
光学マウス
広範囲の表面上において運動を追跡するように構成された光学マウスを開示する。一実施形態では、光学マウスは、可視光スペクトルの青色領域内またはその付近に波長を有する光を放出するように構成されている光源と、追跡面によって反射された光の分布の内正反射部分からの光が画像センサに向けられるように、光源に対して位置付けされている画像センサと、画像センサからの画像データを受信し、画像データにおいて追跡構造を特定するように構成されているコントローラとを含む。
【発明の詳細な説明】
【背景技術】
【0001】
光学コンピューター・マウスは、光源および画像センサを用いて、下地にある追跡面に対するマウスの移動を検出することにより、ユーザーに計算機のディスプレイ上において仮想ポインタの位置を操作させる。今日大まかに2種類の光学マウス・アーキテクチャが用いられており、それらは傾斜LED(oblique-LED)アーキテクチャおよびレーザー・アーキテクチャである。これらのアーキテクチャの各々は、光源を用いて下地の追跡面上に向けて光を発射し、画像センサを用いて追跡面の画像を取り込む。移動を追跡するには、一連の表面の画像を取り込み、コントローラを通じてこれらの画像において識別される1つ又は複数の表面構造の位置(群)の変化を追跡する。
【0002】
傾斜LED光学マウスは、発光ダイオード(LED)からの非コヒーレント光を追跡面に向けて傾斜した視射角で発射し、追跡表面から散乱する光を、反射光に対して傾斜した角度に配置された画像検出器によって検出する。表面画像のコントラストは、表面の高さ変動によって生ずる陰影によって強調されるので、表面上にある追跡構造を区別することが可能になる。
【0003】
対照的に、レーザー光学マウスは、一般に赤外線または赤色波長領域のコヒーレント光ビームを追跡面上に発射することによって動作する。追跡面の画像は、正反射角または近正反射角(near-specular angle)で検出する。表面画像のコントラストは、低周波表面変動による鏡面反射の結果として得られる。また、反射するレーザー光における干渉パターンによっても、コントラストが生ずることもある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これらのアーキテクチャの各々は総合的にはある範囲の表面上では満足のいく性能を発揮するが、各々特定的な表面の種類や組織では満足できない挙動を呈する場合もある。例えば、傾斜LED光学マウスは、紙やマニラ紙の封筒のような荒い表面上では優れた動作を行う。何故なら、これらの表面から散乱する散乱光が豊富にあり、傾斜して位置付けられた検出器がこの散乱光を検出することができるからである。しかしながら、傾斜LED光学マウスは、ホワイト・ボード、光沢のあるセラミック・タイル、大理石、研磨/塗装した金属等のような、光沢面上では同様に動作できない場合もある。何故なら、斜入光の殆どは正反射角で反射してしまい、検出器に達する光は殆どないからである。
【0005】
同様に、レーザー光学マウスは、荒い表面、特に、事務所環境において共通して見られる白色コピー用紙のような繊維面上ではさほど良い動作を行わない。レーザーは異なる深さで紙の繊維と相互作用するので、その結果得られるナビゲーション画像は、干渉パターンを内包する場合があり、このために相関長が短い画像構造 (image feature)となり、相関付けができず、マウス追跡に誤動作が生ずる虞れがある。
【課題を解決するための手段】
【0006】
摘要
したがって、本明細書では、広い一続きの表面上で巧みに追跡するように構成された光学マウスの実施形態について記載する。開示する一実施形態では、光学マウスは、可視光スペクトルの青色領域内またはその付近に波長を有する光を追跡面に向けて放出するように構成されている光源と、追跡面によって反射された光の分布の内正反射部分からの光が画像センサに向けられるように、光源に対して位置付けされている画像センサと、画像センサからの画像データを受信し、画像データにおいて追跡構造(tracking feature)を特定するように構成されているコントローラとを含む。
【0007】
この摘要は、詳細な説明において以下で更に説明する概念から選択したものを、簡略化した形態で紹介するために設けられている。この摘要は、特許請求する主題の主要な特徴や必須の特徴を特定することを意図するのではなく、特許請求する主題の範囲を限定するために用いることも意図していない。更に、特許請求する主題は、本開示の任意の部分に記されている任意の欠点または全ての欠点を解決する実施態様に限定されるのでもない。
【図面の簡単な説明】
【0008】
【図1】図1は、光学マウスの一実施形態を示す。
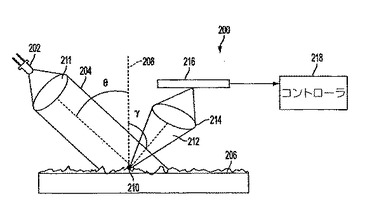
【図2】図2は、図1の光学マウスの光学アーキテクチャの一実施形態を示す。
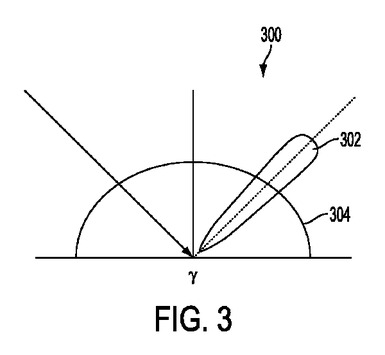
【図3】図3は、表面から反射した光の分布の反射成分および拡散成分の例を図示するグラフを示す。
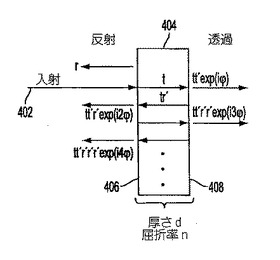
【図4】図4は、透過性誘電体スラブに入射する光の反射および透過を示す。
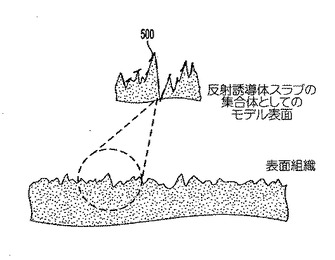
【図5】図5は、追跡面の模式モデルを、誘電体スラブの集合体として示す。
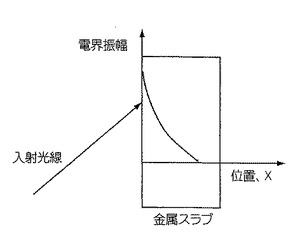
【図6】図6は、金属面上に入射する光ビームの貫入深度を示す。
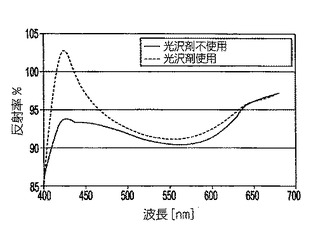
【図7】図7は、光沢剤がある場合とない場合における白色紙の反射率を比較したグラフを示す。
【図8】図8は、用紙における多数の繊維層から反射する光の入射ビームについて、簡略化した反射モデルを示す。
【図9】図9は、白色紙の表面を横切ってマウスを移動させた際における、レーザー・マウス画像検出器全域における画像の相関の模式図を示す。
【図10】図10は、白色紙の表面を横切ってマウスを移動させた際における、青色非コヒーレント光学マウス画像検出器を横切る画像の相関の模式図を示す。
【図11】図11は、追跡面を横切る光学マウスの運動を追跡する方法を図示するプロセス・フローを示す。
【発明を実施するための形態】
【0009】
図1は、光学マウス100を示し、図2は、光学マウス100の光学アーキテクチャ200の一実施形態を示す。光学アーキテクチャ200は、光ビーム204が位置210において追跡面上に入射するために、光ビーム204を追跡面206に向けて放出するように構成されている光源202を備えている。光ビーム204は、追跡面206の法線208に対して入射角θを有する。更に、光学アーキテクチャ200は、光源202と追跡面206との間に配置され、光ビーム204を平行化するコリメート・レンズ211も備えることができる。
【0010】
光源202は、可視スペクトルの青色領域内またはその付近の光を放出するように構成されている。「可視スペクトルの青色領域内またはその付近」、ならびに「青色」、「青色光」等の用語は、本明細書において用いる場合、可視光スペクトルの青色領域内またはその付近、例えば、400から490nmの範囲において1つ又は複数の放出線または放出帯を備えている光を記述するものとする。また、これらの用語は、光沢剤を活性化することができる近UVまたは近緑色領域内における光を記述することもできる。これについては、以下で更に詳しく説明する。
【0011】
種々の実施形態において、光源202は、非コヒーレント光またはコヒーレント光を出力するように構成することができ、更に1つ又は複数のレーザー、LED、OLED(有機発光デバイス)、狭帯域幅LED、またはその他の適した発光デバイスであればいずれでも利用することができる。更に、光源202は、外見が青色である光を放出するように構成することもでき、または観察者には青色以外の外観を有する光を放出するように構成することもできる。例えば、白色LED光源は、青色LEDダイ(例えば、InGaNで形成する)を、他の色のLEDとの組み合わせ、あるいはセリウムをドープしたイットリウム・アルミニウム・ガーネットのようなシンチレータまたは発光体との組み合わせ、あるいは他の波長の光を放出するその他の構造との組み合わせのいずれかと共に利用すれば、ユーザーには白色に見える光を生成することができる。更に別の実施形態では、光源202は、青色光を通過させる帯域通過フィルタと組み合わせた汎用広帯域光源を備えている。このようなLEDは、これらの構造から放出される光の中に青色波長があることから、本明細書において用いられる「青色光」の意味に該当する。
【0012】
引き続き図1において、入射光ビーム204のある部分は、212で示すように、追跡面206から反射し、入射角θに等しい正反射角(specular reflection angle)γを中心として分布する。反射光212の一部は、レンズ214によって画像センサ216上に撮像される。図1に示すように、画像センサ216は、正反射角またはほぼ正反射角で位置付けられており、反射光212の分布の正反射部分における光の少なくとも一部を検出するようになっている。以下で説明するように、正反射角において反射光を検出するように位置付けられた画像検出器と組み合わせて青色光源を用いることにより、他の光学アーキテクチャに勝る種々の利点を提供することができる。
【0013】
画像センサ216は、画像データをコントローラ218に供給するように構成されている。コントローラ218は、画像センサ216から複数の画像データの時間連続フレームを取り込み、この画像データを処理して、追跡面の複数の時間連続画像において1つ又は複数の追跡構造を突き止め、追跡面の複数の時間連続画像の位置(群)の変化を追跡して、光学マウス100の運動を追跡するように構成されている。表面構造(surface feature)の突き止めおよび追跡は、適した様式であればそのいずれでも実行することができ、本明細書ではこれ以上詳しく説明しない。
【0014】
反射光分布の正反射部分(specular portion)における光を検出するように構成した場合、画像センサ216は、表面からの正反射の断片(patches)を検出することができ、これらは表面の画像上における明るい断片のように見える。対照的に、傾斜して配置した検出器は、追跡面の画像において、反射の断片ではなく、陰影を検出するために用いられるのが一般的である。したがって、画像センサ216を正反射構成にしたときの方が、このセンサを傾斜構成にしたときよりも多くの光がセンサに到達するので、正反射光において画像を検出することにより、マウス100の高速移動の間に、積分時間(integration time)を短縮し、追跡の精度を高めることが可能になる。また、積分時間の短縮によって、光源を「オン」で駆動する時間も短縮することができ、これによって、光源が引き込む電流を、時間の関数として削減し、バッテリの寿命を延ばすことができる。更に、正反射またはほぼ正反射の画像センサ構成を用いることにより、低い電力の光源を用いることも可能となり、更にバッテリの寿命を延ばすのに寄与することができる。
【0015】
画像センサ216に到達する光の量を増大させると、積分時間の短縮および消費電力低減の他にも、別の利点を提供することができる。例えば、光学系の被写体深度は、当該系の絞りに反比例する。単位時間当たりに検出器に到達する光量が多い程、光学系の絞りを小さくすることができ、これによって光学系の被写体深度を高め、画像における光学収差を低減することにより撮像性能を向上させることができる。したがって、画像センサ216に対する追跡面206の高さは、被写体深度が大きい程、性能の損失なく、大きな幅で変動させることが可能になる。これによって、傾斜アーキテクチャ系の製造における許容度と比較して、画像センサ216および付随するレンズ214の相対的高さ/位置決めに関する製造許容度を緩和することが可能となり、したがって製造コスト低減に繋げることができる。
【0016】
光204の入射ビームが追跡面206となす角度は、適した角度であればいずれにでも設定することができる。実施形態によっては、光204の入射ビームは、追跡面の法線に対して比較的鋭い角度を有するように構成するとよい場合もある。これによって、マウスにおける光源202および/または画像センサの相対的な水平および垂直位置決めに関する製造許容度を緩和することが可能となる。何故なら、これらの部品の位置決めにおける誤差は、採用する入射光の角度を浅くする(平行に近付ける)場合と比較して、追跡面上で光ビームの中心とする位置210におけるオフセット(offset)の度合いにはさほど影響がないと思われるからである。適した角度の例には、追跡面の法線に対して0から40度の範囲の角度が含まれるが、これに限定されるのではない。
【0017】
図3は、追跡面から反射する光の分布300のプロットの一例を示す。分布300は、正反射分布成分302と、拡散分布成分304とを含み、これらが組み合わされて分布300が生ずる。拡散成分は、追跡面に入り多数回の反射および開設を受けた光線の散乱によって発生する。正反射成分は、対照的に、入射光線の1回の反射によって発生する。表面は、複数の平面反射要素から成り、各要素がそれ自体の方位を有すると考えることができる。その結果、生ずる反射は正反射方向を中心として分布し、分布の正反射成分の幅が表面粗さの関数となる。正反射成分302および拡散分布成分の相対的な寄与は、追跡面の特質に応じて様々な変化を呈する可能性があるが、一般に、分布300は、正反射角度γまたはその付近において最大光強度を有し、正反射角度γから離れるに連れて強度が低くなる。表面の欠点または吸収がない完全な鏡面の場合、入射光の100%が正反射角度で反射する。図3に示すように、紙、金属、および木材のような極普通の非鏡面からの反射光は、正反射角度またはその付近において、分布の他の地点よりも高い強度を有する。本明細書において用いる場合、「反射光の分布の正反射部分」という用語は、鏡面状正反射の方向(「正反射軸」)から±20度以内にある、散乱光の分布の部分を指すこととする。
【0018】
画像センサ216は、正反射角に対して適したいずれかの角度で光を検出するように構成されている。一般に、光の強度は正反射角において最高となることができる。しかしながら、画像センサの感度のような、他の要因によっては、正反射角からは外れてはいるものの、なおも反射光の正反射部分以内に検出器を配置することが奨励される場合もある。金属反射面からカーペットおよび繊維の表面までに及ぶ広範囲の表面上における運動を検出するように構成されている画像センサでは、適した検出器の角度は、正反射角から±20度の角度が含まれるがこれに限定されるのではない。
【0019】
前述のように、可視スペクトルの青色領域内またはその付近において光を放出する光源を用いると、LEDおよびレーザー・マウスにおいて普通に用いられている赤色および赤外線光源に勝る利点を提供することができる。これらの利点は、青色光源ではなく赤色または赤外線光を選択するに至ったと考えられる他の要因のためにこれまで認められておらず、したがって、青色光源の使用によって提供される便益は期待されていないこともある。例えば、現在入手可能な青色光源は、現在入手可能な赤色および赤外線光源よりも電力消費量が多く、コストが高く、これによって、光学マウスにおける光源として青色光源の選択から遠ざかっていた可能性がある。
【0020】
本明細書において定める青色光によって提供される利点は、少なくとも部分的に、赤色および赤外線光と比較して、青色光の反射面との物理的相互作用の特質から得られる。例えば、青色光は、赤色および赤外線光よりも、誘電体表面の反射強度が高い。図4を参照すると、この図は、可視光に対して透過性であり、厚さがd、屈折率がnの材料で作られた誘電体スラブ404からの入射光ビーム402の反射を示す。図示のように、入射光ビーム402の一部は、スラブの表面406で反射し、光の一部はスラブ404の内部を貫通して透過する。透過した光は、スラブの背面408に至り、光の一部は背面408を貫通して透過し、一部は反射して前面406に向かって戻ってくる。前面に入射した光は、再度部分的に反射し、部分的に透過する等となる。
【0021】
入射光402のビームにおける光は、真空波長λを有する。反射係数または振幅をrで示し、透過係数または振幅をtで表すと、スラブ404の表面406において、次のようになる。
【0022】
【数1】

【0023】
【数2】
【0024】
スラブの背面408では、r’で示す、対応する反射係数、およびt’で示す透過係数は、次のようになる。
【0025】
【数3】
【0026】
【数4】
【0027】
尚、反射係数および透過係数または振幅は、スラブ404の屈折率のみに依存することを注記しておく。入射光ビームが表面の表線に対してある角度で表面に当たると、振幅の方程式は、フレネルの方程式に応じて、角度の関数となる。
【0028】
スラブ404の屈折率が、スラブ404を取り巻く空気の屈折率とは異なることによって誘発する位相ずれφは、以下のように示される。
【0029】
【数5】
【0030】
透過位相ずれを考慮に入れて、全ての部分的反射および透過の振幅を総計すると、スラブの総反射および透過係数または振幅について、以下の式が得られる。
【0031】
【数6】
【0032】
【数7】
【0033】
【数8】
【0034】
【数9】
【0035】
小さなスラブの厚さdに限定すると、反射振幅の式は、一層簡単な形式に縮小する。
【0036】
【数10】
【0037】
この限定の下では、反射光場が入射光場よりも90度位相進みとなり、その振幅は1/λおよび誘電体の分極率 (n2−1)の双方に比例する。散乱する振幅の1/λ依存性は、反射光の強度が振幅の二乗に比例するので、薄い誘電体スラブからの反射光は1/λ2に比例することを表す。つまり、反射光の強度は、短い波長の光の方が長い波長の光よりも高い。
【0038】
光学マウスの観点からは、図5を参照すると、そして図3を参照して先に説明したように、追跡面は、誘電体スラブ500の形態で多数の反射要素を備えており、その各々が表面の局所的高さおよび傾きに応じて方位付けられているものとしてモデル化することができる。これらの誘電体スラブの各々は入射光を反射し、反射光は撮像レンズの開口数内に入るときには、検出器上に明るい構造が得られ、それ以外のときには光がレンズによって取り込まれず、検出器には暗い構造が得られる。470nmの青色における動作では、明るい構造において反射光の強度が、850nmの波長を有する赤外線光よりも8502/4702≒3.3倍強くなり、630nmの波長を有する赤色光よりも6302/4702≒1.8倍強くなる。このため、検出器における青色光の画像のコントラストが向上する。何故なら、検出器上の明るい構造は、対応する赤色画像または赤外線画像においてそれらが見える場合よりも明るくなるからである。これらのコントラストが高くなった画像によって、光源の強度が低くても、追跡構造の容認可能な識別、および追跡のロバスト性向上が可能となり、したがって、電力消費を低減しバッテリ寿命を延ばしつつも、赤外線マウスまたは赤色光マウスに対して、追跡性能を向上させることができる。
【0039】
図6は、光学マウスにおける青色光の使用による、赤色または赤外線光に勝る、青色光の貫入深度が赤色または赤外線光のそれよりも少ないという別の利点を示す。一般に、表面に入射する放射線の電界は、表面を貫通してある程度まで達する。図6は、金属スラブ内部における電界の振幅を、深度の関数として簡単に示す図である。図示のように、入射光ビームの電界は、金属スラブ内部では、指数的に減衰し、特性e−フォールディング距離(characteristic e-fold distance)が波長に比例する。この波長依存性を想定すると、赤外線光は、青色光よりも1.8倍金属材料内に進入する可能性がある。また、青色光が非金属の誘電体表面に入射するときにも、短い貫入深度が発生するが、正確な貫入深度は、材料の特性に依存する。
【0040】
赤色および赤外線光と比較して青色光の貫入深度が少ないことは、光ナビゲーション用途の観点から、様々な理由により利点となる可能性がある。第1に、追跡構造を追従するためにコントローラが用いる画像相関方法は、下地のナビゲーション面と1対1に対応する画像を必要とする場合がある。表面内部において異なる深度から反射する光があると、相関計算を混乱させる虞れがある。更に、材料内に漏入する光のために、画像検出器に到達する反射光が減少する。
【0041】
加えて、青色光の貫入深度の方が少ないことが望ましいのは、検出器における隣接画素間およびほぼ近隣する画素間におけるクロストークの低減、および変調伝達関数(MTF)の向上につながり得るからである。これらの効果を理解するために、波長が長い赤外線光子と波長が短い青色光子とがシリコンCMOS検出器に入射した場合における相違について検討する。半導体における光子の吸収は、波長に依存する。波長が短い光では吸収は多いが、長い波長では、バンド・ギャップ・エネルギに近づくので、吸収は減少する。吸収が少ない程、波長が長い光子は波長が短い青色光子よりも半導体内部で遠くまで進行し、対応して材料内部で発生する電荷は、波長が短い青色光子によって対応して生成される電荷よりも遠くまで進行して、収集されるはずである。進行距離が長い程、長波長光からの電荷キャリアは、青色光子よりも多く材料内で拡散し広がる可能性がある。このため、1つの画素内部で発生する電荷が、近隣画素において偽信号を生成する虞れがあり、電光システムにおいてクロストーク発生、およびMTF転化 (reduction)が生ずる結果となる。
【0042】
青色光の使用による、他の光源に勝る更に別の利点として、青色光は、赤外線または赤色光よりも小さい追跡構造を解明することができる。一般に、光学撮像システムが解明することができる最も小さい構造は、回折によって制限される。レイリーの基準では、表面構造のサイズdは、同じサイズの隣接する物体から区別することができる場合、d≧λ/NAという関係で与えられると述べられている。ここで、λは入射光の波長であり、NAは撮像システムの開口数である。dおよびλ間の比例関係から示されるのは、青色光は、それよりも長い波長の光よりも、小さな表面構造が解明可能であるということである。例えば、λ=470nmで動作しf/l光学素子を有する青色マウスは、約2λ≒940nmのサイズまでの構造を撮像することができる。850nmで動作する赤外線VCSEL(縦型空洞表面放出レーザー)では、撮像可能な最小構造サイズは、1.7μmまで増大する。したがって、青色光の使用により、しかるべき画像センサおよび光学素子によって、一層小さい追跡構造を撮像することが可能となる。
【0043】
また、青色光は、種々の具体的な表面上において、他の波長の光よりも高い反射率を有することもある。例えば、図7は、可視スペクトル全域で光沢剤がある場合およびない場合における、白色紙の反射率のグラフを示す。「光沢剤」とは、紙を白くそして「きれいに」見せるために、多くの種類の紙に添加される蛍光染料である。図7は、光沢剤を有する白色紙が、可視光スペクトルの青色領域内またはその付近において、当該スペクトルの他の様々な領域よりも比較的多く反射することを示す。したがって、可視光スペクトルの青色領域内またはその付近における光をマウスの光源として用いると、光沢剤を含む表面上や、その他のこのような蛍光性または反射強化追跡面上において用いるときに、相乗効果を得ることができ、これによってこのような表面におけるマウスの性能を、他の表面におけるよりも非常に改善することができる。
【0044】
このような効果は、種々の使用想定場面において利点を提供することができる。例えば、携帯用マウスに共通の使用環境に会議室がある。多くの会議室のテーブルは、ガラスで作られており、ガラスは一般に光学マウスの挙動にとっては劣った表面となる。ガラスのような透過性表面上におけるマウスの性能を向上させるために、ユーザーは間に合わせのマウス・パッドとして用いるために、透過性表面上に1枚の紙を置けばよい。したがって、紙が光沢剤を含む場合、他の表面を用いる場合と比較して、マウス性能における相乗効果を実現することができ、電力消費低減、したがってバッテリで動作するマウスであればバッテリの長寿命化を図ることができる。
【0045】
性能における同様の相乗効果も、可視スペクトルの青色部分内またはその付近の光に晒したときに、反射率、蛍光または燐光放出というような、光沢強化特性を有するように他の表面を処理するまたは準備することによって得ることができる。例えば、マウス・パッドまたはその他のマウス追跡専用面が、青色領域において高い反射率を有する材料、および/または青色領域において入射光および蛍光または燐光を吸収する材料のような、光沢強化剤を含むとよい。青色光マウスと共に用いると、このような材料は、このような反射または蛍光面がない表面よりも、コントラストを高めることができ、これによって高い追跡性能、低電力消費等を得ることができる。
【0046】
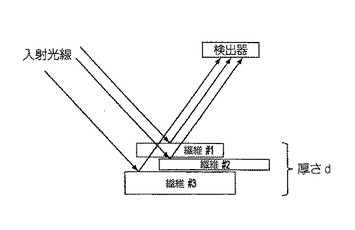
紙のような追跡表面の中には、コヒーレント光源ではなく、非コヒーレント光源を使用する方が、利点が得られる場合もある。例えば、図8は、光学マウスからの光が通常のコピー用紙から反射した場合の簡略化したモデルを示す。紙の微視的構造は、繊維の積層構造となっており、繊維の一部の間に空隙がある。長い波長のレーザー光は、紙の表面に入り多数の層を貫通した後に反射する。これは、図8において、紙の中にある3つの異なる繊維層からの光の反射として示されている。
【0047】
この環境では、850nmで動作し、線幅が約Δλ<0.1nmのレーザーは、
【数11】
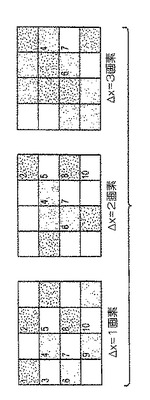
のコヒーレント長を有する。この簡略化したモデルでは、3本の入射光線束の各々が検出器において干渉して、干渉パターンを作る。この単純なモデルを、大きな紙面上に広がるより多くの光線に拡大すると、複雑な干渉パターンが得られる。前述の複雑なレーザー干渉パターンは、異なる深さにある繊維からの反射によって生じ、図9に示すような、非常に短い相関長の画像シーケンスを作成することができる。画像の内容は、一般に高周波であり、検出器のナイキスト限界よりも上の追跡構造の大きな断片(fraction)を有する可能性がある。ナビゲーション・アルゴリズムの中には、マウスの運動を判断する際に、画像シーケンスについて相関計算を実行するものもある。短い相関長を有するために、画像に含まれる特徴が素早く「消失」し、多数の隣接する画像にわたって存続しない場合、相関計算は、もはやマウスの運動について信頼性のある推定値を求めることは事実上不可能となる。加えて、相関長が長い画像ストリームは、現在マウスにおいて用いられているアルゴリズムよりも、潜在的に一層単純なアルゴリズムでも受け入れるので有利である。単純なアルゴリズムおよび計算の削減により、電力の節約およびバッテリの長寿命化を可能とすることができる。これによって、例えば、異なるソフトウェア・フィルタ係数間で切り換えるというような回避すべき、複雑なアルゴリズムの採用を受け入れることもできる。
【0048】
白色紙上で動作するレーザー・マウスの場合、相関長が、検出器の1つの画素の長さ(30〜50μm)以下となることがあり、結果的に追跡性能が損なわれる。例えば、再度図9を参照すると、この図は、白色紙上で追跡しているレーザー・マウスの検出器における画像の4×4画素の小領域の一例を示す。マウスを移動させると、高周波画像構造の相関が急速に失われる。表面を3画素移動させた時点では、本来10個ある追跡構造の内3つしか現れない。
【0049】
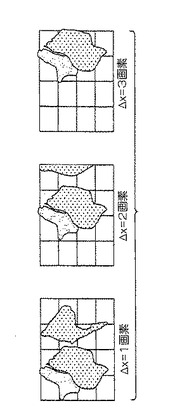
レーザー光源とは対照的に、青色LEDは、波長が470nm、線幅Δλが約30nmの光を放出し、そのコヒーレント長は遥かに短く、約7μmである。このレーザー光源よりもコヒーレント長が短いということは、異なる深さで紙の繊維から反射した光線が、検出器において干渉パターンを形成しないことを意味する。したがって、図10に示すような、青色非コヒーレント光源を用いることにより、数十画素という画像相関長も可能となる場合がある。加えて、これらの構造の空間周波数は、無理なく検出器のナイキスト限界未満に納まり易くなる。この種の長い相関長を有する画像シーケンスを分析し、基礎となる表面の運動のロバストな推定値を抽出するために、相関アルゴリズムを正しく適応させることができる。
【0050】
尚、青色コヒーレント光の使用により、スペックル・サイズに関して、赤色または赤外線光を用いた場合よりも勝る同様の利点が得られることは認められよう。スペックル・サイズは波長に比例するので、青色コヒーレント光は、赤色または赤外線いずれのレーザー光源よりも小さいスペックルを発生する。レーザー・マウスの実施形態の中には、可能な限り最も小さいスペックルを有することが望ましい場合がある。何故なら、スペックルは有害なノイズ源であり、追跡性能を低下させるからである。青色レーザーは、比較的小さなスペックル・サイズを有し、したがって、所与の画素において、赤色または赤外線レーザーよりも多くの青色スペックルがその面積を専有する。このため、画像におけるスペックル・ノイズを平均化によって解消し易くなり、追跡が改善する結果となる。
【0051】
青色光のコヒーレント長の方が短いことにより、他の利点も同様に得ることができる。例えば、青色光を利用する光学マウスは、塵、システム光学素子における成型欠陥、そしてその他のこのような固定干渉パターンの原因に対して、レーザー・マウスよりも感度が低いと考えられる。例えば、レーザー・マウスの平行化レンズ上に10μmの塵粒子が付着している場合、コヒーレントなレーザー光はこの塵粒子の周囲で回折し、検出器には高コントラストの環状リング(circular rings)が現れる。これらのリング(およびその他のこのような干渉パターン)があると、レーザー・マウスの追跡に問題が生ずる虞れがある。これは、検出器に提示される高いコントラストの固定パターンが、相関関数において余分なピークを生じさせ、これが移動しないからである。同様の理由で、レーザー・マウスの製造では、射出成型されるプラスチック光学素子の品質に対して、厳しいプロセス制御が要求される。何故なら、プラスチックにおける欠陥が、画像ストリームにおいて有害な固定パターンを発生させる虞れがあるからである。
【0052】
青色光の使用により、このような固定パターンに伴う問題を低減または回避するのに役立つこともある。コヒーレント光が塵粒子のような小さい粒子(この場合における「小さい」とは、大まかに光の波長のサイズの波長を示す)に衝突すると、光はその粒子の周囲で回折し、リング形状の干渉パターンを生ずる。中心にあるリングの直径は、以下の関係で与えられる。
【0053】
直径=2.44(λ)(f/#)
【0054】
したがって、この関係によれば、青色光の方が赤色または赤外線光よりも小さいリングを生じ、画像センサは小さい方の固定パターン・ノイズ源を感知する。一般に、検出器が感知する固定パターンが大きい程、そして一時的に変化していない検出器の画素が多い程、動いていない画像構造によって相関計算が支配されていく可能性があるので、ナビゲーションは悪化する。更に、非コヒーレント光では、回折の効果が目立つ距離は一層短くなる。
【0055】
青色正反射撮像アーキテクチャ(blue specular imaging architecture)の更に別の利点は、小さな形状係数での光機械パッケージング、小さなz−高の低コスト・モジュールを可能にすることである。光学追跡長が短いナビゲーション・デバイスは、空間が貴重となる、複雑な工業設計による移動体電話機またはデザイナー・マウス(designer mice)のような用途では望ましい。従来の赤色LEDマウスは、傾斜照明および陰影撮像の要件のために、パッケージの体積が比較的大きくなっている。従来のレーザー・マウスでは、典型的なVCSELレーザー源の発散角が比較的小さいために、追跡距離が短い光学系では、製造許容度を受け入れられるような十分に大きなサイズで、平行化したレーザー・ビームを得ることが困難となる。スペックル物理学(speckle physics)に基づくレーザー・マウスも、小さなz−高さでは問題となる。何故なら、スペックル・サイズ(〜光学f/#)は検出器における照度
【数12】
とのトレードオフとなるからである。
【0056】
以上に述べた物理的特性に鑑みて、青色光の使用は、光学マウスにおいて、赤色光または赤外線光の使用に勝る種々の利点を得ることができる。例えば、赤色または赤外線光と比較して青色光の反射率が高く貫入深度が浅いことにより、強度が低い光源の使用が可能となり、これによって潜在的にバッテリ寿命を延ばすことができる。これは、光沢剤を添加した白色紙上でマウスを動作させるときに特に有利となり得る。何故なら、光沢剤の蛍光の強度は、可視スペクトルの青色領域では強くなることがあるからである。更に、光学的に同等の(即ち、レンズ、f−ナンバー、画像センサ等)光源からの赤色光と比較して青色光のコヒーレント長が短く回折限度が小さいことにより、赤色光よりも長い画像構造の相関長および精細な表面構造を解明することが可能となり、したがって、一層多種多様な表面上において正反射非コヒーレント青色光マウスを使用することが可能になる。正反射青色LED光学マウスのための追跡面として用いることができる表面の例には、紙の表面、繊維の表面、セラミック、大理石、木材、金属、花崗岩、タイル、ステンレス鋼、ならびに、ベルベル(Berber)およびディープ・シャグ(deep shag)を含むカーペットが含まれるが、これらに限定されるのではない。
【0057】
更に、実施形態によっては、CMOSセンサのような画像センサを、可視スペクトルの青色領域において高い感度(即ち、量子効率)を有するように特定的に構成し、これを青色光源と組み合わせて用いることもできる。これによって、更に一層低電力の光源の使用が可能となり、したがって更にバッテリ寿命を延ばすのに寄与することができる。
【0058】
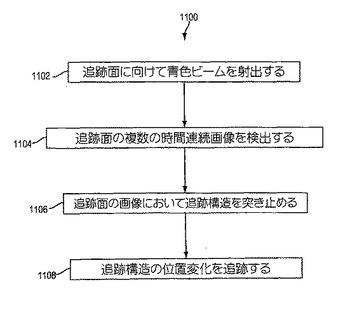
図11は、表面上全域における光学マウスの運動の追跡方法1100の一実施形態を図示するプロセス・フローを示す。方法1100は、1102において、青色光源から追跡表面に放出される入射光ビームを射出するステップと、1104において、正反射角度またはその付近で表面の画像を検出するように構成されている画像センサによって、追跡面の複数の時間連続画像を検出するステップとを含む。次に、方法1100は、1106において、追跡面の複数の時間連続画像において追跡構造を突き止めるステップと、次いで、1108において、これら複数の画像において追跡構造の位置変化を追跡するステップとを含む。次いで、光学マウスによって計算デバイスに(x,y)信号を供給することができる。この信号は、表示画面上においてカーソルまたはその他のインディケータの位置を突き止める際に、計算デバイスによって用いられる。
【0059】
方法1100に従うことにより、光学マウスの運動を、広範囲に及ぶ種々の表面上で追跡することが可能となる。これらの表面には、紙、セラミック、金属、繊維、カーペット、およびその他のこのような表面が含まれるが、これらに限定されるのではない。
【0060】
尚、本明細書において記載した構成および/または手法は、その性質上例示であること、そして多数の変形が可能であることから、これらの具体的な実施形態または例を限定的な意味で捕らえてはならないことは、言うまでもない。本開示の主題は、本明細書に開示した種々のプロセス、システムおよび構成、ならびにその他の機構、機能、行為、および/または特性の全ての新規かつ非自明な組み合わせや下位組み合わせ、ならびにそのあらゆるそして全ての均等物を含むものとする。
【背景技術】
【0001】
光学コンピューター・マウスは、光源および画像センサを用いて、下地にある追跡面に対するマウスの移動を検出することにより、ユーザーに計算機のディスプレイ上において仮想ポインタの位置を操作させる。今日大まかに2種類の光学マウス・アーキテクチャが用いられており、それらは傾斜LED(oblique-LED)アーキテクチャおよびレーザー・アーキテクチャである。これらのアーキテクチャの各々は、光源を用いて下地の追跡面上に向けて光を発射し、画像センサを用いて追跡面の画像を取り込む。移動を追跡するには、一連の表面の画像を取り込み、コントローラを通じてこれらの画像において識別される1つ又は複数の表面構造の位置(群)の変化を追跡する。
【0002】
傾斜LED光学マウスは、発光ダイオード(LED)からの非コヒーレント光を追跡面に向けて傾斜した視射角で発射し、追跡表面から散乱する光を、反射光に対して傾斜した角度に配置された画像検出器によって検出する。表面画像のコントラストは、表面の高さ変動によって生ずる陰影によって強調されるので、表面上にある追跡構造を区別することが可能になる。
【0003】
対照的に、レーザー光学マウスは、一般に赤外線または赤色波長領域のコヒーレント光ビームを追跡面上に発射することによって動作する。追跡面の画像は、正反射角または近正反射角(near-specular angle)で検出する。表面画像のコントラストは、低周波表面変動による鏡面反射の結果として得られる。また、反射するレーザー光における干渉パターンによっても、コントラストが生ずることもある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これらのアーキテクチャの各々は総合的にはある範囲の表面上では満足のいく性能を発揮するが、各々特定的な表面の種類や組織では満足できない挙動を呈する場合もある。例えば、傾斜LED光学マウスは、紙やマニラ紙の封筒のような荒い表面上では優れた動作を行う。何故なら、これらの表面から散乱する散乱光が豊富にあり、傾斜して位置付けられた検出器がこの散乱光を検出することができるからである。しかしながら、傾斜LED光学マウスは、ホワイト・ボード、光沢のあるセラミック・タイル、大理石、研磨/塗装した金属等のような、光沢面上では同様に動作できない場合もある。何故なら、斜入光の殆どは正反射角で反射してしまい、検出器に達する光は殆どないからである。
【0005】
同様に、レーザー光学マウスは、荒い表面、特に、事務所環境において共通して見られる白色コピー用紙のような繊維面上ではさほど良い動作を行わない。レーザーは異なる深さで紙の繊維と相互作用するので、その結果得られるナビゲーション画像は、干渉パターンを内包する場合があり、このために相関長が短い画像構造 (image feature)となり、相関付けができず、マウス追跡に誤動作が生ずる虞れがある。
【課題を解決するための手段】
【0006】
摘要
したがって、本明細書では、広い一続きの表面上で巧みに追跡するように構成された光学マウスの実施形態について記載する。開示する一実施形態では、光学マウスは、可視光スペクトルの青色領域内またはその付近に波長を有する光を追跡面に向けて放出するように構成されている光源と、追跡面によって反射された光の分布の内正反射部分からの光が画像センサに向けられるように、光源に対して位置付けされている画像センサと、画像センサからの画像データを受信し、画像データにおいて追跡構造(tracking feature)を特定するように構成されているコントローラとを含む。
【0007】
この摘要は、詳細な説明において以下で更に説明する概念から選択したものを、簡略化した形態で紹介するために設けられている。この摘要は、特許請求する主題の主要な特徴や必須の特徴を特定することを意図するのではなく、特許請求する主題の範囲を限定するために用いることも意図していない。更に、特許請求する主題は、本開示の任意の部分に記されている任意の欠点または全ての欠点を解決する実施態様に限定されるのでもない。
【図面の簡単な説明】
【0008】
【図1】図1は、光学マウスの一実施形態を示す。
【図2】図2は、図1の光学マウスの光学アーキテクチャの一実施形態を示す。
【図3】図3は、表面から反射した光の分布の反射成分および拡散成分の例を図示するグラフを示す。
【図4】図4は、透過性誘電体スラブに入射する光の反射および透過を示す。
【図5】図5は、追跡面の模式モデルを、誘電体スラブの集合体として示す。
【図6】図6は、金属面上に入射する光ビームの貫入深度を示す。
【図7】図7は、光沢剤がある場合とない場合における白色紙の反射率を比較したグラフを示す。
【図8】図8は、用紙における多数の繊維層から反射する光の入射ビームについて、簡略化した反射モデルを示す。
【図9】図9は、白色紙の表面を横切ってマウスを移動させた際における、レーザー・マウス画像検出器全域における画像の相関の模式図を示す。
【図10】図10は、白色紙の表面を横切ってマウスを移動させた際における、青色非コヒーレント光学マウス画像検出器を横切る画像の相関の模式図を示す。
【図11】図11は、追跡面を横切る光学マウスの運動を追跡する方法を図示するプロセス・フローを示す。
【発明を実施するための形態】
【0009】
図1は、光学マウス100を示し、図2は、光学マウス100の光学アーキテクチャ200の一実施形態を示す。光学アーキテクチャ200は、光ビーム204が位置210において追跡面上に入射するために、光ビーム204を追跡面206に向けて放出するように構成されている光源202を備えている。光ビーム204は、追跡面206の法線208に対して入射角θを有する。更に、光学アーキテクチャ200は、光源202と追跡面206との間に配置され、光ビーム204を平行化するコリメート・レンズ211も備えることができる。
【0010】
光源202は、可視スペクトルの青色領域内またはその付近の光を放出するように構成されている。「可視スペクトルの青色領域内またはその付近」、ならびに「青色」、「青色光」等の用語は、本明細書において用いる場合、可視光スペクトルの青色領域内またはその付近、例えば、400から490nmの範囲において1つ又は複数の放出線または放出帯を備えている光を記述するものとする。また、これらの用語は、光沢剤を活性化することができる近UVまたは近緑色領域内における光を記述することもできる。これについては、以下で更に詳しく説明する。
【0011】
種々の実施形態において、光源202は、非コヒーレント光またはコヒーレント光を出力するように構成することができ、更に1つ又は複数のレーザー、LED、OLED(有機発光デバイス)、狭帯域幅LED、またはその他の適した発光デバイスであればいずれでも利用することができる。更に、光源202は、外見が青色である光を放出するように構成することもでき、または観察者には青色以外の外観を有する光を放出するように構成することもできる。例えば、白色LED光源は、青色LEDダイ(例えば、InGaNで形成する)を、他の色のLEDとの組み合わせ、あるいはセリウムをドープしたイットリウム・アルミニウム・ガーネットのようなシンチレータまたは発光体との組み合わせ、あるいは他の波長の光を放出するその他の構造との組み合わせのいずれかと共に利用すれば、ユーザーには白色に見える光を生成することができる。更に別の実施形態では、光源202は、青色光を通過させる帯域通過フィルタと組み合わせた汎用広帯域光源を備えている。このようなLEDは、これらの構造から放出される光の中に青色波長があることから、本明細書において用いられる「青色光」の意味に該当する。
【0012】
引き続き図1において、入射光ビーム204のある部分は、212で示すように、追跡面206から反射し、入射角θに等しい正反射角(specular reflection angle)γを中心として分布する。反射光212の一部は、レンズ214によって画像センサ216上に撮像される。図1に示すように、画像センサ216は、正反射角またはほぼ正反射角で位置付けられており、反射光212の分布の正反射部分における光の少なくとも一部を検出するようになっている。以下で説明するように、正反射角において反射光を検出するように位置付けられた画像検出器と組み合わせて青色光源を用いることにより、他の光学アーキテクチャに勝る種々の利点を提供することができる。
【0013】
画像センサ216は、画像データをコントローラ218に供給するように構成されている。コントローラ218は、画像センサ216から複数の画像データの時間連続フレームを取り込み、この画像データを処理して、追跡面の複数の時間連続画像において1つ又は複数の追跡構造を突き止め、追跡面の複数の時間連続画像の位置(群)の変化を追跡して、光学マウス100の運動を追跡するように構成されている。表面構造(surface feature)の突き止めおよび追跡は、適した様式であればそのいずれでも実行することができ、本明細書ではこれ以上詳しく説明しない。
【0014】
反射光分布の正反射部分(specular portion)における光を検出するように構成した場合、画像センサ216は、表面からの正反射の断片(patches)を検出することができ、これらは表面の画像上における明るい断片のように見える。対照的に、傾斜して配置した検出器は、追跡面の画像において、反射の断片ではなく、陰影を検出するために用いられるのが一般的である。したがって、画像センサ216を正反射構成にしたときの方が、このセンサを傾斜構成にしたときよりも多くの光がセンサに到達するので、正反射光において画像を検出することにより、マウス100の高速移動の間に、積分時間(integration time)を短縮し、追跡の精度を高めることが可能になる。また、積分時間の短縮によって、光源を「オン」で駆動する時間も短縮することができ、これによって、光源が引き込む電流を、時間の関数として削減し、バッテリの寿命を延ばすことができる。更に、正反射またはほぼ正反射の画像センサ構成を用いることにより、低い電力の光源を用いることも可能となり、更にバッテリの寿命を延ばすのに寄与することができる。
【0015】
画像センサ216に到達する光の量を増大させると、積分時間の短縮および消費電力低減の他にも、別の利点を提供することができる。例えば、光学系の被写体深度は、当該系の絞りに反比例する。単位時間当たりに検出器に到達する光量が多い程、光学系の絞りを小さくすることができ、これによって光学系の被写体深度を高め、画像における光学収差を低減することにより撮像性能を向上させることができる。したがって、画像センサ216に対する追跡面206の高さは、被写体深度が大きい程、性能の損失なく、大きな幅で変動させることが可能になる。これによって、傾斜アーキテクチャ系の製造における許容度と比較して、画像センサ216および付随するレンズ214の相対的高さ/位置決めに関する製造許容度を緩和することが可能となり、したがって製造コスト低減に繋げることができる。
【0016】
光204の入射ビームが追跡面206となす角度は、適した角度であればいずれにでも設定することができる。実施形態によっては、光204の入射ビームは、追跡面の法線に対して比較的鋭い角度を有するように構成するとよい場合もある。これによって、マウスにおける光源202および/または画像センサの相対的な水平および垂直位置決めに関する製造許容度を緩和することが可能となる。何故なら、これらの部品の位置決めにおける誤差は、採用する入射光の角度を浅くする(平行に近付ける)場合と比較して、追跡面上で光ビームの中心とする位置210におけるオフセット(offset)の度合いにはさほど影響がないと思われるからである。適した角度の例には、追跡面の法線に対して0から40度の範囲の角度が含まれるが、これに限定されるのではない。
【0017】
図3は、追跡面から反射する光の分布300のプロットの一例を示す。分布300は、正反射分布成分302と、拡散分布成分304とを含み、これらが組み合わされて分布300が生ずる。拡散成分は、追跡面に入り多数回の反射および開設を受けた光線の散乱によって発生する。正反射成分は、対照的に、入射光線の1回の反射によって発生する。表面は、複数の平面反射要素から成り、各要素がそれ自体の方位を有すると考えることができる。その結果、生ずる反射は正反射方向を中心として分布し、分布の正反射成分の幅が表面粗さの関数となる。正反射成分302および拡散分布成分の相対的な寄与は、追跡面の特質に応じて様々な変化を呈する可能性があるが、一般に、分布300は、正反射角度γまたはその付近において最大光強度を有し、正反射角度γから離れるに連れて強度が低くなる。表面の欠点または吸収がない完全な鏡面の場合、入射光の100%が正反射角度で反射する。図3に示すように、紙、金属、および木材のような極普通の非鏡面からの反射光は、正反射角度またはその付近において、分布の他の地点よりも高い強度を有する。本明細書において用いる場合、「反射光の分布の正反射部分」という用語は、鏡面状正反射の方向(「正反射軸」)から±20度以内にある、散乱光の分布の部分を指すこととする。
【0018】
画像センサ216は、正反射角に対して適したいずれかの角度で光を検出するように構成されている。一般に、光の強度は正反射角において最高となることができる。しかしながら、画像センサの感度のような、他の要因によっては、正反射角からは外れてはいるものの、なおも反射光の正反射部分以内に検出器を配置することが奨励される場合もある。金属反射面からカーペットおよび繊維の表面までに及ぶ広範囲の表面上における運動を検出するように構成されている画像センサでは、適した検出器の角度は、正反射角から±20度の角度が含まれるがこれに限定されるのではない。
【0019】
前述のように、可視スペクトルの青色領域内またはその付近において光を放出する光源を用いると、LEDおよびレーザー・マウスにおいて普通に用いられている赤色および赤外線光源に勝る利点を提供することができる。これらの利点は、青色光源ではなく赤色または赤外線光を選択するに至ったと考えられる他の要因のためにこれまで認められておらず、したがって、青色光源の使用によって提供される便益は期待されていないこともある。例えば、現在入手可能な青色光源は、現在入手可能な赤色および赤外線光源よりも電力消費量が多く、コストが高く、これによって、光学マウスにおける光源として青色光源の選択から遠ざかっていた可能性がある。
【0020】
本明細書において定める青色光によって提供される利点は、少なくとも部分的に、赤色および赤外線光と比較して、青色光の反射面との物理的相互作用の特質から得られる。例えば、青色光は、赤色および赤外線光よりも、誘電体表面の反射強度が高い。図4を参照すると、この図は、可視光に対して透過性であり、厚さがd、屈折率がnの材料で作られた誘電体スラブ404からの入射光ビーム402の反射を示す。図示のように、入射光ビーム402の一部は、スラブの表面406で反射し、光の一部はスラブ404の内部を貫通して透過する。透過した光は、スラブの背面408に至り、光の一部は背面408を貫通して透過し、一部は反射して前面406に向かって戻ってくる。前面に入射した光は、再度部分的に反射し、部分的に透過する等となる。
【0021】
入射光402のビームにおける光は、真空波長λを有する。反射係数または振幅をrで示し、透過係数または振幅をtで表すと、スラブ404の表面406において、次のようになる。
【0022】
【数1】
【0023】
【数2】
【0024】
スラブの背面408では、r’で示す、対応する反射係数、およびt’で示す透過係数は、次のようになる。
【0025】
【数3】
【0026】
【数4】
【0027】
尚、反射係数および透過係数または振幅は、スラブ404の屈折率のみに依存することを注記しておく。入射光ビームが表面の表線に対してある角度で表面に当たると、振幅の方程式は、フレネルの方程式に応じて、角度の関数となる。
【0028】
スラブ404の屈折率が、スラブ404を取り巻く空気の屈折率とは異なることによって誘発する位相ずれφは、以下のように示される。
【0029】
【数5】
【0030】
透過位相ずれを考慮に入れて、全ての部分的反射および透過の振幅を総計すると、スラブの総反射および透過係数または振幅について、以下の式が得られる。
【0031】
【数6】
【0032】
【数7】
【0033】
【数8】
【0034】
【数9】
【0035】
小さなスラブの厚さdに限定すると、反射振幅の式は、一層簡単な形式に縮小する。
【0036】
【数10】
【0037】
この限定の下では、反射光場が入射光場よりも90度位相進みとなり、その振幅は1/λおよび誘電体の分極率 (n2−1)の双方に比例する。散乱する振幅の1/λ依存性は、反射光の強度が振幅の二乗に比例するので、薄い誘電体スラブからの反射光は1/λ2に比例することを表す。つまり、反射光の強度は、短い波長の光の方が長い波長の光よりも高い。
【0038】
光学マウスの観点からは、図5を参照すると、そして図3を参照して先に説明したように、追跡面は、誘電体スラブ500の形態で多数の反射要素を備えており、その各々が表面の局所的高さおよび傾きに応じて方位付けられているものとしてモデル化することができる。これらの誘電体スラブの各々は入射光を反射し、反射光は撮像レンズの開口数内に入るときには、検出器上に明るい構造が得られ、それ以外のときには光がレンズによって取り込まれず、検出器には暗い構造が得られる。470nmの青色における動作では、明るい構造において反射光の強度が、850nmの波長を有する赤外線光よりも8502/4702≒3.3倍強くなり、630nmの波長を有する赤色光よりも6302/4702≒1.8倍強くなる。このため、検出器における青色光の画像のコントラストが向上する。何故なら、検出器上の明るい構造は、対応する赤色画像または赤外線画像においてそれらが見える場合よりも明るくなるからである。これらのコントラストが高くなった画像によって、光源の強度が低くても、追跡構造の容認可能な識別、および追跡のロバスト性向上が可能となり、したがって、電力消費を低減しバッテリ寿命を延ばしつつも、赤外線マウスまたは赤色光マウスに対して、追跡性能を向上させることができる。
【0039】
図6は、光学マウスにおける青色光の使用による、赤色または赤外線光に勝る、青色光の貫入深度が赤色または赤外線光のそれよりも少ないという別の利点を示す。一般に、表面に入射する放射線の電界は、表面を貫通してある程度まで達する。図6は、金属スラブ内部における電界の振幅を、深度の関数として簡単に示す図である。図示のように、入射光ビームの電界は、金属スラブ内部では、指数的に減衰し、特性e−フォールディング距離(characteristic e-fold distance)が波長に比例する。この波長依存性を想定すると、赤外線光は、青色光よりも1.8倍金属材料内に進入する可能性がある。また、青色光が非金属の誘電体表面に入射するときにも、短い貫入深度が発生するが、正確な貫入深度は、材料の特性に依存する。
【0040】
赤色および赤外線光と比較して青色光の貫入深度が少ないことは、光ナビゲーション用途の観点から、様々な理由により利点となる可能性がある。第1に、追跡構造を追従するためにコントローラが用いる画像相関方法は、下地のナビゲーション面と1対1に対応する画像を必要とする場合がある。表面内部において異なる深度から反射する光があると、相関計算を混乱させる虞れがある。更に、材料内に漏入する光のために、画像検出器に到達する反射光が減少する。
【0041】
加えて、青色光の貫入深度の方が少ないことが望ましいのは、検出器における隣接画素間およびほぼ近隣する画素間におけるクロストークの低減、および変調伝達関数(MTF)の向上につながり得るからである。これらの効果を理解するために、波長が長い赤外線光子と波長が短い青色光子とがシリコンCMOS検出器に入射した場合における相違について検討する。半導体における光子の吸収は、波長に依存する。波長が短い光では吸収は多いが、長い波長では、バンド・ギャップ・エネルギに近づくので、吸収は減少する。吸収が少ない程、波長が長い光子は波長が短い青色光子よりも半導体内部で遠くまで進行し、対応して材料内部で発生する電荷は、波長が短い青色光子によって対応して生成される電荷よりも遠くまで進行して、収集されるはずである。進行距離が長い程、長波長光からの電荷キャリアは、青色光子よりも多く材料内で拡散し広がる可能性がある。このため、1つの画素内部で発生する電荷が、近隣画素において偽信号を生成する虞れがあり、電光システムにおいてクロストーク発生、およびMTF転化 (reduction)が生ずる結果となる。
【0042】
青色光の使用による、他の光源に勝る更に別の利点として、青色光は、赤外線または赤色光よりも小さい追跡構造を解明することができる。一般に、光学撮像システムが解明することができる最も小さい構造は、回折によって制限される。レイリーの基準では、表面構造のサイズdは、同じサイズの隣接する物体から区別することができる場合、d≧λ/NAという関係で与えられると述べられている。ここで、λは入射光の波長であり、NAは撮像システムの開口数である。dおよびλ間の比例関係から示されるのは、青色光は、それよりも長い波長の光よりも、小さな表面構造が解明可能であるということである。例えば、λ=470nmで動作しf/l光学素子を有する青色マウスは、約2λ≒940nmのサイズまでの構造を撮像することができる。850nmで動作する赤外線VCSEL(縦型空洞表面放出レーザー)では、撮像可能な最小構造サイズは、1.7μmまで増大する。したがって、青色光の使用により、しかるべき画像センサおよび光学素子によって、一層小さい追跡構造を撮像することが可能となる。
【0043】
また、青色光は、種々の具体的な表面上において、他の波長の光よりも高い反射率を有することもある。例えば、図7は、可視スペクトル全域で光沢剤がある場合およびない場合における、白色紙の反射率のグラフを示す。「光沢剤」とは、紙を白くそして「きれいに」見せるために、多くの種類の紙に添加される蛍光染料である。図7は、光沢剤を有する白色紙が、可視光スペクトルの青色領域内またはその付近において、当該スペクトルの他の様々な領域よりも比較的多く反射することを示す。したがって、可視光スペクトルの青色領域内またはその付近における光をマウスの光源として用いると、光沢剤を含む表面上や、その他のこのような蛍光性または反射強化追跡面上において用いるときに、相乗効果を得ることができ、これによってこのような表面におけるマウスの性能を、他の表面におけるよりも非常に改善することができる。
【0044】
このような効果は、種々の使用想定場面において利点を提供することができる。例えば、携帯用マウスに共通の使用環境に会議室がある。多くの会議室のテーブルは、ガラスで作られており、ガラスは一般に光学マウスの挙動にとっては劣った表面となる。ガラスのような透過性表面上におけるマウスの性能を向上させるために、ユーザーは間に合わせのマウス・パッドとして用いるために、透過性表面上に1枚の紙を置けばよい。したがって、紙が光沢剤を含む場合、他の表面を用いる場合と比較して、マウス性能における相乗効果を実現することができ、電力消費低減、したがってバッテリで動作するマウスであればバッテリの長寿命化を図ることができる。
【0045】
性能における同様の相乗効果も、可視スペクトルの青色部分内またはその付近の光に晒したときに、反射率、蛍光または燐光放出というような、光沢強化特性を有するように他の表面を処理するまたは準備することによって得ることができる。例えば、マウス・パッドまたはその他のマウス追跡専用面が、青色領域において高い反射率を有する材料、および/または青色領域において入射光および蛍光または燐光を吸収する材料のような、光沢強化剤を含むとよい。青色光マウスと共に用いると、このような材料は、このような反射または蛍光面がない表面よりも、コントラストを高めることができ、これによって高い追跡性能、低電力消費等を得ることができる。
【0046】
紙のような追跡表面の中には、コヒーレント光源ではなく、非コヒーレント光源を使用する方が、利点が得られる場合もある。例えば、図8は、光学マウスからの光が通常のコピー用紙から反射した場合の簡略化したモデルを示す。紙の微視的構造は、繊維の積層構造となっており、繊維の一部の間に空隙がある。長い波長のレーザー光は、紙の表面に入り多数の層を貫通した後に反射する。これは、図8において、紙の中にある3つの異なる繊維層からの光の反射として示されている。
【0047】
この環境では、850nmで動作し、線幅が約Δλ<0.1nmのレーザーは、
【数11】
のコヒーレント長を有する。この簡略化したモデルでは、3本の入射光線束の各々が検出器において干渉して、干渉パターンを作る。この単純なモデルを、大きな紙面上に広がるより多くの光線に拡大すると、複雑な干渉パターンが得られる。前述の複雑なレーザー干渉パターンは、異なる深さにある繊維からの反射によって生じ、図9に示すような、非常に短い相関長の画像シーケンスを作成することができる。画像の内容は、一般に高周波であり、検出器のナイキスト限界よりも上の追跡構造の大きな断片(fraction)を有する可能性がある。ナビゲーション・アルゴリズムの中には、マウスの運動を判断する際に、画像シーケンスについて相関計算を実行するものもある。短い相関長を有するために、画像に含まれる特徴が素早く「消失」し、多数の隣接する画像にわたって存続しない場合、相関計算は、もはやマウスの運動について信頼性のある推定値を求めることは事実上不可能となる。加えて、相関長が長い画像ストリームは、現在マウスにおいて用いられているアルゴリズムよりも、潜在的に一層単純なアルゴリズムでも受け入れるので有利である。単純なアルゴリズムおよび計算の削減により、電力の節約およびバッテリの長寿命化を可能とすることができる。これによって、例えば、異なるソフトウェア・フィルタ係数間で切り換えるというような回避すべき、複雑なアルゴリズムの採用を受け入れることもできる。
【0048】
白色紙上で動作するレーザー・マウスの場合、相関長が、検出器の1つの画素の長さ(30〜50μm)以下となることがあり、結果的に追跡性能が損なわれる。例えば、再度図9を参照すると、この図は、白色紙上で追跡しているレーザー・マウスの検出器における画像の4×4画素の小領域の一例を示す。マウスを移動させると、高周波画像構造の相関が急速に失われる。表面を3画素移動させた時点では、本来10個ある追跡構造の内3つしか現れない。
【0049】
レーザー光源とは対照的に、青色LEDは、波長が470nm、線幅Δλが約30nmの光を放出し、そのコヒーレント長は遥かに短く、約7μmである。このレーザー光源よりもコヒーレント長が短いということは、異なる深さで紙の繊維から反射した光線が、検出器において干渉パターンを形成しないことを意味する。したがって、図10に示すような、青色非コヒーレント光源を用いることにより、数十画素という画像相関長も可能となる場合がある。加えて、これらの構造の空間周波数は、無理なく検出器のナイキスト限界未満に納まり易くなる。この種の長い相関長を有する画像シーケンスを分析し、基礎となる表面の運動のロバストな推定値を抽出するために、相関アルゴリズムを正しく適応させることができる。
【0050】
尚、青色コヒーレント光の使用により、スペックル・サイズに関して、赤色または赤外線光を用いた場合よりも勝る同様の利点が得られることは認められよう。スペックル・サイズは波長に比例するので、青色コヒーレント光は、赤色または赤外線いずれのレーザー光源よりも小さいスペックルを発生する。レーザー・マウスの実施形態の中には、可能な限り最も小さいスペックルを有することが望ましい場合がある。何故なら、スペックルは有害なノイズ源であり、追跡性能を低下させるからである。青色レーザーは、比較的小さなスペックル・サイズを有し、したがって、所与の画素において、赤色または赤外線レーザーよりも多くの青色スペックルがその面積を専有する。このため、画像におけるスペックル・ノイズを平均化によって解消し易くなり、追跡が改善する結果となる。
【0051】
青色光のコヒーレント長の方が短いことにより、他の利点も同様に得ることができる。例えば、青色光を利用する光学マウスは、塵、システム光学素子における成型欠陥、そしてその他のこのような固定干渉パターンの原因に対して、レーザー・マウスよりも感度が低いと考えられる。例えば、レーザー・マウスの平行化レンズ上に10μmの塵粒子が付着している場合、コヒーレントなレーザー光はこの塵粒子の周囲で回折し、検出器には高コントラストの環状リング(circular rings)が現れる。これらのリング(およびその他のこのような干渉パターン)があると、レーザー・マウスの追跡に問題が生ずる虞れがある。これは、検出器に提示される高いコントラストの固定パターンが、相関関数において余分なピークを生じさせ、これが移動しないからである。同様の理由で、レーザー・マウスの製造では、射出成型されるプラスチック光学素子の品質に対して、厳しいプロセス制御が要求される。何故なら、プラスチックにおける欠陥が、画像ストリームにおいて有害な固定パターンを発生させる虞れがあるからである。
【0052】
青色光の使用により、このような固定パターンに伴う問題を低減または回避するのに役立つこともある。コヒーレント光が塵粒子のような小さい粒子(この場合における「小さい」とは、大まかに光の波長のサイズの波長を示す)に衝突すると、光はその粒子の周囲で回折し、リング形状の干渉パターンを生ずる。中心にあるリングの直径は、以下の関係で与えられる。
【0053】
直径=2.44(λ)(f/#)
【0054】
したがって、この関係によれば、青色光の方が赤色または赤外線光よりも小さいリングを生じ、画像センサは小さい方の固定パターン・ノイズ源を感知する。一般に、検出器が感知する固定パターンが大きい程、そして一時的に変化していない検出器の画素が多い程、動いていない画像構造によって相関計算が支配されていく可能性があるので、ナビゲーションは悪化する。更に、非コヒーレント光では、回折の効果が目立つ距離は一層短くなる。
【0055】
青色正反射撮像アーキテクチャ(blue specular imaging architecture)の更に別の利点は、小さな形状係数での光機械パッケージング、小さなz−高の低コスト・モジュールを可能にすることである。光学追跡長が短いナビゲーション・デバイスは、空間が貴重となる、複雑な工業設計による移動体電話機またはデザイナー・マウス(designer mice)のような用途では望ましい。従来の赤色LEDマウスは、傾斜照明および陰影撮像の要件のために、パッケージの体積が比較的大きくなっている。従来のレーザー・マウスでは、典型的なVCSELレーザー源の発散角が比較的小さいために、追跡距離が短い光学系では、製造許容度を受け入れられるような十分に大きなサイズで、平行化したレーザー・ビームを得ることが困難となる。スペックル物理学(speckle physics)に基づくレーザー・マウスも、小さなz−高さでは問題となる。何故なら、スペックル・サイズ(〜光学f/#)は検出器における照度
【数12】
とのトレードオフとなるからである。
【0056】
以上に述べた物理的特性に鑑みて、青色光の使用は、光学マウスにおいて、赤色光または赤外線光の使用に勝る種々の利点を得ることができる。例えば、赤色または赤外線光と比較して青色光の反射率が高く貫入深度が浅いことにより、強度が低い光源の使用が可能となり、これによって潜在的にバッテリ寿命を延ばすことができる。これは、光沢剤を添加した白色紙上でマウスを動作させるときに特に有利となり得る。何故なら、光沢剤の蛍光の強度は、可視スペクトルの青色領域では強くなることがあるからである。更に、光学的に同等の(即ち、レンズ、f−ナンバー、画像センサ等)光源からの赤色光と比較して青色光のコヒーレント長が短く回折限度が小さいことにより、赤色光よりも長い画像構造の相関長および精細な表面構造を解明することが可能となり、したがって、一層多種多様な表面上において正反射非コヒーレント青色光マウスを使用することが可能になる。正反射青色LED光学マウスのための追跡面として用いることができる表面の例には、紙の表面、繊維の表面、セラミック、大理石、木材、金属、花崗岩、タイル、ステンレス鋼、ならびに、ベルベル(Berber)およびディープ・シャグ(deep shag)を含むカーペットが含まれるが、これらに限定されるのではない。
【0057】
更に、実施形態によっては、CMOSセンサのような画像センサを、可視スペクトルの青色領域において高い感度(即ち、量子効率)を有するように特定的に構成し、これを青色光源と組み合わせて用いることもできる。これによって、更に一層低電力の光源の使用が可能となり、したがって更にバッテリ寿命を延ばすのに寄与することができる。
【0058】
図11は、表面上全域における光学マウスの運動の追跡方法1100の一実施形態を図示するプロセス・フローを示す。方法1100は、1102において、青色光源から追跡表面に放出される入射光ビームを射出するステップと、1104において、正反射角度またはその付近で表面の画像を検出するように構成されている画像センサによって、追跡面の複数の時間連続画像を検出するステップとを含む。次に、方法1100は、1106において、追跡面の複数の時間連続画像において追跡構造を突き止めるステップと、次いで、1108において、これら複数の画像において追跡構造の位置変化を追跡するステップとを含む。次いで、光学マウスによって計算デバイスに(x,y)信号を供給することができる。この信号は、表示画面上においてカーソルまたはその他のインディケータの位置を突き止める際に、計算デバイスによって用いられる。
【0059】
方法1100に従うことにより、光学マウスの運動を、広範囲に及ぶ種々の表面上で追跡することが可能となる。これらの表面には、紙、セラミック、金属、繊維、カーペット、およびその他のこのような表面が含まれるが、これらに限定されるのではない。
【0060】
尚、本明細書において記載した構成および/または手法は、その性質上例示であること、そして多数の変形が可能であることから、これらの具体的な実施形態または例を限定的な意味で捕らえてはならないことは、言うまでもない。本開示の主題は、本明細書に開示した種々のプロセス、システムおよび構成、ならびにその他の機構、機能、行為、および/または特性の全ての新規かつ非自明な組み合わせや下位組み合わせ、ならびにそのあらゆるそして全ての均等物を含むものとする。
【特許請求の範囲】
【請求項1】
光学マウスであって、
可視光スペクトルの青色領域内またはその付近に波長を有する光を、追跡面に向けて放出するように構成されている光源と、
画像センサであって、前記光源から発し前記追跡面によって反射した光の分布の正反射部分からの光が、当該画像センサによって検出されるように、前記光源に対して相対的に位置付けられた、画像センサと、
前記画像センサからの画像データを受信し、前記画像データにおいて追跡構造を特定するように構成されているコントローラと、
を備えている、光学マウス。
【請求項2】
請求項1記載の光学マウスにおいて、前記光源は、400nmから490nmまでの範囲内の波長を備えている光を放出するように構成されている、光学マウス。
【請求項3】
請求項1記載の光学マウスにおいて、前記光源は、前記追跡面における光沢剤によって、蛍光または燐光が放出される波長の光を放出するように構成されている、光学マウス。
【請求項4】
請求項3記載の光学マウスにおいて、前記光源は、前記追跡面の法線に対して0度と40度との間の角度を有する光ビームを形成するように構成されている、光学マウス。
【請求項5】
請求項1記載の光学マウスにおいて、前記画像センサは、正反射軸に対して0度から±20度の範囲にある光を検出するように位置付けられている、光学マウス。
【請求項6】
請求項1記載の光学マウスにおいて、当該光学マウスは携帯用マウスである、光学マウス。
【請求項7】
請求項1記載の光学マウスにおいて、前記光源は、青色および/または白色光を放出するように構成されている発光ダイオードを備えている、光学マウス。
【請求項8】
請求項1記載の光学マウスにおいて、前記光源はレーザーを備えている、光学マウス。
【請求項9】
請求項1記載の光学マウスにおいて、前記検出器は、青色光に対して高い感度を有するように構成されているCMOS画像センサである、光学マウス。
【請求項10】
光学マウスであって、
追跡面に対して0度から40度の範囲の入射角度で前記追跡面に向けて400から490nmの範囲の光を放出するように構成されている光源と、
正反射軸に対して0度から20度の角度以内の反射光を検出するように位置付けられている画像センサと、
前記追跡表面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項11】
請求項10記載の光学マウスにおいて、当該光学マウスは携帯用光学マウスである、光学マウス。
【請求項12】
請求項10記載の光学マウスにおいて、前記光源はコヒーレント光を放出するように構成されている、光学マウス。
【請求項13】
請求項10記載の光学マウスにおいて、前記光源は、青色光または白色光を放出するように構成されているLEDまたはOLEDを備えている、光学マウス。
【請求項14】
光学マウスであって、
可視スペクトルの青色領域内またはその付近のコヒーレント光を、追跡面に向けて放出するように構成されている光源と、
反射光の分布の内正反射部分内において反射光を検出するように位置付けられている画像センサと、
前記追跡面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項15】
請求項14記載の光学マウスにおいて、当該マウスは携帯用バッテリ給電型マウスである、光学マウス。
【請求項16】
請求項14記載の光学マウスにおいて、前記光源は、400nmから490nmの範囲にある波長を備えている光を放出するように構成されている、光学マウス。
【請求項17】
光学マウスであって、
可視スペクトルの青色領域内またはその付近の波長を備えている非コヒーレント光を、追跡面に向けて放出するように構成されている光源と、
反射光の分布の内正反射部分内において反射光を検出するように位置付けられている画像センサと、
前記追跡面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項18】
請求項17記載の光学マウスにおいて、前記光源は青色光を放出するように構成されている、光学マウス。
【請求項19】
請求項17記載の光学マウスにおいて、前記光源は白色光を放出するように構成されている、光学マウス。
【請求項20】
請求項17記載の光学マウスにおいて、前記光源はLEDである、光学マウス。
【請求項21】
請求項17記載の光学マウスにおいて、前記光源はOLEDである、光学マウス。
【請求項22】
光学マウスの運動追跡方法であって、
可視光スペクトルの青色領域内またはその付近に波長を有する入射光ビームを、光沢剤を含む追跡面に向けて射出するステップと、
前記入射光ビームに応答して前記光沢剤によって放出された光を検出することにより、画像センサによって前記追跡面の複数の時間連続画像を検出するステップと、
前記追跡面の前記複数の時間連続画像において追跡構造を突き止めるステップと、
前記追跡面の前記複数の時間連続画像に跨る前記追跡画像の位置変化を追跡するステップと、
を備えている、方法。
【請求項23】
請求項22記載の方法において、入射光ビームを追跡面に向けて射出するステップは、光沢剤を含む1枚の紙に向けて、前記入射光ビームを射出することを含む、方法。
【請求項24】
請求項22記載の方法において、前記追跡面に入射光ビームを射出するステップは、波長が400から490nmの範囲の入射光ビームを射出することを含む、方法。
【請求項25】
請求項22記載の方法において、前記追跡面の複数の時間連続画像を検出するステップは、正反射軸に対して0度から±20度の範囲にある角度において、前記表面から反射する光を検出することを含み、前記入射光ビームを前記追跡面に射出するステップは、追跡面の法線に対して0から40度の範囲にある角度で、前記追跡面に向けて前記入射光ビームを射出することを含む、方法。
【請求項1】
光学マウスであって、
可視光スペクトルの青色領域内またはその付近に波長を有する光を、追跡面に向けて放出するように構成されている光源と、
画像センサであって、前記光源から発し前記追跡面によって反射した光の分布の正反射部分からの光が、当該画像センサによって検出されるように、前記光源に対して相対的に位置付けられた、画像センサと、
前記画像センサからの画像データを受信し、前記画像データにおいて追跡構造を特定するように構成されているコントローラと、
を備えている、光学マウス。
【請求項2】
請求項1記載の光学マウスにおいて、前記光源は、400nmから490nmまでの範囲内の波長を備えている光を放出するように構成されている、光学マウス。
【請求項3】
請求項1記載の光学マウスにおいて、前記光源は、前記追跡面における光沢剤によって、蛍光または燐光が放出される波長の光を放出するように構成されている、光学マウス。
【請求項4】
請求項3記載の光学マウスにおいて、前記光源は、前記追跡面の法線に対して0度と40度との間の角度を有する光ビームを形成するように構成されている、光学マウス。
【請求項5】
請求項1記載の光学マウスにおいて、前記画像センサは、正反射軸に対して0度から±20度の範囲にある光を検出するように位置付けられている、光学マウス。
【請求項6】
請求項1記載の光学マウスにおいて、当該光学マウスは携帯用マウスである、光学マウス。
【請求項7】
請求項1記載の光学マウスにおいて、前記光源は、青色および/または白色光を放出するように構成されている発光ダイオードを備えている、光学マウス。
【請求項8】
請求項1記載の光学マウスにおいて、前記光源はレーザーを備えている、光学マウス。
【請求項9】
請求項1記載の光学マウスにおいて、前記検出器は、青色光に対して高い感度を有するように構成されているCMOS画像センサである、光学マウス。
【請求項10】
光学マウスであって、
追跡面に対して0度から40度の範囲の入射角度で前記追跡面に向けて400から490nmの範囲の光を放出するように構成されている光源と、
正反射軸に対して0度から20度の角度以内の反射光を検出するように位置付けられている画像センサと、
前記追跡表面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項11】
請求項10記載の光学マウスにおいて、当該光学マウスは携帯用光学マウスである、光学マウス。
【請求項12】
請求項10記載の光学マウスにおいて、前記光源はコヒーレント光を放出するように構成されている、光学マウス。
【請求項13】
請求項10記載の光学マウスにおいて、前記光源は、青色光または白色光を放出するように構成されているLEDまたはOLEDを備えている、光学マウス。
【請求項14】
光学マウスであって、
可視スペクトルの青色領域内またはその付近のコヒーレント光を、追跡面に向けて放出するように構成されている光源と、
反射光の分布の内正反射部分内において反射光を検出するように位置付けられている画像センサと、
前記追跡面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項15】
請求項14記載の光学マウスにおいて、当該マウスは携帯用バッテリ給電型マウスである、光学マウス。
【請求項16】
請求項14記載の光学マウスにおいて、前記光源は、400nmから490nmの範囲にある波長を備えている光を放出するように構成されている、光学マウス。
【請求項17】
光学マウスであって、
可視スペクトルの青色領域内またはその付近の波長を備えている非コヒーレント光を、追跡面に向けて放出するように構成されている光源と、
反射光の分布の内正反射部分内において反射光を検出するように位置付けられている画像センサと、
前記追跡面の複数の時間連続画像において追跡構造を突き止め、前記追跡面の前記複数の時間連続画像に跨る前記追跡構造の位置変化を追跡するように構成されているコントローラと、
を備えている、光学マウス。
【請求項18】
請求項17記載の光学マウスにおいて、前記光源は青色光を放出するように構成されている、光学マウス。
【請求項19】
請求項17記載の光学マウスにおいて、前記光源は白色光を放出するように構成されている、光学マウス。
【請求項20】
請求項17記載の光学マウスにおいて、前記光源はLEDである、光学マウス。
【請求項21】
請求項17記載の光学マウスにおいて、前記光源はOLEDである、光学マウス。
【請求項22】
光学マウスの運動追跡方法であって、
可視光スペクトルの青色領域内またはその付近に波長を有する入射光ビームを、光沢剤を含む追跡面に向けて射出するステップと、
前記入射光ビームに応答して前記光沢剤によって放出された光を検出することにより、画像センサによって前記追跡面の複数の時間連続画像を検出するステップと、
前記追跡面の前記複数の時間連続画像において追跡構造を突き止めるステップと、
前記追跡面の前記複数の時間連続画像に跨る前記追跡画像の位置変化を追跡するステップと、
を備えている、方法。
【請求項23】
請求項22記載の方法において、入射光ビームを追跡面に向けて射出するステップは、光沢剤を含む1枚の紙に向けて、前記入射光ビームを射出することを含む、方法。
【請求項24】
請求項22記載の方法において、前記追跡面に入射光ビームを射出するステップは、波長が400から490nmの範囲の入射光ビームを射出することを含む、方法。
【請求項25】
請求項22記載の方法において、前記追跡面の複数の時間連続画像を検出するステップは、正反射軸に対して0度から±20度の範囲にある角度において、前記表面から反射する光を検出することを含み、前記入射光ビームを前記追跡面に射出するステップは、追跡面の法線に対して0から40度の範囲にある角度で、前記追跡面に向けて前記入射光ビームを射出することを含む、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公表番号】特表2011−501318(P2011−501318A)
【公表日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2010−531124(P2010−531124)
【出願日】平成20年10月12日(2008.10.12)
【国際出願番号】PCT/US2008/079670
【国際公開番号】WO2009/055264
【国際公開日】平成21年4月30日(2009.4.30)
【出願人】(506076606)アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド (129)
【Fターム(参考)】
【公表日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成20年10月12日(2008.10.12)
【国際出願番号】PCT/US2008/079670
【国際公開番号】WO2009/055264
【国際公開日】平成21年4月30日(2009.4.30)
【出願人】(506076606)アバゴ・テクノロジーズ・ジェネラル・アイピー(シンガポール)プライベート・リミテッド (129)
【Fターム(参考)】
[ Back to top ]