
光走査装置
【課題】投光タイミングのテーブルを予め複数記憶させる必要がなく、かつ、投光タイミングのテーブル生成待ちによる装置の停止を抑制する。
【解決手段】2軸回りに揺動可能に形成され光源部5からのレーザ光を二次元走査可能な光走査部2と、揺動用の各駆動信号の周波数の少なくとも一方を対応する軸回りの共振周波数に合わせ各駆動信号を出力する駆動部3と、投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部6と、一方の領域のテーブルで投光タイミングを指令する光源制御部7と、各共振周波数に対する駆動信号の周波数のずれ量の少なくとも一方を検出するずれ量検出部8と、ずれ量が第1閾値より大きい場合、テーブル生成を開始し他方の領域に記憶させるタイミングテーブル生成部9と、ずれ量が第2閾値より大きい場合、テーブル読込先を切替える切替部10及び各駆動周波数を変更する周波数変更部4とを備える。
【解決手段】2軸回りに揺動可能に形成され光源部5からのレーザ光を二次元走査可能な光走査部2と、揺動用の各駆動信号の周波数の少なくとも一方を対応する軸回りの共振周波数に合わせ各駆動信号を出力する駆動部3と、投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部6と、一方の領域のテーブルで投光タイミングを指令する光源制御部7と、各共振周波数に対する駆動信号の周波数のずれ量の少なくとも一方を検出するずれ量検出部8と、ずれ量が第1閾値より大きい場合、テーブル生成を開始し他方の領域に記憶させるタイミングテーブル生成部9と、ずれ量が第2閾値より大きい場合、テーブル読込先を切替える切替部10及び各駆動周波数を変更する周波数変更部4とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーザ光を対象領域内でリサージュ走査する光走査装置に関する。
【背景技術】
【0002】
従来から、レーザ光を対象領域内でリサージュ走査する光走査装置が知られている。この種の光走査装置としては、例えば、パルス状のレーザ光を予め設定された投光タイミングで投光する光源部と、二次元ガルバノミラーで構成される光走査部と、光走査部を駆動する駆動部とを備えて構成されたものがあり(例えば、特許文献1参照)、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する対象物までの距離を計測する光測距離装置や、レーザ走査型のプロジェクタ等の光走査手段として用いられている。
【0003】
この種の光走査装置において、駆動部は、例えば、二次元ガルバノミラーの各揺動方向の共振周波数と合わせて初期設定された駆動周波数で光走査部を駆動させている。ここで、例えば、光走査部の周辺温度が変化したり、光走査部自体の温度が変化したりすると共振周波数も変化する。この状態で、駆動周波数を変えずに光走査部を駆動させると、共振周波数とずれた状態で駆動させることになるため効率的でない。この共振周波数の温度変動対策として、この種の光走査装置においては、従来より、両方の揺動軸の駆動周波数をそれぞれの揺動軸の共振周波数に追従して変更して駆動制御したり、一方の揺動軸の駆動周波数については共振周波数に追従して変更し、他方の揺動軸の駆動周波数については一方の揺動軸の駆動周波数との比を維持しつつ変更したりして駆動制御を行っている。また、光源部から投光されるレーザ光の投光タイミングは、例えば、初期設定された駆動周波数に応じて定まるリサージュ走査軌跡に沿うレーザ光が、対象領域に予め定める各画素に照射可能に初期設定されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−175005号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の光走査装置において、初期設定された駆動周波数(初期値)と、温度に応じて変化する共振周波数に追従して変更された新たな駆動周波数との差が大きい場合や、初期設定された駆動周波数と、周波数比を維持しつつ変更された新たな駆動周波数との差が大きい場合、初期設定された投光タイミングでは意図する画素にレーザ光を照射することができなくなるおそれがあり、投光タイミングも変更せざるを得なくなる。この場合、例えば、共振周波数の変動し得る範囲を予め設定し、その変動範囲で予め定めた異なる複数の駆動周波数毎に投光タイミングのテーブルを予め記憶させておく構成としたり、温度に応じて変化する共振周波数に追従して新たな投光タイミングのテーブルを生成可能に構成したりすることが考えられる。
【0006】
しかしながら、予め複数の投光タイミングのテーブルを記憶させる構成の場合、投光タイミングのテーブルを記憶するメモリ容量が大きくなるためコストが上昇する。また、投光タイミングのテーブルを生成可能に構成する場合、投光タイミングのテーブル生成に要する演算は、駆動周波数の変更に要する演算と比較すると複雑であるため、投光タイミングのデータ生成時間は、駆動周波数の変更に要する演算時間と比較すると極めて長くなってしまう。その結果、駆動周波数は変更しているが、投光タイミングはその演算が完了していないため変更できていないという状態が発生するおそれがあるため、インターロックを作動させて装置を停止させなければならないという状態が発生するおそれがある。
【0007】
本発明は、このような課題に着目してなされたものであり、リサージュ走査による光走査装置において、投光タイミングのテーブルを予め複数用意させる必要がなく、かつ、投光タイミングのテーブル生成待ちによる装置の停止を抑制可能な光走査装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明による光走査装置は、光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、該可動部の揺動により前記光反射面に入射される光を対象領域内でリサージュ走査可能な光走査部と、前記可動部を前記第1軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び前記可動部を前記第2軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数の少なくとも一方を、対応する前記軸回りの共振周波数に合わせて設定し、前記第1駆動信号及び前記第2駆動信号を前記光走査部に出力して前記可動部を揺動させる駆動部と、前記光反射面に向かってパルス状のレーザ光を投光する光源部と、前記リサージュ走査されるレーザ光が前記対象領域に予め定める各画素に照射できるような前記レーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部と、前記2つの領域のいずれか一方に記憶されている前記テーブルを用いて前記投光タイミングを前記光源部に指令する光源制御部と、前記可動部が有する前記第1軸回りの第1共振周波数に対する前記第1駆動周波数のずれ量及び前記可動部が有する前記第2軸回りの第2共振周波数に対する前記第2駆動周波数のずれ量の少なくとも一方を検出するずれ量検出部と、前記ずれ量が予め定められた第1閾値よりも大きい場合に、新たな前記テーブルの生成用に前記第1駆動周波数及び前記第2駆動周波数について予めそれぞれ定める周波数に基づいて、前記新たなテーブルの生成を開始し、生成した前記新たなテーブルを前記記憶部の他方の前記領域に記憶させるタイミングテーブル生成部と、前記ずれ量が前記第1閾値より大きく予め定められた第2閾値よりも大きい場合に、前記光源制御部の投光タイミング指令用の前記テーブルの読込先を前記他方の領域に切替える切替部と、前記ずれ量が前記第2閾値よりも大きい場合に、前記第1駆動周波数及び前記第2駆動周波数の変更を行う周波数変更部と、を備えて構成する。
【発明の効果】
【0009】
本発明による光走査装置によれば、第1軸回りの第1共振周波数に対する第1駆動周波数のずれ量及び第2軸回りの第2共振周波数に対する第2駆動周波数のずれ量の少なくとも一方を検出し、ずれ量が予め定められた第1閾値よりも大きい場合に、新たなテーブルの生成用に各駆動周波数について予めそれぞれ定める周波数に基づいてテーブル生成を開始し、生成した新たなテーブルを記憶部の他方の領域に記憶させ、ずれ量が第1閾値より大きく予め定められた第2閾値よりも大きい場合に、光源制御部の投光タイミング指令用のテーブルの読込先を他方の領域に切替えると共に、各駆動周波数をそれぞれ変更する構成であるため、第1閾値と第2閾値の差を新たなテーブル生成に要する時間に対応した十分な値(差)になるように適切に設定するだけで、ずれ量が第1閾値より大きくなったときに開始したテーブル生成を、ずれ量が第2閾値に達するまでに完了させることができる。したがって、投光タイミングのテーブル切替と各駆動周波数の変更を同時に行うことができるので、初期設定された投光タイミングでは意図する画素にレーザ光を照射できない状況においても、投光タイミングのテーブル生成待ちによる装置停止を抑制することができる。また、投光タイミングのテーブルを予め複数記憶させる必要がない。
【図面の簡単な説明】
【0010】
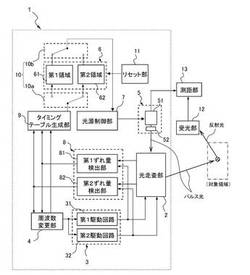
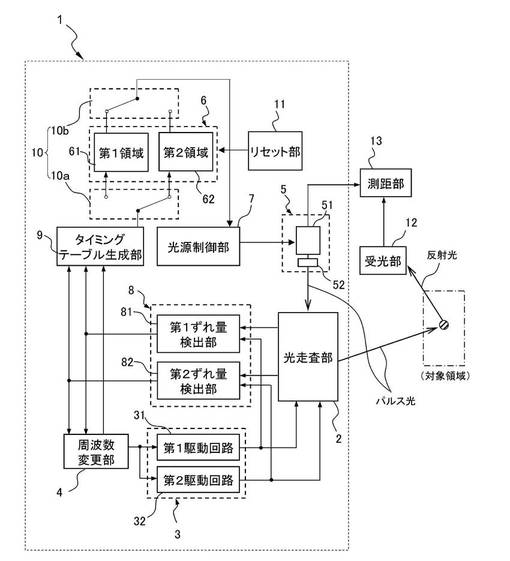
【図1】本発明による光走査装置の一実施形態の概略構成を示す図であり、光測距装置に適用した場合のブロック図である。
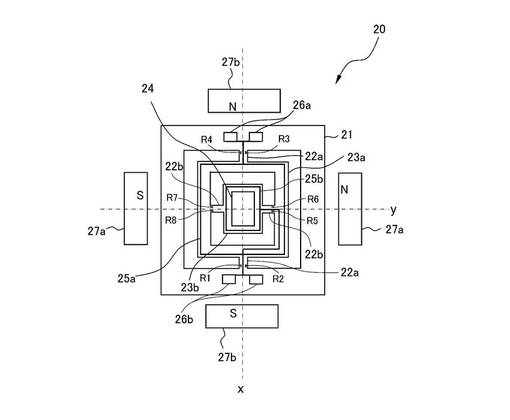
【図2】上記実施形態の光走査部の一例である二次元ガルバノミラーの構成を示す図である。
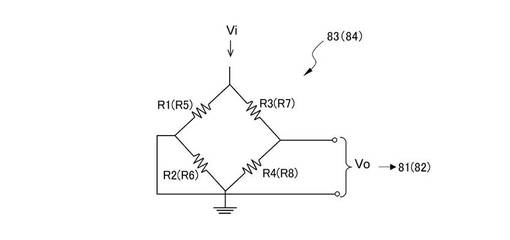
【図3】上記光走査部の揺動角度を検出するためのピエゾ抵抗素子で構成されたブリッジ回路を示す図である。
【図4】二次元ガルバノミラーの一般的な周波数特性を示す図である。
【図5】上記実施形態のずれ量検出部による第1ずれ量及び第2ずれ量の検出原理を説明するための図である。
【図6】上記実施形態における投光タイミングのテーブルの切替処理を示すフロー図である。
【図7】上記実施形態における投光タイミングのテーブル生成タスクの処理内容を示すフロー図である。
【図8】上記実施形態における各駆動周波数の変更処理を示すフロー図である。
【図9】上記光走査部の温度−共振周波数テーブルの一例を示す図である。
【図10】二次元ガルバノミラーの別の周波数特性を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本発明による光走査装置の一実施形態の概略構成を示すブロック図である。
この光走査装置1は、パルス状のレーザ光を対象領域内でリサージュ走査するものである。以下の説明では、光走査装置1を、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する物体までの距離を計測する光測距装置の光走査手段として用いる場合で説明する。
【0012】
本実施形態による光走査装置1は、電磁駆動型の光走査部2と、光走査部2に駆動信号を入力し揺動駆動する駆動部3と、駆動信号の周波数を変更する周波数変更部4と、パルス状のレーザ光を投光する光源部5と、レーザ光の投光タイミングのテーブルを記憶する記憶部6と、レーザ光の投光タイミングを光源部5に指令する光源制御部7と、光走査部2の共振周波数に対する駆動信号の周波数のずれ量を検出するずれ量検出部8と、新たな投光タイミングのテーブルを生成するタイミングテーブル生成部9と、第1切替部10a及び第2切替部10bを有する切替部10と、リセット部11とを備える。
【0013】
前記光走査部2は、光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、可動部の揺動することによって、光反射面への入射光を対象領域内でリサージュ走査可能に構成されたものである。このような光走査部2としては、例えば、本出願人により提案された特許第2722314号公報に記載の二次元走査型の半導体ガルバノミラー(以下単に「二次元ガルバノミラー」という)を用いることができる。
【0014】
図2は、光走査部2の具体例としての二次元ガルバノミラー20の構成を示している。
この二次元ガルバノミラー20は、枠状の固定部21と、固定部21の内側に配置され一対の第1トーションバー22a,22aによって揺動可能に支持された外側可動部23aと、外側可動部23aの内側に配置され第1トーションバー22a,22aに軸方向が直交する一対の第2トーションバー22b,22bによって揺動可能に支持された内側可動部23bと、を備える。ここで、第1トーションバー22a,22aの中心軸をx軸(第1軸)とし、第2トーションバー22b,22bの中心軸をy軸(第2軸)とする。
【0015】
内側可動部23bの中央部には光反射面(ミラー)24が形成され、各可動部23a,23bの周縁部にはそれぞれ第1駆動コイル25a,第2駆動コイル25bが形成されている。第1駆動コイル25aの端部は、固定部21に形成された第1電極端子26a,26aに接続され、第2駆動コイル25bの端部は、固定部21に形成された第2電極端子26b,26bに接続されている。また、第1駆動コイル25aに磁界を作用させる一対の第1永久磁石27a,27a及び第2駆動コイル25bに磁界を作用させる一対の第2永久磁石27b,27bが固定部21を挟んでそれぞれ対向配置されている。
【0016】
二次元ガルバノミラー20は、各駆動コイル25a,25bに流れる電流(例えば、交流電流)と、第1永久磁石27a,27a及び第2永久磁石27b,27bによる磁界とによって各可動部23a,23bにローレンツ力が作用する。その結果、内側可動部23bが二次元方向に揺動し、光反射面24に入射されるレーザ光が対象領域内でリサージュ走査される。なお、以下の説明において、外側可動部23a及び内側可動部23bを含む可動部全体のx軸回りの共振周波数を「第1共振周波数」といい、内側可動部23bのy軸回りの共振周波数を「第2共振周波数」という。
【0017】
図1に戻って、前記駆動部3は、光走査部2を揺動駆動するものであり、例えば、第1駆動回路部31、第2駆動回路部32を備えて構成されている。本実施形態においては、駆動部3は、外側可動部23a及び内側可動部23bをx軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び内側可動部23bをy軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数を、対応する軸回りの共振周波数に合わせてそれぞれ設定し、第1駆動信号及び第2駆動信号を光走査部2に出力して外側可動部23a及び内側可動部23bを揺動させる構成である。
【0018】
前記第1駆動回路31は、第1駆動信号(例えば、交流電流)を第1共振周波数に合わせて設定された第1駆動周波数で、第1電極端子26a,26aを介して第1駆動コイル25aに供給する。同様に、前記第2駆動回路32は、第2駆動信号(例えば、交流電流)を第2共振周波数に合わせて設定された第2駆動周波数で、第2電極端子26b,26bを介して第2駆動コイル25bに供給する。第1駆動周波数及び第2駆動周波数は、例えば、初期状態における光走査部2の各共振周波数にそれぞれ合わせて初期設定されており、後述するように周波数変更部4からの指令によって変更可能に構成されている。
【0019】
なお、本実施形態において、二次元ガルバノミラー20の後述する図5に示す駆動周波数に対する位相差の特性は、位相差が−90°で駆動周波数が共振周波数(図5においては1300Hz)と一致する点を対称点とした点対称な特性を示すものとする。
【0020】
前記周波数変更部4は、ずれ量検出部8の検出結果に基づいて第1駆動周波数及び第2駆動周波数を変更するものであり、本実施形態においては、後述するようにずれ量検出手段8から、第1駆動周波数に対する第1共振周波数のずれ量である第1ずれ量のデータと、第2駆動周波数に対する第2共振周波数のずれ量である第2ずれ量のデータとが入力されるように構成されている。また、第1駆動周波数及び第2駆動周波数のいずれか一方のずれ量について、大小2つの閾値が予め定められている。本実施形態においては、第2ずれ量について大小2つの閾値が予め設定されており、以下の説明において、第2ずれ量についての小さい方の閾値を第1閾値、大きい方の閾値を第2閾値と言う。
【0021】
周波数変更部4は、ずれ量(すなわち、本実施形態においては第2ずれ量)が第2閾値よりも大きい場合に、第1駆動周波数及び第2駆動周波数を変更する。周波数変更部4は、具体的には、第1駆動周波数を実際の第1共振周波数に合わせ、第2駆動周波数を実際の第2共振周波数に合わせて、各駆動周波数の変更を行う。周波数変更部4は、例えば、各駆動回路31,32が出力している各駆動信号の駆動周波数に第1ずれ量及び第2ずれ量をそれぞれ加算又は減算することにより、実際の各共振周波数を演算し、各駆動周波数をこの演算した各共振周波数に合わせて変更するように各駆動回路31,32に指令する。なお、各ずれ量を加算するか減算するかの判断は、例えば、ずれ量検出手段8が検出する後述する位相差の値によって判断する。
【0022】
前記第2閾値は、各駆動周波数の変更を行うトリガーとして用いられると共に、後述するように投光タイミングの変更(切替)を行うトリガーとしても用いられる。ここで、各駆動周波数を実際の共振周波数に合わせて変更する場合、新たな各駆動周波数と初期設定等された変更前の各駆動周波数との差が大きいと、対象領域内でのレーザ光の走査軌跡が大きく変化するため、この状態で、投光タイミングを変更しないでレーザ光を照射すると、意図する画素内にレーザ光を照射することができなくなるおそれがある。そこで、第2閾値は、温度変動により各共振周波数が変動する状況下において、各駆動周波数と投光タイミングを変更しないでも、意図する画素内にレーザ光を照射可能な限界値(例えば、数Hz)に応じて適切に設定されている。また、上記第1閾値は、第2閾値より小さくなるように設定されており、後述するように第2閾値との差が、新たな投光タイミングのデータ生成に要する時間に応じた十分な値(差)になるように適切に設定されている。
【0023】
前記光源部5は、光走査部2の光反射面24に向かってパルス状のレーザ光を投光するものであり、例えば、光源51と投光光学系52とを含む。光源部5が投光するレーザ光の投光タイミングは光源制御部7によって指令される。光源51は、例えばレーザダイオードであり、光源制御部7からの指令によって発光してパルス状のレーザ光を出射する。投光光学系52は、例えばコリメータレンズを含み、光源51が発したレーザ光を平行光に変換する。そして、光源部5から投光されたレーザ光は、光走査部2の光反射面24で反射されて対象領域内をリサージュ走査される。光反射面24で反射走査されたレーザ光が対象領域内に存在する物体によって反射されたレーザ光(反射光)は、例えば、光測距装置の受光部12(例えば、フォトセンサ)で受光される。そして、この受光部12による反射光の受光タイミングと光源制御部7によるレーザ光の投光タイミングは光測距装置の測距部13に入力される。これにより、光測距装置の測距部13は、入力された投光タイミングと受光タイミングとの時間差に基づいて対象領域内に存在する物体までの距離を計測する。このようにして、本実施形態による光走査装置1は、光測距装置の光走査手段として用いられる。
【0024】
前記記憶部6は、リサージュ走査されるレーザ光が対象領域に予め定める各画素に照射できるようなレーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有するものであり、この2つの領域として第1領域61と第2領域62を備えて構成する。例えば、初期状態において、第1領域61は、後述するように初期設定された投光タイミングのテーブルを記憶し、第2切替部10bを介して光源制御部7と接続されており、第2領域62は、第1切替部10aを介してタイミングテーブル生成部9と接続されており、後述するようにタイミングテーブル生成部9において生成された新たな投光タイミングのテーブルを記憶可能に構成されている。
【0025】
前記光源制御部7は、第1領域61及び第2領域62のいずれか一方に記憶されているテーブルを用いて投光タイミングを光源部5に指令するものであり、第2切替部10bを介して第1領域61及び第2領域62のいずれか一方と接続されている。投光タイミングは、例えば、初期状態における光走査部2の各共振周波数にそれぞれ合わせて初期設定された各駆動周波数に応じて定まるリサージュ走査軌跡に沿って走査されるレーザ光が対象領域に予め定める各画素に照射可能に初期設定されている。光源制御部7は、初期状態において、例えば、第2切替部10bを介して第1領域61と接続されており、第1領域61に記憶されている投光タイミングのテーブル(初期データ)を読込んで光源部5に投光タイミングを指令するように構成されている。
【0026】
前記ずれ量検出部8は、第1共振周波数に対する第1駆動周波数のずれ量である第1ずれ量及び第2共振周波数に対する第2駆動周波数のずれ量である第2ずれ量の少なくとも一方を検出するものである。本実施形態において、ずれ量検出部8は、第1ずれ量及び第2ずれ量を検出し、例えば、第1ずれ量検出部81と、第2ずれ量検出部82と、図3に示す第1ブリッジ回路83及び第2ブリッジ回路84とを備えて構成される。
【0027】
前記第1ずれ量検出部81は、例えば、第1駆動回路31から出力された第1駆動信号と第1ブリッジ回路83の出力信号(x軸回りの揺動角度信号)との位相差に基づいて上記第1ずれ量を検出する。同様に、前記第2ずれ量検出部82は、例えば、第2駆動回路32から出力された第2駆動信号と上記第2ブリッジ回路84の出力信号(y軸回りの揺動角度信号)との位相差に基づいて第2ずれ量を検出する。
【0028】
前記第1ブリッジ回路83は、例えば、P型拡散抵抗によって、図2に示すように、第1トーションバー22a,22aの固定部21の根元近傍に形成された第1〜第4ピエゾ抵抗素子R1〜R4を備えて構成されており、x軸回りの揺動動作(捩れ)によって生じる引張歪み及び圧縮歪みを検出する。そして、第1〜第4ピエゾ抵抗素子R1〜R4は、図3に示すように、配線によって接続されてブリッジ回路(入力電圧Vi,出力電圧Vo)を構成する。同様に、前記第2ブリッジ回路84は、例えばP型拡散抵抗によって、第2トーションバー22b,22bの外側可動部23a側の根元近傍に形成された第5〜第8ピエゾ抵抗素子R5〜R8を備えて構成されており、y軸回りの揺動動作(捩れ)によって生じる引張歪み及び圧縮歪みを検出する。第5〜第8ピエゾ抵抗素子R5〜R8は、図3に示すようにブリッジ回路(入力電圧Vi,出力電圧Vo)を構成する。
【0029】
例えば、外側可動部23a及び内側可動部23bがx軸回りの一方に傾斜すると、第1,4ピエゾ抵抗素子R1,R4は引張応力を受けるとともに第2,3ピエゾ抵抗素子R2,R3は圧縮応力を受け、外側可動部23a及び内側可動部23bがx軸回りの他方に傾斜すると、各ピエゾ抵抗素子R1〜R4はそれぞれ上記と逆の応力を受ける。P型拡散抵抗によって形成された第1〜第4ピエゾ抵抗素子R1〜R4は、引張応力を受けると抵抗値が増加し、圧縮応力を受けると抵抗値が減少する。このため、第1ブリッジ回路83からはx軸回りの揺動角度(振れ角)に応じた電圧が正弦波として出力される。この出力電圧Voを第1ずれ量検出部81でモニタすることでx軸回りの揺動角度を連続的に検出することができる。同様に、第2ブリッジ回路84からの出力電圧Voを第2ずれ量検出部82でモニタすることでy軸回りの揺動角度を連続的に検出することができる。
【0030】
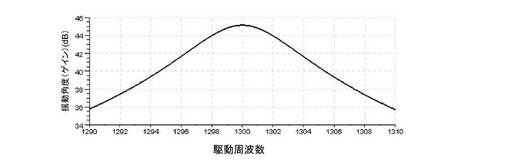
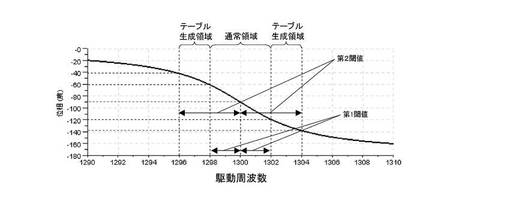
ここで、ずれ量検出部8によるずれ量の検出原理について図4及び図5を用いて簡単に説明する。図4及び図5は、共にガルバノミラーの周波数特性を示す図であり、図4は、駆動周波数に対するミラーの揺動角度(ゲイン)を示し、図5は、駆動周波数に対する駆動信号とミラーの揺動角度(信号)との位相差を示している。
【0031】
図5に示すように、ガルバノミラーがその共振周波数(ここでは1300Hz)と同一の周波数を有する駆動信号で駆動されると、駆動信号の位相に対してミラーの揺動角度(信号)の位相は90°遅れ、駆動信号と揺動角度信号との間には90°の位相差が発生する。すなわち、駆動信号とミラーの揺動角度信号との位相差が90°でない場合には、駆動周波数とガルバノミラーの共振周波数とが一致していない、換言すれば、温度変化によって図4及び図5に示すガルバノミラーの周波数特性(共振周波数)がシフトしていると考えることができる。ガルバノミラーの周波数特性は予め取得しておくことが可能であるから、駆動信号と揺動角度信号との位相差を検出することで、駆動周波数と実際のガルバノミラーの共振周波数とのずれ量(共振周波数のシフト量)を把握することができる。
【0032】
上記の検出原理を利用することで、第1ずれ量検出部81は、光走査部2のx軸回りの周波数特性に基づいて第1ずれ量を検出することができ、第2ずれ量検出部82は、光走査部2のy軸回りの周波数特性に基づいて第2ずれ量を検出することができる。具体的には、第1ずれ量検出部81は、光走査部2のx軸回りについて図5に対応する駆動周波数−位相差特性の情報(テーブル等)を有しており、第1駆動信号と第1ブリッジ回路83の出力信号(揺動角度信号)との位相差から第1ずれ量(第1共振周波数のシフト量)を検出する。同様に、第2ずれ量検出部82は、y軸回りについて駆動周波数−位相差特性の情報を有し、第2駆動信号と第2ブリッジ回路84の出力信号との位相差から第2ずれ量(第2共振周波数のシフト量)を検出する。
【0033】
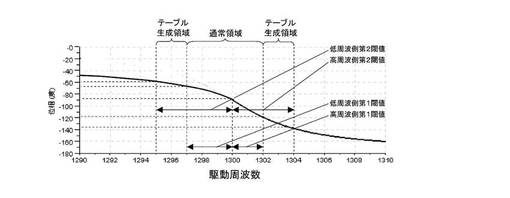
前記タイミングテーブル生成部9は、例えば、ずれ量検出部8からずれ量の検出結果のデータが入力されるように構成されており、本実施形態においては第2ずれ量が予め定められた第1閾値よりも大きい場合に、すなわち、図5に示す通常使用領域を超えたときに、新たなテーブルの生成を開始し、生成した新たなテーブルを記憶部6の他方の領域(例えば、第2領域62)に記憶させる。新たなテーブルの生成は、新たなテーブル生成用に第1駆動周波数について予め定める周波数(以下において、「テーブル生成用第1周波数」と言う)と、新たなテーブル生成用に第2駆動周波数について予め定める周波数(以下において、「テーブル生成用第2周波数」と言う)とに基づいて行うように構成されている。
【0034】
タイミングテーブル生成部9は、具体的には、例えば、周波数変更部4等から現在の第2駆動周波数の情報を読込み、その第2駆動周波数に第2閾値を加算又は減算することによって、テーブル生成用第2周波数を、例えば、投光タイミングのテーブルの計算開始前に予め定めることができる。このテーブル生成用第2周波数は、第2ずれ量が第2閾値と一致したときの実際の第2共振周波数と一致する。タイミングテーブル生成部9は、例えば、温度に応じてそれぞれ変化する第2共振周波数と第1共振周波数を対応付けた「第1共振周波数−第2共振周波数テーブル」を予め有しており、第2駆動周波数と第2閾値から求めた第2共振周波数(すなわち、テーブル生成用第2周波数)と対応する第1共振周波数を、この「第1共振周波数−第2共振周波数テーブル」に基づいて求め、この第1共振周波数をテーブル生成用第1周波数として予め定める。このようにして、タイミングテーブル生成部9は、第2ずれ量が第1閾値よりも大きくなったときに、第2ずれ量が第2閾値と一致するときの各共振周波数にそれぞれ一致するテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始する。なお、テーブル生成用第2周波数を予め定める際に、第2閾値を加算するか減算するかの判断は、例えば、ずれ量検出手段8が検出する位相差の値によって判断する。また、タイミングテーブル生成部9は、例えば、初期状態においては、第2領域62に接続されており、新たな投光タイミングのテーブル生成が完了するとそのデータを第2領域62に出力して記憶させる。
【0035】
ここで、上記第1閾値は、第2閾値より小さく、かつ、第2閾値との差が新たな投光タイミングのテーブル生成に要する時間(数秒)に対応した十分な値(差)、例えば、2Hz程度になるように、適切に設定されている。これにより、第2ずれ量が第1閾値より大きくなったときに開始した新たなテーブル生成を、第2ずれ量が第2閾値に達するまでに(すなわち、図5に示すテーブル生成領域内で)完了させることができる。なお、第1閾値と第2閾値との差は、一例として2Hzとしたが、これに限らず、温度変動による各共振周波数の変動特性や走査部2の周辺の温度の変動状況等に基づいて適宜設定される。
【0036】
前記切替部10は、ずれ量(すなわち、本実施形態においては第2ずれ量)が第2閾値よりも大きい場合に、光源制御部7の投光タイミング指令用のテーブルの読込先を他方の領域に(例えば、第2領域62)に切替えるものであり、例えば、第1切替部10aと第2切替部10bとを備えて構成する。
【0037】
前記第1切替部10aは、タイミングテーブル生成部9を記憶部6の第1領域61及び第2領域62のいずれか一方と切替可能に接続するものであり、例えば、初期状態においては、タイミングテーブル生成部9を第2領域62に接続させており、タイミングテーブル生成部9が新たなテーブル生成を完了させるとそのデータを第2領域62に出力可能にしている。第1切替部10aは、例えば、第2切替部10bの切替動作と同期してタイミングテーブル生成部9の接続先を切替えるように構成されている。第1切替部10aは、例えば、後述するように第2切替部10bが光源制御部7の接続先を第1領域61から第2領域62に切替えるとき、タイミングテーブル生成部9の接続先を第2領域62から第1領域61に切替える。これにより、光源制御部7が光源部4への投光タイミング指令用にアクセスしている領域に、次に生成される別の投光タイミングのテーブルを上書きしないようにする。
【0038】
前記第2切替部10bは、光源制御部7を記憶部6の第1領域61及び第2領域62のいずれか一方と切替可能に接続するものであり、例えば、初期状態においては、光源制御部7を第1領域61に接続させている。第2切替部10bは、第2ずれ量が第2閾値よりも大きくなった場合、例えば、接続先を切替える指令をタイミングテーブル生成部9等から受けることで、光源制御部7の接続先を第1領域61から第2領域62に切替える。これにより、光源制御部7は新たなテーブルを読込んで光源部5に新たな投光タイミングを指令する。このようにして、投光タイミングを瞬間的に切替えることができる。
【0039】
前記リセット部11は、記憶部6が新たな投光タイミングのテーブルを他方の領域(すなわち、本実施形態において、新たなテーブルが始めて生成された場合であれば、第2領域62)に記憶している場合に、ずれ量検出手段8の検出結果に基づいて新たなテーブルを消去するように構成されている。リセット部11は、具体的には、新たなテーブル生成が完了し、そのテーブルが記憶されているにも関わらず、第2ずれ量が第1閾値以下になった場合(後述する図6に示すステップS9:YES)に、新たなテーブルを記憶保持する必要がないと判定しそのテーブルのデータを消去(リセット)する。これにより、無駄なデータの記憶保持をさせないようにすることができる。
【0040】
次に、以上のような構成を有する光走査装置1の投光タイミングの切替動作及び各駆動周波数の変更動作について、図1,図6〜図8に基づいてそれぞれ説明する。
【0041】
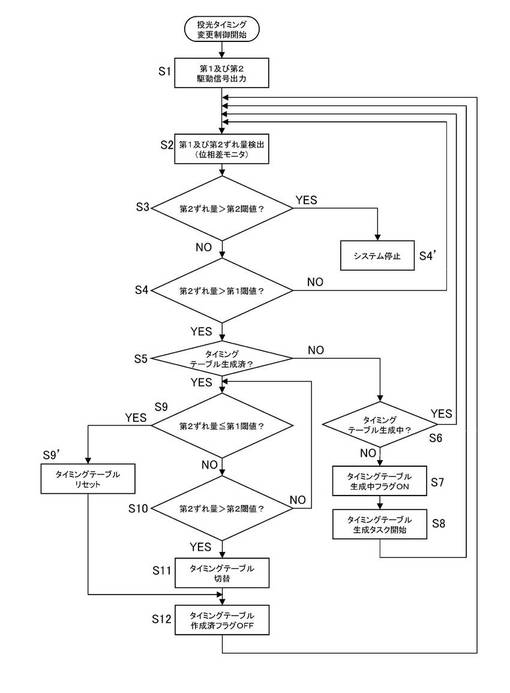
まず、図6及び図7に基づいて、投光タイミングの切替動作について説明する。
図6に示すように、ステップS1において、駆動部3は、各駆動信号をそれぞれの駆動周波数で出力する。この際、周波数変更部4は、現在の駆動周波数の情報をタイミングテーブル生成部9に出力する。
【0042】
ステップS2において、第1ずれ量検出部81は、第1駆動信号と第1ブリッジ回路83の出力信号との位相差に基づいて第1ずれ量を検出し、第2ずれ量検出部82は、第2駆動信号と第2ブリッジ回路84の出力信号との位相差に基づいて第2ずれ量を検出する。そして、各ずれ量の検出結果及び各位相差は、タイミングテーブル生成部9及び周波数変更部4に出力される。この各位相差は、後述するステップS81,S23において、各共振周波数のシフト方向の判定に利用される。
【0043】
ステップS3において、タイミングテーブル生成部9は、入力された第2ずれ量が第2閾値よりも大きいか否かを判定する。第2ずれ量が第2閾値より大きくない場合は、ステップS4に進む。
【0044】
ステップS4において、タイミングテーブル生成部9は、入力された第2ずれ量が第1閾値よりも大きいか否かを判定する。第2ずれ量が第1閾値より大きくなった場合は、ステップS5に進む。第2ずれ量が第1閾値より大きくない場合は、ステップS2に戻る。
【0045】
ステップS5において、タイミングテーブル生成部9は、新たな投光タイミングのデータ(以下において、「タイミングテーブル」と言う)を生成済であるか否かを判定する。この判定は、タイミングテーブル生成済フラグがONされているか否かで判定する。タイミングテーブル生成済フラグがONされていないと判定した場合(すなわち、生成済でない場合)は、ステップS6に進む。このタイミングテーブル生成済フラグは、後述するステップS85でONされ,ステップS12でOFFされる。
【0046】
ステップS6において、タイミングテーブル生成部9は、新たなタイミングテーブルを生成中であるか否かを判定する。この判定は、タイミングテーブル生成中フラグがONされているか否かで判定する。タイミングテーブル生成中フラグがONされていると判定した場合(すなわち、生成中の場合)は、ステップS2に戻り、タイミングテーブル生成中フラグがONされていないと判定した場合(すなわち、生成中でない場合)は、ステップ7に進む。このタイミングテーブル生成中フラグは、後述するステップS7でONされ,ステップS84でOFFされる。
【0047】
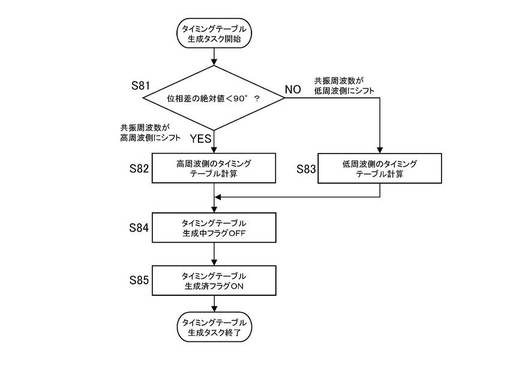
そして、タイミングテーブル生成部9は、ステップS7において、タイミングテーブル生成中フラグをONし、ステップS8において、図7に示すタイミングテーブルの生成タスクを開始すると共にステップS2に戻り、この生成タスクと並行してステップS2〜S6の判定処理を、タイミングテーブル生成済フラグがON(ステップS85)されるまで行う。
【0048】
ここで、タイミングテーブルの生成タスクのフローを図7に基づき詳述する。タイミングテーブル生成部9は、ステップS81において、各ブリッジ回路83,84から入力された各位相差の絶対値が、90°より小さいか否かを判定する。90°より小さい場合は、第2共振周波数が高周波側にシフトしているため、ステップS82に進み、周波数変更部4から入力されている現在の第2駆動周波数に第2閾値を加算することによってテーブル生成用第2周波数を定め、このテーブル生成用第2周波数と予め有する「第1共振周波数−第2共振周波数テーブル」に基づいてテーブル生成用第1周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて、新たなタイミングテーブルの計算を行う。一方、90°より大きい場合は、共振周波数が低周波側にシフトしているため、ステップS83に進み、現在の第2駆動周波数から第2閾値を減算することによってテーブル生成用第2周波数を定め、ステップS82と同様にして、テーブル生成用第1周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて新たなタイミングテーブルの計算を行う。そして、ステップS82又はステップS83において、新たなタイミングテーブルの計算が完了すると、光源制御部7が接続されていない方の記憶部6(第1領域61又は第2領域62)に生成したタイミングテーブルのデータを記憶させ、次のステップS84に進み、タイミングテーブル生成中フラグをOFFし、ステップS85に進み、タイミングテーブル生成済フラグをONする。これらステップS81〜S85により、タイミングテーブル生成タスクが終了する。
【0049】
次に、図6に戻って、ステップS5において、タイミングテーブル生成済フラグがONされていると判定された場合(すなわち、生成済である場合)は、ステップS9に進む。ステップS9において、リセット部11は、第2ずれ量が第1閾値以下であるか否かを判定する。第2ずれ量が第1閾値以下でない場合は、ステップS10に進む。一方、第2ずれ量が第1閾値以下である場合、新たなタイミングテーブルを記憶保持する必要がないと判定し、ステップS9’に進む。そして、ステップS9’において、新たなタイミングテーブルを消去(リセット)し、後述するステップS12に進む。
【0050】
ステップS10において、タイミングテーブル生成部9は、第2ずれ量が第2閾値よりも大きいか否かを、再度判定し、第2ずれ量が第2閾値より大きくなったと判定した場合、第2切替部10bに接続先を切替える指令をし、次のステップS11に進む。一方、ステップS10において、第2ずれ量が第2閾値より大きくなっていない場合は、ステップS9に戻り、ステップS10においてYESの判定がされるまで、タイミングテーブルの切替待ちとなる。
【0051】
ステップS11において、第2切替部10bは、タイミングテーブル生成部9からの指令に基づいて、光源制御部7の投光タイミング指令用のタイミングテーブルの読込先を切替え、光源制御部7は、新たなテーブルを読込んで光源部5に新たな投光タイミングを指令する。この第2切替部10bの切替動作の際、第1切替部10aは、タイミングテーブル生成部9の接続先を、第2切替部10bが接続した領域とは反対の領域に切替える。そして、これらの切替動作後、ステップS12に進む。
【0052】
ステップS12において、タイミングテーブル生成部9は、タイミングテーブル生成済フラグをOFFして、タイミングテーブルの一連の切替処理が完了する。そして、ステップS2に戻り、各ずれ量のモニタリング継続し、タイミングテーブルの切替処理を随時可能にする。
【0053】
なお、ステップS3において、第2ずれ量が第1閾値より大きいことを検出する前に、又は、新たなテーブルの生成が完了する前に、第2ずれ量が第2閾値より大きいこと検出した場合、ステップS4’に進み、例えば、ずれ量検出部8から光源部5へ停止指令を出力し、光源部5からのレーザ光の投光を停止させる。第1閾値は、第2閾値より小さく、かつ、第2閾値との差がテーブル生成に要する時間(数秒)に対応した十分な値になるように設定されている。このため、通常は、第2ずれ量が第1閾値より大きいことを検出する前に、又は、新たなテーブルの生成が完了する前に、第2ずれ量が第2閾値より大きいこと検出、すなわち、ステップS3でYESと判定することはないが、駆動開始時の装置の周辺温度が既に例えば装置の使用許容温度の範囲を超えている場合や、投光タイミングのデータ生成中に通常は生じ得ない瞬間的かつ過大な温度変化が、万が一生じてしまった場合等のことを想定して、システムを停止可能にしている。なお、かならずしも、ステップS3,S4を設けなくてもよい。
【0054】
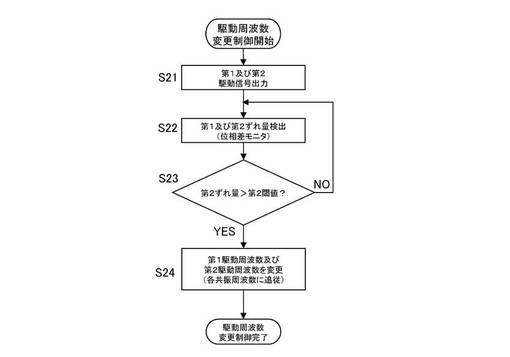
次に、図8に基づいて、各駆動周波数の変更処理について説明する。なお、ステップS20,S21はそれぞれ図7のステップS1,S2と同じ内容のため説明を簡略化する。
【0055】
まず、ステップS21において、駆動部3は、各駆動信号をそれぞれの駆動周波数で出力する。ステップS22において、ずれ量検出部8は各ずれ量を検出しその検出結果及び各位相差を周波数変更部4及びタイミングテーブル生成部9に出力する。
【0056】
そして、ステップS23において、周波数変更部4は、タイミングテーブル生成部9におけるステップS10と同様に、入力された第2ずれ量が第2閾値よりも大きいか否かを判定する。ここで、第2ずれ量が第2閾値より大きくなった場合は、ステップS24に進み、現在の第1駆動周波数に第1ずれ量を加算又は減算し、現在の第2駆動周波数に第2ずれ量を加算又は減算することにより、実際の各共振周波数を求め、各駆動周波数をこの求めた各共振周波数に合わせて変更するように各駆動回路31,32に指令する。これにより、駆動周波数の変更処理が完了する。一方、ステップS23において、第2ずれ量が第2閾値より大きくなっていない場合は、ステップS22に戻り、ステップS23においてYESの判定がされるまで各駆動周波数は変更されない。
【0057】
このように、本実施形態による光走査装置1によれば、大小2つの閾値(第1閾値、第2閾値)の差を新たなテーブル生成に要する時間に対応した十分な値(差)になるように適切に設定するだけで、ずれ量が第1閾値より大きくなったときに開始したテーブル生成を、ずれ量が第2閾値に達するまでに完了させることができる。したがって、投光タイミングのテーブル切替と各駆動周波数の変更を同時に行うことができるので、初期設定された投光タイミングでは意図する画素にレーザ光を照射できない状況においても、投光タイミングのテーブル生成待ちによる装置停止を抑制することができる。また、投光タイミングのテーブルを予め複数記憶させる必要がない。
【0058】
本実施形態において、第2駆動周波数のずれ量について、大小2つの閾値を予め定めた場合で説明したが、これに限らず、第1ずれ量について大小2つの閾値(第1閾値及び第2閾値)を予め適切に設定してもよい。この場合、タイミングテーブル生成部9は、第1ずれ量が第1閾値よりも大きい場合に、第1駆動周波数と第2閾値に基づきテーブル生成用第1周波数を定め、このテーブル生成用第1周波数と、「第1共振周波数−第2共振周波数テーブル」に基づいてテーブル生成用第2周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて、新たなテーブル生成を開始し、第1ずれ量が第1閾値よりも大きく設定された第2閾値よりも大きい場合に、タイミングテーブルの切替及び各駆動周波数の変更を行うように構成する。このように、第1閾値及び第2閾値は、第1駆動周波数及び第2駆動周波数のいずれか一方のずれ量について予め定められていればよい。
【0059】
また、本実施形態おいて、揺動角度信号は、ピエゾ抵抗素子で構成したブリッジ回路の出力電圧を用いた場合で説明したが、これに限るものではなく、ピエゾ抵抗素子で構成したブリッジ回路の出力電圧以外の信号を用いてもよい。例えば、特開2004−78130号公報や特開2004−242488号公報に記載されているように、第1駆動コイル25a及び第2駆動コイル25bに発生する逆起電力を検出し、これをx軸回り及びy軸回りの揺動角度信号とすることができる。但し、この場合においては、共振周波数と一致する周波数を有する駆動信号で光走査部3が駆動されると、駆動信号と揺動角度信号(逆起電力信号)との位相差は0°になる。
【0060】
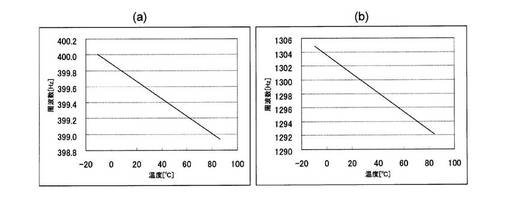
また、揺動角度信号を用いることなく、光走査部2又はその近傍の温度に基づいて第1ずれ量及び第2ずれ量を検出するようにしてもよい。図示省略するが、光走査部2又はその近傍の温度を検出する温度センサを設け、x軸回り及びy軸回りのそれぞれについて光走査部2又はその近傍の温度と共振周波数とが対応付けられた「温度−第1共振周波数テーブル(図9(a)参照)」及び「温度−第2共振周波数テーブル(図9(b)」参照を駆動部3に記憶させておく。このようにすれば、駆動部3は、温度センサの検出結果に基づいて温度−共振周波数テーブルを参照することにより、第1ずれ量と第2ずれ量をそれぞれ検出(算出)することができる。
【0061】
また、本実施形態において、駆動部3は各駆動周波数を対応する軸回りの共振周波数に合わせてそれぞれ設定し、ずれ量検出部8は各駆動周波数についてのずれ量をそれぞれ検出し、周波数変更部4は各駆動周波数を対応する軸回りの共振周波数にそれぞれ合わせて変更する構成で説明したが、これに限らず、駆動部3は第1駆動周波数及び第2駆動周波数のいずれか一方を対応する軸回りの共振周波数に合わせて設定し、ずれ量検出部8は第1駆動周波数及び第2駆動周波数のうち、共振周波数に合わせて設定された方についてのずれ量を検出し、周波数変更部4は第1駆動周波数及び第2駆動周波数をこれらの周波数比を維持しつつ変更する構成であってもよい。
【0062】
このように周波数比を維持しつつ変更する場合であって、第1駆動周波数を第1共振周波数と合わせて設定する場合は、第1ずれ量について第1閾値及び第2閾値を設定する。この場合、周波数変更部4は、第1駆動周波数については、第1駆動回路31が出力している第1駆動信号の第1駆動周波数に第1ずれ量を加算又は減算することにより、実際の第1共振周波数を演算し、第1駆動周波数をこの演算した第1共振周波数に合わせて変更し、第2駆動周波数については、第1駆動周波数との周波数比が変化しないように上記変更された第1駆動周波数に応じて変更するように構成する。また、タイミングテーブル生成部9は、テーブル生成用第1周波数については、現在の第1駆動周波数に第2閾値を加算又は減算することによって定め、テーブル生成用第2周波数については、テーブル生成用第1周波数との周波数比が変化しないようにテーブル生成用第1周波数に応じて定め、このテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始するように構成する。
【0063】
同様に、周波数比を維持しつつ変更する場合であって、第2駆動周波数を第2共振周波数と合わせて設定する場合は、第2ずれ量について第1閾値及び第2閾値を設定する。この場合、周波数変更部4は、第2駆動周波数については、第2駆動回路31が出力している第2駆動信号の第2駆動周波数に第2ずれ量を加算又は減算することにより、実際の第2共振周波数を演算し、第2駆動周波数をこの演算した第2共振周波数に合わせて変更し、第1駆動周波数については、第2駆動周波数との周波数比が変化しないように上記変更された第2駆動周波数に応じて変更するように構成する。また、タイミングテーブル生成部9は、テーブル生成用第2周波数については、現在の第2駆動周波数に第2閾値を加算又は減算することによって定め、テーブル生成用第1周波数については、テーブル生成用第2周波数との周波数比が変化しないようにテーブル生成用第2周波数に応じて定め、このテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始するように構成する。
【0064】
また、本実施形態において、二次元ガルバノミラー20の駆動周波数に対する位相差の特性は、位相差が−90°で駆動周波数が共振周波数と一致する点を対称点とした点対称な周波数特性を示す場合で説明したが、これに限らず、図10に示すように、共振周波数を中心として低周波数側と高周波数側とで非対称(非点対称)な周波数特性を示す場合であってもよい。この場合、図10に示すように、第1閾値を低周波側と高周波側それぞれに対して適宜設定し、また、第2閾値についても、低周波側と高周波側それぞれに対して適宜設定し、タイミングテーブル生成部9等において、低周波側か高周波側のいずれの閾値(第1閾値、第2閾値)を用いるかの判断は、例えば、ずれ量検出手段8が検出する位相差の値によって判断するように構成する。
【0065】
また、本実施形態では、光走査部2として電磁駆動式の二次元ガルバノミラーを用いているが、本発明はこれに限定されるものではなく、二つの一次元ガルバノミラーの回転軸が互いに直交するように配置する構成の光走査部2にも適用することが出来る。さらに、本実施形態では、光走査部2の駆動方式として電磁駆動式を用いているが、本発明はこれに限定されるものではなく、静電方式、圧電方式などの各種の駆動方式を光走査部2に適用することができる。
【0066】
さらに、本実施形態では、光走査装置1を光測距装置の光走査手段として用いた場合で説明したが、光走査装置1は、これに限らず、レーザ走査型のプロジェクタにおける光走査手段としても用いることができる。
【符号の説明】
【0067】
1・・・光走査装置
2・・・光走査部
3・・・駆動部
4・・・周波数変更部
5・・・光源部
6・・・記憶部
7・・・光源制御部
8・・・ずれ量検出部
9・・・タイミングテーブル生成部
10・・切替部
11・・リセット部
23a・外側可動部(可動部)
23b・内側可動部(可動部)
24・・光反射面
61・・第1領域(領域)
62・・第2領域(領域)
【技術分野】
【0001】
本発明は、レーザ光を対象領域内でリサージュ走査する光走査装置に関する。
【背景技術】
【0002】
従来から、レーザ光を対象領域内でリサージュ走査する光走査装置が知られている。この種の光走査装置としては、例えば、パルス状のレーザ光を予め設定された投光タイミングで投光する光源部と、二次元ガルバノミラーで構成される光走査部と、光走査部を駆動する駆動部とを備えて構成されたものがあり(例えば、特許文献1参照)、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する対象物までの距離を計測する光測距離装置や、レーザ走査型のプロジェクタ等の光走査手段として用いられている。
【0003】
この種の光走査装置において、駆動部は、例えば、二次元ガルバノミラーの各揺動方向の共振周波数と合わせて初期設定された駆動周波数で光走査部を駆動させている。ここで、例えば、光走査部の周辺温度が変化したり、光走査部自体の温度が変化したりすると共振周波数も変化する。この状態で、駆動周波数を変えずに光走査部を駆動させると、共振周波数とずれた状態で駆動させることになるため効率的でない。この共振周波数の温度変動対策として、この種の光走査装置においては、従来より、両方の揺動軸の駆動周波数をそれぞれの揺動軸の共振周波数に追従して変更して駆動制御したり、一方の揺動軸の駆動周波数については共振周波数に追従して変更し、他方の揺動軸の駆動周波数については一方の揺動軸の駆動周波数との比を維持しつつ変更したりして駆動制御を行っている。また、光源部から投光されるレーザ光の投光タイミングは、例えば、初期設定された駆動周波数に応じて定まるリサージュ走査軌跡に沿うレーザ光が、対象領域に予め定める各画素に照射可能に初期設定されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−175005号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の光走査装置において、初期設定された駆動周波数(初期値)と、温度に応じて変化する共振周波数に追従して変更された新たな駆動周波数との差が大きい場合や、初期設定された駆動周波数と、周波数比を維持しつつ変更された新たな駆動周波数との差が大きい場合、初期設定された投光タイミングでは意図する画素にレーザ光を照射することができなくなるおそれがあり、投光タイミングも変更せざるを得なくなる。この場合、例えば、共振周波数の変動し得る範囲を予め設定し、その変動範囲で予め定めた異なる複数の駆動周波数毎に投光タイミングのテーブルを予め記憶させておく構成としたり、温度に応じて変化する共振周波数に追従して新たな投光タイミングのテーブルを生成可能に構成したりすることが考えられる。
【0006】
しかしながら、予め複数の投光タイミングのテーブルを記憶させる構成の場合、投光タイミングのテーブルを記憶するメモリ容量が大きくなるためコストが上昇する。また、投光タイミングのテーブルを生成可能に構成する場合、投光タイミングのテーブル生成に要する演算は、駆動周波数の変更に要する演算と比較すると複雑であるため、投光タイミングのデータ生成時間は、駆動周波数の変更に要する演算時間と比較すると極めて長くなってしまう。その結果、駆動周波数は変更しているが、投光タイミングはその演算が完了していないため変更できていないという状態が発生するおそれがあるため、インターロックを作動させて装置を停止させなければならないという状態が発生するおそれがある。
【0007】
本発明は、このような課題に着目してなされたものであり、リサージュ走査による光走査装置において、投光タイミングのテーブルを予め複数用意させる必要がなく、かつ、投光タイミングのテーブル生成待ちによる装置の停止を抑制可能な光走査装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明による光走査装置は、光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、該可動部の揺動により前記光反射面に入射される光を対象領域内でリサージュ走査可能な光走査部と、前記可動部を前記第1軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び前記可動部を前記第2軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数の少なくとも一方を、対応する前記軸回りの共振周波数に合わせて設定し、前記第1駆動信号及び前記第2駆動信号を前記光走査部に出力して前記可動部を揺動させる駆動部と、前記光反射面に向かってパルス状のレーザ光を投光する光源部と、前記リサージュ走査されるレーザ光が前記対象領域に予め定める各画素に照射できるような前記レーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部と、前記2つの領域のいずれか一方に記憶されている前記テーブルを用いて前記投光タイミングを前記光源部に指令する光源制御部と、前記可動部が有する前記第1軸回りの第1共振周波数に対する前記第1駆動周波数のずれ量及び前記可動部が有する前記第2軸回りの第2共振周波数に対する前記第2駆動周波数のずれ量の少なくとも一方を検出するずれ量検出部と、前記ずれ量が予め定められた第1閾値よりも大きい場合に、新たな前記テーブルの生成用に前記第1駆動周波数及び前記第2駆動周波数について予めそれぞれ定める周波数に基づいて、前記新たなテーブルの生成を開始し、生成した前記新たなテーブルを前記記憶部の他方の前記領域に記憶させるタイミングテーブル生成部と、前記ずれ量が前記第1閾値より大きく予め定められた第2閾値よりも大きい場合に、前記光源制御部の投光タイミング指令用の前記テーブルの読込先を前記他方の領域に切替える切替部と、前記ずれ量が前記第2閾値よりも大きい場合に、前記第1駆動周波数及び前記第2駆動周波数の変更を行う周波数変更部と、を備えて構成する。
【発明の効果】
【0009】
本発明による光走査装置によれば、第1軸回りの第1共振周波数に対する第1駆動周波数のずれ量及び第2軸回りの第2共振周波数に対する第2駆動周波数のずれ量の少なくとも一方を検出し、ずれ量が予め定められた第1閾値よりも大きい場合に、新たなテーブルの生成用に各駆動周波数について予めそれぞれ定める周波数に基づいてテーブル生成を開始し、生成した新たなテーブルを記憶部の他方の領域に記憶させ、ずれ量が第1閾値より大きく予め定められた第2閾値よりも大きい場合に、光源制御部の投光タイミング指令用のテーブルの読込先を他方の領域に切替えると共に、各駆動周波数をそれぞれ変更する構成であるため、第1閾値と第2閾値の差を新たなテーブル生成に要する時間に対応した十分な値(差)になるように適切に設定するだけで、ずれ量が第1閾値より大きくなったときに開始したテーブル生成を、ずれ量が第2閾値に達するまでに完了させることができる。したがって、投光タイミングのテーブル切替と各駆動周波数の変更を同時に行うことができるので、初期設定された投光タイミングでは意図する画素にレーザ光を照射できない状況においても、投光タイミングのテーブル生成待ちによる装置停止を抑制することができる。また、投光タイミングのテーブルを予め複数記憶させる必要がない。
【図面の簡単な説明】
【0010】
【図1】本発明による光走査装置の一実施形態の概略構成を示す図であり、光測距装置に適用した場合のブロック図である。
【図2】上記実施形態の光走査部の一例である二次元ガルバノミラーの構成を示す図である。
【図3】上記光走査部の揺動角度を検出するためのピエゾ抵抗素子で構成されたブリッジ回路を示す図である。
【図4】二次元ガルバノミラーの一般的な周波数特性を示す図である。
【図5】上記実施形態のずれ量検出部による第1ずれ量及び第2ずれ量の検出原理を説明するための図である。
【図6】上記実施形態における投光タイミングのテーブルの切替処理を示すフロー図である。
【図7】上記実施形態における投光タイミングのテーブル生成タスクの処理内容を示すフロー図である。
【図8】上記実施形態における各駆動周波数の変更処理を示すフロー図である。
【図9】上記光走査部の温度−共振周波数テーブルの一例を示す図である。
【図10】二次元ガルバノミラーの別の周波数特性を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本発明による光走査装置の一実施形態の概略構成を示すブロック図である。
この光走査装置1は、パルス状のレーザ光を対象領域内でリサージュ走査するものである。以下の説明では、光走査装置1を、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する物体までの距離を計測する光測距装置の光走査手段として用いる場合で説明する。
【0012】
本実施形態による光走査装置1は、電磁駆動型の光走査部2と、光走査部2に駆動信号を入力し揺動駆動する駆動部3と、駆動信号の周波数を変更する周波数変更部4と、パルス状のレーザ光を投光する光源部5と、レーザ光の投光タイミングのテーブルを記憶する記憶部6と、レーザ光の投光タイミングを光源部5に指令する光源制御部7と、光走査部2の共振周波数に対する駆動信号の周波数のずれ量を検出するずれ量検出部8と、新たな投光タイミングのテーブルを生成するタイミングテーブル生成部9と、第1切替部10a及び第2切替部10bを有する切替部10と、リセット部11とを備える。
【0013】
前記光走査部2は、光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、可動部の揺動することによって、光反射面への入射光を対象領域内でリサージュ走査可能に構成されたものである。このような光走査部2としては、例えば、本出願人により提案された特許第2722314号公報に記載の二次元走査型の半導体ガルバノミラー(以下単に「二次元ガルバノミラー」という)を用いることができる。
【0014】
図2は、光走査部2の具体例としての二次元ガルバノミラー20の構成を示している。
この二次元ガルバノミラー20は、枠状の固定部21と、固定部21の内側に配置され一対の第1トーションバー22a,22aによって揺動可能に支持された外側可動部23aと、外側可動部23aの内側に配置され第1トーションバー22a,22aに軸方向が直交する一対の第2トーションバー22b,22bによって揺動可能に支持された内側可動部23bと、を備える。ここで、第1トーションバー22a,22aの中心軸をx軸(第1軸)とし、第2トーションバー22b,22bの中心軸をy軸(第2軸)とする。
【0015】
内側可動部23bの中央部には光反射面(ミラー)24が形成され、各可動部23a,23bの周縁部にはそれぞれ第1駆動コイル25a,第2駆動コイル25bが形成されている。第1駆動コイル25aの端部は、固定部21に形成された第1電極端子26a,26aに接続され、第2駆動コイル25bの端部は、固定部21に形成された第2電極端子26b,26bに接続されている。また、第1駆動コイル25aに磁界を作用させる一対の第1永久磁石27a,27a及び第2駆動コイル25bに磁界を作用させる一対の第2永久磁石27b,27bが固定部21を挟んでそれぞれ対向配置されている。
【0016】
二次元ガルバノミラー20は、各駆動コイル25a,25bに流れる電流(例えば、交流電流)と、第1永久磁石27a,27a及び第2永久磁石27b,27bによる磁界とによって各可動部23a,23bにローレンツ力が作用する。その結果、内側可動部23bが二次元方向に揺動し、光反射面24に入射されるレーザ光が対象領域内でリサージュ走査される。なお、以下の説明において、外側可動部23a及び内側可動部23bを含む可動部全体のx軸回りの共振周波数を「第1共振周波数」といい、内側可動部23bのy軸回りの共振周波数を「第2共振周波数」という。
【0017】
図1に戻って、前記駆動部3は、光走査部2を揺動駆動するものであり、例えば、第1駆動回路部31、第2駆動回路部32を備えて構成されている。本実施形態においては、駆動部3は、外側可動部23a及び内側可動部23bをx軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び内側可動部23bをy軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数を、対応する軸回りの共振周波数に合わせてそれぞれ設定し、第1駆動信号及び第2駆動信号を光走査部2に出力して外側可動部23a及び内側可動部23bを揺動させる構成である。
【0018】
前記第1駆動回路31は、第1駆動信号(例えば、交流電流)を第1共振周波数に合わせて設定された第1駆動周波数で、第1電極端子26a,26aを介して第1駆動コイル25aに供給する。同様に、前記第2駆動回路32は、第2駆動信号(例えば、交流電流)を第2共振周波数に合わせて設定された第2駆動周波数で、第2電極端子26b,26bを介して第2駆動コイル25bに供給する。第1駆動周波数及び第2駆動周波数は、例えば、初期状態における光走査部2の各共振周波数にそれぞれ合わせて初期設定されており、後述するように周波数変更部4からの指令によって変更可能に構成されている。
【0019】
なお、本実施形態において、二次元ガルバノミラー20の後述する図5に示す駆動周波数に対する位相差の特性は、位相差が−90°で駆動周波数が共振周波数(図5においては1300Hz)と一致する点を対称点とした点対称な特性を示すものとする。
【0020】
前記周波数変更部4は、ずれ量検出部8の検出結果に基づいて第1駆動周波数及び第2駆動周波数を変更するものであり、本実施形態においては、後述するようにずれ量検出手段8から、第1駆動周波数に対する第1共振周波数のずれ量である第1ずれ量のデータと、第2駆動周波数に対する第2共振周波数のずれ量である第2ずれ量のデータとが入力されるように構成されている。また、第1駆動周波数及び第2駆動周波数のいずれか一方のずれ量について、大小2つの閾値が予め定められている。本実施形態においては、第2ずれ量について大小2つの閾値が予め設定されており、以下の説明において、第2ずれ量についての小さい方の閾値を第1閾値、大きい方の閾値を第2閾値と言う。
【0021】
周波数変更部4は、ずれ量(すなわち、本実施形態においては第2ずれ量)が第2閾値よりも大きい場合に、第1駆動周波数及び第2駆動周波数を変更する。周波数変更部4は、具体的には、第1駆動周波数を実際の第1共振周波数に合わせ、第2駆動周波数を実際の第2共振周波数に合わせて、各駆動周波数の変更を行う。周波数変更部4は、例えば、各駆動回路31,32が出力している各駆動信号の駆動周波数に第1ずれ量及び第2ずれ量をそれぞれ加算又は減算することにより、実際の各共振周波数を演算し、各駆動周波数をこの演算した各共振周波数に合わせて変更するように各駆動回路31,32に指令する。なお、各ずれ量を加算するか減算するかの判断は、例えば、ずれ量検出手段8が検出する後述する位相差の値によって判断する。
【0022】
前記第2閾値は、各駆動周波数の変更を行うトリガーとして用いられると共に、後述するように投光タイミングの変更(切替)を行うトリガーとしても用いられる。ここで、各駆動周波数を実際の共振周波数に合わせて変更する場合、新たな各駆動周波数と初期設定等された変更前の各駆動周波数との差が大きいと、対象領域内でのレーザ光の走査軌跡が大きく変化するため、この状態で、投光タイミングを変更しないでレーザ光を照射すると、意図する画素内にレーザ光を照射することができなくなるおそれがある。そこで、第2閾値は、温度変動により各共振周波数が変動する状況下において、各駆動周波数と投光タイミングを変更しないでも、意図する画素内にレーザ光を照射可能な限界値(例えば、数Hz)に応じて適切に設定されている。また、上記第1閾値は、第2閾値より小さくなるように設定されており、後述するように第2閾値との差が、新たな投光タイミングのデータ生成に要する時間に応じた十分な値(差)になるように適切に設定されている。
【0023】
前記光源部5は、光走査部2の光反射面24に向かってパルス状のレーザ光を投光するものであり、例えば、光源51と投光光学系52とを含む。光源部5が投光するレーザ光の投光タイミングは光源制御部7によって指令される。光源51は、例えばレーザダイオードであり、光源制御部7からの指令によって発光してパルス状のレーザ光を出射する。投光光学系52は、例えばコリメータレンズを含み、光源51が発したレーザ光を平行光に変換する。そして、光源部5から投光されたレーザ光は、光走査部2の光反射面24で反射されて対象領域内をリサージュ走査される。光反射面24で反射走査されたレーザ光が対象領域内に存在する物体によって反射されたレーザ光(反射光)は、例えば、光測距装置の受光部12(例えば、フォトセンサ)で受光される。そして、この受光部12による反射光の受光タイミングと光源制御部7によるレーザ光の投光タイミングは光測距装置の測距部13に入力される。これにより、光測距装置の測距部13は、入力された投光タイミングと受光タイミングとの時間差に基づいて対象領域内に存在する物体までの距離を計測する。このようにして、本実施形態による光走査装置1は、光測距装置の光走査手段として用いられる。
【0024】
前記記憶部6は、リサージュ走査されるレーザ光が対象領域に予め定める各画素に照射できるようなレーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有するものであり、この2つの領域として第1領域61と第2領域62を備えて構成する。例えば、初期状態において、第1領域61は、後述するように初期設定された投光タイミングのテーブルを記憶し、第2切替部10bを介して光源制御部7と接続されており、第2領域62は、第1切替部10aを介してタイミングテーブル生成部9と接続されており、後述するようにタイミングテーブル生成部9において生成された新たな投光タイミングのテーブルを記憶可能に構成されている。
【0025】
前記光源制御部7は、第1領域61及び第2領域62のいずれか一方に記憶されているテーブルを用いて投光タイミングを光源部5に指令するものであり、第2切替部10bを介して第1領域61及び第2領域62のいずれか一方と接続されている。投光タイミングは、例えば、初期状態における光走査部2の各共振周波数にそれぞれ合わせて初期設定された各駆動周波数に応じて定まるリサージュ走査軌跡に沿って走査されるレーザ光が対象領域に予め定める各画素に照射可能に初期設定されている。光源制御部7は、初期状態において、例えば、第2切替部10bを介して第1領域61と接続されており、第1領域61に記憶されている投光タイミングのテーブル(初期データ)を読込んで光源部5に投光タイミングを指令するように構成されている。
【0026】
前記ずれ量検出部8は、第1共振周波数に対する第1駆動周波数のずれ量である第1ずれ量及び第2共振周波数に対する第2駆動周波数のずれ量である第2ずれ量の少なくとも一方を検出するものである。本実施形態において、ずれ量検出部8は、第1ずれ量及び第2ずれ量を検出し、例えば、第1ずれ量検出部81と、第2ずれ量検出部82と、図3に示す第1ブリッジ回路83及び第2ブリッジ回路84とを備えて構成される。
【0027】
前記第1ずれ量検出部81は、例えば、第1駆動回路31から出力された第1駆動信号と第1ブリッジ回路83の出力信号(x軸回りの揺動角度信号)との位相差に基づいて上記第1ずれ量を検出する。同様に、前記第2ずれ量検出部82は、例えば、第2駆動回路32から出力された第2駆動信号と上記第2ブリッジ回路84の出力信号(y軸回りの揺動角度信号)との位相差に基づいて第2ずれ量を検出する。
【0028】
前記第1ブリッジ回路83は、例えば、P型拡散抵抗によって、図2に示すように、第1トーションバー22a,22aの固定部21の根元近傍に形成された第1〜第4ピエゾ抵抗素子R1〜R4を備えて構成されており、x軸回りの揺動動作(捩れ)によって生じる引張歪み及び圧縮歪みを検出する。そして、第1〜第4ピエゾ抵抗素子R1〜R4は、図3に示すように、配線によって接続されてブリッジ回路(入力電圧Vi,出力電圧Vo)を構成する。同様に、前記第2ブリッジ回路84は、例えばP型拡散抵抗によって、第2トーションバー22b,22bの外側可動部23a側の根元近傍に形成された第5〜第8ピエゾ抵抗素子R5〜R8を備えて構成されており、y軸回りの揺動動作(捩れ)によって生じる引張歪み及び圧縮歪みを検出する。第5〜第8ピエゾ抵抗素子R5〜R8は、図3に示すようにブリッジ回路(入力電圧Vi,出力電圧Vo)を構成する。
【0029】
例えば、外側可動部23a及び内側可動部23bがx軸回りの一方に傾斜すると、第1,4ピエゾ抵抗素子R1,R4は引張応力を受けるとともに第2,3ピエゾ抵抗素子R2,R3は圧縮応力を受け、外側可動部23a及び内側可動部23bがx軸回りの他方に傾斜すると、各ピエゾ抵抗素子R1〜R4はそれぞれ上記と逆の応力を受ける。P型拡散抵抗によって形成された第1〜第4ピエゾ抵抗素子R1〜R4は、引張応力を受けると抵抗値が増加し、圧縮応力を受けると抵抗値が減少する。このため、第1ブリッジ回路83からはx軸回りの揺動角度(振れ角)に応じた電圧が正弦波として出力される。この出力電圧Voを第1ずれ量検出部81でモニタすることでx軸回りの揺動角度を連続的に検出することができる。同様に、第2ブリッジ回路84からの出力電圧Voを第2ずれ量検出部82でモニタすることでy軸回りの揺動角度を連続的に検出することができる。
【0030】
ここで、ずれ量検出部8によるずれ量の検出原理について図4及び図5を用いて簡単に説明する。図4及び図5は、共にガルバノミラーの周波数特性を示す図であり、図4は、駆動周波数に対するミラーの揺動角度(ゲイン)を示し、図5は、駆動周波数に対する駆動信号とミラーの揺動角度(信号)との位相差を示している。
【0031】
図5に示すように、ガルバノミラーがその共振周波数(ここでは1300Hz)と同一の周波数を有する駆動信号で駆動されると、駆動信号の位相に対してミラーの揺動角度(信号)の位相は90°遅れ、駆動信号と揺動角度信号との間には90°の位相差が発生する。すなわち、駆動信号とミラーの揺動角度信号との位相差が90°でない場合には、駆動周波数とガルバノミラーの共振周波数とが一致していない、換言すれば、温度変化によって図4及び図5に示すガルバノミラーの周波数特性(共振周波数)がシフトしていると考えることができる。ガルバノミラーの周波数特性は予め取得しておくことが可能であるから、駆動信号と揺動角度信号との位相差を検出することで、駆動周波数と実際のガルバノミラーの共振周波数とのずれ量(共振周波数のシフト量)を把握することができる。
【0032】
上記の検出原理を利用することで、第1ずれ量検出部81は、光走査部2のx軸回りの周波数特性に基づいて第1ずれ量を検出することができ、第2ずれ量検出部82は、光走査部2のy軸回りの周波数特性に基づいて第2ずれ量を検出することができる。具体的には、第1ずれ量検出部81は、光走査部2のx軸回りについて図5に対応する駆動周波数−位相差特性の情報(テーブル等)を有しており、第1駆動信号と第1ブリッジ回路83の出力信号(揺動角度信号)との位相差から第1ずれ量(第1共振周波数のシフト量)を検出する。同様に、第2ずれ量検出部82は、y軸回りについて駆動周波数−位相差特性の情報を有し、第2駆動信号と第2ブリッジ回路84の出力信号との位相差から第2ずれ量(第2共振周波数のシフト量)を検出する。
【0033】
前記タイミングテーブル生成部9は、例えば、ずれ量検出部8からずれ量の検出結果のデータが入力されるように構成されており、本実施形態においては第2ずれ量が予め定められた第1閾値よりも大きい場合に、すなわち、図5に示す通常使用領域を超えたときに、新たなテーブルの生成を開始し、生成した新たなテーブルを記憶部6の他方の領域(例えば、第2領域62)に記憶させる。新たなテーブルの生成は、新たなテーブル生成用に第1駆動周波数について予め定める周波数(以下において、「テーブル生成用第1周波数」と言う)と、新たなテーブル生成用に第2駆動周波数について予め定める周波数(以下において、「テーブル生成用第2周波数」と言う)とに基づいて行うように構成されている。
【0034】
タイミングテーブル生成部9は、具体的には、例えば、周波数変更部4等から現在の第2駆動周波数の情報を読込み、その第2駆動周波数に第2閾値を加算又は減算することによって、テーブル生成用第2周波数を、例えば、投光タイミングのテーブルの計算開始前に予め定めることができる。このテーブル生成用第2周波数は、第2ずれ量が第2閾値と一致したときの実際の第2共振周波数と一致する。タイミングテーブル生成部9は、例えば、温度に応じてそれぞれ変化する第2共振周波数と第1共振周波数を対応付けた「第1共振周波数−第2共振周波数テーブル」を予め有しており、第2駆動周波数と第2閾値から求めた第2共振周波数(すなわち、テーブル生成用第2周波数)と対応する第1共振周波数を、この「第1共振周波数−第2共振周波数テーブル」に基づいて求め、この第1共振周波数をテーブル生成用第1周波数として予め定める。このようにして、タイミングテーブル生成部9は、第2ずれ量が第1閾値よりも大きくなったときに、第2ずれ量が第2閾値と一致するときの各共振周波数にそれぞれ一致するテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始する。なお、テーブル生成用第2周波数を予め定める際に、第2閾値を加算するか減算するかの判断は、例えば、ずれ量検出手段8が検出する位相差の値によって判断する。また、タイミングテーブル生成部9は、例えば、初期状態においては、第2領域62に接続されており、新たな投光タイミングのテーブル生成が完了するとそのデータを第2領域62に出力して記憶させる。
【0035】
ここで、上記第1閾値は、第2閾値より小さく、かつ、第2閾値との差が新たな投光タイミングのテーブル生成に要する時間(数秒)に対応した十分な値(差)、例えば、2Hz程度になるように、適切に設定されている。これにより、第2ずれ量が第1閾値より大きくなったときに開始した新たなテーブル生成を、第2ずれ量が第2閾値に達するまでに(すなわち、図5に示すテーブル生成領域内で)完了させることができる。なお、第1閾値と第2閾値との差は、一例として2Hzとしたが、これに限らず、温度変動による各共振周波数の変動特性や走査部2の周辺の温度の変動状況等に基づいて適宜設定される。
【0036】
前記切替部10は、ずれ量(すなわち、本実施形態においては第2ずれ量)が第2閾値よりも大きい場合に、光源制御部7の投光タイミング指令用のテーブルの読込先を他方の領域に(例えば、第2領域62)に切替えるものであり、例えば、第1切替部10aと第2切替部10bとを備えて構成する。
【0037】
前記第1切替部10aは、タイミングテーブル生成部9を記憶部6の第1領域61及び第2領域62のいずれか一方と切替可能に接続するものであり、例えば、初期状態においては、タイミングテーブル生成部9を第2領域62に接続させており、タイミングテーブル生成部9が新たなテーブル生成を完了させるとそのデータを第2領域62に出力可能にしている。第1切替部10aは、例えば、第2切替部10bの切替動作と同期してタイミングテーブル生成部9の接続先を切替えるように構成されている。第1切替部10aは、例えば、後述するように第2切替部10bが光源制御部7の接続先を第1領域61から第2領域62に切替えるとき、タイミングテーブル生成部9の接続先を第2領域62から第1領域61に切替える。これにより、光源制御部7が光源部4への投光タイミング指令用にアクセスしている領域に、次に生成される別の投光タイミングのテーブルを上書きしないようにする。
【0038】
前記第2切替部10bは、光源制御部7を記憶部6の第1領域61及び第2領域62のいずれか一方と切替可能に接続するものであり、例えば、初期状態においては、光源制御部7を第1領域61に接続させている。第2切替部10bは、第2ずれ量が第2閾値よりも大きくなった場合、例えば、接続先を切替える指令をタイミングテーブル生成部9等から受けることで、光源制御部7の接続先を第1領域61から第2領域62に切替える。これにより、光源制御部7は新たなテーブルを読込んで光源部5に新たな投光タイミングを指令する。このようにして、投光タイミングを瞬間的に切替えることができる。
【0039】
前記リセット部11は、記憶部6が新たな投光タイミングのテーブルを他方の領域(すなわち、本実施形態において、新たなテーブルが始めて生成された場合であれば、第2領域62)に記憶している場合に、ずれ量検出手段8の検出結果に基づいて新たなテーブルを消去するように構成されている。リセット部11は、具体的には、新たなテーブル生成が完了し、そのテーブルが記憶されているにも関わらず、第2ずれ量が第1閾値以下になった場合(後述する図6に示すステップS9:YES)に、新たなテーブルを記憶保持する必要がないと判定しそのテーブルのデータを消去(リセット)する。これにより、無駄なデータの記憶保持をさせないようにすることができる。
【0040】
次に、以上のような構成を有する光走査装置1の投光タイミングの切替動作及び各駆動周波数の変更動作について、図1,図6〜図8に基づいてそれぞれ説明する。
【0041】
まず、図6及び図7に基づいて、投光タイミングの切替動作について説明する。
図6に示すように、ステップS1において、駆動部3は、各駆動信号をそれぞれの駆動周波数で出力する。この際、周波数変更部4は、現在の駆動周波数の情報をタイミングテーブル生成部9に出力する。
【0042】
ステップS2において、第1ずれ量検出部81は、第1駆動信号と第1ブリッジ回路83の出力信号との位相差に基づいて第1ずれ量を検出し、第2ずれ量検出部82は、第2駆動信号と第2ブリッジ回路84の出力信号との位相差に基づいて第2ずれ量を検出する。そして、各ずれ量の検出結果及び各位相差は、タイミングテーブル生成部9及び周波数変更部4に出力される。この各位相差は、後述するステップS81,S23において、各共振周波数のシフト方向の判定に利用される。
【0043】
ステップS3において、タイミングテーブル生成部9は、入力された第2ずれ量が第2閾値よりも大きいか否かを判定する。第2ずれ量が第2閾値より大きくない場合は、ステップS4に進む。
【0044】
ステップS4において、タイミングテーブル生成部9は、入力された第2ずれ量が第1閾値よりも大きいか否かを判定する。第2ずれ量が第1閾値より大きくなった場合は、ステップS5に進む。第2ずれ量が第1閾値より大きくない場合は、ステップS2に戻る。
【0045】
ステップS5において、タイミングテーブル生成部9は、新たな投光タイミングのデータ(以下において、「タイミングテーブル」と言う)を生成済であるか否かを判定する。この判定は、タイミングテーブル生成済フラグがONされているか否かで判定する。タイミングテーブル生成済フラグがONされていないと判定した場合(すなわち、生成済でない場合)は、ステップS6に進む。このタイミングテーブル生成済フラグは、後述するステップS85でONされ,ステップS12でOFFされる。
【0046】
ステップS6において、タイミングテーブル生成部9は、新たなタイミングテーブルを生成中であるか否かを判定する。この判定は、タイミングテーブル生成中フラグがONされているか否かで判定する。タイミングテーブル生成中フラグがONされていると判定した場合(すなわち、生成中の場合)は、ステップS2に戻り、タイミングテーブル生成中フラグがONされていないと判定した場合(すなわち、生成中でない場合)は、ステップ7に進む。このタイミングテーブル生成中フラグは、後述するステップS7でONされ,ステップS84でOFFされる。
【0047】
そして、タイミングテーブル生成部9は、ステップS7において、タイミングテーブル生成中フラグをONし、ステップS8において、図7に示すタイミングテーブルの生成タスクを開始すると共にステップS2に戻り、この生成タスクと並行してステップS2〜S6の判定処理を、タイミングテーブル生成済フラグがON(ステップS85)されるまで行う。
【0048】
ここで、タイミングテーブルの生成タスクのフローを図7に基づき詳述する。タイミングテーブル生成部9は、ステップS81において、各ブリッジ回路83,84から入力された各位相差の絶対値が、90°より小さいか否かを判定する。90°より小さい場合は、第2共振周波数が高周波側にシフトしているため、ステップS82に進み、周波数変更部4から入力されている現在の第2駆動周波数に第2閾値を加算することによってテーブル生成用第2周波数を定め、このテーブル生成用第2周波数と予め有する「第1共振周波数−第2共振周波数テーブル」に基づいてテーブル生成用第1周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて、新たなタイミングテーブルの計算を行う。一方、90°より大きい場合は、共振周波数が低周波側にシフトしているため、ステップS83に進み、現在の第2駆動周波数から第2閾値を減算することによってテーブル生成用第2周波数を定め、ステップS82と同様にして、テーブル生成用第1周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて新たなタイミングテーブルの計算を行う。そして、ステップS82又はステップS83において、新たなタイミングテーブルの計算が完了すると、光源制御部7が接続されていない方の記憶部6(第1領域61又は第2領域62)に生成したタイミングテーブルのデータを記憶させ、次のステップS84に進み、タイミングテーブル生成中フラグをOFFし、ステップS85に進み、タイミングテーブル生成済フラグをONする。これらステップS81〜S85により、タイミングテーブル生成タスクが終了する。
【0049】
次に、図6に戻って、ステップS5において、タイミングテーブル生成済フラグがONされていると判定された場合(すなわち、生成済である場合)は、ステップS9に進む。ステップS9において、リセット部11は、第2ずれ量が第1閾値以下であるか否かを判定する。第2ずれ量が第1閾値以下でない場合は、ステップS10に進む。一方、第2ずれ量が第1閾値以下である場合、新たなタイミングテーブルを記憶保持する必要がないと判定し、ステップS9’に進む。そして、ステップS9’において、新たなタイミングテーブルを消去(リセット)し、後述するステップS12に進む。
【0050】
ステップS10において、タイミングテーブル生成部9は、第2ずれ量が第2閾値よりも大きいか否かを、再度判定し、第2ずれ量が第2閾値より大きくなったと判定した場合、第2切替部10bに接続先を切替える指令をし、次のステップS11に進む。一方、ステップS10において、第2ずれ量が第2閾値より大きくなっていない場合は、ステップS9に戻り、ステップS10においてYESの判定がされるまで、タイミングテーブルの切替待ちとなる。
【0051】
ステップS11において、第2切替部10bは、タイミングテーブル生成部9からの指令に基づいて、光源制御部7の投光タイミング指令用のタイミングテーブルの読込先を切替え、光源制御部7は、新たなテーブルを読込んで光源部5に新たな投光タイミングを指令する。この第2切替部10bの切替動作の際、第1切替部10aは、タイミングテーブル生成部9の接続先を、第2切替部10bが接続した領域とは反対の領域に切替える。そして、これらの切替動作後、ステップS12に進む。
【0052】
ステップS12において、タイミングテーブル生成部9は、タイミングテーブル生成済フラグをOFFして、タイミングテーブルの一連の切替処理が完了する。そして、ステップS2に戻り、各ずれ量のモニタリング継続し、タイミングテーブルの切替処理を随時可能にする。
【0053】
なお、ステップS3において、第2ずれ量が第1閾値より大きいことを検出する前に、又は、新たなテーブルの生成が完了する前に、第2ずれ量が第2閾値より大きいこと検出した場合、ステップS4’に進み、例えば、ずれ量検出部8から光源部5へ停止指令を出力し、光源部5からのレーザ光の投光を停止させる。第1閾値は、第2閾値より小さく、かつ、第2閾値との差がテーブル生成に要する時間(数秒)に対応した十分な値になるように設定されている。このため、通常は、第2ずれ量が第1閾値より大きいことを検出する前に、又は、新たなテーブルの生成が完了する前に、第2ずれ量が第2閾値より大きいこと検出、すなわち、ステップS3でYESと判定することはないが、駆動開始時の装置の周辺温度が既に例えば装置の使用許容温度の範囲を超えている場合や、投光タイミングのデータ生成中に通常は生じ得ない瞬間的かつ過大な温度変化が、万が一生じてしまった場合等のことを想定して、システムを停止可能にしている。なお、かならずしも、ステップS3,S4を設けなくてもよい。
【0054】
次に、図8に基づいて、各駆動周波数の変更処理について説明する。なお、ステップS20,S21はそれぞれ図7のステップS1,S2と同じ内容のため説明を簡略化する。
【0055】
まず、ステップS21において、駆動部3は、各駆動信号をそれぞれの駆動周波数で出力する。ステップS22において、ずれ量検出部8は各ずれ量を検出しその検出結果及び各位相差を周波数変更部4及びタイミングテーブル生成部9に出力する。
【0056】
そして、ステップS23において、周波数変更部4は、タイミングテーブル生成部9におけるステップS10と同様に、入力された第2ずれ量が第2閾値よりも大きいか否かを判定する。ここで、第2ずれ量が第2閾値より大きくなった場合は、ステップS24に進み、現在の第1駆動周波数に第1ずれ量を加算又は減算し、現在の第2駆動周波数に第2ずれ量を加算又は減算することにより、実際の各共振周波数を求め、各駆動周波数をこの求めた各共振周波数に合わせて変更するように各駆動回路31,32に指令する。これにより、駆動周波数の変更処理が完了する。一方、ステップS23において、第2ずれ量が第2閾値より大きくなっていない場合は、ステップS22に戻り、ステップS23においてYESの判定がされるまで各駆動周波数は変更されない。
【0057】
このように、本実施形態による光走査装置1によれば、大小2つの閾値(第1閾値、第2閾値)の差を新たなテーブル生成に要する時間に対応した十分な値(差)になるように適切に設定するだけで、ずれ量が第1閾値より大きくなったときに開始したテーブル生成を、ずれ量が第2閾値に達するまでに完了させることができる。したがって、投光タイミングのテーブル切替と各駆動周波数の変更を同時に行うことができるので、初期設定された投光タイミングでは意図する画素にレーザ光を照射できない状況においても、投光タイミングのテーブル生成待ちによる装置停止を抑制することができる。また、投光タイミングのテーブルを予め複数記憶させる必要がない。
【0058】
本実施形態において、第2駆動周波数のずれ量について、大小2つの閾値を予め定めた場合で説明したが、これに限らず、第1ずれ量について大小2つの閾値(第1閾値及び第2閾値)を予め適切に設定してもよい。この場合、タイミングテーブル生成部9は、第1ずれ量が第1閾値よりも大きい場合に、第1駆動周波数と第2閾値に基づきテーブル生成用第1周波数を定め、このテーブル生成用第1周波数と、「第1共振周波数−第2共振周波数テーブル」に基づいてテーブル生成用第2周波数を定め、このテーブル生成用第1周波数とテーブル生成用第2周波数とに基づいて、新たなテーブル生成を開始し、第1ずれ量が第1閾値よりも大きく設定された第2閾値よりも大きい場合に、タイミングテーブルの切替及び各駆動周波数の変更を行うように構成する。このように、第1閾値及び第2閾値は、第1駆動周波数及び第2駆動周波数のいずれか一方のずれ量について予め定められていればよい。
【0059】
また、本実施形態おいて、揺動角度信号は、ピエゾ抵抗素子で構成したブリッジ回路の出力電圧を用いた場合で説明したが、これに限るものではなく、ピエゾ抵抗素子で構成したブリッジ回路の出力電圧以外の信号を用いてもよい。例えば、特開2004−78130号公報や特開2004−242488号公報に記載されているように、第1駆動コイル25a及び第2駆動コイル25bに発生する逆起電力を検出し、これをx軸回り及びy軸回りの揺動角度信号とすることができる。但し、この場合においては、共振周波数と一致する周波数を有する駆動信号で光走査部3が駆動されると、駆動信号と揺動角度信号(逆起電力信号)との位相差は0°になる。
【0060】
また、揺動角度信号を用いることなく、光走査部2又はその近傍の温度に基づいて第1ずれ量及び第2ずれ量を検出するようにしてもよい。図示省略するが、光走査部2又はその近傍の温度を検出する温度センサを設け、x軸回り及びy軸回りのそれぞれについて光走査部2又はその近傍の温度と共振周波数とが対応付けられた「温度−第1共振周波数テーブル(図9(a)参照)」及び「温度−第2共振周波数テーブル(図9(b)」参照を駆動部3に記憶させておく。このようにすれば、駆動部3は、温度センサの検出結果に基づいて温度−共振周波数テーブルを参照することにより、第1ずれ量と第2ずれ量をそれぞれ検出(算出)することができる。
【0061】
また、本実施形態において、駆動部3は各駆動周波数を対応する軸回りの共振周波数に合わせてそれぞれ設定し、ずれ量検出部8は各駆動周波数についてのずれ量をそれぞれ検出し、周波数変更部4は各駆動周波数を対応する軸回りの共振周波数にそれぞれ合わせて変更する構成で説明したが、これに限らず、駆動部3は第1駆動周波数及び第2駆動周波数のいずれか一方を対応する軸回りの共振周波数に合わせて設定し、ずれ量検出部8は第1駆動周波数及び第2駆動周波数のうち、共振周波数に合わせて設定された方についてのずれ量を検出し、周波数変更部4は第1駆動周波数及び第2駆動周波数をこれらの周波数比を維持しつつ変更する構成であってもよい。
【0062】
このように周波数比を維持しつつ変更する場合であって、第1駆動周波数を第1共振周波数と合わせて設定する場合は、第1ずれ量について第1閾値及び第2閾値を設定する。この場合、周波数変更部4は、第1駆動周波数については、第1駆動回路31が出力している第1駆動信号の第1駆動周波数に第1ずれ量を加算又は減算することにより、実際の第1共振周波数を演算し、第1駆動周波数をこの演算した第1共振周波数に合わせて変更し、第2駆動周波数については、第1駆動周波数との周波数比が変化しないように上記変更された第1駆動周波数に応じて変更するように構成する。また、タイミングテーブル生成部9は、テーブル生成用第1周波数については、現在の第1駆動周波数に第2閾値を加算又は減算することによって定め、テーブル生成用第2周波数については、テーブル生成用第1周波数との周波数比が変化しないようにテーブル生成用第1周波数に応じて定め、このテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始するように構成する。
【0063】
同様に、周波数比を維持しつつ変更する場合であって、第2駆動周波数を第2共振周波数と合わせて設定する場合は、第2ずれ量について第1閾値及び第2閾値を設定する。この場合、周波数変更部4は、第2駆動周波数については、第2駆動回路31が出力している第2駆動信号の第2駆動周波数に第2ずれ量を加算又は減算することにより、実際の第2共振周波数を演算し、第2駆動周波数をこの演算した第2共振周波数に合わせて変更し、第1駆動周波数については、第2駆動周波数との周波数比が変化しないように上記変更された第2駆動周波数に応じて変更するように構成する。また、タイミングテーブル生成部9は、テーブル生成用第2周波数については、現在の第2駆動周波数に第2閾値を加算又は減算することによって定め、テーブル生成用第1周波数については、テーブル生成用第2周波数との周波数比が変化しないようにテーブル生成用第2周波数に応じて定め、このテーブル生成用第1周波数及びテーブル生成用第2周波数に基づいて、新たな投光タイミングのテーブルの生成を開始するように構成する。
【0064】
また、本実施形態において、二次元ガルバノミラー20の駆動周波数に対する位相差の特性は、位相差が−90°で駆動周波数が共振周波数と一致する点を対称点とした点対称な周波数特性を示す場合で説明したが、これに限らず、図10に示すように、共振周波数を中心として低周波数側と高周波数側とで非対称(非点対称)な周波数特性を示す場合であってもよい。この場合、図10に示すように、第1閾値を低周波側と高周波側それぞれに対して適宜設定し、また、第2閾値についても、低周波側と高周波側それぞれに対して適宜設定し、タイミングテーブル生成部9等において、低周波側か高周波側のいずれの閾値(第1閾値、第2閾値)を用いるかの判断は、例えば、ずれ量検出手段8が検出する位相差の値によって判断するように構成する。
【0065】
また、本実施形態では、光走査部2として電磁駆動式の二次元ガルバノミラーを用いているが、本発明はこれに限定されるものではなく、二つの一次元ガルバノミラーの回転軸が互いに直交するように配置する構成の光走査部2にも適用することが出来る。さらに、本実施形態では、光走査部2の駆動方式として電磁駆動式を用いているが、本発明はこれに限定されるものではなく、静電方式、圧電方式などの各種の駆動方式を光走査部2に適用することができる。
【0066】
さらに、本実施形態では、光走査装置1を光測距装置の光走査手段として用いた場合で説明したが、光走査装置1は、これに限らず、レーザ走査型のプロジェクタにおける光走査手段としても用いることができる。
【符号の説明】
【0067】
1・・・光走査装置
2・・・光走査部
3・・・駆動部
4・・・周波数変更部
5・・・光源部
6・・・記憶部
7・・・光源制御部
8・・・ずれ量検出部
9・・・タイミングテーブル生成部
10・・切替部
11・・リセット部
23a・外側可動部(可動部)
23b・内側可動部(可動部)
24・・光反射面
61・・第1領域(領域)
62・・第2領域(領域)
【特許請求の範囲】
【請求項1】
光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、該可動部の揺動により前記光反射面に入射される光を対象領域内でリサージュ走査可能な光走査部と、
前記可動部を前記第1軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び前記可動部を前記第2軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数の少なくとも一方を、対応する前記軸回りの共振周波数に合わせて設定し、前記第1駆動信号及び前記第2駆動信号を前記光走査部に出力して前記可動部を揺動させる駆動部と、
前記光反射面に向かってパルス状のレーザ光を投光する光源部と、
前記リサージュ走査されるレーザ光が前記対象領域に予め定める各画素に照射できるような前記レーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部と、
前記2つの領域のいずれか一方に記憶されている前記テーブルを用いて前記投光タイミングを前記光源部に指令する光源制御部と、
前記可動部が有する前記第1軸回りの第1共振周波数に対する前記第1駆動周波数のずれ量及び前記可動部が有する前記第2軸回りの第2共振周波数に対する前記第2駆動周波数のずれ量の少なくとも一方を検出するずれ量検出部と、
前記ずれ量が予め定められた第1閾値よりも大きい場合に、新たな前記テーブルの生成用に前記第1駆動周波数及び前記第2駆動周波数について予めそれぞれ定める周波数に基づいて、前記新たなテーブルの生成を開始し、生成した前記新たなテーブルを前記記憶部の他方の前記領域に記憶させるタイミングテーブル生成部と、
前記ずれ量が前記第1閾値より大きく予め定められた第2閾値よりも大きい場合に、前記光源制御部の投光タイミング指令用の前記テーブルの読込先を前記他方の領域に切替える切替部と、
前記ずれ量が前記第2閾値よりも大きい場合に、前記第1駆動周波数及び前記第2駆動周波数の変更を行う周波数変更部と、
を備えたことを特徴とする光走査装置。
【請求項2】
前記駆動部は、前記第1駆動周波数及び前記第2駆動周波数を、前記対応する前記軸回りの共振周波数に合わせてそれぞれ設定し、
前記ずれ量検出部は、前記第1共振周波数に対する前記第1駆動周波数のずれ量及び前記第2共振周波数に対する前記第2駆動周波数のずれ量を検出し、
前記第1閾値及び前記第2閾値は、前記第1駆動周波数及び前記第2駆動周波数のいずれか一方の前記ずれ量について予め定められ、
前記周波数変更部は、前記第1駆動周波数を前記第1共振周波数に合わせ、前記第2駆動周波数を前記第2共振周波数に合わせて前記変更を行うことを特徴とする請求項1に記載の光走査装置。
【請求項3】
前記駆動部は、前記第1駆動周波数及び前記第2駆動周波数のいずれか一方を、前記対応する前記軸回りの共振周波数に合わせて設定し、
前記ずれ量検出部は、前記第1駆動周波数及び前記第2駆動周波数のうち、前記共振周波数に合わせて設定された方についての前記ずれ量を検出し、
前記周波数変更部は、前記第1駆動周波数及び前記第2駆動周波数をこれらの周波数比を維持しつつ前記変更を行うことを特徴とする請求項1に記載の光走査装置。
【請求項4】
前記記憶部が前記他方の領域に前記新たなテーブルを記憶している場合に、前記ずれ量検出部の検出結果に基づいて、前記新たなテーブルを消去するリセット部を備えたことを特徴とする請求項1〜3のいずれか1つに記載の光走査装置。
【請求項5】
前記ずれ量検出部において、前記ずれ量が前記第1閾値より大きいことを検出する前に、又は、前記新たなテーブルの生成が完了する前に、前記ずれ量が前記第2閾値より大きいこと検出する場合、前記光源部からのレーザ光の投光を停止させることを特徴とする請求項1〜4のいずれか1つに記載の光走査装置。
【請求項1】
光反射面を有する可動部が互いに直交する第1軸及び第2軸の各軸回りに揺動可能に形成され、該可動部の揺動により前記光反射面に入射される光を対象領域内でリサージュ走査可能な光走査部と、
前記可動部を前記第1軸回りに揺動させる第1駆動信号の周波数である第1駆動周波数及び前記可動部を前記第2軸回りに揺動させる第2駆動信号の周波数である第2駆動周波数の少なくとも一方を、対応する前記軸回りの共振周波数に合わせて設定し、前記第1駆動信号及び前記第2駆動信号を前記光走査部に出力して前記可動部を揺動させる駆動部と、
前記光反射面に向かってパルス状のレーザ光を投光する光源部と、
前記リサージュ走査されるレーザ光が前記対象領域に予め定める各画素に照射できるような前記レーザ光の投光タイミングのテーブルを記憶可能な領域を2つ有する記憶部と、
前記2つの領域のいずれか一方に記憶されている前記テーブルを用いて前記投光タイミングを前記光源部に指令する光源制御部と、
前記可動部が有する前記第1軸回りの第1共振周波数に対する前記第1駆動周波数のずれ量及び前記可動部が有する前記第2軸回りの第2共振周波数に対する前記第2駆動周波数のずれ量の少なくとも一方を検出するずれ量検出部と、
前記ずれ量が予め定められた第1閾値よりも大きい場合に、新たな前記テーブルの生成用に前記第1駆動周波数及び前記第2駆動周波数について予めそれぞれ定める周波数に基づいて、前記新たなテーブルの生成を開始し、生成した前記新たなテーブルを前記記憶部の他方の前記領域に記憶させるタイミングテーブル生成部と、
前記ずれ量が前記第1閾値より大きく予め定められた第2閾値よりも大きい場合に、前記光源制御部の投光タイミング指令用の前記テーブルの読込先を前記他方の領域に切替える切替部と、
前記ずれ量が前記第2閾値よりも大きい場合に、前記第1駆動周波数及び前記第2駆動周波数の変更を行う周波数変更部と、
を備えたことを特徴とする光走査装置。
【請求項2】
前記駆動部は、前記第1駆動周波数及び前記第2駆動周波数を、前記対応する前記軸回りの共振周波数に合わせてそれぞれ設定し、
前記ずれ量検出部は、前記第1共振周波数に対する前記第1駆動周波数のずれ量及び前記第2共振周波数に対する前記第2駆動周波数のずれ量を検出し、
前記第1閾値及び前記第2閾値は、前記第1駆動周波数及び前記第2駆動周波数のいずれか一方の前記ずれ量について予め定められ、
前記周波数変更部は、前記第1駆動周波数を前記第1共振周波数に合わせ、前記第2駆動周波数を前記第2共振周波数に合わせて前記変更を行うことを特徴とする請求項1に記載の光走査装置。
【請求項3】
前記駆動部は、前記第1駆動周波数及び前記第2駆動周波数のいずれか一方を、前記対応する前記軸回りの共振周波数に合わせて設定し、
前記ずれ量検出部は、前記第1駆動周波数及び前記第2駆動周波数のうち、前記共振周波数に合わせて設定された方についての前記ずれ量を検出し、
前記周波数変更部は、前記第1駆動周波数及び前記第2駆動周波数をこれらの周波数比を維持しつつ前記変更を行うことを特徴とする請求項1に記載の光走査装置。
【請求項4】
前記記憶部が前記他方の領域に前記新たなテーブルを記憶している場合に、前記ずれ量検出部の検出結果に基づいて、前記新たなテーブルを消去するリセット部を備えたことを特徴とする請求項1〜3のいずれか1つに記載の光走査装置。
【請求項5】
前記ずれ量検出部において、前記ずれ量が前記第1閾値より大きいことを検出する前に、又は、前記新たなテーブルの生成が完了する前に、前記ずれ量が前記第2閾値より大きいこと検出する場合、前記光源部からのレーザ光の投光を停止させることを特徴とする請求項1〜4のいずれか1つに記載の光走査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−3253(P2013−3253A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−132277(P2011−132277)
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]