
光反射装置
【課題】検出光を広範囲にわたって均一に照射することができる光学系を簡易な構造で実現することが可能な光反射装置を提供する。
【解決手段】平行光出力部900は、本体部23と、本体部23に設けられ、放物曲面21の内面21aに小さい平面鏡22を多数並べた反射鏡20と、を備えている。この反射鏡20は、放物曲面の一部のみを用いた楕円形状であり、焦点fを有する。レーザ光L8が反射鏡20の平面鏡22で反射したレーザ光L2a,L2b,L2cを含むレーザ光L2は、所定の照射範囲を照射する。反射鏡20の焦点fは、オフセットされた位置に存在する。
【解決手段】平行光出力部900は、本体部23と、本体部23に設けられ、放物曲面21の内面21aに小さい平面鏡22を多数並べた反射鏡20と、を備えている。この反射鏡20は、放物曲面の一部のみを用いた楕円形状であり、焦点fを有する。レーザ光L8が反射鏡20の平面鏡22で反射したレーザ光L2a,L2b,L2cを含むレーザ光L2は、所定の照射範囲を照射する。反射鏡20の焦点fは、オフセットされた位置に存在する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、入射された光を反射する光反射装置に関するものであり、より詳しくは、入射される拡散光を反射してその反射光を平行光とする光反射装置に関するものである。本発明は、検出対象面に検出光を反射させて反射率を検出する反射率検出装置に適用可能であり、より具体的には、例えば浄水場や河川、湖沼等の水面の油膜を検出する油膜検出装置に適用可能である。
【背景技術】
【0002】
油膜による光の反射率が水面による光の反射率よりも高いことに着目し、水面に光を照射してその反射光の強度を測定することで反射率を求め、これによって水面での油膜の有無を検出するという油膜検出方法が知られている。この方法を用いた装置としては、例えば特許文献1〜6に記載された油膜検出装置が知られている。これらの油膜検出装置での課題は、一般的に、水面の状態(水位の変動や波立ち、浮遊物の有無等)に影響されることなく、広範囲にわたって面積の小さな油膜であっても検出できることである。
【0003】
具体的に説明すると、固定されている光源からのレーザ光等の検出光の水面に対する照射角度が一定である場合には、水位の変動や波立ち等が生じると、光源と水面との間の距離や反射光の方向が変わる。そのために、水面からの反射光が十分に受光部に受光されず、油膜の検出が困難になる。そのための対策としては、受光部自体を大型化したり受光部に集光するためのミラーを大型化したりして水面からの反射光を受光する受光面積を増やすことが考えられる。しかしながら、そのような対策では、油膜検出装置全体の大型化が避けられず、広い設置面積が必要となること等によって好ましくない。このような対策に代わるものとして、従来から検出光の照射範囲を広くすることを目的として種々の技術が提案されている。
【0004】
例えば特許文献1及び特許文献2には、光源から水面に照射されるレーザ光の角度を機械的手段により一定周期で変化させる油膜検出装置が開示されている。
特許文献3には、光源からの光を凹レンズにより発散ビームとして水面に照射し、その反射光を回帰性のリフレクタにより反射させたときの水面からの再反射光を凹レンズを介して検出するようにした光学系を備えた油膜検出装置が開示されている。
特許文献4には、光源からのレーザ光を走査する回転ミラーとその周囲に配置された複数の反射ミラーとを備えた油膜検知器が開示されている。すなわち、これらの反射ミラーによりレーザ光を水面に対して複数方向から交差的に走査することにより、大口径の放物ミラー等を用いずに、あらゆる方向の波立ちや水面の角度に対して安定した受光を可能にするものである。
特許文献5には、複数の光源を環状に配置して水面にレーザ光を照射し、これらの反射光を受光することによって水面の波立ちや浮遊物の影響を低減する油膜検知器が開示されている。
特許文献6には、レーザ光の照射方向を可変とする振動式又は固定式ミラーを設け、これらのミラーを介した水面からの反射光を受光することにより、水面の波立ちや浮遊物の影響を低減する油膜検知器が開示されている。
【0005】
【特許文献1】特開2001−153800号公報
【特許文献2】特開2003−149146号公報
【特許文献3】特開2005−24414号公報
【特許文献4】特開平10−90177号公報
【特許文献5】特開平10−213541号公報
【特許文献6】特開2003−149134号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの技術においては、構造や駆動機構が複雑化したり検出光の照射範囲が十分でなかったりするという問題があった。
このような状況下で、従来とは異なる新しい光学系が望まれている。すなわち、油膜検出装置の設計の際には、諸条件に応じて光学系を選択することから、従来とは異なる光学系が提供できれば、設計の際の選択肢が増え、諸条件に応じてより適切な光学系を選択することが可能になる。
【0007】
本発明は、検出光を広範囲にわたって均一に照射することができる光学系を簡易な構造で実現することが可能な光反射装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明が適用される光反射装置は、入射した光を反射して反射光を出力する光反射装置であって、装置本体と、前記装置本体に設けられ、焦点を有する放物面の内面側に反射面を有する凹面鏡と、を含み、前記凹面鏡の前記反射面は、当該凹面鏡よりも小寸の平面鏡を複数配列して構成され、前記凹面鏡の焦点を通って入射した光が前記平面鏡で反射した反射光は、所定の照射範囲を有する平行光であることを特徴とするものである。
【0009】
ここで、前記凹面鏡の焦点は、反射光が通過する領域以外の領域に位置することを特徴とすることができる。
【発明の効果】
【0010】
本発明によれば、検出光を広範囲にわたって均一に照射することができる光学系を、本発明を適用しない場合に比べて簡易な構造で実現することが可能になる。
【発明を実施するための最良の形態】
【0011】
以下、添付図面を参照して、本発明の実施の形態について詳細に説明する。
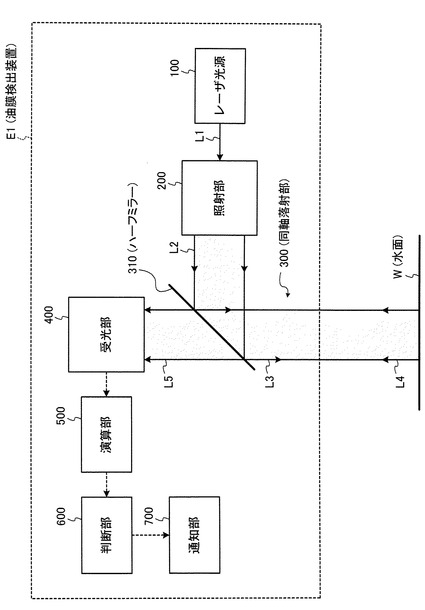
図1は、本実施の形態に係る光反射装置を適用する油膜検出装置E1の構成例を示すブロック図である。
同図に示す油膜検出装置E1は、液面に油膜が存在するときの光の反射率と存在しないときの光の反射率とが違うという性質を利用して、検出対象面である水面Wに油膜があるか否かを検出する装置である。この水面Wとしては、例えば浄水場や河川、湖沼等の水面を指すものであり、水面Wの位置が高くなったり低くなったり、また、水面Wが波立ったりするものである。
【0012】
この油膜検出装置E1は、レーザ光L1を発光する発光手段の一例としてのレーザ光源100と、レーザ光源100により発光されたレーザ光L1が所定の範囲を照射するように作用する第1の光学系の一例としての照射部200と、を備えている。更に説明すると、照射部200は、レーザ光L1を走査することにより所定の範囲を照射するレーザ光L2を出力する。レーザ光L2は、レーザ光L2の光路上流側の横断面積と光路下流側の横断面積との大きさの差が無い乃至ほとんど無いいわゆる平行光である。
なお、本明細書で平行光というときには、1本のレーザ光を走査することによりビーム群に構成された光の横断面積が光路上の位置によって実質的に変わりがないレーザ光をいうものとする。
【0013】
また、油膜検出装置E1は、水面Wに照射するレーザ光L3の光軸と水面Wで反射したレーザ光L4の光軸とが同軸となるようにレーザ光L3,L4を導く第2の光学系の一例としての同軸落射部300と、同軸落射部300からのレーザ光L5を受光する受光手段の一例としての受光部400と、を備えている。この同軸落射部300は、入射した光の一部を反射して残りを透過させる部分透過鏡の一例としてのハーフミラー310を有する。このハーフミラー310は、反射光と透過光の強さがほぼ等しくなるように形成されている板状部材である。
更に説明すると、同軸落射部300は、照射部200からのレーザ光L2をハーフミラー310に反射させ、その反射光であるレーザ光L3を水面Wに全反射するように導き、かつ、水面Wで全反射したレーザ光L4をハーフミラー310に透過させ、その透過光であるレーザ光L5を受光部400に受光されるように導く。レーザ光L4は、レーザ光L3の入射角に等しい角度で水面Wから反射していく。すなわち、レーザ光L3の入射角とレーザ光L4の反射角とは互いに等しい。
【0014】
このように、照射部200は、水面Wの油膜検知に用いる検出光を、所定の範囲を照射する平行光として出力するように構成されている。そして、同軸落射部300は、検出光をハーフミラー310を介して水面Wに全反射させ、その全反射した検出光をハーフミラー310を介して受光部400に向かわせるように構成されている。
このため、検出光を広い範囲に照射することが可能であり、水面Wの高さが変動して油膜検出装置E1に対する距離が変わっても、受光部400による油膜検出に必要な検出光の受光に影響を受けず、また、水面Wが波立ったりしても、同様に、油膜検出に必要な検出光の受光に影響を受けない。
【0015】
また、油膜検出装置E1は、受光部400が受光したレーザ光L5を所定の信号に変換することでレーザ光L5の強度情報を得て水面Wの反射率を演算する演算手段の一例としての演算部500と、演算部500による演算結果を基に、水面Wに油膜が存在するか否かを判断する判断手段の一例としての判断部600と、判断部600により水面Wに油膜が存在するとの判断がされるとユーザに通知する通知手段の一例としての通知部700と、を備えている。
【0016】
ここで、レーザ光源100としては、図示しないレーザダイオードと、レーザダイオードに所定の電圧が印加されるように制御する図示しない駆動回路と、で構成する例が考えられる。
また、照射部200の構成例については後述する。
【0017】
また、同軸落射部300の構成については上述したとおりである。
また、受光部400としては、レーザ光L5を集光するための図示しない集光レンズと、集光した光の強度に応じた電気信号に変換する図示しないフォトダイオードと、で構成する例が考えられる。
【0018】
また、演算部500及び判断部600としては、予め定められた動作制御プログラム(ファームウェア)に従ってデジタル演算処理を実行する図示しないCPU(Central Processing Unit)と、CPUの作業用メモリ等として用いられる図示しないRAM(Random Access Memory)と、CPUにより実行される処理プログラムや処理プログラムにて用いられる各種のデータが格納される図示しないROM(Read Only Memory)と、で構成する例が考えられる。
また、通知部700としては、ユーザに対して視覚的に通知する図示しない表示画面で構成する例が考えられ、また、汎用の通信手段にて遠隔のユーザに通知するための通信インターフェースで構成する例が考えられる。
【0019】
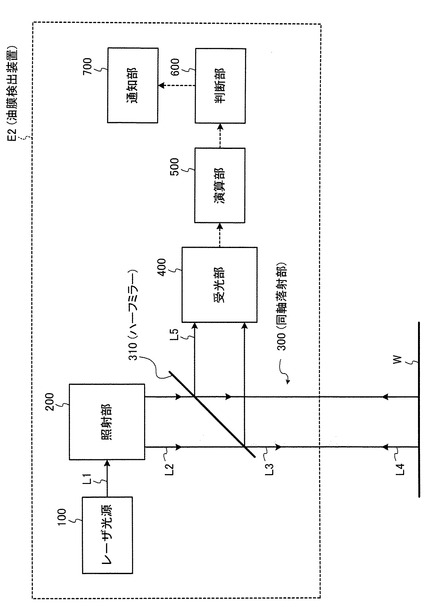
図2は、本実施の形態に係る光反射装置を適用する別の油膜検出装置E2の構成例を示すブロック図である。なお、油膜検出装置E2の基本的な構成は、上述した油膜検出装置E1(図1参照)と共通するため、同じ構成には同じ符号を用い、また、その説明を省略することがある。
同図に示す油膜検出装置E2は、レーザ光源100、照射部200、同軸落射部300、受光部400、演算部500、判断部600及び通知部700を備えている。同軸落射部300は、ハーフミラー310を有する。このような油膜検出装置E2の構成は、油膜検出装置E1と共通する。
【0020】
ここで、油膜検出装置E2が油膜検出装置E1と相違する構成について具体的に説明する。油膜検出装置E2が備える同軸落射部300は、ハーフミラー310を透過して水面Wに検出光を照射すると共にハーフミラー310で反射して受光部400に検出光を入射する点で、ハーフミラー310で反射して水面Wに検出光を照射すると共にハーフミラー310を透過して受光部400に検出光を入射する油膜検出装置E1が備える同軸落射部300と異なる。
【0021】
すなわち、油膜検出装置E2が備える同軸落射部300では、水面Wを照射するレーザ光L3はハーフミラー310を透過したものであり、受光部400に受光されるレーザ光L5はハーフミラー310で反射したものである。言い換えると、油膜検出装置E2が備える同軸落射部300では、照射部200からのレーザ光L2をハーフミラー310に透過させ、その透過光であるレーザ光L3を水面Wに全反射するように導き、かつ、水面Wで全反射したレーザ光L4をハーフミラー310に反射させ、その反射光であるレーザ光L5を受光部400に受光されるように導く。
【0022】
〔第1の実施の形態〕
図3は、第1の実施の形態に係る照射部200の構成例を示すブロック図である。なお、本実施の形態に係る照射部200は、油膜検出装置E1に適用することが可能であり、また、油膜検出装置E2に適用することも可能である。
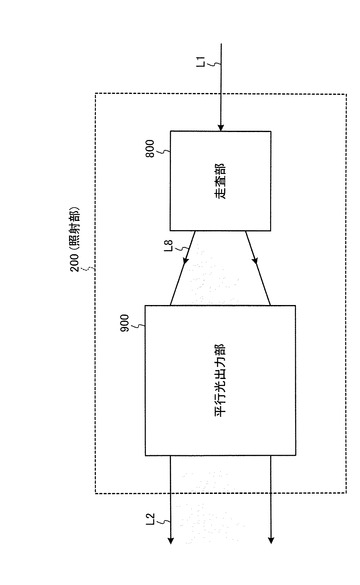
同図に示すように、本実施の形態の照射部200は、レーザ光源100により発光されたレーザ光L1を二次元に走査する走査光学系の一例としての走査部800と、走査部800により二次元に走査されて成るレーザ光(ビーム群)L8の向きを変えて平行光にしてレーザ光L2を出力する照射光学系の一例としての平行光出力部(光反射装置)900と、を備えている。
【0023】
更に説明すると、レーザ光L1は、走査部800により二次元に走査されることで、連続的に振られるように順次光路が変えられる。このように光路が変えられてなるレーザ光L8は、1本のレーザ光L1のビーム径よりも広い領域を通過していく。
また、レーザ光L8は、走査部800によって角度を付けて走査される。すなわち、レーザ光L8は、走査部800によって拡散する方向に向くように光路が変えられる。このため、レーザ光L8が通過する領域の面積は、光路下流(図3における左の方向)に行くに従って大きくなる。
【0024】
拡散しながら進むレーザ光L8は、通過する領域の面積が光路下流に行っても増加ないし減少しないように、平行光出力部900によって更に光路が変えられる。このように平行光出力部900によって光路が変えられて平行に進むレーザ光L2は、上述した同軸落射部300(図1又は図2参照)に導かれる。
【0025】
次に、走査部800及び平行光出力部900の構成例について説明する。
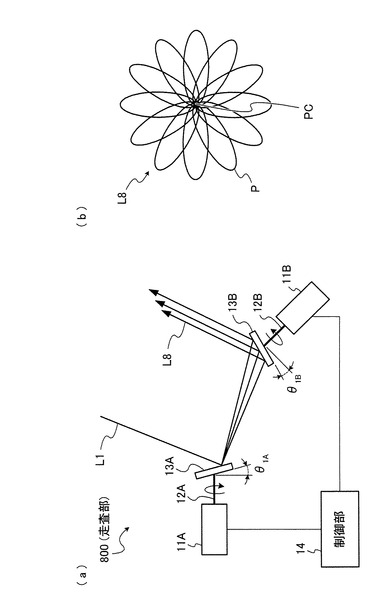
図4は、走査部800の構成例を示す図である。すなわち、同図の(a)は、走査部800の構成を説明する図であり、(b)は、走査部800により走査されたレーザ光L8のパターンPを説明する図である。
同図の(a)に示す走査部800は、いわゆる回転傾きミラーを採用した構成であり、複数の回転ミラーを組み合わせて、レーザ光源100からのレーザ光L1を走査している。具体的に説明すると、同図に示す走査部800は、駆動源11Aの回転軸12Aに取り付けられた平面状の円盤ミラー13Aと、駆動源11Bの回転軸12Bに取り付けられた平面状の円盤ミラー13Bと、駆動源11A,11Bの駆動を制御する制御部14と、を備えている。
【0026】
円盤ミラー13Aは、回転軸12Aに対して傾斜して取り付けられている。また、円盤ミラー13Bは、回転軸12Bに対して傾斜して取り付けられている。円盤ミラー13Aが回転軸12Aに対して傾斜する傾斜角度はθ1Aであり、また、円盤ミラー13Bが回転軸12Bに対して傾斜する傾斜角度はθ1Bである。
【0027】
レーザ光源100からのレーザ光L1が円盤ミラー13Aに入射するように、円盤ミラー13Aをレーザ光源100に対して配置している。また、円盤ミラー13Aで反射したレーザ光L1が円盤ミラー13Bに入射するように、円盤ミラー13Bを円盤ミラー13Aに対して配置している。このため、レーザ光L1は、円盤ミラー13Aで反射した後に円盤ミラー13Bで反射する。なお、円盤ミラー13Bで反射したレーザ光L8は、平行光出力部900に向かう。
【0028】
円盤ミラー13Aは、駆動源11Aによって単位時間当たり回転数n1Aで回転し、また、円盤ミラー13Bは、駆動源11Bによって単位時間当たり回転数n1Bで回転する。円盤ミラー13Aの回転方向と円盤ミラー13Bの回転方向とは互いに同じである。このため、走査部800によりレーザ光L1が走査されることで描くレーザ光L8の形状は、図4の(b)に示すように、複数の円形状が含まれるパターンPである。
【0029】
ここで、円盤ミラー13Aの回転数n1Aと円盤ミラー13Bの回転数n1Bとの関係について説明する。制御部14は、円盤ミラー13Aの回転数n1Aと円盤ミラー13Bの回転数n1Bを制御する。すなわち、制御部14は、回転数n1Aと回転数n1Bとの回転比Nを、ユーザの指示を基に制御する。
回転数n1Aと回転数n1Bとの回転比Nは、様々な値を採用することが考えられる。更に説明すると、回転比Nが正の整数(1以上の整数)のときには、図4の(b)に示すパターンPが変化しない。その一方で、回転比Nが正の整数以外の数のときには、同図の(b)に示すパターンPは、中心位置PCを中心に回転する。このようにパターンPを回転させることで、検出対象面である水面W(図1又は図2参照)にレーザ光L3をまんべんなく照射することが可能になる。
【0030】
なお、同図の(b)に示すパターンPは、その一例を図示したものであり、これ以外のパターンPの場合もある。すなわち、円盤ミラー13Aの傾斜角度θ1A及び回転数n1Aと円盤ミラー13Bの傾斜角度θ1B及び回転数n1BによってパターンPが変わる。例えば、傾斜角度θ1A,θ1Bが小さいと円が小さくなり、傾斜角度θ1A,θ1Bが大きいと円が大きくなる。
【0031】
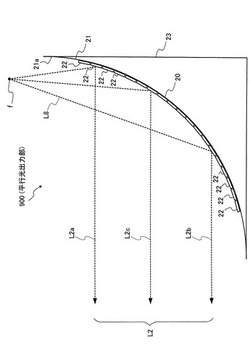
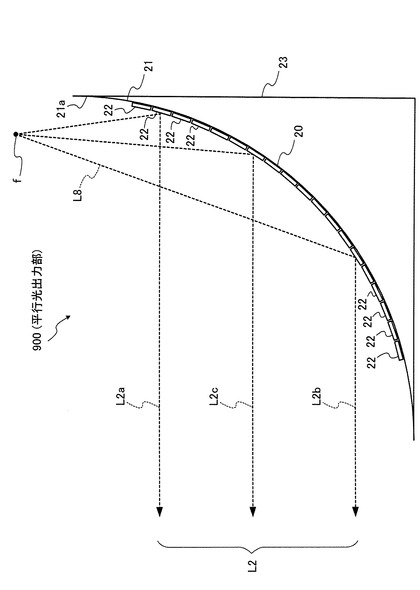
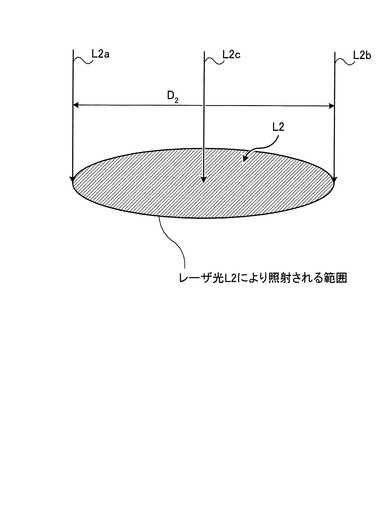
図5は、平行光出力部900の構成例を示す図であり、図6は、平行光出力部900から出力されるレーザ光L2を説明するための図である。
図5に示す光反射装置の一例としての平行光出力部900は、いわゆるオフセットパラボラを採用した構成であり、走査部800からのレーザ光L8を放物面鏡を用いて平行光に変換している。具体的に説明すると、同図に示す平行光出力部900は、光反射装置本体の一例としての本体部23と、本体部23に設けられ、放物曲面21の内面21aに小さい平面鏡22を多数並べた凹面鏡の一例としての反射鏡20と、を備えている。
【0032】
この反射鏡20は、一般的な放物曲面の一部のみを用いた楕円形状であり、焦点fを有する。この焦点fに、走査部800により走査されるレーザ光L8の走査中心が位置するようにレイアウトされている。そして、レーザ光L8が反射鏡20の平面鏡22で反射したレーザ光L2a,L2b,L2cを含むレーザ光L2は、図6に示すように、外径D2の所定の照射範囲を照射する。付言すると、このレーザ光L2は、同軸落射部300(図1又は図2参照)に入射する。
【0033】
更に説明すると、図5に示すように、反射鏡20の焦点fは、オフセットされた位置に存在する。すなわち、焦点fは、レーザ光L2の光路領域以外の領域に位置している。したがって、焦点fに位置する走査部800により、レーザ光L2が遮られることがなく、幅広い範囲について油膜検出することが可能になる。
【0034】
ビーム群としてのレーザ光L8は、次第に拡がっており、光路下流側の横断面積が光路上流側の横断面積よりも大きい。ところが、反射鏡20の平面鏡22で反射すると、レーザ光L2は、光路上流側の横断面積と光路下流側の横断面積との大きさの差がない。このように、反射鏡20は、レーザ光L2を拡散させないように、走査部800からのレーザ光L8の向きを平行にするように作用する。
【0035】
また、上述したように、反射鏡20には、複数の平面鏡22が配列されている。このため、レーザ光L8を構成するレーザビームの各々は、反射鏡22により反射したときにビーム径は変わらない。更に説明すると、レーザ光L8を構成するレーザビームの各々を、放物曲面21の内面21aで反射させると、ビーム径が拡がってしまう。ビーム径が変わるレーザ光を検出光として用いると、水面W(図1又は図2参照)の位置が変わることによって受光部400の受光に影響が及んでしまう。ところが、本実施の形態では、レーザ光L8を平面鏡22で反射させるので、ビーム径が拡がらず、レーザ光L2のビーム径は変わらないので、そのような影響が及ばない。
【0036】
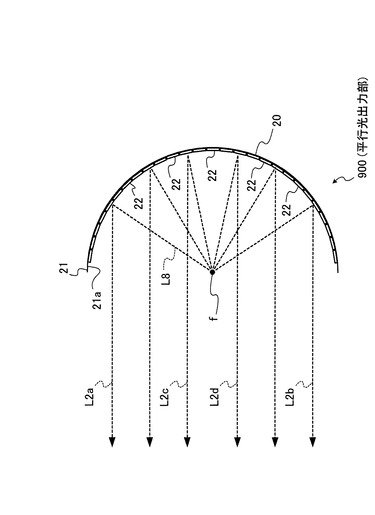
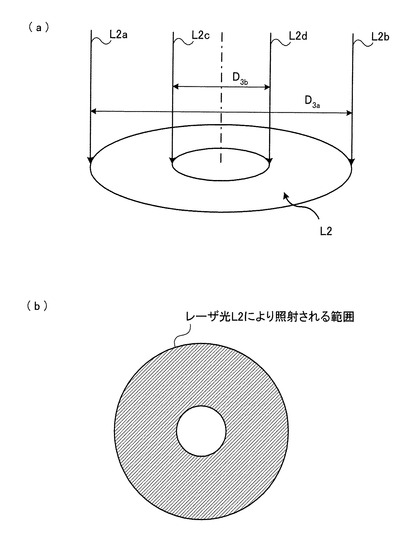
図7は、平行光出力部900の他の構成例を示す図である。図8は、平行光出力部900から出力されるレーザ光L2を説明するための図であり、(a)はレーザ光L2の斜視図であり、(b)はレーザ光L2の照射範囲を説明する平面図である。
図7に示す光反射装置の一例としての平行光出力部900は、焦点fがオフセットしていない構成である点で、図5に示す構成と異なる。焦点fがオフセットしていない場合には、上述したように、レーザ光L2が遮られる部分が存在する。すなわち、図8の(a)に示すように、レーザ光L2は外径D3aであるが、その中心部分では、レーザ光L2が、焦点fに設置されている走査部800(図3参照)によって遮られる。そのため、レーザ光L2が照射されない部分(図8の(a)に示す内径D3bの部分)が存在する。したがって、図8の(b)に示すように、レーザ光L2の照射範囲すなわち油膜検出ができる範囲は、斜線で図示するいわゆるドーナツ型になる。しかしながら、このような構成であっても、所定の範囲についての油膜検出することが可能である。また、このような構成は、装置の小型化のために焦点fをオフセットの位置に配置できない場合に採用されることが考えられる。
【0037】
〔第2の実施の形態〕
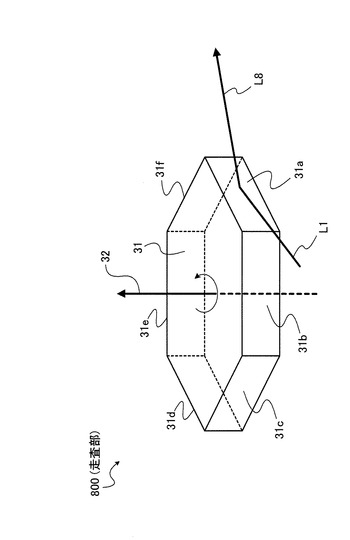
図9は、第2の実施の形態に係る走査部800の構成例を示す図である。図10は、ポリゴンミラー31の傾き角を説明する図であり、(a)〜(f)は、反射面31a〜31fを含む縦断面図であり、(g)は、レーザ光L8を説明する図である。なお、本実施の形態では、平行光出力部900としては、第1の実施の形態に示す構成を採用することができる。
図9に示す走査部800は、いわゆる傾きポリゴンミラーを採用した構成であり、レーザ光源100からのレーザ光L1を走査している。具体的に説明すると、同図に示す走査部800は、6面の反射面31a,31b,31c,31d,31e,31fを有する回転多面鏡の一例としてのポリゴンミラー31を備えている。このポリゴンミラー31は、回転軸32を中心にして回転するように構成されている。付言すると、走査部800は、ポリゴンミラー31を回転駆動する図示しないポリゴンモータと、ポリゴンモータの駆動を制御する図示しない制御部と、を備えている。
【0038】
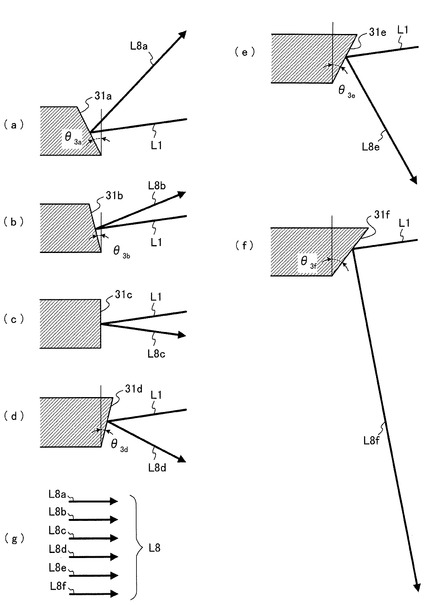
ポリゴンミラー31の反射面31a〜31fは、回転軸32に対して傾斜して形成されている。すなわち、反射面31a〜31fは、回転軸32に対する傾き角が互いに異なる。そして、レーザ光L1は、反射面31a,31b,31c,31d,31e,31fの順に入射する。このため、レーザ光L1は、一方向に回転駆動されるポリゴンミラー31の反射面31a,31b,31c,31d,31e,31fに入射し、その反射光が、図10の(a)〜(f)に示すように、レーザ光L8a,L8b,L8c,L8d,L8e,L8fとなる。
【0039】
ここで、図10の(a)〜(f)に示すように、反射面31aは傾き角θ3aであり、反射面31bは傾き角θ3bである。反射面31cは傾き角が0度(θ3c=0)であり、反射面31dは傾き角θ3dであり、反射面31eは傾き角θ3eであり、反射面31fは傾き角θ3fである。
更に説明すると、各々の傾き角は、θ3a<θ3b<0(θ3c)<θ3d<θ3e<θ3fの関係である。反射面31a〜31fのうち隣り合うもの同士は、傾き角が互いに異なる。このように、反射面31a〜31fは、傾き角が互いに異なっており、また、反射面31a〜31fの走査する順番に傾き角が大きくなっていくようにポリゴンミラー31が形成されている。このため、同図の(g)に示すように、ポリゴンミラー31の走査によって、上からレーザ光L8a〜L8fの順になったレーザ光L8が平行光出力部900に導かれる。
【0040】
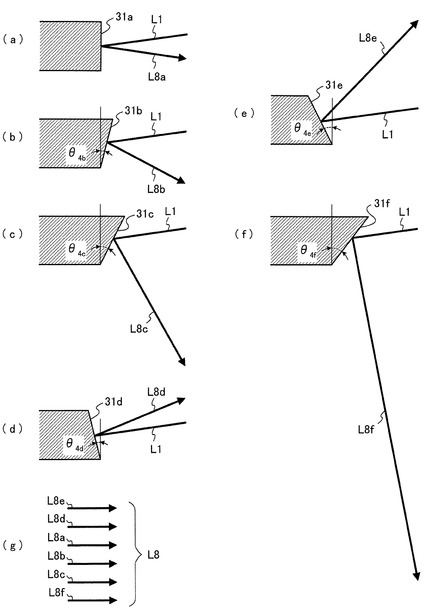
図11は、ポリゴンミラー31の変形例の場合の傾き角を説明する図であり、(a)〜(f)は、反射面31a〜31fを含む縦断面図であり、(g)は、レーザ光L8を説明する図である。
同図に示すように、反射面31aは傾き角が0度(θ4a=0)であり、反射面31bは傾き角θ4bである。反射面31cは傾き角θ4cであり、反射面31dは傾き角θ4dであり、反射面31eは傾き角θ4eであり、反射面31fは傾き角θ4fである。そして、各々の傾き角は、θ4e<θ4d<0(θ4a)<θ4b<θ4c<θ4fの関係である。このように、変形例では、傾き角の大きい順に反射面31a〜31fが走査するものではない。反射面31a〜31fの走査する順番では、傾き角が順に変わるものではなく、アトランダムに変わる。言い換えると、反射面31a〜31fの傾き角θ4a〜θ4fは、ポリゴンミラー31の回転方向に沿って増加と減少を繰り返す。このため、図11の(g)に示すように、ポリゴンミラー31の走査によって平行光出力部900に向かうレーザ光L8a〜L8fの順番に、上から配列されるものではなく、バラバラである。したがって、この変形例によれば、ポリゴンミラー31の回転速度を高めなくても水面W(図1又は図2参照)での油膜の検出確率を向上させることが可能になる。
【図面の簡単な説明】
【0041】
【図1】本実施の形態に係る光反射装置を適用する油膜検出装置の構成例を示すブロック図である。
【図2】本実施の形態に係る光反射装置を適用する別の油膜検出装置の構成例を示すブロック図である。
【図3】第1の実施の形態に係る照射部の構成例を示すブロック図である。
【図4】走査部の構成例を示す図であり、(a)は、走査部の構成を説明する図であり、(b)は、走査部により走査されたレーザ光のパターンを説明する図である。
【図5】平行光出力部の構成例を示す図である。
【図6】平行光出力部から出力されるレーザ光を説明するための図である。
【図7】平行光出力部の他の構成例を示す図である。
【図8】平行光出力部から出力されるレーザ光を説明するための図であり、(a)はレーザ光の斜視図であり、(b)はレーザ光の照射範囲を説明する平面図である。
【図9】第2の実施の形態に係る走査部の構成例を示す図である。
【図10】ポリゴンミラーの傾き角を説明する図であり、(a)〜(f)は、反射面を含む縦断面図であり、(g)は、レーザ光を説明する図である。
【図11】ポリゴンミラーの変形例の場合の傾き角を説明する図であり、(a)〜(f)は、反射面を含む縦断面図であり、(g)は、レーザ光を説明する図である。
【符号の説明】
【0042】
20…反射鏡、21…放物曲面、21a…内面、22…平面鏡、23…本体部、900…平行光出力部、D2,D3a…外径、D3b…内径、E1,E2…油膜検出装置、f…焦点、L2,L2a,L2b,L2c,L2d,L8…レーザ光、W…水面
【技術分野】
【0001】
本発明は、入射された光を反射する光反射装置に関するものであり、より詳しくは、入射される拡散光を反射してその反射光を平行光とする光反射装置に関するものである。本発明は、検出対象面に検出光を反射させて反射率を検出する反射率検出装置に適用可能であり、より具体的には、例えば浄水場や河川、湖沼等の水面の油膜を検出する油膜検出装置に適用可能である。
【背景技術】
【0002】
油膜による光の反射率が水面による光の反射率よりも高いことに着目し、水面に光を照射してその反射光の強度を測定することで反射率を求め、これによって水面での油膜の有無を検出するという油膜検出方法が知られている。この方法を用いた装置としては、例えば特許文献1〜6に記載された油膜検出装置が知られている。これらの油膜検出装置での課題は、一般的に、水面の状態(水位の変動や波立ち、浮遊物の有無等)に影響されることなく、広範囲にわたって面積の小さな油膜であっても検出できることである。
【0003】
具体的に説明すると、固定されている光源からのレーザ光等の検出光の水面に対する照射角度が一定である場合には、水位の変動や波立ち等が生じると、光源と水面との間の距離や反射光の方向が変わる。そのために、水面からの反射光が十分に受光部に受光されず、油膜の検出が困難になる。そのための対策としては、受光部自体を大型化したり受光部に集光するためのミラーを大型化したりして水面からの反射光を受光する受光面積を増やすことが考えられる。しかしながら、そのような対策では、油膜検出装置全体の大型化が避けられず、広い設置面積が必要となること等によって好ましくない。このような対策に代わるものとして、従来から検出光の照射範囲を広くすることを目的として種々の技術が提案されている。
【0004】
例えば特許文献1及び特許文献2には、光源から水面に照射されるレーザ光の角度を機械的手段により一定周期で変化させる油膜検出装置が開示されている。
特許文献3には、光源からの光を凹レンズにより発散ビームとして水面に照射し、その反射光を回帰性のリフレクタにより反射させたときの水面からの再反射光を凹レンズを介して検出するようにした光学系を備えた油膜検出装置が開示されている。
特許文献4には、光源からのレーザ光を走査する回転ミラーとその周囲に配置された複数の反射ミラーとを備えた油膜検知器が開示されている。すなわち、これらの反射ミラーによりレーザ光を水面に対して複数方向から交差的に走査することにより、大口径の放物ミラー等を用いずに、あらゆる方向の波立ちや水面の角度に対して安定した受光を可能にするものである。
特許文献5には、複数の光源を環状に配置して水面にレーザ光を照射し、これらの反射光を受光することによって水面の波立ちや浮遊物の影響を低減する油膜検知器が開示されている。
特許文献6には、レーザ光の照射方向を可変とする振動式又は固定式ミラーを設け、これらのミラーを介した水面からの反射光を受光することにより、水面の波立ちや浮遊物の影響を低減する油膜検知器が開示されている。
【0005】
【特許文献1】特開2001−153800号公報
【特許文献2】特開2003−149146号公報
【特許文献3】特開2005−24414号公報
【特許文献4】特開平10−90177号公報
【特許文献5】特開平10−213541号公報
【特許文献6】特開2003−149134号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの技術においては、構造や駆動機構が複雑化したり検出光の照射範囲が十分でなかったりするという問題があった。
このような状況下で、従来とは異なる新しい光学系が望まれている。すなわち、油膜検出装置の設計の際には、諸条件に応じて光学系を選択することから、従来とは異なる光学系が提供できれば、設計の際の選択肢が増え、諸条件に応じてより適切な光学系を選択することが可能になる。
【0007】
本発明は、検出光を広範囲にわたって均一に照射することができる光学系を簡易な構造で実現することが可能な光反射装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明が適用される光反射装置は、入射した光を反射して反射光を出力する光反射装置であって、装置本体と、前記装置本体に設けられ、焦点を有する放物面の内面側に反射面を有する凹面鏡と、を含み、前記凹面鏡の前記反射面は、当該凹面鏡よりも小寸の平面鏡を複数配列して構成され、前記凹面鏡の焦点を通って入射した光が前記平面鏡で反射した反射光は、所定の照射範囲を有する平行光であることを特徴とするものである。
【0009】
ここで、前記凹面鏡の焦点は、反射光が通過する領域以外の領域に位置することを特徴とすることができる。
【発明の効果】
【0010】
本発明によれば、検出光を広範囲にわたって均一に照射することができる光学系を、本発明を適用しない場合に比べて簡易な構造で実現することが可能になる。
【発明を実施するための最良の形態】
【0011】
以下、添付図面を参照して、本発明の実施の形態について詳細に説明する。
図1は、本実施の形態に係る光反射装置を適用する油膜検出装置E1の構成例を示すブロック図である。
同図に示す油膜検出装置E1は、液面に油膜が存在するときの光の反射率と存在しないときの光の反射率とが違うという性質を利用して、検出対象面である水面Wに油膜があるか否かを検出する装置である。この水面Wとしては、例えば浄水場や河川、湖沼等の水面を指すものであり、水面Wの位置が高くなったり低くなったり、また、水面Wが波立ったりするものである。
【0012】
この油膜検出装置E1は、レーザ光L1を発光する発光手段の一例としてのレーザ光源100と、レーザ光源100により発光されたレーザ光L1が所定の範囲を照射するように作用する第1の光学系の一例としての照射部200と、を備えている。更に説明すると、照射部200は、レーザ光L1を走査することにより所定の範囲を照射するレーザ光L2を出力する。レーザ光L2は、レーザ光L2の光路上流側の横断面積と光路下流側の横断面積との大きさの差が無い乃至ほとんど無いいわゆる平行光である。
なお、本明細書で平行光というときには、1本のレーザ光を走査することによりビーム群に構成された光の横断面積が光路上の位置によって実質的に変わりがないレーザ光をいうものとする。
【0013】
また、油膜検出装置E1は、水面Wに照射するレーザ光L3の光軸と水面Wで反射したレーザ光L4の光軸とが同軸となるようにレーザ光L3,L4を導く第2の光学系の一例としての同軸落射部300と、同軸落射部300からのレーザ光L5を受光する受光手段の一例としての受光部400と、を備えている。この同軸落射部300は、入射した光の一部を反射して残りを透過させる部分透過鏡の一例としてのハーフミラー310を有する。このハーフミラー310は、反射光と透過光の強さがほぼ等しくなるように形成されている板状部材である。
更に説明すると、同軸落射部300は、照射部200からのレーザ光L2をハーフミラー310に反射させ、その反射光であるレーザ光L3を水面Wに全反射するように導き、かつ、水面Wで全反射したレーザ光L4をハーフミラー310に透過させ、その透過光であるレーザ光L5を受光部400に受光されるように導く。レーザ光L4は、レーザ光L3の入射角に等しい角度で水面Wから反射していく。すなわち、レーザ光L3の入射角とレーザ光L4の反射角とは互いに等しい。
【0014】
このように、照射部200は、水面Wの油膜検知に用いる検出光を、所定の範囲を照射する平行光として出力するように構成されている。そして、同軸落射部300は、検出光をハーフミラー310を介して水面Wに全反射させ、その全反射した検出光をハーフミラー310を介して受光部400に向かわせるように構成されている。
このため、検出光を広い範囲に照射することが可能であり、水面Wの高さが変動して油膜検出装置E1に対する距離が変わっても、受光部400による油膜検出に必要な検出光の受光に影響を受けず、また、水面Wが波立ったりしても、同様に、油膜検出に必要な検出光の受光に影響を受けない。
【0015】
また、油膜検出装置E1は、受光部400が受光したレーザ光L5を所定の信号に変換することでレーザ光L5の強度情報を得て水面Wの反射率を演算する演算手段の一例としての演算部500と、演算部500による演算結果を基に、水面Wに油膜が存在するか否かを判断する判断手段の一例としての判断部600と、判断部600により水面Wに油膜が存在するとの判断がされるとユーザに通知する通知手段の一例としての通知部700と、を備えている。
【0016】
ここで、レーザ光源100としては、図示しないレーザダイオードと、レーザダイオードに所定の電圧が印加されるように制御する図示しない駆動回路と、で構成する例が考えられる。
また、照射部200の構成例については後述する。
【0017】
また、同軸落射部300の構成については上述したとおりである。
また、受光部400としては、レーザ光L5を集光するための図示しない集光レンズと、集光した光の強度に応じた電気信号に変換する図示しないフォトダイオードと、で構成する例が考えられる。
【0018】
また、演算部500及び判断部600としては、予め定められた動作制御プログラム(ファームウェア)に従ってデジタル演算処理を実行する図示しないCPU(Central Processing Unit)と、CPUの作業用メモリ等として用いられる図示しないRAM(Random Access Memory)と、CPUにより実行される処理プログラムや処理プログラムにて用いられる各種のデータが格納される図示しないROM(Read Only Memory)と、で構成する例が考えられる。
また、通知部700としては、ユーザに対して視覚的に通知する図示しない表示画面で構成する例が考えられ、また、汎用の通信手段にて遠隔のユーザに通知するための通信インターフェースで構成する例が考えられる。
【0019】
図2は、本実施の形態に係る光反射装置を適用する別の油膜検出装置E2の構成例を示すブロック図である。なお、油膜検出装置E2の基本的な構成は、上述した油膜検出装置E1(図1参照)と共通するため、同じ構成には同じ符号を用い、また、その説明を省略することがある。
同図に示す油膜検出装置E2は、レーザ光源100、照射部200、同軸落射部300、受光部400、演算部500、判断部600及び通知部700を備えている。同軸落射部300は、ハーフミラー310を有する。このような油膜検出装置E2の構成は、油膜検出装置E1と共通する。
【0020】
ここで、油膜検出装置E2が油膜検出装置E1と相違する構成について具体的に説明する。油膜検出装置E2が備える同軸落射部300は、ハーフミラー310を透過して水面Wに検出光を照射すると共にハーフミラー310で反射して受光部400に検出光を入射する点で、ハーフミラー310で反射して水面Wに検出光を照射すると共にハーフミラー310を透過して受光部400に検出光を入射する油膜検出装置E1が備える同軸落射部300と異なる。
【0021】
すなわち、油膜検出装置E2が備える同軸落射部300では、水面Wを照射するレーザ光L3はハーフミラー310を透過したものであり、受光部400に受光されるレーザ光L5はハーフミラー310で反射したものである。言い換えると、油膜検出装置E2が備える同軸落射部300では、照射部200からのレーザ光L2をハーフミラー310に透過させ、その透過光であるレーザ光L3を水面Wに全反射するように導き、かつ、水面Wで全反射したレーザ光L4をハーフミラー310に反射させ、その反射光であるレーザ光L5を受光部400に受光されるように導く。
【0022】
〔第1の実施の形態〕
図3は、第1の実施の形態に係る照射部200の構成例を示すブロック図である。なお、本実施の形態に係る照射部200は、油膜検出装置E1に適用することが可能であり、また、油膜検出装置E2に適用することも可能である。
同図に示すように、本実施の形態の照射部200は、レーザ光源100により発光されたレーザ光L1を二次元に走査する走査光学系の一例としての走査部800と、走査部800により二次元に走査されて成るレーザ光(ビーム群)L8の向きを変えて平行光にしてレーザ光L2を出力する照射光学系の一例としての平行光出力部(光反射装置)900と、を備えている。
【0023】
更に説明すると、レーザ光L1は、走査部800により二次元に走査されることで、連続的に振られるように順次光路が変えられる。このように光路が変えられてなるレーザ光L8は、1本のレーザ光L1のビーム径よりも広い領域を通過していく。
また、レーザ光L8は、走査部800によって角度を付けて走査される。すなわち、レーザ光L8は、走査部800によって拡散する方向に向くように光路が変えられる。このため、レーザ光L8が通過する領域の面積は、光路下流(図3における左の方向)に行くに従って大きくなる。
【0024】
拡散しながら進むレーザ光L8は、通過する領域の面積が光路下流に行っても増加ないし減少しないように、平行光出力部900によって更に光路が変えられる。このように平行光出力部900によって光路が変えられて平行に進むレーザ光L2は、上述した同軸落射部300(図1又は図2参照)に導かれる。
【0025】
次に、走査部800及び平行光出力部900の構成例について説明する。
図4は、走査部800の構成例を示す図である。すなわち、同図の(a)は、走査部800の構成を説明する図であり、(b)は、走査部800により走査されたレーザ光L8のパターンPを説明する図である。
同図の(a)に示す走査部800は、いわゆる回転傾きミラーを採用した構成であり、複数の回転ミラーを組み合わせて、レーザ光源100からのレーザ光L1を走査している。具体的に説明すると、同図に示す走査部800は、駆動源11Aの回転軸12Aに取り付けられた平面状の円盤ミラー13Aと、駆動源11Bの回転軸12Bに取り付けられた平面状の円盤ミラー13Bと、駆動源11A,11Bの駆動を制御する制御部14と、を備えている。
【0026】
円盤ミラー13Aは、回転軸12Aに対して傾斜して取り付けられている。また、円盤ミラー13Bは、回転軸12Bに対して傾斜して取り付けられている。円盤ミラー13Aが回転軸12Aに対して傾斜する傾斜角度はθ1Aであり、また、円盤ミラー13Bが回転軸12Bに対して傾斜する傾斜角度はθ1Bである。
【0027】
レーザ光源100からのレーザ光L1が円盤ミラー13Aに入射するように、円盤ミラー13Aをレーザ光源100に対して配置している。また、円盤ミラー13Aで反射したレーザ光L1が円盤ミラー13Bに入射するように、円盤ミラー13Bを円盤ミラー13Aに対して配置している。このため、レーザ光L1は、円盤ミラー13Aで反射した後に円盤ミラー13Bで反射する。なお、円盤ミラー13Bで反射したレーザ光L8は、平行光出力部900に向かう。
【0028】
円盤ミラー13Aは、駆動源11Aによって単位時間当たり回転数n1Aで回転し、また、円盤ミラー13Bは、駆動源11Bによって単位時間当たり回転数n1Bで回転する。円盤ミラー13Aの回転方向と円盤ミラー13Bの回転方向とは互いに同じである。このため、走査部800によりレーザ光L1が走査されることで描くレーザ光L8の形状は、図4の(b)に示すように、複数の円形状が含まれるパターンPである。
【0029】
ここで、円盤ミラー13Aの回転数n1Aと円盤ミラー13Bの回転数n1Bとの関係について説明する。制御部14は、円盤ミラー13Aの回転数n1Aと円盤ミラー13Bの回転数n1Bを制御する。すなわち、制御部14は、回転数n1Aと回転数n1Bとの回転比Nを、ユーザの指示を基に制御する。
回転数n1Aと回転数n1Bとの回転比Nは、様々な値を採用することが考えられる。更に説明すると、回転比Nが正の整数(1以上の整数)のときには、図4の(b)に示すパターンPが変化しない。その一方で、回転比Nが正の整数以外の数のときには、同図の(b)に示すパターンPは、中心位置PCを中心に回転する。このようにパターンPを回転させることで、検出対象面である水面W(図1又は図2参照)にレーザ光L3をまんべんなく照射することが可能になる。
【0030】
なお、同図の(b)に示すパターンPは、その一例を図示したものであり、これ以外のパターンPの場合もある。すなわち、円盤ミラー13Aの傾斜角度θ1A及び回転数n1Aと円盤ミラー13Bの傾斜角度θ1B及び回転数n1BによってパターンPが変わる。例えば、傾斜角度θ1A,θ1Bが小さいと円が小さくなり、傾斜角度θ1A,θ1Bが大きいと円が大きくなる。
【0031】
図5は、平行光出力部900の構成例を示す図であり、図6は、平行光出力部900から出力されるレーザ光L2を説明するための図である。
図5に示す光反射装置の一例としての平行光出力部900は、いわゆるオフセットパラボラを採用した構成であり、走査部800からのレーザ光L8を放物面鏡を用いて平行光に変換している。具体的に説明すると、同図に示す平行光出力部900は、光反射装置本体の一例としての本体部23と、本体部23に設けられ、放物曲面21の内面21aに小さい平面鏡22を多数並べた凹面鏡の一例としての反射鏡20と、を備えている。
【0032】
この反射鏡20は、一般的な放物曲面の一部のみを用いた楕円形状であり、焦点fを有する。この焦点fに、走査部800により走査されるレーザ光L8の走査中心が位置するようにレイアウトされている。そして、レーザ光L8が反射鏡20の平面鏡22で反射したレーザ光L2a,L2b,L2cを含むレーザ光L2は、図6に示すように、外径D2の所定の照射範囲を照射する。付言すると、このレーザ光L2は、同軸落射部300(図1又は図2参照)に入射する。
【0033】
更に説明すると、図5に示すように、反射鏡20の焦点fは、オフセットされた位置に存在する。すなわち、焦点fは、レーザ光L2の光路領域以外の領域に位置している。したがって、焦点fに位置する走査部800により、レーザ光L2が遮られることがなく、幅広い範囲について油膜検出することが可能になる。
【0034】
ビーム群としてのレーザ光L8は、次第に拡がっており、光路下流側の横断面積が光路上流側の横断面積よりも大きい。ところが、反射鏡20の平面鏡22で反射すると、レーザ光L2は、光路上流側の横断面積と光路下流側の横断面積との大きさの差がない。このように、反射鏡20は、レーザ光L2を拡散させないように、走査部800からのレーザ光L8の向きを平行にするように作用する。
【0035】
また、上述したように、反射鏡20には、複数の平面鏡22が配列されている。このため、レーザ光L8を構成するレーザビームの各々は、反射鏡22により反射したときにビーム径は変わらない。更に説明すると、レーザ光L8を構成するレーザビームの各々を、放物曲面21の内面21aで反射させると、ビーム径が拡がってしまう。ビーム径が変わるレーザ光を検出光として用いると、水面W(図1又は図2参照)の位置が変わることによって受光部400の受光に影響が及んでしまう。ところが、本実施の形態では、レーザ光L8を平面鏡22で反射させるので、ビーム径が拡がらず、レーザ光L2のビーム径は変わらないので、そのような影響が及ばない。
【0036】
図7は、平行光出力部900の他の構成例を示す図である。図8は、平行光出力部900から出力されるレーザ光L2を説明するための図であり、(a)はレーザ光L2の斜視図であり、(b)はレーザ光L2の照射範囲を説明する平面図である。
図7に示す光反射装置の一例としての平行光出力部900は、焦点fがオフセットしていない構成である点で、図5に示す構成と異なる。焦点fがオフセットしていない場合には、上述したように、レーザ光L2が遮られる部分が存在する。すなわち、図8の(a)に示すように、レーザ光L2は外径D3aであるが、その中心部分では、レーザ光L2が、焦点fに設置されている走査部800(図3参照)によって遮られる。そのため、レーザ光L2が照射されない部分(図8の(a)に示す内径D3bの部分)が存在する。したがって、図8の(b)に示すように、レーザ光L2の照射範囲すなわち油膜検出ができる範囲は、斜線で図示するいわゆるドーナツ型になる。しかしながら、このような構成であっても、所定の範囲についての油膜検出することが可能である。また、このような構成は、装置の小型化のために焦点fをオフセットの位置に配置できない場合に採用されることが考えられる。
【0037】
〔第2の実施の形態〕
図9は、第2の実施の形態に係る走査部800の構成例を示す図である。図10は、ポリゴンミラー31の傾き角を説明する図であり、(a)〜(f)は、反射面31a〜31fを含む縦断面図であり、(g)は、レーザ光L8を説明する図である。なお、本実施の形態では、平行光出力部900としては、第1の実施の形態に示す構成を採用することができる。
図9に示す走査部800は、いわゆる傾きポリゴンミラーを採用した構成であり、レーザ光源100からのレーザ光L1を走査している。具体的に説明すると、同図に示す走査部800は、6面の反射面31a,31b,31c,31d,31e,31fを有する回転多面鏡の一例としてのポリゴンミラー31を備えている。このポリゴンミラー31は、回転軸32を中心にして回転するように構成されている。付言すると、走査部800は、ポリゴンミラー31を回転駆動する図示しないポリゴンモータと、ポリゴンモータの駆動を制御する図示しない制御部と、を備えている。
【0038】
ポリゴンミラー31の反射面31a〜31fは、回転軸32に対して傾斜して形成されている。すなわち、反射面31a〜31fは、回転軸32に対する傾き角が互いに異なる。そして、レーザ光L1は、反射面31a,31b,31c,31d,31e,31fの順に入射する。このため、レーザ光L1は、一方向に回転駆動されるポリゴンミラー31の反射面31a,31b,31c,31d,31e,31fに入射し、その反射光が、図10の(a)〜(f)に示すように、レーザ光L8a,L8b,L8c,L8d,L8e,L8fとなる。
【0039】
ここで、図10の(a)〜(f)に示すように、反射面31aは傾き角θ3aであり、反射面31bは傾き角θ3bである。反射面31cは傾き角が0度(θ3c=0)であり、反射面31dは傾き角θ3dであり、反射面31eは傾き角θ3eであり、反射面31fは傾き角θ3fである。
更に説明すると、各々の傾き角は、θ3a<θ3b<0(θ3c)<θ3d<θ3e<θ3fの関係である。反射面31a〜31fのうち隣り合うもの同士は、傾き角が互いに異なる。このように、反射面31a〜31fは、傾き角が互いに異なっており、また、反射面31a〜31fの走査する順番に傾き角が大きくなっていくようにポリゴンミラー31が形成されている。このため、同図の(g)に示すように、ポリゴンミラー31の走査によって、上からレーザ光L8a〜L8fの順になったレーザ光L8が平行光出力部900に導かれる。
【0040】
図11は、ポリゴンミラー31の変形例の場合の傾き角を説明する図であり、(a)〜(f)は、反射面31a〜31fを含む縦断面図であり、(g)は、レーザ光L8を説明する図である。
同図に示すように、反射面31aは傾き角が0度(θ4a=0)であり、反射面31bは傾き角θ4bである。反射面31cは傾き角θ4cであり、反射面31dは傾き角θ4dであり、反射面31eは傾き角θ4eであり、反射面31fは傾き角θ4fである。そして、各々の傾き角は、θ4e<θ4d<0(θ4a)<θ4b<θ4c<θ4fの関係である。このように、変形例では、傾き角の大きい順に反射面31a〜31fが走査するものではない。反射面31a〜31fの走査する順番では、傾き角が順に変わるものではなく、アトランダムに変わる。言い換えると、反射面31a〜31fの傾き角θ4a〜θ4fは、ポリゴンミラー31の回転方向に沿って増加と減少を繰り返す。このため、図11の(g)に示すように、ポリゴンミラー31の走査によって平行光出力部900に向かうレーザ光L8a〜L8fの順番に、上から配列されるものではなく、バラバラである。したがって、この変形例によれば、ポリゴンミラー31の回転速度を高めなくても水面W(図1又は図2参照)での油膜の検出確率を向上させることが可能になる。
【図面の簡単な説明】
【0041】
【図1】本実施の形態に係る光反射装置を適用する油膜検出装置の構成例を示すブロック図である。
【図2】本実施の形態に係る光反射装置を適用する別の油膜検出装置の構成例を示すブロック図である。
【図3】第1の実施の形態に係る照射部の構成例を示すブロック図である。
【図4】走査部の構成例を示す図であり、(a)は、走査部の構成を説明する図であり、(b)は、走査部により走査されたレーザ光のパターンを説明する図である。
【図5】平行光出力部の構成例を示す図である。
【図6】平行光出力部から出力されるレーザ光を説明するための図である。
【図7】平行光出力部の他の構成例を示す図である。
【図8】平行光出力部から出力されるレーザ光を説明するための図であり、(a)はレーザ光の斜視図であり、(b)はレーザ光の照射範囲を説明する平面図である。
【図9】第2の実施の形態に係る走査部の構成例を示す図である。
【図10】ポリゴンミラーの傾き角を説明する図であり、(a)〜(f)は、反射面を含む縦断面図であり、(g)は、レーザ光を説明する図である。
【図11】ポリゴンミラーの変形例の場合の傾き角を説明する図であり、(a)〜(f)は、反射面を含む縦断面図であり、(g)は、レーザ光を説明する図である。
【符号の説明】
【0042】
20…反射鏡、21…放物曲面、21a…内面、22…平面鏡、23…本体部、900…平行光出力部、D2,D3a…外径、D3b…内径、E1,E2…油膜検出装置、f…焦点、L2,L2a,L2b,L2c,L2d,L8…レーザ光、W…水面
【特許請求の範囲】
【請求項1】
入射した光を反射して反射光を出力する光反射装置であって、
装置本体と、
前記装置本体に設けられ、焦点を有する放物面の内面側に反射面を有する凹面鏡と、
を含み、
前記凹面鏡の前記反射面は、当該凹面鏡よりも小寸の平面鏡を複数配列して構成され、
前記凹面鏡の焦点を通って入射した光が前記平面鏡で反射した反射光は、所定の照射範囲を有する平行光であることを特徴とする光反射装置。
【請求項2】
前記凹面鏡の焦点は、反射光が通過する領域以外の領域に位置することを特徴とする請求項1に記載の光反射装置。
【請求項1】
入射した光を反射して反射光を出力する光反射装置であって、
装置本体と、
前記装置本体に設けられ、焦点を有する放物面の内面側に反射面を有する凹面鏡と、
を含み、
前記凹面鏡の前記反射面は、当該凹面鏡よりも小寸の平面鏡を複数配列して構成され、
前記凹面鏡の焦点を通って入射した光が前記平面鏡で反射した反射光は、所定の照射範囲を有する平行光であることを特徴とする光反射装置。
【請求項2】
前記凹面鏡の焦点は、反射光が通過する領域以外の領域に位置することを特徴とする請求項1に記載の光反射装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−244120(P2009−244120A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2008−91369(P2008−91369)
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000219451)東亜ディーケーケー株式会社 (204)
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000219451)東亜ディーケーケー株式会社 (204)
【Fターム(参考)】
[ Back to top ]