
光学ディスク装置
【課題】面ぶれ量が規格外の光ディスクでフォーカスサーボを行う場合にも、フォーカスサーボの制御定数を決定するための信号値を適切に設定する。
【解決手段】対物レンズ32を駆動して光ディスク1に照射するビームの焦点を移動させるアクチュエータ31と、光ディスク1から反射したビームを検知して検知信号として出力する光検出器4と、アクチュエータ31を駆動して光検出器4の検知信号からビームの焦点を制御するサーボ制御部8とを備え、サーボ制御部8は、光検出器4の検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータ31を駆動するフォーカスサーボ部80と、光検出器4の検出信号が合焦状態となったときに対物レンズ32の位置が所定範囲内であれば前記検出信号から制御定数を決定する初期化部90とを有する。
【解決手段】対物レンズ32を駆動して光ディスク1に照射するビームの焦点を移動させるアクチュエータ31と、光ディスク1から反射したビームを検知して検知信号として出力する光検出器4と、アクチュエータ31を駆動して光検出器4の検知信号からビームの焦点を制御するサーボ制御部8とを備え、サーボ制御部8は、光検出器4の検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータ31を駆動するフォーカスサーボ部80と、光検出器4の検出信号が合焦状態となったときに対物レンズ32の位置が所定範囲内であれば前記検出信号から制御定数を決定する初期化部90とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光学ディスク装置に関し、特に、フォーカスエラー信号振幅を調整する技術に関する。
【背景技術】
【0002】
CD(Compact Disc)、DVD(Digital Versatile Disc)、BD(Blu-ray Disc)等の光ディスクに情報を記録する光学ディスク装置において、光ディスクの記録面と対物レンズの距離を維持するフォーカスサーボの調整は従来から課題となっている。従来の光学ディスク装置では、光ディスクの面振れを補正するため、光学センサから検出したフォーカスエラー信号と強度信号を用いてフォーカスサーボの制御定数(ゲインなど)を決定するための基準値を光ディスクの個体毎に設定している。そして、光学ディスク装置は、上記設定された基準値に基づいてフォーカスサーボの制御定数を決定し、この制御定数により対物レンズを変位させてレーザからのビームが記録面で焦点を結ぶように光ディスクの記録面と対物レンズの距離を維持する。このようなフォーカスサーボを行う光学ディスク装置としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−73178号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1のような光学ディスク装置では、フォーカスサーボの開始時に、光ディスクの面ぶれに追従する制御定数(例えば、フィードバックゲインなど)をフォーカスエラー信号により求めている。これは、レーザを照射する対物レンズを変位させて、焦点が合ったときのフォーカスエラー信号の値を学習し、この学習値から制御定数を決定している。
【0005】
光ディスクの面ぶれ量は各ディスクの規格にて定められており、通常、光ディスクの面ぶれ量は各ディスクの規格の範囲内であるものの、近年は世界各地で光ディスクが製造されており、必ずしも全ての光ディスクが規格の範囲内では無いため、品質の悪い光ディスクを光学ディスク装置にて再生/記録しなければならないケースがある。
【0006】
面ぶれ量が規格範囲外の光ディスクでフォーカスサーボを開始すると、上記従来例と同様に対物レンズを駆動させていき、焦点があった時点のフォーカスエラー信号を学習した場合、フォーカスエラー信号の振幅レベルは、面ぶれ量が規格範囲内の光ディスクに比して低い。この振幅レベルの低いフォーカスエラー信号でフォーカスサーボの制御定数を決定した場合、フォーカスサーボの追従性の低下や、サーボ系の発振などが発生する場合があった。
【0007】
そこで本発明は、上記問題点に鑑みてなされたもので、面ぶれ量が規格外の光ディスクでフォーカスサーボを行う場合にも、フォーカスサーボの制御定数を決定するための信号値を適切に設定することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、光ディスクの回転を制御する回転制御部と、前記光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームの焦点をフォーカス方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記アクチュエータを駆動して前記光学センサの検知信号から前記ビームの焦点を制御するサーボ制御部と、を備えた光ディスク装置において、前記サーボ制御部は、前記光学センサの検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータを駆動するフォーカスサーボ部と、前記前記光学センサの検出信号を入力し、前記制御定数を決定する初期化部、とを有し、前記初期化部は、前記回転制御部に所定の回転周波数で前記光ディスクを駆動し、所定のスイープ周波数で前記アクチュエータを駆動する初期化駆動部と、前記光学センサからの検知信号から前記ビームが前記光ディスクの所定の位置で結ばれたことを合焦状態として検知したときに、前記対物レンズの位置が所定の範囲内にある場合は、前記光学センサからの検知信号を前記アクチュエータを制御するための学習値として取得する学習部と、前記取得した学習値から前記アクチュエータを駆動する制御定数を決定する制御定数設定部と、を有する。
【発明の効果】
【0009】
したがって、本発明は、対物レンズを駆動しながら光学センサの検出値から合焦状態を判定したときに、対物レンズの位置が所定の範囲内であるときに、光学センサの検出値を学習値として取得し、この学習値からフォーカスサーボの制御定数を決定するようにしたので、対物レンズと光ディスクの面の相対速度が高いときの学習値から制御定数を決定することが可能となり、面ぶれ量が規格範囲を超えた光ディスクを使用する場合であっても、フォーカスサーボの追従性を確保することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態を示し、光学ディスク装置の構成を示すブロック図である。
【図2】本発明の実施形態を示し、サーボ制御部の機能ブロック図である。
【図3】本発明の第1の実施形態を示し、分岐用コネクタ及び分岐ケーブル及びプロトコル解析装置の要部の配線図。
【図4】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期が、光ディスクの回転周期に比して極めて長い例を示す。
【図5】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期と光ディスクの回転周期が近似する例を示す。
【図6】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期が、光ディスクの回転周期に比して極めて短い例を示す。
【発明を実施するための形態】
【0011】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0012】
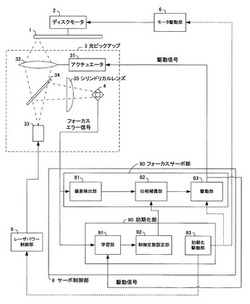
図1は、本発明の実施の形態の光学ディスク装置の構成を示すブロック図である。
【0013】
本発明の実施形態としての光学ディスク装置は、ディスクモータ2、光ピックアップ3、光検出器4、温度センサ5、モータ駆動部6、RF信号生成部7、サーボ制御部8、レーザパワー制御部9、レーザドライバ10、デコーダ11、制御部12、メモリ13及びエンコーダ14を備える。
【0014】
ディスクモータ2は、モータ駆動部6によって駆動され、光ディスク1を回転する。モータ駆動部6は、マイクロコンピュータで構成された制御部12からの指示によってモータの回転(回転/停止、回転数)を制御する。
【0015】
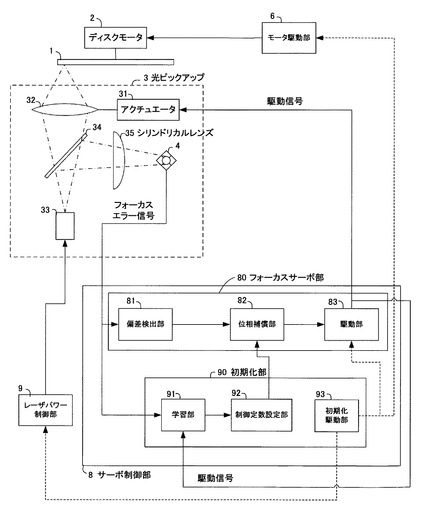
光ピックアップ3は、アクチュエータ31、対物レンズ32、レーザ33、受光部、スプリッタ、光検出器4(光学センサ)及び温度センサ5を主体として構成される。レーザ33は、記録及び再生のために所定の強度のレーザ光(ビーム)を発生する半導体レーザ(発光部)である。レーザ33から発光されたレーザ光は対物レンズ32を介して光ディスク1の記録面(光ディスク面)に照射される。受光部は、対物レンズ32を介し光ディスク1の記録面で反射したレーザ光を受け、受光した反射光を電気信号に変換し、変換された電気信号を検出値として出力する。対物レンズ32は、アクチュエータ31によって駆動され、光ディスク面上にレーザ光が合焦するように調整される。アクチュエータ31は、サーボ制御部8によって駆動される。光ピックアップ3の一例としては、図2で示すように、対物レンズ32とレーザ33の間にスプリッタ34を配置し、スプリッタ34からのレーザ光を光検出器4へ導くシリンドリカルレンズ35を備え、光検出器4が批点収差法によりフォーカスエラー信号を出力する構成を示している。
【0016】
レーザ33が発生したレーザ光はスプリッタ34(図2参照)を介して対物レンズ32から光ディスク1へ照射され、光ディスク1で反射したレーザ光(以下、反射光)はスプリッタ34で光検出器4に導かれる。また、レーザ33が発生したレーザ光はスプリッタ34で分離され、光検出器4に導かれる。光検出器4は、スプリッタ34からの反射光とスプリッタ34で分離されたレーザ光によって検出値を出力し、各制御部ではレーザ光の合焦位置や、レーザ光のパワーを監視する。温度センサ5は、光ピックアップ3の温度を検出する。
【0017】
RF信号生成部7は、光ピックアップ3からの信号のアナログ処理(増幅、復調等)をする。
【0018】
サーボ制御部8は、フォーカスサーボ、トラッキングサーボ、スライドサーボを制御する。すなわち、フォーカスサーボは、アクチュエータ31を駆動することによって、レーザ光が光ディスク1面上にレーザ光が合焦するように対物レンズ32を制御する。トラッキングサーボは、光ピックアップ3が光ディスク1のトラックに追従するように制御する。スライドサーボは、光ピックアップを所定の位置に動かし、その位置を保つように制御する。
【0019】
レーザパワー制御部9は、光ディスク1に予め記録されたレーザ出力、又は、OPC(Optimum Power Control)によって決定されたレーザ出力に従って、レーザ光の出力強度を制御する。レーザドライバ10は、レーザ33を駆動するドライバ回路である。レーザドライバ10は、レーザパワー制御部9によって制御される。
【0020】
デコーダ11は、光ピックアップ3からの信号を、RF信号、トラッキングエラー信号、フォーカスエラー信号等として出力する。エンコーダ14は、光ディスク1に書き込むデータを生成する。
【0021】
制御部(マイコン)12は、光学ディスク装置の動作を制御する。例えば、レーザ33から出力されるレーザ光の強度を決めるOPC処理、記録動作中のレーザ光の出力の制御処理をする。メモリ13は、制御部12によって実行されるプログラム及びプログラムの実行に必要なデータを格納する。
【0022】
図2は、本発明のサーボ制御部8の機能ブロック図である。図2において、サーボ制御部8は、フォーカスサーボ系のみを示している。サーボ制御部8はフォーカスサーボ部80の他に、トラッキングサーボ、スライドサーボを行うが、以下の説明ではフォーカスサーボについて説明し、トラッキングサーボ及びスライドサーボについては公知または周知の制御を行うものとする。
【0023】
図2のサーボ制御部8は、光ディスク1からの反射光を受光した光検出器4から批点収差法によるフォーカスエラー信号を入力し、焦点のずれ量を演算し、このずれ量と所定のゲイン(例えば、フィードバックゲイン)から補償値を演算し、補償値に応じたアクチュエータ31の駆動信号値を出力して対物レンズ32を駆動してフィードバック制御を行うフォーカスサーボ部80を有する。
【0024】
また、サーボ制御部8は、光ディスク1を検出するとフォーカスサーボ部80のゲイン等の制御定数を決定するために、後述するように光ディスク1の面ぶれを考慮してフォーカスエラー信号を学習し、この学習値からゲインを決定する初期化部90を有する。
【0025】
フォーカスサーボ部80の構成は、光検出器4からのフォーカスエラー信号を入力して、レーザ光の合焦状態を検知し、レーザ光の焦点のずれ量を検出する偏差検出部81と、焦点のずれ量を入力して所定のゲインを含む制御定数から補償値を求める位相補償部82と、補償値を入力してアクチュエータ31の駆動信号値を出力する駆動部83と、からなる。
【0026】
初期化部90は、光ディスク1の検出時に当該光ディスク1の面ぶれ量を考慮した制御定数を決定する。なお、光ディスク1の検出時は、光学ディスク装置のトレー(図示省略)が操作されて光ディスク1が挿入された時等である。なお、偏差検出部81は合焦状態を検知する合焦検知部としても機能する。
【0027】
初期化部90は、光ディスク1が挿入されると所定の駆動パターンで対物レンズ32とディスクモータ2を駆動するように駆動部83とモータ駆動部6に指令を送出し、レーザ33の発光をレーザパワー制御部9に指令する。ここで、初期化部90が指令する駆動パターンは、例えば、対物レンズ32を光ディスク1に接近させた後に光ピックアップ3側へ引き戻す動作を所定の周期で繰り返すスイープ動作と、ディスクモータ2を所定の回転周波数で駆動する。
【0028】
初期化部90は、上記所定の駆動パターンで対物レンズ32とディスクモータ2を駆動している期間(初期化期間)中に、フォーカスエラー信号と対物レンズ32の位置を監視して、対物レンズ32の位置が所定の範囲内にあるときに、合焦状態を示すフォーカスエラー信号を学習値(制御常数を決定する基準値)として取得し、このフォーカスエラー信号の振幅値(またはフォーカスエラー信号の和信号の値)からフィードバックゲインなどの制御定数を決定する。制御定数を決定した後には、所定の駆動パターンによる対物レンズ32とディスクモータ2及びレーザ33の駆動を終了し、光ディスク1の読み書きに移行する。
【0029】
このため、初期化部90は、所定の駆動パターンで対物レンズ32とディスクモータ2及びレーザ33の駆動を指令する初期化駆動部93と、所定の駆動パターンで各部を駆動する初期化期間で光検出器4からのフォーカスエラー信号と、駆動部83からの駆動信号を監視し、対物レンズ32の位置が所定の範囲内にあるときに、合焦状態を示すフォーカスエラー信号を学習値として取得する学習部91と、学習部91が取得した学習値からフォーカスサーボの制御定数を演算し、位相補償部82に設定する制御定数設定部92と、を備える。
【0030】
初期化駆動部93は、光ディスク1の面ぶれ量の規格範囲を超えて対物レンズ32をスイープ動作させる。そして、学習部91は対物レンズ32の位置としてアクチュエータ31の駆動信号値を監視し、フォーカスエラー信号が合焦状態となったときに、対物レンズ32の位置が所定の範囲内であれば、フォーカスエラー信号の振幅値(または和信号の値)を学習値として取得する。制御定数設定部92は、予め設定した関数などにより、取得した学習値からフォーカスサーボの制御定数を決定する。
【0031】
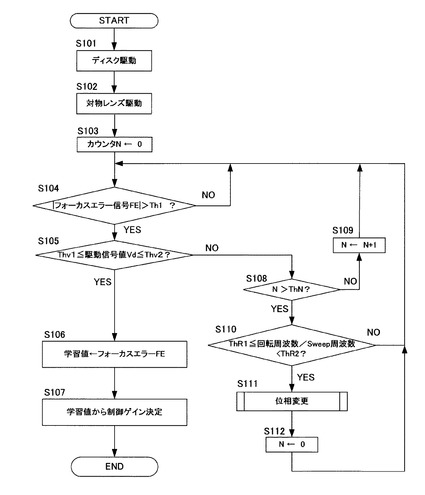
図3は、サーボ制御部8の初期化部90で行われる制御の一例を示すフローチャートである。
【0032】
まず、初期化部90は、ステップS101でディスクモータ2を所定の回転周波数で駆動するようにモータ駆動部6に指令する。ステップS102では、初期化部90がアクチュエータ31に所定の周期でスイープ動作を行うように指令し、レーザパワー制御部9に対してレーザ33の照射を指令する。ステップS103では、合焦状態となった回数を計数するためのカウンタNの値を0にリセットする。
【0033】
上記ステップS101〜S102により、光ディスク1はディスクモータ2によって所定の回転周波数で回転を開始し、対物レンズ32の位置は、所定の周期で光ディスク1に対して接離を繰り返し、レーザ33の照射によって光検出器4が出力するフォーカスエラー信号は対物レンズ32の位置と光ディスク1の面ぶれに応じて合焦状態となる。
【0034】
次に、初期化部90は、ステップS104ではフォーカスエラー信号の振幅値(電圧)が0を挟んで変化して振幅値の絶対値が所定の閾値Th1を超えて合焦状態となったか否かを判定する。フォーカスエラー信号が合焦状態となったときにはステップS105に進み、合焦でない場合にはフォーカスエラー信号の監視を繰り返す。
【0035】
ステップS105では、初期化部90はアクチュエータ31の駆動信号値を対物レンズ32の位置として監視し、対物レンズ32の位置が所定の範囲内にあるか否かを判定する。すなわち、駆動信号の電圧を駆動信号値Vdとし、この駆動信号値Vdが第1の閾値Thv1以上、かつ第2の閾値Thv2以下のときに対物レンズ32の位置がフォーカス方向で所定の範囲内にあると判定する。なお、閾値Thv1<閾値Thv2に設定され、駆動信号値Vdと対物レンズ32の位置の関係は、例えば、駆動信号値Vd=Thv2のときに対物レンズ32が所定の範囲内で最も光ディスク1に近接した位置とし、駆動信号値Vd=Thv1のときには対物レンズ32の位置が所定の範囲内で光ディスク1から最も離れた位置とする。さらに、駆動信号値Vdの第1の閾値Thv1と第2の閾値Thv2を光ディスク1の面ぶれの規格範囲とすることができる。
【0036】
そして、このステップS105では、対物レンズ32の位置が所定の範囲内にあると判定したときにはステップS106に進んで、ステップS104で取得したフォーカスエラー信号の振幅値を学習値として取得する。さらに、ステップS107では、所定の関数などを用いて学習値からフォーカスサーボのフィードバックゲインなどの制御定数を演算して決定し、フォーカスサーボ系の位相補償部82に制御定数を設定して初期化期間を終了する。初期化期間が終了すると、初期化駆動部93は、対物レンズ32のスイープ動作を終了する。
【0037】
一方、ステップS105の判定で、駆動信号値Vdが所定の範囲Thv1〜Thv2内にないと判定された場合には、ステップS108に進んで、フォーカスエラー信号が合焦状態となった回数を示すカウンタNの値が所定の閾値ThNを超えたか否かを判定する。カウンタNの値が閾値ThNを超えていなければステップS109に進んでカウンタNの値をインクリメントしてからステップS104のフォーカスエラー信号の監視を繰り返す。
【0038】
一方、カウンタNの値が所定の閾値ThNを超えた場合には、ステップS110に進んで、初期化部90は、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1以上、かつ閾値ThR2以下であるか否かを判定する。なお、スイープ周波数は、対物レンズ32を光ディスク1に接近させてから遠ざけて、再び接近させる一周期(スイープ周期)の逆数とする。また、閾値ThR1は、例えば50%などに設定し、閾値ThR2は、例えば200%などに設定される。これにより、回転周波数とスイープ周波数が近似する領域、換言すれば、光ディスク1の合焦位置の変化が少ない状態であるか否かを判定する。
【0039】
ステップS110の判定で、回転周波数とスイープ周波数の比が所定の閾値ThR1以上で閾値ThR2以下と判定された場合には、光ディスク1の合焦位置の変化が少ない状態であるためステップS111に進んで、回転周波数とスイープ周波数の位相を変更する。一方、回転周波数とスイープ周波数の比が所定の閾値ThR1未満と判定された場合には、ステップS104へ戻ってフォーカスエラー信号の監視を続ける。
【0040】
ステップS111では、対物レンズ32のスイープ動作を一時的に停止して、スイープ周波数の位相を所定値(例えば、180°)だけずらす。次に、初期化部90は、ステップS112でカウンタNの値をリセットしてステップS104のフォーカスエラー信号の監視に復帰する。
【0041】
以上の処理により、フォーカスエラー信号が合焦状態となったときに、対物レンズ32の位置が所定の範囲内にあれば、フォーカスエラー信号の振幅値を学習値として取得して、この学習値からフォーカスサーボの制御定数を決定する。
【0042】
一方、フォーカスエラー信号が合焦状態となった回数が閾値ThNを超えても、対物レンズ32の位置が所定の範囲外の場合には、光ディスク1の回転周波数と対物レンズ32のスイープ周波数が近似している場合などが想定されるので、回転周波数の位相と、スイープ周波数の位相を相対的にずらすことで、フォーカスエラー信号が合焦状態となったときの対物レンズ32の位置と光ディスク1の位置の相対位置を変更し、対物レンズ32の位置が所定の範囲内でフォーカスエラー信号が合焦状態となるように回転周期とスイープ周波数の位相を制御する。
【0043】
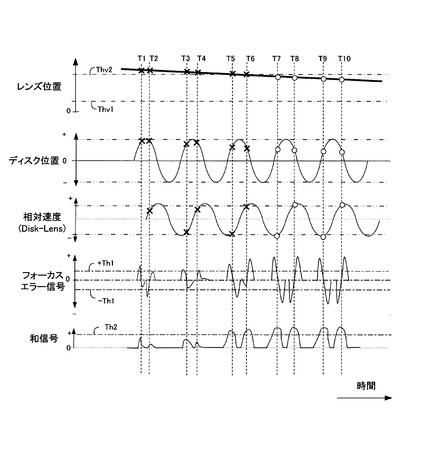
図4〜図6は、上記初期化部90の制御による学習値の取得の様子を示すグラフである。図4〜図6は、それぞれ、対物レンズ32の位置[μm]、光ディスク1の位置[μm]、光ディスク1の面と、対物レンズ32のフォーカス方向での変位の相対速度[μm/sec]、フォーカスエラー信号の振幅値[mV]、和信号の値[mV]と時間の関係を示すグラフである。
【0044】
図4は、対物レンズ32のスイープ周期が、光ディスク1の回転周期に比して極めて長い例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR2を超える場合を示す。この例では、対物レンズ32のスイープ周期の一部のみを図示しており、対物レンズ32の位置は、光ディスク1に最も接近した後に、離れていく場合を示す。
【0045】
フォーカスエラー信号は、図中時刻T1〜T10で合焦状態となる。時刻T1〜T6にかけては、フォーカスエラー信号が合焦状態となるが、対物レンズ32の位置が所定の範囲内(Thv2とThv1)にないため、初期化部90は、これらのフォーカスエラー信号を学習値としては取得しない。これらの合焦状態では、光ディスク1の面の変位と、対物レンズ32の変位の相対速度が低いため、フォーカスエラー信号の振幅値は低い。これらの低い振幅値でフォーカスサーボの制御定数を決定してしまうと、前記従来例のようにフォーカスサーボ系が発振等を引き起こしてフォーカスサーボの追従性が低下するのである。
【0046】
この関係を、時刻T1、T2について説明すると、図4においては、時刻T1、T2の相対速度は他の時刻に比して「0」に近い。相対速度が「0」を挟んで「+」、「−」に符号が変化するのは、時間の経過と共に光ディスクと対物レンズ32の間の距離が接離の方向で逆転することを示す。相対速度の符号が逆転する箇所ではフォーカスエラー信号が最大あるいは最小に至ることなく合焦点を通過してしまうためである。
【0047】
一方、時刻T7〜T10で示す対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内では、合焦状態となったときの光ディスク1と対物レンズ32の相対速度は、所定の範囲外の場合に比して大きくなり、相対速度の増大に応じてフォーカスエラー信号の振幅値も本来の大きさとなる。初期化部90は、時刻T7の時点の合焦状態のフォーカスエラー信号の振幅値を学習値として取得する。したがって、振幅値の大きなフォーカスエラー信号が制御定数を決定するための値として得られるため、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。
【0048】
特に、駆動信号値Vdの第1の閾値Thv1と第2の閾値Thv2を、光ディスク1の面ぶれの規格範囲に設定することで、面ぶれが規格範囲を超える光ディスク1と、面ぶれが規格範囲内の光ディスク1を等しく扱うことができ、フォーカスサーボ系の制御定数を安定させて、対物レンズ32のフォーカス方向の追従性を確保することができる。
【0049】
なお、上記ではフォーカスエラー信号を学習値とする例を示したが、光検出器4の和信号を学習値として扱い、和信号から制御常数を決定することも可能である。
【0050】
図5は、対物レンズ32のスイープ周期と、光ディスク1の回転周期が近似している例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1以上、かつ閾値ThR2以下の場合を示す。
【0051】
この例では、時刻T1〜T4でフォーカスエラー信号が合焦状態となる。ここで、上記図3のフローチャートで閾値ThN=3とした場合、時刻T4で対物レンズ32の位置が所定の範囲外で合焦状態となった回数が閾値ThN=3を超えるため、対物レンズ32のスイープ動作を一時停止させてスイープ周期を180°変更する。そして、スイープ周期の変更後には、時刻T6で対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内で合焦状態となって、初期化部90は時刻T6のフォーカスエラー信号の振幅値を学習値として取得する。この時刻T6における光ディスク1の面と対物レンズ32の相対速度は、対物レンズ32の位置が所定の範囲外で合焦状態となったときに比して大きく、フォーカスエラー信号の振幅値も本来の大きさとなる。この振幅値が本来の大きさとなった学習値からフォーカスサーボの制御定数を決定することで、フォーカスサーボ系の追従性を向上させることができ、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。
【0052】
図6は、対物レンズ32のスイープ周期が、光ディスク1の回転周周期に比して極めて短い例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1未満の場合を示す。この例では、光ディスク1の回転周期の一部のみを図示している。
【0053】
フォーカスエラー信号は、図中時刻T1〜T10で合焦状態となる。時刻T1〜T6にかけては、フォーカスエラー信号が合焦状態となるが、対物レンズ32の位置が所定の範囲内(駆動信号値がThv2とThv1の間)にないため、初期化部90は、これらのフォーカスエラー信号を学習値としては取得しない。これらの合焦状態では、光ディスク1の面の変位速度と、対物レンズ32の変位速度の相対速度が比較的低いため、フォーカスエラー信号の振幅値は前記の理由により小さい。これらの低い振幅値でフォーカスサーボの制御定数を決定してしまうと、前記従来例のようにフォーカスサーボ系が発振を引き起こす場合がある。
【0054】
一方、時刻T7〜T10で示す対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内では、合焦状態となったときの光ディスク1と対物レンズ32の相対速度は、所定の範囲外の場合に比して大きくなり、相対速度の増大に応じてフォーカスエラー信号の振幅値も本来の大きさとなる。初期化部90は、時刻T7の時点の合焦状態のフォーカスエラー信号の振幅値を学習値として取得する。したがって、振幅値の大きなフォーカスエラー信号が制御定数を決定するための値として得られるため、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。なお、上記ではフォーカスエラー信号を学習値とする例を示したが、光検出器4の和信号を学習値として扱うことも可能である。
【0055】
このように、本発明では、対物レンズ32の位置が所定の範囲内のときのフォーカスエラー信号の振幅値を制御定数を決定するための値として用いるようにしたので、面ぶれが規格の範囲外の光ディスク1においても、光ディスク1の面と対物レンズ32のフォーカス方向での相対速度が比較的高い領域で、フォーカスエラー信号を制御定数を決定する値として取得することで、振幅値として本来の大きさのフォーカスエラー信号で制御定数を決定することが可能となって、面ぶれが規格の範囲外の光ディスク1を利用する場合においても安定したフォーカスサーボを実現できるのである。
【0056】
なお、上記実施形態では、対物レンズ32の位置が所定の範囲内となったときのフォーカスエラー信号を用いたが、対物レンズ32の位置が所定の範囲内となってから所定回数のフォーカスエラー信号を取得し、これら複数のフォーカスエラー信号の振幅の平均値から制御定数を決定するようにしても良く、また、フォーカスエラー信号に変わって和信号の値から制御定数を決定するようにしてもよい。
【0057】
また、上記実施形態では、光ディスク1の回転周期と対物レンズ32のスイープ周期の位相を変更する際に、スイープ周期の位相を変更する例を示したが、ディスクモータ2の回転周波数を一時的に変更し、光ディスク1の回転周期の位相を変更するようにしてもよく、対物レンズ32のスイープ周期の位相と光ディスク1の回転周期の位相を相対的に変化させればよい。
【0058】
また、上記実施形態では、フォーカスエラー信号として非点収差法を用いる例を示したが、これに限定されるものではくフーコー法やスポットサイズ法などの公知の手法を適宜選択することができる。
【0059】
また、上記実施形態では、制御部12とサーボ制御部8が分離した構成を示したが、制御部12でサーボ制御部8を処理しても良い。
【0060】
また、上記実施形態では、学習部91で合焦の検知を行う例を示したが、偏差検出部81の合焦の検知結果を学習部91に送信するようにしてもよい。
【0061】
また、上記実施形態では、対物レンズ32の位置を示す値として、アクチュエータ31の駆動信号を用いたが、対物レンズ32のフォーカス方向における位置が把握可能な値であれば他の信号を用いるようにしてもよい。
【産業上の利用可能性】
【0062】
以上のように、本発明は面ぶれが規格の範囲外の光ディスクを使用する際にも安定したフォーカスサーボを実現可能な光学ディスク装置を提供することが可能となる。
【符号の説明】
【0063】
1 光ディスク
4 光検出器
8 サーボ制御部
31 アクチュエータ
32 対物レンズ
81 偏差検出部
82 位相補償部
83 駆動部
90 初期化部
91 学習部
92 制御定数設定部
93 初期化駆動部
【技術分野】
【0001】
本発明は、光学ディスク装置に関し、特に、フォーカスエラー信号振幅を調整する技術に関する。
【背景技術】
【0002】
CD(Compact Disc)、DVD(Digital Versatile Disc)、BD(Blu-ray Disc)等の光ディスクに情報を記録する光学ディスク装置において、光ディスクの記録面と対物レンズの距離を維持するフォーカスサーボの調整は従来から課題となっている。従来の光学ディスク装置では、光ディスクの面振れを補正するため、光学センサから検出したフォーカスエラー信号と強度信号を用いてフォーカスサーボの制御定数(ゲインなど)を決定するための基準値を光ディスクの個体毎に設定している。そして、光学ディスク装置は、上記設定された基準値に基づいてフォーカスサーボの制御定数を決定し、この制御定数により対物レンズを変位させてレーザからのビームが記録面で焦点を結ぶように光ディスクの記録面と対物レンズの距離を維持する。このようなフォーカスサーボを行う光学ディスク装置としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−73178号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1のような光学ディスク装置では、フォーカスサーボの開始時に、光ディスクの面ぶれに追従する制御定数(例えば、フィードバックゲインなど)をフォーカスエラー信号により求めている。これは、レーザを照射する対物レンズを変位させて、焦点が合ったときのフォーカスエラー信号の値を学習し、この学習値から制御定数を決定している。
【0005】
光ディスクの面ぶれ量は各ディスクの規格にて定められており、通常、光ディスクの面ぶれ量は各ディスクの規格の範囲内であるものの、近年は世界各地で光ディスクが製造されており、必ずしも全ての光ディスクが規格の範囲内では無いため、品質の悪い光ディスクを光学ディスク装置にて再生/記録しなければならないケースがある。
【0006】
面ぶれ量が規格範囲外の光ディスクでフォーカスサーボを開始すると、上記従来例と同様に対物レンズを駆動させていき、焦点があった時点のフォーカスエラー信号を学習した場合、フォーカスエラー信号の振幅レベルは、面ぶれ量が規格範囲内の光ディスクに比して低い。この振幅レベルの低いフォーカスエラー信号でフォーカスサーボの制御定数を決定した場合、フォーカスサーボの追従性の低下や、サーボ系の発振などが発生する場合があった。
【0007】
そこで本発明は、上記問題点に鑑みてなされたもので、面ぶれ量が規格外の光ディスクでフォーカスサーボを行う場合にも、フォーカスサーボの制御定数を決定するための信号値を適切に設定することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、光ディスクの回転を制御する回転制御部と、前記光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームの焦点をフォーカス方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記アクチュエータを駆動して前記光学センサの検知信号から前記ビームの焦点を制御するサーボ制御部と、を備えた光ディスク装置において、前記サーボ制御部は、前記光学センサの検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータを駆動するフォーカスサーボ部と、前記前記光学センサの検出信号を入力し、前記制御定数を決定する初期化部、とを有し、前記初期化部は、前記回転制御部に所定の回転周波数で前記光ディスクを駆動し、所定のスイープ周波数で前記アクチュエータを駆動する初期化駆動部と、前記光学センサからの検知信号から前記ビームが前記光ディスクの所定の位置で結ばれたことを合焦状態として検知したときに、前記対物レンズの位置が所定の範囲内にある場合は、前記光学センサからの検知信号を前記アクチュエータを制御するための学習値として取得する学習部と、前記取得した学習値から前記アクチュエータを駆動する制御定数を決定する制御定数設定部と、を有する。
【発明の効果】
【0009】
したがって、本発明は、対物レンズを駆動しながら光学センサの検出値から合焦状態を判定したときに、対物レンズの位置が所定の範囲内であるときに、光学センサの検出値を学習値として取得し、この学習値からフォーカスサーボの制御定数を決定するようにしたので、対物レンズと光ディスクの面の相対速度が高いときの学習値から制御定数を決定することが可能となり、面ぶれ量が規格範囲を超えた光ディスクを使用する場合であっても、フォーカスサーボの追従性を確保することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態を示し、光学ディスク装置の構成を示すブロック図である。
【図2】本発明の実施形態を示し、サーボ制御部の機能ブロック図である。
【図3】本発明の第1の実施形態を示し、分岐用コネクタ及び分岐ケーブル及びプロトコル解析装置の要部の配線図。
【図4】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期が、光ディスクの回転周期に比して極めて長い例を示す。
【図5】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期と光ディスクの回転周期が近似する例を示す。
【図6】本発明の実施形態を示し、対物レンズの位置と、光ディスクの位置と、光ディスクの面と対物レンズのフォーカス方向での変位の相対速度と、フォーカスエラー信号の振幅値と、和信号の値と時間の関係を示すグラフで、対物レンズのスイープ周期が、光ディスクの回転周期に比して極めて短い例を示す。
【発明を実施するための形態】
【0011】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0012】
図1は、本発明の実施の形態の光学ディスク装置の構成を示すブロック図である。
【0013】
本発明の実施形態としての光学ディスク装置は、ディスクモータ2、光ピックアップ3、光検出器4、温度センサ5、モータ駆動部6、RF信号生成部7、サーボ制御部8、レーザパワー制御部9、レーザドライバ10、デコーダ11、制御部12、メモリ13及びエンコーダ14を備える。
【0014】
ディスクモータ2は、モータ駆動部6によって駆動され、光ディスク1を回転する。モータ駆動部6は、マイクロコンピュータで構成された制御部12からの指示によってモータの回転(回転/停止、回転数)を制御する。
【0015】
光ピックアップ3は、アクチュエータ31、対物レンズ32、レーザ33、受光部、スプリッタ、光検出器4(光学センサ)及び温度センサ5を主体として構成される。レーザ33は、記録及び再生のために所定の強度のレーザ光(ビーム)を発生する半導体レーザ(発光部)である。レーザ33から発光されたレーザ光は対物レンズ32を介して光ディスク1の記録面(光ディスク面)に照射される。受光部は、対物レンズ32を介し光ディスク1の記録面で反射したレーザ光を受け、受光した反射光を電気信号に変換し、変換された電気信号を検出値として出力する。対物レンズ32は、アクチュエータ31によって駆動され、光ディスク面上にレーザ光が合焦するように調整される。アクチュエータ31は、サーボ制御部8によって駆動される。光ピックアップ3の一例としては、図2で示すように、対物レンズ32とレーザ33の間にスプリッタ34を配置し、スプリッタ34からのレーザ光を光検出器4へ導くシリンドリカルレンズ35を備え、光検出器4が批点収差法によりフォーカスエラー信号を出力する構成を示している。
【0016】
レーザ33が発生したレーザ光はスプリッタ34(図2参照)を介して対物レンズ32から光ディスク1へ照射され、光ディスク1で反射したレーザ光(以下、反射光)はスプリッタ34で光検出器4に導かれる。また、レーザ33が発生したレーザ光はスプリッタ34で分離され、光検出器4に導かれる。光検出器4は、スプリッタ34からの反射光とスプリッタ34で分離されたレーザ光によって検出値を出力し、各制御部ではレーザ光の合焦位置や、レーザ光のパワーを監視する。温度センサ5は、光ピックアップ3の温度を検出する。
【0017】
RF信号生成部7は、光ピックアップ3からの信号のアナログ処理(増幅、復調等)をする。
【0018】
サーボ制御部8は、フォーカスサーボ、トラッキングサーボ、スライドサーボを制御する。すなわち、フォーカスサーボは、アクチュエータ31を駆動することによって、レーザ光が光ディスク1面上にレーザ光が合焦するように対物レンズ32を制御する。トラッキングサーボは、光ピックアップ3が光ディスク1のトラックに追従するように制御する。スライドサーボは、光ピックアップを所定の位置に動かし、その位置を保つように制御する。
【0019】
レーザパワー制御部9は、光ディスク1に予め記録されたレーザ出力、又は、OPC(Optimum Power Control)によって決定されたレーザ出力に従って、レーザ光の出力強度を制御する。レーザドライバ10は、レーザ33を駆動するドライバ回路である。レーザドライバ10は、レーザパワー制御部9によって制御される。
【0020】
デコーダ11は、光ピックアップ3からの信号を、RF信号、トラッキングエラー信号、フォーカスエラー信号等として出力する。エンコーダ14は、光ディスク1に書き込むデータを生成する。
【0021】
制御部(マイコン)12は、光学ディスク装置の動作を制御する。例えば、レーザ33から出力されるレーザ光の強度を決めるOPC処理、記録動作中のレーザ光の出力の制御処理をする。メモリ13は、制御部12によって実行されるプログラム及びプログラムの実行に必要なデータを格納する。
【0022】
図2は、本発明のサーボ制御部8の機能ブロック図である。図2において、サーボ制御部8は、フォーカスサーボ系のみを示している。サーボ制御部8はフォーカスサーボ部80の他に、トラッキングサーボ、スライドサーボを行うが、以下の説明ではフォーカスサーボについて説明し、トラッキングサーボ及びスライドサーボについては公知または周知の制御を行うものとする。
【0023】
図2のサーボ制御部8は、光ディスク1からの反射光を受光した光検出器4から批点収差法によるフォーカスエラー信号を入力し、焦点のずれ量を演算し、このずれ量と所定のゲイン(例えば、フィードバックゲイン)から補償値を演算し、補償値に応じたアクチュエータ31の駆動信号値を出力して対物レンズ32を駆動してフィードバック制御を行うフォーカスサーボ部80を有する。
【0024】
また、サーボ制御部8は、光ディスク1を検出するとフォーカスサーボ部80のゲイン等の制御定数を決定するために、後述するように光ディスク1の面ぶれを考慮してフォーカスエラー信号を学習し、この学習値からゲインを決定する初期化部90を有する。
【0025】
フォーカスサーボ部80の構成は、光検出器4からのフォーカスエラー信号を入力して、レーザ光の合焦状態を検知し、レーザ光の焦点のずれ量を検出する偏差検出部81と、焦点のずれ量を入力して所定のゲインを含む制御定数から補償値を求める位相補償部82と、補償値を入力してアクチュエータ31の駆動信号値を出力する駆動部83と、からなる。
【0026】
初期化部90は、光ディスク1の検出時に当該光ディスク1の面ぶれ量を考慮した制御定数を決定する。なお、光ディスク1の検出時は、光学ディスク装置のトレー(図示省略)が操作されて光ディスク1が挿入された時等である。なお、偏差検出部81は合焦状態を検知する合焦検知部としても機能する。
【0027】
初期化部90は、光ディスク1が挿入されると所定の駆動パターンで対物レンズ32とディスクモータ2を駆動するように駆動部83とモータ駆動部6に指令を送出し、レーザ33の発光をレーザパワー制御部9に指令する。ここで、初期化部90が指令する駆動パターンは、例えば、対物レンズ32を光ディスク1に接近させた後に光ピックアップ3側へ引き戻す動作を所定の周期で繰り返すスイープ動作と、ディスクモータ2を所定の回転周波数で駆動する。
【0028】
初期化部90は、上記所定の駆動パターンで対物レンズ32とディスクモータ2を駆動している期間(初期化期間)中に、フォーカスエラー信号と対物レンズ32の位置を監視して、対物レンズ32の位置が所定の範囲内にあるときに、合焦状態を示すフォーカスエラー信号を学習値(制御常数を決定する基準値)として取得し、このフォーカスエラー信号の振幅値(またはフォーカスエラー信号の和信号の値)からフィードバックゲインなどの制御定数を決定する。制御定数を決定した後には、所定の駆動パターンによる対物レンズ32とディスクモータ2及びレーザ33の駆動を終了し、光ディスク1の読み書きに移行する。
【0029】
このため、初期化部90は、所定の駆動パターンで対物レンズ32とディスクモータ2及びレーザ33の駆動を指令する初期化駆動部93と、所定の駆動パターンで各部を駆動する初期化期間で光検出器4からのフォーカスエラー信号と、駆動部83からの駆動信号を監視し、対物レンズ32の位置が所定の範囲内にあるときに、合焦状態を示すフォーカスエラー信号を学習値として取得する学習部91と、学習部91が取得した学習値からフォーカスサーボの制御定数を演算し、位相補償部82に設定する制御定数設定部92と、を備える。
【0030】
初期化駆動部93は、光ディスク1の面ぶれ量の規格範囲を超えて対物レンズ32をスイープ動作させる。そして、学習部91は対物レンズ32の位置としてアクチュエータ31の駆動信号値を監視し、フォーカスエラー信号が合焦状態となったときに、対物レンズ32の位置が所定の範囲内であれば、フォーカスエラー信号の振幅値(または和信号の値)を学習値として取得する。制御定数設定部92は、予め設定した関数などにより、取得した学習値からフォーカスサーボの制御定数を決定する。
【0031】
図3は、サーボ制御部8の初期化部90で行われる制御の一例を示すフローチャートである。
【0032】
まず、初期化部90は、ステップS101でディスクモータ2を所定の回転周波数で駆動するようにモータ駆動部6に指令する。ステップS102では、初期化部90がアクチュエータ31に所定の周期でスイープ動作を行うように指令し、レーザパワー制御部9に対してレーザ33の照射を指令する。ステップS103では、合焦状態となった回数を計数するためのカウンタNの値を0にリセットする。
【0033】
上記ステップS101〜S102により、光ディスク1はディスクモータ2によって所定の回転周波数で回転を開始し、対物レンズ32の位置は、所定の周期で光ディスク1に対して接離を繰り返し、レーザ33の照射によって光検出器4が出力するフォーカスエラー信号は対物レンズ32の位置と光ディスク1の面ぶれに応じて合焦状態となる。
【0034】
次に、初期化部90は、ステップS104ではフォーカスエラー信号の振幅値(電圧)が0を挟んで変化して振幅値の絶対値が所定の閾値Th1を超えて合焦状態となったか否かを判定する。フォーカスエラー信号が合焦状態となったときにはステップS105に進み、合焦でない場合にはフォーカスエラー信号の監視を繰り返す。
【0035】
ステップS105では、初期化部90はアクチュエータ31の駆動信号値を対物レンズ32の位置として監視し、対物レンズ32の位置が所定の範囲内にあるか否かを判定する。すなわち、駆動信号の電圧を駆動信号値Vdとし、この駆動信号値Vdが第1の閾値Thv1以上、かつ第2の閾値Thv2以下のときに対物レンズ32の位置がフォーカス方向で所定の範囲内にあると判定する。なお、閾値Thv1<閾値Thv2に設定され、駆動信号値Vdと対物レンズ32の位置の関係は、例えば、駆動信号値Vd=Thv2のときに対物レンズ32が所定の範囲内で最も光ディスク1に近接した位置とし、駆動信号値Vd=Thv1のときには対物レンズ32の位置が所定の範囲内で光ディスク1から最も離れた位置とする。さらに、駆動信号値Vdの第1の閾値Thv1と第2の閾値Thv2を光ディスク1の面ぶれの規格範囲とすることができる。
【0036】
そして、このステップS105では、対物レンズ32の位置が所定の範囲内にあると判定したときにはステップS106に進んで、ステップS104で取得したフォーカスエラー信号の振幅値を学習値として取得する。さらに、ステップS107では、所定の関数などを用いて学習値からフォーカスサーボのフィードバックゲインなどの制御定数を演算して決定し、フォーカスサーボ系の位相補償部82に制御定数を設定して初期化期間を終了する。初期化期間が終了すると、初期化駆動部93は、対物レンズ32のスイープ動作を終了する。
【0037】
一方、ステップS105の判定で、駆動信号値Vdが所定の範囲Thv1〜Thv2内にないと判定された場合には、ステップS108に進んで、フォーカスエラー信号が合焦状態となった回数を示すカウンタNの値が所定の閾値ThNを超えたか否かを判定する。カウンタNの値が閾値ThNを超えていなければステップS109に進んでカウンタNの値をインクリメントしてからステップS104のフォーカスエラー信号の監視を繰り返す。
【0038】
一方、カウンタNの値が所定の閾値ThNを超えた場合には、ステップS110に進んで、初期化部90は、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1以上、かつ閾値ThR2以下であるか否かを判定する。なお、スイープ周波数は、対物レンズ32を光ディスク1に接近させてから遠ざけて、再び接近させる一周期(スイープ周期)の逆数とする。また、閾値ThR1は、例えば50%などに設定し、閾値ThR2は、例えば200%などに設定される。これにより、回転周波数とスイープ周波数が近似する領域、換言すれば、光ディスク1の合焦位置の変化が少ない状態であるか否かを判定する。
【0039】
ステップS110の判定で、回転周波数とスイープ周波数の比が所定の閾値ThR1以上で閾値ThR2以下と判定された場合には、光ディスク1の合焦位置の変化が少ない状態であるためステップS111に進んで、回転周波数とスイープ周波数の位相を変更する。一方、回転周波数とスイープ周波数の比が所定の閾値ThR1未満と判定された場合には、ステップS104へ戻ってフォーカスエラー信号の監視を続ける。
【0040】
ステップS111では、対物レンズ32のスイープ動作を一時的に停止して、スイープ周波数の位相を所定値(例えば、180°)だけずらす。次に、初期化部90は、ステップS112でカウンタNの値をリセットしてステップS104のフォーカスエラー信号の監視に復帰する。
【0041】
以上の処理により、フォーカスエラー信号が合焦状態となったときに、対物レンズ32の位置が所定の範囲内にあれば、フォーカスエラー信号の振幅値を学習値として取得して、この学習値からフォーカスサーボの制御定数を決定する。
【0042】
一方、フォーカスエラー信号が合焦状態となった回数が閾値ThNを超えても、対物レンズ32の位置が所定の範囲外の場合には、光ディスク1の回転周波数と対物レンズ32のスイープ周波数が近似している場合などが想定されるので、回転周波数の位相と、スイープ周波数の位相を相対的にずらすことで、フォーカスエラー信号が合焦状態となったときの対物レンズ32の位置と光ディスク1の位置の相対位置を変更し、対物レンズ32の位置が所定の範囲内でフォーカスエラー信号が合焦状態となるように回転周期とスイープ周波数の位相を制御する。
【0043】
図4〜図6は、上記初期化部90の制御による学習値の取得の様子を示すグラフである。図4〜図6は、それぞれ、対物レンズ32の位置[μm]、光ディスク1の位置[μm]、光ディスク1の面と、対物レンズ32のフォーカス方向での変位の相対速度[μm/sec]、フォーカスエラー信号の振幅値[mV]、和信号の値[mV]と時間の関係を示すグラフである。
【0044】
図4は、対物レンズ32のスイープ周期が、光ディスク1の回転周期に比して極めて長い例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR2を超える場合を示す。この例では、対物レンズ32のスイープ周期の一部のみを図示しており、対物レンズ32の位置は、光ディスク1に最も接近した後に、離れていく場合を示す。
【0045】
フォーカスエラー信号は、図中時刻T1〜T10で合焦状態となる。時刻T1〜T6にかけては、フォーカスエラー信号が合焦状態となるが、対物レンズ32の位置が所定の範囲内(Thv2とThv1)にないため、初期化部90は、これらのフォーカスエラー信号を学習値としては取得しない。これらの合焦状態では、光ディスク1の面の変位と、対物レンズ32の変位の相対速度が低いため、フォーカスエラー信号の振幅値は低い。これらの低い振幅値でフォーカスサーボの制御定数を決定してしまうと、前記従来例のようにフォーカスサーボ系が発振等を引き起こしてフォーカスサーボの追従性が低下するのである。
【0046】
この関係を、時刻T1、T2について説明すると、図4においては、時刻T1、T2の相対速度は他の時刻に比して「0」に近い。相対速度が「0」を挟んで「+」、「−」に符号が変化するのは、時間の経過と共に光ディスクと対物レンズ32の間の距離が接離の方向で逆転することを示す。相対速度の符号が逆転する箇所ではフォーカスエラー信号が最大あるいは最小に至ることなく合焦点を通過してしまうためである。
【0047】
一方、時刻T7〜T10で示す対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内では、合焦状態となったときの光ディスク1と対物レンズ32の相対速度は、所定の範囲外の場合に比して大きくなり、相対速度の増大に応じてフォーカスエラー信号の振幅値も本来の大きさとなる。初期化部90は、時刻T7の時点の合焦状態のフォーカスエラー信号の振幅値を学習値として取得する。したがって、振幅値の大きなフォーカスエラー信号が制御定数を決定するための値として得られるため、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。
【0048】
特に、駆動信号値Vdの第1の閾値Thv1と第2の閾値Thv2を、光ディスク1の面ぶれの規格範囲に設定することで、面ぶれが規格範囲を超える光ディスク1と、面ぶれが規格範囲内の光ディスク1を等しく扱うことができ、フォーカスサーボ系の制御定数を安定させて、対物レンズ32のフォーカス方向の追従性を確保することができる。
【0049】
なお、上記ではフォーカスエラー信号を学習値とする例を示したが、光検出器4の和信号を学習値として扱い、和信号から制御常数を決定することも可能である。
【0050】
図5は、対物レンズ32のスイープ周期と、光ディスク1の回転周期が近似している例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1以上、かつ閾値ThR2以下の場合を示す。
【0051】
この例では、時刻T1〜T4でフォーカスエラー信号が合焦状態となる。ここで、上記図3のフローチャートで閾値ThN=3とした場合、時刻T4で対物レンズ32の位置が所定の範囲外で合焦状態となった回数が閾値ThN=3を超えるため、対物レンズ32のスイープ動作を一時停止させてスイープ周期を180°変更する。そして、スイープ周期の変更後には、時刻T6で対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内で合焦状態となって、初期化部90は時刻T6のフォーカスエラー信号の振幅値を学習値として取得する。この時刻T6における光ディスク1の面と対物レンズ32の相対速度は、対物レンズ32の位置が所定の範囲外で合焦状態となったときに比して大きく、フォーカスエラー信号の振幅値も本来の大きさとなる。この振幅値が本来の大きさとなった学習値からフォーカスサーボの制御定数を決定することで、フォーカスサーボ系の追従性を向上させることができ、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。
【0052】
図6は、対物レンズ32のスイープ周期が、光ディスク1の回転周周期に比して極めて短い例を示し、ディスクモータ2の回転周波数と、対物レンズ32のスイープ周波数の比(回転周波数/スイープ周波数)が所定の閾値ThR1未満の場合を示す。この例では、光ディスク1の回転周期の一部のみを図示している。
【0053】
フォーカスエラー信号は、図中時刻T1〜T10で合焦状態となる。時刻T1〜T6にかけては、フォーカスエラー信号が合焦状態となるが、対物レンズ32の位置が所定の範囲内(駆動信号値がThv2とThv1の間)にないため、初期化部90は、これらのフォーカスエラー信号を学習値としては取得しない。これらの合焦状態では、光ディスク1の面の変位速度と、対物レンズ32の変位速度の相対速度が比較的低いため、フォーカスエラー信号の振幅値は前記の理由により小さい。これらの低い振幅値でフォーカスサーボの制御定数を決定してしまうと、前記従来例のようにフォーカスサーボ系が発振を引き起こす場合がある。
【0054】
一方、時刻T7〜T10で示す対物レンズ32の位置が所定の範囲(Thv1〜Thv2)内では、合焦状態となったときの光ディスク1と対物レンズ32の相対速度は、所定の範囲外の場合に比して大きくなり、相対速度の増大に応じてフォーカスエラー信号の振幅値も本来の大きさとなる。初期化部90は、時刻T7の時点の合焦状態のフォーカスエラー信号の振幅値を学習値として取得する。したがって、振幅値の大きなフォーカスエラー信号が制御定数を決定するための値として得られるため、面ぶれが規格の範囲を超える光ディスク1においても、学習値から得られるフォーカスサーボ系の制御定数は安定したものとなる。なお、上記ではフォーカスエラー信号を学習値とする例を示したが、光検出器4の和信号を学習値として扱うことも可能である。
【0055】
このように、本発明では、対物レンズ32の位置が所定の範囲内のときのフォーカスエラー信号の振幅値を制御定数を決定するための値として用いるようにしたので、面ぶれが規格の範囲外の光ディスク1においても、光ディスク1の面と対物レンズ32のフォーカス方向での相対速度が比較的高い領域で、フォーカスエラー信号を制御定数を決定する値として取得することで、振幅値として本来の大きさのフォーカスエラー信号で制御定数を決定することが可能となって、面ぶれが規格の範囲外の光ディスク1を利用する場合においても安定したフォーカスサーボを実現できるのである。
【0056】
なお、上記実施形態では、対物レンズ32の位置が所定の範囲内となったときのフォーカスエラー信号を用いたが、対物レンズ32の位置が所定の範囲内となってから所定回数のフォーカスエラー信号を取得し、これら複数のフォーカスエラー信号の振幅の平均値から制御定数を決定するようにしても良く、また、フォーカスエラー信号に変わって和信号の値から制御定数を決定するようにしてもよい。
【0057】
また、上記実施形態では、光ディスク1の回転周期と対物レンズ32のスイープ周期の位相を変更する際に、スイープ周期の位相を変更する例を示したが、ディスクモータ2の回転周波数を一時的に変更し、光ディスク1の回転周期の位相を変更するようにしてもよく、対物レンズ32のスイープ周期の位相と光ディスク1の回転周期の位相を相対的に変化させればよい。
【0058】
また、上記実施形態では、フォーカスエラー信号として非点収差法を用いる例を示したが、これに限定されるものではくフーコー法やスポットサイズ法などの公知の手法を適宜選択することができる。
【0059】
また、上記実施形態では、制御部12とサーボ制御部8が分離した構成を示したが、制御部12でサーボ制御部8を処理しても良い。
【0060】
また、上記実施形態では、学習部91で合焦の検知を行う例を示したが、偏差検出部81の合焦の検知結果を学習部91に送信するようにしてもよい。
【0061】
また、上記実施形態では、対物レンズ32の位置を示す値として、アクチュエータ31の駆動信号を用いたが、対物レンズ32のフォーカス方向における位置が把握可能な値であれば他の信号を用いるようにしてもよい。
【産業上の利用可能性】
【0062】
以上のように、本発明は面ぶれが規格の範囲外の光ディスクを使用する際にも安定したフォーカスサーボを実現可能な光学ディスク装置を提供することが可能となる。
【符号の説明】
【0063】
1 光ディスク
4 光検出器
8 サーボ制御部
31 アクチュエータ
32 対物レンズ
81 偏差検出部
82 位相補償部
83 駆動部
90 初期化部
91 学習部
92 制御定数設定部
93 初期化駆動部
【特許請求の範囲】
【請求項1】
光ディスクの回転を制御する回転制御部と、
前記光ディスクにレーザからのビームを照射する対物レンズと、
前記対物レンズを駆動して前記光ディスクに照射するビームの焦点をフォーカス方向で移動させるアクチュエータと、
前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、
前記アクチュエータを駆動して前記光学センサの検知信号から前記ビームの焦点を制御するサーボ制御部と、を備えた光ディスク装置において、
前記サーボ制御部は、
前記光学センサの検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータを駆動するフォーカスサーボ部と、
前記前記光学センサの検出信号を入力し、前記制御定数を決定する初期化部、とを有し、
前記初期化部は、
前記回転制御部に所定の回転周波数で前記光ディスクを駆動し、所定のスイープ周波数で前記アクチュエータを駆動する初期化駆動部と、
前記光学センサからの検知信号から前記ビームが前記光ディスクの所定の位置で結ばれたことを合焦状態として検知したときに、前記対物レンズの位置が所定の範囲内にある場合は、前記光学センサからの検知信号を前記アクチュエータを制御するための学習値として取得する学習部と、
前記取得した学習値から前記アクチュエータを駆動する制御定数を決定する制御定数設定部と、
を有することを特徴とする光学ディスク装置。
【請求項2】
前記検知信号は、フォーカスエラー信号を含み、
前記学習部は、前記アクチュエータを制御する学習値として前記フォーカスエラー信号を取得することを特徴とする請求項1に記載の光学ディスク装置。
【請求項3】
前記検知信号は、和信号とフォーカスエラー信号を含み、
前記合焦点検知部は、
前記和信号が所定の閾値を超え、フォーカスエラー信号が所定値となったときに合焦状態を判定し、
前記学習部は、前記アクチュエータを制御する学習値として前記和信号を取得することを特徴とする請求項1に記載の光学ディスク装置。
【請求項4】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記アクチュエータを駆動する前記スイープ周波数と前記光ディスクを駆動する前記回転周波数の位相を相対的に変更することを特徴とする請求項1に記載の光学ディスク装置。
【請求項5】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記アクチュエータを駆動する前記スイープ周波数の位相を変更することを特徴とする請求項4に記載の光学ディスク装置。
【請求項6】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記回転制御部に対して前記光ディスクを駆動する前記回転周波数の位相を変更する指令を送出することを特徴とする請求項4に記載の光学ディスク装置。
【請求項7】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にあり、かつ、前記アクチュエータを駆動する前記スイープ周波数と前記光ディスクを駆動する前記回転周波数の比が所定の範囲にあるときに前記位相を相対的に変更することを特徴とする請求項4に記載の光学ディスク装置。
【請求項8】
前記初期化駆動部は、前記アクチュエータに駆動信号を送信し、
前記学習部は、前記駆動信号を前記対物レンズの位置とすることを特徴とする請求項1ないし請求項7のいずれかひとつに記載の光学ディスク装置。
【請求項1】
光ディスクの回転を制御する回転制御部と、
前記光ディスクにレーザからのビームを照射する対物レンズと、
前記対物レンズを駆動して前記光ディスクに照射するビームの焦点をフォーカス方向で移動させるアクチュエータと、
前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、
前記アクチュエータを駆動して前記光学センサの検知信号から前記ビームの焦点を制御するサーボ制御部と、を備えた光ディスク装置において、
前記サーボ制御部は、
前記光学センサの検出信号を入力し、所定の制御定数に基づいて前記ビームが合焦状態となるように前記アクチュエータを駆動するフォーカスサーボ部と、
前記前記光学センサの検出信号を入力し、前記制御定数を決定する初期化部、とを有し、
前記初期化部は、
前記回転制御部に所定の回転周波数で前記光ディスクを駆動し、所定のスイープ周波数で前記アクチュエータを駆動する初期化駆動部と、
前記光学センサからの検知信号から前記ビームが前記光ディスクの所定の位置で結ばれたことを合焦状態として検知したときに、前記対物レンズの位置が所定の範囲内にある場合は、前記光学センサからの検知信号を前記アクチュエータを制御するための学習値として取得する学習部と、
前記取得した学習値から前記アクチュエータを駆動する制御定数を決定する制御定数設定部と、
を有することを特徴とする光学ディスク装置。
【請求項2】
前記検知信号は、フォーカスエラー信号を含み、
前記学習部は、前記アクチュエータを制御する学習値として前記フォーカスエラー信号を取得することを特徴とする請求項1に記載の光学ディスク装置。
【請求項3】
前記検知信号は、和信号とフォーカスエラー信号を含み、
前記合焦点検知部は、
前記和信号が所定の閾値を超え、フォーカスエラー信号が所定値となったときに合焦状態を判定し、
前記学習部は、前記アクチュエータを制御する学習値として前記和信号を取得することを特徴とする請求項1に記載の光学ディスク装置。
【請求項4】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記アクチュエータを駆動する前記スイープ周波数と前記光ディスクを駆動する前記回転周波数の位相を相対的に変更することを特徴とする請求項1に記載の光学ディスク装置。
【請求項5】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記アクチュエータを駆動する前記スイープ周波数の位相を変更することを特徴とする請求項4に記載の光学ディスク装置。
【請求項6】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にある場合は、前記回転制御部に対して前記光ディスクを駆動する前記回転周波数の位相を変更する指令を送出することを特徴とする請求項4に記載の光学ディスク装置。
【請求項7】
前記学習部は、
前記合焦検知部が前記合焦状態を検知したときに、前記対物レンズの位置が所定の範囲外にあり、かつ、前記アクチュエータを駆動する前記スイープ周波数と前記光ディスクを駆動する前記回転周波数の比が所定の範囲にあるときに前記位相を相対的に変更することを特徴とする請求項4に記載の光学ディスク装置。
【請求項8】
前記初期化駆動部は、前記アクチュエータに駆動信号を送信し、
前記学習部は、前記駆動信号を前記対物レンズの位置とすることを特徴とする請求項1ないし請求項7のいずれかひとつに記載の光学ディスク装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−211850(P2010−211850A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−54832(P2009−54832)
【出願日】平成21年3月9日(2009.3.9)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月9日(2009.3.9)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
[ Back to top ]