下に単一長さの光ファイバを配置し、LEDまたはレーザダイオードからの放射をファイバに結合することである。ファイバによって範囲が定められた周辺部を横切る人、乗り物、またはその他の物体の重量に起因してファイバにかかる圧力により、(ファイバが曲がることに起因して)ファイバ内で後方散乱させられる放射の量に変化が生じ、そのため、侵入者の存在が検出されることが可能である。しかし、そのようなシステムは、3つの重大な欠点を有する。すなわち、(i)侵入者が周辺部を横切る位置を、正確に検出することができないこと、(ii)かなりの誤認警報率、(iii)侵入する人または物体の性質について全く情報が与えられないこと、および(iv)単一のファイバで複数の検出区域を多重化することができないことである。代替として、ファイバの伝送は、米国特許第4812645号で記載されるように監視されることが可能である。このタイプのシステムも、同様の欠点を有する。
【0004】
光ファイバ干渉センサを使用して、圧力および振動を検出することができる。ある長さの光ファイバが、外部圧力を受けると、ファイバは、変形させられる。この変形により、ファイバの光路長が変化し、その変化が、ファイバを通る光の位相の変化として検出されることが可能である。位相の非常に小さい変化に関して分析することが可能であるので、光ファイバセンサは、印加された圧力に対する感度が極めて高い。そのようなセンサが、干渉センサと呼ばれる。この高い感度により、光ファイバセンサが、例えば、10−4パスカルという圧力に相当する強度の音波が、普通に検出可能である音響ハイドロホンにおいて使用されることが可能になる。英国特許出願公開第2262803号が、分散光ファイバセンサのシリアルアレイを有する干渉計システムを記載しているが、そのようなシステムは、侵入者についての正確な位置情報、または侵入者の性質に関する情報を全く提供しない。
【0005】
英国特許出願公開第2176364号は、局所化された光ファイバセンサのシリアルアレイを開示している。このシステムは、侵入する人、乗り物などが、局所化された複数のセンサの1つのセンサを通る場合だけしか、検出をもたらすことができない。
【課題を解決するための手段】
【0006】
本発明の第1の態様によれば、これらの問題は、センサアレイが、少なくとも2つの光ファイバポイントセンサを備え、連続するポイントセンサの各ペアが、分散光ファイバセンサによって結び付けられることを特徴とする、監視システムのための光ファイバセンサアレイによって改善される。
【0007】
光ファイバセンサは、局所的電子装置に頼ることなしに、多重化されることができるという利点を有する。また、干渉センサは、長さが、通常のセキュリティ区域周辺部(20m〜100m)を範囲に含むのに十分である、分散センサに形成することもできる。ポイントセンサと間隙の分散センサとの、この混成アプローチを採用することにより、システムは、高い検出効率の恩恵を受ける。
【0008】
本発明の第2の態様は、光ファイバ監視システムを提供し、光ファイバ監視システムが、質問システムに接続された本発明の光ファイバセンサを含み、この質問システムは、アレイの少なくとも1つのセンサに印加された力に起因する、アレイの少なくとも1つのセンサにおける光位相偏位に応答し、かつ前記力が印加された位置を確定するように構成されることを特徴とする。
【0009】
力は、監視下にある経路を横切る人、動物、乗り物、またはその他の物体によって印加されることが可能であり、センサアレイは、経路の上に、または経路の近くに、あるいは経路の下に配置される。
【0010】
これにより、周辺部監視に適し、かつ高度に多重化されることが可能な、低費用の信頼できる光ファイバ監視システムが提供される。遠隔質問が可能であり、したがって、局所的電子装置も、局所的電力も要求されない。
【0011】
光ファイバセンサアレイは、光ファイバケーブルによって、または代替としてトランスデューサおよびワイヤケーブルによって、質問システムに接続されることが可能である。
【0012】
光ファイバポイントセンサは、曲げディスクに巻かれた光ファイバを含むことが可能であり、または、例えば受振器であることが可能である。
【0013】
代替として、光ファイバポイントセンサは、光ファイバ加速度計であってもよい。セキュリティおよび地震調査において極めて低いレベルの振動を監視する必要性が、ますます感度の高い加速度計の開発に拍車をかけてきた。光ファイバ技術は、干渉計技術に基づく光ファイバ加速度計の形態で、この特定の分野に適用されてきた。光ファイバ加速度計の設計に対するコンプライアントシリンダアプローチが、そのような干渉計に組み込まれる場合、特に有効である。1つの知られているアプローチでは、サイスミックマス(seismic mass)が、2つのコンプライアントシリンダによって定位置に保持され、各シリンダの周囲のまわりに、干渉計のアームを形成する単一モード光ファイバが巻かれている。別のアプローチでは、サイスミックマスが積まれた単一のコンプライアントシリンダの周囲に、光ファイバが巻かれる。
【0014】
分散光ファイバセンサは、好ましくは、分散センサにかかる圧力、またはセンサの曲げを測定するための光ファイバパッケージを含む。
【0015】
好ましくは、質問システムは、反射光測定の干渉計質問システムを含み、より好ましくは、干渉計質問システムは、TDM(時間分割多重化)を使用して個々のセンサが区別される、パルス反射光測定の干渉計質問システムを含む。これは、分散センサおよびポイントセンサで使用することができる、非常に効率的な多重化アーキテクチャである。さらに、WDM(波長分割多重化)を使用して、単一のファイバで多重化されるセンサの数をさらに増やすことができる。
【0016】
代替として、干渉計質問システムは、レイリー後方散乱の干渉計質問システムを含むことが可能であり、パルスレイリー後方散乱の干渉計質問システムが、特に好ましい。
【0017】
非レイリー後方散乱の反射光測定システムは、センサ間の個々の反射器に依存する。これらは、システム全体の費用に追加されることがある比較的高価な構成部品である。これに対して、レイリー後方散乱は、光ファイバ内の不均質性からの光の反射に依存する。これにより、個々の反射器の必要性が除かれ、システムの全体的費用が低減される。しかし、そのようなシステムから収集されたデータは、反射光測定質問システムよりも複雑な分析を要する。
【0018】
本発明の第3の態様は、地表を移動する物体が、地表上の閉じた経路または固定長の開いた経路を横切る位置を確定する方法を提供し、
(i)請求項1に記載のセンサを、前記経路の上にまたは前記経路の下に位置付けるステップと、
(ii)センサから受け取られた光信号を分析して、経路沿いの物体の位置、または物体が前記経路を横切った位置を確定するステップとを含むことを特徴とする。
【0019】
光信号は、好ましくは、前記位置を探し出しかつ確認するために、アレイ沿いに隣接する光ファイバポイントセンサから受け取られた信号の間の遅延を測定し、かつそれらの信号を、それらの光ファイバポイントセンサを結び付ける分散光ファイバアレイからの信号と結合することによって分析される。
【0020】
本発明の実施形態を、単に例として、本発明による光ファイバ周辺部監視システムを概略で示す添付の図面を参照して説明する。
【発明を実施するための最良の形態】
【0021】
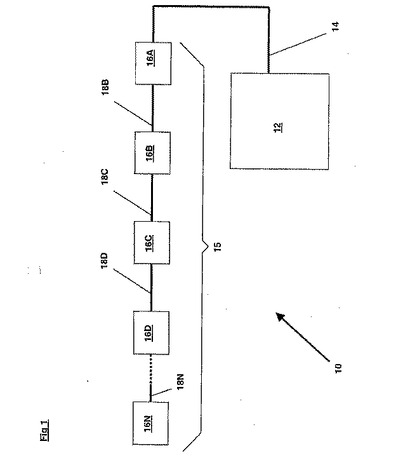
図1では、本発明による光ファイバ周辺部監視システムが、10によって全体的に示されている。システム10は、一連の光ファイバポイントセンサ16A、16B、16C、16D、...、16Nを含み、これら一連の光ファイバポイントセンサは、一連の分散光ファイバセンサ18B、18C、18D、...、18Nによって光学的に結び付けられて、光ファイバセンサアレイ15を形成する。データリンク14が、受振器16Aを質問ユニット12に結合する。データリンク14は、ある長さの光ファイバであることが可能であり、したがって、光信号が質問ユニット12に送られ、または代替として、リンク14は、光信号を電気信号に変換する検出器と、質問ユニット12への固定の電気リンク、または無線リンクとを含むことが可能である。
【0022】
分散光ファイバセンサ18B、18C、18D、...、18Nは、それぞれ、100mの物理的長さを有する。アレイ15には250個の受振器が存在し、したがって、受振器16A、16Nの離隔は、最大でおよそ24.9kmであることが可能である。
【0023】
受振器16A、16B、16C、16D、...、16Nそれぞれは、曲げディスクに巻かれたおよそ100mの光ファイバを含み、ファイバに生じたひずみを介して、加速および変位を測定することができる。分散センサ18B、18C、18D、...、18Nそれぞれは、ケーブル内にひとまとめにされた100mの光ファイバを含み、やはり、ファイバに生じたひずみを介して、ケーブルにかかる圧力、またはケーブルの曲げを測定することができる。
【0024】
アレイ15は、任意の所望される構成で配置することができ、例えば、アレイ15は、例えば、建造物のための周辺部監視を提供するように、閉じた経路のまわりに配置されることができ、代替として、アレイ15は、アレイ15によって範囲が定められた直線を横切る人/物体の位置に関する情報を提供するように、直線の形に配置されてもよい。
【0025】
システム10は、以下のとおり動作する。個人または物体が、アレイ15が上に、または下に位置付けられている線または周辺部を横切ると、その個人または物体の重量に起因する力(加えて、場合により、衝撃が存在する場合、運動量の変化に起因する力も)が、センサアレイに印加される。これにより、人/物体が横切った場所に対応する分散光ファイバセンサ内の放射が、反射されて受振器16Aに戻り、およその場所を与える対応する信号が、質問ユニット12に送られる。より詳細には、質問ユニット12は、横断が、アレイ15の全長上のどこかで生じたことを識別することができる。また、放射は、分散センサの両側の受振器からも反射されて戻り、対応する信号が、やはり質問ユニット12に送られる。質問ユニット12は、分散センサ、およびセンサの両側の受振器から受け取られた信号の三角測量を実行して、信号が受け取られた時刻に基づき、人/物体が横切ったアレイ15に沿った場所を正確に決定する。両方のタイプのセンサからのデータを使用することにより、1つのタイプのセンサだけの使用を介して実現可能であるよりも、人/物体のはるかに正確な分類を提供することが可能である。向上した分類により、より低い誤認警報率がもたらされる。
【0026】
例示的なシステム10では、ポイント光ファイバセンサは、受振器であるが、他のタイプの光ファイバポイントセンサを使用してもよい。
【0027】
ポイントセンサ、および分散センサの数は、監視されることが所望される周辺部または経路の長さと、侵入者イベントを位置特定することが所望される精度の両方に応じて、異なることが可能である。本発明の最も単純な光ファイバセンサは、それぞれの側にポイントセンサを有する単一の分散センサを含む。
【0028】
地表に設置された光ファイバ加速度計を使用して、歩いている人を検出する範囲が、ある地表タイプでは、>30mであることが可能であるとすると、例えば、40m間隔で配置された加速度計のアレイにより、周辺部が完全にカバーされることが確実になる。
【0029】
隣接する加速度計で受け取られた信号を比較して、信号上の共通の特徴間における時間差を測定することにより、間隙のファイバの全長に沿った侵入の位置を正確に計算することが可能である。
【0030】
加速度計信号、および分散間隙検出ケーブルから受け取られた信号のさらなる時間的分析および頻度分析により、侵入分類が可能になり、それによってシステム誤認警報率が低減される。
【0031】
適切には、知られている距離は、20mから50mまでの範囲内である。知られている距離とは、光ファイバセンサの物理的分離を指し、各センサ間の光ファイバの光路長、および各加速度計内で使用されるファイバの長さによって規定される。
【図面の簡単な説明】
【0032】
【図1】本発明による光ファイバ周辺部監視システムを示す。
【技術分野】
【0001】
本発明は、光ファイバ監視システムに関し、詳細には、光ファイバ周辺部監視システムに関する。
【背景技術】
【0002】
光ファイバを検出素子として使用して、圧力、ひずみなどを検出し、光ファイバ外部の状態が、振幅、周波数、または偏光などの特性の変化、ファイバからの光出力の変化から推定されることが知られている。一例は、欧州特許第0365062号に記載されている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
周辺部監視に対する1つのアプローチは、監視される周辺部のまわりの地下に単一長さの光ファイバを配置し、LEDまたはレーザダイオードからの放射をファイバに結合することである。ファイバによって範囲が定められた周辺部を横切る人、乗り物、またはその他の物体の重量に起因してファイバにかかる圧力により、(ファイバが曲がることに起因して)ファイバ内で後方散乱させられる放射の量に変化が生じ、そのため、侵入者の存在が検出されることが可能である。しかし、そのようなシステムは、3つの重大な欠点を有する。すなわち、(i)侵入者が周辺部を横切る位置を、正確に検出することができないこと、(ii)かなりの誤認警報率、(iii)侵入する人または物体の性質について全く情報が与えられないこと、および(iv)単一のファイバで複数の検出区域を多重化することができないことである。代替として、ファイバの伝送は、米国特許第4812645号で記載されるように監視されることが可能である。このタイプのシステムも、同様の欠点を有する。
【0004】
光ファイバ干渉センサを使用して、圧力および振動を検出することができる。ある長さの光ファイバが、外部圧力を受けると、ファイバは、変形させられる。この変形により、ファイバの光路長が変化し、その変化が、ファイバを通る光の位相の変化として検出されることが可能である。位相の非常に小さい変化に関して分析することが可能であるので、光ファイバセンサは、印加された圧力に対する感度が極めて高い。そのようなセンサが、干渉センサと呼ばれる。この高い感度により、光ファイバセンサが、例えば、10−4パスカルという圧力に相当する強度の音波が、普通に検出可能である音響ハイドロホンにおいて使用されることが可能になる。英国特許出願公開第2262803号が、分散光ファイバセンサのシリアルアレイを有する干渉計システムを記載しているが、そのようなシステムは、侵入者についての正確な位置情報、または侵入者の性質に関する情報を全く提供しない。
【0005】
英国特許出願公開第2176364号は、局所化された光ファイバセンサのシリアルアレイを開示している。このシステムは、侵入する人、乗り物などが、局所化された複数のセンサの1つのセンサを通る場合だけしか、検出をもたらすことができない。
【課題を解決するための手段】
【0006】
本発明の第1の態様によれば、これらの問題は、センサアレイが、少なくとも2つの光ファイバポイントセンサを備え、連続するポイントセンサの各ペアが、分散光ファイバセンサによって結び付けられることを特徴とする、監視システムのための光ファイバセンサアレイによって改善される。
【0007】
光ファイバセンサは、局所的電子装置に頼ることなしに、多重化されることができるという利点を有する。また、干渉センサは、長さが、通常のセキュリティ区域周辺部(20m〜100m)を範囲に含むのに十分である、分散センサに形成することもできる。ポイントセンサと間隙の分散センサとの、この混成アプローチを採用することにより、システムは、高い検出効率の恩恵を受ける。
【0008】
本発明の第2の態様は、光ファイバ監視システムを提供し、光ファイバ監視システムが、質問システムに接続された本発明の光ファイバセンサを含み、この質問システムは、アレイの少なくとも1つのセンサに印加された力に起因する、アレイの少なくとも1つのセンサにおける光位相偏位に応答し、かつ前記力が印加された位置を確定するように構成されることを特徴とする。
【0009】
力は、監視下にある経路を横切る人、動物、乗り物、またはその他の物体によって印加されることが可能であり、センサアレイは、経路の上に、または経路の近くに、あるいは経路の下に配置される。
【0010】
これにより、周辺部監視に適し、かつ高度に多重化されることが可能な、低費用の信頼できる光ファイバ監視システムが提供される。遠隔質問が可能であり、したがって、局所的電子装置も、局所的電力も要求されない。
【0011】
光ファイバセンサアレイは、光ファイバケーブルによって、または代替としてトランスデューサおよびワイヤケーブルによって、質問システムに接続されることが可能である。
【0012】
光ファイバポイントセンサは、曲げディスクに巻かれた光ファイバを含むことが可能であり、または、例えば受振器であることが可能である。
【0013】
代替として、光ファイバポイントセンサは、光ファイバ加速度計であってもよい。セキュリティおよび地震調査において極めて低いレベルの振動を監視する必要性が、ますます感度の高い加速度計の開発に拍車をかけてきた。光ファイバ技術は、干渉計技術に基づく光ファイバ加速度計の形態で、この特定の分野に適用されてきた。光ファイバ加速度計の設計に対するコンプライアントシリンダアプローチが、そのような干渉計に組み込まれる場合、特に有効である。1つの知られているアプローチでは、サイスミックマス(seismic mass)が、2つのコンプライアントシリンダによって定位置に保持され、各シリンダの周囲のまわりに、干渉計のアームを形成する単一モード光ファイバが巻かれている。別のアプローチでは、サイスミックマスが積まれた単一のコンプライアントシリンダの周囲に、光ファイバが巻かれる。
【0014】
分散光ファイバセンサは、好ましくは、分散センサにかかる圧力、またはセンサの曲げを測定するための光ファイバパッケージを含む。
【0015】
好ましくは、質問システムは、反射光測定の干渉計質問システムを含み、より好ましくは、干渉計質問システムは、TDM(時間分割多重化)を使用して個々のセンサが区別される、パルス反射光測定の干渉計質問システムを含む。これは、分散センサおよびポイントセンサで使用することができる、非常に効率的な多重化アーキテクチャである。さらに、WDM(波長分割多重化)を使用して、単一のファイバで多重化されるセンサの数をさらに増やすことができる。
【0016】
代替として、干渉計質問システムは、レイリー後方散乱の干渉計質問システムを含むことが可能であり、パルスレイリー後方散乱の干渉計質問システムが、特に好ましい。
【0017】
非レイリー後方散乱の反射光測定システムは、センサ間の個々の反射器に依存する。これらは、システム全体の費用に追加されることがある比較的高価な構成部品である。これに対して、レイリー後方散乱は、光ファイバ内の不均質性からの光の反射に依存する。これにより、個々の反射器の必要性が除かれ、システムの全体的費用が低減される。しかし、そのようなシステムから収集されたデータは、反射光測定質問システムよりも複雑な分析を要する。
【0018】
本発明の第3の態様は、地表を移動する物体が、地表上の閉じた経路または固定長の開いた経路を横切る位置を確定する方法を提供し、
(i)請求項1に記載のセンサを、前記経路の上にまたは前記経路の下に位置付けるステップと、
(ii)センサから受け取られた光信号を分析して、経路沿いの物体の位置、または物体が前記経路を横切った位置を確定するステップとを含むことを特徴とする。
【0019】
光信号は、好ましくは、前記位置を探し出しかつ確認するために、アレイ沿いに隣接する光ファイバポイントセンサから受け取られた信号の間の遅延を測定し、かつそれらの信号を、それらの光ファイバポイントセンサを結び付ける分散光ファイバアレイからの信号と結合することによって分析される。
【0020】
本発明の実施形態を、単に例として、本発明による光ファイバ周辺部監視システムを概略で示す添付の図面を参照して説明する。
【発明を実施するための最良の形態】
【0021】
図1では、本発明による光ファイバ周辺部監視システムが、10によって全体的に示されている。システム10は、一連の光ファイバポイントセンサ16A、16B、16C、16D、...、16Nを含み、これら一連の光ファイバポイントセンサは、一連の分散光ファイバセンサ18B、18C、18D、...、18Nによって光学的に結び付けられて、光ファイバセンサアレイ15を形成する。データリンク14が、受振器16Aを質問ユニット12に結合する。データリンク14は、ある長さの光ファイバであることが可能であり、したがって、光信号が質問ユニット12に送られ、または代替として、リンク14は、光信号を電気信号に変換する検出器と、質問ユニット12への固定の電気リンク、または無線リンクとを含むことが可能である。
【0022】
分散光ファイバセンサ18B、18C、18D、...、18Nは、それぞれ、100mの物理的長さを有する。アレイ15には250個の受振器が存在し、したがって、受振器16A、16Nの離隔は、最大でおよそ24.9kmであることが可能である。
【0023】
受振器16A、16B、16C、16D、...、16Nそれぞれは、曲げディスクに巻かれたおよそ100mの光ファイバを含み、ファイバに生じたひずみを介して、加速および変位を測定することができる。分散センサ18B、18C、18D、...、18Nそれぞれは、ケーブル内にひとまとめにされた100mの光ファイバを含み、やはり、ファイバに生じたひずみを介して、ケーブルにかかる圧力、またはケーブルの曲げを測定することができる。
【0024】
アレイ15は、任意の所望される構成で配置することができ、例えば、アレイ15は、例えば、建造物のための周辺部監視を提供するように、閉じた経路のまわりに配置されることができ、代替として、アレイ15は、アレイ15によって範囲が定められた直線を横切る人/物体の位置に関する情報を提供するように、直線の形に配置されてもよい。
【0025】
システム10は、以下のとおり動作する。個人または物体が、アレイ15が上に、または下に位置付けられている線または周辺部を横切ると、その個人または物体の重量に起因する力(加えて、場合により、衝撃が存在する場合、運動量の変化に起因する力も)が、センサアレイに印加される。これにより、人/物体が横切った場所に対応する分散光ファイバセンサ内の放射が、反射されて受振器16Aに戻り、およその場所を与える対応する信号が、質問ユニット12に送られる。より詳細には、質問ユニット12は、横断が、アレイ15の全長上のどこかで生じたことを識別することができる。また、放射は、分散センサの両側の受振器からも反射されて戻り、対応する信号が、やはり質問ユニット12に送られる。質問ユニット12は、分散センサ、およびセンサの両側の受振器から受け取られた信号の三角測量を実行して、信号が受け取られた時刻に基づき、人/物体が横切ったアレイ15に沿った場所を正確に決定する。両方のタイプのセンサからのデータを使用することにより、1つのタイプのセンサだけの使用を介して実現可能であるよりも、人/物体のはるかに正確な分類を提供することが可能である。向上した分類により、より低い誤認警報率がもたらされる。
【0026】
例示的なシステム10では、ポイント光ファイバセンサは、受振器であるが、他のタイプの光ファイバポイントセンサを使用してもよい。
【0027】
ポイントセンサ、および分散センサの数は、監視されることが所望される周辺部または経路の長さと、侵入者イベントを位置特定することが所望される精度の両方に応じて、異なることが可能である。本発明の最も単純な光ファイバセンサは、それぞれの側にポイントセンサを有する単一の分散センサを含む。
【0028】
地表に設置された光ファイバ加速度計を使用して、歩いている人を検出する範囲が、ある地表タイプでは、>30mであることが可能であるとすると、例えば、40m間隔で配置された加速度計のアレイにより、周辺部が完全にカバーされることが確実になる。
【0029】
隣接する加速度計で受け取られた信号を比較して、信号上の共通の特徴間における時間差を測定することにより、間隙のファイバの全長に沿った侵入の位置を正確に計算することが可能である。
【0030】
加速度計信号、および分散間隙検出ケーブルから受け取られた信号のさらなる時間的分析および頻度分析により、侵入分類が可能になり、それによってシステム誤認警報率が低減される。
【0031】
適切には、知られている距離は、20mから50mまでの範囲内である。知られている距離とは、光ファイバセンサの物理的分離を指し、各センサ間の光ファイバの光路長、および各加速度計内で使用されるファイバの長さによって規定される。
【図面の簡単な説明】
【0032】
【図1】本発明による光ファイバ周辺部監視システムを示す。
【特許請求の範囲】
【請求項1】
監視システム(10)のための光ファイバセンサアレイ(15)であって、該光ファイバセンサアレイが、少なくとも2つの光ファイバポイントセンサ(16)を含み、連続する光ファイバポイントセンサ(16)の各ペアが、分散光ファイバセンサ(18)によって結び付けられることを特徴とする光ファイバセンサアレイ(15)。
【請求項2】
光ファイバ監視システム(10)であって、該光ファイバ監視システム(10)が、質問システム(12)に接続された請求項1に記載の光ファイバセンサアレイ(15)を含み、前記質問システム(12)が、光ファイバセンサアレイ(15)の少なくとも1つのセンサに印加された力に起因する、光ファイバセンサアレイ(15)の少なくとも1つのセンサにおける光位相偏位に応答し、かつ前記力が印加された位置を確定するように構成されることを特徴とする光ファイバ監視システム(10)。
【請求項3】
光ファイバセンサアレイが、光ファイバケーブルによって質問システムに接続される、請求項2に記載の光ファイバ監視システム。
【請求項4】
光ファイバセンサアレイが、トランスデューサおよびワイヤケーブルによって質問システムに接続される、請求項2に記載の光ファイバ監視システム。
【請求項5】
光ファイバポイントセンサが、曲げディスクに巻かれた光ファイバを含む、請求項2に記載の光ファイバ監視システム。
【請求項6】
光ファイバポイントセンサが、受振器である、請求項2に記載の光ファイバ監視システム。
【請求項7】
各光ファイバポイントセンサが、光ファイバ加速度計を含む、請求項2に記載の光ファイバ監視システム。
【請求項8】
分散光ファイバセンサが、ケーブルにかかる圧力、またはケーブルの曲げを測定するケーブル内の光ファイバパッケージを含む、請求項2に記載の光ファイバ監視システム。
【請求項9】
質問システムが、干渉計質問システムを含む、請求項2に記載のシステム。
【請求項10】
干渉計質問システムが、反射光測定の干渉計質問システムを含む、請求項9に記載のシステム。
【請求項11】
反射光測定の干渉計質問システムが、パルス反射光測定の干渉計質問システムを含む、請求項10に記載のシステム。
【請求項12】
パルス反射光測定の干渉計質問システムが、時間分割多重化を使用して個々のセンサを区別する、請求項11に記載のシステム。
【請求項13】
質問システムが、レイリー後方散乱の質問システムを含む、請求項2に記載のシステム。
【請求項14】
レイリー後方散乱の質問システムが、パルスレイリー後方散乱の質問システムを含む、請求項13に記載のシステム。
【請求項15】
表面上を移動する物体が、表面上の閉じた経路または固定長の開いた経路を横切る位置を確定する方法であって、
(i)請求項1に記載のセンサを、前記経路の上にまたは前記経路の下に位置付けるステップと、
(ii)センサから受け取られた光信号を分析して、経路に沿った物体の位置、または物体が前記経路を横切った位置を確定するステップとを含むことを特徴とする方法。
【請求項16】
光信号が、前記位置を探し出しかつ確認するために、アレイ沿いに隣接する光ファイバポイントセンサから受け取られた信号の間の遅延を測定し、かつ前記信号を、光ファイバポイントセンサを結び付ける分散光ファイバアレイからの信号と結合することによって分析される、請求項15に記載の方法。
【請求項1】
監視システム(10)のための光ファイバセンサアレイ(15)であって、該光ファイバセンサアレイが、少なくとも2つの光ファイバポイントセンサ(16)を含み、連続する光ファイバポイントセンサ(16)の各ペアが、分散光ファイバセンサ(18)によって結び付けられることを特徴とする光ファイバセンサアレイ(15)。
【請求項2】
光ファイバ監視システム(10)であって、該光ファイバ監視システム(10)が、質問システム(12)に接続された請求項1に記載の光ファイバセンサアレイ(15)を含み、前記質問システム(12)が、光ファイバセンサアレイ(15)の少なくとも1つのセンサに印加された力に起因する、光ファイバセンサアレイ(15)の少なくとも1つのセンサにおける光位相偏位に応答し、かつ前記力が印加された位置を確定するように構成されることを特徴とする光ファイバ監視システム(10)。
【請求項3】
光ファイバセンサアレイが、光ファイバケーブルによって質問システムに接続される、請求項2に記載の光ファイバ監視システム。
【請求項4】
光ファイバセンサアレイが、トランスデューサおよびワイヤケーブルによって質問システムに接続される、請求項2に記載の光ファイバ監視システム。
【請求項5】
光ファイバポイントセンサが、曲げディスクに巻かれた光ファイバを含む、請求項2に記載の光ファイバ監視システム。
【請求項6】
光ファイバポイントセンサが、受振器である、請求項2に記載の光ファイバ監視システム。
【請求項7】
各光ファイバポイントセンサが、光ファイバ加速度計を含む、請求項2に記載の光ファイバ監視システム。
【請求項8】
分散光ファイバセンサが、ケーブルにかかる圧力、またはケーブルの曲げを測定するケーブル内の光ファイバパッケージを含む、請求項2に記載の光ファイバ監視システム。
【請求項9】
質問システムが、干渉計質問システムを含む、請求項2に記載のシステム。
【請求項10】
干渉計質問システムが、反射光測定の干渉計質問システムを含む、請求項9に記載のシステム。
【請求項11】
反射光測定の干渉計質問システムが、パルス反射光測定の干渉計質問システムを含む、請求項10に記載のシステム。
【請求項12】
パルス反射光測定の干渉計質問システムが、時間分割多重化を使用して個々のセンサを区別する、請求項11に記載のシステム。
【請求項13】
質問システムが、レイリー後方散乱の質問システムを含む、請求項2に記載のシステム。
【請求項14】
レイリー後方散乱の質問システムが、パルスレイリー後方散乱の質問システムを含む、請求項13に記載のシステム。
【請求項15】
表面上を移動する物体が、表面上の閉じた経路または固定長の開いた経路を横切る位置を確定する方法であって、
(i)請求項1に記載のセンサを、前記経路の上にまたは前記経路の下に位置付けるステップと、
(ii)センサから受け取られた光信号を分析して、経路に沿った物体の位置、または物体が前記経路を横切った位置を確定するステップとを含むことを特徴とする方法。
【請求項16】
光信号が、前記位置を探し出しかつ確認するために、アレイ沿いに隣接する光ファイバポイントセンサから受け取られた信号の間の遅延を測定し、かつ前記信号を、光ファイバポイントセンサを結び付ける分散光ファイバアレイからの信号と結合することによって分析される、請求項15に記載の方法。
【図1】

【公表番号】特表2007−506960(P2007−506960A)
【公表日】平成19年3月22日(2007.3.22)
【国際特許分類】
【出願番号】特願2006−527475(P2006−527475)
【出願日】平成16年9月24日(2004.9.24)
【国際出願番号】PCT/GB2004/004076
【国際公開番号】WO2005/031270
【国際公開日】平成17年4月7日(2005.4.7)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
【公表日】平成19年3月22日(2007.3.22)
【国際特許分類】
【出願日】平成16年9月24日(2004.9.24)
【国際出願番号】PCT/GB2004/004076
【国際公開番号】WO2005/031270
【国際公開日】平成17年4月7日(2005.4.7)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
[ Back to top ]