
光学式輻輳角調整立体画像撮像装置及び光学式輻輳角調整立体画像撮像方法

【課題】ズームしつつ撮像しても、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見ることができる。
【解決手段】第1ビデオカメラ102R、第2ビデオカメラ102L、及び輻輳角調整部を具える光学式輻輳角調整3D画像撮像装置である。第1及び第2ビデオカメラは光学式撮像レンズL0を具えこの光軸が結像面(S1およびS2)に直交するように設定されている。この撮像レンズは、光軸可動レンズとズームレンズとが結合されて形成されている。ズーム操作を行ってもQで示す被写体が常にスクリーン面上に定位するように、輻輳角ωを一定に保つべく、撮像レンズの焦点距離がf1及びf2のとき、a1/f1=a2/f2(=tanω)を満足するようにそれぞれ光軸可動レンズをa1及びa2だけシフトさせる制御を輻輳角調整部によって実行する構成とされている。
【解決手段】第1ビデオカメラ102R、第2ビデオカメラ102L、及び輻輳角調整部を具える光学式輻輳角調整3D画像撮像装置である。第1及び第2ビデオカメラは光学式撮像レンズL0を具えこの光軸が結像面(S1およびS2)に直交するように設定されている。この撮像レンズは、光軸可動レンズとズームレンズとが結合されて形成されている。ズーム操作を行ってもQで示す被写体が常にスクリーン面上に定位するように、輻輳角ωを一定に保つべく、撮像レンズの焦点距離がf1及びf2のとき、a1/f1=a2/f2(=tanω)を満足するようにそれぞれ光軸可動レンズをa1及びa2だけシフトさせる制御を輻輳角調整部によって実行する構成とされている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、2台のビデオカメラを並列に配置して右目用画像と左目用画像を撮像することによって立体画像を撮像する立体画像撮像装置に関する。
【背景技術】
【0002】
近年、平面画像(以後、2D画像ということもある。)の高精細化に止まらず、立体画像(以後、3D画像ということもある。)についての関心が高まっている。例えば、2D画像を撮像する2Dカメラを2台並列に配置し、一方の2Dカメラで右目用画像を撮像し、他方の2Dカメラで左目用画像を撮像し、3D画像を再現可能な状態に取り込む3D画像撮像装置が盛んに研究されている。
【0003】
人間は、被写体までの距離に応じて両眼の視線の方向を変えて、すなわち、被写体と両眼とのなす角である人間の目の輻輳角(convergence angle)を調整して、左右の眼でそれぞれ画像を取り込んでいる。従って、3D画像撮像装置による撮像を行う際にも、人間が両眼によって認識する3D画像とあまり相違しない3D画像を撮像するためには、3D画像撮像装置を構成するそれぞれのビデオカメラの撮像レンズの光軸のなす角を調整する必要がある。以後、3D画像撮像装置を構成するそれぞれの撮像レンズの光軸のなす角のことを3D画像撮像装置の輻輳角、あるいは単に輻輳角というものとする。
【0004】
被写体が移動することによって被写体と3D画像撮像装置との距離が変化した場合、あるいはズーム操作をして3D画像撮像装置の撮像レンズの焦点距離を変化させた場合、それぞれの変化に応じて3D画像撮像装置の輻輳角を調整しなければ、以下のような事態が生じる。すなわち、この3D画像撮像装置で撮像された影像がスクリーン等の表示面に投影されて人間によって3D画像として観賞される際に、観賞する人間にとって、著しい目の疲れが生じたり、立体感に不自然さが感じられたり、あるいは立体視ができない等の不都合が生じる。
【0005】
実際の3D画像撮像装置による撮像は、撮像された画像をスクリーン等に映し出す場合にスクリーン面に定位させたい被写体を決めて、この被写体に左右の2Dカメラの撮像レンズの視線の交点を合せて行われる。ここで、左右の2Dカメラの撮像レンズの視線の交点を輻輳点という。
【0006】
従来、3D画像撮像装置の輻輳角の調整は3D画像撮像装置の操作者によって撮像の目的物として特定した被写体の動き、あるいは撮像レンズの焦点距離の変更に対応させて手動で行われていた(特許文献1及び2参照)。
【0007】
特許文献1に開示された3D画像撮像装置は、2台の2Dカメラの向きを調整するための機械的な機構を具えており、この機構を使って手動で2Dカメラの向きが調整され輻輳角が調整される構成とされている。
【0008】
また、特許文献2に開示された3D画像撮像装置にあっては、2台の2Dカメラの向きを電動機構によって調整可能である構成とされている。ただし、特許文献2に開示された3D画像撮像装置においても、被写体の移動あるいは3D画像撮像装置の撮像レンズの焦点距離の変化に応じて3D画像撮像装置の輻輳角が自動的に調整される機構は具えられていない。
【0009】
そこで、従来から、被写体から3D画像撮像装置までの距離の変化に対応させて輻輳角を自動的に調整する機能が具えられた3D画像撮像装置が開発されてきた。
【0010】
例えば、被写体から3D画像撮像装置までの距離の変化に対応させて輻輳角を自動的に調整する機能が具えられた輻輳角追尾式立体撮像カメラが提案されている(特許文献3参照)。この輻輳角追尾式立体撮像カメラにおいては、発光部と受光部とが具えられ、発光部から出力される赤外光が被写体に当たりこの被写体から反射された反射赤外光を受光部で受光する構成とされている。そして、被写体の動きに対応して受光部に入射される反射赤外光の入射角度から被写体までの距離を計測しこの距離に基づいて輻輳角が制御される。輻輳角の制御は、左右の2Dカメラの向きを調整することによって行われる。
【0011】
上述した特許文献1〜3に開示されている3D画像撮像装置は、いずれも左右の2Dカメラを回転させ、すなわち左右の2Dカメラの姿勢(2Dカメラの視線方向)を機械的に変化させることによって輻輳角を調整する方式である。この方式の3D画像撮像装置によれば、3D画像撮像装置との距離が変動せず被写体が静止している場合には、輻輳角を固定した状態でズーム操作を行っても、画像面上で被写体が定位した状態が保たれる。しかしながら、機械的に2Dカメラの姿勢を変化させる機構が大掛かりとなり、3D画像撮像装置のコンパクト化が難しい。
【0012】
一方、コンパクトな3D画像撮像装置を実現するには、輻輳角の制御を光学的な手段で行う構成とするのが望ましい。
【0013】
そこで、対物レンズ系と中間レンズ系と、この両レンズ系の間に可制御光偏光装置を具え、輻輳角の制御を光学的な手段で実現させたステレオカメラシステムが提案されている(特許文献4又は5参照)。
【0014】
特許文献4には、被写体までの距離を測距する測距装置と、この測距された距離に応じて輻輳角を自動的に調整する輻輳角調整機構とを具えたステレオカメラが開示されている。このステレオカメラによれば、測距装置によってステレオカメラと被写体までの距離が求められ、輻輳角調整機構によってこの距離に基づいて3D画像撮像装置の輻輳角が自動的に制御される。輻輳角の制御は、角度可変プリズムを用いて左右の2Dカメラの撮像レンズの光軸の向きを調整する、あるいは、左右の2Dカメラの撮像レンズを構成するレンズ群の一部のレンズの光軸を平行移動させて調整するといった光学的手段によって行われる。
【0015】
また、特許文献5には、中間レンズ系で形成される画像に基づいてステレオカメラと被写体までの距離が自動的に求められ、輻輳角調整機構によってこの距離に基づいて輻輳角が制御される方式のステレオカメラシステムが開示されている。このステレオカメラシステムでは、輻輳角の制御は、可制御光偏光装置が具える角度可変プリズム、あるいは光軸をシフトさせることが可能に構成された光軸可動レンズによる光学的な手段を用いて行われる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開昭59-192239号公報
【特許文献2】特開平2-75293号公報
【特許文献3】特開平1-93727号公報
【特許文献4】特開2001-22014号公報(特許第4428761号公報)
【特許文献5】特開平9-185139号公報(特許第3806198号公報)
【発明の概要】
【発明が解決しようとする課題】
【0017】
上述した特許文献4に開示されたステレオカメラは、静止画を撮像することを目的とした3D画像撮像装置であるので、ズーム操作によって引き起こされる3D画像の輻輳点に対応する被写体画像の位置の変動の問題は生じない。一方、特許文献5に開示されたステレオカメラシステムは、ステレオカメラシステムと被写体との距離に応じて輻輳角を光学的手段によって設定する機構を具えているが、被写体が定位した状態でズーム操作を行う機構を具えていない。
【0018】
輻輳角の制御を光学的な手段で行う構成とされた3D画像撮像装置によって、3D画像撮像装置の輻輳角を固定した状態で、ズーム操作を行いつつ動画である3D画像を撮像すると、撮像対象である被写体の画像を定位した状態で視覚することが困難となる。これは、ズーム操作によって3D画像撮像装置の結像面(画像面)上で被撮像点の位置がシフトするためである。
【0019】
例えば、位置を移動することが本来あり得ない建物を被写体としてこの被写体を拡大あるいは縮小して撮像し、撮像された画像(被撮像点)をスクリーン等に映し出して観る場合を想定すると次のような状態が生ずる。スクリーン等に映し出された建物を見ている人には、画像の拡大あるいは縮小に伴ってこの建物が近づいてきたりあるいは遠退いたりする現象に違和感を感ずる。すなわち、スクリーン面に建物が定位した状態で拡大あるいは縮小がなされるのではなく、建物を注目してみている人には、建物がスクリーン面の前に飛び出したりあるいは後ろに引っ込んだりする感覚を伴うからであり、このために観ている3D画像に対する違和感が生じる。
【課題を解決するための手段】
【0020】
この発明の発明者は、ズーム操作中のそれぞれの時点における撮像レンズの焦点距離と被撮像点のシフト量との比が一定値に保たれる条件で輻輳角を調整すれば、上述の課題が解決される、すなわち、上述の条件を満足するように輻輳角を調整しつつ撮像すれば、注目している物体(被写体)が空間の一点に固定された状態、すなわちスクリーン面に定位された状態で拡大されあるいは縮小される3D画像を撮像することが可能となるとの認識に至った。ここで、被撮像点とは輻輳点に対応する撮像レンズの像面上の共役点(conjugate point)を指す。また、被撮像点のシフト量とは、3D画像撮像装置を構成する左右の2Dカメラの2D画像の結像面におけるズーム操作中のそれぞれの時点における被撮像点と2Dカメラの撮像レンズの光軸との距離として定義される量である。
【0021】
そこで、この発明の目的は、ズーム操作しつつ撮像しても、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見ることができる、動画3D画像を撮像することが可能である光学式輻輳角調整3D画像撮像装置、及びこの光学式輻輳角調整3D画像撮像装置を用いて動画の3D画像を撮像する方法を提供することにある。
【0022】
上述の理念に基づくこの発明の第1の要旨によれば、以下の光学式輻輳角調整3D画像撮像装置が提供される。なお、この発明の光学式輻輳角調整3D画像撮像装置を構成する右目用画像と左目用画像とをそれぞれ撮像するビデオカメラは互いに同一構造の2Dビデオカメラである。
【0023】
この発明の光学式輻輳角調整3D画像撮像装置は、右目用画像を撮像する第1ビデオカメラと、左目用画像を撮像する第2ビデオカメラと、輻輳角調整部とを具えている。
【0024】
第1ビデオカメラは第1撮像レンズを具え、第2ビデオカメラは第2撮像レンズを具えており、第1及び第2撮像レンズのそれぞれは、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとを、カメラレンズの光軸に対して光軸可動レンズの光軸が平行な状態でシフトさせることが可能な状態に結合されて構成されている。
【0025】
輻輳角調整部は、被写体に向けられた第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、光軸可動レンズのシフト量とカメラレンズの焦点距離との比が一定値に保たれる条件で、第1及び第2撮像レンズがそれぞれ具えているカメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、第1および第2撮像レンズが具えている双方の光軸可動レンズの光軸のシフト量を調整する。
【0026】
上述の輻輳角調整部は、例えば、ズーム操作のそれぞれの時点におけるシフト量a(z)と、焦点距離f(z)との比a(z)/f(z)が、a(z)/f(z)=aw/fw=at/ft(=一定値)で与えられる条件でシフト量a(z)を調整する構成とするのが良い。
【0027】
ここで、zは、カメラレンズの焦点距離を規定するズーム位置を与えるパラメータである。fwはカメラレンズのワイド端での焦点距離を表し、ftはテレ端での焦点距離を表す。awはカメラレンズのワイド端でのシフト量を表し、atはテレ端でのシフト量を表す。f(z)及びa(z)はそれぞれzの関数として表したズーム操作に伴う焦点距離及びシフト量を表している。
【0028】
第1及び第2撮像レンズのそれぞれは、ズーム位置を与えるパラメータzを出力するズーム位置信号出力部と、レンズ位置検出器と、レンズ駆動回路とを具えて構成するのが好適である。
【0029】
輻輳角調整部は、倍率選択手段と、シフト量変換手段と、ズーム倍率変換手段と、ズーム倍率規格化手段と、演算手段と、比較手段とを具えて構成するのが好適である。
【0030】
ここで、倍率選択手段は、第1及び第2撮像レンズのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定する。
【0031】
シフト量変換手段は、輻輳点に対応する第1及び第2撮像レンズのテレ端におけるシフト量atを出力する。
【0032】
ズーム倍率変換手段は、焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力する。
【0033】
ズーム倍率規格化手段は、ズーム倍率変換手段から出力されるズーム比m(z)と、倍率選択手段から出力される基準ズーム比mとの比m(z)/mを算出して出力する。
【0034】
演算手段は、ズーム倍率規格化手段から出力される比m(z)/mと、シフト量変換手段から出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量a(z)で与えられるat×m(z)/mを算出して出力する。
【0035】
レンズ位置検出器は、光軸可動レンズのシフト量a'(z)を検出する。
【0036】
比較手段は、レンズ位置検出器から出力されるシフト量a'(z)と、演算手段から出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように光軸可動レンズをシフトさせる指示信号を出力する。
【0037】
前レンズ駆動回路は、比較手段から出力された指示信号に基づいて光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する。
【0038】
この発明の第2の要旨によれば、この発明の3D画像撮像方法を提供することにある。
【0039】
この発明の3D画像撮像方法は、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロック(GENLOCK:Generator lock)させてそれぞれ撮像することによって3D画像を撮像する3D画像撮像方法であり、以下の合成画像形成ステップと輻輳角調整ステップとを含んで構成される。
【0040】
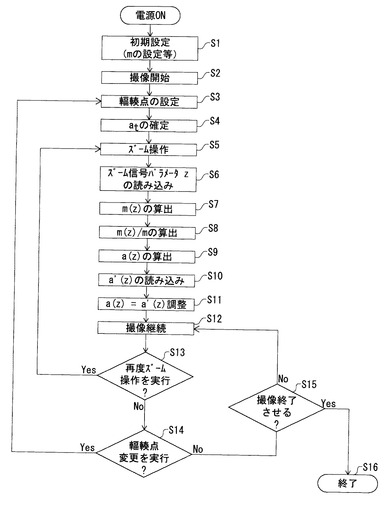
これらのステップは、例えば、以下のステップS1〜ステップS16を含んで構成され、合成画像形成ステップは、右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成するステップ、例えば、ステップS3〜ステップS4であり、また、輻輳角調整ステップは、上述の輻輳角調整部において実行されるステップ、例えば、ステップS6〜ステップS11である。
【0041】
ステップS1は、第1及び第2撮像レンズの双方のカメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftとの比m(=ft/fw)を設定し、この比mを記憶装置に書き込むステップである。
【0042】
ステップS2は、第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップである。
【0043】
ステップS3は、右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成するステップである。
【0044】
ステップS4は、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの光軸可動レンズのシフト量atを、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値と共に確定させるステップである。
【0045】
ステップS5は、第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップである。
【0046】
ステップS6は、ステップS5によって変化された第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値を読み込むステップである。
【0047】
ステップS7は、カメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成するステップである。
【0048】
ステップS8は、比mとm(z)テーブルとを記憶装置から読み出して、m(z)とmとの比m(z)/mを算出するステップである。
【0049】
ステップS9は、パラメータの値がzであるときのカメラレンズのシフト量a(z)をa(z)=at×m(z)/mとして算出するステップである。
【0050】
ステップS10は、光軸可動レンズのシフト量a'(z)を読み込むステップである。
【0051】
ステップS11は、ステップS9で算出されたシフト量a(z)とステップS10で読み込まれたシフト量a'(z)とが等しくなるように、光軸可動レンズの光軸の位置を調整するステップである。
【0052】
ステップS12は、ステップS11でa(z)=a'(z)と調整された状態で、第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップである。
【0053】
ステップS13は、再度第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップである。
【0054】
ステップS14は、撮像対象となる被写体を変更して、右目用画像及び左目用画像における変更した被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップである。
【0055】
ステップS15は、撮像操作を終了させるか否かを判断するステップである。
【0056】
ステップS16は、撮像作業を終了させるステップである。
【0057】
ステップS13において、再度のズーム操作を行うと判断したときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、ステップS14において、撮像対象となる被写体を変更すると判断したときはステップS3に進み、撮像対象となる被写体を変更しないと判断したときはステップS15に進み、ステップS15において、撮像操作を終了させないと判断した場合はステップS12に進み、撮像操作を終了させると判断した場合はステップS16に進むことによってこの発明の3D画像撮像方法は完了する。
【0058】
以後の説明において、第1ビデオカメラと第2ビデオカメラとを区別して説明する必要がない場合は単にビデオカメラと記述し、また、第1撮像レンズと第2撮像レンズとを区別して説明する必要がない場合は同様に単に撮像レンズと記述することもある。
【発明の効果】
【0059】
この発明の光学式輻輳角調整3D画像撮像装置によれば、輻輳角調整部を具えることによって、ズーム操作中のそれぞれの時点における撮像レンズの焦点距離と、ビデオカメラの結像面におけるズーム操作中のそれぞれの時点における光軸可動レンズのシフト量との比が一定値に保たれる条件で当該シフト量を調整することが可能となる。
【0060】
上述の輻輳角調整部を具えることによって、この発明の光学式輻輳角調整3D画像撮像装置によれば、ズーム操作しつつ撮像しても、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見ることができる動画3D画像を撮像することが可能となる。
【図面の簡単な説明】
【0061】
【図1】この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的立体斜視図である。
【図2】この発明の実施形態の光学式輻輳角調整3D画像撮像装置を構成するビデオカメラを撮像レンズの光軸を含む平面で切断して示す概略的断面構成図である。
【図3】(A)は光軸可動レンズの光軸がシフトされていない状態を示す図であり、(B)は光軸可動レンズの光軸がセンター位置からaだけシフトした状態を示す図である。
【図4】(A)は光軸可動レンズがセンター位置にある状態で第1及び第2ビデオカメラのそれぞれの視線方向α及びβが被写体に向けられ輻輳角δが設定されている状態を示す図であり、(B)はズーム操作による焦点距離の変動によって被写体の仮想的位置が移動することによって輻輳角が変更される状態を示す図である。
【図5】レンズアダプターを利用して構成される光学式輻輳角調整3D画像撮像装置の構造の説明に供する図である。
【図6】輻輳角を機械的な手法で調整する方式の3D画像撮像装置におけるズーム動作時の画像の定位についての説明に供する図である。
【図7】輻輳角を光学的な手法で調整する方式の3D画像撮像装置におけるズーム動作時の画像の定位についての説明に供する図である。
【図8】右目用画像を撮像する部分と左目用画像を撮像する部分とが対称の構造で構成されていることを強調して示した、この発明の実施形態の光学式輻輳角調整3D画像撮像方法についての説明に供する図である。
【図9】ソフトウエア処理によって実現される部分を一括して示した、この発明の実施形態の光学式輻輳角調整3D画像撮像方法についての説明に供する図である。
【図10】この発明の実施形態の光学式輻輳角調整3D画像撮像方法のフローチャートである。
【発明を実施するための形態】
【0062】
以下、図を参照して、この発明の実施の形態につき説明する。なお、各図は、この発明が理解できる程度に各構成部分を概略的に示してあるに過ぎず、この発明を図示例に限定するものではない。以下の説明において、特定の機器及び条件等を用いることがあるが、これら機器及び条件は好適例の一つに過ぎず、したがって、何らこれらに限定されない。また、各図において同じ構成要素については同一の番号を付して示し、これらの機能等に関して、その重複する説明を省略することもある。
【0063】
<この発明の実施形態の光学式輻輳角調整3D画像撮像装置>
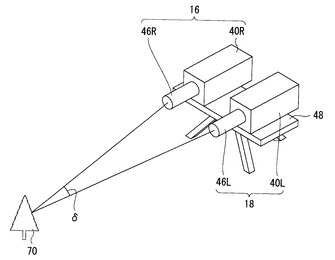
図1を参照して、この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的構成について説明する。図1は、この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的立体斜視図である。以後、光学式輻輳角調整3D画像撮像装置を単に3D画像撮像装置ということもある。
【0064】
図1に示すように、この発明の実施形態の3D画像撮像装置は、右目用画像を撮像する第1ビデオカメラ16と、左目用画像を撮像する第2ビデオカメラ18とを具え、カメラ用三脚48に一体化されて固定されている。この発明の実施形態の3D画像撮像装置は、更に輻輳角調整部を特徴的に具えているが、この輻輳角調整部については、その機能の一部がソフトウエア処理によって実現されるので、後述するこの発明の実施形態の3D画像撮像方法の説明においてその構造及び動作について詳しく説明することとし、図1では図示を省略してある。
【0065】
第1ビデオカメラ16は第1撮像レンズ46Rとビデオカメラ筺体40Rで構成され、第2ビデオカメラ18は第2撮像レンズ46Lとビデオカメラ筺体40Lで構成されている。ここで、輻輳角δを第1ビデオカメラ16の視線と第2ビデオカメラ18の視線とのなす角として示してあり、その大きさがδに設定されている場合を図示してある。この角度δは、後述するように、第1ビデオカメラ16の視線と第2ビデオカメラ18の視線とが平行な状態から同じ角度ωだけ偏角した結果形成されるものとして、ω=δ/2なる関係をもっている。以後の説明において、ωを第1及び第2ビデオカメラの偏角というものとする。
【0066】
カメラオペレーターは、カメラに設けられた図示されていないモニター(出力部)を見ながら、図示されていない操作装置(入力制御部)を操作しながら、第1ビデオカメラ16と第2ビデオカメラ18とを一体化して制御して、第1ビデオカメラ16と第2ビデオカメラ18の双方の視線を被写体70の方向に向ける操作を行う。以後、被写体70のいずれか一箇所を代表して被写体70を指定するものとし、この一箇所を輻輳点ということもある。
【0067】
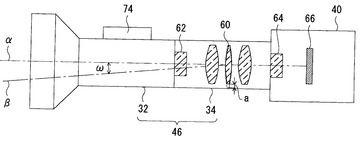
図2、図3(A)及び図3(B)を参照して、第1ビデオカメラ16及び第2ビデオカメラ18の概略的構成について説明する。第1ビデオカメラ16及び第2ビデオカメラ18は同一構造であるので、ここでは第1及び第2ビデオカメラと区別することなくビデオカメラとして説明する。図2は、この発明の実施形態の3D画像撮像装置を構成するビデオカメラを、撮像レンズの光軸を含む平面で切断して示す概略的断面構成図である。
【0068】
図2に示すように、この発明の実施形態の3D画像撮像装置を構成するビデオカメラは、ビデオカメラ筺体40に撮像レンズ46を具えている。撮像レンズ46は、ズーミング撮像を可能とする焦点距離可変型のカメラレンズ32にアタッチメントレンズ34が結合されて構成されている。アタッチメントレンズ34は、カメラレンズ32の光軸に対して光軸を平行方向にシフトさせることが可能である光軸可動レンズ60を具えている。従って、撮像レンズ46は、アタッチメントレンズ34を具えていることによって、カメラレンズ32の光軸に対して光軸可動レンズ60の光軸が平行な状態でシフトさせることが可能となっており、この光軸可動レンズ60の光軸をシフトさせることによって撮像レンズの視線方向を変化させることが可能となっている。
【0069】
カメラレンズ32とアタッチメントレンズ34は結合部62を介して結合されており、アタッチメントレンズ34とビデオカメラ筺体40とも結合部64を介して結合されている。これら結合部62および64は、この発明の実施形態の3D画像撮像装置を形成するに当たり、従来の2D画像を撮像する2Dビデオカメラの基本構成を変更することなく、単純にアタッチメントレンズ34を装着するだけで、第1及び第2ビデオカメラを構成することを可能とするためのものである。
【0070】
従って、結合部62と結合部64は、相俟ってカメラレンズ32を、アタッチメントレンズ34を介さずに直接ビデオカメラ筺体40に結合させた場合と、アタッチメントレンズ34を介してカメラレンズ32をビデオカメラ筺体40に結合させた場合とにおいて、ビデオカメラ筺体40が具えている結像面66に形成される両画像の間に、収差の相違が生じないようにする働きをしている。
【0071】
カメラレンズ32とアタッチメントレンズ34とが接合されて構成される撮像レンズにあっては、この撮像レンズの焦点距離はカメラレンズ32によって制御される。従って、以下の説明では、カメラレンズ32によって焦点距離を調整するというところを、撮像レンズの焦点距離を調整するということもある。
【0072】
このように、既存の2Dビデオカメラに何らの改造を施さずにアタッチメントレンズ34を装着するだけで、第1及び第2ビデオカメラが構成されれば、従来の2Dビデオカメラのために研究されてきた技術蓄積を最大限有効に利用でき、低コストで高性能な3D画像撮像装置が実現される。
【0073】
カメラレンズ32は、従来周知のズーミング撮像を可能とする焦点距離可変型のカメラレンズであり、ズーム位置信号出力部74を具えている。カメラレンズ32の焦点距離の変更は、カメラレンズ32が焦点距離を変更するための回転機構として具えている回転部分を回転させることによって実現される。また、ビデオカメラ筺体40が具えている結像面66に形成される画像のピントの調整は、カメラレンズ32がピント調整のための回転機構として具えている回転部分を回転させることによって実現される。
【0074】
ズームレンズは、一般に前群レンズと後群レンズの2群構成からなるペッツバール型レンズの間隔を変える構成とされており、前群レンズと後群レンズのそれぞれの位置を変えることによって焦点距離可変機能が実現されている。この前群レンズと後群レンズの移動を連動させる特殊なカムが用いられており、このカムの回転量と焦点距離とは一対一の対応関係にある。ズーム位置信号出力部74は、このカムの回転量を電気信号に変換して読み出す機能を有している。具体的には、周知のポジションセンサーデバイス(PSD: Position Sensitive Detector)等を用いて上述のカムの回転量を読み取る構成を容易に構築することができる。
【0075】
図2に示したビデオカメラが具える撮像レンズは、カメラレンズ32にアタッチメントレンズ34が結合されて構成されている。しかしながら、この発明の実施形態の3D画像撮像装置を構成する撮像レンズは、この構成に限定されるものではない。光軸を平行にシフトさせることが可能な光軸可動レンズ及びズーミング撮像を可能とする焦点距離可変型のカメラレンズの双方の機能が実現されれば、個別に作製されたカメラレンズ32とアタッチメントレンズ34とを結合させて構成する代わりに、はじめから撮像レンズを一体化されて構成されるものとして設計してもよい。
【0076】
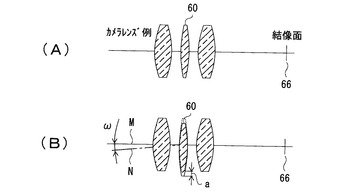
図3(A)及び図3(B)を参照して、アタッチメントレンズ34の概略的構成と光軸可動レンズ60による撮像レンズの視線方向を変える原理を説明する。図3(A)及び図3(B)は、アタッチメントレンズ34及びビデオカメラ筺体40が具えている結像面66を含めて、概略的構造をレンズの光軸を含む平面で切断して示す断面構造図である。アタッチメントレンズ34は、光軸可動レンズ60を挟んで前後に単レンズが挿入されているが、これらの単レンズは必ずしも必要なレンズではない。ここでは、この単レンズを、上述した結合部62及び64と共に、ビデオカメラ筺体40が具えている結像面66に形成される画像に違いが生じない状態を実現する働きを分担するレンズとして示してある。
【0077】
図3(A)に示すように、カメラレンズ32の光軸と光軸可動レンズ60の光軸とが合致しており光軸可動レンズ60の光軸がシフトされていない状態、すなわち光軸可動レンズ60がセンター位置にある場合は、光軸可動レンズ60によるカメラレンズの光軸の偏角は生じない。一方、図3(B)に示すように、光軸可動レンズ60の光軸がセンター位置からaだけシフトした状態にある場合は、光軸可動レンズ60の光軸が偏角ωだけ曲げられる。
【0078】
図3(B)では、カメラレンズ32の光軸を実線Mで示し、偏角ωだけ曲げられた光軸を破線Nで示してある。この破線Nで示す直線の方向が後述する第1及び第2ビデオカメラのそれぞれの視線方向となる。偏角ωと光軸可動レンズ60の光軸のシフト量aとは、カメラレンズ32及びアタッチメントレンズ34の構成によって一義的に確定する関係にある。従って、予め偏角ωをシフト量aの関数として確定させておくことが可能となる。
【0079】
偏角ωとシフト量aとが一義的に確定することに関連して、ビデオカメラの結像面66における被輻輳点のシフト量と撮像レンズの焦点距離との関係が、撮像レンズの構造を確定することによって一義的に確定することとなる。従って、後述する被輻輳点のシフト量と撮像レンズの焦点距離との関係を規定するシフト量テーブルを作成することが可能となる。
【0080】
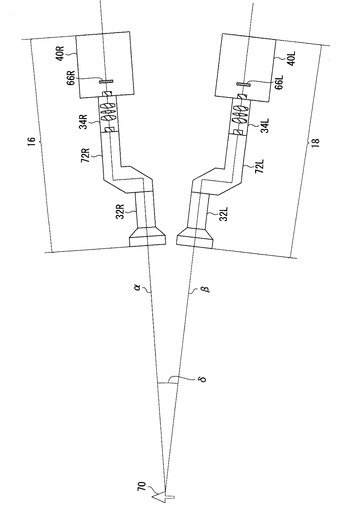
図4(A)及び図4(B)を参照して、第1ビデオカメラ16及び第2ビデオカメラ18の視線方向と被写体70に対する輻輳角δとの関係について説明する。図4(A)及び図4(B)は、第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの焦点距離の変動に対応して被写体70の仮想的位置が移動することに対する輻輳角δの変化の関係についての説明に供する図である。図4(A)及び図4(B)において、被写体70及び被写体70'はそれぞれ、結像面66に結像される被撮像点に共役な撮像点に対応する。
【0081】
図4(A)に示すように、光軸可動レンズがセンター位置にある状態で第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの視線方向α及びβが被写体に向けられ輻輳角δが設定されている状態から、図4(B)に示すように、第1撮像レンズ46R及び第2撮像レンズ46Lをズーム操作することによってそれぞれの焦点距離を変動させると、被写体70は被写体70'と示す仮想的位置に移動する。このようにズーム操作が行われても、結像面66R及び結像面66Lにおける被写体の画像(被撮像点)の位置が変動しないようにするには、図4(B)に示すように、アタッチメントレンズ34R及び34Lによって第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの視線方向α及びβがα'及びβ'に偏角されるようにする必要がある。
【0082】
言い換えると、結像面66R及び結像面66Lにおける被写体の画像(被撮像点)の位置が変動しないようにするには、アタッチメントレンズ34R及び34Lがそれぞれ具えている光軸可動レンズをシフトさせる必要がある。詳細は後述するが、この条件が満足されるためには、第1撮像レンズ46R及び第2撮像レンズ46Lの焦点距離と被撮像点のシフト量との比が一定値に保たれる条件で、ズーム操作に対応させて光軸可動レンズのシフト量を決定する必要がある。
【0083】
人間が両眼によって認識する3D画像とあまり相違しない3D画像を撮像するためには輻輳角を調整することに加えて、右目用画像と左目用画像をそれぞれ撮像する際の第1撮像レンズと第2撮像レンズとの光軸間距離(基線長と呼ばれることもある。)が人間の両眼の瞳孔間隔に近いほど好ましい。人間の平均的な瞳孔間隔は65mm程度であるから、3D画像撮像装置の基線長も65mm程度に設定された状態で右目用画像及び左目用画像が撮像されれば、人間の目で見た3D画像に近い画像が撮像できる。
【0084】
既存の2Dビデオカメラを2台並列に配置して3D画像撮像装置を構成すると、2Dビデオカメラの筺体の大きさ等の制限から基線長を65mm程度に設定することは困難である。そこで、レンズアダプターを挿入することで、第1撮像レンズと第2撮像レンズとの基線長を65mm程度に設定して3D画像撮像装置を構成することが考えられる。
【0085】
図5を参照して、レンズアダプターを利用して基線長を65mm程度に設定して構成された3D画像撮像装置の構成について説明する。図5は、レンズアダプターを利用して構成される3D画像撮像装置の第1撮像レンズと第2撮像レンズの光軸を含む平面で切断して示す概略的断面構造図である。
【0086】
図5に示すように、第1ビデオカメラ16はカメラレンズ32Rとアタッチメントレンズ34Rとの間にレンズアダプター72Rが挿入されており、第2ビデオカメラ18はカメラレンズ32Lとアタッチメントレンズ34Lとの間にレンズアダプター72Lが挿入されている。
【0087】
レンズアダプター72Rは、カメラレンズ32Rとアタッチメントレンズ34Rとの間に挿入しても、ビデオカメラ筺体40R、カメラレンズ32R、アタッチメントレンズ34Rの構造を変更することなく第1ビデオカメラ16の結像性能に影響を与えない光学的特性を備えていることが望ましい。レンズアダプター72Lについても同様である。このような光学的特性を備えたレンズアダプターとしては、例えば、特許第4447651号公報に開示されているレンズアダプターを適宜利用することが可能である。
【0088】
なお、図5に示す3D画像撮像装置では、第1ビデオカメラ16と第2ビデオカメラ18の双方にレンズアダプターが挿入されているが、第1撮像レンズと第2撮像レンズとの基線長を65mm程度に設定することが可能である場合には、第1ビデオカメラ16あるいは第2ビデオカメラ18のいずれか一方にレンズアダプターを挿入する形態としてもよい。
【0089】
また、カメラレンズ、レンズアダプター、及びアタッチメントレンズを図5に示すように、それぞれ個別に作製されたものを結合させて第1及び第2撮像レンズを構成する代わりに、はじめから第1及び第2撮像レンズのそれぞれを一体化されて構成されるものとして設計してもよい。
【0090】
<光学式輻輳角調整3D画像撮像装置のズーム操作時の画像の定位について>
この発明の実施形態の3D画像撮像装置の構成およびその動作についての説明に先立ち、解決すべき従来の課題を明確にするために、3D画像撮像装置のズーム操作時の画像の定位について、図6及び図7を参照して具体的に説明する。図6及び図7においては、被写体が存在している輻輳点の位置をQで示し、また、撮像レンズ及び撮像レンズの焦点距離、被写体の画像が結像される結像面について、3D画像撮像の定位に関する説明に必要とされる範囲で簡略化して示してある。
【0091】
以後の説明において、第1及び第2ビデオカメラの姿勢を機械的に変化させることによって輻輳角を調整する方式が採用されている3D画像撮像装置を機械式3D画像撮像装置ということもある。一方、光軸可動レンズ等の光学的な手段で調整する方式が採用されている3D画像撮像装置を光学式3D画像撮像装置ということもある。
【0092】
図6及び図7において、撮像レンズを「撮像レンズL」として単レンズで示してあるが、この撮像レンズLは、光軸可動レンズとカメラレンズとが結合されて形成されているものと理解されたい。また、光軸可動レンズの光軸のシフトについては、撮像レンズLの光軸をシフトさせることとして簡略化して示してある。
【0093】
また、図6及び図7では、分かり易さを優先させて、撮像レンズの焦点距離がf1である場合の被撮像点が形成される結像面を結像面S1上とし、撮像レンズの焦点距離がf2である場合の被撮像点が形成される結像面を結像面S2となるように示してある。
【0094】
しかしながら、実際の3D画像撮像装置においては、カメラレンズはズーム撮像を可能とする焦点距離可変型のズームレンズであって、焦点距離が変動しても結像面に形成される被写体の画像はその倍率が変動するのみで、被写体の画像位置は変動しないように形成されている。すなわち、実際のズームレンズにあっては、ズーム操作によって焦点距離が変動することに伴い、この変動分だけズームレンズを構成するレンズ群を光軸に平行方向に移動させる構成とすることによって結像面を固定した状態で被撮像点を結像面に定位するように実現されている。これによって、実際のズームレンズが装着されたビデオカメラにあっては、上述したように実際のズームレンズは焦点距離を変化させても同一結像面に形成されるように設計されている。
【0095】
すなわち、図6及び図7では、分かり易さを優先させて、ズーム操作によって焦点距離が変動することに伴うズームレンズを構成するレンズ群を固定し、その代わりにこの移動量を結像面S1からS2への変動として示してあるものと理解されたい。
【0096】
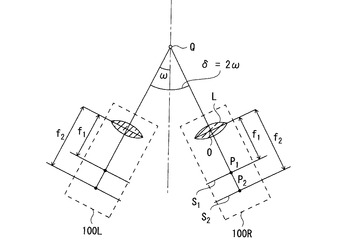
図6に機械式3D画像撮像装置の概略的構成を示す。第1ビデオカメラ100Rは、撮像レンズLを具え、この撮像レンズLの光軸が結像面(S1およびS2と示してある。)に直交するように設定されている。第2ビデオカメラ100Lも、第1ビデオカメラ100Rと同一の構造である。
【0097】
機械式3D画像撮像装置では、図6に示すように、Qで示した被写体(輻輳点)に対して撮像レンズの光軸とビデオカメラの視線とが一致している。すなわち、輻輳点に対応する撮像レンズの像面上の共役点である被撮像点は常に画面上の中央に存在している。従って、ズーム操作がされて撮像レンズの焦点距離がf1からf2に変化することによって被撮像点がP1からP2に移動しても、この撮像点P1とP2とは常に画面上の中央(撮像レンズの光軸上)に存在している。
【0098】
ここで、偏角ωが第1ビデオカメラの視線と第2ビデオカメラの視線とがなす角である輻輳角δの半分の値、すなわちω=δ/2であるものとする。また、ビデオカメラの視線とは、ビデオカメラから被写体に向う方向を示す直線であり、ここでは撮像レンズの中心から輻輳点に向う直線であると定義する。図6で示すビデオカメラでは、撮像レンズLの光軸と視線とが合致している。
【0099】
機械式3D画像撮像装置にあっては、左右のビデオカメラの姿勢(ビデオカメラの視線方向)が固定された状態でズーム操作がされても、輻輳点に対応する被写体画像の位置が変動することはない。これは、図6に示すように、撮像レンズLの焦点距離が変動しても、輻輳点に対応する撮像レンズの像面上の共役点の位置は常に変動しないからである。
【0100】
一方、光学式3D画像撮像装置にあっては、光軸可動レンズの光軸の位置を固定したままズーム操作を行うと輻輳点に対応する被写体画像の位置が変動するため、3D画像における被写体の位置はスクリーン面上に定位せず、スクリーン面から飛び出したりあるいは引っ込んだりする。
【0101】
すなわち、光学式3D画像撮像装置にあっては、光軸可動レンズの光軸の位置を固定したまま撮像レンズの焦点距離を変化させると、第1ビデオカメラで撮像される右目用画像と第2ビデオカメラで撮像される左目用画像を重ねて合成される3D画像(合成画像)における被写体の位置はスクリーン面上に定位しない。従って、合成画像である3D画像において、被写体の位置をスクリーン面上に定位させるためには、撮像レンズの焦点距離を変化させることに対応させて、一定の条件で光軸可動レンズの光軸をシフトさせる必要がある。
【0102】
この発明の実施形態の3D画像撮像装置は、既に説明したように、光学式輻輳角調整3D画像撮像装置である。ここで、一般的光学式3D画像撮像装置の結像光学系の基本構造について説明する。
【0103】
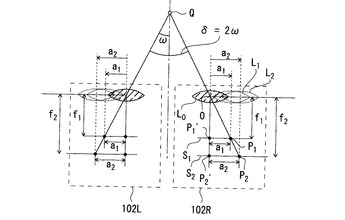
図7に光学式3D画像撮像装置の結像光学系の概略的構成を示す。第1ビデオカメラ102Rは、撮像レンズL0を具え、この撮像レンズL0の光軸が結像面(S1およびS2と示してある。)に直交するように設定されている。第2ビデオカメラ102Lも、第1ビデオカメラ100Rと同一の構造である。図7では、撮像レンズの位置を区別するために、撮像レンズL0と示す位置からa1だけシフトさせた撮像レンズをL1と示してあり、同じくa2だけシフトさせた撮像レンズをL2と示してある。
【0104】
図7において、撮像レンズL0はビデオカメラの偏角が0である場合を示しており、撮像レンズL1は撮像レンズを構成するズームレンズの焦点距離がf1であり偏角がωに設定されている場合を示しており、撮像レンズL2は撮像レンズを構成するズームレンズの焦点距離がf2であり偏角がωに設定されている場合を示している。
【0105】
図7に示す光学式3D画像撮像装置において、ビデオカメラの視線とは撮像レンズの中心Oから輻輳点Qに向う直線である。光学式3D画像撮像装置にあっては、撮像レンズが光軸可動レンズを具えて構成されており、この光軸可動レンズによって第1及び第2ビデオカメラの姿勢の変更に相当する調整を行っている。そのため、撮像レンズL0の光軸が視線の方向に曲げられており、撮像レンズL0の光軸とビデオカメラの視線とは合致していない。
【0106】
光学式3D画像撮像装置では、図7に示すように、光軸可動レンズの光軸の位置を固定したまま撮像レンズの焦点距離をf1からf2に変化させると、Qで示した被写体(輻輳点)に対応する撮像レンズの像面上の共役点の位置はP1からP2に像面上を移動する。すなわち、撮像レンズの焦点距離がf1であるときの輻輳点の共役点の位置P1は、画面上の中央位置からa1だけ離れた位置に結像し、撮像レンズの焦点距離がf2であるときの輻輳点の共役点の位置P2は、画面上の中央位置からa2だけ離れた位置に結像している。
【0107】
このため、被写体の位置をスクリーン面上に定位させるためには、焦点距離をf1であるときはP1’の位置に結像されるところをP1に結像されるように光軸可動レンズの光軸をa1だけシフトさせ、焦点距離をf2であるときはP2’の位置に結像されるところをP2に結像されるように光軸可動レンズの光軸をa2だけシフトさせて、Qで示した被写体に対応する撮像レンズの像面上の共役点の位置が常に変動しないようにすることが必要となる。
【0108】
右目用画像及び左目用画像中の撮像対象となる被写体の像(輻輳点Qに対応する撮像レンズの像面上の共役点)をスクリーン面上(撮像の場合は結像面上)で重なり合っている場合、その被写体はスクリーン面上に定位して見える。ここで、スクリーン面とは、映画のスクリーン面を指すことは勿論、立体画像が表示機能を持つテレビ画面等も意味する。
【0109】
被写体の位置をスクリーン面上に定位させる、すなわち、右目用画像及び左目用画像中の撮像対象となる被写体の像を合致させて合成画像を形成するとは、偏角ωを常に一定の値に保つ、すなわち、tanω=a1/f1=a2/f2を満足するように撮像レンズの焦点距離と光軸可動レンズの光軸のシフト量を設定すれば良いことが分かる。上述の条件を常に満たすようにズーム操作を行いつつ撮像を行えば、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見える動画3D画像を撮像することが可能となる。
【0110】
<この発明の実施形態の光学式輻輳角調整3D画像撮像方法>
図8及び図9を参照して、この発明の実施形態の光学式輻輳角調整3D画像撮像方法について説明する。この説明に当たっては、特にこの発明の実施形態の3D画像撮像装置が特徴的に具えている輻輳角調整部が中心的に重要な役割を果たすので、輻輳角調整部の構造及び動作について詳しく説明する。
【0111】
図8は、この発明の実施形態の3D画像撮像方法についての説明に供する図であって、右目用画像を撮像する部分と左目用画像を撮像する部分とが対称の構造で構成されていることを強調して示してある。なお、それぞれのビデオカメラ自体に設けられているモニター(出力部)と操作装置(入力部)は図示を省略してある。
【0112】
右目用画像を撮像する部分とは、第1ビデオカメラ16、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第1輻輳角調整部10R、第1レンズ位置検出器36R及び第1レンズ駆動回路38Rを具えて構成されている部分を指す。一方、左目用画像を撮像する部分とは、第2ビデオカメラ18、レンズ位置伝達機構42L、レンズ駆動伝達機構44L、第2輻輳角調整部10L、第2レンズ位置検出器36L及び第2レンズ駆動回路38Lを具えて構成されている部分を指す。
【0113】
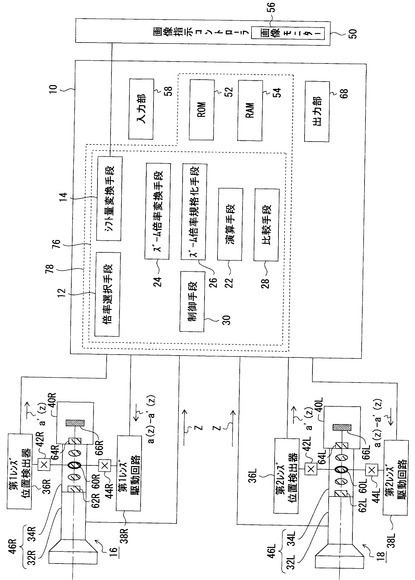
図9も、この発明の実施形態の3D画像撮像方法についての説明に供する図であるが、コンピューターにおけるソフトウエア処理によって実現される機能手段を一括して示してある。これら機能手段は輻輳角調整部10として、倍率選択手段12、シフト量変換手段14、演算手段22、ズーム倍率変換手段24、ズーム倍率規格化手段26、及び比較手段28を具えており、これらの機能手段のそれぞれとは、右目用画像を撮像する部分が具える第1輻輳角調整部10Rの第1倍率選択手段12R、第1シフト量変換手段14R、第1演算手段22R、第1ズーム倍率変換手段24R、第1ズーム倍率規格化手段26R、及び第1比較手段28Rと、左目用画像を撮像する部分が具える第2輻輳角調整部10Lの第2倍率選択手段12L、第2シフト量変換手段14L、第2演算手段22L、第2ズーム倍率変換手段24L、第2ズーム倍率規格化手段26L、及び第2比較手段28Lとして機能動作する。
【0114】
上述のそれぞれの機能手段の説明は、主に図9を参照して行い、右目用画像を撮像する部分及び左目用画像を撮像する部分でそれぞれ同様に実行されるソフトウエア処理の機能手段の重複する説明を避けることとする。例えば、ズーム倍率変換手段24として説明する内容は、第1ズーム倍率変換手段24R及び第2ズーム倍率変換手段24Lに対する説明であるものと了解されたい。
【0115】
図8に示すように、この発明の実施形態の3D画像撮像装置は、右目用画像を撮像する部分が、第1ビデオカメラ16、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第1レンズ位置検出器36R、第1レンズ駆動回路38R、及び輻輳角調整部10Rを具えて構成されている。一方左目用画像を撮像する部分が、第2ビデオカメラ18、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第2レンズ位置検出器36L、第2レンズ駆動回路38L、及び輻輳角調整部10Lを具えて構成されている。
【0116】
更に、後述する被写体の選択すなわち輻輳点を特定し、あるいは右目用画像を撮像する部分と左目用画像を撮像する部分の光学的非対称を修正指示する機能を有する画像指示コントローラ50を具えている。
【0117】
画像指示コントローラ50には、詳細は省略するが周知の画像モニター56を具えている。あるいは、画像モニター56は画像指示コントローラ50とは一体化して構成する必要はなく別々に設けてもよい。また、画像モニター56は、右目用画像と左目用画像とを別々に表示する表示装置と、右目用画像中の画像と左目用画像中の被写体の画像を合致させて3D合成画像を表示する表示装置とを具えていることが望ましい。
【0118】
画像指示コントローラ50は、多くの場合ビデオエンジニアによって操作される。そして、画像指示コントローラ50によって、第1ビデオカメラ16及び第2ビデオカメラ18を操作するカメラオペレーターに被写体の特定指示を与え、また輻輳角調整部10R及び10Lに光学的非対称を修正指示する信号を送って右目用画像を撮像する部分と左目用画像を撮像する部分の光学的非対称の修正を行うことが可能である。
【0119】
ビデオエンジニアは、後述するように、画像モニター56を見ながら、右目用画像及び左目用画像中の被写体の画像を合致させて合成画像を形成することによって、輻輳点の設定を指示することができる。
【0120】
まず、図8を参照して、この発明の実施形態の3D画像撮像装置の右目用画像を撮像する部分の構成及びその機能について説明する。
【0121】
第1ビデオカメラ16は、カメラレンズ32Rとアタッチメントレンズ34Rとを結合させて構成された第1撮像レンズ46Rがビデオカメラ筺体40Rに装着されて構成されている。第1撮像レンズ46Rは、ズーム位置を与えるパラメータzを出力するズーム位置信号出力部(図示を省略してある。)と、光軸可動レンズのレンズ位置を検出する第1レンズ位置検出器36Rと、光軸可動レンズのレンズ位置を変更させる第1レンズ駆動回路38Rとが装着されて具えられている。
【0122】
ズーム位置信号出力部は、ズーム位置、すなわち焦点距離を電気信号に変換して出力する機能を有しており、上述したようにPSDを用いて構成されている。具体的には、カメラレンズ32Rを構成しているレンズあるいはレンズ群の光軸上での位置の移動に基づいて決定する焦点距離と、これらのレンズあるいはレンズ群を移動させるためのカムの回転量との関係を予めカメラレンズ32Rの仕様書等から把握しておき、ズーム位置信号出力部を構成するPSDから出力される電気信号であるズーム位置を与えるパラメータzの値と、カメラレンズ32R焦点距離f(z)との関係をテーブル形式で焦点距離テーブルとして確定しておく。これら確定された焦点距離テーブル等は、後述するように記憶装置に書き込まれる。
【0123】
アタッチメントレンズ34Rに含まれる光軸可動レンズ(図2及び図3に示した光軸可動レンズ60に相当する。)は、レンズ位置伝達機構42Rを介して第1レンズ位置検出器36Rに結合されており、また、レンズ駆動伝達機構44Rを介して第1レンズ駆動回路38Rに結合されて構成されている。
【0124】
アタッチメントレンズ34Rに含まれる光軸可動レンズの位置は、レンズ位置伝達機構42Rによって認識されて第1レンズ位置検出器36Rに伝達される。また、第1レンズ駆動回路38Rからシフト量が第1レンズ位置伝達機構42Rに伝達されこの第1レンズ位置伝達機構42Rによってこの光軸可動レンズの位置が変化させられる。
【0125】
第1レンズ位置伝達機構42Rは周知のステップモーター等を利用して実現可能であり、第1レンズ駆動回路38Rはこのステップモーターを駆動するためのパルス信号を生成してステップモーターを駆動する構成とする。第2レンズ駆動回路38Lび第2レンズ位置伝達機構42Lについても同様である。
【0126】
第1輻輳角調整部10Rは、第1倍率選択手段12Rと、第1シフト量変換手段14Rと、第1ズーム倍率変換手段24Rと、第1ズーム倍率規格化手段26Rと、第1演算手段22Rと、第1比較手段28Rとを具えて構成されている。
【0127】
第1倍率選択手段12Rは、第1撮像レンズ46Rのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定する。第1倍率選択手段12Rは、例えばソフトウエアによって実現することが可能であり、後述するように第1及び第2輻輳角制御装置として利用するパーソナルコンピュータ(PC)にソフトウエアとして組み込んで、このPCの入力部、例えばキーボードから入力する構成とすることができる。この基準ズーム比mの設定は、例えばビデオエンジニアによって、第1撮像レンズ46Rが具えているカメラレンズ32Rの基準ズーム比mをPCのキーボードから入力することによって設定される。
【0128】
基準ズーム比mは、第1撮像レンズ46Rが具えるカメラレンズ32Rのカタログ値を採用する必要は必ずしもなく、各撮像に応じて、カタログ値の範囲内でカメラレンズ32Rのテレ端における焦点距離ftとワイド端における焦点距離fwとを任意に設定し、この設定された焦点距離ftと焦点距離fwとの比を基準ズーム比mとして設定しても良い。この場合、以後の操作において、テレ端及びワイド端に対応するそれぞれの焦点距離は、任意に設定した焦点距離を一貫して用いる必要がある。
【0129】
第1シフト量変換手段14Rは、輻輳点に対応する第1撮像レンズ46Rのテレ端におけるシフト量atを出力する。撮像開始に当たり最初に輻輳点を設定した時点でのカメラレンズ32Rの焦点距離とこのシフト量atとの関係は、シフト量テーブルの形式で初期条件として確定しておく。
【0130】
第1ズーム倍率変換手段24Rは、第1撮像レンズ46Rが具えているカメラレンズ32Rの焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力する。上述したように、PSDを備えて構成されているカメラレンズ32Rのズーム位置信号出力部から出力されるズーム位置を与えるパラメータzの値と、カメラレンズ32Rの距離との関係は予めテーブル形式で焦点距離テーブルとして確定されているので、この焦点距離テーブルに基づきズーム比m(z)が確定される。すなわち、ワイド端におけるパラメータzの値をzwとした場合、m(z)=f(z)/fw=f(z)/f(zw)と求まる。
【0131】
第1ズーム倍率規格化手段26Rは、第1ズーム倍率変換手段24Rから出力されるズーム比m(z)と、第1倍率選択手段12Rから出力される基準ズーム比mとの比m(z)/mを算出して出力する。比m(z)/mは、焦点距離テーブルを参照してm(z)/m={f(z)/fw)}/(ft/fw)=f(z)/ftと求まる。ftは、テレ端におけるパラメータzの値をztとした場合f(zt)である。ここで、f(z)、f(zt)及びf(zw)は、上述の焦点距離テーブルから読み出すことが可能である。実際の輻輳角調整ステップを実現する際には、上述したように基準ズーム比mが予め設定されて確定されているので、第1ズーム倍率規格化手段26Rでは、m(z)=f(z)/f(zw)で与えられるズーム比の変換を行うだけでよい。すなわち、ここでは、テレ端での焦点距離ft及びワイド端での焦点距離fwの値そのものを使わなくとも、m(z)=f(z)/f(zw)で与えられるズーム比の変換を行うだけで済む。
【0132】
第1演算手段22Rは、第1ズーム倍率規格化手段26Rから出力される比m(z)/mと、第1シフト量変換手段14Rから出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量a(z)=at×m(z)/mを算出して出力する。シフト量atは、上述したように、シフト量テーブルの形式でカメラレンズ32Rの焦点距離f(z)の形式のシフト量テーブルで確定されているので、このシフト量テーブルからパラメータzに対応させて確定することが可能である。
【0133】
第1レンズ位置検出器36Rは、光軸可動レンズのシフト量a'(z)を検出する。第1レンズ位置検出器36RもPSDを用いて周知の方法で形成することが可能である。第1レンズ位置伝達機構42Rは、第1レンズ位置検出器36Rから出力される電気信号に従ってシフト量a'(z)を電気信号の形式で出力される電子回路を形成すれば実現する。第2レンズ位置検出器36L及び第2レンズ位置伝達機構42Lについても同様である。
【0134】
第1比較手段28Rは、第1レンズ位置検出器36Rから出力されるシフト量a'(z)と、第1演算手段22Rから出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように光軸可動レンズをシフトさせる指示信号を出力する。
【0135】
第1レンズ駆動回路38Rは、第1比較手段28Rから出力された指示信号a(z)-a'(z)に基づいて光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する。
【0136】
第2撮像カメラ46L、第2レンズ位置伝達機構42L、第2レンズ駆動伝達機構44L、第2輻輳角調整部10L、第2レンズ位置検出器36L及び第2レンズ駆動回路38Lを具えて構成されている左目用画像を撮像する部分については、上述の右目用画像を撮像する部分と同一であるので、その構造及び動作についての説明は省略する。また、第2輻輳角調整部10Lの構成要素である第2倍率選択手段12L、第2シフト量変換手段14L、第2ズーム倍率変換手段24L、第2ズーム倍率規格化手段26L、第2演算手段22L、及び第2比較手段28Lのそれぞれの機能についても、第1輻輳角調整部10Rが具えている対応する機能と同一であるので、その構造及び動作についての説明は省略する。
【0137】
<この発明の実施形態の光学式輻輳角調整3D画像撮像方法の具体例>
以下、図9及び図10を参照して、この発明の実施形態の3D画像撮像方法の一例を具体的に説明する。図9はソフトウエア処理によって実現される機能手段を一括して示した、この発明の実施形態の3D画像撮像方法についての説明に供する図であり、図10はこの発明の実施形態の3D画像撮像方法のフローチャートである。
【0138】
まず、図9を参照して、この発明の実施形態の3D画像撮像装置のソフトウエア処理によって実現される機能手段に着目して輻輳角調整部10の構成及びその機能ついて説明する。
【0139】
輻輳角調整部10は、輻輳点に対応して定まる光軸可動レンズのシフト量とカメラレンズの焦点距離との比が一定値に保たれる条件で、第1及び第2撮像レンズの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて光軸可動レンズの光軸のシフト量を調整する機能を有し、以下のとおり構成されている。
【0140】
輻輳角調整部10は、MPU(Micro Processing Unit)78、入力部58及び出力部68を具えて構成される周知のPC等を用いることができる。入力部58はPCに通常用いられるキーボード等の任意好適な公知の入力装置を具え、及び、出力部68はディスプレイ等の任意好適な出力装置を具えて構成される。MPU 78は、周知の構成とすることができ、ここでは、CPU(Central Processing Unit)76と、メモリとしてのROM(Read Only Memory)52及びRAM(Random Access Memory)54を具える構成としている。
【0141】
ここでは、輻輳角調整部10はこの発明の実施形態の3D画像撮像装置を構成する第1及び第2ビデオカメラと一体化されて構成されており、撮像指示コントローラ50が輻輳角調整部10から離れた場所に通信形態RS422Aによって接続されて配置されているものとする。また、輻輳角調整部10を含め第1及び第2ビデオカメラと一体化されて構成された3Dビデオカメラ本体部をカメラオペレーターが操作し、撮像指示コントローラ50をビデオエンジニアが操作しているものと仮定する。
【0142】
CPU 76が具える制御手段30は、例えばROM 52に読み出し自在に記録されているプログラムを読み出して当該プログラムを実行することにより、CPU 76の機能手段として、倍率選択手段12、シフト量変換手段14、ズーム倍率変換手段24、ズーム倍率規格化手段26、演算手段22、及び比較手段28を実現する。
【0143】
つづいて、図9を参照しつつ図10のフローチャートに従って、この発明の実施の形態の3D画像撮像方法の具体的例について説明する。
【0144】
3D画像撮像の撮像の開始に当たり、輻輳角調整部10を含め第1及び第2ビデオカメラと一体化されて構成された3Dビデオカメラ、及び撮像指示コントローラ50の電源をON状態にして撮像開始状態を設定する。このとき、制御手段30に、ROM 52に読み出し自在に記録されているプログラムが読み出され、CPU 76では倍率選択手段12、シフト量変換手段14、ズーム倍率変換手段24、ズーム倍率規格化手段26、演算手段22、及び比較手段28が実現可能な状態に設定される。
【0145】
次に、カメラオペレーターによって、第1及び第2ビデオカメラを被写体に向けて動作させ、入力部58を介して倍率選択手段12に第1及び第2撮像レンズの双方のカメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftの値を入力し、倍率選択手段12においてこれらft及びfwからその比m(=ft/fw)を設定するステップS1が実行される。ステップS1において、これらft及びfwと、この比mの値はRAM 54に記憶される。
【0146】
ROM 52あるいはRAM 54には、カメラレンズ32を構成しているレンズあるいはレンズ群の光軸上での位置の移動に基づいて決定する焦点距離と、これらのレンズあるいはレンズ群を移動させるためのカムの回転量との関係を予めカメラレンズ32の仕様書等で与えられているデータに基づき、ズーム位置信号出力部を構成するPSDから出力される電気信号であるズーム位置を与えるパラメータzの値とカメラレンズ32の焦点距離f(z)との関係を与える焦点距離テーブルが記憶されている。カメラレンズ32を頻繁に交換して利用することなく撮像作業において恒常的に同一のものを使用するのであれば、この焦点距離テーブルはROM 52に記憶させておくのが好適である。
【0147】
カメラオペレーターは、第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップS2を実行する。
【0148】
ビデオエンジニアは、撮像指示コントローラ50を、画像モニター56を見ながら操作して右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成する輻輳点を設定するステップS3を実行する。このステップS3において、第1及び第2撮像レンズの視線方向が輻輳点に対して対称な方向に向くように撮像指示コントローラ50からシフト量変換手段14に指示が与えられる。
【0149】
この指示は、出力部68に表示される構成としておくのが便利である。また、このとき第1及び第2撮像レンズの視線方向が輻輳点に対して非対称な方向に向いている場合は、輻輳角調整部10に光学的非対称を修正指示する信号を撮像指示コントローラ56から送って光学的非対称を修正する。
【0150】
輻輳点を撮像指示コントローラ56から指示すると撮像レンズが具えている光軸可動レンズの位置が確定され、すなわちこの光軸可動レンズの光軸のシフト量が確定される。第1及び第2撮像レンズの構造上の非対称性が無ければ、第1及び第2撮像レンズが具える光軸可動レンズのシフト量を等しく設定すれば良いこととなるが、厳密に機械的な同一性を確保することは一般に難しい。そこで、輻輳角調整部10に撮像指示コントローラ56から微調整信号を送り、第1及び第2撮像レンズの光学的非対称を修正する。
【0151】
ステップS3が終了したら、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの光軸可動レンズのシフト量atを第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zと共に確定させるステップS4が実行される。
【0152】
第1及び第2撮像レンズをそれぞれテレ端に設定した状態で、第1及び第2撮像レンズのそれぞれのズーム位置信号出力部74から出力されるパラメータの値zと、第1及び第2撮像レンズのそれぞれのレンズ位置検出器36から出力される光軸可動レンズのシフト量atの値とが輻輳角調整部10のCPU76によって読み取られて、パラメータの値zとシフト量atの値とが確定される。
【0153】
このステップS4が実行されることによって、撮像開始の最初の段階で輻輳点を設定した時点でのカメラレンズ32Rの焦点距離とこのシフト量atとの関係がシフト量テーブルの形式で作成されてRAM 54に記憶される。
【0154】
ステップS4が実行されたらそのまま撮像を続けてもよいが、ズーム操作を行う必要に応じて次のステップS5に進む。
【0155】
カメラペレーターは、ビデオエンジニアの指示等必要に応じてズーム操作を行うがこの操作がステップS5である。すなわち、ステップS5は、第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップである。
【0156】
ステップS5に続いてステップS5によって変化された第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値f(z)を読み込むステップS6が行われる。ステップS6は、第1及び第2撮像レンズがそれぞれ具えているズーム位置信号出力部から現在のズーム位置を与えるパラメータzが出力され、このパラメータzがズーム倍率変換手段24に読み込まれるステップである。
【0157】
ズーム倍率変換手段24がROM 52に記憶されている焦点距離テーブルを読み出すことによって、パラメータzの値と、カメラレンズ32の焦点距離f(z)との関係が把握される状態となる。
【0158】
ズーム倍率変換手段24によって、ステップS6に続いてカメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成するステップS7が実行される。このm(z)テーブルはRAM 54に記憶される。
【0159】
ズーム倍率規格化手段26によって、ステップS1で書き込まれたmの値及び上述のm(z)テーブルがRAM 54から読み出され、m(z)とmとの比m(z)/mを算出してRAM 54に記憶するステップS8が実行される。
【0160】
演算手段22によって、RAM 54からステップS4で確定されたatの値、焦点距離テーブルが読み出され、ズーム位置信号出力部から出力されるパラメータがzであるときのカメラレンズのシフト量a(z)をa(z)=at×m(z)/mとして算出してRAM 54に記憶するステップS9が実行される。
【0161】
倍率選択手段12によって、レンズ位置検出器36から出力される光軸可動レンズのシフト量a'(z)を読み込んでRAM 54に記憶するステップS10が実行される。
【0162】
比較手段28によって、ステップS9で算出されたシフト量a(z)をRAM 54から読み出すと共に、ステップS10で読み込まれたシフト量a'(z)とをRAM 54から読み出して、両シフト量が等しくなるように、光軸可動レンズの光軸の位置を調整するステップS11が実行される。この比較手段28では、a'(z)をa(z)に近づけるけるための周知のアルゴリズムを使って実行することが可能である。
【0163】
例えば、シフト量差|a(z)-a'(z)|を比較手段28からレンズ駆動回路に供給して動作させ、これにより光軸可動レンズを移動させる。この光軸可動レンズの位置をレンズ位置検出器によって検出して新たなa'(z)を求め、この値を比較手段28に送る。これをシフト量差|a(z)-a'(z)|が0となるまでフィードバックさせて処理する。
【0164】
以上ステップS11が終了した時点で、設定された焦点距離に対して光軸可動レンズの位置が被写体の画像がスクリーン面上に定位された状態が実現するように設定されている。従って、この状態でしばらく撮像を続けることが可能である。すなわち、ステップS11でa(z)=a'(z)と調整された状態で、第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップS12を実行することができる。
【0165】
撮像を続行中、すなわちステップS12を実行中に、ビデオエンジニアあるいはカメラペレーターの意思によって、再度第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップS13が実行される。
【0166】
また、撮像対象となる被写体を変更して、右目用画像及び左目用画像における変更した被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップS14、撮像操作を終了させるか否かを判断するステップS15、及び撮像作業を終了させるステップS16が用意されている。これらのステップにおける判断は、例えば、ビデオエンジニアによって行われる。
【0167】
ステップS13において再度のズーム操作を行うと判断されたときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、ステップS14において撮像対象となる被写体を変更すると判断されたときはステップS3に進み、撮像対象となる被写体を変更しないと判断されたときはステップS15に進み、ステップS15において撮像操作を終了させないと判断された場合はステップS12に進む。そして、ステップS15において撮像操作を終了させると判断された場合はステップS16に進むことによってこの発明の3D画像撮像方法は完了する。
【符号の説明】
【0168】
10:輻輳角調整部
10R:第1輻輳角調整部
10L:第2輻輳角調整部
12:倍率選択手段
12R:第1倍率選択手段
12L:第2倍率選択手段
14:シフト量変換手段
14R:第1シフト量変換手段
14L:第2シフト量変換手段
16、100R、102R:第1ビデオカメラ
18、100L、102L:第2ビデオカメラ
22:演算手段
22R:第1演算手段
22L:第2演算手段
24:ズーム倍率変換手段
24R:第1ズーム倍率変換手段
24L:第2ズーム倍率変換手段
26:ズーム倍率規格化手段
26R:第1ズーム倍率規格化手段
26L:第2ズーム倍率規格化手段
28:比較手段
28R:第1比較手段
28L:第2比較手段
30:制御手段
32、32R、32L:カメラレンズ
34、34R、34L:アタッチメントレンズ
36:レンズ位置検出器
36R:第1レンズ位置検出器
36L:第2レンズ位置検出器
38R:第1レンズ駆動回路
38L:第2レンズ駆動回路
40、40R、40L:ビデオカメラ筺体
42R、42L:レンズ位置伝達機構
44R、44L:レンズ駆動伝達機構
46:撮像レンズ
46R:第1撮像レンズ
46L:第2撮像レンズ
48:カメラ用三脚
50:画像指示コントローラ
52:ROM
54:RAM
56:画像モニター
58:入力部
60:光軸可動レンズ
62、64:結合部
66、66R、66L:結像面
68:出力部
70、70':被写体
72R、72L:レンズアダプター
74:ズーム位置信号出力部
76:CPU
78:MPU
【技術分野】
【0001】
この発明は、2台のビデオカメラを並列に配置して右目用画像と左目用画像を撮像することによって立体画像を撮像する立体画像撮像装置に関する。
【背景技術】
【0002】
近年、平面画像(以後、2D画像ということもある。)の高精細化に止まらず、立体画像(以後、3D画像ということもある。)についての関心が高まっている。例えば、2D画像を撮像する2Dカメラを2台並列に配置し、一方の2Dカメラで右目用画像を撮像し、他方の2Dカメラで左目用画像を撮像し、3D画像を再現可能な状態に取り込む3D画像撮像装置が盛んに研究されている。
【0003】
人間は、被写体までの距離に応じて両眼の視線の方向を変えて、すなわち、被写体と両眼とのなす角である人間の目の輻輳角(convergence angle)を調整して、左右の眼でそれぞれ画像を取り込んでいる。従って、3D画像撮像装置による撮像を行う際にも、人間が両眼によって認識する3D画像とあまり相違しない3D画像を撮像するためには、3D画像撮像装置を構成するそれぞれのビデオカメラの撮像レンズの光軸のなす角を調整する必要がある。以後、3D画像撮像装置を構成するそれぞれの撮像レンズの光軸のなす角のことを3D画像撮像装置の輻輳角、あるいは単に輻輳角というものとする。
【0004】
被写体が移動することによって被写体と3D画像撮像装置との距離が変化した場合、あるいはズーム操作をして3D画像撮像装置の撮像レンズの焦点距離を変化させた場合、それぞれの変化に応じて3D画像撮像装置の輻輳角を調整しなければ、以下のような事態が生じる。すなわち、この3D画像撮像装置で撮像された影像がスクリーン等の表示面に投影されて人間によって3D画像として観賞される際に、観賞する人間にとって、著しい目の疲れが生じたり、立体感に不自然さが感じられたり、あるいは立体視ができない等の不都合が生じる。
【0005】
実際の3D画像撮像装置による撮像は、撮像された画像をスクリーン等に映し出す場合にスクリーン面に定位させたい被写体を決めて、この被写体に左右の2Dカメラの撮像レンズの視線の交点を合せて行われる。ここで、左右の2Dカメラの撮像レンズの視線の交点を輻輳点という。
【0006】
従来、3D画像撮像装置の輻輳角の調整は3D画像撮像装置の操作者によって撮像の目的物として特定した被写体の動き、あるいは撮像レンズの焦点距離の変更に対応させて手動で行われていた(特許文献1及び2参照)。
【0007】
特許文献1に開示された3D画像撮像装置は、2台の2Dカメラの向きを調整するための機械的な機構を具えており、この機構を使って手動で2Dカメラの向きが調整され輻輳角が調整される構成とされている。
【0008】
また、特許文献2に開示された3D画像撮像装置にあっては、2台の2Dカメラの向きを電動機構によって調整可能である構成とされている。ただし、特許文献2に開示された3D画像撮像装置においても、被写体の移動あるいは3D画像撮像装置の撮像レンズの焦点距離の変化に応じて3D画像撮像装置の輻輳角が自動的に調整される機構は具えられていない。
【0009】
そこで、従来から、被写体から3D画像撮像装置までの距離の変化に対応させて輻輳角を自動的に調整する機能が具えられた3D画像撮像装置が開発されてきた。
【0010】
例えば、被写体から3D画像撮像装置までの距離の変化に対応させて輻輳角を自動的に調整する機能が具えられた輻輳角追尾式立体撮像カメラが提案されている(特許文献3参照)。この輻輳角追尾式立体撮像カメラにおいては、発光部と受光部とが具えられ、発光部から出力される赤外光が被写体に当たりこの被写体から反射された反射赤外光を受光部で受光する構成とされている。そして、被写体の動きに対応して受光部に入射される反射赤外光の入射角度から被写体までの距離を計測しこの距離に基づいて輻輳角が制御される。輻輳角の制御は、左右の2Dカメラの向きを調整することによって行われる。
【0011】
上述した特許文献1〜3に開示されている3D画像撮像装置は、いずれも左右の2Dカメラを回転させ、すなわち左右の2Dカメラの姿勢(2Dカメラの視線方向)を機械的に変化させることによって輻輳角を調整する方式である。この方式の3D画像撮像装置によれば、3D画像撮像装置との距離が変動せず被写体が静止している場合には、輻輳角を固定した状態でズーム操作を行っても、画像面上で被写体が定位した状態が保たれる。しかしながら、機械的に2Dカメラの姿勢を変化させる機構が大掛かりとなり、3D画像撮像装置のコンパクト化が難しい。
【0012】
一方、コンパクトな3D画像撮像装置を実現するには、輻輳角の制御を光学的な手段で行う構成とするのが望ましい。
【0013】
そこで、対物レンズ系と中間レンズ系と、この両レンズ系の間に可制御光偏光装置を具え、輻輳角の制御を光学的な手段で実現させたステレオカメラシステムが提案されている(特許文献4又は5参照)。
【0014】
特許文献4には、被写体までの距離を測距する測距装置と、この測距された距離に応じて輻輳角を自動的に調整する輻輳角調整機構とを具えたステレオカメラが開示されている。このステレオカメラによれば、測距装置によってステレオカメラと被写体までの距離が求められ、輻輳角調整機構によってこの距離に基づいて3D画像撮像装置の輻輳角が自動的に制御される。輻輳角の制御は、角度可変プリズムを用いて左右の2Dカメラの撮像レンズの光軸の向きを調整する、あるいは、左右の2Dカメラの撮像レンズを構成するレンズ群の一部のレンズの光軸を平行移動させて調整するといった光学的手段によって行われる。
【0015】
また、特許文献5には、中間レンズ系で形成される画像に基づいてステレオカメラと被写体までの距離が自動的に求められ、輻輳角調整機構によってこの距離に基づいて輻輳角が制御される方式のステレオカメラシステムが開示されている。このステレオカメラシステムでは、輻輳角の制御は、可制御光偏光装置が具える角度可変プリズム、あるいは光軸をシフトさせることが可能に構成された光軸可動レンズによる光学的な手段を用いて行われる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開昭59-192239号公報
【特許文献2】特開平2-75293号公報
【特許文献3】特開平1-93727号公報
【特許文献4】特開2001-22014号公報(特許第4428761号公報)
【特許文献5】特開平9-185139号公報(特許第3806198号公報)
【発明の概要】
【発明が解決しようとする課題】
【0017】
上述した特許文献4に開示されたステレオカメラは、静止画を撮像することを目的とした3D画像撮像装置であるので、ズーム操作によって引き起こされる3D画像の輻輳点に対応する被写体画像の位置の変動の問題は生じない。一方、特許文献5に開示されたステレオカメラシステムは、ステレオカメラシステムと被写体との距離に応じて輻輳角を光学的手段によって設定する機構を具えているが、被写体が定位した状態でズーム操作を行う機構を具えていない。
【0018】
輻輳角の制御を光学的な手段で行う構成とされた3D画像撮像装置によって、3D画像撮像装置の輻輳角を固定した状態で、ズーム操作を行いつつ動画である3D画像を撮像すると、撮像対象である被写体の画像を定位した状態で視覚することが困難となる。これは、ズーム操作によって3D画像撮像装置の結像面(画像面)上で被撮像点の位置がシフトするためである。
【0019】
例えば、位置を移動することが本来あり得ない建物を被写体としてこの被写体を拡大あるいは縮小して撮像し、撮像された画像(被撮像点)をスクリーン等に映し出して観る場合を想定すると次のような状態が生ずる。スクリーン等に映し出された建物を見ている人には、画像の拡大あるいは縮小に伴ってこの建物が近づいてきたりあるいは遠退いたりする現象に違和感を感ずる。すなわち、スクリーン面に建物が定位した状態で拡大あるいは縮小がなされるのではなく、建物を注目してみている人には、建物がスクリーン面の前に飛び出したりあるいは後ろに引っ込んだりする感覚を伴うからであり、このために観ている3D画像に対する違和感が生じる。
【課題を解決するための手段】
【0020】
この発明の発明者は、ズーム操作中のそれぞれの時点における撮像レンズの焦点距離と被撮像点のシフト量との比が一定値に保たれる条件で輻輳角を調整すれば、上述の課題が解決される、すなわち、上述の条件を満足するように輻輳角を調整しつつ撮像すれば、注目している物体(被写体)が空間の一点に固定された状態、すなわちスクリーン面に定位された状態で拡大されあるいは縮小される3D画像を撮像することが可能となるとの認識に至った。ここで、被撮像点とは輻輳点に対応する撮像レンズの像面上の共役点(conjugate point)を指す。また、被撮像点のシフト量とは、3D画像撮像装置を構成する左右の2Dカメラの2D画像の結像面におけるズーム操作中のそれぞれの時点における被撮像点と2Dカメラの撮像レンズの光軸との距離として定義される量である。
【0021】
そこで、この発明の目的は、ズーム操作しつつ撮像しても、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見ることができる、動画3D画像を撮像することが可能である光学式輻輳角調整3D画像撮像装置、及びこの光学式輻輳角調整3D画像撮像装置を用いて動画の3D画像を撮像する方法を提供することにある。
【0022】
上述の理念に基づくこの発明の第1の要旨によれば、以下の光学式輻輳角調整3D画像撮像装置が提供される。なお、この発明の光学式輻輳角調整3D画像撮像装置を構成する右目用画像と左目用画像とをそれぞれ撮像するビデオカメラは互いに同一構造の2Dビデオカメラである。
【0023】
この発明の光学式輻輳角調整3D画像撮像装置は、右目用画像を撮像する第1ビデオカメラと、左目用画像を撮像する第2ビデオカメラと、輻輳角調整部とを具えている。
【0024】
第1ビデオカメラは第1撮像レンズを具え、第2ビデオカメラは第2撮像レンズを具えており、第1及び第2撮像レンズのそれぞれは、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとを、カメラレンズの光軸に対して光軸可動レンズの光軸が平行な状態でシフトさせることが可能な状態に結合されて構成されている。
【0025】
輻輳角調整部は、被写体に向けられた第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、光軸可動レンズのシフト量とカメラレンズの焦点距離との比が一定値に保たれる条件で、第1及び第2撮像レンズがそれぞれ具えているカメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、第1および第2撮像レンズが具えている双方の光軸可動レンズの光軸のシフト量を調整する。
【0026】
上述の輻輳角調整部は、例えば、ズーム操作のそれぞれの時点におけるシフト量a(z)と、焦点距離f(z)との比a(z)/f(z)が、a(z)/f(z)=aw/fw=at/ft(=一定値)で与えられる条件でシフト量a(z)を調整する構成とするのが良い。
【0027】
ここで、zは、カメラレンズの焦点距離を規定するズーム位置を与えるパラメータである。fwはカメラレンズのワイド端での焦点距離を表し、ftはテレ端での焦点距離を表す。awはカメラレンズのワイド端でのシフト量を表し、atはテレ端でのシフト量を表す。f(z)及びa(z)はそれぞれzの関数として表したズーム操作に伴う焦点距離及びシフト量を表している。
【0028】
第1及び第2撮像レンズのそれぞれは、ズーム位置を与えるパラメータzを出力するズーム位置信号出力部と、レンズ位置検出器と、レンズ駆動回路とを具えて構成するのが好適である。
【0029】
輻輳角調整部は、倍率選択手段と、シフト量変換手段と、ズーム倍率変換手段と、ズーム倍率規格化手段と、演算手段と、比較手段とを具えて構成するのが好適である。
【0030】
ここで、倍率選択手段は、第1及び第2撮像レンズのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定する。
【0031】
シフト量変換手段は、輻輳点に対応する第1及び第2撮像レンズのテレ端におけるシフト量atを出力する。
【0032】
ズーム倍率変換手段は、焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力する。
【0033】
ズーム倍率規格化手段は、ズーム倍率変換手段から出力されるズーム比m(z)と、倍率選択手段から出力される基準ズーム比mとの比m(z)/mを算出して出力する。
【0034】
演算手段は、ズーム倍率規格化手段から出力される比m(z)/mと、シフト量変換手段から出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量a(z)で与えられるat×m(z)/mを算出して出力する。
【0035】
レンズ位置検出器は、光軸可動レンズのシフト量a'(z)を検出する。
【0036】
比較手段は、レンズ位置検出器から出力されるシフト量a'(z)と、演算手段から出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように光軸可動レンズをシフトさせる指示信号を出力する。
【0037】
前レンズ駆動回路は、比較手段から出力された指示信号に基づいて光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する。
【0038】
この発明の第2の要旨によれば、この発明の3D画像撮像方法を提供することにある。
【0039】
この発明の3D画像撮像方法は、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロック(GENLOCK:Generator lock)させてそれぞれ撮像することによって3D画像を撮像する3D画像撮像方法であり、以下の合成画像形成ステップと輻輳角調整ステップとを含んで構成される。
【0040】
これらのステップは、例えば、以下のステップS1〜ステップS16を含んで構成され、合成画像形成ステップは、右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成するステップ、例えば、ステップS3〜ステップS4であり、また、輻輳角調整ステップは、上述の輻輳角調整部において実行されるステップ、例えば、ステップS6〜ステップS11である。
【0041】
ステップS1は、第1及び第2撮像レンズの双方のカメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftとの比m(=ft/fw)を設定し、この比mを記憶装置に書き込むステップである。
【0042】
ステップS2は、第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップである。
【0043】
ステップS3は、右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成するステップである。
【0044】
ステップS4は、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの光軸可動レンズのシフト量atを、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値と共に確定させるステップである。
【0045】
ステップS5は、第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップである。
【0046】
ステップS6は、ステップS5によって変化された第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値を読み込むステップである。
【0047】
ステップS7は、カメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成するステップである。
【0048】
ステップS8は、比mとm(z)テーブルとを記憶装置から読み出して、m(z)とmとの比m(z)/mを算出するステップである。
【0049】
ステップS9は、パラメータの値がzであるときのカメラレンズのシフト量a(z)をa(z)=at×m(z)/mとして算出するステップである。
【0050】
ステップS10は、光軸可動レンズのシフト量a'(z)を読み込むステップである。
【0051】
ステップS11は、ステップS9で算出されたシフト量a(z)とステップS10で読み込まれたシフト量a'(z)とが等しくなるように、光軸可動レンズの光軸の位置を調整するステップである。
【0052】
ステップS12は、ステップS11でa(z)=a'(z)と調整された状態で、第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップである。
【0053】
ステップS13は、再度第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップである。
【0054】
ステップS14は、撮像対象となる被写体を変更して、右目用画像及び左目用画像における変更した被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップである。
【0055】
ステップS15は、撮像操作を終了させるか否かを判断するステップである。
【0056】
ステップS16は、撮像作業を終了させるステップである。
【0057】
ステップS13において、再度のズーム操作を行うと判断したときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、ステップS14において、撮像対象となる被写体を変更すると判断したときはステップS3に進み、撮像対象となる被写体を変更しないと判断したときはステップS15に進み、ステップS15において、撮像操作を終了させないと判断した場合はステップS12に進み、撮像操作を終了させると判断した場合はステップS16に進むことによってこの発明の3D画像撮像方法は完了する。
【0058】
以後の説明において、第1ビデオカメラと第2ビデオカメラとを区別して説明する必要がない場合は単にビデオカメラと記述し、また、第1撮像レンズと第2撮像レンズとを区別して説明する必要がない場合は同様に単に撮像レンズと記述することもある。
【発明の効果】
【0059】
この発明の光学式輻輳角調整3D画像撮像装置によれば、輻輳角調整部を具えることによって、ズーム操作中のそれぞれの時点における撮像レンズの焦点距離と、ビデオカメラの結像面におけるズーム操作中のそれぞれの時点における光軸可動レンズのシフト量との比が一定値に保たれる条件で当該シフト量を調整することが可能となる。
【0060】
上述の輻輳角調整部を具えることによって、この発明の光学式輻輳角調整3D画像撮像装置によれば、ズーム操作しつつ撮像しても、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見ることができる動画3D画像を撮像することが可能となる。
【図面の簡単な説明】
【0061】
【図1】この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的立体斜視図である。
【図2】この発明の実施形態の光学式輻輳角調整3D画像撮像装置を構成するビデオカメラを撮像レンズの光軸を含む平面で切断して示す概略的断面構成図である。
【図3】(A)は光軸可動レンズの光軸がシフトされていない状態を示す図であり、(B)は光軸可動レンズの光軸がセンター位置からaだけシフトした状態を示す図である。
【図4】(A)は光軸可動レンズがセンター位置にある状態で第1及び第2ビデオカメラのそれぞれの視線方向α及びβが被写体に向けられ輻輳角δが設定されている状態を示す図であり、(B)はズーム操作による焦点距離の変動によって被写体の仮想的位置が移動することによって輻輳角が変更される状態を示す図である。
【図5】レンズアダプターを利用して構成される光学式輻輳角調整3D画像撮像装置の構造の説明に供する図である。
【図6】輻輳角を機械的な手法で調整する方式の3D画像撮像装置におけるズーム動作時の画像の定位についての説明に供する図である。
【図7】輻輳角を光学的な手法で調整する方式の3D画像撮像装置におけるズーム動作時の画像の定位についての説明に供する図である。
【図8】右目用画像を撮像する部分と左目用画像を撮像する部分とが対称の構造で構成されていることを強調して示した、この発明の実施形態の光学式輻輳角調整3D画像撮像方法についての説明に供する図である。
【図9】ソフトウエア処理によって実現される部分を一括して示した、この発明の実施形態の光学式輻輳角調整3D画像撮像方法についての説明に供する図である。
【図10】この発明の実施形態の光学式輻輳角調整3D画像撮像方法のフローチャートである。
【発明を実施するための形態】
【0062】
以下、図を参照して、この発明の実施の形態につき説明する。なお、各図は、この発明が理解できる程度に各構成部分を概略的に示してあるに過ぎず、この発明を図示例に限定するものではない。以下の説明において、特定の機器及び条件等を用いることがあるが、これら機器及び条件は好適例の一つに過ぎず、したがって、何らこれらに限定されない。また、各図において同じ構成要素については同一の番号を付して示し、これらの機能等に関して、その重複する説明を省略することもある。
【0063】
<この発明の実施形態の光学式輻輳角調整3D画像撮像装置>
図1を参照して、この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的構成について説明する。図1は、この発明の実施形態の光学式輻輳角調整3D画像撮像装置の概略的立体斜視図である。以後、光学式輻輳角調整3D画像撮像装置を単に3D画像撮像装置ということもある。
【0064】
図1に示すように、この発明の実施形態の3D画像撮像装置は、右目用画像を撮像する第1ビデオカメラ16と、左目用画像を撮像する第2ビデオカメラ18とを具え、カメラ用三脚48に一体化されて固定されている。この発明の実施形態の3D画像撮像装置は、更に輻輳角調整部を特徴的に具えているが、この輻輳角調整部については、その機能の一部がソフトウエア処理によって実現されるので、後述するこの発明の実施形態の3D画像撮像方法の説明においてその構造及び動作について詳しく説明することとし、図1では図示を省略してある。
【0065】
第1ビデオカメラ16は第1撮像レンズ46Rとビデオカメラ筺体40Rで構成され、第2ビデオカメラ18は第2撮像レンズ46Lとビデオカメラ筺体40Lで構成されている。ここで、輻輳角δを第1ビデオカメラ16の視線と第2ビデオカメラ18の視線とのなす角として示してあり、その大きさがδに設定されている場合を図示してある。この角度δは、後述するように、第1ビデオカメラ16の視線と第2ビデオカメラ18の視線とが平行な状態から同じ角度ωだけ偏角した結果形成されるものとして、ω=δ/2なる関係をもっている。以後の説明において、ωを第1及び第2ビデオカメラの偏角というものとする。
【0066】
カメラオペレーターは、カメラに設けられた図示されていないモニター(出力部)を見ながら、図示されていない操作装置(入力制御部)を操作しながら、第1ビデオカメラ16と第2ビデオカメラ18とを一体化して制御して、第1ビデオカメラ16と第2ビデオカメラ18の双方の視線を被写体70の方向に向ける操作を行う。以後、被写体70のいずれか一箇所を代表して被写体70を指定するものとし、この一箇所を輻輳点ということもある。
【0067】
図2、図3(A)及び図3(B)を参照して、第1ビデオカメラ16及び第2ビデオカメラ18の概略的構成について説明する。第1ビデオカメラ16及び第2ビデオカメラ18は同一構造であるので、ここでは第1及び第2ビデオカメラと区別することなくビデオカメラとして説明する。図2は、この発明の実施形態の3D画像撮像装置を構成するビデオカメラを、撮像レンズの光軸を含む平面で切断して示す概略的断面構成図である。
【0068】
図2に示すように、この発明の実施形態の3D画像撮像装置を構成するビデオカメラは、ビデオカメラ筺体40に撮像レンズ46を具えている。撮像レンズ46は、ズーミング撮像を可能とする焦点距離可変型のカメラレンズ32にアタッチメントレンズ34が結合されて構成されている。アタッチメントレンズ34は、カメラレンズ32の光軸に対して光軸を平行方向にシフトさせることが可能である光軸可動レンズ60を具えている。従って、撮像レンズ46は、アタッチメントレンズ34を具えていることによって、カメラレンズ32の光軸に対して光軸可動レンズ60の光軸が平行な状態でシフトさせることが可能となっており、この光軸可動レンズ60の光軸をシフトさせることによって撮像レンズの視線方向を変化させることが可能となっている。
【0069】
カメラレンズ32とアタッチメントレンズ34は結合部62を介して結合されており、アタッチメントレンズ34とビデオカメラ筺体40とも結合部64を介して結合されている。これら結合部62および64は、この発明の実施形態の3D画像撮像装置を形成するに当たり、従来の2D画像を撮像する2Dビデオカメラの基本構成を変更することなく、単純にアタッチメントレンズ34を装着するだけで、第1及び第2ビデオカメラを構成することを可能とするためのものである。
【0070】
従って、結合部62と結合部64は、相俟ってカメラレンズ32を、アタッチメントレンズ34を介さずに直接ビデオカメラ筺体40に結合させた場合と、アタッチメントレンズ34を介してカメラレンズ32をビデオカメラ筺体40に結合させた場合とにおいて、ビデオカメラ筺体40が具えている結像面66に形成される両画像の間に、収差の相違が生じないようにする働きをしている。
【0071】
カメラレンズ32とアタッチメントレンズ34とが接合されて構成される撮像レンズにあっては、この撮像レンズの焦点距離はカメラレンズ32によって制御される。従って、以下の説明では、カメラレンズ32によって焦点距離を調整するというところを、撮像レンズの焦点距離を調整するということもある。
【0072】
このように、既存の2Dビデオカメラに何らの改造を施さずにアタッチメントレンズ34を装着するだけで、第1及び第2ビデオカメラが構成されれば、従来の2Dビデオカメラのために研究されてきた技術蓄積を最大限有効に利用でき、低コストで高性能な3D画像撮像装置が実現される。
【0073】
カメラレンズ32は、従来周知のズーミング撮像を可能とする焦点距離可変型のカメラレンズであり、ズーム位置信号出力部74を具えている。カメラレンズ32の焦点距離の変更は、カメラレンズ32が焦点距離を変更するための回転機構として具えている回転部分を回転させることによって実現される。また、ビデオカメラ筺体40が具えている結像面66に形成される画像のピントの調整は、カメラレンズ32がピント調整のための回転機構として具えている回転部分を回転させることによって実現される。
【0074】
ズームレンズは、一般に前群レンズと後群レンズの2群構成からなるペッツバール型レンズの間隔を変える構成とされており、前群レンズと後群レンズのそれぞれの位置を変えることによって焦点距離可変機能が実現されている。この前群レンズと後群レンズの移動を連動させる特殊なカムが用いられており、このカムの回転量と焦点距離とは一対一の対応関係にある。ズーム位置信号出力部74は、このカムの回転量を電気信号に変換して読み出す機能を有している。具体的には、周知のポジションセンサーデバイス(PSD: Position Sensitive Detector)等を用いて上述のカムの回転量を読み取る構成を容易に構築することができる。
【0075】
図2に示したビデオカメラが具える撮像レンズは、カメラレンズ32にアタッチメントレンズ34が結合されて構成されている。しかしながら、この発明の実施形態の3D画像撮像装置を構成する撮像レンズは、この構成に限定されるものではない。光軸を平行にシフトさせることが可能な光軸可動レンズ及びズーミング撮像を可能とする焦点距離可変型のカメラレンズの双方の機能が実現されれば、個別に作製されたカメラレンズ32とアタッチメントレンズ34とを結合させて構成する代わりに、はじめから撮像レンズを一体化されて構成されるものとして設計してもよい。
【0076】
図3(A)及び図3(B)を参照して、アタッチメントレンズ34の概略的構成と光軸可動レンズ60による撮像レンズの視線方向を変える原理を説明する。図3(A)及び図3(B)は、アタッチメントレンズ34及びビデオカメラ筺体40が具えている結像面66を含めて、概略的構造をレンズの光軸を含む平面で切断して示す断面構造図である。アタッチメントレンズ34は、光軸可動レンズ60を挟んで前後に単レンズが挿入されているが、これらの単レンズは必ずしも必要なレンズではない。ここでは、この単レンズを、上述した結合部62及び64と共に、ビデオカメラ筺体40が具えている結像面66に形成される画像に違いが生じない状態を実現する働きを分担するレンズとして示してある。
【0077】
図3(A)に示すように、カメラレンズ32の光軸と光軸可動レンズ60の光軸とが合致しており光軸可動レンズ60の光軸がシフトされていない状態、すなわち光軸可動レンズ60がセンター位置にある場合は、光軸可動レンズ60によるカメラレンズの光軸の偏角は生じない。一方、図3(B)に示すように、光軸可動レンズ60の光軸がセンター位置からaだけシフトした状態にある場合は、光軸可動レンズ60の光軸が偏角ωだけ曲げられる。
【0078】
図3(B)では、カメラレンズ32の光軸を実線Mで示し、偏角ωだけ曲げられた光軸を破線Nで示してある。この破線Nで示す直線の方向が後述する第1及び第2ビデオカメラのそれぞれの視線方向となる。偏角ωと光軸可動レンズ60の光軸のシフト量aとは、カメラレンズ32及びアタッチメントレンズ34の構成によって一義的に確定する関係にある。従って、予め偏角ωをシフト量aの関数として確定させておくことが可能となる。
【0079】
偏角ωとシフト量aとが一義的に確定することに関連して、ビデオカメラの結像面66における被輻輳点のシフト量と撮像レンズの焦点距離との関係が、撮像レンズの構造を確定することによって一義的に確定することとなる。従って、後述する被輻輳点のシフト量と撮像レンズの焦点距離との関係を規定するシフト量テーブルを作成することが可能となる。
【0080】
図4(A)及び図4(B)を参照して、第1ビデオカメラ16及び第2ビデオカメラ18の視線方向と被写体70に対する輻輳角δとの関係について説明する。図4(A)及び図4(B)は、第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの焦点距離の変動に対応して被写体70の仮想的位置が移動することに対する輻輳角δの変化の関係についての説明に供する図である。図4(A)及び図4(B)において、被写体70及び被写体70'はそれぞれ、結像面66に結像される被撮像点に共役な撮像点に対応する。
【0081】
図4(A)に示すように、光軸可動レンズがセンター位置にある状態で第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの視線方向α及びβが被写体に向けられ輻輳角δが設定されている状態から、図4(B)に示すように、第1撮像レンズ46R及び第2撮像レンズ46Lをズーム操作することによってそれぞれの焦点距離を変動させると、被写体70は被写体70'と示す仮想的位置に移動する。このようにズーム操作が行われても、結像面66R及び結像面66Lにおける被写体の画像(被撮像点)の位置が変動しないようにするには、図4(B)に示すように、アタッチメントレンズ34R及び34Lによって第1ビデオカメラ16及び第2ビデオカメラ18のそれぞれの視線方向α及びβがα'及びβ'に偏角されるようにする必要がある。
【0082】
言い換えると、結像面66R及び結像面66Lにおける被写体の画像(被撮像点)の位置が変動しないようにするには、アタッチメントレンズ34R及び34Lがそれぞれ具えている光軸可動レンズをシフトさせる必要がある。詳細は後述するが、この条件が満足されるためには、第1撮像レンズ46R及び第2撮像レンズ46Lの焦点距離と被撮像点のシフト量との比が一定値に保たれる条件で、ズーム操作に対応させて光軸可動レンズのシフト量を決定する必要がある。
【0083】
人間が両眼によって認識する3D画像とあまり相違しない3D画像を撮像するためには輻輳角を調整することに加えて、右目用画像と左目用画像をそれぞれ撮像する際の第1撮像レンズと第2撮像レンズとの光軸間距離(基線長と呼ばれることもある。)が人間の両眼の瞳孔間隔に近いほど好ましい。人間の平均的な瞳孔間隔は65mm程度であるから、3D画像撮像装置の基線長も65mm程度に設定された状態で右目用画像及び左目用画像が撮像されれば、人間の目で見た3D画像に近い画像が撮像できる。
【0084】
既存の2Dビデオカメラを2台並列に配置して3D画像撮像装置を構成すると、2Dビデオカメラの筺体の大きさ等の制限から基線長を65mm程度に設定することは困難である。そこで、レンズアダプターを挿入することで、第1撮像レンズと第2撮像レンズとの基線長を65mm程度に設定して3D画像撮像装置を構成することが考えられる。
【0085】
図5を参照して、レンズアダプターを利用して基線長を65mm程度に設定して構成された3D画像撮像装置の構成について説明する。図5は、レンズアダプターを利用して構成される3D画像撮像装置の第1撮像レンズと第2撮像レンズの光軸を含む平面で切断して示す概略的断面構造図である。
【0086】
図5に示すように、第1ビデオカメラ16はカメラレンズ32Rとアタッチメントレンズ34Rとの間にレンズアダプター72Rが挿入されており、第2ビデオカメラ18はカメラレンズ32Lとアタッチメントレンズ34Lとの間にレンズアダプター72Lが挿入されている。
【0087】
レンズアダプター72Rは、カメラレンズ32Rとアタッチメントレンズ34Rとの間に挿入しても、ビデオカメラ筺体40R、カメラレンズ32R、アタッチメントレンズ34Rの構造を変更することなく第1ビデオカメラ16の結像性能に影響を与えない光学的特性を備えていることが望ましい。レンズアダプター72Lについても同様である。このような光学的特性を備えたレンズアダプターとしては、例えば、特許第4447651号公報に開示されているレンズアダプターを適宜利用することが可能である。
【0088】
なお、図5に示す3D画像撮像装置では、第1ビデオカメラ16と第2ビデオカメラ18の双方にレンズアダプターが挿入されているが、第1撮像レンズと第2撮像レンズとの基線長を65mm程度に設定することが可能である場合には、第1ビデオカメラ16あるいは第2ビデオカメラ18のいずれか一方にレンズアダプターを挿入する形態としてもよい。
【0089】
また、カメラレンズ、レンズアダプター、及びアタッチメントレンズを図5に示すように、それぞれ個別に作製されたものを結合させて第1及び第2撮像レンズを構成する代わりに、はじめから第1及び第2撮像レンズのそれぞれを一体化されて構成されるものとして設計してもよい。
【0090】
<光学式輻輳角調整3D画像撮像装置のズーム操作時の画像の定位について>
この発明の実施形態の3D画像撮像装置の構成およびその動作についての説明に先立ち、解決すべき従来の課題を明確にするために、3D画像撮像装置のズーム操作時の画像の定位について、図6及び図7を参照して具体的に説明する。図6及び図7においては、被写体が存在している輻輳点の位置をQで示し、また、撮像レンズ及び撮像レンズの焦点距離、被写体の画像が結像される結像面について、3D画像撮像の定位に関する説明に必要とされる範囲で簡略化して示してある。
【0091】
以後の説明において、第1及び第2ビデオカメラの姿勢を機械的に変化させることによって輻輳角を調整する方式が採用されている3D画像撮像装置を機械式3D画像撮像装置ということもある。一方、光軸可動レンズ等の光学的な手段で調整する方式が採用されている3D画像撮像装置を光学式3D画像撮像装置ということもある。
【0092】
図6及び図7において、撮像レンズを「撮像レンズL」として単レンズで示してあるが、この撮像レンズLは、光軸可動レンズとカメラレンズとが結合されて形成されているものと理解されたい。また、光軸可動レンズの光軸のシフトについては、撮像レンズLの光軸をシフトさせることとして簡略化して示してある。
【0093】
また、図6及び図7では、分かり易さを優先させて、撮像レンズの焦点距離がf1である場合の被撮像点が形成される結像面を結像面S1上とし、撮像レンズの焦点距離がf2である場合の被撮像点が形成される結像面を結像面S2となるように示してある。
【0094】
しかしながら、実際の3D画像撮像装置においては、カメラレンズはズーム撮像を可能とする焦点距離可変型のズームレンズであって、焦点距離が変動しても結像面に形成される被写体の画像はその倍率が変動するのみで、被写体の画像位置は変動しないように形成されている。すなわち、実際のズームレンズにあっては、ズーム操作によって焦点距離が変動することに伴い、この変動分だけズームレンズを構成するレンズ群を光軸に平行方向に移動させる構成とすることによって結像面を固定した状態で被撮像点を結像面に定位するように実現されている。これによって、実際のズームレンズが装着されたビデオカメラにあっては、上述したように実際のズームレンズは焦点距離を変化させても同一結像面に形成されるように設計されている。
【0095】
すなわち、図6及び図7では、分かり易さを優先させて、ズーム操作によって焦点距離が変動することに伴うズームレンズを構成するレンズ群を固定し、その代わりにこの移動量を結像面S1からS2への変動として示してあるものと理解されたい。
【0096】
図6に機械式3D画像撮像装置の概略的構成を示す。第1ビデオカメラ100Rは、撮像レンズLを具え、この撮像レンズLの光軸が結像面(S1およびS2と示してある。)に直交するように設定されている。第2ビデオカメラ100Lも、第1ビデオカメラ100Rと同一の構造である。
【0097】
機械式3D画像撮像装置では、図6に示すように、Qで示した被写体(輻輳点)に対して撮像レンズの光軸とビデオカメラの視線とが一致している。すなわち、輻輳点に対応する撮像レンズの像面上の共役点である被撮像点は常に画面上の中央に存在している。従って、ズーム操作がされて撮像レンズの焦点距離がf1からf2に変化することによって被撮像点がP1からP2に移動しても、この撮像点P1とP2とは常に画面上の中央(撮像レンズの光軸上)に存在している。
【0098】
ここで、偏角ωが第1ビデオカメラの視線と第2ビデオカメラの視線とがなす角である輻輳角δの半分の値、すなわちω=δ/2であるものとする。また、ビデオカメラの視線とは、ビデオカメラから被写体に向う方向を示す直線であり、ここでは撮像レンズの中心から輻輳点に向う直線であると定義する。図6で示すビデオカメラでは、撮像レンズLの光軸と視線とが合致している。
【0099】
機械式3D画像撮像装置にあっては、左右のビデオカメラの姿勢(ビデオカメラの視線方向)が固定された状態でズーム操作がされても、輻輳点に対応する被写体画像の位置が変動することはない。これは、図6に示すように、撮像レンズLの焦点距離が変動しても、輻輳点に対応する撮像レンズの像面上の共役点の位置は常に変動しないからである。
【0100】
一方、光学式3D画像撮像装置にあっては、光軸可動レンズの光軸の位置を固定したままズーム操作を行うと輻輳点に対応する被写体画像の位置が変動するため、3D画像における被写体の位置はスクリーン面上に定位せず、スクリーン面から飛び出したりあるいは引っ込んだりする。
【0101】
すなわち、光学式3D画像撮像装置にあっては、光軸可動レンズの光軸の位置を固定したまま撮像レンズの焦点距離を変化させると、第1ビデオカメラで撮像される右目用画像と第2ビデオカメラで撮像される左目用画像を重ねて合成される3D画像(合成画像)における被写体の位置はスクリーン面上に定位しない。従って、合成画像である3D画像において、被写体の位置をスクリーン面上に定位させるためには、撮像レンズの焦点距離を変化させることに対応させて、一定の条件で光軸可動レンズの光軸をシフトさせる必要がある。
【0102】
この発明の実施形態の3D画像撮像装置は、既に説明したように、光学式輻輳角調整3D画像撮像装置である。ここで、一般的光学式3D画像撮像装置の結像光学系の基本構造について説明する。
【0103】
図7に光学式3D画像撮像装置の結像光学系の概略的構成を示す。第1ビデオカメラ102Rは、撮像レンズL0を具え、この撮像レンズL0の光軸が結像面(S1およびS2と示してある。)に直交するように設定されている。第2ビデオカメラ102Lも、第1ビデオカメラ100Rと同一の構造である。図7では、撮像レンズの位置を区別するために、撮像レンズL0と示す位置からa1だけシフトさせた撮像レンズをL1と示してあり、同じくa2だけシフトさせた撮像レンズをL2と示してある。
【0104】
図7において、撮像レンズL0はビデオカメラの偏角が0である場合を示しており、撮像レンズL1は撮像レンズを構成するズームレンズの焦点距離がf1であり偏角がωに設定されている場合を示しており、撮像レンズL2は撮像レンズを構成するズームレンズの焦点距離がf2であり偏角がωに設定されている場合を示している。
【0105】
図7に示す光学式3D画像撮像装置において、ビデオカメラの視線とは撮像レンズの中心Oから輻輳点Qに向う直線である。光学式3D画像撮像装置にあっては、撮像レンズが光軸可動レンズを具えて構成されており、この光軸可動レンズによって第1及び第2ビデオカメラの姿勢の変更に相当する調整を行っている。そのため、撮像レンズL0の光軸が視線の方向に曲げられており、撮像レンズL0の光軸とビデオカメラの視線とは合致していない。
【0106】
光学式3D画像撮像装置では、図7に示すように、光軸可動レンズの光軸の位置を固定したまま撮像レンズの焦点距離をf1からf2に変化させると、Qで示した被写体(輻輳点)に対応する撮像レンズの像面上の共役点の位置はP1からP2に像面上を移動する。すなわち、撮像レンズの焦点距離がf1であるときの輻輳点の共役点の位置P1は、画面上の中央位置からa1だけ離れた位置に結像し、撮像レンズの焦点距離がf2であるときの輻輳点の共役点の位置P2は、画面上の中央位置からa2だけ離れた位置に結像している。
【0107】
このため、被写体の位置をスクリーン面上に定位させるためには、焦点距離をf1であるときはP1’の位置に結像されるところをP1に結像されるように光軸可動レンズの光軸をa1だけシフトさせ、焦点距離をf2であるときはP2’の位置に結像されるところをP2に結像されるように光軸可動レンズの光軸をa2だけシフトさせて、Qで示した被写体に対応する撮像レンズの像面上の共役点の位置が常に変動しないようにすることが必要となる。
【0108】
右目用画像及び左目用画像中の撮像対象となる被写体の像(輻輳点Qに対応する撮像レンズの像面上の共役点)をスクリーン面上(撮像の場合は結像面上)で重なり合っている場合、その被写体はスクリーン面上に定位して見える。ここで、スクリーン面とは、映画のスクリーン面を指すことは勿論、立体画像が表示機能を持つテレビ画面等も意味する。
【0109】
被写体の位置をスクリーン面上に定位させる、すなわち、右目用画像及び左目用画像中の撮像対象となる被写体の像を合致させて合成画像を形成するとは、偏角ωを常に一定の値に保つ、すなわち、tanω=a1/f1=a2/f2を満足するように撮像レンズの焦点距離と光軸可動レンズの光軸のシフト量を設定すれば良いことが分かる。上述の条件を常に満たすようにズーム操作を行いつつ撮像を行えば、被写体がスクリーン面に定位した状態で拡大あるいは縮小されているように見える動画3D画像を撮像することが可能となる。
【0110】
<この発明の実施形態の光学式輻輳角調整3D画像撮像方法>
図8及び図9を参照して、この発明の実施形態の光学式輻輳角調整3D画像撮像方法について説明する。この説明に当たっては、特にこの発明の実施形態の3D画像撮像装置が特徴的に具えている輻輳角調整部が中心的に重要な役割を果たすので、輻輳角調整部の構造及び動作について詳しく説明する。
【0111】
図8は、この発明の実施形態の3D画像撮像方法についての説明に供する図であって、右目用画像を撮像する部分と左目用画像を撮像する部分とが対称の構造で構成されていることを強調して示してある。なお、それぞれのビデオカメラ自体に設けられているモニター(出力部)と操作装置(入力部)は図示を省略してある。
【0112】
右目用画像を撮像する部分とは、第1ビデオカメラ16、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第1輻輳角調整部10R、第1レンズ位置検出器36R及び第1レンズ駆動回路38Rを具えて構成されている部分を指す。一方、左目用画像を撮像する部分とは、第2ビデオカメラ18、レンズ位置伝達機構42L、レンズ駆動伝達機構44L、第2輻輳角調整部10L、第2レンズ位置検出器36L及び第2レンズ駆動回路38Lを具えて構成されている部分を指す。
【0113】
図9も、この発明の実施形態の3D画像撮像方法についての説明に供する図であるが、コンピューターにおけるソフトウエア処理によって実現される機能手段を一括して示してある。これら機能手段は輻輳角調整部10として、倍率選択手段12、シフト量変換手段14、演算手段22、ズーム倍率変換手段24、ズーム倍率規格化手段26、及び比較手段28を具えており、これらの機能手段のそれぞれとは、右目用画像を撮像する部分が具える第1輻輳角調整部10Rの第1倍率選択手段12R、第1シフト量変換手段14R、第1演算手段22R、第1ズーム倍率変換手段24R、第1ズーム倍率規格化手段26R、及び第1比較手段28Rと、左目用画像を撮像する部分が具える第2輻輳角調整部10Lの第2倍率選択手段12L、第2シフト量変換手段14L、第2演算手段22L、第2ズーム倍率変換手段24L、第2ズーム倍率規格化手段26L、及び第2比較手段28Lとして機能動作する。
【0114】
上述のそれぞれの機能手段の説明は、主に図9を参照して行い、右目用画像を撮像する部分及び左目用画像を撮像する部分でそれぞれ同様に実行されるソフトウエア処理の機能手段の重複する説明を避けることとする。例えば、ズーム倍率変換手段24として説明する内容は、第1ズーム倍率変換手段24R及び第2ズーム倍率変換手段24Lに対する説明であるものと了解されたい。
【0115】
図8に示すように、この発明の実施形態の3D画像撮像装置は、右目用画像を撮像する部分が、第1ビデオカメラ16、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第1レンズ位置検出器36R、第1レンズ駆動回路38R、及び輻輳角調整部10Rを具えて構成されている。一方左目用画像を撮像する部分が、第2ビデオカメラ18、レンズ位置伝達機構42R、レンズ駆動伝達機構44R、第2レンズ位置検出器36L、第2レンズ駆動回路38L、及び輻輳角調整部10Lを具えて構成されている。
【0116】
更に、後述する被写体の選択すなわち輻輳点を特定し、あるいは右目用画像を撮像する部分と左目用画像を撮像する部分の光学的非対称を修正指示する機能を有する画像指示コントローラ50を具えている。
【0117】
画像指示コントローラ50には、詳細は省略するが周知の画像モニター56を具えている。あるいは、画像モニター56は画像指示コントローラ50とは一体化して構成する必要はなく別々に設けてもよい。また、画像モニター56は、右目用画像と左目用画像とを別々に表示する表示装置と、右目用画像中の画像と左目用画像中の被写体の画像を合致させて3D合成画像を表示する表示装置とを具えていることが望ましい。
【0118】
画像指示コントローラ50は、多くの場合ビデオエンジニアによって操作される。そして、画像指示コントローラ50によって、第1ビデオカメラ16及び第2ビデオカメラ18を操作するカメラオペレーターに被写体の特定指示を与え、また輻輳角調整部10R及び10Lに光学的非対称を修正指示する信号を送って右目用画像を撮像する部分と左目用画像を撮像する部分の光学的非対称の修正を行うことが可能である。
【0119】
ビデオエンジニアは、後述するように、画像モニター56を見ながら、右目用画像及び左目用画像中の被写体の画像を合致させて合成画像を形成することによって、輻輳点の設定を指示することができる。
【0120】
まず、図8を参照して、この発明の実施形態の3D画像撮像装置の右目用画像を撮像する部分の構成及びその機能について説明する。
【0121】
第1ビデオカメラ16は、カメラレンズ32Rとアタッチメントレンズ34Rとを結合させて構成された第1撮像レンズ46Rがビデオカメラ筺体40Rに装着されて構成されている。第1撮像レンズ46Rは、ズーム位置を与えるパラメータzを出力するズーム位置信号出力部(図示を省略してある。)と、光軸可動レンズのレンズ位置を検出する第1レンズ位置検出器36Rと、光軸可動レンズのレンズ位置を変更させる第1レンズ駆動回路38Rとが装着されて具えられている。
【0122】
ズーム位置信号出力部は、ズーム位置、すなわち焦点距離を電気信号に変換して出力する機能を有しており、上述したようにPSDを用いて構成されている。具体的には、カメラレンズ32Rを構成しているレンズあるいはレンズ群の光軸上での位置の移動に基づいて決定する焦点距離と、これらのレンズあるいはレンズ群を移動させるためのカムの回転量との関係を予めカメラレンズ32Rの仕様書等から把握しておき、ズーム位置信号出力部を構成するPSDから出力される電気信号であるズーム位置を与えるパラメータzの値と、カメラレンズ32R焦点距離f(z)との関係をテーブル形式で焦点距離テーブルとして確定しておく。これら確定された焦点距離テーブル等は、後述するように記憶装置に書き込まれる。
【0123】
アタッチメントレンズ34Rに含まれる光軸可動レンズ(図2及び図3に示した光軸可動レンズ60に相当する。)は、レンズ位置伝達機構42Rを介して第1レンズ位置検出器36Rに結合されており、また、レンズ駆動伝達機構44Rを介して第1レンズ駆動回路38Rに結合されて構成されている。
【0124】
アタッチメントレンズ34Rに含まれる光軸可動レンズの位置は、レンズ位置伝達機構42Rによって認識されて第1レンズ位置検出器36Rに伝達される。また、第1レンズ駆動回路38Rからシフト量が第1レンズ位置伝達機構42Rに伝達されこの第1レンズ位置伝達機構42Rによってこの光軸可動レンズの位置が変化させられる。
【0125】
第1レンズ位置伝達機構42Rは周知のステップモーター等を利用して実現可能であり、第1レンズ駆動回路38Rはこのステップモーターを駆動するためのパルス信号を生成してステップモーターを駆動する構成とする。第2レンズ駆動回路38Lび第2レンズ位置伝達機構42Lについても同様である。
【0126】
第1輻輳角調整部10Rは、第1倍率選択手段12Rと、第1シフト量変換手段14Rと、第1ズーム倍率変換手段24Rと、第1ズーム倍率規格化手段26Rと、第1演算手段22Rと、第1比較手段28Rとを具えて構成されている。
【0127】
第1倍率選択手段12Rは、第1撮像レンズ46Rのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定する。第1倍率選択手段12Rは、例えばソフトウエアによって実現することが可能であり、後述するように第1及び第2輻輳角制御装置として利用するパーソナルコンピュータ(PC)にソフトウエアとして組み込んで、このPCの入力部、例えばキーボードから入力する構成とすることができる。この基準ズーム比mの設定は、例えばビデオエンジニアによって、第1撮像レンズ46Rが具えているカメラレンズ32Rの基準ズーム比mをPCのキーボードから入力することによって設定される。
【0128】
基準ズーム比mは、第1撮像レンズ46Rが具えるカメラレンズ32Rのカタログ値を採用する必要は必ずしもなく、各撮像に応じて、カタログ値の範囲内でカメラレンズ32Rのテレ端における焦点距離ftとワイド端における焦点距離fwとを任意に設定し、この設定された焦点距離ftと焦点距離fwとの比を基準ズーム比mとして設定しても良い。この場合、以後の操作において、テレ端及びワイド端に対応するそれぞれの焦点距離は、任意に設定した焦点距離を一貫して用いる必要がある。
【0129】
第1シフト量変換手段14Rは、輻輳点に対応する第1撮像レンズ46Rのテレ端におけるシフト量atを出力する。撮像開始に当たり最初に輻輳点を設定した時点でのカメラレンズ32Rの焦点距離とこのシフト量atとの関係は、シフト量テーブルの形式で初期条件として確定しておく。
【0130】
第1ズーム倍率変換手段24Rは、第1撮像レンズ46Rが具えているカメラレンズ32Rの焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力する。上述したように、PSDを備えて構成されているカメラレンズ32Rのズーム位置信号出力部から出力されるズーム位置を与えるパラメータzの値と、カメラレンズ32Rの距離との関係は予めテーブル形式で焦点距離テーブルとして確定されているので、この焦点距離テーブルに基づきズーム比m(z)が確定される。すなわち、ワイド端におけるパラメータzの値をzwとした場合、m(z)=f(z)/fw=f(z)/f(zw)と求まる。
【0131】
第1ズーム倍率規格化手段26Rは、第1ズーム倍率変換手段24Rから出力されるズーム比m(z)と、第1倍率選択手段12Rから出力される基準ズーム比mとの比m(z)/mを算出して出力する。比m(z)/mは、焦点距離テーブルを参照してm(z)/m={f(z)/fw)}/(ft/fw)=f(z)/ftと求まる。ftは、テレ端におけるパラメータzの値をztとした場合f(zt)である。ここで、f(z)、f(zt)及びf(zw)は、上述の焦点距離テーブルから読み出すことが可能である。実際の輻輳角調整ステップを実現する際には、上述したように基準ズーム比mが予め設定されて確定されているので、第1ズーム倍率規格化手段26Rでは、m(z)=f(z)/f(zw)で与えられるズーム比の変換を行うだけでよい。すなわち、ここでは、テレ端での焦点距離ft及びワイド端での焦点距離fwの値そのものを使わなくとも、m(z)=f(z)/f(zw)で与えられるズーム比の変換を行うだけで済む。
【0132】
第1演算手段22Rは、第1ズーム倍率規格化手段26Rから出力される比m(z)/mと、第1シフト量変換手段14Rから出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量a(z)=at×m(z)/mを算出して出力する。シフト量atは、上述したように、シフト量テーブルの形式でカメラレンズ32Rの焦点距離f(z)の形式のシフト量テーブルで確定されているので、このシフト量テーブルからパラメータzに対応させて確定することが可能である。
【0133】
第1レンズ位置検出器36Rは、光軸可動レンズのシフト量a'(z)を検出する。第1レンズ位置検出器36RもPSDを用いて周知の方法で形成することが可能である。第1レンズ位置伝達機構42Rは、第1レンズ位置検出器36Rから出力される電気信号に従ってシフト量a'(z)を電気信号の形式で出力される電子回路を形成すれば実現する。第2レンズ位置検出器36L及び第2レンズ位置伝達機構42Lについても同様である。
【0134】
第1比較手段28Rは、第1レンズ位置検出器36Rから出力されるシフト量a'(z)と、第1演算手段22Rから出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように光軸可動レンズをシフトさせる指示信号を出力する。
【0135】
第1レンズ駆動回路38Rは、第1比較手段28Rから出力された指示信号a(z)-a'(z)に基づいて光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する。
【0136】
第2撮像カメラ46L、第2レンズ位置伝達機構42L、第2レンズ駆動伝達機構44L、第2輻輳角調整部10L、第2レンズ位置検出器36L及び第2レンズ駆動回路38Lを具えて構成されている左目用画像を撮像する部分については、上述の右目用画像を撮像する部分と同一であるので、その構造及び動作についての説明は省略する。また、第2輻輳角調整部10Lの構成要素である第2倍率選択手段12L、第2シフト量変換手段14L、第2ズーム倍率変換手段24L、第2ズーム倍率規格化手段26L、第2演算手段22L、及び第2比較手段28Lのそれぞれの機能についても、第1輻輳角調整部10Rが具えている対応する機能と同一であるので、その構造及び動作についての説明は省略する。
【0137】
<この発明の実施形態の光学式輻輳角調整3D画像撮像方法の具体例>
以下、図9及び図10を参照して、この発明の実施形態の3D画像撮像方法の一例を具体的に説明する。図9はソフトウエア処理によって実現される機能手段を一括して示した、この発明の実施形態の3D画像撮像方法についての説明に供する図であり、図10はこの発明の実施形態の3D画像撮像方法のフローチャートである。
【0138】
まず、図9を参照して、この発明の実施形態の3D画像撮像装置のソフトウエア処理によって実現される機能手段に着目して輻輳角調整部10の構成及びその機能ついて説明する。
【0139】
輻輳角調整部10は、輻輳点に対応して定まる光軸可動レンズのシフト量とカメラレンズの焦点距離との比が一定値に保たれる条件で、第1及び第2撮像レンズの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて光軸可動レンズの光軸のシフト量を調整する機能を有し、以下のとおり構成されている。
【0140】
輻輳角調整部10は、MPU(Micro Processing Unit)78、入力部58及び出力部68を具えて構成される周知のPC等を用いることができる。入力部58はPCに通常用いられるキーボード等の任意好適な公知の入力装置を具え、及び、出力部68はディスプレイ等の任意好適な出力装置を具えて構成される。MPU 78は、周知の構成とすることができ、ここでは、CPU(Central Processing Unit)76と、メモリとしてのROM(Read Only Memory)52及びRAM(Random Access Memory)54を具える構成としている。
【0141】
ここでは、輻輳角調整部10はこの発明の実施形態の3D画像撮像装置を構成する第1及び第2ビデオカメラと一体化されて構成されており、撮像指示コントローラ50が輻輳角調整部10から離れた場所に通信形態RS422Aによって接続されて配置されているものとする。また、輻輳角調整部10を含め第1及び第2ビデオカメラと一体化されて構成された3Dビデオカメラ本体部をカメラオペレーターが操作し、撮像指示コントローラ50をビデオエンジニアが操作しているものと仮定する。
【0142】
CPU 76が具える制御手段30は、例えばROM 52に読み出し自在に記録されているプログラムを読み出して当該プログラムを実行することにより、CPU 76の機能手段として、倍率選択手段12、シフト量変換手段14、ズーム倍率変換手段24、ズーム倍率規格化手段26、演算手段22、及び比較手段28を実現する。
【0143】
つづいて、図9を参照しつつ図10のフローチャートに従って、この発明の実施の形態の3D画像撮像方法の具体的例について説明する。
【0144】
3D画像撮像の撮像の開始に当たり、輻輳角調整部10を含め第1及び第2ビデオカメラと一体化されて構成された3Dビデオカメラ、及び撮像指示コントローラ50の電源をON状態にして撮像開始状態を設定する。このとき、制御手段30に、ROM 52に読み出し自在に記録されているプログラムが読み出され、CPU 76では倍率選択手段12、シフト量変換手段14、ズーム倍率変換手段24、ズーム倍率規格化手段26、演算手段22、及び比較手段28が実現可能な状態に設定される。
【0145】
次に、カメラオペレーターによって、第1及び第2ビデオカメラを被写体に向けて動作させ、入力部58を介して倍率選択手段12に第1及び第2撮像レンズの双方のカメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftの値を入力し、倍率選択手段12においてこれらft及びfwからその比m(=ft/fw)を設定するステップS1が実行される。ステップS1において、これらft及びfwと、この比mの値はRAM 54に記憶される。
【0146】
ROM 52あるいはRAM 54には、カメラレンズ32を構成しているレンズあるいはレンズ群の光軸上での位置の移動に基づいて決定する焦点距離と、これらのレンズあるいはレンズ群を移動させるためのカムの回転量との関係を予めカメラレンズ32の仕様書等で与えられているデータに基づき、ズーム位置信号出力部を構成するPSDから出力される電気信号であるズーム位置を与えるパラメータzの値とカメラレンズ32の焦点距離f(z)との関係を与える焦点距離テーブルが記憶されている。カメラレンズ32を頻繁に交換して利用することなく撮像作業において恒常的に同一のものを使用するのであれば、この焦点距離テーブルはROM 52に記憶させておくのが好適である。
【0147】
カメラオペレーターは、第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップS2を実行する。
【0148】
ビデオエンジニアは、撮像指示コントローラ50を、画像モニター56を見ながら操作して右目用画像及び左目用画像中の被写体の像を合致させて合成画像を形成する輻輳点を設定するステップS3を実行する。このステップS3において、第1及び第2撮像レンズの視線方向が輻輳点に対して対称な方向に向くように撮像指示コントローラ50からシフト量変換手段14に指示が与えられる。
【0149】
この指示は、出力部68に表示される構成としておくのが便利である。また、このとき第1及び第2撮像レンズの視線方向が輻輳点に対して非対称な方向に向いている場合は、輻輳角調整部10に光学的非対称を修正指示する信号を撮像指示コントローラ56から送って光学的非対称を修正する。
【0150】
輻輳点を撮像指示コントローラ56から指示すると撮像レンズが具えている光軸可動レンズの位置が確定され、すなわちこの光軸可動レンズの光軸のシフト量が確定される。第1及び第2撮像レンズの構造上の非対称性が無ければ、第1及び第2撮像レンズが具える光軸可動レンズのシフト量を等しく設定すれば良いこととなるが、厳密に機械的な同一性を確保することは一般に難しい。そこで、輻輳角調整部10に撮像指示コントローラ56から微調整信号を送り、第1及び第2撮像レンズの光学的非対称を修正する。
【0151】
ステップS3が終了したら、第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの光軸可動レンズのシフト量atを第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zと共に確定させるステップS4が実行される。
【0152】
第1及び第2撮像レンズをそれぞれテレ端に設定した状態で、第1及び第2撮像レンズのそれぞれのズーム位置信号出力部74から出力されるパラメータの値zと、第1及び第2撮像レンズのそれぞれのレンズ位置検出器36から出力される光軸可動レンズのシフト量atの値とが輻輳角調整部10のCPU76によって読み取られて、パラメータの値zとシフト量atの値とが確定される。
【0153】
このステップS4が実行されることによって、撮像開始の最初の段階で輻輳点を設定した時点でのカメラレンズ32Rの焦点距離とこのシフト量atとの関係がシフト量テーブルの形式で作成されてRAM 54に記憶される。
【0154】
ステップS4が実行されたらそのまま撮像を続けてもよいが、ズーム操作を行う必要に応じて次のステップS5に進む。
【0155】
カメラペレーターは、ビデオエンジニアの指示等必要に応じてズーム操作を行うがこの操作がステップS5である。すなわち、ステップS5は、第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップである。
【0156】
ステップS5に続いてステップS5によって変化された第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値f(z)を読み込むステップS6が行われる。ステップS6は、第1及び第2撮像レンズがそれぞれ具えているズーム位置信号出力部から現在のズーム位置を与えるパラメータzが出力され、このパラメータzがズーム倍率変換手段24に読み込まれるステップである。
【0157】
ズーム倍率変換手段24がROM 52に記憶されている焦点距離テーブルを読み出すことによって、パラメータzの値と、カメラレンズ32の焦点距離f(z)との関係が把握される状態となる。
【0158】
ズーム倍率変換手段24によって、ステップS6に続いてカメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成するステップS7が実行される。このm(z)テーブルはRAM 54に記憶される。
【0159】
ズーム倍率規格化手段26によって、ステップS1で書き込まれたmの値及び上述のm(z)テーブルがRAM 54から読み出され、m(z)とmとの比m(z)/mを算出してRAM 54に記憶するステップS8が実行される。
【0160】
演算手段22によって、RAM 54からステップS4で確定されたatの値、焦点距離テーブルが読み出され、ズーム位置信号出力部から出力されるパラメータがzであるときのカメラレンズのシフト量a(z)をa(z)=at×m(z)/mとして算出してRAM 54に記憶するステップS9が実行される。
【0161】
倍率選択手段12によって、レンズ位置検出器36から出力される光軸可動レンズのシフト量a'(z)を読み込んでRAM 54に記憶するステップS10が実行される。
【0162】
比較手段28によって、ステップS9で算出されたシフト量a(z)をRAM 54から読み出すと共に、ステップS10で読み込まれたシフト量a'(z)とをRAM 54から読み出して、両シフト量が等しくなるように、光軸可動レンズの光軸の位置を調整するステップS11が実行される。この比較手段28では、a'(z)をa(z)に近づけるけるための周知のアルゴリズムを使って実行することが可能である。
【0163】
例えば、シフト量差|a(z)-a'(z)|を比較手段28からレンズ駆動回路に供給して動作させ、これにより光軸可動レンズを移動させる。この光軸可動レンズの位置をレンズ位置検出器によって検出して新たなa'(z)を求め、この値を比較手段28に送る。これをシフト量差|a(z)-a'(z)|が0となるまでフィードバックさせて処理する。
【0164】
以上ステップS11が終了した時点で、設定された焦点距離に対して光軸可動レンズの位置が被写体の画像がスクリーン面上に定位された状態が実現するように設定されている。従って、この状態でしばらく撮像を続けることが可能である。すなわち、ステップS11でa(z)=a'(z)と調整された状態で、第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップS12を実行することができる。
【0165】
撮像を続行中、すなわちステップS12を実行中に、ビデオエンジニアあるいはカメラペレーターの意思によって、再度第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップS13が実行される。
【0166】
また、撮像対象となる被写体を変更して、右目用画像及び左目用画像における変更した被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップS14、撮像操作を終了させるか否かを判断するステップS15、及び撮像作業を終了させるステップS16が用意されている。これらのステップにおける判断は、例えば、ビデオエンジニアによって行われる。
【0167】
ステップS13において再度のズーム操作を行うと判断されたときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、ステップS14において撮像対象となる被写体を変更すると判断されたときはステップS3に進み、撮像対象となる被写体を変更しないと判断されたときはステップS15に進み、ステップS15において撮像操作を終了させないと判断された場合はステップS12に進む。そして、ステップS15において撮像操作を終了させると判断された場合はステップS16に進むことによってこの発明の3D画像撮像方法は完了する。
【符号の説明】
【0168】
10:輻輳角調整部
10R:第1輻輳角調整部
10L:第2輻輳角調整部
12:倍率選択手段
12R:第1倍率選択手段
12L:第2倍率選択手段
14:シフト量変換手段
14R:第1シフト量変換手段
14L:第2シフト量変換手段
16、100R、102R:第1ビデオカメラ
18、100L、102L:第2ビデオカメラ
22:演算手段
22R:第1演算手段
22L:第2演算手段
24:ズーム倍率変換手段
24R:第1ズーム倍率変換手段
24L:第2ズーム倍率変換手段
26:ズーム倍率規格化手段
26R:第1ズーム倍率規格化手段
26L:第2ズーム倍率規格化手段
28:比較手段
28R:第1比較手段
28L:第2比較手段
30:制御手段
32、32R、32L:カメラレンズ
34、34R、34L:アタッチメントレンズ
36:レンズ位置検出器
36R:第1レンズ位置検出器
36L:第2レンズ位置検出器
38R:第1レンズ駆動回路
38L:第2レンズ駆動回路
40、40R、40L:ビデオカメラ筺体
42R、42L:レンズ位置伝達機構
44R、44L:レンズ駆動伝達機構
46:撮像レンズ
46R:第1撮像レンズ
46L:第2撮像レンズ
48:カメラ用三脚
50:画像指示コントローラ
52:ROM
54:RAM
56:画像モニター
58:入力部
60:光軸可動レンズ
62、64:結合部
66、66R、66L:結像面
68:出力部
70、70':被写体
72R、72L:レンズアダプター
74:ズーム位置信号出力部
76:CPU
78:MPU
【特許請求の範囲】
【請求項1】
右目用画像を撮像する第1ビデオカメラと、左目用画像を撮像する第2ビデオカメラと、輻輳角調整部とを具え、
前記第1ビデオカメラは第1撮像レンズを具え、第2ビデオカメラは第2撮像レンズを具えており、該第1及び第2撮像レンズのそれぞれは、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとを、該カメラレンズの光軸に対して前記光軸可動レンズの光軸が平行な状態でシフトさせることが可能な状態に結合されて構成されており、
前記輻輳角調整部は、被写体に向けられた前記第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、前記光軸可動レンズのシフト量と前記カメラレンズの焦点距離との比が一定値に保たれる条件で、前記第1および第2撮像レンズがそれぞれ具えている前記カメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、前記第1および第2撮像レンズが具えている双方の前記光軸可動レンズの光軸のシフト量を調整する
ことを特徴とする光学式輻輳角調整立体画像撮像装置。
【請求項2】
前記輻輳角調整部は、
前記カメラレンズの焦点距離を規定するズーム位置を与えるパラメータをzとし、
前記カメラレンズのワイド端での焦点距離をfw、テレ端での焦点距離をftとし、
前記カメラレンズのワイド端での前記シフト量をaw、テレ端での前記シフト量をatとして、
ズーム操作に伴う前記カメラレンズの焦点距離及び前記光軸可動レンズのシフト量をzの関数として表して、それぞれf(z)及びa(z)とした場合、
ズーム操作のそれぞれの時点における前記シフト量a(z)と、前記焦点距離f(z)との比a(z)/f(z)が、a(z)/f(z)=aw/fw=at/ft(=一定値)で与えられる条件で、前記シフト量a(z)を調整する
ことを特徴とする請求項1に記載の光学式輻輳角調整立体画像撮像装置。
【請求項3】
前記第1及び第2撮像レンズのそれぞれは、前記パラメータzを出力するズーム位置信号出力部と、レンズ位置検出器と、レンズ駆動回路とを具え、
前記輻輳角調整部は、倍率選択手段と、シフト量変換手段と、ズーム倍率変換手段と、ズーム倍率規格化手段と、演算手段と、比較手段とを具え、
前記倍率選択手段は、前記カメラレンズのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定し、
前記シフト量変換手段は、前記輻輳点に対応する前記カメラレンズのテレ端における前記シフト量atを出力し、
前記ズーム倍率変換手段は、焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力し、
前記ズーム倍率規格化手段は、前記ズーム倍率変換手段から出力されるズーム比m(z)と、前記倍率選択手段から出力される基準ズーム比mとの比m(z)/mを算出して出力し、
前記演算手段は、前記ズーム倍率規格化手段から出力される前記比m(z)/mと、前記シフト量変換手段から出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量at×m(z)/mで与えられるa(z)を算出して出力し、
前記レンズ位置検出器は、前記光軸可動レンズのシフト量a'(z)を検出し、
前記比較手段は、前記レンズ位置検出器から出力されるシフト量a'(z)と、前記演算手段から出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように前記光軸可動レンズをシフトさせる指示信号を出力し、
前記レンズ駆動回路は、前記比較手段から出力された前記指示信号に基づいて前記光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する
ことを特徴とする請求項2に記載の光学式輻輳角調整立体画像撮像装置。
【請求項4】
光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、該第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロックさせてそれぞれ撮像することによって立体画像を撮像する光学式輻輳角調整立体画像撮像方法であって、
前記右目用画像及び前記左目用画像中の被写体の像を合致させて合成画像を形成する合成画像形成ステップと、
前記被写体に向けられた前記第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、前記光軸可動レンズのシフト量と前記カメラレンズの焦点距離との比が一定値に保たれる条件で、前記第1及び第2撮像レンズがそれぞれ具えているカメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、前記第1および第2撮像レンズが具えている双方の前記光軸可動レンズの光軸のシフト量を調整する輻輳角調整ステップと
を含むことを特徴とする光学式輻輳角調整立体画像撮像方法。
【請求項5】
光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、該第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロックさせてそれぞれ撮像することによって立体画像を撮像する光学式輻輳角調整立体画像撮像方法であって、
前記第1及び第2撮像レンズの双方の前記カメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftとの比m(=ft/fw)を設定し、該比mを記憶装置に書き込むステップS1と、
前記第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップS2と、
前記右目用画像及び前記左目用画像中の被写体の像を合致させて合成画像を形成するステップS3と、
前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの前記光軸可動レンズの前記シフト量atを、前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zと共に確定させるステップS4と、
前記第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップS5と、
ステップS5によって変化された前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zを読み込むステップS6と、
前記カメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成して記憶装置に記憶するステップS7と、
前記比mと前記m(z)テーブルとを前記記憶装置から読み出して、前記m(z)と前記mとの比m(z)/mを算出するステップS8と、
前記パラメータの値がzであるときの前記カメラレンズの前記シフト量a(z)をa(z)=at×m(z)/mとして算出するステップS9と、
前記光軸可動レンズのシフト量a'(z)を読み込むステップS10と、
ステップS9で算出されたシフト量a(z)とステップS10で読み込まれたシフト量a'(z)とが等しくなるように、前記光軸可動レンズの光軸の位置を調整するステップS11と、
ステップS11でa(z)=a'(z)と調整された状態で、前記第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップS12と、
再度前記第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップS13と、
撮像対象となる被写体を変更して、前記右目用画像及び前記左目用画像における変更した該被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップS14と、
撮像操作を終了させるか否かを判断するステップS15と、
撮像作業を終了させるステップS16と
を含み、
ステップS13において、再度のズーム操作を行うと判断したときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、
ステップS14において、撮像対象となる被写体を変更すると判断したときはステップS3に進み、撮像対象となる被写体を変更しないと判断したときはステップS15に進み、
ステップS15において、撮像操作を終了させないと判断した場合はステップS12に進み、撮像操作を終了させると判断した場合はステップS16に進む
ことを特徴とする光学式輻輳角調整立体画像撮像方法。
【請求項1】
右目用画像を撮像する第1ビデオカメラと、左目用画像を撮像する第2ビデオカメラと、輻輳角調整部とを具え、
前記第1ビデオカメラは第1撮像レンズを具え、第2ビデオカメラは第2撮像レンズを具えており、該第1及び第2撮像レンズのそれぞれは、光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとを、該カメラレンズの光軸に対して前記光軸可動レンズの光軸が平行な状態でシフトさせることが可能な状態に結合されて構成されており、
前記輻輳角調整部は、被写体に向けられた前記第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、前記光軸可動レンズのシフト量と前記カメラレンズの焦点距離との比が一定値に保たれる条件で、前記第1および第2撮像レンズがそれぞれ具えている前記カメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、前記第1および第2撮像レンズが具えている双方の前記光軸可動レンズの光軸のシフト量を調整する
ことを特徴とする光学式輻輳角調整立体画像撮像装置。
【請求項2】
前記輻輳角調整部は、
前記カメラレンズの焦点距離を規定するズーム位置を与えるパラメータをzとし、
前記カメラレンズのワイド端での焦点距離をfw、テレ端での焦点距離をftとし、
前記カメラレンズのワイド端での前記シフト量をaw、テレ端での前記シフト量をatとして、
ズーム操作に伴う前記カメラレンズの焦点距離及び前記光軸可動レンズのシフト量をzの関数として表して、それぞれf(z)及びa(z)とした場合、
ズーム操作のそれぞれの時点における前記シフト量a(z)と、前記焦点距離f(z)との比a(z)/f(z)が、a(z)/f(z)=aw/fw=at/ft(=一定値)で与えられる条件で、前記シフト量a(z)を調整する
ことを特徴とする請求項1に記載の光学式輻輳角調整立体画像撮像装置。
【請求項3】
前記第1及び第2撮像レンズのそれぞれは、前記パラメータzを出力するズーム位置信号出力部と、レンズ位置検出器と、レンズ駆動回路とを具え、
前記輻輳角調整部は、倍率選択手段と、シフト量変換手段と、ズーム倍率変換手段と、ズーム倍率規格化手段と、演算手段と、比較手段とを具え、
前記倍率選択手段は、前記カメラレンズのテレ端における焦点距離ftとワイド端における焦点距離fwとの基準ズーム比m(=ft/fw)を設定し、
前記シフト量変換手段は、前記輻輳点に対応する前記カメラレンズのテレ端における前記シフト量atを出力し、
前記ズーム倍率変換手段は、焦点距離がf(z)であるときの倍率であるズーム比m(z)(=f(z)/fw)を計算して出力し、
前記ズーム倍率規格化手段は、前記ズーム倍率変換手段から出力されるズーム比m(z)と、前記倍率選択手段から出力される基準ズーム比mとの比m(z)/mを算出して出力し、
前記演算手段は、前記ズーム倍率規格化手段から出力される前記比m(z)/mと、前記シフト量変換手段から出力されるシフト量atとが入力されて、焦点距離がf(z)であるときのシフト量at×m(z)/mで与えられるa(z)を算出して出力し、
前記レンズ位置検出器は、前記光軸可動レンズのシフト量a'(z)を検出し、
前記比較手段は、前記レンズ位置検出器から出力されるシフト量a'(z)と、前記演算手段から出力されるシフト量a(z)とが入力されて、a(z)-a'(z)=0となるように前記光軸可動レンズをシフトさせる指示信号を出力し、
前記レンズ駆動回路は、前記比較手段から出力された前記指示信号に基づいて前記光軸可動レンズの光軸がシフトされるように当該光軸可動レンズの位置を調整する
ことを特徴とする請求項2に記載の光学式輻輳角調整立体画像撮像装置。
【請求項4】
光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、該第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロックさせてそれぞれ撮像することによって立体画像を撮像する光学式輻輳角調整立体画像撮像方法であって、
前記右目用画像及び前記左目用画像中の被写体の像を合致させて合成画像を形成する合成画像形成ステップと、
前記被写体に向けられた前記第1及び第2ビデオカメラのそれぞれの視線の交点として定義される輻輳点に対応して定まる、前記光軸可動レンズのシフト量と前記カメラレンズの焦点距離との比が一定値に保たれる条件で、前記第1及び第2撮像レンズがそれぞれ具えているカメラレンズの互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させることに対応させて、前記第1および第2撮像レンズが具えている双方の前記光軸可動レンズの光軸のシフト量を調整する輻輳角調整ステップと
を含むことを特徴とする光学式輻輳角調整立体画像撮像方法。
【請求項5】
光軸を平行にシフトさせることが可能な光軸可動レンズと、ズーミング撮像を可能とする焦点距離可変型のカメラレンズとが結合されて構成された第1撮像レンズを具えた第1ビデオカメラによって右目用画像を、該第1撮像レンズと同一の構造の第2撮像レンズを具えた第2ビデオカメラによって左目用画像を、ゲンロックさせてそれぞれ撮像することによって立体画像を撮像する光学式輻輳角調整立体画像撮像方法であって、
前記第1及び第2撮像レンズの双方の前記カメラレンズのワイド端での焦点距離fwとテレ端での焦点距離ftとの比m(=ft/fw)を設定し、該比mを記憶装置に書き込むステップS1と、
前記第1及び第2ビデオカメラをゲンロックさせて、右目用画像及び左目用画像の撮像を開始するステップS2と、
前記右目用画像及び前記左目用画像中の被写体の像を合致させて合成画像を形成するステップS3と、
前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離がテレ端に設定されているときの前記光軸可動レンズの前記シフト量atを、前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zと共に確定させるステップS4と、
前記第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うステップS5と、
ステップS5によって変化された前記第1及び第2撮像レンズのそれぞれが具えるカメラレンズの焦点距離を規定するズーム位置を与えるパラメータの値zを読み込むステップS6と、
前記カメラレンズのズーム位置を与えるパラメータの値がzであるときの焦点距離f(z)とワイド端での焦点距離fwとの比m(z)(=f(z)/fw)をzの関数として規定するm(z)テーブルを作成して記憶装置に記憶するステップS7と、
前記比mと前記m(z)テーブルとを前記記憶装置から読み出して、前記m(z)と前記mとの比m(z)/mを算出するステップS8と、
前記パラメータの値がzであるときの前記カメラレンズの前記シフト量a(z)をa(z)=at×m(z)/mとして算出するステップS9と、
前記光軸可動レンズのシフト量a'(z)を読み込むステップS10と、
ステップS9で算出されたシフト量a(z)とステップS10で読み込まれたシフト量a'(z)とが等しくなるように、前記光軸可動レンズの光軸の位置を調整するステップS11と、
ステップS11でa(z)=a'(z)と調整された状態で、前記第1及び第2ビデオカメラによってそれぞれ右目用画像及び左目用画像の撮像を継続するステップS12と、
再度前記第1及び第2ビデオカメラを互いの焦点距離が等しい状態で同時に互いの焦点距離を変化させるズーム操作を行うか否かを判断するステップS13と、
撮像対象となる被写体を変更して、前記右目用画像及び前記左目用画像における変更した該被写体の像を合致させる輻輳点の変更を行うか否かを判断するステップS14と、
撮像操作を終了させるか否かを判断するステップS15と、
撮像作業を終了させるステップS16と
を含み、
ステップS13において、再度のズーム操作を行うと判断したときはステップS5に進み、再度のズーム操作を行わないと判断したときはステップS14に進み、
ステップS14において、撮像対象となる被写体を変更すると判断したときはステップS3に進み、撮像対象となる被写体を変更しないと判断したときはステップS15に進み、
ステップS15において、撮像操作を終了させないと判断した場合はステップS12に進み、撮像操作を終了させると判断した場合はステップS16に進む
ことを特徴とする光学式輻輳角調整立体画像撮像方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−2974(P2012−2974A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−136876(P2010−136876)
【出願日】平成22年6月16日(2010.6.16)
【特許番号】特許第4654318号(P4654318)
【特許公報発行日】平成23年3月16日(2011.3.16)
【出願人】(505433471)武蔵オプティカルシステム株式会社 (4)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月16日(2010.6.16)
【特許番号】特許第4654318号(P4654318)
【特許公報発行日】平成23年3月16日(2011.3.16)
【出願人】(505433471)武蔵オプティカルシステム株式会社 (4)
【出願人】(594044646)株式会社エヌエイチケイメディアテクノロジー (20)
【Fターム(参考)】
[ Back to top ]