
光学式変位検出機構のスポット光の位置合わせ方法およびそれを用いた走査型プローブ顕微鏡
【課題】 光源からの光を測定対象や光検出器の受光面へ位置合わせを行う際に、位置合わせを容易に、かつ確実に行うことが可能な光学式変位検出機構のスポット光の位置合わせ方法を提供する。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の利得で増幅する増幅器22から構成される光学式変位検出機構において、光検出器16で検出される検出感度を利得(増幅率)調整器を用いて実際に測定対象を測定する時よりも小さい値に設定して、光検出器16の所定の位置に光検出器用位置決め機構18により光のスポット20の位置決めを行うようにした。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の利得で増幅する増幅器22から構成される光学式変位検出機構において、光検出器16で検出される検出感度を利得(増幅率)調整器を用いて実際に測定対象を測定する時よりも小さい値に設定して、光検出器16の所定の位置に光検出器用位置決め機構18により光のスポット20の位置決めを行うようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に、様々な物理情報(例えば、誘電率、磁化状態、透過率、粘弾性や摩擦係数等)を計測する走査型プローブ顕微鏡、表面粗さ計、硬度計や電気化学顕微鏡等の表面情報計測装置等に用いられる、測定対象に光源からの光を照射し、照射後の光の強度を光検出器で検出する光学式変位検出機構のスポット光の位置合わせ方法およびそれを用いた走査型プローブ顕微鏡に関するものである。
【背景技術】
【0002】
金属、半導体、セラミック、樹脂、高分子、生体材料、絶縁物等のサンプルを微小領域にて測定し、試料表面の凹凸像や物性情報の観察等を行う装置として、走査型プローブ顕微鏡(SPM:Scanning Probe Microscope、以後SPMと略記)が知られている。
【0003】
これらSPMでは、サンプルが載置されるサンプルホルダと、先端にプローブを有し、サンプルの表面に近接させるカンチレバーを備えたものが周知となっている。そして、これらサンプルとプローブとをサンプル面内(XY平面)で相対的に走査させ、この走査中にカンチレバーの変位量を変位検出機構により測定しながら、サンプルまたはプローブをサンプル表面と直交する方向(Z方向)に動作させて、サンプルとプローブの距離制御を行うことにより、表面形状や各種物性情報を測定するようになっている。
【0004】
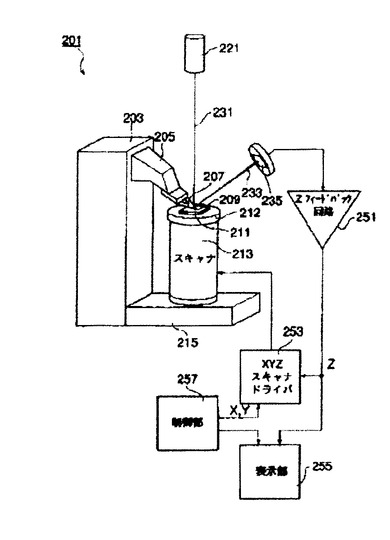
ここで、従来の典型的な光学式変位検出機構を用いたSPMの概略構成図を図5に示す(特許文献1参照)。
【0005】
図5のSPM201は、先端にサンプル211を載せるサンプルステージ212を有し、末端がベース215上に固定された円筒型の圧電素子より構成される3軸微動機構(スキャナ)213によりサンプルがサンプル面内(XY平面)で走査されながら、サンプル面と垂直な方向(Z方向)に微動される。
【0006】
また、先端にプローブ209を有するカンチレバー207が、剛性の高いアーム205を介してベース215に固定された支柱203に保持されている。カンチレバー207の先端部下面には、プローブ209が下方に突出するように形成されており、Z方向に動作可能な粗動機構(図示せず)により、プローブ209の先端をサンプル211表面に近接させる構成である。
【0007】
カンチレバー207上方には、一般に光てこ方式と呼ばれる光学式変位検出機構が設けられている。
【0008】
この光学式変位検出機構は、カンチレバー207の上方に設置され半導体レーザからなる光源221からレーザ光(入射光231)を集光レンズ(図示せず)によりカンチレバー207の背面に集光して照射する。この入射光231は、カンチレバー207の背面で反射し、反射光233がカンチレバー207の斜め上方に設置され半導体により構成された光検出器235に当る。この光検出器235は受光面が上下に2分割され、反射光233の入射位置を検出することができる。
【0009】
ここで、この光てこ方式の光学式変位検出機構の動作原理を詳細に説明する。SPMの測定を行う前に、まず、光源221からの入射光をカンチレバー207の背面に位置決めする。このとき通常は光源221にカンチレバー207の面内で入射光231のスポットが移動可能な2軸の位置決めステージ(図示せず)が設けられており、カンチレバー207の背面とサンプル211上に照射されたスポット光の様子が観察可能な光学顕微鏡(図示せず)の像を見ながら位置合わせが行われる。
【0010】
次に、カンチレバー207の背面で反射された反射光を、光検出器235の受光面内に位置合わせする。光検出器235にも通常は受光面内で移動可能な2軸の位置決めステージ(図示せず)が設けられている。光検出器235は半導体材料より構成されており、受光面に光が当たると電流が発生する。受光面の後ろ側には、電流/電圧変換回路(図示せず)が接続されており、あらかじめ規定された増幅率により、電流信号が電圧信号に変換されて、後述するZフィードバック回路251に電圧信号が入力される。
【0011】
反射光233のスポットを受光面内で位置合わせするためには、まず、2分割された上側の受光面(A)と下側の受光面(B)との光量の和(A+B)が最大となるように、電流/電圧変換回路からの電圧信号を見ながら位置合わせする。この状態では、受光面内の任意の位置に反射光のスポットが位置合わせされた状態である。次に、スポット光が受光面の上下の受光面の中心来るように、さらに精密に位置合わせする。このときには上下の受光面の差(A−B)の電圧信号が概ね0となるように光検出器235にも設けられた位置決め機構を微調する。このように位置合わせすることで、スポット光の照射位置を上下の受光面の中心に精密に位置合わせすることが可能となる。
【0012】
次に、ここでプローブ209とサンプル211を近接させた場合には、はじめ原子間力が作用し、さらに接近させると接触力が作用し、これらの作用によりカンチレバー207にたわみが生じる。カンチレバー207がたわむと、光検出器235の受光面上のスポット光の位置が上下に動く。ここで、上下の受光面の差(A−B)の電圧信号を検出することで、カンチレバー207のたわみ量を測定することが可能となる。
【0013】
カンチレバー207のたわみ量は、プローブとサンプル表面間の距離に依存するため、カンチレバー207のたわみ量を光検出器235の出力電圧(A-B)で検出し、Zフィードバック回路251に入力し、たわみ量が一定、すなわち出力電圧(A-B)が一定となるように、3軸微動機構213のZ微動機構によりプローブとサンプル表面間の距離を制御し、3軸微動機構213のXYスキャナでサンプルを走査することで、サンプル表面の凹凸像が得られる。これらの制御は制御部257で行われ、XYZスキャナドライバ253により3軸微動機構213が駆動される。得られた凹凸像は表示部255に表示される。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開平10−104245号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
このような光学式変位検出機構における検出感度S、すなわち、測定対象となるカンチレバーの単位変位あたりの光検出器の上下の受光面の信号の差の出力は、光検出器の光/電流変換係数をα、光検出器の受光面への光量をP、光検出器の受光面でのスポット光の面積をA、カンチレバーが単位長さ当たり動作した時の上下の受光面でのスポット光の移動した面積の差をΔa、電流/電圧変換回路の利得(増幅率)をGとした場合、以下のように表される。
【0016】
S=GαPΔa/A (1)
ここで、Δaはカンチレバーの長さとカンチレバーから光検出器の距離で決まる光てこ光学系のてこ比で決まり、Aは集光レンズの特性と光源から光検出器までの距離で決まる。したがって、てこ比や集光レンズが決まった後で、感度を上げるためには、光検出器の受光面への光量Pを大きくするか、電流/電圧変換回路の利得(増幅率)Gを大きくする必要がある。
【0017】
しかしながら、変位検出機構の感度Sを大きくした場合、測定対象から光検出器の受光面へ入射するスポット光の位置合わせを行う際に、わずかな移動量で光検出器の出力信号が大きく変化してしまうため、位置合わせが非常に困難であった。特に、このような光学式変位検出機構を用いて試料表面の形状情報や、様々な物理情報(例えば、誘電率、磁化状態、透過率、粘弾性や摩擦係数等)を計測する表面情報計測装置の一種であるSPMでは、より微小な力を検出する要求の下、検出感度を高くする傾向が強く、更に位置合わせが困難となっている。
【0018】
また、光源からの入射光を測定対象であるカンチレバーに照射する場合には、光学顕微鏡(図示せず)の観察像でカンチレバーとカンチレバーへの照射光のスポットを観察しながら位置合わせを行うが、光の強度が強い場合にはサンプル表面やカンチレバーで散乱される散乱光の強度も大きくなり、光学顕微鏡の観察像上で光のスポットが著しく輝いて観察され、視認性が低下する。よって、カンチレバーや照射光のスポットの中心が観察しづらく、カンチレバーへの照射光のスポットの中心を正確に位置合わせすることが困難となり、その結果、測定精度の低下を引き起こす問題もあった。
【0019】
したがって、本発明の目的は、SPMなどで使用される光学式変位検出機構において、検出感度を上げた場合でも測定前の光検出器や測定対象へのスポット位置合わせを容易にかつ、確実に行うことが可能な光学式変位検出機構のスポット光の位置合わせ方法を提供することである。
【課題を解決するための手段】
【0020】
上記課題を解決するために、本発明では以下の光学式変位検出機構のスポット光の位置合わせ方法を構成し、それを用いたSPMを構成した。
【0021】
本発明の光学式変位検出機構のスポット光の位置合わせ方法では、測定対象に光を照射する光源と、その光源を駆動する光源駆動回路と、光源から測定対象に照射した後の光を受光し、光強度を検出する光検出器と、その光検出器の所定の位置にスポット光を位置決めするための光検出器用位置決め機構と、光検出器の検出信号を所定の利得で増幅する増幅器から構成される光学式変位検出機構であって、測定対象を光学式変位検出機構で実際に測定する前に、光検出器での検出感度を低減させて、スポット光を光検出器用位置決め機構により光検出器の所定の位置に位置調整を行うようにした。
【0022】
このようにすることで、検出感度を小さくすることによって、光検出器用位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。
【0023】
尚、位置合わせ後は元の検出感度に設定を戻すことで、サンプルを実際に測定するときには高感度で測定することが可能となる。
【0024】
また、具体的な検出感度の低減は、光検出器に設けた利得調整器により増幅器の利得(増幅率)設定を変えられるようにし、実測定時よりも利得を小さい値に設定することで検出感度を小さくして、前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0025】
このように、式(1)において増幅器の利得(増幅率)Gを小さくすることで、その結果、検出感度Sを小さくすることができ、光検出器用位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。
【0026】
また、本発明の光学式変位検出機構では、光強度可変手段を設けて光検出器に入射する光の強度を実測定時よりも小さい値に設定して、検出感度Sを小さくして、前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0027】
光強度の設定方法として、実際に測定対象を測定する時より光源の発光強度を光源駆動回路により実測定時よりも小さな強度にして光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0028】
別の光強度設定方法として、実際に測定対象を測定する時に光源から光検出器までの光路上のいずれかの位置に光の強度を低下させる減光フィルターを入れて、実測定時よりも小さな強度にして前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0029】
以上のように構成することで、式(1)において光検出器の受光面への光量Pを小さくすることができ、その結果、検出感度Sが小さくなり、光検出器の位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。位置合わせ後は元の光量に戻すことで、測定対象を実際に測定するときには高感度で測定することが可能となる。
【0030】
さらに、本発明では、光源の光を測定対象に照射して光のスポットの位置を調整するための光源用位置決め機構を有し、前記光強度可変手段により測定対象を実際に測定する時よりも測定対象に照射する前の光の強度を小さい値に設定して、測定対象に前記光源の光を位置決めするようにした。
【0031】
このように構成することで、測定対象へのスポット光の位置合わせを行う際に測定対象とスポット光の中心との視認性が向上し、正確かつ簡便に測定対象へのスポット光の位置合わせを行うことが可能となり、測定精度が向上する。
【0032】
また、本発明の光学式変位検出機構のスポット光の位置合わせ方法は、SPMの光学式変位検出機構の操作において適用した。なお、SPMは、測定対象を先端にプローブを有するカンチレバーまたは任意の形状のプローブとして、サンプルを保持するサンプルホルダと、先端にプローブを有するカンチレバーまたは任意形状のプローブを保持するサンプルホルダと、カンチレバーまたはプローブとサンプルホルダとを少なくともサンプル表面に垂直なZ方向に相対的に移動させる1軸以上の微動機構からなる移動手段と、光学式変位検出機構による測定結果に基づいて移動手段を制御して、前記サンプルの観察データを採取する制御手段とを備えている。
【0033】
また、光検出器の受光面が4分割または2分割され、光源からの光をカンチレバー背面に照射し、カンチレバーからの反射光を受光面で受光するSPM用の光学式変位検出機構において、測定前に光検出器上の分割面の中心付近にカンチレバーからの反射光を位置決めするようにした。
【0034】
さらに、光検出器の受光面が4分割または2分割され、光源からの光をプローブに照射し、プローブの影を光検出器の受光面上に投影するSPM用の光学式変位検出機構において、測定前に光検出器上の分割面の中心付近にプローブに照射された光を位置決めするようにした。
【発明の効果】
【0035】
以上のように、本発明の光学式変位検出機構のスポット光の位置合わせ方法を用いることでSPMをはじめとして、光検出器の感度を小さくすることで、例えば表面情報計測装置など、測定時前のカンチレバーやプローブの光学式変位検出機構のスポット光の位置合わせを容易にかつ確実に行うことが可能となり、測定精度が向上し、測定準備にかかる時間が短縮される。
【図面の簡単な説明】
【0036】
【図1】本発明に係る走査型プローブ顕微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第1実施例および第2実施例を示す概観図である。
【図2】図1中に記載されている電流/電圧変換回路を備えた増幅器の回路図である。
【図3】本発明に係る走査型近接場顕微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第3実施例を示す概観図である。
【図4】本発明に係る走査型プローブ微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第4実施例を示す概観図である。
【図5】従来の走査型プローブ顕微鏡の概観図である。
【発明を実施するための形態】
【0037】
以下、本発明のSPMについて、図面を参照して説明する。
【実施例1】
【0038】
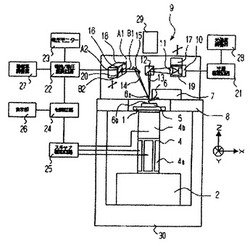
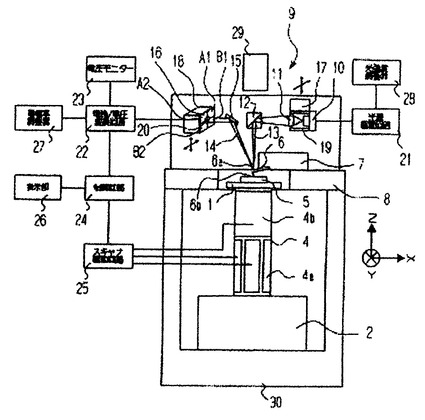
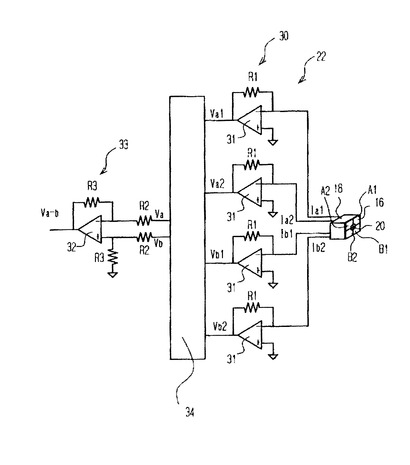
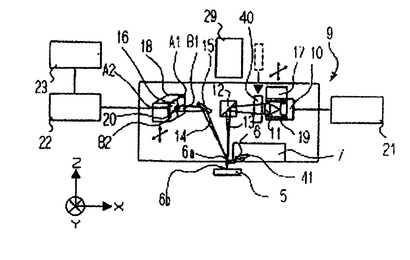
本発明に係る第1の実施例の光学式変位検出機構のスポット光の位置合わせ方法に係わる概念図を図1、図2に示す。図1はSPMに光学式変位検出機構を適用した場合の概観図である。なお、図1は正面図で示しているが光検出器の部分について斜視図で記載している。また、図2は図1の電流/電圧変換回路を備えた増幅器22の回路図である。
【0039】
本実施例では先端にサンプルホルダ1が固定され、末端が粗動機構2上に固定された円筒型圧電素子からなる3軸微動機構4を有する。3軸微動機構4は、サンプルホルダ1上に置かれたサンプル5をサンプル面内(XY平面)方向に走査するXYスキャナ部4aと、サンプル面内と垂直な方向(Z方向)に微動するZ微動機構4bを有している。
【0040】
サンプル5の上方には、カンチレバー部6aの先端に先鋭化されたプローブ6bを有する、シリコン製のカンチレバー6が、カンチレバーホルダ7を介してベース8に固定されている。カンチレバー6の上方には光学式変位検出機構9が配置される。
【0041】
ここで、本実施例でのSPMの動作原理を説明する。本実施例はSPMの一種である原子間力顕微鏡であり、サンプル表面の凹凸像の測定を行うために用いられる。本実施例では一般にコンタクト式原子間力顕微鏡と呼ばれている方式を用いている。
【0042】
粗動機構2によりサンプル5をプローブ6bに接近させていくと、プローブ6bとサンプル5の間に原子間力が作用し、プローブ6bは引力を受ける。さらに接近させていくとプローブ6bは斥力を受けるようになり、最後はプローブ6bとサンプル5が接触する。このとき、プローブ6bが受ける力に応じて、カンチレバー部6aにたわみが生じる。プローブ6bが受ける力、すなわちカンチレバー部6aのたわみ量は、プローブ6bとサンプル5の表面間の距離に依存する。
【0043】
したがって、カンチレバー部6aのたわみ量が一定となるようにZ微動機構4bでプローブ6bとサンプル5の間の距離を変化させながら、XYスキャナ部4aでサンプル5をラスタスキャンすることでサンプル5の表面の凹凸形状を得ることができる。
【0044】
次に、本実施例の光学式変位検出機構9の構成と動作原理について述べる。
【0045】
この光学式変位検出機構9は、一般に光てこ方式と呼ばれるものであり、光源10に半導体レーザを使用し、光源10から発光されるレーザ光を集光レンズ11で集光し、ビームスプリッター12で入射光13の光路を曲げて測定対象であるカンチレバー部6aの背面に直上(Z方向)から照射する。光源10の光の強度は光源駆動回路21により設定される。
【0046】
カンチレバー6はXY平面に対して傾けられて配置されており、反射光14は入射光13の光軸とは異なる方向に反射される。反射光14はミラー15で曲げられて、光検出器16上に入射する。
【0047】
光の光路はカンチレバー部6aの背面で一旦結像し光検出器16の受光面上では有限の大きさを持ったスポット20を形成するように構成される。光検出器16は、半導体を材料として製作されており、受光面が4分割(A1、A2、B1、B2)された構成となっている。
【0048】
光検出器16に光が入射すると、光検出器16を構成する半導体から電流信号が発生し、光検出器16の後端に設けられた電流/電圧変換回路を備えた増幅器22により、4つの受光面ごとに所定の増幅率で電圧信号に変換される。このときの出力は電圧モニター23で表示される。
【0049】
ここで、カンチレバー部6aがZ方向に撓んだ場合には、光検出器16上のスポット20は受光面上で上下に動作する。したがって4分割された受光面(A1、A2、B1、B2)のうち、上側の2つの受光面の領域A(A1+A2)と、下側の2つの受光面の領域B(B1+B2)に入射する光の強度差A−Bを測定することでカンチレバー部6aのたわみ量を測定することが可能となる。
【0050】
ここで、図2により電流/電圧変換回路を備えた増幅器22の回路構成を説明する。本実施例の光学式変位検出機構では、光検出器16の上側の受光面の領域Aと、下側の受光面の領域Bに入射する光の強度差を測定することでカンチレバー部6aのたわみ量を測定することが可能となる。ここで、各受光面に入射する光の強度をPa1、Pa2、Pb1、Pb2とする。各受光面にPa1、Pa2、Pb1、Pb2の強さの光が入射すると、光検出器16により光信号が電気信号に変換されて、それぞれの受光面A1、A2、B1、B2から電流Ia1、Ia2、Ib1、Ib2が発生する。この電流は、それぞれの受光面に接続されたオペアンプ31と抵抗R1により構成される電流電圧変換回路30により、電圧信号Va1、Va2、Vb1、Vb2に変換される。このとき、電流電圧変換回路30のフィードバック抵抗値をR1とすると、Va1=R1×Ia1、Va2=R1×Ia2、Vb1=R1×Ib1、Vb2=R1×Ib2の関係がある。このように、初段の電流電圧変換回路30では増幅率R1で増幅されて、電流信号が電圧信号に変換される。これらの電圧信号は、加算回路34に入力されて、上側2つの受光面の光量の和Va=Va1+Va2、下側2つの受光面の光量の和Vb=Vb1+Vb2が出力される。これらの信号は、オペアンプ32と抵抗R2,R3により構成される差動増幅回路33に送られて、電圧の差信号Va−bを検出する。ここで、図のようにオペアンプと抵抗値R2、R3で差動増幅器を構成した場合、Va−b=(R3/R2)×(Va−Vb)の関係が成り立ち、差動増幅器により増幅率R3/R2で増幅されて、Va−bが出力される。このVa−bを検出することでカンチレバーのたわみ量を測定することができる。
【0051】
本実施例では、受光感度0.65A/Wの光検出器16を用い、SPMで測定対象を測定する場合、電流電圧変換回路30のフィードバック抵抗値R1は100kΩに設定し。また、差動増幅回路33の抵抗値はR2=10kΩ,R3=20kΩに設定した。
【0052】
すなわち実測定時の増幅率は、初段の電流/電圧変換回路で100000倍、差動増幅器で2倍に設定される。
【0053】
この、A−Bの電圧信号Va−bを制御回路24に送り、あらかじめ設定した動作点と比較して、その差分に応じた信号によりスキャナ駆動回路25からZ微動機構4bを動作させて、サンプル5とプローブ6b間の距離を一定に保つように制御を掛ける。さらに、スキャナ駆動回路25により、XYスキャナ部4aを動作させサンプル5をラスタスキャンさせる。
【0054】
このとき、3軸微動機構4に掛けた電圧信号を表示部26で表示させることで、サンプル5の表面の凹凸像が得られる。
【0055】
ここで、測定前の光学式変位検出機構9の調整方法を述べる。カンチレバー6は消耗品であり、測定の都度交換が必要となる場合がある。また、測定の目的に応じて、材質や形状の異なるカンチレバーの中から最適なものが選択されて使用される。したがって、カンチレバー6の交換の都度、入射光13をカンチレバー部6aの背面に位置合わせし、さらに、反射光14を光検出器16の受光面に位置合わせする必要がある。
【0056】
まず、カンチレバー部6aの背面へのスポット光の位置合わせに際しては、まず、光学顕微鏡29で、カンチレバー6とサンプル5の表面さらにサンプル表面上の入射光13のスポットを観察する。光源10と集光レンズ11から構成される光源モジュール19は、2軸の送りねじ式のステージより構成される光源用位置決め機構17に取り付けられており、この光源用位置決め機構17を動作させることで、入射光13をXY平面で動かすことが可能となる。光学顕微鏡29の像によりカンチレバー6とサンプル5に照射された入射光13のスポットを観察しながら、カンチレバー6aの背面に入射光13のスポットの中心が位置するように正確に位置決めする。
【0057】
次に、光検出器16のスポット光の位置合わせについて説明する。光検出器16にも2軸の送りねじ方式のステージより構成される光検出器用位置決め機構18が取り付けられている。光検出器16の受光面上に反射光のスポット20の位置合わせを行う際には、電圧モニター23の信号を見ながら、まずは4分割された受光面の光量の総和(Pa1+Pa2+Pb1+Pb2)が最大となるように光検出器用位置決め機構18により位置合わせを行う。この状態では、光検出器16の受光面の任意の位置にスポット20が位置決めされている。次にスポット20を4分割された受光面の中心に位置合わせする。そのため、上下の受光面の差(Va1+Va2)−(Vb1+Vb2)の信号を電圧モニター23で観察しながら、信号が概ね0となるように光検出器用位置決め機構18により光検出器16を動かして位置合わせする。これによりスポット20を上下の受光面の中心に位置合わせすることができる。カンチレバー6aのたわみを検出する場合には、ここまでの位置合わせで十分であり、上下2分割の受光面を持つ光検出器でも測定可能であるが、例えばカンチレバー6aのねじれ量を測りプローブ6bの先端とサンプル5表面の摩擦力を測定する摩擦力顕微鏡などの場合には、左右の信号の差(Va1+Vb1)−(Va2+Vb2)によりねじれ量の測定を行うため、左右(紙面に垂直な方向)の受光面の信号の差が0となるように光検出器用位置決め機構18により位置合わせを行う必要がある。
【0058】
ここで、SPMにおいてサンプルの特性を高感度に測定するためには、光検出器16の検出感度(測定対象(ここではカンチレバー6)の単位変位あたりの電圧出力)を高くする必要があるが、検出感度が高い場合には、光検出器16上に反射光のスポット20の位置合わせを行う場合に、光検出器用位置決め機構18をわずかに動かしただけで、上下の受光面の出力差の信号が著しく変動し、光検出器16の受光面の中心へ反射光のスポット20位置合わせを行うことが非常に困難となる。
【0059】
そこで、増幅器22で設定される利得(増幅率)の設定を変えられるように利得(増幅率)調整器27を設け、利得(増幅率)を下げて光検出器16上に反射光14のスポット20の位置合わせを行うようにした。すなわち、式(1)で利得(増幅率)Gを下げることで、検出感度Sを下げて、光検出器用位置決め機構18を動かしても出力電圧の変動が少なくなるように設定した。増幅率を変更するためには、図2の回路の抵抗値R1、R2、R3のいずれかを可変とすることで実現できる。また、差動増幅回路33以降の制御回路24内での電気回路内での調整や信号処理系でのソフトウエアの設定で変更してもよい。
【0060】
この結果、光検出器16へのスポット20の位置合わせが容易に、かつ正確に行うことが可能となった。その結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0061】
光学式変位検出機構9の測定準備が終わった後は利得(増幅率)調整器27の増幅率を元の値に設定することで、検出感度を高くすることで実際にサンプルを高精度で測定を行うことが可能となる。
【実施例2】
【0062】
本発明に係る、本発明に係る第2の実施例の光学式変位検出機構のスポット光の位置合わせ方法を図1により説明する。基本構成は第1の実施例と同じであるため、重複する部分の説明は省略する。この第2の実施例では、光学式変位検出機構9の光源10の光源駆動回路21に、光強度調整器28を取り付けた構造となっている。
【0063】
測定前にカンチレバー部6aの背面への入射光13の位置合わせと、光検出器16の受光面へのスポットの位置合わせを行う場合には、この光強度調整器28により、実測定時よりも光源10の強度を小さくして位置合わせを行う。本実施例では半導体レーザ10を駆動する電流値を下げることで強度を小さくした。
【0064】
まず、カンチレバー部6aの背面への位置合わせを行う場合には、光学顕微鏡29で、カンチレバー6とサンプル5の表面、サンプル表面上の入射光13のスポットを観察する。光源10と集光レンズ11から構成される光源モジュール19は、2軸の送りねじ式のステージより構成される光源用位置決め機構17に取り付けられており、光学顕微鏡像29を観察しながら、この光源用位置決め機構17を動作させ、入射光をXY平面で動かし、カンチレバー部6a背面へ入射光13のスポットの中心に位置するように位置合わせする。このとき光源10の強度が大きいと、サンプル5の表面やカンチレバー部6aの背面で散乱される入射光の散乱光が増大し、光学顕微鏡29の観察像の中で散乱光の強度が強くなり、カンチレバー6や、入射光13のスポットの中心の視認性が著しく悪くなる。したがって、光源10の光量の強度を落とすことで、入射光13の強度が小さくなりその結果、散乱光強度も小さくなり、観察像で散乱光がほとんど観察されなくなってカンチレバー6と入射光13のスポットの視認性が向上し、容易にかつ確実に入射光13をカンチレバー部6aの背面に位置決めすることが可能となる。
【0065】
また、光検出器16の中心に反射光14のスポット20を位置合わせする場合には、スポット20の強度も小さくなるため、式(1)の強度Pを小さくすることができ、第一の実施例と同様に検出感度Sが下がり、検出器用位置決め機構18を動かしても出力電圧の変動が少なくなる。この結果、光検出器へのスポットの位置合わせが容易に、かつ正確に行うことが可能となった。その結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0066】
本実施例においても、光学式変位検出機構9の測定準備が終わった後は光源10の強度を元の値に設定することで、検出感度が位置合わせ調整時よりも高くなり実際にサンプルを高精度で測定を行うことが可能となる。
【実施例3】
【0067】
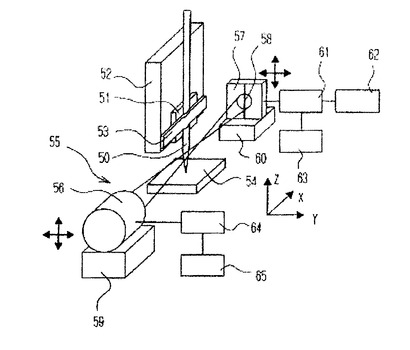
本発明の第3の実施例を図3に示す。図3はSPMの一種である走査型近接場顕微鏡のプローブとプローブの変位検出用の光学式変位検出機構のスポット光の位置合わせ方法に係わる模式図である。なお、主要部以外の詳細な構成は省略している。
【0068】
本実施例で使用されるプローブ50は光ファイバーの先端を先鋭化し、先端部に開口を設け、開口以外の部分をアルミニウムでコートした構成である。このプローブ50を加振用の圧電素子51が取り付けられたプローブホルダ52に板バネ53で固定し、プローブ50の長軸方向がサンプル54の表面と直交するように配置する。
【0069】
このように配置したプローブ50を、加振用圧電素子51により、サンプル54の表面と平行な方向(図のY軸方向)にプローブ50の共振周波数の近傍で加振する。このときプローブ50の先端とサンプル54の表面を接近させると、サンプル54の表面の吸着層の抵抗力や、摩擦力あるいは原子間力などの力をプローブ先端が受ける。これらの力は総称してシアフォースと呼ばれる。シアフォースを受けるとプローブ50の振幅が減少する。この振幅の減少量はプローブ50の先端とサンプル54の表面の距離に依存する。したがってプローブ50の振幅量や位相の変化を計測しながら、振幅や位相が一定となるようにサンプル54とプローブ50間の距離を制御することで、サンプル54とプローブ50を一定の距離に保つことが可能である。実施例1と同じく、この状態でサンプル54とプローブ50を相対的にラスタスキャンすることでサンプル表面の凹凸像を測定することが可能である。走査型近接場顕微鏡では、プローブ50に光を入射し、プローブ先端の開口部近傍にエバネッセント光を発生させて、サンプル54に照射し、サンプル表面で散乱させて、その散乱光を検出器により検出することで、サンプル54の表面の光学的な特性も同時に測定することが可能である。
【0070】
ここで、本実施例でのプローブ50の振幅量の測定方法を説明する。本実施例の光学式変位検出機構55は、集光レンズと半導体レーザが組み込まれた光源部56と、表面が2分割され半導体を材料とする光検出器57から構成される。光源部56からの光は、真横方向(図のX方向)からプローブ50に照射される。このとき光源部56からの光は結像されるが、プローブ50への照射点はプローブ50ですべての光が遮られない程度に結像点からずれた位置で照射される。
【0071】
プローブ50に照射された光は、一端結像し、その後再び広がって、プローブ50に対して光源部56と対向する位置に配置される光検出器57の面内に有限のスポット58を作製するように入射する。このときスポット58内にはプローブ50で遮られた部分が影となって現れる。
【0072】
プローブ50へのスポット光の位置合わせに際しては、まず、光源部56に設けられた2軸の光源用位置決め機構59で光源部56を動かしてプローブ50に光が当たるように位置合わせする。次に光検出器57側に設けられた1軸の光検出器用位置決め機構60により光検出器57を左右方向(図のY方向)動かして、光検出器57の後ろ側に配置された電流/電圧変換回路を備えた増幅器61の出力を電圧モニター63で観察しながら、光検出器57の概ね中央付近にスポット58が当たるように位置合わせする。
【0073】
このように構成された光学式変位検出機構55においてプローブ50が振動すると、2分割された光検出器57の受光面上の影により遮られていない部分の面積差が変化するため、2つの分割面の光出力の差分を検出することでプローブ50の振幅量あるいは位相を測定することが可能となる。
【0074】
本実施例においても、第1、第2の実施例と同様に、光源56の光強度を光源駆動回路64に設けられた光強度調整器65で調整できるようにしており、プローブ50にレーザ光を照射する場合にレーザの強度を小さくして視認性を向上し、容易にかつ確実に入射光をプローブ50に位置決めすることが可能となる。また、増幅器61には利得(増幅率)調整器62を設けているため、測定感度を下げて、光検出器57へのスポット光の位置合わせを容易に、かつ正確に行うことが可能となる。以上の結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0075】
本実施例でも、光学式変位検出機構55の測定準備が終わった後は増幅率や光源の強度を元の値に設定することで、検出感度が位置合わせ調整時よりも高くなり実際にサンプルを高精度で測定を行うことが可能となる。
【実施例4】
【0076】
図4は本発明の第3の実施例のSPMに用いられる光学式変位検出機構のスポット光の位置合わせ方法に係わる模式図である。本実施例は基本的な構成は図1を用いて第1、第2の実施例で説明した光てこ方式の光学式変位検出機構と同じものであるため、重複する部分の説明は省略する。図1との違いは、光源駆動回路21に光強度調整器を持たず、また増幅器22に利得(増幅率)調整器を設けていない点にある。
【0077】
本実施例では、測定前の光学式変位検出機構9の位置合わせ調整の際に、光源10とカンチレバー6aの間の光路に光の強度を減光させる減光フィルター40を挿入してカンチレバー6aに入射する光の強度を小さくするようにした。この結果、カンチレバー部6a上に入射光13のスポットを位置決めする場合の視認性が向上し、容易にかつ確実に入射光13をカンチレバー部6aの背面に位置決めが可能となる。また、検出感度も下がるため、光検出器16への反射光14のスポットの位置合わせも容易に、かつ正確に行うことが可能である。以上の結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0078】
本実施例でも、光学式変位検出機構9の位置合わせ準備が終わった後は、減光フィルター40を光路から外すことで光源10の強度が元の値に戻り、検出感度を位置合わせ調整時よりも高くすることで実際にサンプルを高精度で測定を行うことが可能となる。
【0079】
なお、減光フィルター40はカンチレバー部6aに反射した後の光路上に入れてもよい。この場合、カンチレバー部6aへの入射光13のスポットの位置合わせの視認性に関しては変化がないため、特に光学顕微鏡29で入射光13の強度を落とすと入射光13のスポットが観察しづらいような場合に有利となる。また、検出感度は小さくすることができるため、光検出器16への反射光14のスポットの位置合わせの方は容易に、かつ正確に行うことが可能である。
【0080】
なお、本実施例では、カンチレバー6が圧電素子よりなる加振器41により共振周波数近傍で加振するように構成される、いわゆる振動方式の原子間力顕微鏡とした。本実施例では光学式変位検出機構9によりカンチレバー部6aの振幅や位相を計測しながら、プローブ6bをサンプル5に近接させていくと、原子間力や間欠的な接触量が作用して振幅や位相が変化する。この変化量はプローブ6bとサンプル5の間の距離に依存するため、振幅や位相が一定となるようにプローブ6bとサンプル5の間の距離を制御することでプローブ6bとサンプル5の間距離を一定に保つことが可能となる。
【0081】
以上、本発明の実施例について述べたが、本発明はこれらの実施例に限定されるものではない。例えば、本実施例では受光面が4分割または2分割された半導体製の光検出器を使用したが、受光面を持ち、電圧信号が出力される位置検出素子であれば任意の検出器を適用可能である。例えば、分割面を持たず、受光面上のスポット位置を検出可能な位置検出素子(Position Sensitive Detector:PSD)と呼ばれる半導体素子などが市販されている。
【0082】
また、光学系も本実施例に限定されず、測定対象に光を照射し、測定対象を経由した光を光検出器で受光し、光検出器からの信号により測定対象の変位を測定するものであれば任意の光学式変位検出機構に適用可能である。
【0083】
また、光源も、半導体レーザ(LD)に限定されず、例えば可干渉性が半導体レーザよりも低いスーパールミネッセンスダイオード(SLD)や、白色光源、発光ダイオード(LED)など任意の光源が適用できる。
【0084】
光検出器や光源に設けられる位置決め機構は、手動式、自動式を問わず、任意の機構が使用できる。位置決めの自由度も直交1軸または2軸に限定されず、多軸でもよいし、またあおり機構を用いた場合等も本発明に含まれる。
【0085】
光源の光強度調整器や光検出器側の増幅率調整器も任意の方式のものが使用可能で、例えば、ボリュームツマミを用いて連続的に可変する方法でもよいし、あらかじめ複数の設定値を決めておき、切り替えスイッチにより設定を行う方法でもよい。
【0086】
また、光源の光強度調整に用いられる減光フィルターは光量を可変する目的で用いるものであれば任意のフィルターが使用できる。
【0087】
また、SPMは、実施例で述べたコンタクト方式や振動方式の原子間力顕微鏡や、走査型近接場顕微鏡に限定されず、カンチレバーやプローブを用いて、これらの変位や振幅を検出しながら、プローブとサンプル表面間の距離を制御したり、プローブにかかる力や相互作用を検出することで、サンプル表面の物性を測定するものはすべて本発明に含まれる。また、プローブによりサンプル表面への加工や、サンプル表面の物質のマニピュレーションを行うものなども、すべて本発明に含まれる。また、必ずしもXYスキャナで走査させる必要はなく、Z微動機構を用いて高さ方向の相互作用を検出する場合のみであっても本発明に含まれる。
【0088】
また、本発明の光学式変位検出機構のスポット光の位置合わせ方法は、SPMへの適用に限定されるものではない。例えば、光学式変位検出機構を用いた表面粗さ計、電気化学顕微鏡等の表面情報計測装置や、プローブで試料表面を加工するプローブ加工装置などにも適用することができる。
【符号の説明】
【0089】
1 サンプルホルダ
2 粗動機構
4 3軸微動機構
5、54 サンプル
6 カンチレバー(測定対象)
6a カンチレバー部
6b プローブ
9、55 光学式変位検出機構
10、56 光源
16、57 光検出器
17、59 光源用位置決め機構
18、60 光検出器用位置決め機構
19 光源ユニット
21、64 光源駆動回路
22、61 増幅器
23、63 電圧モニター
27、62 利得(増幅率)調整器
28、65 光強度調整器
29 光学顕微鏡
30 電流/電圧変換回路
33 差動増幅回路
34 加算回路
40 減光フィルター
50 プローブ
201 走査型プローブ顕微鏡
205 アーム
207 カンチレバー
209 プローブ
211 サンプル
212 サンプルステージ
213 3軸微動機構(スキャナ)
221 光源
231 入射光
233 反射光
235 光検出器
【技術分野】
【0001】
本発明は、特に、様々な物理情報(例えば、誘電率、磁化状態、透過率、粘弾性や摩擦係数等)を計測する走査型プローブ顕微鏡、表面粗さ計、硬度計や電気化学顕微鏡等の表面情報計測装置等に用いられる、測定対象に光源からの光を照射し、照射後の光の強度を光検出器で検出する光学式変位検出機構のスポット光の位置合わせ方法およびそれを用いた走査型プローブ顕微鏡に関するものである。
【背景技術】
【0002】
金属、半導体、セラミック、樹脂、高分子、生体材料、絶縁物等のサンプルを微小領域にて測定し、試料表面の凹凸像や物性情報の観察等を行う装置として、走査型プローブ顕微鏡(SPM:Scanning Probe Microscope、以後SPMと略記)が知られている。
【0003】
これらSPMでは、サンプルが載置されるサンプルホルダと、先端にプローブを有し、サンプルの表面に近接させるカンチレバーを備えたものが周知となっている。そして、これらサンプルとプローブとをサンプル面内(XY平面)で相対的に走査させ、この走査中にカンチレバーの変位量を変位検出機構により測定しながら、サンプルまたはプローブをサンプル表面と直交する方向(Z方向)に動作させて、サンプルとプローブの距離制御を行うことにより、表面形状や各種物性情報を測定するようになっている。
【0004】
ここで、従来の典型的な光学式変位検出機構を用いたSPMの概略構成図を図5に示す(特許文献1参照)。
【0005】
図5のSPM201は、先端にサンプル211を載せるサンプルステージ212を有し、末端がベース215上に固定された円筒型の圧電素子より構成される3軸微動機構(スキャナ)213によりサンプルがサンプル面内(XY平面)で走査されながら、サンプル面と垂直な方向(Z方向)に微動される。
【0006】
また、先端にプローブ209を有するカンチレバー207が、剛性の高いアーム205を介してベース215に固定された支柱203に保持されている。カンチレバー207の先端部下面には、プローブ209が下方に突出するように形成されており、Z方向に動作可能な粗動機構(図示せず)により、プローブ209の先端をサンプル211表面に近接させる構成である。
【0007】
カンチレバー207上方には、一般に光てこ方式と呼ばれる光学式変位検出機構が設けられている。
【0008】
この光学式変位検出機構は、カンチレバー207の上方に設置され半導体レーザからなる光源221からレーザ光(入射光231)を集光レンズ(図示せず)によりカンチレバー207の背面に集光して照射する。この入射光231は、カンチレバー207の背面で反射し、反射光233がカンチレバー207の斜め上方に設置され半導体により構成された光検出器235に当る。この光検出器235は受光面が上下に2分割され、反射光233の入射位置を検出することができる。
【0009】
ここで、この光てこ方式の光学式変位検出機構の動作原理を詳細に説明する。SPMの測定を行う前に、まず、光源221からの入射光をカンチレバー207の背面に位置決めする。このとき通常は光源221にカンチレバー207の面内で入射光231のスポットが移動可能な2軸の位置決めステージ(図示せず)が設けられており、カンチレバー207の背面とサンプル211上に照射されたスポット光の様子が観察可能な光学顕微鏡(図示せず)の像を見ながら位置合わせが行われる。
【0010】
次に、カンチレバー207の背面で反射された反射光を、光検出器235の受光面内に位置合わせする。光検出器235にも通常は受光面内で移動可能な2軸の位置決めステージ(図示せず)が設けられている。光検出器235は半導体材料より構成されており、受光面に光が当たると電流が発生する。受光面の後ろ側には、電流/電圧変換回路(図示せず)が接続されており、あらかじめ規定された増幅率により、電流信号が電圧信号に変換されて、後述するZフィードバック回路251に電圧信号が入力される。
【0011】
反射光233のスポットを受光面内で位置合わせするためには、まず、2分割された上側の受光面(A)と下側の受光面(B)との光量の和(A+B)が最大となるように、電流/電圧変換回路からの電圧信号を見ながら位置合わせする。この状態では、受光面内の任意の位置に反射光のスポットが位置合わせされた状態である。次に、スポット光が受光面の上下の受光面の中心来るように、さらに精密に位置合わせする。このときには上下の受光面の差(A−B)の電圧信号が概ね0となるように光検出器235にも設けられた位置決め機構を微調する。このように位置合わせすることで、スポット光の照射位置を上下の受光面の中心に精密に位置合わせすることが可能となる。
【0012】
次に、ここでプローブ209とサンプル211を近接させた場合には、はじめ原子間力が作用し、さらに接近させると接触力が作用し、これらの作用によりカンチレバー207にたわみが生じる。カンチレバー207がたわむと、光検出器235の受光面上のスポット光の位置が上下に動く。ここで、上下の受光面の差(A−B)の電圧信号を検出することで、カンチレバー207のたわみ量を測定することが可能となる。
【0013】
カンチレバー207のたわみ量は、プローブとサンプル表面間の距離に依存するため、カンチレバー207のたわみ量を光検出器235の出力電圧(A-B)で検出し、Zフィードバック回路251に入力し、たわみ量が一定、すなわち出力電圧(A-B)が一定となるように、3軸微動機構213のZ微動機構によりプローブとサンプル表面間の距離を制御し、3軸微動機構213のXYスキャナでサンプルを走査することで、サンプル表面の凹凸像が得られる。これらの制御は制御部257で行われ、XYZスキャナドライバ253により3軸微動機構213が駆動される。得られた凹凸像は表示部255に表示される。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開平10−104245号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
このような光学式変位検出機構における検出感度S、すなわち、測定対象となるカンチレバーの単位変位あたりの光検出器の上下の受光面の信号の差の出力は、光検出器の光/電流変換係数をα、光検出器の受光面への光量をP、光検出器の受光面でのスポット光の面積をA、カンチレバーが単位長さ当たり動作した時の上下の受光面でのスポット光の移動した面積の差をΔa、電流/電圧変換回路の利得(増幅率)をGとした場合、以下のように表される。
【0016】
S=GαPΔa/A (1)
ここで、Δaはカンチレバーの長さとカンチレバーから光検出器の距離で決まる光てこ光学系のてこ比で決まり、Aは集光レンズの特性と光源から光検出器までの距離で決まる。したがって、てこ比や集光レンズが決まった後で、感度を上げるためには、光検出器の受光面への光量Pを大きくするか、電流/電圧変換回路の利得(増幅率)Gを大きくする必要がある。
【0017】
しかしながら、変位検出機構の感度Sを大きくした場合、測定対象から光検出器の受光面へ入射するスポット光の位置合わせを行う際に、わずかな移動量で光検出器の出力信号が大きく変化してしまうため、位置合わせが非常に困難であった。特に、このような光学式変位検出機構を用いて試料表面の形状情報や、様々な物理情報(例えば、誘電率、磁化状態、透過率、粘弾性や摩擦係数等)を計測する表面情報計測装置の一種であるSPMでは、より微小な力を検出する要求の下、検出感度を高くする傾向が強く、更に位置合わせが困難となっている。
【0018】
また、光源からの入射光を測定対象であるカンチレバーに照射する場合には、光学顕微鏡(図示せず)の観察像でカンチレバーとカンチレバーへの照射光のスポットを観察しながら位置合わせを行うが、光の強度が強い場合にはサンプル表面やカンチレバーで散乱される散乱光の強度も大きくなり、光学顕微鏡の観察像上で光のスポットが著しく輝いて観察され、視認性が低下する。よって、カンチレバーや照射光のスポットの中心が観察しづらく、カンチレバーへの照射光のスポットの中心を正確に位置合わせすることが困難となり、その結果、測定精度の低下を引き起こす問題もあった。
【0019】
したがって、本発明の目的は、SPMなどで使用される光学式変位検出機構において、検出感度を上げた場合でも測定前の光検出器や測定対象へのスポット位置合わせを容易にかつ、確実に行うことが可能な光学式変位検出機構のスポット光の位置合わせ方法を提供することである。
【課題を解決するための手段】
【0020】
上記課題を解決するために、本発明では以下の光学式変位検出機構のスポット光の位置合わせ方法を構成し、それを用いたSPMを構成した。
【0021】
本発明の光学式変位検出機構のスポット光の位置合わせ方法では、測定対象に光を照射する光源と、その光源を駆動する光源駆動回路と、光源から測定対象に照射した後の光を受光し、光強度を検出する光検出器と、その光検出器の所定の位置にスポット光を位置決めするための光検出器用位置決め機構と、光検出器の検出信号を所定の利得で増幅する増幅器から構成される光学式変位検出機構であって、測定対象を光学式変位検出機構で実際に測定する前に、光検出器での検出感度を低減させて、スポット光を光検出器用位置決め機構により光検出器の所定の位置に位置調整を行うようにした。
【0022】
このようにすることで、検出感度を小さくすることによって、光検出器用位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。
【0023】
尚、位置合わせ後は元の検出感度に設定を戻すことで、サンプルを実際に測定するときには高感度で測定することが可能となる。
【0024】
また、具体的な検出感度の低減は、光検出器に設けた利得調整器により増幅器の利得(増幅率)設定を変えられるようにし、実測定時よりも利得を小さい値に設定することで検出感度を小さくして、前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0025】
このように、式(1)において増幅器の利得(増幅率)Gを小さくすることで、その結果、検出感度Sを小さくすることができ、光検出器用位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。
【0026】
また、本発明の光学式変位検出機構では、光強度可変手段を設けて光検出器に入射する光の強度を実測定時よりも小さい値に設定して、検出感度Sを小さくして、前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0027】
光強度の設定方法として、実際に測定対象を測定する時より光源の発光強度を光源駆動回路により実測定時よりも小さな強度にして光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0028】
別の光強度設定方法として、実際に測定対象を測定する時に光源から光検出器までの光路上のいずれかの位置に光の強度を低下させる減光フィルターを入れて、実測定時よりも小さな強度にして前記光検出器の所定の位置に光のスポットの位置決めを行うようにした。
【0029】
以上のように構成することで、式(1)において光検出器の受光面への光量Pを小さくすることができ、その結果、検出感度Sが小さくなり、光検出器の位置決め機構による位置合わせを容易に、かつ確実に行うことが可能となる。位置合わせ後は元の光量に戻すことで、測定対象を実際に測定するときには高感度で測定することが可能となる。
【0030】
さらに、本発明では、光源の光を測定対象に照射して光のスポットの位置を調整するための光源用位置決め機構を有し、前記光強度可変手段により測定対象を実際に測定する時よりも測定対象に照射する前の光の強度を小さい値に設定して、測定対象に前記光源の光を位置決めするようにした。
【0031】
このように構成することで、測定対象へのスポット光の位置合わせを行う際に測定対象とスポット光の中心との視認性が向上し、正確かつ簡便に測定対象へのスポット光の位置合わせを行うことが可能となり、測定精度が向上する。
【0032】
また、本発明の光学式変位検出機構のスポット光の位置合わせ方法は、SPMの光学式変位検出機構の操作において適用した。なお、SPMは、測定対象を先端にプローブを有するカンチレバーまたは任意の形状のプローブとして、サンプルを保持するサンプルホルダと、先端にプローブを有するカンチレバーまたは任意形状のプローブを保持するサンプルホルダと、カンチレバーまたはプローブとサンプルホルダとを少なくともサンプル表面に垂直なZ方向に相対的に移動させる1軸以上の微動機構からなる移動手段と、光学式変位検出機構による測定結果に基づいて移動手段を制御して、前記サンプルの観察データを採取する制御手段とを備えている。
【0033】
また、光検出器の受光面が4分割または2分割され、光源からの光をカンチレバー背面に照射し、カンチレバーからの反射光を受光面で受光するSPM用の光学式変位検出機構において、測定前に光検出器上の分割面の中心付近にカンチレバーからの反射光を位置決めするようにした。
【0034】
さらに、光検出器の受光面が4分割または2分割され、光源からの光をプローブに照射し、プローブの影を光検出器の受光面上に投影するSPM用の光学式変位検出機構において、測定前に光検出器上の分割面の中心付近にプローブに照射された光を位置決めするようにした。
【発明の効果】
【0035】
以上のように、本発明の光学式変位検出機構のスポット光の位置合わせ方法を用いることでSPMをはじめとして、光検出器の感度を小さくすることで、例えば表面情報計測装置など、測定時前のカンチレバーやプローブの光学式変位検出機構のスポット光の位置合わせを容易にかつ確実に行うことが可能となり、測定精度が向上し、測定準備にかかる時間が短縮される。
【図面の簡単な説明】
【0036】
【図1】本発明に係る走査型プローブ顕微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第1実施例および第2実施例を示す概観図である。
【図2】図1中に記載されている電流/電圧変換回路を備えた増幅器の回路図である。
【図3】本発明に係る走査型近接場顕微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第3実施例を示す概観図である。
【図4】本発明に係る走査型プローブ微鏡用の光学式変位検出機構のスポット光の位置合わせ方法に係わる第4実施例を示す概観図である。
【図5】従来の走査型プローブ顕微鏡の概観図である。
【発明を実施するための形態】
【0037】
以下、本発明のSPMについて、図面を参照して説明する。
【実施例1】
【0038】
本発明に係る第1の実施例の光学式変位検出機構のスポット光の位置合わせ方法に係わる概念図を図1、図2に示す。図1はSPMに光学式変位検出機構を適用した場合の概観図である。なお、図1は正面図で示しているが光検出器の部分について斜視図で記載している。また、図2は図1の電流/電圧変換回路を備えた増幅器22の回路図である。
【0039】
本実施例では先端にサンプルホルダ1が固定され、末端が粗動機構2上に固定された円筒型圧電素子からなる3軸微動機構4を有する。3軸微動機構4は、サンプルホルダ1上に置かれたサンプル5をサンプル面内(XY平面)方向に走査するXYスキャナ部4aと、サンプル面内と垂直な方向(Z方向)に微動するZ微動機構4bを有している。
【0040】
サンプル5の上方には、カンチレバー部6aの先端に先鋭化されたプローブ6bを有する、シリコン製のカンチレバー6が、カンチレバーホルダ7を介してベース8に固定されている。カンチレバー6の上方には光学式変位検出機構9が配置される。
【0041】
ここで、本実施例でのSPMの動作原理を説明する。本実施例はSPMの一種である原子間力顕微鏡であり、サンプル表面の凹凸像の測定を行うために用いられる。本実施例では一般にコンタクト式原子間力顕微鏡と呼ばれている方式を用いている。
【0042】
粗動機構2によりサンプル5をプローブ6bに接近させていくと、プローブ6bとサンプル5の間に原子間力が作用し、プローブ6bは引力を受ける。さらに接近させていくとプローブ6bは斥力を受けるようになり、最後はプローブ6bとサンプル5が接触する。このとき、プローブ6bが受ける力に応じて、カンチレバー部6aにたわみが生じる。プローブ6bが受ける力、すなわちカンチレバー部6aのたわみ量は、プローブ6bとサンプル5の表面間の距離に依存する。
【0043】
したがって、カンチレバー部6aのたわみ量が一定となるようにZ微動機構4bでプローブ6bとサンプル5の間の距離を変化させながら、XYスキャナ部4aでサンプル5をラスタスキャンすることでサンプル5の表面の凹凸形状を得ることができる。
【0044】
次に、本実施例の光学式変位検出機構9の構成と動作原理について述べる。
【0045】
この光学式変位検出機構9は、一般に光てこ方式と呼ばれるものであり、光源10に半導体レーザを使用し、光源10から発光されるレーザ光を集光レンズ11で集光し、ビームスプリッター12で入射光13の光路を曲げて測定対象であるカンチレバー部6aの背面に直上(Z方向)から照射する。光源10の光の強度は光源駆動回路21により設定される。
【0046】
カンチレバー6はXY平面に対して傾けられて配置されており、反射光14は入射光13の光軸とは異なる方向に反射される。反射光14はミラー15で曲げられて、光検出器16上に入射する。
【0047】
光の光路はカンチレバー部6aの背面で一旦結像し光検出器16の受光面上では有限の大きさを持ったスポット20を形成するように構成される。光検出器16は、半導体を材料として製作されており、受光面が4分割(A1、A2、B1、B2)された構成となっている。
【0048】
光検出器16に光が入射すると、光検出器16を構成する半導体から電流信号が発生し、光検出器16の後端に設けられた電流/電圧変換回路を備えた増幅器22により、4つの受光面ごとに所定の増幅率で電圧信号に変換される。このときの出力は電圧モニター23で表示される。
【0049】
ここで、カンチレバー部6aがZ方向に撓んだ場合には、光検出器16上のスポット20は受光面上で上下に動作する。したがって4分割された受光面(A1、A2、B1、B2)のうち、上側の2つの受光面の領域A(A1+A2)と、下側の2つの受光面の領域B(B1+B2)に入射する光の強度差A−Bを測定することでカンチレバー部6aのたわみ量を測定することが可能となる。
【0050】
ここで、図2により電流/電圧変換回路を備えた増幅器22の回路構成を説明する。本実施例の光学式変位検出機構では、光検出器16の上側の受光面の領域Aと、下側の受光面の領域Bに入射する光の強度差を測定することでカンチレバー部6aのたわみ量を測定することが可能となる。ここで、各受光面に入射する光の強度をPa1、Pa2、Pb1、Pb2とする。各受光面にPa1、Pa2、Pb1、Pb2の強さの光が入射すると、光検出器16により光信号が電気信号に変換されて、それぞれの受光面A1、A2、B1、B2から電流Ia1、Ia2、Ib1、Ib2が発生する。この電流は、それぞれの受光面に接続されたオペアンプ31と抵抗R1により構成される電流電圧変換回路30により、電圧信号Va1、Va2、Vb1、Vb2に変換される。このとき、電流電圧変換回路30のフィードバック抵抗値をR1とすると、Va1=R1×Ia1、Va2=R1×Ia2、Vb1=R1×Ib1、Vb2=R1×Ib2の関係がある。このように、初段の電流電圧変換回路30では増幅率R1で増幅されて、電流信号が電圧信号に変換される。これらの電圧信号は、加算回路34に入力されて、上側2つの受光面の光量の和Va=Va1+Va2、下側2つの受光面の光量の和Vb=Vb1+Vb2が出力される。これらの信号は、オペアンプ32と抵抗R2,R3により構成される差動増幅回路33に送られて、電圧の差信号Va−bを検出する。ここで、図のようにオペアンプと抵抗値R2、R3で差動増幅器を構成した場合、Va−b=(R3/R2)×(Va−Vb)の関係が成り立ち、差動増幅器により増幅率R3/R2で増幅されて、Va−bが出力される。このVa−bを検出することでカンチレバーのたわみ量を測定することができる。
【0051】
本実施例では、受光感度0.65A/Wの光検出器16を用い、SPMで測定対象を測定する場合、電流電圧変換回路30のフィードバック抵抗値R1は100kΩに設定し。また、差動増幅回路33の抵抗値はR2=10kΩ,R3=20kΩに設定した。
【0052】
すなわち実測定時の増幅率は、初段の電流/電圧変換回路で100000倍、差動増幅器で2倍に設定される。
【0053】
この、A−Bの電圧信号Va−bを制御回路24に送り、あらかじめ設定した動作点と比較して、その差分に応じた信号によりスキャナ駆動回路25からZ微動機構4bを動作させて、サンプル5とプローブ6b間の距離を一定に保つように制御を掛ける。さらに、スキャナ駆動回路25により、XYスキャナ部4aを動作させサンプル5をラスタスキャンさせる。
【0054】
このとき、3軸微動機構4に掛けた電圧信号を表示部26で表示させることで、サンプル5の表面の凹凸像が得られる。
【0055】
ここで、測定前の光学式変位検出機構9の調整方法を述べる。カンチレバー6は消耗品であり、測定の都度交換が必要となる場合がある。また、測定の目的に応じて、材質や形状の異なるカンチレバーの中から最適なものが選択されて使用される。したがって、カンチレバー6の交換の都度、入射光13をカンチレバー部6aの背面に位置合わせし、さらに、反射光14を光検出器16の受光面に位置合わせする必要がある。
【0056】
まず、カンチレバー部6aの背面へのスポット光の位置合わせに際しては、まず、光学顕微鏡29で、カンチレバー6とサンプル5の表面さらにサンプル表面上の入射光13のスポットを観察する。光源10と集光レンズ11から構成される光源モジュール19は、2軸の送りねじ式のステージより構成される光源用位置決め機構17に取り付けられており、この光源用位置決め機構17を動作させることで、入射光13をXY平面で動かすことが可能となる。光学顕微鏡29の像によりカンチレバー6とサンプル5に照射された入射光13のスポットを観察しながら、カンチレバー6aの背面に入射光13のスポットの中心が位置するように正確に位置決めする。
【0057】
次に、光検出器16のスポット光の位置合わせについて説明する。光検出器16にも2軸の送りねじ方式のステージより構成される光検出器用位置決め機構18が取り付けられている。光検出器16の受光面上に反射光のスポット20の位置合わせを行う際には、電圧モニター23の信号を見ながら、まずは4分割された受光面の光量の総和(Pa1+Pa2+Pb1+Pb2)が最大となるように光検出器用位置決め機構18により位置合わせを行う。この状態では、光検出器16の受光面の任意の位置にスポット20が位置決めされている。次にスポット20を4分割された受光面の中心に位置合わせする。そのため、上下の受光面の差(Va1+Va2)−(Vb1+Vb2)の信号を電圧モニター23で観察しながら、信号が概ね0となるように光検出器用位置決め機構18により光検出器16を動かして位置合わせする。これによりスポット20を上下の受光面の中心に位置合わせすることができる。カンチレバー6aのたわみを検出する場合には、ここまでの位置合わせで十分であり、上下2分割の受光面を持つ光検出器でも測定可能であるが、例えばカンチレバー6aのねじれ量を測りプローブ6bの先端とサンプル5表面の摩擦力を測定する摩擦力顕微鏡などの場合には、左右の信号の差(Va1+Vb1)−(Va2+Vb2)によりねじれ量の測定を行うため、左右(紙面に垂直な方向)の受光面の信号の差が0となるように光検出器用位置決め機構18により位置合わせを行う必要がある。
【0058】
ここで、SPMにおいてサンプルの特性を高感度に測定するためには、光検出器16の検出感度(測定対象(ここではカンチレバー6)の単位変位あたりの電圧出力)を高くする必要があるが、検出感度が高い場合には、光検出器16上に反射光のスポット20の位置合わせを行う場合に、光検出器用位置決め機構18をわずかに動かしただけで、上下の受光面の出力差の信号が著しく変動し、光検出器16の受光面の中心へ反射光のスポット20位置合わせを行うことが非常に困難となる。
【0059】
そこで、増幅器22で設定される利得(増幅率)の設定を変えられるように利得(増幅率)調整器27を設け、利得(増幅率)を下げて光検出器16上に反射光14のスポット20の位置合わせを行うようにした。すなわち、式(1)で利得(増幅率)Gを下げることで、検出感度Sを下げて、光検出器用位置決め機構18を動かしても出力電圧の変動が少なくなるように設定した。増幅率を変更するためには、図2の回路の抵抗値R1、R2、R3のいずれかを可変とすることで実現できる。また、差動増幅回路33以降の制御回路24内での電気回路内での調整や信号処理系でのソフトウエアの設定で変更してもよい。
【0060】
この結果、光検出器16へのスポット20の位置合わせが容易に、かつ正確に行うことが可能となった。その結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0061】
光学式変位検出機構9の測定準備が終わった後は利得(増幅率)調整器27の増幅率を元の値に設定することで、検出感度を高くすることで実際にサンプルを高精度で測定を行うことが可能となる。
【実施例2】
【0062】
本発明に係る、本発明に係る第2の実施例の光学式変位検出機構のスポット光の位置合わせ方法を図1により説明する。基本構成は第1の実施例と同じであるため、重複する部分の説明は省略する。この第2の実施例では、光学式変位検出機構9の光源10の光源駆動回路21に、光強度調整器28を取り付けた構造となっている。
【0063】
測定前にカンチレバー部6aの背面への入射光13の位置合わせと、光検出器16の受光面へのスポットの位置合わせを行う場合には、この光強度調整器28により、実測定時よりも光源10の強度を小さくして位置合わせを行う。本実施例では半導体レーザ10を駆動する電流値を下げることで強度を小さくした。
【0064】
まず、カンチレバー部6aの背面への位置合わせを行う場合には、光学顕微鏡29で、カンチレバー6とサンプル5の表面、サンプル表面上の入射光13のスポットを観察する。光源10と集光レンズ11から構成される光源モジュール19は、2軸の送りねじ式のステージより構成される光源用位置決め機構17に取り付けられており、光学顕微鏡像29を観察しながら、この光源用位置決め機構17を動作させ、入射光をXY平面で動かし、カンチレバー部6a背面へ入射光13のスポットの中心に位置するように位置合わせする。このとき光源10の強度が大きいと、サンプル5の表面やカンチレバー部6aの背面で散乱される入射光の散乱光が増大し、光学顕微鏡29の観察像の中で散乱光の強度が強くなり、カンチレバー6や、入射光13のスポットの中心の視認性が著しく悪くなる。したがって、光源10の光量の強度を落とすことで、入射光13の強度が小さくなりその結果、散乱光強度も小さくなり、観察像で散乱光がほとんど観察されなくなってカンチレバー6と入射光13のスポットの視認性が向上し、容易にかつ確実に入射光13をカンチレバー部6aの背面に位置決めすることが可能となる。
【0065】
また、光検出器16の中心に反射光14のスポット20を位置合わせする場合には、スポット20の強度も小さくなるため、式(1)の強度Pを小さくすることができ、第一の実施例と同様に検出感度Sが下がり、検出器用位置決め機構18を動かしても出力電圧の変動が少なくなる。この結果、光検出器へのスポットの位置合わせが容易に、かつ正確に行うことが可能となった。その結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0066】
本実施例においても、光学式変位検出機構9の測定準備が終わった後は光源10の強度を元の値に設定することで、検出感度が位置合わせ調整時よりも高くなり実際にサンプルを高精度で測定を行うことが可能となる。
【実施例3】
【0067】
本発明の第3の実施例を図3に示す。図3はSPMの一種である走査型近接場顕微鏡のプローブとプローブの変位検出用の光学式変位検出機構のスポット光の位置合わせ方法に係わる模式図である。なお、主要部以外の詳細な構成は省略している。
【0068】
本実施例で使用されるプローブ50は光ファイバーの先端を先鋭化し、先端部に開口を設け、開口以外の部分をアルミニウムでコートした構成である。このプローブ50を加振用の圧電素子51が取り付けられたプローブホルダ52に板バネ53で固定し、プローブ50の長軸方向がサンプル54の表面と直交するように配置する。
【0069】
このように配置したプローブ50を、加振用圧電素子51により、サンプル54の表面と平行な方向(図のY軸方向)にプローブ50の共振周波数の近傍で加振する。このときプローブ50の先端とサンプル54の表面を接近させると、サンプル54の表面の吸着層の抵抗力や、摩擦力あるいは原子間力などの力をプローブ先端が受ける。これらの力は総称してシアフォースと呼ばれる。シアフォースを受けるとプローブ50の振幅が減少する。この振幅の減少量はプローブ50の先端とサンプル54の表面の距離に依存する。したがってプローブ50の振幅量や位相の変化を計測しながら、振幅や位相が一定となるようにサンプル54とプローブ50間の距離を制御することで、サンプル54とプローブ50を一定の距離に保つことが可能である。実施例1と同じく、この状態でサンプル54とプローブ50を相対的にラスタスキャンすることでサンプル表面の凹凸像を測定することが可能である。走査型近接場顕微鏡では、プローブ50に光を入射し、プローブ先端の開口部近傍にエバネッセント光を発生させて、サンプル54に照射し、サンプル表面で散乱させて、その散乱光を検出器により検出することで、サンプル54の表面の光学的な特性も同時に測定することが可能である。
【0070】
ここで、本実施例でのプローブ50の振幅量の測定方法を説明する。本実施例の光学式変位検出機構55は、集光レンズと半導体レーザが組み込まれた光源部56と、表面が2分割され半導体を材料とする光検出器57から構成される。光源部56からの光は、真横方向(図のX方向)からプローブ50に照射される。このとき光源部56からの光は結像されるが、プローブ50への照射点はプローブ50ですべての光が遮られない程度に結像点からずれた位置で照射される。
【0071】
プローブ50に照射された光は、一端結像し、その後再び広がって、プローブ50に対して光源部56と対向する位置に配置される光検出器57の面内に有限のスポット58を作製するように入射する。このときスポット58内にはプローブ50で遮られた部分が影となって現れる。
【0072】
プローブ50へのスポット光の位置合わせに際しては、まず、光源部56に設けられた2軸の光源用位置決め機構59で光源部56を動かしてプローブ50に光が当たるように位置合わせする。次に光検出器57側に設けられた1軸の光検出器用位置決め機構60により光検出器57を左右方向(図のY方向)動かして、光検出器57の後ろ側に配置された電流/電圧変換回路を備えた増幅器61の出力を電圧モニター63で観察しながら、光検出器57の概ね中央付近にスポット58が当たるように位置合わせする。
【0073】
このように構成された光学式変位検出機構55においてプローブ50が振動すると、2分割された光検出器57の受光面上の影により遮られていない部分の面積差が変化するため、2つの分割面の光出力の差分を検出することでプローブ50の振幅量あるいは位相を測定することが可能となる。
【0074】
本実施例においても、第1、第2の実施例と同様に、光源56の光強度を光源駆動回路64に設けられた光強度調整器65で調整できるようにしており、プローブ50にレーザ光を照射する場合にレーザの強度を小さくして視認性を向上し、容易にかつ確実に入射光をプローブ50に位置決めすることが可能となる。また、増幅器61には利得(増幅率)調整器62を設けているため、測定感度を下げて、光検出器57へのスポット光の位置合わせを容易に、かつ正確に行うことが可能となる。以上の結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0075】
本実施例でも、光学式変位検出機構55の測定準備が終わった後は増幅率や光源の強度を元の値に設定することで、検出感度が位置合わせ調整時よりも高くなり実際にサンプルを高精度で測定を行うことが可能となる。
【実施例4】
【0076】
図4は本発明の第3の実施例のSPMに用いられる光学式変位検出機構のスポット光の位置合わせ方法に係わる模式図である。本実施例は基本的な構成は図1を用いて第1、第2の実施例で説明した光てこ方式の光学式変位検出機構と同じものであるため、重複する部分の説明は省略する。図1との違いは、光源駆動回路21に光強度調整器を持たず、また増幅器22に利得(増幅率)調整器を設けていない点にある。
【0077】
本実施例では、測定前の光学式変位検出機構9の位置合わせ調整の際に、光源10とカンチレバー6aの間の光路に光の強度を減光させる減光フィルター40を挿入してカンチレバー6aに入射する光の強度を小さくするようにした。この結果、カンチレバー部6a上に入射光13のスポットを位置決めする場合の視認性が向上し、容易にかつ確実に入射光13をカンチレバー部6aの背面に位置決めが可能となる。また、検出感度も下がるため、光検出器16への反射光14のスポットの位置合わせも容易に、かつ正確に行うことが可能である。以上の結果、位置合わせに対する測定準備に要する時間が短縮され、高精度の位置合わせが可能となった。
【0078】
本実施例でも、光学式変位検出機構9の位置合わせ準備が終わった後は、減光フィルター40を光路から外すことで光源10の強度が元の値に戻り、検出感度を位置合わせ調整時よりも高くすることで実際にサンプルを高精度で測定を行うことが可能となる。
【0079】
なお、減光フィルター40はカンチレバー部6aに反射した後の光路上に入れてもよい。この場合、カンチレバー部6aへの入射光13のスポットの位置合わせの視認性に関しては変化がないため、特に光学顕微鏡29で入射光13の強度を落とすと入射光13のスポットが観察しづらいような場合に有利となる。また、検出感度は小さくすることができるため、光検出器16への反射光14のスポットの位置合わせの方は容易に、かつ正確に行うことが可能である。
【0080】
なお、本実施例では、カンチレバー6が圧電素子よりなる加振器41により共振周波数近傍で加振するように構成される、いわゆる振動方式の原子間力顕微鏡とした。本実施例では光学式変位検出機構9によりカンチレバー部6aの振幅や位相を計測しながら、プローブ6bをサンプル5に近接させていくと、原子間力や間欠的な接触量が作用して振幅や位相が変化する。この変化量はプローブ6bとサンプル5の間の距離に依存するため、振幅や位相が一定となるようにプローブ6bとサンプル5の間の距離を制御することでプローブ6bとサンプル5の間距離を一定に保つことが可能となる。
【0081】
以上、本発明の実施例について述べたが、本発明はこれらの実施例に限定されるものではない。例えば、本実施例では受光面が4分割または2分割された半導体製の光検出器を使用したが、受光面を持ち、電圧信号が出力される位置検出素子であれば任意の検出器を適用可能である。例えば、分割面を持たず、受光面上のスポット位置を検出可能な位置検出素子(Position Sensitive Detector:PSD)と呼ばれる半導体素子などが市販されている。
【0082】
また、光学系も本実施例に限定されず、測定対象に光を照射し、測定対象を経由した光を光検出器で受光し、光検出器からの信号により測定対象の変位を測定するものであれば任意の光学式変位検出機構に適用可能である。
【0083】
また、光源も、半導体レーザ(LD)に限定されず、例えば可干渉性が半導体レーザよりも低いスーパールミネッセンスダイオード(SLD)や、白色光源、発光ダイオード(LED)など任意の光源が適用できる。
【0084】
光検出器や光源に設けられる位置決め機構は、手動式、自動式を問わず、任意の機構が使用できる。位置決めの自由度も直交1軸または2軸に限定されず、多軸でもよいし、またあおり機構を用いた場合等も本発明に含まれる。
【0085】
光源の光強度調整器や光検出器側の増幅率調整器も任意の方式のものが使用可能で、例えば、ボリュームツマミを用いて連続的に可変する方法でもよいし、あらかじめ複数の設定値を決めておき、切り替えスイッチにより設定を行う方法でもよい。
【0086】
また、光源の光強度調整に用いられる減光フィルターは光量を可変する目的で用いるものであれば任意のフィルターが使用できる。
【0087】
また、SPMは、実施例で述べたコンタクト方式や振動方式の原子間力顕微鏡や、走査型近接場顕微鏡に限定されず、カンチレバーやプローブを用いて、これらの変位や振幅を検出しながら、プローブとサンプル表面間の距離を制御したり、プローブにかかる力や相互作用を検出することで、サンプル表面の物性を測定するものはすべて本発明に含まれる。また、プローブによりサンプル表面への加工や、サンプル表面の物質のマニピュレーションを行うものなども、すべて本発明に含まれる。また、必ずしもXYスキャナで走査させる必要はなく、Z微動機構を用いて高さ方向の相互作用を検出する場合のみであっても本発明に含まれる。
【0088】
また、本発明の光学式変位検出機構のスポット光の位置合わせ方法は、SPMへの適用に限定されるものではない。例えば、光学式変位検出機構を用いた表面粗さ計、電気化学顕微鏡等の表面情報計測装置や、プローブで試料表面を加工するプローブ加工装置などにも適用することができる。
【符号の説明】
【0089】
1 サンプルホルダ
2 粗動機構
4 3軸微動機構
5、54 サンプル
6 カンチレバー(測定対象)
6a カンチレバー部
6b プローブ
9、55 光学式変位検出機構
10、56 光源
16、57 光検出器
17、59 光源用位置決め機構
18、60 光検出器用位置決め機構
19 光源ユニット
21、64 光源駆動回路
22、61 増幅器
23、63 電圧モニター
27、62 利得(増幅率)調整器
28、65 光強度調整器
29 光学顕微鏡
30 電流/電圧変換回路
33 差動増幅回路
34 加算回路
40 減光フィルター
50 プローブ
201 走査型プローブ顕微鏡
205 アーム
207 カンチレバー
209 プローブ
211 サンプル
212 サンプルステージ
213 3軸微動機構(スキャナ)
221 光源
231 入射光
233 反射光
235 光検出器
【特許請求の範囲】
【請求項1】
測定対象に光を照射する光源と、
前記光源を駆動する光源駆動回路と、
前記光源から測定対象に照射した後の光を受光し光強度を検出する光検出器と、
前記光検出器の所定の位置にスポット光を調整する光検出器用位置決め機構と、
前記光検出器の検出信号の利得を調整する利得調整器を有し、所定の利得への増幅および調整を行なう増幅器と、を備えた光学式変位検出機構のスポット光の位置合わせ方法であって、
前記測定対象を前記光学式変位検出機構で実際に測定する前に、前記光検出器での検出感度を低減させて、前記スポット光を前記光検出器用位置決め機構により前記光検出器の所定の位置に調整することを特徴とする光学式変位検出機構のスポット光の位置合わせ方法。
【請求項2】
前記検出感度の低減が、前記検出信号の利得を前記利得調整器により実測定時の利得よりも小さな値に調整するものである請求項1に記載の光学式変位検出機構のスポット光の位置合わせ方法。
【請求項3】
前記検出感度の低減が、前記光源と前記カンチレバーの間または前記カンチレバーと前記光検出器の間のいずれかの光路上に減光フィルターを設けて、光の強度を低下させることにより行なうものである請求項1に記載の光学式変位検出機構のスポット光の位置合わせ方法。
【請求項4】
請求項1乃至3のいずれかに記載の光学式変位検出機構のスポット光の位置合わせ方法を採用したことを特徴とする走査型プローブ顕微鏡。
【請求項5】
請求項4に記載の走査型プローブ顕微鏡において、
前記光学式変位検出機構が、光源からの光をカンチレバー背面または任意の形状のプローブに受けて、その前記カンチレバーからの反射光を4分割または2分割された受光面にて受光する、または、前記プローブの影を4分割または2分割された受光面上に投影するものであって、
実測定前に前記分割された受光面の中心付近に前記反射光または前記影を位置合わせするものである走査型プローブ顕微鏡。
【請求項1】
測定対象に光を照射する光源と、
前記光源を駆動する光源駆動回路と、
前記光源から測定対象に照射した後の光を受光し光強度を検出する光検出器と、
前記光検出器の所定の位置にスポット光を調整する光検出器用位置決め機構と、
前記光検出器の検出信号の利得を調整する利得調整器を有し、所定の利得への増幅および調整を行なう増幅器と、を備えた光学式変位検出機構のスポット光の位置合わせ方法であって、
前記測定対象を前記光学式変位検出機構で実際に測定する前に、前記光検出器での検出感度を低減させて、前記スポット光を前記光検出器用位置決め機構により前記光検出器の所定の位置に調整することを特徴とする光学式変位検出機構のスポット光の位置合わせ方法。
【請求項2】
前記検出感度の低減が、前記検出信号の利得を前記利得調整器により実測定時の利得よりも小さな値に調整するものである請求項1に記載の光学式変位検出機構のスポット光の位置合わせ方法。
【請求項3】
前記検出感度の低減が、前記光源と前記カンチレバーの間または前記カンチレバーと前記光検出器の間のいずれかの光路上に減光フィルターを設けて、光の強度を低下させることにより行なうものである請求項1に記載の光学式変位検出機構のスポット光の位置合わせ方法。
【請求項4】
請求項1乃至3のいずれかに記載の光学式変位検出機構のスポット光の位置合わせ方法を採用したことを特徴とする走査型プローブ顕微鏡。
【請求項5】
請求項4に記載の走査型プローブ顕微鏡において、
前記光学式変位検出機構が、光源からの光をカンチレバー背面または任意の形状のプローブに受けて、その前記カンチレバーからの反射光を4分割または2分割された受光面にて受光する、または、前記プローブの影を4分割または2分割された受光面上に投影するものであって、
実測定前に前記分割された受光面の中心付近に前記反射光または前記影を位置合わせするものである走査型プローブ顕微鏡。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−227097(P2011−227097A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2011−170479(P2011−170479)
【出願日】平成23年8月3日(2011.8.3)
【分割の表示】特願2006−229011(P2006−229011)の分割
【原出願日】平成18年8月25日(2006.8.25)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成23年8月3日(2011.8.3)
【分割の表示】特願2006−229011(P2006−229011)の分割
【原出願日】平成18年8月25日(2006.8.25)
【出願人】(503460323)エスアイアイ・ナノテクノロジー株式会社 (330)
【Fターム(参考)】
[ Back to top ]