
光音響撮像装置および光音響撮像方法

【課題】三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくする。
【解決手段】光音響撮像において、第2の空間情報によって規定される被検部位の軸の向きy、走査方向xおよび鉛直方向zのうち少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定し、上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部15に表示されるように、当該光音響画像データを変換する。
【解決手段】光音響撮像において、第2の空間情報によって規定される被検部位の軸の向きy、走査方向xおよび鉛直方向zのうち少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定し、上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部15に表示されるように、当該光音響画像データを変換する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光が被検体に照射されることにより被検体内で発生した光音響波を検出して光音響画像を生成する光音響撮像装置および光音響撮像方法に関するものである。
【背景技術】
【0002】
従来、被検体の内部の断層画像を取得する方法としては、超音波が被検体内に照射されることにより被検体内で反射した超音波を検出して超音波画像を生成し、被検体内の形態的な断層画像を得る超音波イメージングが知られている。一方、被検体の検査においては形態的な断層画像だけでなく機能的な断層画像を表示する装置の開発も近年進められている。そして、このような装置の一つに光音響分析法を利用した装置がある。この光音響分析法は、所定の波長を有する光(例えば、可視光、近赤外光又は中間赤外光)を被検体に照射し、被検体内の特定物質がこの光のエネルギーを吸収した結果生じる弾性波である光音響波を検出して、その特定物質の濃度を定量的に計測するものである。被検体内の特定物質とは、例えば血液中に含まれるグルコースやヘモグロビンなどである。このように光音響波を検出しその検出信号に基づいて光音響画像を生成する技術は、光音響イメージング(PAI:Photoacoustic Imaging)或いは光音響トモグラフィー(PAT:Photo Acoustic Tomography)と呼ばれる。
【0003】
例えば特許文献1には、バンドルファイバを用いた光学系と超音波検出用の検出素子とが一体的に組み合わされた超音波探触子を使用して、三次元の光音響画像を生成可能な光音響撮像装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−12295号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、光音響画像を三次元で表示する場合には、従来、超音波探触子の走査開始位置における最初の1ラインの断層画像データを基準にして、取得された順に画像データが表示される。
【0006】
しかしながら、このような場合、表示された光音響画像の視点が、ユーザと被検体との位置関係、或いは超音波探触子の走査方向と無関係に決定されるため、ユーザにとって光音響画像の内容を把握するのに煩わしいという問題が生じうる。そこで、光音響画像をどの方向から見るかによって見え方が異なるため、ユーザが画像内容を容易に把握できるように、当該画像が最初に表示される段階で一定の方向に揃えるか、またはその画像を見る方向を指定できることが好ましい。
【0007】
本発明は上記問題に鑑みてなされたものであり、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることを可能とする光音響撮像装置および光音響撮像方法を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る光音響撮像装置は、
被検部位に測定光を照射する光照射部、および、測定光の照射により被検部位内で発生した光音響波を検出する超音波振動子が一次元に配列したアレイ振動子を有する超音波探触子と、
超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得する情報取得部と、
超音波探触子の走査によって検出された光音響波、および走査中に取得された第1の空間情報に基づいて、光音響画像データを生成する画像データ生成部と、
上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付ける関連付け部と、
第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定する視点設定部と、
上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するデータ変換部と、
変換された光音響画像データに基づく光音響画像を表示する表示部とを備えることを特徴とするものである。
【0009】
そして、本発明に係る光音響撮像装置において、視点設定部は、上記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえるものであることが好ましい。
【0010】
また、本発明に係る光音響撮像装置において、視点設定部は、複数生成された光音響画像データについて、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択するものであることが好ましい。
【0011】
また、本発明に係る光音響撮像装置において、情報取得部は、1フレーム分の撮像ごとに第1の空間情報を取得するものであることが好ましい。
【0012】
或いは、本発明に係る光音響撮像装置は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。
【0013】
また、本発明に係る光音響撮像装置において、情報取得部は、磁気センサユニットを含み、この磁気センサユニットを用いて第1の空間情報および第2の空間情報を取得するものであることが好ましい。
【0014】
本発明に係る光音響撮像方法は、
光音響撮像用の超音波探触子を備える光音響撮像装置を用いて、
超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
超音波探触子の走査によって検出された光音響波、および走査中に取得された第1の空間情報に基づいて、光音響画像データを生成し、
上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、
第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定し、
上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換し、
変換された光音響画像データに基づく光音響画像を表示することを特徴とするものである。
【0015】
そして、本発明に係る光音響撮像方法において、上記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえることが好ましい。
【0016】
また、本発明に係る光音響撮像方法において、複数生成された光音響画像データについて、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択することが好ましい。
【0017】
また、本発明に係る光音響撮像方法において、1フレーム分の撮像ごとに第1の空間情報を取得することが好ましい。
【0018】
或いは、本発明に係る光音響撮像方法は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。
【0019】
また、本発明に係る光音響撮像方法において、磁気センサユニットを用いて第1の空間情報および第2の空間情報を取得することが好ましい。
【発明の効果】
【0020】
本発明に係る光音響撮像装置および方法は、第2の空間情報によって規定される少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定し、上記視点とすべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するから、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。この結果、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施形態における光音響撮像装置の構成を示す概略図である。
【図2】実施形態における信号処理部の構成を示す概略図である。
【図3】実施形態における超音波探触子の構成を示す概略図である。
【図4】1フレーム分の画像データが順次空間座標上に並べられる様子を示す概略図である。
【図5】撮像部位ごとの軸の例を示す概略図である。
【図6A】モデル化された三次元の光音響画像を示す概略図である。(a)は斜視図、(b)は平面図、(c)は正面図、(d)は右側面図である。
【図6B】モデル化された三次元の光音響画像を示す概略図である。(e)は左側面図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を用いて説明するが、本発明はこれに限られるものではない。なお、視認しやすくするため、図面中の各構成要素の縮尺等は実際のものとは適宜異ならせてある。
【0023】
図1は実施形態における光音響撮像装置の構成を示す概略図であり、図2は実施形態における信号処理部の構成を示す概略図であり、図3は実施形態における超音波探触子の構成を示す概略図である。
【0024】
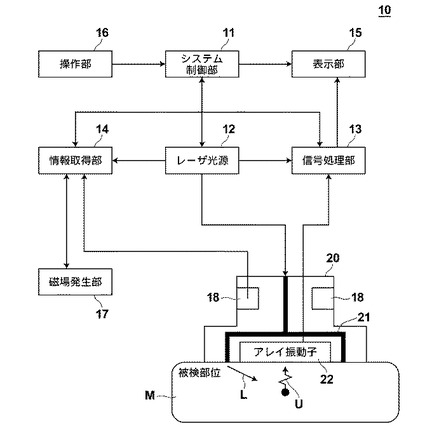
本実施形態の光音響撮像装置10は、図1に示されるように、超音波探触子20、システム制御部11、レーザ光源12、信号受信部13、情報取得部14、表示部15および操作部16(ユーザインタフェース)を備えるものである。
【0025】
本実施形態において、信号受信部13は、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37、ボリュームデータ構築部38、関連付け部39、視点設定部40およびデータ変換部41から構成される。
【0026】
また、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37およびボリュームデータ構築部38が全体として本発明における画像データ生成部42に相当する。
【0027】
そして、本実施形態の光音響撮像方法は、光音響撮像装置10を使用して、
情報取得部14によって、超音波探触子20の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位Mの実空間における軸の向き、超音波探触子20の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
画像データ生成部42によって、超音波探触子20の走査によって検出された光音響波U、および走査中に取得された第1の空間情報に基づいて、三次元の光音響画像データを生成し、
関連付け部39によって、上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、
視点設定部40によって、第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択し、かつこの1つの方向について順方向か逆方向かの選択をして、2つの選択結果に基づいて視点とするべき方向を設定し、
データ変換部41によって、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換し、
表示部15によって、変換された光音響画像データに基づく光音響画像を表示するものである。
【0028】
超音波探触子20は、光照射部21およびアレイ振動子22から構成され、被検部位からの光音響波を検出するものである。なお、本実施形態では、情報取得部14の一部を構成する磁気センサが超音波探触子20に内蔵されている。
【0029】
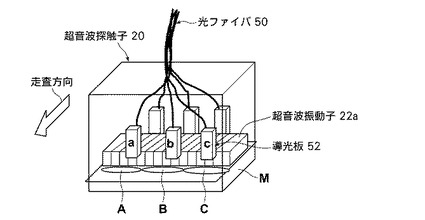
光照射部21は、アレイ振動子22の近傍からレーザ光Lを被検部位に向けて照射する光学要素である。例えば図3に示されるように、光照射部21は、レーザ光源12から出力されたレーザ光Lをアレイ振動子22の近傍に導光する光ファイバ50の先端部に接続された導光板52である。また、光ファイバ50の先端部から出射したレーザ光Lをそのまま被検部位に照射する場合には、光照射部21は光ファイバ50の当該先端部となる。光照射部21は、例えばアレイ振動子22の周囲に沿って配列される。
【0030】
アレイ振動子22は、被検部位内で発生した光音響波Uを検出する検出素子である。アレイ振動子22は、図3に示されるように、1次元状に配列された複数の超音波振動子22aから構成される。超音波振動子22aは、例えば、圧電セラミクス、またはポリフッ化ビニリデン(PVDF)のような高分子フィルムから構成される圧電素子である。超音波振動子22aは、光音響波Uを検出した場合にその音響信号を電気信号に変換する機能を有している。この電気信号は後述する受信回路30に出力される。超音波探触子22aは、セクタ走査タイプ、リニア走査タイプ、コンベックス走査タイプ等の中から診断対象となる被検部位に応じて適宜選択される。
【0031】
レーザ光の照射は、例えば光照射部21全体(図3においてすべての導光板52)によって同時に行われる。この場合、レーザ光の照射は、1ライン分の撮像(光音響画像の生成)ごとに行われる。このような検出方法によって音響信号に基づくデータは後述する遅延加算部33において遅延加算処理がなされる。
【0032】
或いは、レーザ光の照射は例えば被検部位の部分領域ごとに行うこともできる。このような場合、例えば導光板52は、領域A、領域Bおよび領域Cのそれぞれに対応して複数設けられる(図3)。その場合、領域Aに対応する導光板52aは領域Aの選択時にレーザ光を領域Aに照射する。そして、領域Bに対応する導光板52bは領域Bの選択時にレーザ光を領域Bに照射する。さらに、領域Cに対応する導光板52cは領域Cの選択時にレーザ光を領域Cに照射する。例えばアレイ振動子22が192ch分の超音波振動子22aから構成される場合を考える。アレイ振動子22の配列方向の幅は、光音響画像の生成に関連して例えば3つの部分領域(領域A〜C)に分割されており、各部分領域の幅は64ch分の超音波振動子22aの幅に相当する幅であるとする。光音響撮像装置10は、部分領域への光照射および信号検出をそれぞれの部分領域に対して1回ずつ(計3回)繰り返し行い、全192ch分のデータを取得することにより、1フレーム分の撮像を実施する。このような検出方法によって音響信号に基づくデータは、後述する生データメモリ34に一旦保存された後、位相整合加算部35において位相整合加算処理がなされる。
【0033】
超音波探触子20は、光音響波を効率よく検出するために音響整合層をアレイ振動子22の表面に備えてもよい。一般に圧電素子材料と生体では音響インピーダンスが大きく異なるため、圧電素子材料と生体が直接接した場合には、界面での反射が大きくなり光音響波を効率よく検出することができない。このため、圧電素子材料と生体の間に中間的な音響インピーダンスを有する音響整合層が配置されることにより、光音響波を効率よく検出することができる。音響整合層を構成する材料の例としては、エポキシ樹脂やシリコーンゴムなどが挙げられる。
【0034】
システム制御部11は、レーザ光源12、信号受信部13、情報取得部14、表示部15および操作部16を制御するものである。システム制御部11は、例えばこれらが同期をとるためのトリガ信号を出力する。
【0035】
レーザ光源12は、被検部位に照射すべきレーザ光Lを測定光として出力するものである。レーザ光源12は、例えば、血液の吸収ピークに含まれる波長のレーザ光を発生させる1以上の光源を有する。光源として、特定の波長成分又はその成分を含む単色光を発生する半導体レーザ(LD)、固体レーザ、ガスレーザ等の発光素子を用いることができる。例えば本実施形態においてレーザ光源12は、励起光源であるフラッシュランプとレーザ発振を制御するQスイッチレーザとを含むものとする。レーザ光源12は、システム制御部11がフラッシュランプトリガ信号を出力すると、フラッシュランプを点灯し、Qスイッチレーザを励起する。
【0036】
本発明では、レーザ光の波長は、撮像対象となる被検体内の物質の光吸収特性に合わせて適宜決定される。生体内のヘモグロビンは、その状態(酸素化ヘモグロビン、脱酸素化ヘモグロビン、メトヘモグロビン、炭酸ガスヘモグロビン、等)により光学的な吸収係数が異なる。例えば撮像対象が生体内のヘモグロビンである場合(つまり、生体内部の血管を撮像する場合)には、生体の光透過性が良く、かつ各種ヘモグロビンが光の吸収ピークを持つ600〜1000nm程度とすることが好ましい。
【0037】
レーザ光源12は、レーザ光として1〜100nsecのパルス幅を有するパルス光を出力するものであることが好ましい。そして、上記レーザ光の出力は、レーザ光と光音響波の伝搬ロス、光音響変換の効率および現状の検出器の検出感度等の観点から、10μJ/cm2〜数10mJ/cm2であることが好ましい。さらに、パルス光出力の繰り返しは、画像構築速度の観点から、10Hz以上であることが好ましい。また、レーザ光は上記パルス光が複数並んだパルス列とすることもできる。レーザ光源12から出力されたレーザ光は、例えば光ファイバ、導光板、レンズおよびミラー等の導光手段を用いて超音波探触子20のアレイ振動子22の近傍まで導光され、アレイ振動子22の近傍から被検部位に照射される。
【0038】
信号受信部13は、検出した音響信号から光音響画像を生成するものである。この光音響画像の生成は、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37、ボリュームデータ構築部38、関連付け部39、視点設定部40およびデータ変換部41によって実現される。
【0039】
受信回路30は、超音波探触子20から出力された光音響波の電気信号を受信するものである。受信された電気信号はAD変換部31に出力される。
【0040】
AD変換部31は電気信号をデジタル信号に変換するサンプリング手段である。例えばAD変換部31は、受信回路30が受信した電気信号を、例えばシステム制御部11が出力するクロック周波数40MHzのADクロック信号に同期してデジタル信号に変換する。
【0041】
処理選択部32は、AD変換部31においてサンプリングしたデジタル信号(サンプリングデータ)を再構成するための処理を選択するものである。処理選択部32は、サンプリングデータを再構成する処理として、遅延加算処理または位相整合加算処理を選択し、遅延加算処理を選択した場合にはサンプリングデータを遅延加算部33へ送信し、位相整合加算処理を選択した場合にはサンプリングデータを生データメモリ34へ送信する。
【0042】
遅延加算部33は、例えば超音波振動子22aのそれぞれが検出した信号から得られたそれぞれのサンプリングデータを、超音波振動子22aの位置に応じた遅延時間で加算し、再構成された1ライン分の信号データを生成する(遅延加算法)。遅延加算処理が行われる場合には、レーザ光の照射は超音波探触子20の位置を固定した状態で複数回行われるため、照射ごとに超音波振動子22aのチャンネルをずらしながら1ライン分の信号データが生成される。なお、この遅延加算部33は、遅延加算法に代えて、CBP法(Circular Back Projection)により再構成を行うものでもよい。あるいは遅延加算部33は、ハフ変換法又はフーリエ変換法を用いて再構成を行うものでもよい。
【0043】
さらに、1ライン分の信号データには、後述する情報取得部14によって取得された超音波探触子20の実空間における位置およびその向きを規定する空間情報であってその1ライン分の信号データの基となった音響信号が検出された時の空間情報(第1の空間情報)が関連付けられる。これにより、その1ライン分の信号データが実空間におけるどのライン部分に位置するものなのかを決定することができる。遅延加算部33は、上記のようにして再構成された信号データを検波・対数変換部36に出力する。
【0044】
生データメモリ34は、例えば超音波振動子22aのそれぞれが検出した信号から得られたそれぞれの生のサンプリングデータをすべて一旦記憶するものである。
【0045】
位相整合加算部35は、生データメモリ34に記憶された生のサンプリングデータに基づいて、それぞれのサンプリングデータを位相整合加算することにより、超音波振動子22aのチャンネルごとに1ライン分の信号データを生成するものである。位相整合加算部35は、例えばDSP(Digital Signal Processor)またはFPGA(Field Programmable Gate Array)を含むことが好ましい。位相整合加算部35は、上記のようにして再構成された信号データを検波・対数変換部36に出力する。
【0046】
検波・対数変換部36は、遅延加算部33または位相整合加算部35から出力された1ライン分の信号データの包絡線を生成し、次いでその包絡線を対数変換してダイナミックレンジを広げる。そして、検波・対数変換部36は、上記のようにして信号処理した1ライン分の信号データをフレーム構築部37に出力する。
【0047】
フレーム構築部37は、複数の1ライン分の信号データを組み合わせて、1フレーム(1断面)分の画像データを生成するものである。フレーム構築部37は、例えば1ライン分のデータの時間軸の位置を、断層画像における深さを表す変位軸の位置に変換して1フレーム分の画像データを構築する。構築された1フレーム分の画像データはボリュームデータ構築部38へ出力される。
【0048】
ボリュームデータ構築部38は、超音波探触子20の走査位置ごとに生成された1フレーム分の画像データに基づいて、1フレーム分の画像データを重畳させて空間座標に並べたり、取得したデータの間を補間しながら三次元の光音響画像用のボリュームデータを構築したりするものである。上記のようにしてボリュームデータ構築部38によって作成された三次元的な視覚効果を有する画像データを光音響画像データと称する。
【0049】
関連付け部39は、後述する情報取得部14によって取得された第2の空間情報(被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する空間情報)を光音響画像データに関連付けるものである。第2の空間情報の関連付けは、上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で行う。「光音響画像データに係る撮像部位」とは、光音響画像データに基づく光音響画像に実際に表される被検部位の部分を意味する。
【0050】
視点設定部40は、第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定するものである。なお、視点設定部40は、上記選択された1つの方向について、ユーザからの指示を受けて順方向か逆方向かの選択をするように構成してもよい。つまりこの場合には、この選択された1つの方向とその方向に対して順方向か逆方向かの選択結果に基づいて、その光音響画像データに基づく光音響画像を表示する際の視点の方向が決められる。
【0051】
このように視点とするべき方向が設定されると、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。視点設定部40において、方向の選択は、初期値として設定された方向またはユーザが操作部16を使用して入力した情報に従って行われる(図2)。これにより、ユーザは、必要に応じて、光音響画像が表示される際の視点を変更することが可能である。なお、光音響画像データを構築した仮想空間の中で、光音響画像データと視点との距離は、光音響画像の縮尺に応じて適宜調整される。つまり、光音響画像データと視点との距離は、画像の表示手段の画面上での縮尺に影響するものであるから、光音響画像が画面の中で適切な大きさで表示されるようにする。
【0052】
また、光音響画像を画面に表示する際に、画像のどの方向を画面上での「上方向」に設定するかについては、例えば被検部位と超音波探触子20とが接触している面を画面上での「上方向」とするよう基本設定しておく。このように基本設定しておくことで、ユーザは常に被検部位の表面が画面の中で上として表示された光音響画像を見ることができる。なお、画面上での「上方向」をどのように設定するかは、予め操作部16によって変更することも可能である。
【0053】
視点設定部40は、三次元の光音響画像データが複数生成された場合には、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択するものであることが好ましい。「要素」とは、第2の空間情報を構成する要素、並びに、順方向か逆方向かの要素を意味する。つまり、視点設定部40は、複数の光音響画像データのそれぞれについての上記視点とするべき方向が同一となるように、上記1つの方向を選択し、順方向か逆方向かの選択を行うことになる。なお、「同一」とは、実空間において物理的に同一であるという意味ではなく、例えば「超音波探触子の実空間における走査方向」のような選択された項目が同一であるという意味である。
【0054】
データ変換部41は、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するものである。変換方法としては、例えば座標変換等の公知の方法により行うことができる。変換された光音響画像データは表示部15へ出力される。
【0055】
また、データ変換部41は、光音響画像データとして、三次元のボリュームデータを一括して出力してもよいし、1フレーム分の画像データを順次出力するようにしてもよい。前者の場合には、超音波探触子20の1回の走査が終了した時点で所定の視点となるように画像が表示される。一方、後者の場合には、図4に示されるように、超音波探触子20の走査の進捗に合わせて1フレーム分の画像データが順次表示されるようになる。例えば、視点とするべき方向として超音波探触子20の走査方向の順方向が設定されている場合には、表示手段15の画面上では、1フレーム分の画像データが、仮想空間の中で奥から手前に向かって重畳されながら表示される。一方、視点とするべき方向として超音波探触子20の走査方向の逆方向が設定されている場合には、表示手段15の画面上では、1フレーム分の画像データが、仮想空間の中で手前から奥に向かって重畳されながら表示される。例えば、図4は、手前に行くに従って細くなる血管Vを撮像した場合において、後方にある画像が透けるように画像の中心がずらされながら、1フレーム分の画像データ55が空間座標上で手前に順次並べられる様子を示す。
【0056】
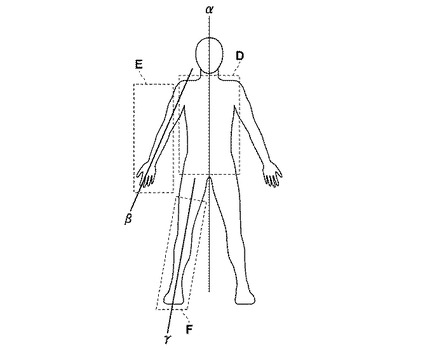
情報取得部14は、超音波探触子20の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位Mの実空間における軸の向き、超音波探触子20の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得するものである。「被検部位Mの実空間における軸の向き」とは、被検部位を包含する頭部、胴体または四肢の中心軸を意味する。例えば、図5に示されるように、胴体Dの中心軸とは胴体の長さ方向に沿って中心を通る軸αであり、上肢Eの中心軸とは上肢の長さ方向に沿って中心を通る軸βであり、下肢Fの中心軸とは下肢の長さ方向に沿って中心を通る軸γである。なお、軸の正負の取り方は任意である。また、上肢および下肢が関節で屈曲している場合には、関節で分離した上腕、前腕、大腿および下腿のそれぞれで同様に中心軸を求めることもできる。「超音波探触子20の実空間における走査方向」とは、図3に示されるように、超音波探触子20を走査する方向を意味し、通常は、超音波振動子22aの配列方向に垂直で、かつ被検部位の表面に沿った方向となる。
【0057】
情報取得部14は、磁場発生部17および複数の磁気センサ18を有する磁気センサユニットを含み、この磁気センサユニットを使用して空間情報を取得する。磁気センサユニットは、磁場発生部17が形成するパルス磁場上の空間において、磁場発生部17に対する磁気センサ18の相対的位置座標(x、y、z)、および磁気センサ18の姿勢情報(角度(α、β、γ)の情報)を取得することができる。
【0058】
したがって、超音波探触子20の実空間における位置は、例えば2つの磁気センサ18が取得した自身が存在する位置に基づいて、その中間位置として求めることができる。また、超音波探触子20の実空間における向きは、2つの磁気センサ18のうち一方磁気センサ(例えば超音波探触子20の裏側のセンサ)から他方の磁気センサ(例えば超音波探触子20の表側のセンサ)へ向かうベクトルを算出することにより求めることができる。また、被検部位Mの実空間における軸の向きは、磁気センサユニットを用いて被検部位を包含する頭部、胴体または四肢の中心軸を規定する2点を決定することにより求めることができる。具体的には、例えば上肢の場合には、肩の位置に超音波探触子20を配置してその位置を情報取得部14に記憶させ、その後手先の位置に超音波探触子20を配置してその位置を情報取得部14に記憶させれば、上肢の中心軸βを規定する2点が得られる。また、超音波探触子20の実空間における走査方向は、超音波探触子20の実空間における位置の時間的な変化に基づいて求めることができる。また、実空間の鉛直方向は、例えば磁場発生部17によって規定される座標系のz軸とすることができる。
【0059】
磁気センサ18は、超音波探触子20の実空間における位置およびその向きを正確に取得するために、超音波振動子22aの配列方向を規定するために2つ、超音波振動子22aの配列方向に垂直で、かつ被検部位の表面と交わる方向を規定するために2つの少なくとも4つ必要である。
【0060】
例えば、第1の空間情報は1フレーム分の撮像ごとに取得される。具体的には、情報取得のタイミングをレーザ光源12の出力に同期させることにより、撮像ごとの情報取得が可能である。
【0061】
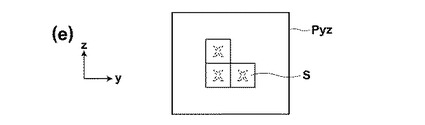
表示部15は、データ変換部41によって変換された光音響画像データに基づく光音響画像を表示するものである。図6Aおよび5Bは、モデル化された三次元の光音響画像を示す概略図である。そして、図6Aaは当該光音響画像の斜視図、図6Abは当該光音響画像の平面図、図6Acは当該光音響画像の正面図、図6Adは当該光音響画像の右側面図、図6Beは当該光音響画像の右側面図である。図6Aおよび5Bでは、撮像部位として例えば3つの立方体が表現されている。また、当該光音響画像データには、直交系のx軸、y軸およびz軸が関連付けられており、例えばx軸は超音波探触子の実空間における走査方向、y軸は被検部位の実空間における軸の向き、z軸は実空間の鉛直方向であるとする。なお、上記の例では、光音響画像データに3つの方向が関連付けられているが、関連付けられる方向は1つでもよい。また、上記の例では、3つの方向が直交系を成すように設定されているが、これらの方向は必ずしも直交系である必要はない。
【0062】
例えば、視点設定部40が3つの方向の中から「実空間の鉛直方向」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてz軸正方向を設定した場合には、図6Abに示されるように、立方体の面のうち「Z」と記載された面が見えるように、x−y平面Pxyに投影された当該光音響画像が表示される。また、視点設定部40が3つの方向の中から「被検部位の実空間における軸の向き」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてy軸正方向を設定した場合には、図6Acに示されるように、立方体の面のうち「Y」と記載された面が見えるように、z−x平面Pzxに投影された当該光音響画像が表示される。また、視点設定部40が3つの方向の中から「超音波探触子の実空間における走査方向」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてx軸正方向を設定した場合には、図6Adに示されるように、立方体の面のうち「X」と記載された面が見えるように、y−z平面Pyzに投影された当該光音響画像が表示される。
【0063】
さらに、視点設定部40が3つの方向の中から「超音波探触子の実空間における走査方向」を選択し、かつ順方向か逆方向かの選択において「逆方向」を選択した結果、視点とするべき方向としてx軸負方向を設定した場合には、図6Beに示されるように、立方体の面のうち「X」と記載された面が裏側から見えるように、y−z平面Pyzに投影された当該光音響画像が表示される。
【0064】
このように、三次元の光音響画像が常に実空間と関連付けられた特定の方向から見た画像として表示されるため、ユーザは光音響画像の内容を容易に把握しやすくなる。
【0065】
なお、上記の表示方法は、光音響画像が表示部に表示された初期段階における表示方法であるため、一旦光音響画像が表示された後、ユーザが必要に応じて当該画像を回転させたり移動させたりすることも当然可能である。つまり、視点とするべき方向としてx軸正方向を設定して三次元画像を見た後に、ユーザがy軸正方向からの画像も見たくなった場合には、ユーザが操作部16を介してその旨を入力することにより、その情報が視点設定部40に送信される。この際には、視点設定部40は、視点とするべき方向としてy軸正方向を設定する。そして、データ変換部41は、既に記録された光音響画像データとそれに関連付けられた第2の空間情報を再取得して、視点がy軸正方向にある光音響画像を再計算することになる。例えば、基本設定として被検部位の横断面を遠位側(心臓から遠い側)から見た画像を常に表示するなどの設定が考えられる。
【0066】
操作部16は、ユーザが撮像に必要な情報を入力するためのものである。例えば、ユーザは、操作部16を用いて、光音響画像が表示される際の視点方向を指定したり、患者の情報や撮像条件についての情報を入力する。
【0067】
以上のように、本発明に係る光音響撮像装置および方法は、第2の空間情報によって規定される少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択し、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するから、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。この結果、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることが可能となる。
【0068】
(設計変更)
上記の実施形態では、レーザ光源12に同期して情報取得部14が必要な情報を取得する場合(つまり、レーザ光源12が上位である場合)について、説明したが、本発明はこれに限られない。例えば、本発明に係る光音響撮像装置および方法は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。このように、情報取得部14が取得した第1の空間情報に従ってレーザ光源12からレーザ光を出力させる場合(つまり、情報取得部14が上位である場合)には、超音波探触子20の走査速度によらず、等間隔に光音響画像データを収集することが可能となる。予め設定される位置および向きは、例えばユーザが操作部16を用いて設定する。
【符号の説明】
【0069】
10 光音響撮像装置
11 システム制御部
12 レーザ光源
13 信号受信部
14 情報取得部
15 表示部
16 操作部
17 磁場発生部
18 磁気センサ
20 超音波探触子
21 光照射部
22 アレイ振動子
22a 超音波振動子
30 受信回路
31 変換部
32 処理選択部
33 遅延加算部
34 生データメモリ
35 位相整合加算部
36 検波・対数変換部
37 フレーム構築部
38 ボリュームデータ構築部
39 関連付け部
40 視点設定部
41 データ変換部
42 画像データ生成部
L レーザ光
M 被検部位
U 光音響波
【技術分野】
【0001】
本発明は、光が被検体に照射されることにより被検体内で発生した光音響波を検出して光音響画像を生成する光音響撮像装置および光音響撮像方法に関するものである。
【背景技術】
【0002】
従来、被検体の内部の断層画像を取得する方法としては、超音波が被検体内に照射されることにより被検体内で反射した超音波を検出して超音波画像を生成し、被検体内の形態的な断層画像を得る超音波イメージングが知られている。一方、被検体の検査においては形態的な断層画像だけでなく機能的な断層画像を表示する装置の開発も近年進められている。そして、このような装置の一つに光音響分析法を利用した装置がある。この光音響分析法は、所定の波長を有する光(例えば、可視光、近赤外光又は中間赤外光)を被検体に照射し、被検体内の特定物質がこの光のエネルギーを吸収した結果生じる弾性波である光音響波を検出して、その特定物質の濃度を定量的に計測するものである。被検体内の特定物質とは、例えば血液中に含まれるグルコースやヘモグロビンなどである。このように光音響波を検出しその検出信号に基づいて光音響画像を生成する技術は、光音響イメージング(PAI:Photoacoustic Imaging)或いは光音響トモグラフィー(PAT:Photo Acoustic Tomography)と呼ばれる。
【0003】
例えば特許文献1には、バンドルファイバを用いた光学系と超音波検出用の検出素子とが一体的に組み合わされた超音波探触子を使用して、三次元の光音響画像を生成可能な光音響撮像装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−12295号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、光音響画像を三次元で表示する場合には、従来、超音波探触子の走査開始位置における最初の1ラインの断層画像データを基準にして、取得された順に画像データが表示される。
【0006】
しかしながら、このような場合、表示された光音響画像の視点が、ユーザと被検体との位置関係、或いは超音波探触子の走査方向と無関係に決定されるため、ユーザにとって光音響画像の内容を把握するのに煩わしいという問題が生じうる。そこで、光音響画像をどの方向から見るかによって見え方が異なるため、ユーザが画像内容を容易に把握できるように、当該画像が最初に表示される段階で一定の方向に揃えるか、またはその画像を見る方向を指定できることが好ましい。
【0007】
本発明は上記問題に鑑みてなされたものであり、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることを可能とする光音響撮像装置および光音響撮像方法を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る光音響撮像装置は、
被検部位に測定光を照射する光照射部、および、測定光の照射により被検部位内で発生した光音響波を検出する超音波振動子が一次元に配列したアレイ振動子を有する超音波探触子と、
超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得する情報取得部と、
超音波探触子の走査によって検出された光音響波、および走査中に取得された第1の空間情報に基づいて、光音響画像データを生成する画像データ生成部と、
上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付ける関連付け部と、
第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定する視点設定部と、
上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するデータ変換部と、
変換された光音響画像データに基づく光音響画像を表示する表示部とを備えることを特徴とするものである。
【0009】
そして、本発明に係る光音響撮像装置において、視点設定部は、上記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえるものであることが好ましい。
【0010】
また、本発明に係る光音響撮像装置において、視点設定部は、複数生成された光音響画像データについて、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択するものであることが好ましい。
【0011】
また、本発明に係る光音響撮像装置において、情報取得部は、1フレーム分の撮像ごとに第1の空間情報を取得するものであることが好ましい。
【0012】
或いは、本発明に係る光音響撮像装置は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。
【0013】
また、本発明に係る光音響撮像装置において、情報取得部は、磁気センサユニットを含み、この磁気センサユニットを用いて第1の空間情報および第2の空間情報を取得するものであることが好ましい。
【0014】
本発明に係る光音響撮像方法は、
光音響撮像用の超音波探触子を備える光音響撮像装置を用いて、
超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
超音波探触子の走査によって検出された光音響波、および走査中に取得された第1の空間情報に基づいて、光音響画像データを生成し、
上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、
第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定し、
上記視点とするべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換し、
変換された光音響画像データに基づく光音響画像を表示することを特徴とするものである。
【0015】
そして、本発明に係る光音響撮像方法において、上記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえることが好ましい。
【0016】
また、本発明に係る光音響撮像方法において、複数生成された光音響画像データについて、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択することが好ましい。
【0017】
また、本発明に係る光音響撮像方法において、1フレーム分の撮像ごとに第1の空間情報を取得することが好ましい。
【0018】
或いは、本発明に係る光音響撮像方法は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。
【0019】
また、本発明に係る光音響撮像方法において、磁気センサユニットを用いて第1の空間情報および第2の空間情報を取得することが好ましい。
【発明の効果】
【0020】
本発明に係る光音響撮像装置および方法は、第2の空間情報によって規定される少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定し、上記視点とすべき方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するから、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。この結果、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施形態における光音響撮像装置の構成を示す概略図である。
【図2】実施形態における信号処理部の構成を示す概略図である。
【図3】実施形態における超音波探触子の構成を示す概略図である。
【図4】1フレーム分の画像データが順次空間座標上に並べられる様子を示す概略図である。
【図5】撮像部位ごとの軸の例を示す概略図である。
【図6A】モデル化された三次元の光音響画像を示す概略図である。(a)は斜視図、(b)は平面図、(c)は正面図、(d)は右側面図である。
【図6B】モデル化された三次元の光音響画像を示す概略図である。(e)は左側面図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を用いて説明するが、本発明はこれに限られるものではない。なお、視認しやすくするため、図面中の各構成要素の縮尺等は実際のものとは適宜異ならせてある。
【0023】
図1は実施形態における光音響撮像装置の構成を示す概略図であり、図2は実施形態における信号処理部の構成を示す概略図であり、図3は実施形態における超音波探触子の構成を示す概略図である。
【0024】
本実施形態の光音響撮像装置10は、図1に示されるように、超音波探触子20、システム制御部11、レーザ光源12、信号受信部13、情報取得部14、表示部15および操作部16(ユーザインタフェース)を備えるものである。
【0025】
本実施形態において、信号受信部13は、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37、ボリュームデータ構築部38、関連付け部39、視点設定部40およびデータ変換部41から構成される。
【0026】
また、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37およびボリュームデータ構築部38が全体として本発明における画像データ生成部42に相当する。
【0027】
そして、本実施形態の光音響撮像方法は、光音響撮像装置10を使用して、
情報取得部14によって、超音波探触子20の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位Mの実空間における軸の向き、超音波探触子20の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
画像データ生成部42によって、超音波探触子20の走査によって検出された光音響波U、および走査中に取得された第1の空間情報に基づいて、三次元の光音響画像データを生成し、
関連付け部39によって、上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、
視点設定部40によって、第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択し、かつこの1つの方向について順方向か逆方向かの選択をして、2つの選択結果に基づいて視点とするべき方向を設定し、
データ変換部41によって、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換し、
表示部15によって、変換された光音響画像データに基づく光音響画像を表示するものである。
【0028】
超音波探触子20は、光照射部21およびアレイ振動子22から構成され、被検部位からの光音響波を検出するものである。なお、本実施形態では、情報取得部14の一部を構成する磁気センサが超音波探触子20に内蔵されている。
【0029】
光照射部21は、アレイ振動子22の近傍からレーザ光Lを被検部位に向けて照射する光学要素である。例えば図3に示されるように、光照射部21は、レーザ光源12から出力されたレーザ光Lをアレイ振動子22の近傍に導光する光ファイバ50の先端部に接続された導光板52である。また、光ファイバ50の先端部から出射したレーザ光Lをそのまま被検部位に照射する場合には、光照射部21は光ファイバ50の当該先端部となる。光照射部21は、例えばアレイ振動子22の周囲に沿って配列される。
【0030】
アレイ振動子22は、被検部位内で発生した光音響波Uを検出する検出素子である。アレイ振動子22は、図3に示されるように、1次元状に配列された複数の超音波振動子22aから構成される。超音波振動子22aは、例えば、圧電セラミクス、またはポリフッ化ビニリデン(PVDF)のような高分子フィルムから構成される圧電素子である。超音波振動子22aは、光音響波Uを検出した場合にその音響信号を電気信号に変換する機能を有している。この電気信号は後述する受信回路30に出力される。超音波探触子22aは、セクタ走査タイプ、リニア走査タイプ、コンベックス走査タイプ等の中から診断対象となる被検部位に応じて適宜選択される。
【0031】
レーザ光の照射は、例えば光照射部21全体(図3においてすべての導光板52)によって同時に行われる。この場合、レーザ光の照射は、1ライン分の撮像(光音響画像の生成)ごとに行われる。このような検出方法によって音響信号に基づくデータは後述する遅延加算部33において遅延加算処理がなされる。
【0032】
或いは、レーザ光の照射は例えば被検部位の部分領域ごとに行うこともできる。このような場合、例えば導光板52は、領域A、領域Bおよび領域Cのそれぞれに対応して複数設けられる(図3)。その場合、領域Aに対応する導光板52aは領域Aの選択時にレーザ光を領域Aに照射する。そして、領域Bに対応する導光板52bは領域Bの選択時にレーザ光を領域Bに照射する。さらに、領域Cに対応する導光板52cは領域Cの選択時にレーザ光を領域Cに照射する。例えばアレイ振動子22が192ch分の超音波振動子22aから構成される場合を考える。アレイ振動子22の配列方向の幅は、光音響画像の生成に関連して例えば3つの部分領域(領域A〜C)に分割されており、各部分領域の幅は64ch分の超音波振動子22aの幅に相当する幅であるとする。光音響撮像装置10は、部分領域への光照射および信号検出をそれぞれの部分領域に対して1回ずつ(計3回)繰り返し行い、全192ch分のデータを取得することにより、1フレーム分の撮像を実施する。このような検出方法によって音響信号に基づくデータは、後述する生データメモリ34に一旦保存された後、位相整合加算部35において位相整合加算処理がなされる。
【0033】
超音波探触子20は、光音響波を効率よく検出するために音響整合層をアレイ振動子22の表面に備えてもよい。一般に圧電素子材料と生体では音響インピーダンスが大きく異なるため、圧電素子材料と生体が直接接した場合には、界面での反射が大きくなり光音響波を効率よく検出することができない。このため、圧電素子材料と生体の間に中間的な音響インピーダンスを有する音響整合層が配置されることにより、光音響波を効率よく検出することができる。音響整合層を構成する材料の例としては、エポキシ樹脂やシリコーンゴムなどが挙げられる。
【0034】
システム制御部11は、レーザ光源12、信号受信部13、情報取得部14、表示部15および操作部16を制御するものである。システム制御部11は、例えばこれらが同期をとるためのトリガ信号を出力する。
【0035】
レーザ光源12は、被検部位に照射すべきレーザ光Lを測定光として出力するものである。レーザ光源12は、例えば、血液の吸収ピークに含まれる波長のレーザ光を発生させる1以上の光源を有する。光源として、特定の波長成分又はその成分を含む単色光を発生する半導体レーザ(LD)、固体レーザ、ガスレーザ等の発光素子を用いることができる。例えば本実施形態においてレーザ光源12は、励起光源であるフラッシュランプとレーザ発振を制御するQスイッチレーザとを含むものとする。レーザ光源12は、システム制御部11がフラッシュランプトリガ信号を出力すると、フラッシュランプを点灯し、Qスイッチレーザを励起する。
【0036】
本発明では、レーザ光の波長は、撮像対象となる被検体内の物質の光吸収特性に合わせて適宜決定される。生体内のヘモグロビンは、その状態(酸素化ヘモグロビン、脱酸素化ヘモグロビン、メトヘモグロビン、炭酸ガスヘモグロビン、等)により光学的な吸収係数が異なる。例えば撮像対象が生体内のヘモグロビンである場合(つまり、生体内部の血管を撮像する場合)には、生体の光透過性が良く、かつ各種ヘモグロビンが光の吸収ピークを持つ600〜1000nm程度とすることが好ましい。
【0037】
レーザ光源12は、レーザ光として1〜100nsecのパルス幅を有するパルス光を出力するものであることが好ましい。そして、上記レーザ光の出力は、レーザ光と光音響波の伝搬ロス、光音響変換の効率および現状の検出器の検出感度等の観点から、10μJ/cm2〜数10mJ/cm2であることが好ましい。さらに、パルス光出力の繰り返しは、画像構築速度の観点から、10Hz以上であることが好ましい。また、レーザ光は上記パルス光が複数並んだパルス列とすることもできる。レーザ光源12から出力されたレーザ光は、例えば光ファイバ、導光板、レンズおよびミラー等の導光手段を用いて超音波探触子20のアレイ振動子22の近傍まで導光され、アレイ振動子22の近傍から被検部位に照射される。
【0038】
信号受信部13は、検出した音響信号から光音響画像を生成するものである。この光音響画像の生成は、受信回路30、AD変換部31、処理選択部32、遅延加算部33、生データメモリ34、位相整合加算部35、検波・対数変換部36、フレーム構築部37、ボリュームデータ構築部38、関連付け部39、視点設定部40およびデータ変換部41によって実現される。
【0039】
受信回路30は、超音波探触子20から出力された光音響波の電気信号を受信するものである。受信された電気信号はAD変換部31に出力される。
【0040】
AD変換部31は電気信号をデジタル信号に変換するサンプリング手段である。例えばAD変換部31は、受信回路30が受信した電気信号を、例えばシステム制御部11が出力するクロック周波数40MHzのADクロック信号に同期してデジタル信号に変換する。
【0041】
処理選択部32は、AD変換部31においてサンプリングしたデジタル信号(サンプリングデータ)を再構成するための処理を選択するものである。処理選択部32は、サンプリングデータを再構成する処理として、遅延加算処理または位相整合加算処理を選択し、遅延加算処理を選択した場合にはサンプリングデータを遅延加算部33へ送信し、位相整合加算処理を選択した場合にはサンプリングデータを生データメモリ34へ送信する。
【0042】
遅延加算部33は、例えば超音波振動子22aのそれぞれが検出した信号から得られたそれぞれのサンプリングデータを、超音波振動子22aの位置に応じた遅延時間で加算し、再構成された1ライン分の信号データを生成する(遅延加算法)。遅延加算処理が行われる場合には、レーザ光の照射は超音波探触子20の位置を固定した状態で複数回行われるため、照射ごとに超音波振動子22aのチャンネルをずらしながら1ライン分の信号データが生成される。なお、この遅延加算部33は、遅延加算法に代えて、CBP法(Circular Back Projection)により再構成を行うものでもよい。あるいは遅延加算部33は、ハフ変換法又はフーリエ変換法を用いて再構成を行うものでもよい。
【0043】
さらに、1ライン分の信号データには、後述する情報取得部14によって取得された超音波探触子20の実空間における位置およびその向きを規定する空間情報であってその1ライン分の信号データの基となった音響信号が検出された時の空間情報(第1の空間情報)が関連付けられる。これにより、その1ライン分の信号データが実空間におけるどのライン部分に位置するものなのかを決定することができる。遅延加算部33は、上記のようにして再構成された信号データを検波・対数変換部36に出力する。
【0044】
生データメモリ34は、例えば超音波振動子22aのそれぞれが検出した信号から得られたそれぞれの生のサンプリングデータをすべて一旦記憶するものである。
【0045】
位相整合加算部35は、生データメモリ34に記憶された生のサンプリングデータに基づいて、それぞれのサンプリングデータを位相整合加算することにより、超音波振動子22aのチャンネルごとに1ライン分の信号データを生成するものである。位相整合加算部35は、例えばDSP(Digital Signal Processor)またはFPGA(Field Programmable Gate Array)を含むことが好ましい。位相整合加算部35は、上記のようにして再構成された信号データを検波・対数変換部36に出力する。
【0046】
検波・対数変換部36は、遅延加算部33または位相整合加算部35から出力された1ライン分の信号データの包絡線を生成し、次いでその包絡線を対数変換してダイナミックレンジを広げる。そして、検波・対数変換部36は、上記のようにして信号処理した1ライン分の信号データをフレーム構築部37に出力する。
【0047】
フレーム構築部37は、複数の1ライン分の信号データを組み合わせて、1フレーム(1断面)分の画像データを生成するものである。フレーム構築部37は、例えば1ライン分のデータの時間軸の位置を、断層画像における深さを表す変位軸の位置に変換して1フレーム分の画像データを構築する。構築された1フレーム分の画像データはボリュームデータ構築部38へ出力される。
【0048】
ボリュームデータ構築部38は、超音波探触子20の走査位置ごとに生成された1フレーム分の画像データに基づいて、1フレーム分の画像データを重畳させて空間座標に並べたり、取得したデータの間を補間しながら三次元の光音響画像用のボリュームデータを構築したりするものである。上記のようにしてボリュームデータ構築部38によって作成された三次元的な視覚効果を有する画像データを光音響画像データと称する。
【0049】
関連付け部39は、後述する情報取得部14によって取得された第2の空間情報(被検部位の実空間における軸の向き、超音波探触子の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する空間情報)を光音響画像データに関連付けるものである。第2の空間情報の関連付けは、上記少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で行う。「光音響画像データに係る撮像部位」とは、光音響画像データに基づく光音響画像に実際に表される被検部位の部分を意味する。
【0050】
視点設定部40は、第2の空間情報が関連付けられた光音響画像データについて、当該第2の空間情報によって規定される上記少なくとも1つの方向の中から1つの方向を選択して、この選択結果に基づいて視点とするべき方向を設定するものである。なお、視点設定部40は、上記選択された1つの方向について、ユーザからの指示を受けて順方向か逆方向かの選択をするように構成してもよい。つまりこの場合には、この選択された1つの方向とその方向に対して順方向か逆方向かの選択結果に基づいて、その光音響画像データに基づく光音響画像を表示する際の視点の方向が決められる。
【0051】
このように視点とするべき方向が設定されると、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。視点設定部40において、方向の選択は、初期値として設定された方向またはユーザが操作部16を使用して入力した情報に従って行われる(図2)。これにより、ユーザは、必要に応じて、光音響画像が表示される際の視点を変更することが可能である。なお、光音響画像データを構築した仮想空間の中で、光音響画像データと視点との距離は、光音響画像の縮尺に応じて適宜調整される。つまり、光音響画像データと視点との距離は、画像の表示手段の画面上での縮尺に影響するものであるから、光音響画像が画面の中で適切な大きさで表示されるようにする。
【0052】
また、光音響画像を画面に表示する際に、画像のどの方向を画面上での「上方向」に設定するかについては、例えば被検部位と超音波探触子20とが接触している面を画面上での「上方向」とするよう基本設定しておく。このように基本設定しておくことで、ユーザは常に被検部位の表面が画面の中で上として表示された光音響画像を見ることができる。なお、画面上での「上方向」をどのように設定するかは、予め操作部16によって変更することも可能である。
【0053】
視点設定部40は、三次元の光音響画像データが複数生成された場合には、複数の光音響画像データのそれぞれに関して上記視点とするべき方向として、同一の要素を選択するものであることが好ましい。「要素」とは、第2の空間情報を構成する要素、並びに、順方向か逆方向かの要素を意味する。つまり、視点設定部40は、複数の光音響画像データのそれぞれについての上記視点とするべき方向が同一となるように、上記1つの方向を選択し、順方向か逆方向かの選択を行うことになる。なお、「同一」とは、実空間において物理的に同一であるという意味ではなく、例えば「超音波探触子の実空間における走査方向」のような選択された項目が同一であるという意味である。
【0054】
データ変換部41は、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するものである。変換方法としては、例えば座標変換等の公知の方法により行うことができる。変換された光音響画像データは表示部15へ出力される。
【0055】
また、データ変換部41は、光音響画像データとして、三次元のボリュームデータを一括して出力してもよいし、1フレーム分の画像データを順次出力するようにしてもよい。前者の場合には、超音波探触子20の1回の走査が終了した時点で所定の視点となるように画像が表示される。一方、後者の場合には、図4に示されるように、超音波探触子20の走査の進捗に合わせて1フレーム分の画像データが順次表示されるようになる。例えば、視点とするべき方向として超音波探触子20の走査方向の順方向が設定されている場合には、表示手段15の画面上では、1フレーム分の画像データが、仮想空間の中で奥から手前に向かって重畳されながら表示される。一方、視点とするべき方向として超音波探触子20の走査方向の逆方向が設定されている場合には、表示手段15の画面上では、1フレーム分の画像データが、仮想空間の中で手前から奥に向かって重畳されながら表示される。例えば、図4は、手前に行くに従って細くなる血管Vを撮像した場合において、後方にある画像が透けるように画像の中心がずらされながら、1フレーム分の画像データ55が空間座標上で手前に順次並べられる様子を示す。
【0056】
情報取得部14は、超音波探触子20の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、被検部位Mの実空間における軸の向き、超音波探触子20の実空間における走査方向、および実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得するものである。「被検部位Mの実空間における軸の向き」とは、被検部位を包含する頭部、胴体または四肢の中心軸を意味する。例えば、図5に示されるように、胴体Dの中心軸とは胴体の長さ方向に沿って中心を通る軸αであり、上肢Eの中心軸とは上肢の長さ方向に沿って中心を通る軸βであり、下肢Fの中心軸とは下肢の長さ方向に沿って中心を通る軸γである。なお、軸の正負の取り方は任意である。また、上肢および下肢が関節で屈曲している場合には、関節で分離した上腕、前腕、大腿および下腿のそれぞれで同様に中心軸を求めることもできる。「超音波探触子20の実空間における走査方向」とは、図3に示されるように、超音波探触子20を走査する方向を意味し、通常は、超音波振動子22aの配列方向に垂直で、かつ被検部位の表面に沿った方向となる。
【0057】
情報取得部14は、磁場発生部17および複数の磁気センサ18を有する磁気センサユニットを含み、この磁気センサユニットを使用して空間情報を取得する。磁気センサユニットは、磁場発生部17が形成するパルス磁場上の空間において、磁場発生部17に対する磁気センサ18の相対的位置座標(x、y、z)、および磁気センサ18の姿勢情報(角度(α、β、γ)の情報)を取得することができる。
【0058】
したがって、超音波探触子20の実空間における位置は、例えば2つの磁気センサ18が取得した自身が存在する位置に基づいて、その中間位置として求めることができる。また、超音波探触子20の実空間における向きは、2つの磁気センサ18のうち一方磁気センサ(例えば超音波探触子20の裏側のセンサ)から他方の磁気センサ(例えば超音波探触子20の表側のセンサ)へ向かうベクトルを算出することにより求めることができる。また、被検部位Mの実空間における軸の向きは、磁気センサユニットを用いて被検部位を包含する頭部、胴体または四肢の中心軸を規定する2点を決定することにより求めることができる。具体的には、例えば上肢の場合には、肩の位置に超音波探触子20を配置してその位置を情報取得部14に記憶させ、その後手先の位置に超音波探触子20を配置してその位置を情報取得部14に記憶させれば、上肢の中心軸βを規定する2点が得られる。また、超音波探触子20の実空間における走査方向は、超音波探触子20の実空間における位置の時間的な変化に基づいて求めることができる。また、実空間の鉛直方向は、例えば磁場発生部17によって規定される座標系のz軸とすることができる。
【0059】
磁気センサ18は、超音波探触子20の実空間における位置およびその向きを正確に取得するために、超音波振動子22aの配列方向を規定するために2つ、超音波振動子22aの配列方向に垂直で、かつ被検部位の表面と交わる方向を規定するために2つの少なくとも4つ必要である。
【0060】
例えば、第1の空間情報は1フレーム分の撮像ごとに取得される。具体的には、情報取得のタイミングをレーザ光源12の出力に同期させることにより、撮像ごとの情報取得が可能である。
【0061】
表示部15は、データ変換部41によって変換された光音響画像データに基づく光音響画像を表示するものである。図6Aおよび5Bは、モデル化された三次元の光音響画像を示す概略図である。そして、図6Aaは当該光音響画像の斜視図、図6Abは当該光音響画像の平面図、図6Acは当該光音響画像の正面図、図6Adは当該光音響画像の右側面図、図6Beは当該光音響画像の右側面図である。図6Aおよび5Bでは、撮像部位として例えば3つの立方体が表現されている。また、当該光音響画像データには、直交系のx軸、y軸およびz軸が関連付けられており、例えばx軸は超音波探触子の実空間における走査方向、y軸は被検部位の実空間における軸の向き、z軸は実空間の鉛直方向であるとする。なお、上記の例では、光音響画像データに3つの方向が関連付けられているが、関連付けられる方向は1つでもよい。また、上記の例では、3つの方向が直交系を成すように設定されているが、これらの方向は必ずしも直交系である必要はない。
【0062】
例えば、視点設定部40が3つの方向の中から「実空間の鉛直方向」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてz軸正方向を設定した場合には、図6Abに示されるように、立方体の面のうち「Z」と記載された面が見えるように、x−y平面Pxyに投影された当該光音響画像が表示される。また、視点設定部40が3つの方向の中から「被検部位の実空間における軸の向き」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてy軸正方向を設定した場合には、図6Acに示されるように、立方体の面のうち「Y」と記載された面が見えるように、z−x平面Pzxに投影された当該光音響画像が表示される。また、視点設定部40が3つの方向の中から「超音波探触子の実空間における走査方向」を選択し、かつ順方向か逆方向かの選択において「順方向」を選択した結果、視点とするべき方向としてx軸正方向を設定した場合には、図6Adに示されるように、立方体の面のうち「X」と記載された面が見えるように、y−z平面Pyzに投影された当該光音響画像が表示される。
【0063】
さらに、視点設定部40が3つの方向の中から「超音波探触子の実空間における走査方向」を選択し、かつ順方向か逆方向かの選択において「逆方向」を選択した結果、視点とするべき方向としてx軸負方向を設定した場合には、図6Beに示されるように、立方体の面のうち「X」と記載された面が裏側から見えるように、y−z平面Pyzに投影された当該光音響画像が表示される。
【0064】
このように、三次元の光音響画像が常に実空間と関連付けられた特定の方向から見た画像として表示されるため、ユーザは光音響画像の内容を容易に把握しやすくなる。
【0065】
なお、上記の表示方法は、光音響画像が表示部に表示された初期段階における表示方法であるため、一旦光音響画像が表示された後、ユーザが必要に応じて当該画像を回転させたり移動させたりすることも当然可能である。つまり、視点とするべき方向としてx軸正方向を設定して三次元画像を見た後に、ユーザがy軸正方向からの画像も見たくなった場合には、ユーザが操作部16を介してその旨を入力することにより、その情報が視点設定部40に送信される。この際には、視点設定部40は、視点とするべき方向としてy軸正方向を設定する。そして、データ変換部41は、既に記録された光音響画像データとそれに関連付けられた第2の空間情報を再取得して、視点がy軸正方向にある光音響画像を再計算することになる。例えば、基本設定として被検部位の横断面を遠位側(心臓から遠い側)から見た画像を常に表示するなどの設定が考えられる。
【0066】
操作部16は、ユーザが撮像に必要な情報を入力するためのものである。例えば、ユーザは、操作部16を用いて、光音響画像が表示される際の視点方向を指定したり、患者の情報や撮像条件についての情報を入力する。
【0067】
以上のように、本発明に係る光音響撮像装置および方法は、第2の空間情報によって規定される少なくとも1つの方向と光音響画像データに係る撮像部位との実空間における位置関係が保持された状態で、第2の空間情報を光音響画像データに関連付け、第2の空間情報が関連付けられた光音響画像データについて、上記少なくとも1つの方向の中から1つの方向を選択し、選択された上記1つの方向から見られた画像として、光音響画像データに基づく光音響画像が表示部に表示されるように、当該光音響画像データを変換するから、三次元の光音響画像は常に実空間と関連付けられた特定の方向から見た画像として表示される。この結果、三次元の光音響画像を表示する場合において、ユーザにとって光音響画像の内容を容易に把握しやすくすることが可能となる。
【0068】
(設計変更)
上記の実施形態では、レーザ光源12に同期して情報取得部14が必要な情報を取得する場合(つまり、レーザ光源12が上位である場合)について、説明したが、本発明はこれに限られない。例えば、本発明に係る光音響撮像装置および方法は、第1の空間情報によって規定される位置および向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものとすることができる。このように、情報取得部14が取得した第1の空間情報に従ってレーザ光源12からレーザ光を出力させる場合(つまり、情報取得部14が上位である場合)には、超音波探触子20の走査速度によらず、等間隔に光音響画像データを収集することが可能となる。予め設定される位置および向きは、例えばユーザが操作部16を用いて設定する。
【符号の説明】
【0069】
10 光音響撮像装置
11 システム制御部
12 レーザ光源
13 信号受信部
14 情報取得部
15 表示部
16 操作部
17 磁場発生部
18 磁気センサ
20 超音波探触子
21 光照射部
22 アレイ振動子
22a 超音波振動子
30 受信回路
31 変換部
32 処理選択部
33 遅延加算部
34 生データメモリ
35 位相整合加算部
36 検波・対数変換部
37 フレーム構築部
38 ボリュームデータ構築部
39 関連付け部
40 視点設定部
41 データ変換部
42 画像データ生成部
L レーザ光
M 被検部位
U 光音響波
【特許請求の範囲】
【請求項1】
被検部位に測定光を照射する光照射部、および、前記測定光の照射により前記被検部位内で発生した光音響波を検出する超音波振動子が一次元に配列したアレイ振動子を有する超音波探触子と、
前記超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、前記被検部位の前記実空間における軸の向き、前記超音波探触子の前記実空間における走査方向、および前記実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得する情報取得部と、
前記超音波探触子の走査によって検出された前記光音響波、および前記走査中に取得された前記第1の空間情報に基づいて、光音響画像データを生成する画像データ生成部と、
前記少なくとも1つの方向と前記光音響画像データに係る撮像部位との前記実空間における位置関係が保持された状態で、前記第2の空間情報を前記光音響画像データに関連付ける関連付け部と、
第2の空間情報が関連付けられた前記光音響画像データについて、該第2の空間情報によって規定される前記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定する視点設定部と、
前記視点とするべき方向から見られた画像として、前記光音響画像データに基づく光音響画像が表示部に表示されるように、前記光音響画像データを変換するデータ変換部と、
変換された前記光音響画像データに基づく前記光音響画像を表示する前記表示部とを備えることを特徴とする光音響撮像装置。
【請求項2】
前記視点設定部が、前記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえるものであることを特徴とする請求項1に記載の光音響撮像装置。
【請求項3】
前記視点設定部が、複数生成された光音響画像データについて、前記複数の光音響画像データのそれぞれに関して前記視点とするべき方向として、同一の要素を選択するものであることを特徴とする請求項1または2に記載の光音響撮像装置。
【請求項4】
前記情報取得部が、1フレーム分の撮像ごとに前記第1の空間情報を取得するものであることを特徴とする請求項1から3いずれかに記載の光音響撮像装置。
【請求項5】
前記第1の空間情報によって規定される前記位置および前記向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものであることを特徴とする請求項1から3いずれかに記載の光音響撮像装置。
【請求項6】
前記情報取得部が、磁気センサユニットを含み、該磁気センサユニットを用いて前記第1の空間情報および前記第2の空間情報を取得するものであることを特徴とする請求項1から5いずれかに記載の光音響撮像装置。
【請求項7】
光音響撮像用の超音波探触子を備える光音響撮像装置を用いて、
前記超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、前記被検部位の前記実空間における軸の向き、前記超音波探触子の前記実空間における走査方向、および前記実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
前記超音波探触子の走査によって検出された前記光音響波、および前記走査中に取得された前記第1の空間情報に基づいて、光音響画像データを生成し、
前記少なくとも1つの方向と前記光音響画像データに係る撮像部位との前記実空間における位置関係が保持された状態で、前記第2の空間情報を前記光音響画像データに関連付け、
第2の空間情報が関連付けられた前記光音響画像データについて、該第2の空間情報によって規定される前記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定し、
選択された前記1つの方向から見られた画像として、前記光音響画像データに基づく光音響画像が表示部に表示されるように、前記光音響画像データを変換し、
変換された前記光音響画像データに基づく前記光音響画像を表示することを特徴とする光音響撮像方法。
【請求項8】
前記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえることを特徴とする請求項7に記載の光音響撮像方法。
【請求項9】
複数生成された光音響画像データについて、前記複数の光音響画像データのそれぞれに関して前記視点とするべき方向として、同一の要素を選択することを特徴とする請求項7または8に記載の光音響撮像方法。
【請求項10】
1フレーム分の撮像ごとに前記第1の空間情報を取得することを特徴とする請求項7から9いずれかに記載の光音響撮像方法。
【請求項11】
前記第1の空間情報によって規定される前記位置および前記向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施することを特徴とする請求項7から9いずれかに記載の光音響撮像方法。
【請求項12】
磁気センサユニットを用いて前記第1の空間情報および前記第2の空間情報を取得することを特徴とする請求項7から11いずれかに記載の光音響撮像方法。
【請求項1】
被検部位に測定光を照射する光照射部、および、前記測定光の照射により前記被検部位内で発生した光音響波を検出する超音波振動子が一次元に配列したアレイ振動子を有する超音波探触子と、
前記超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、前記被検部位の前記実空間における軸の向き、前記超音波探触子の前記実空間における走査方向、および前記実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得する情報取得部と、
前記超音波探触子の走査によって検出された前記光音響波、および前記走査中に取得された前記第1の空間情報に基づいて、光音響画像データを生成する画像データ生成部と、
前記少なくとも1つの方向と前記光音響画像データに係る撮像部位との前記実空間における位置関係が保持された状態で、前記第2の空間情報を前記光音響画像データに関連付ける関連付け部と、
第2の空間情報が関連付けられた前記光音響画像データについて、該第2の空間情報によって規定される前記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定する視点設定部と、
前記視点とするべき方向から見られた画像として、前記光音響画像データに基づく光音響画像が表示部に表示されるように、前記光音響画像データを変換するデータ変換部と、
変換された前記光音響画像データに基づく前記光音響画像を表示する前記表示部とを備えることを特徴とする光音響撮像装置。
【請求項2】
前記視点設定部が、前記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえるものであることを特徴とする請求項1に記載の光音響撮像装置。
【請求項3】
前記視点設定部が、複数生成された光音響画像データについて、前記複数の光音響画像データのそれぞれに関して前記視点とするべき方向として、同一の要素を選択するものであることを特徴とする請求項1または2に記載の光音響撮像装置。
【請求項4】
前記情報取得部が、1フレーム分の撮像ごとに前記第1の空間情報を取得するものであることを特徴とする請求項1から3いずれかに記載の光音響撮像装置。
【請求項5】
前記第1の空間情報によって規定される前記位置および前記向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施するものであることを特徴とする請求項1から3いずれかに記載の光音響撮像装置。
【請求項6】
前記情報取得部が、磁気センサユニットを含み、該磁気センサユニットを用いて前記第1の空間情報および前記第2の空間情報を取得するものであることを特徴とする請求項1から5いずれかに記載の光音響撮像装置。
【請求項7】
光音響撮像用の超音波探触子を備える光音響撮像装置を用いて、
前記超音波探触子の実空間における位置およびその向きを規定する第1の空間情報を取得し、かつ、前記被検部位の前記実空間における軸の向き、前記超音波探触子の前記実空間における走査方向、および前記実空間の鉛直方向のうち少なくとも1つの方向を規定する第2の空間情報を取得し、
前記超音波探触子の走査によって検出された前記光音響波、および前記走査中に取得された前記第1の空間情報に基づいて、光音響画像データを生成し、
前記少なくとも1つの方向と前記光音響画像データに係る撮像部位との前記実空間における位置関係が保持された状態で、前記第2の空間情報を前記光音響画像データに関連付け、
第2の空間情報が関連付けられた前記光音響画像データについて、該第2の空間情報によって規定される前記少なくとも1つの方向の中から1つの方向を選択して、選択結果に基づいて視点とするべき方向を設定し、
選択された前記1つの方向から見られた画像として、前記光音響画像データに基づく光音響画像が表示部に表示されるように、前記光音響画像データを変換し、
変換された前記光音響画像データに基づく前記光音響画像を表示することを特徴とする光音響撮像方法。
【請求項8】
前記選択された1つの方向について、さらに順方向か逆方向かの選択をし、この選択結果も踏まえることを特徴とする請求項7に記載の光音響撮像方法。
【請求項9】
複数生成された光音響画像データについて、前記複数の光音響画像データのそれぞれに関して前記視点とするべき方向として、同一の要素を選択することを特徴とする請求項7または8に記載の光音響撮像方法。
【請求項10】
1フレーム分の撮像ごとに前記第1の空間情報を取得することを特徴とする請求項7から9いずれかに記載の光音響撮像方法。
【請求項11】
前記第1の空間情報によって規定される前記位置および前記向きのそれぞれが、予め設定された位置および向きと略一致した場合に、1フレーム分の撮像を実施することを特徴とする請求項7から9いずれかに記載の光音響撮像方法。
【請求項12】
磁気センサユニットを用いて前記第1の空間情報および前記第2の空間情報を取得することを特徴とする請求項7から11いずれかに記載の光音響撮像方法。
【図1】


【図2】

【図3】
【図5】
【図6A】

【図6B】
【図4】

【図2】
【図3】
【図5】
【図6A】
【図6B】
【図4】
【公開番号】特開2013−70847(P2013−70847A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212134(P2011−212134)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
[ Back to top ]