
光波形等化装置

【課題】4次以上のチャープ係数を連続的に制御して、より高精度なチャープの極小化を可能にする光波形等化装置を提供すること。
【解決手段】入力光の2次以上のチャープの係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段10と、チャープ制御手段10の出力光の一部を入力し、出力光の波形のモニタ値を出力する光モニタ手段20とからなる。チャープ制御手段10は、光モニタ手段20から出力されたモニタ値に基づいて係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを探索し、チャープを極小化するように各係数を制御する。
【解決手段】入力光の2次以上のチャープの係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段10と、チャープ制御手段10の出力光の一部を入力し、出力光の波形のモニタ値を出力する光モニタ手段20とからなる。チャープ制御手段10は、光モニタ手段20から出力されたモニタ値に基づいて係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを探索し、チャープを極小化するように各係数を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は光波形等化装置に関し、より詳細には、出力光のモニタ値に基づきチャープ係数を制御する光波形等化装置に関する。
【背景技術】
【0002】
1ピコ秒以下の光パルスの発生には帯域約1テラヘルツ以上の光スペクトルを有する広帯域光が必要である。ここで、広帯域光はA(ω)exp[iφ(ω)]と表される。ただし、A(ω)は光角周波数ωの電界成分の振幅、φ(ω)は光位相を表す。
【0003】
光位相φ(ω)の2階導関数は広帯域光の時間幅増大または波形歪みの原因となる。これをチャープと呼ぶ。チャープは式
【0004】
【数1】

【0005】
で表される。ここで、ω0は広帯域光の中心周波数、Ck(k=2、3、...)は上記チャープC(ω)の展開係数である。すなわち、広帯域光が、時間幅が極小化、すなわちフーリエ変換限界の波形に等化されるためには、チャープが0になるように、広帯域光源に後置される光チャープ制御手段によって制御される必要がある。光チャープ制御手段は式
【0006】
【数2】
【0007】
で表される波長分散β(ω)を設定可能な素子が用いられる。
【0008】
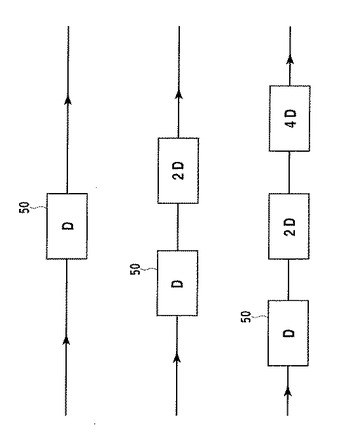
図9に、第1の従来例を示す。本第1の従来例では、光チャープ制御手段として単一モードファイバのような固定波長分散素子40を用いてチャープを補償する。複数の固定波長分散素子を組み合わせることで所望の補償を行うことが可能である。単一モードファイバの分散値、および分散スロープは、光位相φ(ω)の2階および3階微分係数に対応する(非特許文献1参照)。
【0009】
図10に、第2の従来例を示す。本第2の従来例では、光チャープ制御手段としてチャープファイバブラッググレーティング70を用いる。光サーキュレータ60に2つのチャープファイバブラッググレーティング70が接続されているが、チャープファイバブラッググレーティング60に熱あるいは張力を印加することにより、波長分散を連続的に変化させることが可能である(非特許文献2、3参照)。
【先行技術文献】
【非特許文献】
【0010】
【非特許文献1】T. Morioka, et al, “Transform-limited, femtosecond WDM pulse generation by spectral filtering of gigahertz supercontinuum,” Electron. Lett., vol. 30, 1994, pp. 1166-1167
【非特許文献2】S. Matsumoto; et al, “Tunable dispersion slope compensator with a chirped fiber grating and a divided thin-film heater for 160-Gb/s RZ transmissions,” Photonics Technology Letters, IEEE , vol.16, no.4, pp.1095-1097, April 2004
【非特許文献3】Tetsuro Komukai; et al, The Design of Dispersion Equalizers Using Chirped Fiber Bragg Gratings, IEEE JOURNAL OF QUANTUM ELECTRONICS, VOL. 36, NO. 4, APRIL 2000 pp.409-417
【非特許文献4】K. Kikuchi, “Highly sensitive interferometric autocorrelator using Si avalanche photodiode as two-photon absorber,” Electronics Letters, vol.34, no.1, pp.123-125, 8 Jan 1998
【非特許文献5】T. Inui et al, “160 Gbit/s adaptive dispersion equaliser using asynchronous chirp monitor with balanced dispersion configuration,” Electronics Letters, vol.40, no.4, pp. 256-257, 19 Feb. 2004
【非特許文献6】M. A. F. Roelens, et al, “Dispersion trimming in a reconfigurable wavelength selective switch,” IEEE JLT, vol. 26, pp. 73-78, 2008
【非特許文献7】K. Seno, et al, “Channel-by-channel tunable optical dispersion compensator consisting of arrayed-waveguide grating and liquid crystal on silicon,” in Proc. OFC/NFOEC2008, OWP4
【非特許文献8】K. Mori,et al, “Analysis and design of supercontinuum pulse generation in a singlemode optical fiber,” J. Opt. Soc. Am. B, vol. 18, pp. 1780-1792, 2001
【非特許文献9】M. Sugiyama et al, “A low drive voltage LiNbO3 phase and intensity integrated modulator for optical frequency comb generation and short pulse generation,” in Proc. on ECOC2004, Tu3.4.3.
【非特許文献10】T. Yamamoto et al, “Spectrally flattened phase-locked multi-carrier light generator with phase modulators and chirped fibre Bragg grating,” Electron. Lett., vol. 43, pp.1040-1042, 2007
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、第1の従来例では、連続的に波長分散値を変化させられないため、波長分散設定における誤差が避けられず、チャープの極小化が困難であった。また、第2の従来例では、連続的に波長分散値を変化させることができるが、4次以上の高次のチャープを補償することは困難であった。
【0012】
本発明は、このような課題に鑑みてなされたもので、その目的とするところは、4次以上のチャープ係数を連続的に制御して、より高精度なチャープの極小化を可能にする光波形等化装置を提供することにある。
【課題を解決するための手段】
【0013】
上記の課題を解決するために、請求項1に記載の本発明は、光波形等化装置であって、入力光の2次以上のチャープ
【0014】
【数3】
【0015】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段と、前記チャープ制御手段の出力光が入力され、前記出力光の波形の特徴を表すモニタ値を出力する光モニタ手段を備え、前記チャープ制御手段は、前記モニタ値が目標値に近づくように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0016】
請求項2に記載の発明は、請求項1に記載の光波形等化装置において、前記光チャープ制御手段への入力光を発生する光源部をさらに備えたことを特徴とする。
【0017】
請求項3に記載の発明は、請求項1に記載の光波形等化装置において、前記光チャープ制御手段は回折光学素子および光位相変移手段を備え、前記入力光を前記第1の回折光学素子で分光し、前記係数Ck(k=2、3、...)を制御するために前記分光された入力光の各波長成分の波長分散を前記光位相変移手段で制御し、波長分散を調整された各波長成分を前記第2の回折光学素子で集光することを特徴とする。
【0018】
請求項4に記載の発明は、請求項1に記載の光波形等化装置において、前記光モニタ手段が光波形観測手段であることを特徴とする。
【0019】
請求項5に記載の発明は、請求項1に記載の光波形等化装置において、前記光モニタ手段が2次の光非線形観測手段であることを特徴とする。
【0020】
請求項6に記載の発明は、請求項4に記載の光波形等化装置において、前記モニタ手段の出力するモニタ値がパルス幅であり、前記チャープ制御手段は前記パルス幅を最小化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0021】
請求項7に記載の発明は、請求項4に記載の光波形等化装置において、前記モニタ手段の出力するモニタ値がパルスのピーク値であり、前記チャープ制御手段は前記ピーク値を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0022】
請求項8に記載の発明は、請求項5に記載の光波形等化装置において、前記モニタ手段の出力が2次の光非線形観測手段の時間平均出力であり、前記時間平均出力を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0023】
請求項9に記載の発明は、請求項1に記載の光波形等化装置において、前記入力光の強度スペクトル形状を制御する手段をさらに備えたことを特徴とする。
【発明の効果】
【0024】
本発明は、4次以上のチャープ係数を連続的に制御することにより、チャープの極小化の精度を高める効果を奏する。
【図面の簡単な説明】
【0025】
【図1】本発明の第1の実施形態に係る光波形等化装置の構成図である。
【図2】第1の実施形態における光チャープ制御手段10の構成図である。
【図3】(a)は等化前の光波形(初期状態)を示す図であり、(b)は等化後の光波形(目標状態)を示す図である。
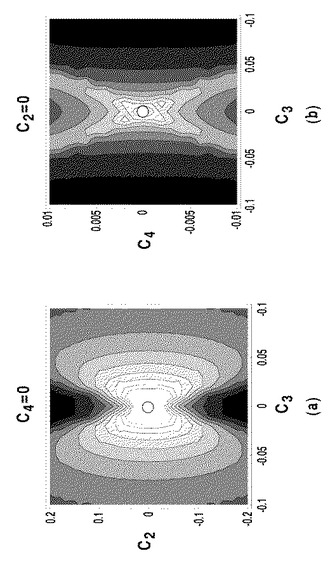
【図4】(a)、(b)はパルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化前のモニタ値のマップである。
【図5】(a)、(b)はパルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化後のモニタ値のマップである。
【図6】最適化探索の過程を立体的に表した図である。
【図7】本発明の第2の実施形態に係る光波形等化装置を示す図である。
【図8】本発明の第3の実施形態に係る光波形等化装置を示す図である。
【図9】第1の従来例を示す図である。
【図10】第2の従来例を示す図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態について、詳細に説明する。
【0027】
(第1の実施形態)
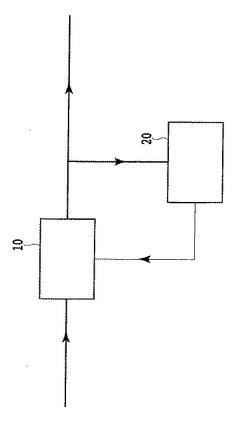
図1に、本発明の第1の実施形態に係る光波形等化装置を示す。本実施形態では、入力光の2次以上のチャープ
【0028】
【数4】
【0029】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段10と、チャープ制御手段10の出力光の一部を入力し、出力光の波形のモニタ値を出力する光モニタ手段20とからなる。チャープ制御手段10は、光モニタ手段20から出力されたモニタ値が目標値に近づくように係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを探索することにより、チャープを極小化するように各係数を制御する。
【0030】
チャープ制御手段10がチャープの極小化を行うために用いる、光波形の等化を示すモニタ値として下記3種が挙げられる。
【0031】
第1のモニタ値は、パルス幅であり、最適化の目標はパルス幅の最小化である。パルス幅としてはピーク値からある割合だけ落ちた波形レベルにおける時間幅が挙げられる。3dB(50%)ダウンの場合は半値全幅と呼ばれる。この他、標準偏差を用いたパルス幅の評価方法等も挙げられる。
【0032】
第2のモニタ値は、パルスのピーク値であり、最適化の目標はパルスのピーク値の最大化である。波形等化に際し、チャープ制御手段10の出力の平均強度が変化することがある。この場合、ピーク値を平均強度で規格化した値をモニタ値として利用するとよい。
【0033】
第1および第2のモニタ値の光モニタ手段20としては、光波形観測手段を用いることができる。光波形観測手段としては、オートコリレータまたは光サンプリングスコープを用いることができる。
【0034】
第3のモニタ値は、2次の光非線形観測手段の時間平均出力であり、最適化の目標は2次の光非線形観測手段の時間平均出力の最大化である。波形等化に際し、チャープ制御手段10の出力の平均強度が変化することがある。この場合、2次の光非線形観測手段の時間平均出力を平均強度(あるいはその2乗)で規格化した値をモニタ値として利用するとよい。
【0035】
第3のモニタ値の光モニタ手段20としては、2次の光非線形観測手段を用いることができる。2次の光非線形観測手段としては、使用波長の2倍程度のバンドギャップを有する2光子吸収素子(非特許文献4)、あるいは2倍高調波光発生手段と光検出器とからなる手段(非特許文献5)を用いることができる。
【0036】
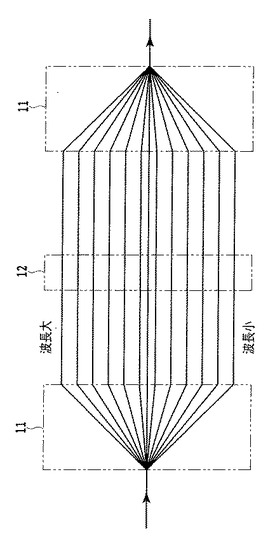
図2に、第1の実施形態における光チャープ制御手段10の構成例を示す。回折光学素子11と空間型光位相変移手段12とを備え、前段の回折光学素子11で分光された入射光の各波長成分の波長分散β(ω)を空間型光位相変移手段12で調節し、後段の回折光学素子11で集光することにより、対応するチャープC(ω)の展開係数Ck(k=2、3、・・・)を調節することが可能となっている。
【0037】
回折光学素子11には、空間型回折格子あるいはアレイ導波路型回折格子を用いることができる。空間型光位相変移手段12には、液晶アレイ素子あるいは微小光学機械素子(光MEMS)を用いることができる。光チャープ制御手段10は、これらを組み合わせることで実現可能である(非特許文献6、7参照)。
【0038】
チャープ係数の探索方法としては、山登り法、焼きなまし法、および遺伝的アルゴリズム等の進化的アルゴリズムが挙げられる。
【0039】
山登り法を用いた光波形等化のシミュレーションを以下に示す。
【0040】
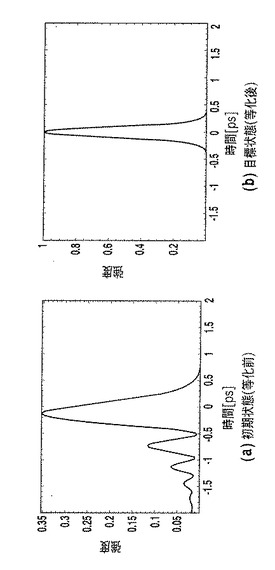
図3(a)は等化前の光波形(初期状態)で、チャープは未知とする。光チャープの状態を波長分散制御手段の状態{Ck}(k=2、3、...)の組で表す。現在の状態{Ck0}に対し、複数の近傍の状態(複数){Ck}を波長分散制御手段によって与え、近傍の状態{Ck}のうち、光モニタ手段20の出力がチャープの極小化に関して最適化{Ckpot}されたときの状態を次期の「現在の状態」{Ck0}とする。これを繰り返し、現在の状態{Ck0}に対し、近傍が最適化されなくなった状態を目標状態とする。図3(b)に、等化後の光波形(目標状態)を示す。
【0041】
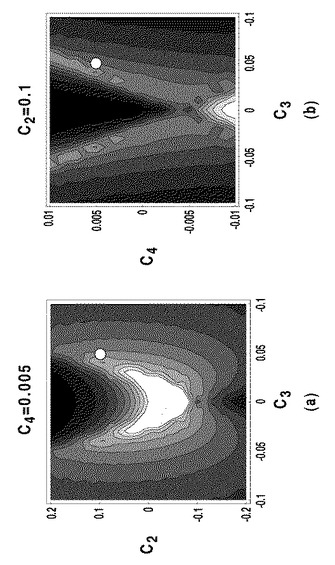
パルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化前のモニタ値のマップを図4(a)、(b)に示し、等価後のモニタ値のマップを図5(a)、(b)に示す。光波形等化の過程はこのマップに対する最適地探索に対応する。図6に、この最適地探索の過程を立体的に表したものを示す。
【0042】
状態{Ck}の探索において、最初に粗い最適化探索を行い、最もチャープが極小化された状態{Ck}を詳細な最適化探索の初期状態としてもよい。また、モニタ値の測定のばらつきに対処するため、平均化および平滑化処理を行ってもよい。
【0043】
(第2の実施形態)
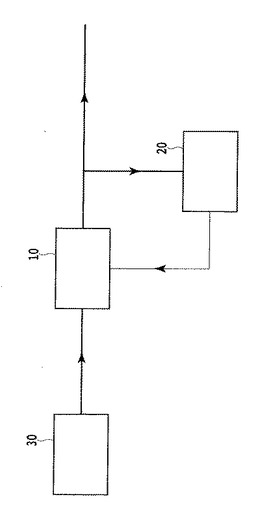
図7に、発明の第2の実施形態に係る光波形等化装置を示す。第2の実施形態は、第1の実施形態に、光チャープ制御手段10への入力光を発生する光源部30をさらに備える。
【0044】
光源部30としてはパルス光源を用いる。例えば、CW光源に後置された変調器出力、モード同期光源、利得スイッチ光源、あるいは白色パルスを出力するスーパーコンティニウム光源(非特許文献8)を用いることができる。前述のような光波形との同期を要しないモニタ手段を用いる場合は受動モード同期光源を用いることも可能である。この他、光強度変調器または光位相変調器を備えた光源(非特許文献9、10)を用いることも可能である。
【0045】
(第3の実施形態)
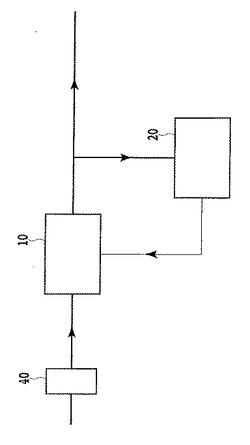
図8に、本発明の第3の実施形態に係る光波形等化装置を示す。第3の実施形態は、第1の実施形態において、入力光のスペクトル幅を拡大させる光強度スペクトル等化手段40を光チャープ制御手段10の前段に備える。
【0046】
光強度スペクトル等化手段40としては、スペクトルを平坦化する透過特性を有する光フィルタがある。また、回折光学素子および空間型光強度減衰手段から構成される可変形の構成も許される。さらに光強度スペクトル等化の機能を光チャープ制御手段が備える構成も可能である。
【符号の説明】
【0047】
10 光チャープ制御手段
20 光モニタ手段
11 回折光学素子
12 空間型光位相変移手段
30 光源部
40 光強度スペクトル等化手段
50 固定波長分散素子
60 光サーキュレータ
70 チャープファイバブラッググレーティング
【技術分野】
【0001】
本発明は光波形等化装置に関し、より詳細には、出力光のモニタ値に基づきチャープ係数を制御する光波形等化装置に関する。
【背景技術】
【0002】
1ピコ秒以下の光パルスの発生には帯域約1テラヘルツ以上の光スペクトルを有する広帯域光が必要である。ここで、広帯域光はA(ω)exp[iφ(ω)]と表される。ただし、A(ω)は光角周波数ωの電界成分の振幅、φ(ω)は光位相を表す。
【0003】
光位相φ(ω)の2階導関数は広帯域光の時間幅増大または波形歪みの原因となる。これをチャープと呼ぶ。チャープは式
【0004】
【数1】
【0005】
で表される。ここで、ω0は広帯域光の中心周波数、Ck(k=2、3、...)は上記チャープC(ω)の展開係数である。すなわち、広帯域光が、時間幅が極小化、すなわちフーリエ変換限界の波形に等化されるためには、チャープが0になるように、広帯域光源に後置される光チャープ制御手段によって制御される必要がある。光チャープ制御手段は式
【0006】
【数2】
【0007】
で表される波長分散β(ω)を設定可能な素子が用いられる。
【0008】
図9に、第1の従来例を示す。本第1の従来例では、光チャープ制御手段として単一モードファイバのような固定波長分散素子40を用いてチャープを補償する。複数の固定波長分散素子を組み合わせることで所望の補償を行うことが可能である。単一モードファイバの分散値、および分散スロープは、光位相φ(ω)の2階および3階微分係数に対応する(非特許文献1参照)。
【0009】
図10に、第2の従来例を示す。本第2の従来例では、光チャープ制御手段としてチャープファイバブラッググレーティング70を用いる。光サーキュレータ60に2つのチャープファイバブラッググレーティング70が接続されているが、チャープファイバブラッググレーティング60に熱あるいは張力を印加することにより、波長分散を連続的に変化させることが可能である(非特許文献2、3参照)。
【先行技術文献】
【非特許文献】
【0010】
【非特許文献1】T. Morioka, et al, “Transform-limited, femtosecond WDM pulse generation by spectral filtering of gigahertz supercontinuum,” Electron. Lett., vol. 30, 1994, pp. 1166-1167
【非特許文献2】S. Matsumoto; et al, “Tunable dispersion slope compensator with a chirped fiber grating and a divided thin-film heater for 160-Gb/s RZ transmissions,” Photonics Technology Letters, IEEE , vol.16, no.4, pp.1095-1097, April 2004
【非特許文献3】Tetsuro Komukai; et al, The Design of Dispersion Equalizers Using Chirped Fiber Bragg Gratings, IEEE JOURNAL OF QUANTUM ELECTRONICS, VOL. 36, NO. 4, APRIL 2000 pp.409-417
【非特許文献4】K. Kikuchi, “Highly sensitive interferometric autocorrelator using Si avalanche photodiode as two-photon absorber,” Electronics Letters, vol.34, no.1, pp.123-125, 8 Jan 1998
【非特許文献5】T. Inui et al, “160 Gbit/s adaptive dispersion equaliser using asynchronous chirp monitor with balanced dispersion configuration,” Electronics Letters, vol.40, no.4, pp. 256-257, 19 Feb. 2004
【非特許文献6】M. A. F. Roelens, et al, “Dispersion trimming in a reconfigurable wavelength selective switch,” IEEE JLT, vol. 26, pp. 73-78, 2008
【非特許文献7】K. Seno, et al, “Channel-by-channel tunable optical dispersion compensator consisting of arrayed-waveguide grating and liquid crystal on silicon,” in Proc. OFC/NFOEC2008, OWP4
【非特許文献8】K. Mori,et al, “Analysis and design of supercontinuum pulse generation in a singlemode optical fiber,” J. Opt. Soc. Am. B, vol. 18, pp. 1780-1792, 2001
【非特許文献9】M. Sugiyama et al, “A low drive voltage LiNbO3 phase and intensity integrated modulator for optical frequency comb generation and short pulse generation,” in Proc. on ECOC2004, Tu3.4.3.
【非特許文献10】T. Yamamoto et al, “Spectrally flattened phase-locked multi-carrier light generator with phase modulators and chirped fibre Bragg grating,” Electron. Lett., vol. 43, pp.1040-1042, 2007
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、第1の従来例では、連続的に波長分散値を変化させられないため、波長分散設定における誤差が避けられず、チャープの極小化が困難であった。また、第2の従来例では、連続的に波長分散値を変化させることができるが、4次以上の高次のチャープを補償することは困難であった。
【0012】
本発明は、このような課題に鑑みてなされたもので、その目的とするところは、4次以上のチャープ係数を連続的に制御して、より高精度なチャープの極小化を可能にする光波形等化装置を提供することにある。
【課題を解決するための手段】
【0013】
上記の課題を解決するために、請求項1に記載の本発明は、光波形等化装置であって、入力光の2次以上のチャープ
【0014】
【数3】
【0015】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段と、前記チャープ制御手段の出力光が入力され、前記出力光の波形の特徴を表すモニタ値を出力する光モニタ手段を備え、前記チャープ制御手段は、前記モニタ値が目標値に近づくように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0016】
請求項2に記載の発明は、請求項1に記載の光波形等化装置において、前記光チャープ制御手段への入力光を発生する光源部をさらに備えたことを特徴とする。
【0017】
請求項3に記載の発明は、請求項1に記載の光波形等化装置において、前記光チャープ制御手段は回折光学素子および光位相変移手段を備え、前記入力光を前記第1の回折光学素子で分光し、前記係数Ck(k=2、3、...)を制御するために前記分光された入力光の各波長成分の波長分散を前記光位相変移手段で制御し、波長分散を調整された各波長成分を前記第2の回折光学素子で集光することを特徴とする。
【0018】
請求項4に記載の発明は、請求項1に記載の光波形等化装置において、前記光モニタ手段が光波形観測手段であることを特徴とする。
【0019】
請求項5に記載の発明は、請求項1に記載の光波形等化装置において、前記光モニタ手段が2次の光非線形観測手段であることを特徴とする。
【0020】
請求項6に記載の発明は、請求項4に記載の光波形等化装置において、前記モニタ手段の出力するモニタ値がパルス幅であり、前記チャープ制御手段は前記パルス幅を最小化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0021】
請求項7に記載の発明は、請求項4に記載の光波形等化装置において、前記モニタ手段の出力するモニタ値がパルスのピーク値であり、前記チャープ制御手段は前記ピーク値を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0022】
請求項8に記載の発明は、請求項5に記載の光波形等化装置において、前記モニタ手段の出力が2次の光非線形観測手段の時間平均出力であり、前記時間平均出力を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする。
【0023】
請求項9に記載の発明は、請求項1に記載の光波形等化装置において、前記入力光の強度スペクトル形状を制御する手段をさらに備えたことを特徴とする。
【発明の効果】
【0024】
本発明は、4次以上のチャープ係数を連続的に制御することにより、チャープの極小化の精度を高める効果を奏する。
【図面の簡単な説明】
【0025】
【図1】本発明の第1の実施形態に係る光波形等化装置の構成図である。
【図2】第1の実施形態における光チャープ制御手段10の構成図である。
【図3】(a)は等化前の光波形(初期状態)を示す図であり、(b)は等化後の光波形(目標状態)を示す図である。
【図4】(a)、(b)はパルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化前のモニタ値のマップである。
【図5】(a)、(b)はパルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化後のモニタ値のマップである。
【図6】最適化探索の過程を立体的に表した図である。
【図7】本発明の第2の実施形態に係る光波形等化装置を示す図である。
【図8】本発明の第3の実施形態に係る光波形等化装置を示す図である。
【図9】第1の従来例を示す図である。
【図10】第2の従来例を示す図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態について、詳細に説明する。
【0027】
(第1の実施形態)
図1に、本発明の第1の実施形態に係る光波形等化装置を示す。本実施形態では、入力光の2次以上のチャープ
【0028】
【数4】
【0029】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段10と、チャープ制御手段10の出力光の一部を入力し、出力光の波形のモニタ値を出力する光モニタ手段20とからなる。チャープ制御手段10は、光モニタ手段20から出力されたモニタ値が目標値に近づくように係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを探索することにより、チャープを極小化するように各係数を制御する。
【0030】
チャープ制御手段10がチャープの極小化を行うために用いる、光波形の等化を示すモニタ値として下記3種が挙げられる。
【0031】
第1のモニタ値は、パルス幅であり、最適化の目標はパルス幅の最小化である。パルス幅としてはピーク値からある割合だけ落ちた波形レベルにおける時間幅が挙げられる。3dB(50%)ダウンの場合は半値全幅と呼ばれる。この他、標準偏差を用いたパルス幅の評価方法等も挙げられる。
【0032】
第2のモニタ値は、パルスのピーク値であり、最適化の目標はパルスのピーク値の最大化である。波形等化に際し、チャープ制御手段10の出力の平均強度が変化することがある。この場合、ピーク値を平均強度で規格化した値をモニタ値として利用するとよい。
【0033】
第1および第2のモニタ値の光モニタ手段20としては、光波形観測手段を用いることができる。光波形観測手段としては、オートコリレータまたは光サンプリングスコープを用いることができる。
【0034】
第3のモニタ値は、2次の光非線形観測手段の時間平均出力であり、最適化の目標は2次の光非線形観測手段の時間平均出力の最大化である。波形等化に際し、チャープ制御手段10の出力の平均強度が変化することがある。この場合、2次の光非線形観測手段の時間平均出力を平均強度(あるいはその2乗)で規格化した値をモニタ値として利用するとよい。
【0035】
第3のモニタ値の光モニタ手段20としては、2次の光非線形観測手段を用いることができる。2次の光非線形観測手段としては、使用波長の2倍程度のバンドギャップを有する2光子吸収素子(非特許文献4)、あるいは2倍高調波光発生手段と光検出器とからなる手段(非特許文献5)を用いることができる。
【0036】
図2に、第1の実施形態における光チャープ制御手段10の構成例を示す。回折光学素子11と空間型光位相変移手段12とを備え、前段の回折光学素子11で分光された入射光の各波長成分の波長分散β(ω)を空間型光位相変移手段12で調節し、後段の回折光学素子11で集光することにより、対応するチャープC(ω)の展開係数Ck(k=2、3、・・・)を調節することが可能となっている。
【0037】
回折光学素子11には、空間型回折格子あるいはアレイ導波路型回折格子を用いることができる。空間型光位相変移手段12には、液晶アレイ素子あるいは微小光学機械素子(光MEMS)を用いることができる。光チャープ制御手段10は、これらを組み合わせることで実現可能である(非特許文献6、7参照)。
【0038】
チャープ係数の探索方法としては、山登り法、焼きなまし法、および遺伝的アルゴリズム等の進化的アルゴリズムが挙げられる。
【0039】
山登り法を用いた光波形等化のシミュレーションを以下に示す。
【0040】
図3(a)は等化前の光波形(初期状態)で、チャープは未知とする。光チャープの状態を波長分散制御手段の状態{Ck}(k=2、3、...)の組で表す。現在の状態{Ck0}に対し、複数の近傍の状態(複数){Ck}を波長分散制御手段によって与え、近傍の状態{Ck}のうち、光モニタ手段20の出力がチャープの極小化に関して最適化{Ckpot}されたときの状態を次期の「現在の状態」{Ck0}とする。これを繰り返し、現在の状態{Ck0}に対し、近傍が最適化されなくなった状態を目標状態とする。図3(b)に、等化後の光波形(目標状態)を示す。
【0041】
パルスのピーク値をモニタ値とした場合の状態{Ck}に対する等化前のモニタ値のマップを図4(a)、(b)に示し、等価後のモニタ値のマップを図5(a)、(b)に示す。光波形等化の過程はこのマップに対する最適地探索に対応する。図6に、この最適地探索の過程を立体的に表したものを示す。
【0042】
状態{Ck}の探索において、最初に粗い最適化探索を行い、最もチャープが極小化された状態{Ck}を詳細な最適化探索の初期状態としてもよい。また、モニタ値の測定のばらつきに対処するため、平均化および平滑化処理を行ってもよい。
【0043】
(第2の実施形態)
図7に、発明の第2の実施形態に係る光波形等化装置を示す。第2の実施形態は、第1の実施形態に、光チャープ制御手段10への入力光を発生する光源部30をさらに備える。
【0044】
光源部30としてはパルス光源を用いる。例えば、CW光源に後置された変調器出力、モード同期光源、利得スイッチ光源、あるいは白色パルスを出力するスーパーコンティニウム光源(非特許文献8)を用いることができる。前述のような光波形との同期を要しないモニタ手段を用いる場合は受動モード同期光源を用いることも可能である。この他、光強度変調器または光位相変調器を備えた光源(非特許文献9、10)を用いることも可能である。
【0045】
(第3の実施形態)
図8に、本発明の第3の実施形態に係る光波形等化装置を示す。第3の実施形態は、第1の実施形態において、入力光のスペクトル幅を拡大させる光強度スペクトル等化手段40を光チャープ制御手段10の前段に備える。
【0046】
光強度スペクトル等化手段40としては、スペクトルを平坦化する透過特性を有する光フィルタがある。また、回折光学素子および空間型光強度減衰手段から構成される可変形の構成も許される。さらに光強度スペクトル等化の機能を光チャープ制御手段が備える構成も可能である。
【符号の説明】
【0047】
10 光チャープ制御手段
20 光モニタ手段
11 回折光学素子
12 空間型光位相変移手段
30 光源部
40 光強度スペクトル等化手段
50 固定波長分散素子
60 光サーキュレータ
70 チャープファイバブラッググレーティング
【特許請求の範囲】
【請求項1】
入力光の2次以上のチャープ
【数1】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段と、
前記チャープ制御手段の出力光が入力され、前記出力光の波形の特徴を表すモニタ値を出力する光モニタ手段を備え、
前記チャープ制御手段は、前記モニタ値が目標値に近づくように前記係数Ck(k=2、3、...)を制御することを特徴とする光波形等化装置。
【請求項2】
前記光チャープ制御手段への入力光を発生する光源部をさらに備えたことを特徴とする請求項1に記載の光波形等化装置。
【請求項3】
前記光チャープ制御手段は回折光学素子および光位相変移手段を備え、
前記入力光を前記第1の回折光学素子で分光し、前記係数Ck(k=2、3、...)を制御するために前記分光された入力光の各波長成分の波長分散を前記光位相変移手段で制御し、波長分散を調整された各波長成分を前記第2の回折光学素子で集光することを特徴とする請求項1に記載の光波形等化装置。
【請求項4】
前記光モニタ手段が光波形観測手段であることを特徴とする請求項1に記載の光波形等化装置。
【請求項5】
前記光モニタ手段が2次の光非線形観測手段であることを特徴とする請求項1に記載の光波形等化装置。
【請求項6】
前記モニタ手段の出力するモニタ値がパルス幅であり、前記チャープ制御手段は前記パルス幅を最小化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項4に記載の光波形等化装置。
【請求項7】
前記モニタ手段の出力するモニタ値がパルスのピーク値であり、前記チャープ制御手段は前記ピーク値を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項4に記載の光波形等化装置。
【請求項8】
前記モニタ手段の出力が2次の光非線形観測手段の時間平均出力であり、前記時間平均出力を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項5に記載の光波形等化装置。
【請求項9】
前記入力光の強度スペクトル形状を制御する手段をさらに備えたことを特徴とする請求項1に記載の光波形等化装置。
【請求項1】
入力光の2次以上のチャープ
【数1】
の係数Ck(k=2、3、...)の少なくともkが4以上までのC2、...、Ckを制御可能なチャープ制御手段と、
前記チャープ制御手段の出力光が入力され、前記出力光の波形の特徴を表すモニタ値を出力する光モニタ手段を備え、
前記チャープ制御手段は、前記モニタ値が目標値に近づくように前記係数Ck(k=2、3、...)を制御することを特徴とする光波形等化装置。
【請求項2】
前記光チャープ制御手段への入力光を発生する光源部をさらに備えたことを特徴とする請求項1に記載の光波形等化装置。
【請求項3】
前記光チャープ制御手段は回折光学素子および光位相変移手段を備え、
前記入力光を前記第1の回折光学素子で分光し、前記係数Ck(k=2、3、...)を制御するために前記分光された入力光の各波長成分の波長分散を前記光位相変移手段で制御し、波長分散を調整された各波長成分を前記第2の回折光学素子で集光することを特徴とする請求項1に記載の光波形等化装置。
【請求項4】
前記光モニタ手段が光波形観測手段であることを特徴とする請求項1に記載の光波形等化装置。
【請求項5】
前記光モニタ手段が2次の光非線形観測手段であることを特徴とする請求項1に記載の光波形等化装置。
【請求項6】
前記モニタ手段の出力するモニタ値がパルス幅であり、前記チャープ制御手段は前記パルス幅を最小化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項4に記載の光波形等化装置。
【請求項7】
前記モニタ手段の出力するモニタ値がパルスのピーク値であり、前記チャープ制御手段は前記ピーク値を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項4に記載の光波形等化装置。
【請求項8】
前記モニタ手段の出力が2次の光非線形観測手段の時間平均出力であり、前記時間平均出力を最大化するように前記係数Ck(k=2、3、...)を制御することを特徴とする請求項5に記載の光波形等化装置。
【請求項9】
前記入力光の強度スペクトル形状を制御する手段をさらに備えたことを特徴とする請求項1に記載の光波形等化装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−39445(P2011−39445A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−189234(P2009−189234)
【出願日】平成21年8月18日(2009.8.18)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月18日(2009.8.18)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]