
光学的情報読取装置
【課題】部品点数を削減するとともに組付工数および調整工数をも削減し得る光学的情報読取装置を提供する。
【解決手段】二次元コードリーダでは、光学系ユニット基板16によりマーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるようにマーカ光源28および受光センサ24を支持する。そして、結像レンズ23の光軸JLに対して受光センサ24の受光軸JSがマーカ光源28から離れる方向に「d×n/m」(発光軸JMと光軸JLとの間の距離を光軸間距離d、二次元コードと結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n)で表されるオフセット量fだけ、ずれるように受光センサ24の位置を設定する。
【解決手段】二次元コードリーダでは、光学系ユニット基板16によりマーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるようにマーカ光源28および受光センサ24を支持する。そして、結像レンズ23の光軸JLに対して受光センサ24の受光軸JSがマーカ光源28から離れる方向に「d×n/m」(発光軸JMと光軸JLとの間の距離を光軸間距離d、二次元コードと結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n)で表されるオフセット量fだけ、ずれるように受光センサ24の位置を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光を発する光学的情報読取装置に関するものである。
【背景技術】
【0002】
従来より、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光を発する光学的情報読取装置として、例えば、下記特許文献1の図16に開示されるものがある。
【0003】
この種の光学的情報読取装置では、読取対象に向けてマーカ光を発するマーカ光学系光軸(P)と、読取対象に反射した反射光を受光する受光光学系の読取光軸(O)と、が互いにずれて位置していることから、例えば、当該光学的情報読取装置に適した読取距離で両光軸が交差するように、マーカ光学系を構成する光学素子(6)を結像光学素子(2)の上部にやや斜め下向きに配設している(下記特許文献1;段落0003,0004、図16)。
【特許文献1】特開2006−330987号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、このように構成される光学的情報読取装置によると、受光光学系の読取光軸(O)に対して微小な角度θでマーカ光の光軸(P)を交差する構成を採る必要上、例えば、(1) 受光光学系とマーカ光学系をそれぞれ別の支持部材(例えばプリント配線基板)に取り付けたり、(2) 受光光学系とマーカ光学系を同じ支持部材に取り付ける場合には、いずれか一方に角度θを持たせるためにこのような角度の取付面のあるスペーサ等を介在させて支持部材に取り付ける、ことが余儀なくされていた。
【0005】
このため、上記(1),(2) のいずれの場合においても、部品点数や組付工数が増加するばかりでなく、これらを組み付けた後の工程で、受光光学系の読取光軸(O)とマーカ光の光軸(P)とが角度θで交差するように、少なくとも一方の光軸角度を微小な角度θに調整する調整工数が必要となり、その分の工数が増加するという問題が発生する。
【0006】
本発明は、上述した課題を解決するためになされたものであり、その目的とするところは、部品点数を削減するとともに組付工数および調整工数をも削減し得る光学的情報読取装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、特許請求の範囲に記載の請求項1の光学的情報読取装置では、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を結像レンズを介して受光する受光センサと、前記マーカ光源の発光軸と前記受光センサの受光軸とが平行になるように前記マーカ光源および前記受光センサを支持する支持部材と、を備え、前記マーカ光源の発光軸と前記結像レンズの光軸との間の距離を光軸間距離d、前記情報コードと前記結像レンズの主点との間の距離を物体距離m、前記結像レンズの主点と前記受光センサの受光面との間の距離を結像距離n、とすると、前記受光センサは、前記結像レンズの光軸に対して前記受光センサの受光軸が前記マーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置していることを技術的特徴とする。
【0008】
特許請求の範囲に記載の請求項2の光学的情報読取装置では、請求項1記載の光学的情報読取装置において、前記読取可能な範囲が長方形状をなす場合、前記結像レンズの光軸と前記マーカ光源の発光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを技術的特徴とする。
【0009】
特許請求の範囲に記載の請求項3の光学的情報読取装置では、請求項1または2記載の光学的情報読取装置において、前記支持部材は、前記マーカ光源および前記受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、前記マーカ光源の発光軸および前記受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源および前記受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを技術的特徴とする。
【0010】
特許請求の範囲に記載の請求項4の光学的情報読取装置では、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を第1の結像レンズを介して受光する第1の受光センサと、前記情報コードに反射した反射光を第2の結像レンズを介して受光する第2の受光センサと、前記マーカ光源の発光軸と前記第1の受光センサの受光軸と前記第2の受光センサの受光軸とがそれぞれ互いに平行になるように前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサを支持する支持部材と、を備え、前記マーカ光源の発光軸と前記第1の結像レンズの光軸との間の距離を光軸間距離d1、前記情報コードと前記第1の結像レンズの主点との間の距離を物体距離m1、前記第1の結像レンズの主点と前記第1の受光センサの受光面との間の距離を結像距離n1、とすると、前記第1の受光センサは、前記第1の結像レンズの光軸に対して前記第1の受光センサの受光軸が前記マーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置しており、前記マーカ光源の発光軸と前記第2の結像レンズの光軸との間の距離を光軸間距離d2、前記情報コードと前記第2の結像レンズの主点との間の距離を物体距離m2、前記第2の結像レンズの主点と前記第2の受光センサの受光面との間の距離を結像距離n2、とすると、前記第2の受光センサは、前記第2の結像レンズの光軸に対して前記第2の受光センサの受光軸が前記マーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置していることを技術的特徴とする。
【0011】
特許請求の範囲に記載の請求項5の光学的情報読取装置では、請求項4記載の光学的情報読取装置において、前記読取可能な範囲が長方形状をなす場合、前記第1の結像レンズの光軸と前記第2の結像レンズの光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを技術的特徴とする。
【0012】
特許請求の範囲に記載の請求項6の光学的情報読取装置では、請求項4または5記載の光学的情報読取装置において、前記支持部材は、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、前記マーカ光源の発光軸、前記第1の受光センサの受光軸および前記第2の受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを技術的特徴とする。
【発明の効果】
【0013】
請求項1の発明では、支持部材により、マーカ光源の発光軸と受光センサの受光軸とが平行になるようにマーカ光源および受光センサを支持し、マーカ光源の発光軸と結像レンズの光軸との間の距離を光軸間距離d、情報コードと結像レンズの主点との間の距離を物体距離m、結像レンズの主点と受光センサの受光面との間の距離を結像距離n、とすると、受光センサは、結像レンズの光軸に対して受光センサの受光軸がマーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置している。
【0014】
即ち、情報コードと結像レンズの主点との間の距離を物体距離m、結像レンズの主点と受光センサの受光面との間の距離を結像距離nとすると、情報コード(物体)と受光面上の結像(像)との間の物像距離は、物体距離mと結像距離nとの和(m+n)となり、また結像レンズの倍率は、結像距離nを物体距離mで除した値(n/m)になる。このため、マーカ光源の発光軸と結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離dとすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d×n/m」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0015】
これにより、「d×n/m」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように受光センサを配置することによって、マーカ光源の発光軸と受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。このように「d×n/m」で求められるオフセット量fだけマーカ光源から離れる方向にシフトした位置に受光面が位置するように受光センサを配置することで、マーカ光源の発光軸と受光センサの受光軸とを互いに交差する構成を採る必要がないことから、マーカ光源および受光センサをそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて支持部材に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0016】
請求項2の発明では、読取可能な範囲が長方形状をなす場合、結像レンズの光軸とマーカ光源の発光軸とを結ぶ仮想線は、読取可能な範囲の短辺にほぼ平行に位置する位置関係にある。これにより、当該仮想線が読取可能な範囲の長辺にほぼ平行に位置する位置関係にある場合に比べ、マーカ光源の発光軸と結像レンズの光軸との間の光軸間距離dが短くなるため、「d×n/m」で求められるオフセット量fを小さくすることができる。したがって、マーカ光源および受光センサを支持する支持部材の、受光センサがずれて位置する方向の長さを短くすることができる。
【0017】
請求項3の発明では、マーカ光源および受光センサが取り付けられているプリント配線基板には、マーカ光源および受光センサをそれぞれ駆動制御し得る回路配線が施されている。これにより、支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0018】
請求項4の発明では、支持部材により、マーカ光源の発光軸と第1の受光センサの受光軸と第2の受光センサの受光軸とがそれぞれ互いに平行になるようにマーカ光源、第1の受光センサおよび第2の受光センサを支持している。そして、マーカ光源の発光軸と第1の結像レンズの光軸との間の距離を光軸間距離d1、情報コードと第1の結像レンズの主点との間の距離を物体距離m1、第1の結像レンズの主点と第1の受光センサの受光面との間の距離を結像距離n1、とすると、第1の受光センサは、第1の結像レンズの光軸に対して第1の受光センサの受光軸がマーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置し、マーカ光源の発光軸と第2の結像レンズの光軸との間の距離を光軸間距離d2、情報コードと第2の結像レンズの主点との間の距離を物体距離m2、第2の結像レンズの主点と第2の受光センサの受光面との間の距離を結像距離n2、とすると、第2の受光センサは、第2の結像レンズの光軸に対して第2の受光センサの受光軸がマーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置している。
【0019】
即ち、情報コードと第1の結像レンズの主点との間の距離を物体距離m1、第1の結像レンズの主点と第1の受光センサの受光面との間の距離を結像距離n1、とすると、情報コード(物体)と第1の受光センサの受光面上の結像(像)との間の物像距離は、物体距離m1と結像距離n1との和(m1+n1)となり、また結像レンズの倍率は、結像距離n1を物体距離m1で除した値(n1/m1)になる。このため、マーカ光源の発光軸と第1の結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離d1とすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って第1の受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d1×n1/m1」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0020】
同様に、情報コードと第2の結像レンズの主点との間の距離を物体距離m2、第2の結像レンズの主点と第2の受光センサの受光面との間の距離を結像距離n2、とすると、情報コード(物体)と第2の受光センサの受光面上の結像(像)との間の物像距離は、物体距離m2と結像距離n2との和(m2+n2)となり、また結像レンズの倍率は、結像距離n2を物体距離m2で除した値(n2/m2)になる。このため、マーカ光源の発光軸と第2の結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離d2とすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って第1の受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d2×n2/m2」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0021】
これにより、「d1×n1/m1」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第1の受光センサを配置することによって、マーカ光源の発光軸と第1の受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。また、「d2×n2/m2」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第2の受光センサを配置することによって、マーカ光源の発光軸と第2の受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。このように「d1×n1/m1」で求められるオフセット量f1だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第1の受光センサを配置し、「d2×n2/m2」で求められるオフセット量f2だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第2の受光センサを配置することで、マーカ光源の発光軸と第1の受光センサの受光軸とを互いに交差する構成や、マーカ光源の発光軸と第2の受光センサの受光軸とを互いに交差する構成を採る必要がない。
【0022】
このため、マーカ光源、第1の受光センサおよび第2の受光センサをそれぞれ別の支持部材に取り付けたり、これらのいずれかに角度θを持たせるためのスペーサ等を介在させて支持部材に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。また、マーカ光源を挟んで、第1の受光センサおよび第2の受光センサが配置されているので、同一の読取対象に対して異なった角度で読み取ることができる。このため、例えば、第1の受光センサに対しては、情報コードに反射した反射光が鏡面反射になっても、第2の受光センサは異なった角度に位置するので、鏡面反射ではない反射光を受光することができる。
【0023】
請求項5の発明では、読取可能な範囲が長方形状をなす場合、第1の結像レンズの光軸と第2の結像レンズの光軸とを結ぶ仮想線は、読取可能な範囲の短辺にほぼ平行に位置する位置関係にある。これにより、当該仮想線が読取可能な範囲の長辺にほぼ平行に位置する位置関係にある場合に比べ、マーカ光源の発光軸と第1の結像レンズの光軸との間の光軸間距離d1が短くなるため、「d1×n1/m1」で求められるオフセット量f1を小さくすることができ、またマーカ光源の発光軸と第2の結像レンズの光軸との間の光軸間距離d2が短くなるため、「d2×n2/m2」で求められるオフセット量f2を小さくすることができる。したがって、マーカ光源、第1の受光センサおよび第2の受光センサを支持する支持部材の、第1の受光センサや第2の受光センサがずれて位置する方向の長さを短くすることができる。
【0024】
請求項6の発明では、マーカ光源、第1の受光センサおよび第2の受光センサが取り付けられているプリント配線基板には、マーカ光源、第1の受光センサおよび第2の受光センサをそれぞれ駆動制御し得る回路配線が施されている。これにより、支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の光学的情報読取装置を二次元コードリーダに適用した実施形態を各図に基づいて説明する。
【0026】
[第1実施形態]
本発明の第1実施形態を図1〜図5を参照して説明する。まず、本第1実施形態に係る二次元コードリーダ10の構成を図1〜図4に基づいて説明する。
【0027】
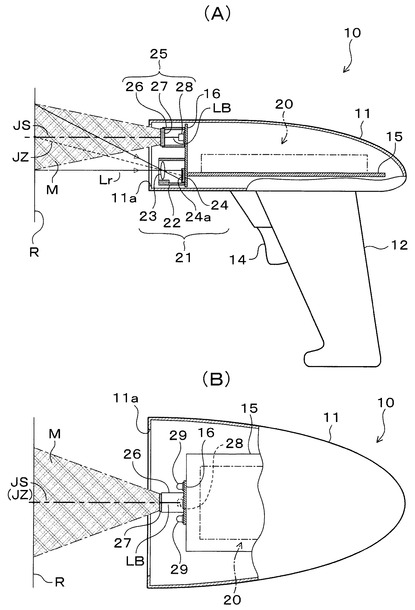
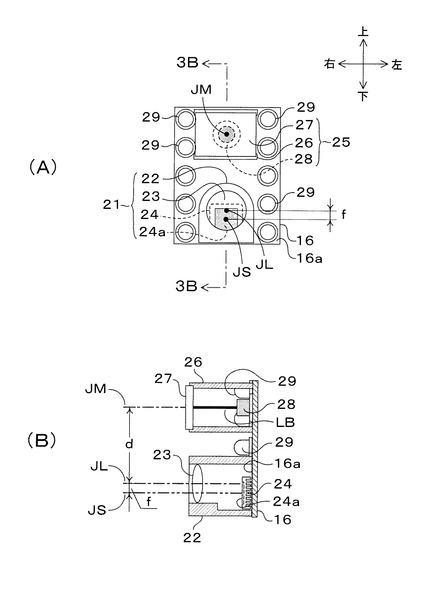
なお、図1には、二次元コードリーダ10の構成概要を示す説明図(同(A):部分縦断面図、同(B):部分横断面図)が図示されている。また図2には、二次元コードリーダ10を構成する制御系ユニット基板15および光学系ユニット基板16の回路構成等を示すブロック図が図示されており、そのうちの光学系ユニット基板16の構成例を示す説明図が図3に図示されている(同(A):正面図、同(B):3B線断面図)。図3(A) に記載された上下左右の4方向を示す矢印は、使用者により使用可能に把持された二次元コードリーダ10から出射されるマーカ光Mの出射方向を「前方向」(図3の紙面垂直上方向)とした場合における当該光学系ユニット基板16の各方向を示すものである。また、図4には、光学系ユニット基板16のマーカ光学系25から照射されるマーカ光Mと読取可能範囲ARとの関係等が図示されている。
【0028】
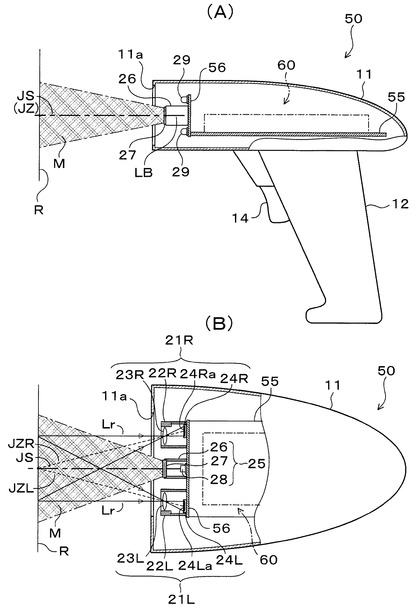
図1(A) および図1(B) に示すように、二次元コードリーダ10は、丸みを帯びた薄型のほぼ矩形箱状なすハウジング本体11と、このハウジング本体11の下面ほぼ中央後端寄りにハウジング本体11に一体に形成されるグリップ部12と、からなるガンタイプのハウジングを備えている。このグリップ部12は、使用者が片手で把持可能な程度の外径に設定されており、当該グリップ部12を握った使用者の人差し指が当接する部位に、後述する照明光の出射を指示するトリガスイッチ14が設けられている。
【0029】
ハウジング本体11の内部には、後述する制御系ユニット基板15や光学系ユニット基板16が収容されており、またハウジング本体11の先端部には、当該光学系ユニット基板16から発せられる照明光やマーカ光Mの出射を可能にしたり、反射光の入射を可能にする読取口11aが形成されている。
【0030】
図1〜図3に示すように、制御系ユニット基板15に実装される回路部20は、主に、読取光学系21、マーカ光学系25、照明光源29等の光学系と、メモリ35、制御回路40、操作スイッチ42、液晶表示器46等のマイクロコンピュータ(以下「マイコン」という)系と、電源スイッチ41、電池49等の電源系と、から構成されている。これらは、前述した制御系ユニット基板15や光学系ユニット基板16に実装あるいはハウジング本体11内に内装されている。
【0031】
図1および図3に示すように、読取光学系21は、鏡筒22、結像レンズ23および受光センサ24から構成され、結像レンズ23を介して入射する入射光を受光センサ24の受光面24aで受光可能に光学系ユニット基板16に実装されている。
【0032】
即ち、結像レンズ23は、読取対象物Rに反射し読取口11aを介して入射する反射光Lr(入射光)を集光して受光センサ24の受光面24aに像を結像可能にし、鏡筒22は、このような結像レンズ23をその光軸(レンズ軸)JLが基板表面16aに垂直に位置するように支持している(図3(B) 参照)。なお、この読取対象物Rには、情報コードとして二次元コード(QRコード、データマトリックスやマキシコード、PDF417、ベリコード、CPコード、カルラコード等)Qが貼付されている。
【0033】
受光センサ24は、読取対象物Rや二次元コードQに照射されて反射した反射光Lrを受光可能に構成されるもので、例えば、C−MOSやCCD等の固体撮像素子である。本実施形態の場合、情報コードとして二次元コードQを読み取るため、複数の受光素子が長方形状の矩形範囲に配置されて構成される受光面24aを有する、いわゆるエリアセンサを用いており、その受光軸JS(例えば複数の受光素子が長方形状の矩形範囲に配置される場合、受光面24aに対して前述の交点を垂直に通る軸)が光学系ユニット基板16の基板表面16aに対してほぼ垂直になるように実装されている(図3(B) 参照)。なお、受光センサ24は、受光面24aが正方形状に構成されるエリアセンサであっても良い。
【0034】
本第1実施形態では、この受光センサ24は、その受光面24aがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24aの受光中心(例えば、複数の受光素子が長方形状の矩形範囲に配置される場合、当該矩形の対角線の交点)が後述するオフセット量fだけ、二次元コードリーダ10の下側にずれて位置するように、光学系ユニット基板16に実装されている(図3(A) 参照)。これにより、受光センサ24は、その受光軸JSが結像レンズ23の結像レンズの光軸JLに対して後述するオフセット量fだけ、二次元コードリーダ10の下側にずれて位置する。
【0035】
マーカ光学系25は、ホルダ26、ホログラム27およびマーカ光源28から構成されており、読取対象物Rに対して読取可能範囲を明示し得るマーカ光Mを発する機能を有するもので、これらは光学系ユニット基板16に実装されている。なお、マーカ光源28も、光学系ユニット基板16の基板表面16aに対してその発光軸JMがほぼ垂直になるように実装されている(図3(B) 参照)。つまり、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとは、平行に位置している。
【0036】
即ち、図3および図4に示すように、ホログラム27は、マーカ光源28から照射されて入射するレーザ光LBを、読取可能範囲ARについてガイドマーカGAを投射可能なマーカ光Mを出射し得るホログラムプレートで、レーザ光LBを回折させてこのようなマーカ光Mを生成可能な回折格子が形成されている。そして、ホルダ26は、このような回折格子にレーザ光LBが入射し得るようにホログラム27を支持している。マーカ光源28は、レーザダイオード(例えばInGaAlPレーザを出力するもの)により構成されている。
【0037】
照明光源29は、読取対象物Rに照射される照射光Lfを発光可能な機能を有するもので、複数個の赤色のLEDとこれらのLEDの出射側に設けられる図略の拡散レンズ等とから構成されている。図3(A) に示すように、照明光源29は、例えば、結像レンズ23および受光センサ24の両側を直線状に囲むように配置された10個のLEDにより構成されており、ハウジング本体11の読取口11aを介して読取対象物Rに向けて照明光Lfを照射可能に実装されている。
【0038】
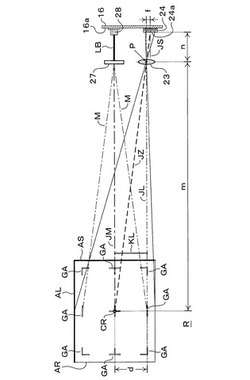
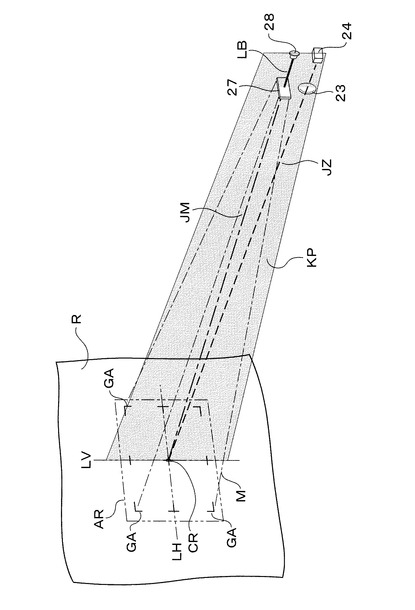
なお、読取光学系21を構成する結像レンズ23および受光センサ24と、マーカ光学系25を構成するホログラム27およびマーカ光源28と、の位置関係を模式的に図示すると、図4に示されるように表される。即ち、マーカ光源28の発光軸JMと二次元コードQとの交点にあたる読取中心CR(読取可能範囲ARの中心)から結像レンズ23の主点を通って受光センサ24の受光面24aに至るまでの軸、つまり読取光学系21の光軸JZと、マーカ光源28の発光軸JMとは、同一の仮想面KPに含まれ、さらにこの仮想面KPには、読取中心CRを通る読取可能範囲ARの縦方向中心線LVが含まれる。
【0039】
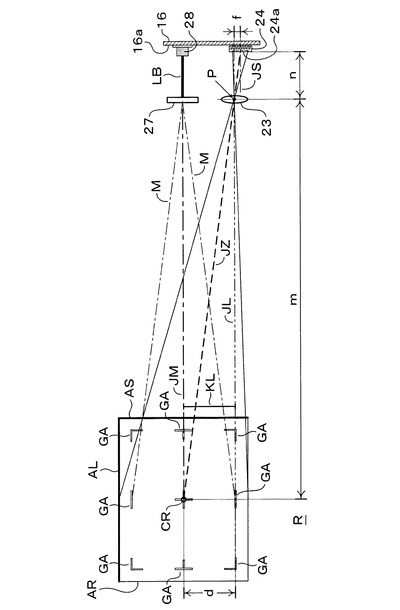
このように光学系を構成することにより、図5に示すように、マーカ光源28の発光軸JMと結像レンズ23の光軸JLとの間の距離を光軸間距離d、二次元コードQ(読取対象物R)と結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n、とすると、前述した受光センサ24のオフセット量fは、d×n/mで求められる値に設定されている。なお、図5には、結像レンズ23、受光センサ24、マーカ光学系25、読取対象物R、の距離関係等を示す説明図が図示されている。
【0040】
即ち、二次元コードQ(物体)と受光センサ24の受光面24a上の結像(像)との間の物像距離は、物体距離mと結像距離nとの和(m+n)となり、また結像レンズ23の倍率は、結像距離nを物体距離mで除した値(n/m)になることから、結像レンズ23の共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから結像レンズ23の主点Pを通って受光センサ24の受光面24aに至るまでの軸、つまり読取光学系21の光軸JZは、「d×n/m」で求められる距離fだけマーカ光源28から離れる方向にシフトした位置で受光面24aに交わる。
【0041】
このため、オフセット量f(=d×n/m)だけマーカ光源28から離れる方向にシフトした位置に、受光面24aの受光中心またはその周囲が位置するように受光センサ24を配置することによって、図3(B) に示すように、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるような位置関係でマーカ光源28および受光センサ24が光学系ユニット基板16に実装されていても、物像距離(m+n)において、結像レンズ23の主点Pを通る読取光学系21の光軸JZをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0042】
これにより、このような位置関係で、マーカ光源28、結像レンズ23および受光センサ24をそれぞれ光学系ユニット基板16の基板上に配置することで、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが微小角度θで交差するような構成を採ることなく、物像距離(m+n)における読取可能範囲ARとガイドマーカGAで囲まれた範囲とをほぼ一致させることができる。
【0043】
なお、光学系ユニット基板16にマーカ光源28や受光センサ24を直接実装する場合には、光学系ユニット基板16に電子部品を自動的に実装するマウンタ装置によって高精度に位置決めされ、また結像レンズ23は鏡筒22を介して光学系ユニット基板16に実装されるため、結像レンズ23、受光センサ24およびマーカ光源28の位置関係はほとんど一義的に決定される。このため、これらの位置関係の微調整は要しない。
【0044】
したがって、読取光学系21(鏡筒22、結像レンズ23、受光センサ24)とマーカ光学系25(ホルダ26、ホログラム27、マーカ光源28)とを、それぞれ別の支持部材(例えば、サブ基板やハウジング本体11の内側に形成される支持ポストや凸部等)に取り付けたり、これらの受光センサ24およびマーカ光源28のいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板16に取り付ける必要がないので、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0045】
なお、本第1実施形態では、図5に示すように、読取可能範囲ARが長辺ALおよび短辺ASからなる長方形状をなすことから、結像レンズ23の光軸JLとマーカ光源28の発光軸JMとを結ぶ仮想線KLが、読取可能範囲ARの短辺ASにほぼ平行に位置するように、受光センサ24の実装位置をマーカ光源28から離れる方向で二次元コードリーダ10の下側にオフセット量fだけずれて位置するように設定している。
【0046】
これにより、当該仮想線KLが読取可能範囲ARの長辺ALにほぼ平行に位置する位置関係にある場合に比べて、マーカ光源28の発光軸JMと結像レンズ23の光軸JLとの間の光軸間距離dが短くなるため、受光センサ24のオフセット量fを小さくすることができ、光学系ユニット基板16の受光センサ24がずれて位置する方向の長さを短くすることができる。つまり、二次元コードリーダ10においては、その上下方向の長さを短くできるので、ハウジング本体11の厚さを薄くすることが可能となる。
【0047】
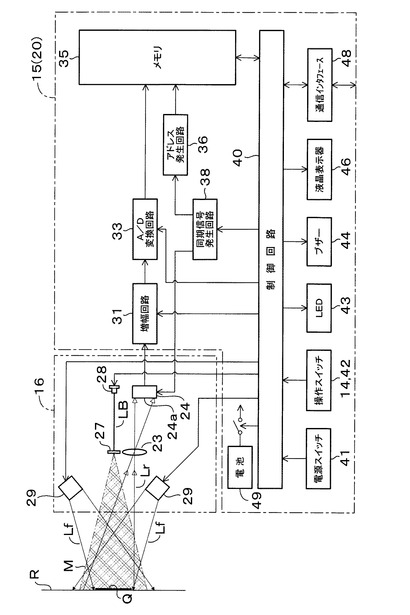
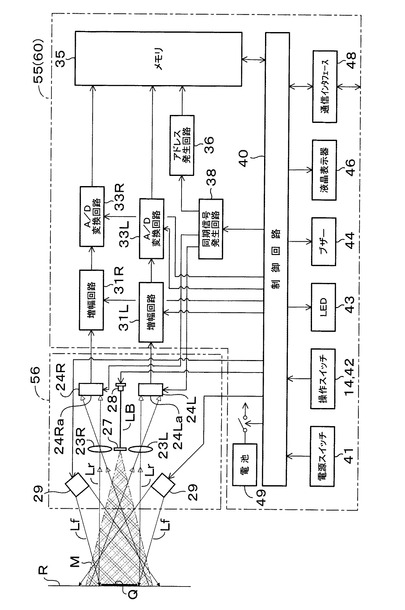
次に、図2に戻ってマイコン系の構成概要を説明する。マイコン系は、増幅回路31、A/D変換回路33、メモリ35、アドレス発生回路36、同期信号発生回路38、制御回路40、操作スイッチ14,42、LED43、ブザー44、液晶表示器46、通信インタフェース48等から構成されている。このマイコン系は、その名の通り、マイコンとして機能し得る制御回路40およびメモリ35を中心に構成される。
【0048】
光学系の受光センサ24から出力される画像信号は、増幅回路31に入力されることで所定ゲインで増幅された後、A/D変換回路33に入力されると、アナログ信号からディジタル信号に変換される。そして、ディジタル化された画像信号、つまり画像データは、メモリ35に入力されると、画像データ蓄積領域に蓄積される。なお、同期信号発生回路38は、受光センサ24およびアドレス発生回路36に対する同期信号を発生可能に構成されており、またアドレス発生回路36は、この同期信号発生回路38から供給される同期信号に基づいて、メモリ35に格納される画像データの格納アドレスを発生可能に構成されている。
【0049】
メモリ35は、半導体メモリ装置で、例えばRAM(DRAM、SRAM等)やROM(EPROM、EEPROM等)がこれに相当する。このメモリ35のうちのRAMには、前述した画像データ蓄積領域のほかに、制御回路40が算術演算や論理演算等の各処理時に利用する作業領域等も確保可能に構成されている。またROMには、後述するデコード処理等を実行可能な所定プログラムやその他、受光センサ24、マーカ光源28、照明光源29等の各ハードウェアを制御可能なシステムプログラム等が予め格納されている。
【0050】
制御回路40は、二次元コードリーダ10全体を制御可能なマイコンで、CPU、システムバス、入出力インタフェース等からなり、メモリ35とともに情報処理装置を構成し得るもので情報処理機能を有する。この制御回路40には、内蔵された入出力インタフェースを介して種々の入出力装置と接続可能に構成されており、本実施形態の場合、電源スイッチ41、操作スイッチ42(トリガスイッチ14)、LED43、ブザー44、液晶表示器46、通信インタフェース48等が接続されている。
【0051】
これにより、例えば、電源スイッチ41や操作スイッチ42、トリガスイッチ14の監視や管理、またインジケータとして機能するLED43の点灯・消灯、ビープ音やアラーム音を発生可能なブザー44の鳴動のオンオフ、さらには読み取った二次元コードQによるコード内容を画面表示可能な液晶表示器46の画面制御や外部装置とのシリアル通信を可能にする通信インタフェース48の通信制御等を可能にしている。なお、通信インタフェース48に接続される外部装置には、当該二次元コードリーダ10の上位システムに相当するホストコンピュータ等が含まれる。
【0052】
電源系は、電源スイッチ41、電池49等により構成されており、制御回路40により管理される電源スイッチ41のオンオフによって、上述した各装置や各回路に、電池49から供給される駆動電圧の導通や遮断が制御されている。なお、電池49は、所定の直流電圧を発生可能な二次電池で、例えば、リチウムイオン電池等がこれに相当する。
【0053】
このように二次元コードリーダ10を構成することにより、例えば、電源スイッチ41がオンされて所定の自己診断処理等が正常終了し、二次元コードQの読み取りが可能な状態になると、制御回路40が照明光Lfの発光を指示するトリガスイッチ14の入力を受け付けるとともに、同期信号を基準に所定周期で発光信号をマーカ光源28に出力する。
【0054】
これによって、発光信号を受けたマーカ光源28は、レーザダイオードを間欠的に発光させてホログラム27を介してマーカ光Mを発するため、使用者が当該二次元コードリーダ10の読取口11aを読取対象物Rに向けることで、例えば、図4に示すように、マーカ光Mが読取対象物Rに照射されて映る。
【0055】
即ち、マーカ光Mにより映し出されるガイドマーカGAによって囲まれる範囲が、読取可能範囲ARが当該二次元コードリーダ10の使用者に明示されるとともに、その範囲のほぼ中央に位置する読取中心CRが当該使用者に明示される。このため、当該使用者は、ガイドマーカGAにより、読取可能範囲ARとその読取中心CRを把握することができるので、読取対象物Rに貼付や印刷された二次元コードQに対して読取口11aの向きを合わせることが可能となる。
【0056】
そして、使用者がトリガスイッチ14をオンにすることによって、制御回路40が同期信号を基準に照明光源29に発光信号を出力するので、当該発光信号を受けた照明光源29は照明光Lfを照射し、照射された照明光Lfが二次元コードQ等に反射するとその反射光Lrが読取口11aを介して結像レンズ23に入射する。このため、受光センサ24の受光面24aには、二次元コードQの像が結像されるので、上述したマイコン系により画像処理された後、画像データとしてメモリ35を介して、デコード処理に渡される。メモリ35から当該画像データを取り出した制御回路40は、所定のデコード処理によって当該画像データをデコードしデコードデータとして外部に出力する。
【0057】
以上説明したように、本第1実施形態に係る二次元コードリーダ10では、図1〜図5に示すように、光学系ユニット基板16によりマーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるようにマーカ光源28および受光センサ24を支持する。そして、結像レンズ23の光軸JLに対して受光センサ24の受光軸JSがマーカ光源28から離れる方向に「d×n/m」(発光軸JMと光軸JLとの間の距離を光軸間距離d、二次元コードQと結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n)で表されるオフセット量fだけ、ずれるように、受光センサ24を光学系ユニット基板16に実装した。
【0058】
これにより、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるような位置関係にあっても、結像レンズ23の主点Pを通る読取光学系21の光軸JZをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。このため、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとを互いに交差する構成を採る必要がないことから、マーカ光源28および受光センサ24をそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板16に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0059】
また、マーカ光源28および受光センサ24が取り付けられている光学系ユニット基板16には、前述したように、これらをそれぞれ駆動制御し得る回路配線が施されているため、このような光学系ユニット基板16ではない他の支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0060】
[第2実施形態]
次に、本発明の第2実施形態を図6〜図10を参照して説明する。本第2実施形態に係る二次元コードリーダ50は、読取光学系21を2セット備え、マーカ光学系25の右側(マーカ光Mの出射方向を「前方向」とした場合の右方向側)に右側読取光学系21R、マーカ光学系25の左側(マーカ光Mの出射方向を「前方向」とした場合の左方向側)に左側読取光学系21Lを、それぞれ設けている点が、読取光学系21を1セットしか備えない第1実施形態に係る二次元コードリーダ10と異なる。そのため、他の構成部分については、第1実施形態の二次元コードリーダ10と実質的に同一であるので、これらの部分には同一符号を付して説明を省略する。まず、本第2実施形態に係る二次元コードリーダ50の構成を図6〜図8に基づいて説明する。
【0061】
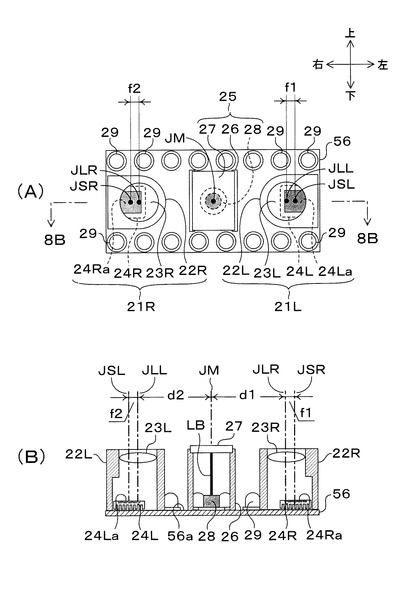
なお、図6には、二次元コードリーダ50の構成概要を示す説明図(同(A):部分縦断面図、同(B):部分横断面図)が図示されている。また図7には、二次元コードリーダ50を構成する制御系ユニット基板55および光学系ユニット基板56の回路構成等を示すブロック図が図示されており、そのうちの光学系ユニット基板56の構成例を示す説明図が図8に図示されている(同(A):正面図、同(B):8B線断面図)。図8(A) に記載された上下左右の4方向を示す矢印は、使用者により使用可能に把持された二次元コードリーダ50から出射されるマーカ光Mの出射方向を「前方向」(図8の紙面垂直上方向)とした場合における当該光学系ユニット基板56の各方向を示すものである。
【0062】
図6(A) および図6(B) に示すように、ハウジング本体11の内部には、制御系ユニット基板55や光学系ユニット基板56が収容されている。これらの各ユニット基板は、当該二次元コードリーダ50が読取光学系21を2セット備えている点で、前述した二次元コードリーダ10の制御系ユニット基板15や光学系ユニット基板16と構成が異なる。
【0063】
即ち、図6(B) に示すように、右側読取光学系21Rとして、鏡筒22R、右側結像レンズ23Rおよび右側受光センサ24Rを備え、また左側読取光学系21Lとして、鏡筒22L、左側結像レンズ23Lおよび左側受光センサ24Lを備えており、図8に示すように、マーカ光学系25を中心にしてそれぞれ左右対称に光学系ユニット基板56に実装されている。
【0064】
また、図7に示すように、制御系ユニット基板55には、右側読取光学系21Rの右側受光センサ24Rから出力される画像信号を処理する増幅回路31RおよびA/D変換回路33R、また左側読取光学系21Lの左側受光センサ24Lから出力される画像信号を処理する増幅回路31LおよびA/D変換回路33L、そしてこれらのA/D変換回路33R,33Lから出力されるディジタル信号を処理する制御回路40、メモリ35等が、回路部50として実装されている。
【0065】
なお、図8に示すように、右側の鏡筒22Rおよび左側の鏡筒22L(以下、左右両側の鏡筒を総称する場合には「両鏡筒22R・22L」という)、右側結像レンズ23Rおよび左側結像レンズ23L(以下、左右両側の結像レンズを総称する場合には「両結像レンズ23R・23L」という)、右側受光センサ24Rおよび左側受光センサ24L(以下、左右両側の受光センサを総称する場合には「両受光センサ24R・24L」という)は、それぞれ個々には、前述した二次元コードリーダ10の光学系ユニット基板16を構成する鏡筒22、結像レンズ23、受光センサ24と同様に構成されており、これらはそれぞれ光学系ユニット基板56の基板表面56aに対して、垂直に実装されている。
【0066】
また、これらは、マーカ光学系25を中心にしてそれぞれ左右対称に光学系ユニット基板56に実装されているため、前述した光学系ユニット基板16が二次元コードリーダ10の上下方向に長い長方形状であったのに対し、本第2実施形態の光学系ユニット基板56は、二次元コードリーダ50の左右方向に長い長方形状を有する。
【0067】
このため、本第2実施形態の二次元コードリーダ50では、マーカ光学系25の右側に配置される右側読取光学系21Rの右側受光センサ24Rは、図8(A) および図8(B) に示すように、その受光面24Raがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24Raの受光中心(例えば、複数の受光素子が長方形状の矩形範囲に配置される場合、当該矩形の対角線の交点)がオフセット量f1だけ、二次元コードリーダ50の右側にずれて位置するように、光学系ユニット基板56に実装されている。つまり、受光センサ24Rは、その受光軸JSRが結像レンズ23の結像レンズの光軸JLRに対してオフセット量f1だけ、二次元コードリーダ50の右側にずれて位置する。
【0068】
これに対し、マーカ光学系25の左側に配置される左側読取光学系21Lの左側受光センサ24Lは、その受光面24Laがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24Laの受光中心がオフセット量f2だけ、二次元コードリーダ50の左側にずれて位置するように、光学系ユニット基板56に実装されている。つまり、受光センサ24Lは、その受光軸JSLが結像レンズ23の結像レンズの光軸JLLに対してオフセット量f2だけ、二次元コードリーダ50の左側にずれて位置する。
【0069】
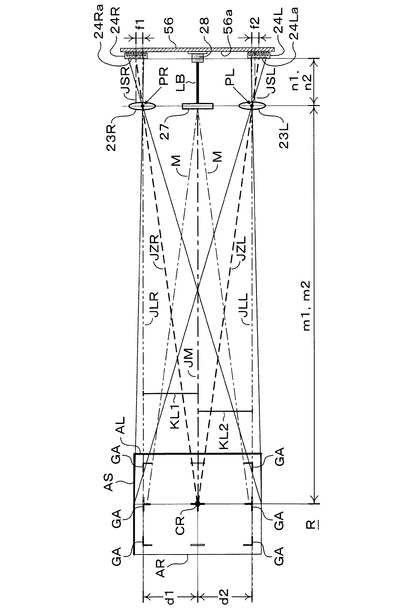
このように光学系を構成することにより、図9に示すように、マーカ光源28の発光軸JMと右側結像レンズ23Rの光軸JLRとの間の距離を光軸間距離d1、二次元コードQ(読取対象物R)と右側結像レンズ23Rの主点PRとの間の距離を物体距離m1、右側結像レンズ23Rの主点PRと右側受光センサ24Rの受光面24Raとの間の距離を結像距離n1、とすると、前述した右側受光センサ24Rのオフセット量f1は、d1×n1/m1で求められる値に設定されている。
【0070】
同様に、マーカ光源28の発光軸JMと左側結像レンズ23Lの光軸JLLとの間の距離を光軸間距離d2、二次元コードQ(読取対象物R)と左側結像レンズ23Lの主点PLとの間の距離を物体距離m2、左側結像レンズ23Lの主点PLと左側受光センサ24Lの受光面24Laとの間の距離を結像距離n2、とすると、前述した左側受光センサ24Lのオフセット量f2は、d2×n2/m2で求められる値に設定されている。
【0071】
即ち、二次元コードQ(物体)と右側受光センサ24Rの受光面24Ra上の結像(像)との間の物像距離は、物体距離m1と結像距離n1との和(m1+n1)となり、また右側結像レンズ23Rの倍率は、結像距離n1を物体距離m1で除した値(n1/m1)になる。左側結像レンズ23Lの倍率についても、同様に、結像距離n2を物体距離m2で除した値(n2/m2)になる。
【0072】
なお、本第2実施形態の場合、両受光センサ24R・24Lは、マーカ光源28を中心に左右対称に光学系ユニット基板56に実装されることから、物体距離m1とm2は同一であり、また結像距離n1とn2は同一である。このため、両結像レンズ23R・23Lの倍率は同じになることから、右側結像レンズ23Rの共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから、右側結像レンズ23Rの主点PRを通って右側受光センサ24Rの受光面24Raに至るまでの軸、つまり右側読取光学系21Rの光軸JZRは、「d1×n1/m1」で求められる距離f1だけマーカ光源28から右側に離れる方向にシフトした位置で受光面24Raに交わる。
【0073】
したがって、右側受光センサ24Rについては、オフセット量f1(=d1×n1/m1)だけマーカ光源28から右側に離れる方向にシフトした位置に、受光面24Raの受光中心またはその周囲が位置するように配置することにより、図8(B) に示すように、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRとが平行になるような位置関係でマーカ光源28および右側受光センサ24Rが光学系ユニット基板56に実装されていても、物像距離(m1+n1)において、右側結像レンズ23Rの主点PRを通る右側読取光学系21Rの光軸JZRをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0074】
これに対し、左側結像レンズ23Lの共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから、左側結像レンズ23Lの主点PLを通って左側受光センサ24Lの受光面24Laに至るまでの軸、つまり左側読取光学系21Lの光軸JZLは、「d2×n2/m2」で求められる距離f2だけマーカ光源28から左側に離れる方向にシフトした位置で受光面24Laに交わる。
【0075】
したがって、左側受光センサ24Lについては、オフセット量f2(=d2×n2/m2)だけマーカ光源28から左側に離れる方向にシフトした位置に、受光面24Laの受光中心またはその周囲が位置するように配置することにより、図8(B) に示すように、マーカ光源28の発光軸JMと左側受光センサ24Lの受光軸JSLとが平行になるような位置関係でマーカ光源28および左側受光センサ24Lが光学系ユニット基板56に実装されていても、物像距離(m2+n2)において、左側結像レンズ23Lの主点PLを通る左側読取光学系21Lの光軸JZLをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0076】
これにより、このような位置関係で、マーカ光源28、両結像レンズ23R・23L、両受光センサ24R・24Lをそれぞれ光学系ユニット基板56の基板上に配置することで、マーカ光源28の発光軸JMと両受光センサ24R・24Lの受光軸JSR,JSLとが微小角度θで交差するような構成を採ることなく、物像距離における読取可能範囲ARとガイドマーカGAで囲まれた範囲とをほぼ一致させることができる。
【0077】
なお、光学系ユニット基板56にマーカ光源28、両受光センサ24R・24Lを直接実装する場合には、光学系ユニット基板56に電子部品を自動的に実装するマウンタ装置によって高精度に位置決めされ、また右側結像レンズ23Rは鏡筒22Rを介して、また左側結像レンズ23Lは鏡筒22Lを介して、それぞれ光学系ユニット基板56に実装されるため、両結像レンズ23R・23L、両受光センサ24R・24Lおよびマーカ光源28の位置関係はほとんど一義的に決定される。このため、これらの位置関係の微調整は要しない。
【0078】
したがって、右側読取光学系21R(鏡筒22R、右側結像レンズ23R、右側受光センサ24R)と左側読取光学系21L(鏡筒22L、左側結像レンズ23L、左側受光センサ24L)とマーカ光学系25(ホルダ26、ホログラム27、マーカ光源28)とを、それぞれ別の支持部材(例えば、サブ基板やハウジング本体11の内側に形成される支持ポストや凸部等)に取り付けたり、両受光センサ24R・24Lおよびマーカ光源28のいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板56に取り付ける必要がないので、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0079】
なお、本第2実施形態では、図9に示すように、読取可能範囲ARが長辺ALおよび短辺ASからなる長方形状をなすことから、右側結像レンズ23Rの光軸JLRとマーカ光源28の発光軸JMとを結ぶ仮想線KL1が、読取可能範囲ARの長辺ALにほぼ平行に位置するように、右側受光センサ24Rの実装位置をマーカ光源28から離れる方向で二次元コードリーダ50の右側にオフセット量f1だけずれて位置するように設定している。同様に、左側結像レンズ23Lの光軸JLLとマーカ光源28の発光軸JMとを結ぶ仮想線KL2が、読取可能範囲ARの長辺ALにほぼ平行に位置するように、左側受光センサ24Lの実装位置をマーカ光源28から離れる方向で二次元コードリーダ50の左側にオフセット量f2だけずれて位置するように設定している。
【0080】
これにより、当該仮想線KL1,KL2が読取可能範囲ARの短辺ASにほぼ平行に位置する位置関係にある場合に比べて、当該右側受光センサ24Rが実装される光学系ユニット基板56の幅を二次元コードリーダ10の上下方向に拡げる必要がないので、その分、ハウジング本体11の厚さを薄くすることが可能となる。
【0081】
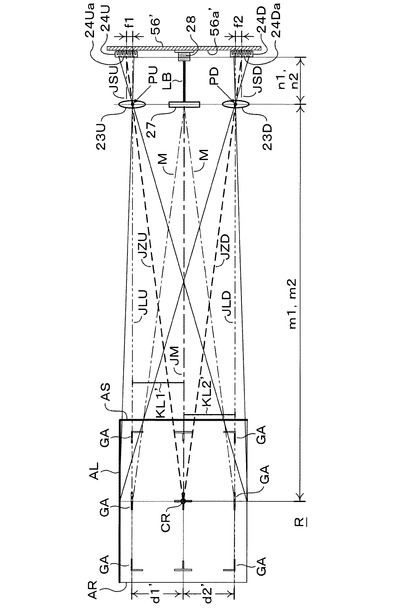
また、図10に示すように、二次元コードリーダ50の上下方向に長い長方形状の光学系ユニット基板56’を用いる場合においては、上側受光センサ24Uをマーカ光源28から離れる方向で二次元コードリーダ50の上側にオフセット量f1だけずれて位置するように光学系ユニット基板56’に実装し、下側受光センサ24Dをマーカ光源28から離れる方向で二次元コードリーダ50の下側にオフセット量f2だけずれて位置するように光学系ユニット基板56’に実装することになる。
【0082】
このような場合には、上側結像レンズ23Uの光軸JLUとマーカ光源28の発光軸JMとを結ぶ仮想線KL1’が、読取可能範囲ARの短辺ASにほぼ平行に位置するように、上側受光センサ24Uの実装位置を上側にオフセット量f1だけずれて設定し、また下側結像レンズ23Dの光軸JLDとマーカ光源28の発光軸JMとを結ぶ仮想線KL2’が、読取可能範囲ARの短辺ASにほぼ平行に位置するように、下側受光センサ24Dの実装位置を下側にオフセット量f2だけずれて設定する。
【0083】
これにより、当該仮想線KL1’,KL2’が読取可能範囲ARの長辺ALにほぼ平行に位置する位置関係にある場合に比べて、マーカ光源28の発光軸JMと上側結像レンズ23Uの光軸JLUとの間の光軸間距離d1’が短くなるため、上側受光センサ24Uのオフセット量f1を小さくすることができ、またマーカ光源28の発光軸JMと下側結像レンズ23Dの光軸JLDとの間の光軸間距離d2’が短くなるため、下側受光センサ24Dのオフセット量f2を小さくすることができる。
【0084】
このため、このような場合においても、光学系ユニット基板56’の上側受光センサ24Uや下側受光センサ24Dがずれて位置する方向の長さ、つまり二次元コードリーダ50においては、その上下方向の長さを短くできるので、ハウジング本体11の厚さを薄くすることが可能となる。
【0085】
以上説明したように、本第2実施形態に係る二次元コードリーダ50では、図6〜図10に示すように、光学系ユニット基板56により、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRと左側受光センサ24Lの受光軸JSLとがそれぞれ互いに平行になるようにマーカ光源28、右側受光センサ24Rおよび左側受光センサ24Lを支持する。そして、右側結像レンズ23Rの光軸JLRに対して右側受光センサ24Rの受光軸JSRがマーカ光源28から離れる方向に「d1×n1/m1」(発光軸JMと光軸JLRとの間の距離を光軸間距離d1、二次元コードQと右側結像レンズ23Rの主点PRとの間の距離を物体距離m1、右側結像レンズ23Rの主点PRと右側受光センサ24Rの受光面24Raとの間の距離を結像距離n1)で表されるオフセット量f1だけ、ずれるように右側受光センサ24Rを実装し、また左側結像レンズ23Lの光軸JLLに対して左側受光センサ24Lの受光軸JSLがマーカ光源28から離れる方向に「d2×n2/m2」(発光軸JMと光軸JLLとの間の距離を光軸間距離d2、二次元コードQと左側結像レンズ23Lの主点PLとの間の距離を物体距離m2、左側結像レンズ23Lの主点PLと左側受光センサ24Lの受光面24Laとの間の距離を結像距離n2)で表されるオフセット量f2だけ、ずれるように左側受光センサ24Lを実装した。
【0086】
これにより、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRとが平行になるような位置関係にあっても、右側結像レンズ23Rの主点PRを通る右側読取光学系21Rの光軸JZRをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。また、マーカ光源28の発光軸JMと左側受光センサ24Lの受光軸JSLとが平行になるような位置関係にあっても、左側結像レンズ23Lの主点PLを通る左側読取光学系21Lの光軸JZLをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。このため、マーカ光源28の発光軸JMと両受光センサ24R・24Lの受光軸JSR,JSLとを互いに交差する構成を採る必要がないことから、マーカ光源28および両受光センサ24R・24Lをそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板56に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0087】
また、マーカ光源28および両受光センサ24R・24Lが取り付けられている光学系ユニット基板56には、これらをそれぞれ駆動制御し得る回路配線が施されているため、このような光学系ユニット基板56ではない他の支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0088】
さらに、マーカ光源28を挟んで、両受光センサ24R・24Lが配置されているので、同一の読取対象物Rに対して異なった角度で読み取ることができる。このため、例えば、右側受光センサ24Rに対しては、二次元コードQに反射した反射光が鏡面反射になっても、左側受光センサ24Lは異なった角度に位置するので、鏡面反射ではない反射光を受光することができる。
【図面の簡単な説明】
【0089】
【図1】本発明の第1実施形態に係る二次元コードリーダの構成を示す説明図で、図1(A) は部分縦断面を示すもの、図1(B) は部分横断面を示すもの、である。
【図2】第1実施形態の二次元コードリーダを構成する制御系ユニット基板および光学系ユニット基板の回路構成等を示すブロック図である。
【図3】第1実施形態の二次元コードリーダを構成する光学系ユニット基板の構成例を示す説明図で、図3(A) は読取口から見える正面を示すもの、図3(B) は図3(A) に示す3B線断面を示すもの、である。
【図4】光学系ユニット基板のマーカ光学系から照射されるマーカ光と読取可能範囲との関係およびマーカ光学系の発光軸と読取光学系の光軸とが同一平面内に実質的に含まれることを示す説明図である。
【図5】第1実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【図6】本発明の第2実施形態に係る二次元コードリーダの構成を示す説明図で、図6(A) は部分縦断面を示すもの、図6(B) は部分横断面を示すもの、である。
【図7】第2実施形態の二次元コードリーダを構成する制御系ユニット基板および光学系ユニット基板の回路構成等を示すブロック図である。
【図8】第2実施形態の二次元コードリーダを構成する光学系ユニット基板の構成例を示す説明図で、図8(A) は読取口から見える正面を示すもの、図8(B) は図8(A) に示す8B線断面を示すもの、である。
【図9】第2実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【図10】第2実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【符号の説明】
【0090】
10、50…二次元コードリーダ(光学的情報読取装置)
15…制御系ユニット基板
16、56、56’…光学系ユニット基板(支持部材、プリント配線基板)
16a、56a、56’a…基板表面(プリント配線基板の基板表面)
20、60…回路部
21…読取光学系
21D…下側読取光学系
21L…左側読取光学系
21R…右側読取光学系
21U…上側読取光学系
22、22R、22L…鏡筒
23…結像レンズ
23D…下側結像レンズ(第2の結像レンズ)
23L…左側結像レンズ(第2の結像レンズ)
23R…右側結像レンズ(第1の結像レンズ)
23U…上側結像レンズ(第1の結像レンズ)
24…受光センサ
24D…下側受光センサ(第2の受光センサ)
24L…左側受光センサ(第2の受光センサ)
24R…右側受光センサ(第1の受光センサ)
24U…上側受光センサ(第1の受光センサ)
24a…受光面
24Da…受光面(第2の受光センサの受光面)
24La…受光面(第2の受光センサの受光面)
24Ra…受光面(第1の受光センサの受光面)
24Ua…受光面(第1の受光センサの受光面)
25…マーカ光学系(マーカ光光学系)
27…ホログラム(マーカ光光学系)
28…マーカ光源(マーカ光光学系)
29…照明光源
AR…読取可能範囲(読取可能な範囲)
AS…短辺(読取可能な範囲の短辺)
AL…長辺(読取可能な範囲の長辺)
CR…読取中心(読取可能な範囲の中心)
d、d1、d2…光軸間距離
f、f1、f2…オフセット量
GA…ガイドマーカ
JS…受光センサの受光軸
JSD…下側受光センサの受光軸(第2の受光センサの受光軸)
JSL…左側受光センサの受光軸(第2の受光センサの受光軸)
JSR…右側受光センサの受光軸(第1の受光センサの受光軸)
JSU…上側受光センサの受光軸(第1の受光センサの受光軸)
JL…結像レンズの光軸
JLD…下側結像レンズの光軸(第2の結像レンズの光軸)
JLL…左側結像レンズの光軸(第2の結像レンズの光軸)
JLR…右側結像レンズの光軸(第1の結像レンズの光軸)
JLU…上側結像レンズの光軸(第1の結像レンズの光軸)
JM…マーカ光源の発光軸
JZ…読取光学系の光軸
KL、KL1、KL1’、KL2、KL2’…仮想線
KP…仮想面
LB…レーザ光
Lf…照射光
Lr…反射光
M…マーカ光
m、m1、m2…物体距離
n、n1、n2…結像距離
P…結像レンズの主点
PD…下側結像レンズの主点(第2の結像レンズの主点)
PL…左側結像レンズの主点(第2の結像レンズの主点)
PR…右側結像レンズの主点(第1の結像レンズの主点)
PU…上側結像レンズの主点(第1の結像レンズの主点)
Q…二次元コード(情報コード)
R…読取対象物(表示媒体)
【技術分野】
【0001】
本発明は、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光を発する光学的情報読取装置に関するものである。
【背景技術】
【0002】
従来より、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光を発する光学的情報読取装置として、例えば、下記特許文献1の図16に開示されるものがある。
【0003】
この種の光学的情報読取装置では、読取対象に向けてマーカ光を発するマーカ光学系光軸(P)と、読取対象に反射した反射光を受光する受光光学系の読取光軸(O)と、が互いにずれて位置していることから、例えば、当該光学的情報読取装置に適した読取距離で両光軸が交差するように、マーカ光学系を構成する光学素子(6)を結像光学素子(2)の上部にやや斜め下向きに配設している(下記特許文献1;段落0003,0004、図16)。
【特許文献1】特開2006−330987号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、このように構成される光学的情報読取装置によると、受光光学系の読取光軸(O)に対して微小な角度θでマーカ光の光軸(P)を交差する構成を採る必要上、例えば、(1) 受光光学系とマーカ光学系をそれぞれ別の支持部材(例えばプリント配線基板)に取り付けたり、(2) 受光光学系とマーカ光学系を同じ支持部材に取り付ける場合には、いずれか一方に角度θを持たせるためにこのような角度の取付面のあるスペーサ等を介在させて支持部材に取り付ける、ことが余儀なくされていた。
【0005】
このため、上記(1),(2) のいずれの場合においても、部品点数や組付工数が増加するばかりでなく、これらを組み付けた後の工程で、受光光学系の読取光軸(O)とマーカ光の光軸(P)とが角度θで交差するように、少なくとも一方の光軸角度を微小な角度θに調整する調整工数が必要となり、その分の工数が増加するという問題が発生する。
【0006】
本発明は、上述した課題を解決するためになされたものであり、その目的とするところは、部品点数を削減するとともに組付工数および調整工数をも削減し得る光学的情報読取装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、特許請求の範囲に記載の請求項1の光学的情報読取装置では、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を結像レンズを介して受光する受光センサと、前記マーカ光源の発光軸と前記受光センサの受光軸とが平行になるように前記マーカ光源および前記受光センサを支持する支持部材と、を備え、前記マーカ光源の発光軸と前記結像レンズの光軸との間の距離を光軸間距離d、前記情報コードと前記結像レンズの主点との間の距離を物体距離m、前記結像レンズの主点と前記受光センサの受光面との間の距離を結像距離n、とすると、前記受光センサは、前記結像レンズの光軸に対して前記受光センサの受光軸が前記マーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置していることを技術的特徴とする。
【0008】
特許請求の範囲に記載の請求項2の光学的情報読取装置では、請求項1記載の光学的情報読取装置において、前記読取可能な範囲が長方形状をなす場合、前記結像レンズの光軸と前記マーカ光源の発光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを技術的特徴とする。
【0009】
特許請求の範囲に記載の請求項3の光学的情報読取装置では、請求項1または2記載の光学的情報読取装置において、前記支持部材は、前記マーカ光源および前記受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、前記マーカ光源の発光軸および前記受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源および前記受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを技術的特徴とする。
【0010】
特許請求の範囲に記載の請求項4の光学的情報読取装置では、表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を第1の結像レンズを介して受光する第1の受光センサと、前記情報コードに反射した反射光を第2の結像レンズを介して受光する第2の受光センサと、前記マーカ光源の発光軸と前記第1の受光センサの受光軸と前記第2の受光センサの受光軸とがそれぞれ互いに平行になるように前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサを支持する支持部材と、を備え、前記マーカ光源の発光軸と前記第1の結像レンズの光軸との間の距離を光軸間距離d1、前記情報コードと前記第1の結像レンズの主点との間の距離を物体距離m1、前記第1の結像レンズの主点と前記第1の受光センサの受光面との間の距離を結像距離n1、とすると、前記第1の受光センサは、前記第1の結像レンズの光軸に対して前記第1の受光センサの受光軸が前記マーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置しており、前記マーカ光源の発光軸と前記第2の結像レンズの光軸との間の距離を光軸間距離d2、前記情報コードと前記第2の結像レンズの主点との間の距離を物体距離m2、前記第2の結像レンズの主点と前記第2の受光センサの受光面との間の距離を結像距離n2、とすると、前記第2の受光センサは、前記第2の結像レンズの光軸に対して前記第2の受光センサの受光軸が前記マーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置していることを技術的特徴とする。
【0011】
特許請求の範囲に記載の請求項5の光学的情報読取装置では、請求項4記載の光学的情報読取装置において、前記読取可能な範囲が長方形状をなす場合、前記第1の結像レンズの光軸と前記第2の結像レンズの光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを技術的特徴とする。
【0012】
特許請求の範囲に記載の請求項6の光学的情報読取装置では、請求項4または5記載の光学的情報読取装置において、前記支持部材は、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、前記マーカ光源の発光軸、前記第1の受光センサの受光軸および前記第2の受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを技術的特徴とする。
【発明の効果】
【0013】
請求項1の発明では、支持部材により、マーカ光源の発光軸と受光センサの受光軸とが平行になるようにマーカ光源および受光センサを支持し、マーカ光源の発光軸と結像レンズの光軸との間の距離を光軸間距離d、情報コードと結像レンズの主点との間の距離を物体距離m、結像レンズの主点と受光センサの受光面との間の距離を結像距離n、とすると、受光センサは、結像レンズの光軸に対して受光センサの受光軸がマーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置している。
【0014】
即ち、情報コードと結像レンズの主点との間の距離を物体距離m、結像レンズの主点と受光センサの受光面との間の距離を結像距離nとすると、情報コード(物体)と受光面上の結像(像)との間の物像距離は、物体距離mと結像距離nとの和(m+n)となり、また結像レンズの倍率は、結像距離nを物体距離mで除した値(n/m)になる。このため、マーカ光源の発光軸と結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離dとすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d×n/m」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0015】
これにより、「d×n/m」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように受光センサを配置することによって、マーカ光源の発光軸と受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。このように「d×n/m」で求められるオフセット量fだけマーカ光源から離れる方向にシフトした位置に受光面が位置するように受光センサを配置することで、マーカ光源の発光軸と受光センサの受光軸とを互いに交差する構成を採る必要がないことから、マーカ光源および受光センサをそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて支持部材に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0016】
請求項2の発明では、読取可能な範囲が長方形状をなす場合、結像レンズの光軸とマーカ光源の発光軸とを結ぶ仮想線は、読取可能な範囲の短辺にほぼ平行に位置する位置関係にある。これにより、当該仮想線が読取可能な範囲の長辺にほぼ平行に位置する位置関係にある場合に比べ、マーカ光源の発光軸と結像レンズの光軸との間の光軸間距離dが短くなるため、「d×n/m」で求められるオフセット量fを小さくすることができる。したがって、マーカ光源および受光センサを支持する支持部材の、受光センサがずれて位置する方向の長さを短くすることができる。
【0017】
請求項3の発明では、マーカ光源および受光センサが取り付けられているプリント配線基板には、マーカ光源および受光センサをそれぞれ駆動制御し得る回路配線が施されている。これにより、支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0018】
請求項4の発明では、支持部材により、マーカ光源の発光軸と第1の受光センサの受光軸と第2の受光センサの受光軸とがそれぞれ互いに平行になるようにマーカ光源、第1の受光センサおよび第2の受光センサを支持している。そして、マーカ光源の発光軸と第1の結像レンズの光軸との間の距離を光軸間距離d1、情報コードと第1の結像レンズの主点との間の距離を物体距離m1、第1の結像レンズの主点と第1の受光センサの受光面との間の距離を結像距離n1、とすると、第1の受光センサは、第1の結像レンズの光軸に対して第1の受光センサの受光軸がマーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置し、マーカ光源の発光軸と第2の結像レンズの光軸との間の距離を光軸間距離d2、情報コードと第2の結像レンズの主点との間の距離を物体距離m2、第2の結像レンズの主点と第2の受光センサの受光面との間の距離を結像距離n2、とすると、第2の受光センサは、第2の結像レンズの光軸に対して第2の受光センサの受光軸がマーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置している。
【0019】
即ち、情報コードと第1の結像レンズの主点との間の距離を物体距離m1、第1の結像レンズの主点と第1の受光センサの受光面との間の距離を結像距離n1、とすると、情報コード(物体)と第1の受光センサの受光面上の結像(像)との間の物像距離は、物体距離m1と結像距離n1との和(m1+n1)となり、また結像レンズの倍率は、結像距離n1を物体距離m1で除した値(n1/m1)になる。このため、マーカ光源の発光軸と第1の結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離d1とすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って第1の受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d1×n1/m1」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0020】
同様に、情報コードと第2の結像レンズの主点との間の距離を物体距離m2、第2の結像レンズの主点と第2の受光センサの受光面との間の距離を結像距離n2、とすると、情報コード(物体)と第2の受光センサの受光面上の結像(像)との間の物像距離は、物体距離m2と結像距離n2との和(m2+n2)となり、また結像レンズの倍率は、結像距離n2を物体距離m2で除した値(n2/m2)になる。このため、マーカ光源の発光軸と第2の結像レンズの光軸とが一致することなく、互いにずれて位置しているときには、これらの光軸間の距離を光軸間距離d2とすると、マーカ光源の発光軸と情報コードとの交点から結像レンズの主点を通って第1の受光センサの受光面に至るまでの軸、つまり読取光学系の光軸は、「d2×n2/m2」で求められる距離だけマーカ光源から離れる方向にシフトした位置で受光面に交わる。
【0021】
これにより、「d1×n1/m1」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第1の受光センサを配置することによって、マーカ光源の発光軸と第1の受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。また、「d2×n2/m2」で求められる距離だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第2の受光センサを配置することによって、マーカ光源の発光軸と第2の受光センサの受光軸とが平行になるような位置関係にあっても、結像レンズの主点を通る読取光学系の光軸をマーカ光源の発光軸と情報コードとの交点に合わせることができる。このように「d1×n1/m1」で求められるオフセット量f1だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第1の受光センサを配置し、「d2×n2/m2」で求められるオフセット量f2だけマーカ光源から離れる方向にシフトした位置に受光面が位置するように第2の受光センサを配置することで、マーカ光源の発光軸と第1の受光センサの受光軸とを互いに交差する構成や、マーカ光源の発光軸と第2の受光センサの受光軸とを互いに交差する構成を採る必要がない。
【0022】
このため、マーカ光源、第1の受光センサおよび第2の受光センサをそれぞれ別の支持部材に取り付けたり、これらのいずれかに角度θを持たせるためのスペーサ等を介在させて支持部材に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。また、マーカ光源を挟んで、第1の受光センサおよび第2の受光センサが配置されているので、同一の読取対象に対して異なった角度で読み取ることができる。このため、例えば、第1の受光センサに対しては、情報コードに反射した反射光が鏡面反射になっても、第2の受光センサは異なった角度に位置するので、鏡面反射ではない反射光を受光することができる。
【0023】
請求項5の発明では、読取可能な範囲が長方形状をなす場合、第1の結像レンズの光軸と第2の結像レンズの光軸とを結ぶ仮想線は、読取可能な範囲の短辺にほぼ平行に位置する位置関係にある。これにより、当該仮想線が読取可能な範囲の長辺にほぼ平行に位置する位置関係にある場合に比べ、マーカ光源の発光軸と第1の結像レンズの光軸との間の光軸間距離d1が短くなるため、「d1×n1/m1」で求められるオフセット量f1を小さくすることができ、またマーカ光源の発光軸と第2の結像レンズの光軸との間の光軸間距離d2が短くなるため、「d2×n2/m2」で求められるオフセット量f2を小さくすることができる。したがって、マーカ光源、第1の受光センサおよび第2の受光センサを支持する支持部材の、第1の受光センサや第2の受光センサがずれて位置する方向の長さを短くすることができる。
【0024】
請求項6の発明では、マーカ光源、第1の受光センサおよび第2の受光センサが取り付けられているプリント配線基板には、マーカ光源、第1の受光センサおよび第2の受光センサをそれぞれ駆動制御し得る回路配線が施されている。これにより、支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の光学的情報読取装置を二次元コードリーダに適用した実施形態を各図に基づいて説明する。
【0026】
[第1実施形態]
本発明の第1実施形態を図1〜図5を参照して説明する。まず、本第1実施形態に係る二次元コードリーダ10の構成を図1〜図4に基づいて説明する。
【0027】
なお、図1には、二次元コードリーダ10の構成概要を示す説明図(同(A):部分縦断面図、同(B):部分横断面図)が図示されている。また図2には、二次元コードリーダ10を構成する制御系ユニット基板15および光学系ユニット基板16の回路構成等を示すブロック図が図示されており、そのうちの光学系ユニット基板16の構成例を示す説明図が図3に図示されている(同(A):正面図、同(B):3B線断面図)。図3(A) に記載された上下左右の4方向を示す矢印は、使用者により使用可能に把持された二次元コードリーダ10から出射されるマーカ光Mの出射方向を「前方向」(図3の紙面垂直上方向)とした場合における当該光学系ユニット基板16の各方向を示すものである。また、図4には、光学系ユニット基板16のマーカ光学系25から照射されるマーカ光Mと読取可能範囲ARとの関係等が図示されている。
【0028】
図1(A) および図1(B) に示すように、二次元コードリーダ10は、丸みを帯びた薄型のほぼ矩形箱状なすハウジング本体11と、このハウジング本体11の下面ほぼ中央後端寄りにハウジング本体11に一体に形成されるグリップ部12と、からなるガンタイプのハウジングを備えている。このグリップ部12は、使用者が片手で把持可能な程度の外径に設定されており、当該グリップ部12を握った使用者の人差し指が当接する部位に、後述する照明光の出射を指示するトリガスイッチ14が設けられている。
【0029】
ハウジング本体11の内部には、後述する制御系ユニット基板15や光学系ユニット基板16が収容されており、またハウジング本体11の先端部には、当該光学系ユニット基板16から発せられる照明光やマーカ光Mの出射を可能にしたり、反射光の入射を可能にする読取口11aが形成されている。
【0030】
図1〜図3に示すように、制御系ユニット基板15に実装される回路部20は、主に、読取光学系21、マーカ光学系25、照明光源29等の光学系と、メモリ35、制御回路40、操作スイッチ42、液晶表示器46等のマイクロコンピュータ(以下「マイコン」という)系と、電源スイッチ41、電池49等の電源系と、から構成されている。これらは、前述した制御系ユニット基板15や光学系ユニット基板16に実装あるいはハウジング本体11内に内装されている。
【0031】
図1および図3に示すように、読取光学系21は、鏡筒22、結像レンズ23および受光センサ24から構成され、結像レンズ23を介して入射する入射光を受光センサ24の受光面24aで受光可能に光学系ユニット基板16に実装されている。
【0032】
即ち、結像レンズ23は、読取対象物Rに反射し読取口11aを介して入射する反射光Lr(入射光)を集光して受光センサ24の受光面24aに像を結像可能にし、鏡筒22は、このような結像レンズ23をその光軸(レンズ軸)JLが基板表面16aに垂直に位置するように支持している(図3(B) 参照)。なお、この読取対象物Rには、情報コードとして二次元コード(QRコード、データマトリックスやマキシコード、PDF417、ベリコード、CPコード、カルラコード等)Qが貼付されている。
【0033】
受光センサ24は、読取対象物Rや二次元コードQに照射されて反射した反射光Lrを受光可能に構成されるもので、例えば、C−MOSやCCD等の固体撮像素子である。本実施形態の場合、情報コードとして二次元コードQを読み取るため、複数の受光素子が長方形状の矩形範囲に配置されて構成される受光面24aを有する、いわゆるエリアセンサを用いており、その受光軸JS(例えば複数の受光素子が長方形状の矩形範囲に配置される場合、受光面24aに対して前述の交点を垂直に通る軸)が光学系ユニット基板16の基板表面16aに対してほぼ垂直になるように実装されている(図3(B) 参照)。なお、受光センサ24は、受光面24aが正方形状に構成されるエリアセンサであっても良い。
【0034】
本第1実施形態では、この受光センサ24は、その受光面24aがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24aの受光中心(例えば、複数の受光素子が長方形状の矩形範囲に配置される場合、当該矩形の対角線の交点)が後述するオフセット量fだけ、二次元コードリーダ10の下側にずれて位置するように、光学系ユニット基板16に実装されている(図3(A) 参照)。これにより、受光センサ24は、その受光軸JSが結像レンズ23の結像レンズの光軸JLに対して後述するオフセット量fだけ、二次元コードリーダ10の下側にずれて位置する。
【0035】
マーカ光学系25は、ホルダ26、ホログラム27およびマーカ光源28から構成されており、読取対象物Rに対して読取可能範囲を明示し得るマーカ光Mを発する機能を有するもので、これらは光学系ユニット基板16に実装されている。なお、マーカ光源28も、光学系ユニット基板16の基板表面16aに対してその発光軸JMがほぼ垂直になるように実装されている(図3(B) 参照)。つまり、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとは、平行に位置している。
【0036】
即ち、図3および図4に示すように、ホログラム27は、マーカ光源28から照射されて入射するレーザ光LBを、読取可能範囲ARについてガイドマーカGAを投射可能なマーカ光Mを出射し得るホログラムプレートで、レーザ光LBを回折させてこのようなマーカ光Mを生成可能な回折格子が形成されている。そして、ホルダ26は、このような回折格子にレーザ光LBが入射し得るようにホログラム27を支持している。マーカ光源28は、レーザダイオード(例えばInGaAlPレーザを出力するもの)により構成されている。
【0037】
照明光源29は、読取対象物Rに照射される照射光Lfを発光可能な機能を有するもので、複数個の赤色のLEDとこれらのLEDの出射側に設けられる図略の拡散レンズ等とから構成されている。図3(A) に示すように、照明光源29は、例えば、結像レンズ23および受光センサ24の両側を直線状に囲むように配置された10個のLEDにより構成されており、ハウジング本体11の読取口11aを介して読取対象物Rに向けて照明光Lfを照射可能に実装されている。
【0038】
なお、読取光学系21を構成する結像レンズ23および受光センサ24と、マーカ光学系25を構成するホログラム27およびマーカ光源28と、の位置関係を模式的に図示すると、図4に示されるように表される。即ち、マーカ光源28の発光軸JMと二次元コードQとの交点にあたる読取中心CR(読取可能範囲ARの中心)から結像レンズ23の主点を通って受光センサ24の受光面24aに至るまでの軸、つまり読取光学系21の光軸JZと、マーカ光源28の発光軸JMとは、同一の仮想面KPに含まれ、さらにこの仮想面KPには、読取中心CRを通る読取可能範囲ARの縦方向中心線LVが含まれる。
【0039】
このように光学系を構成することにより、図5に示すように、マーカ光源28の発光軸JMと結像レンズ23の光軸JLとの間の距離を光軸間距離d、二次元コードQ(読取対象物R)と結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n、とすると、前述した受光センサ24のオフセット量fは、d×n/mで求められる値に設定されている。なお、図5には、結像レンズ23、受光センサ24、マーカ光学系25、読取対象物R、の距離関係等を示す説明図が図示されている。
【0040】
即ち、二次元コードQ(物体)と受光センサ24の受光面24a上の結像(像)との間の物像距離は、物体距離mと結像距離nとの和(m+n)となり、また結像レンズ23の倍率は、結像距離nを物体距離mで除した値(n/m)になることから、結像レンズ23の共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから結像レンズ23の主点Pを通って受光センサ24の受光面24aに至るまでの軸、つまり読取光学系21の光軸JZは、「d×n/m」で求められる距離fだけマーカ光源28から離れる方向にシフトした位置で受光面24aに交わる。
【0041】
このため、オフセット量f(=d×n/m)だけマーカ光源28から離れる方向にシフトした位置に、受光面24aの受光中心またはその周囲が位置するように受光センサ24を配置することによって、図3(B) に示すように、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるような位置関係でマーカ光源28および受光センサ24が光学系ユニット基板16に実装されていても、物像距離(m+n)において、結像レンズ23の主点Pを通る読取光学系21の光軸JZをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0042】
これにより、このような位置関係で、マーカ光源28、結像レンズ23および受光センサ24をそれぞれ光学系ユニット基板16の基板上に配置することで、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが微小角度θで交差するような構成を採ることなく、物像距離(m+n)における読取可能範囲ARとガイドマーカGAで囲まれた範囲とをほぼ一致させることができる。
【0043】
なお、光学系ユニット基板16にマーカ光源28や受光センサ24を直接実装する場合には、光学系ユニット基板16に電子部品を自動的に実装するマウンタ装置によって高精度に位置決めされ、また結像レンズ23は鏡筒22を介して光学系ユニット基板16に実装されるため、結像レンズ23、受光センサ24およびマーカ光源28の位置関係はほとんど一義的に決定される。このため、これらの位置関係の微調整は要しない。
【0044】
したがって、読取光学系21(鏡筒22、結像レンズ23、受光センサ24)とマーカ光学系25(ホルダ26、ホログラム27、マーカ光源28)とを、それぞれ別の支持部材(例えば、サブ基板やハウジング本体11の内側に形成される支持ポストや凸部等)に取り付けたり、これらの受光センサ24およびマーカ光源28のいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板16に取り付ける必要がないので、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0045】
なお、本第1実施形態では、図5に示すように、読取可能範囲ARが長辺ALおよび短辺ASからなる長方形状をなすことから、結像レンズ23の光軸JLとマーカ光源28の発光軸JMとを結ぶ仮想線KLが、読取可能範囲ARの短辺ASにほぼ平行に位置するように、受光センサ24の実装位置をマーカ光源28から離れる方向で二次元コードリーダ10の下側にオフセット量fだけずれて位置するように設定している。
【0046】
これにより、当該仮想線KLが読取可能範囲ARの長辺ALにほぼ平行に位置する位置関係にある場合に比べて、マーカ光源28の発光軸JMと結像レンズ23の光軸JLとの間の光軸間距離dが短くなるため、受光センサ24のオフセット量fを小さくすることができ、光学系ユニット基板16の受光センサ24がずれて位置する方向の長さを短くすることができる。つまり、二次元コードリーダ10においては、その上下方向の長さを短くできるので、ハウジング本体11の厚さを薄くすることが可能となる。
【0047】
次に、図2に戻ってマイコン系の構成概要を説明する。マイコン系は、増幅回路31、A/D変換回路33、メモリ35、アドレス発生回路36、同期信号発生回路38、制御回路40、操作スイッチ14,42、LED43、ブザー44、液晶表示器46、通信インタフェース48等から構成されている。このマイコン系は、その名の通り、マイコンとして機能し得る制御回路40およびメモリ35を中心に構成される。
【0048】
光学系の受光センサ24から出力される画像信号は、増幅回路31に入力されることで所定ゲインで増幅された後、A/D変換回路33に入力されると、アナログ信号からディジタル信号に変換される。そして、ディジタル化された画像信号、つまり画像データは、メモリ35に入力されると、画像データ蓄積領域に蓄積される。なお、同期信号発生回路38は、受光センサ24およびアドレス発生回路36に対する同期信号を発生可能に構成されており、またアドレス発生回路36は、この同期信号発生回路38から供給される同期信号に基づいて、メモリ35に格納される画像データの格納アドレスを発生可能に構成されている。
【0049】
メモリ35は、半導体メモリ装置で、例えばRAM(DRAM、SRAM等)やROM(EPROM、EEPROM等)がこれに相当する。このメモリ35のうちのRAMには、前述した画像データ蓄積領域のほかに、制御回路40が算術演算や論理演算等の各処理時に利用する作業領域等も確保可能に構成されている。またROMには、後述するデコード処理等を実行可能な所定プログラムやその他、受光センサ24、マーカ光源28、照明光源29等の各ハードウェアを制御可能なシステムプログラム等が予め格納されている。
【0050】
制御回路40は、二次元コードリーダ10全体を制御可能なマイコンで、CPU、システムバス、入出力インタフェース等からなり、メモリ35とともに情報処理装置を構成し得るもので情報処理機能を有する。この制御回路40には、内蔵された入出力インタフェースを介して種々の入出力装置と接続可能に構成されており、本実施形態の場合、電源スイッチ41、操作スイッチ42(トリガスイッチ14)、LED43、ブザー44、液晶表示器46、通信インタフェース48等が接続されている。
【0051】
これにより、例えば、電源スイッチ41や操作スイッチ42、トリガスイッチ14の監視や管理、またインジケータとして機能するLED43の点灯・消灯、ビープ音やアラーム音を発生可能なブザー44の鳴動のオンオフ、さらには読み取った二次元コードQによるコード内容を画面表示可能な液晶表示器46の画面制御や外部装置とのシリアル通信を可能にする通信インタフェース48の通信制御等を可能にしている。なお、通信インタフェース48に接続される外部装置には、当該二次元コードリーダ10の上位システムに相当するホストコンピュータ等が含まれる。
【0052】
電源系は、電源スイッチ41、電池49等により構成されており、制御回路40により管理される電源スイッチ41のオンオフによって、上述した各装置や各回路に、電池49から供給される駆動電圧の導通や遮断が制御されている。なお、電池49は、所定の直流電圧を発生可能な二次電池で、例えば、リチウムイオン電池等がこれに相当する。
【0053】
このように二次元コードリーダ10を構成することにより、例えば、電源スイッチ41がオンされて所定の自己診断処理等が正常終了し、二次元コードQの読み取りが可能な状態になると、制御回路40が照明光Lfの発光を指示するトリガスイッチ14の入力を受け付けるとともに、同期信号を基準に所定周期で発光信号をマーカ光源28に出力する。
【0054】
これによって、発光信号を受けたマーカ光源28は、レーザダイオードを間欠的に発光させてホログラム27を介してマーカ光Mを発するため、使用者が当該二次元コードリーダ10の読取口11aを読取対象物Rに向けることで、例えば、図4に示すように、マーカ光Mが読取対象物Rに照射されて映る。
【0055】
即ち、マーカ光Mにより映し出されるガイドマーカGAによって囲まれる範囲が、読取可能範囲ARが当該二次元コードリーダ10の使用者に明示されるとともに、その範囲のほぼ中央に位置する読取中心CRが当該使用者に明示される。このため、当該使用者は、ガイドマーカGAにより、読取可能範囲ARとその読取中心CRを把握することができるので、読取対象物Rに貼付や印刷された二次元コードQに対して読取口11aの向きを合わせることが可能となる。
【0056】
そして、使用者がトリガスイッチ14をオンにすることによって、制御回路40が同期信号を基準に照明光源29に発光信号を出力するので、当該発光信号を受けた照明光源29は照明光Lfを照射し、照射された照明光Lfが二次元コードQ等に反射するとその反射光Lrが読取口11aを介して結像レンズ23に入射する。このため、受光センサ24の受光面24aには、二次元コードQの像が結像されるので、上述したマイコン系により画像処理された後、画像データとしてメモリ35を介して、デコード処理に渡される。メモリ35から当該画像データを取り出した制御回路40は、所定のデコード処理によって当該画像データをデコードしデコードデータとして外部に出力する。
【0057】
以上説明したように、本第1実施形態に係る二次元コードリーダ10では、図1〜図5に示すように、光学系ユニット基板16によりマーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるようにマーカ光源28および受光センサ24を支持する。そして、結像レンズ23の光軸JLに対して受光センサ24の受光軸JSがマーカ光源28から離れる方向に「d×n/m」(発光軸JMと光軸JLとの間の距離を光軸間距離d、二次元コードQと結像レンズ23の主点Pとの間の距離を物体距離m、結像レンズ23の主点Pと受光センサ24の受光面24aとの間の距離を結像距離n)で表されるオフセット量fだけ、ずれるように、受光センサ24を光学系ユニット基板16に実装した。
【0058】
これにより、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとが平行になるような位置関係にあっても、結像レンズ23の主点Pを通る読取光学系21の光軸JZをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。このため、マーカ光源28の発光軸JMと受光センサ24の受光軸JSとを互いに交差する構成を採る必要がないことから、マーカ光源28および受光センサ24をそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板16に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0059】
また、マーカ光源28および受光センサ24が取り付けられている光学系ユニット基板16には、前述したように、これらをそれぞれ駆動制御し得る回路配線が施されているため、このような光学系ユニット基板16ではない他の支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0060】
[第2実施形態]
次に、本発明の第2実施形態を図6〜図10を参照して説明する。本第2実施形態に係る二次元コードリーダ50は、読取光学系21を2セット備え、マーカ光学系25の右側(マーカ光Mの出射方向を「前方向」とした場合の右方向側)に右側読取光学系21R、マーカ光学系25の左側(マーカ光Mの出射方向を「前方向」とした場合の左方向側)に左側読取光学系21Lを、それぞれ設けている点が、読取光学系21を1セットしか備えない第1実施形態に係る二次元コードリーダ10と異なる。そのため、他の構成部分については、第1実施形態の二次元コードリーダ10と実質的に同一であるので、これらの部分には同一符号を付して説明を省略する。まず、本第2実施形態に係る二次元コードリーダ50の構成を図6〜図8に基づいて説明する。
【0061】
なお、図6には、二次元コードリーダ50の構成概要を示す説明図(同(A):部分縦断面図、同(B):部分横断面図)が図示されている。また図7には、二次元コードリーダ50を構成する制御系ユニット基板55および光学系ユニット基板56の回路構成等を示すブロック図が図示されており、そのうちの光学系ユニット基板56の構成例を示す説明図が図8に図示されている(同(A):正面図、同(B):8B線断面図)。図8(A) に記載された上下左右の4方向を示す矢印は、使用者により使用可能に把持された二次元コードリーダ50から出射されるマーカ光Mの出射方向を「前方向」(図8の紙面垂直上方向)とした場合における当該光学系ユニット基板56の各方向を示すものである。
【0062】
図6(A) および図6(B) に示すように、ハウジング本体11の内部には、制御系ユニット基板55や光学系ユニット基板56が収容されている。これらの各ユニット基板は、当該二次元コードリーダ50が読取光学系21を2セット備えている点で、前述した二次元コードリーダ10の制御系ユニット基板15や光学系ユニット基板16と構成が異なる。
【0063】
即ち、図6(B) に示すように、右側読取光学系21Rとして、鏡筒22R、右側結像レンズ23Rおよび右側受光センサ24Rを備え、また左側読取光学系21Lとして、鏡筒22L、左側結像レンズ23Lおよび左側受光センサ24Lを備えており、図8に示すように、マーカ光学系25を中心にしてそれぞれ左右対称に光学系ユニット基板56に実装されている。
【0064】
また、図7に示すように、制御系ユニット基板55には、右側読取光学系21Rの右側受光センサ24Rから出力される画像信号を処理する増幅回路31RおよびA/D変換回路33R、また左側読取光学系21Lの左側受光センサ24Lから出力される画像信号を処理する増幅回路31LおよびA/D変換回路33L、そしてこれらのA/D変換回路33R,33Lから出力されるディジタル信号を処理する制御回路40、メモリ35等が、回路部50として実装されている。
【0065】
なお、図8に示すように、右側の鏡筒22Rおよび左側の鏡筒22L(以下、左右両側の鏡筒を総称する場合には「両鏡筒22R・22L」という)、右側結像レンズ23Rおよび左側結像レンズ23L(以下、左右両側の結像レンズを総称する場合には「両結像レンズ23R・23L」という)、右側受光センサ24Rおよび左側受光センサ24L(以下、左右両側の受光センサを総称する場合には「両受光センサ24R・24L」という)は、それぞれ個々には、前述した二次元コードリーダ10の光学系ユニット基板16を構成する鏡筒22、結像レンズ23、受光センサ24と同様に構成されており、これらはそれぞれ光学系ユニット基板56の基板表面56aに対して、垂直に実装されている。
【0066】
また、これらは、マーカ光学系25を中心にしてそれぞれ左右対称に光学系ユニット基板56に実装されているため、前述した光学系ユニット基板16が二次元コードリーダ10の上下方向に長い長方形状であったのに対し、本第2実施形態の光学系ユニット基板56は、二次元コードリーダ50の左右方向に長い長方形状を有する。
【0067】
このため、本第2実施形態の二次元コードリーダ50では、マーカ光学系25の右側に配置される右側読取光学系21Rの右側受光センサ24Rは、図8(A) および図8(B) に示すように、その受光面24Raがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24Raの受光中心(例えば、複数の受光素子が長方形状の矩形範囲に配置される場合、当該矩形の対角線の交点)がオフセット量f1だけ、二次元コードリーダ50の右側にずれて位置するように、光学系ユニット基板56に実装されている。つまり、受光センサ24Rは、その受光軸JSRが結像レンズ23の結像レンズの光軸JLRに対してオフセット量f1だけ、二次元コードリーダ50の右側にずれて位置する。
【0068】
これに対し、マーカ光学系25の左側に配置される左側読取光学系21Lの左側受光センサ24Lは、その受光面24Laがハウジング本体11外から読取口11aを介して外観可能に、かつ受光面24Laの受光中心がオフセット量f2だけ、二次元コードリーダ50の左側にずれて位置するように、光学系ユニット基板56に実装されている。つまり、受光センサ24Lは、その受光軸JSLが結像レンズ23の結像レンズの光軸JLLに対してオフセット量f2だけ、二次元コードリーダ50の左側にずれて位置する。
【0069】
このように光学系を構成することにより、図9に示すように、マーカ光源28の発光軸JMと右側結像レンズ23Rの光軸JLRとの間の距離を光軸間距離d1、二次元コードQ(読取対象物R)と右側結像レンズ23Rの主点PRとの間の距離を物体距離m1、右側結像レンズ23Rの主点PRと右側受光センサ24Rの受光面24Raとの間の距離を結像距離n1、とすると、前述した右側受光センサ24Rのオフセット量f1は、d1×n1/m1で求められる値に設定されている。
【0070】
同様に、マーカ光源28の発光軸JMと左側結像レンズ23Lの光軸JLLとの間の距離を光軸間距離d2、二次元コードQ(読取対象物R)と左側結像レンズ23Lの主点PLとの間の距離を物体距離m2、左側結像レンズ23Lの主点PLと左側受光センサ24Lの受光面24Laとの間の距離を結像距離n2、とすると、前述した左側受光センサ24Lのオフセット量f2は、d2×n2/m2で求められる値に設定されている。
【0071】
即ち、二次元コードQ(物体)と右側受光センサ24Rの受光面24Ra上の結像(像)との間の物像距離は、物体距離m1と結像距離n1との和(m1+n1)となり、また右側結像レンズ23Rの倍率は、結像距離n1を物体距離m1で除した値(n1/m1)になる。左側結像レンズ23Lの倍率についても、同様に、結像距離n2を物体距離m2で除した値(n2/m2)になる。
【0072】
なお、本第2実施形態の場合、両受光センサ24R・24Lは、マーカ光源28を中心に左右対称に光学系ユニット基板56に実装されることから、物体距離m1とm2は同一であり、また結像距離n1とn2は同一である。このため、両結像レンズ23R・23Lの倍率は同じになることから、右側結像レンズ23Rの共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから、右側結像レンズ23Rの主点PRを通って右側受光センサ24Rの受光面24Raに至るまでの軸、つまり右側読取光学系21Rの光軸JZRは、「d1×n1/m1」で求められる距離f1だけマーカ光源28から右側に離れる方向にシフトした位置で受光面24Raに交わる。
【0073】
したがって、右側受光センサ24Rについては、オフセット量f1(=d1×n1/m1)だけマーカ光源28から右側に離れる方向にシフトした位置に、受光面24Raの受光中心またはその周囲が位置するように配置することにより、図8(B) に示すように、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRとが平行になるような位置関係でマーカ光源28および右側受光センサ24Rが光学系ユニット基板56に実装されていても、物像距離(m1+n1)において、右側結像レンズ23Rの主点PRを通る右側読取光学系21Rの光軸JZRをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0074】
これに対し、左側結像レンズ23Lの共役関係が成立する場合において、マーカ光源28の発光軸JMと二次元コードQ(読取対象物R)との交点にあたる読取中心CRから、左側結像レンズ23Lの主点PLを通って左側受光センサ24Lの受光面24Laに至るまでの軸、つまり左側読取光学系21Lの光軸JZLは、「d2×n2/m2」で求められる距離f2だけマーカ光源28から左側に離れる方向にシフトした位置で受光面24Laに交わる。
【0075】
したがって、左側受光センサ24Lについては、オフセット量f2(=d2×n2/m2)だけマーカ光源28から左側に離れる方向にシフトした位置に、受光面24Laの受光中心またはその周囲が位置するように配置することにより、図8(B) に示すように、マーカ光源28の発光軸JMと左側受光センサ24Lの受光軸JSLとが平行になるような位置関係でマーカ光源28および左側受光センサ24Lが光学系ユニット基板56に実装されていても、物像距離(m2+n2)において、左側結像レンズ23Lの主点PLを通る左側読取光学系21Lの光軸JZLをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。
【0076】
これにより、このような位置関係で、マーカ光源28、両結像レンズ23R・23L、両受光センサ24R・24Lをそれぞれ光学系ユニット基板56の基板上に配置することで、マーカ光源28の発光軸JMと両受光センサ24R・24Lの受光軸JSR,JSLとが微小角度θで交差するような構成を採ることなく、物像距離における読取可能範囲ARとガイドマーカGAで囲まれた範囲とをほぼ一致させることができる。
【0077】
なお、光学系ユニット基板56にマーカ光源28、両受光センサ24R・24Lを直接実装する場合には、光学系ユニット基板56に電子部品を自動的に実装するマウンタ装置によって高精度に位置決めされ、また右側結像レンズ23Rは鏡筒22Rを介して、また左側結像レンズ23Lは鏡筒22Lを介して、それぞれ光学系ユニット基板56に実装されるため、両結像レンズ23R・23L、両受光センサ24R・24Lおよびマーカ光源28の位置関係はほとんど一義的に決定される。このため、これらの位置関係の微調整は要しない。
【0078】
したがって、右側読取光学系21R(鏡筒22R、右側結像レンズ23R、右側受光センサ24R)と左側読取光学系21L(鏡筒22L、左側結像レンズ23L、左側受光センサ24L)とマーカ光学系25(ホルダ26、ホログラム27、マーカ光源28)とを、それぞれ別の支持部材(例えば、サブ基板やハウジング本体11の内側に形成される支持ポストや凸部等)に取り付けたり、両受光センサ24R・24Lおよびマーカ光源28のいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板56に取り付ける必要がないので、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0079】
なお、本第2実施形態では、図9に示すように、読取可能範囲ARが長辺ALおよび短辺ASからなる長方形状をなすことから、右側結像レンズ23Rの光軸JLRとマーカ光源28の発光軸JMとを結ぶ仮想線KL1が、読取可能範囲ARの長辺ALにほぼ平行に位置するように、右側受光センサ24Rの実装位置をマーカ光源28から離れる方向で二次元コードリーダ50の右側にオフセット量f1だけずれて位置するように設定している。同様に、左側結像レンズ23Lの光軸JLLとマーカ光源28の発光軸JMとを結ぶ仮想線KL2が、読取可能範囲ARの長辺ALにほぼ平行に位置するように、左側受光センサ24Lの実装位置をマーカ光源28から離れる方向で二次元コードリーダ50の左側にオフセット量f2だけずれて位置するように設定している。
【0080】
これにより、当該仮想線KL1,KL2が読取可能範囲ARの短辺ASにほぼ平行に位置する位置関係にある場合に比べて、当該右側受光センサ24Rが実装される光学系ユニット基板56の幅を二次元コードリーダ10の上下方向に拡げる必要がないので、その分、ハウジング本体11の厚さを薄くすることが可能となる。
【0081】
また、図10に示すように、二次元コードリーダ50の上下方向に長い長方形状の光学系ユニット基板56’を用いる場合においては、上側受光センサ24Uをマーカ光源28から離れる方向で二次元コードリーダ50の上側にオフセット量f1だけずれて位置するように光学系ユニット基板56’に実装し、下側受光センサ24Dをマーカ光源28から離れる方向で二次元コードリーダ50の下側にオフセット量f2だけずれて位置するように光学系ユニット基板56’に実装することになる。
【0082】
このような場合には、上側結像レンズ23Uの光軸JLUとマーカ光源28の発光軸JMとを結ぶ仮想線KL1’が、読取可能範囲ARの短辺ASにほぼ平行に位置するように、上側受光センサ24Uの実装位置を上側にオフセット量f1だけずれて設定し、また下側結像レンズ23Dの光軸JLDとマーカ光源28の発光軸JMとを結ぶ仮想線KL2’が、読取可能範囲ARの短辺ASにほぼ平行に位置するように、下側受光センサ24Dの実装位置を下側にオフセット量f2だけずれて設定する。
【0083】
これにより、当該仮想線KL1’,KL2’が読取可能範囲ARの長辺ALにほぼ平行に位置する位置関係にある場合に比べて、マーカ光源28の発光軸JMと上側結像レンズ23Uの光軸JLUとの間の光軸間距離d1’が短くなるため、上側受光センサ24Uのオフセット量f1を小さくすることができ、またマーカ光源28の発光軸JMと下側結像レンズ23Dの光軸JLDとの間の光軸間距離d2’が短くなるため、下側受光センサ24Dのオフセット量f2を小さくすることができる。
【0084】
このため、このような場合においても、光学系ユニット基板56’の上側受光センサ24Uや下側受光センサ24Dがずれて位置する方向の長さ、つまり二次元コードリーダ50においては、その上下方向の長さを短くできるので、ハウジング本体11の厚さを薄くすることが可能となる。
【0085】
以上説明したように、本第2実施形態に係る二次元コードリーダ50では、図6〜図10に示すように、光学系ユニット基板56により、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRと左側受光センサ24Lの受光軸JSLとがそれぞれ互いに平行になるようにマーカ光源28、右側受光センサ24Rおよび左側受光センサ24Lを支持する。そして、右側結像レンズ23Rの光軸JLRに対して右側受光センサ24Rの受光軸JSRがマーカ光源28から離れる方向に「d1×n1/m1」(発光軸JMと光軸JLRとの間の距離を光軸間距離d1、二次元コードQと右側結像レンズ23Rの主点PRとの間の距離を物体距離m1、右側結像レンズ23Rの主点PRと右側受光センサ24Rの受光面24Raとの間の距離を結像距離n1)で表されるオフセット量f1だけ、ずれるように右側受光センサ24Rを実装し、また左側結像レンズ23Lの光軸JLLに対して左側受光センサ24Lの受光軸JSLがマーカ光源28から離れる方向に「d2×n2/m2」(発光軸JMと光軸JLLとの間の距離を光軸間距離d2、二次元コードQと左側結像レンズ23Lの主点PLとの間の距離を物体距離m2、左側結像レンズ23Lの主点PLと左側受光センサ24Lの受光面24Laとの間の距離を結像距離n2)で表されるオフセット量f2だけ、ずれるように左側受光センサ24Lを実装した。
【0086】
これにより、マーカ光源28の発光軸JMと右側受光センサ24Rの受光軸JSRとが平行になるような位置関係にあっても、右側結像レンズ23Rの主点PRを通る右側読取光学系21Rの光軸JZRをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。また、マーカ光源28の発光軸JMと左側受光センサ24Lの受光軸JSLとが平行になるような位置関係にあっても、左側結像レンズ23Lの主点PLを通る左側読取光学系21Lの光軸JZLをマーカ光源28の発光軸JMと二次元コードQとの交点に合わせることができる。このため、マーカ光源28の発光軸JMと両受光センサ24R・24Lの受光軸JSR,JSLとを互いに交差する構成を採る必要がないことから、マーカ光源28および両受光センサ24R・24Lをそれぞれ別の支持部材に取り付けたり、これらのいずれか一方に角度θを持たせるためのスペーサ等を介在させて光学系ユニット基板56に取り付ける必要がない。したがって、部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0087】
また、マーカ光源28および両受光センサ24R・24Lが取り付けられている光学系ユニット基板56には、これらをそれぞれ駆動制御し得る回路配線が施されているため、このような光学系ユニット基板56ではない他の支持部材を別途設ける場合に比べ、部品点数を削減することができる。したがって、さらに部品点数を削減するとともに組付工数および調整工数をも削減することができる。
【0088】
さらに、マーカ光源28を挟んで、両受光センサ24R・24Lが配置されているので、同一の読取対象物Rに対して異なった角度で読み取ることができる。このため、例えば、右側受光センサ24Rに対しては、二次元コードQに反射した反射光が鏡面反射になっても、左側受光センサ24Lは異なった角度に位置するので、鏡面反射ではない反射光を受光することができる。
【図面の簡単な説明】
【0089】
【図1】本発明の第1実施形態に係る二次元コードリーダの構成を示す説明図で、図1(A) は部分縦断面を示すもの、図1(B) は部分横断面を示すもの、である。
【図2】第1実施形態の二次元コードリーダを構成する制御系ユニット基板および光学系ユニット基板の回路構成等を示すブロック図である。
【図3】第1実施形態の二次元コードリーダを構成する光学系ユニット基板の構成例を示す説明図で、図3(A) は読取口から見える正面を示すもの、図3(B) は図3(A) に示す3B線断面を示すもの、である。
【図4】光学系ユニット基板のマーカ光学系から照射されるマーカ光と読取可能範囲との関係およびマーカ光学系の発光軸と読取光学系の光軸とが同一平面内に実質的に含まれることを示す説明図である。
【図5】第1実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【図6】本発明の第2実施形態に係る二次元コードリーダの構成を示す説明図で、図6(A) は部分縦断面を示すもの、図6(B) は部分横断面を示すもの、である。
【図7】第2実施形態の二次元コードリーダを構成する制御系ユニット基板および光学系ユニット基板の回路構成等を示すブロック図である。
【図8】第2実施形態の二次元コードリーダを構成する光学系ユニット基板の構成例を示す説明図で、図8(A) は読取口から見える正面を示すもの、図8(B) は図8(A) に示す8B線断面を示すもの、である。
【図9】第2実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【図10】第2実施形態の二次元コードリーダを構成する、結像レンズ、受光センサ、マーカ光学系、読取対象物、の距離関係等を示す説明図である。
【符号の説明】
【0090】
10、50…二次元コードリーダ(光学的情報読取装置)
15…制御系ユニット基板
16、56、56’…光学系ユニット基板(支持部材、プリント配線基板)
16a、56a、56’a…基板表面(プリント配線基板の基板表面)
20、60…回路部
21…読取光学系
21D…下側読取光学系
21L…左側読取光学系
21R…右側読取光学系
21U…上側読取光学系
22、22R、22L…鏡筒
23…結像レンズ
23D…下側結像レンズ(第2の結像レンズ)
23L…左側結像レンズ(第2の結像レンズ)
23R…右側結像レンズ(第1の結像レンズ)
23U…上側結像レンズ(第1の結像レンズ)
24…受光センサ
24D…下側受光センサ(第2の受光センサ)
24L…左側受光センサ(第2の受光センサ)
24R…右側受光センサ(第1の受光センサ)
24U…上側受光センサ(第1の受光センサ)
24a…受光面
24Da…受光面(第2の受光センサの受光面)
24La…受光面(第2の受光センサの受光面)
24Ra…受光面(第1の受光センサの受光面)
24Ua…受光面(第1の受光センサの受光面)
25…マーカ光学系(マーカ光光学系)
27…ホログラム(マーカ光光学系)
28…マーカ光源(マーカ光光学系)
29…照明光源
AR…読取可能範囲(読取可能な範囲)
AS…短辺(読取可能な範囲の短辺)
AL…長辺(読取可能な範囲の長辺)
CR…読取中心(読取可能な範囲の中心)
d、d1、d2…光軸間距離
f、f1、f2…オフセット量
GA…ガイドマーカ
JS…受光センサの受光軸
JSD…下側受光センサの受光軸(第2の受光センサの受光軸)
JSL…左側受光センサの受光軸(第2の受光センサの受光軸)
JSR…右側受光センサの受光軸(第1の受光センサの受光軸)
JSU…上側受光センサの受光軸(第1の受光センサの受光軸)
JL…結像レンズの光軸
JLD…下側結像レンズの光軸(第2の結像レンズの光軸)
JLL…左側結像レンズの光軸(第2の結像レンズの光軸)
JLR…右側結像レンズの光軸(第1の結像レンズの光軸)
JLU…上側結像レンズの光軸(第1の結像レンズの光軸)
JM…マーカ光源の発光軸
JZ…読取光学系の光軸
KL、KL1、KL1’、KL2、KL2’…仮想線
KP…仮想面
LB…レーザ光
Lf…照射光
Lr…反射光
M…マーカ光
m、m1、m2…物体距離
n、n1、n2…結像距離
P…結像レンズの主点
PD…下側結像レンズの主点(第2の結像レンズの主点)
PL…左側結像レンズの主点(第2の結像レンズの主点)
PR…右側結像レンズの主点(第1の結像レンズの主点)
PU…上側結像レンズの主点(第1の結像レンズの主点)
Q…二次元コード(情報コード)
R…読取対象物(表示媒体)
【特許請求の範囲】
【請求項1】
表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、
前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を結像レンズを介して受光する受光センサと、
前記マーカ光源の発光軸と前記受光センサの受光軸とが平行になるように前記マーカ光源および前記受光センサを支持する支持部材と、を備え、
前記マーカ光源の発光軸と前記結像レンズの光軸との間の距離を光軸間距離d、前記情報コードと前記結像レンズの主点との間の距離を物体距離m、前記結像レンズの主点と前記受光センサの受光面との間の距離を結像距離n、とすると、
前記受光センサは、前記結像レンズの光軸に対して前記受光センサの受光軸が前記マーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置していることを特徴とする光学的情報読取装置。
【請求項2】
前記読取可能な範囲が長方形状をなす場合、前記結像レンズの光軸と前記マーカ光源の発光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを特徴とする請求項1記載の光学的情報読取装置。
【請求項3】
前記支持部材は、前記マーカ光源および前記受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、
前記マーカ光源の発光軸および前記受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源および前記受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを特徴とする請求項1または2記載の光学的情報読取装置。
【請求項4】
表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、
前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を第1の結像レンズを介して受光する第1の受光センサと、
前記情報コードに反射した反射光を第2の結像レンズを介して受光する第2の受光センサと、
前記マーカ光源の発光軸と前記第1の受光センサの受光軸と前記第2の受光センサの受光軸とがそれぞれ互いに平行になるように前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサを支持する支持部材と、を備え、
前記マーカ光源の発光軸と前記第1の結像レンズの光軸との間の距離を光軸間距離d1、前記情報コードと前記第1の結像レンズの主点との間の距離を物体距離m1、前記第1の結像レンズの主点と前記第1の受光センサの受光面との間の距離を結像距離n1、とすると、前記第1の受光センサは、前記第1の結像レンズの光軸に対して前記第1の受光センサの受光軸が前記マーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置しており、
前記マーカ光源の発光軸と前記第2の結像レンズの光軸との間の距離を光軸間距離d2、前記情報コードと前記第2の結像レンズの主点との間の距離を物体距離m2、前記第2の結像レンズの主点と前記第2の受光センサの受光面との間の距離を結像距離n2、とすると、前記第2の受光センサは、前記第2の結像レンズの光軸に対して前記第2の受光センサの受光軸が前記マーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置していることを特徴とする光学的情報読取装置。
【請求項5】
前記読取可能な範囲が長方形状をなす場合、前記第1の結像レンズの光軸と前記第2の結像レンズの光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを特徴とする請求項4記載の光学的情報読取装置。
【請求項6】
前記支持部材は、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、
前記マーカ光源の発光軸、前記第1の受光センサの受光軸および前記第2の受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを特徴とする請求項4または5記載の光学的情報読取装置。
【請求項1】
表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、
前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を結像レンズを介して受光する受光センサと、
前記マーカ光源の発光軸と前記受光センサの受光軸とが平行になるように前記マーカ光源および前記受光センサを支持する支持部材と、を備え、
前記マーカ光源の発光軸と前記結像レンズの光軸との間の距離を光軸間距離d、前記情報コードと前記結像レンズの主点との間の距離を物体距離m、前記結像レンズの主点と前記受光センサの受光面との間の距離を結像距離n、とすると、
前記受光センサは、前記結像レンズの光軸に対して前記受光センサの受光軸が前記マーカ光源から離れる方向に「d×n/m」で表されるオフセット量fだけ、ずれて位置していることを特徴とする光学的情報読取装置。
【請求項2】
前記読取可能な範囲が長方形状をなす場合、前記結像レンズの光軸と前記マーカ光源の発光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを特徴とする請求項1記載の光学的情報読取装置。
【請求項3】
前記支持部材は、前記マーカ光源および前記受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、
前記マーカ光源の発光軸および前記受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源および前記受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを特徴とする請求項1または2記載の光学的情報読取装置。
【請求項4】
表示媒体に投射されるガイドマーカにより情報コードを読取可能な範囲を使用者に示し得るマーカ光をマーカ光光学系を介して前記表示媒体に照射するマーカ光源と、
前記表示媒体に表示され前記読取可能な範囲内に位置する前記情報コードに反射した反射光を第1の結像レンズを介して受光する第1の受光センサと、
前記情報コードに反射した反射光を第2の結像レンズを介して受光する第2の受光センサと、
前記マーカ光源の発光軸と前記第1の受光センサの受光軸と前記第2の受光センサの受光軸とがそれぞれ互いに平行になるように前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサを支持する支持部材と、を備え、
前記マーカ光源の発光軸と前記第1の結像レンズの光軸との間の距離を光軸間距離d1、前記情報コードと前記第1の結像レンズの主点との間の距離を物体距離m1、前記第1の結像レンズの主点と前記第1の受光センサの受光面との間の距離を結像距離n1、とすると、前記第1の受光センサは、前記第1の結像レンズの光軸に対して前記第1の受光センサの受光軸が前記マーカ光源から離れる方向に「d1×n1/m1」で表されるオフセット量f1だけ、ずれて位置しており、
前記マーカ光源の発光軸と前記第2の結像レンズの光軸との間の距離を光軸間距離d2、前記情報コードと前記第2の結像レンズの主点との間の距離を物体距離m2、前記第2の結像レンズの主点と前記第2の受光センサの受光面との間の距離を結像距離n2、とすると、前記第2の受光センサは、前記第2の結像レンズの光軸に対して前記第2の受光センサの受光軸が前記マーカ光源から離れる方向に「d2×n2/m2」で表されるオフセット量f2だけ、ずれて位置していることを特徴とする光学的情報読取装置。
【請求項5】
前記読取可能な範囲が長方形状をなす場合、前記第1の結像レンズの光軸と前記第2の結像レンズの光軸とを結ぶ仮想線は、前記読取可能な範囲の短辺にほぼ平行に位置する位置関係にあることを特徴とする請求項4記載の光学的情報読取装置。
【請求項6】
前記支持部材は、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサをそれぞれ駆動制御し得る回路配線が施されたプリント配線基板であり、
前記マーカ光源の発光軸、前記第1の受光センサの受光軸および前記第2の受光センサの受光軸が前記プリント配線基板の基板表面に対して垂直に位置するように、前記マーカ光源、前記第1の受光センサおよび前記第2の受光センサが、前記回路配線に電気的に接続可能に前記プリント配線基板に取り付けられていることを特徴とする請求項4または5記載の光学的情報読取装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−42820(P2009−42820A)
【公開日】平成21年2月26日(2009.2.26)
【国際特許分類】
【出願番号】特願2007−204228(P2007−204228)
【出願日】平成19年8月6日(2007.8.6)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成21年2月26日(2009.2.26)
【国際特許分類】
【出願日】平成19年8月6日(2007.8.6)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]