
光特性ムラ測定装置及び光特性ムラ測定方法
【課題】光特性ムラを短時間で高精度に測定することができる光特性ムラ測定装置を提供する。
【解決手段】撮像部110は、LED実装基板200−1に配列されたLED光源211を同時に撮像すると共に、各測定点Pから入射された光の特性値として、XYZ表色系のx値及びy値をそれぞれ検出する。パーソナルコンピュータは、光放射角に応じて定められた角度補正マトリクスを用いて、それぞれのLED光源211に対応する光特性値を、基準となる放射角に対応する値に補正する。LED光源211の特性値を放射角に応じて補正するため、複数のLED光源211を同時に撮像するにも拘わらず、正確な光特性値を得ることができる。
【解決手段】撮像部110は、LED実装基板200−1に配列されたLED光源211を同時に撮像すると共に、各測定点Pから入射された光の特性値として、XYZ表色系のx値及びy値をそれぞれ検出する。パーソナルコンピュータは、光放射角に応じて定められた角度補正マトリクスを用いて、それぞれのLED光源211に対応する光特性値を、基準となる放射角に対応する値に補正する。LED光源211の特性値を放射角に応じて補正するため、複数のLED光源211を同時に撮像するにも拘わらず、正確な光特性値を得ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光特性値のムラ(輝度ムラや色度ムラ等)を測定する光特性ムラ測定装置及び光特性ムラ測定方法に関する。本発明は、例えば、照明器用LED(Light Emitting Diode) 実装基板等の、光特性ムラの測定に適用することができる。
【背景技術】
【0002】
照明装置や表示装置等の光特性ムラを測定、評価する技術としては、例えば、下記特許文献1に記載されたものが知られている(特許文献1の段落[0064]等参照)。
【0003】
特許文献1の色ムラ測定装置では、まず、スクリーン21にカラーパターンを表示する。そして、このカラーパターンを撮像装置3で撮像する。
【0004】
続いて、検査対象測定位置51と色度と、比較測定位置52の色度とを検出する。
【0005】
その後、これら測定位置51、52の色度差を算出し、この色度差に基づいて、色度ムラを評価する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−139324号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述のように、従来の評価方法では、測定対象物(特許文献1の例では、スクリーン)の複数の測定位置を、1台の撮像装置で同時に撮像して、色度ムラの評価に使用している。
【0008】
しかしながら、このような方法では、撮像装置に受光される光の放射角が、測定位置毎に相違することになる。
【0009】
例えば測定対象物の中央点を通る法線上に撮像装置を配置した場合、この撮像装置は、中央点からの放射光(すなわち、法線方向に放射された光)と、測定対象物の端部からの放射光(すなわち、法線に対して斜めの方向に放射された光)とを同時に受光して比較することになる。
【0010】
このため、このような評価方法では、測定位置毎に測定条件が異なることになって、色度ムラを正確に評価することができない場合がある。例えば、LED等の光指向性が高い発光源では、法線方向に放射された光と斜め方向に放射された光とで、輝度や色度が大きく異なる。このため、例えば蛍光灯用LED実装基板等において、中央点に配置された発光素子の放射光と、端部に配置された発光素子の放射光とを、同一の撮像装置で同時に測定・比較しても、輝度ムラや色度ムラを精度良く評価することはできない。
【0011】
これに対して、測定対象物の一端側から他端側に撮像装置を相対移動させながら撮像を行うこととすれば、一行分の全ての測定位置の放射光を同一の角度から撮像することが可能である。しかし、この方法は、撮像装置又は測定対象物を移動させながら順次撮像を行っていく必要があるので、測定時間が長くなるという新たな欠点を招く。
【0012】
本発明の課題は、光特性ムラを短時間で高精度に測定することができる光特性ムラ測定装置及び光特性ムラ測定方法を提供する点にある。
【課題を解決するための手段】
【0013】
本発明に係る光特性ムラ測定装置は、測定対象物の表面に配列された複数の測定点を撮像して、該測定点から入射された光の特性値を検出する撮像部と、前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを記憶する記憶部と、前記補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算部とを有する。
【0014】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記補正用データは、前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算することで生成されることとすることができる。
【0015】
本発明の光特性ムラ測定装置は、上記構成に加えて、いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することとすることができる。
【0016】
本発明の光特性ムラ測定装置は、前記撮像部が、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像する構成とすることができる。
【0017】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記測定対象物の前記測定点を、一列又は複数列ずつ順次撮像する構成とすることができる。
【0018】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることとすることができる。
【0019】
本発明に係る光特性ムラ測定方法は、測定対象物の表面に配列された複数の測定点を撮像部で撮像して、該測定点から入射された光の特性値を検出する撮像ステップと、前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算ステップとを有する。
【0020】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記補正用データは、前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算することで生成されることとすることができる。
【0021】
本発明の光特性ムラ測定方法は、上記構成に加えて、いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することとすることができる。
【0022】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記撮像ステップを、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像するステップとすることができる。
【0023】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記撮像ステップを、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像するステップとすることができる。
【0024】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることとすることができる。
【発明の効果】
【0025】
本発明によれば、測定対象物の表面に直線状に配列された測定点の光特性値を、同一の放射角に対応する値に補正することができる。従って、本発明によれば、撮像部の位置や方向を変更せずに各測定点を撮像するにも拘わらず、光特性ムラを高精度に測定することができる。従って、本発明によれば、光特性ムラを短時間で高精度に測定することができる。
【0026】
本発明によれば、補正用データとして、基準となる放射角における光特性測定結果と他の放射角における光特性測定結果との比を使用することにより、簡単な演算処理によって光特性の補正を行うことができる。
【0027】
本発明によれば、2個の測定点に対応する測定結果及び放射角を用いて他の測定点に対応する補正用データを演算することにより、補正用データの生成を簡単化することができる。
【0028】
本発明によれば、同一の測定対象物の同一列の全ての測定点を同時に撮像することにより、撮像に要する時間を短縮することができる。
【0029】
本発明によれば、測定対象物の測定点を一列又は複数列ずつ順次撮像することにより、全ての測定点を同時に撮像する場合と比較して、光村測定装置の電源容量を低減することができる。
【0030】
本発明によれば、基準となる放射角を測定点の列毎に設け、列毎に特性値を補正することにより、列毎の光特性ムラを簡単な演算で求めることができる。
【図面の簡単な説明】
【0031】
【図1】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す斜視図である。
【図2】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す図であり、(a)は側面図、(b)は平面図である。
【図3】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示すブロック図である。
【図4】実施の形態に係る配光測定装置の構成を示す概念図である。
【図5】実施の形態に係る配光測定装置の測定結果の一例を示す表である。
【図6】実施の形態における光特性測定結果の一例を示す表である。
【図7】実施の形態における光特性測定結果を補正した結果の一例を示す表である。
【図8】実施の形態における補正結果を用いて光特性ムラを評価した結果の一例を示す表である。
【発明を実施するための形態】
【0032】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0033】
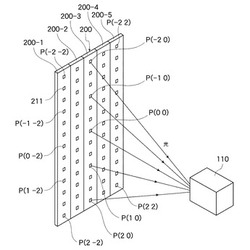
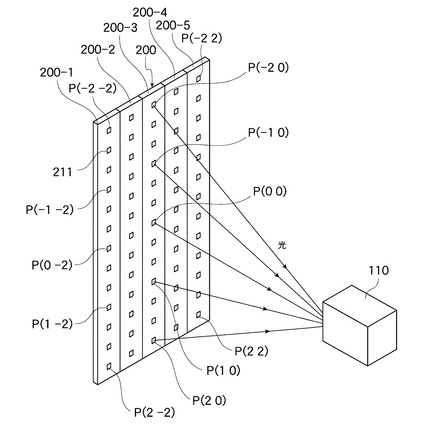
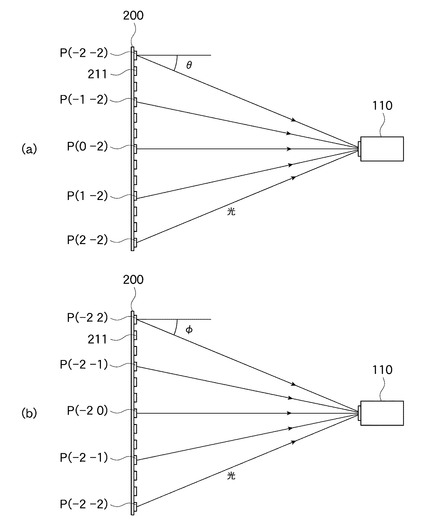
図1は、この実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す視図である。図2は、かかる光特性ムラ測定装置の要部構成を概念的に示す図であり、(a)は側面図、(b)は平面図である。また、図3は、かかる光特性ムラ測定装置の要部構成を示すブロック図である。
【0034】
図1乃至図3に示したように、この実施の形態の光特性ムラ測定装置100は、撮像部110と、パーソナルコンピュータ120とを備えている。この実施の形態では、光特性ムラ測定装置100を用いて、測定対象物200の光特性値を測定する。
【0035】
撮像部110は、測定対象物200の表面に配列された複数の測定点P(−2 −2)〜P(2 2)を撮像して、これら測定点から入射された光の特性値を検出する。
【0036】
この実施の形態では、撮像部110として、XYZカメラを使用する。XYZカメラとは、撮像データを、XYZ表色系の三刺激値として生成するカメラである。XYZ表色系とは、国際照明委員会(CIE)で承認された標準表色系であり、RGB表色系よりも人間の視覚に近い表色系であるとされている。但し、撮像部として、例えばRGBカメラ等、他の種類の撮像装置を使用することもできる。
【0037】
撮像部110は、撮像画像から各測定点の光特性値を検出して、外部へ出力する。この実施の形態では、光特性値として、XYZ表色系の三刺激値であるX値、Y値、Z値の成分比のうち、x(=X/(X+Y+Z))及びy(=Y/(X+Y+Z))を測定する。
【0038】
パーソナルコンピュータ120は、撮像部110からで取得されたx値及びy値を入力して、補正処理を施す。このために、パーソナルコンピュータ120は、記憶部121と補正演算部122とを備えている。
【0039】
記憶部121は、各測定点P(−2 −2)〜P(2 2)に対応する補正用データを記憶している。補正用データは、各測定点から撮像部110に達する光の放射角に応じて決定される。補正用データの詳細については、後述する。
【0040】
補正演算部122は、補正用データを用いて、測定された特性値(x値及びy値)を補正する。この補正により、この実施の形態では、全ての測定点P(−2 −2)〜P(2 2)の光特性値を、基準となる放射角で放射された光の特性値に変換する。補正演算の詳細については、後述する。
【0041】
測定対象物200としては、例えば、LED照明器用のLED実装基板が採用される。この実施の形態では、複数本(ここでは5本とする)のLED実装基板200−1〜200−5が一体に作製されたものを、測定対象物200とする。LED実装基板200−1〜200−5には、それぞれ、多数のLED光源211が設けられている。この実施の形態では、これらのLED光源211のうちの任意のLED光源211を選択して、測定点P(−2 −2)〜P(2 2)とした。測定点の数が多いほど、光特性のばらつきを精密に測定することができる。各LED光源211は、1個のLED素子から構成されていても良いし、2個或いはそれ以上のLED素子から構成されていても良い。
【0042】
なお、後述するように、この実施の形態では、測定対象物200の各LED実装基板200−1〜200−5に対して、個別に光特性ムラを評価する。そして、LED実装基板200−1〜200−5は、かかる評価の後で切断されて、良品であると評価されたもののみが製品として採用される。
【0043】
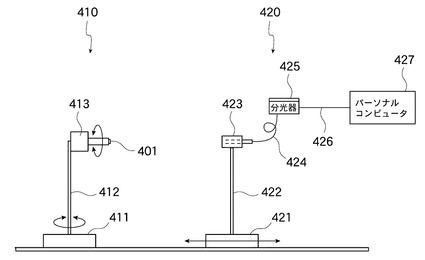
図4は、この実施の形態で使用する配光測定装置400の構成を示す概念図である。後述するように、この配光測定装置400は、補正用データ(この実施の形態では角度補正マトリクス)の生成に使用される。
【0044】
図4に示したように、この配光測定装置400は、光源支持部410と計測部420とを備えている。
【0045】
光源支持部410は、水平方向に回転する水平回転ステージ411を備えている。水平回転ステージ411の回転中心には、直立アーム412が固定されている。更に、直立アーム412の上端部には、垂直方向に回転する垂直回転ステージ413が固定されている。垂直回転ステージ412の回転中心には、補正値測定用のLED光源401が支持される。LED光源401としては、測定対象物200(すなわち、LED実装基板200−1〜200−5)に使用されるLED素子と同じ種類のものが使用される。
【0046】
一方、計測部420は、水平方向に移動可能なXYステージ421を備えている。XYステージ421には、直立アーム422が固定されている。更に、直立アーム422の上端には、受光器423が支持されている。受光器423は、LED光源401の放射光を受光する。受光器423が受光した光は、光ファイバ424を介して、分光器425に入力される。分光器425は、周波数毎の光センサ(図示せず)を備えており、入力光を光電変換する。かかる光電変換によって生成された電気信号は、信号線426を介して、パーソナルコンピュータ427に送られる。パーソナルコンピュータ427は、入力信号に基づいてXYZ表色系の三刺激値X、Y、Zを検出し、さらに、これらの値X、Y、Zからx値及びy値を演算する。
【0047】
この配光測定装置400によれば、回転ステージ411,412を回転させて、LED光源401の傾きを変化させることにより、該LED光源401の所望の放射角(測定対象物200に設けられた測定点P(−2 −2)〜P(2 2)の水平方向放射角φ、垂直方向放射角θに対応する放射角)についての光特性を測定することができる。
【0048】
次に、この実施の形態に係る装置を用いて光特性ムラを評価する手順を説明する。
【0049】
後述するように、この実施の形態では、LED実装基板200−1〜200−5毎に、個別に、光特性(ここではx値及びy値)を測定して補正する。
【0050】
例えば、LED実装基板200−1については、測定点P(−2 −2)、P(−1 −2)、P(0 −2)、P(1 −2)及びP(2 −2)の光特性をそれぞれ測定する。そして、これらのうち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)の測定結果を、基準となる測定点P(0 −2)に対応する値に補正する。すなわち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)の測定結果は、P(0 −2)に対応する放射角の光特性値に補正される。この結果、LED実装基板200−1の光特性バラツキが正確に評価できるようになる。
【0051】
他のLED実装基板200−2〜200−5も同様であり、垂直方向の角度θが0゜の測定点P(0 −1)、P(0 0)、P(0 1)、P(0 2)に対応させて他の測定点の測定結果を補正することで、光特性バラツキが正確に評価できるようになる。
【0052】
このように、この実施の形態では、垂直方向の放射角θが0゜である各測定点P(0 −2)、P(0 −1)、P(0 0)、P(0 1)、P(0 2)に対応する放射角を、「基準となる放射角」とする。
【0053】
以下、具体的な測定、補正方法の一例を説明する。
【0054】
最初に、角度補正マトリクス(本願発明の補正用データ)の生成方法を説明する。
【0055】
角度補正マトリクスの生成に際しては、まず、配光測定装置400を用いて、補正値測定用LED光源401の角度を変えながら、光特性値(x値及びy値)を測定する。
【0056】
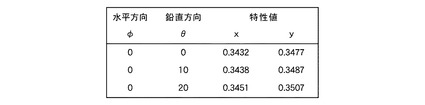
この実施形態では、水平方向の放射角がφ=−20゜、−10゜、0゜,10゜,20゜且つ垂直方向の放射角θ=−20゜、−10゜、0゜,10゜,20゜の場合それぞれの組み合わせについて三刺激値X、Y、Zの測定を行い、その測定結果からx値及びy値を算出した。
【0057】
次に、この測定結果を用いて、角度補正マトリクスを作成する。
【0058】
この実施の形態では、x値及びy値のそれぞれについて、基準となる放射角における値と他の放射角における値との比を示すマトリクス値を求めて、補正用データとする。
【0059】
上述の説明から解るように、この実施の形態では、(φ,θ)=(0゜,−20゜)、(0゜,−10゜)、(0゜,0゜)、(0゜,10゜)、(0゜,20゜)を基準放射角として使用する。
【0060】
ここでは、LED実装基板200−3(図1参照)の角度補正マトリクスを作成する場合(すなわち、基準放射角が(φ,θ)=(0゜,0゜)の場合)を例に採って説明する。
【0061】
測定点P(1 0)及びP(2 0)の補正を行うための角度補正マトリクスは、以下のような演算式を用いて算出される。
【0062】
下式において、Aは(φ,θ)=(0゜,10゜)の時のx値及びy値を示すマトリクス要素であり、Bは(φ,θ)=(0゜,20゜)の時のx値及びy値を示すマトリクス要素であり、Cは(φ,θ)=(0゜,0゜)の時のx値及びy値をCを示すマトリクス要素である。これらのマトリクス要素において、xa,xb,xcは、配光測定装置400で求められた、(φ,θ)=(0゜,10゜),(0゜,20゜),(0゜,0゜)の時のx値である。また、ya,yb,ycは、配光測定装置400で求められた、(φ,θ)=(0゜,10゜),(0゜,20゜),(0゜,0゜)の時のy値である。

【0063】
これらのマトリクス要素を下式に代入し、さらに、図5の表で示したx値及びy値を代入することにより、以下のような、2行2列の角度補正マトリクスΔCを求めることができる。このマトリクスにより、(φ,θ)=(0゜,10゜)に対応するx値、y値の測定結果と、(φ,θ)=(0゜,20゜)に対応するx値、y値の測定結果とを、同時に補正することができる。
【0064】
同様にして、(φ,θ)=(0゜,−10゜)に対応するx値、y値の測定結果と(φ,θ)=(0゜,−20゜)に対応するx値、y値の測定結果とを同時に補正するための角度補正マトリクスを作成する。
【0065】
また、φ=0゜以外の場合の角度補正マトリクスも、同様にして生成することができる。
【0066】
なお、以下のようにして、配光測定装置400で測定していない水平方向放射角φについての角度補正マトリクスを作成することも可能である。
【0067】
例えば、φ=0のときの角度補正マトリクスをΔC0、φ=10゜のときの角度補正マトリクスをΔC10とすると、これらの角度補正マトリクスΔC0、ΔC10は、下式のように表すことができる。
【0068】
そして、以下のような演算により、φ=5゜の時の角度補正マトリクスΔC5を求めることができる。
【0069】
これと同様にして、測定していない鉛直方向放射角θの角度補正マトリクスを演算することも可能である。
【0070】
このようにして、角度補正マトリクスの一部を演算で求めることにより、当該角度補正マトリクスを求める処理を簡単にすることができる。但し、光特性ムラの信頼性を向上させるためには、測定結果から求めた角度補正マトリクスが多い方が望ましい。
【0071】
以上のようにして得られた角度補正マトリクスは、パーソナルコンピュータ120の記憶部121(図3参照)に格納される。
【0072】
この実施の形態では、マトリクスを用いて角度補正マトリクスを作成したので、補正演算処理(後述)を簡単にすることができる。
【0073】
なお、ここでは、マトリクス形式の角度補正マトリクスを作成したが、例えば、x値及びy値のそれぞれについて、基準放射角の値と他の放射角の値との比を単純に演算することによって、角度補正マトリクスを得ることも可能である。
【0074】
次に、この実施の形態に係る光特性ムラ測定装置100(図1〜図3参照)を用いて測定対象物200の光特性ムラを測定する手順について説明する。
【0075】
上述のように、この実施の形態では、測定対象物200としてLED照明器用LED実装基板200−1〜200−5を用い、また、光特性としてXYZ表色系のx値及びy値を測定する。
【0076】
まず、基準となる測定対象物200の法線方向に位置するように撮像部110を配置する。
【0077】
このとき、この撮像部110の位置及び方向は、かかる法線方向に測定点P(0 0)から放射したLED光が垂直に入射されるように、調整される。
【0078】
更に、この撮像部110の距離等は、測定点P(−2 −2)〜P(2 2)から放射される光の入射角が、上述の角度補正マトリクスの放射角(水平方向放射角φ及び垂直方向放射角θ)と一致するように調整される。
【0079】
続いて、測定対象物200のうち、最左段のLED実装基板200−1に実装されたLEDが点灯される。そして、このLED実装基板200−1の放射光が、撮像部110に撮像される。その後、LED実装基板200−1のLEDが消灯される。
【0080】
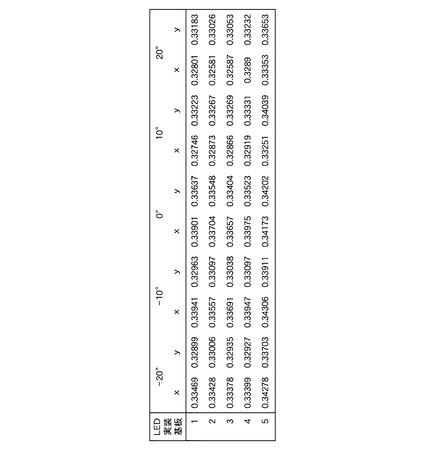
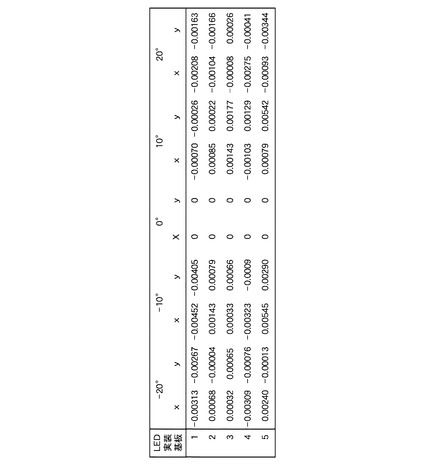
撮像部110は、各画素への入射光から、XYZ表色系のx値及びy値を検出する。図6は、この検出結果の一例を示す表である。図6において、LED実装基板1〜5は、図1のLED実装基板200−1〜200−5に対応する(図7及び図8において同じ)。
【0081】
そして、撮像部110は、各画素に対応するx値及びy値を、パーソナルコンピュータ120の補正演算部122に送る。
【0082】
補正演算部122は、各画素に対応するx値及びy値等の情報に基づいて、LED実装基板200−1の測定点P(−2 −2)、P(−1 −2)、P(0 −2)、P(1 −2)、P(2 −2)を特定する。そして、特定された各測定点のうち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)のx値及びy値を、以下のようにして補正する。
【0083】
この補正演算において、補正演算部122は、まず、記憶部121から、対応する角度補正マトリクスを読み出す。ここでは、φ=−20゜に対応する角度補正マトリクスΔCa,ΔCbが読み出される。
【0084】
そして、下記の演算を行うことにより、測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)の補正演算が行われる。なお、下式において、x1,x2,x3,x4は測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)のx値、y1,y2,y3,y4は測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)のy値である。
【0085】
このようにして、最上段のLED実装基板200−1の各測定点P(0 −2)〜P(0 2)に対する補正演算が終了する。
【0086】
これらの補正演算結果は、LED実装基板200−1の各測定点P(−2 −2)〜P(2 2)に対応するLED光源211を、基準放射角(すなわち、(φ,θ)=(0゜,−20゜)の方向)から測定したときのx値及びy値に相当する。従って、これらの補正演算結果を測定点間で比較することにより、x値及びy値の光特性ムラを正確に評価することができる。また、各測定点P(−2 −2)〜P(2 2)の撮像を同時に行うので、短時間で光り特性ムラの評価を行うことができる。
【0087】
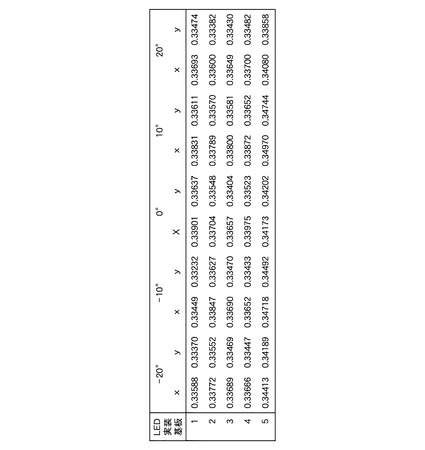
次に、二番目以降のLED実装基板200−2〜200−5についても、LED光源211が順次点灯されて、LED実装基板200−1の場合と同様の撮像や補正演算処理等が行われる。図7は、このようにしてx値及びy値(図7参照)を補正した値の一例である。
【0088】
その後、各LED実装基板200−1〜200−5の補正後の光特性値について、基準となる放射角に対応する値(θ=0゜のときのx値及びy値)とその他の値との差をそれぞれ演算する。これにより、LED実装基板200−1〜200−5毎の、光特性ムラを評価することができる。図8は、この演算の結果を示す表である。
【0089】
この実施の形態では、水平方向放射角φ毎に角度補正マトリクスを作成するので、二番目以降のLED実装基板200−2〜200−5について撮像を行う時も、撮像部110の位置や角度を調整する必要が無い。従って、この実施の形態によれば、x値及びy値のムラ評価を、短時間で正確に行うことができる。
【0090】
また、全てのLED実装基板200−1〜200−5のLED光源211を同時に点灯させるのでは無く、1個ずつ順次点灯させて撮像することにより、光特性ムラ測定装置の電源容量を小さく抑えることができる。
【0091】
但し、全てのLED実装基板200−1〜200−5のLED光源211を同時に点灯させることとしても良い。更には、LED実装基板を所定本数(二本以上)ずつ順次点灯させることとしても良い。これらの場合には、測定時間を更に短縮することができる。
【0092】
更に、各LED実装基板200−1〜200−5毎に複数回ずつ撮像を行い、これら撮像で得られたx値及びy値の合計を補正演算部122で補正した結果を用いて、光特性ムラの評価を行っても良い。これにより、さらに信頼性の高い評価を行うことができる。
【0093】
本発明によれば、光特性値をXYZ表色系のx値及びy値としたので、人間の視覚に合わせた光特性ムラの測定を行うことができる。
【0094】
なお、この実施の形態では、LED照明器用LED実装基板の光特性ムラ評価に本発明を適用する場合を説明したが、これに限らず、光の放射、反射、透過等を行う装置であれば、そのような装置の光特性ムラ評価にも適用することができる。
【0095】
この実施の形態では、水平方向放射角φ及び鉛直方向放射角θを0゜、±10゜、±20゜としたが、これらの角度は任意である。但し、角度の間隔を細かくするほど、光特性ムラの精度を向上させることができる。
【0096】
この実施形態では、LED実装基板200−1〜200−5を横方向に並べて、縦方向の列毎に基準となる測定点を設け、該縦方向の列毎に光特性ムラを測定・評価することとしたが、横方向の列毎に光特性ムラを測定・評価してもよい。また、基準となる測定点を、複数列毎に設けることや、測定対象物200全体で1個のみ設けて、複数列単位或いは測定対象物200全体の光特性ムラを測定・評価することも可能である。
【0097】
この実施の形態では、XYZ表色系のx値及びy値を評価したが、本発明は、例えばRGB表色系の三原色や輝度等、他の光特性の評価にも適用できる。
【符号の説明】
【0098】
100 光特性ムラ測定装置
110 撮像部
120,427 パーソナルコンピュータ
121 記憶部
122 補正演算部
200 測定対象物
200−1〜200−5 LED実装基板
211 LED光源
400 配光測定装置
401 補正値測定用LED光源
410 光源支持部
411 水平回転ステージ
412,422 直立アーム
413 垂直回転ステージ
420 計測部
421 XYステージ
423 受光器
424 光ファイバ
425 分光器
426 信号線
【技術分野】
【0001】
本発明は、光特性値のムラ(輝度ムラや色度ムラ等)を測定する光特性ムラ測定装置及び光特性ムラ測定方法に関する。本発明は、例えば、照明器用LED(Light Emitting Diode) 実装基板等の、光特性ムラの測定に適用することができる。
【背景技術】
【0002】
照明装置や表示装置等の光特性ムラを測定、評価する技術としては、例えば、下記特許文献1に記載されたものが知られている(特許文献1の段落[0064]等参照)。
【0003】
特許文献1の色ムラ測定装置では、まず、スクリーン21にカラーパターンを表示する。そして、このカラーパターンを撮像装置3で撮像する。
【0004】
続いて、検査対象測定位置51と色度と、比較測定位置52の色度とを検出する。
【0005】
その後、これら測定位置51、52の色度差を算出し、この色度差に基づいて、色度ムラを評価する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−139324号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述のように、従来の評価方法では、測定対象物(特許文献1の例では、スクリーン)の複数の測定位置を、1台の撮像装置で同時に撮像して、色度ムラの評価に使用している。
【0008】
しかしながら、このような方法では、撮像装置に受光される光の放射角が、測定位置毎に相違することになる。
【0009】
例えば測定対象物の中央点を通る法線上に撮像装置を配置した場合、この撮像装置は、中央点からの放射光(すなわち、法線方向に放射された光)と、測定対象物の端部からの放射光(すなわち、法線に対して斜めの方向に放射された光)とを同時に受光して比較することになる。
【0010】
このため、このような評価方法では、測定位置毎に測定条件が異なることになって、色度ムラを正確に評価することができない場合がある。例えば、LED等の光指向性が高い発光源では、法線方向に放射された光と斜め方向に放射された光とで、輝度や色度が大きく異なる。このため、例えば蛍光灯用LED実装基板等において、中央点に配置された発光素子の放射光と、端部に配置された発光素子の放射光とを、同一の撮像装置で同時に測定・比較しても、輝度ムラや色度ムラを精度良く評価することはできない。
【0011】
これに対して、測定対象物の一端側から他端側に撮像装置を相対移動させながら撮像を行うこととすれば、一行分の全ての測定位置の放射光を同一の角度から撮像することが可能である。しかし、この方法は、撮像装置又は測定対象物を移動させながら順次撮像を行っていく必要があるので、測定時間が長くなるという新たな欠点を招く。
【0012】
本発明の課題は、光特性ムラを短時間で高精度に測定することができる光特性ムラ測定装置及び光特性ムラ測定方法を提供する点にある。
【課題を解決するための手段】
【0013】
本発明に係る光特性ムラ測定装置は、測定対象物の表面に配列された複数の測定点を撮像して、該測定点から入射された光の特性値を検出する撮像部と、前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを記憶する記憶部と、前記補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算部とを有する。
【0014】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記補正用データは、前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算することで生成されることとすることができる。
【0015】
本発明の光特性ムラ測定装置は、上記構成に加えて、いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することとすることができる。
【0016】
本発明の光特性ムラ測定装置は、前記撮像部が、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像する構成とすることができる。
【0017】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記測定対象物の前記測定点を、一列又は複数列ずつ順次撮像する構成とすることができる。
【0018】
本発明の光特性ムラ測定装置は、上記構成に加えて、前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることとすることができる。
【0019】
本発明に係る光特性ムラ測定方法は、測定対象物の表面に配列された複数の測定点を撮像部で撮像して、該測定点から入射された光の特性値を検出する撮像ステップと、前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算ステップとを有する。
【0020】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記補正用データは、前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算することで生成されることとすることができる。
【0021】
本発明の光特性ムラ測定方法は、上記構成に加えて、いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することとすることができる。
【0022】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記撮像ステップを、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像するステップとすることができる。
【0023】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記撮像ステップを、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像するステップとすることができる。
【0024】
本発明の光特性ムラ測定方法は、上記構成に加えて、前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることとすることができる。
【発明の効果】
【0025】
本発明によれば、測定対象物の表面に直線状に配列された測定点の光特性値を、同一の放射角に対応する値に補正することができる。従って、本発明によれば、撮像部の位置や方向を変更せずに各測定点を撮像するにも拘わらず、光特性ムラを高精度に測定することができる。従って、本発明によれば、光特性ムラを短時間で高精度に測定することができる。
【0026】
本発明によれば、補正用データとして、基準となる放射角における光特性測定結果と他の放射角における光特性測定結果との比を使用することにより、簡単な演算処理によって光特性の補正を行うことができる。
【0027】
本発明によれば、2個の測定点に対応する測定結果及び放射角を用いて他の測定点に対応する補正用データを演算することにより、補正用データの生成を簡単化することができる。
【0028】
本発明によれば、同一の測定対象物の同一列の全ての測定点を同時に撮像することにより、撮像に要する時間を短縮することができる。
【0029】
本発明によれば、測定対象物の測定点を一列又は複数列ずつ順次撮像することにより、全ての測定点を同時に撮像する場合と比較して、光村測定装置の電源容量を低減することができる。
【0030】
本発明によれば、基準となる放射角を測定点の列毎に設け、列毎に特性値を補正することにより、列毎の光特性ムラを簡単な演算で求めることができる。
【図面の簡単な説明】
【0031】
【図1】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す斜視図である。
【図2】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す図であり、(a)は側面図、(b)は平面図である。
【図3】実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示すブロック図である。
【図4】実施の形態に係る配光測定装置の構成を示す概念図である。
【図5】実施の形態に係る配光測定装置の測定結果の一例を示す表である。
【図6】実施の形態における光特性測定結果の一例を示す表である。
【図7】実施の形態における光特性測定結果を補正した結果の一例を示す表である。
【図8】実施の形態における補正結果を用いて光特性ムラを評価した結果の一例を示す表である。
【発明を実施するための形態】
【0032】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0033】
図1は、この実施の形態に係る光特性ムラ測定装置の要部構成を概念的に示す視図である。図2は、かかる光特性ムラ測定装置の要部構成を概念的に示す図であり、(a)は側面図、(b)は平面図である。また、図3は、かかる光特性ムラ測定装置の要部構成を示すブロック図である。
【0034】
図1乃至図3に示したように、この実施の形態の光特性ムラ測定装置100は、撮像部110と、パーソナルコンピュータ120とを備えている。この実施の形態では、光特性ムラ測定装置100を用いて、測定対象物200の光特性値を測定する。
【0035】
撮像部110は、測定対象物200の表面に配列された複数の測定点P(−2 −2)〜P(2 2)を撮像して、これら測定点から入射された光の特性値を検出する。
【0036】
この実施の形態では、撮像部110として、XYZカメラを使用する。XYZカメラとは、撮像データを、XYZ表色系の三刺激値として生成するカメラである。XYZ表色系とは、国際照明委員会(CIE)で承認された標準表色系であり、RGB表色系よりも人間の視覚に近い表色系であるとされている。但し、撮像部として、例えばRGBカメラ等、他の種類の撮像装置を使用することもできる。
【0037】
撮像部110は、撮像画像から各測定点の光特性値を検出して、外部へ出力する。この実施の形態では、光特性値として、XYZ表色系の三刺激値であるX値、Y値、Z値の成分比のうち、x(=X/(X+Y+Z))及びy(=Y/(X+Y+Z))を測定する。
【0038】
パーソナルコンピュータ120は、撮像部110からで取得されたx値及びy値を入力して、補正処理を施す。このために、パーソナルコンピュータ120は、記憶部121と補正演算部122とを備えている。
【0039】
記憶部121は、各測定点P(−2 −2)〜P(2 2)に対応する補正用データを記憶している。補正用データは、各測定点から撮像部110に達する光の放射角に応じて決定される。補正用データの詳細については、後述する。
【0040】
補正演算部122は、補正用データを用いて、測定された特性値(x値及びy値)を補正する。この補正により、この実施の形態では、全ての測定点P(−2 −2)〜P(2 2)の光特性値を、基準となる放射角で放射された光の特性値に変換する。補正演算の詳細については、後述する。
【0041】
測定対象物200としては、例えば、LED照明器用のLED実装基板が採用される。この実施の形態では、複数本(ここでは5本とする)のLED実装基板200−1〜200−5が一体に作製されたものを、測定対象物200とする。LED実装基板200−1〜200−5には、それぞれ、多数のLED光源211が設けられている。この実施の形態では、これらのLED光源211のうちの任意のLED光源211を選択して、測定点P(−2 −2)〜P(2 2)とした。測定点の数が多いほど、光特性のばらつきを精密に測定することができる。各LED光源211は、1個のLED素子から構成されていても良いし、2個或いはそれ以上のLED素子から構成されていても良い。
【0042】
なお、後述するように、この実施の形態では、測定対象物200の各LED実装基板200−1〜200−5に対して、個別に光特性ムラを評価する。そして、LED実装基板200−1〜200−5は、かかる評価の後で切断されて、良品であると評価されたもののみが製品として採用される。
【0043】
図4は、この実施の形態で使用する配光測定装置400の構成を示す概念図である。後述するように、この配光測定装置400は、補正用データ(この実施の形態では角度補正マトリクス)の生成に使用される。
【0044】
図4に示したように、この配光測定装置400は、光源支持部410と計測部420とを備えている。
【0045】
光源支持部410は、水平方向に回転する水平回転ステージ411を備えている。水平回転ステージ411の回転中心には、直立アーム412が固定されている。更に、直立アーム412の上端部には、垂直方向に回転する垂直回転ステージ413が固定されている。垂直回転ステージ412の回転中心には、補正値測定用のLED光源401が支持される。LED光源401としては、測定対象物200(すなわち、LED実装基板200−1〜200−5)に使用されるLED素子と同じ種類のものが使用される。
【0046】
一方、計測部420は、水平方向に移動可能なXYステージ421を備えている。XYステージ421には、直立アーム422が固定されている。更に、直立アーム422の上端には、受光器423が支持されている。受光器423は、LED光源401の放射光を受光する。受光器423が受光した光は、光ファイバ424を介して、分光器425に入力される。分光器425は、周波数毎の光センサ(図示せず)を備えており、入力光を光電変換する。かかる光電変換によって生成された電気信号は、信号線426を介して、パーソナルコンピュータ427に送られる。パーソナルコンピュータ427は、入力信号に基づいてXYZ表色系の三刺激値X、Y、Zを検出し、さらに、これらの値X、Y、Zからx値及びy値を演算する。
【0047】
この配光測定装置400によれば、回転ステージ411,412を回転させて、LED光源401の傾きを変化させることにより、該LED光源401の所望の放射角(測定対象物200に設けられた測定点P(−2 −2)〜P(2 2)の水平方向放射角φ、垂直方向放射角θに対応する放射角)についての光特性を測定することができる。
【0048】
次に、この実施の形態に係る装置を用いて光特性ムラを評価する手順を説明する。
【0049】
後述するように、この実施の形態では、LED実装基板200−1〜200−5毎に、個別に、光特性(ここではx値及びy値)を測定して補正する。
【0050】
例えば、LED実装基板200−1については、測定点P(−2 −2)、P(−1 −2)、P(0 −2)、P(1 −2)及びP(2 −2)の光特性をそれぞれ測定する。そして、これらのうち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)の測定結果を、基準となる測定点P(0 −2)に対応する値に補正する。すなわち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)の測定結果は、P(0 −2)に対応する放射角の光特性値に補正される。この結果、LED実装基板200−1の光特性バラツキが正確に評価できるようになる。
【0051】
他のLED実装基板200−2〜200−5も同様であり、垂直方向の角度θが0゜の測定点P(0 −1)、P(0 0)、P(0 1)、P(0 2)に対応させて他の測定点の測定結果を補正することで、光特性バラツキが正確に評価できるようになる。
【0052】
このように、この実施の形態では、垂直方向の放射角θが0゜である各測定点P(0 −2)、P(0 −1)、P(0 0)、P(0 1)、P(0 2)に対応する放射角を、「基準となる放射角」とする。
【0053】
以下、具体的な測定、補正方法の一例を説明する。
【0054】
最初に、角度補正マトリクス(本願発明の補正用データ)の生成方法を説明する。
【0055】
角度補正マトリクスの生成に際しては、まず、配光測定装置400を用いて、補正値測定用LED光源401の角度を変えながら、光特性値(x値及びy値)を測定する。
【0056】
この実施形態では、水平方向の放射角がφ=−20゜、−10゜、0゜,10゜,20゜且つ垂直方向の放射角θ=−20゜、−10゜、0゜,10゜,20゜の場合それぞれの組み合わせについて三刺激値X、Y、Zの測定を行い、その測定結果からx値及びy値を算出した。
【0057】
次に、この測定結果を用いて、角度補正マトリクスを作成する。
【0058】
この実施の形態では、x値及びy値のそれぞれについて、基準となる放射角における値と他の放射角における値との比を示すマトリクス値を求めて、補正用データとする。
【0059】
上述の説明から解るように、この実施の形態では、(φ,θ)=(0゜,−20゜)、(0゜,−10゜)、(0゜,0゜)、(0゜,10゜)、(0゜,20゜)を基準放射角として使用する。
【0060】
ここでは、LED実装基板200−3(図1参照)の角度補正マトリクスを作成する場合(すなわち、基準放射角が(φ,θ)=(0゜,0゜)の場合)を例に採って説明する。
【0061】
測定点P(1 0)及びP(2 0)の補正を行うための角度補正マトリクスは、以下のような演算式を用いて算出される。
【0062】
下式において、Aは(φ,θ)=(0゜,10゜)の時のx値及びy値を示すマトリクス要素であり、Bは(φ,θ)=(0゜,20゜)の時のx値及びy値を示すマトリクス要素であり、Cは(φ,θ)=(0゜,0゜)の時のx値及びy値をCを示すマトリクス要素である。これらのマトリクス要素において、xa,xb,xcは、配光測定装置400で求められた、(φ,θ)=(0゜,10゜),(0゜,20゜),(0゜,0゜)の時のx値である。また、ya,yb,ycは、配光測定装置400で求められた、(φ,θ)=(0゜,10゜),(0゜,20゜),(0゜,0゜)の時のy値である。
【0063】
これらのマトリクス要素を下式に代入し、さらに、図5の表で示したx値及びy値を代入することにより、以下のような、2行2列の角度補正マトリクスΔCを求めることができる。このマトリクスにより、(φ,θ)=(0゜,10゜)に対応するx値、y値の測定結果と、(φ,θ)=(0゜,20゜)に対応するx値、y値の測定結果とを、同時に補正することができる。
【0064】
同様にして、(φ,θ)=(0゜,−10゜)に対応するx値、y値の測定結果と(φ,θ)=(0゜,−20゜)に対応するx値、y値の測定結果とを同時に補正するための角度補正マトリクスを作成する。
【0065】
また、φ=0゜以外の場合の角度補正マトリクスも、同様にして生成することができる。
【0066】
なお、以下のようにして、配光測定装置400で測定していない水平方向放射角φについての角度補正マトリクスを作成することも可能である。
【0067】
例えば、φ=0のときの角度補正マトリクスをΔC0、φ=10゜のときの角度補正マトリクスをΔC10とすると、これらの角度補正マトリクスΔC0、ΔC10は、下式のように表すことができる。
【0068】
そして、以下のような演算により、φ=5゜の時の角度補正マトリクスΔC5を求めることができる。
【0069】
これと同様にして、測定していない鉛直方向放射角θの角度補正マトリクスを演算することも可能である。
【0070】
このようにして、角度補正マトリクスの一部を演算で求めることにより、当該角度補正マトリクスを求める処理を簡単にすることができる。但し、光特性ムラの信頼性を向上させるためには、測定結果から求めた角度補正マトリクスが多い方が望ましい。
【0071】
以上のようにして得られた角度補正マトリクスは、パーソナルコンピュータ120の記憶部121(図3参照)に格納される。
【0072】
この実施の形態では、マトリクスを用いて角度補正マトリクスを作成したので、補正演算処理(後述)を簡単にすることができる。
【0073】
なお、ここでは、マトリクス形式の角度補正マトリクスを作成したが、例えば、x値及びy値のそれぞれについて、基準放射角の値と他の放射角の値との比を単純に演算することによって、角度補正マトリクスを得ることも可能である。
【0074】
次に、この実施の形態に係る光特性ムラ測定装置100(図1〜図3参照)を用いて測定対象物200の光特性ムラを測定する手順について説明する。
【0075】
上述のように、この実施の形態では、測定対象物200としてLED照明器用LED実装基板200−1〜200−5を用い、また、光特性としてXYZ表色系のx値及びy値を測定する。
【0076】
まず、基準となる測定対象物200の法線方向に位置するように撮像部110を配置する。
【0077】
このとき、この撮像部110の位置及び方向は、かかる法線方向に測定点P(0 0)から放射したLED光が垂直に入射されるように、調整される。
【0078】
更に、この撮像部110の距離等は、測定点P(−2 −2)〜P(2 2)から放射される光の入射角が、上述の角度補正マトリクスの放射角(水平方向放射角φ及び垂直方向放射角θ)と一致するように調整される。
【0079】
続いて、測定対象物200のうち、最左段のLED実装基板200−1に実装されたLEDが点灯される。そして、このLED実装基板200−1の放射光が、撮像部110に撮像される。その後、LED実装基板200−1のLEDが消灯される。
【0080】
撮像部110は、各画素への入射光から、XYZ表色系のx値及びy値を検出する。図6は、この検出結果の一例を示す表である。図6において、LED実装基板1〜5は、図1のLED実装基板200−1〜200−5に対応する(図7及び図8において同じ)。
【0081】
そして、撮像部110は、各画素に対応するx値及びy値を、パーソナルコンピュータ120の補正演算部122に送る。
【0082】
補正演算部122は、各画素に対応するx値及びy値等の情報に基づいて、LED実装基板200−1の測定点P(−2 −2)、P(−1 −2)、P(0 −2)、P(1 −2)、P(2 −2)を特定する。そして、特定された各測定点のうち、測定点P(−2 −2)、P(−1 −2)、P(1 −2)及びP(2 −2)のx値及びy値を、以下のようにして補正する。
【0083】
この補正演算において、補正演算部122は、まず、記憶部121から、対応する角度補正マトリクスを読み出す。ここでは、φ=−20゜に対応する角度補正マトリクスΔCa,ΔCbが読み出される。
【0084】
そして、下記の演算を行うことにより、測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)の補正演算が行われる。なお、下式において、x1,x2,x3,x4は測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)のx値、y1,y2,y3,y4は測定点P(0 −2)、P(0 −1)、P(0 1)、P(0 2)のy値である。
【0085】
このようにして、最上段のLED実装基板200−1の各測定点P(0 −2)〜P(0 2)に対する補正演算が終了する。
【0086】
これらの補正演算結果は、LED実装基板200−1の各測定点P(−2 −2)〜P(2 2)に対応するLED光源211を、基準放射角(すなわち、(φ,θ)=(0゜,−20゜)の方向)から測定したときのx値及びy値に相当する。従って、これらの補正演算結果を測定点間で比較することにより、x値及びy値の光特性ムラを正確に評価することができる。また、各測定点P(−2 −2)〜P(2 2)の撮像を同時に行うので、短時間で光り特性ムラの評価を行うことができる。
【0087】
次に、二番目以降のLED実装基板200−2〜200−5についても、LED光源211が順次点灯されて、LED実装基板200−1の場合と同様の撮像や補正演算処理等が行われる。図7は、このようにしてx値及びy値(図7参照)を補正した値の一例である。
【0088】
その後、各LED実装基板200−1〜200−5の補正後の光特性値について、基準となる放射角に対応する値(θ=0゜のときのx値及びy値)とその他の値との差をそれぞれ演算する。これにより、LED実装基板200−1〜200−5毎の、光特性ムラを評価することができる。図8は、この演算の結果を示す表である。
【0089】
この実施の形態では、水平方向放射角φ毎に角度補正マトリクスを作成するので、二番目以降のLED実装基板200−2〜200−5について撮像を行う時も、撮像部110の位置や角度を調整する必要が無い。従って、この実施の形態によれば、x値及びy値のムラ評価を、短時間で正確に行うことができる。
【0090】
また、全てのLED実装基板200−1〜200−5のLED光源211を同時に点灯させるのでは無く、1個ずつ順次点灯させて撮像することにより、光特性ムラ測定装置の電源容量を小さく抑えることができる。
【0091】
但し、全てのLED実装基板200−1〜200−5のLED光源211を同時に点灯させることとしても良い。更には、LED実装基板を所定本数(二本以上)ずつ順次点灯させることとしても良い。これらの場合には、測定時間を更に短縮することができる。
【0092】
更に、各LED実装基板200−1〜200−5毎に複数回ずつ撮像を行い、これら撮像で得られたx値及びy値の合計を補正演算部122で補正した結果を用いて、光特性ムラの評価を行っても良い。これにより、さらに信頼性の高い評価を行うことができる。
【0093】
本発明によれば、光特性値をXYZ表色系のx値及びy値としたので、人間の視覚に合わせた光特性ムラの測定を行うことができる。
【0094】
なお、この実施の形態では、LED照明器用LED実装基板の光特性ムラ評価に本発明を適用する場合を説明したが、これに限らず、光の放射、反射、透過等を行う装置であれば、そのような装置の光特性ムラ評価にも適用することができる。
【0095】
この実施の形態では、水平方向放射角φ及び鉛直方向放射角θを0゜、±10゜、±20゜としたが、これらの角度は任意である。但し、角度の間隔を細かくするほど、光特性ムラの精度を向上させることができる。
【0096】
この実施形態では、LED実装基板200−1〜200−5を横方向に並べて、縦方向の列毎に基準となる測定点を設け、該縦方向の列毎に光特性ムラを測定・評価することとしたが、横方向の列毎に光特性ムラを測定・評価してもよい。また、基準となる測定点を、複数列毎に設けることや、測定対象物200全体で1個のみ設けて、複数列単位或いは測定対象物200全体の光特性ムラを測定・評価することも可能である。
【0097】
この実施の形態では、XYZ表色系のx値及びy値を評価したが、本発明は、例えばRGB表色系の三原色や輝度等、他の光特性の評価にも適用できる。
【符号の説明】
【0098】
100 光特性ムラ測定装置
110 撮像部
120,427 パーソナルコンピュータ
121 記憶部
122 補正演算部
200 測定対象物
200−1〜200−5 LED実装基板
211 LED光源
400 配光測定装置
401 補正値測定用LED光源
410 光源支持部
411 水平回転ステージ
412,422 直立アーム
413 垂直回転ステージ
420 計測部
421 XYステージ
423 受光器
424 光ファイバ
425 分光器
426 信号線
【特許請求の範囲】
【請求項1】
測定対象物の表面に配列された複数の測定点を撮像して、該測定点から入射された光の特性値を検出する撮像部と、
前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを記憶する記憶部と、
前記補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算部と、
を有することを特徴とする光特性ムラ測定装置。
【請求項2】
前記補正用データは、
前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、
これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算する、
ことで生成されることを特徴とする請求項1に記載の光特性ムラ測定装置。
【請求項3】
いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することを特徴とする請求項2に記載の光特性ムラ測定装置。
【請求項4】
前記撮像部が、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像することを特徴とする請求項1乃至3の何れかに記載の光特性ムラ測定装置。
【請求項5】
前記撮像部が、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像することを特徴とする請求項4に記載の光特性ムラ測定装置。
【請求項6】
前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることを特徴とする請求項1乃至4の何れかに記載の光特性ムラ測定装置。
【請求項7】
測定対象物の表面に配列された複数の測定点を撮像部で撮像して、該測定点から入射された光の特性値を検出する撮像ステップと、
前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算ステップと、
を有する光特性ムラ測定方法。
【請求項8】
前記補正用データは、
前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、
これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算する、
ことで生成されることを特徴とする請求項7に記載の光特性ムラ測定方法。
【請求項9】
いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することを特徴とする請求項8に記載の光特性ムラ測定方法。
【請求項10】
前記撮像ステップが、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像するステップであることを特徴とする請求項7乃至9の何れかに記載の光特性ムラ測定方法。
【請求項11】
前記撮像ステップが、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像するステップであることを特徴とする請求項10に記載の光特性ムラ測定方法。
【請求項12】
前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることを特徴とする請求項7乃至11の何れかに記載の光特性ムラ測定方法。
【請求項1】
測定対象物の表面に配列された複数の測定点を撮像して、該測定点から入射された光の特性値を検出する撮像部と、
前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを記憶する記憶部と、
前記補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算部と、
を有することを特徴とする光特性ムラ測定装置。
【請求項2】
前記補正用データは、
前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、
これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算する、
ことで生成されることを特徴とする請求項1に記載の光特性ムラ測定装置。
【請求項3】
いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することを特徴とする請求項2に記載の光特性ムラ測定装置。
【請求項4】
前記撮像部が、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像することを特徴とする請求項1乃至3の何れかに記載の光特性ムラ測定装置。
【請求項5】
前記撮像部が、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像することを特徴とする請求項4に記載の光特性ムラ測定装置。
【請求項6】
前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることを特徴とする請求項1乃至4の何れかに記載の光特性ムラ測定装置。
【請求項7】
測定対象物の表面に配列された複数の測定点を撮像部で撮像して、該測定点から入射された光の特性値を検出する撮像ステップと、
前記測定点から前記撮像部へ入射される光の放射角に応じて定められた補正用データを用いて、それぞれの前記測定点に対応する前記特性値を、基準となる前記放射角に対応する値に補正する補正演算ステップと、
を有する光特性ムラ測定方法。
【請求項8】
前記補正用データは、
前記放射角を変化させながら配光測定用光源の前記特性値をそれぞれ測定し、
これら複数の測定結果を用いて、前記基準となる放射角における前記測定結果と他の放射角における前記測定結果との比をそれぞれ演算する、
ことで生成されることを特徴とする請求項7に記載の光特性ムラ測定方法。
【請求項9】
いずれか2個の前記測定点に対応する前記測定結果及び前記放射角を用いて、他のいずれかの前記測定点に対応する前記補正用データを演算することを特徴とする請求項8に記載の光特性ムラ測定方法。
【請求項10】
前記撮像ステップが、同一の前記測定対象物の同一列の全ての前記測定点を同時に撮像するステップであることを特徴とする請求項7乃至9の何れかに記載の光特性ムラ測定方法。
【請求項11】
前記撮像ステップが、前記測定対象物の前記測定点を、一列又は複数列分ずつ順次撮像するステップであることを特徴とする請求項10に記載の光特性ムラ測定方法。
【請求項12】
前記基準となる放射角が前記測定点の列毎に設けられ、当該列毎に前記特性値が補正されることを特徴とする請求項7乃至11の何れかに記載の光特性ムラ測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−113588(P2013−113588A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−256920(P2011−256920)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(504097591)株式会社オプトコム (1)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(504097591)株式会社オプトコム (1)
【Fターム(参考)】
[ Back to top ]