
光調節装置
【課題】光調節装置の上下基板に挟まれている移動体が傾いた状態で移動することを防ぎ、移動体を円滑に移動させることができる光調節装置を提供する。
【解決手段】開口部102、202を有する上下基板101、201と、上下基板101、201によって形成された空間を回動する移動体300と、移動体を回転軸中心に回動する駆動手段800と、を有する光調節装置900において、駆動手段800は移動体を少なくともパルス駆動することを特徴とする。
【解決手段】開口部102、202を有する上下基板101、201と、上下基板101、201によって形成された空間を回動する移動体300と、移動体を回転軸中心に回動する駆動手段800と、を有する光調節装置900において、駆動手段800は移動体を少なくともパルス駆動することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光調節装置に関するものである。
【背景技術】
【0002】
近年、撮像機能を有した携帯機器やマイクロビデオスコープ等の小型撮像機器の高画質化に伴い、レンズ、絞り、光学フィルター等の光学要素に固定焦点レンズ、固定開口絞り、固定特性フィルター、フォーカスレンズ、可変絞り、可変特性フィルター等を適用する要求が高まっている。そのため、小型撮像機器に適用する光学要素を小型化する構成として多くの提案がなされている。
【0003】
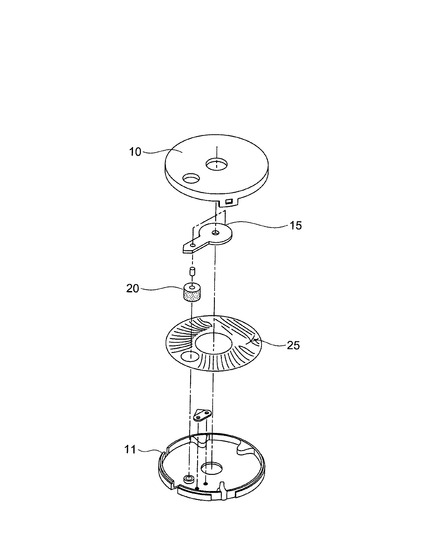
図10は、例えば、特許文献1に提案されている従来の光量調整装置の全体構成を示す分解斜視図である。基板を多層基板構造として大きな透磁率を有する物質の膜をコアとするコイルをプリント基板上に作成している。このように構成されたコイル体に、少なくとも二極以上に着磁した円筒形のローターをはめこみ、このローターに通過光量を調節する羽根部材を固定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−020360号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
さらに具体的に説明すると、特許文献1では、上下基板10、11に挟まれるように絞り羽根15が配置されている。絞り羽根15は、プリント基板上に形成したコイル25によって上下基板10、11に形成された隙間の中を移動する。ここで、絞り羽根15は必ずしも上下基板10、11に対して水平には移動せず、傾いた状態でも摩擦がかかりながら移動する場合もある。このような場合、発生する摩擦力により絞り羽根15が安定して動作しなくなるだけではなく、絞り羽根15が動作しない事態になることもありうる。
【0006】
本発明は、上記に鑑みてなされたものであって、上下基板に挟まれている移動体を安定して移動させることができる光調節装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明に係る光調節装置は、
開口部を有する上下基板と、
上下基板によって形成された空間を回動する移動体と、
移動体を回転軸中心に回動する駆動手段と、
を有する光調節装置において、
駆動手段は移動体を少なくともパルス駆動することを特徴とする。
【0008】
また、本発明の好ましい態様によれば、駆動手段は、
高周波電流を発生する高周波発生手段と、
所定の時間をあらかじめ記憶しておく記憶手段と、
タイマーと、
高周波発生手段、記憶手段、タイマーを制御する制御手段と、
から構成されることが望ましい。
【0009】
また、本発明の好ましい態様によれば、駆動手段は、
さらに、直流電流を発生する直流電流発生手段を有し、
制御手段は、直流電流発生手段に対して、高周波電流を印加して所定時間経過後に、直流電流を印加するよう制御することが望ましい。
【0010】
また、本発明の好ましい態様によれば、高周波電流は、移動体の駆動開始時に、所定の時間にわたって印加されることが望ましい。
【0011】
また、本発明の好ましい態様によれば、高周波電流と直流電流は、移動体が駆動開始する時、同時に印加されるとともに、高周波電流は、直流電流に、制御手段により重畳されて出力されることが望ましい。
【発明の効果】
【0012】
本発明にかかる光調節装置は、上下基板に挟まれている移動体を安定して移動させることができるという効果を奏する。
【図面の簡単な説明】
【0013】
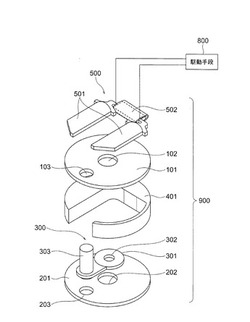
【図1】第1実施形態に係る光調節装置の分解斜視図及び光調節装置に駆動手段を接続した図である。
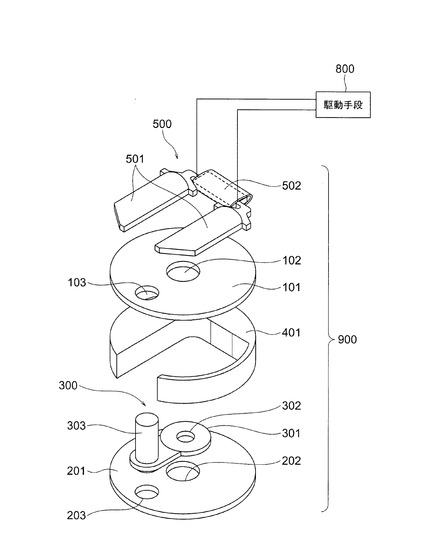
【図2】第1実施形態に係る光調節装置を組み立てた状態を示す斜視図及び光調節装置に駆動手段を接続した図である。
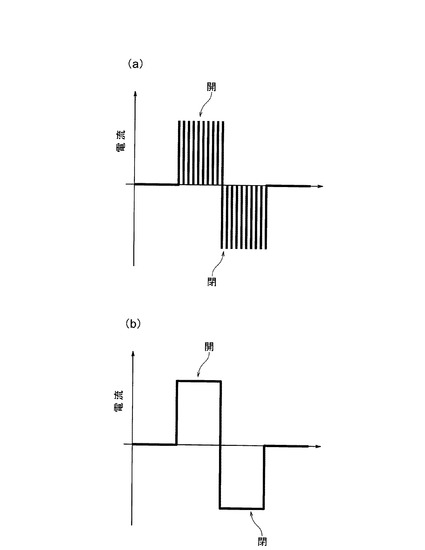
【図3】図3(a)は第1実施形態における駆動波形、(b)は従来技術における駆動波形を示す図である。
【図4】第1実施形態における駆動手段の操作を示すフローチャートである。
【図5】第2実施形態に係る光調節装置を組み立てた状態を示す斜視図及び光調節装置に駆動手段を接続した図である。
【図6】第2実施形態における駆動波形を示す図である。
【図7】第2実施形態における駆動手段の操作を示すフローチャートである。
【図8】第3実施形態における駆動波形を示す図である。
【図9】第3実施形態における駆動手段の操作を示すフローチャートである。
【図10】従来の光量調整装置の全体構成を示す分解斜視図である。
【発明を実施するための形態】
【0014】
以下に、本発明にかかる光調節装置の実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。
【実施例1】
【0015】
(第1実施形態)
第1実施の形態に係る光調節装置900について、図1を参照して説明する。図1は、光調節装置900の分解斜視図及び光調節装置900に駆動手段800を接続した図である。駆動手段800の詳細に関しては、後述する。
【0016】
光調節装置900は、基板101、基板201、移動体300、スペーサー401、電磁駆動源500から構成されている。基板101及び基板201は、それぞれ光学開口102、202と、回転軸穴103、203と、を有する。
【0017】
移動体300は、枠部材301、開口部302、回転軸部材303から構成されている。スペーサー401は、基板101と基板201との間に配置され、移動体300が動作可能となるスペースを作る。移動体300は、例えば絞り羽根である。また、電磁駆動源500は、ヨーク部材501に巻線コイル部502を設けたものである。また、駆動手段800は巻線コイル部502と接続し、移動体300を回動させる。
【0018】
図2は、第1実施形態に係る光調節装置900を組み立てた状態を示す斜視図及び光調節装置900に駆動手段800を接続した図である。移動体300の回転軸部材303は、回転軸穴103、203に支持されている。移動体300は基板101、基板201との間に配置される。
【0019】
電磁駆動源500は基板101上に配置され、駆動手段800に接続される。ヨーク部材501の先端部501a、501bは、磁性を有する回転軸部材303に対向する位置に配置される。そして、移動体300は回転軸部材303を中心に、駆動手段800により回転させることによって移動する。
【0020】
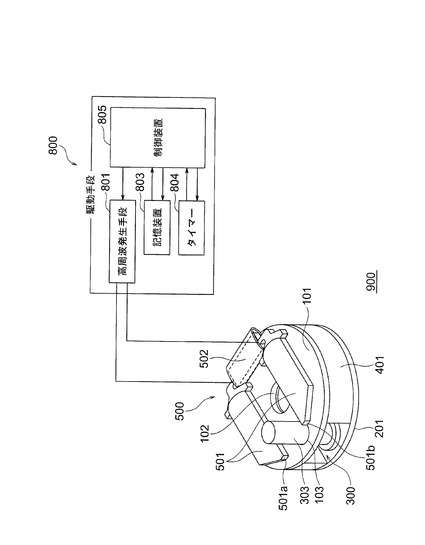
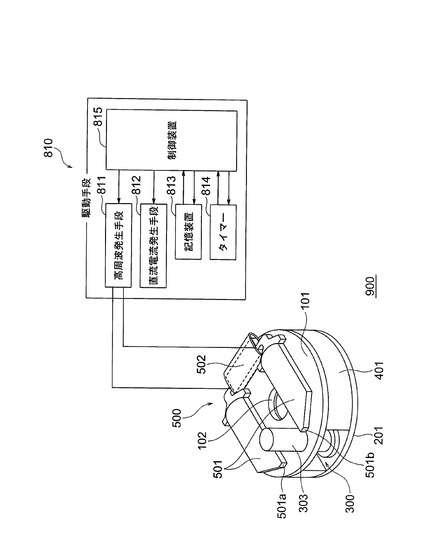
また、駆動手段800は、高周波電流を発生する高周波発生手段801と、所定の時間を記憶する記憶装置803と、所定の時間になるまで時間を計測するタイマー804と、これらを制御する制御手段805と、から構成されている。駆動手段800は、移動体300をパルス駆動する。
【0021】
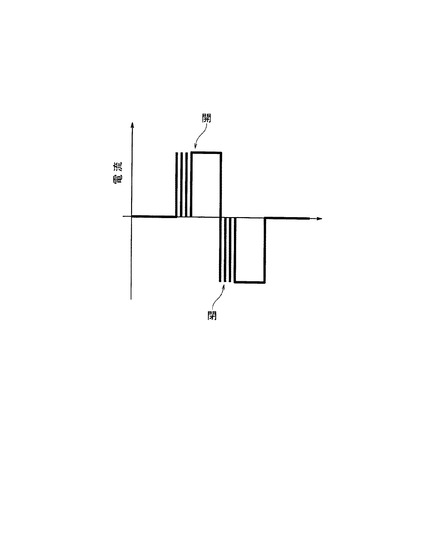
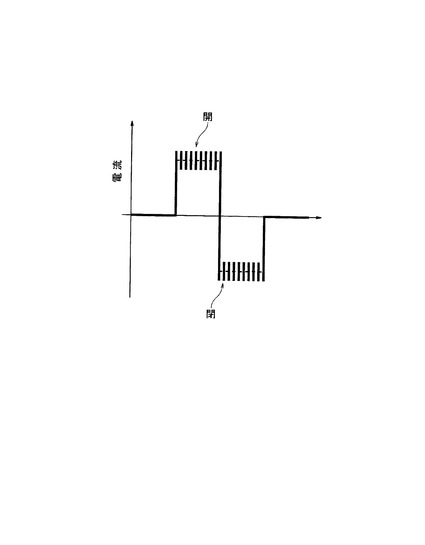
図3(a)は第1実施形態における駆動波形、図3(b)は従来技術における駆動波形を示している。図3(a)では、高周波電流を高周波発生手段801から巻線コイル502へ印加する。そのため、高周波電流が印加されると巻線コイル502から発生する磁場は振動的になり、これが回転軸部材303へ伝わる。
【0022】
このため、移動体300は周波数に対して開閉動作が追い付かない。特に、駆動開始直後は、移動体300は摩擦により、動きにくい状態にある。このため、移動体300は周波数に対して開閉動作が追い付かない。これにより、移動体300は振動的に移動することとなる。
さらに、駆動開始後であっても、駆動時の摩擦により、移動体300が傾きやすい。そのため、移動体300を振動的に移動させることで、移動をスムーズに行わせ、傾きにくくなる。
【0023】
つまり、移動体300が振動的に動くため、移動体300が傾いて移動しても振動により摩擦力が減少する。したがって、安定して動作することになる。
【0024】
一般的には、絞りの機構に例えば圧電素子などを設置し、外部から機械的な振動を与えることにより、同様の効果を得ることは考えられる。しかしながら、これでは絞り機構が大きくなってしまい、適用できない。
【0025】
これに対して、第1実施形態では、外部に特別な機構を使わずとも印加信号を高周波電流にすることで、同様の効果が得られ、絞り機構の小型化にも用いることができる。第1実施形態では移動体に用いているが、これに限らずフィルターあるいはその他の光学素子を切り換える用途にも適用可能である。ここで、第1実施形態において、正の高周波電流が印加されたときは移動体300が開く方向へ、負の高周波電流が印加されたときは移動体が閉まる方向へ移動する。
【0026】
図3(b)では、一般的に羽根を駆動する際、光調節装置に搭載されたコイルに直流電流を流して磁石に磁気力を発生させる。発生した磁気力に従って羽根は回転を開始する。つまり、正の電流を印加することで羽根は開く方向へ、負の電流を印加することで羽根を閉める方向へへ回転させる。図3(b)のように電流を印加する際、羽根が傾いていると上下基板の間に挟まれ、羽根が安定して動かない、羽根が動作しない、羽根が壊れる等の問題が発生する可能性がある。このため、図3(a)に示すように、移動体300に高周波電流を印加し、移動体300を振動的に動かすことで、上記問題の発生を防止できる。
【0027】
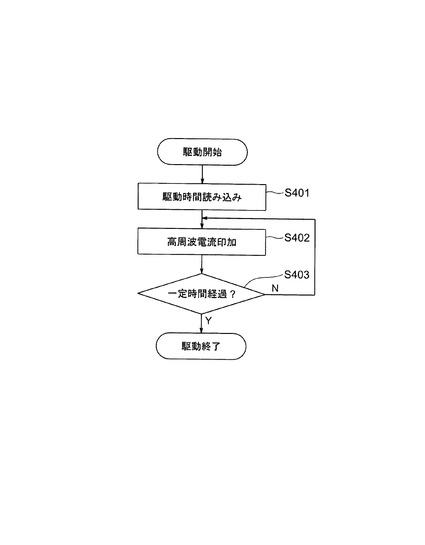
図4は第1実施形態における駆動手段800の操作をフローチャートに示したものである。駆動を開始すると、ステップS401において、記憶装置803にて高周波発生手段801から高周波電流を発生させる時間を読み込む。
【0028】
その後、タイマー804にて高周波電流を発生する時間を計測し、ステップS402において、一定時間、高周波発生手段801から高周波電流を印加する。これにより、移動体300は移動する。
【0029】
ステップS403において、タイマー804により、一定時間が経過したか否かが判断される。ステップS403の判断結果がYesの場合、駆動を終了する。ステップS403の判断結果がNoの場合、ステップS402へ戻り、処理を続ける。
【0030】
(第2実施形態)
図5を用いて、第2実施形態における駆動手段810について説明する。図5は、光調節装置900の組み立てた状態を示す斜視図及び光調節装置900に駆動手段810を接続した図である。
【0031】
第2実施形態では高周波発生手段811、記憶装置813、タイマー814の他に直流電流発生手段812を設けている。直流電流発生手段812は、直流電流を発生させる。ここで、光調節装置900、駆動手段810の高周波発生手段811、記憶装置813、タイマー814は、第1実施形態の光調節装置900、駆動装置800に用いられているものと同様のため、重複する説明は省略する。
【0032】
図6は第2実施形態における駆動波形を示したものである。駆動時の摩擦により、移動体300が傾きやすいのは駆動開始直後である。一旦移動体300の移動が開始されると、慣性力あるいは移動力が摩擦力にまさるため、移動はスムーズに行われる。
【0033】
したがって、図6に示すように、高周波電流を駆動開始直後の一定時間印加し、その後、直流電流を一定時間印加する。このようにすれば、駆動開始時の平均電流値より所定時間後の平均電流値が大きくなるので、より安定した動作が可能になる。
【0034】
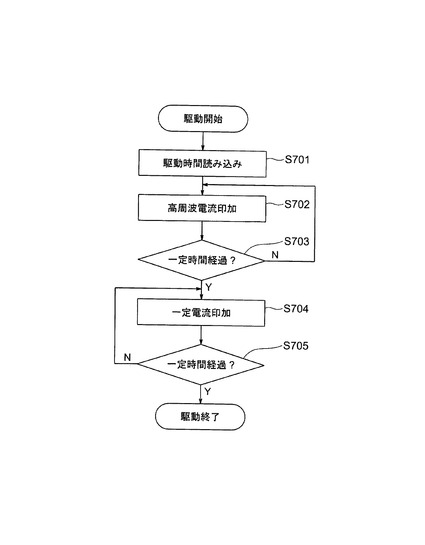
図7は第2実施形態における駆動手段810の操作をフローチャートに示したものである。駆動を開始すると、ステップS701において、記憶装置813にて高周波発生手段811から高周波電流を発生させる時間及び直流電流発生手段812から直流電流を発生させる時間を読み込む。
【0035】
ステップS702において、タイマー814にて高周波電流を発生させる時間を計測し、一定時間、高周波電流を発生させる。ステップS703において、タイマー814により、一定時間が経過したか否かが判断される。ステップS703の判断結果がYesの場合、ステップS704において、一定電流を印加する。
ステップS703の判断結果がNoの場合、ステップS702へ戻り、処理を続ける。
【0036】
ステップS705において、さらにタイマー814により、一定時間が経過したか否かが判断される。ステップS705の判断結果がYesの場合、駆動を終了する。
ステップS705の判断結果がNoの場合、ステップS704へ戻り処理を続ける。
【0037】
(第3実施形態)
図8を用いて、第3実施形態における駆動手段810について説明する。第3実施形態では、図5の駆動手段810を用い、高周波電流と直流電流の印加を同時におこない、かつ、直流電流に高周波電流を重畳させるものである。ここで、駆動手段810は第2実施形態にて用いた駆動手段810と同様のため、重複する説明は省略する。
【0038】
直流電流に高周波電流を重畳することで、高周波電流のみの場合に比べて、駆動時の平均電流は大きくなる。したがって、より安定した駆動が可能になる。第3実施形態では記載していないが、一定時間だけ直流電流に高周波電流を重畳させた信号を印加してもかまわない。
【0039】
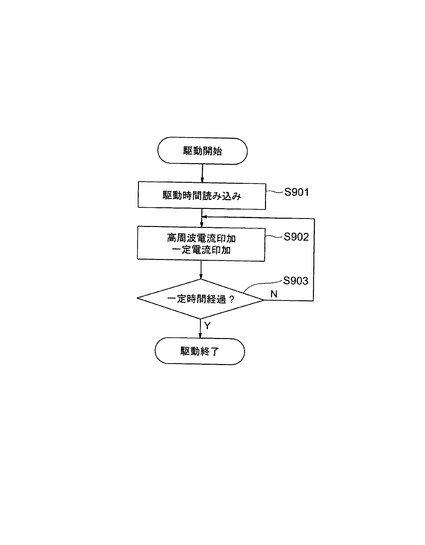
図9は、駆動手段810の操作をフローチャートに示したものである。駆動を開始すると、ステップS901において、記憶装置813にて高周波発生手段811から高周波電流を発生させる時間及び直流電流発生手段812から直流電流を発生させる時間を読み込む。
【0040】
ステップS902において、タイマー814にて高周波電流及び直流電流を発生させる時間を計測し、一定時間、高周波電流及び直流電流を発生させる。これにより、巻線コイル502に高周波電流及び直流電流が印加され、移動体300は移動する。
【0041】
ステップS903において、さらにタイマー814により、一定時間が経過したか否かが判断される。ステップS903の判断結果がYesの場合、駆動を終了する。
ステップS903の判断結果がNoの場合、ステップS902へ戻り処理を続ける。
【0042】
本発明は、その趣旨を逸脱しない範囲で様々な変形例をとることができる。
【産業上の利用可能性】
【0043】
以上のように、本発明にかかる光調節装置は、上下基板に挟まれている移動体が傾いた状態で移動することを防ぎ、移動体を円滑に移動させる光調節装置に有用である。
【符号の説明】
【0044】
101 基板
102 光学開口
103 回転軸穴
201 基板
202 光学開口
203 回転軸穴
300 移動体
301 枠部材
302 開口部
401 スペーサー
500 電磁駆動源
501 ヨーク部材
501a 先端部
501b 先端部
502 巻線コイル部
800 駆動手段
801 高周波発生手段
803 記憶装置
804 タイマー
805 制御装置
810 駆動手段
811 高周波発生手段
812 直流電流発生手段
813 記憶装置
814 タイマー
815 制御装置
900 光調節装置
【技術分野】
【0001】
本発明は、光調節装置に関するものである。
【背景技術】
【0002】
近年、撮像機能を有した携帯機器やマイクロビデオスコープ等の小型撮像機器の高画質化に伴い、レンズ、絞り、光学フィルター等の光学要素に固定焦点レンズ、固定開口絞り、固定特性フィルター、フォーカスレンズ、可変絞り、可変特性フィルター等を適用する要求が高まっている。そのため、小型撮像機器に適用する光学要素を小型化する構成として多くの提案がなされている。
【0003】
図10は、例えば、特許文献1に提案されている従来の光量調整装置の全体構成を示す分解斜視図である。基板を多層基板構造として大きな透磁率を有する物質の膜をコアとするコイルをプリント基板上に作成している。このように構成されたコイル体に、少なくとも二極以上に着磁した円筒形のローターをはめこみ、このローターに通過光量を調節する羽根部材を固定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−020360号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
さらに具体的に説明すると、特許文献1では、上下基板10、11に挟まれるように絞り羽根15が配置されている。絞り羽根15は、プリント基板上に形成したコイル25によって上下基板10、11に形成された隙間の中を移動する。ここで、絞り羽根15は必ずしも上下基板10、11に対して水平には移動せず、傾いた状態でも摩擦がかかりながら移動する場合もある。このような場合、発生する摩擦力により絞り羽根15が安定して動作しなくなるだけではなく、絞り羽根15が動作しない事態になることもありうる。
【0006】
本発明は、上記に鑑みてなされたものであって、上下基板に挟まれている移動体を安定して移動させることができる光調節装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明に係る光調節装置は、
開口部を有する上下基板と、
上下基板によって形成された空間を回動する移動体と、
移動体を回転軸中心に回動する駆動手段と、
を有する光調節装置において、
駆動手段は移動体を少なくともパルス駆動することを特徴とする。
【0008】
また、本発明の好ましい態様によれば、駆動手段は、
高周波電流を発生する高周波発生手段と、
所定の時間をあらかじめ記憶しておく記憶手段と、
タイマーと、
高周波発生手段、記憶手段、タイマーを制御する制御手段と、
から構成されることが望ましい。
【0009】
また、本発明の好ましい態様によれば、駆動手段は、
さらに、直流電流を発生する直流電流発生手段を有し、
制御手段は、直流電流発生手段に対して、高周波電流を印加して所定時間経過後に、直流電流を印加するよう制御することが望ましい。
【0010】
また、本発明の好ましい態様によれば、高周波電流は、移動体の駆動開始時に、所定の時間にわたって印加されることが望ましい。
【0011】
また、本発明の好ましい態様によれば、高周波電流と直流電流は、移動体が駆動開始する時、同時に印加されるとともに、高周波電流は、直流電流に、制御手段により重畳されて出力されることが望ましい。
【発明の効果】
【0012】
本発明にかかる光調節装置は、上下基板に挟まれている移動体を安定して移動させることができるという効果を奏する。
【図面の簡単な説明】
【0013】
【図1】第1実施形態に係る光調節装置の分解斜視図及び光調節装置に駆動手段を接続した図である。
【図2】第1実施形態に係る光調節装置を組み立てた状態を示す斜視図及び光調節装置に駆動手段を接続した図である。
【図3】図3(a)は第1実施形態における駆動波形、(b)は従来技術における駆動波形を示す図である。
【図4】第1実施形態における駆動手段の操作を示すフローチャートである。
【図5】第2実施形態に係る光調節装置を組み立てた状態を示す斜視図及び光調節装置に駆動手段を接続した図である。
【図6】第2実施形態における駆動波形を示す図である。
【図7】第2実施形態における駆動手段の操作を示すフローチャートである。
【図8】第3実施形態における駆動波形を示す図である。
【図9】第3実施形態における駆動手段の操作を示すフローチャートである。
【図10】従来の光量調整装置の全体構成を示す分解斜視図である。
【発明を実施するための形態】
【0014】
以下に、本発明にかかる光調節装置の実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。
【実施例1】
【0015】
(第1実施形態)
第1実施の形態に係る光調節装置900について、図1を参照して説明する。図1は、光調節装置900の分解斜視図及び光調節装置900に駆動手段800を接続した図である。駆動手段800の詳細に関しては、後述する。
【0016】
光調節装置900は、基板101、基板201、移動体300、スペーサー401、電磁駆動源500から構成されている。基板101及び基板201は、それぞれ光学開口102、202と、回転軸穴103、203と、を有する。
【0017】
移動体300は、枠部材301、開口部302、回転軸部材303から構成されている。スペーサー401は、基板101と基板201との間に配置され、移動体300が動作可能となるスペースを作る。移動体300は、例えば絞り羽根である。また、電磁駆動源500は、ヨーク部材501に巻線コイル部502を設けたものである。また、駆動手段800は巻線コイル部502と接続し、移動体300を回動させる。
【0018】
図2は、第1実施形態に係る光調節装置900を組み立てた状態を示す斜視図及び光調節装置900に駆動手段800を接続した図である。移動体300の回転軸部材303は、回転軸穴103、203に支持されている。移動体300は基板101、基板201との間に配置される。
【0019】
電磁駆動源500は基板101上に配置され、駆動手段800に接続される。ヨーク部材501の先端部501a、501bは、磁性を有する回転軸部材303に対向する位置に配置される。そして、移動体300は回転軸部材303を中心に、駆動手段800により回転させることによって移動する。
【0020】
また、駆動手段800は、高周波電流を発生する高周波発生手段801と、所定の時間を記憶する記憶装置803と、所定の時間になるまで時間を計測するタイマー804と、これらを制御する制御手段805と、から構成されている。駆動手段800は、移動体300をパルス駆動する。
【0021】
図3(a)は第1実施形態における駆動波形、図3(b)は従来技術における駆動波形を示している。図3(a)では、高周波電流を高周波発生手段801から巻線コイル502へ印加する。そのため、高周波電流が印加されると巻線コイル502から発生する磁場は振動的になり、これが回転軸部材303へ伝わる。
【0022】
このため、移動体300は周波数に対して開閉動作が追い付かない。特に、駆動開始直後は、移動体300は摩擦により、動きにくい状態にある。このため、移動体300は周波数に対して開閉動作が追い付かない。これにより、移動体300は振動的に移動することとなる。
さらに、駆動開始後であっても、駆動時の摩擦により、移動体300が傾きやすい。そのため、移動体300を振動的に移動させることで、移動をスムーズに行わせ、傾きにくくなる。
【0023】
つまり、移動体300が振動的に動くため、移動体300が傾いて移動しても振動により摩擦力が減少する。したがって、安定して動作することになる。
【0024】
一般的には、絞りの機構に例えば圧電素子などを設置し、外部から機械的な振動を与えることにより、同様の効果を得ることは考えられる。しかしながら、これでは絞り機構が大きくなってしまい、適用できない。
【0025】
これに対して、第1実施形態では、外部に特別な機構を使わずとも印加信号を高周波電流にすることで、同様の効果が得られ、絞り機構の小型化にも用いることができる。第1実施形態では移動体に用いているが、これに限らずフィルターあるいはその他の光学素子を切り換える用途にも適用可能である。ここで、第1実施形態において、正の高周波電流が印加されたときは移動体300が開く方向へ、負の高周波電流が印加されたときは移動体が閉まる方向へ移動する。
【0026】
図3(b)では、一般的に羽根を駆動する際、光調節装置に搭載されたコイルに直流電流を流して磁石に磁気力を発生させる。発生した磁気力に従って羽根は回転を開始する。つまり、正の電流を印加することで羽根は開く方向へ、負の電流を印加することで羽根を閉める方向へへ回転させる。図3(b)のように電流を印加する際、羽根が傾いていると上下基板の間に挟まれ、羽根が安定して動かない、羽根が動作しない、羽根が壊れる等の問題が発生する可能性がある。このため、図3(a)に示すように、移動体300に高周波電流を印加し、移動体300を振動的に動かすことで、上記問題の発生を防止できる。
【0027】
図4は第1実施形態における駆動手段800の操作をフローチャートに示したものである。駆動を開始すると、ステップS401において、記憶装置803にて高周波発生手段801から高周波電流を発生させる時間を読み込む。
【0028】
その後、タイマー804にて高周波電流を発生する時間を計測し、ステップS402において、一定時間、高周波発生手段801から高周波電流を印加する。これにより、移動体300は移動する。
【0029】
ステップS403において、タイマー804により、一定時間が経過したか否かが判断される。ステップS403の判断結果がYesの場合、駆動を終了する。ステップS403の判断結果がNoの場合、ステップS402へ戻り、処理を続ける。
【0030】
(第2実施形態)
図5を用いて、第2実施形態における駆動手段810について説明する。図5は、光調節装置900の組み立てた状態を示す斜視図及び光調節装置900に駆動手段810を接続した図である。
【0031】
第2実施形態では高周波発生手段811、記憶装置813、タイマー814の他に直流電流発生手段812を設けている。直流電流発生手段812は、直流電流を発生させる。ここで、光調節装置900、駆動手段810の高周波発生手段811、記憶装置813、タイマー814は、第1実施形態の光調節装置900、駆動装置800に用いられているものと同様のため、重複する説明は省略する。
【0032】
図6は第2実施形態における駆動波形を示したものである。駆動時の摩擦により、移動体300が傾きやすいのは駆動開始直後である。一旦移動体300の移動が開始されると、慣性力あるいは移動力が摩擦力にまさるため、移動はスムーズに行われる。
【0033】
したがって、図6に示すように、高周波電流を駆動開始直後の一定時間印加し、その後、直流電流を一定時間印加する。このようにすれば、駆動開始時の平均電流値より所定時間後の平均電流値が大きくなるので、より安定した動作が可能になる。
【0034】
図7は第2実施形態における駆動手段810の操作をフローチャートに示したものである。駆動を開始すると、ステップS701において、記憶装置813にて高周波発生手段811から高周波電流を発生させる時間及び直流電流発生手段812から直流電流を発生させる時間を読み込む。
【0035】
ステップS702において、タイマー814にて高周波電流を発生させる時間を計測し、一定時間、高周波電流を発生させる。ステップS703において、タイマー814により、一定時間が経過したか否かが判断される。ステップS703の判断結果がYesの場合、ステップS704において、一定電流を印加する。
ステップS703の判断結果がNoの場合、ステップS702へ戻り、処理を続ける。
【0036】
ステップS705において、さらにタイマー814により、一定時間が経過したか否かが判断される。ステップS705の判断結果がYesの場合、駆動を終了する。
ステップS705の判断結果がNoの場合、ステップS704へ戻り処理を続ける。
【0037】
(第3実施形態)
図8を用いて、第3実施形態における駆動手段810について説明する。第3実施形態では、図5の駆動手段810を用い、高周波電流と直流電流の印加を同時におこない、かつ、直流電流に高周波電流を重畳させるものである。ここで、駆動手段810は第2実施形態にて用いた駆動手段810と同様のため、重複する説明は省略する。
【0038】
直流電流に高周波電流を重畳することで、高周波電流のみの場合に比べて、駆動時の平均電流は大きくなる。したがって、より安定した駆動が可能になる。第3実施形態では記載していないが、一定時間だけ直流電流に高周波電流を重畳させた信号を印加してもかまわない。
【0039】
図9は、駆動手段810の操作をフローチャートに示したものである。駆動を開始すると、ステップS901において、記憶装置813にて高周波発生手段811から高周波電流を発生させる時間及び直流電流発生手段812から直流電流を発生させる時間を読み込む。
【0040】
ステップS902において、タイマー814にて高周波電流及び直流電流を発生させる時間を計測し、一定時間、高周波電流及び直流電流を発生させる。これにより、巻線コイル502に高周波電流及び直流電流が印加され、移動体300は移動する。
【0041】
ステップS903において、さらにタイマー814により、一定時間が経過したか否かが判断される。ステップS903の判断結果がYesの場合、駆動を終了する。
ステップS903の判断結果がNoの場合、ステップS902へ戻り処理を続ける。
【0042】
本発明は、その趣旨を逸脱しない範囲で様々な変形例をとることができる。
【産業上の利用可能性】
【0043】
以上のように、本発明にかかる光調節装置は、上下基板に挟まれている移動体が傾いた状態で移動することを防ぎ、移動体を円滑に移動させる光調節装置に有用である。
【符号の説明】
【0044】
101 基板
102 光学開口
103 回転軸穴
201 基板
202 光学開口
203 回転軸穴
300 移動体
301 枠部材
302 開口部
401 スペーサー
500 電磁駆動源
501 ヨーク部材
501a 先端部
501b 先端部
502 巻線コイル部
800 駆動手段
801 高周波発生手段
803 記憶装置
804 タイマー
805 制御装置
810 駆動手段
811 高周波発生手段
812 直流電流発生手段
813 記憶装置
814 タイマー
815 制御装置
900 光調節装置
【特許請求の範囲】
【請求項1】
開口部を有する上下基板と、
前記上下基板によって形成された空間を回動する移動体と、
前記移動体を回転軸中心に回動する駆動手段と、
を有する光調節装置において、
前記駆動手段は移動体を少なくともパルス駆動することを特徴とする光調節装置。
【請求項2】
前記駆動手段は、
高周波電流を発生する高周波発生手段と、
所定の時間をあらかじめ記憶しておく記憶手段と、
タイマーと、
前記高周波発生手段、前記記憶手段、前記タイマーを制御する制御手段と、
から構成されることを特徴とする請求項1に記載の光調節装置。
【請求項3】
前記駆動手段は、
さらに、直流電流を発生する直流電流発生手段を有し、
前記制御手段は、前記直流電流発生手段に対して、高周波電流を印加して前記所定時間経過後に、直流電流を印加するよう制御することを特徴とする請求項2に記載の光調節装置。
【請求項4】
前記高周波電流は、前記移動体の駆動開始時に、前記所定の時間にわたって印加されることを特徴とする請求項3に記載の光調節装置。
【請求項5】
前記高周波電流と前記直流電流は、前記移動体が駆動開始する時、同時に印加されるとともに、前記高周波電流は、前記直流電流に、前記制御手段により重畳されて出力されることを特徴とする請求項3に記載の光調節装置。
【請求項1】
開口部を有する上下基板と、
前記上下基板によって形成された空間を回動する移動体と、
前記移動体を回転軸中心に回動する駆動手段と、
を有する光調節装置において、
前記駆動手段は移動体を少なくともパルス駆動することを特徴とする光調節装置。
【請求項2】
前記駆動手段は、
高周波電流を発生する高周波発生手段と、
所定の時間をあらかじめ記憶しておく記憶手段と、
タイマーと、
前記高周波発生手段、前記記憶手段、前記タイマーを制御する制御手段と、
から構成されることを特徴とする請求項1に記載の光調節装置。
【請求項3】
前記駆動手段は、
さらに、直流電流を発生する直流電流発生手段を有し、
前記制御手段は、前記直流電流発生手段に対して、高周波電流を印加して前記所定時間経過後に、直流電流を印加するよう制御することを特徴とする請求項2に記載の光調節装置。
【請求項4】
前記高周波電流は、前記移動体の駆動開始時に、前記所定の時間にわたって印加されることを特徴とする請求項3に記載の光調節装置。
【請求項5】
前記高周波電流と前記直流電流は、前記移動体が駆動開始する時、同時に印加されるとともに、前記高周波電流は、前記直流電流に、前記制御手段により重畳されて出力されることを特徴とする請求項3に記載の光調節装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−145648(P2012−145648A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−2294(P2011−2294)
【出願日】平成23年1月7日(2011.1.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月7日(2011.1.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]