
光位相差検出式の物体検知センサ
【課題】
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知領域の一端に設置され、その検知領域における物体の有無を検知する光位相差検出式の物体検知センサに関する。
【背景技術】
【0002】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して、被検知物体までの距離を測定している。これは、上記位相差が被検知物体との距離に比例することを利用したものである。そのため、光位相差検出式センサは、原理的に温度等の影響を受けにくく、被検知物体の色の変化にも強い。
【0003】
しかし、電気回路の温度ドリフトにより、距離測定値が変動するため、数センチ単位の距離変動を検出することは困難である。光位相差検出式の距離測定装置において、レーザーダイオードの発光強度が温度により変化してしまう問題の対策として、温度測定記憶手段と各温度に対する温度補正係数を用いて、距離計測能力を補正することも考えられていた(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−325537号公報
【0005】
【特許文献2】特開平09−318737号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、この方法では、温度測定手段、温度記憶手段等が必要となり、構造が複雑となる。また、各温度に対する温度補正係数を決めなければならず、そのためのデータ採取、分析、設定といった諸作業が必要となり、開発コストが増大するといった問題がある。また、温度ドリフトによる距離測定値の変動度合いは、背景(床面等)の反射率により異なることが判っており、温度補正係数は、一つに特定することはできない。
【0007】
本発明は上記問題点を解決するためになされたものであり、その目的は、回路構成や構造を複雑にすることなく、どのような場所に設置しても、数センチ単位まで正確に、物体の有無を検知することができる光位相差検出式の物体検知センサを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために本発明は、(1)検知領域における物体の有無を検知するセンサであって、検知領域に向けて検出光を投光する投光素子と、前記検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、前記検知領域内に物体が有ると判定する判定手段と、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段とを備えていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0009】
また本発明は、上記構成において、(2)前記状態補正手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値を記憶する補正値記憶手段と、判定手段からの出力が発生すると同時に、直近の時間T2の距離算出手段の抽出値を破棄する状態監視手段とを備え、前記補正値記憶手段の値を、距離算出結果とすることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0010】
また本発明は、上記構成(2)において、(3)前記状態監視手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値が記憶済みの値と比較して所定値以上の変動を含む場合にのみ記憶内容を更新することを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0011】
また本発明は、上記構成(2)において、(4)前記距離算出手段は、前記判定手段の応答速度に相当する距離計算速度と、前記判定手段の応答速度と異なる距離計算速度とを備え、前記状態補正手段は、前記2種類の距離計算速度による距離算出結果を、それぞれに設定した物体の有無を判定する判定とは異なる判定値に基づき判定し、前記補正値記憶手段の値を更新していくことを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0012】
また本発明は、上記構成(4)において、(5)判定手段の応答速度と異なる距離計算速度に基づき抽出された距離算出値が、前記補正値記憶手段の値を、大きく変化させる場合には、直近の距離算出手段の抽出値を破棄することを特徴とする光位相差検出式の物体検知センサを提供するものである。
【発明の効果】
【0013】
上記のように構成された本発明の物体検知センサによれば、通常動作時に距離測定を継続し、検出物体が存在しないと判断したときのみ、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正をおこなうので、数センチ単位まで正確に、物体の有無を検知することができる。検知領域を通過する物体(検出対象としない物体)による補正値の変動や、想定外の補正値の変動を除去する様にしたので、物体の有無検知性能を、適切に維持することができる。温度測定手段や温度記憶手段を必要としないので、回路構成、製品構造が複雑化せず、コストが抑えられる。距離算出結果に基づき補正をおこなう方式であるので、背景(床面等)の反射率により異なる温度ドリフトによる距離測定値の変動度合いの違い、個体差による距離測定値の変動度合いの違い、経年変化による距離測定値の変動、光学系の汚れによる距離測定値の変動等あらゆる変動に対応することができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の光位相差検出式の物体検知センサの構成を示すブロック図である。
【図2】図2は、本発明の光位相差検出式の物体検知センサの設置状態と動作状態を示した説明図である。
【図3】図3は状態補正手段がおこなう距離算出手段の状態抽出に関わる時間T1及びT2の説明図である。
【図4】図4は、距離算出手段の距離計算速度の違いによる、距離算出手段の状態の差を示した説明図である。
【図5】図5は、温度ドリフト以外の補正値の変動状態を示した説明図である。
【図6】図6は、本発明の光位相差検出式の物体検知センサの動作状態を示したフローチャートである。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施形態について説明する。
【実施例1】
【0016】
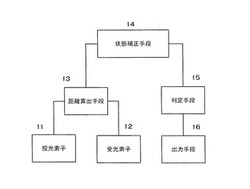
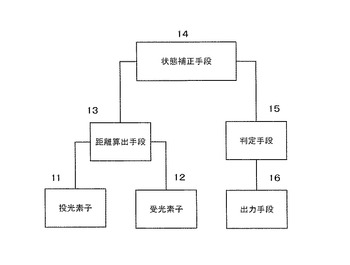
図1は、本発明の光位相差検出式の物体検知センサの構成を示すブロック図である。
物体検知センサ1内には、検出光を投光する投光素子11、検知領域からの反射光を受光して受光信号を生成する受光素子12、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段13、検知領域内に物体が有ると判定する判定手段15、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段14、検知信号を発する出力手段16を備えている。
【0017】
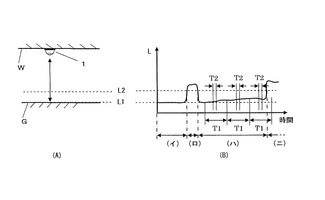
図2は、本発明の光位相差検出式の物体検知センサの設置状態と動作状態を示した説明図である。(A)は、設置状態を示す側面図であり、(B)は、距離測定結果の変動状態を、物体検出の閾値との関係を含め説明したタイムチャートである。Wは天井、Gは床であり、1は本発明の物体検知センサである。
【0018】
物体検知センサ1の真下に検知領域が形成され、投光素子11から投光された光が、対象物に当り、そこで反射して戻ってきた反射光を受光素子12で受光している。受光素子の出力をもとに受光信号を生成して、投光した光と受光した光との位相差を検出し、距離算出手段13で距離計算をおこなう。
【0019】
この種のセンサは、設置時や電源投入時に、検知領域の背景となる床面までの距離と、検知領域内の床面におかれた所定の高さの被検知物体までの距離を測定し、内部回路に記憶させる、いわゆるティーチングという操作をおこなう。ここで、床面までの距離をL1、所定の高さの被検知物体までの距離をL2とする。ティーチング時に使用する被検知物体の高さを10センチメートルとすると、それよりも大きな(10センチメートルよりも背の高い)物体が検知領域内に存在すると、物体検知センサから検知信号が発せられる様に設定される。ティーチング時に、L1を測定すると、自動的にL2が設定される様にしているものもある。
【0020】
図2(B)のタイムチャートの縦軸は、距離算出結果に対応した信号出力値であり、横軸は時間である。測定距離が短いほどプラス側に変動するように示されている。L2は、検知領域内に物体が有ると判定する判定手段の閾値である。実線は、信号を表しており、閾値L2を超えると、物体検知センサから検知信号が発せられる。時間(イ)、(ハ)は、検知物体なし、時間(ロ)、(ニ)は、検知物体ありの状態を示している。
【0021】
時間(ハ)に示されている様に、物体検知センサから床面までの距離は一定であるのにもかかわらず、距離算出結果に対応した信号出力値が変動する場合がある。これは、電気回路の温度ドリフトによるものであり、周囲温度が年中一定な特殊環境での使用を除き、不可避の問題である。
【0022】
L2を10センチメートルに相当する閾値と設定している場合、床面までの距離算出結果が温度により変動すると、背の高さが5センチメートルの物体を検知してしまったり、その反対に、背の高さが15センチメートルの物体であっても検知しなくなったりする現象が発生してしまう。特に、光位相差検出式の物体検知センサを、急病によって倒れてしまった人間の検知を目的として使用する際には、このような検出感度の変動は許されない。
【0023】
そこで、時間T1(たとえば30秒)ごとに区切り、その間の限られた時間T2(例えば1秒)の間の距離算出結果の平均値をL1´として記憶させ、このL1´を、ティーチング時に設定したL1と入れ替え、同時にこの変動分に相当するだけ判定手段の閾値L2をシフトさせるか、距離算出結果の値を変動分だけシフトさせれば、温度ドリフトに対する補正をおこなうことができると考えた。この処理は、結果として判定手段の判定値を補正することにつながる。
【0024】
タイムチャート中の、1回目、2回目のT1区間では、検出物体なしの判定であり、それぞれのT2区間の距離算出結果の平均値をL1´を補正値として採用する。3回目のT1区間では、後半において検出物体ありとなっているので、この区間のT2区間の距離算出結果の平均値は、破棄する。このような処理をおこなうことにより、検知物体ありの状態だけでなく、検知物体ありの状態へ移行する直前の不安定な距離算出結果による補正処理を回避できる。
【0025】
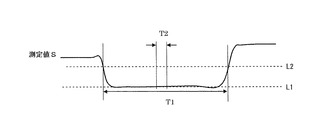
図3は状態補正手段がおこなう距離算出手段の状態抽出に関わる時間T1及びT2の状態を示した説明図である。精度良く距離算出をおこなうために、距離算出手段の状態抽出に関わる時間を長くする必要がある。この図に示すような時間T1(検知物体なしの状態の時間)を通して距離算出結果の平均を採り、補正値として採用することも考えられるが、そうすると、T1の初期と後期の部分の測定値が、床面からの距離と異なっているため、T1区間の平均値が、床面との距離の正確な補正値とはならない。これは、距離算出を、移動平均、連続一致のディレイ処理等を介して処理し、距離測定を確実にしているためである。つまり、距離算出手段から得られる信号は、応答が遅くなっているからである。正確な補正値とするための工夫として、時間T1の中に、T2を設け、T2の間の距離算出結果の平均値をとるようにしている。
【0026】
図4は、距離算出手段の距離計算速度の違いによる、距離算出手段の差を示した説明図である。距離算出を、移動平均、連続一致のディレイ処理等を介して処理し、距離測定を確実にしているために、距離算出手段から得られる信号は、応答が遅くなっているが、応答速度以上に速いスピードで物体が検知領域を横切ると、応答の速い距離算出処理を経た信号は、図4の破線に示すようになり、判定手段の判定値を超えている。距離算出手段から得られる信号は実線で示すようになり、検出物体なしの判定となるが、このときの距離算出結果の平均値は、床面との距離の正確な補正値とはならない。
【0027】
応答の速い距離算出処理を経た信号が、判定手段の判定値を超えた場合には、この間の距離算出結果の平均値は、破棄するような処理をおこなう。これにより、応答速度以上に速いスピードで横切る検知物体による誤った補正処理を回避できる。図4に示す例では、応答の速い距離算出処理の応答速度を10ms とし、距離算出手段から得られる信号の応答速度は、100msとした。
【0028】
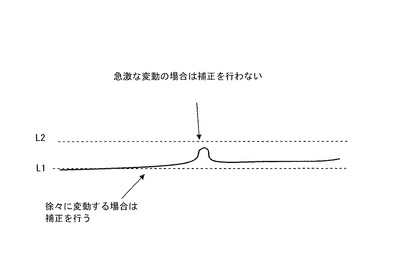
図5は、温度ドリフト以外の補正値の変動状態を示した説明図である。温度ドリフトは、検知器の周囲温度、検知器の内部回路の発熱等により発生するものであり、急激な変化を生じさせるものではない。このため図5に示すような変動は、温度ドリフト以外のいわゆる想定外の変動として、補正判定から取り除く必要がある。たとえば、1回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートル以下の変動幅である場合には、これを補正値として採用する。2回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートル以下の変動幅である場合には、これを再び補正値として採用する。これを繰り返し、N回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートルの変動幅を超える場合には、N回目のT1区間内のT2区間の距離算出結果の平均値は、破棄する。このような処理をおこなうことにより温度ドリフト以外の補正値の変動を除去することができる。
【0029】
次に、本発明の光位相差検出式の物体検知センサの動作を、電源投入から順を追って説明する。ここでは、距離算出結果の値を変動分だけシフトさせ、温度ドリフトに対する補正をおこなう方式について説明する。電源をオンすると、ティーチングを開始し、L1の値を設定する。L1の値は、検知器から背景となる床面までの距離である。続いて、L2の値が設定される。高さ10センチメートル以上の物体を検知する様にするため、L2は、L1よりも10センチメートルだけ小さな値に設定される。これらの設定が完了すると、距離算出手段の出力の監視を開始する。図6は、本発明の光位相差検出式の物体検知センサの動作状態を示したフローチャートであり、ティーチング終了後の動作状態を示している。
【0030】
ステップS001で距離算出手段の出力の監視を開始し、ステップS002では、判定手段の応答速度に相当する距離計算速度に基づき距離データを計算する。そして、その平均化処理を行い、その結果D1を一時的に記憶する。ステップS003では、判定手段の応答速度よりも速い距離計算速度に基づき距離データを計算し、その平均化処理を行い、その結果D2を一時的に記憶する。ステップS004では、D1の値がL3の値を下回っているかどうかを監視し、下回っておれば、ステップS005に進む。L3は、物体の有無を判定する判定値L2とは異なる値であり、ドリフト補正要否を判定する判定閾値である。
【0031】
ステップS005では、D2の値がL4の値を下回っているかどうか監視し、下回っておれば、ステップS006に進む。L4は、物体の有無を判定する判定値L2とは異なる判定値であり、L3の値の60%から70%の大きさに設定されたドリフト補正要否を判定する判定閾値である。ステップS006では、時間計測用のカウンタをインクリメントする。ステップS004とステップS005で、D1の値とD2の値がそれぞれの判定閾値以上となった場合には、ステップS012で、時間計測用のカウンタをリセットし、時間計測をゼロ秒に戻す。
【0032】
ステップS007では、カウンタの値がゼロであるかどうかを監視し、ゼロであれば、ステップS013に進み、補正用データD3をゼロにリセットする。D3は、平均化処理された距離データとL1の値との差に相当する値であり、補正用データとして平均化されて記憶されている。ステップS007で、カウンタの値がゼロでなければ、ステップS008へ進み、カウンタの値がTaよりも大きくTbよりも小さいかどうか(時間T2であるか)が判定される。カウンタの値がこの範囲に入っていると、ステップS014に進み、補正用データD3を平均化し、記憶する。カウンタの値がこの範囲に入っていなければ、ステップS009に進む。ステップS009では、カウンタの値がT1を超えたかどうかを監視し、超えたら、ドリフト補正値Dhを補正用データD3に更新し、カウンタ値をゼロにリセットする。
【0033】
カウンタの値がT1を超えていなければ、ステップS010へ進み、補正距離データDが演算される。補正距離データDは、距離データD1、距離データD2のどちらかの値を基に演算される。そして、ステップS011で補正距離データを基に出力判定がおこなわれる。以上のステップS001からステップS011までの一連の動作を、約7mSで実行する。ステップS001とステップS002で実行される距離データの平均化処理は、10回分(約70mS)のデータの平均値を計算し順次更新して一時的に記憶している。時間T1の間、継続して、D1とD2がドリフト補正判定閾値を下回っていれば、その間の時間T2に取得した補正用データD3を、ドリフト補正値Dhとして順次更新し続けることになる。
【0034】
図6のフローチャートに示した実施例は、温度ドリフトが発生していない状況下でも、ドリフト補正値Dhを更新し続けるものであるが、補正用データD3が、所定の値に満たない場合には、ドリフト補正をしないというステップを組み込んで、所定値以上の温度ドリフトのみを補正対象としても本発明の効果は発揮される。
【産業上の利用可能性】
【0035】
本発明は、光位相差検出式の物体検知センサだけでなく、超音波を用いた距離測定装置他、ティーチング操作を伴い物体検知を行う装置にて利用することができる。
【符号の説明】
【0036】
1 光位相差検出式の物体検知センサ
11 投光素子
12 受光素子
13 距離検出手段
14 状態補正手段
15 判定手段
16 出力手段
L1 ティーチングにて記憶した背景までの距離
L2 検知領域内に物体が有ると判定する距離
W 天井
G 床
【技術分野】
【0001】
本発明は、検知領域の一端に設置され、その検知領域における物体の有無を検知する光位相差検出式の物体検知センサに関する。
【背景技術】
【0002】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して、被検知物体までの距離を測定している。これは、上記位相差が被検知物体との距離に比例することを利用したものである。そのため、光位相差検出式センサは、原理的に温度等の影響を受けにくく、被検知物体の色の変化にも強い。
【0003】
しかし、電気回路の温度ドリフトにより、距離測定値が変動するため、数センチ単位の距離変動を検出することは困難である。光位相差検出式の距離測定装置において、レーザーダイオードの発光強度が温度により変化してしまう問題の対策として、温度測定記憶手段と各温度に対する温度補正係数を用いて、距離計測能力を補正することも考えられていた(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−325537号公報
【0005】
【特許文献2】特開平09−318737号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、この方法では、温度測定手段、温度記憶手段等が必要となり、構造が複雑となる。また、各温度に対する温度補正係数を決めなければならず、そのためのデータ採取、分析、設定といった諸作業が必要となり、開発コストが増大するといった問題がある。また、温度ドリフトによる距離測定値の変動度合いは、背景(床面等)の反射率により異なることが判っており、温度補正係数は、一つに特定することはできない。
【0007】
本発明は上記問題点を解決するためになされたものであり、その目的は、回路構成や構造を複雑にすることなく、どのような場所に設置しても、数センチ単位まで正確に、物体の有無を検知することができる光位相差検出式の物体検知センサを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために本発明は、(1)検知領域における物体の有無を検知するセンサであって、検知領域に向けて検出光を投光する投光素子と、前記検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、前記検知領域内に物体が有ると判定する判定手段と、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段とを備えていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0009】
また本発明は、上記構成において、(2)前記状態補正手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値を記憶する補正値記憶手段と、判定手段からの出力が発生すると同時に、直近の時間T2の距離算出手段の抽出値を破棄する状態監視手段とを備え、前記補正値記憶手段の値を、距離算出結果とすることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0010】
また本発明は、上記構成(2)において、(3)前記状態監視手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値が記憶済みの値と比較して所定値以上の変動を含む場合にのみ記憶内容を更新することを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0011】
また本発明は、上記構成(2)において、(4)前記距離算出手段は、前記判定手段の応答速度に相当する距離計算速度と、前記判定手段の応答速度と異なる距離計算速度とを備え、前記状態補正手段は、前記2種類の距離計算速度による距離算出結果を、それぞれに設定した物体の有無を判定する判定とは異なる判定値に基づき判定し、前記補正値記憶手段の値を更新していくことを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0012】
また本発明は、上記構成(4)において、(5)判定手段の応答速度と異なる距離計算速度に基づき抽出された距離算出値が、前記補正値記憶手段の値を、大きく変化させる場合には、直近の距離算出手段の抽出値を破棄することを特徴とする光位相差検出式の物体検知センサを提供するものである。
【発明の効果】
【0013】
上記のように構成された本発明の物体検知センサによれば、通常動作時に距離測定を継続し、検出物体が存在しないと判断したときのみ、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正をおこなうので、数センチ単位まで正確に、物体の有無を検知することができる。検知領域を通過する物体(検出対象としない物体)による補正値の変動や、想定外の補正値の変動を除去する様にしたので、物体の有無検知性能を、適切に維持することができる。温度測定手段や温度記憶手段を必要としないので、回路構成、製品構造が複雑化せず、コストが抑えられる。距離算出結果に基づき補正をおこなう方式であるので、背景(床面等)の反射率により異なる温度ドリフトによる距離測定値の変動度合いの違い、個体差による距離測定値の変動度合いの違い、経年変化による距離測定値の変動、光学系の汚れによる距離測定値の変動等あらゆる変動に対応することができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の光位相差検出式の物体検知センサの構成を示すブロック図である。
【図2】図2は、本発明の光位相差検出式の物体検知センサの設置状態と動作状態を示した説明図である。
【図3】図3は状態補正手段がおこなう距離算出手段の状態抽出に関わる時間T1及びT2の説明図である。
【図4】図4は、距離算出手段の距離計算速度の違いによる、距離算出手段の状態の差を示した説明図である。
【図5】図5は、温度ドリフト以外の補正値の変動状態を示した説明図である。
【図6】図6は、本発明の光位相差検出式の物体検知センサの動作状態を示したフローチャートである。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の実施形態について説明する。
【実施例1】
【0016】
図1は、本発明の光位相差検出式の物体検知センサの構成を示すブロック図である。
物体検知センサ1内には、検出光を投光する投光素子11、検知領域からの反射光を受光して受光信号を生成する受光素子12、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段13、検知領域内に物体が有ると判定する判定手段15、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段14、検知信号を発する出力手段16を備えている。
【0017】
図2は、本発明の光位相差検出式の物体検知センサの設置状態と動作状態を示した説明図である。(A)は、設置状態を示す側面図であり、(B)は、距離測定結果の変動状態を、物体検出の閾値との関係を含め説明したタイムチャートである。Wは天井、Gは床であり、1は本発明の物体検知センサである。
【0018】
物体検知センサ1の真下に検知領域が形成され、投光素子11から投光された光が、対象物に当り、そこで反射して戻ってきた反射光を受光素子12で受光している。受光素子の出力をもとに受光信号を生成して、投光した光と受光した光との位相差を検出し、距離算出手段13で距離計算をおこなう。
【0019】
この種のセンサは、設置時や電源投入時に、検知領域の背景となる床面までの距離と、検知領域内の床面におかれた所定の高さの被検知物体までの距離を測定し、内部回路に記憶させる、いわゆるティーチングという操作をおこなう。ここで、床面までの距離をL1、所定の高さの被検知物体までの距離をL2とする。ティーチング時に使用する被検知物体の高さを10センチメートルとすると、それよりも大きな(10センチメートルよりも背の高い)物体が検知領域内に存在すると、物体検知センサから検知信号が発せられる様に設定される。ティーチング時に、L1を測定すると、自動的にL2が設定される様にしているものもある。
【0020】
図2(B)のタイムチャートの縦軸は、距離算出結果に対応した信号出力値であり、横軸は時間である。測定距離が短いほどプラス側に変動するように示されている。L2は、検知領域内に物体が有ると判定する判定手段の閾値である。実線は、信号を表しており、閾値L2を超えると、物体検知センサから検知信号が発せられる。時間(イ)、(ハ)は、検知物体なし、時間(ロ)、(ニ)は、検知物体ありの状態を示している。
【0021】
時間(ハ)に示されている様に、物体検知センサから床面までの距離は一定であるのにもかかわらず、距離算出結果に対応した信号出力値が変動する場合がある。これは、電気回路の温度ドリフトによるものであり、周囲温度が年中一定な特殊環境での使用を除き、不可避の問題である。
【0022】
L2を10センチメートルに相当する閾値と設定している場合、床面までの距離算出結果が温度により変動すると、背の高さが5センチメートルの物体を検知してしまったり、その反対に、背の高さが15センチメートルの物体であっても検知しなくなったりする現象が発生してしまう。特に、光位相差検出式の物体検知センサを、急病によって倒れてしまった人間の検知を目的として使用する際には、このような検出感度の変動は許されない。
【0023】
そこで、時間T1(たとえば30秒)ごとに区切り、その間の限られた時間T2(例えば1秒)の間の距離算出結果の平均値をL1´として記憶させ、このL1´を、ティーチング時に設定したL1と入れ替え、同時にこの変動分に相当するだけ判定手段の閾値L2をシフトさせるか、距離算出結果の値を変動分だけシフトさせれば、温度ドリフトに対する補正をおこなうことができると考えた。この処理は、結果として判定手段の判定値を補正することにつながる。
【0024】
タイムチャート中の、1回目、2回目のT1区間では、検出物体なしの判定であり、それぞれのT2区間の距離算出結果の平均値をL1´を補正値として採用する。3回目のT1区間では、後半において検出物体ありとなっているので、この区間のT2区間の距離算出結果の平均値は、破棄する。このような処理をおこなうことにより、検知物体ありの状態だけでなく、検知物体ありの状態へ移行する直前の不安定な距離算出結果による補正処理を回避できる。
【0025】
図3は状態補正手段がおこなう距離算出手段の状態抽出に関わる時間T1及びT2の状態を示した説明図である。精度良く距離算出をおこなうために、距離算出手段の状態抽出に関わる時間を長くする必要がある。この図に示すような時間T1(検知物体なしの状態の時間)を通して距離算出結果の平均を採り、補正値として採用することも考えられるが、そうすると、T1の初期と後期の部分の測定値が、床面からの距離と異なっているため、T1区間の平均値が、床面との距離の正確な補正値とはならない。これは、距離算出を、移動平均、連続一致のディレイ処理等を介して処理し、距離測定を確実にしているためである。つまり、距離算出手段から得られる信号は、応答が遅くなっているからである。正確な補正値とするための工夫として、時間T1の中に、T2を設け、T2の間の距離算出結果の平均値をとるようにしている。
【0026】
図4は、距離算出手段の距離計算速度の違いによる、距離算出手段の差を示した説明図である。距離算出を、移動平均、連続一致のディレイ処理等を介して処理し、距離測定を確実にしているために、距離算出手段から得られる信号は、応答が遅くなっているが、応答速度以上に速いスピードで物体が検知領域を横切ると、応答の速い距離算出処理を経た信号は、図4の破線に示すようになり、判定手段の判定値を超えている。距離算出手段から得られる信号は実線で示すようになり、検出物体なしの判定となるが、このときの距離算出結果の平均値は、床面との距離の正確な補正値とはならない。
【0027】
応答の速い距離算出処理を経た信号が、判定手段の判定値を超えた場合には、この間の距離算出結果の平均値は、破棄するような処理をおこなう。これにより、応答速度以上に速いスピードで横切る検知物体による誤った補正処理を回避できる。図4に示す例では、応答の速い距離算出処理の応答速度を10ms とし、距離算出手段から得られる信号の応答速度は、100msとした。
【0028】
図5は、温度ドリフト以外の補正値の変動状態を示した説明図である。温度ドリフトは、検知器の周囲温度、検知器の内部回路の発熱等により発生するものであり、急激な変化を生じさせるものではない。このため図5に示すような変動は、温度ドリフト以外のいわゆる想定外の変動として、補正判定から取り除く必要がある。たとえば、1回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートル以下の変動幅である場合には、これを補正値として採用する。2回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートル以下の変動幅である場合には、これを再び補正値として採用する。これを繰り返し、N回目のT1区間内のT2区間の距離算出結果の平均値L1´が、それ以前の距離算出結果と比較して、床面の距離換算で5センチメートルの変動幅を超える場合には、N回目のT1区間内のT2区間の距離算出結果の平均値は、破棄する。このような処理をおこなうことにより温度ドリフト以外の補正値の変動を除去することができる。
【0029】
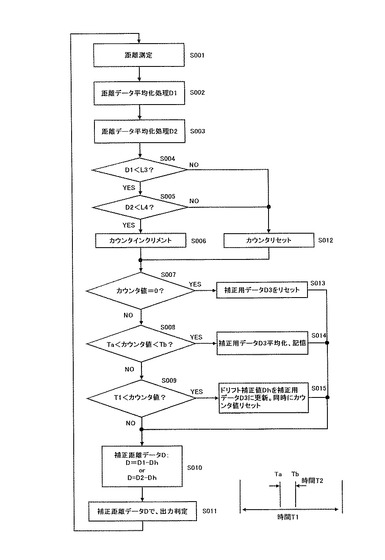
次に、本発明の光位相差検出式の物体検知センサの動作を、電源投入から順を追って説明する。ここでは、距離算出結果の値を変動分だけシフトさせ、温度ドリフトに対する補正をおこなう方式について説明する。電源をオンすると、ティーチングを開始し、L1の値を設定する。L1の値は、検知器から背景となる床面までの距離である。続いて、L2の値が設定される。高さ10センチメートル以上の物体を検知する様にするため、L2は、L1よりも10センチメートルだけ小さな値に設定される。これらの設定が完了すると、距離算出手段の出力の監視を開始する。図6は、本発明の光位相差検出式の物体検知センサの動作状態を示したフローチャートであり、ティーチング終了後の動作状態を示している。
【0030】
ステップS001で距離算出手段の出力の監視を開始し、ステップS002では、判定手段の応答速度に相当する距離計算速度に基づき距離データを計算する。そして、その平均化処理を行い、その結果D1を一時的に記憶する。ステップS003では、判定手段の応答速度よりも速い距離計算速度に基づき距離データを計算し、その平均化処理を行い、その結果D2を一時的に記憶する。ステップS004では、D1の値がL3の値を下回っているかどうかを監視し、下回っておれば、ステップS005に進む。L3は、物体の有無を判定する判定値L2とは異なる値であり、ドリフト補正要否を判定する判定閾値である。
【0031】
ステップS005では、D2の値がL4の値を下回っているかどうか監視し、下回っておれば、ステップS006に進む。L4は、物体の有無を判定する判定値L2とは異なる判定値であり、L3の値の60%から70%の大きさに設定されたドリフト補正要否を判定する判定閾値である。ステップS006では、時間計測用のカウンタをインクリメントする。ステップS004とステップS005で、D1の値とD2の値がそれぞれの判定閾値以上となった場合には、ステップS012で、時間計測用のカウンタをリセットし、時間計測をゼロ秒に戻す。
【0032】
ステップS007では、カウンタの値がゼロであるかどうかを監視し、ゼロであれば、ステップS013に進み、補正用データD3をゼロにリセットする。D3は、平均化処理された距離データとL1の値との差に相当する値であり、補正用データとして平均化されて記憶されている。ステップS007で、カウンタの値がゼロでなければ、ステップS008へ進み、カウンタの値がTaよりも大きくTbよりも小さいかどうか(時間T2であるか)が判定される。カウンタの値がこの範囲に入っていると、ステップS014に進み、補正用データD3を平均化し、記憶する。カウンタの値がこの範囲に入っていなければ、ステップS009に進む。ステップS009では、カウンタの値がT1を超えたかどうかを監視し、超えたら、ドリフト補正値Dhを補正用データD3に更新し、カウンタ値をゼロにリセットする。
【0033】
カウンタの値がT1を超えていなければ、ステップS010へ進み、補正距離データDが演算される。補正距離データDは、距離データD1、距離データD2のどちらかの値を基に演算される。そして、ステップS011で補正距離データを基に出力判定がおこなわれる。以上のステップS001からステップS011までの一連の動作を、約7mSで実行する。ステップS001とステップS002で実行される距離データの平均化処理は、10回分(約70mS)のデータの平均値を計算し順次更新して一時的に記憶している。時間T1の間、継続して、D1とD2がドリフト補正判定閾値を下回っていれば、その間の時間T2に取得した補正用データD3を、ドリフト補正値Dhとして順次更新し続けることになる。
【0034】
図6のフローチャートに示した実施例は、温度ドリフトが発生していない状況下でも、ドリフト補正値Dhを更新し続けるものであるが、補正用データD3が、所定の値に満たない場合には、ドリフト補正をしないというステップを組み込んで、所定値以上の温度ドリフトのみを補正対象としても本発明の効果は発揮される。
【産業上の利用可能性】
【0035】
本発明は、光位相差検出式の物体検知センサだけでなく、超音波を用いた距離測定装置他、ティーチング操作を伴い物体検知を行う装置にて利用することができる。
【符号の説明】
【0036】
1 光位相差検出式の物体検知センサ
11 投光素子
12 受光素子
13 距離検出手段
14 状態補正手段
15 判定手段
16 出力手段
L1 ティーチングにて記憶した背景までの距離
L2 検知領域内に物体が有ると判定する距離
W 天井
G 床
【特許請求の範囲】
【請求項1】
検知領域における物体の有無を検知するセンサであって、検知領域に向けて検出光を投光する投光素子と、前記検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、前記検知領域内に物体が有ると判定する判定手段と、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段とを備えていることを特徴とする光位相差検出式の物体検知センサ。
【請求項2】
前記状態補正手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値を記憶する補正値記憶手段と、判定手段から出力が発生するのを受けて、直近の時間T2の距離算出手段の抽出値を破棄する状態監視手段とを備え、前記補正値記憶手段の値を、距離算出結果とすることを特徴とする請求項1に記載の光位相差検出式の物体検知センサ。
【請求項3】
前記状態監視手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値が記憶済みの値と比較して所定値以上の変動を含む場合にのみ記憶内容を更新することを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項4】
前記距離算出手段は、前記判定手段の応答速度に相当する距離計算速度と、前記判定手段の応答速度と異なる距離計算速度とを備え、前記状態補正手段は、前記2種類の距離計算速度による距離算出結果を、それぞれに設定した物体の有無を判定する判定とは異なる判定値に基づき判定し、前記補正値記憶手段の値を更新していくことを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項5】
判定手段の応答速度と異なる距離計算速度に基づき抽出された距離算出値が、前記補正値記憶手段の値を、大きく変化させる場合には、直近の距離算出手段の抽出値を破棄することを特徴とする請求項4に記載の光位相差検出式の物体検知センサ。
【請求項1】
検知領域における物体の有無を検知するセンサであって、検知領域に向けて検出光を投光する投光素子と、前記検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、前記検知領域内に物体が有ると判定する判定手段と、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段とを備えていることを特徴とする光位相差検出式の物体検知センサ。
【請求項2】
前記状態補正手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値を記憶する補正値記憶手段と、判定手段から出力が発生するのを受けて、直近の時間T2の距離算出手段の抽出値を破棄する状態監視手段とを備え、前記補正値記憶手段の値を、距離算出結果とすることを特徴とする請求項1に記載の光位相差検出式の物体検知センサ。
【請求項3】
前記状態監視手段は、時間T1よりも長い時間判定手段からの出力が存在していないことを受けて、その間の時間T2(T2≦T1)だけ距離算出手段の状態を抽出し、その平均値が記憶済みの値と比較して所定値以上の変動を含む場合にのみ記憶内容を更新することを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項4】
前記距離算出手段は、前記判定手段の応答速度に相当する距離計算速度と、前記判定手段の応答速度と異なる距離計算速度とを備え、前記状態補正手段は、前記2種類の距離計算速度による距離算出結果を、それぞれに設定した物体の有無を判定する判定とは異なる判定値に基づき判定し、前記補正値記憶手段の値を更新していくことを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項5】
判定手段の応答速度と異なる距離計算速度に基づき抽出された距離算出値が、前記補正値記憶手段の値を、大きく変化させる場合には、直近の距離算出手段の抽出値を破棄することを特徴とする請求項4に記載の光位相差検出式の物体検知センサ。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−21822(P2012−21822A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−158312(P2010−158312)
【出願日】平成22年7月12日(2010.7.12)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月12日(2010.7.12)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
[ Back to top ]