
光学的検査方法および光学的検査装置
【課題】撮像装置の焦点の調整に必要な情報を設定する作業を容易にする。
【解決手段】表面に電極51が形成された透光性を有する基板50と、この基板50の電極51に異方性導電膜85を介して電気接続されることにより基板50に一体に設けられた付属物61とを具備するワークを、付属物61が接続された面とは反対の面を上に向けた状態で配置し、撮像装置10および同軸照明用の照明部13、ならびに変位センサ15を含む撮像ユニット1により撮像して、生成された画像を用いて圧痕52の状態を判別する。検査の前のティーチング処理では、圧痕52が消失した画像が生成されたときの変位センサ15の計測値を特定し、検査では、特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の高さとして、撮像ユニット1の高さを調整する。
【解決手段】表面に電極51が形成された透光性を有する基板50と、この基板50の電極51に異方性導電膜85を介して電気接続されることにより基板50に一体に設けられた付属物61とを具備するワークを、付属物61が接続された面とは反対の面を上に向けた状態で配置し、撮像装置10および同軸照明用の照明部13、ならびに変位センサ15を含む撮像ユニット1により撮像して、生成された画像を用いて圧痕52の状態を判別する。検査の前のティーチング処理では、圧痕52が消失した画像が生成されたときの変位センサ15の計測値を特定し、検査では、特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の高さとして、撮像ユニット1の高さを調整する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、異方性導電膜(ACF(Anisotropic Conductive Film))を介して接続される電極を対象に、これらの電極間の接続状態を光学的に検査する方法および装置に関する。
【背景技術】
【0002】
異方性導電膜は、微小な導電性粒子を含む粘着層が塗布されたフィルム材であって、はんだ付けが困難な部位を接続するのに用いられる。たとえば、液晶モジュールの製作において、液晶パネルを構成するガラス基板に、駆動用の回路が組み込まれたICや、ICに信号を中継するためのフレキシブルプリント基板(Flexible printed circuit ;以下「FPC」と略す。)を接続する場合に、異方性導電膜が用いられる。
【0003】
液晶パネルは、ITO膜や、クロム、アルミニウムなどの金属による薄膜状の電極パターン(以下、「基板電極」という。)が形成された2枚のガラス基板を、液晶層や配向膜などを挟んで一体にした構成のもので、一方のガラス基板に、ICやFPCが接続される。
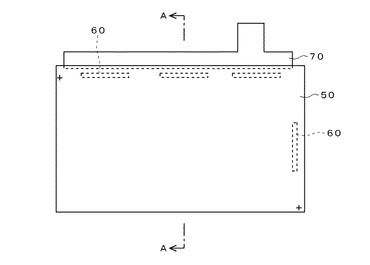
図10は、液晶パネルの全体像を、ICおよびFPCが接続された面とは反対側の面を正面にして表したものである。図中、50は、ICやFPCが接続されたガラス基板である。このガラス基板50は、図示しないもう一方のガラス基板より若干大きく、基板同士が重ね合わせられる範囲より外側(ガラス基板50の周縁部)に、複数のIC60が接続されている。また、このガラス基板50の端縁部の一辺に沿うようにして、FPC70が接続される。
【0004】
IC60には、「バンプ」と呼ばれる突起状の電極が形成され、FPC70にも、接続用の電極パターンが形成される。バンプやFPC70の電極パターンは、メッキなどにおける主要成分に金が使用された金属製の電極である。これらの電極は、いずれも異方性導電膜を介してガラス基板50側の基板電極に接続される。
【0005】
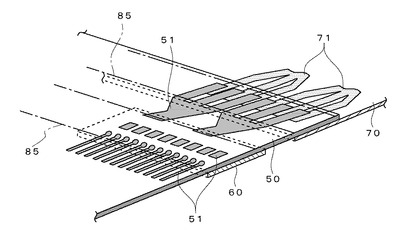
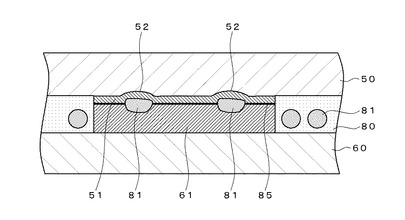
図11は、図10のA−A線に沿う断面を前面とした拡大斜視図により、上記のガラス基板50とIC60およびFPC70との接続状態を示したものである。また図12は、ガラス基板50とIC60との接続部位の断面をさらに拡大して表した模式図である。
【0006】
各図の51が基板電極であり、85が異方性導電膜である。また図12の81は、異方性導電膜内の導電性粒子である。また、図11の71はFPC70の電極パターンであり、図12の61はIC60のバンプ電極である。以下では、これらを、単に「電極71」「電極61」と記載する。
【0007】
図示のように、IC60やFPC70の電極61,71は、それぞれ異方性導電膜85を介してガラス基板50の対応する基板電極51に重なるように位置合わせされる。この位置合わせが完了した段階で熱圧着処理を行うことにより、IC60やFPC70はガラス基板50に接着され、対向関係にある電極は、これらの間に挟まれた導電性粒子81によって電気的に接続された状態となる。一方、隣り合う電極間は、異方性導電膜85の粘着層80によって絶縁された状態になる。
【0008】
導電性粒子81のうち、基板電極51と電極61,71との間に挟まれて圧迫されたものは、潰れて幅方向に広がる。また、この導電性粒子81が潰れる過程で、図12中の52に示すように、基板電極51に小さな隆起(以下、これを「圧痕」という。)が生じる。
【0009】
上記のようにして製作された液晶パネルについて、ガラス基板50を電極51の形成面とは反対側の面から照明しながら撮像し、生成された画像を用いて圧痕の数や形状を計測することにより、基板電極51とIC60,FPC70の各電極61,71との接続状態を判別する検査装置が知られている(たとえば特許文献1参照。)。
【0010】
つぎに、配線基板を光学的に検査する場合のオートフォーカス制御について、特許文献2には、被対象物(ウエハ)とカメラとの距離を変更しながら撮像を繰り返し行い、被対象物のコントラストが最大となる位置にカメラを合わせることが記載されている。また、特許文献3には、配線基板の検査装置において、レーザ変位計などの距離センサにより基板までの距離を計測するようにし、最初にカメラの画像に基づいて合焦点するように調整したときに距離センサにより計測された距離を基準に、以後の撮像の際に距離センサにより計測された距離と基準の距離との差に基づいてオートフォーカス制御を行うことが記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2003−269934号公報
【特許文献2】特開平5−21318号公報
【特許文献3】特開2007−121981号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
基板電極は鏡面反射性が高いので、この電極における圧痕の状態を判別するには、基板電極からの正反射光を撮像装置に入射させて、圧痕と周囲との輝度差が大きい画像が生成されるように撮像装置の焦点の位置を調整するのが良いと思われる。この場合に、特許文献2に記載されているように、実際の画像を確認しながら焦点位置の調整を行うと、撮像の繰り返しに伴って処理の時間が長くなる。このため、検査時間の短縮が要求される現場で上記の方法を実施するのは困難である。
【0013】
一方、光学式の変位センサを、撮像装置や照明部とともにワークに対して相対的に上下動するように配備し、変位センサによりワークまでの距離を計測すれば、変位センサの計測値のみで撮像装置の高さを調整することができ、処理を高速化することができる。しかし、液晶パネルのような透光性を有するワークを撮像対象とする場合には、ワークの表面からの反射光以外に、裏面からの多重反射光なども発生するため、変位センサの計測値のみからカメラの焦点の位置を割り出すのは困難である。
【0014】
上記の問題点に鑑み、発明者は、検査の前に、ワークの良品モデルを用いた撮像を行って、生成された画像をユーザが目視確認して、圧痕が明瞭に見える画像を確認できたときの変位センサの計測値を検査装置に教示することを検討した。しかし、画像中の圧痕は微小で、また明るさにばらつきがあるため、圧痕が最も明瞭になる時点を判断しにくく、ユーザに大きな負担がかかることが判明した。
【0015】
本発明は上記の問題に着目し、検査時の撮像装置の焦点調整に必要な情報を設定する作業を容易に行うことができるようにすることを、課題とする。
【課題を解決するための手段】
【0016】
本発明による検査では、表面に電極が形成された透光性を有する基板と、この基板の電極に異方性導電膜を介して電気接続することにより基板に一体に設けられた付属物(ICやFPCなど)とを具備するワークを対象に、基板の電極と付属物との接続状態を検査する。本発明では、このようなワークを付属物が接続された面とは反対の面から照明して、撮像を行うと、圧痕と基板との境界付近に撮像装置の焦点を合わせたときには圧痕が周囲より暗い画像が生成され、圧痕より下方に焦点を合わせたときには圧痕が周囲より明るい画像が生成され、これらの中間の位置に焦点を合わせると、圧痕と周囲との輝度が殆ど変わらない状態になることに着目して、以下のような検査方法を提案する。
【0017】
まず検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部を含む撮像ユニットを、ワークの付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、撮像ユニットのワークに対する相対位置を計測しながら両者の距離を調整し、計測値が基準の位置を示したときに距離の調整を終了して照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する。
【0018】
また、この方法では、前記検査のための準備の処理として、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。またこの画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルに対する撮像装置の相対位置を特定する。そして検査において、準備の処理で特定された相対位置を所定大きさの正または負のオフセット値により調整した位置を基準の位置として、撮像ユニットの高さを調整して撮像装置による撮像を実行する。
【0019】
圧痕が消失した画像が得られるのは、撮像装置の焦点が基板電極と圧痕との境界位置より下方の所定位置に合わせられているときであり、その位置から圧痕が明瞭な画像が得られるときの焦点の位置(基板と圧痕との境界位置、付属物側の電極の中間位置)までの距離は、各電極の厚みや導電性粒子の標準的な大きさに基づき推定することが可能である。よって、たとえば代表的なワークのサンプル、または設定処理に使用しているワークのモデルから上記の各距離を求めて、正および負のオフセット値を設定することができる。
【0020】
したがって、ユーザが圧痕が消失した画像が得られたと判断したときに特定された位置を上記のオフセット値により調整した位置を基準の位置として、撮像ユニットとワークとの距離を調整すれば、圧痕が明瞭になる画像を得られる位置に撮像装置の焦点を合わせることが可能である。
【0021】
また圧痕が消失する状態は、本発明が検査対象とするワークに共通に生じる現象であり、また圧痕が消失したという判断は、圧痕が明瞭になったという判断より容易に行うことができるから、条件に応じた画像を容易に特定することができ、画像を確認するユーザの負担を減らすことができる。
【0022】
本発明による第2の光学的検査方法では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの装置の光軸に沿って光を照射する照明部、ならびに撮像装置の視野に対応する領域に検出面をむけて配備される変位センサを含む撮像ユニットを、ワークの付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、変位センサの計測値が基準の距離を示すまでワークと撮像ユニットとの距離を調整した後に照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する。
【0023】
またこの第2の方法においては、検査のための準備の処理として、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。またこの画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときの変位センサの計測値を特定する。そして検査において、準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の距離として、撮像ユニットとワークとの距離を調整して撮像装置による撮像を実行する。
【0024】
上記の方法にれば、ユーザが圧痕が消失した画像が得られたと判断したときに変位センサが示した距離に上記のオフセット値を加算した値を基準の距離として、撮像ユニットの高さを調整することによって、圧痕が明瞭になる画像を得られる位置に撮像装置の焦点を合わせることができる。
【0025】
さらに本発明の第3の方法でも、第2の方法と同様の検査を実行するとともに、準備の処理において、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。また、この画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルと撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワークと撮像ユニットとの位置関係を毎回変更して、撮像装置による撮像と変位センサによる計測とを複数回実行し、電極部分の輝度の差または輝度のばらつきが最小となる画像を得たときの変位センサの計測値を特定する。また、検査では、準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の距離として、撮像ユニットの高さを調整して撮像装置による撮像を実行する。
【0026】
上記の方法によれば、ユーザの判断に若干の狂いがあっても、画像処理によって、圧痕が消失した画像を得たときの変位センサの計測値を特定することができる。よって、検査時の基準の高さを正しく求めて、撮像装置の焦点を、圧痕の検出に適した位置に設定することが可能になる。
【0027】
本発明による光学的検査装置は、表面に電極が形成された透光性を有する基板と、この基板の電極に異方性導電膜を介して電気接続されることにより基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、ワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて基板の電極と付属物との接続状態を検査する処理装置とを具備する。
【0028】
撮像ユニットには、受光面をワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部とが設けられる。処理装置には、表示部および操作部と、ワーク支持部により支持されたワークに対する撮像ユニットの相対位置を計測する計測手段と、計測手段による計測値が基準の位置を示すまでワーク支持部と撮像ユニットとの距離を調整した後に撮像装置に撮像を行わせ、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する検査実行手段と、ワークのモデルを用いて検査の際のワーク支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられる。
【0029】
情報導出手段は、操作部からの調整操作を受け付けてワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を操作部から受け付けたとき、そのときの計測手段による計測値を取得する手段とを具備する。また、登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される。
【0030】
上記の検査装置の計測手段には、たとえば、撮像ユニットまたはワーク支持部の上下動に応じてその高さ位置または高さの変化量を検出する検出部(ロータリーエンコーダ、リニアエンコーダ、ステッピングモータの位置制御機構が計測した位置座標など)と、この検出部からの出力を受け付けて、動作した機構の高さを示す数値を導出する手段とを含めることができる。
【0031】
好ましい態様による検査装置では、撮像ユニットに、撮像装置の視野に対応する領域に検出面をむけた変位センサが配備される。この場合の処理装置の計測手段は、変位センサからの出力信号を取り込んで、ワーク支持部に支持されていえるワークから撮像ユニットまでの距離を計測する。
【0032】
また撮像ユニットに変位センサを設ける場合には、処理装置の情報導出手段に、操作部からの高さを調整する操作を受け付けてワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を操作部から受け付けたとき、そのときのワーク支持部と撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワーク支持部と撮像ユニットとの位置関係を毎回変更して、撮像装置による撮像と変位センサによる計測とを複数回実行し、電極部分の輝度の差または輝度のばらつきが最小となる画像が得られたときの変位センサの計測値を取得する手段とを設けてもよい。この場合にも、登録手段には、情報導出手段が取得した計測値に所定大きさの正又は負のオフセット値を加算した値、または当該計測値とオフセット値との組み合わせが登録される。
【0033】
上記の各構成の検査装置では、ユーザがワークのモデルを用いた撮像で生成された画像を目視して、画像から圧痕が消失しているという判定入力を行うことにより、その画像が生成されたときのワークに対する撮像対象領域の距離が特定され、その特定結果から検査時のワーク支持部と撮像ユニットとの距離の調整に必要な情報が登録される。よって、検査では、圧痕の検査に適した位置に撮像装置の焦点を簡単かつ高速に合わせることが可能になる。
【発明の効果】
【0034】
上記の光学的検査方法および光学的検査装置によれば、モデルに対して実行された複数サイクルの撮像で生成された画像の中から圧痕が消失した状態の画像を抽出し、この抽出結果に基づいて検査の際のワークと撮像ユニットとの距離を設定するので、目視確認による設定を容易に行うことができ、ユーザにとっての利便性を向上することが可能になる。
【図面の簡単な説明】
【0035】
【図1】光学的検査装置の外観を示す斜視図である。
【図2】撮像ユニットの構成を示す斜視図である。
【図3】撮像ユニットの内部構成を示す模式図である。
【図4】光学的検査装置のブロック図である。
【図5】ワークの電極の構成を示す模式図である。
【図6】各照明部からの光の反射状態を電極毎に示した模式図である。
【図7】電極間の接続部位の断面、基板電極におけるコントラストと撮像装置の焦点位置との関係を示すグラフ、拡大図中のA,B,Cの各位置に焦点が合わせられたときに生成される画像を関連づけて示す図である。
【図8】ティーチング処理の手順を示すフローチャートである。
【図9】検査の手順を示すフローチャートである。
【図10】液晶パネルの全体構成を示す正面図である。
【図11】ガラス基板とICおよびFPCの接続状態を示す模式図である。
【図12】電極間の接続部位の断面を示す模式図である。
【発明を実施するための形態】
【0036】
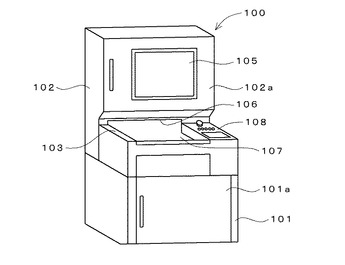
図1は、この発明が適用された光学的検査装置の外観の一例を示す。
この実施例の光学的検査装置100(以下、単に「検査装置100」という。)は、液晶パネルを対象に、その本体部を構成するガラス基板と、このガラス基板に一体に設けられた駆動用ICおよびFPCの接続状態の適否を検査するためのものである。
【0037】
図中、101は、後記する制御処理装置20などが収納された収納ボックスである。収納ボックス101の前面には扉部101aが設けられ、上面には、作業台103や撮像部102が設けられる。
撮像部102は、前面に扉102aを備えた筐体内に、後記する撮像ユニット1A,1Bなどを組み込んだ構成のものである。扉102aには表示部105が設けられ、さらにその下方に、検査対象の液晶パネル(以下、「ワーク」という。)の搬出入口106が設けられる。作業台103は、扉102aの下端縁より低くなるように設定され、その上面に、ワーク固定用のエア吸着機構(図示せず。)を具備するワーク支持部107が、撮像部102の内部に連なるように、後記するXYステージ部111上に支持された状態で配備される。またワーク支持部107の横手には、所定数の操作スイッチを含む操作部108が配備される。
【0038】
検査対象のワークは、先に図10〜12を用いて説明したものと同様の構成のものである。よって、以下の説明や図面でも、IC、FPC、およびこれらが接続されるガラス基板を、それぞれ符号60,70,50として記載する。また、各構成を区別せずに、ワーク全体を平板状にして、符号Wで表す場合もある。
【0039】
また、この実施例のIC60およびFPC50の電極61,71は、金で構成されている。よって、以下では、これらの電極61,71を「金電極」と呼ぶことで、ガラス基板50側の基板電極51と区別する。
【0040】
検査対象のワークWは、ガラス基板50の外側面(IC60およびFPC70が接続された面とは反対側の面)を上に向けた状態にして、搬出入口106より撮像部102内に挿入される。ワーク支持部107の露出部分は、この挿入作業の際のワークWの位置合わせ、ワークWをエア吸着によって支持面に固定する処理、検査が終了して搬出されたワークWを支持する目的で使用される。表示部105には、1つのワークWの検査が終了する都度、その検査の結果が表示される。
【0041】
ワーク支持部107の支持面にワークWが固定されると、ワーク支持部107は、XYステージ111によって撮像のための光学系が配備される撮像部102に引き込まれる。XYステージ111が幅方向(X軸方向)および奥行き方向(Y軸方向)の各方向に沿って移動することにより、ワークWはあらかじめ定めた場所に位置合わせされる。
【0042】
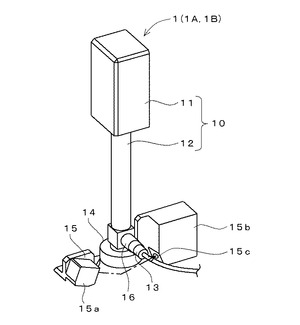
図2および図3は、撮像部102内に導入される撮像ユニット1A,1Bの構成を示す。各撮像ユニット1A,1Bは、撮像倍率が異なることを除けば、構成は同一であるので、以下、特に区別するときを除き、「撮像ユニット1」と記載する。
【0043】
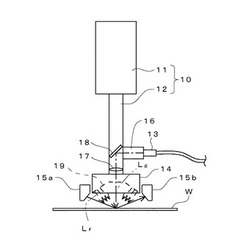
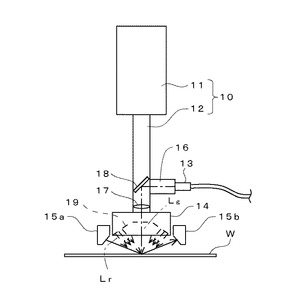
この撮像ユニット1は、カラー撮影用のCCDカメラ11(以下、単に「カメラ11」という。)およびレンズ鏡筒12から成る撮像装置10に、2つの照明部13,14、および変位センサ15を一体化した構成のものである。カメラ11の光軸およびレンズ鏡筒12は鉛直方向を向いており、レンズ鏡筒12の下部の横手に短筒状の光導入部16が連続形成されている。一方の照明部13は、この光導入部16の先端部に取り付けられ、他方の照明部14はレンズ鏡筒12の下端部に取り付けられている。
【0044】
レンズ鏡筒12の内部には、先端位置に対物レンズ17が、光導入部16への連通口に対向する場所にハーフミラー18が、それぞれ配備される。また、図示されていないが、光導入部16には、開口絞りが内蔵されている。
【0045】
光導入部16の先端に設けられた照明部13には、緑色光Lgを発するLED(図示せず。)が収容されている。この照明部13からの緑色光Lgは、光導入部16内の開口絞りによって、1mm径程度の光に絞られてハーフミラー18に到達し、さらに対物レンズ17に導かれる。この対物レンズ17を通った光がカメラ11の光軸に沿う光(同軸照明光)としてワークWに照射される。
【0046】
照明部14は、上部に円筒状の開口部(図示せず。)が形成された筐体内に赤色光Lrを発する複数のLED(図示せず。)が、開口部を取り囲むように同心円状に配備された構成のリング照明であって、開口部をレンズ鏡筒12の先端部に連結することにより固定支持されている。この照明部14内の各LEDから出射した赤色光Lrは、所定角度の広がりを持つ光となって、カメラ11の光軸に対して斜め方向に出射される(図3中の19は、赤色光Lrの出射面である。)。これにより、カメラ11の光軸を囲む全方位からワークWに対し、カメラ11の光軸に対して斜め方向に進行する赤色光Lrが照射される。
【0047】
変位センサ15は、レーザダイオードを光源とする正反射方式のセンサであって、照明部14の外周面に固定されている。図中、15aが変位センサ15の投光部であって、カメラ11の撮像対象領域の中心部にレーザ光を照射するように姿勢が調整されている。また15bが受光部であって、カメラ11の撮像対象領域から正反射するレーザ光を受光する位置に入光窓15cが位置するように、位置や姿勢が調整されている。このように正反射方式の変位センサ15を用いて、ワークWの上面のカメラ11の光軸に対応する箇所を対象とした計測を行うことにより、ワークWの内部や裏面から受光部15bに入射する光を少なくし、ワークWの表面から撮像ユニット1までの距離、言い換えればワークWに対する撮像ユニット1の高さを精度良く計測することができる。
【0048】
撮像部102に組み込まれる2つの撮像ユニット1のうち、一方の撮像ユニット1Aは比較的高倍率であり、IC60との接続箇所の検査に使用される。他方の撮像ユニット1Bは比較的低倍率であり、FPC70との接続箇所の検査に使用される。
【0049】
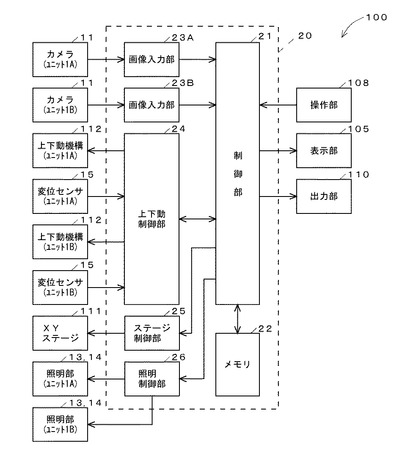
図4は、上記検査装置100のブロック図である。なお、この図中、(ユニット1A)と付した構成は、撮像ユニット1Aに含まれるものであり、(ユニット1B)と付した構成は、撮像ユニット1Bに含まれるものである。
【0050】
この実施例の検査装置100は、コンピュータによる制御部21を含む制御処理装置20を具備する。この制御処理装置20には、各撮像ユニット1A,1Bに対応するカメラ11、照明部13,14、変位センサ15,上下動機構112のほか、前出のXYステージ111、表示部105、操作部108、および検査結果を外部に出力するための出力部110などが接続される。
【0051】
制御処理装置20は、制御部21のほか、プログラムや設定データが格納されたメモリ22、各カメラ11に対応する画像入力部23A,23B、上下動制御部24、ステージ制御部25、照明制御部26などにより構成される。
【0052】
画像入力部23A,23Bは、それぞれ対応するカメラ11からの信号を受け付けてディジタル変換し、変換後の画像データを制御部21に入力する。
上下動制御部24には、各撮像ユニット1A,1Bの変位センサ15と上下動機構112とが接続される。上下動制御部24は、変位センサ15から入力された信号を制御部21に伝達する。制御部21では、伝達された信号を距離データに換算し、その距離と後記する基準の距離とのずれ量に基づき、上下動機構112の動作量を決定する。上下動制御部24が制御部21が決定した動作量に基づき上下動機構112を上昇または下降させることにより、カメラ11およびレンズ鏡筒12から成る撮像装置10の焦点が適切な位置に合わせられる。
【0053】
ステージ制御部25も、制御部21からX,Yの各軸毎の移動量を与えられ、これらの値に従ってXYステージ111の動作を制御する。
【0054】
照明制御部26は、各照明部13,14の点灯・消灯を制御する。具体的には、カメラ11とワークWとの位置合わせが完了する都度、撮像を行うカメラ11と同じ撮像ユニットに属する各照明部13,14を同時に点灯し、撮像が終了するまで、その点灯状態を維持する。
【0055】
上記構成の検査装置100が検査対象とするワークWについて説明する。このワークWには、ガラス基板50側の基板電極51とIC60やFPC70側の金電極61,71とが異方性導電膜85を介して接続されている部位が多数存在するほか、基板電極51と金電極61,71との位置合わせ状態を確認する目的で、双方のダミー電極を重なり合わないように配置した箇所が複数設定される。
【0056】
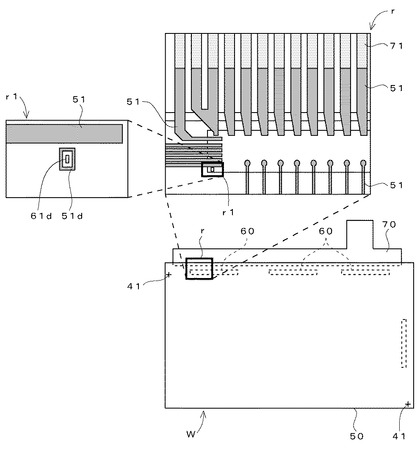
図5では、検査対象のワークWの構成を、全体図(紙面の右下の図)、その中の一部の領域rの拡大図、および領域rに含まれる領域r1の拡大図により示す。ワークWは、ガラス基板50の端縁部にFPC70および複数のIC60が接続された構成のものである。また、ガラス基板50の左上および右下の各角部には、ワークWの位置ずれ修正に用いられるフィデューシャルマーク41が設けられている。
【0057】
ワークWの全体図中の領域rは、IC60およびFPC70が接続されている箇所の一部に対応する。この領域rに関する右上の拡大図では、ガラス基板50側の基板電極51とFPC70側の金電極71とを、それぞれ異なるパターンを用いて示している。ここには図示していないが、FPC70の金電極71は、基板電極51の下方に対向する位置まで延びており、異方性導電膜85によって基板電極51に接続されている(図11を参照。)。またIC60の基板電極51に対向する箇所にも、金電極としてバンプ61が設けられ、これが異方性導電膜85によって基板電極51に接続される(図12を参照。)。
【0058】
領域r1は、ガラス基板50およびIC60の各ダミー電極51d,61dが位置合わせされている箇所に相当する。この例では、ガラス電極50側のダミー電極51dによるパターン内にIC60側のダミー電極61dが包含されるように各電極51d,61dが位置合わせされている。これらのダミー電極51d,61d間には異方性導電膜85は介在せず、電気的に遮断された状態になっている。
【0059】
この実施例では、基板電極51とIC60およびFPC70の各金電極61,71が電気接続されている箇所を対象にして、熱圧着処理によって基板電極51に生じた圧痕の状態を判別する検査(以下、「圧痕検査」という。)を実施する。さらに、上記の領域r1のようなダミー電極が配置されている箇所を対象にして、各ダミー電極によるパターンが位置ずれしていないかどうかを判別する検査(以下、「位置ずれ検査」という。)を実施する。
【0060】
また、これらの検査を開始するに先立ち、検査対象のワークWのモデルを撮像し、生成された画像を用いた「ティーチング処理」を実行する。ここでは、撮像対象領域や上記2種類の検査の対象となる検査領域の割り付けを行う。また撮像対象領域毎に、ユーザが撮像ユニット1の高さを調整しながら生成された画像を目視で確認し、その確認結果に基づいて検査の際の撮像ユニット1の基準の高さを導出するための情報を登録する。
【0061】
さらに、このティーチング処理では、各検査領域で被検査部位(圧痕52または各ダミー電極)を検出するのに用いられる2値化しきい値や判定のための基準値なども設定される。教示された内容を示す情報は、メモリ22に登録される。
【0062】
つぎに、この実施例における検査の原理について説明する。
この実施例では、撮像ユニット1内の2つの照明部13,14をともに点灯した状態にして撮像を行うが、各照明部13,14からの照明光は、各電極に対し、それぞれ異なる反射状態を示す。具体例を図6に示す。
【0063】
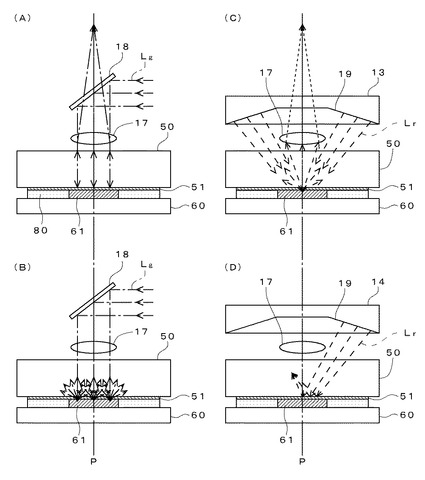
この図6は、IC60とガラス基板50との接続箇所を例に、各照明部13,14からの照明光の反射状態を、電極の種毎に示したものである。図中、左手の(A)(B)は、同軸照明用の照明部13からの緑色光Lgを対象とし、右手の(C)(D)は、斜め照明用の照明部14からの赤色光Lrを対象とする。いずれの照明についても、その照明により強い反射光をカメラ11に入射させることができるケースを上段に位置づけている。
【0064】
なお、この図6においては、ガラス基板50とIC60との間の構成のうち、基板電極50の圧痕52や異方性導電膜85の導電粒子81は微細であるため図示を省略する。また図中のPはカメラ11の光軸であり、80は,異方性導電膜による接着層である。
【0065】
照明部13からの緑色光Lgは、カメラ11の光軸Pに沿ってほぼ平行に進む光としてワークWに照射される。照射された緑色光Lgのうち、基板電極51の表面(ガラス基板50に対向する側の面である。)では、殆どの光が正反射して、照明光とは反対方向、すなわちカメラ11に向かう方向に沿って進む(図6の(A)参照。)。この結果、基板電極51からの反射光の大半がカメラ11に入射する。
【0066】
一方、IC60の金電極61に照射された緑色光Lgは拡散反射するので、カメラ11に入射する反射光の量は、基板電極51からの反射光に比べると、はるかに少なくなる(図6の(B)参照。)。
【0067】
照明部14からは、光軸Pに対して全方位から、この光軸Pに対して斜め方向に進む赤色光Lrが照射される。基板電極51の表面に照射された赤色光Lrは、殆どが正反射するので、赤色光Lrに対する反射光はカメラ11には入射しない(図6の(D)参照。)。一方、IC60の金電極61の表面に照射された赤色光Lrは種々の方向に拡散反射するので、カメラ11にも赤色光Lrに対する反射光が入射する(図6の(C)参照。)。
【0068】
このように、ガラス基板50の基板電極51では、第1の照明部13からの緑色光Lgに対する反射光がカメラ11に入射する有力な光となり、IC60やFPC70の金電極61,71については、第2の照明部14からの赤色光Lrに対する反射光がカメラ11に入射する有力な光となる。
【0069】
この実施例では、照明部13,14を同時に点灯して撮像を行うので、基板電極51と金電極61(または71)とが接続されている箇所では、図6の(A)〜(D)に示した4とおりの反射状態が一斉に生じる。しかし、金電極61,71で拡散反射してカメラ11に導かれる赤色光Lrよりも、基板電極51で正反射してカメラ11に導かれる緑色光Lgの方が圧倒的に大きいので、基板電極51と金電極61,71とが重ね合わせられている箇所では、赤色光Lrによる金電極61,71の像は殆ど現れず、基板電極51を緑色が強いパターンとして表すことができる。
【0070】
一方、ダミー電極の配置されている箇所では、位置合わせが良好であればガラス基板50側のダミー電極とIC60またはFPC70側のダミー電極とが重なり合うことはない。よって、IC60,FPC70側のダミー電極が赤色で表され、ガラス基板50側のダミー電極が青色で表された画像が生成される。
【0071】
上記の現象に鑑み、この実施例では、圧痕検査用の検査領域については、カラー画像を構成するr,g,bの画像データのうち、同軸照明光に対応するgの画像データを処理して、基板電極51および圧痕52を検出する。一方、位置ずれ検査用の検査領域では、gの画像データのほかrの画像データを用いて各ダミー電極を検出し、これらのダミー電極間の位置関係を判別するようにしている。
【0072】
圧痕検査では、gの画像データから輝度が所定のしきい値を上回る画素が分布する領域を抽出することによって、基板電極51を検出する。さらにこの基板電極51に対応する領域を別のしきい値により2値化することによって、基板電極51内の圧痕52を検出する。
【0073】
このように圧痕検査では、基板電極51内の圧痕52をその他の部位から切り分けて検出するため、画像中の基板電極51と圧痕52とを明確に区別できるように、撮像装置10の焦点を設定する必要がある。この課題に関し、発明者は、撮像ユニット1の高さを種々に変更して撮像を行ってみたところ、画像中の圧痕52の輝度に図7に示すような変化が生じることが判明した。
【0074】
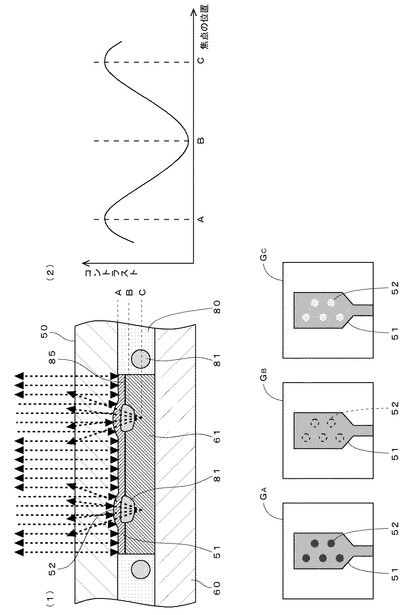
図7において、紙面の左上の模式図(1)では、図12と同様にガラス基板50とIC60との接続部位の断面を拡大して示し(導電粒子81および圧痕52を明示)、また照明部13からの同軸照明光の照射状態およびこの照明光の反射状態を、矢印付きの点線により表している。またこの模式図では、撮像装置10の焦点を合わせる代表的な位置を、A,B,Cで表している。
【0075】
紙面の右手のグラフ(2)は、基板電極51の画像におけるコントラストと撮像装置10の焦点位置との関係を示す。このグラフの横軸のA,B,Cは、左手の模式図にA,B,Cで示した各位置に対応する。
【0076】
さらに紙面の下方には、同軸照明光(緑色光Lg)に対応する基板電極51の画像GA,GB,GCを模式的に示す。これらの画像についても、対比の便宜のために、基板電極を51とし、圧痕を52として示す。なお、基板電極51より外側の領域(背景領域)は、実際には基板電極51より輝度が低い状態になる。
【0077】
上記の画像のうち、左の画像GAは、ガラス基板50と基板電極51との境界付近(図7(1)(2)のAに対応)に撮像装置10の焦点を合わせたときに生成されるものである。中央の画像GBは、撮像装置10の焦点を圧痕の付近(図7(1)(2)のBに対応)に合わせたときに生成されるものである。また右の画像GCは、圧痕52より下方の金電極61内の中間位置(図7(1)(2)のCに対応)に撮像装置10の焦点を合わせたときに生成されるものである。
【0078】
上記のグラフ(2)および画像の模式図に示すように、撮像装置10の焦点がガラス基板50と基板電極51との境界付近(Aの位置)に合わせられたときには、圧痕52が周囲よりも暗い画像が生成され、輝度が最も小さい状態になる。しかし、焦点が下方に移動するにつれて、圧痕52の輝度が高まり、Cの位置に焦点が合わせられたとき、圧痕52の輝度が最大になる。また、Aの位置とCの位置との間のいずれかの位置Bに焦点が合わせられたとき、圧痕52と周囲との輝度が殆ど変わらない状態、言い換えれば圧痕52が消失した状態になる。さらに、基板電極51の表面は鏡面であるため、撮像装置10の焦点の位置によらず、画像中の基板電極51の輝度はほぼ一定になる。よって、AおよびCの位置は最も輝度コントラストの高い位置となり、Bの位置は最も輝度コントラストの低い位置となる。
【0079】
撮像装置10の焦点がAの位置に設定された場合には、カメラ11に圧痕52の表面からの正反射光が入射する状態となるが、この正反射光は圧痕52の盛り上がりによって各方向に分散するので、カメラ11に入射する正反射光量は減少する。このため、画像GAのように、圧痕52の輝度が周囲より低い画像が生成されたものと考えられる。
【0080】
これに対し、撮像装置10の焦点が下方に移動するにつれて圧痕52の輝度が高められるのは、透明な基板電極51が圧痕52として盛り上がったことにより、その盛り上がりの表面が幾何光学的な凸面鏡として機能するためであると思われる。すなわち、ラインCが示す位置が幾何光学的な凸面鏡の焦点付近に対応しているために、その焦点付近に撮像装置10の焦点が合わせられたときに、圧痕52の輝度が最大になる状態が生じたと考えられる。
【0081】
上記の現象によれば、圧痕52を精度良く検出するには、上記のAまたはCの位置付近に撮像装置10の焦点を設定すべきである。しかし、実際の画像中の圧痕52は微小で、また盛り上がりの高さの差異などによって明るさにばらつきがあるため、画像を目視で確認するユーザは最適な状態の画像をなかなか判断できず、作業が長期化する可能性がある。
【0082】
そこでこの実施例のティーチング処理では、圧痕52が明瞭になる状態ではなく、圧痕52が消失したときの画像をユーザに指定させ、このときの撮像ユニット1の高さ(変位センサ15による計測値)を基準に、焦点調整のための基準データを導出するようにしている。さらにこの基準データも、画像のコントラストが最大になるときの高さではなく、コントラストが最小になるとき、すなわち圧痕52が殆ど検出できない状態になるときの高さに設定される。ただし、検査の際には、登録された基準データが示す高さに正または負のオフセット値を加算したものを基準の高さとして、撮像ユニット1を位置合わせする。
【0083】
上記のオフセット値について、この実施例の検査装置100のメモリ22には、あらかじめデフォルトの値が登録されている。このデフォルトのオフセット値は、何種類かのワークのサンプルの基板電極51の画像から求めたコントラストの特性データ(図2(2)にグラフで表したもの)から、それぞれA−B間の距離に相当する値と、B−C間の距離に相当する値を求め、これらを平均化するなどして導出されたものである。標準的なワークであれば、圧痕52が消失した画像を精度良く特定することができれば、この画像が生成された位置から上記のオフセット値分だけ上または下に撮像ユニット1を定めることによって、AまたはCにほぼ対応する位置に撮像装置10の焦点を合わせることができる。
【0084】
さらにこの実施例の検査装置100では、ティーチング処理において、適宜、基板電極51の画像におけるコントラストの変化を計測して、その変化特性に基づき、デフォルト以外のオフセット値を登録できるようにしている。これにより、特殊な構成のワークにも対応することが可能になる。
【0085】
上記のように、この実施例では、ユーザの目視確認に基づいて、撮像ユニット1の高さの基準データを設定するが、圧痕52が消えたか否かを判断するのは、圧痕52が明瞭になったか否かを判断するより容易であり、ユーザの負担を軽減することができる。またユーザが判断した高さをそのまま基準データとするのではなく、さらに画像処理によりコントラストが最小になるときの撮像ユニット1の高さを特定して、これを基準データとするので、ユーザの判断に多少のずれがあっても、基準データの精度を確保することができる。ただし、熟練したユーザが作業を行う場合には、圧痕が消失したと判断した画像が得られたときの変位センサ15による計測値を、そのまま基準データとして登録してもよい。
【0086】
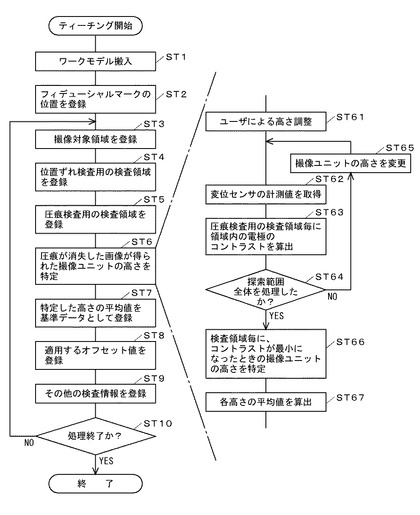
図8では、上記の検査装置100におけるティーチング処理の概略手順を左側に示すとともに、圧痕が消失した画像が得られるときの撮像ユニットの高さを特定する処理(ST6)の詳細な手順を、右側に示す。
【0087】
まず、左側の概略手順に沿って説明すると、この処理は、ワークWの良好な品質のモデル(以下「ワークモデル」という。)を使用するもので、まずワーク支持部107およびXYステージ111によってワークモデルを撮像部102内に搬入する(ST1)。つぎに、低倍率の撮像ユニット1Bによりワークモデルを撮像し、生成された画像を用いてフィデューシャルマーク41(図5を参照。)の位置を登録する(ST2)。
【0088】
以下、撮像および生成された画像の表示を行いながら、ユーザの操作に応じて、各種情報の設定および登録を行う(ST3〜10)。なお、このフローチャートには示していないが、ST3〜10のループは、まずIC60との接続部位を対象に実行され、続いてFPC70との接続部位を対象にした処理が実行される。またIC60との接続部位には高倍率の撮像ユニット1Aが使用され、FPC70との接続部位には低倍率の撮像ユニット1Bが使用される。
【0089】
以下、上記のループの処理内容を具体的に説明する。
まず、現在の撮像対象領域に撮像装置10の視野を合わせたときに生じたXYステージ111の移動量を、当該撮像対象領域の位置情報として登録する(ST3)。
【0090】
つぎに、表示中の画像中のダミー電極が配置されている範囲を指定する操作を受け付けて、指定された領域を位置ずれ検査用の領域として登録する(ST4)。さらにユーザは、画像中の基板電極51を1つずつ対象にして、検査対象範囲(金電極61または71が接続されている範囲)を指定するので、指定された各範囲を、それぞれ圧痕検査用の検査領域として登録する(ST5)。
なお、通常、1つの撮像対象領域には、位置ずれ検査用の検査領域が1つ設定され、圧痕検査用の検査領域が複数設定される。
【0091】
つぎに、ST6では、圧痕が消失した画像が生成されたときの撮像ユニット1の高さを特定する。この処理については、右側の詳細フローチャートに基づいて説明する。
【0092】
この処理では、まずユーザによる操作に応じて撮像ユニット1の高さを調整する(ST61)。ユーザは、表示された画像を確認して、圧痕52が見えない状態になったと判断するまで撮像ユニット1の高さを調整し、しかる後に確定操作を行う。この確定操作によって、「表示されている画像から圧痕が消失した」という判定が入力されたことになる。
【0093】
確定操作が行われると、そのときの撮像ユニット1の位置を起点に、上下の各方向にそれぞれ所定長さの探索範囲を設定して、その範囲内で所定量ずつ撮像ユニットの高さを変更する。そして、起点の位置を含む各高さについて、変位センサ15から高さの計測値を取得する処理と、生成された画像内の基板電極51の画像のコントラストを算出する処理を、探索範囲全体を処理し終えるまで実行する(ST62〜65)。
【0094】
なお、ST63では、圧痕検査用の検査領域毎に、処理対象の検査領域から輝度値が所定値以上になる画素を基板電極51に対応するものとして抽出し、その中の最大値と最小値との差を算出する。算出されたコントラストは、検査領域別および撮像ユニットの高さの別に分類されて、作業用メモリに一時保存される。
【0095】
探索範囲内の処理が終了すると、検査領域毎に、算出されたコントラストを比較して、コントラストが最小になったときの撮像ユニット1の高さを特定する(ST66)。さらに各検査領域につき特定した高さの平均値を算出する(ST67)。
【0096】
左のフローチャートに戻って、ST7では、上記ST61〜67の処理により算出された高さの平均値を、撮像ユニット1の高さ調整のための基準データとして登録する。
【0097】
ST8では、上記の基準データに加えるオフセット値を登録する。通常は、ここでは正または負のデフォルトのオフセット値の選択を受け付けて、その選択された結果を登録するが、先に述べたように、独自のオフセット値を導出してもよい。たとえば、前出のST62〜65の探索範囲より上または下の高さ範囲を対象に、同様のループを実行し、その処理結果からコントラストのピークが得られたときの撮像ユニット1の高さを特定する。そして特定した高さと基準データが示す高さとの差をオフセット値として登録する。
【0098】
さらにST9では、各検査領域で使用する2値化しきい値や判定基準値などを登録する。以下、すべての被検査部位に対する処理が終了するまで(ST10が「YES」)、撮像対象領域毎にST3〜9を実行する。
ただし、オフセット値については、ティーチング処理の前または後に、各撮像対象領域に対するオフセット値の選択を一括して行ってもよい。
【0099】
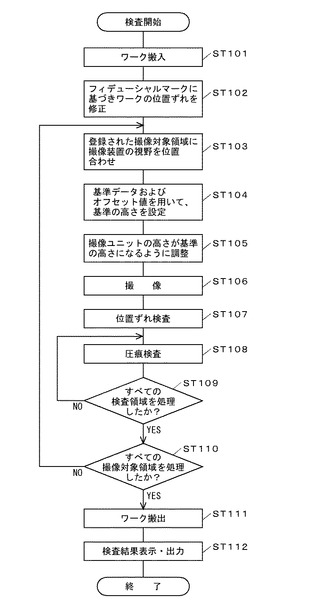
つぎに、図9は、上記のティーチング処理後に、実行される検査の手順(1つのワークWに対するもの)を示す。
このフローチャートに基づき説明すると、まずワークWをワーク支持部107にて受け付けて、撮像部102内に搬入して初期位置にセットし(ST101)、フィデューシャルマーク41に基づいてワークWの位置ずれを修正する処理を実行する(ST102)。簡単にこの処理を説明すると、搬入されたワークWの定められた範囲を撮像して、生成された画像からフィデューシャルマーク41を検出する。そして、ティーチング処理で登録された位置に対する検出位置の位置ずれ量を求め、位置ずれが解消するようにXYステージ111を移動させる。
【0100】
上記の処理によりワークWの位置ずれが修正されると、ティーチング処理で登録された撮像対象領域毎に、ST103〜110を実行する。なお、このループでも、まず撮像ユニット1Aを用いてIC60との接続部位に対する処理を実行し、その後、撮像ユニット1Bを用いてFPC70との接続部位に対する処理を実行する。
【0101】
ST103では、登録された撮像対象領域に撮像装置10の視野を位置合わせする。つぎにST104では、処理対象の撮像対象領域につき登録された高さの基準データにオフセット値を加算することにより基準の高さを設定する。ST105では、変位センサの計測値がこの基準の高さになるように撮像ユニット1の高さを調整する。
【0102】
上記ST103〜105により撮像ユニット1の位置および高さが定まると、カメラ11に撮像を行わせる(ST106)。そして生成された画像にティーチング時に登録された検査領域を設定し、位置ずれ検査および圧痕検査を実行する(ST107〜109)。
【0103】
ST107の位置ずれ検査では、ガラス基板50側のダミー電極を表す緑色パターンと、IC60またはFPC70側のダミー電極を表す赤色パターンとを、それぞれ個別に検出し、各パターンの代表点(たとえば重心)の座標を求め、これらの座標間の距離を電極間の位置ずれ量として算出する。さらに算出した位置ずれ量を判定用の基準値と照合することにより、位置ずれの有無を判定する。
【0104】
ST108の圧痕検査では、gの画像データのみを対象に2値化処理を行って、圧痕52に相当する輝度の画素を検出する。さらに検出された画素を、連結する関係にあるもの毎にグループ分けし、設定されたグループの中で面積が所定値以上となるものを望ましい状態の圧痕52として、その数を計数する。さらに、この計数値を判定用の基準値と比較することによって、良・不良を判定する。
【0105】
以下、同様に、登録された撮像対象領域に撮像装置10の視野を順に合わせて、その高さを調整し、登録された検査領域に対する検査を実行する。すべての検査が終了すると(ST110が「YES」)、ワークWを搬出入口106よりワーク支持部107に搬出する(ST111)。さらに、各判定結果を統合して、ワーク全体における良否を判定し、その結果を表示部108に表示するとともに、外部に出力する(ST112)。
この後も、検査対象のワークWがあれば、上記の手順が繰り返し実行される。
【0106】
上記の検査の手順によれば、ティーチング処理で登録された基準データと正または負のオフセット値とから導出した基準の高さに基づき、変位センサ15による計測値を用いて撮像ユニットの高さ調整を高速で行うことができる。また、この高さ調整により、基板電極51と圧痕52との境界位置付近または金電極61,71の中間位置に撮像装置10の焦点を合わせて、圧痕52が明瞭に現れた画像を生成することができるので、精度の良い圧痕検査を安定して行うことが可能になる。
【0107】
なお、上記の実施例では、圧痕が消失した画像を特定するために基板電極51の画像の輝度の最大値と最小値との差を求めたが、これに代えて、基板電極51の画像から輝度の平均値と最大値または最小値とを求め、平均値に対する最大値または最小値の偏差を求めてもよい。または、基板電極51の画像中の輝度の分散を用いて、圧痕が消失した画像を特定してもよい。
【0108】
また、ティーチング処理において、圧痕が消失した画像が得られたときの変位センサ15の計測値に正または負のオフセット値を加算したものを登録し、検査において登録された値をそのまま基準の高さとして使用してもよい。
【0109】
つぎに、上記実施例ではIC60やFPC70が実装された面(実装面)を下にして検査を実施しているが、インラインタイプの検査装置の場合は、実装面が上になった状態のワークWが流れてくるため、各撮像ユニット1をワークWの下方に配置する可能性がある。
【0110】
また上記実施例では、撮像ユニット1に一体に設けた変位センサ15によって、ワークWに対する撮像ユニット1の高さを計測したが、これに代えて、上下動機構112(図4参照)内にアブソリュート型のロータリエンコーダやリニアエンコーダなどを含めておき、エンコーダからの出力を制御部21に入力して、撮像ユニット1の高さを計測するようにしてもよい。または、上下動制御部24が上下動機構112に含まれるステッピングモータへのパルス信号から割り出した位置座標を利用してもよい。
【0111】
また上記実施例では説明していないが、圧痕検査と同じ検査領域において、基板電極51上の異物やキズの有無、電極51の欠けを検査することも考えられる。例えば、圧痕検査が終了した後に、輝度しきい値と面積しきい値による二値化処理を行うなどして、異物、キズ、欠けの有無を判定することが考えられる。
【符号の説明】
【0112】
100 検査装置
1(1A,1B) 撮像ユニット
10 撮像装置
11 カメラ
12 レンズ鏡筒
13 照明部
15 変位センサ
20 制御処理装置20
21 制御部
22 メモリ
105 表示部
107 ワーク支持部
108 操作部
【技術分野】
【0001】
この発明は、異方性導電膜(ACF(Anisotropic Conductive Film))を介して接続される電極を対象に、これらの電極間の接続状態を光学的に検査する方法および装置に関する。
【背景技術】
【0002】
異方性導電膜は、微小な導電性粒子を含む粘着層が塗布されたフィルム材であって、はんだ付けが困難な部位を接続するのに用いられる。たとえば、液晶モジュールの製作において、液晶パネルを構成するガラス基板に、駆動用の回路が組み込まれたICや、ICに信号を中継するためのフレキシブルプリント基板(Flexible printed circuit ;以下「FPC」と略す。)を接続する場合に、異方性導電膜が用いられる。
【0003】
液晶パネルは、ITO膜や、クロム、アルミニウムなどの金属による薄膜状の電極パターン(以下、「基板電極」という。)が形成された2枚のガラス基板を、液晶層や配向膜などを挟んで一体にした構成のもので、一方のガラス基板に、ICやFPCが接続される。
図10は、液晶パネルの全体像を、ICおよびFPCが接続された面とは反対側の面を正面にして表したものである。図中、50は、ICやFPCが接続されたガラス基板である。このガラス基板50は、図示しないもう一方のガラス基板より若干大きく、基板同士が重ね合わせられる範囲より外側(ガラス基板50の周縁部)に、複数のIC60が接続されている。また、このガラス基板50の端縁部の一辺に沿うようにして、FPC70が接続される。
【0004】
IC60には、「バンプ」と呼ばれる突起状の電極が形成され、FPC70にも、接続用の電極パターンが形成される。バンプやFPC70の電極パターンは、メッキなどにおける主要成分に金が使用された金属製の電極である。これらの電極は、いずれも異方性導電膜を介してガラス基板50側の基板電極に接続される。
【0005】
図11は、図10のA−A線に沿う断面を前面とした拡大斜視図により、上記のガラス基板50とIC60およびFPC70との接続状態を示したものである。また図12は、ガラス基板50とIC60との接続部位の断面をさらに拡大して表した模式図である。
【0006】
各図の51が基板電極であり、85が異方性導電膜である。また図12の81は、異方性導電膜内の導電性粒子である。また、図11の71はFPC70の電極パターンであり、図12の61はIC60のバンプ電極である。以下では、これらを、単に「電極71」「電極61」と記載する。
【0007】
図示のように、IC60やFPC70の電極61,71は、それぞれ異方性導電膜85を介してガラス基板50の対応する基板電極51に重なるように位置合わせされる。この位置合わせが完了した段階で熱圧着処理を行うことにより、IC60やFPC70はガラス基板50に接着され、対向関係にある電極は、これらの間に挟まれた導電性粒子81によって電気的に接続された状態となる。一方、隣り合う電極間は、異方性導電膜85の粘着層80によって絶縁された状態になる。
【0008】
導電性粒子81のうち、基板電極51と電極61,71との間に挟まれて圧迫されたものは、潰れて幅方向に広がる。また、この導電性粒子81が潰れる過程で、図12中の52に示すように、基板電極51に小さな隆起(以下、これを「圧痕」という。)が生じる。
【0009】
上記のようにして製作された液晶パネルについて、ガラス基板50を電極51の形成面とは反対側の面から照明しながら撮像し、生成された画像を用いて圧痕の数や形状を計測することにより、基板電極51とIC60,FPC70の各電極61,71との接続状態を判別する検査装置が知られている(たとえば特許文献1参照。)。
【0010】
つぎに、配線基板を光学的に検査する場合のオートフォーカス制御について、特許文献2には、被対象物(ウエハ)とカメラとの距離を変更しながら撮像を繰り返し行い、被対象物のコントラストが最大となる位置にカメラを合わせることが記載されている。また、特許文献3には、配線基板の検査装置において、レーザ変位計などの距離センサにより基板までの距離を計測するようにし、最初にカメラの画像に基づいて合焦点するように調整したときに距離センサにより計測された距離を基準に、以後の撮像の際に距離センサにより計測された距離と基準の距離との差に基づいてオートフォーカス制御を行うことが記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2003−269934号公報
【特許文献2】特開平5−21318号公報
【特許文献3】特開2007−121981号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
基板電極は鏡面反射性が高いので、この電極における圧痕の状態を判別するには、基板電極からの正反射光を撮像装置に入射させて、圧痕と周囲との輝度差が大きい画像が生成されるように撮像装置の焦点の位置を調整するのが良いと思われる。この場合に、特許文献2に記載されているように、実際の画像を確認しながら焦点位置の調整を行うと、撮像の繰り返しに伴って処理の時間が長くなる。このため、検査時間の短縮が要求される現場で上記の方法を実施するのは困難である。
【0013】
一方、光学式の変位センサを、撮像装置や照明部とともにワークに対して相対的に上下動するように配備し、変位センサによりワークまでの距離を計測すれば、変位センサの計測値のみで撮像装置の高さを調整することができ、処理を高速化することができる。しかし、液晶パネルのような透光性を有するワークを撮像対象とする場合には、ワークの表面からの反射光以外に、裏面からの多重反射光なども発生するため、変位センサの計測値のみからカメラの焦点の位置を割り出すのは困難である。
【0014】
上記の問題点に鑑み、発明者は、検査の前に、ワークの良品モデルを用いた撮像を行って、生成された画像をユーザが目視確認して、圧痕が明瞭に見える画像を確認できたときの変位センサの計測値を検査装置に教示することを検討した。しかし、画像中の圧痕は微小で、また明るさにばらつきがあるため、圧痕が最も明瞭になる時点を判断しにくく、ユーザに大きな負担がかかることが判明した。
【0015】
本発明は上記の問題に着目し、検査時の撮像装置の焦点調整に必要な情報を設定する作業を容易に行うことができるようにすることを、課題とする。
【課題を解決するための手段】
【0016】
本発明による検査では、表面に電極が形成された透光性を有する基板と、この基板の電極に異方性導電膜を介して電気接続することにより基板に一体に設けられた付属物(ICやFPCなど)とを具備するワークを対象に、基板の電極と付属物との接続状態を検査する。本発明では、このようなワークを付属物が接続された面とは反対の面から照明して、撮像を行うと、圧痕と基板との境界付近に撮像装置の焦点を合わせたときには圧痕が周囲より暗い画像が生成され、圧痕より下方に焦点を合わせたときには圧痕が周囲より明るい画像が生成され、これらの中間の位置に焦点を合わせると、圧痕と周囲との輝度が殆ど変わらない状態になることに着目して、以下のような検査方法を提案する。
【0017】
まず検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部を含む撮像ユニットを、ワークの付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、撮像ユニットのワークに対する相対位置を計測しながら両者の距離を調整し、計測値が基準の位置を示したときに距離の調整を終了して照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する。
【0018】
また、この方法では、前記検査のための準備の処理として、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。またこの画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルに対する撮像装置の相対位置を特定する。そして検査において、準備の処理で特定された相対位置を所定大きさの正または負のオフセット値により調整した位置を基準の位置として、撮像ユニットの高さを調整して撮像装置による撮像を実行する。
【0019】
圧痕が消失した画像が得られるのは、撮像装置の焦点が基板電極と圧痕との境界位置より下方の所定位置に合わせられているときであり、その位置から圧痕が明瞭な画像が得られるときの焦点の位置(基板と圧痕との境界位置、付属物側の電極の中間位置)までの距離は、各電極の厚みや導電性粒子の標準的な大きさに基づき推定することが可能である。よって、たとえば代表的なワークのサンプル、または設定処理に使用しているワークのモデルから上記の各距離を求めて、正および負のオフセット値を設定することができる。
【0020】
したがって、ユーザが圧痕が消失した画像が得られたと判断したときに特定された位置を上記のオフセット値により調整した位置を基準の位置として、撮像ユニットとワークとの距離を調整すれば、圧痕が明瞭になる画像を得られる位置に撮像装置の焦点を合わせることが可能である。
【0021】
また圧痕が消失する状態は、本発明が検査対象とするワークに共通に生じる現象であり、また圧痕が消失したという判断は、圧痕が明瞭になったという判断より容易に行うことができるから、条件に応じた画像を容易に特定することができ、画像を確認するユーザの負担を減らすことができる。
【0022】
本発明による第2の光学的検査方法では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの装置の光軸に沿って光を照射する照明部、ならびに撮像装置の視野に対応する領域に検出面をむけて配備される変位センサを含む撮像ユニットを、ワークの付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、変位センサの計測値が基準の距離を示すまでワークと撮像ユニットとの距離を調整した後に照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する。
【0023】
またこの第2の方法においては、検査のための準備の処理として、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。またこの画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときの変位センサの計測値を特定する。そして検査において、準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の距離として、撮像ユニットとワークとの距離を調整して撮像装置による撮像を実行する。
【0024】
上記の方法にれば、ユーザが圧痕が消失した画像が得られたと判断したときに変位センサが示した距離に上記のオフセット値を加算した値を基準の距離として、撮像ユニットの高さを調整することによって、圧痕が明瞭になる画像を得られる位置に撮像装置の焦点を合わせることができる。
【0025】
さらに本発明の第3の方法でも、第2の方法と同様の検査を実行するとともに、準備の処理において、ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、撮像装置によるモデルの撮像および生成された画像を表示する処理を実行する。また、この画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルと撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワークと撮像ユニットとの位置関係を毎回変更して、撮像装置による撮像と変位センサによる計測とを複数回実行し、電極部分の輝度の差または輝度のばらつきが最小となる画像を得たときの変位センサの計測値を特定する。また、検査では、準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を基準の距離として、撮像ユニットの高さを調整して撮像装置による撮像を実行する。
【0026】
上記の方法によれば、ユーザの判断に若干の狂いがあっても、画像処理によって、圧痕が消失した画像を得たときの変位センサの計測値を特定することができる。よって、検査時の基準の高さを正しく求めて、撮像装置の焦点を、圧痕の検出に適した位置に設定することが可能になる。
【0027】
本発明による光学的検査装置は、表面に電極が形成された透光性を有する基板と、この基板の電極に異方性導電膜を介して電気接続されることにより基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、ワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて基板の電極と付属物との接続状態を検査する処理装置とを具備する。
【0028】
撮像ユニットには、受光面をワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部とが設けられる。処理装置には、表示部および操作部と、ワーク支持部により支持されたワークに対する撮像ユニットの相対位置を計測する計測手段と、計測手段による計測値が基準の位置を示すまでワーク支持部と撮像ユニットとの距離を調整した後に撮像装置に撮像を行わせ、生成された画像を用いて基板の電極に生じた圧痕の状態を判別する検査実行手段と、ワークのモデルを用いて検査の際のワーク支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられる。
【0029】
情報導出手段は、操作部からの調整操作を受け付けてワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を操作部から受け付けたとき、そのときの計測手段による計測値を取得する手段とを具備する。また、登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される。
【0030】
上記の検査装置の計測手段には、たとえば、撮像ユニットまたはワーク支持部の上下動に応じてその高さ位置または高さの変化量を検出する検出部(ロータリーエンコーダ、リニアエンコーダ、ステッピングモータの位置制御機構が計測した位置座標など)と、この検出部からの出力を受け付けて、動作した機構の高さを示す数値を導出する手段とを含めることができる。
【0031】
好ましい態様による検査装置では、撮像ユニットに、撮像装置の視野に対応する領域に検出面をむけた変位センサが配備される。この場合の処理装置の計測手段は、変位センサからの出力信号を取り込んで、ワーク支持部に支持されていえるワークから撮像ユニットまでの距離を計測する。
【0032】
また撮像ユニットに変位センサを設ける場合には、処理装置の情報導出手段に、操作部からの高さを調整する操作を受け付けてワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を操作部から受け付けたとき、そのときのワーク支持部と撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワーク支持部と撮像ユニットとの位置関係を毎回変更して、撮像装置による撮像と変位センサによる計測とを複数回実行し、電極部分の輝度の差または輝度のばらつきが最小となる画像が得られたときの変位センサの計測値を取得する手段とを設けてもよい。この場合にも、登録手段には、情報導出手段が取得した計測値に所定大きさの正又は負のオフセット値を加算した値、または当該計測値とオフセット値との組み合わせが登録される。
【0033】
上記の各構成の検査装置では、ユーザがワークのモデルを用いた撮像で生成された画像を目視して、画像から圧痕が消失しているという判定入力を行うことにより、その画像が生成されたときのワークに対する撮像対象領域の距離が特定され、その特定結果から検査時のワーク支持部と撮像ユニットとの距離の調整に必要な情報が登録される。よって、検査では、圧痕の検査に適した位置に撮像装置の焦点を簡単かつ高速に合わせることが可能になる。
【発明の効果】
【0034】
上記の光学的検査方法および光学的検査装置によれば、モデルに対して実行された複数サイクルの撮像で生成された画像の中から圧痕が消失した状態の画像を抽出し、この抽出結果に基づいて検査の際のワークと撮像ユニットとの距離を設定するので、目視確認による設定を容易に行うことができ、ユーザにとっての利便性を向上することが可能になる。
【図面の簡単な説明】
【0035】
【図1】光学的検査装置の外観を示す斜視図である。
【図2】撮像ユニットの構成を示す斜視図である。
【図3】撮像ユニットの内部構成を示す模式図である。
【図4】光学的検査装置のブロック図である。
【図5】ワークの電極の構成を示す模式図である。
【図6】各照明部からの光の反射状態を電極毎に示した模式図である。
【図7】電極間の接続部位の断面、基板電極におけるコントラストと撮像装置の焦点位置との関係を示すグラフ、拡大図中のA,B,Cの各位置に焦点が合わせられたときに生成される画像を関連づけて示す図である。
【図8】ティーチング処理の手順を示すフローチャートである。
【図9】検査の手順を示すフローチャートである。
【図10】液晶パネルの全体構成を示す正面図である。
【図11】ガラス基板とICおよびFPCの接続状態を示す模式図である。
【図12】電極間の接続部位の断面を示す模式図である。
【発明を実施するための形態】
【0036】
図1は、この発明が適用された光学的検査装置の外観の一例を示す。
この実施例の光学的検査装置100(以下、単に「検査装置100」という。)は、液晶パネルを対象に、その本体部を構成するガラス基板と、このガラス基板に一体に設けられた駆動用ICおよびFPCの接続状態の適否を検査するためのものである。
【0037】
図中、101は、後記する制御処理装置20などが収納された収納ボックスである。収納ボックス101の前面には扉部101aが設けられ、上面には、作業台103や撮像部102が設けられる。
撮像部102は、前面に扉102aを備えた筐体内に、後記する撮像ユニット1A,1Bなどを組み込んだ構成のものである。扉102aには表示部105が設けられ、さらにその下方に、検査対象の液晶パネル(以下、「ワーク」という。)の搬出入口106が設けられる。作業台103は、扉102aの下端縁より低くなるように設定され、その上面に、ワーク固定用のエア吸着機構(図示せず。)を具備するワーク支持部107が、撮像部102の内部に連なるように、後記するXYステージ部111上に支持された状態で配備される。またワーク支持部107の横手には、所定数の操作スイッチを含む操作部108が配備される。
【0038】
検査対象のワークは、先に図10〜12を用いて説明したものと同様の構成のものである。よって、以下の説明や図面でも、IC、FPC、およびこれらが接続されるガラス基板を、それぞれ符号60,70,50として記載する。また、各構成を区別せずに、ワーク全体を平板状にして、符号Wで表す場合もある。
【0039】
また、この実施例のIC60およびFPC50の電極61,71は、金で構成されている。よって、以下では、これらの電極61,71を「金電極」と呼ぶことで、ガラス基板50側の基板電極51と区別する。
【0040】
検査対象のワークWは、ガラス基板50の外側面(IC60およびFPC70が接続された面とは反対側の面)を上に向けた状態にして、搬出入口106より撮像部102内に挿入される。ワーク支持部107の露出部分は、この挿入作業の際のワークWの位置合わせ、ワークWをエア吸着によって支持面に固定する処理、検査が終了して搬出されたワークWを支持する目的で使用される。表示部105には、1つのワークWの検査が終了する都度、その検査の結果が表示される。
【0041】
ワーク支持部107の支持面にワークWが固定されると、ワーク支持部107は、XYステージ111によって撮像のための光学系が配備される撮像部102に引き込まれる。XYステージ111が幅方向(X軸方向)および奥行き方向(Y軸方向)の各方向に沿って移動することにより、ワークWはあらかじめ定めた場所に位置合わせされる。
【0042】
図2および図3は、撮像部102内に導入される撮像ユニット1A,1Bの構成を示す。各撮像ユニット1A,1Bは、撮像倍率が異なることを除けば、構成は同一であるので、以下、特に区別するときを除き、「撮像ユニット1」と記載する。
【0043】
この撮像ユニット1は、カラー撮影用のCCDカメラ11(以下、単に「カメラ11」という。)およびレンズ鏡筒12から成る撮像装置10に、2つの照明部13,14、および変位センサ15を一体化した構成のものである。カメラ11の光軸およびレンズ鏡筒12は鉛直方向を向いており、レンズ鏡筒12の下部の横手に短筒状の光導入部16が連続形成されている。一方の照明部13は、この光導入部16の先端部に取り付けられ、他方の照明部14はレンズ鏡筒12の下端部に取り付けられている。
【0044】
レンズ鏡筒12の内部には、先端位置に対物レンズ17が、光導入部16への連通口に対向する場所にハーフミラー18が、それぞれ配備される。また、図示されていないが、光導入部16には、開口絞りが内蔵されている。
【0045】
光導入部16の先端に設けられた照明部13には、緑色光Lgを発するLED(図示せず。)が収容されている。この照明部13からの緑色光Lgは、光導入部16内の開口絞りによって、1mm径程度の光に絞られてハーフミラー18に到達し、さらに対物レンズ17に導かれる。この対物レンズ17を通った光がカメラ11の光軸に沿う光(同軸照明光)としてワークWに照射される。
【0046】
照明部14は、上部に円筒状の開口部(図示せず。)が形成された筐体内に赤色光Lrを発する複数のLED(図示せず。)が、開口部を取り囲むように同心円状に配備された構成のリング照明であって、開口部をレンズ鏡筒12の先端部に連結することにより固定支持されている。この照明部14内の各LEDから出射した赤色光Lrは、所定角度の広がりを持つ光となって、カメラ11の光軸に対して斜め方向に出射される(図3中の19は、赤色光Lrの出射面である。)。これにより、カメラ11の光軸を囲む全方位からワークWに対し、カメラ11の光軸に対して斜め方向に進行する赤色光Lrが照射される。
【0047】
変位センサ15は、レーザダイオードを光源とする正反射方式のセンサであって、照明部14の外周面に固定されている。図中、15aが変位センサ15の投光部であって、カメラ11の撮像対象領域の中心部にレーザ光を照射するように姿勢が調整されている。また15bが受光部であって、カメラ11の撮像対象領域から正反射するレーザ光を受光する位置に入光窓15cが位置するように、位置や姿勢が調整されている。このように正反射方式の変位センサ15を用いて、ワークWの上面のカメラ11の光軸に対応する箇所を対象とした計測を行うことにより、ワークWの内部や裏面から受光部15bに入射する光を少なくし、ワークWの表面から撮像ユニット1までの距離、言い換えればワークWに対する撮像ユニット1の高さを精度良く計測することができる。
【0048】
撮像部102に組み込まれる2つの撮像ユニット1のうち、一方の撮像ユニット1Aは比較的高倍率であり、IC60との接続箇所の検査に使用される。他方の撮像ユニット1Bは比較的低倍率であり、FPC70との接続箇所の検査に使用される。
【0049】
図4は、上記検査装置100のブロック図である。なお、この図中、(ユニット1A)と付した構成は、撮像ユニット1Aに含まれるものであり、(ユニット1B)と付した構成は、撮像ユニット1Bに含まれるものである。
【0050】
この実施例の検査装置100は、コンピュータによる制御部21を含む制御処理装置20を具備する。この制御処理装置20には、各撮像ユニット1A,1Bに対応するカメラ11、照明部13,14、変位センサ15,上下動機構112のほか、前出のXYステージ111、表示部105、操作部108、および検査結果を外部に出力するための出力部110などが接続される。
【0051】
制御処理装置20は、制御部21のほか、プログラムや設定データが格納されたメモリ22、各カメラ11に対応する画像入力部23A,23B、上下動制御部24、ステージ制御部25、照明制御部26などにより構成される。
【0052】
画像入力部23A,23Bは、それぞれ対応するカメラ11からの信号を受け付けてディジタル変換し、変換後の画像データを制御部21に入力する。
上下動制御部24には、各撮像ユニット1A,1Bの変位センサ15と上下動機構112とが接続される。上下動制御部24は、変位センサ15から入力された信号を制御部21に伝達する。制御部21では、伝達された信号を距離データに換算し、その距離と後記する基準の距離とのずれ量に基づき、上下動機構112の動作量を決定する。上下動制御部24が制御部21が決定した動作量に基づき上下動機構112を上昇または下降させることにより、カメラ11およびレンズ鏡筒12から成る撮像装置10の焦点が適切な位置に合わせられる。
【0053】
ステージ制御部25も、制御部21からX,Yの各軸毎の移動量を与えられ、これらの値に従ってXYステージ111の動作を制御する。
【0054】
照明制御部26は、各照明部13,14の点灯・消灯を制御する。具体的には、カメラ11とワークWとの位置合わせが完了する都度、撮像を行うカメラ11と同じ撮像ユニットに属する各照明部13,14を同時に点灯し、撮像が終了するまで、その点灯状態を維持する。
【0055】
上記構成の検査装置100が検査対象とするワークWについて説明する。このワークWには、ガラス基板50側の基板電極51とIC60やFPC70側の金電極61,71とが異方性導電膜85を介して接続されている部位が多数存在するほか、基板電極51と金電極61,71との位置合わせ状態を確認する目的で、双方のダミー電極を重なり合わないように配置した箇所が複数設定される。
【0056】
図5では、検査対象のワークWの構成を、全体図(紙面の右下の図)、その中の一部の領域rの拡大図、および領域rに含まれる領域r1の拡大図により示す。ワークWは、ガラス基板50の端縁部にFPC70および複数のIC60が接続された構成のものである。また、ガラス基板50の左上および右下の各角部には、ワークWの位置ずれ修正に用いられるフィデューシャルマーク41が設けられている。
【0057】
ワークWの全体図中の領域rは、IC60およびFPC70が接続されている箇所の一部に対応する。この領域rに関する右上の拡大図では、ガラス基板50側の基板電極51とFPC70側の金電極71とを、それぞれ異なるパターンを用いて示している。ここには図示していないが、FPC70の金電極71は、基板電極51の下方に対向する位置まで延びており、異方性導電膜85によって基板電極51に接続されている(図11を参照。)。またIC60の基板電極51に対向する箇所にも、金電極としてバンプ61が設けられ、これが異方性導電膜85によって基板電極51に接続される(図12を参照。)。
【0058】
領域r1は、ガラス基板50およびIC60の各ダミー電極51d,61dが位置合わせされている箇所に相当する。この例では、ガラス電極50側のダミー電極51dによるパターン内にIC60側のダミー電極61dが包含されるように各電極51d,61dが位置合わせされている。これらのダミー電極51d,61d間には異方性導電膜85は介在せず、電気的に遮断された状態になっている。
【0059】
この実施例では、基板電極51とIC60およびFPC70の各金電極61,71が電気接続されている箇所を対象にして、熱圧着処理によって基板電極51に生じた圧痕の状態を判別する検査(以下、「圧痕検査」という。)を実施する。さらに、上記の領域r1のようなダミー電極が配置されている箇所を対象にして、各ダミー電極によるパターンが位置ずれしていないかどうかを判別する検査(以下、「位置ずれ検査」という。)を実施する。
【0060】
また、これらの検査を開始するに先立ち、検査対象のワークWのモデルを撮像し、生成された画像を用いた「ティーチング処理」を実行する。ここでは、撮像対象領域や上記2種類の検査の対象となる検査領域の割り付けを行う。また撮像対象領域毎に、ユーザが撮像ユニット1の高さを調整しながら生成された画像を目視で確認し、その確認結果に基づいて検査の際の撮像ユニット1の基準の高さを導出するための情報を登録する。
【0061】
さらに、このティーチング処理では、各検査領域で被検査部位(圧痕52または各ダミー電極)を検出するのに用いられる2値化しきい値や判定のための基準値なども設定される。教示された内容を示す情報は、メモリ22に登録される。
【0062】
つぎに、この実施例における検査の原理について説明する。
この実施例では、撮像ユニット1内の2つの照明部13,14をともに点灯した状態にして撮像を行うが、各照明部13,14からの照明光は、各電極に対し、それぞれ異なる反射状態を示す。具体例を図6に示す。
【0063】
この図6は、IC60とガラス基板50との接続箇所を例に、各照明部13,14からの照明光の反射状態を、電極の種毎に示したものである。図中、左手の(A)(B)は、同軸照明用の照明部13からの緑色光Lgを対象とし、右手の(C)(D)は、斜め照明用の照明部14からの赤色光Lrを対象とする。いずれの照明についても、その照明により強い反射光をカメラ11に入射させることができるケースを上段に位置づけている。
【0064】
なお、この図6においては、ガラス基板50とIC60との間の構成のうち、基板電極50の圧痕52や異方性導電膜85の導電粒子81は微細であるため図示を省略する。また図中のPはカメラ11の光軸であり、80は,異方性導電膜による接着層である。
【0065】
照明部13からの緑色光Lgは、カメラ11の光軸Pに沿ってほぼ平行に進む光としてワークWに照射される。照射された緑色光Lgのうち、基板電極51の表面(ガラス基板50に対向する側の面である。)では、殆どの光が正反射して、照明光とは反対方向、すなわちカメラ11に向かう方向に沿って進む(図6の(A)参照。)。この結果、基板電極51からの反射光の大半がカメラ11に入射する。
【0066】
一方、IC60の金電極61に照射された緑色光Lgは拡散反射するので、カメラ11に入射する反射光の量は、基板電極51からの反射光に比べると、はるかに少なくなる(図6の(B)参照。)。
【0067】
照明部14からは、光軸Pに対して全方位から、この光軸Pに対して斜め方向に進む赤色光Lrが照射される。基板電極51の表面に照射された赤色光Lrは、殆どが正反射するので、赤色光Lrに対する反射光はカメラ11には入射しない(図6の(D)参照。)。一方、IC60の金電極61の表面に照射された赤色光Lrは種々の方向に拡散反射するので、カメラ11にも赤色光Lrに対する反射光が入射する(図6の(C)参照。)。
【0068】
このように、ガラス基板50の基板電極51では、第1の照明部13からの緑色光Lgに対する反射光がカメラ11に入射する有力な光となり、IC60やFPC70の金電極61,71については、第2の照明部14からの赤色光Lrに対する反射光がカメラ11に入射する有力な光となる。
【0069】
この実施例では、照明部13,14を同時に点灯して撮像を行うので、基板電極51と金電極61(または71)とが接続されている箇所では、図6の(A)〜(D)に示した4とおりの反射状態が一斉に生じる。しかし、金電極61,71で拡散反射してカメラ11に導かれる赤色光Lrよりも、基板電極51で正反射してカメラ11に導かれる緑色光Lgの方が圧倒的に大きいので、基板電極51と金電極61,71とが重ね合わせられている箇所では、赤色光Lrによる金電極61,71の像は殆ど現れず、基板電極51を緑色が強いパターンとして表すことができる。
【0070】
一方、ダミー電極の配置されている箇所では、位置合わせが良好であればガラス基板50側のダミー電極とIC60またはFPC70側のダミー電極とが重なり合うことはない。よって、IC60,FPC70側のダミー電極が赤色で表され、ガラス基板50側のダミー電極が青色で表された画像が生成される。
【0071】
上記の現象に鑑み、この実施例では、圧痕検査用の検査領域については、カラー画像を構成するr,g,bの画像データのうち、同軸照明光に対応するgの画像データを処理して、基板電極51および圧痕52を検出する。一方、位置ずれ検査用の検査領域では、gの画像データのほかrの画像データを用いて各ダミー電極を検出し、これらのダミー電極間の位置関係を判別するようにしている。
【0072】
圧痕検査では、gの画像データから輝度が所定のしきい値を上回る画素が分布する領域を抽出することによって、基板電極51を検出する。さらにこの基板電極51に対応する領域を別のしきい値により2値化することによって、基板電極51内の圧痕52を検出する。
【0073】
このように圧痕検査では、基板電極51内の圧痕52をその他の部位から切り分けて検出するため、画像中の基板電極51と圧痕52とを明確に区別できるように、撮像装置10の焦点を設定する必要がある。この課題に関し、発明者は、撮像ユニット1の高さを種々に変更して撮像を行ってみたところ、画像中の圧痕52の輝度に図7に示すような変化が生じることが判明した。
【0074】
図7において、紙面の左上の模式図(1)では、図12と同様にガラス基板50とIC60との接続部位の断面を拡大して示し(導電粒子81および圧痕52を明示)、また照明部13からの同軸照明光の照射状態およびこの照明光の反射状態を、矢印付きの点線により表している。またこの模式図では、撮像装置10の焦点を合わせる代表的な位置を、A,B,Cで表している。
【0075】
紙面の右手のグラフ(2)は、基板電極51の画像におけるコントラストと撮像装置10の焦点位置との関係を示す。このグラフの横軸のA,B,Cは、左手の模式図にA,B,Cで示した各位置に対応する。
【0076】
さらに紙面の下方には、同軸照明光(緑色光Lg)に対応する基板電極51の画像GA,GB,GCを模式的に示す。これらの画像についても、対比の便宜のために、基板電極を51とし、圧痕を52として示す。なお、基板電極51より外側の領域(背景領域)は、実際には基板電極51より輝度が低い状態になる。
【0077】
上記の画像のうち、左の画像GAは、ガラス基板50と基板電極51との境界付近(図7(1)(2)のAに対応)に撮像装置10の焦点を合わせたときに生成されるものである。中央の画像GBは、撮像装置10の焦点を圧痕の付近(図7(1)(2)のBに対応)に合わせたときに生成されるものである。また右の画像GCは、圧痕52より下方の金電極61内の中間位置(図7(1)(2)のCに対応)に撮像装置10の焦点を合わせたときに生成されるものである。
【0078】
上記のグラフ(2)および画像の模式図に示すように、撮像装置10の焦点がガラス基板50と基板電極51との境界付近(Aの位置)に合わせられたときには、圧痕52が周囲よりも暗い画像が生成され、輝度が最も小さい状態になる。しかし、焦点が下方に移動するにつれて、圧痕52の輝度が高まり、Cの位置に焦点が合わせられたとき、圧痕52の輝度が最大になる。また、Aの位置とCの位置との間のいずれかの位置Bに焦点が合わせられたとき、圧痕52と周囲との輝度が殆ど変わらない状態、言い換えれば圧痕52が消失した状態になる。さらに、基板電極51の表面は鏡面であるため、撮像装置10の焦点の位置によらず、画像中の基板電極51の輝度はほぼ一定になる。よって、AおよびCの位置は最も輝度コントラストの高い位置となり、Bの位置は最も輝度コントラストの低い位置となる。
【0079】
撮像装置10の焦点がAの位置に設定された場合には、カメラ11に圧痕52の表面からの正反射光が入射する状態となるが、この正反射光は圧痕52の盛り上がりによって各方向に分散するので、カメラ11に入射する正反射光量は減少する。このため、画像GAのように、圧痕52の輝度が周囲より低い画像が生成されたものと考えられる。
【0080】
これに対し、撮像装置10の焦点が下方に移動するにつれて圧痕52の輝度が高められるのは、透明な基板電極51が圧痕52として盛り上がったことにより、その盛り上がりの表面が幾何光学的な凸面鏡として機能するためであると思われる。すなわち、ラインCが示す位置が幾何光学的な凸面鏡の焦点付近に対応しているために、その焦点付近に撮像装置10の焦点が合わせられたときに、圧痕52の輝度が最大になる状態が生じたと考えられる。
【0081】
上記の現象によれば、圧痕52を精度良く検出するには、上記のAまたはCの位置付近に撮像装置10の焦点を設定すべきである。しかし、実際の画像中の圧痕52は微小で、また盛り上がりの高さの差異などによって明るさにばらつきがあるため、画像を目視で確認するユーザは最適な状態の画像をなかなか判断できず、作業が長期化する可能性がある。
【0082】
そこでこの実施例のティーチング処理では、圧痕52が明瞭になる状態ではなく、圧痕52が消失したときの画像をユーザに指定させ、このときの撮像ユニット1の高さ(変位センサ15による計測値)を基準に、焦点調整のための基準データを導出するようにしている。さらにこの基準データも、画像のコントラストが最大になるときの高さではなく、コントラストが最小になるとき、すなわち圧痕52が殆ど検出できない状態になるときの高さに設定される。ただし、検査の際には、登録された基準データが示す高さに正または負のオフセット値を加算したものを基準の高さとして、撮像ユニット1を位置合わせする。
【0083】
上記のオフセット値について、この実施例の検査装置100のメモリ22には、あらかじめデフォルトの値が登録されている。このデフォルトのオフセット値は、何種類かのワークのサンプルの基板電極51の画像から求めたコントラストの特性データ(図2(2)にグラフで表したもの)から、それぞれA−B間の距離に相当する値と、B−C間の距離に相当する値を求め、これらを平均化するなどして導出されたものである。標準的なワークであれば、圧痕52が消失した画像を精度良く特定することができれば、この画像が生成された位置から上記のオフセット値分だけ上または下に撮像ユニット1を定めることによって、AまたはCにほぼ対応する位置に撮像装置10の焦点を合わせることができる。
【0084】
さらにこの実施例の検査装置100では、ティーチング処理において、適宜、基板電極51の画像におけるコントラストの変化を計測して、その変化特性に基づき、デフォルト以外のオフセット値を登録できるようにしている。これにより、特殊な構成のワークにも対応することが可能になる。
【0085】
上記のように、この実施例では、ユーザの目視確認に基づいて、撮像ユニット1の高さの基準データを設定するが、圧痕52が消えたか否かを判断するのは、圧痕52が明瞭になったか否かを判断するより容易であり、ユーザの負担を軽減することができる。またユーザが判断した高さをそのまま基準データとするのではなく、さらに画像処理によりコントラストが最小になるときの撮像ユニット1の高さを特定して、これを基準データとするので、ユーザの判断に多少のずれがあっても、基準データの精度を確保することができる。ただし、熟練したユーザが作業を行う場合には、圧痕が消失したと判断した画像が得られたときの変位センサ15による計測値を、そのまま基準データとして登録してもよい。
【0086】
図8では、上記の検査装置100におけるティーチング処理の概略手順を左側に示すとともに、圧痕が消失した画像が得られるときの撮像ユニットの高さを特定する処理(ST6)の詳細な手順を、右側に示す。
【0087】
まず、左側の概略手順に沿って説明すると、この処理は、ワークWの良好な品質のモデル(以下「ワークモデル」という。)を使用するもので、まずワーク支持部107およびXYステージ111によってワークモデルを撮像部102内に搬入する(ST1)。つぎに、低倍率の撮像ユニット1Bによりワークモデルを撮像し、生成された画像を用いてフィデューシャルマーク41(図5を参照。)の位置を登録する(ST2)。
【0088】
以下、撮像および生成された画像の表示を行いながら、ユーザの操作に応じて、各種情報の設定および登録を行う(ST3〜10)。なお、このフローチャートには示していないが、ST3〜10のループは、まずIC60との接続部位を対象に実行され、続いてFPC70との接続部位を対象にした処理が実行される。またIC60との接続部位には高倍率の撮像ユニット1Aが使用され、FPC70との接続部位には低倍率の撮像ユニット1Bが使用される。
【0089】
以下、上記のループの処理内容を具体的に説明する。
まず、現在の撮像対象領域に撮像装置10の視野を合わせたときに生じたXYステージ111の移動量を、当該撮像対象領域の位置情報として登録する(ST3)。
【0090】
つぎに、表示中の画像中のダミー電極が配置されている範囲を指定する操作を受け付けて、指定された領域を位置ずれ検査用の領域として登録する(ST4)。さらにユーザは、画像中の基板電極51を1つずつ対象にして、検査対象範囲(金電極61または71が接続されている範囲)を指定するので、指定された各範囲を、それぞれ圧痕検査用の検査領域として登録する(ST5)。
なお、通常、1つの撮像対象領域には、位置ずれ検査用の検査領域が1つ設定され、圧痕検査用の検査領域が複数設定される。
【0091】
つぎに、ST6では、圧痕が消失した画像が生成されたときの撮像ユニット1の高さを特定する。この処理については、右側の詳細フローチャートに基づいて説明する。
【0092】
この処理では、まずユーザによる操作に応じて撮像ユニット1の高さを調整する(ST61)。ユーザは、表示された画像を確認して、圧痕52が見えない状態になったと判断するまで撮像ユニット1の高さを調整し、しかる後に確定操作を行う。この確定操作によって、「表示されている画像から圧痕が消失した」という判定が入力されたことになる。
【0093】
確定操作が行われると、そのときの撮像ユニット1の位置を起点に、上下の各方向にそれぞれ所定長さの探索範囲を設定して、その範囲内で所定量ずつ撮像ユニットの高さを変更する。そして、起点の位置を含む各高さについて、変位センサ15から高さの計測値を取得する処理と、生成された画像内の基板電極51の画像のコントラストを算出する処理を、探索範囲全体を処理し終えるまで実行する(ST62〜65)。
【0094】
なお、ST63では、圧痕検査用の検査領域毎に、処理対象の検査領域から輝度値が所定値以上になる画素を基板電極51に対応するものとして抽出し、その中の最大値と最小値との差を算出する。算出されたコントラストは、検査領域別および撮像ユニットの高さの別に分類されて、作業用メモリに一時保存される。
【0095】
探索範囲内の処理が終了すると、検査領域毎に、算出されたコントラストを比較して、コントラストが最小になったときの撮像ユニット1の高さを特定する(ST66)。さらに各検査領域につき特定した高さの平均値を算出する(ST67)。
【0096】
左のフローチャートに戻って、ST7では、上記ST61〜67の処理により算出された高さの平均値を、撮像ユニット1の高さ調整のための基準データとして登録する。
【0097】
ST8では、上記の基準データに加えるオフセット値を登録する。通常は、ここでは正または負のデフォルトのオフセット値の選択を受け付けて、その選択された結果を登録するが、先に述べたように、独自のオフセット値を導出してもよい。たとえば、前出のST62〜65の探索範囲より上または下の高さ範囲を対象に、同様のループを実行し、その処理結果からコントラストのピークが得られたときの撮像ユニット1の高さを特定する。そして特定した高さと基準データが示す高さとの差をオフセット値として登録する。
【0098】
さらにST9では、各検査領域で使用する2値化しきい値や判定基準値などを登録する。以下、すべての被検査部位に対する処理が終了するまで(ST10が「YES」)、撮像対象領域毎にST3〜9を実行する。
ただし、オフセット値については、ティーチング処理の前または後に、各撮像対象領域に対するオフセット値の選択を一括して行ってもよい。
【0099】
つぎに、図9は、上記のティーチング処理後に、実行される検査の手順(1つのワークWに対するもの)を示す。
このフローチャートに基づき説明すると、まずワークWをワーク支持部107にて受け付けて、撮像部102内に搬入して初期位置にセットし(ST101)、フィデューシャルマーク41に基づいてワークWの位置ずれを修正する処理を実行する(ST102)。簡単にこの処理を説明すると、搬入されたワークWの定められた範囲を撮像して、生成された画像からフィデューシャルマーク41を検出する。そして、ティーチング処理で登録された位置に対する検出位置の位置ずれ量を求め、位置ずれが解消するようにXYステージ111を移動させる。
【0100】
上記の処理によりワークWの位置ずれが修正されると、ティーチング処理で登録された撮像対象領域毎に、ST103〜110を実行する。なお、このループでも、まず撮像ユニット1Aを用いてIC60との接続部位に対する処理を実行し、その後、撮像ユニット1Bを用いてFPC70との接続部位に対する処理を実行する。
【0101】
ST103では、登録された撮像対象領域に撮像装置10の視野を位置合わせする。つぎにST104では、処理対象の撮像対象領域につき登録された高さの基準データにオフセット値を加算することにより基準の高さを設定する。ST105では、変位センサの計測値がこの基準の高さになるように撮像ユニット1の高さを調整する。
【0102】
上記ST103〜105により撮像ユニット1の位置および高さが定まると、カメラ11に撮像を行わせる(ST106)。そして生成された画像にティーチング時に登録された検査領域を設定し、位置ずれ検査および圧痕検査を実行する(ST107〜109)。
【0103】
ST107の位置ずれ検査では、ガラス基板50側のダミー電極を表す緑色パターンと、IC60またはFPC70側のダミー電極を表す赤色パターンとを、それぞれ個別に検出し、各パターンの代表点(たとえば重心)の座標を求め、これらの座標間の距離を電極間の位置ずれ量として算出する。さらに算出した位置ずれ量を判定用の基準値と照合することにより、位置ずれの有無を判定する。
【0104】
ST108の圧痕検査では、gの画像データのみを対象に2値化処理を行って、圧痕52に相当する輝度の画素を検出する。さらに検出された画素を、連結する関係にあるもの毎にグループ分けし、設定されたグループの中で面積が所定値以上となるものを望ましい状態の圧痕52として、その数を計数する。さらに、この計数値を判定用の基準値と比較することによって、良・不良を判定する。
【0105】
以下、同様に、登録された撮像対象領域に撮像装置10の視野を順に合わせて、その高さを調整し、登録された検査領域に対する検査を実行する。すべての検査が終了すると(ST110が「YES」)、ワークWを搬出入口106よりワーク支持部107に搬出する(ST111)。さらに、各判定結果を統合して、ワーク全体における良否を判定し、その結果を表示部108に表示するとともに、外部に出力する(ST112)。
この後も、検査対象のワークWがあれば、上記の手順が繰り返し実行される。
【0106】
上記の検査の手順によれば、ティーチング処理で登録された基準データと正または負のオフセット値とから導出した基準の高さに基づき、変位センサ15による計測値を用いて撮像ユニットの高さ調整を高速で行うことができる。また、この高さ調整により、基板電極51と圧痕52との境界位置付近または金電極61,71の中間位置に撮像装置10の焦点を合わせて、圧痕52が明瞭に現れた画像を生成することができるので、精度の良い圧痕検査を安定して行うことが可能になる。
【0107】
なお、上記の実施例では、圧痕が消失した画像を特定するために基板電極51の画像の輝度の最大値と最小値との差を求めたが、これに代えて、基板電極51の画像から輝度の平均値と最大値または最小値とを求め、平均値に対する最大値または最小値の偏差を求めてもよい。または、基板電極51の画像中の輝度の分散を用いて、圧痕が消失した画像を特定してもよい。
【0108】
また、ティーチング処理において、圧痕が消失した画像が得られたときの変位センサ15の計測値に正または負のオフセット値を加算したものを登録し、検査において登録された値をそのまま基準の高さとして使用してもよい。
【0109】
つぎに、上記実施例ではIC60やFPC70が実装された面(実装面)を下にして検査を実施しているが、インラインタイプの検査装置の場合は、実装面が上になった状態のワークWが流れてくるため、各撮像ユニット1をワークWの下方に配置する可能性がある。
【0110】
また上記実施例では、撮像ユニット1に一体に設けた変位センサ15によって、ワークWに対する撮像ユニット1の高さを計測したが、これに代えて、上下動機構112(図4参照)内にアブソリュート型のロータリエンコーダやリニアエンコーダなどを含めておき、エンコーダからの出力を制御部21に入力して、撮像ユニット1の高さを計測するようにしてもよい。または、上下動制御部24が上下動機構112に含まれるステッピングモータへのパルス信号から割り出した位置座標を利用してもよい。
【0111】
また上記実施例では説明していないが、圧痕検査と同じ検査領域において、基板電極51上の異物やキズの有無、電極51の欠けを検査することも考えられる。例えば、圧痕検査が終了した後に、輝度しきい値と面積しきい値による二値化処理を行うなどして、異物、キズ、欠けの有無を判定することが考えられる。
【符号の説明】
【0112】
100 検査装置
1(1A,1B) 撮像ユニット
10 撮像装置
11 カメラ
12 レンズ鏡筒
13 照明部
15 変位センサ
20 制御処理装置20
21 制御部
22 メモリ
105 表示部
107 ワーク支持部
108 操作部
【特許請求の範囲】
【請求項1】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部を含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、撮像ユニットのワークに対する相対位置を計測しながら両者の距離を調整し、前記計測値が基準の位置を示したときに前記距離の調整を終了して前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットと前記モデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルに対する撮像装置の相対位置を特定し、
前記検査において、前記準備の処理で特定された相対位置を所定大きさの正または負のオフセット値により調整した位置を基準の位置として、前記撮像ユニットとワークとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項2】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部、ならびに前記撮像装置の視野に対応する領域に検出面を向けて配備される変位センサを含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、前記変位センサの計測値が基準の距離を示すまで前記ワークと撮像ユニットとの距離を調整した後に前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットと前記モデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときの変位センサの計測値を特定し、
前記検査において、前記準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を前記基準の距離として、前記撮像ユニットとワークとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項3】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部、ならびに前記撮像装置の視野に対応する領域に検出面を向けて配備される変位センサを含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、前記変位センサの計測値が基準の距離を示すように前記ワークと撮像ユニットとの距離を調整した後に前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルと撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内で前記ワークと撮像ユニットとの位置関係を毎回変更して、前記撮像装置による撮像と前記変位センサによる計測とを複数回実行し、前記電極部分の輝度の差または輝度のばらつきが最小となる画像を得たときの前記変位センサの計測値を特定し、
前記検査において、前記準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を前記基準の距離として、前記撮像ユニットとモデルとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項4】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、このワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて前記基板の電極と付属物との接続状態を検査する処理装置とを具備し、
前記撮像ユニットには、受光面を前記ワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部とが設けられており、
前記処理装置には、表示部および操作部と、前記ワーク支持部により支持されたワークに対する撮像ユニットの相対位置を計測する計測手段と、前記計測手段による計測値が基準の位置を示すまで前記ワーク支持部と撮像ユニットとの距離を調整した後に前記撮像装置に撮像を行わせ、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別する検査実行手段と、前記ワークのモデルを用いて前記検査の際のワーク支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、前記検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられており、
前記情報導出手段は、前記操作部からの調整操作を受け付けて前記ワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を前記操作部から受け付けたとき、そのときの計測手段による計測値を取得する手段とを具備し、
前記登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される、光学的検査装置。
【請求項5】
前記撮像ユニットには、前記撮像装置の視野に対応する領域に検出面を向けた変位センサが、さらに配備されており、
前記処理装置の計測手段は、前記変位センサからの出力信号を取り込んで、ワーク支持部に支持されているワークから撮像ユニットまでの距離を計測する手段である、請求項4に記載された光学的検査装置。
【請求項6】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、このワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて前記基板の電極と付属物との接続状態を検査する処理装置とを具備し、
前記撮像ユニットには、受光面を前記ワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部と、前記撮像装置の視野に対応する領域に検出面を向けた変位センサとが設けられており、
前記処理装置には、表示部および操作部と、前記変位センサからの出力信号を取り込んで、ワーク支持部に支持されているワークから撮像ユニットまでの距離を計測する計測手段と、この計測手段による計測値が基準の距離を示すまで前記ワークと撮像ユニットとの距離を調整した後に前記撮像装置に撮像を行わせ、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別する検査実行手段と、前記ワークのモデルを用いて前記検査の際の撮像支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、前記検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられており、
前記情報導出手段は、前記操作部からの調整操作を受け付けて前記ワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を前記操作部から受け付けたとき、そのときのワーク支持部と撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワーク支持部と撮像ユニットとの位置関係を毎回変更して、前記撮像装置による撮像と前記変位センサによる計測とを複数回実行し、前記電極部分の輝度の差または輝度のばらつきが最小となる画像が得られたときの前記計測手段による計測値を取得する手段とを具備し、
前記登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される、光学的検査装置。
【請求項1】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部を含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、撮像ユニットのワークに対する相対位置を計測しながら両者の距離を調整し、前記計測値が基準の位置を示したときに前記距離の調整を終了して前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットと前記モデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルに対する撮像装置の相対位置を特定し、
前記検査において、前記準備の処理で特定された相対位置を所定大きさの正または負のオフセット値により調整した位置を基準の位置として、前記撮像ユニットとワークとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項2】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部、ならびに前記撮像装置の視野に対応する領域に検出面を向けて配備される変位センサを含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、前記変位センサの計測値が基準の距離を示すまで前記ワークと撮像ユニットとの距離を調整した後に前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットと前記モデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときの変位センサの計測値を特定し、
前記検査において、前記準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を前記基準の距離として、前記撮像ユニットとワークとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項3】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体に設けられた付属物とを具備するワークを対象に、前記基板の電極と付属物との接続状態を検査する方法であって、
前記検査では、検査対象のワークを水平な姿勢で支持し、撮像装置およびこの撮像装置の光軸に沿って光を照射する照明部、ならびに前記撮像装置の視野に対応する領域に検出面を向けて配備される変位センサを含む撮像ユニットを、前記ワークの前記付属物が接続された面とは反対の面に撮像装置の受光面を対向させて、ワークに対して相対的に上下動可能に配備し、前記変位センサの計測値が基準の距離を示すように前記ワークと撮像ユニットとの距離を調整した後に前記照明部からの光に対するワークからの正反射光を撮像装置により撮像し、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別し、
前記検査のための準備の処理として、
前記ワークのモデルを対象に、ユーザによる調整操作に応じて撮像ユニットとモデルとの距離を調整するとともに、前記撮像装置によるモデルの撮像および生成された画像を表示する処理を実行し、
前記画像の表示に対し、表示された画像から圧痕が消えたという判定入力を受け付けたとき、そのときのモデルと撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内で前記ワークと撮像ユニットとの位置関係を毎回変更して、前記撮像装置による撮像と前記変位センサによる計測とを複数回実行し、前記電極部分の輝度の差または輝度のばらつきが最小となる画像を得たときの前記変位センサの計測値を特定し、
前記検査において、前記準備の処理で特定された計測値に所定大きさの正または負のオフセット値を加算した値を前記基準の距離として、前記撮像ユニットとモデルとの距離を調整して前記撮像装置による撮像を実行する、
ことを特徴とする光学的検査方法。
【請求項4】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、このワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて前記基板の電極と付属物との接続状態を検査する処理装置とを具備し、
前記撮像ユニットには、受光面を前記ワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部とが設けられており、
前記処理装置には、表示部および操作部と、前記ワーク支持部により支持されたワークに対する撮像ユニットの相対位置を計測する計測手段と、前記計測手段による計測値が基準の位置を示すまで前記ワーク支持部と撮像ユニットとの距離を調整した後に前記撮像装置に撮像を行わせ、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別する検査実行手段と、前記ワークのモデルを用いて前記検査の際のワーク支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、前記検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられており、
前記情報導出手段は、前記操作部からの調整操作を受け付けて前記ワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を前記操作部から受け付けたとき、そのときの計測手段による計測値を取得する手段とを具備し、
前記登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される、光学的検査装置。
【請求項5】
前記撮像ユニットには、前記撮像装置の視野に対応する領域に検出面を向けた変位センサが、さらに配備されており、
前記処理装置の計測手段は、前記変位センサからの出力信号を取り込んで、ワーク支持部に支持されているワークから撮像ユニットまでの距離を計測する手段である、請求項4に記載された光学的検査装置。
【請求項6】
表面に電極が形成された透光性を有する基板と、この基板の前記電極に異方性導電膜を介して電気接続されることにより前記基板に一体化される付属物とを具備するワークを水平な姿勢で支持するワーク支持部と、このワーク支持部の上方または下方に当該ワーク支持部に対して相対的に上下動可能に配備される撮像ユニットと、この撮像ユニットを制御しつつ、当該撮像ユニットにより生成された画像を用いて前記基板の電極と付属物との接続状態を検査する処理装置とを具備し、
前記撮像ユニットには、受光面を前記ワーク支持部に対向させた撮像装置と、この撮像装置の光軸に沿って光を照射する照明部と、前記撮像装置の視野に対応する領域に検出面を向けた変位センサとが設けられており、
前記処理装置には、表示部および操作部と、前記変位センサからの出力信号を取り込んで、ワーク支持部に支持されているワークから撮像ユニットまでの距離を計測する計測手段と、この計測手段による計測値が基準の距離を示すまで前記ワークと撮像ユニットとの距離を調整した後に前記撮像装置に撮像を行わせ、生成された画像を用いて前記基板の電極に生じた圧痕の状態を判別する検査実行手段と、前記ワークのモデルを用いて前記検査の際の撮像支持部と撮像ユニットとの距離の調整に用いる情報を導出する情報導出手段と、前記検査時のワークに対する撮像ユニットの基準の位置を示す情報が登録される登録手段とが設けられており、
前記情報導出手段は、前記操作部からの調整操作を受け付けて前記ワーク支持部と撮像ユニットとの距離を変更しながら、撮像装置による撮像および生成された画像を表示部に表示する処理を実行する手段と、この表示状態下で表示された画像から圧痕が消えたという判定入力を前記操作部から受け付けたとき、そのときのワーク支持部と撮像ユニットとの位置関係を基準に上下の各方向に探索範囲を設定し、設定した探索範囲内でワーク支持部と撮像ユニットとの位置関係を毎回変更して、前記撮像装置による撮像と前記変位センサによる計測とを複数回実行し、前記電極部分の輝度の差または輝度のばらつきが最小となる画像が得られたときの前記計測手段による計測値を取得する手段とを具備し、
前記登録手段には、情報導出手段が取得した計測値に所定大きさの正または負のオフセット値を加えた値、または当該計測値とオフセット値との組み合わせが登録される、光学的検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−190668(P2010−190668A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−34182(P2009−34182)
【出願日】平成21年2月17日(2009.2.17)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月17日(2009.2.17)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]