
光学的情報読取装置
【目的】読取範囲の非常に大きな光学的情報読取装置を提供すること。小形、軽量、且低コストの合焦装置及び測距装置を実現すること。小形、軽量、且低コストの光学的情報読取装置を提供すること
【構成】この発明の光学的情報読取装置は、光源2と、合焦装置3と、振動ミラー形走査装置4と、受光光学系5と、光電変換器7と、信号処理部8と、測距装置6とで構成し、合焦装置3は、台焦レンズ31と、合焦レンズ位置検出手段32と、合焦レンズ移動手段33と、合焦レンズ位置サーボ回路34とで構成する。合焦レンズ位置サーボ回路34は、合焦レンズ位置検出手段32からの位置検出信号と測距装置6からの距離測定信号とが一致した時に、合焦レンズ移動手段33を停止させるものである。
【構成】この発明の光学的情報読取装置は、光源2と、合焦装置3と、振動ミラー形走査装置4と、受光光学系5と、光電変換器7と、信号処理部8と、測距装置6とで構成し、合焦装置3は、台焦レンズ31と、合焦レンズ位置検出手段32と、合焦レンズ移動手段33と、合焦レンズ位置サーボ回路34とで構成する。合焦レンズ位置サーボ回路34は、合焦レンズ位置検出手段32からの位置検出信号と測距装置6からの距離測定信号とが一致した時に、合焦レンズ移動手段33を停止させるものである。
【発明の詳細な説明】
【技術分野】
【0001】
この出願の発明は、光ビームを用いて光学的情報を読み取るための光ビーム走査式光学的情報読取装置に関する。特に、近点から遠点まで、長深度に亙って、光学的情報を精密に読み取るための可変焦点形光ビーム走査式光学的情報読取装置に関する。
【背景技術】
【0002】
例えば物流分野では、一般に、固定スキャナとラベルとの距離が一定していない。
そのため、自動焦点形固定スキャナが賞用されている(1992年7月1日株式会社工業調査会発行、浅野恭右外1名編「これからのバーコードシステム」第203〜204頁参照)。
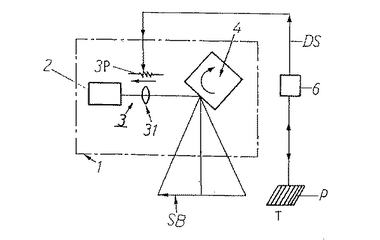
図18は、その種の従来の自動焦点形固定スキャナの動作原理図である。
その種の自動焦点形固定スキャナは、筐体1と、レーザ素子2と、収束光学系3と、ポリゴンミラー装置4と、受光光学系(図示しない。)と、距離計6とで構成されている。
レーザ素子2、収束光学系3、ポリゴンミラー装置4、及び受光光学系は、筐体1内に収納されている。
しかし、距離計6だけは、筐体1内に収納されず、外部に配設されている。
【0003】
収束光学系は、収束レンズ31、収束レンズ移動機構(図示しない。)、収束レンズ位置サーボ機構等で構成されている。サーボポテンショメータ3Pは、収束レンズ位置サーボ機構の一部である。
サーボポテンショメータ3Pの可動部は、レンズ移動機構に連結され、収束レンズ31やレンズ移動機構と共に、収束光学系の可動部を構成している。
距離計6からの距離信号DSは、サーボポテンショメータ3Pに与えられる。収束レンズ位置サーボ機構は、収束レンズ31の位置を調節して、その焦点をラベル表面に合致させる。
【0004】
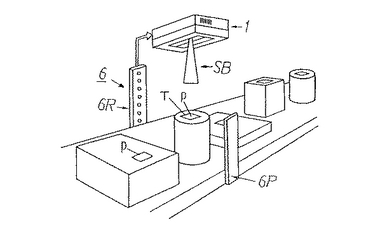
図19は、従来の自動焦点形固定スキャナを利用した物流仕分けシステムの一例を示す模式図である。
この種の従来例の距離計6は、測距用投光器6Pと測距用受光器6Rとで構成され、測距用受光器6Rは、図示の如く、垂直方向に配列された複数個の受光素子で構成され、測距用投光器6Pも同様に、垂直方向に配列された複数個の発光素子(図示しない)で構成されている。
バーコード記号pを付された各個の物品は、コンベアに載って、測距用投光器6Pと測距用受光器6Rとの間を通過する。
上記の距離計6は先ず、遮光を検知した受光素子の内、どれが最高位の受光素子かを判別することによって、コンベア上の物体の高さhXを検知することが出来る。
固定スキャナの高さHSは既知であるから、固定スキャナとバーコード記号pとの間の距離DXは、次式によって、算出することが出来る。
DX=HS−hX (1)
その余の動作は、図14のそれと同様である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
図19の自動焦点形固定スキャナに使用されている距離計6は、測距用投光器6Pと被読取物Tと測距用受光器6Rとが一直線上にあるようにするため、占有体積が大きくなるから、本質的に小形化が困難である。その上、測距用投光器6Pと測距用受光器6Rとは、本質的に固定式であるから、光ビーム走査形の手持式スキャナに搭載することは、不可能である。
(ついでながら、産業分野を異にするテレビカメラの分野においては、空間周波数成分の変動を利用した合焦装置(詳説すれば、焦点整合がとれた時は映像信号(空間周波数信号)中の高調波成分が増大し、焦点整合から外れた時は減少するという現象を利用した合焦装置)が利用されているが、手持式スキャナに搭載するには、構成が複雑で、大形である。) 図18の収束光学系3中の可動部は、前述の如く、収束レンズ31や収束レンズ移動機構の外部に、それらと結合したサーボポテンショメータ3Pの可動部を含有するから、その分、質量が大となる。従って、その分移動速度が遅くなるから、読取距離を急変させた場合は、これに追従することが困難となる。
又、構成が複雑であり、一層の小形化が困難である。
【0006】
それ故、この出願の発明の第1の目的は、被読取物が遠点にあったり近点にあったりして読取距離が一定しない時でも、光学的情報を正確に読み取ることが出来る、超長読取深度の光学的情報読取装置を提供することにある。別言すれば、読取範囲の非常に大きな光学的情報読取装置を提供することにある。
この出願の発明の第2の目的は、小形、軽量、且低コストの合焦装置及び測距装置を実現することによって、全体としても小形、軽量、且低コストの光学的情報読取装置を提供することにある。
この出願の発明の第3の目的は、小形、軽量、且低コストの合焦装置及び測距装置を搭載した、手持式光学的情報読取装置を提供することにある。
【0007】
この出願の発明の第4の目的は、可変絞り装置を付加することによって、近点においては解像度の上り過ぎを防止し、遠点においてはその下がり過ぎを防止し、以って超長深度に亙って解像度を適正値に維持することが出来る、光学的情報読取装置を提供することにある。
この出願の発明の第5の目的は、光源の光量を、距離信号及び/又は走査角信号に基づいて、制御することによって、受光光量を適正値に維持することが出来る、光学的情報読取装置を提供することにある。
この出願の発明の第6の目的は、温度変化に起因する、構成部材の形状、寸法、物性の変化に基づく、装置全体の特性の変化を補償することにある。
この出願の発明の第7の目的は、前面に走査ミラー、後面に受光ミラーを有する振動ミラー形走査装置を使用することによって、即ち後面の受光ミラーを受光専用に利用することによって、受光口径を大きくし、従って受光光量を大きくすることが出来る、光学的情報読取装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の諸問題を解決し、且上記の諸目的を達成するために、この出願の発明による光学的情報読取装置は、 被読取物Tを走査する光ビームを発出する光源2と、 光源2から発出した光ビームを被読取物T上に合焦させる合焦装置3と、 上記光ビームを、水平面内において、周期的に反射偏向させる振動ミラー形走査装置4と、 被読取物Tから反射して来た反射光を所定の位置に集光する受光光学系5と、 受光光学系5の後段に配設され、上記反射光を電気的アナログ信号に変換する光電変換器7と、 光電変換器7の出力端子に接続された信号処理部8と、 振動ミラー形走査装置4から被読取物Tまでの距離を測長する測距装置6と、 これらの要素の全部又は一部を収納する筐体1と で構成し、 測距装置6と合焦装置3とは、測距装置6からの距離信号を、合焦装置3に対して位置指令信号として与えるように、接続したものである。
【0009】
上記の合焦装置3は、合焦レンズ31と、合焦レンズ位置検出手段32と、合焦レンズ移動手段33と、合焦レンズ位置サーボ回路34とで構成される。合焦レンズ位置検出手段32は、サーボポテンショメータ等の機械的手段を使用せず、合焦レンズ位置検出用ポジションレンズ32PLと合焦レンズ位置検出用受光器32PS等の光学的手段を使用して構成したものである。合焦装置3には、可変絞り装置10を付加することが出来る。
上記の振動ミラー形走査装置4は、振動ミラー41と駆動手段とを一体的に構成したものを使用することが出来る。
上記の測距装置6は、測距専用の投光器を使用せず、測距用受光レンズと測距用光電変換器と演算回路とで構成したものである。
光源2には、振動ミラー形走査装置4と被読取物Tとの間の距離変動に起因する受光光量の変動を補償する自動輝度制御装置を付加することが出来る。
合焦装置3、可変絞り装置10、自動光源輝度制御装置には、温度補償装置を付加することが出来る。
【発明の効果】
【0010】
光源2から発出した光ビームは、振動走査形ミラー装置4によって、周期的に反射偏向せしめられ、被読取物T上を反復的に走査せしめられる。
被読取物Tからの反射光は、受光光学系5を経由して、光電変換器7に至り、電気的アナログ信号に変換される。電気的アナログ信号は、信号処理部8以下においてディジタル信号に変換され、光学的情報が解読される。
測距装置6は、測距用受光レンズ6Lと測距用光電変換器6Sと測距用演算回路6Cとを使用し、被読取物Tからの走査光由来の反射光のみを利用して、振動ミラー形走査装置4から被読取物Tまでの距離を直接的に測定して、距離測定信号を出力する。測距装置6は、測距専用の投光器を使用せず、又、測距用演算回路6Cも簡単であるから、小形且軽量となる。
【0011】
合焦装置3の合焦レンズ位置検出手段32は、例えば光ビームの1走査周期中に合焦レンズ31の位置を検出し、合焦レンズ位置サーボ回路34に対して、合焦レンズ位置検出信号を、与える。
合焦装置3の合焦レンズ位置サーボ回路34は、測距装置6からの距離測定信号に基づく合焦レンズ位置指令信号と台焦レンズ位置検出手段32との差が零になった時、一定所望の出力電流を、合焦レンズ移動手段33に与える。
合焦装置3の合焦レンズ移動手段33は、合焦レンズ位置サーボ回路34からの差信号に基づいて台焦レンズ31を光軸に沿って移動させることによって、走査用光ビームの焦点を、近点から遠点まで、超長深度に亙って、移動させることが出来る。光ビームの焦点は、被読取物Tと合致せしめられる。
合焦装置3は、サーボポテンショメータ等の機械的手段を用いていないから、小形軽量となる。
【0012】
可変絞り装置10は、被読取物Tが近点にある時(従って、合焦レンズを近点に合焦させた時)には、可変絞りIの開口口径を相対的に小さくし、可変絞り出射時の光ビーム径2のωdを相対的に小さくすることによって、近点におけるビームウエスト径を相対的に太くすると共に、近点の前後におけるビーム径2ωZCの急激な変化を防止する。これによって、可変絞り装置10は、光ビームの近点合焦時におけるビームウエスト径2ωOCの細くなり過ぎと、近点前後のビーム径2ωZCの急激な増加とを防止し、S/N比の減少を防止することが出来る。
又、可変絞り装置10は、被読取物Tが遠点にある時(従って、合焦レンズを遠点に合焦させた時)には、可変絞りIの開口口径を相対的に大きくし、可変絞り出射時の光ビーム径2ωdを相対的に大きくすることによって、遠点におけるビームウエスト径2ωOFを相対的に小さくする。これによって、可変絞り装置10は、光ビームの遠点合焦時におけるビームウエスト径2ωOFの太くなり過ぎを防止し、以ってS/N比の減少を防止することが出来る。
【発明を実施するための最良の形態】
【0013】
(第1の実施例) この出願の発明による光学的情報読取装置の第1の実施例について説明する。
先ず、その全体構成について、概括的に説明する。
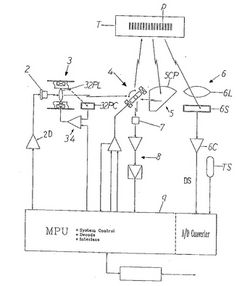
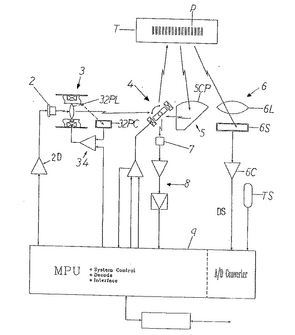
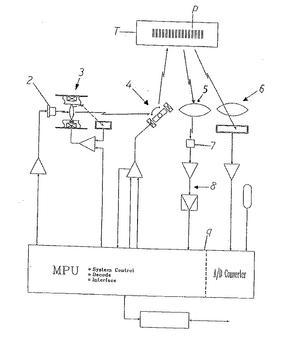
図1は、この出願の発明の第1の実施例の全体構成を示す図である。
図1において、2は光源(例えばレーザダイオード)、2Dは光源駆動回路、3は合焦装置、4は振動ミラー形走査装置、5は受光光学系、6は測距装置、7は光電変換器(受光器)、8は信号処理部、9は集中制御装置(例えばマイクロプロセッサユニット)、TSは温度センサ、Tは被読取物である。筐体1の記載は省略してある。
【0014】
上記の諸要累は、光源2から発出した光が、合焦装置3、振動ミラー形走査装置4の第1のミラー(走査用ミラー)411、被読取物T、受光光学系5の集光兼偏向手段5CP、及び振動ミラー形走査装置4の第2のミラー(受光ミラー)412を経由して、光電変換器(受光器)7に到達し得るように、配置される。光電変換器(受光器)7の出力端子には、信号処理部8が接続される。
測距装置6の測距用受光レンズ6Lは、振動ミラー形走査装置4の走査ミラー411から横方向に距離dだけ離隔した位置に配設される。
測距装置6は、走査ミラー411と被読取物Tとの間の距離(又は被読取物Tと測距用受光レンズ6Lとの間の距離)を測定して、距離信号DSを出力する。
合焦装置3は、上記の距離信号DSに基づいて合焦レンズ31を光軸方向に移動させ、従って光源2と合焦レンズ31との間隔を変化させて、焦点を被読取物T上に合致させる。
この間、温度センサTSの出力信号に基づいて、システム全体の温度特性が補償される。
又、光電変換器7(又は測距用光電変換器6S)の出力に基づいて、若しくは走査角信号に基づいて、光源2の輝度が制御される。
かくして、被読取物T上のバーコード記号pが読み取られる。
【0015】
次に、第1の実施例の部分構成及び部分動作について説明する。
(第1の実施例の合焦装置) 図2は、第1の実施例に使用する合焦装置3の動作原理図であり、図3は、同実施例に使用する合焦装置3の要部をなす光学的合焦ユニット3Uを示す図である。
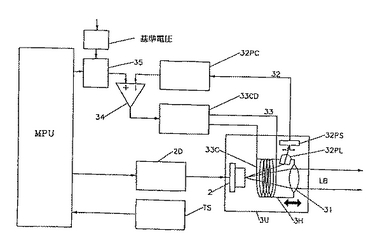
図2において、31は合焦レンズ、3Hは筒状の合焦レンズホルダ、32は合焦レンズ位置検出手段、33は合焦レンズ移動手段、34は合焦レンズ位置サーボ回路(エラー増幅器)、35は電子的分圧器である。
合焦レンズ31は、ガラス又は合成樹脂等の透明材料からなる。
合焦レンズ位置検出手段32は、合焦レンズ位置検出用ポジションレンズ32PLと合焦レンズ位置検出用光電変換器32PSと、合焦レンズ位置演算回路32PCとからなる。
【0016】
筒状の合焦レンズホルダ3Hには、その周壁を、例えば図示の如く、若干斜め方向に貫通する光の側路(即ち、径方向(ラジアル方向)よりも若干前方に傾いた方向に貫通する光の側路)が形成され、ここに合焦レンズ位置検出用ポジションレンズ32PLが埋め込まれる。
合焦レンズ位置検出用ポジションレンズ32PLによる集光点には、合焦レンズ位置検出用光電変換器32PSが配設され、合焦レンズ位置検出用光電変換器32PSの出力端子には合焦レンズ位置演算回路32PCが接続される。
合焦レンズ位置検出用光電変換器32PSの出力、即ち合焦レンズ位置検出手段32の出力は、合焦レンズ位置検出信号となる。合焦レンズ位置検出信号の大きさは、合焦レンズホルダ3Hの位置の関数であり、従って又、合焦レンズ31の位置の関数である。
【0017】
合焦レンズ移動手段33は、可動線輪駆動回路33CDと、可動線輪33C等からなる。可動線輪33Cは、合焦レンズホルダ3Hに連結される。
合焦レンズ位置サーボ回路(エラー増幅器)34は、例えば演算増幅器を用いて構成され、+端子への入力電圧と−端子への帰還電圧との合成電圧が略零の状態で、一定所望の出力電流となる。
合焦レンズ位置サーボ回路34の+端子には、測距装置6から直接、又は集中制御装置(例えばマイクロプロセッサユニット)9を介して、合焦レンズ位置指令信号が与えられる。又、−端子には、合焦レンズ位置検出用光電変換器32PSから、合焦レンズ位置演算回路32PCを介して、合焦レンズ位置検出信号が与えられる。(電子的分圧器35については後述する。) 合焦レンズ位置サーボ回路34の出力(電流)は、可動線輪駆動回路33CDに与えられ、可動線輪駆動回路33CDの出力(電流)は、可動線輪33Cに与えられる。
合焦レンズ位置指令信号と合焦レンズ位置検出信号との差の信号が零になった時、可動線輪33Cは停止(静止)する。
【0018】
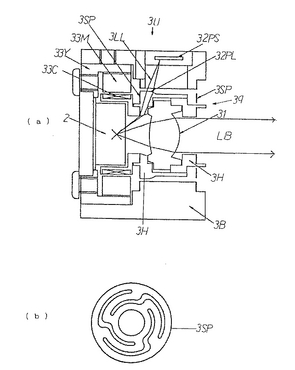
図3(a)は、第1の実施例に使用する合焦装置3の要部をなす光学的合焦ユニット3Uの縦断面図であり、同図(b)は、これに使用する支持バネ3SPの正面図、同図(c)は、合焦レンズ位置検出用受光器の動作原理図である。
図3(a)において、2は光源(例えばレーザ)、31は合焦レンズ、3Hは合焦レンズホルダ、3SP,3SPは1対の支持バネ、3Bは鏡筒(バレル)、32PLは合焦レンズ位置検出用ポジションレンズ、32PSは合焦レンズ位置検出用受光器、33Cは可動線輪、33Mは永久磁石、33Yは継鉄(ヨーク)である。
【0019】
合焦レンズ31は合焦レンズホルダ3Hによって保持され、合焦レンズホルダ3Hは1対の支持バネ3SP,3SPによって支持・挟持され、両支持バネ3SP,3SPは、例えば、鏡筒3Bの内周壁に設けた段部によって、それぞれ固定される。
合焦レンズホルダ3H及び1対の支持バネ3SP,3SPは、共同して、合焦レンズ支持手段39を構成する。
支持バネ3SPは、例えば図3(b)の如く、外側リング、内側リング、両リングを連結する数本の連結部(例えば3本の連結部)とで、構成される。支持バネ3SPのバネ作用は、例えば3本の連結部によって、担持される。各連結部には、所要のバネ力に応じて、適宜の長さが与えられる。
合焦レンズホルダ3Hは、1対の支持バネ3SP,3SPによって挟持されているから、完全に光軸方向にのみ移動可能となる。従って、合焦レンズ31も完全に光軸方向にのみ移動可能となる。
【0020】
環状の可動線輪33Cは、合焦レンズホルダ3Hの光源側に直列的に連結されている。
上記の諸要素のうち、合焦レンズ31、合焦レンズホルダ3H、合焦レンズ位置検出用ポジションレンズ32PL、及び可動線輪33Cは、共同して、可動部を構成する。
可動線輪33Cの外側には、環状の永久磁石33Mが同軸状に配設され、該環状の永久磁石33Mの外側には、略環状又は有孔皿状(以下、単に「環状」という。)の継鉄33Yが配設される。
略環状の継鉄33Yは、鏡筒3Bの内周壁に固定される。
【0021】
環状の永久磁石33Mは、例えば径方向(ラジアル方向)に着磁される。
継鉄33Yは、鉄その他の強磁性体製であるから、永久磁石33Mの磁束を可動部の可動線輪33Cへ効率よく導く。
可動線輪33Cは、通電により、軸方向に、正又は負の力を受ける。受ける力は、駆動電流の大きさと、駆動電流に交差する磁界の大きさとの積に比例する。
そのため、可動線輪33Cが軸方向に前進若しくは後退する。
即ち、可動線輪33Cに対して駆動電流を供給すると、合焦レンズ31は、駆動電流の正負に応じて、軸方向に前進若しくは後退することとなる。
【0022】
合焦レンズ位置検出用ポジションレンズ32PLは、可動部の一部をなす合焦レンズホルダ3Hの周壁に埋め込まれる。合焦レンズ位置検出用ボジションレンズ32PLの内側表面の位置は、合焦レンズ31よりも光源寄りにあり、その光軸は、図示の如く、合焦レンズホルダ3Hの径方向(ラジアル方向)よりも若干前方に傾斜させてある。(但し、傾斜の有無は本質的な事項ではない。) 合焦レンズ位置検出用ポジションレンズ32PLの光軸(の延長線)と交差する、鏡筒3Bの周壁部分には、図示の如く、貫通孔が穿設され、該鏡筒3Bの外周壁寄りに合焦レンズ位置検出用光電変換器32PSが配設される。
【0023】
鏡筒3Bの貫通孔の断面形状及び合焦レンズ位置検出用光電変換器32PSの受光面形状は何れも、縦長であって、それらの長手方向寸法は、合焦レンズ位置検出用ポジションレンズ32PLの移動範囲を完全にカバーするに足る大きさを有していなければならない。(しかし、合焦レンズ位置検出用光電変換器32PSが、合焦レンズ位置検出用ポジションレンズ32PLの移動方向(合焦レンズ31の光軸方向)と平行である必要はない。) 合焦レンズ位置検出用ポジションレンズ32PLの内側表面に到達したレーザ光(側部光)は、図3の合焦レンズ位置検出用レーザ光3LLの如く、合焦レンズホルダ3Hの外側に導出され、合焦レンズ位置検出用受光器32PSの受光面に入射せしめられる。合焦レンズ位置検出用ポジションレンズ32PLは、レーザ光3LLの集光点が合焦レンズ位置検出用光電変換器32PSの受光面と合致するように、設計される。
【0024】
上記の諸要素のうち、鏡筒3B、合焦レンズ位置検出用受光器32PS、永久磁石33M、及び継鉄(ヨーク)33Yは、共同して、固定部を構成する。
そして、上記の固定部と、前記の可動部と、前記の支持バネ3SPとは、共同して、光学的合焦ユニット3Uを構成する。
光源2は、この実施例では、図示の如く、鏡筒3Bの内部に、しかも可動線輪33Cの内方空間に配置され、継鉄(ヨーク)33Yによって支持される。
これによって、軸方向の寸法が縮小される。
【0025】
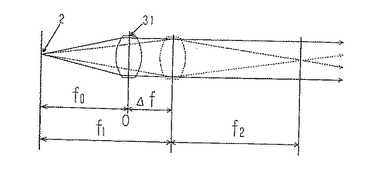
合焦レンズ31の位置と、合焦レンズ31による光の集光位置との関数関係について説明する。
図14は、合焦レンズ31による光の集光位置を示す図である。
焦点距離f0なる合焦レンズ31を、図示の如く、光源2から距離f0の位置に置いた場合、合焦レンズ31から出た光は、平行光となる。
そこでこの位置を、合焦レンズ31に関して、基準位置とすることが出来る。或は合焦レンズ31の光軸方向に即してx軸をとり、この位置を原点(x=0)とすることが出来る。
合焦レンズ31が基準位置(x=0)からΔfだけ反光源側(被読取物T側)に遠ざかると、レーザ光は合焦レンズからf2の位置(x=f2)に集光する。
【0026】
見易くするため、f0+Δf=f1とおくと、上記の関係は、レンズの公式
(1/f0)=(1/f1)+(1/f2) (1)
として、良く知られている。上式を変形すれば、次式が得られる。
f2=(1/Δf)f02+f0 (2)
即ち、f2は(1/Δf)に比例する。
合焦レンズ31から測距原点までの内部光路長をL、測距原点からバーコードまでの距離をDxとすれば、f2は次式によって与えられる。
f2=Dx+L (3)
式(2)、(3)から、次式が得られる。
Δf=f02/(f2−f0)=f02/(Dx+L−f0) (4)
式(4)のΔfは、距離信号Dxに基づく合焦レンズ位置指令信号と解することが出来る。かかるΔfを、以下、Δfcと書く。
【0027】
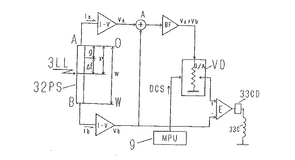
合焦レンズ位置検出用光電変換器32PS及び合焦レンズ位置制御回路34について説明する。
図15は、合焦レンズ位置検出用光電変換器32PSの側面図、及び合焦レンズ位置制御回路34のブロック図である。
図15において、32PSは合焦レンズ位置検出用光電変換器、34は合焦レンズ位置制御回路、33Cは可動線輪、33CDは可動線輪駆動回路、9は集中制御装置(例えばマイクロプロセッサユニット)である。
合焦レンズ位置検出用光電変換器32PSの動作特性は、以下の通りである。
合焦レンズ位置検出用光電変換器32PSは、その受光面にスポット光が到来すると、A端に電流Iaを、B端に電流Ibを発生する。電流Ia及びIbの大きさは、スポット光が当たった位置によって異なる。
合焦レンズ位置検出用光電変換器32PSの長手方向に沿ってx′軸をとり、A端を原点(x′=0)、B端をx′=Wとし、且簡単のためスポット光の強さが一定であるとすると、電流Ia,Ibの大きさはそれぞれ次の通りとなる。
Ia=p(W−x′),Ib=px′ (5)
但し、pは比例定数。
【0028】
合焦レンズ位置検出用光電変換器32PSは、図3(a)の如く、光学的合焦ユニット3Uの鏡筒3Bに固定されているから、移動しない。
これに対して、合焦レンズ位置検出用ポジションレンズ32PLは、前述の如く、光学的合焦ユニット3Uの可動部(例えば可動線輸33C)に連結されているから、合焦レンズ31の移動につれて移動する。
合焦レンズ位置検出用ポジションレンズ32PLは、図3(a)の如く、レーザ光源2の不要光(合焦レンズ31に入射しない側部光)を取り込み、且集光して、合焦レンズ位置検出用レーザ光3LLを形成する。その光点(または光条)は、合焦レンズ位置検出用光電変換器32PSの受光面に当てられる。
かくして、合焦レンズ位置検出用ポジションレンズ32PLにより集光された光点(または光条)は、合焦レンズ位置検出用光電変換器32PS上を、合焦レンズ31の移動につれて移動する。合焦レンズ31の移動距離をΔf、光点(または光条)の移動距離をΔf′とすれば、近似的に次式が成立する。
Δf′=aΔf (6)
但し、aは比例定数。
上記の比例定数aは、図3(a)から明らかな如く、略1に近い値である。
【0029】
いま、Δf=0(従ってx=0)のとき、x′=gとする。
即ち、合焦レンズ31が基準位置(x=0)にあるとき、合焦レンズ位置検出用ポジションレンズ32PLにより集光された合焦レンズ位置検出用レーザ光3LLの光点が、合焦レンズ位置検出用光電変換器32PS上に当たる点(位置)を、x′=gとする。
そして、x=Δfのとき、x′=g+Δf′とする。
即ち、合焦レンズ31が基準位置からΔfだけ被読取物T側に移動したとき、合焦レンズ位置検出用ポジションレンズ32PLにより集光された合焦レンズ位置検出用レーザ光3LLの光点が、合焦レンズ位置検出用光電変換器32PS上に当たる点(位置)を、図3(a)の如く、x′=g+Δf′とする。
そうすると、式(5)、(6)に基づいて、次式が得られる。
Ib/(Ia+Ib)=x′/W=(Δf′+g)/W =(aΔf+g)/W (7)
但し、Wは合焦レンズ位置検出用光電変換器32PSの全受光幅。
この式は、入射光量が変化しても成立する。
【0030】
式(7)を変形すれば、次式となる。
Δf=〔{WIb/(Ia+Ib)}−g〕/a (8)
式(8)によるΔfは、合焦レンズ位置測定信号である。この場合のΔfを、以下、Δfmと書く。
原理的には、式(4)による合焦レンズ位置指令信号Δfcと、式(8)による合焦レンズ位置測定信号Δfmとを、図2の合焦レンズ位置サーボ回路34中の差動増幅器(エラー増幅器)の各入力端子に印加することが可能である。
合焦動作が開始すると、Δfが増大し、従ってΔfmが増大するが、ΔfmがΔfcと一致した所で、合焦レンズ31が停止する。そして、合焦動作が終了する。
【0031】
図15に戻って、電子的分圧器35及びエラー増幅器E(即ち合焦レンズ位置サーボ回路34)について説明する。
A端からの電流信号Ia、及びB端からの電流信号Ibは、それぞれ電圧信号に変換され、Va,Vbとなる。
A端からの電圧信号Vaは加算器Aに印加され、B端からの電圧信号Vbは加算器A、及びエラー増幅器Eの−に印加される。
加算器Aでは、和信号Va+Vbが作られる。
和信号Va+Vbは、電子的分圧器VDの第1の入力端子に印加される。
式(7)は、電圧信号Va、Vb並びにVa+Vbを用いて、次のように、書き換えられる。
Vb/(Va+Vb)=(aΔfc+g)/W (9)
Vb=(Va+Vb)(aΔfc+g)/W (10)
式(10)は、入射光量が変化しても成立する。
中央制御装置(例えばマイクロプロセッサユニット)9は、分圧制御信号DCSを、電子的分圧器VDの第2の入力端子に送る。
分圧制御信号DCSによる分圧比は、(aΔfc+g)/Wである。
電子的分圧器VDは、和信号Va+Vbに、分圧比(aΔfc+g)/Wを乗じた値を出力する。
【0032】
電子的分圧器VDの出力と、実際のVbとを、エラー増幅器E(即ち合焦レンズ位置サーボ回路34)に入力し、その出力を可動線輪33Cに印加する。
合焦動作が開始すると、Δfの増大につれてΔf′が増大し、従って、実際のVbが増大するが、Vbが(Va+Vb)(aΔfc+g)/Wと合致した所で、合焦レンズ31が停止する。そして、合焦動作が終了する。
かくして、合焦レンズ31を、中央制御装置(例えばマイクロプロセッサユニット)9が指令した位置(x=Δfc)に、保持する事ができる。
式(4)、(8)に基づく合焦動作(図2参照)と、式(10)に基づく合焦動作(図15)は、本質的に等価である。但し、演算回数は後者の方が少なくて済む。
図15の電子的分圧器VDには、デジタルアナログコンバータA/Dや、E2POT(サイコーネー)等が利用できる。
合焦レンズ位置検出のための専用光源は、必要でない。
【0033】
(第1の実施例の測距装置) 第1の実施例に使用する第1の測距装置について説明する。
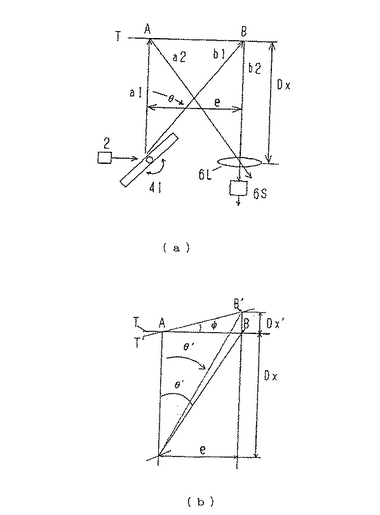
図4は、同実施例に使用する第1の測距装置の原理説明図である。
図4(a)において、2は光源、41は振動ミラー、Tは被読取物、6Lは測距用受光レンズ、6sは小径の測距用光電変換素子、a,は振動ミラー41の走査中心線(即ち読取方向中心線)、b2は測距用受光レンズ6Lの受光中心線である。
測距専用の投光光源は、必要としない。
【0034】
説明の便のため、
走査中心線a1と受光中心線b2との間の距離をe、
振動ミラー41と被読取物Tとの間の距離(又は測距用受光レンズ6Lと被読取物Tとの間の距離)をDx、
走査中心線a1と被読取物Tとの交点をA、
受光中心線b2と被読取物Tとの交点をB、
点Aから測距用受光レンズ6Lに向かう反射光線をa2、
振動ミラー41から点Bに向かう光線をb1、
振動ミラー41の中心点から線分ABを見込む角(走査中心線a1と点Bに向かう光線b1とのなす角=振り角)をθ
とする。
簡単のため、走査中心線a1と被読取物Tとは直交している(即ち読取中心線a1と被読取物Tとは直交している)ものとする。
eの値は所与であるから、振り角θが計測可能ならば、被読取物Tまでの距離DXは、次式で与えられる。
DX=e/tanθ (11)
【0035】
さて、測距用光電変換素子6sは小径であるから、受光中心線b2から外れて到来する光線(例えば点Aから到来する光線a2)は、図示の如く、測距用光電変換素子6sから外れることとなり、受光されない。
従って、測距用光電変換素子6sで受光される光線は、受光中心線b2に沿って到来する光線のみである。
走査ビームが点Aを通過する時点tAは、走査用同期信号に基づいて決定することが出来る。走査ビームが点Bを通過する時点tBは、測距用光電変換素子6sの出力が極大になる時点であるから、出力極大時点を検知することによって、検知することが出来る。出力極大時点の検出には、公知の手段が使用される。
【0036】
時点tAと時点tBとの時間差をtdとすれば、振動ミラー41の中心点から線分ABを見込む角(振り角)θは、時間差tdに比例する。即ち、
θ=ktd (12) 但し、kは走査速度によって決まる比例定数。
従って、被読取物Tまでの距離Dxは、次式によって与えられる。
DX=e/tan(ktd)=e cot(ktd) (13)
図4(b)は、図4(a)における被読取物Tを、点Aを中心として、反時計方向に角ψだけ、回転させた場合を示す。破線T′は、被読取物の回転後の現在位置を示す。
角ψの回転によって誤差DX′が生じる。DX′は次式によって与えられる。
DX′=e tanψ (14)
角ψ(ラディアン)が微小であれば、DX′≒eψ≒0であるから、焦点整合に支障を来す虞(おそれ)はない。
【0037】
(第1の実施例の振動ミラー形走査装置) 第1の実施例に使用する振動ミラー形走査装置4について説明する。
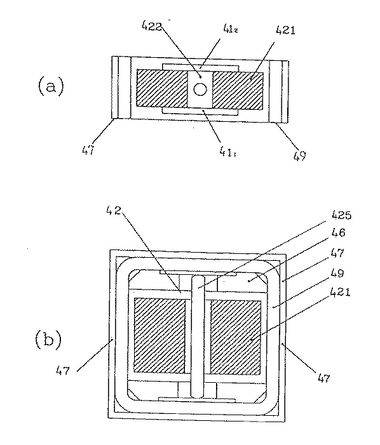
図6(a)及び(b)は、同振動ミラー形走査装置の水平断面図及び垂直断面図である。
図6(a)及び(b)において、411は第1の反射ミラー(走査用ミラー)、412は第2の反射ミラー(受光用ミラー)、42は可動部、46はホルダ、47は固定継鉄(ヨーク)、49は駆動巻線である。
可動部42は、可動部本体と回転軸425とを含有し、可動部本体は、板状、棒状又は立体状であって、2個の可動磁石421、421と、可動継鉄422とを含有する。
第1の反射ミラー411と可動部本体と第2の反射ミラー412とは、一体的に構成する。
【0038】
駆動巻線49が通電されていない時は、可動体は図示の位置に静止する。
可動体を静止位置から適宜の角度回動させて釈放すると、可動磁石421と継鉄47との間に吸引力(磁気バネ力)が発生するから、可動体42は、自由往復振動を開始する。
駆動巻線49が通電された時は、駆動電流が可動磁石421の磁界と交差するから、可動磁石421に正又は負の偶力が作用する。その結果、可動体42は強制振動を開始する。
第1の反射ミラー411は、合焦装置2から到来した光ビームを、周期的に反射偏向させる。第2の反射ミラー412は、被読取物T上の飛点(光の移動点)から集光兼偏向手段5CPを経由して到来する反射光を、周期的に反射偏向させて、光電変換器7に向けて射出する。
集光兼偏向手段5CPは、集光レンズと反射プリズムとを、図示の如く、一体に構成したもので良いし、集光レンズと反射プリズムとを互いに別体として構成したものでも良い。
(尚、上記の振動ミラー形走査装置4については、この発明の出願人の出願に係る特願平6−87157号の明細書及び図面に詳細に説明されている。)
【0039】
(第1の実施例の受光光学系) 第1の実施例に使用される受光光学系5について説明する。
図1に戻って、5CPは集光兼偏向手段であって、集光作用と偏向作用とを兼ね備えたものである。
集光兼偏向手段5CPと第2の反射ミラー422(図6(a)参照)とは、共同して、受光光学系5を構成する。
集光兼偏向手段5CPは、被読取物T上の飛点(光の移動点)から到来する反射光を集光すると共に、集光した反射光の進行方向を変換して、第2の反射ミラー412に向けて射出する。第2の反射ミラー412は、到来した反射光を、周期的に反射偏向させて、光電変換器7に入射させる。
この実施例では、集光兼偏向手段5CPの受光口径を拡大することによって、受光光量を増加することが出来る。
【0040】
(第1の実施例の光源) 図1において、2は光源である。光源2としては、例えば、可視光ビームを発光する可視光半導体レーザ、又は、面発光形構造のLEDに極小径のメサ構造を用いたものを使用する。
光源2には、集光レンズを組み込むことが出来る。但し、該集光レンズは、前記の側部光を保存するものでなければならない。
【0041】
(第1の実施例の光源駆動回路) 第1の実施例の光源駆動回路について説明する。
光源2からの投光は、ビーム状光束であるので、バーコードと走査装置の距離が変化してもバーコードに入射する光パワーは変化しない。受光レンズに入射するバーコード面上からの反射光は、その距離により変化し、受光口径が一定の場合、受光光量はバーコードからの距離の2乗に反比例する。
測距により得られた距離データをもとに、投光光出力を制御すると、バーコードからの距離が変化しても受光量を一定に保つ事ができる。(但し、最大出射出力は、光放射安全規格等により制限される事がありる。)
【0042】
図17は、光源駆動回路2Dのブロック図である。この図は、光源にレーザダイオードを用いた場合である。
レーザダイオードLDから発光した光の一部は、光出力を観測する為のモニタ用ホトダイオードMPDに入射する。モニタ用ホトダイオードMPDは、レーザダイオードLDの発光出力に比例したモニタ電流を発生する。モニタ電流は抵抗Rで電圧信号ECに変換され、エラー増幅器Eの−端子に入力される。
エラー増幅器Eの+端子には、光出力制御電圧LPCSが入力される。
このモニター電圧ECは、エラー増幅器Eで光出力制御電圧LPCSと比較され、同一電圧となる様、レーザの発光出力が制御される。
上記の光出力制御電圧LPCSは、例えば集中制御装置(例えばマイクロプロセッサユニット)9から送出された光出力制御信号(論理値)が、DAコンバータD/Aによってアナログ量に変換されてなるものである。
【0043】
(第1の実施例の温度補償装置)
図1において、TSは温度センサである。温度センサTSの温度測定信号を用いて、合焦装置3及び光源駆動回路2Dの温度補償を行うことが出来る。
温度センサTSとしては、温度特性が既知な感温素子(例えばサーミスタ、ダイオードなど)が利用できる。
サーミスタは、温度によって抵抗値が変化する素子であるから、その抵抗値を抵抗電圧変換回路により電圧値に変換し、その電圧値をA/Dコンバータでディジタル信号に変換してから、集中制御装置(例えばマイクロプロセッサユニット)9に入力する。
合焦装置3の合焦レンズ位置サーボ回路34に対して、例えば温度測定信号に比例する信号を加算(減算)することが出来る。これによって、温度変動に伴う焦点の変動を防止することが出来る。その結果、合焦レンズとして、プラスチック製レンズの使用が可能となる。
又、光源駆動回路2Dに対して、例えば温度測定信号に比例する別の信号を加算(減算)することが出来る。これによって、受光光量に対する温度変動の影響が除去される。
【0044】
(第2の実施例)
この出願の発明による光学的情報読取装置の第2の実施例について説明する。
第2の実施例は、第1の実施例に可変絞り装置を付加したものに相当する。
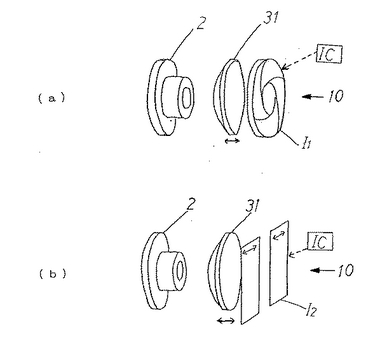
図7(a)は、第2の実施例に使用する第1の可変絞り装置の動作原理図である。
図7(a)において、2は光源、31は合焦レンズ、I1は可変円形絞り、ICは絞り制御回路である。
上記の可変円形絞りI1と、絞り制御回路ICと、図示しない円形絞り駆動機構とは、共同して、第1の可変絞り装置10を構成する。
可変円形絞りI1及び円形絞り駆動機構の構造と機能は、例えばカメラの分野において公知のものと同様である。可変円形絞りI1の開口(アパーチャ)形状は、開口口径が変化しても変化せず、常に円形である。
絞り制御回路ICは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受けて、絞り制御信号に変換し、円形絞り駆動機構に印加する。
円形絞り駆動機構は、絞り制御信号に基づいて、可変円形絞りI1の開口口径を調節する。
回動調節後の可変円形絞りI1の開口口径は、距離信号の1次関数となる。
【0045】
図7(b)は、第2の実施例に使用する第2の可変絞り装置の動作原理図である。
図7(b)において、2は光源、31は合焦レンズ、I2は可変平行四辺形絞り、ICは可変平行四辺形絞り制御回路である。
上記の可変平行四辺形絞りI2と、絞り制御回路ICと、図示しない平行四辺形絞り駆動機構とで、第2の可変絞り装置10を構成する。
可変平行四辺形絞りI2及び平行四辺形絞り駆動機構の構造と機能は、例えばカメラの分野において公知のものと同様である。可変平行四辺形絞りI2の開口は、横幅(短辺長)だけが変化する。
絞り制御回路ICは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受けて、絞り指令信号に変換し、平行四辺形絞り駆動機構に印加する。平行四辺形絞り駆動機構は、絞り指令信号に基づいて、可変平行四辺形絞りI2の開口の横幅(短辺長)だけを調節する。
回動調節後の可変円形絞りI2の開口口径は、距離信号の1次関数となる。
【0046】
可変絞り装置の有用性について、更に詳細に説明する。
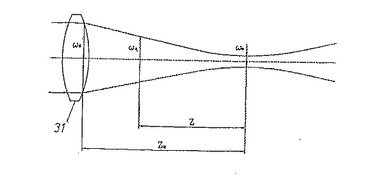
図9は、合焦レンズ通過後のレーザビームの縦断面図である。但し、レーザ光はガウシアン分布を有するものとする。
図9において、31は合焦レンズであり、ωdは合焦レンズ31の出射点におけるレーザビームの半径(=合焦レンズの半径)、ωOはビームウエスト半径、ZOは合焦レンズ31の出射点からビームウエスト位置までの距離である。
このとき、ビームウエスト半径ωO及び直径2ωOは、次式で表わされる。
ωO= λZO/(πωd) (15)
2ωo=2λZO/(πωd) (15′) 但し、λはレーザ光の波長。
【0047】
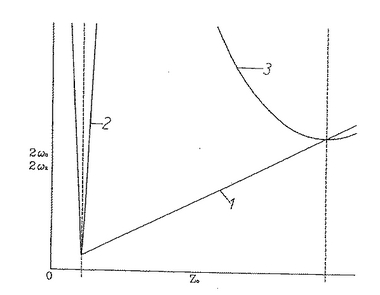
いま、合焦レンズ31の出射点におけるレーザビームの半径ωdも一定、波長λも一定であるとすると、ビームウエスト半径ωo(及び直径2ωO)は、ビームウエスト距離ZOの1次関数となる。
式(15′)をグラフ化すれば、図10の直線1の通りとなる。
但し、図10には、便宜上、三つの座標系を記載してあるから、曲線1は、距離ZOを横軸、ビームウエスト直径2ωOを縦軸をとする座標系(ZO−2ωO座標系)上の直線であることに注意されたい。
図10の直線1から明らかなように、ビームウエスト位置が遠点ZOFにあるときは、ビームウエスト径2ωOFは太く、ビームウエスト位置が近点ZOCにあるときは、ビーム径2ωOCは細い。
【0048】
ビームウエスト半径ωOは、式(8)から明らかなように、レーザ光源の波長λ、レンズの口径(2ωd)、及びビームウエスト位置ZOの選定で決まる。
一般には、所定の遠点ZOFに自動合焦した時に、ビームウエスト半径ωOが、所望の値ωOFとなる様に、ωdを選択する。
そうすると、近点ZOCに自動合焦した時には、ビームウエスト径2ωOCは、図10の直線1から明らかなように、所望のビームウエスト径よりも大分小さく(細く)なって仕舞う。即ち、(ZOF/ZOC)の1になって仕舞う。その結果、近点ZOCにおける光学解像度が必要以上に上り過ぎて、読取データ以外のソイズ(紙面よごれ、印刷むら等)までも検出して仕舞い、信号のS/Nを悪化させて仕舞う虞がある。
【0049】
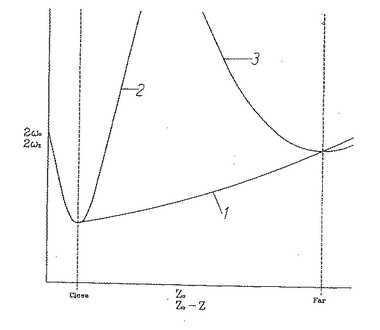
しかしながら、第2の実施例では、合焦レンズ31の前位又は後位に、図7の如く、可変絞りIを配設したから、合焦レンズ31を近点ZOCに合焦するときには、並行して可変絞りIをも自動的に調節し、ωdを小さくすることによって、ビームウエスト半径ωOCを大きくし、以って上記のS/N比の悪化を防止することが出来る。
図11は、可変絞り通過後のレーザビームのウエスト位置及び直径を示すグラフであるが、同図の曲線2の極小値、即ち合焦レンズ31を近点ZOCに合焦した時のビームウエスト径2ωOCは、図10の曲線2のそれに比べて、遥かに大きく(太く)なっており、所望の値(要求値)2ωOFに近付いていることが解る。
【0050】
図9に戻って、ωZはビームウエスト位置から距離Z離れた点におけるレーザビームの半径である。
上記のレーザビームの半径ωZ及び直径2ωZは、次式で与えられる。
ωZ2 = ωO2{1+(λ/(πωO2))2Z2} (16)
(2ωZ)2=4ωO2{1+(λ/(πωO2))2Z2} (16′)
ビームウエストが任意の近点ZOCにある場合について、式(9′)をグラフ化すれば、図10の曲線2の通りとなる。図10には、前述の如く、便宜上三つの座標系を記載してあるのであるが、曲線2は、近点ZOCを原点とし、近点ZOCからの距離Zを横軸とし、レーザビーム直径2ωZを縦軸をとする座標系(即ち、Z−2ωZ座標系)上の曲線である。
【0051】
又、ビームウエストが任意の遠点ZOFにある場合について、式(16′)をグラフ化すれば、図10の曲線3の通りとなる。曲線3は、遠点ZOFを原点とし、遠点ZOFからの距離Zを横軸とし、レーザビーム直径2ωZを縦軸とする座標系(即ちZ−2ωZ座標系)上の直線である。
(ついでながら、レーザビームの直径2ωZを、合焦レンズ31の出射点を原点とする空間座標zの関数として表現したいときは、式(16′)にに対して、例えば、次式を代入すれば良い。
(ビームウエストが近点ZOCにあるとき) Z=z−ZOC (17)
(ビームウエストが遠点ZOFにあるとき) Z=z−ZOF (17′)
但し、z=0(原点)は合焦レンズ31の出射点、z=ZOCは近点、z=ZOFは遠点である。)
【0052】
図10の曲線2から明らかなように、合焦レンズを近点ZOCに自動合焦した時は、ビーム径2ωZが近点ZOCの前後で急激に増大する(太くなる)ため、自動焦点制御の精度向上が必要となる。しかしながら、合焦レンズ31から被読取物までの距離z(ZOC+Z)は、走査ビームの偏向につれて速い周期で変化し、又被読取物面が湾曲しているときにも同様に速い周期で変化するから、こうした変化に自動焦点制御動作を追従させることは困難である。そのため光学解像度が変化し易い。
【0053】
しかしながら、第2の実施例では、前述の如く、合焦レンズ31の前位又は後位に、図7の如く、可変絞りIを配設したから、合焦レンズ31を近点ZOCに合焦するときは、並行して可変絞りIをも自動的に調節し、ωdを小さくすることによってビームウエスト半径ωOCを相対的に大きく(太く)するから、式(9)及び(9′)の各右辺の中括弧{}内における変数Z2の係数
(λ/(πωOC2))2
が小さくなり、従って近点ZOCの前後でのωZ2の変化が緩慢となり、ビーム半径ωZの変化(立上り)も緩慢になる。
図11によれば、曲線2の曲率が、図10の曲線2のそれに比べて、遥かに小さくなっていることが解る。
以上要するに、第2の実施例では、自動合焦装置の使用に伴って近点におけるビームウエスト径が細くなり過ぎる事態を回避すると共に、ビーム走査や被読取物表面の湾曲に起因する光路長の変化に基づく光学解像度の変化を、軽減することが出来る。
第2の実施例のその余の事項は、第1の実施例と同様である。
【0054】
(第3の実施例)
この出願の発明による光学的情報読取装置の第3の実施例について説明する。
第3の実施例は、第1の実施例における合焦装置を下記のものに置換すると共に下記の可変絞り装置を付加したものに相当する。
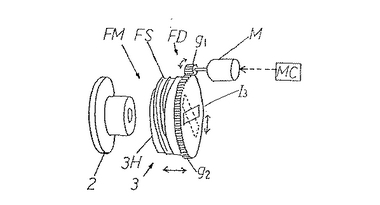
図8は,第3の実施例に使用する合焦装置3及び可変絞り装置の動作原理図である。
図8において、2は光源、3Hは円筒形合焦レンズホルダ、FSは送りねじ、g1は第1の歯車、g2は第2の歯車、Mは電動モータ、33は合焦レンズ位置移動手段、I3は可回転長方形絞り、MCは合焦レンズ位置制御回路兼長方形絞り回動角制御回路である。
【0055】
送りネジFSは、円筒形合焦レンズホルダ3Hの外周面に雄ネジとして形成され、図示しない鏡筒3Bの内周面に形成した雌ネジに螺合される。(或は、この関係を逆にして、合焦レンズホルダ3H側に雌ネジを、鏡筒3B側に雄ネジを形成するようにしても良い。)両ネジは、共同して、送り機構FMを構成する。
第1の歯車g1は、回転軸を介して電動モータMに速結され、第2の歯車g2は、円筒形合焦レンズホルダ3Hの一端面(又は外周面)に対して同軸的に結合される。第2の歯車g2には光ビームを通過させるための貫通孔が穿設される。両歯車g1、g2は、共同して、歯車機構(g1,g2)を構成する。
(第2の歯車g2と円筒形合焦レンズホルダ3Hとは一体又は別体に構成することができる。)
【0056】
送りねじ機構FMと、歯車機構(g1,g2)と、電動モータMと、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCとは、共同して、合焦レンズ位置移動手段33を構成する。
合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受信し、合焦レンズ位置指令信号兼長方形絞り回動角指令信号に変換して、電動モータMに印加する。
合焦レンズ位置制御指令信号兼長方形絞り回動角制御信号は、距離信号の1次関数となる。
電動モータMは合焦レンズ位置制御信号に従って回動する。電動モータMの回動運動は、歯車機構(g1,g2)を介して、円筒形合焦レンズホルダ3Hに伝達され、送り機構FMによって、軸方向の直線運動に変換される。
移動調節後の合焦レンズ31の位置は、距離信号の1次関数となる。
(歯車機構(g1,g2)の歯数比と、送りねじFSのピッチとは、距離信号の比例係数に反映される。)
【0057】
可回動長方形絞りI3は、回動可能な板体からなり、中心部に長方形の開口を有する。可回動長方形絞りI3は、第2の歯車g2又は合焦レンズホルダ3Hに対して、同心的に結合される。(三者は、一体又は別体に構成される)。
可回動長方形絞りI3と、歯車機構(g1,g2)と、電動モータMと、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCとは、共同して、可回動長方形絞り装置10を構成する。
半導体レーザ光源からの光ビームは断面形状が元もと縦長であるから、可回動長方形絞りI3への入射光ビームの断面形状寸法を、可回動長方形絞りI3の開口形状寸法と同程度にすることができる。
【0058】
このとき、回動転長方形絞りI3を通過してなる光ビームの断面形状寸法は、可回動長方形絞りI3の回転角度に依存し、長方形の開口が水平の時に最小、垂直の時に最大となる。即ち、可回動長方形絞りI3を通過した光ビームの断面形状は、光ビーム断面と開口断面との共通部分(重なり合った部分)からなる形状と同一である。
可回動長方形絞りI3は、歯車機構(g1,g2)に連結されているから、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCからのレンズ位置制御信号兼長方形絞り回動角制御信号に従って回動する。
回動調節後の長方形開口の位置(角度)は、距離信号の1次関数となる。
(歯車機構(g1,g2)の歯数比は、距離信号の比例定数に反映される。) 第3の実施例に使用する可変絞り装置の有用性は、第2の実施例におけるそれと同様である。
第3の実施例のその余の事項は、第1の実施例と同様である。
【0059】
(第4の実施例)
この出願の発明による光学的情報読取装置の第4の実施例について説明する。
第4の実施例は、第1の実施例における振動ミラー形走査装置と受光光学系とを下記のもので置換してなるものに相当する。
図12中には、第4の実施例の全体構成を示す図である。
図12において、4は振動ミラー形走査装置、5は受光光学系である。
その余の要素2〜3、6〜9は、図1の要素と同様である。
【0060】
(第4の実施例の振動ミラー形走査装置)
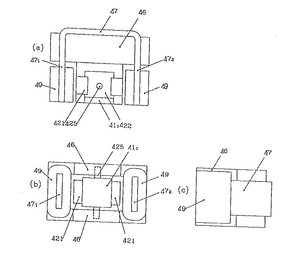
図3は、第4の実施例に使用する振動ミラー形走査装置を示す図で、(a)は水平断面図、(b)は正面図、(c)は側面図である。
図13において、411は反射ミラー、42は可動部、46はホルダ、47は固定継鉄、49は駆動巻線である。
第1の実施例に対する、第4の実施例の、構成の差違について説明する。
固定継鉄47の形状は、略コの字形である。略コの字形は、略口の字形の一辺を削除してなる形状である。
固定継鉄7の一対の対辺〜471,472は、典型的には直線状であるが、緩やかな曲線状とすることも出来る。
【0061】
可動部42は、可動部本体と回動軸425とを含有する。
可動部本体は、固定継鉄47の1対の対辺471,472の間に、且前面寄り(開放端寄り)に配設される。
可動部本体と固定継鉄47とは、略口の字形の磁気回路を構成する。
回動軸425は、固定継鉄47を含む平面に対して、垂直に配設される。
駆動巻線49,49はそれぞれ、固定継鉄47の1対の対辺471,472の前面寄りに巻回される。
唯一の反射ミラー(走査用ミラー)411は可動部42の前面に固定される。
第4の実施例のその余の構成は、第1の実施例と同一である。
【0062】
(第4の実施例の受光光学系)
第4の実施例に使用する受光光学系について、説明する。
図12に戻って、受光光学系5は、ありきたりの集光レンズからなる。
集光レンズ5を通過した反射光は、直接無媒介的に光電変換器7に入射する。
第4の実施例のその余の事項は、第1の実施例と同様である。
【0063】
(第5の実施例)
この出願の発明による光学的情報読取装置の第5の実施例について説明する。
第5の実施例は、第4の実施例における受光光学系5を、合焦装置3の近傍に移動させると共に、振動ミラー形走査装置の反射ミラーを、受光用ミラーとしても利用する様にしたものに相当する。
第5の実施例は、第1〜第4の実施例に比べて、受光光量が若干減少する。
第5の実施例のその余の事項は、第4の実施例と同様である。
【0064】
(第6の実施例)
この出願の発明の第6の実施例について説明する。
この出願の発明の第6の実施例は、第1の実施例における測距装置を下記の測距装置で置換したものに相当する。
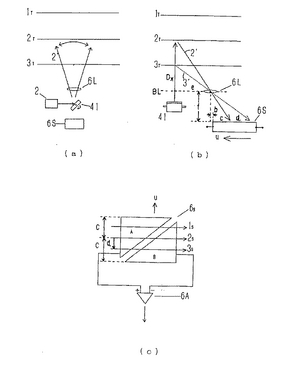
図5は、この出願の発明の第6の実施例に使用する測距装置6の原理説明図であって、同図(a)はその平面図(装置の上方から見た図)、同図(b)はその側面図(装置の側方から見た図)、同図(C)は同測距装置6に使用する測距用光電変換器6Sとその接続関係を示す図である。
【0065】
図5(a)〜(c)において、2は光学情報読取用光源、41は振動ミラー、6Lは測距用受光レンズ、6Sは測距用光電変換器、6Aは差動増幅器である。
測距用光電変換器6Sに付された符号uは、測距用光電変換器6Sの上方向を示す。
符号1T,2T,及び3Tは,被読取物T(図示しない。)の代表的な位置を示し、符号1S,2S,及び3Sは、これらの位置に対応する、反射光からなる走査線(飛点の軌跡)の位置を示す。
被読取物Tが2Tから3Tに移動すると(即ち、近付くと)、反射光からなる走査線の軌跡は、2Sから3Sに移動する(即ち、下方に移動する)。このことは、図5(b)を参照することによって、容易に理解することが出来る。
反対に、被読取物Tが2Tから1Tに移動すると(遠ざかると)、走査線の軌跡は、2Sから1Sに移動する(上方に移動する)。このことも、同様にして、理解することが出来る。
【0066】
測距用光電変換器6Sは、二つの受光領域A及びBからなる。受光領域A及びBの形状は、図5(C)の如く、正方形乃至長方形を1本の斜線によって2等分してなる形状である。正方形乃至長方形を対角線に沿って分割した場合は、領域A及びBの形状は直角3角形、そうでない場合は、台形となる。
二つの領域A及びBは、電気的に絶縁されている。両領域の光電流出力IA、IBは、走査線(飛点)が表面を通過する時間(距離)に比例する。
測距用光電変換器6Sの上下方向の長さを2c、中心から走査線の軌跡までの距離をd(−c≦d≦c)とすると、走査線(飛点)が領域Aを通過する時間は(c−d)に比例し、領域Bを通過する時間は(c+d)に比例するから、
IA=p(c−d)
IB=p(c+d)
となる。
【0067】
但し、pは比例定数(光の強度に依存する)である。
一方の領域Aは、差動増幅器6Aの+端子に接続され、他方の領域Bは、差動増幅器6Aの−端子に接続される。出力端子には差電圧信号VXが得られる。
VX=−2Apd (18)
但し、Aは差動増幅器6Aの利得。
走査線が図5(c)の線2S上を通過するときは、領域Aの出力VAと領域Bの出力VBとが同一となるから、差動増幅器6Aの出力VXは、ゼロとなる。
走査線が線3S上を通過するとき(被読取物Tが近点寄りにあるとき)は、領域Aの出力VAが領域Bの出力VBよりも小となるから、差動増幅器6Aの出力VXは、負の値となる。
走査線が線1S上を通過するとき(被読取物Tが遠点寄りにあるとき)は、領域Aの出力VAが領域Bの出力VBよりも大となるから、差動増幅器6Aの出力VXは、正の値となる。
このとき、dの符号が負となって、d=−|d|となる。
上式を書き換えれば、次式が得られる。
d=−VX/2Ap (18′)
【0068】
三角測量の理論を利用するため、測距用受光レンズ6Sを横切る基線BLを考える(図5(b)参照)。そして、基線BL(測距用受光レンズ6L)から被読取物Tまでの距離をDX、走査中心線から測距用受光レンズ6Lまでの基線BL上の距離をe、基線BL(測距用受光レンズ6L)から測距用光電変換器6Sのまでの距離をf、測距用受光レンズ6Lの光軸から測距用光電変換器6Sの一端(u側端部)までの距離をbとする。
受光光量が略一定値に制御されているときは、被読取物Tまでの距離DXは、次式によって与えられる。
DX=ef/(b+c−VX/2Ap) (19)
【0069】
上記の式(19)の導出過程は、下記の通りである。
図5(b)によれば、高さがDXで底辺がeなる直角三角形と、高さがfで底辺が(b+c+d)なる直角三角形を考えることが出来る。両者は、その斜辺が1個同一の線分3′上にあるから、明らかに相似である。相似の理論によれば、
DX/e=f/(b+c+d)
∴DX=ef/(b+c+d) (20)
式(20)に、式(18′)を代入すると、前記の式(19)が得られる。
測距用光電変換器6Sから差動増幅器6Aへの接続極性を逆にしたときは、式(19)の代りに、次式が使用される。
DX=ef/(b+c+VX/2Ap) (19′)
【0070】
光源の輝度が制御されることなく一定ならば、受光光量は、距離の自乗に反比例する。この場合の光電流IA、IBは、下記の通りとなる。
IA=p(c−d)(DO/DX)2
IB=p(c+d)(DO/DX)2
∴ VA=Ap(c−d)(DO/DX)2
VB=Ap(c+d)(DO/DX)2
但し、Aは増幅器の利得。
VA及びVBの和及び差を計算すると、
VA−VB=−2Apd(DO/DX)2
VA+VB= 2Apc(DO/DX)2
辺同士で割り算を行って、Ap及び(DO/DX)を消去すれば、
(VA−VB)/(VA+VB)
=VX/(VA+VB)=−d/c
∴ d=−cVX/(VA+VB) (21)
上式を、式(20)に代入すれば、次式が得られる。
DX=ef/{b+c−cVX/(VA+VB)} (22)
(因みに、受光光量が略一定値に制御されているときは、
VA+VB=2Apcとなり、式(22)は、式(19)と一致する。)
【0071】
(第7の実施例) この出願の発明の第7の実施例について説明する。
この出願の発明の第7の実施例は、第1の実施例における測距装置を下記の測距装置で置換したものに相当する。
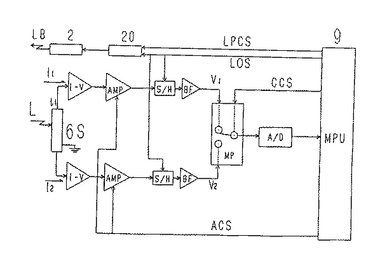
図16は、第7の実施例に使用する測距装置の入力回路のブロック図である。
図16において、2はバーコード読取走査用の光源、2Dは光源駆動回路、6Sは測距用光電変換器、9は集中制御装置(例えば、マイクロプロセッサユニット)である。
第7の実施例においても、測距用の投光光源は、バーコード読取走査用の光源(例えばレーザ)2が利用される。
【0072】
第7の実施例に使用される、測距用光電変換器6Sは、原理的には、第1の実施例に使用された合焦レンズ位置検出用光電変換器32PS(図2、3、15参照)と同一であって、図示の如く、細長形状の受光面と、第1の光電流出力端子t1と、第2の光電流出力端子t2と、共通電極とを具有する。
第1及び第2の光電流出力は、受光面への光点の入射位置によって異なる。
いま、受光面の長さを2c、受光面の中心位置から光点の入射位置までの距離をdとすると、両電流の比は、次の通りである。
I2/I1=(c+d)/(c−d)
=(1+d/c)/(1−d/c) (23)
式(23)の導出過程は、次の通りである。
第1の出力端子t1からの第1の光電流I1は、光点の入射位置から第2の出力端子t2までの距離に比例する。この距離は、(C/2−d)であるから、
I1=p(C−d) (24)
但し、pは比例定数(但し、受光光量には依存する)。
同様に、第2の光電流I2は、光点の入射位置から第1の出力端子t1までの距離に比例する。この距離は、(C/2+d)であるから、
I2=p(C+d) (25)
式(25)を式(24)で除して比例定数pを消去すれば、式(23)が得られる。
【0073】
第7の実施例においても、振動ミラー形走査装置4、被読取物T、及び測距用受光レンズ6Lが使用されるが、それらは第1の実施例と同様である。
第7の実施例の測距用光電変換器6Sは、前述の如く、第1、第6の実施例のものとは相違するが、その配置関係は、第6の実施例(図5(b)参照)と同様である。即ち、第7の実施例の測距用受光レンズ6L及び測距用光電変換器6Sは、基線D上に配設される。(図示は省略する。) 第7の実施例による測距時には、振動ミラー41を停止させ、基線Dに直角な方向(走査の中心方向、θ=0゜の方向)に投光する。
この間、各種の制御装置は、測距装置6の受光感度を上げるために、可能な限り、投光ビームは平行光、絞りは開放、発光出力は最大とするように、動作せしめられる。(但し、発光出力は、光放射の安全規格等で制限された範囲内に止めなければならない。)
被読取物Tからの反射光Lは、測距用受光レンズ6Lによって集光され、測距用光電変換器6Sの受光面上に結像せしめられる。そして、第1の出力端子t1に第1の光電流I1を、第2の出力端子t2に第2の光電流I2を発生させる。
【0074】
第1、第2の光電流I1、I2はそれぞれ、電流電圧変換器I−Vによって電圧信号V1、V2に変換される。電圧信号V1、V2はそれぞれ、可変増幅器AMPによって増幅され、サンプルホールド回路S/Hに入力される。
投光光源2は、光源駆動回路2Dにより駆動される。その光量は集中制御装置(例えばマイクロプロセッサユニット)9からの光出力制御信号LPCSによって制御される。投光光源2の点灯(消灯)は、点灯(消灯)指令信号LOSによって制御される。
測距動作中は、周囲光の影響を排除するために、光源2はパルス駆動される。実際の点灯時間は、測定一回当り10〜1000マイクロ秒程度である。この時間は、投光光源2及び受光回路のパルス応答速度特性に依拠して、最適値に決定される。
【0075】
第1、第2の出力端子には、投光光源2の消灯時でも、周囲光によって、電流I1of、I2ofが発生する。
周囲光に由来する電流成分I1of、I2ofの影響を排除するために、消灯時の電圧V1of、V2ofは、AD変換器A/DによってそれぞれAD変換され、ディジタルデータとして、集中制御装置(例えば、マイクロプロセッサユニット)9に入力される。
その直後に、集中制御装置(例えばマイクロプロセッサユニット)9は、点灯指令信号LOSを発して、投光光源2を点灯させる。
第1、第2のサンプルホールド回路S/H、S/Hはそれぞれ、点灯指令信号LOSに同期して、点灯時の電圧信号V1ON,V2ONをサンプルしホールドする。それらの電圧信号V1ON,V2ONは、AD変換器A/DによってそれぞれA/D変換され、ディジタルデータとして、集中制御装置(例えばマイクロプロセッサユニット)9に入力される。
【0076】
集中制御装置(例えばマイクロプロセッサユニット)9の内部には各電圧データが論理値としてストアされているので、次からの演算が容易に実行できる。
点灯時の電圧データV1ON、V2ONから、消灯時の電圧データV1of、V2ofを減算して、真の測距データV1t,V2tを計算する。即ち、
V1t=V1ON−V1of
V2t=V2ON−V2of
両式から、V2t/V1tを算出する。即ち、
V2t/V1t=(V2ON−V2of)/(V2ON−V2of) (26)
V2t/V1tは、前記の式(23)中のI2/I1に相当する。
そこで、上式(26)を,前記の式(23)中のI2/I1に代入することによって、測距値DXを計算できる。
(V2ON−V2of)/(V2ON−V2of)
=(1+d/c)/(1−d/c) (27)
【0077】
集中制御装置(マイクロプロセッサユニット)9の内部における上記の計算は通常100μsec以下でできる。
測定精度を向上させる為に、前記の測定シーケンスを繰り返し、平均値を出力する。繰り返し回数は通常10〜20回である。したがって、1回当りの測定時間は通常1msec以下である。
測定精度を良くする為には、投光光量を上げる必要があるが、そこに制限があるのは、前述の通りである。
【0078】
また、A/Dコンバーターの量子化精度を上げる為、点灯時データV1ONおよびV2ONが共に小さな値であった場合、集中制御装置(マイクロプロセッサユニット)9は増幅率切替信号ACSにより、増幅率を増加させ、最適な入力値となる様にしてから測定シーケンスをやり直す。
逆に、点灯時データV1ONまたはV2ONがA/Dコンバータの最大入力値を超えている場合、集中制御装置(マイクロプロセッサユニット)9は、増幅率切替信号ACSにより増幅率を低減してから、測定シーケンスをやり直す。
これらは、測距距離DXが大きく変わると、受光できる反射光の強度が変わる為である。
【0079】
(第8の実施例) この出願の発明の第8の実施例について説明する。
この出願の発明の第8の実施例は、第1の実施例の合焦装置3における合焦レンズ位置検出手段32を下記の合焦レンズ位置検出手段で置換したものに相当する。
光源(例えばレーザ)2の光軸から角度φだけ離れた方向の光(即ち側部光)の強さは、角φの減少関数である。
そのため、合焦レンズ位置検出用ポジションレンズ32PLの受光面が、前方に移動すれば(合焦レンズ31のx座標が増大すれば)受光光量が増大し、後方に移動すれば(合焦レンズ31のx座標が減少すれば)、受光量は減少する。即ち、合焦レンズ31が前方に移動すれば、合焦レンズ位置検出用光電変換素子32PSの出力が増大し、合焦レンズ31が後方に移動すれば、上記光電変換素子32PSの出力が減少する。
即ち、合焦レンズ位置検出手段32の出力(位置検出信号)は、合焦レンズ31のx座標の単調増加関数である。
それ故、上記単調増加関数の逆関数を求めることによって、合焦レンズ31のx座標を求めることが出来る。
【0080】
(その他の実施例) その他の実施例について説明する。
その他の実施例は、前記の諸実施例中の諸事項と、以下の諸事項とを組み合わせることによって、生成される。
(イ)第1の実施例の合焦装置3の合焦レンズ位置検出手段32における、合焦レンズ位置検出用光電変換器32PSは、多数の光電変換素子と位置検出用演算回路とで構成することが出来る。
(ロ)第1の実施例の振動ミラー形走査装置4における駆動手段は、圧電形電気機械変換器で構成することが出来る。
(ハ)第1の実施例の合焦装置3における合焦レンズ移動手段33は、可動鉄片形として構成することが出来る。
(ニ)集中制御装置9をASICで構成することができる。
(ホ)各実施例における電子回路部分を、集中制御装置9と共にIC化し、システム・オン・チップとすることが出来る。
【産業上の利用可能性】
【0081】
この出願の発明は、以上の様に構成したから、下記(a)〜(1)の通り、顕著な作用効果を奏することが出来る。
(a)被読取物が遠点にあったり近点にあったりして読取距離が一定していない時でも、光学的情報を正確に読み取ることが出来る、超長読取深度の光学的情報読取装置を実現することが出来る。別言すれば、読取範囲の非常に大きな光学的情報読取装置を実現することが出来る。
(b)小形、軽量、且低コストの合焦装置及び測距装置を実現することが出来る。これによって、全体としても小形、軽量、且低コストの光学的情報読取装置を実現することが出来る。
(c)小形、軽量、且低コストの合焦装置及び測距装置を搭載した、手持式光学的情報読取装置を実現することが出来る。
【0082】
(d)合焦装置に対して、可変絞り装置を付加することによって、被読取物Tが近点にある時は、ビームウエストの細くなり過ぎによる解像度の上り過ぎを防止し、被読取物Tが遠点にある時は、ビームウエストの太くなり過ぎによる解像度の下がり過ぎを防止し、以って超長深度に亙って解像度を適正範囲に維持すると共に、被読取物Tが近点にある時に、近点の前後におけるビーム径の急激な増加を防止し、以って、走査ビームの偏向に伴う解像度の変動を防止して、S/N比を大幅に向上させた光学的情報読取装置を実現することが出来る。
(e)光源の輝度(従って光量)を、距離測定信号及び/又は走査角信号の1次関数に基づいて、制御することによって、光電変換器7の受光光量を適正範囲に維持した、光学的情報読取装置を実現することが出来る。
(f)前面に走査ミラー、後面に受光ミラーを有する振動ミラー形走査装置を使用することによって、即ち後面の受光ミラーを受光専用に利用することによって、受光口径を大きくし、従って受光光量を大きくした、光学的情報読取装置を実現することが出来る。
【0083】
(g)測距データを用いて、走査角を調節することによって、近点でも遠点でも必要な読幅を確保することが出来る。
(h)測距データを用いて、レーザ光パワを制御することによって、受光利得および視認性の安定化を計ることが出来る。
(i)測距データを用いて、受光利得を制御することによって、受光利得の安定化に寄与することが出来る。
(j)測距データを用いて、走査速度を調節することによって、電気的アナログ信号の周波数帯域を制御することが出来る。
(k)走査角データを用いて、レーザ光パワ又は受光利得を調節することによって、走査両側の受光光量の低下を補償することが出来る。
(1)走査角データを用いて、走査中央と両側との光路差による合焦物のずれを補正することが出来る。
【図面の簡単な説明】
【0084】
【図1】この出願の発明による光学的情報読取装置の第1の実施例の全体構成を示す図である。
【図2】上記第1の実施例に使用する自動合焦装置の動作原理図である。
【図3】上記自動合焦装置の要部をなす光学的合焦ユニットの縦断面図である。
【図4】上記第1の実施例に使用する第1の測距装置の原理説明図である。
【図5】上記第1の実施例に使用する第2の測距装置の原理説明図である。
【図6】上記第1の実施例に使用する振動ミラー形走査装置の水平断面図及び垂直断面図である。
【図7】この出願の発明による光学的情報読取装置の第2の実施例に使用する可変絞り装置の動作原理図である。
【図8】この出願の発明による光学的情報読取装置の第3の実施例に使用する合焦装置及び可変絞り装置の動作原理図である。
【図9】合焦レンズ通過後のレーザビームの縦断面図である。
【図10】固定絞り通過後のレーザビームのウエスト位置及び直径を示すグラフである。
【図11】可変絞り通過後のレーザビームのウエスト位置及び直径を示すグラフである。
【図12】この出願の発明による光学的情報読取装置の第4の実施例の全体構成を示す図である。
【図13】上記第4の実施例に使用する走査式振動ミラー形走査装置を示す図である。
【図14】合焦レンズによる光の集光位置を示す図である。
【図15】合焦レンズ位置制御回路のブロック図である。
【図16】この出願の発明の第7の実施例に使用する測距装置の入力回路のブロック図である。
【図17】光源駆動回路のブロック図である。
【図18】従来の自動焦点形スキャナの動作原理図である。
【図19】従来の自動焦点形スキャナを利用した物流仕分けシステムの斜視図である。
【符号の説明】
【0085】
1 筐体
2 光源
2D 光源駆動装置
3 自動合焦装置(自動収束系)
31 合焦レンズ
32 合焦レンズ位置検出手段
32PL 合焦レンズ位置検出用ポジションレンズ
32PS 合焦レンズ位置検出用光電変換器(素子)
32PC 合焦レンズ位置演算回路
33 合焦レンズ移動手段
33C 可動線輪(励磁線輪)
33CD 合焦レンズ位置駆動回路
33M 永久磁石
33Y 継鉄(ヨーク)
34 合焦レンズ位置サーボ回路
35 電子的分圧器
3B 鏡筒(バレル)
3H 合焦レンズホルダ
3LL 合焦レンズ位置検出用レーザ光
3SP 支持バネ
3U 光学的合焦ユニット
4 振動ミラー形走査装置
411 第1の振動ミラー(走査用ミラー)
412 第2の振動ミラー(受光用ミラー)
42 可動部
421 可動磁石
422 可動継鉄(ヨーク)
424 磁性体
425 回動軸
46 ホルダ
47 固定継鉄
471固定継鉄の対辺
472固定継鉄の対辺
48 固定磁石
49 駆動線輪
5 受光光学系
6 測距装置(距離計)
6A 差動増幅器
6C 測距用演算手段
6L 測距用受光レンズ
6P 測距用投光器
6R 測距用光電変換器
6s 測距用光電変換素子
6S 測距用光電変換器
7 光電変換器(光電変換器)
8 信号処理部
9 集中制御装置(例えばマイクロプロセッサユニット)
10 可変絞り装置
DS 距離信号
I 可変絞り
IC 可変絞り制御回路
LB レーザビーム M 電動モータ
MC 合焦レンズ位置及び絞り回動角制御回路
MS レーザダイオードの監視信号
p 光学的情報パターン(例えばバーコード記号)
SB 走査ビーム
T 被読取物(例えばラベル)
TS 温度センサ
VD 電子的分圧器
【技術分野】
【0001】
この出願の発明は、光ビームを用いて光学的情報を読み取るための光ビーム走査式光学的情報読取装置に関する。特に、近点から遠点まで、長深度に亙って、光学的情報を精密に読み取るための可変焦点形光ビーム走査式光学的情報読取装置に関する。
【背景技術】
【0002】
例えば物流分野では、一般に、固定スキャナとラベルとの距離が一定していない。
そのため、自動焦点形固定スキャナが賞用されている(1992年7月1日株式会社工業調査会発行、浅野恭右外1名編「これからのバーコードシステム」第203〜204頁参照)。
図18は、その種の従来の自動焦点形固定スキャナの動作原理図である。
その種の自動焦点形固定スキャナは、筐体1と、レーザ素子2と、収束光学系3と、ポリゴンミラー装置4と、受光光学系(図示しない。)と、距離計6とで構成されている。
レーザ素子2、収束光学系3、ポリゴンミラー装置4、及び受光光学系は、筐体1内に収納されている。
しかし、距離計6だけは、筐体1内に収納されず、外部に配設されている。
【0003】
収束光学系は、収束レンズ31、収束レンズ移動機構(図示しない。)、収束レンズ位置サーボ機構等で構成されている。サーボポテンショメータ3Pは、収束レンズ位置サーボ機構の一部である。
サーボポテンショメータ3Pの可動部は、レンズ移動機構に連結され、収束レンズ31やレンズ移動機構と共に、収束光学系の可動部を構成している。
距離計6からの距離信号DSは、サーボポテンショメータ3Pに与えられる。収束レンズ位置サーボ機構は、収束レンズ31の位置を調節して、その焦点をラベル表面に合致させる。
【0004】
図19は、従来の自動焦点形固定スキャナを利用した物流仕分けシステムの一例を示す模式図である。
この種の従来例の距離計6は、測距用投光器6Pと測距用受光器6Rとで構成され、測距用受光器6Rは、図示の如く、垂直方向に配列された複数個の受光素子で構成され、測距用投光器6Pも同様に、垂直方向に配列された複数個の発光素子(図示しない)で構成されている。
バーコード記号pを付された各個の物品は、コンベアに載って、測距用投光器6Pと測距用受光器6Rとの間を通過する。
上記の距離計6は先ず、遮光を検知した受光素子の内、どれが最高位の受光素子かを判別することによって、コンベア上の物体の高さhXを検知することが出来る。
固定スキャナの高さHSは既知であるから、固定スキャナとバーコード記号pとの間の距離DXは、次式によって、算出することが出来る。
DX=HS−hX (1)
その余の動作は、図14のそれと同様である。
【発明の開示】
【発明が解決しようとする課題】
【0005】
図19の自動焦点形固定スキャナに使用されている距離計6は、測距用投光器6Pと被読取物Tと測距用受光器6Rとが一直線上にあるようにするため、占有体積が大きくなるから、本質的に小形化が困難である。その上、測距用投光器6Pと測距用受光器6Rとは、本質的に固定式であるから、光ビーム走査形の手持式スキャナに搭載することは、不可能である。
(ついでながら、産業分野を異にするテレビカメラの分野においては、空間周波数成分の変動を利用した合焦装置(詳説すれば、焦点整合がとれた時は映像信号(空間周波数信号)中の高調波成分が増大し、焦点整合から外れた時は減少するという現象を利用した合焦装置)が利用されているが、手持式スキャナに搭載するには、構成が複雑で、大形である。) 図18の収束光学系3中の可動部は、前述の如く、収束レンズ31や収束レンズ移動機構の外部に、それらと結合したサーボポテンショメータ3Pの可動部を含有するから、その分、質量が大となる。従って、その分移動速度が遅くなるから、読取距離を急変させた場合は、これに追従することが困難となる。
又、構成が複雑であり、一層の小形化が困難である。
【0006】
それ故、この出願の発明の第1の目的は、被読取物が遠点にあったり近点にあったりして読取距離が一定しない時でも、光学的情報を正確に読み取ることが出来る、超長読取深度の光学的情報読取装置を提供することにある。別言すれば、読取範囲の非常に大きな光学的情報読取装置を提供することにある。
この出願の発明の第2の目的は、小形、軽量、且低コストの合焦装置及び測距装置を実現することによって、全体としても小形、軽量、且低コストの光学的情報読取装置を提供することにある。
この出願の発明の第3の目的は、小形、軽量、且低コストの合焦装置及び測距装置を搭載した、手持式光学的情報読取装置を提供することにある。
【0007】
この出願の発明の第4の目的は、可変絞り装置を付加することによって、近点においては解像度の上り過ぎを防止し、遠点においてはその下がり過ぎを防止し、以って超長深度に亙って解像度を適正値に維持することが出来る、光学的情報読取装置を提供することにある。
この出願の発明の第5の目的は、光源の光量を、距離信号及び/又は走査角信号に基づいて、制御することによって、受光光量を適正値に維持することが出来る、光学的情報読取装置を提供することにある。
この出願の発明の第6の目的は、温度変化に起因する、構成部材の形状、寸法、物性の変化に基づく、装置全体の特性の変化を補償することにある。
この出願の発明の第7の目的は、前面に走査ミラー、後面に受光ミラーを有する振動ミラー形走査装置を使用することによって、即ち後面の受光ミラーを受光専用に利用することによって、受光口径を大きくし、従って受光光量を大きくすることが出来る、光学的情報読取装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の諸問題を解決し、且上記の諸目的を達成するために、この出願の発明による光学的情報読取装置は、 被読取物Tを走査する光ビームを発出する光源2と、 光源2から発出した光ビームを被読取物T上に合焦させる合焦装置3と、 上記光ビームを、水平面内において、周期的に反射偏向させる振動ミラー形走査装置4と、 被読取物Tから反射して来た反射光を所定の位置に集光する受光光学系5と、 受光光学系5の後段に配設され、上記反射光を電気的アナログ信号に変換する光電変換器7と、 光電変換器7の出力端子に接続された信号処理部8と、 振動ミラー形走査装置4から被読取物Tまでの距離を測長する測距装置6と、 これらの要素の全部又は一部を収納する筐体1と で構成し、 測距装置6と合焦装置3とは、測距装置6からの距離信号を、合焦装置3に対して位置指令信号として与えるように、接続したものである。
【0009】
上記の合焦装置3は、合焦レンズ31と、合焦レンズ位置検出手段32と、合焦レンズ移動手段33と、合焦レンズ位置サーボ回路34とで構成される。合焦レンズ位置検出手段32は、サーボポテンショメータ等の機械的手段を使用せず、合焦レンズ位置検出用ポジションレンズ32PLと合焦レンズ位置検出用受光器32PS等の光学的手段を使用して構成したものである。合焦装置3には、可変絞り装置10を付加することが出来る。
上記の振動ミラー形走査装置4は、振動ミラー41と駆動手段とを一体的に構成したものを使用することが出来る。
上記の測距装置6は、測距専用の投光器を使用せず、測距用受光レンズと測距用光電変換器と演算回路とで構成したものである。
光源2には、振動ミラー形走査装置4と被読取物Tとの間の距離変動に起因する受光光量の変動を補償する自動輝度制御装置を付加することが出来る。
合焦装置3、可変絞り装置10、自動光源輝度制御装置には、温度補償装置を付加することが出来る。
【発明の効果】
【0010】
光源2から発出した光ビームは、振動走査形ミラー装置4によって、周期的に反射偏向せしめられ、被読取物T上を反復的に走査せしめられる。
被読取物Tからの反射光は、受光光学系5を経由して、光電変換器7に至り、電気的アナログ信号に変換される。電気的アナログ信号は、信号処理部8以下においてディジタル信号に変換され、光学的情報が解読される。
測距装置6は、測距用受光レンズ6Lと測距用光電変換器6Sと測距用演算回路6Cとを使用し、被読取物Tからの走査光由来の反射光のみを利用して、振動ミラー形走査装置4から被読取物Tまでの距離を直接的に測定して、距離測定信号を出力する。測距装置6は、測距専用の投光器を使用せず、又、測距用演算回路6Cも簡単であるから、小形且軽量となる。
【0011】
合焦装置3の合焦レンズ位置検出手段32は、例えば光ビームの1走査周期中に合焦レンズ31の位置を検出し、合焦レンズ位置サーボ回路34に対して、合焦レンズ位置検出信号を、与える。
合焦装置3の合焦レンズ位置サーボ回路34は、測距装置6からの距離測定信号に基づく合焦レンズ位置指令信号と台焦レンズ位置検出手段32との差が零になった時、一定所望の出力電流を、合焦レンズ移動手段33に与える。
合焦装置3の合焦レンズ移動手段33は、合焦レンズ位置サーボ回路34からの差信号に基づいて台焦レンズ31を光軸に沿って移動させることによって、走査用光ビームの焦点を、近点から遠点まで、超長深度に亙って、移動させることが出来る。光ビームの焦点は、被読取物Tと合致せしめられる。
合焦装置3は、サーボポテンショメータ等の機械的手段を用いていないから、小形軽量となる。
【0012】
可変絞り装置10は、被読取物Tが近点にある時(従って、合焦レンズを近点に合焦させた時)には、可変絞りIの開口口径を相対的に小さくし、可変絞り出射時の光ビーム径2のωdを相対的に小さくすることによって、近点におけるビームウエスト径を相対的に太くすると共に、近点の前後におけるビーム径2ωZCの急激な変化を防止する。これによって、可変絞り装置10は、光ビームの近点合焦時におけるビームウエスト径2ωOCの細くなり過ぎと、近点前後のビーム径2ωZCの急激な増加とを防止し、S/N比の減少を防止することが出来る。
又、可変絞り装置10は、被読取物Tが遠点にある時(従って、合焦レンズを遠点に合焦させた時)には、可変絞りIの開口口径を相対的に大きくし、可変絞り出射時の光ビーム径2ωdを相対的に大きくすることによって、遠点におけるビームウエスト径2ωOFを相対的に小さくする。これによって、可変絞り装置10は、光ビームの遠点合焦時におけるビームウエスト径2ωOFの太くなり過ぎを防止し、以ってS/N比の減少を防止することが出来る。
【発明を実施するための最良の形態】
【0013】
(第1の実施例) この出願の発明による光学的情報読取装置の第1の実施例について説明する。
先ず、その全体構成について、概括的に説明する。
図1は、この出願の発明の第1の実施例の全体構成を示す図である。
図1において、2は光源(例えばレーザダイオード)、2Dは光源駆動回路、3は合焦装置、4は振動ミラー形走査装置、5は受光光学系、6は測距装置、7は光電変換器(受光器)、8は信号処理部、9は集中制御装置(例えばマイクロプロセッサユニット)、TSは温度センサ、Tは被読取物である。筐体1の記載は省略してある。
【0014】
上記の諸要累は、光源2から発出した光が、合焦装置3、振動ミラー形走査装置4の第1のミラー(走査用ミラー)411、被読取物T、受光光学系5の集光兼偏向手段5CP、及び振動ミラー形走査装置4の第2のミラー(受光ミラー)412を経由して、光電変換器(受光器)7に到達し得るように、配置される。光電変換器(受光器)7の出力端子には、信号処理部8が接続される。
測距装置6の測距用受光レンズ6Lは、振動ミラー形走査装置4の走査ミラー411から横方向に距離dだけ離隔した位置に配設される。
測距装置6は、走査ミラー411と被読取物Tとの間の距離(又は被読取物Tと測距用受光レンズ6Lとの間の距離)を測定して、距離信号DSを出力する。
合焦装置3は、上記の距離信号DSに基づいて合焦レンズ31を光軸方向に移動させ、従って光源2と合焦レンズ31との間隔を変化させて、焦点を被読取物T上に合致させる。
この間、温度センサTSの出力信号に基づいて、システム全体の温度特性が補償される。
又、光電変換器7(又は測距用光電変換器6S)の出力に基づいて、若しくは走査角信号に基づいて、光源2の輝度が制御される。
かくして、被読取物T上のバーコード記号pが読み取られる。
【0015】
次に、第1の実施例の部分構成及び部分動作について説明する。
(第1の実施例の合焦装置) 図2は、第1の実施例に使用する合焦装置3の動作原理図であり、図3は、同実施例に使用する合焦装置3の要部をなす光学的合焦ユニット3Uを示す図である。
図2において、31は合焦レンズ、3Hは筒状の合焦レンズホルダ、32は合焦レンズ位置検出手段、33は合焦レンズ移動手段、34は合焦レンズ位置サーボ回路(エラー増幅器)、35は電子的分圧器である。
合焦レンズ31は、ガラス又は合成樹脂等の透明材料からなる。
合焦レンズ位置検出手段32は、合焦レンズ位置検出用ポジションレンズ32PLと合焦レンズ位置検出用光電変換器32PSと、合焦レンズ位置演算回路32PCとからなる。
【0016】
筒状の合焦レンズホルダ3Hには、その周壁を、例えば図示の如く、若干斜め方向に貫通する光の側路(即ち、径方向(ラジアル方向)よりも若干前方に傾いた方向に貫通する光の側路)が形成され、ここに合焦レンズ位置検出用ポジションレンズ32PLが埋め込まれる。
合焦レンズ位置検出用ポジションレンズ32PLによる集光点には、合焦レンズ位置検出用光電変換器32PSが配設され、合焦レンズ位置検出用光電変換器32PSの出力端子には合焦レンズ位置演算回路32PCが接続される。
合焦レンズ位置検出用光電変換器32PSの出力、即ち合焦レンズ位置検出手段32の出力は、合焦レンズ位置検出信号となる。合焦レンズ位置検出信号の大きさは、合焦レンズホルダ3Hの位置の関数であり、従って又、合焦レンズ31の位置の関数である。
【0017】
合焦レンズ移動手段33は、可動線輪駆動回路33CDと、可動線輪33C等からなる。可動線輪33Cは、合焦レンズホルダ3Hに連結される。
合焦レンズ位置サーボ回路(エラー増幅器)34は、例えば演算増幅器を用いて構成され、+端子への入力電圧と−端子への帰還電圧との合成電圧が略零の状態で、一定所望の出力電流となる。
合焦レンズ位置サーボ回路34の+端子には、測距装置6から直接、又は集中制御装置(例えばマイクロプロセッサユニット)9を介して、合焦レンズ位置指令信号が与えられる。又、−端子には、合焦レンズ位置検出用光電変換器32PSから、合焦レンズ位置演算回路32PCを介して、合焦レンズ位置検出信号が与えられる。(電子的分圧器35については後述する。) 合焦レンズ位置サーボ回路34の出力(電流)は、可動線輪駆動回路33CDに与えられ、可動線輪駆動回路33CDの出力(電流)は、可動線輪33Cに与えられる。
合焦レンズ位置指令信号と合焦レンズ位置検出信号との差の信号が零になった時、可動線輪33Cは停止(静止)する。
【0018】
図3(a)は、第1の実施例に使用する合焦装置3の要部をなす光学的合焦ユニット3Uの縦断面図であり、同図(b)は、これに使用する支持バネ3SPの正面図、同図(c)は、合焦レンズ位置検出用受光器の動作原理図である。
図3(a)において、2は光源(例えばレーザ)、31は合焦レンズ、3Hは合焦レンズホルダ、3SP,3SPは1対の支持バネ、3Bは鏡筒(バレル)、32PLは合焦レンズ位置検出用ポジションレンズ、32PSは合焦レンズ位置検出用受光器、33Cは可動線輪、33Mは永久磁石、33Yは継鉄(ヨーク)である。
【0019】
合焦レンズ31は合焦レンズホルダ3Hによって保持され、合焦レンズホルダ3Hは1対の支持バネ3SP,3SPによって支持・挟持され、両支持バネ3SP,3SPは、例えば、鏡筒3Bの内周壁に設けた段部によって、それぞれ固定される。
合焦レンズホルダ3H及び1対の支持バネ3SP,3SPは、共同して、合焦レンズ支持手段39を構成する。
支持バネ3SPは、例えば図3(b)の如く、外側リング、内側リング、両リングを連結する数本の連結部(例えば3本の連結部)とで、構成される。支持バネ3SPのバネ作用は、例えば3本の連結部によって、担持される。各連結部には、所要のバネ力に応じて、適宜の長さが与えられる。
合焦レンズホルダ3Hは、1対の支持バネ3SP,3SPによって挟持されているから、完全に光軸方向にのみ移動可能となる。従って、合焦レンズ31も完全に光軸方向にのみ移動可能となる。
【0020】
環状の可動線輪33Cは、合焦レンズホルダ3Hの光源側に直列的に連結されている。
上記の諸要素のうち、合焦レンズ31、合焦レンズホルダ3H、合焦レンズ位置検出用ポジションレンズ32PL、及び可動線輪33Cは、共同して、可動部を構成する。
可動線輪33Cの外側には、環状の永久磁石33Mが同軸状に配設され、該環状の永久磁石33Mの外側には、略環状又は有孔皿状(以下、単に「環状」という。)の継鉄33Yが配設される。
略環状の継鉄33Yは、鏡筒3Bの内周壁に固定される。
【0021】
環状の永久磁石33Mは、例えば径方向(ラジアル方向)に着磁される。
継鉄33Yは、鉄その他の強磁性体製であるから、永久磁石33Mの磁束を可動部の可動線輪33Cへ効率よく導く。
可動線輪33Cは、通電により、軸方向に、正又は負の力を受ける。受ける力は、駆動電流の大きさと、駆動電流に交差する磁界の大きさとの積に比例する。
そのため、可動線輪33Cが軸方向に前進若しくは後退する。
即ち、可動線輪33Cに対して駆動電流を供給すると、合焦レンズ31は、駆動電流の正負に応じて、軸方向に前進若しくは後退することとなる。
【0022】
合焦レンズ位置検出用ポジションレンズ32PLは、可動部の一部をなす合焦レンズホルダ3Hの周壁に埋め込まれる。合焦レンズ位置検出用ボジションレンズ32PLの内側表面の位置は、合焦レンズ31よりも光源寄りにあり、その光軸は、図示の如く、合焦レンズホルダ3Hの径方向(ラジアル方向)よりも若干前方に傾斜させてある。(但し、傾斜の有無は本質的な事項ではない。) 合焦レンズ位置検出用ポジションレンズ32PLの光軸(の延長線)と交差する、鏡筒3Bの周壁部分には、図示の如く、貫通孔が穿設され、該鏡筒3Bの外周壁寄りに合焦レンズ位置検出用光電変換器32PSが配設される。
【0023】
鏡筒3Bの貫通孔の断面形状及び合焦レンズ位置検出用光電変換器32PSの受光面形状は何れも、縦長であって、それらの長手方向寸法は、合焦レンズ位置検出用ポジションレンズ32PLの移動範囲を完全にカバーするに足る大きさを有していなければならない。(しかし、合焦レンズ位置検出用光電変換器32PSが、合焦レンズ位置検出用ポジションレンズ32PLの移動方向(合焦レンズ31の光軸方向)と平行である必要はない。) 合焦レンズ位置検出用ポジションレンズ32PLの内側表面に到達したレーザ光(側部光)は、図3の合焦レンズ位置検出用レーザ光3LLの如く、合焦レンズホルダ3Hの外側に導出され、合焦レンズ位置検出用受光器32PSの受光面に入射せしめられる。合焦レンズ位置検出用ポジションレンズ32PLは、レーザ光3LLの集光点が合焦レンズ位置検出用光電変換器32PSの受光面と合致するように、設計される。
【0024】
上記の諸要素のうち、鏡筒3B、合焦レンズ位置検出用受光器32PS、永久磁石33M、及び継鉄(ヨーク)33Yは、共同して、固定部を構成する。
そして、上記の固定部と、前記の可動部と、前記の支持バネ3SPとは、共同して、光学的合焦ユニット3Uを構成する。
光源2は、この実施例では、図示の如く、鏡筒3Bの内部に、しかも可動線輪33Cの内方空間に配置され、継鉄(ヨーク)33Yによって支持される。
これによって、軸方向の寸法が縮小される。
【0025】
合焦レンズ31の位置と、合焦レンズ31による光の集光位置との関数関係について説明する。
図14は、合焦レンズ31による光の集光位置を示す図である。
焦点距離f0なる合焦レンズ31を、図示の如く、光源2から距離f0の位置に置いた場合、合焦レンズ31から出た光は、平行光となる。
そこでこの位置を、合焦レンズ31に関して、基準位置とすることが出来る。或は合焦レンズ31の光軸方向に即してx軸をとり、この位置を原点(x=0)とすることが出来る。
合焦レンズ31が基準位置(x=0)からΔfだけ反光源側(被読取物T側)に遠ざかると、レーザ光は合焦レンズからf2の位置(x=f2)に集光する。
【0026】
見易くするため、f0+Δf=f1とおくと、上記の関係は、レンズの公式
(1/f0)=(1/f1)+(1/f2) (1)
として、良く知られている。上式を変形すれば、次式が得られる。
f2=(1/Δf)f02+f0 (2)
即ち、f2は(1/Δf)に比例する。
合焦レンズ31から測距原点までの内部光路長をL、測距原点からバーコードまでの距離をDxとすれば、f2は次式によって与えられる。
f2=Dx+L (3)
式(2)、(3)から、次式が得られる。
Δf=f02/(f2−f0)=f02/(Dx+L−f0) (4)
式(4)のΔfは、距離信号Dxに基づく合焦レンズ位置指令信号と解することが出来る。かかるΔfを、以下、Δfcと書く。
【0027】
合焦レンズ位置検出用光電変換器32PS及び合焦レンズ位置制御回路34について説明する。
図15は、合焦レンズ位置検出用光電変換器32PSの側面図、及び合焦レンズ位置制御回路34のブロック図である。
図15において、32PSは合焦レンズ位置検出用光電変換器、34は合焦レンズ位置制御回路、33Cは可動線輪、33CDは可動線輪駆動回路、9は集中制御装置(例えばマイクロプロセッサユニット)である。
合焦レンズ位置検出用光電変換器32PSの動作特性は、以下の通りである。
合焦レンズ位置検出用光電変換器32PSは、その受光面にスポット光が到来すると、A端に電流Iaを、B端に電流Ibを発生する。電流Ia及びIbの大きさは、スポット光が当たった位置によって異なる。
合焦レンズ位置検出用光電変換器32PSの長手方向に沿ってx′軸をとり、A端を原点(x′=0)、B端をx′=Wとし、且簡単のためスポット光の強さが一定であるとすると、電流Ia,Ibの大きさはそれぞれ次の通りとなる。
Ia=p(W−x′),Ib=px′ (5)
但し、pは比例定数。
【0028】
合焦レンズ位置検出用光電変換器32PSは、図3(a)の如く、光学的合焦ユニット3Uの鏡筒3Bに固定されているから、移動しない。
これに対して、合焦レンズ位置検出用ポジションレンズ32PLは、前述の如く、光学的合焦ユニット3Uの可動部(例えば可動線輸33C)に連結されているから、合焦レンズ31の移動につれて移動する。
合焦レンズ位置検出用ポジションレンズ32PLは、図3(a)の如く、レーザ光源2の不要光(合焦レンズ31に入射しない側部光)を取り込み、且集光して、合焦レンズ位置検出用レーザ光3LLを形成する。その光点(または光条)は、合焦レンズ位置検出用光電変換器32PSの受光面に当てられる。
かくして、合焦レンズ位置検出用ポジションレンズ32PLにより集光された光点(または光条)は、合焦レンズ位置検出用光電変換器32PS上を、合焦レンズ31の移動につれて移動する。合焦レンズ31の移動距離をΔf、光点(または光条)の移動距離をΔf′とすれば、近似的に次式が成立する。
Δf′=aΔf (6)
但し、aは比例定数。
上記の比例定数aは、図3(a)から明らかな如く、略1に近い値である。
【0029】
いま、Δf=0(従ってx=0)のとき、x′=gとする。
即ち、合焦レンズ31が基準位置(x=0)にあるとき、合焦レンズ位置検出用ポジションレンズ32PLにより集光された合焦レンズ位置検出用レーザ光3LLの光点が、合焦レンズ位置検出用光電変換器32PS上に当たる点(位置)を、x′=gとする。
そして、x=Δfのとき、x′=g+Δf′とする。
即ち、合焦レンズ31が基準位置からΔfだけ被読取物T側に移動したとき、合焦レンズ位置検出用ポジションレンズ32PLにより集光された合焦レンズ位置検出用レーザ光3LLの光点が、合焦レンズ位置検出用光電変換器32PS上に当たる点(位置)を、図3(a)の如く、x′=g+Δf′とする。
そうすると、式(5)、(6)に基づいて、次式が得られる。
Ib/(Ia+Ib)=x′/W=(Δf′+g)/W =(aΔf+g)/W (7)
但し、Wは合焦レンズ位置検出用光電変換器32PSの全受光幅。
この式は、入射光量が変化しても成立する。
【0030】
式(7)を変形すれば、次式となる。
Δf=〔{WIb/(Ia+Ib)}−g〕/a (8)
式(8)によるΔfは、合焦レンズ位置測定信号である。この場合のΔfを、以下、Δfmと書く。
原理的には、式(4)による合焦レンズ位置指令信号Δfcと、式(8)による合焦レンズ位置測定信号Δfmとを、図2の合焦レンズ位置サーボ回路34中の差動増幅器(エラー増幅器)の各入力端子に印加することが可能である。
合焦動作が開始すると、Δfが増大し、従ってΔfmが増大するが、ΔfmがΔfcと一致した所で、合焦レンズ31が停止する。そして、合焦動作が終了する。
【0031】
図15に戻って、電子的分圧器35及びエラー増幅器E(即ち合焦レンズ位置サーボ回路34)について説明する。
A端からの電流信号Ia、及びB端からの電流信号Ibは、それぞれ電圧信号に変換され、Va,Vbとなる。
A端からの電圧信号Vaは加算器Aに印加され、B端からの電圧信号Vbは加算器A、及びエラー増幅器Eの−に印加される。
加算器Aでは、和信号Va+Vbが作られる。
和信号Va+Vbは、電子的分圧器VDの第1の入力端子に印加される。
式(7)は、電圧信号Va、Vb並びにVa+Vbを用いて、次のように、書き換えられる。
Vb/(Va+Vb)=(aΔfc+g)/W (9)
Vb=(Va+Vb)(aΔfc+g)/W (10)
式(10)は、入射光量が変化しても成立する。
中央制御装置(例えばマイクロプロセッサユニット)9は、分圧制御信号DCSを、電子的分圧器VDの第2の入力端子に送る。
分圧制御信号DCSによる分圧比は、(aΔfc+g)/Wである。
電子的分圧器VDは、和信号Va+Vbに、分圧比(aΔfc+g)/Wを乗じた値を出力する。
【0032】
電子的分圧器VDの出力と、実際のVbとを、エラー増幅器E(即ち合焦レンズ位置サーボ回路34)に入力し、その出力を可動線輪33Cに印加する。
合焦動作が開始すると、Δfの増大につれてΔf′が増大し、従って、実際のVbが増大するが、Vbが(Va+Vb)(aΔfc+g)/Wと合致した所で、合焦レンズ31が停止する。そして、合焦動作が終了する。
かくして、合焦レンズ31を、中央制御装置(例えばマイクロプロセッサユニット)9が指令した位置(x=Δfc)に、保持する事ができる。
式(4)、(8)に基づく合焦動作(図2参照)と、式(10)に基づく合焦動作(図15)は、本質的に等価である。但し、演算回数は後者の方が少なくて済む。
図15の電子的分圧器VDには、デジタルアナログコンバータA/Dや、E2POT(サイコーネー)等が利用できる。
合焦レンズ位置検出のための専用光源は、必要でない。
【0033】
(第1の実施例の測距装置) 第1の実施例に使用する第1の測距装置について説明する。
図4は、同実施例に使用する第1の測距装置の原理説明図である。
図4(a)において、2は光源、41は振動ミラー、Tは被読取物、6Lは測距用受光レンズ、6sは小径の測距用光電変換素子、a,は振動ミラー41の走査中心線(即ち読取方向中心線)、b2は測距用受光レンズ6Lの受光中心線である。
測距専用の投光光源は、必要としない。
【0034】
説明の便のため、
走査中心線a1と受光中心線b2との間の距離をe、
振動ミラー41と被読取物Tとの間の距離(又は測距用受光レンズ6Lと被読取物Tとの間の距離)をDx、
走査中心線a1と被読取物Tとの交点をA、
受光中心線b2と被読取物Tとの交点をB、
点Aから測距用受光レンズ6Lに向かう反射光線をa2、
振動ミラー41から点Bに向かう光線をb1、
振動ミラー41の中心点から線分ABを見込む角(走査中心線a1と点Bに向かう光線b1とのなす角=振り角)をθ
とする。
簡単のため、走査中心線a1と被読取物Tとは直交している(即ち読取中心線a1と被読取物Tとは直交している)ものとする。
eの値は所与であるから、振り角θが計測可能ならば、被読取物Tまでの距離DXは、次式で与えられる。
DX=e/tanθ (11)
【0035】
さて、測距用光電変換素子6sは小径であるから、受光中心線b2から外れて到来する光線(例えば点Aから到来する光線a2)は、図示の如く、測距用光電変換素子6sから外れることとなり、受光されない。
従って、測距用光電変換素子6sで受光される光線は、受光中心線b2に沿って到来する光線のみである。
走査ビームが点Aを通過する時点tAは、走査用同期信号に基づいて決定することが出来る。走査ビームが点Bを通過する時点tBは、測距用光電変換素子6sの出力が極大になる時点であるから、出力極大時点を検知することによって、検知することが出来る。出力極大時点の検出には、公知の手段が使用される。
【0036】
時点tAと時点tBとの時間差をtdとすれば、振動ミラー41の中心点から線分ABを見込む角(振り角)θは、時間差tdに比例する。即ち、
θ=ktd (12) 但し、kは走査速度によって決まる比例定数。
従って、被読取物Tまでの距離Dxは、次式によって与えられる。
DX=e/tan(ktd)=e cot(ktd) (13)
図4(b)は、図4(a)における被読取物Tを、点Aを中心として、反時計方向に角ψだけ、回転させた場合を示す。破線T′は、被読取物の回転後の現在位置を示す。
角ψの回転によって誤差DX′が生じる。DX′は次式によって与えられる。
DX′=e tanψ (14)
角ψ(ラディアン)が微小であれば、DX′≒eψ≒0であるから、焦点整合に支障を来す虞(おそれ)はない。
【0037】
(第1の実施例の振動ミラー形走査装置) 第1の実施例に使用する振動ミラー形走査装置4について説明する。
図6(a)及び(b)は、同振動ミラー形走査装置の水平断面図及び垂直断面図である。
図6(a)及び(b)において、411は第1の反射ミラー(走査用ミラー)、412は第2の反射ミラー(受光用ミラー)、42は可動部、46はホルダ、47は固定継鉄(ヨーク)、49は駆動巻線である。
可動部42は、可動部本体と回転軸425とを含有し、可動部本体は、板状、棒状又は立体状であって、2個の可動磁石421、421と、可動継鉄422とを含有する。
第1の反射ミラー411と可動部本体と第2の反射ミラー412とは、一体的に構成する。
【0038】
駆動巻線49が通電されていない時は、可動体は図示の位置に静止する。
可動体を静止位置から適宜の角度回動させて釈放すると、可動磁石421と継鉄47との間に吸引力(磁気バネ力)が発生するから、可動体42は、自由往復振動を開始する。
駆動巻線49が通電された時は、駆動電流が可動磁石421の磁界と交差するから、可動磁石421に正又は負の偶力が作用する。その結果、可動体42は強制振動を開始する。
第1の反射ミラー411は、合焦装置2から到来した光ビームを、周期的に反射偏向させる。第2の反射ミラー412は、被読取物T上の飛点(光の移動点)から集光兼偏向手段5CPを経由して到来する反射光を、周期的に反射偏向させて、光電変換器7に向けて射出する。
集光兼偏向手段5CPは、集光レンズと反射プリズムとを、図示の如く、一体に構成したもので良いし、集光レンズと反射プリズムとを互いに別体として構成したものでも良い。
(尚、上記の振動ミラー形走査装置4については、この発明の出願人の出願に係る特願平6−87157号の明細書及び図面に詳細に説明されている。)
【0039】
(第1の実施例の受光光学系) 第1の実施例に使用される受光光学系5について説明する。
図1に戻って、5CPは集光兼偏向手段であって、集光作用と偏向作用とを兼ね備えたものである。
集光兼偏向手段5CPと第2の反射ミラー422(図6(a)参照)とは、共同して、受光光学系5を構成する。
集光兼偏向手段5CPは、被読取物T上の飛点(光の移動点)から到来する反射光を集光すると共に、集光した反射光の進行方向を変換して、第2の反射ミラー412に向けて射出する。第2の反射ミラー412は、到来した反射光を、周期的に反射偏向させて、光電変換器7に入射させる。
この実施例では、集光兼偏向手段5CPの受光口径を拡大することによって、受光光量を増加することが出来る。
【0040】
(第1の実施例の光源) 図1において、2は光源である。光源2としては、例えば、可視光ビームを発光する可視光半導体レーザ、又は、面発光形構造のLEDに極小径のメサ構造を用いたものを使用する。
光源2には、集光レンズを組み込むことが出来る。但し、該集光レンズは、前記の側部光を保存するものでなければならない。
【0041】
(第1の実施例の光源駆動回路) 第1の実施例の光源駆動回路について説明する。
光源2からの投光は、ビーム状光束であるので、バーコードと走査装置の距離が変化してもバーコードに入射する光パワーは変化しない。受光レンズに入射するバーコード面上からの反射光は、その距離により変化し、受光口径が一定の場合、受光光量はバーコードからの距離の2乗に反比例する。
測距により得られた距離データをもとに、投光光出力を制御すると、バーコードからの距離が変化しても受光量を一定に保つ事ができる。(但し、最大出射出力は、光放射安全規格等により制限される事がありる。)
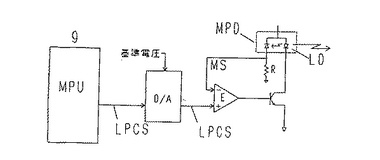
【0042】
図17は、光源駆動回路2Dのブロック図である。この図は、光源にレーザダイオードを用いた場合である。
レーザダイオードLDから発光した光の一部は、光出力を観測する為のモニタ用ホトダイオードMPDに入射する。モニタ用ホトダイオードMPDは、レーザダイオードLDの発光出力に比例したモニタ電流を発生する。モニタ電流は抵抗Rで電圧信号ECに変換され、エラー増幅器Eの−端子に入力される。
エラー増幅器Eの+端子には、光出力制御電圧LPCSが入力される。
このモニター電圧ECは、エラー増幅器Eで光出力制御電圧LPCSと比較され、同一電圧となる様、レーザの発光出力が制御される。
上記の光出力制御電圧LPCSは、例えば集中制御装置(例えばマイクロプロセッサユニット)9から送出された光出力制御信号(論理値)が、DAコンバータD/Aによってアナログ量に変換されてなるものである。
【0043】
(第1の実施例の温度補償装置)
図1において、TSは温度センサである。温度センサTSの温度測定信号を用いて、合焦装置3及び光源駆動回路2Dの温度補償を行うことが出来る。
温度センサTSとしては、温度特性が既知な感温素子(例えばサーミスタ、ダイオードなど)が利用できる。
サーミスタは、温度によって抵抗値が変化する素子であるから、その抵抗値を抵抗電圧変換回路により電圧値に変換し、その電圧値をA/Dコンバータでディジタル信号に変換してから、集中制御装置(例えばマイクロプロセッサユニット)9に入力する。
合焦装置3の合焦レンズ位置サーボ回路34に対して、例えば温度測定信号に比例する信号を加算(減算)することが出来る。これによって、温度変動に伴う焦点の変動を防止することが出来る。その結果、合焦レンズとして、プラスチック製レンズの使用が可能となる。
又、光源駆動回路2Dに対して、例えば温度測定信号に比例する別の信号を加算(減算)することが出来る。これによって、受光光量に対する温度変動の影響が除去される。
【0044】
(第2の実施例)
この出願の発明による光学的情報読取装置の第2の実施例について説明する。
第2の実施例は、第1の実施例に可変絞り装置を付加したものに相当する。
図7(a)は、第2の実施例に使用する第1の可変絞り装置の動作原理図である。
図7(a)において、2は光源、31は合焦レンズ、I1は可変円形絞り、ICは絞り制御回路である。
上記の可変円形絞りI1と、絞り制御回路ICと、図示しない円形絞り駆動機構とは、共同して、第1の可変絞り装置10を構成する。
可変円形絞りI1及び円形絞り駆動機構の構造と機能は、例えばカメラの分野において公知のものと同様である。可変円形絞りI1の開口(アパーチャ)形状は、開口口径が変化しても変化せず、常に円形である。
絞り制御回路ICは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受けて、絞り制御信号に変換し、円形絞り駆動機構に印加する。
円形絞り駆動機構は、絞り制御信号に基づいて、可変円形絞りI1の開口口径を調節する。
回動調節後の可変円形絞りI1の開口口径は、距離信号の1次関数となる。
【0045】
図7(b)は、第2の実施例に使用する第2の可変絞り装置の動作原理図である。
図7(b)において、2は光源、31は合焦レンズ、I2は可変平行四辺形絞り、ICは可変平行四辺形絞り制御回路である。
上記の可変平行四辺形絞りI2と、絞り制御回路ICと、図示しない平行四辺形絞り駆動機構とで、第2の可変絞り装置10を構成する。
可変平行四辺形絞りI2及び平行四辺形絞り駆動機構の構造と機能は、例えばカメラの分野において公知のものと同様である。可変平行四辺形絞りI2の開口は、横幅(短辺長)だけが変化する。
絞り制御回路ICは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受けて、絞り指令信号に変換し、平行四辺形絞り駆動機構に印加する。平行四辺形絞り駆動機構は、絞り指令信号に基づいて、可変平行四辺形絞りI2の開口の横幅(短辺長)だけを調節する。
回動調節後の可変円形絞りI2の開口口径は、距離信号の1次関数となる。
【0046】
可変絞り装置の有用性について、更に詳細に説明する。
図9は、合焦レンズ通過後のレーザビームの縦断面図である。但し、レーザ光はガウシアン分布を有するものとする。
図9において、31は合焦レンズであり、ωdは合焦レンズ31の出射点におけるレーザビームの半径(=合焦レンズの半径)、ωOはビームウエスト半径、ZOは合焦レンズ31の出射点からビームウエスト位置までの距離である。
このとき、ビームウエスト半径ωO及び直径2ωOは、次式で表わされる。
ωO= λZO/(πωd) (15)
2ωo=2λZO/(πωd) (15′) 但し、λはレーザ光の波長。
【0047】
いま、合焦レンズ31の出射点におけるレーザビームの半径ωdも一定、波長λも一定であるとすると、ビームウエスト半径ωo(及び直径2ωO)は、ビームウエスト距離ZOの1次関数となる。
式(15′)をグラフ化すれば、図10の直線1の通りとなる。
但し、図10には、便宜上、三つの座標系を記載してあるから、曲線1は、距離ZOを横軸、ビームウエスト直径2ωOを縦軸をとする座標系(ZO−2ωO座標系)上の直線であることに注意されたい。
図10の直線1から明らかなように、ビームウエスト位置が遠点ZOFにあるときは、ビームウエスト径2ωOFは太く、ビームウエスト位置が近点ZOCにあるときは、ビーム径2ωOCは細い。
【0048】
ビームウエスト半径ωOは、式(8)から明らかなように、レーザ光源の波長λ、レンズの口径(2ωd)、及びビームウエスト位置ZOの選定で決まる。
一般には、所定の遠点ZOFに自動合焦した時に、ビームウエスト半径ωOが、所望の値ωOFとなる様に、ωdを選択する。
そうすると、近点ZOCに自動合焦した時には、ビームウエスト径2ωOCは、図10の直線1から明らかなように、所望のビームウエスト径よりも大分小さく(細く)なって仕舞う。即ち、(ZOF/ZOC)の1になって仕舞う。その結果、近点ZOCにおける光学解像度が必要以上に上り過ぎて、読取データ以外のソイズ(紙面よごれ、印刷むら等)までも検出して仕舞い、信号のS/Nを悪化させて仕舞う虞がある。
【0049】
しかしながら、第2の実施例では、合焦レンズ31の前位又は後位に、図7の如く、可変絞りIを配設したから、合焦レンズ31を近点ZOCに合焦するときには、並行して可変絞りIをも自動的に調節し、ωdを小さくすることによって、ビームウエスト半径ωOCを大きくし、以って上記のS/N比の悪化を防止することが出来る。
図11は、可変絞り通過後のレーザビームのウエスト位置及び直径を示すグラフであるが、同図の曲線2の極小値、即ち合焦レンズ31を近点ZOCに合焦した時のビームウエスト径2ωOCは、図10の曲線2のそれに比べて、遥かに大きく(太く)なっており、所望の値(要求値)2ωOFに近付いていることが解る。
【0050】
図9に戻って、ωZはビームウエスト位置から距離Z離れた点におけるレーザビームの半径である。
上記のレーザビームの半径ωZ及び直径2ωZは、次式で与えられる。
ωZ2 = ωO2{1+(λ/(πωO2))2Z2} (16)
(2ωZ)2=4ωO2{1+(λ/(πωO2))2Z2} (16′)
ビームウエストが任意の近点ZOCにある場合について、式(9′)をグラフ化すれば、図10の曲線2の通りとなる。図10には、前述の如く、便宜上三つの座標系を記載してあるのであるが、曲線2は、近点ZOCを原点とし、近点ZOCからの距離Zを横軸とし、レーザビーム直径2ωZを縦軸をとする座標系(即ち、Z−2ωZ座標系)上の曲線である。
【0051】
又、ビームウエストが任意の遠点ZOFにある場合について、式(16′)をグラフ化すれば、図10の曲線3の通りとなる。曲線3は、遠点ZOFを原点とし、遠点ZOFからの距離Zを横軸とし、レーザビーム直径2ωZを縦軸とする座標系(即ちZ−2ωZ座標系)上の直線である。
(ついでながら、レーザビームの直径2ωZを、合焦レンズ31の出射点を原点とする空間座標zの関数として表現したいときは、式(16′)にに対して、例えば、次式を代入すれば良い。
(ビームウエストが近点ZOCにあるとき) Z=z−ZOC (17)
(ビームウエストが遠点ZOFにあるとき) Z=z−ZOF (17′)
但し、z=0(原点)は合焦レンズ31の出射点、z=ZOCは近点、z=ZOFは遠点である。)
【0052】
図10の曲線2から明らかなように、合焦レンズを近点ZOCに自動合焦した時は、ビーム径2ωZが近点ZOCの前後で急激に増大する(太くなる)ため、自動焦点制御の精度向上が必要となる。しかしながら、合焦レンズ31から被読取物までの距離z(ZOC+Z)は、走査ビームの偏向につれて速い周期で変化し、又被読取物面が湾曲しているときにも同様に速い周期で変化するから、こうした変化に自動焦点制御動作を追従させることは困難である。そのため光学解像度が変化し易い。
【0053】
しかしながら、第2の実施例では、前述の如く、合焦レンズ31の前位又は後位に、図7の如く、可変絞りIを配設したから、合焦レンズ31を近点ZOCに合焦するときは、並行して可変絞りIをも自動的に調節し、ωdを小さくすることによってビームウエスト半径ωOCを相対的に大きく(太く)するから、式(9)及び(9′)の各右辺の中括弧{}内における変数Z2の係数
(λ/(πωOC2))2
が小さくなり、従って近点ZOCの前後でのωZ2の変化が緩慢となり、ビーム半径ωZの変化(立上り)も緩慢になる。
図11によれば、曲線2の曲率が、図10の曲線2のそれに比べて、遥かに小さくなっていることが解る。
以上要するに、第2の実施例では、自動合焦装置の使用に伴って近点におけるビームウエスト径が細くなり過ぎる事態を回避すると共に、ビーム走査や被読取物表面の湾曲に起因する光路長の変化に基づく光学解像度の変化を、軽減することが出来る。
第2の実施例のその余の事項は、第1の実施例と同様である。
【0054】
(第3の実施例)
この出願の発明による光学的情報読取装置の第3の実施例について説明する。
第3の実施例は、第1の実施例における合焦装置を下記のものに置換すると共に下記の可変絞り装置を付加したものに相当する。
図8は,第3の実施例に使用する合焦装置3及び可変絞り装置の動作原理図である。
図8において、2は光源、3Hは円筒形合焦レンズホルダ、FSは送りねじ、g1は第1の歯車、g2は第2の歯車、Mは電動モータ、33は合焦レンズ位置移動手段、I3は可回転長方形絞り、MCは合焦レンズ位置制御回路兼長方形絞り回動角制御回路である。
【0055】
送りネジFSは、円筒形合焦レンズホルダ3Hの外周面に雄ネジとして形成され、図示しない鏡筒3Bの内周面に形成した雌ネジに螺合される。(或は、この関係を逆にして、合焦レンズホルダ3H側に雌ネジを、鏡筒3B側に雄ネジを形成するようにしても良い。)両ネジは、共同して、送り機構FMを構成する。
第1の歯車g1は、回転軸を介して電動モータMに速結され、第2の歯車g2は、円筒形合焦レンズホルダ3Hの一端面(又は外周面)に対して同軸的に結合される。第2の歯車g2には光ビームを通過させるための貫通孔が穿設される。両歯車g1、g2は、共同して、歯車機構(g1,g2)を構成する。
(第2の歯車g2と円筒形合焦レンズホルダ3Hとは一体又は別体に構成することができる。)
【0056】
送りねじ機構FMと、歯車機構(g1,g2)と、電動モータMと、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCとは、共同して、合焦レンズ位置移動手段33を構成する。
合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCは、測距装置6からの距離信号を、直接又はマイクロプロセッサ9を介して受信し、合焦レンズ位置指令信号兼長方形絞り回動角指令信号に変換して、電動モータMに印加する。
合焦レンズ位置制御指令信号兼長方形絞り回動角制御信号は、距離信号の1次関数となる。
電動モータMは合焦レンズ位置制御信号に従って回動する。電動モータMの回動運動は、歯車機構(g1,g2)を介して、円筒形合焦レンズホルダ3Hに伝達され、送り機構FMによって、軸方向の直線運動に変換される。
移動調節後の合焦レンズ31の位置は、距離信号の1次関数となる。
(歯車機構(g1,g2)の歯数比と、送りねじFSのピッチとは、距離信号の比例係数に反映される。)
【0057】
可回動長方形絞りI3は、回動可能な板体からなり、中心部に長方形の開口を有する。可回動長方形絞りI3は、第2の歯車g2又は合焦レンズホルダ3Hに対して、同心的に結合される。(三者は、一体又は別体に構成される)。
可回動長方形絞りI3と、歯車機構(g1,g2)と、電動モータMと、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCとは、共同して、可回動長方形絞り装置10を構成する。
半導体レーザ光源からの光ビームは断面形状が元もと縦長であるから、可回動長方形絞りI3への入射光ビームの断面形状寸法を、可回動長方形絞りI3の開口形状寸法と同程度にすることができる。
【0058】
このとき、回動転長方形絞りI3を通過してなる光ビームの断面形状寸法は、可回動長方形絞りI3の回転角度に依存し、長方形の開口が水平の時に最小、垂直の時に最大となる。即ち、可回動長方形絞りI3を通過した光ビームの断面形状は、光ビーム断面と開口断面との共通部分(重なり合った部分)からなる形状と同一である。
可回動長方形絞りI3は、歯車機構(g1,g2)に連結されているから、合焦レンズ位置制御回路兼長方形絞り回動角制御回路MCからのレンズ位置制御信号兼長方形絞り回動角制御信号に従って回動する。
回動調節後の長方形開口の位置(角度)は、距離信号の1次関数となる。
(歯車機構(g1,g2)の歯数比は、距離信号の比例定数に反映される。) 第3の実施例に使用する可変絞り装置の有用性は、第2の実施例におけるそれと同様である。
第3の実施例のその余の事項は、第1の実施例と同様である。
【0059】
(第4の実施例)
この出願の発明による光学的情報読取装置の第4の実施例について説明する。
第4の実施例は、第1の実施例における振動ミラー形走査装置と受光光学系とを下記のもので置換してなるものに相当する。
図12中には、第4の実施例の全体構成を示す図である。
図12において、4は振動ミラー形走査装置、5は受光光学系である。
その余の要素2〜3、6〜9は、図1の要素と同様である。
【0060】
(第4の実施例の振動ミラー形走査装置)
図3は、第4の実施例に使用する振動ミラー形走査装置を示す図で、(a)は水平断面図、(b)は正面図、(c)は側面図である。
図13において、411は反射ミラー、42は可動部、46はホルダ、47は固定継鉄、49は駆動巻線である。
第1の実施例に対する、第4の実施例の、構成の差違について説明する。
固定継鉄47の形状は、略コの字形である。略コの字形は、略口の字形の一辺を削除してなる形状である。
固定継鉄7の一対の対辺〜471,472は、典型的には直線状であるが、緩やかな曲線状とすることも出来る。
【0061】
可動部42は、可動部本体と回動軸425とを含有する。
可動部本体は、固定継鉄47の1対の対辺471,472の間に、且前面寄り(開放端寄り)に配設される。
可動部本体と固定継鉄47とは、略口の字形の磁気回路を構成する。
回動軸425は、固定継鉄47を含む平面に対して、垂直に配設される。
駆動巻線49,49はそれぞれ、固定継鉄47の1対の対辺471,472の前面寄りに巻回される。
唯一の反射ミラー(走査用ミラー)411は可動部42の前面に固定される。
第4の実施例のその余の構成は、第1の実施例と同一である。
【0062】
(第4の実施例の受光光学系)
第4の実施例に使用する受光光学系について、説明する。
図12に戻って、受光光学系5は、ありきたりの集光レンズからなる。
集光レンズ5を通過した反射光は、直接無媒介的に光電変換器7に入射する。
第4の実施例のその余の事項は、第1の実施例と同様である。
【0063】
(第5の実施例)
この出願の発明による光学的情報読取装置の第5の実施例について説明する。
第5の実施例は、第4の実施例における受光光学系5を、合焦装置3の近傍に移動させると共に、振動ミラー形走査装置の反射ミラーを、受光用ミラーとしても利用する様にしたものに相当する。
第5の実施例は、第1〜第4の実施例に比べて、受光光量が若干減少する。
第5の実施例のその余の事項は、第4の実施例と同様である。
【0064】
(第6の実施例)
この出願の発明の第6の実施例について説明する。
この出願の発明の第6の実施例は、第1の実施例における測距装置を下記の測距装置で置換したものに相当する。
図5は、この出願の発明の第6の実施例に使用する測距装置6の原理説明図であって、同図(a)はその平面図(装置の上方から見た図)、同図(b)はその側面図(装置の側方から見た図)、同図(C)は同測距装置6に使用する測距用光電変換器6Sとその接続関係を示す図である。
【0065】
図5(a)〜(c)において、2は光学情報読取用光源、41は振動ミラー、6Lは測距用受光レンズ、6Sは測距用光電変換器、6Aは差動増幅器である。
測距用光電変換器6Sに付された符号uは、測距用光電変換器6Sの上方向を示す。
符号1T,2T,及び3Tは,被読取物T(図示しない。)の代表的な位置を示し、符号1S,2S,及び3Sは、これらの位置に対応する、反射光からなる走査線(飛点の軌跡)の位置を示す。
被読取物Tが2Tから3Tに移動すると(即ち、近付くと)、反射光からなる走査線の軌跡は、2Sから3Sに移動する(即ち、下方に移動する)。このことは、図5(b)を参照することによって、容易に理解することが出来る。
反対に、被読取物Tが2Tから1Tに移動すると(遠ざかると)、走査線の軌跡は、2Sから1Sに移動する(上方に移動する)。このことも、同様にして、理解することが出来る。
【0066】
測距用光電変換器6Sは、二つの受光領域A及びBからなる。受光領域A及びBの形状は、図5(C)の如く、正方形乃至長方形を1本の斜線によって2等分してなる形状である。正方形乃至長方形を対角線に沿って分割した場合は、領域A及びBの形状は直角3角形、そうでない場合は、台形となる。
二つの領域A及びBは、電気的に絶縁されている。両領域の光電流出力IA、IBは、走査線(飛点)が表面を通過する時間(距離)に比例する。
測距用光電変換器6Sの上下方向の長さを2c、中心から走査線の軌跡までの距離をd(−c≦d≦c)とすると、走査線(飛点)が領域Aを通過する時間は(c−d)に比例し、領域Bを通過する時間は(c+d)に比例するから、
IA=p(c−d)
IB=p(c+d)
となる。
【0067】
但し、pは比例定数(光の強度に依存する)である。
一方の領域Aは、差動増幅器6Aの+端子に接続され、他方の領域Bは、差動増幅器6Aの−端子に接続される。出力端子には差電圧信号VXが得られる。
VX=−2Apd (18)
但し、Aは差動増幅器6Aの利得。
走査線が図5(c)の線2S上を通過するときは、領域Aの出力VAと領域Bの出力VBとが同一となるから、差動増幅器6Aの出力VXは、ゼロとなる。
走査線が線3S上を通過するとき(被読取物Tが近点寄りにあるとき)は、領域Aの出力VAが領域Bの出力VBよりも小となるから、差動増幅器6Aの出力VXは、負の値となる。
走査線が線1S上を通過するとき(被読取物Tが遠点寄りにあるとき)は、領域Aの出力VAが領域Bの出力VBよりも大となるから、差動増幅器6Aの出力VXは、正の値となる。
このとき、dの符号が負となって、d=−|d|となる。
上式を書き換えれば、次式が得られる。
d=−VX/2Ap (18′)
【0068】
三角測量の理論を利用するため、測距用受光レンズ6Sを横切る基線BLを考える(図5(b)参照)。そして、基線BL(測距用受光レンズ6L)から被読取物Tまでの距離をDX、走査中心線から測距用受光レンズ6Lまでの基線BL上の距離をe、基線BL(測距用受光レンズ6L)から測距用光電変換器6Sのまでの距離をf、測距用受光レンズ6Lの光軸から測距用光電変換器6Sの一端(u側端部)までの距離をbとする。
受光光量が略一定値に制御されているときは、被読取物Tまでの距離DXは、次式によって与えられる。
DX=ef/(b+c−VX/2Ap) (19)
【0069】
上記の式(19)の導出過程は、下記の通りである。
図5(b)によれば、高さがDXで底辺がeなる直角三角形と、高さがfで底辺が(b+c+d)なる直角三角形を考えることが出来る。両者は、その斜辺が1個同一の線分3′上にあるから、明らかに相似である。相似の理論によれば、
DX/e=f/(b+c+d)
∴DX=ef/(b+c+d) (20)
式(20)に、式(18′)を代入すると、前記の式(19)が得られる。
測距用光電変換器6Sから差動増幅器6Aへの接続極性を逆にしたときは、式(19)の代りに、次式が使用される。
DX=ef/(b+c+VX/2Ap) (19′)
【0070】
光源の輝度が制御されることなく一定ならば、受光光量は、距離の自乗に反比例する。この場合の光電流IA、IBは、下記の通りとなる。
IA=p(c−d)(DO/DX)2
IB=p(c+d)(DO/DX)2
∴ VA=Ap(c−d)(DO/DX)2
VB=Ap(c+d)(DO/DX)2
但し、Aは増幅器の利得。
VA及びVBの和及び差を計算すると、
VA−VB=−2Apd(DO/DX)2
VA+VB= 2Apc(DO/DX)2
辺同士で割り算を行って、Ap及び(DO/DX)を消去すれば、
(VA−VB)/(VA+VB)
=VX/(VA+VB)=−d/c
∴ d=−cVX/(VA+VB) (21)
上式を、式(20)に代入すれば、次式が得られる。
DX=ef/{b+c−cVX/(VA+VB)} (22)
(因みに、受光光量が略一定値に制御されているときは、
VA+VB=2Apcとなり、式(22)は、式(19)と一致する。)
【0071】
(第7の実施例) この出願の発明の第7の実施例について説明する。
この出願の発明の第7の実施例は、第1の実施例における測距装置を下記の測距装置で置換したものに相当する。
図16は、第7の実施例に使用する測距装置の入力回路のブロック図である。
図16において、2はバーコード読取走査用の光源、2Dは光源駆動回路、6Sは測距用光電変換器、9は集中制御装置(例えば、マイクロプロセッサユニット)である。
第7の実施例においても、測距用の投光光源は、バーコード読取走査用の光源(例えばレーザ)2が利用される。
【0072】
第7の実施例に使用される、測距用光電変換器6Sは、原理的には、第1の実施例に使用された合焦レンズ位置検出用光電変換器32PS(図2、3、15参照)と同一であって、図示の如く、細長形状の受光面と、第1の光電流出力端子t1と、第2の光電流出力端子t2と、共通電極とを具有する。
第1及び第2の光電流出力は、受光面への光点の入射位置によって異なる。
いま、受光面の長さを2c、受光面の中心位置から光点の入射位置までの距離をdとすると、両電流の比は、次の通りである。
I2/I1=(c+d)/(c−d)
=(1+d/c)/(1−d/c) (23)
式(23)の導出過程は、次の通りである。
第1の出力端子t1からの第1の光電流I1は、光点の入射位置から第2の出力端子t2までの距離に比例する。この距離は、(C/2−d)であるから、
I1=p(C−d) (24)
但し、pは比例定数(但し、受光光量には依存する)。
同様に、第2の光電流I2は、光点の入射位置から第1の出力端子t1までの距離に比例する。この距離は、(C/2+d)であるから、
I2=p(C+d) (25)
式(25)を式(24)で除して比例定数pを消去すれば、式(23)が得られる。
【0073】
第7の実施例においても、振動ミラー形走査装置4、被読取物T、及び測距用受光レンズ6Lが使用されるが、それらは第1の実施例と同様である。
第7の実施例の測距用光電変換器6Sは、前述の如く、第1、第6の実施例のものとは相違するが、その配置関係は、第6の実施例(図5(b)参照)と同様である。即ち、第7の実施例の測距用受光レンズ6L及び測距用光電変換器6Sは、基線D上に配設される。(図示は省略する。) 第7の実施例による測距時には、振動ミラー41を停止させ、基線Dに直角な方向(走査の中心方向、θ=0゜の方向)に投光する。
この間、各種の制御装置は、測距装置6の受光感度を上げるために、可能な限り、投光ビームは平行光、絞りは開放、発光出力は最大とするように、動作せしめられる。(但し、発光出力は、光放射の安全規格等で制限された範囲内に止めなければならない。)
被読取物Tからの反射光Lは、測距用受光レンズ6Lによって集光され、測距用光電変換器6Sの受光面上に結像せしめられる。そして、第1の出力端子t1に第1の光電流I1を、第2の出力端子t2に第2の光電流I2を発生させる。
【0074】
第1、第2の光電流I1、I2はそれぞれ、電流電圧変換器I−Vによって電圧信号V1、V2に変換される。電圧信号V1、V2はそれぞれ、可変増幅器AMPによって増幅され、サンプルホールド回路S/Hに入力される。
投光光源2は、光源駆動回路2Dにより駆動される。その光量は集中制御装置(例えばマイクロプロセッサユニット)9からの光出力制御信号LPCSによって制御される。投光光源2の点灯(消灯)は、点灯(消灯)指令信号LOSによって制御される。
測距動作中は、周囲光の影響を排除するために、光源2はパルス駆動される。実際の点灯時間は、測定一回当り10〜1000マイクロ秒程度である。この時間は、投光光源2及び受光回路のパルス応答速度特性に依拠して、最適値に決定される。
【0075】
第1、第2の出力端子には、投光光源2の消灯時でも、周囲光によって、電流I1of、I2ofが発生する。
周囲光に由来する電流成分I1of、I2ofの影響を排除するために、消灯時の電圧V1of、V2ofは、AD変換器A/DによってそれぞれAD変換され、ディジタルデータとして、集中制御装置(例えば、マイクロプロセッサユニット)9に入力される。
その直後に、集中制御装置(例えばマイクロプロセッサユニット)9は、点灯指令信号LOSを発して、投光光源2を点灯させる。
第1、第2のサンプルホールド回路S/H、S/Hはそれぞれ、点灯指令信号LOSに同期して、点灯時の電圧信号V1ON,V2ONをサンプルしホールドする。それらの電圧信号V1ON,V2ONは、AD変換器A/DによってそれぞれA/D変換され、ディジタルデータとして、集中制御装置(例えばマイクロプロセッサユニット)9に入力される。
【0076】
集中制御装置(例えばマイクロプロセッサユニット)9の内部には各電圧データが論理値としてストアされているので、次からの演算が容易に実行できる。
点灯時の電圧データV1ON、V2ONから、消灯時の電圧データV1of、V2ofを減算して、真の測距データV1t,V2tを計算する。即ち、
V1t=V1ON−V1of
V2t=V2ON−V2of
両式から、V2t/V1tを算出する。即ち、
V2t/V1t=(V2ON−V2of)/(V2ON−V2of) (26)
V2t/V1tは、前記の式(23)中のI2/I1に相当する。
そこで、上式(26)を,前記の式(23)中のI2/I1に代入することによって、測距値DXを計算できる。
(V2ON−V2of)/(V2ON−V2of)
=(1+d/c)/(1−d/c) (27)
【0077】
集中制御装置(マイクロプロセッサユニット)9の内部における上記の計算は通常100μsec以下でできる。
測定精度を向上させる為に、前記の測定シーケンスを繰り返し、平均値を出力する。繰り返し回数は通常10〜20回である。したがって、1回当りの測定時間は通常1msec以下である。
測定精度を良くする為には、投光光量を上げる必要があるが、そこに制限があるのは、前述の通りである。
【0078】
また、A/Dコンバーターの量子化精度を上げる為、点灯時データV1ONおよびV2ONが共に小さな値であった場合、集中制御装置(マイクロプロセッサユニット)9は増幅率切替信号ACSにより、増幅率を増加させ、最適な入力値となる様にしてから測定シーケンスをやり直す。
逆に、点灯時データV1ONまたはV2ONがA/Dコンバータの最大入力値を超えている場合、集中制御装置(マイクロプロセッサユニット)9は、増幅率切替信号ACSにより増幅率を低減してから、測定シーケンスをやり直す。
これらは、測距距離DXが大きく変わると、受光できる反射光の強度が変わる為である。
【0079】
(第8の実施例) この出願の発明の第8の実施例について説明する。
この出願の発明の第8の実施例は、第1の実施例の合焦装置3における合焦レンズ位置検出手段32を下記の合焦レンズ位置検出手段で置換したものに相当する。
光源(例えばレーザ)2の光軸から角度φだけ離れた方向の光(即ち側部光)の強さは、角φの減少関数である。
そのため、合焦レンズ位置検出用ポジションレンズ32PLの受光面が、前方に移動すれば(合焦レンズ31のx座標が増大すれば)受光光量が増大し、後方に移動すれば(合焦レンズ31のx座標が減少すれば)、受光量は減少する。即ち、合焦レンズ31が前方に移動すれば、合焦レンズ位置検出用光電変換素子32PSの出力が増大し、合焦レンズ31が後方に移動すれば、上記光電変換素子32PSの出力が減少する。
即ち、合焦レンズ位置検出手段32の出力(位置検出信号)は、合焦レンズ31のx座標の単調増加関数である。
それ故、上記単調増加関数の逆関数を求めることによって、合焦レンズ31のx座標を求めることが出来る。
【0080】
(その他の実施例) その他の実施例について説明する。
その他の実施例は、前記の諸実施例中の諸事項と、以下の諸事項とを組み合わせることによって、生成される。
(イ)第1の実施例の合焦装置3の合焦レンズ位置検出手段32における、合焦レンズ位置検出用光電変換器32PSは、多数の光電変換素子と位置検出用演算回路とで構成することが出来る。
(ロ)第1の実施例の振動ミラー形走査装置4における駆動手段は、圧電形電気機械変換器で構成することが出来る。
(ハ)第1の実施例の合焦装置3における合焦レンズ移動手段33は、可動鉄片形として構成することが出来る。
(ニ)集中制御装置9をASICで構成することができる。
(ホ)各実施例における電子回路部分を、集中制御装置9と共にIC化し、システム・オン・チップとすることが出来る。
【産業上の利用可能性】
【0081】
この出願の発明は、以上の様に構成したから、下記(a)〜(1)の通り、顕著な作用効果を奏することが出来る。
(a)被読取物が遠点にあったり近点にあったりして読取距離が一定していない時でも、光学的情報を正確に読み取ることが出来る、超長読取深度の光学的情報読取装置を実現することが出来る。別言すれば、読取範囲の非常に大きな光学的情報読取装置を実現することが出来る。
(b)小形、軽量、且低コストの合焦装置及び測距装置を実現することが出来る。これによって、全体としても小形、軽量、且低コストの光学的情報読取装置を実現することが出来る。
(c)小形、軽量、且低コストの合焦装置及び測距装置を搭載した、手持式光学的情報読取装置を実現することが出来る。
【0082】
(d)合焦装置に対して、可変絞り装置を付加することによって、被読取物Tが近点にある時は、ビームウエストの細くなり過ぎによる解像度の上り過ぎを防止し、被読取物Tが遠点にある時は、ビームウエストの太くなり過ぎによる解像度の下がり過ぎを防止し、以って超長深度に亙って解像度を適正範囲に維持すると共に、被読取物Tが近点にある時に、近点の前後におけるビーム径の急激な増加を防止し、以って、走査ビームの偏向に伴う解像度の変動を防止して、S/N比を大幅に向上させた光学的情報読取装置を実現することが出来る。
(e)光源の輝度(従って光量)を、距離測定信号及び/又は走査角信号の1次関数に基づいて、制御することによって、光電変換器7の受光光量を適正範囲に維持した、光学的情報読取装置を実現することが出来る。
(f)前面に走査ミラー、後面に受光ミラーを有する振動ミラー形走査装置を使用することによって、即ち後面の受光ミラーを受光専用に利用することによって、受光口径を大きくし、従って受光光量を大きくした、光学的情報読取装置を実現することが出来る。
【0083】
(g)測距データを用いて、走査角を調節することによって、近点でも遠点でも必要な読幅を確保することが出来る。
(h)測距データを用いて、レーザ光パワを制御することによって、受光利得および視認性の安定化を計ることが出来る。
(i)測距データを用いて、受光利得を制御することによって、受光利得の安定化に寄与することが出来る。
(j)測距データを用いて、走査速度を調節することによって、電気的アナログ信号の周波数帯域を制御することが出来る。
(k)走査角データを用いて、レーザ光パワ又は受光利得を調節することによって、走査両側の受光光量の低下を補償することが出来る。
(1)走査角データを用いて、走査中央と両側との光路差による合焦物のずれを補正することが出来る。
【図面の簡単な説明】
【0084】
【図1】この出願の発明による光学的情報読取装置の第1の実施例の全体構成を示す図である。
【図2】上記第1の実施例に使用する自動合焦装置の動作原理図である。
【図3】上記自動合焦装置の要部をなす光学的合焦ユニットの縦断面図である。
【図4】上記第1の実施例に使用する第1の測距装置の原理説明図である。
【図5】上記第1の実施例に使用する第2の測距装置の原理説明図である。
【図6】上記第1の実施例に使用する振動ミラー形走査装置の水平断面図及び垂直断面図である。
【図7】この出願の発明による光学的情報読取装置の第2の実施例に使用する可変絞り装置の動作原理図である。
【図8】この出願の発明による光学的情報読取装置の第3の実施例に使用する合焦装置及び可変絞り装置の動作原理図である。
【図9】合焦レンズ通過後のレーザビームの縦断面図である。
【図10】固定絞り通過後のレーザビームのウエスト位置及び直径を示すグラフである。
【図11】可変絞り通過後のレーザビームのウエスト位置及び直径を示すグラフである。
【図12】この出願の発明による光学的情報読取装置の第4の実施例の全体構成を示す図である。
【図13】上記第4の実施例に使用する走査式振動ミラー形走査装置を示す図である。
【図14】合焦レンズによる光の集光位置を示す図である。
【図15】合焦レンズ位置制御回路のブロック図である。
【図16】この出願の発明の第7の実施例に使用する測距装置の入力回路のブロック図である。
【図17】光源駆動回路のブロック図である。
【図18】従来の自動焦点形スキャナの動作原理図である。
【図19】従来の自動焦点形スキャナを利用した物流仕分けシステムの斜視図である。
【符号の説明】
【0085】
1 筐体
2 光源
2D 光源駆動装置
3 自動合焦装置(自動収束系)
31 合焦レンズ
32 合焦レンズ位置検出手段
32PL 合焦レンズ位置検出用ポジションレンズ
32PS 合焦レンズ位置検出用光電変換器(素子)
32PC 合焦レンズ位置演算回路
33 合焦レンズ移動手段
33C 可動線輪(励磁線輪)
33CD 合焦レンズ位置駆動回路
33M 永久磁石
33Y 継鉄(ヨーク)
34 合焦レンズ位置サーボ回路
35 電子的分圧器
3B 鏡筒(バレル)
3H 合焦レンズホルダ
3LL 合焦レンズ位置検出用レーザ光
3SP 支持バネ
3U 光学的合焦ユニット
4 振動ミラー形走査装置
411 第1の振動ミラー(走査用ミラー)
412 第2の振動ミラー(受光用ミラー)
42 可動部
421 可動磁石
422 可動継鉄(ヨーク)
424 磁性体
425 回動軸
46 ホルダ
47 固定継鉄
471固定継鉄の対辺
472固定継鉄の対辺
48 固定磁石
49 駆動線輪
5 受光光学系
6 測距装置(距離計)
6A 差動増幅器
6C 測距用演算手段
6L 測距用受光レンズ
6P 測距用投光器
6R 測距用光電変換器
6s 測距用光電変換素子
6S 測距用光電変換器
7 光電変換器(光電変換器)
8 信号処理部
9 集中制御装置(例えばマイクロプロセッサユニット)
10 可変絞り装置
DS 距離信号
I 可変絞り
IC 可変絞り制御回路
LB レーザビーム M 電動モータ
MC 合焦レンズ位置及び絞り回動角制御回路
MS レーザダイオードの監視信号
p 光学的情報パターン(例えばバーコード記号)
SB 走査ビーム
T 被読取物(例えばラベル)
TS 温度センサ
VD 電子的分圧器
【特許請求の範囲】
【請求項1】
被読取物(T)を走査する光ビームを発出する光源(2)と、
上記光源(2)から発出した上記光ビームを上記被読取物(T)上に合焦させる合焦装置(3)と、
上記光ビームを、水平面内において、周期的に反射偏向させる振動ミラー形走査装置(4)と、
上記被読取物(T)から反射して来た反射光を、所定の位置に、集光する受光光学系(5)と、
上記所定の位置に配設され、上記反射光を電気的アナログ信号に変換する光電変換器(7)と、
上記光電変換器(7)の出力端子に接続された信号処理部(8)と、
上記振動ミラー形走査装置(4)から上記被読取物(T)までの距離を測長する測距装置(6)と、
これらの要素の全部を収納する筐体(1)と
を含有し、
上記振動ミラー形走査装置(4)は、自由振動をすることが可能な振動ミラー(411)と、該振動ミラー(411)を強制振動させることが可能な電磁式駆動手段とからなり、
上記測距装置(6)と上記合焦装置(3)とは、上記測距装置(6)からの距離信号を上記合焦装置(3)に対して位置指令信号として与えるように、接続してなる、
手持ち式光学的情報読取装置。
【請求項2】
前記合焦装置(3)は、
前記光源(2)から発出した光ビームの焦点を前記被読取物(T)上に結ばせるための合焦レンズ(31)と、
上記合焦レンズ(31)を、上記光軸方向にのみ変位可能に支持する、合焦レンズ支持手段(39)と、
上記合焦レンズ(31)を上記光軸方向に移動させることが出来る合焦レンズ移動手段(33)と、
合焦レンズ位置サーボ回路(34)と
を含有し、
上記合焦レンズ位置サーボ回路(34)は、前記位置指令信号を受けて位置制御信号に変換し、前記合焦レンズ移動手段(33)に与えるように、構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【請求項3】
上記合焦レンズ支持手段(39)は、筒状乃至環状の合焦レンズホルダ3Hを含有する、
請求項2記載の手持ち式光学的情報読取装置。
【請求項4】
上記合焦レンズ支持手段(39)は、更に、板状の支持バネを含有する、
請求項3記載の手持ち式光学的情報読取装置。
【請求項5】
前記支持バネは、1対の支持バネ3SP,3SPからなり、上記支持バネ3SP,3SPは、前記合焦レンズホルダ3Hを前後から挟持するような形に配設してなる、
請求項4記載の手持ち式光学的情報読取装置。
【請求項6】
前記合焦装置(3)は、鏡筒(バレル)3Bを含有し、
前記合焦レンズ支持手段(39)は上記鏡筒3B内に収納し、
前記支持バネの周縁部は上記鏡筒3Bの内壁に固定してなる
請求項4記載の手持ち式光学的情報読取装置。
【請求項7】
前記合焦レンズ移動手段(33)は、電磁式駆動機構を含有し、該電磁式
駆動機構は、励磁線輪33Cと、永久磁石33Mと、継鉄(ヨーク)33Yとからなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項8】
前記励磁線輪33C、前記氷久磁石33M、及び前記継鉄33Yは、何れも環状に構成し、且、内側からこの順序で同軸的に配置し、
上記永久磁石33M及び上記継鉄33Yを固定側とし、上記励磁線輪33Cを可動側とし、可動側とした上記線輪33Cを合焦レンズ支持手段(39)に対して直列的に連結してなる
請求項7記載の手持ち式光学的情報読取装置。
【請求項9】
前記合焦装置(3)は鏡筒(バレル)3Bを含有し、
前記電磁式駆動機構は上記鏡筒3B内に収納し、
前記継鉄33Yの周縁部は上記鏡筒3Bの内壁に固定してなる請求項7記載の手持ち式光学的情報読取装置。
【請求項10】
前記合焦装置(3)は、更に、合焦レンズ位置検出手段(32)を含有し、該合焦レンズ位置検出手段(32)は、前記合焦レンズ(31)の光軸方向における位置を検出して位置検出信号を出力するように構成し、
前記合焦レンズ位置サーボ回路(34)は、前記位置指令信号と上記位置検出信号とを受けて、位置制御信号を形成し、上記合焦レンズ移動手段(33)に与えると共に、両信号の差が零となった時に上記合焦レンズ移動手段(33)を停止させるように構成してなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項11】
前記合焦レンズ位置検出手段(32)は、合焦レンズ位置検出用ポジションレンズ(32PL)と、合焦レンズ位置検出用光電変換器(32PS)と、合焦レンズ位置演算回路(32PC)を含有する
請求項10記載の手持ち式光学的情報読取装置。
【請求項12】
上記合焦装置(3)は、合焦レンズホルダ3Hと、鏡筒3Bとを含有し、
前記合焦レンズ位置検出用ポジションレンズ(32PL)は、光源(2)から合焦レンズホルダ3Hの内周部の所定箇所に到達した周辺光を、対応する周壁部を通して外部に導出するために、当該周壁部に埋め込み、
上記ポジションレンズ(32PL)の光軸(延長線)が上記鏡筒3Bの周壁部と交差する位置に貫通孔を穿設して、当該貫通孔内に上記合焦レンズ位置検出用光電変換器(32PS)を配設し、
上記ポジションレンズ(32PL)の集光点と上記光電変換器(32PS)の受光面とを合致させてなる
請求項11記載の手持ち式光学的情報読取装置。
【請求項13】
上記合焦レンズ位置検出用ポジションレンズ(32PL)の断面形状と上記合焦レンズ位置検出用受光器の断面形状とは、何れも縦長形状としてなる、
請求項11又は12記載の手持ち式光学的情報読取装置。
【請求項14】
更に可変絞り手段(10)を含有し、該可変絞り手段(10)は可変絞り(I)と絞り制御回路(IC)とを含有し、
上記可変絞り(I)は、前記合焦装置(3)の前位又は後位に配設し、
上記絞り制御回路(IC)と前記測距装置(6)とは、前記測距装置(6)からの距離信号を、上記絞り制御回路(IC)に対して、絞り指令信号として与えるように、接続してなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項15】
前記可変絞り(I)の絞り孔形状は、平行四辺形をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項16】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも段階的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項17】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも連続的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項18】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも断続的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項19】
前記合焦レンズ移動手段(33)は、送りネジ機構(FM)と、送りネジ機構駆動手段(FD)と、合焦レンズ位置制御回路(MC)とからなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項20】
前記送りネジ機構(FM)は、送りねじ(FS)を含有し、該送りねじ
(FS)は前記合焦レンズホルダ(3H)の外周部に設けてなる、請求項19記載の手持
ち式光学的情報読取装置。
【請求項21】
前記送りネジ機構駆動手段(FD)は、歯車機構(g1,g2)と電動モータ(M)とを含有し、上記歯車機構(g1,g2)は第1の歯車(g1)と第2の歯車(g2)とからなり、
上記第1の歯車(g1)は上記電動モータ(M)に連結し、上記第2の歯車(g2)は前記合焦レンズホルダ(3H)の外周部に結合してなる
請求項19記載の手持ち式光学的情報読取装置。
【請求項22】
更に、可変絞り(I3)を含有し、該可変絞り(I3)は、前記送りネジ機構(FM)と連動するように連結してなる 請求項19記載の手持ち式光学的情報読取装置。
【請求項23】
前記振動ミラー形走査装置(4)は、前記光源(2)から発出した光ビームを反射偏向させるための振動ミラー(411)と、上記振動ミラー(411)を振動させる電磁式駆動手段とからなり、
上記電磁式駆動手段は固定部と可動部(23)とからなり、
上記振動ミラー(411)と上記可動部(23)とは、一体的に構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【請求項24】
前記振動ミラー形走査装置(4)は、
前記光源(2)から発出した光ビームを反射偏向させるための第1の振動ミラー(411)と、
上記第1の振動ミラー(411)の後面に固定した第2の振動ミラー(412)と、
上記第1の振動ミラー(411)及び第2の振動ミラー(412)を振動させる電磁式駆動手段と からなり、
前記受光光学系(5)は、反射偏向手段(5CP)と上記第2の振動ミラー(412)とで構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【請求項1】
被読取物(T)を走査する光ビームを発出する光源(2)と、
上記光源(2)から発出した上記光ビームを上記被読取物(T)上に合焦させる合焦装置(3)と、
上記光ビームを、水平面内において、周期的に反射偏向させる振動ミラー形走査装置(4)と、
上記被読取物(T)から反射して来た反射光を、所定の位置に、集光する受光光学系(5)と、
上記所定の位置に配設され、上記反射光を電気的アナログ信号に変換する光電変換器(7)と、
上記光電変換器(7)の出力端子に接続された信号処理部(8)と、
上記振動ミラー形走査装置(4)から上記被読取物(T)までの距離を測長する測距装置(6)と、
これらの要素の全部を収納する筐体(1)と
を含有し、
上記振動ミラー形走査装置(4)は、自由振動をすることが可能な振動ミラー(411)と、該振動ミラー(411)を強制振動させることが可能な電磁式駆動手段とからなり、
上記測距装置(6)と上記合焦装置(3)とは、上記測距装置(6)からの距離信号を上記合焦装置(3)に対して位置指令信号として与えるように、接続してなる、
手持ち式光学的情報読取装置。
【請求項2】
前記合焦装置(3)は、
前記光源(2)から発出した光ビームの焦点を前記被読取物(T)上に結ばせるための合焦レンズ(31)と、
上記合焦レンズ(31)を、上記光軸方向にのみ変位可能に支持する、合焦レンズ支持手段(39)と、
上記合焦レンズ(31)を上記光軸方向に移動させることが出来る合焦レンズ移動手段(33)と、
合焦レンズ位置サーボ回路(34)と
を含有し、
上記合焦レンズ位置サーボ回路(34)は、前記位置指令信号を受けて位置制御信号に変換し、前記合焦レンズ移動手段(33)に与えるように、構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【請求項3】
上記合焦レンズ支持手段(39)は、筒状乃至環状の合焦レンズホルダ3Hを含有する、
請求項2記載の手持ち式光学的情報読取装置。
【請求項4】
上記合焦レンズ支持手段(39)は、更に、板状の支持バネを含有する、
請求項3記載の手持ち式光学的情報読取装置。
【請求項5】
前記支持バネは、1対の支持バネ3SP,3SPからなり、上記支持バネ3SP,3SPは、前記合焦レンズホルダ3Hを前後から挟持するような形に配設してなる、
請求項4記載の手持ち式光学的情報読取装置。
【請求項6】
前記合焦装置(3)は、鏡筒(バレル)3Bを含有し、
前記合焦レンズ支持手段(39)は上記鏡筒3B内に収納し、
前記支持バネの周縁部は上記鏡筒3Bの内壁に固定してなる
請求項4記載の手持ち式光学的情報読取装置。
【請求項7】
前記合焦レンズ移動手段(33)は、電磁式駆動機構を含有し、該電磁式
駆動機構は、励磁線輪33Cと、永久磁石33Mと、継鉄(ヨーク)33Yとからなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項8】
前記励磁線輪33C、前記氷久磁石33M、及び前記継鉄33Yは、何れも環状に構成し、且、内側からこの順序で同軸的に配置し、
上記永久磁石33M及び上記継鉄33Yを固定側とし、上記励磁線輪33Cを可動側とし、可動側とした上記線輪33Cを合焦レンズ支持手段(39)に対して直列的に連結してなる
請求項7記載の手持ち式光学的情報読取装置。
【請求項9】
前記合焦装置(3)は鏡筒(バレル)3Bを含有し、
前記電磁式駆動機構は上記鏡筒3B内に収納し、
前記継鉄33Yの周縁部は上記鏡筒3Bの内壁に固定してなる請求項7記載の手持ち式光学的情報読取装置。
【請求項10】
前記合焦装置(3)は、更に、合焦レンズ位置検出手段(32)を含有し、該合焦レンズ位置検出手段(32)は、前記合焦レンズ(31)の光軸方向における位置を検出して位置検出信号を出力するように構成し、
前記合焦レンズ位置サーボ回路(34)は、前記位置指令信号と上記位置検出信号とを受けて、位置制御信号を形成し、上記合焦レンズ移動手段(33)に与えると共に、両信号の差が零となった時に上記合焦レンズ移動手段(33)を停止させるように構成してなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項11】
前記合焦レンズ位置検出手段(32)は、合焦レンズ位置検出用ポジションレンズ(32PL)と、合焦レンズ位置検出用光電変換器(32PS)と、合焦レンズ位置演算回路(32PC)を含有する
請求項10記載の手持ち式光学的情報読取装置。
【請求項12】
上記合焦装置(3)は、合焦レンズホルダ3Hと、鏡筒3Bとを含有し、
前記合焦レンズ位置検出用ポジションレンズ(32PL)は、光源(2)から合焦レンズホルダ3Hの内周部の所定箇所に到達した周辺光を、対応する周壁部を通して外部に導出するために、当該周壁部に埋め込み、
上記ポジションレンズ(32PL)の光軸(延長線)が上記鏡筒3Bの周壁部と交差する位置に貫通孔を穿設して、当該貫通孔内に上記合焦レンズ位置検出用光電変換器(32PS)を配設し、
上記ポジションレンズ(32PL)の集光点と上記光電変換器(32PS)の受光面とを合致させてなる
請求項11記載の手持ち式光学的情報読取装置。
【請求項13】
上記合焦レンズ位置検出用ポジションレンズ(32PL)の断面形状と上記合焦レンズ位置検出用受光器の断面形状とは、何れも縦長形状としてなる、
請求項11又は12記載の手持ち式光学的情報読取装置。
【請求項14】
更に可変絞り手段(10)を含有し、該可変絞り手段(10)は可変絞り(I)と絞り制御回路(IC)とを含有し、
上記可変絞り(I)は、前記合焦装置(3)の前位又は後位に配設し、
上記絞り制御回路(IC)と前記測距装置(6)とは、前記測距装置(6)からの距離信号を、上記絞り制御回路(IC)に対して、絞り指令信号として与えるように、接続してなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項15】
前記可変絞り(I)の絞り孔形状は、平行四辺形をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項16】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも段階的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項17】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも連続的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項18】
前記可変絞り(I)の絞り孔形状は、上方及び/又は下方における横幅を中央部における横幅よりも断続的に拡大した形状をなしている、請求項14記載の手持ち式光学的情報読取装置。
【請求項19】
前記合焦レンズ移動手段(33)は、送りネジ機構(FM)と、送りネジ機構駆動手段(FD)と、合焦レンズ位置制御回路(MC)とからなる、
請求項2記載の手持ち式光学的情報読取装置。
【請求項20】
前記送りネジ機構(FM)は、送りねじ(FS)を含有し、該送りねじ
(FS)は前記合焦レンズホルダ(3H)の外周部に設けてなる、請求項19記載の手持
ち式光学的情報読取装置。
【請求項21】
前記送りネジ機構駆動手段(FD)は、歯車機構(g1,g2)と電動モータ(M)とを含有し、上記歯車機構(g1,g2)は第1の歯車(g1)と第2の歯車(g2)とからなり、
上記第1の歯車(g1)は上記電動モータ(M)に連結し、上記第2の歯車(g2)は前記合焦レンズホルダ(3H)の外周部に結合してなる
請求項19記載の手持ち式光学的情報読取装置。
【請求項22】
更に、可変絞り(I3)を含有し、該可変絞り(I3)は、前記送りネジ機構(FM)と連動するように連結してなる 請求項19記載の手持ち式光学的情報読取装置。
【請求項23】
前記振動ミラー形走査装置(4)は、前記光源(2)から発出した光ビームを反射偏向させるための振動ミラー(411)と、上記振動ミラー(411)を振動させる電磁式駆動手段とからなり、
上記電磁式駆動手段は固定部と可動部(23)とからなり、
上記振動ミラー(411)と上記可動部(23)とは、一体的に構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【請求項24】
前記振動ミラー形走査装置(4)は、
前記光源(2)から発出した光ビームを反射偏向させるための第1の振動ミラー(411)と、
上記第1の振動ミラー(411)の後面に固定した第2の振動ミラー(412)と、
上記第1の振動ミラー(411)及び第2の振動ミラー(412)を振動させる電磁式駆動手段と からなり、
前記受光光学系(5)は、反射偏向手段(5CP)と上記第2の振動ミラー(412)とで構成してなる、
請求項1記載の手持ち式光学的情報読取装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2006−4442(P2006−4442A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2005−186988(P2005−186988)
【出願日】平成17年6月27日(2005.6.27)
【分割の表示】特願平6−302594の分割
【原出願日】平成6年11月1日(1994.11.1)
【出願人】(391062872)株式会社オプトエレクトロニクス (70)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成17年6月27日(2005.6.27)
【分割の表示】特願平6−302594の分割
【原出願日】平成6年11月1日(1994.11.1)
【出願人】(391062872)株式会社オプトエレクトロニクス (70)
【Fターム(参考)】
[ Back to top ]