
光学素子評価方法および光学素子評価装置
【課題】二軸性を有する光学素子を正確に評価することができる光学素子評価技術を提供する。
【解決手段】入射面角度Φおよび入射角Θで、単色光21を評価対象10に入射し、評価対象10および検光子40を透過した透過光22の透過光強度I(Φ,Θ)を検出器50で検出する。透過光強度I(Φ,Θ)の検出は、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して行う。そして、検出した複数の透過光強度I(Φ,Θ)に基づいて、評価対象10の3つの主屈折率nX、nY、nZおよび厚さd、あるいは、評価対象10の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つおよび厚さdを評価する。
【解決手段】入射面角度Φおよび入射角Θで、単色光21を評価対象10に入射し、評価対象10および検光子40を透過した透過光22の透過光強度I(Φ,Θ)を検出器50で検出する。透過光強度I(Φ,Θ)の検出は、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して行う。そして、検出した複数の透過光強度I(Φ,Θ)に基づいて、評価対象10の3つの主屈折率nX、nY、nZおよび厚さd、あるいは、評価対象10の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つおよび厚さdを評価する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光学素子、特に、液晶表示装置等に用いられる二軸性を有する光学素子を評価するのに好適な光学素子評価方法および光学素子評価装置に関する。
【背景技術】
【0002】
偏光光学系に用いられる位相差板は、位相差板中を伝播する2つの固有偏光に対して異なる位相を付与する(2つの固有偏光の間に位相差を発生させる)ことで、位相差板を透過した光の偏光状態を変化させる機能を有する。位相差板は、一般的には、板状あるいは膜状に形成される。
位相差板等の光学媒質中を伝播する光に付与される位相は、光が感じる屈折率と伝播距離の積で与えられる。この積は、長さの単位を有し、1波長が光の電場・磁場の振動の1周期に対応する。光が感じる屈折率は、誘電率テンソルの3つの固有値の正の平方根で与えられる3つの主屈折率と、光が光学媒質中を伝播する方向(波面法線方向)で決定される。誘電率テンソルの3つの固有値に対応する3つの直交する固有ベクトルの方向を主軸方向(「屈折率主軸方向」と呼ばれる)とし、径の長さが主屈折率に等しい楕円体は、「屈折率楕円体」と呼ばれる。光の進行方向(波面法線方向)を法線とする屈折率楕円体の断面は、一般に楕円形であり、その楕円形の長軸方向および短軸方向が、光の電束ベクトルの振動方向であり、また、長軸の長さおよび短軸の長さが、光が感じる屈折率となることがよく知られている。この長軸方向および短軸方向に電束ベクトルの振動方向を有する偏光は、光学媒質中を進行しても偏光状態が変わらない性質を有しており、「固有偏光」と呼ばれる。異方性媒質では、固有偏光は、一般的に2つ存在する。異方性媒質内の偏光状態は、位相を考慮した、固有偏光の重ね合わせで記述される。
【0003】
3つの主屈折率のうちの2つが等しく、残りの1つと異なる光学媒質は、「一軸性媒質」と呼ばれる。一軸性媒質からなる位相差板(以下、「一軸性位相差板」という)は、一般的に、位相差板の表面内に、それぞれの方向の主屈折率が異なる2つの屈折率主軸を有し、位相差板の表面の法線方向(以下、「位相差板法線方向」という)に残り1つの屈折率主軸を有している。一軸性位相差板としては、水晶を板状に加工したものが広く用いられているが、樹脂フィルムを延伸したものが、安価かつ大面積を要求される液晶表示用に用いられている。例えば、STN(Super−Twisted Nematic)液晶表示素子において、表示色を白黒に補正するために用いられ、また、反射型液晶表示素子や半透過型液晶表示素子において、反射光を変調する反射モード表示のために用いられている。
一方、3つの主屈折率の全てが異なる光学媒質は、「二軸性媒質」と呼ばれる。二軸性媒質としては、斜方晶系や三斜方晶系等の無機結晶が知られているが、二軸性媒質からなる位相差板はほとんど用いられていなかった。ところで、近年、IPS(In−Plane Switching)液晶表示素子やVA(Vertical Alignment)液晶表示素子において、視野角特性の改善のために、二軸性媒質からなる位相差板(以下、「二軸性位相差板」という)が用いられるようになり、その工業的需要が急速に拡大している。液晶表示素子用の二軸性位相差板としては、樹脂フィルムを二軸延伸したものが広く用いられている。
二軸性位相板の品質を管理する場合には、一軸性位相差板の品質を管理する場合と異なり、厚さ方向の主屈折率も評価する必要がある。すなわち、二軸性位相差板の3つの主屈折率の全て(あるいは、3つの主屈折率と厚さを組み合わせた値)を評価することができることが重要である。
しかしながら、樹脂フィルムからなる二軸性位相差板は、厚さが数十μmと薄い。このため、二軸性を有する無機結晶を評価する場合のように、適当な形状に切り、光の屈折を実際に見るという直接的な評価方法を用いることができない。
【0004】
特許文献1〜5には、二軸性を有する光学素子(以下、単に「光学素子」という)の主屈折率を評価する方法が開示されている。
特許文献1には、入射面(光の進行方向と光学素子の表面の法線に平行な平面)を光学素子の表面内の2つの屈折率主軸の一方に平行とし、光学素子の表面にs偏光(電場ベクトルが入射面に直交する方向に振動する直線偏光)を入射した時の透過率を、入射角を変えて測定し、入射角と透過率との関係式から前記2つの屈折率主軸の他方の屈折率主軸の主屈折率を求め、求めた2つの主屈折率と透過光の位相差から残りの主屈折率を求める方法が開示されている。
特許文献2には、一定の入射角(光の進行方向と光学素子の表面の法線のなす角度)で二軸性位相差板の表面に光を入射した状態での、光学素子および検光子を透過した透過光の透過光強度の最大値と最小値を、光学素子の表面の法線に平行な回転軸を中心に試料を回転させながら測定し、測定した複数の透過光強度の最大値と最小値を用いて光学素子の3つの主屈折率を求める方法が開示されている。
特許文献3には、偏光変調器からの測定光を入射角0°と入射角±θ°で光学素子の表面に入射し、光学素子および検光子を透過した透過光の透過光強度を測定し、測定した透過光強度を用いて光学素子の3つの主屈折率を求める方法が開示されている。
特許文献4には、入射角0°で試料の表面に光を入射し、直交ニコルの状態で、光学素子および検光子を透過した透過光の透過光強度が最大になる最大入射面角度を測定するとともに、最大入射面角度において、透過光強度が最小になる最小入射角を測定し、測定した最大入射面角度と最少入射角を用いて、光学素子の3つの主屈折率を求める方法が開示されている。
特許文献5には、所定の入射面角度および入射角における試料のJones行列要素を、偏光状態が異なる3つ以上の入射光を光学素子の表面に入射した時の、光学素子を透過した透過光の偏光状態から求める方法が開示されている。
また、特許文献6には、光学素子を伝播する光の偏光状態を計算する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−302888号公報
【特許文献2】特開平1−213551号公報
【特許文献3】特開2005−3386号公報
【特許文献4】特開平1−121736号公報
【特許文献5】特開2006−243311号公報
【特許文献6】特開2002−318159号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1〜5に開示されている方法は、基本的に、屈折率楕円体を用いて解析を行っている。
しかしながら、特許文献1に開示されている方法は、光学素子中での光の進行方向を求めるために屈折角を計算しているが、2つの固有偏光に対する屈折角の平均値を用いている(近似を用いている)。実際には、特定の入射角で、光学素子の表面に斜めに入射した光が光学素子中を伝播する際、2つの固有偏光に対する屈折角は異なる(複屈折)。このため、特許文献1に開示されている方法では、光学素子(二軸性を有する光学素子)を正確に評価することができない。
特許文献2に開示されている計算式を用いてc−plateと呼ばれる位相差板を記述した場合、2つの固有偏光が感じる屈折率が等しく、位相差が発生しないことになる。しかしながら、c−plateの表面に、位相差板の表面の法線に対して斜めに光を入射した場合、c−plateを透過した透過光には位相差が発生する。したがって、特許文献2に開示されている方法では、二軸性位相差板を正しく評価することができない。
特許文献3に開示されている方法は、屈折率テンソル(屈折率楕円体を表す対称行列)を用いて光学素子を解析している。屈折率主軸の方向をそれぞれxyz座標系のx軸、y軸、z軸とした屈折率楕円体は、[式1]で表されるので、特許文献3の屈折率テンソルの成分は、この座標系では、[式2]で表される。ただし、特許文献3の図4のn1、n2、n3が右手系をなすとした。
【数1】

[式1]
【数2】
[式2]
この屈折率主軸を座標軸(xyz軸)としたxyz座標系で見た屈折率テンソルは、非対称成分が0となる対角行列を用いて表すことができる。任意の座標系で見たときの屈折率テンソルは、特許文献3に示されているように、屈折率テンソルに座標系変換を表す回転による変換則を適用することで得られる。
非対角項(n12、n13、n23)が0でない一般的な屈折率テンソルをZ軸周りに角度Ψ0回転させた時の屈折率テンソルは、[式3]で表される(上付き添字rotが回転を表す)。
【数3】
[式3]
これにより、特許文献3の[数2]の屈折率テンソルは、[式2]の屈折率テンソルをZ軸周りに回転させたものと同型であることが分かる。すなわち、特許文献3の[数2]の屈折率テンソルは、屈折率主軸([式1]のxyz座標系の座標軸)が特許文献3のXYZ座標系(実験室座標系)の座標軸である屈折率テンソルをZ軸周りに角度Ψ0回転させた時の屈折率テンソルを表している。
同様に、特許文献3の[数3]および[数4]の屈折率テンソルは、それぞれ[式2]の屈折率テンソルをZ軸回りに角度Ψ+およびΨ−回転させたものと同型である。
なお、非対角項(n12、n13、n23)が0でない一般的な屈折率テンソルをX軸回りに角度Ψ0回転させた時の屈折率テンソルは、[式4]で表される。
【数4】
[式4]
したがって、特許文献3に開示されている方法では、二軸性位相差板を正しく評価することができない。
特許文献4に開示されている方法は、平均屈折率を用いて屈折角を求めている(近似を用いている)。このため、特許文献4に開示されている方法では、光学素子(二軸性を有する光学素子)を正確に評価することができない。
特許文献5に開示されている方法は、所定の入射面角度および入射角に対して、個別にJones行列要素を求めている。このため、光学素子(二軸性を有する光学素子)の偏光特性をシミュレーションする場合、シミュレーションする視線方向(観測者が二軸性位相差板を見る方向で、透過光の進行方向に平行)全てにおいてJones行列要素を求める必要があり、効率的でない。
特許文献6には、光学素子中を伝播する光の偏光状態を計算する方法が開示されている。しかしながら、特許文献6には、光学素子(二軸性を有する光学素子)をどのように評価するかという評価方法が開示されていない。
本発明は、このような点に鑑みて創案されたものであり、二軸性を有する光学素子を正確に評価することができる光学素子評価技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の光学素子評価技術は、光学素子、特に、二軸性を有する光学素子、好適には樹脂フィルムからなる二軸性位相差板を評価する際に用いることができる。
【0008】
第1の発明は、光学素子評価方法に関する。
本発明の一つの光学素子評価方法は、二軸性を有する光学素子の、互いに直交する屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを評価する。なお、屈折率主軸のいずれをX軸、Y軸、Z軸とするかは任意であるが、樹脂フィルムからなる二軸性位相差板では、表面内の屈折率主軸がX軸、Y軸、厚さ方向の屈折率主軸がZ軸とされる。本発明の一つの光学素子評価方法は、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度が、光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、2つの固有偏光が光学素子中を伝播することにより発生する2つの固有偏光の間の位相差Γで決まることを利用して、光学素子の主屈折率nX、nY、nZと厚さdを評価している。実効的屈折率nZ,1、nZ,2は、以下の[式5]で表される。
【数5】
[式5]
ここで、Φは、光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面(光の進行方向と光学素子の表面の法線に平行な平面)のなす入射面角度である。また、Θは、光学素子の、光が入射する表面の法線(Z軸方向)と光の進行方向がなす入射角である。なお、実効的屈折率nZ,1、nZ,2に変えて、波数ベクトルのZ軸方向成分kZ,1=k0・nZ,1、kZ,2=k0・nZ,2を用いることもできる。k0=2π/λは、大気中での波数であり、λは、大気中での波長である(大気中の屈折率を1としている)。
入射面角度Φと入射角Θの組合せは、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せを用いる。好適には、少なくとも0°、45°、90°を含む入射面角度Φと複数の入射角Θの組合せが用いられる。
なお、透過光強度を測定する方法としては、適宜の方法を用いることができる。例えば、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度を測定する方法、単色の偏光を光学素子、位相差が既知である位相差板および検光子を透過させた透過光の透過光強度を測定する方法、これらの方法を組み合わせて測定する方法等を用いることができる。
本発明の一つの光学素子評価方法の一態様では、入射光強度の測定値と計算値に基づいて光学素子の主屈折率nX、nY、nZと厚さdを評価する。すなわち、入射面角度Φと入射角Θの組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)と、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dにより表される、複数の透過光強度Iexp(Φ,Θ)を測定した入射面角度Φと入射角Θの組合せに対する複数の透過光強度Ical(Φ,Θ)が一致するように、光学素子の主屈折率nX、nY、nZと厚さdを決定する。複数の透過光強度Iexp(Φ,Θ)と複数の透過光強度Ical(Φ,Θ)に基づいて光学素子の主屈折率nX、nY、nZと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
本発明の一つの光学素子評価方法の他の態様では、透過光の位相差の測定値と計算値に基づいて光学素子の主屈折率nX、nY、nZと厚さdを評価する。すなわち、入射面角度Φと入射角Θの複数の組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)を用いて、透過光の位相差δexpを、入射面角度Φと入射角Θの複数の組合せに対して算出する。また、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差δcalを、入射面角度Φと入射角Θの組合せに対して算出する。そして、測定した複数の透過光強度Iexp(Φ,Θ)を用いて算出した複数の透過光の位相差δexpと、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差δcalが一致するように、光学素子の主屈折率nX、nY、nZと厚さdを決定する。複数の透過光の位相差δexpと複数の透過光の位相差δcalに基づいて光学素子の主屈折率nX、nY、nZと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
【0009】
二軸性を有する光学素子では、主屈折率nX、nY、nZと厚さdを決定することと、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定することは、本質的に同じことである。
本発明の他の光学素子評価方法は、二軸性を有する光学素子の、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。本発明の他の光学素子評価方法は、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度が、光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、2つの固有偏光が光学素子中を伝播することにより発生する2つの固有偏光の間の位相差Γで決まることを利用して、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価している。なお、実効的屈折率nZ,1、nZ,2に変えて、波数ベクトルのZ軸方向成分kZ,1=k0・nZ,1、kZ,2=k0・nZ,2を用いることもできる。k0=2π/λは、大気中での波数であり、λは、大気中での波長である(大気中の屈折率を1としている)。
入射面角度Φと入射角Θの組合せは、3つ以上の入射面角度Φと複数の入射角Θとの組合せを用いる。好適には、少なくとも0°、45°、90°を含む入射面角度Φと複数の入射角Θとの組合せが用いられる。
本発明の他の光学素子評価方法の一態様では、入射光強度の測定値と計算値に基づいて垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。すなわち、入射面角度Φと入射角Θの組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)と、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dにより表される、複数の透過光強度Iexp(Φ,Θ)を測定した入射面角度Φと入射角Θの組合せに対する複数の透過光強度Ical(Φ,Θ)が一致するように、光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する。複数の透過光強度Iexp(Φ,Θ)と複数の透過光強度Ical(Φ,Θ)に基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
本発明の他の光学素子評価方法の他の態様では、透過光の位相差の測定値と計算値に基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。すなわち、入射面角度Φと入射角Θの複数の組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)を用いて、透過光の位相差δexpを、入射面角度Φと入射角Θの複数の組合せに対して算出する。また、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差δcalを、入射面角度Φと入射角Θの組合せに対して算出する。そして、測定した複数の透過光強度Iexp(Φ,Θ)を用いて算出した複数の透過光の位相差δexpと、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差δcalが一致するよう、光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する。複数の透過光の位相差δexpと複数の透過光の位相差δcalに基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
【0010】
第2の発明は、前記した光学素子評価方法を実施する光学素子評価装置に関する。
本発明の光学素子評価装置は、単色光を照射する光源、偏光子、支持台、検光子、検出装置、解析装置を備えている。
光源は、単色光を照射することができればよく、レーザー等の単色光源や、白色光源と単色化機構(例えば、分光器)を有する光源を用いることができる。なお、単色光は、厳密に単一の波長である必要はなく、主屈折率の波長分散を無視することできる程度の波長幅の光であればよい。偏光子は、単色光源から照射された単色光の中から透過軸方向の直線偏光を透過する。支持台は、偏光子を透過した光が光学素子の表面に入射するように光学素子を支持する。検光子は、光学素子を透過した光の中から、透過軸方向の直線偏光を透過する。検出装置は、光学素子と検光子を透過した透過光の透過光強度を検出する。解析装置は、検出装置で検出した透過光強度を入力する。
また、本発明の光学素子評価装置は、支持台に支持される光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、光学素子の、光が入射する表面の法線(Z軸方向)と光の進行方向のなす入射角Θを調整可能に構成されている。すなわち、支持台に支持される光学素子が、光源からの光の進行方向に垂直な回転軸および当該回転軸に垂直な回転軸の回りに、光源に対して相対的に回転可能に構成されている。例えば、光学素子を、光の進行方向に垂直な回転軸の回りに回転させる回転機構と、光の進行方向に垂直な回転軸に垂直な回転軸の回りに回転させる回転機構が設けられる。あるいは、光の進行方向に垂直な回転軸に垂直な回転軸の回りに偏光子を回転させる回転機構が設けられる。あるいは、光学素子の、光が入射する表面の法線に垂直な回転軸の回りに光源、偏光子、検光子、検出装置等を回転させる回転機構が設けられる。
そして、解析装置は、請求項1〜7のいずれかに記載の方法を用いて光学素子を評価する。
なお、支持台に支持される光学素子と検光子の間に、位相差が既知である位相差板を配置してもよい。また、偏光子、検光子、位相差が既知である位相差板を回転させる回転機構を用いてもよい。
【発明の効果】
【0011】
本発明の光学素子評価方法および光学素子評価装置を用いることにより、異なる3つの主屈折率nX、nY、nZと厚さdを有する光学素子(二軸性を有する光学素子)を正確に評価することができる。
【図面の簡単な説明】
【0012】
【図1】二軸性位相差板中の2つの固有偏光の光路の模式図である。
【図2】評価装置の一実施の形態の模式図である。
【発明を実施するための形態】
【0013】
本発明の光学素子評価方法および光学素子評価装置の実施の形態を説明する。以下では、二軸性位相差板を評価する場合について説明する。また、評価対象である二軸性位相差板は、二軸性位相差板の表面内および二軸性位相差板の表面の法線方向(位相差板法線方向)に屈折率主軸(主屈折率nX、nY、nZ)を有するものとする。勿論、本発明の光学素子評価方法および光学素子評価装置は、二軸性位相差板に限定されず、二軸性を有する光学素子を評価する際に用いることができる。
なお、光学媒質中を伝播する光に付与される位相差(Phase Difference)は、光学遅延(Optical retardation)とも呼ばれ、単にリタデーションと略されることもある。一方、光学媒質の主屈折率の差と光学媒質の厚さの積は、表面内に屈折率主軸を有する光学媒質に対し、表面の法線に平行に光を入射した場合に発生する位相差(光学遅延)に等しいことから、この積もリタデーションと呼ばれている。このリタデーションは、位相差(光学遅延)を表すリタデーションと混同し易いが、斜め入射などの一般的な状況で発生する位相差(光学遅延)とは異なる。本明細書では、光学媒質中を伝播する光に付与される位相差(光学遅延)を「位相差」と呼び、光学媒質の主屈折率の差と光学媒質の厚さの積を「リタデーション」と呼ぶ。
【0014】
[第1の実施の形態]
まず、二軸性位相差板中を光が伝播する際の動作を説明する。なお、以下では、「二軸性位相差板」を、単に「位相差板」という。位相差板は、位相差板の表面内および位相差板法線方向(光が入射される表面の法線方向)に屈折率主軸を有している
ここで、XYZ座標系は、位相差板の3つの直交する屈折率主軸の方向(屈折率主軸方向)を座標軸(X軸、Y軸、Z軸)とする座標系(「主軸座標系」という)であり、Z軸を位相差板法線方向として定義する。
【0015】
大気中や位相差板中を伝播する光は、一様(等方という意味ではなく、並進対称性があるという意味である)な光学媒質中でのMaxwell方程式の解である平面波で表される。具体的には、電場ベクトルE(t,r)と磁場ベクトルH(t,r)が[式6]で与えられる平面波で表される。
【数6】
[式6]
ここで、E0とH0は、それぞれ電場と磁場の振動方向と大きさを表すベクトル(以下、単に「電場ベクトル」および「磁場ベクトル」という)である。kは、波面法線ベクトルである。tは、観測する時間である。rは、観測する位置を表すベクトルである。ωは、角周波数である。iは、虚数単位である。|k|=2πn/λは、波数と呼ばれる。nは、光学媒質の屈折率であり、λは、大気中での光の波長(大気の屈折率を「1」とする)であり、πは、円周率である。[式6]の右辺の括弧内のk・r−ω・tは、光の位相と呼ばれる量である(位相を複素数の偏角で表す複素数表示を用いている)。
位相差板中を伝播する2つの固有偏光では、波面法線ベクトルk(屈折率n)が異なるため、伝播により付与される位相差が異なる。ωtは、偏光状態に関係なく共通なので、2つの固有偏光間の位相差による偏光状態の変化を考察する際は無視することができる。
【0016】
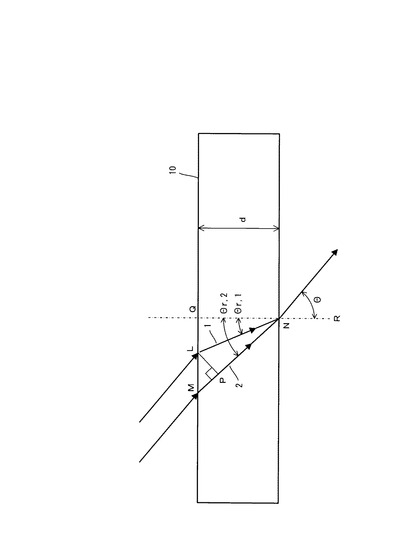
位相差板10中の2つの固有偏光1、2の光路の模式図を図1に示す。L点から入射した光の固有偏光1の成分は、屈折角Θr,1で伝播し、N点から出射するものとする。同様に、M点から入射した光の固有偏光2の成分は、屈折角Θr,2で伝播し、N点から出射するものとする。線分LNと線分MNは、それぞれ固有偏光1と2の波面法線ベクトルの方向を示す。L点から線分MNに引いた垂線と線分MNとの交点をP、N点から位相差板10の位相差板法線方向に沿って伸ばした線と入射側の表面との交点をQとする。また、2つの固有偏光1および2が感じる屈折率を、それぞれn1’およびn2’とする。
固有偏光2の波面法線ベクトルは、線分PNと平行であり、線分PLと直交する。つまり、線分PLは、固有偏光2の等位相面(波面)であり、P点での固有偏光2の位相とL点での固有偏光2(図示していない)の位相は等しい。また、L点で、位相差板10の外部と内部の光の位相は連続しているので、L点での固有偏光1の位相とL点での固有偏光2の位相は等しい。よって、L点とP点は、固有偏光1と2の間に発生する位相差を考えるときの基準となる。
【0017】
固有偏光1がLN=d/cosΘr,1を伝播すると、固有偏光1の位相は、[式7]で表される△1進む(位相を波長単位で表している)。
【数7】
[式7]
ここで、dは、位相差板10の厚さである。
【0018】
次に、PNを伝播する固有偏光2の位相を考える。
ここで、MQ=d・tanΘr,2、LQ=d・tanΘr,1であるから、PN=MN−MP=d/cosΘr,2−d・sinΘr,2(tanΘr,2−tanΘr,1)である。
よって、固有偏光2がPNを伝播すると、固有偏光2の位相は、[式8]で表される△2進む。
【数8】
[式8]
【0019】
Θを位相差板10の表面に入射する光の入射角(光の進行方向と位相差板法線方向(Z軸)とのなす角度)、Φを光の進行方向の方位角(入射面角度)(光の進行方向の位相差板10の表面への射影と位相差板10の表面の基準軸(この場合はX軸)とのなす角度)とすると、固有偏光j(=1または2)の波面法線ベクトルkjは、[式9]で表される。
【数9】
[式9]
2つの固有偏光jが感じる屈折率nj’と屈折率Θr,jは、[式10]で表される。
【数10】
[式10]
ここで、j(=1または2)は、固有偏光を区別する添字である。k0=2π/λは、大気中での波数(大気の屈折率は「1」としている)である。kZ,jは、固有偏光jの波面法線ベクトルkjのZ軸方向成分である。kX、kYは、波面法線ベクトルkjのX軸方向成分、Y軸方向成分である。
【0020】
位相差板10中を伝播することで固有偏光jに付与される位相△jを表す[式7]および[式8]に[式10]を代入すると、[式11]が得られる。
【数11】
[式11]
[式11]の右辺第2項は、固有偏光1と2で共通であり、偏光状態に影響を与えないので無視することができる。この共通項は、位相差板10の表面に対する波面法線ベクトルの接線成分に由来する位相である。したがって、位相差板10中を伝播することで固有偏光jに付与される位相△jは、[式12]で表すことができる。
【数12】
[式12]
したがって、固有偏光jの波面法線ベクトルkjのZ軸方向(位相差板法線方向)成分kZ,jがわかれば、位相差板10を透過することで固有偏光jに付与される位相△jを求めることができる。
nZ,j=kZ,j/k0とすると、形式上は、厚さd、屈折率nZ,jを有する光学媒質を光が透過した場合と同形式で記述することができる。本発明では、nZ,jを「実効的屈折率」という(実際に、固有偏光jが感じる屈折率とは異なる)。
【0021】
なお、[式10]を用いれば、固有偏光jが感じる屈折率nj’や屈折角ΘZ,jを求めることもできる。しかしながら、本実施の形態では、屈折率nj’や屈折角ΘZ,jを求める必要がない。また、従来技術のように、屈折角を求めるために、屈折率や屈折角の平均を用いるといった近似を採用する必要もない。
【0022】
次に、波面法線ベクトルkのZ軸方向成分kZを求める。光の周波数では磁気双極子が応答しないため、比透磁率は1で等方的であるする。また、非伝導性であるとして、Maxwell方程式から磁場ベクトルH0を消去すると、[式13]が得られる。
【数13】
[式13]
ここで、μoは、透磁率であり、εは、誘電率テンソルである。また、×はベクトル同士の外積演算を表す記号である。
【0023】
εの主軸座標系(屈折率主軸がXYZ座標系のX軸、Y軸、Z軸と一致)で[式13]を書き下ろすと、[式14]が得られる。
【数14】
[式14]
ここで、nX、nY、nZは、各軸方向の主屈折率である。kX、kY、kZは、波面法線ベクトルkの各軸方向の成分である。EX、EY、EZは、電場ベクトルE0の各軸方向の成分である。
[式14]の導出には、真空の誘電率ε0=1/(μ0・c02)の関係と主軸XYZ座標系である(屈折率主軸がXYZ座標系のX軸、Y軸、Z軸と一致している)こと(εab=ε0・εa・δab=ε0・na2・δabと書けること)を用いた。なお、aとbは、X、YまたはZのいずれかであり、δabは、クロネッカーのδ関数であり、c0は、真空中の光速である。
【0024】
入射面とXZ面のなす角度がΦである場合、kX=k0・sinΘ・cosΦ、kY=k0・sinΘ・sinΦである。[式14]が(EX、EY、EZ)t(上付き添字tは転置行列を表す)に対して非自明な解を持つためには、左辺の3×3の行列式が0となることが必要十分条件である。この方程式を解くと、[式15]で表される、2つの固有偏光j(=1または2)に対応する2つの正のkZ,jの解が得られる。
【数15】
[式15]
【0025】
よって、2つの固有偏光j(=1または2)に対する実効的屈折率nZ,j=kZ,j/k0は、[式16]で与えられる。
【数16】
[式16]
【0026】
[式12]と[式16]により、位相差板10中を伝播する2つの固有偏光j(=1または2)に付与される位相△jを算出することができる。
[式16](あるいは[式15])は、Maxwell方程式から直接導いており、また、透磁率の等方性と非伝導性という広く知られている(妥当性の高い)仮定以外の仮定を用いていない。このため、位相差板10中を伝播する2つの固有偏光j(=1または2)に付与される位相△jを正確に求めることができる。
【0027】
任意の偏光状態の光を位相差板の表面に入射した時、位相差板を透過した透過光の偏光状態は、よく知られている方法、例えば、拡散Jones行列法や4×4行列法等を用いて計算することができる。また、位相差板を透過した透過光の透過光強度も計算することができる。求められる精度と計算時間等から、適宜の計算方法を選択すればよい。
例として、拡張Jones行列法を用いて計算する方法を説明する。入射偏光の電場ベクトルのs偏光(入射面に直交する方向に振動する直線偏光)成分をEins、p偏光(入射面に平行な方向に振動する直線偏光)成分をEinpとし、入射光の電場ベクトルを(Eins,Einp)tと表す。同様に、位相差板を透過した透過光の電場ベクトルのs偏光成分をEouts、p偏光成分をEoutpとし、透過光の電場ベクトルを(Eouts,Eoutp)tと表す。入射光の電場ベクトルと透過光の電場ベクトルは、[式17]の関係にある。
【数17】
[式17]
ここで、Jは、拡張Jones行列と呼ばれる行列である。
【0028】
また、Pは、伝播行列と呼ばれる行列であり、[式18]で表される。伝播行列Pは、固有偏光1と2が位相差板10中を伝播する際に、各固有偏光に異なる位相が付与されることを表す行列である。伝播行列Pの値は、主屈折率nX、nY、nZ、入射光の入射面角度Φおよび入射角Θ、[式16]を用いて算出したnZ,1とnZ,2(あるいは[式15]を用いて算出したkZ,1とkZ,2)と、位相差板10の厚さdとにより求めることができる。
【数18】
[式18]
ここで、Γ=(nZ,2−nZ,1)dは、位相差板10で固有偏光1と2の間に発生する位相差(「位相差板で発生する位相差」という)である。行列に乗算される、固有偏光1と2に共通に付与される位相差は、偏光状態に影響を与えないので無視することができる。したがって、伝播行列Pは、[式18]の最終段の式で表すことができる。
【0029】
DinとDoutは、ダイナミカル行列と呼ばれ、位相差板10外部の光のs偏光成分とp偏光成分が、位相差板10内部の固有偏光1および2とどの程度の割合で交じり合うかを表す(各偏光成分間の透過率を成分とした)行列である。具体的な式は、非常に複雑であるためここでは示さない。詳しくは、「Optics of Liquid Crystal Displays」(8.1節,306〜343頁,Pochi Yeh&Claire Gu著,John Wiley&Sons,Inc.)を参照。
[式17]と[式18]は、DinとDoutの具体的な式に無関係に、透過光の電場ベクトル(Eouts,Eoutp)tが、位相差板10で発生する位相差Γをexp(ik0Γd/2)およびexp(−ik0・Γ・d/2)形で)含む項の線形結合で表されることを示す。
【0030】
以上のように、位相差板10の主屈折率nX、nY、nZ、位相差板10の厚さd、入射面角度Φおよび入射角Θから、透過光の電場ベクトル(Eouts,Eoutp)tを計算することができる。このことは、位相差板10の主屈折率nX、nY、nZと位相差板10の厚さdから、任意の入射面角度Φおよび入射角Θにおける、位相差板10を透過した透過光の偏光状態を計算することができることを示している。
【0031】
以上は、位相差板10中の光の伝播、位相差板10中を伝播することで固有偏光1と2に付与される位相、位相差板10を透過した透過光の偏光状態に関する説明である。次に、以上の説明をもとに、本実施の形態の光学素子評価方法を説明する。
位相差板(評価対象)を透過した透過光の強度(透過光強度)Iは、計算で求めた透過光の電場ベクトル(Eouts,Eoutp)tから、[式19]を用いて計算することができる。透過光強度Iとしては、例えば、位相差板および検光子を透過して受光器で受光された透過光の透過光強度、あるいは、位相差板と、任意に挿入された既知の位相差板および検光子を透過して受光器で受光された透過光の透過光強度を用いることができる。
【数19】
[式19]
ここで、φは、検光子40の透過軸方向41である。Wは、評価対象10と検光子40の間に任意に挿入された既知の位相差板60のJones行列である。Etは、検光子40に入射する前の光の電場ベクトルである。αは、任意に挿入された既知の位相差板60の遅相軸方向であり、τは既知の位相差板60の位相差(角度単位)である。既知の位相差板60が挿入されない場合には、τ=0に設定することで、Wは、単位行列(対角成分が「1」、非対角成分が「0」の行列)となる。[式19]は、既知の位相差板60を1枚挿入する場合を想定しているが、既知の位相差板60を複数枚挿入する場合は、各位相差板のJones行列を乗じればよい。
【0032】
位相差板の実効的屈折率nZ,1とnZ,2を求める[式16]あるいはkZ,1とkZ,2を求める[式15]は、Maxwell方程式から直接導いており、また、透磁率の等方性と非伝導性という広く知られている(妥当性の高い)仮定以外の仮定を用いていない。このため、透過光強度Iを正確に計算することができる。
【0033】
位相差板(評価対象)を透過した透過光の電場ベクトル(Eouts,Eoutp)が、位相差板で発生する位相差Γを含む項の線形結合で表されているので、位相差板を透過した透過光の透過光強度Iも、位相差板で発生する位相差Γに依存する形で与えられる。
位相差板で発生する位相差Γは、[式20]で与えられる。なお、符号を逆とした定義もできるが、本実施の形態では、[式20]の定義を使用している。形式上は、一軸性位相差板の位相差板法線方向に平行に光を入射した時(垂直入射時)の位相差と同形式、つまり、屈折率の差と厚さの積で記述することができる。
【数20】
[式20]
【0034】
[式20]をsinΘでマクローリン展開すると、[式21]が得られる。
【数21】
[式21]
ここで、△YX=nY−nX、△ZX=nZ−nXは、いわゆる複屈折率であり、微小量なのでそれぞれ2次項までとっている。光を評価対象の表面に入射する一般的な評価方法では、入射角Θを大きくとると、光の照射領域が広くなり、その領域内での評価対象の厚さの変化の影響を受ける可能性が高くなる。そのため、入射角Θは、あまり大きくとらない方が好ましい。よって、入射角Θのより高次の項の影響は無視する。
【0035】
主屈折率nX、nY、nXと厚さdが未知である場合、未知なパラメータは、nX、nY[=nX+△YX]、nZ[=nX+△ZX]、dの4つである。これらの4つのパラメータを決定するためには、独立な測定値が4つ以上必要である。[式21]では、定数項(第1項)の係数、sin2Θの項(第2項)の係数、sin4Θの項(第3項)の係数を求めることができる。
[式21]では、sin2Θの項の係数は、Φに対して異なる依存性を持つ2つの量(a1、a2)を有するので、最低、相異なる2つの入射面角度Φで透過光強度を測定すれば、[式21]の係数a1とa2を求めることができる。また、sin2Θの項については、異なる入射面角度Φでの透過光強度の測定を追加しても、これ以上の情報は得られない。すなわち、sin2Θの項までには、独立な量は3つしかない。したがって、sin4Θの項の係数の3つの量(b1、b2、b3)のうち最低1つを決めないと、評価対象の評価に必要な4つの独立な測定値は得られない。
【0036】
Φ=0°とΦ=90°での測定で得られるsin4Θの項の係数をそれぞれc0、c90とすれば、原理上は、[式22]から、b2と(b1−b3)が得られる。
【数22】
[式22]
【0037】
しかしながら、sin4Θの項はsin2Θの項に比べて小さいので、sin4Θの項の係数の測定精度は高くない。[式21]を見ると、sin4Θの項の係数は、cos2Φの他にcos4Φを含むことがわかる。そこで、cos4Φに対する依存性を利用する。つまり、相異なる3つ以上の入射面角度Φで透過光強度の測定を行うことで、b1、b2、b3をそれぞれ求めるようにする。
【0038】
相異なる入射面角度Φ[=α,β,γ]での測定で得られるsin4Θの項の係数をそれぞれcα、cβ、cγとすれば、[式23]から、b1、b2、b3が得られる。
【数23】
[式23]
このことにより、未知のパラメータを決める際の拘束条件が、上記の2つの入射面角度Φ(Φ=0°とΦ=90°)での測定の場合より1つ増やすことができる。また、これ以上の情報がないことも、[式21]からわかる。つまり、測定精度の高くないsin4Θの項の係数を利用せざるを得ない位相差板評価に対して、4つの未知なパラメータ(主屈折率3つと厚さ)に関する最大限の情報を引き出すためには、相異なる3つ以上の入射面角度Φで、入射角Θを変えながら、位相差板で発生する位相差が影響を与える物理量を測定する必要がある。それにより、位相差板の主屈折率nX、nY、nZと厚さdを精度よく評価することができる。
ただし、位相差(評価対象で発生した位相差または透過光の位相差)は直接測定することができないので、評価対象に入射した光の状態の位相差による変化を、検光子を介した透過光強度の変化として測定する。透過光強度は、未知のパラメータに適当な値を仮定すれば[式15]〜[式19]を用いて計算することができる。したがって、共役勾配法や準ニュートン法を用いた最小二乗法等の逐次最適化手法を用いて、透過光強度の計算値と測定値が一致(必要な精度以内に近接)するよう、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定することができる。
【0039】
透過光強度と透過光の偏光状態、位相差板で付与される位相、位相差板で発生する位相差、それらの入射角および入射面角度依存性は、[式15]〜[式21]によって一連に関係付けられている。したがって、透過光強度の計算値と透過光強度の測定値が一致(必要な精度以内に近接)するように、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定することと、位相差板で発生する位相差の入射角および入射面角度依存性を表す係数の計算値と測定値が一致(必要な精度内に近接)するように、主屈折率nX、nY、nZと厚さdという未知のパラメータを決定することは、本質的に同じことである。
【0040】
3つ以上の入射面角度Φが必要であるということは、入射面と位相差板の面内の屈折率主軸が平行な場合以外の入射面角度Φが最低1つ必要であることを示している。本実施の形態の光学素子評価方法では、位相差板の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、かつ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度Φで透過光強度を測定している。これにより、位相差板の主屈折率nX、nY、nZと厚さdを正確に評価することができる。
また、一般的に、主屈折率は、波長に依存する(「波長分散」と呼ばれる)性質を有する。このため、波長が異なる複数の光を用いる評価方法では、波長域が広い場合に正確に測定することが困難である。これに対し、本実施の形態の光学素子評価方法は、単一の波長の光(「単色光」と呼ばれる)を用いて評価することができるので、主屈折率の波長分散に伴う問題を考慮する必要がない。したがって、レーザー光や白色光を分光器や干渉フィルタ等で分光した、実用上単色光とみなせる光(波長分散が無視できるほど波長域の狭い光)を用いることで、正確に評価することができる。
【0041】
位相差板で発生する位相差Γの入射角および入射面角度依存性を表す、[式20]のsin4Θの項の係数内のb1等の測定精度について考える。[式23]のように、あるパラメータから別のパラメータを計算により求める場合、求めるパラメータの精度は、誤差伝播の法則により推測することができる。すなわち、求めるパラメータFと既知のnP個のパラメータの組Px(x=1,2,…,nP)が関数F=f(P1,P2,…,PnP)の関係で結ばれている場合、パラメータFの不偏分散(標準偏差の二乗)σF2は、Pxの不偏分散σPx2を用いて、[式24]により表される。
【数24】
[式24]
ここで、2番目の等号は、Pxの分散σPx2が全て等しくσである時に成立する。
【0042】
簡単のため、相異なる入射面角度Φ[=α,β,γ]で求めた、[式20]のsin4Θの項の係数cα、cβ、cγが、各入射面角度において共通に標準偏差σで求められたとすると。[式23]、[式24]から、係数b1、b2、b3の標準偏差σb1、σb2、σb3を最小にするα、β、γを求めると、α、β、γは、0°、45°、90°のいずれかという条件が得られる。なお、α、β、γは、互いに異なるように選ぶものとする。例えば、α=0°、β=45°、γ=90°とする。この時のσb1、σb2、σb3、は、[式25]で表される。
【数25】
[式25]
【0043】
以上のように、入射面角度Φを変えることによって、[式20]のsin4Θの項の係数内のb1等の測定精度が変化する。入射面角度Φには、この係数の測定精度からみた最適な組合せがある。したがって、位相差板の主屈折率nX、nY、nZと厚さdという未知パラメータをより正確に評価するためには、0°、45°、90°の3つを含む3つ以上の入射面角度Φで測定を行うことが望ましい。
【0044】
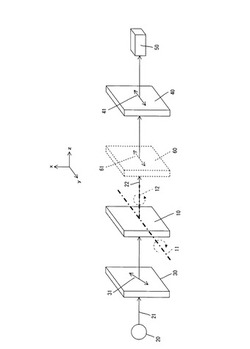
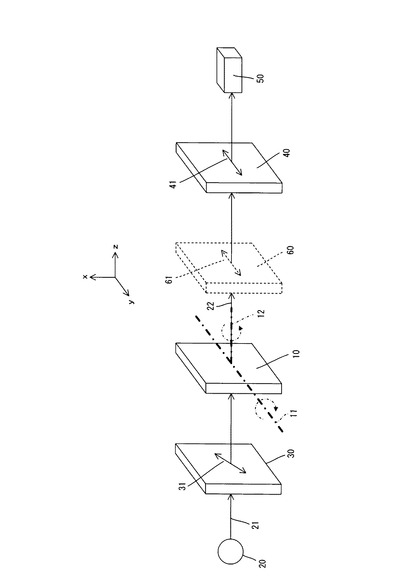
本実施の形態の光学素子評価方法を実施する光学素子評価装置を説明する。図2に、光学素子評価装置の一実施の形態の模式図を示す。なお、xyz座標系は、互いに直交する座標軸(x軸、y軸、z軸)を有する測定座標系であり、z軸を光の進行方向として定義する。
図2に示されている光学素子評価装置は、光源20、偏光子30、検光子40、検出器50を有している。なお、図2では、光源20、偏光子30、位相差板(検査対象)10、既知の位相差板60、検光子40および検出器50は、z軸に沿って順に配置されている。
光源20は、単一の波長の光(単色光)を照射する。なお、光源20から照射される光は、厳密に単一の波長である必要はなく、主屈折率の波長分散を無視することできる程度の波長幅の光(実用上単色光とみなせる光)であればよい。光源20としては、単色光を照射する単色光源や、白色光を照射する白色光源と分光器等の単色化機構を有する光源を用いることができる。例えば、単色光源であるレーザーを用いることにより、半値全幅が1nm以下である光を得ることができる。また、白色光源(例えば、ハロゲンランプ)と分光器を用いることにより、半値全幅が1〜5nm程度の光を得ることができる。また、白色光源(例えば、ハロゲンランプ)とレーザー用の干渉フィルタを用いることにより、半値全幅が10nm程度の光を容易に得ることができる。光源20から照射された光21は、z軸に平行に進行する。
位相差板(検査対象)10は、光21の進行方向(z軸)に直角な方向(y軸)に平行な回転軸11を中心に回転可能であるとともに、光21の進行方向(z軸)に平行な回転軸12を中心に回転可能に設置される。例えば、回転軸12を中心に位相差板10を回転させる回転機構を支持台に取り付け、回転軸11を中心に支持台(位相差板20)を回転させる回転機構を設ける。なお、光21が入射する表面に平行な屈折率主軸の主屈折率をnX、nY、光21が入射する表面の法線方向(位相差板法線方向)に平行な屈折率主軸の主屈折率をnZとする。
偏光子30および検光子40としては、例えば、グランプムソンプリズムのような消光比の高い偏光プリズムが用いられる。また、樹脂製の偏光膜を有する偏光フィルタを用いることもできる。この場合、消光比が少し低下するが、[10000:1]程度の消光比が得られるため、実用上は十分使用することができる。なお、光21の進行方向(z軸)に平行な回転軸を中心に偏光子30や検光子40を回転させる回転機構や回転角度を検出する回転角度検出器を用いるのが好ましい。
検出器50は、受光した光の強度を電気信号に変換して出力する。検出器50としては、光ダイオードや光電子増倍管等が用いられる。検出器50の出力信号は、検出器50で受光する光の強度に対して線形に変化するのが好ましいが、非線形であってもよい。非線形の場合には、出力信号と光の強度との対応関係を示す対応表や検量線等を用いて、出力信号から光の強度を判別する。
既知の位相差板60としては、水晶あるいは樹脂製の波長板を使用することができる。位相差板60は、検査対象10と検光子40の間に挿入される場合と挿入されない場合があるため、位相差板60を挿入・抜去する挿抜機構を用いるのが好ましい。なお、位相差板60の遅相軸方向61が検光子40の透過軸方向41と平行あるいは直交している状態は、偏光光学的には、位相差板60が検査対象10と検光子40の間に挿入されている状態あるいは抜去されている状態と等価である。したがって、挿抜機構の変わりに、位相差板60を、光21の進行方向(z軸)に平行な回転軸を中心に回転させる回転機構を用いることができる。
また、図示はしていないが、検出器50の出力信号を解析する、パソコン等の解析装置が設けられている。解析装置は、通信回線(有線あるいは無線)を介して検出器40の出力信号を入力する。勿論、検出器50の出力信号を携帯可能な記憶媒体に記憶し、記憶媒体から検出器40の出力信号を入力してもよい。
前記した検査対象10、検光子30、偏光子40、既知の位相差板60を回転させる回転機構としては、手動で回転させる回転機構、あるいは、制御装置によって制御されるステッピングモータ等の駆動装置で回転させる回転機構を用いることができる。なお、回転角度を検出する回転角度検出器を用いるのが好ましい。また、解析装置が、回転機構を制御する制御装置を兼用してもよい。
【0045】
次に、第1の実施の形態の光学素子評価方法を、図2に示した光学素子評価装置を用いて実行する手順を説明する。なお、事前に、光21が入射する位相差板10の表面の法線方向(位相差板法線方向)がz軸と平行であり(入射角Θ=0°)、光21が入射する位相差板10の表面に平行な屈折率主軸の一方(本実施の形態では、主屈折率nXに対応する屈折率主軸とする)がx軸と平行(光の入射面角度Φ=0°)に設定されているものとする。
【0046】
(ステップ1)
(1a)位相差板10を回転軸12回りに回転させ、x軸と位相差板10の表面の屈折率主軸の一方(主屈折率nXに対応する屈折率主軸)のなす角度を−Φ1に設定する。これにより、位相差板10の表面の屈折率主軸の一方から見た入射面角度ΦがΦ1に設定される。この状態で、位相差板10を回転軸11回りに回転させ、位相差板法線方向に対する光21の入射角ΘをΘ1に設定する。そして、透過光強度I(Φ1,Θ1)を測定(検出)する。
検光子40の透過軸方向41は任意であるが、直交する2方向を含む複数の透過軸方向について、それぞれ透過光強度を測定することが望ましい。また、任意で、位相差が既知である位相差板60を、その透過軸方向61を任意の方向に向けて、位相差板10と検光子40の間に挿入してもよい。例えば、検光子40の透過軸方向41をx軸方向に向けた時の透過光強度、検光子40の透過軸方向41をy軸方向に向けた時の透過光強度、検光子40の透過軸方向41をx軸から45°方向に向けたときの透過光強度、検光子40の透過軸方向41を45°方向に向けた状態で、1/4波長板(光の波長の1/4の位相差を持つ位相差板)60を、遅相軸方向61をx軸方向に向けて挿入した時の透過光強度から、偏光状態を示すストークスパラメータを求めることができる。
(1b)位相差板10を回転軸11回りに回転させて、入射角Θを異なる複数の入射角Θh(h=1,2,…)に設定する。そして、各入射角Θhに対して(ステップ1a)を繰り返す。
(ステップ1)により、入射面角度Φ1と複数の入射角Θh(h=1,2,…)の組み合わせに対して、透過光強度Iexp(Φ1,Θh)を測定する。なお、入射角Θh(h=1,2,…)には、0°(位相差板法線方向(z軸)に平行)が含まれているのが好ましい。
【0047】
(ステップ2)
位相差板10を回転軸12回りに回転させて、入射面角度Φを異なる複数の入射面角度Φg(g=1,2,…)に設定する。そして、各入射面角度Φgに対して、(ステップ1)を繰り返す。
(ステップ1)および(ステップ2)により、入射面角度Φg(g=1,2,…)と入射角Θh(h=1,2,…)の組み合わせに対して、透過光強度Iexp(Φg,Θh)を測定する。入射面角度Φgは、相異なる3つ以上に設定する。なお、入射面角度Φgには0°、45°、90°が含まれているのが好ましい。
【0048】
(ステップ3)
(3a)位相差板10の主屈折率nX、nY、nZと厚さdを適当な値に設定し、透過光強度Iexp(Φg,Θh)の測定で用いた検光子40の透過軸方向41、回転軸12回りの回転角(光21の入射角Θg)、回転軸11回りの回転角度(入射面角度Φh)の組合せそれぞれについて、[式16]〜[式19]を用いて透過光強度Ical(Φg,Θh)を計算する。
(3b)ステップ(3a)で求めた透過光強度Ical(Φg,Θh)と測定した透過光強度Iexp(Φg,Θh)が一致(必要な精度以内に近接)するよう、共役勾配法や準ニュートン法を用いた最小二乗法等の逐次最適化手法を用いて、位相差板10の主屈折率nX、nY、nZと厚さdを決定する。
【0049】
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0050】
[第2の実施の形態]
第1の実施の形態の光学素子評価方法では、透過光強度の計算値と透過光透過の測定値が一致(必要な精度以内に近接)するように、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定したが、透過光強度の測定値から位相差を求めて位相差の測定値とし、この位相差の測定値と位相差の計算値が一致(必要な精度以内に近接)するように、未知のパラメータ(位相差板の主屈折率nX、nY、nZと厚さd)を決定することもできる。
以下に、第2の実施の形態の光学素子評価方法を説明する。なお、第2の実施の形態の光学素子評価方法を実施する光学素子評価装置としては、図2に示されている評価装置を用いることができる。
【0051】
一軸性位相差板では、垂直入射時(入射角Θ=0°)に、透過光に発生する位相差(リタデーションに等しい)が重要である。一軸性位相差板の位相差(リタデーション)測定方法として、検光子等を回転させて透過光強度の極小値あるいは極大値を測定し、測定した極小値あるいは極大値から透過光の位相差を求める方法(例えば、セナレルモン法、)や、入射側に設けた光弾性変調器を用いて透過光強度に周期的変調を与え、透過光強度の変調成分から透過光の位相差を求める方法が知られている。これらの方法は、透過光強度の直接演算で透過光の位相差を求めるのではなく、透過光強度から透過光の位相差の情報を間接的に求めている。
二軸性位相差板では、透過光に発生する位相差は、[式20]で表されるように、形式上は、一軸性位相差板における垂直入射時の透過光の位相差と同形式で記述することができる。したがって、一軸性位相差板の位相差(リタデーション)測定方法を、二軸性位相差板における位相差の測定に用いることができる。位相差の測定値と[式15]〜[式17]を用いて計算される位相差が一致(必要な精度以内に近接)するように、主屈折率等の未知のパラメータを決定する光学素子評価方法は、透過光強度を直接使用しない、一軸性位相差板の位相差(リタデーション)測定方法を用いることができるので、便利である。また、変調を利用する方法は、高速に測定を行うことができるので、測定時間の短縮が要望される用途への適用に適している。
【0052】
一例として、回転検光子法を用いた光学素子評価方法を説明する。
図2に示されている光学素子評価装置において、偏光子30の透過軸方向31を、x軸から45°方向に設定し、検光子40(透過軸方向41)を、x軸に平行な回転軸回りに角速度Ωで回転させる。既知の位相差板60は挿入しない。時間t(検光子40の透過軸方向41=Ωt)での透過光強度Iは、[式26]で表される。
【数26】
[式26]
ここで、δは、透過光の位相差である。tsとtpは、位相差板10を透過した光22の電場ベクトルのs偏光成分Eoutsとp偏光成分Eoutpの大きさである。
【0053】
検出器50の出力信号をロックイン検出する方法等を用いることにより、[式26]の係数a、b、定数I0(全光量)を求めることができる。したがって、[式27]により、透過光22の位相差δを求めることができる。
【数27】
[式27]
【0054】
主屈折率nX、nY、nZと厚さdを適当に設定した時の透過光の位相差δは、[式17]と[式19]を用いて計算される、検光子40に入射する前の光の電場ベクトルのs偏光成分Etsとp偏光成分Etpの偏角と[式28]から計算することができる。
【数28】
[式28]
ここで、argは、偏角を表す。Re(u)とIm(u)は、それぞれuの実数部と虚数部を戻り値とする関数である。
【0055】
この位相差の計算値と位相差の測定値が一致(必要な精度以内に近接)するように、共役勾配法や準ニュートン法等を用いた最小二乗法等の逐次最適化手法を用いて、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を評価することができる。
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0056】
[第3の実施の形態]
第1の実施の形態および第2の実施の形態の光学素子評価方法では、位相差板の主屈折率nX、nY、nZと厚さdを求めたが、位相差板の主屈折率nX、nY、nZと厚さdの代わりに、垂直入射時(入射角Θ=0°)のリタデーション、厚さ方向のリタデーション、位相差板の主屈折率の一つ(nX、nY、nZのいずれか一つ)、厚さdを求めることもできる。
以下に、第3の実施の形態の光学素子評価方法を説明する。なお、第3の実施の形態の光学素子評価方法を実施する光学素子評価装置としては、図2に示されている光学素子評価装置を用いることができる。
【0057】
垂直入射時のリタデーションReと厚さ方向のリタデーションRthは、二軸性位相差板を特徴付ける物理量であり、[式29]で表される。
【数29】
[式29]
ここでは、屈折率主軸(X軸、Y軸、Z軸)のうちの1つの屈折率主軸(Z軸)が位相差板法線方向に平行であり、残りの2つの屈折率主軸(X軸、Y軸)が位相差板の表面に平行であると定義している。なお、垂直入射時のリタデーションReと厚さ方向のリタデーションRthそれぞれに対して、符号の取り方を逆に定義することもできるが、ここでは[式29]の適宜で説明する。
【0058】
[式29]を主屈折率nYとnZについて解くと、[式30]が得られる。
【数30】
[式30]
【0059】
[式30]は、(主屈折率nX,nY,nZ、厚さd)というパラメータの組と(主屈折率nX、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、厚さd)というパラメータの組は、どちらかが分かれば他方が求められることを示している。つまり、原理上は、どちらのパラメータの組を求めても違いはない。
【0060】
[式21]を、[式30]を用いて書き換えると、[式31]が得られる。
【数31】
[式31]
【0061】
[式21]と[式31]は、表現が異なるだけで同じ式である。この2つの式を、位相差板を評価する目的、つまり、位相差板の偏光特性を求めるという視点、あるいは、目的の偏光特性が得られるかどうかを判断するという視点で見直してみる。
[式21]をみると、位相差板で発生する位相差Γは、複屈折率(主屈折率の差)(より詳しくは、複屈折率と厚さdの積、厚さd、主屈折率nXの3つのパラメータ)でおおよそ決まることがわかる。一般的に、複屈折率は主屈折率に対して非常に小さい(主屈折率が1のオーダーであるのに対し、複屈折率は10−2〜10−4のオーダー)ので、主屈折率から複屈折率を計算する場合、複屈折率の有効桁数は、主屈折率の有効桁数より数桁小さくなる。逆に、主屈折率には、複屈折率や複屈折率から計算される位相差の有効桁数より数桁大きい有効桁数が必要となる。そのため、計算コストがかかる。
【0062】
また、逐次最適化手法を用いて未知のパラメータを決定する場合、目的関数(最小二乗法の場合、測定値と計算値の差の二乗)によって計算値と測定値の比較を行う。このため、測定値の有効桁数が、決定する(複数の)未知のパラメータの最大の有効桁数以上でないと、必要な有効桁数(精度)で未知のパラメータを決定することができない。なぜなら、目的関数の値の有効桁数は、未知のパラメータの最大の有効桁数以上になることはなく、また、測定値の有効桁数以上の精度で測定値と計算値が一致していると判断することは意味がないからである(例えば、有効桁数3桁の測定値1.00に対して、5桁の計算値1.0001と1.0002のどちらが近いかを判断することは意味がない)。つまり、逐次最適化手法を用いて主屈折率nX、nY、nZと厚さdを評価する場合、主屈折率に必要な有効桁数の測定値が必要となる。
【0063】
一方、[式31]は、与えたnX、Re、Rth、dの有効桁数と同程度の有効桁数で、位相差板で発生する位相差を計算することができることを示している。なぜなら、2つの変数の乗除算の結果の有効桁数は、有効桁数の小さい方の変数の有効桁数になり、また、加減算の結果の有効桁数は、最大で、整数部は大きい方、小数部は小さい方に合わせた時の有効桁数になり、また、[式31]の最上段の式において、[第1項の絶対値>第2項の絶対値>第3項の絶対値]が成り立つからである。[式31]の最上段の式の第1項は、Reと等しいので有効桁数も等しく、第2項以下も、各項はReと等しい有効桁数で与えることができる。第1項に第2項以下を加減算していく時は、上記不等式のため、最も大きい有効な位が0にならない限り有効桁数は変わらないので、計算される位相差の有効桁数は、与えたnX、Re、Rth、dの有効桁数と同程度となる。つまり、逐次最適化手法を用いてnX、nY、nZ、dを求めるより、nX、Re、Rth、dを求める方が、評価で必要な有効桁数が小さくてすむので、測定値に必要な有効桁数も小さくてすむ。このため、測定が容易になる。また、計算時間を短縮することができる。
なお、以上の説明では、主屈折率nXを基準として複屈折率を定義したが、他の主屈折率nYやnZを基準とすることもできる。
また、第3の実施の形態では、第1の実施の形態のように、透過光強度の計算値と測定値が一致するように未知パラメータを決定する方法や、第2の実施の形態のように、測定した透過光強度から位相差を求めて位相差の測定値とし、この位相差の測定値と[式15]〜[式17]を使用して計算した位相差が一致するように未知パラメータを決定する方法を用いることもできる。
【0064】
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0065】
本発明の光学素子評価方法を用いて評価対象(位相差板)を評価した実施例を説明する。各実施例では、図2に示されている光学素子評価装置を用いて評価を行った。
(実施例1)
光源20として、ハロゲンランプと、単色化用の、半値全幅が10nmであるレーザー用干渉フィルタ(中心波長546nm)により構成される光源を用いた。
偏光子30と検光子40として、樹脂製偏光フィルタをガラスで挟んだもの(消光比10000:1)を用いた。また、光の進行方向(z軸)に平行な軸を中心に偏光子30と検光子40を回転させる回転駆動機構を設けた。回転駆動機構として、ステッピングモータにより駆動される回転駆動機構を用いた。
試料10を支持する支持台として、アルミニウム製の板に、光が通過する直径2cmの孔を開けたものを、黒色塗料(つや消し)で塗装したものを用いた。そして、光の進行方向(z軸)に直角な回転軸11を中心に支持台(および支持台に支持されている評価対象10)を回転させるための回転駆動機構を設けた。また、光の進行方向(z軸)に平行な回転軸12を中心に試料10を回転させるための回転駆動機構を支持台に設けた。回転駆動機構として、ステッピングモータにより駆動される回転駆動機構を用いた。
既知の位相差板60として、波長546nm用の水晶製1/4波長板を用いた。また、光の進行方向(z軸)に平行な軸を中心に既知の位相差板60を回転させる回転駆動機構を設けた。回転駆動機構として、ステッピングモーにより駆動される回転駆動機構を用いた。
検出器50として、光ダイオードを用いた。検出器50の出力信号は、16ビットのA/Dコンバータを介してパソコンで読み出せるようにした。このパソコンは、各回転駆動機構の制御装置としても用いた。
試料10として、樹脂製の二軸性位相差板を、液晶セル用にガラス基板に貼付したものを用いた。
【0066】
試料10の評価に先立ち、光21が入射する表面の屈折率主軸方向を以下の方法で求めた。まず、偏光子30の透過軸方向31を、図2のx軸に対して45°方向に向け、検光子40の透過軸方向41を、図2のx軸に対して135°方向に向けた。
次に、検査対象10を、支持台に、その法線方向(位相差板法線方向)が光21の進行方向(z軸)に平行になるように設置した。そして、試料10を、回転軸12回りに15°づつ回転させながら検出器50で透過光強度Iを測定した。
測定した透過光強度Iを、[式32]でフィッティングして屈折率主軸方向ζを求めた。求めた屈折率主軸方向ζが[1.1°]であったので、試料10の回転軸12回りの回転角度に[−1.1°]のオフセットをかけるように、パソコンの設定を行った。
【数32】
[式32]
ここで、θは、支持台の、回転軸12回りの回転角度である。ζは、図2のx軸から見た、試料10を設置した時の、試料10の表面の屈折率主軸方向である。I0は、規格化定数である。gは、わずかな迷光や熱雑音の時間平均などの定常雑音を表している。
【0067】
試料10を、回転軸12回りに逆方向に[1.1°]回転させた。前記したように、パソコンには[−1.1°]のオフセットが設定されているので、この状態で、試料10の表面の屈折率主軸の一方(主屈折率nXに対応する屈折率主軸あるいは主屈折率nYに対応する屈折率主軸)が図2のx軸と平行になる。
(ステップ1)
(1a)x軸と、前述した試料10の表面の屈折率主軸の一方のなす角度が所定の角度−Φ1となるように、試料10を回転軸12回りに回転させる。これにより、試料10の表面の屈折率主軸の一方から見た入射面角度ΦがΦ1になる。この状態で、支持台を、回転軸11回りに角度Θ1回転させる。これにより、試料10の表面の法線に対する光の入射角ΘがΘ1となる。
偏光子30の透過軸方向31は、x軸に対して45°方向へ向けた。ただし、入射面角度Φが45°方向の時は、75°方向へ向けた。1/4波長板60は抜去した。
この入射面角度Φ1、入射角Θ1の状態で、検光子40の透過軸方向41をx軸方向に向けた時の透過光強度Iexpx(Φ1,Θ1)、検光子40の透過軸方向41をy軸方向に向けた時の透過光強度Iexpy(Φ1,Θ1)、検光子40の透過軸方向41をx軸に対して45°方向に向けた時の透過光強度Iexpxy(Φ1,Θ1)、この状態で、1/4波長板60を、遅相軸方向61をx軸方向に向けて挿入した時の透過光強度Iexpqxy(Φ1,Θ1)の4つの透過光強度を測定した。
(1b)入射角Θが、Θh(Θh;−25°,−20°,0°,20°,25°)となるように、支持台を回転軸11回りに回転させ(入射角Θの符号は、図2で試料10の上部分が右側に移動し、下部分が左側に移動する回転方向、すなわち、手前側から見て、時計回り方向を正とした)、各入射角において(ステップ1a)を繰り返した。
(ステップ1)により、透過光強度Iexpx(Φ1,Θh)、Iexpy(Φ1,Θh)、Iexpxy(Φ1,Θh)、Iexpqxy(Φ1,Θh)を測定した。
【0068】
(ステップ2)
入射面角度Φが、Φg(Φg;0°,15°,30°,45°,60°,75°,90°)となるように、回転軸12回りに試料10を回転させ、各入射面角度Φgにおいて(ステップ1)を繰り返した。
(ステップ1)と(ステップ2)により、透過光強度Iexpx(Φg,Θh)、Iexpy(Φg,Θh)、Iexpxy(Φg,Θh)、Iexpqxy(Φg,Θh)を測定した。
【0069】
(ステップ3)
(3a)主屈折率nX、nY、nZ厚さdの初期値として、nX=1.535、nY=1.530、nY=1.533、d=80μmを設定した。
(3b)最小化する目的関数Fとして、(ステップ1)と(ステップ2)で測定した透過光強度Iexpm(Φg,Θh)(m;x,y,xy,qxyのいずれか、g;1,2,…、h;1,2,…)と、[式15]〜[式19]を用いて計算した、測定した透過光強度Iexpm(Φg,Θh)と対応する透過光強度Icalm(Φg,Θh)の差の二乗を、m、Φg、Θhについて足し上げたものを計算する([式34])。計算では全光量という任意性があるので、測定値と計算値それぞれを、Iexpx(Φ,Θ)+Iexpy(Φ,Θ)とIxcal(Φ,Θ)+Icaly(Φ,Θ)で除している)、準ニュートン法を用いた最小二乗法により、(1)の初期値から目的関数Fを最小化する主屈折率nX、nY、nZを求めた。
【数33】
[式33]
【0070】
結果、nX=1.5332、nY=1.5310、nZ=1.5325、d=78.24μmが得られた。最小化にはマイクロソフト社のMicrosoft Offfice EXCEL2003(登録商標)の機能を利用したので、結果自体は15桁で表示されるが、適当な有効桁数で丸めている。(以下も同様である。)
【0071】
(実施例2)
実施例1で得た透過光強度の測定値Iexpm(Φg,Θh)(m;x,y,xy,qxyのいずれか、g;1,2,…、h;1,2,…)と計算値Icalm(Φg,Θh)から、[式34]により、透過光22の位相差の測定値δexpと計算値δcalを得た。[式34]中のqは、expかcalのいずれか。
【数34】
[式34]
ここで、k0=2π/λは、大気中での波数であり、位相差を波長単位で表すために1/k0を乗じている。
実施例1の(ステップ3b)の目的関数Fを、[式35]に置き換えて最小化した。
【数35】
[式35]
結果、nX=1.5333、nY=1.5311、nZ=1.5326、d=77.52μmが得られた。
【0072】
(実施例3)
実施例1の(ステップ3a)の初期値を、nX=1.5333、Re=170nm、Rth=−30nm、d=75μmに設定した。
実施例1の(ステップ3b)の目的関数Fを、[式35]に置き換え、実施例2で得た透過光22の位相差の測定値δexpと計算値δcalに対して目的関数Fを最小化する主屈折率の一つ(この場合、nX)、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、厚さdを求めた。
結果、nX=1.5333、Re=168.4nm、Rth=−30.8nm、d=77.78μmが得られた。
【0073】
本発明は、実施の形態で説明した構成に限定されず、種々の変更、追加、削除が可能である。
光学素子評価方法の構成は、実施の形態で説明した構成に限定されない。例えば、各手順の処理内容や各手順の処理順序は適宜変更可能である。
実効的屈折率nZ,1とnZ,2を用いて透過光強度や透過光の位相差を算出する方法は、実施の形態で説明した方法に限定されない。
光学素子評価装置の構成は、実施の形態で説明した構成に限定されない。例えば、各構成要素の構成や各構成要素の配置個所は適宜変更可能である。また、入射面角度Φおよび入射角Θを調整(変更)する構成は、実施の形態で説明した構成に限定されない。すなわち、入射面角度Φおよび入射角Θを調整できるように、評価対象(試料)が光源に対して相対的に回転可能であればよい。例えば、入射面角度Φを変更するために、光の進行方向(z軸)に平行な回転軸12を中心に評価対象(試料)10を回転させる回転機構を用いたが、光の進行方向(z軸)に平行な回転軸を中心に偏光子30を回転させる回転機構を用いることもできる。また、入射角Θを変更するために、光の進行方向(z軸)に垂直な回転軸11を中心に評価対象(試料)10を回転させる回転機構を用いたが、評価対象(試料)10の表面の法線(位相差板法線方向)に垂直な回転軸を中心に光源20、偏光子30、検光子40、検出器50、既知の位相差板60等を回転させる回転機構を用いることもできる。
【符号の説明】
【0074】
10 位相差板(検査対象,試料)
20 光源
21 光源から照射される光
22 位相差板を透過した光
30 偏光子
31 偏光子の透過軸方向
40 検光子
41 検光子の透過軸方向
50 検出器
60 既知の位相差板
61 既知の位相板の遅相軸方向
【技術分野】
【0001】
本発明は、光学素子、特に、液晶表示装置等に用いられる二軸性を有する光学素子を評価するのに好適な光学素子評価方法および光学素子評価装置に関する。
【背景技術】
【0002】
偏光光学系に用いられる位相差板は、位相差板中を伝播する2つの固有偏光に対して異なる位相を付与する(2つの固有偏光の間に位相差を発生させる)ことで、位相差板を透過した光の偏光状態を変化させる機能を有する。位相差板は、一般的には、板状あるいは膜状に形成される。
位相差板等の光学媒質中を伝播する光に付与される位相は、光が感じる屈折率と伝播距離の積で与えられる。この積は、長さの単位を有し、1波長が光の電場・磁場の振動の1周期に対応する。光が感じる屈折率は、誘電率テンソルの3つの固有値の正の平方根で与えられる3つの主屈折率と、光が光学媒質中を伝播する方向(波面法線方向)で決定される。誘電率テンソルの3つの固有値に対応する3つの直交する固有ベクトルの方向を主軸方向(「屈折率主軸方向」と呼ばれる)とし、径の長さが主屈折率に等しい楕円体は、「屈折率楕円体」と呼ばれる。光の進行方向(波面法線方向)を法線とする屈折率楕円体の断面は、一般に楕円形であり、その楕円形の長軸方向および短軸方向が、光の電束ベクトルの振動方向であり、また、長軸の長さおよび短軸の長さが、光が感じる屈折率となることがよく知られている。この長軸方向および短軸方向に電束ベクトルの振動方向を有する偏光は、光学媒質中を進行しても偏光状態が変わらない性質を有しており、「固有偏光」と呼ばれる。異方性媒質では、固有偏光は、一般的に2つ存在する。異方性媒質内の偏光状態は、位相を考慮した、固有偏光の重ね合わせで記述される。
【0003】
3つの主屈折率のうちの2つが等しく、残りの1つと異なる光学媒質は、「一軸性媒質」と呼ばれる。一軸性媒質からなる位相差板(以下、「一軸性位相差板」という)は、一般的に、位相差板の表面内に、それぞれの方向の主屈折率が異なる2つの屈折率主軸を有し、位相差板の表面の法線方向(以下、「位相差板法線方向」という)に残り1つの屈折率主軸を有している。一軸性位相差板としては、水晶を板状に加工したものが広く用いられているが、樹脂フィルムを延伸したものが、安価かつ大面積を要求される液晶表示用に用いられている。例えば、STN(Super−Twisted Nematic)液晶表示素子において、表示色を白黒に補正するために用いられ、また、反射型液晶表示素子や半透過型液晶表示素子において、反射光を変調する反射モード表示のために用いられている。
一方、3つの主屈折率の全てが異なる光学媒質は、「二軸性媒質」と呼ばれる。二軸性媒質としては、斜方晶系や三斜方晶系等の無機結晶が知られているが、二軸性媒質からなる位相差板はほとんど用いられていなかった。ところで、近年、IPS(In−Plane Switching)液晶表示素子やVA(Vertical Alignment)液晶表示素子において、視野角特性の改善のために、二軸性媒質からなる位相差板(以下、「二軸性位相差板」という)が用いられるようになり、その工業的需要が急速に拡大している。液晶表示素子用の二軸性位相差板としては、樹脂フィルムを二軸延伸したものが広く用いられている。
二軸性位相板の品質を管理する場合には、一軸性位相差板の品質を管理する場合と異なり、厚さ方向の主屈折率も評価する必要がある。すなわち、二軸性位相差板の3つの主屈折率の全て(あるいは、3つの主屈折率と厚さを組み合わせた値)を評価することができることが重要である。
しかしながら、樹脂フィルムからなる二軸性位相差板は、厚さが数十μmと薄い。このため、二軸性を有する無機結晶を評価する場合のように、適当な形状に切り、光の屈折を実際に見るという直接的な評価方法を用いることができない。
【0004】
特許文献1〜5には、二軸性を有する光学素子(以下、単に「光学素子」という)の主屈折率を評価する方法が開示されている。
特許文献1には、入射面(光の進行方向と光学素子の表面の法線に平行な平面)を光学素子の表面内の2つの屈折率主軸の一方に平行とし、光学素子の表面にs偏光(電場ベクトルが入射面に直交する方向に振動する直線偏光)を入射した時の透過率を、入射角を変えて測定し、入射角と透過率との関係式から前記2つの屈折率主軸の他方の屈折率主軸の主屈折率を求め、求めた2つの主屈折率と透過光の位相差から残りの主屈折率を求める方法が開示されている。
特許文献2には、一定の入射角(光の進行方向と光学素子の表面の法線のなす角度)で二軸性位相差板の表面に光を入射した状態での、光学素子および検光子を透過した透過光の透過光強度の最大値と最小値を、光学素子の表面の法線に平行な回転軸を中心に試料を回転させながら測定し、測定した複数の透過光強度の最大値と最小値を用いて光学素子の3つの主屈折率を求める方法が開示されている。
特許文献3には、偏光変調器からの測定光を入射角0°と入射角±θ°で光学素子の表面に入射し、光学素子および検光子を透過した透過光の透過光強度を測定し、測定した透過光強度を用いて光学素子の3つの主屈折率を求める方法が開示されている。
特許文献4には、入射角0°で試料の表面に光を入射し、直交ニコルの状態で、光学素子および検光子を透過した透過光の透過光強度が最大になる最大入射面角度を測定するとともに、最大入射面角度において、透過光強度が最小になる最小入射角を測定し、測定した最大入射面角度と最少入射角を用いて、光学素子の3つの主屈折率を求める方法が開示されている。
特許文献5には、所定の入射面角度および入射角における試料のJones行列要素を、偏光状態が異なる3つ以上の入射光を光学素子の表面に入射した時の、光学素子を透過した透過光の偏光状態から求める方法が開示されている。
また、特許文献6には、光学素子を伝播する光の偏光状態を計算する方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−302888号公報
【特許文献2】特開平1−213551号公報
【特許文献3】特開2005−3386号公報
【特許文献4】特開平1−121736号公報
【特許文献5】特開2006−243311号公報
【特許文献6】特開2002−318159号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1〜5に開示されている方法は、基本的に、屈折率楕円体を用いて解析を行っている。
しかしながら、特許文献1に開示されている方法は、光学素子中での光の進行方向を求めるために屈折角を計算しているが、2つの固有偏光に対する屈折角の平均値を用いている(近似を用いている)。実際には、特定の入射角で、光学素子の表面に斜めに入射した光が光学素子中を伝播する際、2つの固有偏光に対する屈折角は異なる(複屈折)。このため、特許文献1に開示されている方法では、光学素子(二軸性を有する光学素子)を正確に評価することができない。
特許文献2に開示されている計算式を用いてc−plateと呼ばれる位相差板を記述した場合、2つの固有偏光が感じる屈折率が等しく、位相差が発生しないことになる。しかしながら、c−plateの表面に、位相差板の表面の法線に対して斜めに光を入射した場合、c−plateを透過した透過光には位相差が発生する。したがって、特許文献2に開示されている方法では、二軸性位相差板を正しく評価することができない。
特許文献3に開示されている方法は、屈折率テンソル(屈折率楕円体を表す対称行列)を用いて光学素子を解析している。屈折率主軸の方向をそれぞれxyz座標系のx軸、y軸、z軸とした屈折率楕円体は、[式1]で表されるので、特許文献3の屈折率テンソルの成分は、この座標系では、[式2]で表される。ただし、特許文献3の図4のn1、n2、n3が右手系をなすとした。
【数1】
[式1]
【数2】
[式2]
この屈折率主軸を座標軸(xyz軸)としたxyz座標系で見た屈折率テンソルは、非対称成分が0となる対角行列を用いて表すことができる。任意の座標系で見たときの屈折率テンソルは、特許文献3に示されているように、屈折率テンソルに座標系変換を表す回転による変換則を適用することで得られる。
非対角項(n12、n13、n23)が0でない一般的な屈折率テンソルをZ軸周りに角度Ψ0回転させた時の屈折率テンソルは、[式3]で表される(上付き添字rotが回転を表す)。
【数3】
[式3]
これにより、特許文献3の[数2]の屈折率テンソルは、[式2]の屈折率テンソルをZ軸周りに回転させたものと同型であることが分かる。すなわち、特許文献3の[数2]の屈折率テンソルは、屈折率主軸([式1]のxyz座標系の座標軸)が特許文献3のXYZ座標系(実験室座標系)の座標軸である屈折率テンソルをZ軸周りに角度Ψ0回転させた時の屈折率テンソルを表している。
同様に、特許文献3の[数3]および[数4]の屈折率テンソルは、それぞれ[式2]の屈折率テンソルをZ軸回りに角度Ψ+およびΨ−回転させたものと同型である。
なお、非対角項(n12、n13、n23)が0でない一般的な屈折率テンソルをX軸回りに角度Ψ0回転させた時の屈折率テンソルは、[式4]で表される。
【数4】
[式4]
したがって、特許文献3に開示されている方法では、二軸性位相差板を正しく評価することができない。
特許文献4に開示されている方法は、平均屈折率を用いて屈折角を求めている(近似を用いている)。このため、特許文献4に開示されている方法では、光学素子(二軸性を有する光学素子)を正確に評価することができない。
特許文献5に開示されている方法は、所定の入射面角度および入射角に対して、個別にJones行列要素を求めている。このため、光学素子(二軸性を有する光学素子)の偏光特性をシミュレーションする場合、シミュレーションする視線方向(観測者が二軸性位相差板を見る方向で、透過光の進行方向に平行)全てにおいてJones行列要素を求める必要があり、効率的でない。
特許文献6には、光学素子中を伝播する光の偏光状態を計算する方法が開示されている。しかしながら、特許文献6には、光学素子(二軸性を有する光学素子)をどのように評価するかという評価方法が開示されていない。
本発明は、このような点に鑑みて創案されたものであり、二軸性を有する光学素子を正確に評価することができる光学素子評価技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の光学素子評価技術は、光学素子、特に、二軸性を有する光学素子、好適には樹脂フィルムからなる二軸性位相差板を評価する際に用いることができる。
【0008】
第1の発明は、光学素子評価方法に関する。
本発明の一つの光学素子評価方法は、二軸性を有する光学素子の、互いに直交する屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを評価する。なお、屈折率主軸のいずれをX軸、Y軸、Z軸とするかは任意であるが、樹脂フィルムからなる二軸性位相差板では、表面内の屈折率主軸がX軸、Y軸、厚さ方向の屈折率主軸がZ軸とされる。本発明の一つの光学素子評価方法は、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度が、光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、2つの固有偏光が光学素子中を伝播することにより発生する2つの固有偏光の間の位相差Γで決まることを利用して、光学素子の主屈折率nX、nY、nZと厚さdを評価している。実効的屈折率nZ,1、nZ,2は、以下の[式5]で表される。
【数5】
[式5]
ここで、Φは、光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面(光の進行方向と光学素子の表面の法線に平行な平面)のなす入射面角度である。また、Θは、光学素子の、光が入射する表面の法線(Z軸方向)と光の進行方向がなす入射角である。なお、実効的屈折率nZ,1、nZ,2に変えて、波数ベクトルのZ軸方向成分kZ,1=k0・nZ,1、kZ,2=k0・nZ,2を用いることもできる。k0=2π/λは、大気中での波数であり、λは、大気中での波長である(大気中の屈折率を1としている)。
入射面角度Φと入射角Θの組合せは、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せを用いる。好適には、少なくとも0°、45°、90°を含む入射面角度Φと複数の入射角Θの組合せが用いられる。
なお、透過光強度を測定する方法としては、適宜の方法を用いることができる。例えば、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度を測定する方法、単色の偏光を光学素子、位相差が既知である位相差板および検光子を透過させた透過光の透過光強度を測定する方法、これらの方法を組み合わせて測定する方法等を用いることができる。
本発明の一つの光学素子評価方法の一態様では、入射光強度の測定値と計算値に基づいて光学素子の主屈折率nX、nY、nZと厚さdを評価する。すなわち、入射面角度Φと入射角Θの組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)と、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dにより表される、複数の透過光強度Iexp(Φ,Θ)を測定した入射面角度Φと入射角Θの組合せに対する複数の透過光強度Ical(Φ,Θ)が一致するように、光学素子の主屈折率nX、nY、nZと厚さdを決定する。複数の透過光強度Iexp(Φ,Θ)と複数の透過光強度Ical(Φ,Θ)に基づいて光学素子の主屈折率nX、nY、nZと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
本発明の一つの光学素子評価方法の他の態様では、透過光の位相差の測定値と計算値に基づいて光学素子の主屈折率nX、nY、nZと厚さdを評価する。すなわち、入射面角度Φと入射角Θの複数の組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)を用いて、透過光の位相差δexpを、入射面角度Φと入射角Θの複数の組合せに対して算出する。また、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差δcalを、入射面角度Φと入射角Θの組合せに対して算出する。そして、測定した複数の透過光強度Iexp(Φ,Θ)を用いて算出した複数の透過光の位相差δexpと、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差δcalが一致するように、光学素子の主屈折率nX、nY、nZと厚さdを決定する。複数の透過光の位相差δexpと複数の透過光の位相差δcalに基づいて光学素子の主屈折率nX、nY、nZと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
【0009】
二軸性を有する光学素子では、主屈折率nX、nY、nZと厚さdを決定することと、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定することは、本質的に同じことである。
本発明の他の光学素子評価方法は、二軸性を有する光学素子の、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。本発明の他の光学素子評価方法は、単色の偏光を光学素子および検光子を透過させた透過光の透過光強度が、光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、2つの固有偏光が光学素子中を伝播することにより発生する2つの固有偏光の間の位相差Γで決まることを利用して、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価している。なお、実効的屈折率nZ,1、nZ,2に変えて、波数ベクトルのZ軸方向成分kZ,1=k0・nZ,1、kZ,2=k0・nZ,2を用いることもできる。k0=2π/λは、大気中での波数であり、λは、大気中での波長である(大気中の屈折率を1としている)。
入射面角度Φと入射角Θの組合せは、3つ以上の入射面角度Φと複数の入射角Θとの組合せを用いる。好適には、少なくとも0°、45°、90°を含む入射面角度Φと複数の入射角Θとの組合せが用いられる。
本発明の他の光学素子評価方法の一態様では、入射光強度の測定値と計算値に基づいて垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。すなわち、入射面角度Φと入射角Θの組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)と、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dにより表される、複数の透過光強度Iexp(Φ,Θ)を測定した入射面角度Φと入射角Θの組合せに対する複数の透過光強度Ical(Φ,Θ)が一致するように、光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する。複数の透過光強度Iexp(Φ,Θ)と複数の透過光強度Ical(Φ,Θ)に基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
本発明の他の光学素子評価方法の他の態様では、透過光の位相差の測定値と計算値に基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを評価する。すなわち、入射面角度Φと入射角Θの複数の組合せに対して測定した複数の透過光強度Iexp(Φ,Θ)を用いて、透過光の位相差δexpを、入射面角度Φと入射角Θの複数の組合せに対して算出する。また、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差δcalを、入射面角度Φと入射角Θの組合せに対して算出する。そして、測定した複数の透過光強度Iexp(Φ,Θ)を用いて算出した複数の透過光の位相差δexpと、2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差δcalが一致するよう、光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する。複数の透過光の位相差δexpと複数の透過光の位相差δcalに基づいて光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちのひとつと厚さdを決定する方法としては、例えば、最小二乗法を用いることができる。
【0010】
第2の発明は、前記した光学素子評価方法を実施する光学素子評価装置に関する。
本発明の光学素子評価装置は、単色光を照射する光源、偏光子、支持台、検光子、検出装置、解析装置を備えている。
光源は、単色光を照射することができればよく、レーザー等の単色光源や、白色光源と単色化機構(例えば、分光器)を有する光源を用いることができる。なお、単色光は、厳密に単一の波長である必要はなく、主屈折率の波長分散を無視することできる程度の波長幅の光であればよい。偏光子は、単色光源から照射された単色光の中から透過軸方向の直線偏光を透過する。支持台は、偏光子を透過した光が光学素子の表面に入射するように光学素子を支持する。検光子は、光学素子を透過した光の中から、透過軸方向の直線偏光を透過する。検出装置は、光学素子と検光子を透過した透過光の透過光強度を検出する。解析装置は、検出装置で検出した透過光強度を入力する。
また、本発明の光学素子評価装置は、支持台に支持される光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、光学素子の、光が入射する表面の法線(Z軸方向)と光の進行方向のなす入射角Θを調整可能に構成されている。すなわち、支持台に支持される光学素子が、光源からの光の進行方向に垂直な回転軸および当該回転軸に垂直な回転軸の回りに、光源に対して相対的に回転可能に構成されている。例えば、光学素子を、光の進行方向に垂直な回転軸の回りに回転させる回転機構と、光の進行方向に垂直な回転軸に垂直な回転軸の回りに回転させる回転機構が設けられる。あるいは、光の進行方向に垂直な回転軸に垂直な回転軸の回りに偏光子を回転させる回転機構が設けられる。あるいは、光学素子の、光が入射する表面の法線に垂直な回転軸の回りに光源、偏光子、検光子、検出装置等を回転させる回転機構が設けられる。
そして、解析装置は、請求項1〜7のいずれかに記載の方法を用いて光学素子を評価する。
なお、支持台に支持される光学素子と検光子の間に、位相差が既知である位相差板を配置してもよい。また、偏光子、検光子、位相差が既知である位相差板を回転させる回転機構を用いてもよい。
【発明の効果】
【0011】
本発明の光学素子評価方法および光学素子評価装置を用いることにより、異なる3つの主屈折率nX、nY、nZと厚さdを有する光学素子(二軸性を有する光学素子)を正確に評価することができる。
【図面の簡単な説明】
【0012】
【図1】二軸性位相差板中の2つの固有偏光の光路の模式図である。
【図2】評価装置の一実施の形態の模式図である。
【発明を実施するための形態】
【0013】
本発明の光学素子評価方法および光学素子評価装置の実施の形態を説明する。以下では、二軸性位相差板を評価する場合について説明する。また、評価対象である二軸性位相差板は、二軸性位相差板の表面内および二軸性位相差板の表面の法線方向(位相差板法線方向)に屈折率主軸(主屈折率nX、nY、nZ)を有するものとする。勿論、本発明の光学素子評価方法および光学素子評価装置は、二軸性位相差板に限定されず、二軸性を有する光学素子を評価する際に用いることができる。
なお、光学媒質中を伝播する光に付与される位相差(Phase Difference)は、光学遅延(Optical retardation)とも呼ばれ、単にリタデーションと略されることもある。一方、光学媒質の主屈折率の差と光学媒質の厚さの積は、表面内に屈折率主軸を有する光学媒質に対し、表面の法線に平行に光を入射した場合に発生する位相差(光学遅延)に等しいことから、この積もリタデーションと呼ばれている。このリタデーションは、位相差(光学遅延)を表すリタデーションと混同し易いが、斜め入射などの一般的な状況で発生する位相差(光学遅延)とは異なる。本明細書では、光学媒質中を伝播する光に付与される位相差(光学遅延)を「位相差」と呼び、光学媒質の主屈折率の差と光学媒質の厚さの積を「リタデーション」と呼ぶ。
【0014】
[第1の実施の形態]
まず、二軸性位相差板中を光が伝播する際の動作を説明する。なお、以下では、「二軸性位相差板」を、単に「位相差板」という。位相差板は、位相差板の表面内および位相差板法線方向(光が入射される表面の法線方向)に屈折率主軸を有している
ここで、XYZ座標系は、位相差板の3つの直交する屈折率主軸の方向(屈折率主軸方向)を座標軸(X軸、Y軸、Z軸)とする座標系(「主軸座標系」という)であり、Z軸を位相差板法線方向として定義する。
【0015】
大気中や位相差板中を伝播する光は、一様(等方という意味ではなく、並進対称性があるという意味である)な光学媒質中でのMaxwell方程式の解である平面波で表される。具体的には、電場ベクトルE(t,r)と磁場ベクトルH(t,r)が[式6]で与えられる平面波で表される。
【数6】
[式6]
ここで、E0とH0は、それぞれ電場と磁場の振動方向と大きさを表すベクトル(以下、単に「電場ベクトル」および「磁場ベクトル」という)である。kは、波面法線ベクトルである。tは、観測する時間である。rは、観測する位置を表すベクトルである。ωは、角周波数である。iは、虚数単位である。|k|=2πn/λは、波数と呼ばれる。nは、光学媒質の屈折率であり、λは、大気中での光の波長(大気の屈折率を「1」とする)であり、πは、円周率である。[式6]の右辺の括弧内のk・r−ω・tは、光の位相と呼ばれる量である(位相を複素数の偏角で表す複素数表示を用いている)。
位相差板中を伝播する2つの固有偏光では、波面法線ベクトルk(屈折率n)が異なるため、伝播により付与される位相差が異なる。ωtは、偏光状態に関係なく共通なので、2つの固有偏光間の位相差による偏光状態の変化を考察する際は無視することができる。
【0016】
位相差板10中の2つの固有偏光1、2の光路の模式図を図1に示す。L点から入射した光の固有偏光1の成分は、屈折角Θr,1で伝播し、N点から出射するものとする。同様に、M点から入射した光の固有偏光2の成分は、屈折角Θr,2で伝播し、N点から出射するものとする。線分LNと線分MNは、それぞれ固有偏光1と2の波面法線ベクトルの方向を示す。L点から線分MNに引いた垂線と線分MNとの交点をP、N点から位相差板10の位相差板法線方向に沿って伸ばした線と入射側の表面との交点をQとする。また、2つの固有偏光1および2が感じる屈折率を、それぞれn1’およびn2’とする。
固有偏光2の波面法線ベクトルは、線分PNと平行であり、線分PLと直交する。つまり、線分PLは、固有偏光2の等位相面(波面)であり、P点での固有偏光2の位相とL点での固有偏光2(図示していない)の位相は等しい。また、L点で、位相差板10の外部と内部の光の位相は連続しているので、L点での固有偏光1の位相とL点での固有偏光2の位相は等しい。よって、L点とP点は、固有偏光1と2の間に発生する位相差を考えるときの基準となる。
【0017】
固有偏光1がLN=d/cosΘr,1を伝播すると、固有偏光1の位相は、[式7]で表される△1進む(位相を波長単位で表している)。
【数7】
[式7]
ここで、dは、位相差板10の厚さである。
【0018】
次に、PNを伝播する固有偏光2の位相を考える。
ここで、MQ=d・tanΘr,2、LQ=d・tanΘr,1であるから、PN=MN−MP=d/cosΘr,2−d・sinΘr,2(tanΘr,2−tanΘr,1)である。
よって、固有偏光2がPNを伝播すると、固有偏光2の位相は、[式8]で表される△2進む。
【数8】
[式8]
【0019】
Θを位相差板10の表面に入射する光の入射角(光の進行方向と位相差板法線方向(Z軸)とのなす角度)、Φを光の進行方向の方位角(入射面角度)(光の進行方向の位相差板10の表面への射影と位相差板10の表面の基準軸(この場合はX軸)とのなす角度)とすると、固有偏光j(=1または2)の波面法線ベクトルkjは、[式9]で表される。
【数9】
[式9]
2つの固有偏光jが感じる屈折率nj’と屈折率Θr,jは、[式10]で表される。
【数10】
[式10]
ここで、j(=1または2)は、固有偏光を区別する添字である。k0=2π/λは、大気中での波数(大気の屈折率は「1」としている)である。kZ,jは、固有偏光jの波面法線ベクトルkjのZ軸方向成分である。kX、kYは、波面法線ベクトルkjのX軸方向成分、Y軸方向成分である。
【0020】
位相差板10中を伝播することで固有偏光jに付与される位相△jを表す[式7]および[式8]に[式10]を代入すると、[式11]が得られる。
【数11】
[式11]
[式11]の右辺第2項は、固有偏光1と2で共通であり、偏光状態に影響を与えないので無視することができる。この共通項は、位相差板10の表面に対する波面法線ベクトルの接線成分に由来する位相である。したがって、位相差板10中を伝播することで固有偏光jに付与される位相△jは、[式12]で表すことができる。
【数12】
[式12]
したがって、固有偏光jの波面法線ベクトルkjのZ軸方向(位相差板法線方向)成分kZ,jがわかれば、位相差板10を透過することで固有偏光jに付与される位相△jを求めることができる。
nZ,j=kZ,j/k0とすると、形式上は、厚さd、屈折率nZ,jを有する光学媒質を光が透過した場合と同形式で記述することができる。本発明では、nZ,jを「実効的屈折率」という(実際に、固有偏光jが感じる屈折率とは異なる)。
【0021】
なお、[式10]を用いれば、固有偏光jが感じる屈折率nj’や屈折角ΘZ,jを求めることもできる。しかしながら、本実施の形態では、屈折率nj’や屈折角ΘZ,jを求める必要がない。また、従来技術のように、屈折角を求めるために、屈折率や屈折角の平均を用いるといった近似を採用する必要もない。
【0022】
次に、波面法線ベクトルkのZ軸方向成分kZを求める。光の周波数では磁気双極子が応答しないため、比透磁率は1で等方的であるする。また、非伝導性であるとして、Maxwell方程式から磁場ベクトルH0を消去すると、[式13]が得られる。
【数13】
[式13]
ここで、μoは、透磁率であり、εは、誘電率テンソルである。また、×はベクトル同士の外積演算を表す記号である。
【0023】
εの主軸座標系(屈折率主軸がXYZ座標系のX軸、Y軸、Z軸と一致)で[式13]を書き下ろすと、[式14]が得られる。
【数14】
[式14]
ここで、nX、nY、nZは、各軸方向の主屈折率である。kX、kY、kZは、波面法線ベクトルkの各軸方向の成分である。EX、EY、EZは、電場ベクトルE0の各軸方向の成分である。
[式14]の導出には、真空の誘電率ε0=1/(μ0・c02)の関係と主軸XYZ座標系である(屈折率主軸がXYZ座標系のX軸、Y軸、Z軸と一致している)こと(εab=ε0・εa・δab=ε0・na2・δabと書けること)を用いた。なお、aとbは、X、YまたはZのいずれかであり、δabは、クロネッカーのδ関数であり、c0は、真空中の光速である。
【0024】
入射面とXZ面のなす角度がΦである場合、kX=k0・sinΘ・cosΦ、kY=k0・sinΘ・sinΦである。[式14]が(EX、EY、EZ)t(上付き添字tは転置行列を表す)に対して非自明な解を持つためには、左辺の3×3の行列式が0となることが必要十分条件である。この方程式を解くと、[式15]で表される、2つの固有偏光j(=1または2)に対応する2つの正のkZ,jの解が得られる。
【数15】
[式15]
【0025】
よって、2つの固有偏光j(=1または2)に対する実効的屈折率nZ,j=kZ,j/k0は、[式16]で与えられる。
【数16】
[式16]
【0026】
[式12]と[式16]により、位相差板10中を伝播する2つの固有偏光j(=1または2)に付与される位相△jを算出することができる。
[式16](あるいは[式15])は、Maxwell方程式から直接導いており、また、透磁率の等方性と非伝導性という広く知られている(妥当性の高い)仮定以外の仮定を用いていない。このため、位相差板10中を伝播する2つの固有偏光j(=1または2)に付与される位相△jを正確に求めることができる。
【0027】
任意の偏光状態の光を位相差板の表面に入射した時、位相差板を透過した透過光の偏光状態は、よく知られている方法、例えば、拡散Jones行列法や4×4行列法等を用いて計算することができる。また、位相差板を透過した透過光の透過光強度も計算することができる。求められる精度と計算時間等から、適宜の計算方法を選択すればよい。
例として、拡張Jones行列法を用いて計算する方法を説明する。入射偏光の電場ベクトルのs偏光(入射面に直交する方向に振動する直線偏光)成分をEins、p偏光(入射面に平行な方向に振動する直線偏光)成分をEinpとし、入射光の電場ベクトルを(Eins,Einp)tと表す。同様に、位相差板を透過した透過光の電場ベクトルのs偏光成分をEouts、p偏光成分をEoutpとし、透過光の電場ベクトルを(Eouts,Eoutp)tと表す。入射光の電場ベクトルと透過光の電場ベクトルは、[式17]の関係にある。
【数17】
[式17]
ここで、Jは、拡張Jones行列と呼ばれる行列である。
【0028】
また、Pは、伝播行列と呼ばれる行列であり、[式18]で表される。伝播行列Pは、固有偏光1と2が位相差板10中を伝播する際に、各固有偏光に異なる位相が付与されることを表す行列である。伝播行列Pの値は、主屈折率nX、nY、nZ、入射光の入射面角度Φおよび入射角Θ、[式16]を用いて算出したnZ,1とnZ,2(あるいは[式15]を用いて算出したkZ,1とkZ,2)と、位相差板10の厚さdとにより求めることができる。
【数18】
[式18]
ここで、Γ=(nZ,2−nZ,1)dは、位相差板10で固有偏光1と2の間に発生する位相差(「位相差板で発生する位相差」という)である。行列に乗算される、固有偏光1と2に共通に付与される位相差は、偏光状態に影響を与えないので無視することができる。したがって、伝播行列Pは、[式18]の最終段の式で表すことができる。
【0029】
DinとDoutは、ダイナミカル行列と呼ばれ、位相差板10外部の光のs偏光成分とp偏光成分が、位相差板10内部の固有偏光1および2とどの程度の割合で交じり合うかを表す(各偏光成分間の透過率を成分とした)行列である。具体的な式は、非常に複雑であるためここでは示さない。詳しくは、「Optics of Liquid Crystal Displays」(8.1節,306〜343頁,Pochi Yeh&Claire Gu著,John Wiley&Sons,Inc.)を参照。
[式17]と[式18]は、DinとDoutの具体的な式に無関係に、透過光の電場ベクトル(Eouts,Eoutp)tが、位相差板10で発生する位相差Γをexp(ik0Γd/2)およびexp(−ik0・Γ・d/2)形で)含む項の線形結合で表されることを示す。
【0030】
以上のように、位相差板10の主屈折率nX、nY、nZ、位相差板10の厚さd、入射面角度Φおよび入射角Θから、透過光の電場ベクトル(Eouts,Eoutp)tを計算することができる。このことは、位相差板10の主屈折率nX、nY、nZと位相差板10の厚さdから、任意の入射面角度Φおよび入射角Θにおける、位相差板10を透過した透過光の偏光状態を計算することができることを示している。
【0031】
以上は、位相差板10中の光の伝播、位相差板10中を伝播することで固有偏光1と2に付与される位相、位相差板10を透過した透過光の偏光状態に関する説明である。次に、以上の説明をもとに、本実施の形態の光学素子評価方法を説明する。
位相差板(評価対象)を透過した透過光の強度(透過光強度)Iは、計算で求めた透過光の電場ベクトル(Eouts,Eoutp)tから、[式19]を用いて計算することができる。透過光強度Iとしては、例えば、位相差板および検光子を透過して受光器で受光された透過光の透過光強度、あるいは、位相差板と、任意に挿入された既知の位相差板および検光子を透過して受光器で受光された透過光の透過光強度を用いることができる。
【数19】
[式19]
ここで、φは、検光子40の透過軸方向41である。Wは、評価対象10と検光子40の間に任意に挿入された既知の位相差板60のJones行列である。Etは、検光子40に入射する前の光の電場ベクトルである。αは、任意に挿入された既知の位相差板60の遅相軸方向であり、τは既知の位相差板60の位相差(角度単位)である。既知の位相差板60が挿入されない場合には、τ=0に設定することで、Wは、単位行列(対角成分が「1」、非対角成分が「0」の行列)となる。[式19]は、既知の位相差板60を1枚挿入する場合を想定しているが、既知の位相差板60を複数枚挿入する場合は、各位相差板のJones行列を乗じればよい。
【0032】
位相差板の実効的屈折率nZ,1とnZ,2を求める[式16]あるいはkZ,1とkZ,2を求める[式15]は、Maxwell方程式から直接導いており、また、透磁率の等方性と非伝導性という広く知られている(妥当性の高い)仮定以外の仮定を用いていない。このため、透過光強度Iを正確に計算することができる。
【0033】
位相差板(評価対象)を透過した透過光の電場ベクトル(Eouts,Eoutp)が、位相差板で発生する位相差Γを含む項の線形結合で表されているので、位相差板を透過した透過光の透過光強度Iも、位相差板で発生する位相差Γに依存する形で与えられる。
位相差板で発生する位相差Γは、[式20]で与えられる。なお、符号を逆とした定義もできるが、本実施の形態では、[式20]の定義を使用している。形式上は、一軸性位相差板の位相差板法線方向に平行に光を入射した時(垂直入射時)の位相差と同形式、つまり、屈折率の差と厚さの積で記述することができる。
【数20】
[式20]
【0034】
[式20]をsinΘでマクローリン展開すると、[式21]が得られる。
【数21】
[式21]
ここで、△YX=nY−nX、△ZX=nZ−nXは、いわゆる複屈折率であり、微小量なのでそれぞれ2次項までとっている。光を評価対象の表面に入射する一般的な評価方法では、入射角Θを大きくとると、光の照射領域が広くなり、その領域内での評価対象の厚さの変化の影響を受ける可能性が高くなる。そのため、入射角Θは、あまり大きくとらない方が好ましい。よって、入射角Θのより高次の項の影響は無視する。
【0035】
主屈折率nX、nY、nXと厚さdが未知である場合、未知なパラメータは、nX、nY[=nX+△YX]、nZ[=nX+△ZX]、dの4つである。これらの4つのパラメータを決定するためには、独立な測定値が4つ以上必要である。[式21]では、定数項(第1項)の係数、sin2Θの項(第2項)の係数、sin4Θの項(第3項)の係数を求めることができる。
[式21]では、sin2Θの項の係数は、Φに対して異なる依存性を持つ2つの量(a1、a2)を有するので、最低、相異なる2つの入射面角度Φで透過光強度を測定すれば、[式21]の係数a1とa2を求めることができる。また、sin2Θの項については、異なる入射面角度Φでの透過光強度の測定を追加しても、これ以上の情報は得られない。すなわち、sin2Θの項までには、独立な量は3つしかない。したがって、sin4Θの項の係数の3つの量(b1、b2、b3)のうち最低1つを決めないと、評価対象の評価に必要な4つの独立な測定値は得られない。
【0036】
Φ=0°とΦ=90°での測定で得られるsin4Θの項の係数をそれぞれc0、c90とすれば、原理上は、[式22]から、b2と(b1−b3)が得られる。
【数22】
[式22]
【0037】
しかしながら、sin4Θの項はsin2Θの項に比べて小さいので、sin4Θの項の係数の測定精度は高くない。[式21]を見ると、sin4Θの項の係数は、cos2Φの他にcos4Φを含むことがわかる。そこで、cos4Φに対する依存性を利用する。つまり、相異なる3つ以上の入射面角度Φで透過光強度の測定を行うことで、b1、b2、b3をそれぞれ求めるようにする。
【0038】
相異なる入射面角度Φ[=α,β,γ]での測定で得られるsin4Θの項の係数をそれぞれcα、cβ、cγとすれば、[式23]から、b1、b2、b3が得られる。
【数23】
[式23]
このことにより、未知のパラメータを決める際の拘束条件が、上記の2つの入射面角度Φ(Φ=0°とΦ=90°)での測定の場合より1つ増やすことができる。また、これ以上の情報がないことも、[式21]からわかる。つまり、測定精度の高くないsin4Θの項の係数を利用せざるを得ない位相差板評価に対して、4つの未知なパラメータ(主屈折率3つと厚さ)に関する最大限の情報を引き出すためには、相異なる3つ以上の入射面角度Φで、入射角Θを変えながら、位相差板で発生する位相差が影響を与える物理量を測定する必要がある。それにより、位相差板の主屈折率nX、nY、nZと厚さdを精度よく評価することができる。
ただし、位相差(評価対象で発生した位相差または透過光の位相差)は直接測定することができないので、評価対象に入射した光の状態の位相差による変化を、検光子を介した透過光強度の変化として測定する。透過光強度は、未知のパラメータに適当な値を仮定すれば[式15]〜[式19]を用いて計算することができる。したがって、共役勾配法や準ニュートン法を用いた最小二乗法等の逐次最適化手法を用いて、透過光強度の計算値と測定値が一致(必要な精度以内に近接)するよう、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定することができる。
【0039】
透過光強度と透過光の偏光状態、位相差板で付与される位相、位相差板で発生する位相差、それらの入射角および入射面角度依存性は、[式15]〜[式21]によって一連に関係付けられている。したがって、透過光強度の計算値と透過光強度の測定値が一致(必要な精度以内に近接)するように、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定することと、位相差板で発生する位相差の入射角および入射面角度依存性を表す係数の計算値と測定値が一致(必要な精度内に近接)するように、主屈折率nX、nY、nZと厚さdという未知のパラメータを決定することは、本質的に同じことである。
【0040】
3つ以上の入射面角度Φが必要であるということは、入射面と位相差板の面内の屈折率主軸が平行な場合以外の入射面角度Φが最低1つ必要であることを示している。本実施の形態の光学素子評価方法では、位相差板の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、かつ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度Φで透過光強度を測定している。これにより、位相差板の主屈折率nX、nY、nZと厚さdを正確に評価することができる。
また、一般的に、主屈折率は、波長に依存する(「波長分散」と呼ばれる)性質を有する。このため、波長が異なる複数の光を用いる評価方法では、波長域が広い場合に正確に測定することが困難である。これに対し、本実施の形態の光学素子評価方法は、単一の波長の光(「単色光」と呼ばれる)を用いて評価することができるので、主屈折率の波長分散に伴う問題を考慮する必要がない。したがって、レーザー光や白色光を分光器や干渉フィルタ等で分光した、実用上単色光とみなせる光(波長分散が無視できるほど波長域の狭い光)を用いることで、正確に評価することができる。
【0041】
位相差板で発生する位相差Γの入射角および入射面角度依存性を表す、[式20]のsin4Θの項の係数内のb1等の測定精度について考える。[式23]のように、あるパラメータから別のパラメータを計算により求める場合、求めるパラメータの精度は、誤差伝播の法則により推測することができる。すなわち、求めるパラメータFと既知のnP個のパラメータの組Px(x=1,2,…,nP)が関数F=f(P1,P2,…,PnP)の関係で結ばれている場合、パラメータFの不偏分散(標準偏差の二乗)σF2は、Pxの不偏分散σPx2を用いて、[式24]により表される。
【数24】
[式24]
ここで、2番目の等号は、Pxの分散σPx2が全て等しくσである時に成立する。
【0042】
簡単のため、相異なる入射面角度Φ[=α,β,γ]で求めた、[式20]のsin4Θの項の係数cα、cβ、cγが、各入射面角度において共通に標準偏差σで求められたとすると。[式23]、[式24]から、係数b1、b2、b3の標準偏差σb1、σb2、σb3を最小にするα、β、γを求めると、α、β、γは、0°、45°、90°のいずれかという条件が得られる。なお、α、β、γは、互いに異なるように選ぶものとする。例えば、α=0°、β=45°、γ=90°とする。この時のσb1、σb2、σb3、は、[式25]で表される。
【数25】
[式25]
【0043】
以上のように、入射面角度Φを変えることによって、[式20]のsin4Θの項の係数内のb1等の測定精度が変化する。入射面角度Φには、この係数の測定精度からみた最適な組合せがある。したがって、位相差板の主屈折率nX、nY、nZと厚さdという未知パラメータをより正確に評価するためには、0°、45°、90°の3つを含む3つ以上の入射面角度Φで測定を行うことが望ましい。
【0044】
本実施の形態の光学素子評価方法を実施する光学素子評価装置を説明する。図2に、光学素子評価装置の一実施の形態の模式図を示す。なお、xyz座標系は、互いに直交する座標軸(x軸、y軸、z軸)を有する測定座標系であり、z軸を光の進行方向として定義する。
図2に示されている光学素子評価装置は、光源20、偏光子30、検光子40、検出器50を有している。なお、図2では、光源20、偏光子30、位相差板(検査対象)10、既知の位相差板60、検光子40および検出器50は、z軸に沿って順に配置されている。
光源20は、単一の波長の光(単色光)を照射する。なお、光源20から照射される光は、厳密に単一の波長である必要はなく、主屈折率の波長分散を無視することできる程度の波長幅の光(実用上単色光とみなせる光)であればよい。光源20としては、単色光を照射する単色光源や、白色光を照射する白色光源と分光器等の単色化機構を有する光源を用いることができる。例えば、単色光源であるレーザーを用いることにより、半値全幅が1nm以下である光を得ることができる。また、白色光源(例えば、ハロゲンランプ)と分光器を用いることにより、半値全幅が1〜5nm程度の光を得ることができる。また、白色光源(例えば、ハロゲンランプ)とレーザー用の干渉フィルタを用いることにより、半値全幅が10nm程度の光を容易に得ることができる。光源20から照射された光21は、z軸に平行に進行する。
位相差板(検査対象)10は、光21の進行方向(z軸)に直角な方向(y軸)に平行な回転軸11を中心に回転可能であるとともに、光21の進行方向(z軸)に平行な回転軸12を中心に回転可能に設置される。例えば、回転軸12を中心に位相差板10を回転させる回転機構を支持台に取り付け、回転軸11を中心に支持台(位相差板20)を回転させる回転機構を設ける。なお、光21が入射する表面に平行な屈折率主軸の主屈折率をnX、nY、光21が入射する表面の法線方向(位相差板法線方向)に平行な屈折率主軸の主屈折率をnZとする。
偏光子30および検光子40としては、例えば、グランプムソンプリズムのような消光比の高い偏光プリズムが用いられる。また、樹脂製の偏光膜を有する偏光フィルタを用いることもできる。この場合、消光比が少し低下するが、[10000:1]程度の消光比が得られるため、実用上は十分使用することができる。なお、光21の進行方向(z軸)に平行な回転軸を中心に偏光子30や検光子40を回転させる回転機構や回転角度を検出する回転角度検出器を用いるのが好ましい。
検出器50は、受光した光の強度を電気信号に変換して出力する。検出器50としては、光ダイオードや光電子増倍管等が用いられる。検出器50の出力信号は、検出器50で受光する光の強度に対して線形に変化するのが好ましいが、非線形であってもよい。非線形の場合には、出力信号と光の強度との対応関係を示す対応表や検量線等を用いて、出力信号から光の強度を判別する。
既知の位相差板60としては、水晶あるいは樹脂製の波長板を使用することができる。位相差板60は、検査対象10と検光子40の間に挿入される場合と挿入されない場合があるため、位相差板60を挿入・抜去する挿抜機構を用いるのが好ましい。なお、位相差板60の遅相軸方向61が検光子40の透過軸方向41と平行あるいは直交している状態は、偏光光学的には、位相差板60が検査対象10と検光子40の間に挿入されている状態あるいは抜去されている状態と等価である。したがって、挿抜機構の変わりに、位相差板60を、光21の進行方向(z軸)に平行な回転軸を中心に回転させる回転機構を用いることができる。
また、図示はしていないが、検出器50の出力信号を解析する、パソコン等の解析装置が設けられている。解析装置は、通信回線(有線あるいは無線)を介して検出器40の出力信号を入力する。勿論、検出器50の出力信号を携帯可能な記憶媒体に記憶し、記憶媒体から検出器40の出力信号を入力してもよい。
前記した検査対象10、検光子30、偏光子40、既知の位相差板60を回転させる回転機構としては、手動で回転させる回転機構、あるいは、制御装置によって制御されるステッピングモータ等の駆動装置で回転させる回転機構を用いることができる。なお、回転角度を検出する回転角度検出器を用いるのが好ましい。また、解析装置が、回転機構を制御する制御装置を兼用してもよい。
【0045】
次に、第1の実施の形態の光学素子評価方法を、図2に示した光学素子評価装置を用いて実行する手順を説明する。なお、事前に、光21が入射する位相差板10の表面の法線方向(位相差板法線方向)がz軸と平行であり(入射角Θ=0°)、光21が入射する位相差板10の表面に平行な屈折率主軸の一方(本実施の形態では、主屈折率nXに対応する屈折率主軸とする)がx軸と平行(光の入射面角度Φ=0°)に設定されているものとする。
【0046】
(ステップ1)
(1a)位相差板10を回転軸12回りに回転させ、x軸と位相差板10の表面の屈折率主軸の一方(主屈折率nXに対応する屈折率主軸)のなす角度を−Φ1に設定する。これにより、位相差板10の表面の屈折率主軸の一方から見た入射面角度ΦがΦ1に設定される。この状態で、位相差板10を回転軸11回りに回転させ、位相差板法線方向に対する光21の入射角ΘをΘ1に設定する。そして、透過光強度I(Φ1,Θ1)を測定(検出)する。
検光子40の透過軸方向41は任意であるが、直交する2方向を含む複数の透過軸方向について、それぞれ透過光強度を測定することが望ましい。また、任意で、位相差が既知である位相差板60を、その透過軸方向61を任意の方向に向けて、位相差板10と検光子40の間に挿入してもよい。例えば、検光子40の透過軸方向41をx軸方向に向けた時の透過光強度、検光子40の透過軸方向41をy軸方向に向けた時の透過光強度、検光子40の透過軸方向41をx軸から45°方向に向けたときの透過光強度、検光子40の透過軸方向41を45°方向に向けた状態で、1/4波長板(光の波長の1/4の位相差を持つ位相差板)60を、遅相軸方向61をx軸方向に向けて挿入した時の透過光強度から、偏光状態を示すストークスパラメータを求めることができる。
(1b)位相差板10を回転軸11回りに回転させて、入射角Θを異なる複数の入射角Θh(h=1,2,…)に設定する。そして、各入射角Θhに対して(ステップ1a)を繰り返す。
(ステップ1)により、入射面角度Φ1と複数の入射角Θh(h=1,2,…)の組み合わせに対して、透過光強度Iexp(Φ1,Θh)を測定する。なお、入射角Θh(h=1,2,…)には、0°(位相差板法線方向(z軸)に平行)が含まれているのが好ましい。
【0047】
(ステップ2)
位相差板10を回転軸12回りに回転させて、入射面角度Φを異なる複数の入射面角度Φg(g=1,2,…)に設定する。そして、各入射面角度Φgに対して、(ステップ1)を繰り返す。
(ステップ1)および(ステップ2)により、入射面角度Φg(g=1,2,…)と入射角Θh(h=1,2,…)の組み合わせに対して、透過光強度Iexp(Φg,Θh)を測定する。入射面角度Φgは、相異なる3つ以上に設定する。なお、入射面角度Φgには0°、45°、90°が含まれているのが好ましい。
【0048】
(ステップ3)
(3a)位相差板10の主屈折率nX、nY、nZと厚さdを適当な値に設定し、透過光強度Iexp(Φg,Θh)の測定で用いた検光子40の透過軸方向41、回転軸12回りの回転角(光21の入射角Θg)、回転軸11回りの回転角度(入射面角度Φh)の組合せそれぞれについて、[式16]〜[式19]を用いて透過光強度Ical(Φg,Θh)を計算する。
(3b)ステップ(3a)で求めた透過光強度Ical(Φg,Θh)と測定した透過光強度Iexp(Φg,Θh)が一致(必要な精度以内に近接)するよう、共役勾配法や準ニュートン法を用いた最小二乗法等の逐次最適化手法を用いて、位相差板10の主屈折率nX、nY、nZと厚さdを決定する。
【0049】
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0050】
[第2の実施の形態]
第1の実施の形態の光学素子評価方法では、透過光強度の計算値と透過光透過の測定値が一致(必要な精度以内に近接)するように、未知のパラメータ(主屈折率nX、nY、nZと厚さd)を決定したが、透過光強度の測定値から位相差を求めて位相差の測定値とし、この位相差の測定値と位相差の計算値が一致(必要な精度以内に近接)するように、未知のパラメータ(位相差板の主屈折率nX、nY、nZと厚さd)を決定することもできる。
以下に、第2の実施の形態の光学素子評価方法を説明する。なお、第2の実施の形態の光学素子評価方法を実施する光学素子評価装置としては、図2に示されている評価装置を用いることができる。
【0051】
一軸性位相差板では、垂直入射時(入射角Θ=0°)に、透過光に発生する位相差(リタデーションに等しい)が重要である。一軸性位相差板の位相差(リタデーション)測定方法として、検光子等を回転させて透過光強度の極小値あるいは極大値を測定し、測定した極小値あるいは極大値から透過光の位相差を求める方法(例えば、セナレルモン法、)や、入射側に設けた光弾性変調器を用いて透過光強度に周期的変調を与え、透過光強度の変調成分から透過光の位相差を求める方法が知られている。これらの方法は、透過光強度の直接演算で透過光の位相差を求めるのではなく、透過光強度から透過光の位相差の情報を間接的に求めている。
二軸性位相差板では、透過光に発生する位相差は、[式20]で表されるように、形式上は、一軸性位相差板における垂直入射時の透過光の位相差と同形式で記述することができる。したがって、一軸性位相差板の位相差(リタデーション)測定方法を、二軸性位相差板における位相差の測定に用いることができる。位相差の測定値と[式15]〜[式17]を用いて計算される位相差が一致(必要な精度以内に近接)するように、主屈折率等の未知のパラメータを決定する光学素子評価方法は、透過光強度を直接使用しない、一軸性位相差板の位相差(リタデーション)測定方法を用いることができるので、便利である。また、変調を利用する方法は、高速に測定を行うことができるので、測定時間の短縮が要望される用途への適用に適している。
【0052】
一例として、回転検光子法を用いた光学素子評価方法を説明する。
図2に示されている光学素子評価装置において、偏光子30の透過軸方向31を、x軸から45°方向に設定し、検光子40(透過軸方向41)を、x軸に平行な回転軸回りに角速度Ωで回転させる。既知の位相差板60は挿入しない。時間t(検光子40の透過軸方向41=Ωt)での透過光強度Iは、[式26]で表される。
【数26】
[式26]
ここで、δは、透過光の位相差である。tsとtpは、位相差板10を透過した光22の電場ベクトルのs偏光成分Eoutsとp偏光成分Eoutpの大きさである。
【0053】
検出器50の出力信号をロックイン検出する方法等を用いることにより、[式26]の係数a、b、定数I0(全光量)を求めることができる。したがって、[式27]により、透過光22の位相差δを求めることができる。
【数27】
[式27]
【0054】
主屈折率nX、nY、nZと厚さdを適当に設定した時の透過光の位相差δは、[式17]と[式19]を用いて計算される、検光子40に入射する前の光の電場ベクトルのs偏光成分Etsとp偏光成分Etpの偏角と[式28]から計算することができる。
【数28】
[式28]
ここで、argは、偏角を表す。Re(u)とIm(u)は、それぞれuの実数部と虚数部を戻り値とする関数である。
【0055】
この位相差の計算値と位相差の測定値が一致(必要な精度以内に近接)するように、共役勾配法や準ニュートン法等を用いた最小二乗法等の逐次最適化手法を用いて、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を評価することができる。
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0056】
[第3の実施の形態]
第1の実施の形態および第2の実施の形態の光学素子評価方法では、位相差板の主屈折率nX、nY、nZと厚さdを求めたが、位相差板の主屈折率nX、nY、nZと厚さdの代わりに、垂直入射時(入射角Θ=0°)のリタデーション、厚さ方向のリタデーション、位相差板の主屈折率の一つ(nX、nY、nZのいずれか一つ)、厚さdを求めることもできる。
以下に、第3の実施の形態の光学素子評価方法を説明する。なお、第3の実施の形態の光学素子評価方法を実施する光学素子評価装置としては、図2に示されている光学素子評価装置を用いることができる。
【0057】
垂直入射時のリタデーションReと厚さ方向のリタデーションRthは、二軸性位相差板を特徴付ける物理量であり、[式29]で表される。
【数29】
[式29]
ここでは、屈折率主軸(X軸、Y軸、Z軸)のうちの1つの屈折率主軸(Z軸)が位相差板法線方向に平行であり、残りの2つの屈折率主軸(X軸、Y軸)が位相差板の表面に平行であると定義している。なお、垂直入射時のリタデーションReと厚さ方向のリタデーションRthそれぞれに対して、符号の取り方を逆に定義することもできるが、ここでは[式29]の適宜で説明する。
【0058】
[式29]を主屈折率nYとnZについて解くと、[式30]が得られる。
【数30】
[式30]
【0059】
[式30]は、(主屈折率nX,nY,nZ、厚さd)というパラメータの組と(主屈折率nX、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、厚さd)というパラメータの組は、どちらかが分かれば他方が求められることを示している。つまり、原理上は、どちらのパラメータの組を求めても違いはない。
【0060】
[式21]を、[式30]を用いて書き換えると、[式31]が得られる。
【数31】
[式31]
【0061】
[式21]と[式31]は、表現が異なるだけで同じ式である。この2つの式を、位相差板を評価する目的、つまり、位相差板の偏光特性を求めるという視点、あるいは、目的の偏光特性が得られるかどうかを判断するという視点で見直してみる。
[式21]をみると、位相差板で発生する位相差Γは、複屈折率(主屈折率の差)(より詳しくは、複屈折率と厚さdの積、厚さd、主屈折率nXの3つのパラメータ)でおおよそ決まることがわかる。一般的に、複屈折率は主屈折率に対して非常に小さい(主屈折率が1のオーダーであるのに対し、複屈折率は10−2〜10−4のオーダー)ので、主屈折率から複屈折率を計算する場合、複屈折率の有効桁数は、主屈折率の有効桁数より数桁小さくなる。逆に、主屈折率には、複屈折率や複屈折率から計算される位相差の有効桁数より数桁大きい有効桁数が必要となる。そのため、計算コストがかかる。
【0062】
また、逐次最適化手法を用いて未知のパラメータを決定する場合、目的関数(最小二乗法の場合、測定値と計算値の差の二乗)によって計算値と測定値の比較を行う。このため、測定値の有効桁数が、決定する(複数の)未知のパラメータの最大の有効桁数以上でないと、必要な有効桁数(精度)で未知のパラメータを決定することができない。なぜなら、目的関数の値の有効桁数は、未知のパラメータの最大の有効桁数以上になることはなく、また、測定値の有効桁数以上の精度で測定値と計算値が一致していると判断することは意味がないからである(例えば、有効桁数3桁の測定値1.00に対して、5桁の計算値1.0001と1.0002のどちらが近いかを判断することは意味がない)。つまり、逐次最適化手法を用いて主屈折率nX、nY、nZと厚さdを評価する場合、主屈折率に必要な有効桁数の測定値が必要となる。
【0063】
一方、[式31]は、与えたnX、Re、Rth、dの有効桁数と同程度の有効桁数で、位相差板で発生する位相差を計算することができることを示している。なぜなら、2つの変数の乗除算の結果の有効桁数は、有効桁数の小さい方の変数の有効桁数になり、また、加減算の結果の有効桁数は、最大で、整数部は大きい方、小数部は小さい方に合わせた時の有効桁数になり、また、[式31]の最上段の式において、[第1項の絶対値>第2項の絶対値>第3項の絶対値]が成り立つからである。[式31]の最上段の式の第1項は、Reと等しいので有効桁数も等しく、第2項以下も、各項はReと等しい有効桁数で与えることができる。第1項に第2項以下を加減算していく時は、上記不等式のため、最も大きい有効な位が0にならない限り有効桁数は変わらないので、計算される位相差の有効桁数は、与えたnX、Re、Rth、dの有効桁数と同程度となる。つまり、逐次最適化手法を用いてnX、nY、nZ、dを求めるより、nX、Re、Rth、dを求める方が、評価で必要な有効桁数が小さくてすむので、測定値に必要な有効桁数も小さくてすむ。このため、測定が容易になる。また、計算時間を短縮することができる。
なお、以上の説明では、主屈折率nXを基準として複屈折率を定義したが、他の主屈折率nYやnZを基準とすることもできる。
また、第3の実施の形態では、第1の実施の形態のように、透過光強度の計算値と測定値が一致するように未知パラメータを決定する方法や、第2の実施の形態のように、測定した透過光強度から位相差を求めて位相差の測定値とし、この位相差の測定値と[式15]〜[式17]を使用して計算した位相差が一致するように未知パラメータを決定する方法を用いることもできる。
【0064】
本実施の形態の光学素子評価方法では、位相差板10の実効的屈折率nZ,1とnZ,2の計算式[式16]あるいはkZ,1とkZ,2の計算式[式15]が正確であり、且つ未知のパラメータを求めるために必要な測定条件である、3つ以上の入射面角度で透過光強度を測定している。これにより、位相差板10の未知のパラメータ(主屈折率nX、nY、nZと厚さd)を正確に評価することができる。
また、本実施の形態の光学素子評価方法では、単一の波長の光(単色光)を使用することができ、従来技術のように、波長が異なる複数の光を使用する必要がない。一般的に、主屈折率は、光の波長に依存する(波長分散)。このため、本実施の形態の光学素子評価方法では、主屈折率の波長分散にともなう問題を考慮する必要がない。
【0065】
本発明の光学素子評価方法を用いて評価対象(位相差板)を評価した実施例を説明する。各実施例では、図2に示されている光学素子評価装置を用いて評価を行った。
(実施例1)
光源20として、ハロゲンランプと、単色化用の、半値全幅が10nmであるレーザー用干渉フィルタ(中心波長546nm)により構成される光源を用いた。
偏光子30と検光子40として、樹脂製偏光フィルタをガラスで挟んだもの(消光比10000:1)を用いた。また、光の進行方向(z軸)に平行な軸を中心に偏光子30と検光子40を回転させる回転駆動機構を設けた。回転駆動機構として、ステッピングモータにより駆動される回転駆動機構を用いた。
試料10を支持する支持台として、アルミニウム製の板に、光が通過する直径2cmの孔を開けたものを、黒色塗料(つや消し)で塗装したものを用いた。そして、光の進行方向(z軸)に直角な回転軸11を中心に支持台(および支持台に支持されている評価対象10)を回転させるための回転駆動機構を設けた。また、光の進行方向(z軸)に平行な回転軸12を中心に試料10を回転させるための回転駆動機構を支持台に設けた。回転駆動機構として、ステッピングモータにより駆動される回転駆動機構を用いた。
既知の位相差板60として、波長546nm用の水晶製1/4波長板を用いた。また、光の進行方向(z軸)に平行な軸を中心に既知の位相差板60を回転させる回転駆動機構を設けた。回転駆動機構として、ステッピングモーにより駆動される回転駆動機構を用いた。
検出器50として、光ダイオードを用いた。検出器50の出力信号は、16ビットのA/Dコンバータを介してパソコンで読み出せるようにした。このパソコンは、各回転駆動機構の制御装置としても用いた。
試料10として、樹脂製の二軸性位相差板を、液晶セル用にガラス基板に貼付したものを用いた。
【0066】
試料10の評価に先立ち、光21が入射する表面の屈折率主軸方向を以下の方法で求めた。まず、偏光子30の透過軸方向31を、図2のx軸に対して45°方向に向け、検光子40の透過軸方向41を、図2のx軸に対して135°方向に向けた。
次に、検査対象10を、支持台に、その法線方向(位相差板法線方向)が光21の進行方向(z軸)に平行になるように設置した。そして、試料10を、回転軸12回りに15°づつ回転させながら検出器50で透過光強度Iを測定した。
測定した透過光強度Iを、[式32]でフィッティングして屈折率主軸方向ζを求めた。求めた屈折率主軸方向ζが[1.1°]であったので、試料10の回転軸12回りの回転角度に[−1.1°]のオフセットをかけるように、パソコンの設定を行った。
【数32】
[式32]
ここで、θは、支持台の、回転軸12回りの回転角度である。ζは、図2のx軸から見た、試料10を設置した時の、試料10の表面の屈折率主軸方向である。I0は、規格化定数である。gは、わずかな迷光や熱雑音の時間平均などの定常雑音を表している。
【0067】
試料10を、回転軸12回りに逆方向に[1.1°]回転させた。前記したように、パソコンには[−1.1°]のオフセットが設定されているので、この状態で、試料10の表面の屈折率主軸の一方(主屈折率nXに対応する屈折率主軸あるいは主屈折率nYに対応する屈折率主軸)が図2のx軸と平行になる。
(ステップ1)
(1a)x軸と、前述した試料10の表面の屈折率主軸の一方のなす角度が所定の角度−Φ1となるように、試料10を回転軸12回りに回転させる。これにより、試料10の表面の屈折率主軸の一方から見た入射面角度ΦがΦ1になる。この状態で、支持台を、回転軸11回りに角度Θ1回転させる。これにより、試料10の表面の法線に対する光の入射角ΘがΘ1となる。
偏光子30の透過軸方向31は、x軸に対して45°方向へ向けた。ただし、入射面角度Φが45°方向の時は、75°方向へ向けた。1/4波長板60は抜去した。
この入射面角度Φ1、入射角Θ1の状態で、検光子40の透過軸方向41をx軸方向に向けた時の透過光強度Iexpx(Φ1,Θ1)、検光子40の透過軸方向41をy軸方向に向けた時の透過光強度Iexpy(Φ1,Θ1)、検光子40の透過軸方向41をx軸に対して45°方向に向けた時の透過光強度Iexpxy(Φ1,Θ1)、この状態で、1/4波長板60を、遅相軸方向61をx軸方向に向けて挿入した時の透過光強度Iexpqxy(Φ1,Θ1)の4つの透過光強度を測定した。
(1b)入射角Θが、Θh(Θh;−25°,−20°,0°,20°,25°)となるように、支持台を回転軸11回りに回転させ(入射角Θの符号は、図2で試料10の上部分が右側に移動し、下部分が左側に移動する回転方向、すなわち、手前側から見て、時計回り方向を正とした)、各入射角において(ステップ1a)を繰り返した。
(ステップ1)により、透過光強度Iexpx(Φ1,Θh)、Iexpy(Φ1,Θh)、Iexpxy(Φ1,Θh)、Iexpqxy(Φ1,Θh)を測定した。
【0068】
(ステップ2)
入射面角度Φが、Φg(Φg;0°,15°,30°,45°,60°,75°,90°)となるように、回転軸12回りに試料10を回転させ、各入射面角度Φgにおいて(ステップ1)を繰り返した。
(ステップ1)と(ステップ2)により、透過光強度Iexpx(Φg,Θh)、Iexpy(Φg,Θh)、Iexpxy(Φg,Θh)、Iexpqxy(Φg,Θh)を測定した。
【0069】
(ステップ3)
(3a)主屈折率nX、nY、nZ厚さdの初期値として、nX=1.535、nY=1.530、nY=1.533、d=80μmを設定した。
(3b)最小化する目的関数Fとして、(ステップ1)と(ステップ2)で測定した透過光強度Iexpm(Φg,Θh)(m;x,y,xy,qxyのいずれか、g;1,2,…、h;1,2,…)と、[式15]〜[式19]を用いて計算した、測定した透過光強度Iexpm(Φg,Θh)と対応する透過光強度Icalm(Φg,Θh)の差の二乗を、m、Φg、Θhについて足し上げたものを計算する([式34])。計算では全光量という任意性があるので、測定値と計算値それぞれを、Iexpx(Φ,Θ)+Iexpy(Φ,Θ)とIxcal(Φ,Θ)+Icaly(Φ,Θ)で除している)、準ニュートン法を用いた最小二乗法により、(1)の初期値から目的関数Fを最小化する主屈折率nX、nY、nZを求めた。
【数33】
[式33]
【0070】
結果、nX=1.5332、nY=1.5310、nZ=1.5325、d=78.24μmが得られた。最小化にはマイクロソフト社のMicrosoft Offfice EXCEL2003(登録商標)の機能を利用したので、結果自体は15桁で表示されるが、適当な有効桁数で丸めている。(以下も同様である。)
【0071】
(実施例2)
実施例1で得た透過光強度の測定値Iexpm(Φg,Θh)(m;x,y,xy,qxyのいずれか、g;1,2,…、h;1,2,…)と計算値Icalm(Φg,Θh)から、[式34]により、透過光22の位相差の測定値δexpと計算値δcalを得た。[式34]中のqは、expかcalのいずれか。
【数34】
[式34]
ここで、k0=2π/λは、大気中での波数であり、位相差を波長単位で表すために1/k0を乗じている。
実施例1の(ステップ3b)の目的関数Fを、[式35]に置き換えて最小化した。
【数35】
[式35]
結果、nX=1.5333、nY=1.5311、nZ=1.5326、d=77.52μmが得られた。
【0072】
(実施例3)
実施例1の(ステップ3a)の初期値を、nX=1.5333、Re=170nm、Rth=−30nm、d=75μmに設定した。
実施例1の(ステップ3b)の目的関数Fを、[式35]に置き換え、実施例2で得た透過光22の位相差の測定値δexpと計算値δcalに対して目的関数Fを最小化する主屈折率の一つ(この場合、nX)、垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、厚さdを求めた。
結果、nX=1.5333、Re=168.4nm、Rth=−30.8nm、d=77.78μmが得られた。
【0073】
本発明は、実施の形態で説明した構成に限定されず、種々の変更、追加、削除が可能である。
光学素子評価方法の構成は、実施の形態で説明した構成に限定されない。例えば、各手順の処理内容や各手順の処理順序は適宜変更可能である。
実効的屈折率nZ,1とnZ,2を用いて透過光強度や透過光の位相差を算出する方法は、実施の形態で説明した方法に限定されない。
光学素子評価装置の構成は、実施の形態で説明した構成に限定されない。例えば、各構成要素の構成や各構成要素の配置個所は適宜変更可能である。また、入射面角度Φおよび入射角Θを調整(変更)する構成は、実施の形態で説明した構成に限定されない。すなわち、入射面角度Φおよび入射角Θを調整できるように、評価対象(試料)が光源に対して相対的に回転可能であればよい。例えば、入射面角度Φを変更するために、光の進行方向(z軸)に平行な回転軸12を中心に評価対象(試料)10を回転させる回転機構を用いたが、光の進行方向(z軸)に平行な回転軸を中心に偏光子30を回転させる回転機構を用いることもできる。また、入射角Θを変更するために、光の進行方向(z軸)に垂直な回転軸11を中心に評価対象(試料)10を回転させる回転機構を用いたが、評価対象(試料)10の表面の法線(位相差板法線方向)に垂直な回転軸を中心に光源20、偏光子30、検光子40、検出器50、既知の位相差板60等を回転させる回転機構を用いることもできる。
【符号の説明】
【0074】
10 位相差板(検査対象,試料)
20 光源
21 光源から照射される光
22 位相差板を透過した光
30 偏光子
31 偏光子の透過軸方向
40 検光子
41 検光子の透過軸方向
50 検出器
60 既知の位相差板
61 既知の位相板の遅相軸方向
【特許請求の範囲】
【請求項1】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価方法であって、
前記光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θで、単色の偏光を前記光学素子の前記表面に入射し、前記光学素子を透過した後検光子を透過した透過光の透過光強度を測定するステップを、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して実行し、
前記測定した複数の透過光強度が、以下の式で示される、前記光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と
【数36】
前記光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、前記2つの固有偏光が前記光学素子中を伝播することにより発生する前記2つの固有偏光の間の位相差Γで決まることを利用して、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする光学素子評価方法。
【請求項2】
請求項1に記載の光学素子評価方法であって、
前記測定した複数の透過光強度と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して算出した複数の透過光強度に基づいて、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする光学素子評価方法。
【請求項3】
請求項1に記載の光学素子評価方法であって、
前記測定した複数の透過光強度を用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記測定した複数の透過光強度を用いて算出した複数の透過光の位相差と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差に基づいて、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする評価方法。
【請求項4】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価方法であって、
前記光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θで、単色の偏光を前記光学素子の前記表面に入射し、前記光学素子を透過した後検光子を透過した透過光の透過光強度を測定するステップを、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して実行し、
前記測定した複数の透過光強度が、以下の式で示される、前記光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と
【数37】
前記光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、前記2つの固有偏光が前記光学素子中を伝播することにより発生する前記2つの固有偏光の間の位相差Γで決まることを利用して、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項5】
請求項4に記載の光学素子評価方法であって、
前記測定した複数の透過光強度と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して算出した複数の透過光強度に基づいて、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項6】
請求項4に記載の光学素子評価方法であって、
前記測定した複数の透過光強度を用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記測定した複数の透過光強度を用いて算出した複数の透過光の位相差と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差に基づいて、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項7】
請求項1〜6のいずれかに記載の光学素子評価方法であって、
前記入射面角度Φは、少なくとも0°、45°、90°を含んでいることを特徴とする光学素子評価方法。
【請求項8】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価装置であって、
単色光を照射する光源と、
前記光源から照射された単色光の中から透過軸方向の直線偏光を透過する偏光子と、
前記偏光子を透過した光が光学素子の表面に入射するように当該光学素子を支持する支持台と、
前記光学素子を透過した光の中から、透過軸方向の直線偏光を透過する検光子と、
前記検光子を透過した透過光の透過光強度を検出する検出装置と、
前記検出装置で検出した透過光強度を入力する解析装置を備え、
前記支持台に支持される光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φおよび前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θを調整可能に構成されており、
前記解析装置は、請求項1〜7のいずれかに記載の方法を用いて前記光学素子を評価することを特徴とする光学素子評価装置。
【請求項1】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価方法であって、
前記光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θで、単色の偏光を前記光学素子の前記表面に入射し、前記光学素子を透過した後検光子を透過した透過光の透過光強度を測定するステップを、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して実行し、
前記測定した複数の透過光強度が、以下の式で示される、前記光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と
【数36】
前記光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、前記2つの固有偏光が前記光学素子中を伝播することにより発生する前記2つの固有偏光の間の位相差Γで決まることを利用して、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする光学素子評価方法。
【請求項2】
請求項1に記載の光学素子評価方法であって、
前記測定した複数の透過光強度と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して算出した複数の透過光強度に基づいて、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする光学素子評価方法。
【請求項3】
請求項1に記載の光学素子評価方法であって、
前記測定した複数の透過光強度を用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記測定した複数の透過光強度を用いて算出した複数の透過光の位相差と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差に基づいて、前記光学素子の主屈折率nX、nY、nZと厚さdを評価することを特徴とする評価方法。
【請求項4】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価方法であって、
前記光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φ、前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θで、単色の偏光を前記光学素子の前記表面に入射し、前記光学素子を透過した後検光子を透過した透過光の透過光強度を測定するステップを、3つ以上の入射面角度Φそれぞれと複数の入射角Θの組合せに対して実行し、
前記測定した複数の透過光強度が、以下の式で示される、前記光学素子中を伝播する2つの固有偏光に対する実効的屈折率nZ,1とnZ,2の差と
【数37】
前記光学素子の厚さdとの積(nZ,2−nZ,1)dで表される、前記2つの固有偏光が前記光学素子中を伝播することにより発生する前記2つの固有偏光の間の位相差Γで決まることを利用して、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項5】
請求項4に記載の光学素子評価方法であって、
前記測定した複数の透過光強度と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して算出した複数の透過光強度に基づいて、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項6】
請求項4に記載の光学素子評価方法であって、
前記測定した複数の透過光強度を用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて、透過光の位相差を、前記複数の透過光強度を測定した入射面角度Φと入射角Θの組合せに対して複数算出し、
前記測定した複数の透過光強度を用いて算出した複数の透過光の位相差と、前記2つの固有偏光の間の位相差Γ=(nZ,2−nZ,1)dを用いて算出した複数の透過光の位相差に基づいて、前記光学素子の垂直入射時のリタデーションRe、厚さ方向のリタデーションRth、主屈折率nX、nY、nZのうちの一つと厚さdを評価することを特徴とする光学素子評価方法。
【請求項7】
請求項1〜6のいずれかに記載の光学素子評価方法であって、
前記入射面角度Φは、少なくとも0°、45°、90°を含んでいることを特徴とする光学素子評価方法。
【請求項8】
互いに直交する3つの屈折率主軸(X軸、Y軸、Z軸)それぞれに対応する異なる主屈折率nX、nY、nZとZ軸方向の厚さdを有する光学素子を評価する光学素子評価装置であって、
単色光を照射する光源と、
前記光源から照射された単色光の中から透過軸方向の直線偏光を透過する偏光子と、
前記偏光子を透過した光が光学素子の表面に入射するように当該光学素子を支持する支持台と、
前記光学素子を透過した光の中から、透過軸方向の直線偏光を透過する検光子と、
前記検光子を透過した透過光の透過光強度を検出する検出装置と、
前記検出装置で検出した透過光強度を入力する解析装置を備え、
前記支持台に支持される光学素子の、光が入射する表面の屈折率主軸(X軸、Y軸)の一方と入射面のなす入射面角度Φおよび前記光学素子の前記表面の法線(Z軸方向)と光の進行方向のなす入射角Θを調整可能に構成されており、
前記解析装置は、請求項1〜7のいずれかに記載の方法を用いて前記光学素子を評価することを特徴とする光学素子評価装置。
【図1】

【図2】
【図2】
【公開番号】特開2012−32346(P2012−32346A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−174043(P2010−174043)
【出願日】平成22年8月2日(2010.8.2)
【出願人】(596028756)名菱テクニカ株式会社 (4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年8月2日(2010.8.2)
【出願人】(596028756)名菱テクニカ株式会社 (4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]