
光学接続部品製造装置および光学接続部品製造方法
【課題】品質を高めた光学接続部品が製造できる光学接続部品製造装置および光学接続部品製造方法を提供する。
【解決手段】光学接続部品製造装置10は、揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液20を保持する保持手段50と、保持手段50に屈折率整合液20を供給するディスペンサ16と、保持手段50に供給された屈折率整合液20を、光ファイバfの先端面f1に吸着させるために光ファイバfを帯電させる静電気発生装置13とを備え、静電気発生装置13は、ディスペンサ16が保持手段50に屈折率整合液20を供給してから、屈折率整合液20の溶媒が揮発することで屈折率整合液20における屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、光ファイバfを帯電させるものである。
【解決手段】光学接続部品製造装置10は、揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液20を保持する保持手段50と、保持手段50に屈折率整合液20を供給するディスペンサ16と、保持手段50に供給された屈折率整合液20を、光ファイバfの先端面f1に吸着させるために光ファイバfを帯電させる静電気発生装置13とを備え、静電気発生装置13は、ディスペンサ16が保持手段50に屈折率整合液20を供給してから、屈折率整合液20の溶媒が揮発することで屈折率整合液20における屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、光ファイバfを帯電させるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置および線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法に関する。
【背景技術】
【0002】
従来、光学部材どうしを接続する光学接続部品として、線状の光学部材の先端面に屈折率整合体を付着させたものが知られている。この光学接続部品は、光学部材の、屈折率整合体が付着した先端面に、他の光学部材の端面を押し付けることで光学接続部品と他の光学部材を接続するものである。その光学接続部品を製造する光学接続部品製造装置として、揮発性を有する溶媒に屈折率整合体が溶解した屈折率整合液を保持壁に供給して保持させ、その保持壁に保持された屈折率整合液に、帯電した線状の光学部材を接近させることで屈折率整合液を光学部材の先端面に吸着させるものが知られている(例えば、特許文献1〜3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183383号公報
【特許文献2】特開2009−276784号公報
【特許文献3】特開2009−276785号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、本発明者が研究を行ったところ、屈折率整合液を保持する保持手段に屈折率整合液が供給されてからの時間経過とともに屈折率整合液の状態が変化していき、その状態の変化によって光学部材の先端面に吸着する屈折率整合液の吸着量も変化しやすいことが判明した。また、屈折率整合液の状態によっては、光学部材の側面に屈折率整合液が回り込んでしまう虞があることも判明した。特許文献1〜3に記載された光学接続部品製造装置では、屈折率整合液の供給と帯電開始との関係は考慮されていない。このため、この光学接続部品製造装置では、光学部材の先端面に吸着する屈折率整合液の量を所望の量にすることが難しく、また光学部材の周面に屈折率整合液が回り込んでしまう虞もあり、品質の高い光学接続部品を製造することが困難である。
【0005】
本発明は上記事情に鑑み、品質を高めた光学接続部品が製造できる光学接続部品製造装置および光学接続部品製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を解決する本発明の光学接続部品製造装置は、線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持する保持手段と、
前記保持手段に前記屈折率整合液を供給する供給手段と、
前記保持手段に供給された前記屈折率整合液を、前記光学部材を帯電させることで該光学部材の先端面に吸着させる帯電手段とを備え、
前記帯電手段は、前記供給手段が前記保持手段に前記屈折率整合液を供給してから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させるものであることを特徴とする。
【0007】
本発明の光学接続部品製造装置によれば、屈折率整合液における屈折率整合体の濃度が所望の濃度に達したときに光学部材を帯電させることで、所望量の屈折率整合液を光学部材の先端面に吸着させることができる。これにより、所望量の屈折率整合体が所望の位置に付着した品質の高い光学接続部品を得ることができる。
【0008】
なお、ここでいう線状の光学部材とは、太さに対して軸心方向の長さが長い光学部材であればよく、断面形状は問わない。
【0009】
本発明の光学接続部品製造装置において、前記帯電手段によって帯電した前記光学部材の先端面に帯電によるクーロン力によって、前記保持手段に保持された前記屈折率整合液が吸着する近接位置まで前記保持手段および前記光学部材のうち少なくとも一方を移動させる移動手段を備え、
前記帯電手段は、前記保持手段および前記光学部材のうち少なくとも一方を前記移動手段が前記近接位置まで移動させてから該光学部材を帯電させるものであることが好ましい。
【0010】
こうすることで、光学部材の先端面に屈折率整合液が吸着し始めるタイミングが一定になり、光学部材の先端面に吸着する屈折率整合液の量を一定量にすることができる。
【0011】
本発明の光学接続部品製造装置において、前記移動手段は、前記帯電手段が前記光学部材への帯電を停止してから、前記保持手段と該光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させるものであることも望ましい態様の1つである。
【0012】
この態様によれば、屈折率整合液が保持手段と光学部材の間で分断しやすくなり、糸引き現象が抑制され、光学部材の先端面に付着する屈折率整合液の量や形状を一定にすることができる。
【0013】
上記目的を達成する本発明の光学接続部品製造方法は、線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持手段に保持させる保持工程と、
前記保持手段に前記屈折率整合液を供給する供給工程と、
前記保持手段に供給された前記屈折率整合液を、前記光学部材を帯電させることで該光学部材の先端面に吸着させる帯電工程とを有し、
前記帯電工程は、前記供給工程によって前記保持手段に前記屈折率整合液が供給されてから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させる工程であることを特徴とする。
【0014】
本発明の光学接続部品製造方法によっても、本発明の光学接続部品製造装置と同様に、所望量の屈折率整合体が所望の位置に付着した品質の高い光学接続部品を得ることができる。
【発明の効果】
【0015】
本発明によれば、品質を高めた光学接続部品が製造できる光学接続部品製造装置および光学接続部品製造方法を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の光学接続部品製造装置の一実施形態を示す側面図である。
【図2】保持手段とノズルの一部を示す斜視図である。
【図3】本発明の光学接続部品製造装置の回路構成を表すブロック図である。
【図4】本実施形態の光学接続部品製造装置の動作を表すフローチャートである。
【図5】初期処理が完了した状態の光学接続部品製造装置を示す側面図である。
【図6】屈折率整合液が光ファイバの先端面に吸着した様子を示す図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の光学接続部品製造装置の一実施形態を説明する。この実施形態では光学部材として線状の誘電体である光ファイバを用いた場合を例にあげて説明する。
【0018】
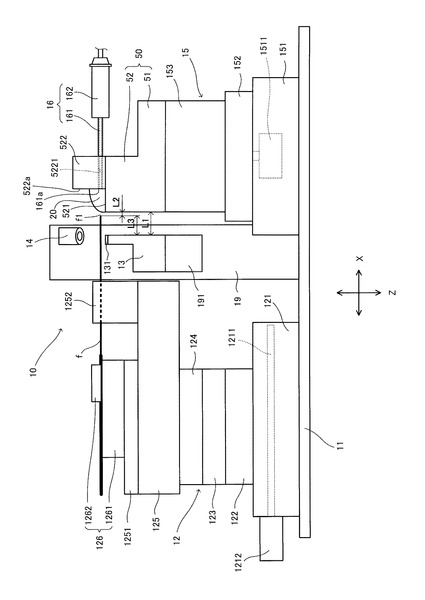
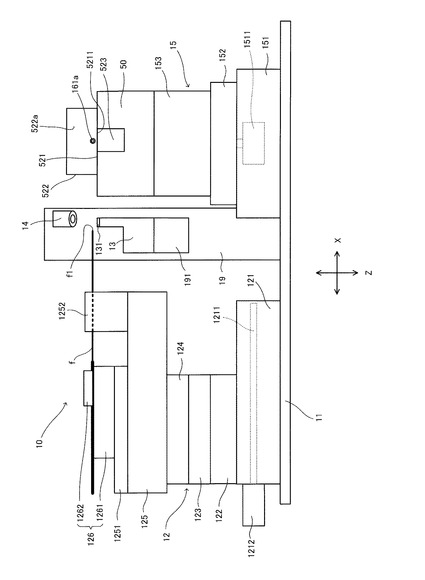
図1は、本発明の光学接続部品製造装置の一実施形態を示す側面図である。以下の説明では、図1における左右方向をX軸方向と称し、図1における上下方向をZ軸方向と称し、図1における紙面直交方向をY軸方向と称することがある。また、図1における右側をX側と称し、左側を−X側と称することがある。なお、この図1は、光学接続部品製造装置の操作者側から見た光学接続部品製造装置を示している。
【0019】
図1に示す光学接続部品製造装置10は、光ファイバfの先端面f1に屈折率整合体が付着した光学接続部品を製造する装置である。この光学接続部品製造装置10は、フレーム11、ファイバ移動ユニット12、静電気発生装置13、ファイバ検出装置14、屈折率整合液保持ユニット15、およびディスペンサ16を有する。
【0020】
ファイバ移動ユニット12は、移動基台121と、移動ステージ122と、X軸調整ステージ123と、Y軸調整ステージ124と、ファイバ保持台125と、ファイバ固定具126とを備えている。このファイバ移動ユニット12は、ファイバ保持台125に取り付けられた光ファイバfをX軸方向に移動させるものである。
【0021】
移動基台121は、フレーム11に固定されている。この移動基台121には、移動ステージ122をX軸方向に移動させる移動機構1211と、移動機構1211に接続されたX軸モータ1212が組み付けられている。移動機構1211は、回転運動を直動運動に変換するボールネジである。X軸モータ1212を駆動することで、移動機構1211が動作して移動ステージ122は任意の速度でX軸方向に移動する。移動ステージ122とともに、X軸調整ステージ123、Y軸調整ステージ124、ファイバ保持台125、ファイバ固定具126、および光ファイバfもX軸方向に移動する。移動ステージ122のX側への移動により、光ファイバfの先端面f1は屈折率整合液保持ユニット15に保持された屈折率整合液20に接近する。この光ファイバfを移動させる移動機構1211、X軸モータ1212および移動ステージ122は、本発明における移動手段の一例に相当する。図1には、光ファイバfの先端面f1が、屈折率整合液保持ユニット15に保持されている屈折率整合液20に接近した近接位置にある状態が示されている。この近接位置とは、屈折率整合液20を光ファイバfの先端面f1に吸着させる際の位置である。
【0022】
X軸調整ステージ123は、移動ステージ122に取り付けられている。このX軸調整ステージ123には図示しない調整ネジが設けられている。その調整ネジを回すことで移動ステージ122に対するX軸調整ステージ123のX軸方向の位置が調整される。また、Y軸調整ステージ124は、X軸調整ステージ123に取り付けられている。このY軸調整ステージ124には図示しない調整ネジが設けられている。その調整ネジを回すことでX軸調整ステージ123に対するY軸調整ステージ124のY軸方向の位置が調整される。ファイバ保持台125は、Y軸調整ステージ124に固定されている。すなわち、ファイバ保持台125は、X軸調整ステージ123及びY軸調整ステージ124を介して移動ステージ122に取り付けられることで、移動ステージ122に対するX軸方向とY軸方向の位置が調整可能な構成になっている。これらの調整ステージ123、124は、ファイバ保持台125に取り付けれた光ファイバfの、X軸方向とY軸方向の位置を調整するためのものである。
【0023】
ファイバ保持台125の−X側(図1における左側)部分にはファイバ取付部1251が設けられ、ファイバ保持台125のX側(図1における右側)部分には位置規制部1252が設けられている。ファイバ取付部1251の上には、ファイバ取付部1251に対して着脱自在にファイバ固定具126が取り付けられている。このファイバ固定具126は、ファイバ載置部材1261と押さえ部材1262とから構成されている。
【0024】
光ファイバfは、先端面f1から所定長(たとえば、40mm)にわたって被覆が除去された状態で、ファイバ載置部材1261と押さえ部材1262との間に挟まれることでファイバ固定具126に固定されている。なお、光ファイバfの、ファイバ載置部材1261と押さえ部材1262との間に挟まれている部分は、被覆の残存する部分である。位置規制部1252には、X軸方向から見てV字型をしたV溝が形成されている。そのV溝の傾斜面に光ファイバf先端側部分の外周面を密接させることで、光ファイバfの先端側部分は、Y軸方向およびZ軸方向の位置が規制されている。光ファイバfは、ファイバ固定具126に固定された状態でファイバ保持台125に取り付けられ、位置規制部1252により先端側部分の位置が規制されることで、その軸心をX軸方向に向けてファイバ保持台125に取り付けられている。
【0025】
ファイバ移動ユニット12よりもX側には、フレーム11に固定されたブラケット19が設けられている。このブラケット19には、Y軸方向に延在する支柱191が固定されている。また、その支柱191には静電気発生装置13が固定されている。つまり、静電気発生装置13は、支柱191とブラケット19とを介してフレーム11に固定されることで、光学接続部品製造装置10内の位置が固定されている。静電気発生装置13は、ファイバ移動ユニット12に取り付けられた光ファイバfに電荷を付与するものである。すなわち、静電気発生装置13は、ファイバ移動ユニット12に取り付けられた光ファイバfを帯電させるものであり本発明における帯電手段の一例に相当する。この静電気発生装置13の上端部分には、セラミックスなどの誘電体の内部に電極が埋め込まれた板状の電極シート131が設けられている。電極シート131とファイバ移動ユニット12に取り付けられた光ファイバfとは高さ方向(Z軸方向)に0.1〜0.2mmの隙間が設けられている。電極シート131の電極に電圧が印加されると、光ファイバfは、電極シート131とは非接触状態を保ったまま帯電し静電気を帯びる。光ファイバfと電極シート131との非接触状態が保たれているので、光ファイバfに接触による傷が付くことはない。なお、静電気発生装置13の代わりに、コロナ放電などを利用して光ファイバfを帯電させる帯電手段を用いても良い。
【0026】
また、ブラケット19には、図示しないアームを介してファイバ検出装置14が取り付けられている。このファイバ検出装置14は、光ファイバfの先端面f1を検出するセンサである。ファイバ保持台125に取り付けられた光ファイバfは、移動ステージ122のX軸方向の移動に伴ってX軸方向に移動する。ファイバ検出装置14は、そのX軸方向の移動により光ファイバfの先端面f1が所定の位置(ここでは、電極シート131の真上)に到達したことを検出するものである。
【0027】
屈折率整合液保持ユニット15は、回転基台151と、回転ステージ152と、Z軸調整ステージ153と、屈折率整合液20を保持する保持手段50とを備えている。回転基台151は、フレーム11に固定されている。この回転基台151には、回転ステージ152を回転させる回転モータ1511が組み付けられている。回転ステージ152は、回転基台151の上に回転可能に取り付けられている。回転モータ1511を駆動することで、回転ステージ152はZ軸方向の軸を回転中心軸にして回転する。
【0028】
Z軸調整ステージ153は、回転ステージ152に取り付けられている。このZ軸調整ステージ153には図示しない調整ネジが設けられている。その調整ネジを回すことで回転ステージ152に対するZ軸調整ステージ153のZ軸方向の位置が調整される。保持手段50は、Z軸調整ステージ153に固定されている。すなわち、保持手段50は、Z軸調整ステージ153を介して回転ステージ152に取り付けられており、回転ステージ152に対するZ軸方向の位置が調整自在になっている。このZ軸調整ステージ153は、ファイバ保持台125に取り付けれた光ファイバfの先端面f1と屈折率整合液保持ユニット15に保持された屈折率整合液20とのZ軸方向の相対的な位置を調整するためのものである。
【0029】
保持手段50は、Z軸調整ステージ153に固定されている。この保持手段50は、台座部51と、その台座部51から上方に突出した本体部52とが一体に形成された樹脂製のものである。本体部52の上側部分には、側方に広がった保持面521と、保持面521よりも上方に立ち上がった壁部522とが設けられている。この壁部522には、保持面521側の壁面522aに開口を有する貫通孔5221が設けられている。回転ステージ152が回転すると、回転ステージ152、Z軸調整ステージ153、およびディスペンサ16とともに保持手段50も回転する。図1には、保持手段50の保持面521が光ファイバf側(−X側)に向いた供給姿勢にある状態が示されている。
【0030】
ディスペンサ16は、ノズル161とシリンダ162とから構成されている。このシリンダ162内部には、屈折率整合液20が蓄えられている。シリンダ162は、図示しないコンプレッサに接続されており、コンプレッサからエアが供給されると、シリンダ162内部に蓄えられた屈折率整合液20をノズル161から吐出する。すなわち、本実施形態におけるディスペンサ16は、本発明における供給手段の一例に相当する。シリンダ162は、図示しないアームによってZ軸調整ステージ153に固定されている。
【0031】
図1に示すように、ノズル161は、壁部522に設けられた貫通孔5221に挿入されている。ノズル161の先端161aの位置は、壁部522における保持面521側の壁面522aの位置に一致している。後述するように、光ファイバfの先端面f1に屈折率整合液20を付着させた後、残った屈折率整合液20を拭き取る作業を行う場合がある。その作業の際、ノズル161の先端161aを拭き取らないと、その先端161aに残った屈折率整合液20が固化し、ノズル161から吐出される屈折率整合液20の吐出方向が変わってしまったり、ノズル161が詰まってしまう虞がある。ノズル161の先端161aを壁面522aに一致させることで、壁面522aに残った屈折率整合液20とノズル161の先端161aとを同時に拭き取ることが可能になり、拭き取り作業を簡略化できる。
【0032】
ノズル161から吐出された屈折率整合液20は、保持面521の上に供給され、その表面張力によって保持面521の上に保持される。屈折率整合液20は、揮発性を有する溶媒に屈折率整合体が溶解した溶液である。この屈折率整合液20は、液中の溶媒が揮発することで固化し、弾性を有するゲル状の屈折率整合体が残る。屈折率整合体は、光ファイバfの屈曲率に近似した屈曲率と、光ファイバfに対して適度な粘着性を有する材料である。本実施形態では、屈折率整合体として、耐環境性や接着性のよいアクリル系の高分子材料を用いているが、その他の高分子材料を用いてもよい。
【0033】
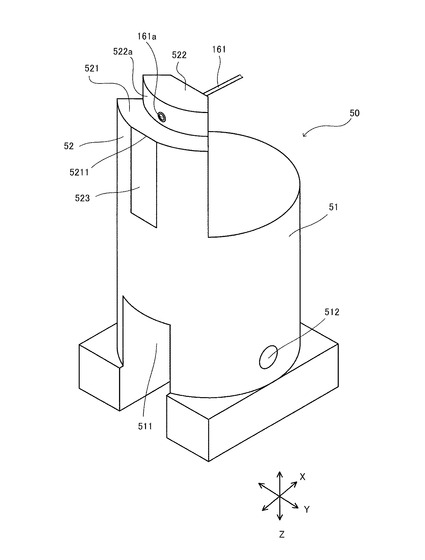
図2は、保持手段50とノズル161の一部を示す斜視図である。この図2では、図1と同様に供給姿勢にある保持手段50が示されている。
【0034】
台座部51には下端から上方に切り欠かれた切欠部511が設けられている。また、台座部51の側面にはネジ穴512が設けられている。図1に示すZ軸調整ステージ153に設けられた図示しない突条に切欠部511が嵌め合わせられることで、保持手段50はZ軸調整ステージ153に対して所定の位置に配置されている。また、ネジ穴512に図示しないネジを締め込むことで、保持手段50はZ軸調整ステージ153に固定されている。
【0035】
図2に示すように、本体部52の最も−X側部分には、X軸と直交する方向に延在する平面523が形成されている。本体部52に形成された保持面521は、側方に広がった水平面を成しており、平面視では略扇形をしている。なお、保持面521は、必ずしも水平面である必要はなく、傾斜していてもよく、凹凸を有していてもよい。ただし、水平面或いは略水平な面とすることで、保持面521の上に供給された屈折率整合液20が早期に一定の形状で安定しやすくなる。保持面521と平面523との境界部分には、鉛直方向に直交する方向、すなわち水平方向に直線状に延在する縁部5211が形成されている。本実施形態では、この縁部5211の延在方向はY軸方向と一致している。なお、縁部5211は、水平方向或いは略水平方向に延在していれば、円弧形状など直線形状以外の形状であってもよく、またY軸方向と一致していなくてもよい。壁部522は、保持面521における、縁部5211とは反対側(X側)に設けられている。
【0036】
ディスペンサ16は、ノズル161の先端161aから保持面521に沿って縁部5211に向かって屈折率整合液20を吐出することで保持面521に屈折率整合液20を供給する。屈折率整合液20を縁部5211に向けて吐出することで、屈折率整合液20を縁部5211まで早期に確実に到達させることができる。ディスペンサ16によって、保持面521の上に供給された屈折率整合液20の表面は、保持面521の上を側方に向かって広がっていく。そして、縁部5211に達した屈折率整合液20は、その表面張力によって縁部5211の上に略円弧状に盛り上がっていく。ディスペンサ16は、屈折率整合液20の表面張力によって屈折率整合液20が縁部5211の上に盛り上がるまで屈折率整合液20を供給し、縁部5211から屈折率整合液20が垂れ落ちる前に供給を停止する。なお、図1には、屈折率整合液20が縁部5211の上に盛り上がり、ディスペンサ16が屈折率整合液20の供給を停止した状態を示されている。
【0037】
近接位置にある光ファイバfは、X軸方向を軸心として延在し、供給姿勢にある保持手段50の縁部5211はY軸方向に延在している。すなわち、本実施形態における縁部5211は、近接位置にある光ファイバfの軸心と直交する方向に延在する構成になっている。この構成により、近接位置にある光ファイバfの先端面f1が光ファイバfの湾曲癖などによって縁部5211の延在方向(Y軸方向)にずれてしまった場合でも、光ファイバfと屈折率整合液20との間の距離は殆ど変化せずに一定に保たれる。この距離が一定に保たれることで、光ファイバfを帯電させて屈折率整合液20を光ファイバfの先端面f1に吸着させた際に、光ファイバfの先端面f1に吸着する屈折率整合液20の量を一定量にすることができる。また、ファイバ移動ユニット12のY軸調整ステージ124によるY軸方向の位置調整を厳密に行う必要がなくなり、調整作業が容易になる。なお、縁部5211は、近接位置にある光ファイバfの軸心と完全に直交させる必要はないが、直交に近いほど、近接位置にある光ファイバfがY軸方向にずれてしまった場合でも、光ファイバfと屈折率整合液20との距離の変化を小さくすることができる。従って、屈折率整合液20を光ファイバfの先端面f1に吸着させる際には、近接位置にある光ファイバfの軸心に対して、直交あるいは略直交する方向に縁部5211を延在させることが好ましい。
【0038】
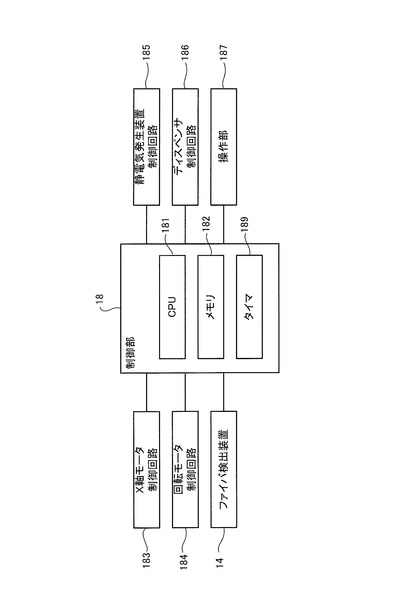
図3は、本発明の光学接続部品製造装置10の回路構成を表すブロック図である。
【0039】
制御部18は、X軸モータ制御回路183、回転モータ制御回路184、静電気発生装置制御回路185、ディスペンサ制御回路186、操作部187およびファイバ検出装置14それぞれに接続されている。また、制御部18は、内部にCPU(中央演算処理装置)181とメモリ182とタイマ189とを備えている。このメモリ182には、光学接続部品製造装置10の動作プログラムが記憶されている。CPU181は、メモリ182に記憶された動作プログラムを読み出し、その動作プログラムに従って各制御回路に指令を出すものである。
【0040】
X軸モータ制御回路183は、制御部18からの指令に従いX軸モータ1212の動作を制御する回路である。回転モータ制御回路184は、制御部18からの指令に従い回転モータ1511の動作を制御する回路である。静電気発生装置制御回路185は、制御部18からの指令に従い静電気発生装置13の電極に電圧を印加する回路である。ディスペンサ制御回路186は、ディスペンサ16に接続されたコンプレッサの動作を制御することでディスペンサ16から吐出される屈折率整合液20の吐出量を制御する回路である。また、操作部187には、光学接続部品製造装置10の操作者による操作を受け付ける各種のボタンが設けられている。
【0041】
続いて、光学接続部品製造装置10の動作を説明する。
【0042】
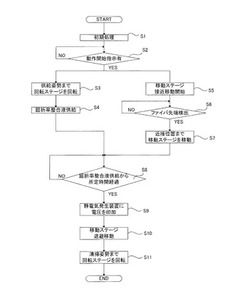
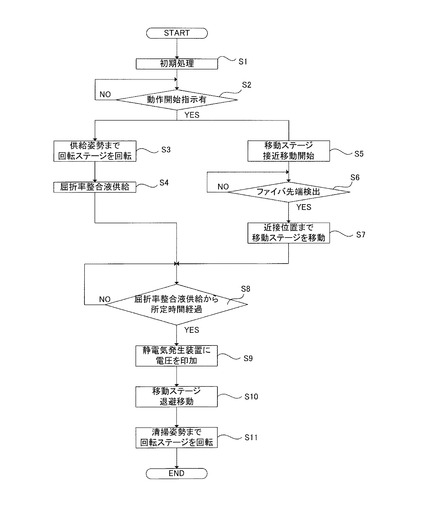
図4は、本実施形態の光学接続部品製造装置10の動作を表すフローチャートである。
【0043】
光学接続部品製造装置10の電源が投入されると、CPU181はメモリ182から動作プログラムを読み出して初期処理を行う(ステップS1)。この初期処理では、制御部18は、X軸モータ制御回路183および回転モータ制御回路184に指令を出し、X軸モータ1212および回転モータ1511を動作させる。
【0044】
図5は、初期処理が完了した状態の光学接続部品製造装置10を示す側面図である。
【0045】
初期処理が完了した状態では、移動ステージ122は、屈折率整合液保持ユニット15から離間した離間位置で停止している。また、回転ステージ152は、図1に示す状態からZ軸を回転中心軸として90度回転し、ノズル161の先端161aが、図5における手前側、すなわち光学接続部品製造装置10の操作者側に向いた清掃姿勢で停止している。なお、この清掃姿勢では、縁部5211も図5における手前側に位置している。この初期処理の後、光学接続部品製造装置10の操作者は、光ファイバfの長さや太さなどに応じて、近接位置にある光ファイバfと供給姿勢にある保持面521とが所定の位置関係になるように各調整ステージ123、124、153の位置を調整する。
【0046】
次に、制御部18は、光学接続部品製造装置10の操作者が操作部187に設けられた動作開始ボタンを押すまで待機する(ステップS2)。動作開始ボタンが押されたら(ステップS2でYES)、制御部18は、回転モータ制御回路184に指令を出し、縁部5211が保持手段50の−X側端部に位置し、縁部5211の延在方向がY軸方向に一致する供給姿勢になるまで回転モータ1511を駆動する(ステップS3)。
【0047】
その後、制御部18は、ディスペンサ制御回路186に指令を出し、表面張力によって縁部5211の上に屈折率整合液20が盛り上がる量の屈折率整合液20をディスペンサ16から供給する(ステップS4)。さらに、ディスペンサ16からの屈折率整合液20の供給を開始した時点で、制御部18は、タイマ189を動作させて時間の測定を開始する。この本実施形態では、ディスペンサ16から屈折率整合液20の供給を開始した時点でタイマ189による時間の測定を開始したが、供給終了時点でタイマ189による時間の測定を開始してもよい。なお、この屈折率整合液20の供給量は、あらかじめ光学接続部品製造装置10の操作者が試験的にディスペンサ16からの供給を行って縁部5211の上に屈折率整合液20が盛り上がる量を求め、操作部187を用いて指定した量である。
【0048】
また、動作開始ボタンが押されたら(ステップS2でYES)、制御部18は、回転モータ制御回路184に指令を出すのと同時に、X軸モータ制御回路183にも指令を出し、移動ステージ122のX側への移動を開始させる(ステップS5)。ファイバ検出装置14は、光ファイバfの先端面f1が電極シート131の真上に到達したか否かを検出し、到達したら制御部18に到達信号を送信する(ステップS6)。制御部18は、ファイバ検出装置14からの到達信号を受信したら、その受信したときからさらに移動ステージ122を所定距離移動させる。この移動により、光ファイバfの先端面f1は、屈折率整合液保持ユニット15に保持されている屈折率整合液20に接近した近接位置に配置される(ステップS7)。図1には、光ファイバfが近接位置にある状態、すなわちステップS7が完了した状態が示されている。図1に示すように、静電気発生装置13が固定された位置は、供給姿勢にある保持手段50の縁部5211からX軸方向に所定距離(ここでは第1の距離L1)だけ離れた位置である。また、近接位置にある光ファイバfの先端面f1の位置は、供給姿勢にある保持手段50の縁部5211から一定の距離(ここでは第2の距離L2)だけ離れた位置にある。従って、光ファイバfの先端面f1と静電気発生装置13とのX軸方向の間隔は、第1の距離L1と第2の距離L2によって定まる第3の距離L3になる。すなわち、本実施形態の構成では、縁部5211からX軸方向に第1の距離L1だけ離れた近接位置に光ファイバfの先端面f1を移動させることで、光学接続部品製造装置10を複数回動作させる場合、光ファイバfの先端面f1と静電気発生装置13とのX軸方向の距離L3は、再現性よく毎回一定になる。この距離L3が一定になると、光ファイバfの先端面f1の帯電量が一定になり、その結果、光ファイバfの先端面f1に吸着する屈折率整合液20の量を一定量にすることができる。静電気発生装置13を移動ステージ122に設け、光ファイバfと一緒に移動させる構成では、光ファイバfを移動ステージ122に取り付ける際に、光ファイバfの先端面f1を静電気発生装置13に対して厳密に位置合わせしないと、光ファイバfを取り付ける度に光ファイバfの先端面f1と静電気発生装置13との相対位置がずれてしまう。この相対位置がずれると、光ファイバfの先端面f1の帯電量が一定にならず、光ファイバfの先端面f1に吸着する屈折率整合液20の吸着量が一定量にならない。本実施形態のように、静電気発生装置13を固定配置し、光ファイバfを移動させる構成にすることで、光ファイバfを移動ステージ122に取り付ける際の位置合わせを厳密に行なわなくても、上記第3の距離L3を一定にすることができる。なお、静電気発生装置13を、移動ステージ122とは別の移動台に取り付け、屈折率整合液20を光ファイバfの先端面f1に吸着させる際に、供給姿勢にある保持手段50の縁部5211からX軸方向に第1の距離だけ離れた位置にその移動台の移動によって配置する構成としてもよい。
【0049】
続いて、制御部18は、タイマ189が動作してからあらかじめ定めた時間が経過したか監視し、あらかじめ定めた時間が経過するまで待機する。このあらかじめ定めた時間は、ディスペンサ16が保持面521に屈折率整合液20を供給してから、屈折率整合液20の溶媒が揮発することで屈折率整合液20における屈折率整合体の濃度が所望の濃度に達するまでに必要な時間である。所望の濃度に達するまでに必要な時間は、光学接続部品製造装置10の操作者が試験的に求め、操作部187を用いて指定した量である。なお、単位時間あたりの揮発量が分かっている場合には、その揮発量に基づいて所望の濃度に達するまでに必要な時間を求めてもよい。屈折率整合体の濃度が低すぎると、光ファイバfの先端面f1に付着する屈折率整合液20の付着量が少なくなってしまう虞がある。また、屈折率整合体の濃度が低すぎると、光ファイバfの先端面f1から光ファイバfの周面(側面)に屈折率整合液20が回り込んでしまう虞もある。逆に屈折率整合体の濃度が高すぎると、光ファイバfの先端面f1に付着する屈折率整合液20の付着量が多くなりすぎる虞がある。また、屈折率整合体の濃度が高すぎると、後述するS10の処理において光ファイバfの先端面f1に付着した屈折率整合液20と、保持面521の上にある屈折率整合液20とを分断しにくくなり、所謂糸引き現象が発生する虞もある。糸引き現象が発生すると、光ファイバfの先端面f1に吸着する屈折率整合液20の量や形状が安定し難くなる。本実施形態では、屈折率整合液20における屈折率整合体の濃度が所望の濃度に達したときに光ファイバfを帯電させることで、所望量の屈折率整合液20を光ファイバfの先端面f1のみに吸着させることができる。なお、S3の処理に必要な時間と上記あらかじめ定めた時間の合計時間は、S5〜S7の処理に必要な時間よりも長い時間である。これに対し、仮にS5〜S7の処理に必要な時間の方が長い場合は、S4の処理開始時間を遅延時間分遅らせてS3の処理に必要な時間と遅延時間と上記あらかじめ定めた時間の合計時間をS5〜S7の処理に必要な時間よりも長くすればよい。
【0050】
あらかじめ定めた時間が経過したら(ステップS8でYES)、制御部18は、静電気発生装置制御回路185に指令を出し、静電気発生装置13の電極シート131に電圧を印加する。電圧を印加することで、光ファイバfは帯電して先端面f1に屈折率整合液20が吸着する。そして、所定時間(ここでは1秒間)経過したら電圧の印加を停止させる(ステップS9)。上述したように、電圧を印加した時点では、移動ステージ122の移動(ステップS7の処理)は完了しており、光ファイバfは近接位置まで移動しているので、光ファイバfが近接位置にある状態で帯電は開始される。光ファイバfを帯電させながら近接位置に向かって移動させた場合、光ファイバfの先端面f1に屈折率整合液20が吸着し始めるタイミングが不明であり、またそのタイミングも環境温度や湿度によって異なってしまう虞がある。光ファイバfの先端面f1に吸着する屈折率整合液20の量は、吸着し始めてから帯電を完了する間の時間によって変化する。このため、そのタイミングが不明であると、屈折率整合液20が光ファイバfの先端面f1に吸着する量も不明になってしまう。また、そのタイミングが異なると、屈折率整合液20が光ファイバfの先端面f1に吸着する量は一定量にならない。本実施形態では、光ファイバfを近接位置に移動させてから光ファイバfを帯電させるので、光ファイバfの先端面f1に屈折率整合液20が吸着し始めるタイミングが一定になり、光ファイバfの先端面f1に吸着する屈折率整合液20の量を所望の一定量にすることができる。
【0051】
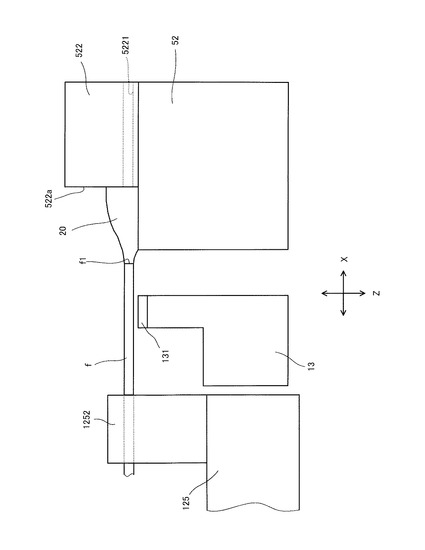
図6は、屈折率整合液20が光ファイバfの先端面f1に吸着した様子を示す図である。なお、図6では、光ファイバf、ファイバ載置部材1261の一部、静電気発生装置13の一部、屈折率整合液保持ユニット15の一部、および保持面521に保持された屈折率整合液20を示し、その他の構成については省略している。
【0052】
図6に示すように、光ファイバfが帯電して静電気を帯びると、その静電気によるクーロン力によって、屈折率整合液20の、縁部5211の上に盛り上がった部分が、光ファイバfの先端面f1に吸着する。上述したように、本実施形態の光学接続部品製造装置10では、ファイバ検出装置14が光ファイバfの先端面f1を検出した位置を基準として移動ステージ122を所定距離移動させる。従って、光学接続部品製造装置10を複数回動作させて複数の光学接続部品を製造する場合でも、光ファイバfが帯電する際の光ファイバfの先端面f1と静電気発生装置13との距離は一定である。この距離を一定にすることで、先端面f1の帯電量は常に一定になり、先端面f1に吸着する屈折率整合液20の量を再現性よく一定量にすることができる。
【0053】
電極シート131による電圧の印加を停止させた後、制御部18は、X軸モータ制御回路183に指令を出し、移動ステージ122を−X側に移動させる(ステップS10)。これにより、先端面f1に屈折率整合液20が付着した光ファイバfが得られる。ところで、電圧を印加したまま移動ステージ122を−X側に移動した場合、光ファイバfの先端面f1と保持面521の上それぞれに表面張力により付着した屈折率整合液20が分断しにくくなり、糸引き現象が発生する虞がある。本実施形態では、電圧の印加を停止した後に移動ステージ122を−X側に移動させて光ファイバfと保持手段50とを離間する構成としている。この構成により、光ファイバfの先端面f1と保持面521の上それぞれに付着した屈折率整合液20を分断しやすくなり、糸引き現象の発生が抑制される。糸引き現象の発生を抑制することで、光ファイバfの先端面f1に付着する屈折率整合液20の量や形状を一定にすることができる。また、移動ステージ122を−X側に移動させる速度が遅い場合も、糸引き現象が発生する虞がある。本実施形態では、移動ステージ122を−X側に移動させる速度を3mm/sec以上にしている。なお、糸引き現象の発生をより確実に抑制するために、移動ステージ122を−X側に移動させる速度は、5mm/sec以上にすることがより好ましい。
【0054】
屈折率整合液20は、その液中の溶媒が揮発することで固化し、弾性を有するゲル状の屈折率整合体になる。この屈折率整合体が光ファイバfの先端面f1に付着した部品が光学接続部品である。なお、溶媒の揮発は、通常環境下でも起こるが、揮発を促進するために強制乾燥させてもよい。
【0055】
最後に、制御部18は、回転モータ制御回路184に指令を出し、ノズル161の先端161aが図1における手前側になる清掃姿勢になるまで回転モータ1511を駆動し(ステップS11)、一連の処理を終了する。
【0056】
光学接続部品製造装置10の使用者は、保持面521の上に残った屈折率整合液20を拭き取る作業を行う。また、光学接続部品製造装置10の使用者は、先端面f1に屈折率整合液20が付着した光ファイバfをファイバ固定具126とともに光学接続部品製造装置10から取り外す。そして、新たな光ファイバfをファイバ固定具126に固定し、そのファイバ固定具126を光学接続部品製造装置10に取り付ける。その後、操作部187に設けられた動作開始ボタンを押すことで、ステップS3以降の処理が行われる。これらの動作を繰り返し行うことで、所望個数の光学接続部品が製造できる。
【0057】
以上説明したように、本実施形態の光学接続部品製造装置10および光学接続部品製造方法によれば、屈折率整合液20における屈折率整合体の濃度が所望の濃度に達したときに光ファイバfを帯電させることで、所望量の屈折率整合液20を光ファイバfの先端面f1のみに吸着させることができる。また、糸引き現象も抑制することができる。光ファイバfの先端面f1に所望量の屈折率整合液20を吸着させることで、その屈折率整合液20の溶媒を揮発させた屈折率整合体の量を所望の量にすることができる。これにより、所望量の屈折率整合体が光ファイバfの先端面に付着した品質の高い光学接続部品を得ることができる。
【0058】
本発明は上述の実施の形態に限られることなく特許請求の範囲に記載した範囲で種々の変更を行うことが出来る。例えば、本実施形態では、光ファイバfを屈折率整合液20側に移動させる構成としたが、光ファイバfを移動させずに、屈折率整合液保持ユニット15を移動させることで屈折率整合液20を光ファイバf側に移動する構成としてもよい。また、光ファイバfと屈折率整合液20の両方を移動する構成としてもよい。また、本実施形態では、光ファイバfを、その軸心方向であるX軸方向に移動させることで近接位置に移動させる構成としたが、その他の方向に移動させることで近接位置に移動させる構成としてもよく、Z軸方向の軸あるいはY軸方向の軸を回転中心軸として回転させることで近接位置に移動させる構成としてもよい。また、本実施形態では、光学部材として光ファイバfを用いたが、ロッドレンズなどの他の光学部材を用いてもよく、光学部材以外のガラス、セラミックス、プラスチックなどの線状の誘電体を用いてもよい。さらに、本実施形態では、屈折率整合液20を光ファイバfの先端面f1に吸着させたが、屈折率整合液20以外の液状の高分子材料を用いて線状の誘電体の先端面に高分子材料被膜を形成してもよい。また、本実施形態では、保持面521に屈折率整合液20を供給してから光ファイバfを移動させて近接位置に配置したが、光ファイバfを近接位置まで移動させてから保持面521に屈折率整合液20を供給してもよい。
【0059】
なお、以上説明した各変形例の記載それぞれにのみ含まれている構成要件であっても、その構成要件を他の変形例に適用してもよい。
【符号の説明】
【0060】
10 光学接続部品製造装置
13 静電気発生装置
16 ディスペンサ
20 屈折率整合液
50 保持手段
122 移動ステージ
161 ノズル
521 保持面
522 壁部
1211 移動機構
1212 X軸モータ
5211 縁部
5221 貫通孔
f 光ファイバ
【技術分野】
【0001】
本発明は、線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置および線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法に関する。
【背景技術】
【0002】
従来、光学部材どうしを接続する光学接続部品として、線状の光学部材の先端面に屈折率整合体を付着させたものが知られている。この光学接続部品は、光学部材の、屈折率整合体が付着した先端面に、他の光学部材の端面を押し付けることで光学接続部品と他の光学部材を接続するものである。その光学接続部品を製造する光学接続部品製造装置として、揮発性を有する溶媒に屈折率整合体が溶解した屈折率整合液を保持壁に供給して保持させ、その保持壁に保持された屈折率整合液に、帯電した線状の光学部材を接近させることで屈折率整合液を光学部材の先端面に吸着させるものが知られている(例えば、特許文献1〜3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183383号公報
【特許文献2】特開2009−276784号公報
【特許文献3】特開2009−276785号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、本発明者が研究を行ったところ、屈折率整合液を保持する保持手段に屈折率整合液が供給されてからの時間経過とともに屈折率整合液の状態が変化していき、その状態の変化によって光学部材の先端面に吸着する屈折率整合液の吸着量も変化しやすいことが判明した。また、屈折率整合液の状態によっては、光学部材の側面に屈折率整合液が回り込んでしまう虞があることも判明した。特許文献1〜3に記載された光学接続部品製造装置では、屈折率整合液の供給と帯電開始との関係は考慮されていない。このため、この光学接続部品製造装置では、光学部材の先端面に吸着する屈折率整合液の量を所望の量にすることが難しく、また光学部材の周面に屈折率整合液が回り込んでしまう虞もあり、品質の高い光学接続部品を製造することが困難である。
【0005】
本発明は上記事情に鑑み、品質を高めた光学接続部品が製造できる光学接続部品製造装置および光学接続部品製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を解決する本発明の光学接続部品製造装置は、線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持する保持手段と、
前記保持手段に前記屈折率整合液を供給する供給手段と、
前記保持手段に供給された前記屈折率整合液を、前記光学部材を帯電させることで該光学部材の先端面に吸着させる帯電手段とを備え、
前記帯電手段は、前記供給手段が前記保持手段に前記屈折率整合液を供給してから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させるものであることを特徴とする。
【0007】
本発明の光学接続部品製造装置によれば、屈折率整合液における屈折率整合体の濃度が所望の濃度に達したときに光学部材を帯電させることで、所望量の屈折率整合液を光学部材の先端面に吸着させることができる。これにより、所望量の屈折率整合体が所望の位置に付着した品質の高い光学接続部品を得ることができる。
【0008】
なお、ここでいう線状の光学部材とは、太さに対して軸心方向の長さが長い光学部材であればよく、断面形状は問わない。
【0009】
本発明の光学接続部品製造装置において、前記帯電手段によって帯電した前記光学部材の先端面に帯電によるクーロン力によって、前記保持手段に保持された前記屈折率整合液が吸着する近接位置まで前記保持手段および前記光学部材のうち少なくとも一方を移動させる移動手段を備え、
前記帯電手段は、前記保持手段および前記光学部材のうち少なくとも一方を前記移動手段が前記近接位置まで移動させてから該光学部材を帯電させるものであることが好ましい。
【0010】
こうすることで、光学部材の先端面に屈折率整合液が吸着し始めるタイミングが一定になり、光学部材の先端面に吸着する屈折率整合液の量を一定量にすることができる。
【0011】
本発明の光学接続部品製造装置において、前記移動手段は、前記帯電手段が前記光学部材への帯電を停止してから、前記保持手段と該光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させるものであることも望ましい態様の1つである。
【0012】
この態様によれば、屈折率整合液が保持手段と光学部材の間で分断しやすくなり、糸引き現象が抑制され、光学部材の先端面に付着する屈折率整合液の量や形状を一定にすることができる。
【0013】
上記目的を達成する本発明の光学接続部品製造方法は、線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持手段に保持させる保持工程と、
前記保持手段に前記屈折率整合液を供給する供給工程と、
前記保持手段に供給された前記屈折率整合液を、前記光学部材を帯電させることで該光学部材の先端面に吸着させる帯電工程とを有し、
前記帯電工程は、前記供給工程によって前記保持手段に前記屈折率整合液が供給されてから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させる工程であることを特徴とする。
【0014】
本発明の光学接続部品製造方法によっても、本発明の光学接続部品製造装置と同様に、所望量の屈折率整合体が所望の位置に付着した品質の高い光学接続部品を得ることができる。
【発明の効果】
【0015】
本発明によれば、品質を高めた光学接続部品が製造できる光学接続部品製造装置および光学接続部品製造方法を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の光学接続部品製造装置の一実施形態を示す側面図である。
【図2】保持手段とノズルの一部を示す斜視図である。
【図3】本発明の光学接続部品製造装置の回路構成を表すブロック図である。
【図4】本実施形態の光学接続部品製造装置の動作を表すフローチャートである。
【図5】初期処理が完了した状態の光学接続部品製造装置を示す側面図である。
【図6】屈折率整合液が光ファイバの先端面に吸着した様子を示す図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の光学接続部品製造装置の一実施形態を説明する。この実施形態では光学部材として線状の誘電体である光ファイバを用いた場合を例にあげて説明する。
【0018】
図1は、本発明の光学接続部品製造装置の一実施形態を示す側面図である。以下の説明では、図1における左右方向をX軸方向と称し、図1における上下方向をZ軸方向と称し、図1における紙面直交方向をY軸方向と称することがある。また、図1における右側をX側と称し、左側を−X側と称することがある。なお、この図1は、光学接続部品製造装置の操作者側から見た光学接続部品製造装置を示している。
【0019】
図1に示す光学接続部品製造装置10は、光ファイバfの先端面f1に屈折率整合体が付着した光学接続部品を製造する装置である。この光学接続部品製造装置10は、フレーム11、ファイバ移動ユニット12、静電気発生装置13、ファイバ検出装置14、屈折率整合液保持ユニット15、およびディスペンサ16を有する。
【0020】
ファイバ移動ユニット12は、移動基台121と、移動ステージ122と、X軸調整ステージ123と、Y軸調整ステージ124と、ファイバ保持台125と、ファイバ固定具126とを備えている。このファイバ移動ユニット12は、ファイバ保持台125に取り付けられた光ファイバfをX軸方向に移動させるものである。
【0021】
移動基台121は、フレーム11に固定されている。この移動基台121には、移動ステージ122をX軸方向に移動させる移動機構1211と、移動機構1211に接続されたX軸モータ1212が組み付けられている。移動機構1211は、回転運動を直動運動に変換するボールネジである。X軸モータ1212を駆動することで、移動機構1211が動作して移動ステージ122は任意の速度でX軸方向に移動する。移動ステージ122とともに、X軸調整ステージ123、Y軸調整ステージ124、ファイバ保持台125、ファイバ固定具126、および光ファイバfもX軸方向に移動する。移動ステージ122のX側への移動により、光ファイバfの先端面f1は屈折率整合液保持ユニット15に保持された屈折率整合液20に接近する。この光ファイバfを移動させる移動機構1211、X軸モータ1212および移動ステージ122は、本発明における移動手段の一例に相当する。図1には、光ファイバfの先端面f1が、屈折率整合液保持ユニット15に保持されている屈折率整合液20に接近した近接位置にある状態が示されている。この近接位置とは、屈折率整合液20を光ファイバfの先端面f1に吸着させる際の位置である。
【0022】
X軸調整ステージ123は、移動ステージ122に取り付けられている。このX軸調整ステージ123には図示しない調整ネジが設けられている。その調整ネジを回すことで移動ステージ122に対するX軸調整ステージ123のX軸方向の位置が調整される。また、Y軸調整ステージ124は、X軸調整ステージ123に取り付けられている。このY軸調整ステージ124には図示しない調整ネジが設けられている。その調整ネジを回すことでX軸調整ステージ123に対するY軸調整ステージ124のY軸方向の位置が調整される。ファイバ保持台125は、Y軸調整ステージ124に固定されている。すなわち、ファイバ保持台125は、X軸調整ステージ123及びY軸調整ステージ124を介して移動ステージ122に取り付けられることで、移動ステージ122に対するX軸方向とY軸方向の位置が調整可能な構成になっている。これらの調整ステージ123、124は、ファイバ保持台125に取り付けれた光ファイバfの、X軸方向とY軸方向の位置を調整するためのものである。
【0023】
ファイバ保持台125の−X側(図1における左側)部分にはファイバ取付部1251が設けられ、ファイバ保持台125のX側(図1における右側)部分には位置規制部1252が設けられている。ファイバ取付部1251の上には、ファイバ取付部1251に対して着脱自在にファイバ固定具126が取り付けられている。このファイバ固定具126は、ファイバ載置部材1261と押さえ部材1262とから構成されている。
【0024】
光ファイバfは、先端面f1から所定長(たとえば、40mm)にわたって被覆が除去された状態で、ファイバ載置部材1261と押さえ部材1262との間に挟まれることでファイバ固定具126に固定されている。なお、光ファイバfの、ファイバ載置部材1261と押さえ部材1262との間に挟まれている部分は、被覆の残存する部分である。位置規制部1252には、X軸方向から見てV字型をしたV溝が形成されている。そのV溝の傾斜面に光ファイバf先端側部分の外周面を密接させることで、光ファイバfの先端側部分は、Y軸方向およびZ軸方向の位置が規制されている。光ファイバfは、ファイバ固定具126に固定された状態でファイバ保持台125に取り付けられ、位置規制部1252により先端側部分の位置が規制されることで、その軸心をX軸方向に向けてファイバ保持台125に取り付けられている。
【0025】
ファイバ移動ユニット12よりもX側には、フレーム11に固定されたブラケット19が設けられている。このブラケット19には、Y軸方向に延在する支柱191が固定されている。また、その支柱191には静電気発生装置13が固定されている。つまり、静電気発生装置13は、支柱191とブラケット19とを介してフレーム11に固定されることで、光学接続部品製造装置10内の位置が固定されている。静電気発生装置13は、ファイバ移動ユニット12に取り付けられた光ファイバfに電荷を付与するものである。すなわち、静電気発生装置13は、ファイバ移動ユニット12に取り付けられた光ファイバfを帯電させるものであり本発明における帯電手段の一例に相当する。この静電気発生装置13の上端部分には、セラミックスなどの誘電体の内部に電極が埋め込まれた板状の電極シート131が設けられている。電極シート131とファイバ移動ユニット12に取り付けられた光ファイバfとは高さ方向(Z軸方向)に0.1〜0.2mmの隙間が設けられている。電極シート131の電極に電圧が印加されると、光ファイバfは、電極シート131とは非接触状態を保ったまま帯電し静電気を帯びる。光ファイバfと電極シート131との非接触状態が保たれているので、光ファイバfに接触による傷が付くことはない。なお、静電気発生装置13の代わりに、コロナ放電などを利用して光ファイバfを帯電させる帯電手段を用いても良い。
【0026】
また、ブラケット19には、図示しないアームを介してファイバ検出装置14が取り付けられている。このファイバ検出装置14は、光ファイバfの先端面f1を検出するセンサである。ファイバ保持台125に取り付けられた光ファイバfは、移動ステージ122のX軸方向の移動に伴ってX軸方向に移動する。ファイバ検出装置14は、そのX軸方向の移動により光ファイバfの先端面f1が所定の位置(ここでは、電極シート131の真上)に到達したことを検出するものである。
【0027】
屈折率整合液保持ユニット15は、回転基台151と、回転ステージ152と、Z軸調整ステージ153と、屈折率整合液20を保持する保持手段50とを備えている。回転基台151は、フレーム11に固定されている。この回転基台151には、回転ステージ152を回転させる回転モータ1511が組み付けられている。回転ステージ152は、回転基台151の上に回転可能に取り付けられている。回転モータ1511を駆動することで、回転ステージ152はZ軸方向の軸を回転中心軸にして回転する。
【0028】
Z軸調整ステージ153は、回転ステージ152に取り付けられている。このZ軸調整ステージ153には図示しない調整ネジが設けられている。その調整ネジを回すことで回転ステージ152に対するZ軸調整ステージ153のZ軸方向の位置が調整される。保持手段50は、Z軸調整ステージ153に固定されている。すなわち、保持手段50は、Z軸調整ステージ153を介して回転ステージ152に取り付けられており、回転ステージ152に対するZ軸方向の位置が調整自在になっている。このZ軸調整ステージ153は、ファイバ保持台125に取り付けれた光ファイバfの先端面f1と屈折率整合液保持ユニット15に保持された屈折率整合液20とのZ軸方向の相対的な位置を調整するためのものである。
【0029】
保持手段50は、Z軸調整ステージ153に固定されている。この保持手段50は、台座部51と、その台座部51から上方に突出した本体部52とが一体に形成された樹脂製のものである。本体部52の上側部分には、側方に広がった保持面521と、保持面521よりも上方に立ち上がった壁部522とが設けられている。この壁部522には、保持面521側の壁面522aに開口を有する貫通孔5221が設けられている。回転ステージ152が回転すると、回転ステージ152、Z軸調整ステージ153、およびディスペンサ16とともに保持手段50も回転する。図1には、保持手段50の保持面521が光ファイバf側(−X側)に向いた供給姿勢にある状態が示されている。
【0030】
ディスペンサ16は、ノズル161とシリンダ162とから構成されている。このシリンダ162内部には、屈折率整合液20が蓄えられている。シリンダ162は、図示しないコンプレッサに接続されており、コンプレッサからエアが供給されると、シリンダ162内部に蓄えられた屈折率整合液20をノズル161から吐出する。すなわち、本実施形態におけるディスペンサ16は、本発明における供給手段の一例に相当する。シリンダ162は、図示しないアームによってZ軸調整ステージ153に固定されている。
【0031】
図1に示すように、ノズル161は、壁部522に設けられた貫通孔5221に挿入されている。ノズル161の先端161aの位置は、壁部522における保持面521側の壁面522aの位置に一致している。後述するように、光ファイバfの先端面f1に屈折率整合液20を付着させた後、残った屈折率整合液20を拭き取る作業を行う場合がある。その作業の際、ノズル161の先端161aを拭き取らないと、その先端161aに残った屈折率整合液20が固化し、ノズル161から吐出される屈折率整合液20の吐出方向が変わってしまったり、ノズル161が詰まってしまう虞がある。ノズル161の先端161aを壁面522aに一致させることで、壁面522aに残った屈折率整合液20とノズル161の先端161aとを同時に拭き取ることが可能になり、拭き取り作業を簡略化できる。
【0032】
ノズル161から吐出された屈折率整合液20は、保持面521の上に供給され、その表面張力によって保持面521の上に保持される。屈折率整合液20は、揮発性を有する溶媒に屈折率整合体が溶解した溶液である。この屈折率整合液20は、液中の溶媒が揮発することで固化し、弾性を有するゲル状の屈折率整合体が残る。屈折率整合体は、光ファイバfの屈曲率に近似した屈曲率と、光ファイバfに対して適度な粘着性を有する材料である。本実施形態では、屈折率整合体として、耐環境性や接着性のよいアクリル系の高分子材料を用いているが、その他の高分子材料を用いてもよい。
【0033】
図2は、保持手段50とノズル161の一部を示す斜視図である。この図2では、図1と同様に供給姿勢にある保持手段50が示されている。
【0034】
台座部51には下端から上方に切り欠かれた切欠部511が設けられている。また、台座部51の側面にはネジ穴512が設けられている。図1に示すZ軸調整ステージ153に設けられた図示しない突条に切欠部511が嵌め合わせられることで、保持手段50はZ軸調整ステージ153に対して所定の位置に配置されている。また、ネジ穴512に図示しないネジを締め込むことで、保持手段50はZ軸調整ステージ153に固定されている。
【0035】
図2に示すように、本体部52の最も−X側部分には、X軸と直交する方向に延在する平面523が形成されている。本体部52に形成された保持面521は、側方に広がった水平面を成しており、平面視では略扇形をしている。なお、保持面521は、必ずしも水平面である必要はなく、傾斜していてもよく、凹凸を有していてもよい。ただし、水平面或いは略水平な面とすることで、保持面521の上に供給された屈折率整合液20が早期に一定の形状で安定しやすくなる。保持面521と平面523との境界部分には、鉛直方向に直交する方向、すなわち水平方向に直線状に延在する縁部5211が形成されている。本実施形態では、この縁部5211の延在方向はY軸方向と一致している。なお、縁部5211は、水平方向或いは略水平方向に延在していれば、円弧形状など直線形状以外の形状であってもよく、またY軸方向と一致していなくてもよい。壁部522は、保持面521における、縁部5211とは反対側(X側)に設けられている。
【0036】
ディスペンサ16は、ノズル161の先端161aから保持面521に沿って縁部5211に向かって屈折率整合液20を吐出することで保持面521に屈折率整合液20を供給する。屈折率整合液20を縁部5211に向けて吐出することで、屈折率整合液20を縁部5211まで早期に確実に到達させることができる。ディスペンサ16によって、保持面521の上に供給された屈折率整合液20の表面は、保持面521の上を側方に向かって広がっていく。そして、縁部5211に達した屈折率整合液20は、その表面張力によって縁部5211の上に略円弧状に盛り上がっていく。ディスペンサ16は、屈折率整合液20の表面張力によって屈折率整合液20が縁部5211の上に盛り上がるまで屈折率整合液20を供給し、縁部5211から屈折率整合液20が垂れ落ちる前に供給を停止する。なお、図1には、屈折率整合液20が縁部5211の上に盛り上がり、ディスペンサ16が屈折率整合液20の供給を停止した状態を示されている。
【0037】
近接位置にある光ファイバfは、X軸方向を軸心として延在し、供給姿勢にある保持手段50の縁部5211はY軸方向に延在している。すなわち、本実施形態における縁部5211は、近接位置にある光ファイバfの軸心と直交する方向に延在する構成になっている。この構成により、近接位置にある光ファイバfの先端面f1が光ファイバfの湾曲癖などによって縁部5211の延在方向(Y軸方向)にずれてしまった場合でも、光ファイバfと屈折率整合液20との間の距離は殆ど変化せずに一定に保たれる。この距離が一定に保たれることで、光ファイバfを帯電させて屈折率整合液20を光ファイバfの先端面f1に吸着させた際に、光ファイバfの先端面f1に吸着する屈折率整合液20の量を一定量にすることができる。また、ファイバ移動ユニット12のY軸調整ステージ124によるY軸方向の位置調整を厳密に行う必要がなくなり、調整作業が容易になる。なお、縁部5211は、近接位置にある光ファイバfの軸心と完全に直交させる必要はないが、直交に近いほど、近接位置にある光ファイバfがY軸方向にずれてしまった場合でも、光ファイバfと屈折率整合液20との距離の変化を小さくすることができる。従って、屈折率整合液20を光ファイバfの先端面f1に吸着させる際には、近接位置にある光ファイバfの軸心に対して、直交あるいは略直交する方向に縁部5211を延在させることが好ましい。
【0038】
図3は、本発明の光学接続部品製造装置10の回路構成を表すブロック図である。
【0039】
制御部18は、X軸モータ制御回路183、回転モータ制御回路184、静電気発生装置制御回路185、ディスペンサ制御回路186、操作部187およびファイバ検出装置14それぞれに接続されている。また、制御部18は、内部にCPU(中央演算処理装置)181とメモリ182とタイマ189とを備えている。このメモリ182には、光学接続部品製造装置10の動作プログラムが記憶されている。CPU181は、メモリ182に記憶された動作プログラムを読み出し、その動作プログラムに従って各制御回路に指令を出すものである。
【0040】
X軸モータ制御回路183は、制御部18からの指令に従いX軸モータ1212の動作を制御する回路である。回転モータ制御回路184は、制御部18からの指令に従い回転モータ1511の動作を制御する回路である。静電気発生装置制御回路185は、制御部18からの指令に従い静電気発生装置13の電極に電圧を印加する回路である。ディスペンサ制御回路186は、ディスペンサ16に接続されたコンプレッサの動作を制御することでディスペンサ16から吐出される屈折率整合液20の吐出量を制御する回路である。また、操作部187には、光学接続部品製造装置10の操作者による操作を受け付ける各種のボタンが設けられている。
【0041】
続いて、光学接続部品製造装置10の動作を説明する。
【0042】
図4は、本実施形態の光学接続部品製造装置10の動作を表すフローチャートである。
【0043】
光学接続部品製造装置10の電源が投入されると、CPU181はメモリ182から動作プログラムを読み出して初期処理を行う(ステップS1)。この初期処理では、制御部18は、X軸モータ制御回路183および回転モータ制御回路184に指令を出し、X軸モータ1212および回転モータ1511を動作させる。
【0044】
図5は、初期処理が完了した状態の光学接続部品製造装置10を示す側面図である。
【0045】
初期処理が完了した状態では、移動ステージ122は、屈折率整合液保持ユニット15から離間した離間位置で停止している。また、回転ステージ152は、図1に示す状態からZ軸を回転中心軸として90度回転し、ノズル161の先端161aが、図5における手前側、すなわち光学接続部品製造装置10の操作者側に向いた清掃姿勢で停止している。なお、この清掃姿勢では、縁部5211も図5における手前側に位置している。この初期処理の後、光学接続部品製造装置10の操作者は、光ファイバfの長さや太さなどに応じて、近接位置にある光ファイバfと供給姿勢にある保持面521とが所定の位置関係になるように各調整ステージ123、124、153の位置を調整する。
【0046】
次に、制御部18は、光学接続部品製造装置10の操作者が操作部187に設けられた動作開始ボタンを押すまで待機する(ステップS2)。動作開始ボタンが押されたら(ステップS2でYES)、制御部18は、回転モータ制御回路184に指令を出し、縁部5211が保持手段50の−X側端部に位置し、縁部5211の延在方向がY軸方向に一致する供給姿勢になるまで回転モータ1511を駆動する(ステップS3)。
【0047】
その後、制御部18は、ディスペンサ制御回路186に指令を出し、表面張力によって縁部5211の上に屈折率整合液20が盛り上がる量の屈折率整合液20をディスペンサ16から供給する(ステップS4)。さらに、ディスペンサ16からの屈折率整合液20の供給を開始した時点で、制御部18は、タイマ189を動作させて時間の測定を開始する。この本実施形態では、ディスペンサ16から屈折率整合液20の供給を開始した時点でタイマ189による時間の測定を開始したが、供給終了時点でタイマ189による時間の測定を開始してもよい。なお、この屈折率整合液20の供給量は、あらかじめ光学接続部品製造装置10の操作者が試験的にディスペンサ16からの供給を行って縁部5211の上に屈折率整合液20が盛り上がる量を求め、操作部187を用いて指定した量である。
【0048】
また、動作開始ボタンが押されたら(ステップS2でYES)、制御部18は、回転モータ制御回路184に指令を出すのと同時に、X軸モータ制御回路183にも指令を出し、移動ステージ122のX側への移動を開始させる(ステップS5)。ファイバ検出装置14は、光ファイバfの先端面f1が電極シート131の真上に到達したか否かを検出し、到達したら制御部18に到達信号を送信する(ステップS6)。制御部18は、ファイバ検出装置14からの到達信号を受信したら、その受信したときからさらに移動ステージ122を所定距離移動させる。この移動により、光ファイバfの先端面f1は、屈折率整合液保持ユニット15に保持されている屈折率整合液20に接近した近接位置に配置される(ステップS7)。図1には、光ファイバfが近接位置にある状態、すなわちステップS7が完了した状態が示されている。図1に示すように、静電気発生装置13が固定された位置は、供給姿勢にある保持手段50の縁部5211からX軸方向に所定距離(ここでは第1の距離L1)だけ離れた位置である。また、近接位置にある光ファイバfの先端面f1の位置は、供給姿勢にある保持手段50の縁部5211から一定の距離(ここでは第2の距離L2)だけ離れた位置にある。従って、光ファイバfの先端面f1と静電気発生装置13とのX軸方向の間隔は、第1の距離L1と第2の距離L2によって定まる第3の距離L3になる。すなわち、本実施形態の構成では、縁部5211からX軸方向に第1の距離L1だけ離れた近接位置に光ファイバfの先端面f1を移動させることで、光学接続部品製造装置10を複数回動作させる場合、光ファイバfの先端面f1と静電気発生装置13とのX軸方向の距離L3は、再現性よく毎回一定になる。この距離L3が一定になると、光ファイバfの先端面f1の帯電量が一定になり、その結果、光ファイバfの先端面f1に吸着する屈折率整合液20の量を一定量にすることができる。静電気発生装置13を移動ステージ122に設け、光ファイバfと一緒に移動させる構成では、光ファイバfを移動ステージ122に取り付ける際に、光ファイバfの先端面f1を静電気発生装置13に対して厳密に位置合わせしないと、光ファイバfを取り付ける度に光ファイバfの先端面f1と静電気発生装置13との相対位置がずれてしまう。この相対位置がずれると、光ファイバfの先端面f1の帯電量が一定にならず、光ファイバfの先端面f1に吸着する屈折率整合液20の吸着量が一定量にならない。本実施形態のように、静電気発生装置13を固定配置し、光ファイバfを移動させる構成にすることで、光ファイバfを移動ステージ122に取り付ける際の位置合わせを厳密に行なわなくても、上記第3の距離L3を一定にすることができる。なお、静電気発生装置13を、移動ステージ122とは別の移動台に取り付け、屈折率整合液20を光ファイバfの先端面f1に吸着させる際に、供給姿勢にある保持手段50の縁部5211からX軸方向に第1の距離だけ離れた位置にその移動台の移動によって配置する構成としてもよい。
【0049】
続いて、制御部18は、タイマ189が動作してからあらかじめ定めた時間が経過したか監視し、あらかじめ定めた時間が経過するまで待機する。このあらかじめ定めた時間は、ディスペンサ16が保持面521に屈折率整合液20を供給してから、屈折率整合液20の溶媒が揮発することで屈折率整合液20における屈折率整合体の濃度が所望の濃度に達するまでに必要な時間である。所望の濃度に達するまでに必要な時間は、光学接続部品製造装置10の操作者が試験的に求め、操作部187を用いて指定した量である。なお、単位時間あたりの揮発量が分かっている場合には、その揮発量に基づいて所望の濃度に達するまでに必要な時間を求めてもよい。屈折率整合体の濃度が低すぎると、光ファイバfの先端面f1に付着する屈折率整合液20の付着量が少なくなってしまう虞がある。また、屈折率整合体の濃度が低すぎると、光ファイバfの先端面f1から光ファイバfの周面(側面)に屈折率整合液20が回り込んでしまう虞もある。逆に屈折率整合体の濃度が高すぎると、光ファイバfの先端面f1に付着する屈折率整合液20の付着量が多くなりすぎる虞がある。また、屈折率整合体の濃度が高すぎると、後述するS10の処理において光ファイバfの先端面f1に付着した屈折率整合液20と、保持面521の上にある屈折率整合液20とを分断しにくくなり、所謂糸引き現象が発生する虞もある。糸引き現象が発生すると、光ファイバfの先端面f1に吸着する屈折率整合液20の量や形状が安定し難くなる。本実施形態では、屈折率整合液20における屈折率整合体の濃度が所望の濃度に達したときに光ファイバfを帯電させることで、所望量の屈折率整合液20を光ファイバfの先端面f1のみに吸着させることができる。なお、S3の処理に必要な時間と上記あらかじめ定めた時間の合計時間は、S5〜S7の処理に必要な時間よりも長い時間である。これに対し、仮にS5〜S7の処理に必要な時間の方が長い場合は、S4の処理開始時間を遅延時間分遅らせてS3の処理に必要な時間と遅延時間と上記あらかじめ定めた時間の合計時間をS5〜S7の処理に必要な時間よりも長くすればよい。
【0050】
あらかじめ定めた時間が経過したら(ステップS8でYES)、制御部18は、静電気発生装置制御回路185に指令を出し、静電気発生装置13の電極シート131に電圧を印加する。電圧を印加することで、光ファイバfは帯電して先端面f1に屈折率整合液20が吸着する。そして、所定時間(ここでは1秒間)経過したら電圧の印加を停止させる(ステップS9)。上述したように、電圧を印加した時点では、移動ステージ122の移動(ステップS7の処理)は完了しており、光ファイバfは近接位置まで移動しているので、光ファイバfが近接位置にある状態で帯電は開始される。光ファイバfを帯電させながら近接位置に向かって移動させた場合、光ファイバfの先端面f1に屈折率整合液20が吸着し始めるタイミングが不明であり、またそのタイミングも環境温度や湿度によって異なってしまう虞がある。光ファイバfの先端面f1に吸着する屈折率整合液20の量は、吸着し始めてから帯電を完了する間の時間によって変化する。このため、そのタイミングが不明であると、屈折率整合液20が光ファイバfの先端面f1に吸着する量も不明になってしまう。また、そのタイミングが異なると、屈折率整合液20が光ファイバfの先端面f1に吸着する量は一定量にならない。本実施形態では、光ファイバfを近接位置に移動させてから光ファイバfを帯電させるので、光ファイバfの先端面f1に屈折率整合液20が吸着し始めるタイミングが一定になり、光ファイバfの先端面f1に吸着する屈折率整合液20の量を所望の一定量にすることができる。
【0051】
図6は、屈折率整合液20が光ファイバfの先端面f1に吸着した様子を示す図である。なお、図6では、光ファイバf、ファイバ載置部材1261の一部、静電気発生装置13の一部、屈折率整合液保持ユニット15の一部、および保持面521に保持された屈折率整合液20を示し、その他の構成については省略している。
【0052】
図6に示すように、光ファイバfが帯電して静電気を帯びると、その静電気によるクーロン力によって、屈折率整合液20の、縁部5211の上に盛り上がった部分が、光ファイバfの先端面f1に吸着する。上述したように、本実施形態の光学接続部品製造装置10では、ファイバ検出装置14が光ファイバfの先端面f1を検出した位置を基準として移動ステージ122を所定距離移動させる。従って、光学接続部品製造装置10を複数回動作させて複数の光学接続部品を製造する場合でも、光ファイバfが帯電する際の光ファイバfの先端面f1と静電気発生装置13との距離は一定である。この距離を一定にすることで、先端面f1の帯電量は常に一定になり、先端面f1に吸着する屈折率整合液20の量を再現性よく一定量にすることができる。
【0053】
電極シート131による電圧の印加を停止させた後、制御部18は、X軸モータ制御回路183に指令を出し、移動ステージ122を−X側に移動させる(ステップS10)。これにより、先端面f1に屈折率整合液20が付着した光ファイバfが得られる。ところで、電圧を印加したまま移動ステージ122を−X側に移動した場合、光ファイバfの先端面f1と保持面521の上それぞれに表面張力により付着した屈折率整合液20が分断しにくくなり、糸引き現象が発生する虞がある。本実施形態では、電圧の印加を停止した後に移動ステージ122を−X側に移動させて光ファイバfと保持手段50とを離間する構成としている。この構成により、光ファイバfの先端面f1と保持面521の上それぞれに付着した屈折率整合液20を分断しやすくなり、糸引き現象の発生が抑制される。糸引き現象の発生を抑制することで、光ファイバfの先端面f1に付着する屈折率整合液20の量や形状を一定にすることができる。また、移動ステージ122を−X側に移動させる速度が遅い場合も、糸引き現象が発生する虞がある。本実施形態では、移動ステージ122を−X側に移動させる速度を3mm/sec以上にしている。なお、糸引き現象の発生をより確実に抑制するために、移動ステージ122を−X側に移動させる速度は、5mm/sec以上にすることがより好ましい。
【0054】
屈折率整合液20は、その液中の溶媒が揮発することで固化し、弾性を有するゲル状の屈折率整合体になる。この屈折率整合体が光ファイバfの先端面f1に付着した部品が光学接続部品である。なお、溶媒の揮発は、通常環境下でも起こるが、揮発を促進するために強制乾燥させてもよい。
【0055】
最後に、制御部18は、回転モータ制御回路184に指令を出し、ノズル161の先端161aが図1における手前側になる清掃姿勢になるまで回転モータ1511を駆動し(ステップS11)、一連の処理を終了する。
【0056】
光学接続部品製造装置10の使用者は、保持面521の上に残った屈折率整合液20を拭き取る作業を行う。また、光学接続部品製造装置10の使用者は、先端面f1に屈折率整合液20が付着した光ファイバfをファイバ固定具126とともに光学接続部品製造装置10から取り外す。そして、新たな光ファイバfをファイバ固定具126に固定し、そのファイバ固定具126を光学接続部品製造装置10に取り付ける。その後、操作部187に設けられた動作開始ボタンを押すことで、ステップS3以降の処理が行われる。これらの動作を繰り返し行うことで、所望個数の光学接続部品が製造できる。
【0057】
以上説明したように、本実施形態の光学接続部品製造装置10および光学接続部品製造方法によれば、屈折率整合液20における屈折率整合体の濃度が所望の濃度に達したときに光ファイバfを帯電させることで、所望量の屈折率整合液20を光ファイバfの先端面f1のみに吸着させることができる。また、糸引き現象も抑制することができる。光ファイバfの先端面f1に所望量の屈折率整合液20を吸着させることで、その屈折率整合液20の溶媒を揮発させた屈折率整合体の量を所望の量にすることができる。これにより、所望量の屈折率整合体が光ファイバfの先端面に付着した品質の高い光学接続部品を得ることができる。
【0058】
本発明は上述の実施の形態に限られることなく特許請求の範囲に記載した範囲で種々の変更を行うことが出来る。例えば、本実施形態では、光ファイバfを屈折率整合液20側に移動させる構成としたが、光ファイバfを移動させずに、屈折率整合液保持ユニット15を移動させることで屈折率整合液20を光ファイバf側に移動する構成としてもよい。また、光ファイバfと屈折率整合液20の両方を移動する構成としてもよい。また、本実施形態では、光ファイバfを、その軸心方向であるX軸方向に移動させることで近接位置に移動させる構成としたが、その他の方向に移動させることで近接位置に移動させる構成としてもよく、Z軸方向の軸あるいはY軸方向の軸を回転中心軸として回転させることで近接位置に移動させる構成としてもよい。また、本実施形態では、光学部材として光ファイバfを用いたが、ロッドレンズなどの他の光学部材を用いてもよく、光学部材以外のガラス、セラミックス、プラスチックなどの線状の誘電体を用いてもよい。さらに、本実施形態では、屈折率整合液20を光ファイバfの先端面f1に吸着させたが、屈折率整合液20以外の液状の高分子材料を用いて線状の誘電体の先端面に高分子材料被膜を形成してもよい。また、本実施形態では、保持面521に屈折率整合液20を供給してから光ファイバfを移動させて近接位置に配置したが、光ファイバfを近接位置まで移動させてから保持面521に屈折率整合液20を供給してもよい。
【0059】
なお、以上説明した各変形例の記載それぞれにのみ含まれている構成要件であっても、その構成要件を他の変形例に適用してもよい。
【符号の説明】
【0060】
10 光学接続部品製造装置
13 静電気発生装置
16 ディスペンサ
20 屈折率整合液
50 保持手段
122 移動ステージ
161 ノズル
521 保持面
522 壁部
1211 移動機構
1212 X軸モータ
5211 縁部
5221 貫通孔
f 光ファイバ
【特許請求の範囲】
【請求項1】
線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持する保持手段と、
前記保持手段に前記屈折率整合液を供給する供給手段と、
前記保持手段に供給された前記屈折率整合液を前記光学部材の先端面に吸着させるために該光学部材を帯電させる帯電手段とを備え、
前記帯電手段は、前記供給手段が前記保持手段に前記屈折率整合液を供給してから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させるものであることを特徴とする光学接続部品製造装置。
【請求項2】
前記帯電手段により帯電した前記光学部材の先端面に帯電によるクーロン力によって、前記保持手段に保持された前記屈折率整合液が吸着する近接位置まで、前記保持手段および前記光学部材のうち少なくとも一方を移動させる移動手段を備え、
前記帯電手段は、前記保持手段および前記光学部材のうち少なくとも一方を前記移動手段が前記近接位置まで移動させてから該光学部材を帯電させるものであることを特徴とする請求項1に記載の光学接続部品製造装置。
【請求項3】
前記移動手段は、前記帯電手段が前記光学部材への帯電を停止してから、前記保持手段と該光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させるものであることを特徴とする請求項2に記載の光学接続部品製造装置。
【請求項4】
線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持手段に保持させる保持工程と、
前記保持手段に前記屈折率整合液を供給する供給工程と、
前記保持手段に供給された前記屈折率整合液を前記光学部材の先端面に吸着させるために該光学部材を帯電させる帯電工程とを有し、
前記帯電工程は、前記供給工程によって前記保持手段に前記屈折率整合液が供給されてから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させる工程であることを特徴とする光学接続部品製造方法。
【請求項5】
前記保持工程で保持された前記屈折率整合液が、前記帯電工程により帯電した前記光学部材の先端面に帯電によるクーロン力によって吸着する近接位置まで、前記保持手段および前記光学部材のうち少なくとも一方を移動させる第1の移動工程を有し、
前記帯電工程は、前記保持手段および前記光学部材のうち少なくとも一方を前記近接位置まで移動させてから該光学部材を帯電させる工程であることを特徴とする光学接続部品製造方法。
【請求項6】
前記帯電工程における帯電を停止してから、前記保持手段と前記光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させる第2の移動工程を有することを特徴とする請求項5に記載の光学接続部品製造方法。
【請求項1】
線状の光学部材の先端面に屈折率整合体が付着した光学接続部品を製造する光学接続部品製造装置において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持する保持手段と、
前記保持手段に前記屈折率整合液を供給する供給手段と、
前記保持手段に供給された前記屈折率整合液を前記光学部材の先端面に吸着させるために該光学部材を帯電させる帯電手段とを備え、
前記帯電手段は、前記供給手段が前記保持手段に前記屈折率整合液を供給してから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させるものであることを特徴とする光学接続部品製造装置。
【請求項2】
前記帯電手段により帯電した前記光学部材の先端面に帯電によるクーロン力によって、前記保持手段に保持された前記屈折率整合液が吸着する近接位置まで、前記保持手段および前記光学部材のうち少なくとも一方を移動させる移動手段を備え、
前記帯電手段は、前記保持手段および前記光学部材のうち少なくとも一方を前記移動手段が前記近接位置まで移動させてから該光学部材を帯電させるものであることを特徴とする請求項1に記載の光学接続部品製造装置。
【請求項3】
前記移動手段は、前記帯電手段が前記光学部材への帯電を停止してから、前記保持手段と該光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させるものであることを特徴とする請求項2に記載の光学接続部品製造装置。
【請求項4】
線状の光学部材の先端面に屈折率整合体を付着させる光学接続部品製造方法において、
揮発性を有する溶媒に前記屈折率整合体が溶解した屈折率整合液を保持手段に保持させる保持工程と、
前記保持手段に前記屈折率整合液を供給する供給工程と、
前記保持手段に供給された前記屈折率整合液を前記光学部材の先端面に吸着させるために該光学部材を帯電させる帯電工程とを有し、
前記帯電工程は、前記供給工程によって前記保持手段に前記屈折率整合液が供給されてから、該屈折率整合液の溶媒が揮発することで該屈折率整合液における前記屈折率整合体の濃度が所望の濃度に達するまでに必要なあらかじめ定められた時間が経過したときに、前記光学部材を帯電させる工程であることを特徴とする光学接続部品製造方法。
【請求項5】
前記保持工程で保持された前記屈折率整合液が、前記帯電工程により帯電した前記光学部材の先端面に帯電によるクーロン力によって吸着する近接位置まで、前記保持手段および前記光学部材のうち少なくとも一方を移動させる第1の移動工程を有し、
前記帯電工程は、前記保持手段および前記光学部材のうち少なくとも一方を前記近接位置まで移動させてから該光学部材を帯電させる工程であることを特徴とする光学接続部品製造方法。
【請求項6】
前記帯電工程における帯電を停止してから、前記保持手段と前記光学部材が離間するように該保持手段および該光学部材のうち少なくとも一方を移動させる第2の移動工程を有することを特徴とする請求項5に記載の光学接続部品製造方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−54126(P2013−54126A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−190982(P2011−190982)
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000153591)株式会社巴川製紙所 (457)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000153591)株式会社巴川製紙所 (457)
【Fターム(参考)】
[ Back to top ]