
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、受光部の受光状態に基づき物体を検出する検出部とを備える光学式センサに関する。特に本発明は、センサからあらかじめ定めた基準の距離を隔てた位置にある物体を検出する目的に使用される光学式センサに関する。
【背景技術】
【0002】
物体検出用の光学式センサは、一般に、投光部から出射した光に対して受光部が受光した反射光の強度を計測し、その計測により得た計測値をしきい値と比較する方法により物体の有無を検出する。しかし、より精度の高い検出を行いたい場合には、受光状態に基づき物体の変位を計測する機能を具備するセンサが用いられる。
【0003】
変位の計測機能を具備する光学式センサを用いた物体検出処理に関して、特許文献1には、少なくとも一方向に配列された複数の受光素子によって、投光部からの光に対する物体からの反射光を受光し、各受光素子における受光量分布の中のピークの位置をあらかじめ定めた基準位置と照合することにより、物体の有無を判別することが記載されている。また、この特許文献1には、受光量分布から複数のピークが検出されたことをもって、多重反射が生じていると判別することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−221491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
反射光の受光状態に基づいて物体の位置を検出するには、検出対象の物体で反射した光のみが受光部に導かれるのが望ましいが、センサの使用状態や周囲の環境によって、検出対象物以外の構造物からの光が受光部に入射し、誤検出が生じるおそれがある。その例を、以下、図5〜7を参照して説明する。
【0006】
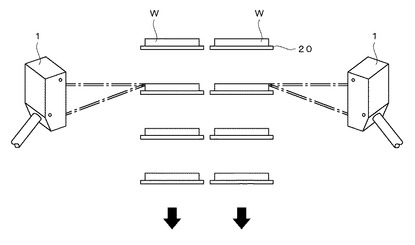
図5は、特許文献1に記載されているのと同種のセンサを利用したアプリケーションの例を示す。このアプリケーションでは、パレット20に搭載され、かつ2列に配列されて下方に移動する板状のワークWを所定の高さ位置で検出することを目的とするもので、各列の検出対象位置の側方にそれぞれセンサ1,1が配備されている。各センサ1は、検出対象位置に到達したワークWの端面からの反射光を受光して、受光量分布中のピークの位置を検出し、その検出位置が登録されている基準位置に適合することを確認して「ワークあり」の検出信号を出力する。
【0007】
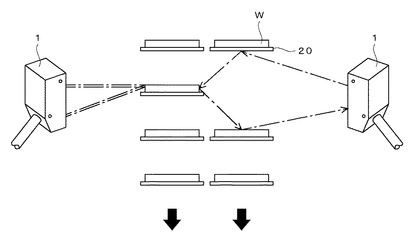
図6および図7は、上記のアプリケーションにおいて生じる誤検出の例を示す。図6の例では、図中の右側の列でワークWの欠落が生じ、センサ1から斜め上方向に進行した光が欠落箇所の上方のパレット20、隣の列のワークW,欠落箇所の下方のワークWなどに反射した後に、これらの反射を経た光(迷光)がセンサ1に入光している。
【0008】
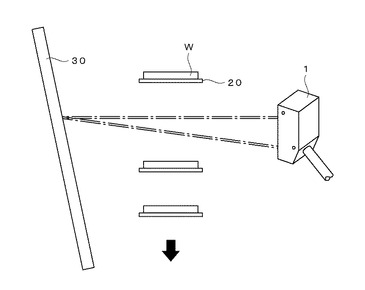
図7の例では、ワークWは一列に配列され、このワークWの列を挟んでセンサ1に対向する位置に、鏡面反射性の高い部材(鏡体)30が置かれている。この例では、ワークWの配列に欠落が生じ、センサ1から出てワークWの欠落箇所を通過した光が鏡体30の表面で正反射し、その正反射光がセンサ1に入光している。
【0009】
なお、図6,図7の例では、ワークWの配列に欠落が出た場合を想定しているが、ワークWが欠落していない場合でも、検出対象位置にワークWが到達していない状態下で同様のノイズ光がセンサに入光する可能性がある。また、周囲で突発的に発生した光がセンサに入射する場合もある。検出の場所が窓に近い場合には、時間帯によっては窓から差し込んだ日光がセンサに入射する可能性もある。
【0010】
これらのノイズ光がセンサ1に入光する場合でも、受光量分布中のピークが基準位置から十分に離れていれば、誤検出が生じるおそれはない。しかし、ノイズ光によるピークが基準位置の付近に生じた場合には、そのピークが検出対象位置のワークWに相当するものとして誤検出されるおそれがある。
【0011】
特許文献1にも、図5〜7の例に類似するアプリケーションが示されているが、このアプリケーションでは、受光量分布から複数のピークが生じた場合に、それらのピークは多重反射を反映したものであり、ワークの端面は検出されていないと判断する(特許文献1の段落0073〜0074,図19を参照。)。しかし、このような処理では、複数のピークが生じることなく、ノイズ光が基準位置付近に入射した場合には、誤検出が生じてしまう。
【0012】
本発明は上記の問題に着目し、ノイズ光の入射により、検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、そのような誤った判断がされることなく、精度の良い検出ができるようにすることを課題とする。
【課題を解決するための手段】
【0013】
本発明は、検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、受光部の受光状態に基づき物体を検出する検出部とを具備する光学式センサに適用される。本発明による検出部は、受光部の受光状態に基づき、投光部からの光を反射した物体とセンサとの間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータの変化の度合いまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段と、第1の判別手段により物体との距離が基準距離に適合すると判別され、かつ第2の判別手段により判別対象のパラメータの変化の度合いが許容範囲に入っていると判別されたことを条件として、物体を検出したことを示す検出信号を出力する検出手段とを具備する。
【0014】
この種のセンサにおいては、一般に、検出を開始するに先立ち、検出対象位置にある検出対象物からの反射光を検出に適した強度で受光できるように感度を調整し、検出動作中も、適宜、受光量に基づいて感度を調整する。したがって、図5の例のように、規格化されたワークWを検出対象として、検出対象位置に到達するワークWを検出する場合に、ワークWからの反射光を正しく受光する状態が続いている間の受光量が大きく変化するとは考えにくい。
【0015】
一方、図6の例のように、様々な場所を廻ってセンサに入るノイズ光は、検出対象位置にあるワークWからの反射光より弱い光になると考えられる。また、図7の例のような鏡体300からの正反射光は、検出対象位置にあるワークWからの反射光よりも強い光になると考えられる。
【0016】
このように、検出対象位置にあるワークからの反射光の強度とノイズ光の強度との間には、大きな差が生じる可能性が高い。この点に着目して、本発明では、受光状態に基づき判別された物体とセンサとの間の距離が基準距離に適合することと、受光量を表すパラメータ(たとえば、一次元に配列された受光素子により得た受光量分布のピークの値)の変化の度合い、または受光量の増減に応じて調整される感度パラメータ(たとえば露光時間)の変化の度合いが許容範囲に入っていることとを、物体を検出したことを示す検出信号を出力するための条件とする。そうすると、ノイズ光によって物体が検出対象位置にあると判断され得る受光状態が生じた場合でも、その受光量や受光量に基づき調整される感度に大きな変化が生じるので、第2の判別手段による判別対象のパラメータに許容範囲を超える変化が生じ、物体の検出にかかる条件の1つが満たされない状態となる。これによりノイズ光による誤検出が生じるのを防ぐことができる。
【0017】
上記のセンサの一実施形態は、投光部および受光部の動作期間を決める露光時間の長さを、受光部により得られた受光量の増減に応じて調整する調整手段を備えており、第2の判別手段は露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別する。
基準位置にある検出対象物からの反射光を受光している場合の受光量を検出に適した強度で安定させるには、一般に、受光量が増加した場合には露光時間を短くし、受光量が減少した場合には露光時間を長くする調整が行われる。この調整によれば、ノイズ光を受光すると、受光量が大きく変化するので、露光時間も大きく変化する。よって、受光状態に基づく判別の結果と共に、露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別することによって、ノイズ光の受光による誤検出が生じるのを防ぐことができる。
【0018】
上記のセンサの他の一実施形態では、受光部は、少なくとも一方向に沿って配列される複数の受光素子を具備する。また第1の判別手段は、各受光素子により得られる受光量分布中のピークの位置をあらかじめ定めた基準位置と照合することにより、投光部からの光を反射した物体とセンサとの間の距離が基準距離に適合するか否かを判別する。また第2の判別手段は、受光量分布中のピークの受光量の変化の度合いが許容範囲に含まれるか否かを判別する。
【0019】
この実施形態は、検出対象物からの反射光を反映した受光量のピークを検出している状態からノイズ光を反映した受光量のピークを検出している状態になると、ピークの高さが大きく変化する場合に適用することができる。この実施形態によれば、物体の有無を判別するのに用いられる受光量分布中のピークの変化の度合いをチェックすることにより、ノイズ光の受光による誤検出が生じるのを防ぐことができる。
【0020】
さらに上記のセンサの他の実施形態では、第2の判別手段は、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間内における変化の度合いを、それぞれ許容範囲を表す上限値および下限値と比較するように設定される。さらに、この実施形態のセンサは、上限値および下限値を設定するためのデータを入力する入力手段と、入力されたデータに基づく上限値および下限値を第2の判別手段に設定する設定手段とを具備する。
【0021】
基準位置にある検出対象物からの反射光を受光している場合に生じる受光量の変動範囲は、検出対象物の材質、センサと基準位置との間の距離など、センサの使用環境上の様々な要素に応じて変動する。上記の実施形態では、第2の判別手段が使用する許容範囲を決める上限値および下限値を、入力に応じて設定することができるので、センサの利便性や汎用性を高めることができる。
【0022】
他の実施形態によるセンサには、第2の判別手段の判別に用いられる許容範囲を表すパラメータとして、当該許容範囲の上限値αが登録される登録手段が設けられる。第2の判別手段は、上限値αの逆数1/αを許容範囲の下限値として、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いが、1/αからαまでの範囲に入るか否かを判別する。αの値は、1つ前の実施形態と同様に入力手段より入力してもよいし、検出対象物のモデルを用いた検出テストなどに基づき特定してもよい。
【0023】
他の実施形態によるセンサは、第2の判別手段の機能を有効にする設定と無効にする設定とを切り替える切替手段をさらに具備する。また、この実施形態の検出手段は、第2の判別手段の機能が無効に設定されている場合には、第1の判別手段により物体との距離が基準距離に適合すると判別されたことのみを条件として、物体を検出したことを示す検出信号を出力する。
【0024】
上記の実施形態によれば、ノイズ光による誤検出が生じる可能性のない現場においては、第2の判別手段の機能を無効にすることによって、第1の判別手段による判別結果のみに基づく検出を行うことができる。
切替手段による有効と無効との切り替えは、センサに設けられた操作部における切替操作に応じて行ってもよいし、外部機器からの入力に応じて行ってもよい。または、内部のタイマがあらかじめ定めた時間を示したとき、検出エラーの回数が所定の値に達したときなど、あらかじめ定められた条件が成立したことを契機として切り替えを行うようにしてもよい。
【発明の効果】
【0025】
本発明によれば、基準位置にある検出対象物からの反射光とは異なるノイズ光が受光部に入射した場合でも、そのノイズ光によって物体を検出したという誤検出が生じるのを防ぐことができる。これにより基準の位置にある物体を精度良く検出することが可能になる。
【図面の簡単な説明】
【0026】
【図1】光学式センサの構成例を示すブロック図である。
【図2】センサの使用例と検出の原理とを示す模式図である。
【図3】感度パラメータの導出処理に関するフローチャートである。
【図4】検出処理に関するフローチャートである。
【図5】光学式センサの導入例を示す図である。
【図6】ノイズ光が生じる例を示す図である。
【図7】ノイズ光が生じる例を示す図である。
【発明を実施するための形態】
【0027】
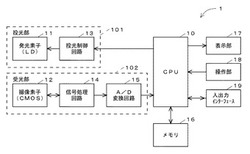
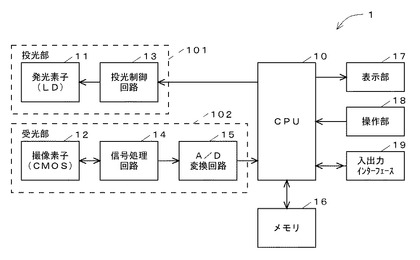
図1は、本発明が適用される光学式センサの電気構成を示す。
この実施例のセンサ1は、発光素子(レーザダイオード)11を含む投光部101や、一次元の撮像素子(CMOS)12を含む受光部102を有する。投光部101には、発光素子11のほか、投光制御回路13が含まれる。受光部102には、撮像素子12のほか、この撮像素子12により生成された画像信号を処理するための信号処理回路14やA/D変換回路15が設けられる。
【0028】
このほか、センサ1には、CPU10,メモリ16,表示部17,操作部18,入出力インターフェース19などが設けられる。投光部101および受光部102は、図2に示すセンサヘッド100に収容され、その他の構成は、「アンプ部」と呼ばれる補助筐体(図示せず。)に設けられる。ただし、センサの構成はこれに限らず、たとえば、全ての構成を1つの筐体に配備することも可能である。
【0029】
CPU10は、メモリ16に格納されたプログラムに基づき検出処理や感度調整に関わる処理を実行する。検出結果は、表示部17に表示されるほか、入出力インターフェース19を介して外部に出力される。操作部18は、検出処理に先立つ種々の設定を行う場合に用いられる。
【0030】
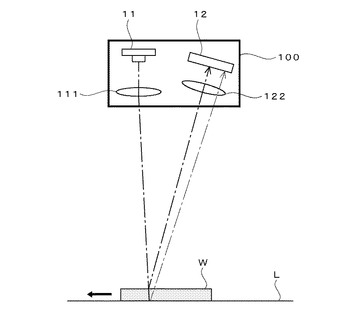
図2は、センサヘッド100の構成および検出動作の原理を模式的に示す。
センサヘッド100は、発光素子11の光軸をワークWの経路Lの検出対象位置に合わせた状態にして配備される。
発光素子11から出射されたレーザ光は、投光レンズ111を介して出射された後に検出対象の物体で反射し、受光用レンズ122を介して撮像素子12に入射する。よって、撮像素子12により生成される反射光像が示す受光量分布には、反射光の入射位置に対応する箇所にピークが現れる。また検査対象位置にワークWがある場合とない場合とでは、撮像素子12における反射光の入射位置が異なるので、受光量分布中のピークの位置に基づき物体の位置を判断することができる。
【0031】
上記の原理を利用して、この実施例では、設定モードにおいて、ワークWを検出対象位置に配置した状態で投光および受光を行って、受光量分布に現れた最大ピークの重心の座標を基準位置として登録する。投光処理が開始されると、投光動作および受光動作を繰り返しながら、毎回の受光量分布中の最大ピークの重心の座標を検出し、その座標を基準位置と照合することによって、検出対象位置に到達したワークWを検出する。また、図5に示したように、上下動するワークWを所定の高さ位置で検出したい場合には、ワークWの経路の側方にセンサヘッド100を配備して、ワークWの端面を検出する方法をとることができる。
【0032】
いずれの検出例においても、検出対象位置にあるワークWからの反射光により受光量分布に生じるピークの位置を基準位置として登録することは、間接的に、検出対象位置にあるワークWとセンサヘッド100との距離(基準距離)を登録していることになると考えられる。また検出処理において、受光量分布中の最大ピークの重心の座標を基準位置と照合することは、投光部101からの光を反射した物体(図2の例ではワークWまたは経路Lの表面)とセンサヘッド100との距離が基準距離に適合するか否かを判別する処理に相当する。この判別処理によれば、たとえば図2の例においては、検出対象のワークWとは異なる高さの物体が検出対象位置に到達しても、その物体によって「ワークあり」を示す検出信号が出力されるのを防ぐことができる。
【0033】
しかしながら、受光量パターン中の基準位置の付近に現れるピークの全てが検出対象のワークWからの反射光によるものとは限らず、ノイズ光が基準位置の付近に入射したことにより生じる場合もある。
【0034】
この点に鑑み、この実施例では、受光量分布パターン中の最大ピークの位置を検出するより前に、この最大ピークが示す最大の受光量の増減に追随して調整される露光時間の変化の度合いをチェックし、この変化の度合いが許容範囲内に入り、かつ受光量分布中の最大ピークの位置が登録された基準位置に適合することを条件として、「ワークあり」を示す検出信号を出力する。
【0035】
ここで、この実施例で実施される感度調整について説明する。
この実施例では、露光時間、投光されるレーザ光の強度(以下、「投光強度」という。)、受光量信号の増幅率(以下、「受光ゲイン」という。)の3種類のパラメータを調整することによって感度を調整する。また、基準位置の登録処理より先に、ワークWを検出対象位置に配置した状態で前述した投光および受光を行いながら、受光量分布中の最大ピークが急峻で、最大受光量が十分な強度になるように各感度パラメータを調整する。さらに、検出処理が開始された後も、毎回の受光量分布中の最大ピークのゆらぎに応じて感度パラメータを調整する。
【0036】
なお、この実施例では、投光部101の投光期間と受光部102の受光期間とを一致させて、これらの期間の長さを露光時間とするが、各期間は必ずしも一致させる必要はない。たとえば投光期間を受光期間より早く開始し、受光期間を投光期間より遅く終了しても良い。その場合には、投光期間が開始されてから受光期間が終了するまでの時間長さが露光時間となる。
【0037】
検出処理中の感度の調整は、原則として露光時間の調整により行われる。具体的には、受光量分布中の最大受光量を指標として、最大受光量が減少した場合には、その減少率に応じて露光時間を長くし、最大受光量が上昇した場合には、その上昇率に応じて露光時間を短くする。ただし、露光時間はワークWの検出が可能な範囲で調整する必要があるので、露光時間を調整可能な範囲の下限値にしても最大受光量が飽和する場合には、投光強度や受光ゲインを下げ、露光時間を調整可能範囲の上限値にしても、最大受光量が十分な強度にならない場合には、投光強度や受光ゲインを上げる。
【0038】
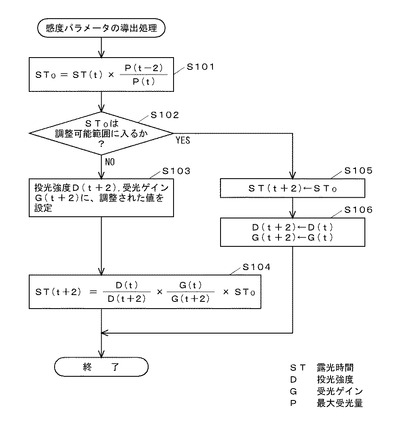
図3は、感度調整のための3種類のパラメータを導出する場合の具体的な処理の手順を示す。この処理は、後記する検出処理に組み込まれて、サイクル毎に実施される。また、この実施例では、現在の処理サイクルで検出した最大受光量P(t)と、2段階前の処理サイクル(前々回の処理)で検出した最大受光量P(t−2)とを比較して感度を調整し、その調整の結果を、2段階後の検出処理に適用する。
【0039】
以下、露光時間をST,投光強度をD,受光ゲインをGとして、フローチャートを参照しながら説明する。なお、各感度パラメータに関しては、現在の処理サイクルで適用された値(前々回の処理サイクルで求めた値)をST(t),D(t),G(t)とし、2段階後の処理サイクルに適用される値をST(t+2),D(t+2),G(t+2)とする。
【0040】
まずステップS101において、CPU10は、2サイクル前の最大受光量P(t−2)を現時点での最大受光量P(t)により除算した値P(t−2)/P(t)を、現在の処理サイクルに適用された露光時間ST(t)に掛ける演算を実行する。この演算により導出された値ST0を、以下、「仮の露光時間ST0」という。
【0041】
次のステップS102において、CPU10は、仮の露光時間ST0が、あらかじめ定められた調整可能範囲に入るか否かをチェックする。ST0が調整可能範囲に入る場合(ステップS102が「YES」)には、このST0を2サイクル先の露光時間ST(t+2)にセットする(ステップS105)。さらに、2サイクル先の投光強度D(t+2)および受光ゲインG(t+2)に、それぞれD(t),G(t)をセットする(ステップS106)。これらの処理により、露光時間はピーク受光量の増減の割合に応じて調整されるが、投光強度や受光ゲインの値は2サイクル前と同じ値に設定される。
【0042】
一方、仮の露光時間ST0が調整可能範囲より大きい場合または小さい場合(ステップS102が「YES」)には、CPU10は、その逸脱の度合いに応じて投光強度D(t)や受光ゲインG(t)を増加または減少し、変更後の値を2サイクル先の投光強度D(t+2)および受光ゲインG(t+2)にセットする(ステップS103)。
【0043】
さらに、CPU10は、仮の露光時間ST0に、D(t)/D(t+2)およびG(t)/G(t+2)を乗算する演算を行い、導出された値を、2サイクル先の露光時間ST(t+2)にセットする(ステップS104)。
【0044】
最大受光量が大幅に上昇したときのステップS101によって、仮の露光時間ST0が調整可能範囲より小さくなった場合には、ステップS103では、投光強度D(t+2)や受光ゲインG(t+2)をD(t),G(t)より小さくする調整が行われる。この結果を受けて行われたステップS104の演算によれば、ST(t+2)>ST0となる。
また、最大受光量が大幅に低下したときのステップS101によって、仮の露光時間ST0が調整可能範囲より大きくなった場合には、ステップS103では、投光強度D(t+2)や受光ゲインG(t+2)をD(t),G(t)より大きくする調整が行われる。この結果を受けて行われたステップS104の演算によれば、ST(t+2)<ST0となる。
【0045】
なお、図示を省略しているが、ステップS104で求めた露光時間ST(t+2)が、調整可能範囲に入らない場合には、投光強度D(t+2)や受光ゲインG(t+2)の値を調整し直して、露光時間ST(t+2)を求める演算を再実行する。
【0046】
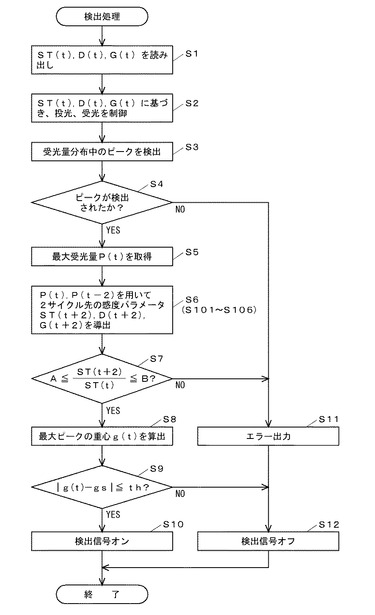
つぎに図4を参照して、1サイクル分の検出処理の手順を説明する。
ステップS1で、CPU10は、本サイクルに適用される感度パラメータST(t),D(t),G(t)をメモリ16から読み出し、これらのパラメータにより調整された感度の下で投光部101および受光部102を動作させる(ステップS1,S2)。
【0047】
つぎに、CPU10は、撮像素子12により生成された反射光像を入力し、この反射光像が示す受光量分布の中から、あらかじめ定めた値以上の振幅(ごく小さな振幅とする。)を持つピークを検出する(ステップS3)。ピークが検出されると(ステップS4が「YES」)、検出されたピークのうちの最大のピークを対象として、そのピーク部分の最大受光量P(t)を取得する(ステップS5)。
【0048】
ステップS6は、先の図3に示した処理(ステップS101〜S106)をまとめたものである。この処理により、ステップS5で取得した最大受光量P(t)や2サイクル前の最大受光量P(t−2)に基づき、2サイクル先の各感度パラメータST(t+2),D(t+2),G(t+2)が導出される。
【0049】
ステップS7では、上記の処理により求めた2サイクル後の露光時間ST(t+2)と現在の処理サイクルでの露光時間ST(t)との比率を求め、この比率をあらかじめ定めた下限値Aおよび上限値Bと比較する。この比率が下限値Aから上限値Bまでの範囲に含まれる場合(ステップS7が「YES」)には、CPU10は、最大受光量P(t)の出現位置を含む最大ピークの重心の座標g(t)を算出する(ステップS8)。
【0050】
さらにCPU10は、上記の重心の座標g(t)と基準位置を示す座標gsとの差を求め、その差の絶対値をあらかじめ登録されたしきい値thと比較する(ステップS9)。この差の絶対値が所定のしきい値th以内であれば(ステップS9が「YES」)、検出信号は「ワークあり」を示すオンに設定される(ステップS10)。一方、g(t)とgsとの間にしきい値thを上回る差が生じている場合(ステップS9が「NO」)には、検出信号は「ワークなし」を示すオフに設定される(ステップS12)。
【0051】
何らかの原因で投光部101からの光に対する反射光を受光できなかった場合には、ステップS3の処理でピークが検出されないため、ステップS4の判定が「NO」となる。また、最大受光量P(t)に基づいて調整された露光時間ST(t+2)が調整前の値ST(t)のB倍より大きいか、ST(t+2)がST(t)のA倍より小さくなった場合には、ステップS7の判定が「NO」となる。
これらの「NO」判定に対しては、エラー出力を行い(ステップS11)、さらに検出信号をオフにする(ステップS12)。
【0052】
上記のとおり、この実施例では、2サイクル前に対する最大受光量の変化に基づいて2サイクル先の感度パラメータを導出すると共に、現在の露光時間ST(t)に対する2サイクル先の露光時間ST(t+2)の変化の度合いが許容範囲に入るか否かを判別した。ただし、この処理方法は、検出処理のサイクルが比較的短い場合でも、検出処理や感度調整を安定して実行するためであって、CPU10の演算速度が対応できるのであれば、直前のサイクルに対する最大受光量の変化に基づいて次のサイクルの感度パラメータを導出し、現在の露光時間ST(t)に対する次のサイクルでの露光時間ST(t+1)の変化の度合いが許容範囲に入るか否かを判別してもよい。
【0053】
先に述べたように、この実施例では、ワークWを安定して検出するために、受光量分布中の最大ピークを最適な強度に調整してから検出を開始するので、検出処理において生じる受光量の最大ピークが検出対象位置にあるワークからの反射光によるピークであれば、最大受光量P(t)とP(t−2)との間に極端に大きな差が生じるとは考えにくい。P(t),P(t−2)から導出される露光時間ST(t+2)とST(t)との間にも、大きな差は生じないと思われる。
【0054】
しかし、ワークWからの反射光が入光せずに、ノイズ光が入光した場合には、最大ピークに大きな変化が生じる可能性が高くなる。たとえば、先に述べた図6の例の場合には、センサ1の主要な光路から離れて進行した弱い光が複数の場所で反射してセンサ1に戻るため、そのノイズ光によるピークはかなり低くなる。この低いピークによる受光量を最大受光量P(t)として導出される露光時間ST(t+2)は、ST(t)よりも大幅に長くなる可能性が高い。また図7の例では、強度の高い正反射光が入光して最大ピークが飽和する可能性があるから、その最大ピークによる受光量を最大受光量P(t)として導出される露光時間ST(t+2)は、ST(t)に対して大幅に短縮される可能性が高い。
【0055】
よって、ワークWの検出に誤りが生じていない場合に生じ得る露光時間のばらつきに基づいて上記の下限値Aおよび上限値Bを定めてメモリ16に登録して、図3および図4に示した処理を実行すれば、ノイズ光による最大ピークが基準位置の付近に生じたとしても、その最大ピークに基づき調整された露光時間ST(t+2)がST(t)に対して大きな変化を示すため、検出信号がオン状態になるのを防ぐことができる。
【0056】
露光時間の変化の度合いの許容範囲は、センサの使用状況、ワークの反射率、ノイズ光の発生要因となる部材の材質などによって変わるので、この実施例のセンサでは、操作部18よりA,Bの値を手入力して検出テストを実施し、このテストモード中にA,Bの値を確定する操作が行われたことに応じて、その時点でのA,Bをメモリ16に登録するようにしている。この機能によれば、たとえば、センサ1を現場に導入したときに、A,Bの値を種々に変更しながら検出テストを実施し、検出エラーが生じない状態になったとききのA,Bの値を確定して登録することができる。
【0057】
なお、図5に示したアプリケーションに関して、発明者らが、検出対象位置にあるワークWからの光による受光量とノイズ光による受光量との比較に基づき、露光時間の変化の度合いの許容範囲を調整しつつ試験的な検出処理を行って確認したところ、下限値Aを1/10とし、上限値Bを10に設定することによって、誤検出が生じない状態にすることができた。この確認結果に基づき、A=1/α、B=αとして、A,Bに代えてαの値を入力してもよい。
下限値Aおよび上限値B、またはαの値を特定する処理は、たとえば、検出処理前にセンサの感度を調整する処理が行われた際に行われ、特定された値がメモリ16に登録される。
【0058】
上記の設定値の入力手段は、操作部18に限定されるものではない。たとえば、図1に示した入出力インターフェース19を介してパーソナルコンピュータなどの外部機器を接続し、この外部機器からA,Bの設定値またはαの設定値を入力してもよい。この場合には、検出テスト中のセンサの検出信号を外部機器に入力して、検出エラーの有無を確認しながら、入力値を変更することも可能である。
【0059】
上記のようにA,Bの値を手入力する方法に代えて、誤検出が生じないように管理された環境下でティーチングを行ってもよい。たとえば、検出対象位置にワークWがある場合の受光量のピークが適切な値になるように各種感度パラメータを調整し、その調整後の露光時間を中心とする所定幅の範囲を許容範囲として、露光時間の変化の度合いの下限値Bおよび上限値Aを割り出してもよい。
【0060】
また、移動するワークWを検出する場合には、感度の調整後に、ワークを移動させて検出テストを行い、その間に生じた露光時間のばらつきに基づいてA,Bの値を決めてもよい。このようにすれば、検出対象位置にワークWがある場合の露光時間だけでなく、ワークWの支持面などからの光の入射に伴う露光時間の変化も計測して、各計測値のばらつきに基づいてA,Bの値を決めることができる。また、ワークWに段差や反射率が異なる箇所がある場合には、1つのワークWが検出対象位置を通過する間に複数回の計測が行われるようにして、各計測値のばらつきを考慮してA,Bの値を決めてもよい。
【0061】
複数種のワークを検出対象とする場合には、ワークの種毎に、いずれかの方法により露光時間の下限値Aおよび上限値Bを定め、A,Bの組み合わせをワークの識別情報に紐付けてメモリ15に登録しておくとよい。このようにすれば、検出対象のワークが変更される場合には、ユーザは、該当するワークの識別情報を選択することにより、A,Bの実際の値を意識することなく、対象のワークの検出に適した状態を設定することができる。
【0062】
上記の実施例では、最大受光量の増減に応じて調整される露光時間の変化の度合いが許容範囲に入るか否かと、ワークWとセンサヘッド100との距離が基準距離に適合するか否かを、ワークWを検出する上での判定条件としたが、露光時間の変化の度合いに代えて、最大受光量の変化の度合いが許容範囲に入るか否かを判別してもよい。また、受光量による判別を行う場合には、撮像素子12とは別の受光素子を設け、この受光素子により計測された受光量を用いた判別処理を行ってもよい。
【0063】
露光時間や受光量の変化の度合いを判別しながらワークWの有無を検出する機能は、必ずしも常時有効にする必要はない。たとえば、操作部18により当該機能の有効と無効とを切り替える操作を受け付けて、無効にする操作が行われた場合には、図4のステップS7の判定を行うことなく、受光量の最大ピークの位置(重心g(t))と基準位置(gs)とを比較した結果のみに基づき、検出信号のオン/オフを制御してもよい。この切り替えは、操作部18による操作に応じて行うものに限らず、外部機器からの切替信号の入力に応じて行ってもよい。
【0064】
また、通常は、上記の機能を無効にしておき、検出エラーの発生回数が許容値を超えたことなど、あらかじめ定めた条件が成立した場合に、上記機能を有効にしてもよい。また、時間帯によってノイズ光が入射する可能性がある場合(窓から差し込む日光など)には、内部のタイマに基づき、一定時間毎に、または定められた時刻になったときに、上記の機能を有効にし、さらに所定時間が経過したら、再び、機能を無効にしてもよい。
【0065】
また、上記実施例のセンサ1は、三角測距の原理を応用したものであるが、センサの種類はこれに限らず、投光から受光までの時間の長さを用いるTOF(Time of Fright)方式を適用したセンサ、投光した光と受光した反射光との位相差を利用する位相差測距方式を適用したセンサ、PN符号により強度変調を施した光を投光し、その光と反射光との相関演算結果を用いた計測を行うPNコード式測距方式を適用したセンサなどを利用してもよい。これらのセンサにおいても、演算処理に使用される受光量の変化の度合い、または露光時間などの感度パラメータの変化の度合いが許容範囲に入るかどうかを判別し、許容範囲に入ると判断された場合に演算を実行することにより、ノイズ光の影響を受けることなく、検出対象物を精度良く検出することが可能になる。
【符号の説明】
【0066】
1 光学式センサ
101 投光部
102 受光部
10 CPU
11 発光素子(レーザダイオード)
12 撮像素子(CMOS)
16 メモリ
18 操作部
【技術分野】
【0001】
本発明は、検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、受光部の受光状態に基づき物体を検出する検出部とを備える光学式センサに関する。特に本発明は、センサからあらかじめ定めた基準の距離を隔てた位置にある物体を検出する目的に使用される光学式センサに関する。
【背景技術】
【0002】
物体検出用の光学式センサは、一般に、投光部から出射した光に対して受光部が受光した反射光の強度を計測し、その計測により得た計測値をしきい値と比較する方法により物体の有無を検出する。しかし、より精度の高い検出を行いたい場合には、受光状態に基づき物体の変位を計測する機能を具備するセンサが用いられる。
【0003】
変位の計測機能を具備する光学式センサを用いた物体検出処理に関して、特許文献1には、少なくとも一方向に配列された複数の受光素子によって、投光部からの光に対する物体からの反射光を受光し、各受光素子における受光量分布の中のピークの位置をあらかじめ定めた基準位置と照合することにより、物体の有無を判別することが記載されている。また、この特許文献1には、受光量分布から複数のピークが検出されたことをもって、多重反射が生じていると判別することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−221491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
反射光の受光状態に基づいて物体の位置を検出するには、検出対象の物体で反射した光のみが受光部に導かれるのが望ましいが、センサの使用状態や周囲の環境によって、検出対象物以外の構造物からの光が受光部に入射し、誤検出が生じるおそれがある。その例を、以下、図5〜7を参照して説明する。
【0006】
図5は、特許文献1に記載されているのと同種のセンサを利用したアプリケーションの例を示す。このアプリケーションでは、パレット20に搭載され、かつ2列に配列されて下方に移動する板状のワークWを所定の高さ位置で検出することを目的とするもので、各列の検出対象位置の側方にそれぞれセンサ1,1が配備されている。各センサ1は、検出対象位置に到達したワークWの端面からの反射光を受光して、受光量分布中のピークの位置を検出し、その検出位置が登録されている基準位置に適合することを確認して「ワークあり」の検出信号を出力する。
【0007】
図6および図7は、上記のアプリケーションにおいて生じる誤検出の例を示す。図6の例では、図中の右側の列でワークWの欠落が生じ、センサ1から斜め上方向に進行した光が欠落箇所の上方のパレット20、隣の列のワークW,欠落箇所の下方のワークWなどに反射した後に、これらの反射を経た光(迷光)がセンサ1に入光している。
【0008】
図7の例では、ワークWは一列に配列され、このワークWの列を挟んでセンサ1に対向する位置に、鏡面反射性の高い部材(鏡体)30が置かれている。この例では、ワークWの配列に欠落が生じ、センサ1から出てワークWの欠落箇所を通過した光が鏡体30の表面で正反射し、その正反射光がセンサ1に入光している。
【0009】
なお、図6,図7の例では、ワークWの配列に欠落が出た場合を想定しているが、ワークWが欠落していない場合でも、検出対象位置にワークWが到達していない状態下で同様のノイズ光がセンサに入光する可能性がある。また、周囲で突発的に発生した光がセンサに入射する場合もある。検出の場所が窓に近い場合には、時間帯によっては窓から差し込んだ日光がセンサに入射する可能性もある。
【0010】
これらのノイズ光がセンサ1に入光する場合でも、受光量分布中のピークが基準位置から十分に離れていれば、誤検出が生じるおそれはない。しかし、ノイズ光によるピークが基準位置の付近に生じた場合には、そのピークが検出対象位置のワークWに相当するものとして誤検出されるおそれがある。
【0011】
特許文献1にも、図5〜7の例に類似するアプリケーションが示されているが、このアプリケーションでは、受光量分布から複数のピークが生じた場合に、それらのピークは多重反射を反映したものであり、ワークの端面は検出されていないと判断する(特許文献1の段落0073〜0074,図19を参照。)。しかし、このような処理では、複数のピークが生じることなく、ノイズ光が基準位置付近に入射した場合には、誤検出が生じてしまう。
【0012】
本発明は上記の問題に着目し、ノイズ光の入射により、検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、そのような誤った判断がされることなく、精度の良い検出ができるようにすることを課題とする。
【課題を解決するための手段】
【0013】
本発明は、検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、受光部の受光状態に基づき物体を検出する検出部とを具備する光学式センサに適用される。本発明による検出部は、受光部の受光状態に基づき、投光部からの光を反射した物体とセンサとの間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータの変化の度合いまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段と、第1の判別手段により物体との距離が基準距離に適合すると判別され、かつ第2の判別手段により判別対象のパラメータの変化の度合いが許容範囲に入っていると判別されたことを条件として、物体を検出したことを示す検出信号を出力する検出手段とを具備する。
【0014】
この種のセンサにおいては、一般に、検出を開始するに先立ち、検出対象位置にある検出対象物からの反射光を検出に適した強度で受光できるように感度を調整し、検出動作中も、適宜、受光量に基づいて感度を調整する。したがって、図5の例のように、規格化されたワークWを検出対象として、検出対象位置に到達するワークWを検出する場合に、ワークWからの反射光を正しく受光する状態が続いている間の受光量が大きく変化するとは考えにくい。
【0015】
一方、図6の例のように、様々な場所を廻ってセンサに入るノイズ光は、検出対象位置にあるワークWからの反射光より弱い光になると考えられる。また、図7の例のような鏡体300からの正反射光は、検出対象位置にあるワークWからの反射光よりも強い光になると考えられる。
【0016】
このように、検出対象位置にあるワークからの反射光の強度とノイズ光の強度との間には、大きな差が生じる可能性が高い。この点に着目して、本発明では、受光状態に基づき判別された物体とセンサとの間の距離が基準距離に適合することと、受光量を表すパラメータ(たとえば、一次元に配列された受光素子により得た受光量分布のピークの値)の変化の度合い、または受光量の増減に応じて調整される感度パラメータ(たとえば露光時間)の変化の度合いが許容範囲に入っていることとを、物体を検出したことを示す検出信号を出力するための条件とする。そうすると、ノイズ光によって物体が検出対象位置にあると判断され得る受光状態が生じた場合でも、その受光量や受光量に基づき調整される感度に大きな変化が生じるので、第2の判別手段による判別対象のパラメータに許容範囲を超える変化が生じ、物体の検出にかかる条件の1つが満たされない状態となる。これによりノイズ光による誤検出が生じるのを防ぐことができる。
【0017】
上記のセンサの一実施形態は、投光部および受光部の動作期間を決める露光時間の長さを、受光部により得られた受光量の増減に応じて調整する調整手段を備えており、第2の判別手段は露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別する。
基準位置にある検出対象物からの反射光を受光している場合の受光量を検出に適した強度で安定させるには、一般に、受光量が増加した場合には露光時間を短くし、受光量が減少した場合には露光時間を長くする調整が行われる。この調整によれば、ノイズ光を受光すると、受光量が大きく変化するので、露光時間も大きく変化する。よって、受光状態に基づく判別の結果と共に、露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別することによって、ノイズ光の受光による誤検出が生じるのを防ぐことができる。
【0018】
上記のセンサの他の一実施形態では、受光部は、少なくとも一方向に沿って配列される複数の受光素子を具備する。また第1の判別手段は、各受光素子により得られる受光量分布中のピークの位置をあらかじめ定めた基準位置と照合することにより、投光部からの光を反射した物体とセンサとの間の距離が基準距離に適合するか否かを判別する。また第2の判別手段は、受光量分布中のピークの受光量の変化の度合いが許容範囲に含まれるか否かを判別する。
【0019】
この実施形態は、検出対象物からの反射光を反映した受光量のピークを検出している状態からノイズ光を反映した受光量のピークを検出している状態になると、ピークの高さが大きく変化する場合に適用することができる。この実施形態によれば、物体の有無を判別するのに用いられる受光量分布中のピークの変化の度合いをチェックすることにより、ノイズ光の受光による誤検出が生じるのを防ぐことができる。
【0020】
さらに上記のセンサの他の実施形態では、第2の判別手段は、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間内における変化の度合いを、それぞれ許容範囲を表す上限値および下限値と比較するように設定される。さらに、この実施形態のセンサは、上限値および下限値を設定するためのデータを入力する入力手段と、入力されたデータに基づく上限値および下限値を第2の判別手段に設定する設定手段とを具備する。
【0021】
基準位置にある検出対象物からの反射光を受光している場合に生じる受光量の変動範囲は、検出対象物の材質、センサと基準位置との間の距離など、センサの使用環境上の様々な要素に応じて変動する。上記の実施形態では、第2の判別手段が使用する許容範囲を決める上限値および下限値を、入力に応じて設定することができるので、センサの利便性や汎用性を高めることができる。
【0022】
他の実施形態によるセンサには、第2の判別手段の判別に用いられる許容範囲を表すパラメータとして、当該許容範囲の上限値αが登録される登録手段が設けられる。第2の判別手段は、上限値αの逆数1/αを許容範囲の下限値として、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いが、1/αからαまでの範囲に入るか否かを判別する。αの値は、1つ前の実施形態と同様に入力手段より入力してもよいし、検出対象物のモデルを用いた検出テストなどに基づき特定してもよい。
【0023】
他の実施形態によるセンサは、第2の判別手段の機能を有効にする設定と無効にする設定とを切り替える切替手段をさらに具備する。また、この実施形態の検出手段は、第2の判別手段の機能が無効に設定されている場合には、第1の判別手段により物体との距離が基準距離に適合すると判別されたことのみを条件として、物体を検出したことを示す検出信号を出力する。
【0024】
上記の実施形態によれば、ノイズ光による誤検出が生じる可能性のない現場においては、第2の判別手段の機能を無効にすることによって、第1の判別手段による判別結果のみに基づく検出を行うことができる。
切替手段による有効と無効との切り替えは、センサに設けられた操作部における切替操作に応じて行ってもよいし、外部機器からの入力に応じて行ってもよい。または、内部のタイマがあらかじめ定めた時間を示したとき、検出エラーの回数が所定の値に達したときなど、あらかじめ定められた条件が成立したことを契機として切り替えを行うようにしてもよい。
【発明の効果】
【0025】
本発明によれば、基準位置にある検出対象物からの反射光とは異なるノイズ光が受光部に入射した場合でも、そのノイズ光によって物体を検出したという誤検出が生じるのを防ぐことができる。これにより基準の位置にある物体を精度良く検出することが可能になる。
【図面の簡単な説明】
【0026】
【図1】光学式センサの構成例を示すブロック図である。
【図2】センサの使用例と検出の原理とを示す模式図である。
【図3】感度パラメータの導出処理に関するフローチャートである。
【図4】検出処理に関するフローチャートである。
【図5】光学式センサの導入例を示す図である。
【図6】ノイズ光が生じる例を示す図である。
【図7】ノイズ光が生じる例を示す図である。
【発明を実施するための形態】
【0027】
図1は、本発明が適用される光学式センサの電気構成を示す。
この実施例のセンサ1は、発光素子(レーザダイオード)11を含む投光部101や、一次元の撮像素子(CMOS)12を含む受光部102を有する。投光部101には、発光素子11のほか、投光制御回路13が含まれる。受光部102には、撮像素子12のほか、この撮像素子12により生成された画像信号を処理するための信号処理回路14やA/D変換回路15が設けられる。
【0028】
このほか、センサ1には、CPU10,メモリ16,表示部17,操作部18,入出力インターフェース19などが設けられる。投光部101および受光部102は、図2に示すセンサヘッド100に収容され、その他の構成は、「アンプ部」と呼ばれる補助筐体(図示せず。)に設けられる。ただし、センサの構成はこれに限らず、たとえば、全ての構成を1つの筐体に配備することも可能である。
【0029】
CPU10は、メモリ16に格納されたプログラムに基づき検出処理や感度調整に関わる処理を実行する。検出結果は、表示部17に表示されるほか、入出力インターフェース19を介して外部に出力される。操作部18は、検出処理に先立つ種々の設定を行う場合に用いられる。
【0030】
図2は、センサヘッド100の構成および検出動作の原理を模式的に示す。
センサヘッド100は、発光素子11の光軸をワークWの経路Lの検出対象位置に合わせた状態にして配備される。
発光素子11から出射されたレーザ光は、投光レンズ111を介して出射された後に検出対象の物体で反射し、受光用レンズ122を介して撮像素子12に入射する。よって、撮像素子12により生成される反射光像が示す受光量分布には、反射光の入射位置に対応する箇所にピークが現れる。また検査対象位置にワークWがある場合とない場合とでは、撮像素子12における反射光の入射位置が異なるので、受光量分布中のピークの位置に基づき物体の位置を判断することができる。
【0031】
上記の原理を利用して、この実施例では、設定モードにおいて、ワークWを検出対象位置に配置した状態で投光および受光を行って、受光量分布に現れた最大ピークの重心の座標を基準位置として登録する。投光処理が開始されると、投光動作および受光動作を繰り返しながら、毎回の受光量分布中の最大ピークの重心の座標を検出し、その座標を基準位置と照合することによって、検出対象位置に到達したワークWを検出する。また、図5に示したように、上下動するワークWを所定の高さ位置で検出したい場合には、ワークWの経路の側方にセンサヘッド100を配備して、ワークWの端面を検出する方法をとることができる。
【0032】
いずれの検出例においても、検出対象位置にあるワークWからの反射光により受光量分布に生じるピークの位置を基準位置として登録することは、間接的に、検出対象位置にあるワークWとセンサヘッド100との距離(基準距離)を登録していることになると考えられる。また検出処理において、受光量分布中の最大ピークの重心の座標を基準位置と照合することは、投光部101からの光を反射した物体(図2の例ではワークWまたは経路Lの表面)とセンサヘッド100との距離が基準距離に適合するか否かを判別する処理に相当する。この判別処理によれば、たとえば図2の例においては、検出対象のワークWとは異なる高さの物体が検出対象位置に到達しても、その物体によって「ワークあり」を示す検出信号が出力されるのを防ぐことができる。
【0033】
しかしながら、受光量パターン中の基準位置の付近に現れるピークの全てが検出対象のワークWからの反射光によるものとは限らず、ノイズ光が基準位置の付近に入射したことにより生じる場合もある。
【0034】
この点に鑑み、この実施例では、受光量分布パターン中の最大ピークの位置を検出するより前に、この最大ピークが示す最大の受光量の増減に追随して調整される露光時間の変化の度合いをチェックし、この変化の度合いが許容範囲内に入り、かつ受光量分布中の最大ピークの位置が登録された基準位置に適合することを条件として、「ワークあり」を示す検出信号を出力する。
【0035】
ここで、この実施例で実施される感度調整について説明する。
この実施例では、露光時間、投光されるレーザ光の強度(以下、「投光強度」という。)、受光量信号の増幅率(以下、「受光ゲイン」という。)の3種類のパラメータを調整することによって感度を調整する。また、基準位置の登録処理より先に、ワークWを検出対象位置に配置した状態で前述した投光および受光を行いながら、受光量分布中の最大ピークが急峻で、最大受光量が十分な強度になるように各感度パラメータを調整する。さらに、検出処理が開始された後も、毎回の受光量分布中の最大ピークのゆらぎに応じて感度パラメータを調整する。
【0036】
なお、この実施例では、投光部101の投光期間と受光部102の受光期間とを一致させて、これらの期間の長さを露光時間とするが、各期間は必ずしも一致させる必要はない。たとえば投光期間を受光期間より早く開始し、受光期間を投光期間より遅く終了しても良い。その場合には、投光期間が開始されてから受光期間が終了するまでの時間長さが露光時間となる。
【0037】
検出処理中の感度の調整は、原則として露光時間の調整により行われる。具体的には、受光量分布中の最大受光量を指標として、最大受光量が減少した場合には、その減少率に応じて露光時間を長くし、最大受光量が上昇した場合には、その上昇率に応じて露光時間を短くする。ただし、露光時間はワークWの検出が可能な範囲で調整する必要があるので、露光時間を調整可能な範囲の下限値にしても最大受光量が飽和する場合には、投光強度や受光ゲインを下げ、露光時間を調整可能範囲の上限値にしても、最大受光量が十分な強度にならない場合には、投光強度や受光ゲインを上げる。
【0038】
図3は、感度調整のための3種類のパラメータを導出する場合の具体的な処理の手順を示す。この処理は、後記する検出処理に組み込まれて、サイクル毎に実施される。また、この実施例では、現在の処理サイクルで検出した最大受光量P(t)と、2段階前の処理サイクル(前々回の処理)で検出した最大受光量P(t−2)とを比較して感度を調整し、その調整の結果を、2段階後の検出処理に適用する。
【0039】
以下、露光時間をST,投光強度をD,受光ゲインをGとして、フローチャートを参照しながら説明する。なお、各感度パラメータに関しては、現在の処理サイクルで適用された値(前々回の処理サイクルで求めた値)をST(t),D(t),G(t)とし、2段階後の処理サイクルに適用される値をST(t+2),D(t+2),G(t+2)とする。
【0040】
まずステップS101において、CPU10は、2サイクル前の最大受光量P(t−2)を現時点での最大受光量P(t)により除算した値P(t−2)/P(t)を、現在の処理サイクルに適用された露光時間ST(t)に掛ける演算を実行する。この演算により導出された値ST0を、以下、「仮の露光時間ST0」という。
【0041】
次のステップS102において、CPU10は、仮の露光時間ST0が、あらかじめ定められた調整可能範囲に入るか否かをチェックする。ST0が調整可能範囲に入る場合(ステップS102が「YES」)には、このST0を2サイクル先の露光時間ST(t+2)にセットする(ステップS105)。さらに、2サイクル先の投光強度D(t+2)および受光ゲインG(t+2)に、それぞれD(t),G(t)をセットする(ステップS106)。これらの処理により、露光時間はピーク受光量の増減の割合に応じて調整されるが、投光強度や受光ゲインの値は2サイクル前と同じ値に設定される。
【0042】
一方、仮の露光時間ST0が調整可能範囲より大きい場合または小さい場合(ステップS102が「YES」)には、CPU10は、その逸脱の度合いに応じて投光強度D(t)や受光ゲインG(t)を増加または減少し、変更後の値を2サイクル先の投光強度D(t+2)および受光ゲインG(t+2)にセットする(ステップS103)。
【0043】
さらに、CPU10は、仮の露光時間ST0に、D(t)/D(t+2)およびG(t)/G(t+2)を乗算する演算を行い、導出された値を、2サイクル先の露光時間ST(t+2)にセットする(ステップS104)。
【0044】
最大受光量が大幅に上昇したときのステップS101によって、仮の露光時間ST0が調整可能範囲より小さくなった場合には、ステップS103では、投光強度D(t+2)や受光ゲインG(t+2)をD(t),G(t)より小さくする調整が行われる。この結果を受けて行われたステップS104の演算によれば、ST(t+2)>ST0となる。
また、最大受光量が大幅に低下したときのステップS101によって、仮の露光時間ST0が調整可能範囲より大きくなった場合には、ステップS103では、投光強度D(t+2)や受光ゲインG(t+2)をD(t),G(t)より大きくする調整が行われる。この結果を受けて行われたステップS104の演算によれば、ST(t+2)<ST0となる。
【0045】
なお、図示を省略しているが、ステップS104で求めた露光時間ST(t+2)が、調整可能範囲に入らない場合には、投光強度D(t+2)や受光ゲインG(t+2)の値を調整し直して、露光時間ST(t+2)を求める演算を再実行する。
【0046】
つぎに図4を参照して、1サイクル分の検出処理の手順を説明する。
ステップS1で、CPU10は、本サイクルに適用される感度パラメータST(t),D(t),G(t)をメモリ16から読み出し、これらのパラメータにより調整された感度の下で投光部101および受光部102を動作させる(ステップS1,S2)。
【0047】
つぎに、CPU10は、撮像素子12により生成された反射光像を入力し、この反射光像が示す受光量分布の中から、あらかじめ定めた値以上の振幅(ごく小さな振幅とする。)を持つピークを検出する(ステップS3)。ピークが検出されると(ステップS4が「YES」)、検出されたピークのうちの最大のピークを対象として、そのピーク部分の最大受光量P(t)を取得する(ステップS5)。
【0048】
ステップS6は、先の図3に示した処理(ステップS101〜S106)をまとめたものである。この処理により、ステップS5で取得した最大受光量P(t)や2サイクル前の最大受光量P(t−2)に基づき、2サイクル先の各感度パラメータST(t+2),D(t+2),G(t+2)が導出される。
【0049】
ステップS7では、上記の処理により求めた2サイクル後の露光時間ST(t+2)と現在の処理サイクルでの露光時間ST(t)との比率を求め、この比率をあらかじめ定めた下限値Aおよび上限値Bと比較する。この比率が下限値Aから上限値Bまでの範囲に含まれる場合(ステップS7が「YES」)には、CPU10は、最大受光量P(t)の出現位置を含む最大ピークの重心の座標g(t)を算出する(ステップS8)。
【0050】
さらにCPU10は、上記の重心の座標g(t)と基準位置を示す座標gsとの差を求め、その差の絶対値をあらかじめ登録されたしきい値thと比較する(ステップS9)。この差の絶対値が所定のしきい値th以内であれば(ステップS9が「YES」)、検出信号は「ワークあり」を示すオンに設定される(ステップS10)。一方、g(t)とgsとの間にしきい値thを上回る差が生じている場合(ステップS9が「NO」)には、検出信号は「ワークなし」を示すオフに設定される(ステップS12)。
【0051】
何らかの原因で投光部101からの光に対する反射光を受光できなかった場合には、ステップS3の処理でピークが検出されないため、ステップS4の判定が「NO」となる。また、最大受光量P(t)に基づいて調整された露光時間ST(t+2)が調整前の値ST(t)のB倍より大きいか、ST(t+2)がST(t)のA倍より小さくなった場合には、ステップS7の判定が「NO」となる。
これらの「NO」判定に対しては、エラー出力を行い(ステップS11)、さらに検出信号をオフにする(ステップS12)。
【0052】
上記のとおり、この実施例では、2サイクル前に対する最大受光量の変化に基づいて2サイクル先の感度パラメータを導出すると共に、現在の露光時間ST(t)に対する2サイクル先の露光時間ST(t+2)の変化の度合いが許容範囲に入るか否かを判別した。ただし、この処理方法は、検出処理のサイクルが比較的短い場合でも、検出処理や感度調整を安定して実行するためであって、CPU10の演算速度が対応できるのであれば、直前のサイクルに対する最大受光量の変化に基づいて次のサイクルの感度パラメータを導出し、現在の露光時間ST(t)に対する次のサイクルでの露光時間ST(t+1)の変化の度合いが許容範囲に入るか否かを判別してもよい。
【0053】
先に述べたように、この実施例では、ワークWを安定して検出するために、受光量分布中の最大ピークを最適な強度に調整してから検出を開始するので、検出処理において生じる受光量の最大ピークが検出対象位置にあるワークからの反射光によるピークであれば、最大受光量P(t)とP(t−2)との間に極端に大きな差が生じるとは考えにくい。P(t),P(t−2)から導出される露光時間ST(t+2)とST(t)との間にも、大きな差は生じないと思われる。
【0054】
しかし、ワークWからの反射光が入光せずに、ノイズ光が入光した場合には、最大ピークに大きな変化が生じる可能性が高くなる。たとえば、先に述べた図6の例の場合には、センサ1の主要な光路から離れて進行した弱い光が複数の場所で反射してセンサ1に戻るため、そのノイズ光によるピークはかなり低くなる。この低いピークによる受光量を最大受光量P(t)として導出される露光時間ST(t+2)は、ST(t)よりも大幅に長くなる可能性が高い。また図7の例では、強度の高い正反射光が入光して最大ピークが飽和する可能性があるから、その最大ピークによる受光量を最大受光量P(t)として導出される露光時間ST(t+2)は、ST(t)に対して大幅に短縮される可能性が高い。
【0055】
よって、ワークWの検出に誤りが生じていない場合に生じ得る露光時間のばらつきに基づいて上記の下限値Aおよび上限値Bを定めてメモリ16に登録して、図3および図4に示した処理を実行すれば、ノイズ光による最大ピークが基準位置の付近に生じたとしても、その最大ピークに基づき調整された露光時間ST(t+2)がST(t)に対して大きな変化を示すため、検出信号がオン状態になるのを防ぐことができる。
【0056】
露光時間の変化の度合いの許容範囲は、センサの使用状況、ワークの反射率、ノイズ光の発生要因となる部材の材質などによって変わるので、この実施例のセンサでは、操作部18よりA,Bの値を手入力して検出テストを実施し、このテストモード中にA,Bの値を確定する操作が行われたことに応じて、その時点でのA,Bをメモリ16に登録するようにしている。この機能によれば、たとえば、センサ1を現場に導入したときに、A,Bの値を種々に変更しながら検出テストを実施し、検出エラーが生じない状態になったとききのA,Bの値を確定して登録することができる。
【0057】
なお、図5に示したアプリケーションに関して、発明者らが、検出対象位置にあるワークWからの光による受光量とノイズ光による受光量との比較に基づき、露光時間の変化の度合いの許容範囲を調整しつつ試験的な検出処理を行って確認したところ、下限値Aを1/10とし、上限値Bを10に設定することによって、誤検出が生じない状態にすることができた。この確認結果に基づき、A=1/α、B=αとして、A,Bに代えてαの値を入力してもよい。
下限値Aおよび上限値B、またはαの値を特定する処理は、たとえば、検出処理前にセンサの感度を調整する処理が行われた際に行われ、特定された値がメモリ16に登録される。
【0058】
上記の設定値の入力手段は、操作部18に限定されるものではない。たとえば、図1に示した入出力インターフェース19を介してパーソナルコンピュータなどの外部機器を接続し、この外部機器からA,Bの設定値またはαの設定値を入力してもよい。この場合には、検出テスト中のセンサの検出信号を外部機器に入力して、検出エラーの有無を確認しながら、入力値を変更することも可能である。
【0059】
上記のようにA,Bの値を手入力する方法に代えて、誤検出が生じないように管理された環境下でティーチングを行ってもよい。たとえば、検出対象位置にワークWがある場合の受光量のピークが適切な値になるように各種感度パラメータを調整し、その調整後の露光時間を中心とする所定幅の範囲を許容範囲として、露光時間の変化の度合いの下限値Bおよび上限値Aを割り出してもよい。
【0060】
また、移動するワークWを検出する場合には、感度の調整後に、ワークを移動させて検出テストを行い、その間に生じた露光時間のばらつきに基づいてA,Bの値を決めてもよい。このようにすれば、検出対象位置にワークWがある場合の露光時間だけでなく、ワークWの支持面などからの光の入射に伴う露光時間の変化も計測して、各計測値のばらつきに基づいてA,Bの値を決めることができる。また、ワークWに段差や反射率が異なる箇所がある場合には、1つのワークWが検出対象位置を通過する間に複数回の計測が行われるようにして、各計測値のばらつきを考慮してA,Bの値を決めてもよい。
【0061】
複数種のワークを検出対象とする場合には、ワークの種毎に、いずれかの方法により露光時間の下限値Aおよび上限値Bを定め、A,Bの組み合わせをワークの識別情報に紐付けてメモリ15に登録しておくとよい。このようにすれば、検出対象のワークが変更される場合には、ユーザは、該当するワークの識別情報を選択することにより、A,Bの実際の値を意識することなく、対象のワークの検出に適した状態を設定することができる。
【0062】
上記の実施例では、最大受光量の増減に応じて調整される露光時間の変化の度合いが許容範囲に入るか否かと、ワークWとセンサヘッド100との距離が基準距離に適合するか否かを、ワークWを検出する上での判定条件としたが、露光時間の変化の度合いに代えて、最大受光量の変化の度合いが許容範囲に入るか否かを判別してもよい。また、受光量による判別を行う場合には、撮像素子12とは別の受光素子を設け、この受光素子により計測された受光量を用いた判別処理を行ってもよい。
【0063】
露光時間や受光量の変化の度合いを判別しながらワークWの有無を検出する機能は、必ずしも常時有効にする必要はない。たとえば、操作部18により当該機能の有効と無効とを切り替える操作を受け付けて、無効にする操作が行われた場合には、図4のステップS7の判定を行うことなく、受光量の最大ピークの位置(重心g(t))と基準位置(gs)とを比較した結果のみに基づき、検出信号のオン/オフを制御してもよい。この切り替えは、操作部18による操作に応じて行うものに限らず、外部機器からの切替信号の入力に応じて行ってもよい。
【0064】
また、通常は、上記の機能を無効にしておき、検出エラーの発生回数が許容値を超えたことなど、あらかじめ定めた条件が成立した場合に、上記機能を有効にしてもよい。また、時間帯によってノイズ光が入射する可能性がある場合(窓から差し込む日光など)には、内部のタイマに基づき、一定時間毎に、または定められた時刻になったときに、上記の機能を有効にし、さらに所定時間が経過したら、再び、機能を無効にしてもよい。
【0065】
また、上記実施例のセンサ1は、三角測距の原理を応用したものであるが、センサの種類はこれに限らず、投光から受光までの時間の長さを用いるTOF(Time of Fright)方式を適用したセンサ、投光した光と受光した反射光との位相差を利用する位相差測距方式を適用したセンサ、PN符号により強度変調を施した光を投光し、その光と反射光との相関演算結果を用いた計測を行うPNコード式測距方式を適用したセンサなどを利用してもよい。これらのセンサにおいても、演算処理に使用される受光量の変化の度合い、または露光時間などの感度パラメータの変化の度合いが許容範囲に入るかどうかを判別し、許容範囲に入ると判断された場合に演算を実行することにより、ノイズ光の影響を受けることなく、検出対象物を精度良く検出することが可能になる。
【符号の説明】
【0066】
1 光学式センサ
101 投光部
102 受光部
10 CPU
11 発光素子(レーザダイオード)
12 撮像素子(CMOS)
16 メモリ
18 操作部
【特許請求の範囲】
【請求項1】
検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、前記受光部の受光状態に基づき物体を検出する検出部とを具備するセンサであって、
前記検出部は、前記受光部の受光状態に基づき、前記投光部からの光を反射した物体とセンサとの間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータの変化の度合いまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段と、前記第1の判別手段により前記物体との距離が基準距離に適合すると判別され、かつ前記第2の判別手段により判別対象のパラメータの変化の度合いが許容範囲に入っていると判別されたことを条件として、物体を検出したことを示す検出信号を出力する検出手段とを具備する光学式センサ。
【請求項2】
前記投光部および受光部の動作期間を決める露光時間の長さを、前記受光部により得られた受光量の増減に応じて調整する調整手段をさらに備え、
前記第2の判別手段は、露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別する、請求項1に記載された光学式センサ。
【請求項3】
前記受光部は、少なくとも一方向に沿って配列される複数の受光素子を具備し、
前記第1の判別手段は、各受光素子により得られる受光量分布中のピークの位置をあらかじめ定めた基準位置と照合することにより、前記投光部からの光を反射した物体とセンサとの間の距離が前記基準距離に適合するか否かを判別し、
前記第2の判別手段は、前記受光量分布中のピークの受光量の変化の度合いが許容範囲に含まれるか否かを判別する、請求項1に記載された光学式センサ。
【請求項4】
前記第2の判別手段は、前記受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いを、前記許容範囲を表す上限値および下限値と比較することにより、当該パラメータが許容範囲に入るか否かを判別し、
前記上限値および下限値を設定するためのデータを入力する入力手段と、入力されたデータに基づく上限値および下限値を前記第2の判別手段に設定する設定手段とを、さらに具備する請求項1に記載された光学式センサ。
【請求項5】
前記第2の判別手段の判別に用いられる許容範囲を表すパラメータとして、当該許容範囲の上限値αが登録される登録手段がさらに設けられ、
前記第2の判別手段は、前記上限値αの逆数1/αを前記許容範囲の下限値として、前記受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いが、1/αからαまでの範囲に入るか否かを判別する、請求項1に記載された光学式センサ。
【請求項6】
前記第2の判別手段の機能を有効にする設定と無効にする設定とを切り替える切替手段をさらに具備し、
前記検出手段は、前記第2の判別手段の機能が無効に設定されている場合には、前記第1の判別手段により前記物体との距離が基準距離に適合すると判別されたことのみを条件として、物体を検出したことを示す検出信号を出力する、請求項1に記載された光学式センサ。
【請求項1】
検出用の光を投光する投光部と、投光部からの光に対する反射光を受光する受光部と、前記受光部の受光状態に基づき物体を検出する検出部とを具備するセンサであって、
前記検出部は、前記受光部の受光状態に基づき、前記投光部からの光を反射した物体とセンサとの間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータの変化の度合いまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段と、前記第1の判別手段により前記物体との距離が基準距離に適合すると判別され、かつ前記第2の判別手段により判別対象のパラメータの変化の度合いが許容範囲に入っていると判別されたことを条件として、物体を検出したことを示す検出信号を出力する検出手段とを具備する光学式センサ。
【請求項2】
前記投光部および受光部の動作期間を決める露光時間の長さを、前記受光部により得られた受光量の増減に応じて調整する調整手段をさらに備え、
前記第2の判別手段は、露光時間の長さの変化の度合いが許容範囲に含まれるか否かを判別する、請求項1に記載された光学式センサ。
【請求項3】
前記受光部は、少なくとも一方向に沿って配列される複数の受光素子を具備し、
前記第1の判別手段は、各受光素子により得られる受光量分布中のピークの位置をあらかじめ定めた基準位置と照合することにより、前記投光部からの光を反射した物体とセンサとの間の距離が前記基準距離に適合するか否かを判別し、
前記第2の判別手段は、前記受光量分布中のピークの受光量の変化の度合いが許容範囲に含まれるか否かを判別する、請求項1に記載された光学式センサ。
【請求項4】
前記第2の判別手段は、前記受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いを、前記許容範囲を表す上限値および下限値と比較することにより、当該パラメータが許容範囲に入るか否かを判別し、
前記上限値および下限値を設定するためのデータを入力する入力手段と、入力されたデータに基づく上限値および下限値を前記第2の判別手段に設定する設定手段とを、さらに具備する請求項1に記載された光学式センサ。
【請求項5】
前記第2の判別手段の判別に用いられる許容範囲を表すパラメータとして、当該許容範囲の上限値αが登録される登録手段がさらに設けられ、
前記第2の判別手段は、前記上限値αの逆数1/αを前記許容範囲の下限値として、前記受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの一定の時間における変化の度合いが、1/αからαまでの範囲に入るか否かを判別する、請求項1に記載された光学式センサ。
【請求項6】
前記第2の判別手段の機能を有効にする設定と無効にする設定とを切り替える切替手段をさらに具備し、
前記検出手段は、前記第2の判別手段の機能が無効に設定されている場合には、前記第1の判別手段により前記物体との距離が基準距離に適合すると判別されたことのみを条件として、物体を検出したことを示す検出信号を出力する、請求項1に記載された光学式センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−90045(P2013−90045A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226897(P2011−226897)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]