
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ビームの照射対象領域内で光ビームをリサージュ走査する光走査装置に関する。
【背景技術】
【0002】
従来から、光ビームの照射対象領域内で光ビームをリサージュ走査する光走査装置が知られている。この種の光走査装置としては、例えば、光ビームを予め設定された投光タイミングで投光する光源部と、二次元ガルバノミラーで構成される光走査部と、光走査部を駆動する走査制御部とを備えて構成されたものがあり(例えば、特許文献1参照)、例えば、照射対象領域内で光ビームをリサージュ走査して照射対象領域内に存在する対象物までの距離を計測する光測距装置等の光走査手段として用いられている。
【0003】
この種の光走査装置において、走査制御部は、例えば、二次元ガルバノミラーの各揺動方向の共振周波数と合わせて初期設定された駆動周波数で光走査部を駆動させている。また、光源部から投光される光ビームの投光タイミングは、初期設定された駆動周波数に応じて定まるリサージュ走査軌跡に沿う光ビームが、照射対象領域に予め定める各画素に照射可能に初期設定されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−175005号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の光走査装置においては、リサージュ走査式の光走査部で走査された光ビームを、照射対象領域に設定する各画素に均等に照射するには、その投光タイミングのテーブルを予め定め記憶部等に記憶させておかなければならず改良の余地があった。
【0006】
そこで、本発明は上記課題に着目してなされたもので、投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる光走査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による光走査装置は、反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、該反射ミラーに入射される光ビームの照射対象領域内で該光ビームをリサージュ走査可能に形成された光走査部と、前記反射ミラーの各軸回りの揺動位相をそれぞれ検出する位相検出部と、前記反射ミラーに向かって光ビームを投光する光源部と、前記第2軸回りの揺動周期である第2揺動周期の半周期における前記光ビームのリサージュ走査軌跡に、前記第1軸回りの走査方向で互いに略平行な走査線対が存在するように、前記第1軸回りの揺動周期である第1揺動周期と前記第2揺動周期とを設定し、前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を一定量ずつ変化させて、前記光走査部を駆動させる走査制御部と、前記位相検出部で検出する前記揺動位相に基づいて、前記走査線対の走査時に対応する位相区間だけ、前記光源部から前記光ビームを投光させる前記光源制御部と、を備えて構成する。
【発明の効果】
【0008】
本発明の光走査装置によれば、互いに直交する第1軸及び第2軸の各軸回りに揺動可能な反射ミラーに入射される光ビームを照射対象領域内でリサージュ走査可能な光走査部の、第2揺動周期(第2軸回りの揺動周期)の半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対が存在するように、第1揺動周期(第1軸回りの揺動周期)と第2揺動周期とを設定すると共に、第2揺動周期の半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、各軸回りの揺動位相に基づいて、走査線対の走査時に対応する位相区間だけ、光源部から光ビームを投光させる構成であるため、第2揺動周期の半周期毎に、第2軸回りの走査方向についての、リサージュ走査軌跡の偏平度を変化させることができ、各走査線対の走査時に光ビームを投光させることができる。したがって、単に、上記位相区間内において一定位相刻みで光ビームを投光するだけで、リサージュ走査においても、ラスター走査と同様の点順次走査により光ビームを照射対象領域全体に渡って照射することができる。これにより、光ビームの投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる。
【図面の簡単な説明】
【0009】
【図1】本発明による光走査装置の一実施形態を示すブロック図である。
【図2】上記実施形態において使用される光走査部の一構成例を示す斜視図である。
【図3】上記光走査部による光ビームのリサージュ走査軌跡を示す説明図である。
【図4】上記実施形態において使用される位相検出部の一構成例を示す側面図である。
【図5】上記光走査部のX軸回りの走査振幅の変化を示す説明図である。
【図6】上記光走査部のY軸回りの走査振幅の変化を示す説明図である。
【図7】本実施形態の位相検出部の位相情報に基づいて光源部から光ビームを投光する区間を説明する図であり、(a)は図5の部分拡大図であり、(b)は図6の部分拡大図である。
【図8】上記光走査部によるリサージュ走査軌跡の偏平度を変化させた状況を示す説明図である。
【図9】上記光走査部による照射対象領域全体についての走査完了後のリサージュ走査軌跡を示す図である。
【図10】上記光走査部による照射対象領域全体についての走査完了後の別のリサージュ走査軌跡を示す図である。
【図11】上記実施形態の動作を説明するフローチャートである。
【図12】上記光走査部に調整部を設け、図9のリサージュ走査軌跡全体を傾けた状況を示す図である。
【図13】上記光走査部による光ビームの別のリサージュ走査軌跡を示す説明図である。
【図14】上記光走査部による光ビームのさらに別のリサージュ走査軌跡を示す説明図である。
【図15】上記光走査部の他の構成例を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
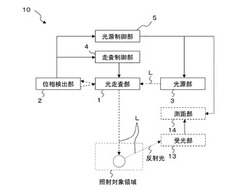
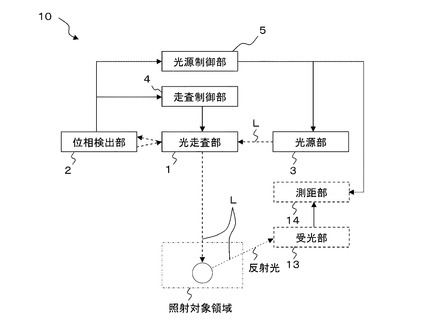
図1は、本発明による光走査装置の一実施形態を示すブロック図である。
図1において、本実施形態の光走査装置10は、反射ミラーに入射するレーザ光を、レーザ光の照射対象領域(以下において、単に「対象領域」と言う)内でリサージュ走査するものである。以下の説明では、光走査装置を、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する物体までの距離を計測する光測距装置の光走査手段として用いる場合で説明する。
【0011】
本実施形態による光走査装置10は、光走査部1と、位相検出部2と、光源部3と、走査制御部4と、光源制御部5とを備えて構成する。
【0012】
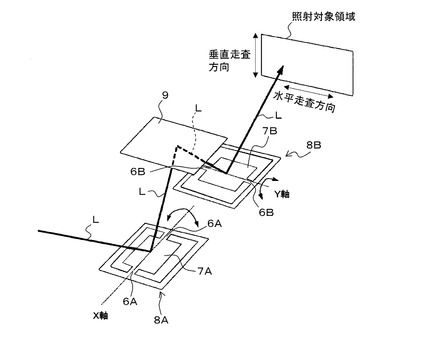
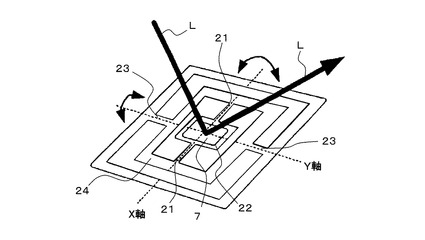
上記光走査部1は、反射ミラーを互いに直交する第1軸(X軸)及び第2軸(Y軸)の各軸回りに揺動し、この反射ミラーが揺動することによって、反射ミラーに入射されるレーザ光Lを対象領域内でリサージュ走査可能に形成されたものであり、走査制御部4により駆動制御される。光走査部1は、例えば、図2に示すように、反射ミラー7Aが一対のトーションバー6A,6Aによって揺動可能に支持されたX軸走査デバイス8A、及び反射ミラー7Bが一対のトーションバー6B,6Bによって揺動可能に支持されたY軸走査デバイス8Bの二つの走査デバイスを備え、各走査デバイス8A,8Bのトーションバー6A,6Bの軸線が互いに直交するように組み合わせて構成する。
【0013】
ここで、本実施形態においては、X軸走査デバイス8Aが図2に示す対象領域の水平走査方向の走査ミラーとなり、Y軸走査デバイス8Bが図2に示す垂直走査方向の走査ミラーとなるように配置されている。すなわち、本実施形態においては、第1軸(X軸)回りの走査方向が対象領域の水平走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の垂直走査方向に対応するものとして、以下説明する。
【0014】
具体的には、反射ミラー7Aによる対象領域おける水平走査方向の走査座標Xは、例えば、下記の(1)式のように表せる。
X=Ax・sin(2πt/Tx−θ0)・・・(1)
また、反射ミラー7Bによる対象領域おける垂直走査方向の走査座標Yは、例えば、下記の(2)式のように表せる。
Y=Ay・sin(2πt/Ty−θ0)・・・(2)
ここで、Axは反射ミラー7Aの走査振幅であり、Ayは反射ミラー7Bの走査振幅であり、tは走査開始基準点(t=0)からの経過時間(時刻)であり、TxはX軸回りの揺動周期であり、TyはY軸回りの揺動周期であり、θ0は走査開始基準点(t=0)における揺動の位相であり、t=0におけるX軸回りの位相とY軸回りの位相は同じである。
【0015】
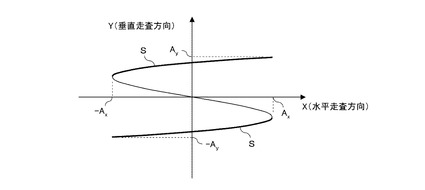
なお、Tx及びTyは、後述するように、走査制御部4によって、例えば、TyがTxの3倍になるように設定されている。この場合、Ax>Ayに設定すると、光走査部1によるレーザ光Lのリサージュ走査軌跡は、図3に示すような、Y軸回りの走査方向につぶれた扁平なS字状となり、このS字のリサージュ走査軌跡の偏平度は、例えば、Ay/Axと表すことができる。なお、本実施形態において、Txが本発明に係る第1揺動周期に相当し、Tyが本発明に係る第2揺動周期に相当する。
【0016】
また、図2においては、X軸走査デバイス8A及びY軸走査デバイス8Bの各反射ミラー7A,7Bを共に上方に向けて配置し、各反射ミラー7A,7Bと対向して平面ミラー9を配置し、X軸走査デバイス8Aの反射ミラー7Aで反射されたレーザ光Lを平面ミラー9で受けて、これをY軸走査デバイス8Bに向けて反射するようになっているが、X軸走査デバイス8A及びY軸走査デバイス8Bの各反射ミラー7A,7Bを平行に、且つ互いに内側を向くように配置し、X軸走査デバイス8Aの反射ミラー7Aで反射したレーザ光LをY軸走査デバイス8Bの反射ミラー7Bで直接受けるようにしてもよい。また、走査デバイスの駆動方式としては、電磁駆動方式、静電駆動方式、又は圧電駆動方式等いずれの方式であってもよく、公知の技術を適用することができる。
【0017】
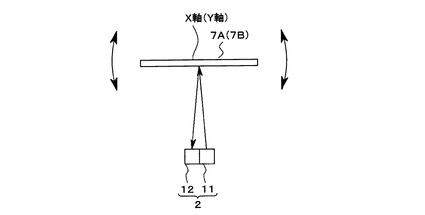
上記位相検出部2は、反射ミラーのX軸及びY軸回りの揺動位相θをそれぞれ検出するものであり、例えば、図4に示すように反射ミラー7A,7Bの裏面側にて揺動軸(X軸、Y軸)の真下に設けられたLED等の発光素子11と、反射ミラー7A,7Bの裏面で反射した発光素子11からの光を受光する受光素子12とを備えて構成し、発光素子11から投光された光の反射ミラー7A,7B裏面における反射光を受光素子12により受光して、その受光量の変化から反射ミラー7A,7Bの揺動の位相情報を取得し、走査制御部4及び光源制御部5に出力するように構成されている。この位相検出部2から出力する位相情報は、例えば、反射ミラー7A,7Bの揺動周期Tx,Tyの1/2周期でピーク出力が現れる正弦波信号である。このピーク出力時に、反射ミラー7A,7Bは水平な状態になっている。
【0018】
上記光源部3は、反射ミラー7Aに向かってパルス状のレーザ光Lを投光するものであり、例えば、図示省略するが光源と投光光学系とを含んで構成されている。光源は、例えばレーザダイオードであり、後述するように位相情報に基づく光源制御部5からの指令によって発光してパルス状のレーザ光Lを出射する。投光光学系は、例えば、コリメータレンズを含み、光源が発したレーザ光Lを平行光に変換する。
【0019】
この光源部3から投光されたレーザ光Lは、反射ミラー7A,7Bで反射走査され対象領域内でリサージュ走査される。反射ミラー7A,7Bで反射走査されたレーザ光Lが対象領域内に存在する物体によって反射されたレーザ光L(反射光)は、例えば、光測距装置の受光部13(例えば、フォトセンサ)で受光される。そして、この受光部13による反射光の受光タイミングと光源制御部5からのレーザ光Lの投光指令信号は光測距装置の測距部14に入力される。これにより、光測距装置の測距部14は、例えば、光源制御部5からの投光指令信号の入力タイミングと受光タイミングとの時間差に基づいて対象領域内に存在する物体までの距離を計測する。このようにして、本実施形態による光走査装置1は、光測距装置の光走査手段として用いられる。
【0020】
上記走査制御手段4は、光走査部1の駆動を制御するものであり、第2揺動周期Tyの半周期におけるレーザ光Lのリサージュ走査軌跡に、X軸回りの走査方向(図2に示す水平走査方向)で互いに略平行な走査線対S,Sが存在するように、第1揺動周期Txと第2揺動周期Tyとを設定し、第2揺動周期Tyの半周期毎に、Y軸回りの走査振幅Ayを一定量ΔAyずつ変化させて、光走査部2を駆動させるように構成されている。
【0021】
具体的には、走査制御部4は、例えば、図5及び図6に示すように、第2揺動周期Tyを第1揺動周期Txの3倍に設定(換言すると、X軸回りの揺動周波数fxをY軸回りの揺動周波数fyの3倍に設定)し、走査開始基準点(t=0)における各軸回りの揺動位相θ0を一致させ、各走査デバイス8A,8Bにそれぞれの揺動周期及び後述する最大走査振幅に対応させた駆動信号を入力する。これにより、図3に示すように、レーザ光Lのリサージュ走査軌跡に、X軸回りの走査方向(水平走査方向)で互いに略平行な走査線対S,S(図3の太線で示した走査線)が存在するようにすることができる。
【0022】
例えば、各軸回りの揺動位相θ0が3π/4のときを時刻tの始まりとして起算する場合、反射ミラー7Aによる対象領域おける水平走査方向の走査座標Xは、下記の(3)式のように表せる。
X=Ax・sin(2πt/Tx−3π/4)・・・(3)
また、反射ミラー7Bによる対象領域おける垂直走査方向の走査座標Yは、下記の(4)式のように表せる。
Y=Ay・sin(2πt/3Tx−3π/4)・・・(4)
【0023】
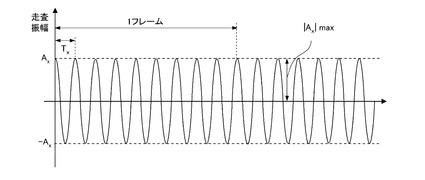
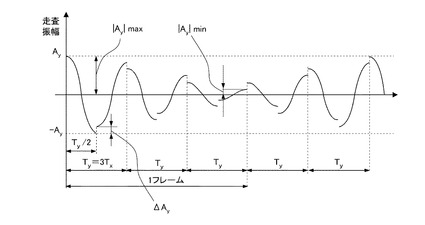
また、走査制御部4は、上記のように、リサージュ走査軌跡に走査線対S,Sを含むように各軸回りの揺動周期を設定すると共に、例えば、X軸回りについては一定の走査振幅Ax(最大振幅値|Ax|max)で揺動させ、Y軸回りについては第2揺動周期Tyの半周期毎に、第2軸回りの走査振幅Ayを所定の最大振幅値|Ay|maxと所定の最小振幅値|Ay|minとの間で一定量ΔAyずつ変化させて揺動させるように構成する。
【0024】
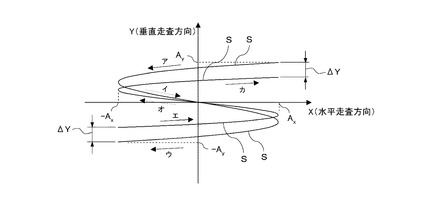
より具体的には、走査制御部4は、図5〜図7に示すように、最大振幅値|Ax|max及び最大振幅値|Ay|maxで、X軸回り及びY軸回りの揺動をそれぞれ開始させ、第2揺動周期Tyの半周期のときに、Y軸回りについては走査振幅Ayを一定量ΔAy減じて変化させる。これにより、リサージュ走査軌跡の偏平度Ay/Axを変化させることができるため、図8に示すように、第2揺動周期Tyの半周期のときに、走査線対S,SがあたかもY軸回りの走査方向(垂直走査方向)にそれぞれ略一定距離ΔYずつシフトするように、光走査部2の駆動を制御することができる。
【0025】
ここで、走査線対S,Sのシフト量(一定距離)ΔYは、第2揺動周期Tyの半周期毎の走査振幅Ayの変化量ΔAyと一致する。したがって、シフト量ΔYは、対象領域内で要求される水平走査方向の走査線数に応じて、走査振幅Ayの変化量ΔAyを調整することで、適宜設定することができる。なお、走査制御部4は、第2揺動周期Tyの半周期に走査が終了したか否かの判定を、例えば、位相検出部2から入力されるY軸回りの位相情報に基づいて行い、第2軸回りの走査振幅Ayを変化させるタイミングを決定する。
【0026】
走査制御部4は、図8に示すリサージュ走査軌跡の偏平度制御を、第2揺動周期Tyの半周期毎に行い、図6に示すように、Y軸回りの走査振幅Ayが最小振幅値|Ay|minと一致したときに対象領域全体についての走査(1フレーム)を完了させ、次の走査のY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から、実行させる。
【0027】
なお、図6においては、図の明瞭化のためΔAyの大きさを誇張して示したため、第2揺動周期Tyの半周期毎の振幅の段差が誇張されているが、実際はこの段差が微小になるように、ΔAyが設定されている。同様に、図6においては、図の明瞭化のため|Ay|minを大きく示したが、例えば、|Ay|min=0にして、対象領域の垂直走査方向の座標Y=0を走査するようにするとよい。このようにΔAy及び|Ay|minを設定することにより、図9に示すように、水平走査方向で互いに略平行な走査線対S,Sが垂直走査方向に密に存在する走査軌跡で、レーザ光を対象領域でリサージュ走査することができる。
【0028】
また、1フレームに要する時間(フレームレート)は、走査振幅Ayを変化させる一定量ΔAyが小さくなるほど長くなり、一定量ΔAyが大きくなるほど短くなる。このように、ΔAyの値を調整するだけで、フレームレートを容易にコントロールすることができる。
【0029】
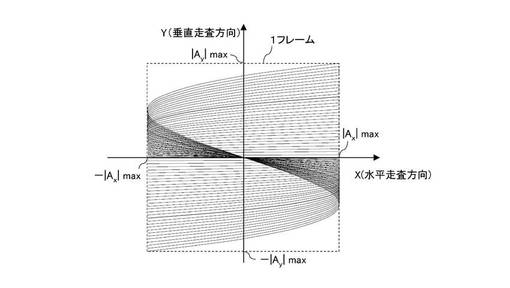
そして、Y軸回りの最大振幅値|Ay|maxを図9で設定した値より大きくした場合、図10に示すように1フレーム完了後のリサージュ走査軌跡全体の領域を、水平走査方向の走査線の密度を変えないで、容易に広げることができる。
【0030】
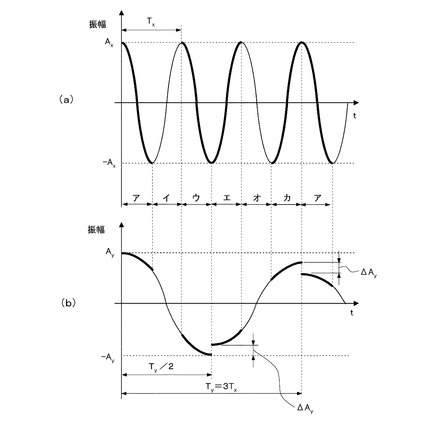
上記光源制御部5は、レーザ光を投光するように光源部3に指令するものであり、位相検出部2で検出する揺動位相に基づいて、走査線対S,Sの走査時に対応する位相区間(図7(a)及び図7(b)の太線に対応するア,ウ,エ,カの区間)だけ、光源部3からレーザ光を投光させるように構成されている。ここで、図7(a)及び図7(b)のア〜カで示した各位相区間は、図8に、走査方向を示す矢印と共に示したア〜カの走査軌跡にそれぞれ対応している。光源制御部5は、例えば、位相検出部2で検出された揺動位相の検出値が、ア,ウ,エ,カの位相区間内であるか否かを判定し、位相区間内であると判定した場合、位相検出部2の揺動位相の検出値が、レーザ光の投光タイミングとして予め定めた、一定位相刻みΔθの揺動位相と一致したときに、レーザ光を投光するように光源部3に指令するように構成する。この一定位相刻みΔθは、例えば、対象領域にマトリクス状に予め定めた各画素の間隔に対応させて設定されている。これにより、第2揺動周期Tyの半周期毎に、対象領域の水平走査方向で互いに略平行な走査線対S,S上で上記予め定めた位相刻みΔθに応じた照射位置間隔でレーザ光を対象領域に照射することができる。
【0031】
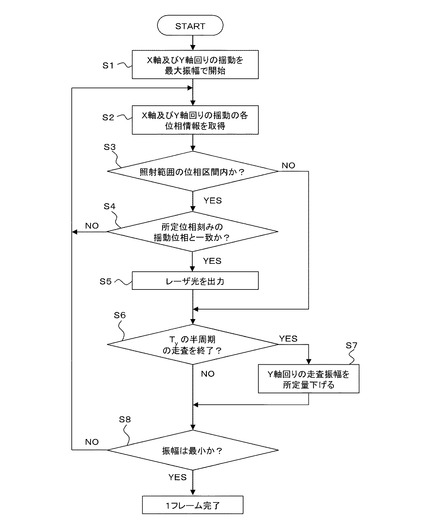
次に、本実施形態に係る光走査装置10の動作について、図10のフローチャートを参照して説明する。
【0032】
先ず、ステップS1において、装置の起動スイッチの投入により、走査制御部4の駆動制御に基づき、光走査部1のX軸及びY軸回りの揺動を、最大振幅値|Ax|max及び最大振幅値|Ay|maxで開始する。
【0033】
ステップS2において、位相検出部2はX軸及びY軸回りの揺動の各揺動位相を検出し、その位相情報を光源制御部5に出力し、光源制御部5は各軸回りの位相情報を取得する。
【0034】
ステップS3において、光源制御部5は、位相検出部2からの揺動位相の検出値が、レーザ光の照射範囲の位相区間(ア,ウ,エ,カの位相区間)内であるか否かを判定する。ここで、照射範囲の位相区間内であると判定した場合は、ステップS4に進む。なお、照射範囲の位相区間内ではないと判定した場合(すなわち、イ及びオの区間である場合)は、ステップS6に進む。
【0035】
ステップS4において、光源制御部5は、位相検出部2からの揺動位相の検出値が、照射範囲の位相区間内で、予め定めた一定位相刻みの揺動位相と一致するか否かを判定する。ここで、検出値が予め定めた一定位相刻みの揺動位相と一致すると判定した場合は、光源制御部5は、レーザ光を投光するように光源部3に指令し、ステップS5に進む。
【0036】
ステップS5において、光源部3は、レーザ光を出力し、ステップS6に進む。なお、ステップS4において、光源制御部5は、検出値が予め定めた一定位相刻みの揺動位相と一致しないと判定した場合は、ステップS2に戻る。
【0037】
ステップS6において、走査制御部4は、第2揺動周期Tyの半周期の走査が終了したか否かの判定を、例えば、位相検出部2から入力されるY軸回りの位相情報に基づいて行う。ここで、第2揺動周期Tyの半周期の走査が終了したと判定した場合は、ステップS7に進む。なお、ステップS6において、第2揺動周期Tyの半周期の走査が終了していないと判定した場合は、ステップS8に進む。
【0038】
ステップS7において、走査制御部4は、例えば、Y軸走査デバイス8Bに入力する駆動信号の大きさ(例えば、電流値または電圧値)を一定量だけ小さくすることにより、図7(b)に示すように、Y軸回りの走査振幅Ayを予め設定された一定量ΔAyだけ小さくし、次の半周期(Ty/2)の走査を開始し、ステップS8に進む。
【0039】
ステップS8において、走査制御部4は、Y軸回りの走査振幅Ayが最小振幅値|Ay|minと一致するか否かを判定する。走査振幅Ayの最小は、例えば、Y軸走査デバイス8Bに入力している駆動信号の大きさ(電流値または電圧値)が、最小振幅値|Ay|minに対応する値(電流値または電圧値)と一致するか否かを判定することにより行う。ここで、走査振幅Ayが最小振幅値|Ay|minと一致しないと判定した場合、ステップS2に戻る。一方、一致すると判定した場合、1フレーム分の走査が完了する。
【0040】
なお、図示省略するが、引き続き走査を行う場合は、例えば、次のフレームのY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から実行させる。この場合、Y軸回りの走査振幅Ayが最大振幅値|Ay|maxと一致したところで1フレーム分の走査が完了し、さらに走査を行う場合は、前述したステップS1〜S8までの動作を行う。これらの動作を繰り返すことにより、1フレーム分の走査を所定回数行うことができる。
【0041】
このような構成により、本実施形態に係るレーザ計測装置1は、第2揺動周期Tyの半周期におけるリサージュ走査軌跡に、X軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、第1揺動周期Txと第2揺動周期Tyとを設定すると共に、第2揺動周期Tyの半周期毎に第2軸回りの走査振幅幅Ayを一定量ΔAyずつ変化させ、各軸回りの揺動位相に基づいて、走査線対S,Sの走査時に対応する位相区間だけ、光源部3からレーザ光を投光させる構成であるため、第2揺動周期Tyの半周期毎に、Y軸回りの走査方向についての、リサージュ走査軌跡の偏平度を変化させることができ、各走査線対S,Sの走査時に光ビームを投光させることができる。したがって、単に、上記位相区間内において一定位相刻みで光ビームを投光するだけで、リサージュ走査においても、ラスター走査と同様の点順次走査により光ビームを照射対象領域全体に渡って照射することができる。これにより、光ビームの投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる。
【0042】
また、本実施形態のように、第2揺動周期Tyを第1揺動周期Txの3倍に設定した場合、図9に示す1フレーム中において、実際にレーザ光を照射するための有効な走査時間は、図8に示すア,ウ,エ,カの走査に要する時間となる。したがって、1フレームに要する時間をTとした場合、有効な走査時間を2/3Tとすることができる。
【0043】
また、本実施形態のように、Y軸回りの走査振幅Ayを最大振幅値|Ay|maxから一定量ずつ最小振幅値|Ay|minまで減少させて1フレーム分の走査を完了させ、次の1フレームのY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から、実行させるように構成することにより、次のフレームへの移行時に、Y軸回りの走査振幅が大きく変わることがないため、例えば、走査振幅の急な変化に起因する装置内部からのノイズの発生を抑制することができ、また、Y軸デバイス8B等への衝撃も抑制することができる。なお、図示省略するが次の1フレームの実行は、最小振幅値|Ay|minから行ってもよい。この場合、次のフレームへの移行時における走査振幅の変化はないため、フレーム移行時における走査振幅の変化に起因するノイズ及びY軸デバイス8bへの衝撃を無くすことができると共に、各フレームにおける走査線対S,Sの数を完全に一致させることができる。
【0044】
また、本実施形態とは逆に、Y軸回りの走査振幅Ayを最小振幅値|Ay|minから一定量ずつ最大振幅値|Ay|maxまで増加させて1フレーム分の走査を完了させ、次の1フレームのY軸回りの揺動を、最大振幅値|Ay|maxより一定量減少させた振幅値から、又は、最大振幅値|Ay|maxから実行させるようにしても、ノイズ及び衝撃の抑制、又は、防止することができる。
【0045】
なお、本実施形態においては、走査制御部4は、上記のように、次のフレームへの移行時に、Y軸回りの走査振幅Ayが大きく変わることがないように構成した場合で説明したが、これに限らず、最大振幅値|Ay|max又は最小振幅値|Ay|minのいずれか一方の振幅値で、Y軸回りの揺動を開始させ、第2揺動周期Tyの半周期毎にY軸回りの走査振幅Ayを一定量ずつ変化させ、この走査振幅Ayが他方の振幅値と一致したときに対象領域全体についての走査を完了させ、次の走査のY軸回りの揺動を一方の振幅値から実行させる構成であってもよい。
【0046】
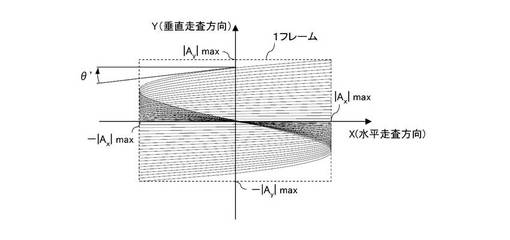
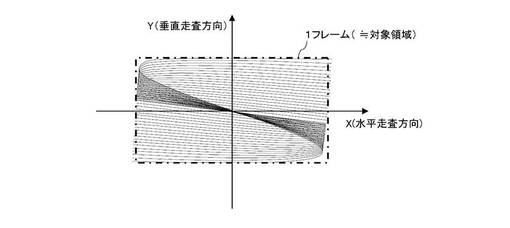
また、本実施形態においては、図9に示すように、走査線対S,Sが対象領域における水平走査方向に対して角度θ’だけ傾いた状態でリサージュ走査した場合で説明したが、これに限らず、図12に示すように、走査線対S,Sが対象領域における水平走査方向と略平行になる状態でリサージュ走査可能にしてもよい。
【0047】
この場合、具体的には、水平走査方向と走査線対S,Sとが略平行になるように、対象領域に対する光走査部1の設置角度を調整する調整部(図示省略)を光走査部2等に備えて構成する。調整部は、図示省略するが、例えば、光走査部1によるリサージュ走査軌跡全体が角度θ’だけ回転するように、各デバイス8A,8B全体を回転可能に構成する。このように、走査線対S,Sを対象領域における水平走査方向と略平行になるように調整することにより、1フレーム走査後の走査軌跡全体を略矩形状にすることができる。これにより、図12に示すように、矩形状の対象領域と走査軌跡全体の領域を略一致させることができ、より効率的に矩形状の対象領域を走査することができる。
【0048】
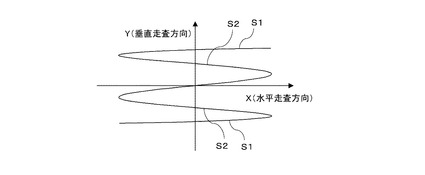
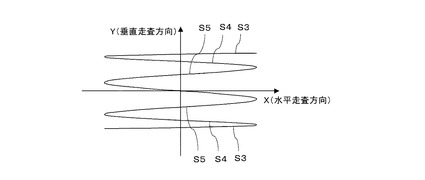
また、本実施形態においては、光走査部2は、図3等に示すように、S字状の走査軌跡を描く場合で説明したが、これに限らず、例えば、図13に示すS字状の走査軌跡を2つ組み合わせた走査軌跡や、図14に示すS字状の走査軌跡を3つ組み合わせた走査軌跡等の、S字状の走査軌跡をN個組み合わせた走査軌跡を描くようにしてもよい。これらの場合、走査制御部4は、第2揺動周期Tyを第1揺動周期Txの奇数倍に設定するように構成する。例えば、図13の場合は、第2揺動周期Tyを第1揺動周期Txの5倍に設定し、図14の場合は、第2揺動周期Tyを第1揺動周期Txの7倍に設定する。このように、S字状の走査軌跡をN個組み合わせた走査軌跡を描くには、Ty=(2N+1)・Txとなるように第2揺動周期Tyと第1揺動周期Txを設定すればよい。なお、走査線対S,Sは、例えば、図13の場合、S1,S1及びS2,S2の2対あり、図14の場合、S3,S3、S4,S4及びS5,S5の3対あり、それぞれの場合において、レーザ光照射用の走査線としていずれの走査線対を用いてもよい。
【0049】
そして、本実施形態においては、光走査部1は、X軸走査デバイス8AとY軸走査デバイス8Bとを組み合わせて構成した場合について説明したが、これに限られず、図15に示すように、光走査部1は、内側トーションバー21によって揺動可能に支持され、表面中央部に反射ミラー7を形成した内側可動部22と、該内側可動部22を取り囲んで枠状に形成され、内側トーションバー21を支持すると共に該内側トーションバー21の軸線に対して直交方向に延びる外側トーションバー23によって揺動可能に支持された外側可動部24と、を備えて構成したものであってもよい。
【0050】
また、本実施形態においては、第1軸(X軸)回りの走査方向が対象領域の水平走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の垂直走査方向に対応する場合で説明したが、これに限らず、第1軸(X軸)回りの走査方向が対象領域の垂直走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の水平走査方向に対応するように、各走査デバイス8A,8Bを配置する構成であってもよい。この場合、走査軌跡は、図3に示すS字を90°回転させた軌跡となり、その走査軌跡に含まれる走査線対S,Sは水平走査方向に一定量ずつシフトされることになる。
【0051】
また、本実施形態においては、光ビームがレーザ光の場合について述べたが、これに限られず、光ビームは発光素子(LED)によるものであってもよい。
【0052】
そして、本実施形態において、光走査装置10を光測距装置の光走査手段として用いた場合で説明したが、光走査装置10は、これに限らず、レーザ走査型のプロジェクタにおける光走査手段としても用いることができる。この場合、光源部3は、外部から入力される映像信号に応じて強度変調された映像光を、例えば、走査方向が同一の図8に示すア及びウの走査線対S,S、又は、エ及びカの走査線対S,Sに対応する位相区間(図7参照)だけ、照射するように構成することにより、例えば、ブラウン管(CRT)と同様の点順次走査により映像を表示することができる。なお、ラスタースキャン用の映像信号は、例えば、ブラウン管の垂直方向に一定間隔で位置する水平方向の各ラスター走査線の並び順で入力されるため、1フレーム分の映像信号を一旦メモリ等に記憶させ、各走査線対S,Sの走査順に合わせて各ラスター走査線の映像信号の並びを入れ替えるように構成する。なお、光走査装置10をプロジェクタの光走査手段として用いる場合は、光ビームとしてRGBの三色光を使用すればカラー表示も可能である。
【符号の説明】
【0053】
1・・・・・・・光走査部
2・・・・・・・位相検出部
3・・・・・・・光源部
4・・・・・・・走査制御部
5・・・・・・・光源制御部
6A,6B・・・トーションバー
7A,7B,7・反射ミラー
8A,8B・・・走査デバイス
10・・・・・・光走査装置
21・・・・・・内側トーションバー
22・・・・・・内側可動部
23・・・・・・外側トーションバー
24・・・・・・外側可動部
【技術分野】
【0001】
本発明は、光ビームの照射対象領域内で光ビームをリサージュ走査する光走査装置に関する。
【背景技術】
【0002】
従来から、光ビームの照射対象領域内で光ビームをリサージュ走査する光走査装置が知られている。この種の光走査装置としては、例えば、光ビームを予め設定された投光タイミングで投光する光源部と、二次元ガルバノミラーで構成される光走査部と、光走査部を駆動する走査制御部とを備えて構成されたものがあり(例えば、特許文献1参照)、例えば、照射対象領域内で光ビームをリサージュ走査して照射対象領域内に存在する対象物までの距離を計測する光測距装置等の光走査手段として用いられている。
【0003】
この種の光走査装置において、走査制御部は、例えば、二次元ガルバノミラーの各揺動方向の共振周波数と合わせて初期設定された駆動周波数で光走査部を駆動させている。また、光源部から投光される光ビームの投光タイミングは、初期設定された駆動周波数に応じて定まるリサージュ走査軌跡に沿う光ビームが、照射対象領域に予め定める各画素に照射可能に初期設定されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−175005号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の光走査装置においては、リサージュ走査式の光走査部で走査された光ビームを、照射対象領域に設定する各画素に均等に照射するには、その投光タイミングのテーブルを予め定め記憶部等に記憶させておかなければならず改良の余地があった。
【0006】
そこで、本発明は上記課題に着目してなされたもので、投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる光走査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による光走査装置は、反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、該反射ミラーに入射される光ビームの照射対象領域内で該光ビームをリサージュ走査可能に形成された光走査部と、前記反射ミラーの各軸回りの揺動位相をそれぞれ検出する位相検出部と、前記反射ミラーに向かって光ビームを投光する光源部と、前記第2軸回りの揺動周期である第2揺動周期の半周期における前記光ビームのリサージュ走査軌跡に、前記第1軸回りの走査方向で互いに略平行な走査線対が存在するように、前記第1軸回りの揺動周期である第1揺動周期と前記第2揺動周期とを設定し、前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を一定量ずつ変化させて、前記光走査部を駆動させる走査制御部と、前記位相検出部で検出する前記揺動位相に基づいて、前記走査線対の走査時に対応する位相区間だけ、前記光源部から前記光ビームを投光させる前記光源制御部と、を備えて構成する。
【発明の効果】
【0008】
本発明の光走査装置によれば、互いに直交する第1軸及び第2軸の各軸回りに揺動可能な反射ミラーに入射される光ビームを照射対象領域内でリサージュ走査可能な光走査部の、第2揺動周期(第2軸回りの揺動周期)の半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対が存在するように、第1揺動周期(第1軸回りの揺動周期)と第2揺動周期とを設定すると共に、第2揺動周期の半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、各軸回りの揺動位相に基づいて、走査線対の走査時に対応する位相区間だけ、光源部から光ビームを投光させる構成であるため、第2揺動周期の半周期毎に、第2軸回りの走査方向についての、リサージュ走査軌跡の偏平度を変化させることができ、各走査線対の走査時に光ビームを投光させることができる。したがって、単に、上記位相区間内において一定位相刻みで光ビームを投光するだけで、リサージュ走査においても、ラスター走査と同様の点順次走査により光ビームを照射対象領域全体に渡って照射することができる。これにより、光ビームの投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる。
【図面の簡単な説明】
【0009】
【図1】本発明による光走査装置の一実施形態を示すブロック図である。
【図2】上記実施形態において使用される光走査部の一構成例を示す斜視図である。
【図3】上記光走査部による光ビームのリサージュ走査軌跡を示す説明図である。
【図4】上記実施形態において使用される位相検出部の一構成例を示す側面図である。
【図5】上記光走査部のX軸回りの走査振幅の変化を示す説明図である。
【図6】上記光走査部のY軸回りの走査振幅の変化を示す説明図である。
【図7】本実施形態の位相検出部の位相情報に基づいて光源部から光ビームを投光する区間を説明する図であり、(a)は図5の部分拡大図であり、(b)は図6の部分拡大図である。
【図8】上記光走査部によるリサージュ走査軌跡の偏平度を変化させた状況を示す説明図である。
【図9】上記光走査部による照射対象領域全体についての走査完了後のリサージュ走査軌跡を示す図である。
【図10】上記光走査部による照射対象領域全体についての走査完了後の別のリサージュ走査軌跡を示す図である。
【図11】上記実施形態の動作を説明するフローチャートである。
【図12】上記光走査部に調整部を設け、図9のリサージュ走査軌跡全体を傾けた状況を示す図である。
【図13】上記光走査部による光ビームの別のリサージュ走査軌跡を示す説明図である。
【図14】上記光走査部による光ビームのさらに別のリサージュ走査軌跡を示す説明図である。
【図15】上記光走査部の他の構成例を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は、本発明による光走査装置の一実施形態を示すブロック図である。
図1において、本実施形態の光走査装置10は、反射ミラーに入射するレーザ光を、レーザ光の照射対象領域(以下において、単に「対象領域」と言う)内でリサージュ走査するものである。以下の説明では、光走査装置を、例えば、レーザ光を対象領域内でリサージュ走査して対象領域内に存在する物体までの距離を計測する光測距装置の光走査手段として用いる場合で説明する。
【0011】
本実施形態による光走査装置10は、光走査部1と、位相検出部2と、光源部3と、走査制御部4と、光源制御部5とを備えて構成する。
【0012】
上記光走査部1は、反射ミラーを互いに直交する第1軸(X軸)及び第2軸(Y軸)の各軸回りに揺動し、この反射ミラーが揺動することによって、反射ミラーに入射されるレーザ光Lを対象領域内でリサージュ走査可能に形成されたものであり、走査制御部4により駆動制御される。光走査部1は、例えば、図2に示すように、反射ミラー7Aが一対のトーションバー6A,6Aによって揺動可能に支持されたX軸走査デバイス8A、及び反射ミラー7Bが一対のトーションバー6B,6Bによって揺動可能に支持されたY軸走査デバイス8Bの二つの走査デバイスを備え、各走査デバイス8A,8Bのトーションバー6A,6Bの軸線が互いに直交するように組み合わせて構成する。
【0013】
ここで、本実施形態においては、X軸走査デバイス8Aが図2に示す対象領域の水平走査方向の走査ミラーとなり、Y軸走査デバイス8Bが図2に示す垂直走査方向の走査ミラーとなるように配置されている。すなわち、本実施形態においては、第1軸(X軸)回りの走査方向が対象領域の水平走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の垂直走査方向に対応するものとして、以下説明する。
【0014】
具体的には、反射ミラー7Aによる対象領域おける水平走査方向の走査座標Xは、例えば、下記の(1)式のように表せる。
X=Ax・sin(2πt/Tx−θ0)・・・(1)
また、反射ミラー7Bによる対象領域おける垂直走査方向の走査座標Yは、例えば、下記の(2)式のように表せる。
Y=Ay・sin(2πt/Ty−θ0)・・・(2)
ここで、Axは反射ミラー7Aの走査振幅であり、Ayは反射ミラー7Bの走査振幅であり、tは走査開始基準点(t=0)からの経過時間(時刻)であり、TxはX軸回りの揺動周期であり、TyはY軸回りの揺動周期であり、θ0は走査開始基準点(t=0)における揺動の位相であり、t=0におけるX軸回りの位相とY軸回りの位相は同じである。
【0015】
なお、Tx及びTyは、後述するように、走査制御部4によって、例えば、TyがTxの3倍になるように設定されている。この場合、Ax>Ayに設定すると、光走査部1によるレーザ光Lのリサージュ走査軌跡は、図3に示すような、Y軸回りの走査方向につぶれた扁平なS字状となり、このS字のリサージュ走査軌跡の偏平度は、例えば、Ay/Axと表すことができる。なお、本実施形態において、Txが本発明に係る第1揺動周期に相当し、Tyが本発明に係る第2揺動周期に相当する。
【0016】
また、図2においては、X軸走査デバイス8A及びY軸走査デバイス8Bの各反射ミラー7A,7Bを共に上方に向けて配置し、各反射ミラー7A,7Bと対向して平面ミラー9を配置し、X軸走査デバイス8Aの反射ミラー7Aで反射されたレーザ光Lを平面ミラー9で受けて、これをY軸走査デバイス8Bに向けて反射するようになっているが、X軸走査デバイス8A及びY軸走査デバイス8Bの各反射ミラー7A,7Bを平行に、且つ互いに内側を向くように配置し、X軸走査デバイス8Aの反射ミラー7Aで反射したレーザ光LをY軸走査デバイス8Bの反射ミラー7Bで直接受けるようにしてもよい。また、走査デバイスの駆動方式としては、電磁駆動方式、静電駆動方式、又は圧電駆動方式等いずれの方式であってもよく、公知の技術を適用することができる。
【0017】
上記位相検出部2は、反射ミラーのX軸及びY軸回りの揺動位相θをそれぞれ検出するものであり、例えば、図4に示すように反射ミラー7A,7Bの裏面側にて揺動軸(X軸、Y軸)の真下に設けられたLED等の発光素子11と、反射ミラー7A,7Bの裏面で反射した発光素子11からの光を受光する受光素子12とを備えて構成し、発光素子11から投光された光の反射ミラー7A,7B裏面における反射光を受光素子12により受光して、その受光量の変化から反射ミラー7A,7Bの揺動の位相情報を取得し、走査制御部4及び光源制御部5に出力するように構成されている。この位相検出部2から出力する位相情報は、例えば、反射ミラー7A,7Bの揺動周期Tx,Tyの1/2周期でピーク出力が現れる正弦波信号である。このピーク出力時に、反射ミラー7A,7Bは水平な状態になっている。
【0018】
上記光源部3は、反射ミラー7Aに向かってパルス状のレーザ光Lを投光するものであり、例えば、図示省略するが光源と投光光学系とを含んで構成されている。光源は、例えばレーザダイオードであり、後述するように位相情報に基づく光源制御部5からの指令によって発光してパルス状のレーザ光Lを出射する。投光光学系は、例えば、コリメータレンズを含み、光源が発したレーザ光Lを平行光に変換する。
【0019】
この光源部3から投光されたレーザ光Lは、反射ミラー7A,7Bで反射走査され対象領域内でリサージュ走査される。反射ミラー7A,7Bで反射走査されたレーザ光Lが対象領域内に存在する物体によって反射されたレーザ光L(反射光)は、例えば、光測距装置の受光部13(例えば、フォトセンサ)で受光される。そして、この受光部13による反射光の受光タイミングと光源制御部5からのレーザ光Lの投光指令信号は光測距装置の測距部14に入力される。これにより、光測距装置の測距部14は、例えば、光源制御部5からの投光指令信号の入力タイミングと受光タイミングとの時間差に基づいて対象領域内に存在する物体までの距離を計測する。このようにして、本実施形態による光走査装置1は、光測距装置の光走査手段として用いられる。
【0020】
上記走査制御手段4は、光走査部1の駆動を制御するものであり、第2揺動周期Tyの半周期におけるレーザ光Lのリサージュ走査軌跡に、X軸回りの走査方向(図2に示す水平走査方向)で互いに略平行な走査線対S,Sが存在するように、第1揺動周期Txと第2揺動周期Tyとを設定し、第2揺動周期Tyの半周期毎に、Y軸回りの走査振幅Ayを一定量ΔAyずつ変化させて、光走査部2を駆動させるように構成されている。
【0021】
具体的には、走査制御部4は、例えば、図5及び図6に示すように、第2揺動周期Tyを第1揺動周期Txの3倍に設定(換言すると、X軸回りの揺動周波数fxをY軸回りの揺動周波数fyの3倍に設定)し、走査開始基準点(t=0)における各軸回りの揺動位相θ0を一致させ、各走査デバイス8A,8Bにそれぞれの揺動周期及び後述する最大走査振幅に対応させた駆動信号を入力する。これにより、図3に示すように、レーザ光Lのリサージュ走査軌跡に、X軸回りの走査方向(水平走査方向)で互いに略平行な走査線対S,S(図3の太線で示した走査線)が存在するようにすることができる。
【0022】
例えば、各軸回りの揺動位相θ0が3π/4のときを時刻tの始まりとして起算する場合、反射ミラー7Aによる対象領域おける水平走査方向の走査座標Xは、下記の(3)式のように表せる。
X=Ax・sin(2πt/Tx−3π/4)・・・(3)
また、反射ミラー7Bによる対象領域おける垂直走査方向の走査座標Yは、下記の(4)式のように表せる。
Y=Ay・sin(2πt/3Tx−3π/4)・・・(4)
【0023】
また、走査制御部4は、上記のように、リサージュ走査軌跡に走査線対S,Sを含むように各軸回りの揺動周期を設定すると共に、例えば、X軸回りについては一定の走査振幅Ax(最大振幅値|Ax|max)で揺動させ、Y軸回りについては第2揺動周期Tyの半周期毎に、第2軸回りの走査振幅Ayを所定の最大振幅値|Ay|maxと所定の最小振幅値|Ay|minとの間で一定量ΔAyずつ変化させて揺動させるように構成する。
【0024】
より具体的には、走査制御部4は、図5〜図7に示すように、最大振幅値|Ax|max及び最大振幅値|Ay|maxで、X軸回り及びY軸回りの揺動をそれぞれ開始させ、第2揺動周期Tyの半周期のときに、Y軸回りについては走査振幅Ayを一定量ΔAy減じて変化させる。これにより、リサージュ走査軌跡の偏平度Ay/Axを変化させることができるため、図8に示すように、第2揺動周期Tyの半周期のときに、走査線対S,SがあたかもY軸回りの走査方向(垂直走査方向)にそれぞれ略一定距離ΔYずつシフトするように、光走査部2の駆動を制御することができる。
【0025】
ここで、走査線対S,Sのシフト量(一定距離)ΔYは、第2揺動周期Tyの半周期毎の走査振幅Ayの変化量ΔAyと一致する。したがって、シフト量ΔYは、対象領域内で要求される水平走査方向の走査線数に応じて、走査振幅Ayの変化量ΔAyを調整することで、適宜設定することができる。なお、走査制御部4は、第2揺動周期Tyの半周期に走査が終了したか否かの判定を、例えば、位相検出部2から入力されるY軸回りの位相情報に基づいて行い、第2軸回りの走査振幅Ayを変化させるタイミングを決定する。
【0026】
走査制御部4は、図8に示すリサージュ走査軌跡の偏平度制御を、第2揺動周期Tyの半周期毎に行い、図6に示すように、Y軸回りの走査振幅Ayが最小振幅値|Ay|minと一致したときに対象領域全体についての走査(1フレーム)を完了させ、次の走査のY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から、実行させる。
【0027】
なお、図6においては、図の明瞭化のためΔAyの大きさを誇張して示したため、第2揺動周期Tyの半周期毎の振幅の段差が誇張されているが、実際はこの段差が微小になるように、ΔAyが設定されている。同様に、図6においては、図の明瞭化のため|Ay|minを大きく示したが、例えば、|Ay|min=0にして、対象領域の垂直走査方向の座標Y=0を走査するようにするとよい。このようにΔAy及び|Ay|minを設定することにより、図9に示すように、水平走査方向で互いに略平行な走査線対S,Sが垂直走査方向に密に存在する走査軌跡で、レーザ光を対象領域でリサージュ走査することができる。
【0028】
また、1フレームに要する時間(フレームレート)は、走査振幅Ayを変化させる一定量ΔAyが小さくなるほど長くなり、一定量ΔAyが大きくなるほど短くなる。このように、ΔAyの値を調整するだけで、フレームレートを容易にコントロールすることができる。
【0029】
そして、Y軸回りの最大振幅値|Ay|maxを図9で設定した値より大きくした場合、図10に示すように1フレーム完了後のリサージュ走査軌跡全体の領域を、水平走査方向の走査線の密度を変えないで、容易に広げることができる。
【0030】
上記光源制御部5は、レーザ光を投光するように光源部3に指令するものであり、位相検出部2で検出する揺動位相に基づいて、走査線対S,Sの走査時に対応する位相区間(図7(a)及び図7(b)の太線に対応するア,ウ,エ,カの区間)だけ、光源部3からレーザ光を投光させるように構成されている。ここで、図7(a)及び図7(b)のア〜カで示した各位相区間は、図8に、走査方向を示す矢印と共に示したア〜カの走査軌跡にそれぞれ対応している。光源制御部5は、例えば、位相検出部2で検出された揺動位相の検出値が、ア,ウ,エ,カの位相区間内であるか否かを判定し、位相区間内であると判定した場合、位相検出部2の揺動位相の検出値が、レーザ光の投光タイミングとして予め定めた、一定位相刻みΔθの揺動位相と一致したときに、レーザ光を投光するように光源部3に指令するように構成する。この一定位相刻みΔθは、例えば、対象領域にマトリクス状に予め定めた各画素の間隔に対応させて設定されている。これにより、第2揺動周期Tyの半周期毎に、対象領域の水平走査方向で互いに略平行な走査線対S,S上で上記予め定めた位相刻みΔθに応じた照射位置間隔でレーザ光を対象領域に照射することができる。
【0031】
次に、本実施形態に係る光走査装置10の動作について、図10のフローチャートを参照して説明する。
【0032】
先ず、ステップS1において、装置の起動スイッチの投入により、走査制御部4の駆動制御に基づき、光走査部1のX軸及びY軸回りの揺動を、最大振幅値|Ax|max及び最大振幅値|Ay|maxで開始する。
【0033】
ステップS2において、位相検出部2はX軸及びY軸回りの揺動の各揺動位相を検出し、その位相情報を光源制御部5に出力し、光源制御部5は各軸回りの位相情報を取得する。
【0034】
ステップS3において、光源制御部5は、位相検出部2からの揺動位相の検出値が、レーザ光の照射範囲の位相区間(ア,ウ,エ,カの位相区間)内であるか否かを判定する。ここで、照射範囲の位相区間内であると判定した場合は、ステップS4に進む。なお、照射範囲の位相区間内ではないと判定した場合(すなわち、イ及びオの区間である場合)は、ステップS6に進む。
【0035】
ステップS4において、光源制御部5は、位相検出部2からの揺動位相の検出値が、照射範囲の位相区間内で、予め定めた一定位相刻みの揺動位相と一致するか否かを判定する。ここで、検出値が予め定めた一定位相刻みの揺動位相と一致すると判定した場合は、光源制御部5は、レーザ光を投光するように光源部3に指令し、ステップS5に進む。
【0036】
ステップS5において、光源部3は、レーザ光を出力し、ステップS6に進む。なお、ステップS4において、光源制御部5は、検出値が予め定めた一定位相刻みの揺動位相と一致しないと判定した場合は、ステップS2に戻る。
【0037】
ステップS6において、走査制御部4は、第2揺動周期Tyの半周期の走査が終了したか否かの判定を、例えば、位相検出部2から入力されるY軸回りの位相情報に基づいて行う。ここで、第2揺動周期Tyの半周期の走査が終了したと判定した場合は、ステップS7に進む。なお、ステップS6において、第2揺動周期Tyの半周期の走査が終了していないと判定した場合は、ステップS8に進む。
【0038】
ステップS7において、走査制御部4は、例えば、Y軸走査デバイス8Bに入力する駆動信号の大きさ(例えば、電流値または電圧値)を一定量だけ小さくすることにより、図7(b)に示すように、Y軸回りの走査振幅Ayを予め設定された一定量ΔAyだけ小さくし、次の半周期(Ty/2)の走査を開始し、ステップS8に進む。
【0039】
ステップS8において、走査制御部4は、Y軸回りの走査振幅Ayが最小振幅値|Ay|minと一致するか否かを判定する。走査振幅Ayの最小は、例えば、Y軸走査デバイス8Bに入力している駆動信号の大きさ(電流値または電圧値)が、最小振幅値|Ay|minに対応する値(電流値または電圧値)と一致するか否かを判定することにより行う。ここで、走査振幅Ayが最小振幅値|Ay|minと一致しないと判定した場合、ステップS2に戻る。一方、一致すると判定した場合、1フレーム分の走査が完了する。
【0040】
なお、図示省略するが、引き続き走査を行う場合は、例えば、次のフレームのY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から実行させる。この場合、Y軸回りの走査振幅Ayが最大振幅値|Ay|maxと一致したところで1フレーム分の走査が完了し、さらに走査を行う場合は、前述したステップS1〜S8までの動作を行う。これらの動作を繰り返すことにより、1フレーム分の走査を所定回数行うことができる。
【0041】
このような構成により、本実施形態に係るレーザ計測装置1は、第2揺動周期Tyの半周期におけるリサージュ走査軌跡に、X軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、第1揺動周期Txと第2揺動周期Tyとを設定すると共に、第2揺動周期Tyの半周期毎に第2軸回りの走査振幅幅Ayを一定量ΔAyずつ変化させ、各軸回りの揺動位相に基づいて、走査線対S,Sの走査時に対応する位相区間だけ、光源部3からレーザ光を投光させる構成であるため、第2揺動周期Tyの半周期毎に、Y軸回りの走査方向についての、リサージュ走査軌跡の偏平度を変化させることができ、各走査線対S,Sの走査時に光ビームを投光させることができる。したがって、単に、上記位相区間内において一定位相刻みで光ビームを投光するだけで、リサージュ走査においても、ラスター走査と同様の点順次走査により光ビームを照射対象領域全体に渡って照射することができる。これにより、光ビームの投光タイミングのテーブルがなくても、容易に、光ビームを照射対象領域の各画素に照射することができる。
【0042】
また、本実施形態のように、第2揺動周期Tyを第1揺動周期Txの3倍に設定した場合、図9に示す1フレーム中において、実際にレーザ光を照射するための有効な走査時間は、図8に示すア,ウ,エ,カの走査に要する時間となる。したがって、1フレームに要する時間をTとした場合、有効な走査時間を2/3Tとすることができる。
【0043】
また、本実施形態のように、Y軸回りの走査振幅Ayを最大振幅値|Ay|maxから一定量ずつ最小振幅値|Ay|minまで減少させて1フレーム分の走査を完了させ、次の1フレームのY軸回りの揺動を、最小振幅値|Ay|minより一定量ΔAy増加(変化)させた振幅値から、実行させるように構成することにより、次のフレームへの移行時に、Y軸回りの走査振幅が大きく変わることがないため、例えば、走査振幅の急な変化に起因する装置内部からのノイズの発生を抑制することができ、また、Y軸デバイス8B等への衝撃も抑制することができる。なお、図示省略するが次の1フレームの実行は、最小振幅値|Ay|minから行ってもよい。この場合、次のフレームへの移行時における走査振幅の変化はないため、フレーム移行時における走査振幅の変化に起因するノイズ及びY軸デバイス8bへの衝撃を無くすことができると共に、各フレームにおける走査線対S,Sの数を完全に一致させることができる。
【0044】
また、本実施形態とは逆に、Y軸回りの走査振幅Ayを最小振幅値|Ay|minから一定量ずつ最大振幅値|Ay|maxまで増加させて1フレーム分の走査を完了させ、次の1フレームのY軸回りの揺動を、最大振幅値|Ay|maxより一定量減少させた振幅値から、又は、最大振幅値|Ay|maxから実行させるようにしても、ノイズ及び衝撃の抑制、又は、防止することができる。
【0045】
なお、本実施形態においては、走査制御部4は、上記のように、次のフレームへの移行時に、Y軸回りの走査振幅Ayが大きく変わることがないように構成した場合で説明したが、これに限らず、最大振幅値|Ay|max又は最小振幅値|Ay|minのいずれか一方の振幅値で、Y軸回りの揺動を開始させ、第2揺動周期Tyの半周期毎にY軸回りの走査振幅Ayを一定量ずつ変化させ、この走査振幅Ayが他方の振幅値と一致したときに対象領域全体についての走査を完了させ、次の走査のY軸回りの揺動を一方の振幅値から実行させる構成であってもよい。
【0046】
また、本実施形態においては、図9に示すように、走査線対S,Sが対象領域における水平走査方向に対して角度θ’だけ傾いた状態でリサージュ走査した場合で説明したが、これに限らず、図12に示すように、走査線対S,Sが対象領域における水平走査方向と略平行になる状態でリサージュ走査可能にしてもよい。
【0047】
この場合、具体的には、水平走査方向と走査線対S,Sとが略平行になるように、対象領域に対する光走査部1の設置角度を調整する調整部(図示省略)を光走査部2等に備えて構成する。調整部は、図示省略するが、例えば、光走査部1によるリサージュ走査軌跡全体が角度θ’だけ回転するように、各デバイス8A,8B全体を回転可能に構成する。このように、走査線対S,Sを対象領域における水平走査方向と略平行になるように調整することにより、1フレーム走査後の走査軌跡全体を略矩形状にすることができる。これにより、図12に示すように、矩形状の対象領域と走査軌跡全体の領域を略一致させることができ、より効率的に矩形状の対象領域を走査することができる。
【0048】
また、本実施形態においては、光走査部2は、図3等に示すように、S字状の走査軌跡を描く場合で説明したが、これに限らず、例えば、図13に示すS字状の走査軌跡を2つ組み合わせた走査軌跡や、図14に示すS字状の走査軌跡を3つ組み合わせた走査軌跡等の、S字状の走査軌跡をN個組み合わせた走査軌跡を描くようにしてもよい。これらの場合、走査制御部4は、第2揺動周期Tyを第1揺動周期Txの奇数倍に設定するように構成する。例えば、図13の場合は、第2揺動周期Tyを第1揺動周期Txの5倍に設定し、図14の場合は、第2揺動周期Tyを第1揺動周期Txの7倍に設定する。このように、S字状の走査軌跡をN個組み合わせた走査軌跡を描くには、Ty=(2N+1)・Txとなるように第2揺動周期Tyと第1揺動周期Txを設定すればよい。なお、走査線対S,Sは、例えば、図13の場合、S1,S1及びS2,S2の2対あり、図14の場合、S3,S3、S4,S4及びS5,S5の3対あり、それぞれの場合において、レーザ光照射用の走査線としていずれの走査線対を用いてもよい。
【0049】
そして、本実施形態においては、光走査部1は、X軸走査デバイス8AとY軸走査デバイス8Bとを組み合わせて構成した場合について説明したが、これに限られず、図15に示すように、光走査部1は、内側トーションバー21によって揺動可能に支持され、表面中央部に反射ミラー7を形成した内側可動部22と、該内側可動部22を取り囲んで枠状に形成され、内側トーションバー21を支持すると共に該内側トーションバー21の軸線に対して直交方向に延びる外側トーションバー23によって揺動可能に支持された外側可動部24と、を備えて構成したものであってもよい。
【0050】
また、本実施形態においては、第1軸(X軸)回りの走査方向が対象領域の水平走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の垂直走査方向に対応する場合で説明したが、これに限らず、第1軸(X軸)回りの走査方向が対象領域の垂直走査方向に対応し、第2軸(Y軸)回りの走査方向が対象領域の水平走査方向に対応するように、各走査デバイス8A,8Bを配置する構成であってもよい。この場合、走査軌跡は、図3に示すS字を90°回転させた軌跡となり、その走査軌跡に含まれる走査線対S,Sは水平走査方向に一定量ずつシフトされることになる。
【0051】
また、本実施形態においては、光ビームがレーザ光の場合について述べたが、これに限られず、光ビームは発光素子(LED)によるものであってもよい。
【0052】
そして、本実施形態において、光走査装置10を光測距装置の光走査手段として用いた場合で説明したが、光走査装置10は、これに限らず、レーザ走査型のプロジェクタにおける光走査手段としても用いることができる。この場合、光源部3は、外部から入力される映像信号に応じて強度変調された映像光を、例えば、走査方向が同一の図8に示すア及びウの走査線対S,S、又は、エ及びカの走査線対S,Sに対応する位相区間(図7参照)だけ、照射するように構成することにより、例えば、ブラウン管(CRT)と同様の点順次走査により映像を表示することができる。なお、ラスタースキャン用の映像信号は、例えば、ブラウン管の垂直方向に一定間隔で位置する水平方向の各ラスター走査線の並び順で入力されるため、1フレーム分の映像信号を一旦メモリ等に記憶させ、各走査線対S,Sの走査順に合わせて各ラスター走査線の映像信号の並びを入れ替えるように構成する。なお、光走査装置10をプロジェクタの光走査手段として用いる場合は、光ビームとしてRGBの三色光を使用すればカラー表示も可能である。
【符号の説明】
【0053】
1・・・・・・・光走査部
2・・・・・・・位相検出部
3・・・・・・・光源部
4・・・・・・・走査制御部
5・・・・・・・光源制御部
6A,6B・・・トーションバー
7A,7B,7・反射ミラー
8A,8B・・・走査デバイス
10・・・・・・光走査装置
21・・・・・・内側トーションバー
22・・・・・・内側可動部
23・・・・・・外側トーションバー
24・・・・・・外側可動部
【特許請求の範囲】
【請求項1】
反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、該反射ミラーに入射される光ビームの照射対象領域内で該光ビームをリサージュ走査可能に形成された光走査部と、
前記反射ミラーの各軸回りの揺動位相をそれぞれ検出する位相検出部と、
前記反射ミラーに向かって光ビームを投光する光源部と、
前記第2軸回りの揺動周期である第2揺動周期の半周期における前記光ビームのリサージュ走査軌跡に、前記第1軸回りの走査方向で互いに略平行な走査線対が存在するように、前記第1軸回りの揺動周期である第1揺動周期と前記第2揺動周期とを設定し、前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を一定量ずつ変化させて、前記光走査部を駆動させる走査制御部と、
前記位相検出部で検出する前記揺動位相に基づいて、前記走査線対の走査時に対応する位相区間だけ、前記光源部から前記光ビームを投光させる前記光源制御部と、
を備えたことを特徴とする光走査装置。
【請求項2】
前記走査制御部は、前記第2揺動周期を前記第1揺動周期の奇数倍に設定し、走査開始基準点における各軸回りの前記揺動位相を一致させ、前記第1軸回りについては一定の走査振幅で揺動させ、前記第2軸回りについては前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を所定の最大振幅値と所定の最小振幅値との間で前記一定量ずつ変化させて揺動させることを特徴とする請求項1に記載の光走査装置。
【請求項3】
前記走査制御部は、前記最大振幅値又は前記最小振幅値のいずれか一方の振幅値で、前記第2軸回りの揺動を開始させ、前記第2揺動周期の半周期毎に前記第2軸回りの走査振幅を前記一定量ずつ変化させ、該第2軸回りの走査振幅が他方の振幅値と一致したときに前記照射対象領域全体についての走査を完了させ、次の走査の前記第2軸回りの揺動を、前記他方の振幅値から、又は、前記他方の振幅値より前記一定量変化させた振幅値から、実行させることを特徴とする請求項2に記載の光走査装置。
【請求項4】
前記走査制御部は、前記最大振幅値又は前記最小振幅値のいずれか一方の振幅値で、前記第2軸回りの揺動を開始させ、前記第2揺動周期の半周期毎に前記第2軸回りの走査振幅を前記一定量ずつ変化させ、該第2軸回りの走査振幅が他方の振幅値と一致したときに前記照射対象領域全体についての走査を完了させ、次の走査の前記第2軸回りの揺動を前記一方の振幅値から実行させることを特徴とする請求項2に記載の光走査装置。
【請求項5】
前記第2揺動周期は、前記第1揺動周期の3倍であることを特徴とする請求項1〜4のいずれか1つに記載の光走査装置。
【請求項6】
前記照射対象領域の水平走査方向又は垂直走査方向と前記走査線対とが略平行になるように、前記照射対象領域に対する前記光走査部の設置角度を調整する調整部を備えたことを特徴とする請求項1〜5のいずれか1つに記載の光走査装置。
【請求項1】
反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、該反射ミラーに入射される光ビームの照射対象領域内で該光ビームをリサージュ走査可能に形成された光走査部と、
前記反射ミラーの各軸回りの揺動位相をそれぞれ検出する位相検出部と、
前記反射ミラーに向かって光ビームを投光する光源部と、
前記第2軸回りの揺動周期である第2揺動周期の半周期における前記光ビームのリサージュ走査軌跡に、前記第1軸回りの走査方向で互いに略平行な走査線対が存在するように、前記第1軸回りの揺動周期である第1揺動周期と前記第2揺動周期とを設定し、前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を一定量ずつ変化させて、前記光走査部を駆動させる走査制御部と、
前記位相検出部で検出する前記揺動位相に基づいて、前記走査線対の走査時に対応する位相区間だけ、前記光源部から前記光ビームを投光させる前記光源制御部と、
を備えたことを特徴とする光走査装置。
【請求項2】
前記走査制御部は、前記第2揺動周期を前記第1揺動周期の奇数倍に設定し、走査開始基準点における各軸回りの前記揺動位相を一致させ、前記第1軸回りについては一定の走査振幅で揺動させ、前記第2軸回りについては前記第2揺動周期の半周期毎に、前記第2軸回りの走査振幅を所定の最大振幅値と所定の最小振幅値との間で前記一定量ずつ変化させて揺動させることを特徴とする請求項1に記載の光走査装置。
【請求項3】
前記走査制御部は、前記最大振幅値又は前記最小振幅値のいずれか一方の振幅値で、前記第2軸回りの揺動を開始させ、前記第2揺動周期の半周期毎に前記第2軸回りの走査振幅を前記一定量ずつ変化させ、該第2軸回りの走査振幅が他方の振幅値と一致したときに前記照射対象領域全体についての走査を完了させ、次の走査の前記第2軸回りの揺動を、前記他方の振幅値から、又は、前記他方の振幅値より前記一定量変化させた振幅値から、実行させることを特徴とする請求項2に記載の光走査装置。
【請求項4】
前記走査制御部は、前記最大振幅値又は前記最小振幅値のいずれか一方の振幅値で、前記第2軸回りの揺動を開始させ、前記第2揺動周期の半周期毎に前記第2軸回りの走査振幅を前記一定量ずつ変化させ、該第2軸回りの走査振幅が他方の振幅値と一致したときに前記照射対象領域全体についての走査を完了させ、次の走査の前記第2軸回りの揺動を前記一方の振幅値から実行させることを特徴とする請求項2に記載の光走査装置。
【請求項5】
前記第2揺動周期は、前記第1揺動周期の3倍であることを特徴とする請求項1〜4のいずれか1つに記載の光走査装置。
【請求項6】
前記照射対象領域の水平走査方向又は垂直走査方向と前記走査線対とが略平行になるように、前記照射対象領域に対する前記光走査部の設置角度を調整する調整部を備えたことを特徴とする請求項1〜5のいずれか1つに記載の光走査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図11】
【図13】
【図14】
【図15】
【図9】
【図10】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図11】
【図13】
【図14】
【図15】
【図9】
【図10】
【図12】
【公開番号】特開2013−37324(P2013−37324A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−175741(P2011−175741)
【出願日】平成23年8月11日(2011.8.11)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月11日(2011.8.11)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]