
光学式センサ装置
【課題】 光学式センサ装置において一定の検知範囲からの反射光のレベル変動を防止すること。
【解決手段】 受光素子14の前面に検知範囲のうち近い位置にあるときにはその一部を遮光し、遠ざかるにつれて遮光量を減少させる遮光部材16を設ける。こうすれば受光素子14に入射される光のレベル変動を小さくすることができる。
【解決手段】 受光素子14の前面に検知範囲のうち近い位置にあるときにはその一部を遮光し、遠ざかるにつれて遮光量を減少させる遮光部材16を設ける。こうすれば受光素子14に入射される光のレベル変動を小さくすることができる。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は検知対象に光を照射し、その反射光によって物体を検出する反射型の光学式センサ装置に関するものである。
【0002】
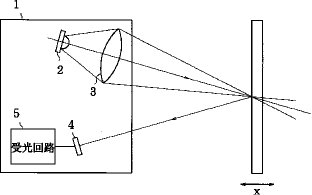
【従来の技術】従来の反射型の光学式センサ装置1は、図12に示すように投光素子2より集束レンズ3によって物体検出範囲に照射し、所定の位置にある物体からの反射光を受光素子4によって受光する。そして受光回路5によって受光レベルを判別して物体の有無を検出するようにしている。この場合には検出すべき物体の光学式センサ装置からの距離は所定範囲内に限定される。
【0003】
【発明が解決しようとする課題】しかるに対象となる物体とセンサ装置との距離が変動する場合には、受光素子で受光される受光量が変動する。例えば対象物体が拡散反射型物体の場合には、対象物体から受光素子までの距離の二乗に反比例して受光量が変動する。従って所定の閾値で物体の有無を判別する場合には、検出範囲が所定の狭い領域に限定され、この範囲内を外れた場合には正確に物体の有無を判別することが難しくなるという欠点があった。又対象物体の色彩や光沢度の相違を受光量の大きさで判別する光学式センサ装置においても、距離変動の影響を受ける。従って検出範囲が所定の狭い領域に限定され、この範囲内を外れた場合には正確に判別できなくなるという欠点があった。
【0004】本発明はこのような従来の問題点に鑑みてなされたものであって、距離変動の影響を少なくして物体の有無や表面状態を検出できるようにすることを目的とする。
【0005】
【課題を解決するための手段】本願の請求項1の発明は、光を物体検出範囲に照射する投光部と、前記投光部より照射される所定の検出範囲にある対象物体からの反射光を受光する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、を具備することを特徴とするものである。
【0006】本願の請求項2の発明は、S偏光又はP偏光のいずれか一方の光を物体検出範囲に照射する投光部と、前記投光部から照射される所定の物体検出範囲にある対象物体からの反射光をS偏光成分及びP偏光成分に分離する偏光ビームスプリッタと、前記偏光ビームスプリッタより分離されたS偏光成分及びP偏光成分の受光レベルを夫々検出する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、前記2つの偏光成分の受光レベルの差に基づいて光沢度を検出し、光沢度の相違により物体を判別することを特徴とするものである。
【0007】このような特徴を有する本願の請求項1,2の発明によれば、受光部の前面に遮光部材が設けられ、遮光部材により検出範囲の近いときに遮光する光量を大きくし、遠ざかるに従い遮光する光量を小さくするようにしている。反射光自体は距離の二乗に反比例して減少するため、遮光部材を配置することによって検出距離の範囲内での反射光の光量変化が小さくなる。そのため物体の有無や光沢度を正確に判別することができる。
【0008】
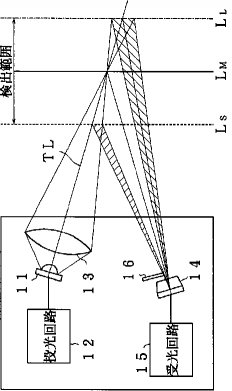
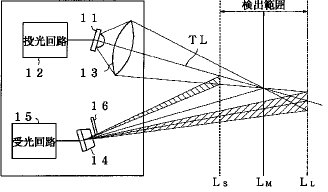
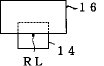
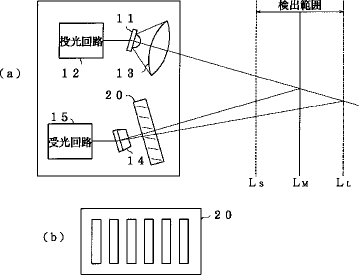
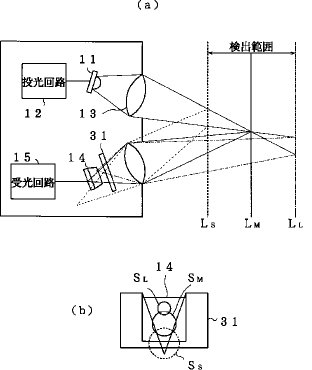
【発明の実施の形態】図1は本発明の第1の実施の形態による光学式センサ装置の構成を示す図である。本図に示すように発光ダイオード等の投光素子11は投光回路12により駆動され、集束レンズ13によって物体の検出範囲に入射される。そして物体検出領域として距離LS 〜LL の検出範囲を有し、この範囲内からの反射光を受光素子14によって受光するものとする。受光素子14の出力は受光回路15によって電気信号に変換され、所定のレベルを越える受光信号があれば物体を検知信号が出力される。さてこの実施の形態では、受光素子14の受光面の前方の投光素子12側に遮光部材16を設ける。遮光部材16は対象物体に近いときに遮光する光量が大きく、物体検出範囲において対象物体が遠ざかるに従い遮光する光量が小さくなるように配置しておく。図2R>2は受光素子14側から見た正面図であり、投光素子側に遮光部材16が設けられ、その一部が隠れている状態を示している。ここでは遮光部材16は検出範囲の最近位置LS 側より入射する反射光がある場合に、その一部を遮光するように配置される。又その検出範囲の中心位置LM から検出範囲の最遠位置LL までの間は光を遮光しないように配置しておく。このように遮光部材16を配置しておくことにより物体検出範囲における光量の変動が低減できることとなる。
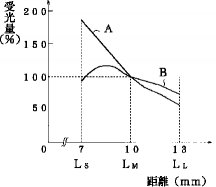
【0009】例えば投光素子11の投光軸TLと光学式センサ装置の前面との角度、及び検出範囲の中心位置LM からの反射光の光軸RLと光学式センサ装置の前面との角度を夫々20°とする。そしてLS =7mm、LM =10mm、LL =13mm、投光レンズの径を8mmφとすると、受光量は遮光部材16がない場合には、図3の曲線Aに示すように距離LS 〜LL の範囲でLM の受光量に対して−40〜+80%まで変動する。ここで検出範囲の中心位置LM の受光量を100%としている。そして遮光部材16を受光素子14の前面から7mmの位置に設け、その端部を受光軸RLより1mm離して配置した場合には、図3の曲線Bに示すように−30〜+20%の変動範囲となる。この場合にも遮光部材16を配置した状態で検出範囲の中心位置LM の受光量を100%としている。受光量のレベルは遮光部材16を配置しない場合の光量よりも低くなる。このように遮光部材16を設けることによって受光レベルの変動幅を小さくすることができる。従って所定の閾値で物体の有無を判別する場合にも、物体の検出範囲ではほぼ誤動作なくその有無を判別することができるという効果が得られる。
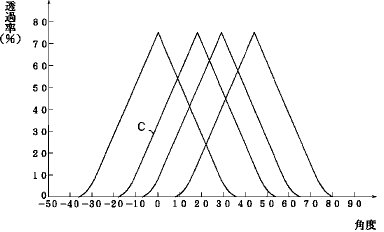
【0010】次に本発明の第2の実施の形態について説明する。第2の実施の形態は第1の実施の形態による遮光部材に代えて、受光軸に対して垂直に鎧戸20を設けたものである。鎧戸20は平行に多数のフィンをその面に対して一定の角度で配置したものである。又図4(b)はこの鎧戸20を示す正面図であり、図示のように多数のフィンによってスリット状に透過する部分が形成されている。このフィンの角度を選択することによって図5に示すように種々の特性の透過率を得ることができる。図5において横軸は鎧戸20より鎧戸の面より垂直に入射する角度を0としてこれに対し左右に入射角が傾いたときの透過率を示している。ここでは受光素子14の面に垂直な法線に対し、時計方向の角度を正として示している。この例では曲線Cに示すように、入射角が18°で最も透過率が高いように鎧戸の面に対して18°傾けたフィンを有する鎧戸20を用いる。こうすれば検出距離範囲の最遠位置LL の際は入射角は18°であるため、ほぼ遮光されることがない。そして受光素子14への入射角が+18°〜−18°に変化するにつれて透過率が徐々に低下する。前述のように受光量の大きさは距離の二乗に反比例するため、透過率の変化によって、前述した第1の実施の形態と同様に、距離に対する受光量の変動量を小さくすることができる。
【0011】次に本発明の第3の実施の形態について図6R>6を用いて説明する。この実施の形態では受光素子の受光位置を反射光を集光する受光レンズの光軸よりずらせるように配置したものである。即ちこの光学式センサ装置の前面には受光レンズ21を配置し、その背後に受光素子22を設ける。受光素子22は図示のように対象物体が検出範囲の最も近い位置LS より近い位置にあれば受光素子22には入光せず、検出範囲のLS 〜LL の範囲内であれば距離がLS よりLL に遠ざかるにつれて反射光の受光素子22に入射する比率を大きくするように配置する。こうすれば反射光量自体は検出距離の二乗に反比例するため、距離LS 〜LL の検出範囲での受光レベルの変化を少なくすることができる。
【0012】次に本発明の第4の実施の形態について図7R>7を用いて説明する。この実施の形態では図1に示す第1の実施の形態と同様に遮光部材を受光素子14の前面に設けたものである。本実施の形態による遮光部材31は図7(b)に示すように、検出範囲内で物体までの距離が変化する場合に反射光のビームスポットの移動方向を中心としてV字形に形成された遮光部材である。検出範囲の最遠位置LL に物体があれば図7(b)に示すようにビームスポットSL の径が最も小さくなるため遮光されず、検出範囲の最も近い位置LS に物体があればビームスポットSS の径が大きくなってその大部分が遮光され、一部分のみが受光素子に入射するように構成される。検出範囲の中心LM に物体があればビームスポットSM の径はその中間となり、その一部分のみが遮光される。こうすれば前述したように反射光の光量自体は距離の二乗に反比例するため、第1の実施の形態と同様に、遮光部材のない場合に比べて受光量の変動を小さくすることができる。
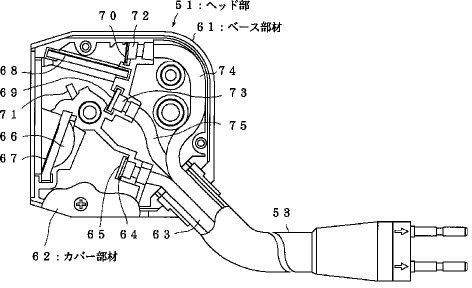
【0013】図8は第5の実施の形態による光学式センサ装置の縦断面図、図9はそのブロック図である。この実施の形態による光学式センサ装置は、ヘッド部51と信号処理部52及びこれらを接続する光ファイバケーブル53によって構成される。ヘッド部51は検出物体に光を投光する投光部とその反射光を受光する受光部とを備えている。信号処理部52は投光部への光を発光する発光素子と、受光部より受光された光を電気信号に変換し受光レベルによって検出物体の有無やその光沢等の表面状態を判定する信号処理回路、表示部を含んで構成されている。
【0014】ヘッド部51は図8に示すように、一面に開口を有するベース部材61と、その開口部を被うカバー部材62によってヘッド部51の筐体が構成される。信号処理部52内に設けられた後述する発光ダイオード等の投光素子の光は光ファイバケーブル53内の投光用光ファイバ63を介してヘッド部51に導かれる。ヘッド部51内にはこの投光用光ファイバ63の出射方向にコリメートレンズ64,拡散板65が設けられ、これと一定間隔を隔てて投光レンズ66及び偏光フィルタ67が設けられる。投光レンズ66はP偏光又はS偏光のいずれかの偏光成分の光を物体検出範囲に照射するものである。そして受光側にはこの照射された光の反射光を受光する位置に偏光ビームスプリッタ68が配置される。又その反射光の一部を遮光する遮光部材69が設けられる。偏光ビームスプリッタ68は受光した光をS偏光成分とP偏光成分とに分離するビームスプリッタであり、S偏光成分及びP偏光成分は夫々受光部に入射される。夫々の受光部には偏光フィルタ70,71及び受光レンズ72,73が設けられており、偏光ビームスプリッタ68で分離されたP偏光及びS偏光の反射光成分を夫々受光用光ファイバ74,75によって受光するものである。
【0015】図9はこの実施の形態による光学式センサ装置の全体構成を示すブロック図である。本図においてこの光学式センサ装置50はヘッド部51と信号処理部52とから成り立っている。信号処理部52は所定周期毎に投光素子81を駆動する投光回路82と、受光素子83,84に接続されたS側受光回路85及びP側受光回路86を有している。受光回路85,86は夫々S偏光成分及びP偏光成分の光を受光する受光回路であって、その出力はマイクロコンピュータ(CPU)87に与えられる。マイクロコンピュータ87には発振回路88,電源89,モード切換スイッチ90,感度設定ボタン91が接続され、メモリとしてEEPROM92,出力回路93が接続されている。マイクロコンピュータ87は所定のタイミングで投光素子81を周期的に駆動し、受光信号によって閾値を設定して物体の表面状態の変化を検出するものである。出力回路93は物体を検知して検出出力を出すと共に、物体検知の安定/非安定状態を検出して安定/非安定出力を出すものである。
【0016】この光学式センサ装置において入射光をいずれか一方の偏光成分、例えばS偏光成分を有する光とすると、光沢度が小さい物体では偏光方向が保存された正反射光も得られるが、それ以外にS偏光成分とP偏光成分とが夫々等しい拡散反射光のレベルが高くなる。一方光沢度が大きければ、P偏光成分とS偏光成分とのレベルが等しい拡散反射光の全体の光量が低くなり、偏光方向を保存するS偏光の正反射光のレベルが相対的に高くなる。従ってS偏光成分とP偏光成分との差から光沢度を検出することができる。この実施の形態においても遮光部材69が設けられているため、検出範囲の近距離例側に近づくにつれて遮光される割合が多くなる。そのため反射光全体のレベル変動を小さくすることができる。
【0017】図10は台紙上に設けられたラベルを瓶や箱等に張り付ける処理を示す概略図である。この実施の形態では前述した第5の実施の形態の光学式センサ装置をラベルの位置決め検出用として使用しており、台紙とラベルとを光沢度によって識別し、ラベルの位置を確認することができる。そしてラベルを瓶に張り付けた後は瓶とラベルとの光沢差を検出することによって所定位置への張り付け処理を確認するようにしている。そして台紙や瓶に対する光学センサからの位置が変動する場合にも、反射光の光量変化を少なくすることができ、ラベルの有無を確実に識別することができる。
【0018】図11は第5の実施の形態による光学式センサ装置を利用したカラーマークの検出状態を示す図である。この場合もシート上のカラーマークの有無を光学式センサ装置で判別する際に、シートと光学式センサ装置との間隙が変化する場合にも正確にその有無を判別することができる。
【0019】
【発明の効果】以上詳細に説明したように本願の請求項1,2の発明によれば、反射光のレベルや光沢度等を検出する光学式センサ装置において、一定の検出領域を設けたときにその範囲内では物体の位置にかかわらず受光レベルの変動を小さくすることができる。従って安定して物体の有無や光沢度を検出することができるという効果が得られる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態による光学式センサ装置の構成を示す図である。
【図2】本発明の第1の実施の形態による受光素子と遮光部材16の関係を示す図である。
【図3】この実施の形態による検出距離に対する受光量の変化を示す図である。
【図4】本発明の第2の実施の形態による光学式センサ装置の構成を示す図である。
【図5】この実施の形態による受光素子への入射角度と透過率を示すグラフである。
【図6】本発明の第3の実施の形態による光学式センサ装置の構成を示す図である。
【図7】(a)は本発明の第4の実施の形態による光学式センサ装置の構成を示す図、(b)は受光素子と遮光部材を示す正面図である。
【図8】本発明の第5の実施の形態による光学式センサ装置の構成を示す断面図である。
【図9】本発明の第5の実施の形態による光学式センサ装置の構成を示すブロック図である。
【図10】この実施の形態による光学式センサ装置をラベルセンサに適用した使用例を示す斜視図である。
【図11】この実施の形態による光学式センサ装置をカラーマークセンサとして用いた使用例を示す斜視図である。
【図12】従来の光学式センサ装置の一例を示す概略図である。
【符号の説明】
11 投光素子
12 投光回路
13,66 投光レンズ
14,22 受光素子
15 受光回路
16,31,69 遮光部材
20 鎧戸
21,72,73 受光レンズ
51 ヘッド部
52 信号処理部
67,70,71 偏光ビームスプリッタ
【0001】
【発明の属する技術分野】本発明は検知対象に光を照射し、その反射光によって物体を検出する反射型の光学式センサ装置に関するものである。
【0002】
【従来の技術】従来の反射型の光学式センサ装置1は、図12に示すように投光素子2より集束レンズ3によって物体検出範囲に照射し、所定の位置にある物体からの反射光を受光素子4によって受光する。そして受光回路5によって受光レベルを判別して物体の有無を検出するようにしている。この場合には検出すべき物体の光学式センサ装置からの距離は所定範囲内に限定される。
【0003】
【発明が解決しようとする課題】しかるに対象となる物体とセンサ装置との距離が変動する場合には、受光素子で受光される受光量が変動する。例えば対象物体が拡散反射型物体の場合には、対象物体から受光素子までの距離の二乗に反比例して受光量が変動する。従って所定の閾値で物体の有無を判別する場合には、検出範囲が所定の狭い領域に限定され、この範囲内を外れた場合には正確に物体の有無を判別することが難しくなるという欠点があった。又対象物体の色彩や光沢度の相違を受光量の大きさで判別する光学式センサ装置においても、距離変動の影響を受ける。従って検出範囲が所定の狭い領域に限定され、この範囲内を外れた場合には正確に判別できなくなるという欠点があった。
【0004】本発明はこのような従来の問題点に鑑みてなされたものであって、距離変動の影響を少なくして物体の有無や表面状態を検出できるようにすることを目的とする。
【0005】
【課題を解決するための手段】本願の請求項1の発明は、光を物体検出範囲に照射する投光部と、前記投光部より照射される所定の検出範囲にある対象物体からの反射光を受光する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、を具備することを特徴とするものである。
【0006】本願の請求項2の発明は、S偏光又はP偏光のいずれか一方の光を物体検出範囲に照射する投光部と、前記投光部から照射される所定の物体検出範囲にある対象物体からの反射光をS偏光成分及びP偏光成分に分離する偏光ビームスプリッタと、前記偏光ビームスプリッタより分離されたS偏光成分及びP偏光成分の受光レベルを夫々検出する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、前記2つの偏光成分の受光レベルの差に基づいて光沢度を検出し、光沢度の相違により物体を判別することを特徴とするものである。
【0007】このような特徴を有する本願の請求項1,2の発明によれば、受光部の前面に遮光部材が設けられ、遮光部材により検出範囲の近いときに遮光する光量を大きくし、遠ざかるに従い遮光する光量を小さくするようにしている。反射光自体は距離の二乗に反比例して減少するため、遮光部材を配置することによって検出距離の範囲内での反射光の光量変化が小さくなる。そのため物体の有無や光沢度を正確に判別することができる。
【0008】
【発明の実施の形態】図1は本発明の第1の実施の形態による光学式センサ装置の構成を示す図である。本図に示すように発光ダイオード等の投光素子11は投光回路12により駆動され、集束レンズ13によって物体の検出範囲に入射される。そして物体検出領域として距離LS 〜LL の検出範囲を有し、この範囲内からの反射光を受光素子14によって受光するものとする。受光素子14の出力は受光回路15によって電気信号に変換され、所定のレベルを越える受光信号があれば物体を検知信号が出力される。さてこの実施の形態では、受光素子14の受光面の前方の投光素子12側に遮光部材16を設ける。遮光部材16は対象物体に近いときに遮光する光量が大きく、物体検出範囲において対象物体が遠ざかるに従い遮光する光量が小さくなるように配置しておく。図2R>2は受光素子14側から見た正面図であり、投光素子側に遮光部材16が設けられ、その一部が隠れている状態を示している。ここでは遮光部材16は検出範囲の最近位置LS 側より入射する反射光がある場合に、その一部を遮光するように配置される。又その検出範囲の中心位置LM から検出範囲の最遠位置LL までの間は光を遮光しないように配置しておく。このように遮光部材16を配置しておくことにより物体検出範囲における光量の変動が低減できることとなる。
【0009】例えば投光素子11の投光軸TLと光学式センサ装置の前面との角度、及び検出範囲の中心位置LM からの反射光の光軸RLと光学式センサ装置の前面との角度を夫々20°とする。そしてLS =7mm、LM =10mm、LL =13mm、投光レンズの径を8mmφとすると、受光量は遮光部材16がない場合には、図3の曲線Aに示すように距離LS 〜LL の範囲でLM の受光量に対して−40〜+80%まで変動する。ここで検出範囲の中心位置LM の受光量を100%としている。そして遮光部材16を受光素子14の前面から7mmの位置に設け、その端部を受光軸RLより1mm離して配置した場合には、図3の曲線Bに示すように−30〜+20%の変動範囲となる。この場合にも遮光部材16を配置した状態で検出範囲の中心位置LM の受光量を100%としている。受光量のレベルは遮光部材16を配置しない場合の光量よりも低くなる。このように遮光部材16を設けることによって受光レベルの変動幅を小さくすることができる。従って所定の閾値で物体の有無を判別する場合にも、物体の検出範囲ではほぼ誤動作なくその有無を判別することができるという効果が得られる。
【0010】次に本発明の第2の実施の形態について説明する。第2の実施の形態は第1の実施の形態による遮光部材に代えて、受光軸に対して垂直に鎧戸20を設けたものである。鎧戸20は平行に多数のフィンをその面に対して一定の角度で配置したものである。又図4(b)はこの鎧戸20を示す正面図であり、図示のように多数のフィンによってスリット状に透過する部分が形成されている。このフィンの角度を選択することによって図5に示すように種々の特性の透過率を得ることができる。図5において横軸は鎧戸20より鎧戸の面より垂直に入射する角度を0としてこれに対し左右に入射角が傾いたときの透過率を示している。ここでは受光素子14の面に垂直な法線に対し、時計方向の角度を正として示している。この例では曲線Cに示すように、入射角が18°で最も透過率が高いように鎧戸の面に対して18°傾けたフィンを有する鎧戸20を用いる。こうすれば検出距離範囲の最遠位置LL の際は入射角は18°であるため、ほぼ遮光されることがない。そして受光素子14への入射角が+18°〜−18°に変化するにつれて透過率が徐々に低下する。前述のように受光量の大きさは距離の二乗に反比例するため、透過率の変化によって、前述した第1の実施の形態と同様に、距離に対する受光量の変動量を小さくすることができる。
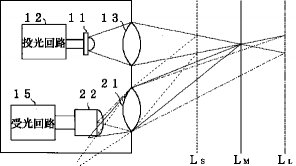
【0011】次に本発明の第3の実施の形態について図6R>6を用いて説明する。この実施の形態では受光素子の受光位置を反射光を集光する受光レンズの光軸よりずらせるように配置したものである。即ちこの光学式センサ装置の前面には受光レンズ21を配置し、その背後に受光素子22を設ける。受光素子22は図示のように対象物体が検出範囲の最も近い位置LS より近い位置にあれば受光素子22には入光せず、検出範囲のLS 〜LL の範囲内であれば距離がLS よりLL に遠ざかるにつれて反射光の受光素子22に入射する比率を大きくするように配置する。こうすれば反射光量自体は検出距離の二乗に反比例するため、距離LS 〜LL の検出範囲での受光レベルの変化を少なくすることができる。
【0012】次に本発明の第4の実施の形態について図7R>7を用いて説明する。この実施の形態では図1に示す第1の実施の形態と同様に遮光部材を受光素子14の前面に設けたものである。本実施の形態による遮光部材31は図7(b)に示すように、検出範囲内で物体までの距離が変化する場合に反射光のビームスポットの移動方向を中心としてV字形に形成された遮光部材である。検出範囲の最遠位置LL に物体があれば図7(b)に示すようにビームスポットSL の径が最も小さくなるため遮光されず、検出範囲の最も近い位置LS に物体があればビームスポットSS の径が大きくなってその大部分が遮光され、一部分のみが受光素子に入射するように構成される。検出範囲の中心LM に物体があればビームスポットSM の径はその中間となり、その一部分のみが遮光される。こうすれば前述したように反射光の光量自体は距離の二乗に反比例するため、第1の実施の形態と同様に、遮光部材のない場合に比べて受光量の変動を小さくすることができる。
【0013】図8は第5の実施の形態による光学式センサ装置の縦断面図、図9はそのブロック図である。この実施の形態による光学式センサ装置は、ヘッド部51と信号処理部52及びこれらを接続する光ファイバケーブル53によって構成される。ヘッド部51は検出物体に光を投光する投光部とその反射光を受光する受光部とを備えている。信号処理部52は投光部への光を発光する発光素子と、受光部より受光された光を電気信号に変換し受光レベルによって検出物体の有無やその光沢等の表面状態を判定する信号処理回路、表示部を含んで構成されている。
【0014】ヘッド部51は図8に示すように、一面に開口を有するベース部材61と、その開口部を被うカバー部材62によってヘッド部51の筐体が構成される。信号処理部52内に設けられた後述する発光ダイオード等の投光素子の光は光ファイバケーブル53内の投光用光ファイバ63を介してヘッド部51に導かれる。ヘッド部51内にはこの投光用光ファイバ63の出射方向にコリメートレンズ64,拡散板65が設けられ、これと一定間隔を隔てて投光レンズ66及び偏光フィルタ67が設けられる。投光レンズ66はP偏光又はS偏光のいずれかの偏光成分の光を物体検出範囲に照射するものである。そして受光側にはこの照射された光の反射光を受光する位置に偏光ビームスプリッタ68が配置される。又その反射光の一部を遮光する遮光部材69が設けられる。偏光ビームスプリッタ68は受光した光をS偏光成分とP偏光成分とに分離するビームスプリッタであり、S偏光成分及びP偏光成分は夫々受光部に入射される。夫々の受光部には偏光フィルタ70,71及び受光レンズ72,73が設けられており、偏光ビームスプリッタ68で分離されたP偏光及びS偏光の反射光成分を夫々受光用光ファイバ74,75によって受光するものである。
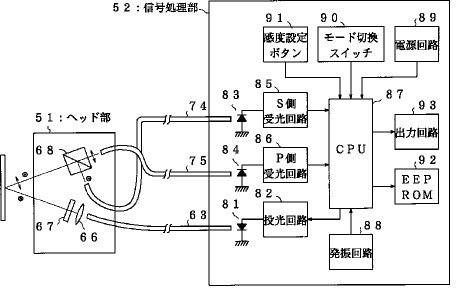
【0015】図9はこの実施の形態による光学式センサ装置の全体構成を示すブロック図である。本図においてこの光学式センサ装置50はヘッド部51と信号処理部52とから成り立っている。信号処理部52は所定周期毎に投光素子81を駆動する投光回路82と、受光素子83,84に接続されたS側受光回路85及びP側受光回路86を有している。受光回路85,86は夫々S偏光成分及びP偏光成分の光を受光する受光回路であって、その出力はマイクロコンピュータ(CPU)87に与えられる。マイクロコンピュータ87には発振回路88,電源89,モード切換スイッチ90,感度設定ボタン91が接続され、メモリとしてEEPROM92,出力回路93が接続されている。マイクロコンピュータ87は所定のタイミングで投光素子81を周期的に駆動し、受光信号によって閾値を設定して物体の表面状態の変化を検出するものである。出力回路93は物体を検知して検出出力を出すと共に、物体検知の安定/非安定状態を検出して安定/非安定出力を出すものである。
【0016】この光学式センサ装置において入射光をいずれか一方の偏光成分、例えばS偏光成分を有する光とすると、光沢度が小さい物体では偏光方向が保存された正反射光も得られるが、それ以外にS偏光成分とP偏光成分とが夫々等しい拡散反射光のレベルが高くなる。一方光沢度が大きければ、P偏光成分とS偏光成分とのレベルが等しい拡散反射光の全体の光量が低くなり、偏光方向を保存するS偏光の正反射光のレベルが相対的に高くなる。従ってS偏光成分とP偏光成分との差から光沢度を検出することができる。この実施の形態においても遮光部材69が設けられているため、検出範囲の近距離例側に近づくにつれて遮光される割合が多くなる。そのため反射光全体のレベル変動を小さくすることができる。
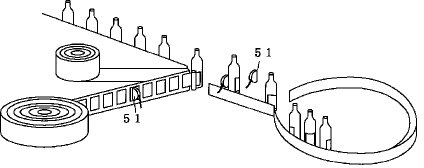
【0017】図10は台紙上に設けられたラベルを瓶や箱等に張り付ける処理を示す概略図である。この実施の形態では前述した第5の実施の形態の光学式センサ装置をラベルの位置決め検出用として使用しており、台紙とラベルとを光沢度によって識別し、ラベルの位置を確認することができる。そしてラベルを瓶に張り付けた後は瓶とラベルとの光沢差を検出することによって所定位置への張り付け処理を確認するようにしている。そして台紙や瓶に対する光学センサからの位置が変動する場合にも、反射光の光量変化を少なくすることができ、ラベルの有無を確実に識別することができる。
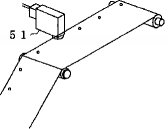
【0018】図11は第5の実施の形態による光学式センサ装置を利用したカラーマークの検出状態を示す図である。この場合もシート上のカラーマークの有無を光学式センサ装置で判別する際に、シートと光学式センサ装置との間隙が変化する場合にも正確にその有無を判別することができる。
【0019】
【発明の効果】以上詳細に説明したように本願の請求項1,2の発明によれば、反射光のレベルや光沢度等を検出する光学式センサ装置において、一定の検出領域を設けたときにその範囲内では物体の位置にかかわらず受光レベルの変動を小さくすることができる。従って安定して物体の有無や光沢度を検出することができるという効果が得られる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態による光学式センサ装置の構成を示す図である。
【図2】本発明の第1の実施の形態による受光素子と遮光部材16の関係を示す図である。
【図3】この実施の形態による検出距離に対する受光量の変化を示す図である。
【図4】本発明の第2の実施の形態による光学式センサ装置の構成を示す図である。
【図5】この実施の形態による受光素子への入射角度と透過率を示すグラフである。
【図6】本発明の第3の実施の形態による光学式センサ装置の構成を示す図である。
【図7】(a)は本発明の第4の実施の形態による光学式センサ装置の構成を示す図、(b)は受光素子と遮光部材を示す正面図である。
【図8】本発明の第5の実施の形態による光学式センサ装置の構成を示す断面図である。
【図9】本発明の第5の実施の形態による光学式センサ装置の構成を示すブロック図である。
【図10】この実施の形態による光学式センサ装置をラベルセンサに適用した使用例を示す斜視図である。
【図11】この実施の形態による光学式センサ装置をカラーマークセンサとして用いた使用例を示す斜視図である。
【図12】従来の光学式センサ装置の一例を示す概略図である。
【符号の説明】
11 投光素子
12 投光回路
13,66 投光レンズ
14,22 受光素子
15 受光回路
16,31,69 遮光部材
20 鎧戸
21,72,73 受光レンズ
51 ヘッド部
52 信号処理部
67,70,71 偏光ビームスプリッタ
【特許請求の範囲】
【請求項1】 光を物体検出範囲に照射する投光部と、前記投光部より照射される所定の検出範囲にある対象物体からの反射光を受光する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、を具備することを特徴とする光学式センサ装置。
【請求項2】 S偏光又はP偏光のいずれか一方の光を物体検出範囲に照射する投光部と、前記投光部から照射される所定の物体検出範囲にある対象物体からの反射光をS偏光成分及びP偏光成分に分離する偏光ビームスプリッタと、前記偏光ビームスプリッタより分離されたS偏光成分及びP偏光成分の受光レベルを夫々検出する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、前記2つの偏光成分の受光レベルの差に基づいて光沢度を検出し、光沢度の相違により物体を判別することを特徴とする光学式センサ装置。
【請求項1】 光を物体検出範囲に照射する投光部と、前記投光部より照射される所定の検出範囲にある対象物体からの反射光を受光する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、を具備することを特徴とする光学式センサ装置。
【請求項2】 S偏光又はP偏光のいずれか一方の光を物体検出範囲に照射する投光部と、前記投光部から照射される所定の物体検出範囲にある対象物体からの反射光をS偏光成分及びP偏光成分に分離する偏光ビームスプリッタと、前記偏光ビームスプリッタより分離されたS偏光成分及びP偏光成分の受光レベルを夫々検出する受光部と、前記受光部の受光面の前面に配置され、物体検出範囲において対象物体に近いときに遮光する光量が大きく、対象物体が遠ざかるに従い遮光する光量が小さくなるように配置された遮光部材と、前記2つの偏光成分の受光レベルの差に基づいて光沢度を検出し、光沢度の相違により物体を判別することを特徴とする光学式センサ装置。
【図1】


【図2】
【図3】
【図4】
【図6】
【図10】
【図11】
【図5】
【図7】
【図12】
【図8】
【図9】
【図2】
【図3】
【図4】
【図6】
【図10】
【図11】
【図5】
【図7】
【図12】
【図8】
【図9】
【公開番号】特開平10−122954
【公開日】平成10年(1998)5月15日
【国際特許分類】
【出願番号】特願平8−279588
【出願日】平成8年(1996)10月22日
【出願人】(000002945)オムロン株式会社 (3,542)
【公開日】平成10年(1998)5月15日
【国際特許分類】
【出願日】平成8年(1996)10月22日
【出願人】(000002945)オムロン株式会社 (3,542)
[ Back to top ]