
光学式胴割選別機
【課題】原料米粒に混入した胴割粒を光学的に判別する際に、胚芽部分や肌ずれ部分によって亀裂部分を有さない正常粒を胴割粒と誤判別することのない光学式胴割選別機を提供する。
【解決手段】胴割判別手段18における判別部において、光学検出手段6のCCDカメラに内蔵した第1CCDセンサが受光した米粒の透過光を基に第1の米粒画像(胚芽部分及び肌ずれ部分あり)を得るとともに、前記CCDカメラに内蔵した第2CCDセンサが受光した米粒の透過光を基に第2の米粒画像(胴割部分、胚芽部分及び肌ずれ部分あり)を得て、この両者の米粒画像の光量差を演算することにより、亀裂部分だけの画像を取得し、胴割粒を判別する。よって、胚芽部分及び肌ずれ部分による悪影響を受けることなく胴割粒の判別が正確に行えるようになり、かつ、製品歩留まりが向上する。
【解決手段】胴割判別手段18における判別部において、光学検出手段6のCCDカメラに内蔵した第1CCDセンサが受光した米粒の透過光を基に第1の米粒画像(胚芽部分及び肌ずれ部分あり)を得るとともに、前記CCDカメラに内蔵した第2CCDセンサが受光した米粒の透過光を基に第2の米粒画像(胴割部分、胚芽部分及び肌ずれ部分あり)を得て、この両者の米粒画像の光量差を演算することにより、亀裂部分だけの画像を取得し、胴割粒を判別する。よって、胚芽部分及び肌ずれ部分による悪影響を受けることなく胴割粒の判別が正確に行えるようになり、かつ、製品歩留まりが向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、玄米や精白米などの原料米粒中に含まれる胴割粒を光学的に判別して選別する光学式胴割選別機に関するものである。
【背景技術】
【0002】
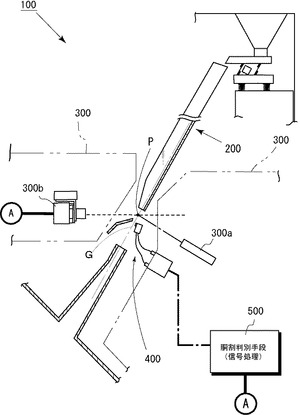
従来、前記原料米粒中に含まれる、内部に亀裂を有する米粒(以下、「胴割粒」という)を光学的に判別して選別する前記光学式胴割選別機は、公知であり、例えば、特許文献1や特許文献2によって開示されている。この光学式胴割選別機100は、例えば図10に示すように、原料米粒を下方に流下移送させる傾斜シュート200を構成するとともに、該傾斜シュート200の下端部近傍における原料米粒の落下軌跡Gに沿った位置に、光学検出手段300及び選別手段400を配設している。前記光学検出手段300は、前記落下軌跡Gの一方側に配設し、落下軌跡Gにおける光学検出位置Pに対してライン状のレーザー光を照射する照射部300aと、他方側に配設し、前記光学検出位置Pにおける光を検出するCCDカメラ300bとを有する。このように構成された光学式胴割選別機100は、原料米粒を前記傾斜シュート200によって流下させ、該原料米粒が落下軌跡Gの光学検出位置Pを通過する際に、前記光学検出手段300により、各米粒にレーザー光を照射してその透過光をCCDカメラ300bで受光し、検出した受光データを基に別途設けられた胴割判別手段500によって信号処理して胴割粒を特定し、特定した胴割粒を前記選別手段400によって選別するものであった。
【0003】
【特許文献1】特開2005−265519号公報
【特許文献2】特許第3642172号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、前記光学式胴割選別機100には、以下の問題点があった。前記胴割判別手段500は、前記受光データに基づいて各米粒の全体像(全体画像)を特定し、特定した各米粒の全体像の中に亀裂部分に該当する線状の暗い影のデータ部分を検出すると胴割粒と判別している。しかしながら、米粒には、胚芽部分があり、また、表面に肌ずれ(傷)が入っていることもあるため、この胚芽部分や肌ずれ部分が胴割判別する際に判別精度に悪影響を及ぼしていることが分かった。すなわち、胚芽部分や肌ずれ部分が米粒にあると、これらの部分も亀裂部分と同じように暗い影として現れるため、この暗い影部分によって亀裂を有さない正常粒であっても胴割粒として誤判別して選別しまい、製品歩留まりが低下する要因になっていた。
そこで、本発明は上記問題点にかんがみ、胴割判別する際に、胚芽部分や肌ずれ部分によって亀裂部分を有さない正常粒を胴割粒と誤判別することのない光学式胴割選別機を提供することを技術的課題とするものである。
【課題を解決するための手段】
【0005】
上記課題を解決するため、請求項1により、
原料の各米粒を整列させて移送する移送手段と、
該移送手段から放出された前記米粒の落下軌跡における光学検出位置に対して横一線状の光を照射する照射部及び前記光学検出位置を通過する各米粒からの透過光を検出するCCDセンサを備えたCCDカメラを設けて光学検出する光学検出手段と、
該光学検出手段が検出した透過光に基づいて各米粒における亀裂の有無を検出して胴割粒を判別する胴割判別手段と、
該胴割判別手段が判別した胴割粒を選別する選別手段と、
を有する光学式胴割選別機において、
前記CCDカメラは、該CCDカメラの光軸が前記落下軌跡の光学検出位置においてほぼ直角に交差する位置に配設するとともに、異なる複数の色の光を個別に受光する第1CCDセンサ及び第2CCDセンサを備えるものとし、
前記照射部は、600nm〜710nmの赤色光、500nm〜580nmの緑色光及び420nm〜520nmの青色光の中から互いに異なる色の光を照射する第一色照射部と第二色照射部とを備え、前記第一色照射部は、前記光学検出位置を通過した前記CCDカメラの光軸上に一つ配設するか、又は前記CCDカメラの光軸を挟んだ一方側と他方側に前記光学検出位置を照射する各光軸と前記CCDカメラの光軸とがなす内角度が略同一となる位置に一方照射部と他方照射部とを個別に配設し、前記第二色照射部は、前記CCDカメラの光軸と重合しない位置に配設し、
前記胴割判別手段は、前記第1CCDセンサが検出した透過光から第1の米粒画像を作成するとともに、前記第2CCDセンサが検出した透過光から第2の米粒画像を作成し、前記第1の米粒画像と第2の米粒画像との光量差を演算して米粒における亀裂部分を特定して胴割粒を判別する判別部を設けた、
という技術的手段を講じた。
【発明の効果】
【0006】
本発明による光学式胴割選別機によれば、胴割判別手段に設けた判別部により、CCDカメラに内蔵した第1CCDセンサが検出した透過光に基づいて亀裂部分、胚芽部分及び肌ずれ部分が現れた第1の米粒画像を形成するとともに、前記CCDカメラに内蔵した第2CCDセンサが検出した透過光に基づいて胚芽部分と肌ずれ部分が現れて亀裂部分が現れない第2の米粒画像とを形成し、この両画像の光量差を演算することによって胚芽部分及び肌ずれ部分の画像を打ち消して亀裂部分だけの亀裂画像を取得(特定)し、該亀裂画像に基づいて胴割粒か否かを判別するので、胴割粒を判別する際に、胚芽部分及び肌ずれ部分の画像による影響を受けて亀裂部分を有さない正常粒を誤って胴割粒と判別することがなくなる。よって、胴割粒を正確に選別することができるようになり、製品歩留まりが向上する。
【発明を実施するための最良の形態】
【0007】
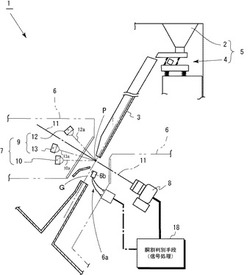
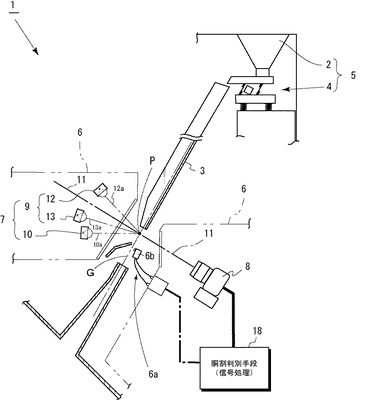
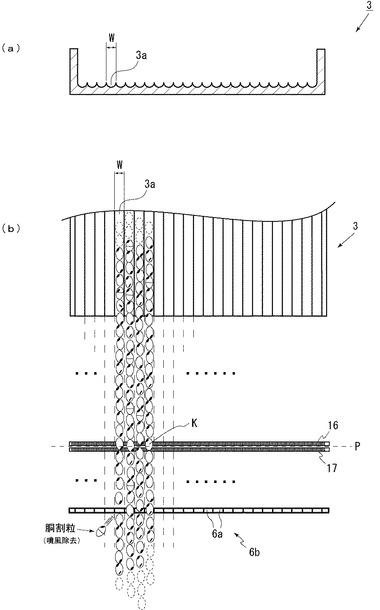
図1は、本発明における光学式胴割選別機1の縦側断面図である。図2はその要部拡大図である。前記光学式胴割選別機1は、原料米粒Kを貯留する原料タンク2と、該原料タンク2から排出された原料米粒を後述する傾斜シュート3に順次送り出す振動フィーダ4と、下方傾斜させた前記傾斜シュート3とからなる移送手段5を構成する。本実施例においては、前記傾斜シュート3の下方傾斜角度は45度とした。前記傾斜シュート3の傾斜面には流下方向に沿って溝3aを複数隣接して構成し、各原料米粒Kを、米粒の長さ方向に整列させて流下させるようにしてある(図3(a)参照)。本実施例においては、前記溝3aの幅Wは、米粒Kの幅寸法に相当する、3.3ミリメートルとした。前記傾斜シュート3の下端部近傍には、米粒の落下軌跡Gに沿った位置に、光学検出手段6と選別手段6aを順次配設する。
【0008】
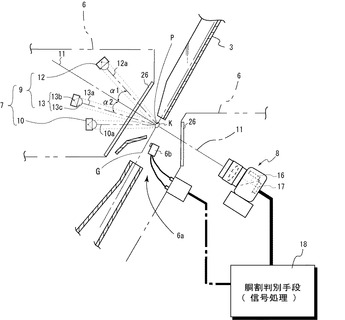
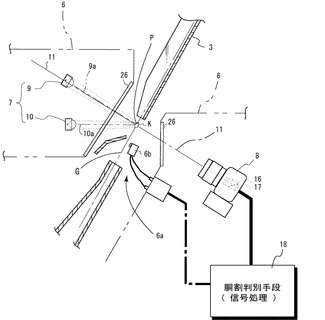
前記光学検出手段6は、前記落下軌跡G上における光学検出位置Pを中心として、その一方側に照射部7を構成し、他方側にCCDカメラ8を構成する(図2参照)。前記照射部7は、前記光学検出位置Pに第一色の光(本実施例では緑色光)を照射する第一色照射部9と、該第一色照射部9とは異なる色の光(本実施例では赤色光)を照射する第二色照射部10と構成する。前記第一色照射部9は、前記CCDカメラ8の光軸11を挟み、その一方側に設けた一方照射部12と他方側に設けた他方照射部13とから構成する。前記一方照射部12及び他方照射部13は、該一方照射部12の光軸(光路)12aと前記CCDカメラ8の光軸11とがなす内角度α1と、該他方照射部13の光軸(光路)13aと前記CCDカメラ8の光軸11とがなす内角度α2とが略同一角度になる位置にそれぞれ配設する。本実施例においては、前記内角度α1及び内角度α2は共に25度とした。なお、前記内角度α1,α2において、前記CCDカメラ8や照射部7の組み付け誤差によって前記内角度α1,α2が多少異なったとしても、両角度は前記略同一角度の範囲に含まれる。一方、前記第二色照射部10については、配設する位置を、当該第二色照射部10の照射光の光軸10aが前記CCDカメラ8の光軸11と重合しない位置とする。なお、前記CCDは、「Charge Coupled Devices」の略である。
【0009】
前記第一色照射部9である一方照射部12及び他方照射部13、並びに、前記第二色照射部10は、それぞれ、前記光学検出位置Pに対して指向性のある光を照射できるものとする。例えば、ラインレーザー発光器を用いてもよいが、より好ましくは、左右方向の照射光のばらつきが少ないLED(発光ダイオード)を用いるのがよい。LEDを使用する場合にはそれぞれ、図2に示すようにLED素子13bと集光レンズ13cとから構成し、LED素子13bが放った光が前記集光レンズ13cによって図2に示す破線のように集光されて光学検出位置Pに対して横一線状に照射されるようにする。
【0010】
LEDを用いた前記第一色照射部9は、500nm〜580nmの緑色光を用い、本実施例で用いたLED素子は中心波長を520nmで半値幅が50mmのものを使用した。また、同じくLEDを用いた前記第二色照射部10は、600nm〜710nmの赤色光を用い、本実施例で用いたLED素子は中心波長を630nmで半値幅が18mmのものを使用した。なお、本発明において前記第一色照射部9と第二色照射部10とは、前述のように異なる色の光が照射できるようにすればよく、このため上記実施例のように緑色光と赤色光の組合せ以外に、400nm〜520nmの青色光と組み合わせるようにしてもよい。なお、前記第一色照射部9と第二色照射部10の光量調整については、後述する。
【0011】
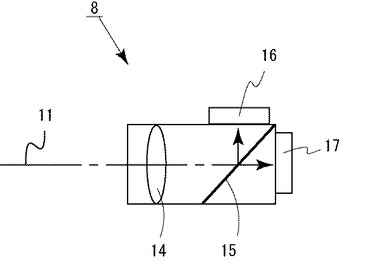
前記CCDカメラ8の内部には、図2及び図4に示したように、入光方向から順に、レンズ14、ダイクロイックプリズム(分光手段)15、カラーCCDラインセンサ(第1CCDセンサ)16及びカラーCCDラインセンサ(第2CCDセンサ)17が配設してある。また、前記カラーCCDラインセンサ16には、前記光学検出位置Pの米粒Kから検出した透過光が前記ダイクロイックプリズム(分光手段)15の分光作用によって赤色の透過光が検出され、一方、カラーCCDラインセンサ17には同じくダイクロイックプリズム15の分光作用によって緑色の透過光が検出されるようにしてある。これらの前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17はそれぞれ前記胴割判別手段18に接続してあり、検出した透過光のデータ(電気信号)が送られるようになっている。
【0012】
前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17は、図3(b)に概念的に示したように、ライン状(横一列状)に連接した複数の受光素子から構成され、前記傾斜シュート3の複数の各溝(チャンネル)3aごとに受光素子を複数個ずつ割り当て、各溝(チャンネル)3aから落下する米粒Kからの透過光を受光することができるようにしてある。また、前記レンズ14、ダイクロイックプリズム15、カラーCCDラインセンサ16及びカラーCCDラインセンサ17らを一体型にすることにより、同一の米粒Kから検出した2色光(2波長)の透過光に基づいて米粒画像を形成する際に互いの米粒画像にズレが生じない。
【0013】
前記選別手段6aは、本実施例においては、高圧エアーを空気銃のように噴風させる高圧空気噴風手段6aとしたが、これ以外に、ソレノイドを使った板ばね式のものを使用してもよい。前記高圧空気噴風手段6aは、前記光学検出位置Pよりも下方位置の落下軌跡Gに向かって高圧エアーを噴風するように、前記各溝(チャンネル)3aごとに一つの噴風口6cを配設した複数の噴風口6cが連接してなるノズル6bを備える(図3(b))。該ノズル6bの各噴風口6cは管路を介してそれぞれの電磁弁と接続し、該各電磁弁は高圧エアー源と連通している。前記各電磁弁は前記エジェクタバルブ駆動手段25と接続し、該エジェクタバルブ駆動手段25からの噴風信号を受けて瞬間的に弁の開閉を行う。これにより、空気銃のような高圧エアーが瞬間的に噴風されて不良粒が落下軌跡Gから除去されて選別される。
【0014】
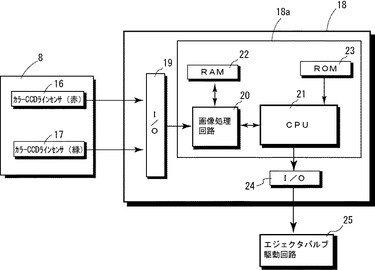
前記胴割判別手段18は、図5に示すように、前記CCDカメラ8に内蔵した前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17のそれぞれに接続した入出力回路(I/O)19と、該入出力回路(I/O)19に接続した画像処理回路20と、該画像処理回路20に接続した中央演算部(CPU)21及び読み出し書き込み用記憶部(RAM)22と、前記中央演算部21に接続した読み出し専用記憶部(ROM)23及び入出力回路(I/O)24とから構成する。また、前記入出力回路24は、エジェクタバルブ駆動手段25に接続する。本実施例において、判別部18aとは、前記画像処理回路20、中央演算部21、読み出し書き込み用記憶部22及び読み出し専用記憶部23を指す。
【0015】
次に、本発明の作用を説明する。原料米粒Kは、前記移送手段5である振動フィーダ4の振動作用によって原料タンク2から、順次、傾斜シュート3の上流側に供給される。該傾斜シュート3に供給された各原料米粒Kは、前記溝3aに入り、米粒の向き(姿勢)をその長さ方向に整列させながら流下して終端部から放出される。放出された各原料米粒Kは、前記落下軌跡Gに沿って前記姿勢の状態で落下し、光学検出位置Pを通過する際に、常時点灯される、前記第一色照射部9からの緑色光と第二色照射部10からの赤色光とが照射される。
【0016】
前記CCDカメラ8は、前記光学検出位置Pにおいて緑色と赤色の照射光を受けた各米粒Kからの透過光を検出する。該透過光は、前記CCDカメラ8のレンズ14を通過した後にダイクロイックプリズム15によって緑色光と赤色光とに分光され、緑色の透過光はカラーCCDラインセンサ17によって走査(受光)され、また、赤色の透過光はカラーCCDラインセンサ16によって走査(受光)される。
【0017】
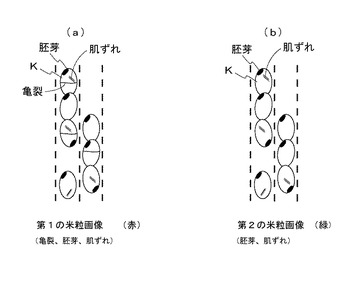
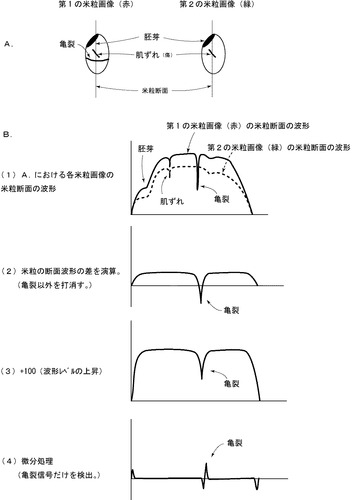
前記カラーCCDラインセンサ16が走査した受光信号(赤)は、順次、胴割判別手段18の前記I/O19を介して画像処理回路20に送られ、該画像処理回路20は、順次検出された赤色の透過光に基づいて、前記光学検出位置P(横一線上)における米粒イメージ(画像)を形成する。この赤色の透過光に基づいて作成された各米粒イメージ(画像)は、米粒の全体形状の中に亀裂部分、胚芽部分及び肌ずれ部分の各画像が現れた、図6(a)に示した第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分あり)となる。この第1の米粒画像は順次前記RAM22に記憶する。
【0018】
一方、前記カラーCCDラインセンサ17が走査した受光信号(緑)も同様に、順次、前記I/O19を介して胴割判別手段18における画像処理回路20に送られ、該画像処理回路20は、順次検出された緑色の透過光に基づいて、前記光学検出位置P(横一線上)における米粒イメージ(画像)を形成する。前記緑色の透過光に基づいて各米粒イメージ(画像)は、図6(b)に示すように、米粒の全体形状の中に、亀裂部分が現れないで、胚芽部分と肌ずれ部分のみの画像が現れる第2の米粒画像(図6(b)参照)となる。
【0019】
このように、第2の米粒画像において亀裂部分が現れない(検出されない)のは、前記一方照射部12及び他方照射部13からの照射光が、CCDカメラ8の光軸11を中心に前記光学検出位置Pの米粒(胴割粒)Kに対して同じ角度(前記内角度α1=内角度α2)から当たり、亀裂部分で光が屈折して生じる暗い影が互いに打ち消し合うためであり、一方、これが米粒(胴割粒)Kに対して一方の斜め方向のみから光を照射した場合には、亀裂部分で光が屈折して米粒表面に暗い影が現れる。前記内角度α1,α2については、70度以下であれば同様の効果が得られる。前記内角度が70度を超えると、亀裂部分の暗い影が強調されて打ち消しが不完全になり、また、肌ずれ部分や胚芽部分の検出精度も低下する等の不具合が生じる。なお、前記第2の米粒画像2(図6(b))は順次前記RAM22に記憶する。
【0020】
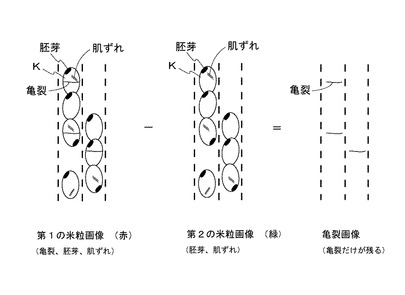
次に、前記RAM22から上記第1の米粒画像及び第2の米粒画像を読み出し、第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分)の光量から第2の米粒画像(胚芽部分及び肌ずれ部分のみ)の光量を差し引く引算処理を行う(図7)。この引算処理により、胚芽部分及び肌ずれ部分はともに打ち消されてキャンセルされるため、得られた画像には亀裂部分のみが残ることになる。これによって、胴割部分だけの亀裂画像を取り出すことができる(亀裂画像参照)。
【0021】
なお、前記第一色照射部9と第二色照射部10の光量は、前記図7に示したように引算処理により、第1の米粒画像と第2の米粒画像の間で、胚芽部分の画像(光量)、肌ずれ部分の画像(光量)及び米粒輪郭が互いに打ち消されてできるだけ画像に残らないようにして、亀裂画像だけが残るように予め調整しておく必要がある。万一、胚芽部分の画像(光量)、肌ずれ部分の画像(光量)及び米粒輪郭の画像が薄っすら残った場合には、例えば、亀裂画像の光量と区別するしきい値によってニ値化処理を行い、亀裂画像だけを明確にすればよい。
【0022】
図8を参照にし、上記図7に示した前記引算処理について更に詳しく説明する。説明の便宜上、図8のA.に示した、上記第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分)及び第2の米粒画像(胚芽部分及び肌ずれ部分のみ)の各米粒断面(連続した撮像データの列)における光量(波形)をグラフにとり、この光量(波形)を使って前記引算処理を具体的に説明する。まず、図8のB.(1)には、前記上記第1の米粒画像及び第2の米粒画像の各米粒断面における前記光量(波形)を示し、図示のように波形中に亀裂部分、胚芽部分及び肌ずれ部分が検出されている。次に、上記(1)に示した二つの波形の差を演算し、この結果、図8のB.(2)に示した波形が得られる。これにより、互いの米粒画像における胚芽部分と肌ずれ部分とが互いに打ち消し合い亀裂部分に相当する落ち込み波形が検出される。次に、上記(2)に示した亀裂部分の波形レベルをマイナス域からプラス域に上昇させる処理を行い、この処理による波形を図8のB.(3)に示す。さらに、上記(3)に示した波形を微分処理して亀裂部分の波形を明確にする処理を行い、この処理による波形を図8のB.(4)に示す。このようにして、上記第1の米粒画像と第2の米粒画像における光量の引算処理を各米粒断面(連続した撮像データの列)単位で行い、亀裂画像だけを残す。
【0023】
次いで、前記CPU21は、前述のようにして残された亀裂画像の画素数をカウントする。カウント数は前記ROM23に予め設定した胴割判別用のしきい値、すなわち、胴割部分と判定するための連続した画素数と対比し、対比結果が、しきい値以上であれば胴割粒と判定(特定)する。一方、カウント数が前記しきい値未満であれば、前記胴割部分をキャンセルし、これを胴割粒と判定しない。
【0024】
次いで、胴割粒が特定されると、前記CPU21はI/O24を介して前記エジェクタバルブ駆動回路25に信号を出力し、前記エジェクタバルブ駆動回路25は、当該胴割粒を検出した前記各溝(チャンネル)3aに対応した前記高圧空気噴風手段6aにおける電磁弁に所定の遅延時間を置いて噴風信号を出して前記電磁弁を作動させ、これに対応したノズル6bの噴風口6cから噴風(空気銃)によって前記落下軌跡Gから胴割粒を選別する。このとき、胴割粒における中心位置等を公知の方法(例えば、特許第3722354号公報など)によって検出し、検出した中心位置に対応する電磁弁に信号を出力して胴割粒の中心位置を噴風し、より確実に胴割粒を選別するようにしてもよい。
【0025】
以上のように本発明によれば、米粒に、亀裂部分のほかに胚芽部分や肌ずれ部分があっても、胚芽部分や肌ずれ部分の画像をキャンセルして亀裂部分だけの亀裂画像を得ることができるので、胴割粒の判別を行う際に、胚芽部分や肌ずれ部分の画像によって亀裂部分を有さない正常粒を誤って胴割粒と判別することがなくなる。よって、胴割粒を正確に判別して選別することができるようになり、製品歩留まりが向上する。
【0026】
なお、上記実施例において、前記第一色照射部9は一方照射部12及び他方照射部13の二つによって構成したが、一つで構成してもよい(図9参照)。前記第一色照射部9を一つで構成する場合には、前記内角度を0(ゼロ)度とし、前記第一色照射部9の照射光軸9aが、前記CCDカメラ8の光軸11と重合する位置に配設する必要がある。これにより、上記本発明と同じ作用効果が得られる。
【0027】
また、本発明において、胚芽部分や肌ずれ部分の画像を引算処理によってキャンセルして亀裂部分の画像を得る際に、上記実施例においては、第1の米粒画像1から第2の米粒画像を差し引いたが、これを逆に、第2の米粒画像から第1の米粒画像を差し引いて亀裂部分の亀裂画像を取得するようにしてもよい。
【0028】
さらに、上記実施例において、CCDセンサは、カラーCCDラインセンサ17及びカラーCCDラインセンサ16の二つから構成するようにしたが、一つにすることもできる。そのためには、カラーCCDラインセンサにおける隣接した受光素子に、例えば、緑色の光を通すフィルターと赤色の光を通すフィルターとを交互に装着するようにして、各色の受光に基づいて前記第1の米粒画像1及び第2の米粒画像を作成することもできる。
【0029】
また、本発明の変形例としては、前記第一色照射部9と第二色照射部10とを交互点灯するようにし、受光センサ(CCDセンサ)を一色の光(一波長)で構成し、各点灯による光をそれぞれ受光し、この受光データに基づいて前記第1の米粒画像1及び第2の米粒画像を作成することもできる。
【図面の簡単な説明】
【0030】
【図1】本発明の光学式胴割選別機の縦側断面図
【図2】同光学式胴割選別機の要部拡大図
【図3】同光学式胴割選別機の傾斜シュートの断面図
【図4】同光学式胴割選別機のCCDカメラ内の概略構成
【図5】同光学式胴割選別機の胴割判別手段のブロック図
【図6】同光学式胴割選別機の作用における第1の米粒画像と第2の米粒画像
【図7】同光学式胴割選別機の作用における第1の米粒画像と第2の米粒画像との引算処理
【図8】前記引算処理の詳細な説明図
【図9】本発明の第一色照射部における変形例
【図10】従来の光学式胴割選別機の縦側断面図
【符号の説明】
【0031】
1 光学式胴割選別機
2 原料タンク
3 傾斜シュート
3a 溝
4 振動フィーダ
5 移送手段
6 光学検出手段
6a 選別手段
6b ノズル
6c 噴風口
7 照射部
8 CCDカメラ
9 第一色照射部
9a 照射光軸(光路)
10 第二色照射部
10a 照射光軸(光路)
11 透過光軸
12 一方照射部
12a 照射光軸(光路)
13 他方照射部
13a 照射光軸(光路)
13b LED素子
13c 集光レンズ
14 レンズ
15 ダイクロイックプリズム(分光手段)
16 カラーCCDラインセンサ(第1CCDセンサ)
17 カラーCCDラインセンサ(第2CCDセンサ)
18 胴割判別手段
18a 判別部
19 入出力回路(I/O)
20 画像処理回路
21 中央演算部(CPU)
22 読み出し書き込み用記憶部(RAM)
23 読み出し専用記憶部(ROM)
24 入出力回路(I/O)
25 エジェクタバルブ駆動回路
26 透明板
100 光学式胴割選別機
200 傾斜シュート
300 光学検出手段
300a 照射部
300b 受光部
400 選別手段
500 胴割判別手段
K 米粒
P 光学検出位置
【技術分野】
【0001】
本発明は、玄米や精白米などの原料米粒中に含まれる胴割粒を光学的に判別して選別する光学式胴割選別機に関するものである。
【背景技術】
【0002】
従来、前記原料米粒中に含まれる、内部に亀裂を有する米粒(以下、「胴割粒」という)を光学的に判別して選別する前記光学式胴割選別機は、公知であり、例えば、特許文献1や特許文献2によって開示されている。この光学式胴割選別機100は、例えば図10に示すように、原料米粒を下方に流下移送させる傾斜シュート200を構成するとともに、該傾斜シュート200の下端部近傍における原料米粒の落下軌跡Gに沿った位置に、光学検出手段300及び選別手段400を配設している。前記光学検出手段300は、前記落下軌跡Gの一方側に配設し、落下軌跡Gにおける光学検出位置Pに対してライン状のレーザー光を照射する照射部300aと、他方側に配設し、前記光学検出位置Pにおける光を検出するCCDカメラ300bとを有する。このように構成された光学式胴割選別機100は、原料米粒を前記傾斜シュート200によって流下させ、該原料米粒が落下軌跡Gの光学検出位置Pを通過する際に、前記光学検出手段300により、各米粒にレーザー光を照射してその透過光をCCDカメラ300bで受光し、検出した受光データを基に別途設けられた胴割判別手段500によって信号処理して胴割粒を特定し、特定した胴割粒を前記選別手段400によって選別するものであった。
【0003】
【特許文献1】特開2005−265519号公報
【特許文献2】特許第3642172号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、前記光学式胴割選別機100には、以下の問題点があった。前記胴割判別手段500は、前記受光データに基づいて各米粒の全体像(全体画像)を特定し、特定した各米粒の全体像の中に亀裂部分に該当する線状の暗い影のデータ部分を検出すると胴割粒と判別している。しかしながら、米粒には、胚芽部分があり、また、表面に肌ずれ(傷)が入っていることもあるため、この胚芽部分や肌ずれ部分が胴割判別する際に判別精度に悪影響を及ぼしていることが分かった。すなわち、胚芽部分や肌ずれ部分が米粒にあると、これらの部分も亀裂部分と同じように暗い影として現れるため、この暗い影部分によって亀裂を有さない正常粒であっても胴割粒として誤判別して選別しまい、製品歩留まりが低下する要因になっていた。
そこで、本発明は上記問題点にかんがみ、胴割判別する際に、胚芽部分や肌ずれ部分によって亀裂部分を有さない正常粒を胴割粒と誤判別することのない光学式胴割選別機を提供することを技術的課題とするものである。
【課題を解決するための手段】
【0005】
上記課題を解決するため、請求項1により、
原料の各米粒を整列させて移送する移送手段と、
該移送手段から放出された前記米粒の落下軌跡における光学検出位置に対して横一線状の光を照射する照射部及び前記光学検出位置を通過する各米粒からの透過光を検出するCCDセンサを備えたCCDカメラを設けて光学検出する光学検出手段と、
該光学検出手段が検出した透過光に基づいて各米粒における亀裂の有無を検出して胴割粒を判別する胴割判別手段と、
該胴割判別手段が判別した胴割粒を選別する選別手段と、
を有する光学式胴割選別機において、
前記CCDカメラは、該CCDカメラの光軸が前記落下軌跡の光学検出位置においてほぼ直角に交差する位置に配設するとともに、異なる複数の色の光を個別に受光する第1CCDセンサ及び第2CCDセンサを備えるものとし、
前記照射部は、600nm〜710nmの赤色光、500nm〜580nmの緑色光及び420nm〜520nmの青色光の中から互いに異なる色の光を照射する第一色照射部と第二色照射部とを備え、前記第一色照射部は、前記光学検出位置を通過した前記CCDカメラの光軸上に一つ配設するか、又は前記CCDカメラの光軸を挟んだ一方側と他方側に前記光学検出位置を照射する各光軸と前記CCDカメラの光軸とがなす内角度が略同一となる位置に一方照射部と他方照射部とを個別に配設し、前記第二色照射部は、前記CCDカメラの光軸と重合しない位置に配設し、
前記胴割判別手段は、前記第1CCDセンサが検出した透過光から第1の米粒画像を作成するとともに、前記第2CCDセンサが検出した透過光から第2の米粒画像を作成し、前記第1の米粒画像と第2の米粒画像との光量差を演算して米粒における亀裂部分を特定して胴割粒を判別する判別部を設けた、
という技術的手段を講じた。
【発明の効果】
【0006】
本発明による光学式胴割選別機によれば、胴割判別手段に設けた判別部により、CCDカメラに内蔵した第1CCDセンサが検出した透過光に基づいて亀裂部分、胚芽部分及び肌ずれ部分が現れた第1の米粒画像を形成するとともに、前記CCDカメラに内蔵した第2CCDセンサが検出した透過光に基づいて胚芽部分と肌ずれ部分が現れて亀裂部分が現れない第2の米粒画像とを形成し、この両画像の光量差を演算することによって胚芽部分及び肌ずれ部分の画像を打ち消して亀裂部分だけの亀裂画像を取得(特定)し、該亀裂画像に基づいて胴割粒か否かを判別するので、胴割粒を判別する際に、胚芽部分及び肌ずれ部分の画像による影響を受けて亀裂部分を有さない正常粒を誤って胴割粒と判別することがなくなる。よって、胴割粒を正確に選別することができるようになり、製品歩留まりが向上する。
【発明を実施するための最良の形態】
【0007】
図1は、本発明における光学式胴割選別機1の縦側断面図である。図2はその要部拡大図である。前記光学式胴割選別機1は、原料米粒Kを貯留する原料タンク2と、該原料タンク2から排出された原料米粒を後述する傾斜シュート3に順次送り出す振動フィーダ4と、下方傾斜させた前記傾斜シュート3とからなる移送手段5を構成する。本実施例においては、前記傾斜シュート3の下方傾斜角度は45度とした。前記傾斜シュート3の傾斜面には流下方向に沿って溝3aを複数隣接して構成し、各原料米粒Kを、米粒の長さ方向に整列させて流下させるようにしてある(図3(a)参照)。本実施例においては、前記溝3aの幅Wは、米粒Kの幅寸法に相当する、3.3ミリメートルとした。前記傾斜シュート3の下端部近傍には、米粒の落下軌跡Gに沿った位置に、光学検出手段6と選別手段6aを順次配設する。
【0008】
前記光学検出手段6は、前記落下軌跡G上における光学検出位置Pを中心として、その一方側に照射部7を構成し、他方側にCCDカメラ8を構成する(図2参照)。前記照射部7は、前記光学検出位置Pに第一色の光(本実施例では緑色光)を照射する第一色照射部9と、該第一色照射部9とは異なる色の光(本実施例では赤色光)を照射する第二色照射部10と構成する。前記第一色照射部9は、前記CCDカメラ8の光軸11を挟み、その一方側に設けた一方照射部12と他方側に設けた他方照射部13とから構成する。前記一方照射部12及び他方照射部13は、該一方照射部12の光軸(光路)12aと前記CCDカメラ8の光軸11とがなす内角度α1と、該他方照射部13の光軸(光路)13aと前記CCDカメラ8の光軸11とがなす内角度α2とが略同一角度になる位置にそれぞれ配設する。本実施例においては、前記内角度α1及び内角度α2は共に25度とした。なお、前記内角度α1,α2において、前記CCDカメラ8や照射部7の組み付け誤差によって前記内角度α1,α2が多少異なったとしても、両角度は前記略同一角度の範囲に含まれる。一方、前記第二色照射部10については、配設する位置を、当該第二色照射部10の照射光の光軸10aが前記CCDカメラ8の光軸11と重合しない位置とする。なお、前記CCDは、「Charge Coupled Devices」の略である。
【0009】
前記第一色照射部9である一方照射部12及び他方照射部13、並びに、前記第二色照射部10は、それぞれ、前記光学検出位置Pに対して指向性のある光を照射できるものとする。例えば、ラインレーザー発光器を用いてもよいが、より好ましくは、左右方向の照射光のばらつきが少ないLED(発光ダイオード)を用いるのがよい。LEDを使用する場合にはそれぞれ、図2に示すようにLED素子13bと集光レンズ13cとから構成し、LED素子13bが放った光が前記集光レンズ13cによって図2に示す破線のように集光されて光学検出位置Pに対して横一線状に照射されるようにする。
【0010】
LEDを用いた前記第一色照射部9は、500nm〜580nmの緑色光を用い、本実施例で用いたLED素子は中心波長を520nmで半値幅が50mmのものを使用した。また、同じくLEDを用いた前記第二色照射部10は、600nm〜710nmの赤色光を用い、本実施例で用いたLED素子は中心波長を630nmで半値幅が18mmのものを使用した。なお、本発明において前記第一色照射部9と第二色照射部10とは、前述のように異なる色の光が照射できるようにすればよく、このため上記実施例のように緑色光と赤色光の組合せ以外に、400nm〜520nmの青色光と組み合わせるようにしてもよい。なお、前記第一色照射部9と第二色照射部10の光量調整については、後述する。
【0011】
前記CCDカメラ8の内部には、図2及び図4に示したように、入光方向から順に、レンズ14、ダイクロイックプリズム(分光手段)15、カラーCCDラインセンサ(第1CCDセンサ)16及びカラーCCDラインセンサ(第2CCDセンサ)17が配設してある。また、前記カラーCCDラインセンサ16には、前記光学検出位置Pの米粒Kから検出した透過光が前記ダイクロイックプリズム(分光手段)15の分光作用によって赤色の透過光が検出され、一方、カラーCCDラインセンサ17には同じくダイクロイックプリズム15の分光作用によって緑色の透過光が検出されるようにしてある。これらの前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17はそれぞれ前記胴割判別手段18に接続してあり、検出した透過光のデータ(電気信号)が送られるようになっている。
【0012】
前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17は、図3(b)に概念的に示したように、ライン状(横一列状)に連接した複数の受光素子から構成され、前記傾斜シュート3の複数の各溝(チャンネル)3aごとに受光素子を複数個ずつ割り当て、各溝(チャンネル)3aから落下する米粒Kからの透過光を受光することができるようにしてある。また、前記レンズ14、ダイクロイックプリズム15、カラーCCDラインセンサ16及びカラーCCDラインセンサ17らを一体型にすることにより、同一の米粒Kから検出した2色光(2波長)の透過光に基づいて米粒画像を形成する際に互いの米粒画像にズレが生じない。
【0013】
前記選別手段6aは、本実施例においては、高圧エアーを空気銃のように噴風させる高圧空気噴風手段6aとしたが、これ以外に、ソレノイドを使った板ばね式のものを使用してもよい。前記高圧空気噴風手段6aは、前記光学検出位置Pよりも下方位置の落下軌跡Gに向かって高圧エアーを噴風するように、前記各溝(チャンネル)3aごとに一つの噴風口6cを配設した複数の噴風口6cが連接してなるノズル6bを備える(図3(b))。該ノズル6bの各噴風口6cは管路を介してそれぞれの電磁弁と接続し、該各電磁弁は高圧エアー源と連通している。前記各電磁弁は前記エジェクタバルブ駆動手段25と接続し、該エジェクタバルブ駆動手段25からの噴風信号を受けて瞬間的に弁の開閉を行う。これにより、空気銃のような高圧エアーが瞬間的に噴風されて不良粒が落下軌跡Gから除去されて選別される。
【0014】
前記胴割判別手段18は、図5に示すように、前記CCDカメラ8に内蔵した前記カラーCCDラインセンサ16及びカラーCCDラインセンサ17のそれぞれに接続した入出力回路(I/O)19と、該入出力回路(I/O)19に接続した画像処理回路20と、該画像処理回路20に接続した中央演算部(CPU)21及び読み出し書き込み用記憶部(RAM)22と、前記中央演算部21に接続した読み出し専用記憶部(ROM)23及び入出力回路(I/O)24とから構成する。また、前記入出力回路24は、エジェクタバルブ駆動手段25に接続する。本実施例において、判別部18aとは、前記画像処理回路20、中央演算部21、読み出し書き込み用記憶部22及び読み出し専用記憶部23を指す。
【0015】
次に、本発明の作用を説明する。原料米粒Kは、前記移送手段5である振動フィーダ4の振動作用によって原料タンク2から、順次、傾斜シュート3の上流側に供給される。該傾斜シュート3に供給された各原料米粒Kは、前記溝3aに入り、米粒の向き(姿勢)をその長さ方向に整列させながら流下して終端部から放出される。放出された各原料米粒Kは、前記落下軌跡Gに沿って前記姿勢の状態で落下し、光学検出位置Pを通過する際に、常時点灯される、前記第一色照射部9からの緑色光と第二色照射部10からの赤色光とが照射される。
【0016】
前記CCDカメラ8は、前記光学検出位置Pにおいて緑色と赤色の照射光を受けた各米粒Kからの透過光を検出する。該透過光は、前記CCDカメラ8のレンズ14を通過した後にダイクロイックプリズム15によって緑色光と赤色光とに分光され、緑色の透過光はカラーCCDラインセンサ17によって走査(受光)され、また、赤色の透過光はカラーCCDラインセンサ16によって走査(受光)される。
【0017】
前記カラーCCDラインセンサ16が走査した受光信号(赤)は、順次、胴割判別手段18の前記I/O19を介して画像処理回路20に送られ、該画像処理回路20は、順次検出された赤色の透過光に基づいて、前記光学検出位置P(横一線上)における米粒イメージ(画像)を形成する。この赤色の透過光に基づいて作成された各米粒イメージ(画像)は、米粒の全体形状の中に亀裂部分、胚芽部分及び肌ずれ部分の各画像が現れた、図6(a)に示した第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分あり)となる。この第1の米粒画像は順次前記RAM22に記憶する。
【0018】
一方、前記カラーCCDラインセンサ17が走査した受光信号(緑)も同様に、順次、前記I/O19を介して胴割判別手段18における画像処理回路20に送られ、該画像処理回路20は、順次検出された緑色の透過光に基づいて、前記光学検出位置P(横一線上)における米粒イメージ(画像)を形成する。前記緑色の透過光に基づいて各米粒イメージ(画像)は、図6(b)に示すように、米粒の全体形状の中に、亀裂部分が現れないで、胚芽部分と肌ずれ部分のみの画像が現れる第2の米粒画像(図6(b)参照)となる。
【0019】
このように、第2の米粒画像において亀裂部分が現れない(検出されない)のは、前記一方照射部12及び他方照射部13からの照射光が、CCDカメラ8の光軸11を中心に前記光学検出位置Pの米粒(胴割粒)Kに対して同じ角度(前記内角度α1=内角度α2)から当たり、亀裂部分で光が屈折して生じる暗い影が互いに打ち消し合うためであり、一方、これが米粒(胴割粒)Kに対して一方の斜め方向のみから光を照射した場合には、亀裂部分で光が屈折して米粒表面に暗い影が現れる。前記内角度α1,α2については、70度以下であれば同様の効果が得られる。前記内角度が70度を超えると、亀裂部分の暗い影が強調されて打ち消しが不完全になり、また、肌ずれ部分や胚芽部分の検出精度も低下する等の不具合が生じる。なお、前記第2の米粒画像2(図6(b))は順次前記RAM22に記憶する。
【0020】
次に、前記RAM22から上記第1の米粒画像及び第2の米粒画像を読み出し、第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分)の光量から第2の米粒画像(胚芽部分及び肌ずれ部分のみ)の光量を差し引く引算処理を行う(図7)。この引算処理により、胚芽部分及び肌ずれ部分はともに打ち消されてキャンセルされるため、得られた画像には亀裂部分のみが残ることになる。これによって、胴割部分だけの亀裂画像を取り出すことができる(亀裂画像参照)。
【0021】
なお、前記第一色照射部9と第二色照射部10の光量は、前記図7に示したように引算処理により、第1の米粒画像と第2の米粒画像の間で、胚芽部分の画像(光量)、肌ずれ部分の画像(光量)及び米粒輪郭が互いに打ち消されてできるだけ画像に残らないようにして、亀裂画像だけが残るように予め調整しておく必要がある。万一、胚芽部分の画像(光量)、肌ずれ部分の画像(光量)及び米粒輪郭の画像が薄っすら残った場合には、例えば、亀裂画像の光量と区別するしきい値によってニ値化処理を行い、亀裂画像だけを明確にすればよい。
【0022】
図8を参照にし、上記図7に示した前記引算処理について更に詳しく説明する。説明の便宜上、図8のA.に示した、上記第1の米粒画像(亀裂部分、胚芽部分及び肌ずれ部分)及び第2の米粒画像(胚芽部分及び肌ずれ部分のみ)の各米粒断面(連続した撮像データの列)における光量(波形)をグラフにとり、この光量(波形)を使って前記引算処理を具体的に説明する。まず、図8のB.(1)には、前記上記第1の米粒画像及び第2の米粒画像の各米粒断面における前記光量(波形)を示し、図示のように波形中に亀裂部分、胚芽部分及び肌ずれ部分が検出されている。次に、上記(1)に示した二つの波形の差を演算し、この結果、図8のB.(2)に示した波形が得られる。これにより、互いの米粒画像における胚芽部分と肌ずれ部分とが互いに打ち消し合い亀裂部分に相当する落ち込み波形が検出される。次に、上記(2)に示した亀裂部分の波形レベルをマイナス域からプラス域に上昇させる処理を行い、この処理による波形を図8のB.(3)に示す。さらに、上記(3)に示した波形を微分処理して亀裂部分の波形を明確にする処理を行い、この処理による波形を図8のB.(4)に示す。このようにして、上記第1の米粒画像と第2の米粒画像における光量の引算処理を各米粒断面(連続した撮像データの列)単位で行い、亀裂画像だけを残す。
【0023】
次いで、前記CPU21は、前述のようにして残された亀裂画像の画素数をカウントする。カウント数は前記ROM23に予め設定した胴割判別用のしきい値、すなわち、胴割部分と判定するための連続した画素数と対比し、対比結果が、しきい値以上であれば胴割粒と判定(特定)する。一方、カウント数が前記しきい値未満であれば、前記胴割部分をキャンセルし、これを胴割粒と判定しない。
【0024】
次いで、胴割粒が特定されると、前記CPU21はI/O24を介して前記エジェクタバルブ駆動回路25に信号を出力し、前記エジェクタバルブ駆動回路25は、当該胴割粒を検出した前記各溝(チャンネル)3aに対応した前記高圧空気噴風手段6aにおける電磁弁に所定の遅延時間を置いて噴風信号を出して前記電磁弁を作動させ、これに対応したノズル6bの噴風口6cから噴風(空気銃)によって前記落下軌跡Gから胴割粒を選別する。このとき、胴割粒における中心位置等を公知の方法(例えば、特許第3722354号公報など)によって検出し、検出した中心位置に対応する電磁弁に信号を出力して胴割粒の中心位置を噴風し、より確実に胴割粒を選別するようにしてもよい。
【0025】
以上のように本発明によれば、米粒に、亀裂部分のほかに胚芽部分や肌ずれ部分があっても、胚芽部分や肌ずれ部分の画像をキャンセルして亀裂部分だけの亀裂画像を得ることができるので、胴割粒の判別を行う際に、胚芽部分や肌ずれ部分の画像によって亀裂部分を有さない正常粒を誤って胴割粒と判別することがなくなる。よって、胴割粒を正確に判別して選別することができるようになり、製品歩留まりが向上する。
【0026】
なお、上記実施例において、前記第一色照射部9は一方照射部12及び他方照射部13の二つによって構成したが、一つで構成してもよい(図9参照)。前記第一色照射部9を一つで構成する場合には、前記内角度を0(ゼロ)度とし、前記第一色照射部9の照射光軸9aが、前記CCDカメラ8の光軸11と重合する位置に配設する必要がある。これにより、上記本発明と同じ作用効果が得られる。
【0027】
また、本発明において、胚芽部分や肌ずれ部分の画像を引算処理によってキャンセルして亀裂部分の画像を得る際に、上記実施例においては、第1の米粒画像1から第2の米粒画像を差し引いたが、これを逆に、第2の米粒画像から第1の米粒画像を差し引いて亀裂部分の亀裂画像を取得するようにしてもよい。
【0028】
さらに、上記実施例において、CCDセンサは、カラーCCDラインセンサ17及びカラーCCDラインセンサ16の二つから構成するようにしたが、一つにすることもできる。そのためには、カラーCCDラインセンサにおける隣接した受光素子に、例えば、緑色の光を通すフィルターと赤色の光を通すフィルターとを交互に装着するようにして、各色の受光に基づいて前記第1の米粒画像1及び第2の米粒画像を作成することもできる。
【0029】
また、本発明の変形例としては、前記第一色照射部9と第二色照射部10とを交互点灯するようにし、受光センサ(CCDセンサ)を一色の光(一波長)で構成し、各点灯による光をそれぞれ受光し、この受光データに基づいて前記第1の米粒画像1及び第2の米粒画像を作成することもできる。
【図面の簡単な説明】
【0030】
【図1】本発明の光学式胴割選別機の縦側断面図
【図2】同光学式胴割選別機の要部拡大図
【図3】同光学式胴割選別機の傾斜シュートの断面図
【図4】同光学式胴割選別機のCCDカメラ内の概略構成
【図5】同光学式胴割選別機の胴割判別手段のブロック図
【図6】同光学式胴割選別機の作用における第1の米粒画像と第2の米粒画像
【図7】同光学式胴割選別機の作用における第1の米粒画像と第2の米粒画像との引算処理
【図8】前記引算処理の詳細な説明図
【図9】本発明の第一色照射部における変形例
【図10】従来の光学式胴割選別機の縦側断面図
【符号の説明】
【0031】
1 光学式胴割選別機
2 原料タンク
3 傾斜シュート
3a 溝
4 振動フィーダ
5 移送手段
6 光学検出手段
6a 選別手段
6b ノズル
6c 噴風口
7 照射部
8 CCDカメラ
9 第一色照射部
9a 照射光軸(光路)
10 第二色照射部
10a 照射光軸(光路)
11 透過光軸
12 一方照射部
12a 照射光軸(光路)
13 他方照射部
13a 照射光軸(光路)
13b LED素子
13c 集光レンズ
14 レンズ
15 ダイクロイックプリズム(分光手段)
16 カラーCCDラインセンサ(第1CCDセンサ)
17 カラーCCDラインセンサ(第2CCDセンサ)
18 胴割判別手段
18a 判別部
19 入出力回路(I/O)
20 画像処理回路
21 中央演算部(CPU)
22 読み出し書き込み用記憶部(RAM)
23 読み出し専用記憶部(ROM)
24 入出力回路(I/O)
25 エジェクタバルブ駆動回路
26 透明板
100 光学式胴割選別機
200 傾斜シュート
300 光学検出手段
300a 照射部
300b 受光部
400 選別手段
500 胴割判別手段
K 米粒
P 光学検出位置
【特許請求の範囲】
【請求項1】
原料の各米粒を整列させて移送する移送手段と、
該移送手段から放出された前記米粒の落下軌跡における光学検出位置に対して横一線状の光を照射する照射部及び前記光学検出位置を通過する各米粒からの透過光を検出するCCDセンサを備えたCCDカメラを設けて光学検出する光学検出手段と、
該光学検出手段が検出した透過光に基づいて各米粒における亀裂の有無を検出して胴割粒を判別する胴割判別手段と、
該胴割判別手段が判別した胴割粒を選別する選別手段と、
を有する光学式胴割選別機において、
前記CCDカメラは、該CCDカメラの光軸が前記落下軌跡の光学検出位置においてほぼ直角に交差する位置に配設するとともに、異なる複数の色の光を個別に受光する第1CCDセンサ及び第2CCDセンサを備えるものとし、
前記照射部は、600nm〜710nmの赤色光、500nm〜580nmの緑色光及び420nm〜520nmの青色光の中から互いに異なる色の光を照射する第一色照射部と第二色照射部とを備え、前記第一色照射部は、前記光学検出位置を通過した前記CCDカメラの光軸上に一つ配設するか、又は前記CCDカメラの光軸を挟んだ一方側と他方側に前記光学検出位置を照射する各光軸と前記CCDカメラの光軸とがなす内角度が略同一となる位置に一方照射部と他方照射部とを個別に配設し、前記第二色照射部は、前記CCDカメラの光軸と重合しない位置に配設し、
前記胴割判別手段は、前記第1CCDセンサが検出した透過光から第1の米粒画像を作成するとともに、前記第2CCDセンサが検出した透過光から第2の米粒画像を作成し、前記第1の米粒画像と第2の米粒画像との光量差を演算して米粒における亀裂部分を特定して胴割粒を判別する判別部を設けたことを特徴とする光学式胴割選別機。
【請求項2】
前記内角度を70度以下とする請求項1に記載の光学式胴割選別機。
【請求項3】
前記第1CCDセンサ及び第2CCDセンサをカラーCCDラインセンサとするとともに、前記CCDカメラには、前記光学検出位置から検出した透過光を前記第一色と第二色とに分光して個別に前記カラーCCDラインセンサの一方と他方に入光させる分光手段を設けた前記請求項1又は請求項2に記載の光学式胴割選別機。
【請求項4】
前記第一色照射部及び第二色照射部をLEDによって構成する前記請求項1乃至請求項3のいずれかに記載の光学式胴割選別機。
【請求項1】
原料の各米粒を整列させて移送する移送手段と、
該移送手段から放出された前記米粒の落下軌跡における光学検出位置に対して横一線状の光を照射する照射部及び前記光学検出位置を通過する各米粒からの透過光を検出するCCDセンサを備えたCCDカメラを設けて光学検出する光学検出手段と、
該光学検出手段が検出した透過光に基づいて各米粒における亀裂の有無を検出して胴割粒を判別する胴割判別手段と、
該胴割判別手段が判別した胴割粒を選別する選別手段と、
を有する光学式胴割選別機において、
前記CCDカメラは、該CCDカメラの光軸が前記落下軌跡の光学検出位置においてほぼ直角に交差する位置に配設するとともに、異なる複数の色の光を個別に受光する第1CCDセンサ及び第2CCDセンサを備えるものとし、
前記照射部は、600nm〜710nmの赤色光、500nm〜580nmの緑色光及び420nm〜520nmの青色光の中から互いに異なる色の光を照射する第一色照射部と第二色照射部とを備え、前記第一色照射部は、前記光学検出位置を通過した前記CCDカメラの光軸上に一つ配設するか、又は前記CCDカメラの光軸を挟んだ一方側と他方側に前記光学検出位置を照射する各光軸と前記CCDカメラの光軸とがなす内角度が略同一となる位置に一方照射部と他方照射部とを個別に配設し、前記第二色照射部は、前記CCDカメラの光軸と重合しない位置に配設し、
前記胴割判別手段は、前記第1CCDセンサが検出した透過光から第1の米粒画像を作成するとともに、前記第2CCDセンサが検出した透過光から第2の米粒画像を作成し、前記第1の米粒画像と第2の米粒画像との光量差を演算して米粒における亀裂部分を特定して胴割粒を判別する判別部を設けたことを特徴とする光学式胴割選別機。
【請求項2】
前記内角度を70度以下とする請求項1に記載の光学式胴割選別機。
【請求項3】
前記第1CCDセンサ及び第2CCDセンサをカラーCCDラインセンサとするとともに、前記CCDカメラには、前記光学検出位置から検出した透過光を前記第一色と第二色とに分光して個別に前記カラーCCDラインセンサの一方と他方に入光させる分光手段を設けた前記請求項1又は請求項2に記載の光学式胴割選別機。
【請求項4】
前記第一色照射部及び第二色照射部をLEDによって構成する前記請求項1乃至請求項3のいずれかに記載の光学式胴割選別機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−18419(P2008−18419A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2007−28188(P2007−28188)
【出願日】平成19年2月7日(2007.2.7)
【出願人】(000001812)株式会社サタケ (223)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成19年2月7日(2007.2.7)
【出願人】(000001812)株式会社サタケ (223)
【Fターム(参考)】
[ Back to top ]