
免震装置監視システム
【課題】高精度で予期せぬ免震装置の異常の発生を把握することのできる免震装置監視システムを得る。
【解決手段】監視装置20により、免震装置12の水平ずれ量、装置高さ変動量、フランジ傾き、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平ずれ量、装置高さ変動量、フランジ傾き、および温度に基づいて免震装置12の時間経過に伴う変形の状態を示す変形状態情報を表示する。
【解決手段】監視装置20により、免震装置12の水平ずれ量、装置高さ変動量、フランジ傾き、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平ずれ量、装置高さ変動量、フランジ傾き、および温度に基づいて免震装置12の時間経過に伴う変形の状態を示す変形状態情報を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、免震装置監視システムに関する。
【背景技術】
【0002】
従来、信頼性の高い健全性評価を簡易かつ小型の装置で行うことができる建築物の疲労損傷監視装置を提供することを目的として、特許文献1には、疲労損傷の評価対象となる建築物に取り付けられる装置であって、前記建築物の変位を測定する変位測定手段と、前記建築物の疲労損傷値を記憶する記憶手段と、前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段と、を備えることを特徴とする建築物の疲労損傷監視装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−78370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年、地震動による建築物の揺れを抑制することを目的として、建築物の底部に免震層を設け、当該免震層内に2次元状に複数の免震装置を設ける免震建物が採用されるようになってきており、免震建物に設けられた免震装置の変形量を評価するシステムが要望されている。
【0005】
ここで、免震装置においては、経時的な変形量が設置位置における温度に大きく依存するため、当該温度は極めて重要なパラメータとなるが、上記特許文献1に開示されている技術では、温度に関しては何ら考慮されていないため、免震装置の健全性を高精度で評価することができない、という問題点があった。
【0006】
また、上記特許文献1に開示されている技術は、常時監視するものとはなっていないため、予期せぬ免震装置の異常の発生を把握することが困難である、という問題点もあった。
【0007】
本発明は上記問題点を解決するためになされたものであり、高精度で予期せぬ免震装置の異常の発生を把握することのできる免震装置監視システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、請求項1記載の免震装置監視システムは、同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量を予め定められた時間間隔で計測して送信する第1計測送信装置と、少なくとも1つの前記免震装置の鉛直変位量を前記時間間隔で計測して送信する第2計測送信装置と、少なくとも1つの前記免震装置の温度を前記時間間隔で計測して送信する第3計測送信装置と、前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度を受信する受信手段と、前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度を時系列順で記憶する記憶手段と、前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示手段により表示するように制御する制御手段と、を備えている。
【0009】
請求項1記載の免震装置監視システムによれば、第1計測送信装置により、同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量が予め定められた時間間隔で計測されて送信され、第2計測送信装置により、少なくとも1つの前記免震装置の鉛直変位量が前記時間間隔で計測されて送信され、さらに第3計測送信装置により、少なくとも1つの前記免震装置の温度が前記時間間隔で計測されて送信される。
【0010】
ここで、本発明では、受信手段により、前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度が受信され、記憶手段により、前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度が時系列順で記憶される。なお、上記記憶手段には、RAM(Random Access Memory)、ROM(Read Only Memory)、EEPROM(Electrically Erasable and Programmable Read Only Memory)、フラッシュEEPROM(Flash EEPROM)等の半導体記憶素子、フレキシブル・ディスク等の可搬記録媒体やハードディスク等の固定記録媒体、或いはネットワークに接続されたサーバ・コンピュータ等に設けられた外部記憶装置が含まれる。
【0011】
そして、本発明では、制御手段により、前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報が表示手段により表示されるように制御される。なお、上記表示手段による表示には、画像表示装置による可視表示の他、画像形成装置による永久可視表示、および音声発生装置による可聴表示が含まれる。
【0012】
このように、請求項1記載の免震装置監視システムによれば、免震装置の水平変位量、鉛直変位量、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる。
【0013】
なお、本発明は、請求項2に記載の発明のように、前記制御手段が、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御してもよい。これにより、免震装置が異常に変形したことを容易に把握することができる。
【0014】
また、本発明は、請求項3に記載の発明のように、前記記憶手段に記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測する予測手段をさらに備え、前記制御手段が、前記予測手段によって予測された前記変形状態情報を前記表示手段によりさらに表示するように制御してもよい。これにより、免震装置の異常な変形に起因する不具合の発生を未然に防止することができる。
【0015】
また、本発明は、請求項4に記載の発明のように、前記制御手段が、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段による記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御してもよい。これにより、計測情報を記憶するための記憶容量を節約することができる。
【0016】
特に、請求項4に記載の発明は、請求項5に記載の発明のように、前記制御手段が、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段への記憶を停止するように制御してもよい。これにより、計測情報を記憶するための記憶容量を、より節約することができる。
【発明の効果】
【0017】
本発明によれば、免震装置の水平変位量、鉛直変位量、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる、という効果が得られる。
【図面の簡単な説明】
【0018】
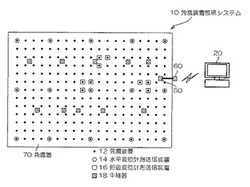
【図1】実施の形態に係る免震装置監視システムの全体構成を示す平面図(一部模式図)である。
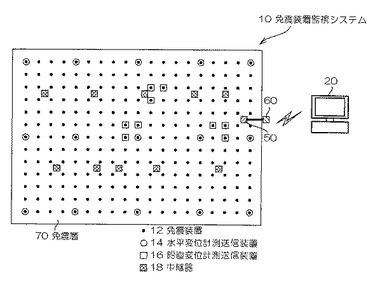
【図2】実施の形態に係る免震装置監視システムの部分構成および通信系統を示すブロック図である。
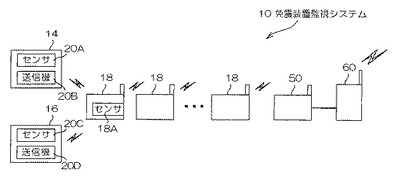
【図3】実施の形態に係る免震装置監視システムの各センサの設置位置、および計測対象とする水平ずれ量、装置高さ変動量、フランジ傾きの説明に供する平面図および側面図である。
【図4】実施の形態に係る監視装置の電気的な要部構成を示すブロック図である。
【図5】実施の形態に係る監視装置に備えられた二次記憶部の主な記憶内容を示す模式図である。
【図6】実施の形態に係る初期設定情報データベースの構成を示す模式図である。
【図7】実施の形態に係る管理情報データベースの構成を示す模式図である。
【図8】第1の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートである。
【図9】実施の形態に係るモニタリング画面の表示状態の一例を示す概略図である。
【図10】第2の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照して、本発明を実施するための形態について詳細に説明する。
【0020】
[第1の実施の形態]
まず、図1および図2を参照して、本発明が適用された免震装置監視システム10の構成を説明する。
【0021】
図1に示すように、本実施の形態に係る免震装置監視システム10は、当該システム10の中心的な役割を担う監視装置20と、当該システム10において監視対象としている免震建物における免震層70に2次元状に設けられた複数の免震装置12の少なくとも1つに設けられ、設けられている免震装置12の水平方向に対する変位量(以下、「水平変位量」という。)を計測して無線通信により送信する水平変位計測送信装置14と、当該複数の免震装置12の少なくとも1つに設けられ、設けられている免震装置12の鉛直方向に対する変位量(以下、「鉛直変位量」という。)を計測して無線通信により送信する鉛直変位計測送信装置16と、を有している。
【0022】
また、本実施の形態に係る免震装置監視システム10は、免震層70の予め定められた位置に設けられた少なくとも1つの中継器18を有している。なお、本実施の形態に係る中継器18は、設けられている位置の温度を計測する機能と、水平変位計測送信装置14から送信された水平変位量、鉛直変位計測送信装置16から送信された鉛直変位量、他の中継器18から送信された水平変位量、鉛直変位量、および温度を無線通信により受信する機能と、受信した水平変位量、鉛直変位量、温度と、自身が計測した温度とを無線通信により送信する機能と、を有している。
【0023】
なお、本実施の形態に係る水平変位計測送信装置14および鉛直変位計測送信装置16は、自身が計測した情報を、計測対象とする免震装置12および計測対象とする部位を示す情報(以下、「変位計測位置特定情報」という。)に関連付けて送信する。一方、本実施の形態に係る中継器18は、水平変位計測送信装置14、鉛直変位計測送信装置16、および他の中継器18から受信した情報を送信(転送)すると共に、自身が計測した温度を、自身が設けられている位置を示す情報(以下、「温度計測位置特定情報」という。)に関連付けて送信する。
【0024】
さらに、本実施の形態に係る免震装置監視システム10は、中継器18から送信された情報を受信する集約装置50と、集約装置50によって受信された情報を監視装置20に無線通信により送信(転送)する送信装置60と、を有している。
【0025】
図1に示すように、本実施の形態に係る免震装置監視システム10では、免震建物の水平方向に対する全体的な変形を把握しやすくするために、水平変位計測送信装置14を周辺部に位置される免震装置12と中間部に位置される免震装置12に対して分散して設けている。また、本実施の形態に係る免震装置監視システム10では、鉛直変位計測送信装置16を、免震建物における柱の間隔が相対的に広い領域等の鉛直方向に対する変形が生じやすい領域に位置される免震装置12に対して設けている。
【0026】
また、本実施の形態に係る免震装置監視システム10では、一例として図2に模式的に示すように、複数の中継器18が、最終的に全ての計測情報(水平変位量、鉛直変位量、温度)と、それらに関連付けた変位計測位置特定情報および温度計測位置特定情報とを集約装置50に転送可能な位置に分散して設けられている。
【0027】
図2および図3(A)に示すように、本実施の形態に係る水平変位計測送信装置14は、免震装置12の上部フランジにおける予め定められた複数の位置(図3(A)に示す例では、上部フランジの外周部における互いに1/4周離れた位置の2箇所)に設けられ、設けられている位置の水平変位量を計測するセンサ(本実施の形態では、ポテンショメータ)20Aと、センサ20Aにより計測された水平変位量を最寄りの中継器18に対して無線通信により送信する送信機20Bと、を備えている。
【0028】
また、図2および図3(B)に示すように、本実施の形態に係る鉛直変位計測送信装置16は、免震装置12の上部フランジにおける予め定められた複数の位置(図3(B)に示す例では、上部フランジの外周部における各々1/4周ずつ離れた位置の4箇所)に設けられ、設けられている位置の鉛直変位量を計測するセンサ(本実施の形態では、ポテンショメータ)20Cと、センサ20Cにより計測された鉛直変位量を最寄りの中継器18に対して無線通信により送信する送信機20Dと、を備えている。
【0029】
さらに、図2に示すように、本実施の形態に係る中継器18は、自身が設けられている位置の温度を計測するセンサ(本実施の形態では、サーミスタ)18Aを備えている。
【0030】
なお、本実施の形態に係る免震装置監視システム10では、予め定められた時間間隔(本実施の形態では1時間であり、以下、「単位時間間隔」という。)で、水平変位計測送信装置14および鉛直変位計測送信装置16から計測した情報等が送信される結果、集約装置50において集約(受信)された各種情報は単位時間間隔で送信装置60から監視装置20に送信される。
【0031】
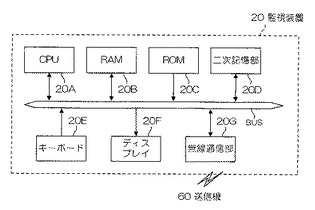
次に、図4を参照して、本免震装置監視システム10において特に重要な役割を有する監視装置20の電気系の要部構成を説明する。
【0032】
同図に示すように、本実施の形態に係る監視装置20は、監視装置20全体の動作を司るCPU(中央処理装置)20Aと、CPU20Aによる各種処理プログラムの実行時のワークエリア等として用いられるRAM20Bと、各種制御プログラムや各種パラメータ等が予め記憶されたROM20Cと、各種情報を記憶するために用いられる記憶手段としての二次記憶部(ここでは、ハードディスク装置)20Dと、各種情報を入力するために用いられるキーボード20Eと、各種情報を表示するために用いられるディスプレイ20Fと、送信装置60との間での無線通信動作を制御する無線通信部20Gと、が備えられており、これら各部はシステムバスBUSにより電気的に相互に接続されている。
【0033】
従って、CPU20Aは、RAM20B、ROM20C、および二次記憶部20Dに対するアクセス、キーボード20Eを介した各種入力情報の取得、ディスプレイ20Fに対する各種情報の表示、および無線通信部20Gを介した送信装置60との間の各種情報の授受を各々行うことができる。
【0034】
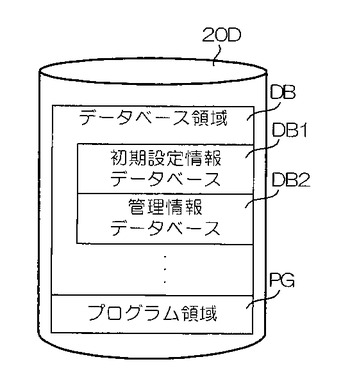
一方、図5には、監視装置20に備えられた二次記憶部20Dの主な記憶内容が模式的に示されている。
【0035】
同図に示すように、二次記憶部20Dには、各種データベースを記憶するためのデータベース領域DBと、各種アプリケーション・プログラム等を記憶するためのプログラム領域PGと、が設けられている。
【0036】
また、データベース領域DBには、初期設定情報データベースDB1および管理情報データベースDB2が含まれる。以下、各データベースの構成について詳細に説明する。
【0037】
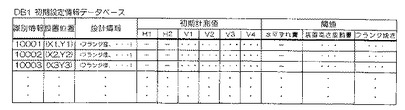
本実施の形態に係る初期設定情報データベースDB1は、図6に模式的に示すように、識別情報、設置位置、設計情報、初期計測値、および閾値の各情報が記憶されるように構成されている。
【0038】
なお、上記識別情報は、水平変位計測送信装置14または鉛直変位計測送信装置16が設けられている免震装置12を個別に特定するための情報であり、上記設置位置は、対応する免震装置12の免震層70における設置位置を特定するための情報である。なお、本実施の形態に係る免震装置監視システム10では、免震層70の平面視における予め定められた位置(本実施の形態では、図1における左上角部)を原点としたX−Y座標系により免震装置12の設置位置を規定するようにしており、前述した変位計測位置特定情報および温度計測位置特定情報も同一のX−Y座標系により規定するようにしている。
【0039】
また、上記設計情報は、対応する免震装置12のフランジ径、積層ゴムの総厚等といった設計仕様を示す情報であり、上記初期計測値は、対応する免震装置12に設けられている水平変位計測送信装置14により計測される水平変位量の基準となる位置の初期設置時点における実測値と、鉛直変位計測送信装置16のセンサ20Cの配設位置における上部フランジの高さの初期設置時点における実測値を示す情報である。なお、図6におけるH1〜H2は、対応する免震装置12の上部フランジに設けられた2つのセンサ20Aの各々に対応する上記基準となる位置の実測値であり、V1〜V4は、対応する免震装置12の上部フランジに設けられた4つのセンサ20Cの各々に対応する上記上部フランジの高さの実測値である。
【0040】
さらに、上記閾値は、対応する免震装置12の上部フランジの水平方向のずれ量(以下、「水平ずれ量」という。)、対応する免震装置12の上部フランジの高さの変動量(以下、「装置高さ変動量」という。)、および対応する免震装置12の上部フランジの傾き(以下、「フランジ傾き」という。)の各々の上限値を示す情報である。
【0041】
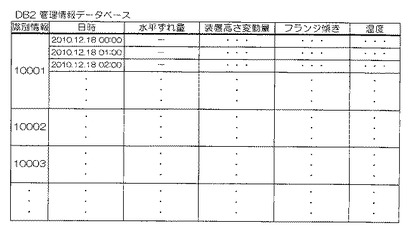
一方、管理情報データベースDB2は、図7に模式的に示すように、識別情報、日時、水平ずれ量、装置高さ変動量、フランジ傾き、および温度の各情報が記憶されるように構成されている。
【0042】
なお、上記識別情報は、初期設定情報データベースDB1の識別情報と同一の情報であり、上記日時は、計測日時を示す情報である。また、上記水平ずれ量は、対応する免震装置12について、対応する日時に計測された水平ずれ量を示す情報であり、上記装置高さ変動量は、対応する免震装置12について、対応する日時に計測された装置高さ変動量を示す情報であり、上記フランジ傾きは、対応する免震装置12について、対応する日時に計測されたフランジ傾きを示す情報であり、上記温度は、対応する免震装置12の最寄りの中継器18のセンサ18Aによって対応する日時に計測された温度を示す情報である。
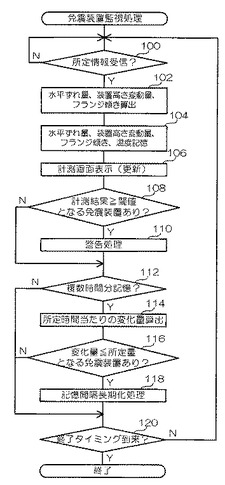
【0043】
次に、本実施の形態に係る免震装置監視システム10の作用として、図8を参照して、免震装置監視処理を実行する際の監視装置20の作用を説明する。なお、図8は、キーボード20Eを介して実行する旨の指示入力が行われた際に監視装置20のCPU20Aによって実行される免震装置監視処理プログラムの処理の流れを示すフローチャートであり、当該プログラムは二次記憶部20Dのプログラム領域PGに予め記憶されている。また、ここでは、錯綜を回避するために、初期設定情報データベースDB1が予め構築されている場合について説明する。
【0044】
同図のステップ100では、送信装置60からの水平変位量、鉛直変位量、および温度の各計測情報と、それらに関連付けた変位計測位置特定情報および温度計測位置特定情報との受信待ちを行い、次のステップ102では、初期設定情報データベースDB1から全ての初期計測値を読み出し、読み出した初期計測値と、受信した情報とに基づいて、水平変位計測送信装置14または鉛直変位計測送信装置16が設けられた免震装置12における水平ずれ量、装置高さ変動量、およびフランジ傾きを算出する。
【0045】
次のステップ104では、上記ステップ102の処理によって算出した水平ずれ量、装置高さ変動量、およびフランジ傾きと、上記ステップ100の処理によって受信した温度とを、この時点の日時を示す情報と共に管理情報データベースDB2の対応する領域に記憶(登録)する。
【0046】
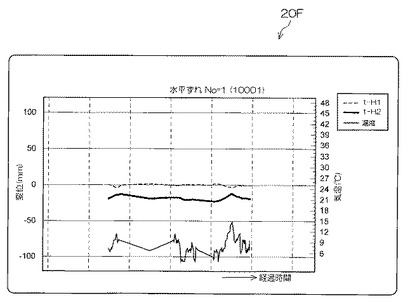
次のステップ106では、上記ステップ104の処理によって管理情報データベースDB2に記憶した温度と、水平ずれ量、装置高さ変動量、およびフランジ傾きの少なくとも1つとを、ディスプレイ20Fにより時系列で連続的に表示するように制御する。なお、図10には、本ステップ106の処理によって温度および水平ずれ量をディスプレイ20Fにより表示した場合の表示画面の一例が示されている。
【0047】
次のステップ108では、初期設定情報データベースDB1から全ての閾値を読み出し、上記ステップ104の処理によって管理情報データベースDB2に記憶した水平ずれ量、装置高さ変動量、およびフランジ傾きに、対応する閾値以上となる免震装置12が存在するか否かを判定し、否定判定となった場合は後述するステップ112に移行する一方、肯定判定となった場合にはステップ110に移行する。
【0048】
ステップ110では、予め定められた警告処理を実行し、その後にステップ112に移行する。なお、本実施の形態に係る免震装置監視処理プログラムでは、上記ステップ110において実行される警告処理として、監視装置20に内蔵された図示しないスピーカを予め定められた期間(本実施の形態では、1分間)だけ鳴動させる処理を適用しているが、これに限らず、ディスプレイ20Fにより警告する情報を表示する処理、監視装置20にプリンタを接続しておき、当該プリンタにより警告する情報を印刷する処理、LAN(Local Area Network)、インターネット等の通信回線を介して外部装置と接続し、当該外部装置に対して警告する情報を送信する処理等の各種処理を単独、または組み合わせて適用する形態としてもよい。
【0049】
ステップ112では、管理情報データベースDB2に水平ずれ量、装置高さ変動量、フランジ傾き、および温度を複数時間分記憶したか否かを判定し、否定判定となった場合は後述するステップ120に移行する一方、肯定判定となった場合にはステップ114に移行する。
【0050】
ステップ114では、この時点における直近の上記単位時間間隔(本実施の形態では、1時間)当たりの水平ずれ量、装置高さ変動量、およびフランジ傾きの変化量を算出し、次のステップ116にて、算出した変化量が、各々の変化量に対応して予め定められた量以下となる免震装置12(以下、「特定免震装置」という。)が存在するか否かを判定して、否定判定となった場合は後述するステップ120に移行する一方、肯定判定となった場合にはステップ118に移行する。なお、上記ステップ116の処理において適用する予め定められた量は、対応する変化量が当該量以下となった場合に、当該変化量が小さいため、以降の計測情報の記憶の頻度を低下させるようにするためのものであり、免震装置監視システム10の用途や要求される監視レベル等に応じて、ユーザによって予め設定された値を適用することができる。
【0051】
ステップ118では、上記特定免震装置に関して、上記ステップ104の処理によって管理情報データベースDB2に各種計測情報を記憶する時間間隔を、それまでより長くする(本実施の形態では、それまでの2倍の時間間隔)ように設定し、その後にステップ120に移行する。
【0052】
ステップ120では、予め定められた終了タイミングが到来したか否かを判定し、否定判定となった場合は上記ステップ100に戻る一方、肯定判定となった場合には、本免震装置監視処理プログラムを終了する。
【0053】
なお、上記ステップ100〜ステップ120の処理を繰り返し実行する際には、上記特定免震装置に関し、上記ステップ104において水平ずれ量、装置高さ変動量、フランジ傾き、および温度を記憶する時間間隔が、最後に上記ステップ118の処理によって設定された時間間隔となるように制御する。また、本実施の形態に係る免震装置監視処理プログラムでは、上記ステップ120の処理において適用する予め定められた終了タイミングとして、監視対象とする免震装置12の監視を終了する日時として予め定められた日時に達したタイミングを適用しているが、これに限らず、例えば、キーボード20E等を介して本免震装置監視処理プログラムの終了を指示する指示入力が行われたタイミングや、二次記憶部20Dの残記憶容量が所定量以下となったタイミング等、他のタイミングを適用することもできることは言うまでもない。
【0054】
以上詳細に説明したように、本実施の形態では、免震装置の水平変位量(本実施の形態では、水平ずれ量)、鉛直変位量(本実施の形態では、装置高さ変動量およびフランジ傾き)、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる。
【0055】
また、本実施の形態では、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御しているので、免震装置が異常に変形したことを容易に把握することができる。
【0056】
さらに、本実施の形態では、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御しているので、計測情報を記憶するための記憶容量を節約することができる。
【0057】
[第2の実施の形態]
本第2の実施の形態では、水平ずれ量、装置高さ変動量、およびフランジ傾きを予測する場合の形態例について説明する。なお、本第2の実施の形態に係る免震装置監視システム10の構成は、上記第1の実施の形態に係る免震装置監視システム10(図1〜図5参照。)と同一であるので、ここでの説明は省略する。
【0058】
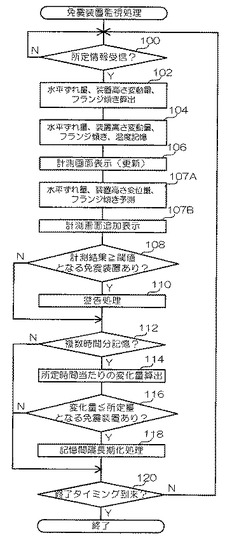
次に、本第2の実施の形態に係る免震装置監視システム10の作用として、図10を参照して、免震装置監視処理を実行する際の本第2の実施の形態に係る監視装置20の作用を説明する。なお、図10は、キーボード20Eを介して実行する旨の指示入力が行われた際に監視装置20のCPU20Aによって実行される、本第2の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートであり、当該プログラムは二次記憶部20Dのプログラム領域PGに予め記憶されている。また、図10における図8と同一の処理を実行するステップについては図8と同一のステップ番号を付し、ここでの説明を省略する。
【0059】
ステップ107Aでは、上記ステップ104の処理によって管理情報データベースDB2に記憶した水平ずれ量、装置高さ変動量、およびフランジ傾きと、それまでに管理情報データベースDB2に記憶した少なくとも1組の水平ずれ量、装置高さ変動量、およびフランジ傾きとを用いて、それ以降の水平ずれ量、装置高さ変動量、およびフランジ傾きを予測する。なお、本ステップ107Aによる水平ずれ量、装置高さ変動量、およびフランジ傾きの予測は、過去の複数時点の情報を用いた従来既知の予測手法を用いて行うことができるため、ここでの詳細な説明は省略する。
【0060】
そして、次のステップ107Bにて、上記ステップ107Aの処理によって予測した水平ずれ量、装置高さ変動量、およびフランジ傾きの少なくとも1つを、上記ステップ106の処理によってディスプレイ20Fに表示されている画面に追加表示するように制御する。
【0061】
以上詳細に説明したように、本第2の実施の形態では、記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測し、予測した前記変形状態情報を前記表示手段によりさらに表示するように制御しているので、免震装置の異常な変形に起因する不具合の発生を未然に防止することができる。
【0062】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。発明の要旨を逸脱しない範囲で上記実施の形態に多様な変更または改良を加えることができ、当該変更または改良を加えた形態も本発明の技術的範囲に含まれる。
【0063】
また、上記の実施の形態は、クレーム(請求項)にかかる発明を限定するものではなく、また実施の形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。前述した実施の形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜の組み合わせにより種々の発明を抽出できる。実施の形態に示される全構成要件から幾つかの構成要件が削除されても、効果が得られる限りにおいて、この幾つかの構成要件が削除された構成が発明として抽出され得る。
【0064】
例えば、上記各実施の形態では、ポテンショメータを用いて水平変位量および鉛直変位量を計測する場合について説明したが、本発明はこれに限定されるものではなく、例えば、光学式距離センサ、機械式距離センサ等の他の変位量を計測可能なセンサを用いる形態としてもよい。この場合も、上記各実施の形態と同様の効果を奏することができる。
【0065】
また、上記各実施の形態では、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より低くするように制御する場合について説明したが、本発明はこれに限定されるものではなく、例えば、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶を停止するように制御する形態としてもよい。この場合、計測情報を記憶するための記憶容量を、より節約することができる。
【0066】
また、上記各実施の形態では、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より低くするように制御する場合について説明したが、本発明はこれに限定されるものではなく、上記所定時間当たりの変化量が予め定められた量より大きな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より高くするように制御する形態としてもよい。
【0067】
また、上記各実施の形態では、中継器18、集約装置50、および送信装置60により、無線通信によって各計測情報を転送する場合について説明したが、本発明はこれに限定されるものではなく、これらの装置の少なくとも1つにおいて有線通信により各計測情報を転送する形態としてもよい。
【0068】
その他、上記各実施の形態で説明した免震装置監視システム10の構成(図1〜図5参照。)は一例であり、本発明の主旨を逸脱しない範囲内において、不要な構成要素を削除したり、新たな構成要素を追加したりすることができることは言うまでもない。
【0069】
また、上記各実施の形態で示した免震装置監視処理プログラムの処理の流れ(図8,図10参照。)も一例であり、本発明の主旨を逸脱しない範囲内において、不要な処理ステップを削除したり、新たな処理ステップを追加したり、処理ステップの順序を入れ替えたりすることができることは言うまでもない。
【0070】
さらに、上記各実施の形態で示した各種データベースの構成(図6,図7参照。)も一例であり、本発明の主旨を逸脱しない範囲内において、一部の情報を削除したり、新たな情報を追加したり、記憶位置を入れ替えたりすることができることは言うまでもない。
【符号の説明】
【0071】
10 免震装置監視システム
12 免震装置
14 水平変位計測送信装置(第1計測送信装置)
16 鉛直変位計測送信装置(第2計測送信装置)
18 中継器(第3計測送信装置)
20 監視装置
20A CPU(制御手段,予測手段)
20D 二次記憶部(記憶手段)
20E キーボード
20F ディスプレイ(表示手段)
20G 無線通信部(受信手段)
50 集約装置
60 送信装置
DB1 初期設定情報データベース
DB2 管理情報データベース
【技術分野】
【0001】
本発明は、免震装置監視システムに関する。
【背景技術】
【0002】
従来、信頼性の高い健全性評価を簡易かつ小型の装置で行うことができる建築物の疲労損傷監視装置を提供することを目的として、特許文献1には、疲労損傷の評価対象となる建築物に取り付けられる装置であって、前記建築物の変位を測定する変位測定手段と、前記建築物の疲労損傷値を記憶する記憶手段と、前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段と、を備えることを特徴とする建築物の疲労損傷監視装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−78370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年、地震動による建築物の揺れを抑制することを目的として、建築物の底部に免震層を設け、当該免震層内に2次元状に複数の免震装置を設ける免震建物が採用されるようになってきており、免震建物に設けられた免震装置の変形量を評価するシステムが要望されている。
【0005】
ここで、免震装置においては、経時的な変形量が設置位置における温度に大きく依存するため、当該温度は極めて重要なパラメータとなるが、上記特許文献1に開示されている技術では、温度に関しては何ら考慮されていないため、免震装置の健全性を高精度で評価することができない、という問題点があった。
【0006】
また、上記特許文献1に開示されている技術は、常時監視するものとはなっていないため、予期せぬ免震装置の異常の発生を把握することが困難である、という問題点もあった。
【0007】
本発明は上記問題点を解決するためになされたものであり、高精度で予期せぬ免震装置の異常の発生を把握することのできる免震装置監視システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、請求項1記載の免震装置監視システムは、同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量を予め定められた時間間隔で計測して送信する第1計測送信装置と、少なくとも1つの前記免震装置の鉛直変位量を前記時間間隔で計測して送信する第2計測送信装置と、少なくとも1つの前記免震装置の温度を前記時間間隔で計測して送信する第3計測送信装置と、前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度を受信する受信手段と、前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度を時系列順で記憶する記憶手段と、前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示手段により表示するように制御する制御手段と、を備えている。
【0009】
請求項1記載の免震装置監視システムによれば、第1計測送信装置により、同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量が予め定められた時間間隔で計測されて送信され、第2計測送信装置により、少なくとも1つの前記免震装置の鉛直変位量が前記時間間隔で計測されて送信され、さらに第3計測送信装置により、少なくとも1つの前記免震装置の温度が前記時間間隔で計測されて送信される。
【0010】
ここで、本発明では、受信手段により、前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度が受信され、記憶手段により、前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度が時系列順で記憶される。なお、上記記憶手段には、RAM(Random Access Memory)、ROM(Read Only Memory)、EEPROM(Electrically Erasable and Programmable Read Only Memory)、フラッシュEEPROM(Flash EEPROM)等の半導体記憶素子、フレキシブル・ディスク等の可搬記録媒体やハードディスク等の固定記録媒体、或いはネットワークに接続されたサーバ・コンピュータ等に設けられた外部記憶装置が含まれる。
【0011】
そして、本発明では、制御手段により、前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報が表示手段により表示されるように制御される。なお、上記表示手段による表示には、画像表示装置による可視表示の他、画像形成装置による永久可視表示、および音声発生装置による可聴表示が含まれる。
【0012】
このように、請求項1記載の免震装置監視システムによれば、免震装置の水平変位量、鉛直変位量、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる。
【0013】
なお、本発明は、請求項2に記載の発明のように、前記制御手段が、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御してもよい。これにより、免震装置が異常に変形したことを容易に把握することができる。
【0014】
また、本発明は、請求項3に記載の発明のように、前記記憶手段に記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測する予測手段をさらに備え、前記制御手段が、前記予測手段によって予測された前記変形状態情報を前記表示手段によりさらに表示するように制御してもよい。これにより、免震装置の異常な変形に起因する不具合の発生を未然に防止することができる。
【0015】
また、本発明は、請求項4に記載の発明のように、前記制御手段が、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段による記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御してもよい。これにより、計測情報を記憶するための記憶容量を節約することができる。
【0016】
特に、請求項4に記載の発明は、請求項5に記載の発明のように、前記制御手段が、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段への記憶を停止するように制御してもよい。これにより、計測情報を記憶するための記憶容量を、より節約することができる。
【発明の効果】
【0017】
本発明によれば、免震装置の水平変位量、鉛直変位量、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる、という効果が得られる。
【図面の簡単な説明】
【0018】
【図1】実施の形態に係る免震装置監視システムの全体構成を示す平面図(一部模式図)である。
【図2】実施の形態に係る免震装置監視システムの部分構成および通信系統を示すブロック図である。
【図3】実施の形態に係る免震装置監視システムの各センサの設置位置、および計測対象とする水平ずれ量、装置高さ変動量、フランジ傾きの説明に供する平面図および側面図である。
【図4】実施の形態に係る監視装置の電気的な要部構成を示すブロック図である。
【図5】実施の形態に係る監視装置に備えられた二次記憶部の主な記憶内容を示す模式図である。
【図6】実施の形態に係る初期設定情報データベースの構成を示す模式図である。
【図7】実施の形態に係る管理情報データベースの構成を示す模式図である。
【図8】第1の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートである。
【図9】実施の形態に係るモニタリング画面の表示状態の一例を示す概略図である。
【図10】第2の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、図面を参照して、本発明を実施するための形態について詳細に説明する。
【0020】
[第1の実施の形態]
まず、図1および図2を参照して、本発明が適用された免震装置監視システム10の構成を説明する。
【0021】
図1に示すように、本実施の形態に係る免震装置監視システム10は、当該システム10の中心的な役割を担う監視装置20と、当該システム10において監視対象としている免震建物における免震層70に2次元状に設けられた複数の免震装置12の少なくとも1つに設けられ、設けられている免震装置12の水平方向に対する変位量(以下、「水平変位量」という。)を計測して無線通信により送信する水平変位計測送信装置14と、当該複数の免震装置12の少なくとも1つに設けられ、設けられている免震装置12の鉛直方向に対する変位量(以下、「鉛直変位量」という。)を計測して無線通信により送信する鉛直変位計測送信装置16と、を有している。
【0022】
また、本実施の形態に係る免震装置監視システム10は、免震層70の予め定められた位置に設けられた少なくとも1つの中継器18を有している。なお、本実施の形態に係る中継器18は、設けられている位置の温度を計測する機能と、水平変位計測送信装置14から送信された水平変位量、鉛直変位計測送信装置16から送信された鉛直変位量、他の中継器18から送信された水平変位量、鉛直変位量、および温度を無線通信により受信する機能と、受信した水平変位量、鉛直変位量、温度と、自身が計測した温度とを無線通信により送信する機能と、を有している。
【0023】
なお、本実施の形態に係る水平変位計測送信装置14および鉛直変位計測送信装置16は、自身が計測した情報を、計測対象とする免震装置12および計測対象とする部位を示す情報(以下、「変位計測位置特定情報」という。)に関連付けて送信する。一方、本実施の形態に係る中継器18は、水平変位計測送信装置14、鉛直変位計測送信装置16、および他の中継器18から受信した情報を送信(転送)すると共に、自身が計測した温度を、自身が設けられている位置を示す情報(以下、「温度計測位置特定情報」という。)に関連付けて送信する。
【0024】
さらに、本実施の形態に係る免震装置監視システム10は、中継器18から送信された情報を受信する集約装置50と、集約装置50によって受信された情報を監視装置20に無線通信により送信(転送)する送信装置60と、を有している。
【0025】
図1に示すように、本実施の形態に係る免震装置監視システム10では、免震建物の水平方向に対する全体的な変形を把握しやすくするために、水平変位計測送信装置14を周辺部に位置される免震装置12と中間部に位置される免震装置12に対して分散して設けている。また、本実施の形態に係る免震装置監視システム10では、鉛直変位計測送信装置16を、免震建物における柱の間隔が相対的に広い領域等の鉛直方向に対する変形が生じやすい領域に位置される免震装置12に対して設けている。
【0026】
また、本実施の形態に係る免震装置監視システム10では、一例として図2に模式的に示すように、複数の中継器18が、最終的に全ての計測情報(水平変位量、鉛直変位量、温度)と、それらに関連付けた変位計測位置特定情報および温度計測位置特定情報とを集約装置50に転送可能な位置に分散して設けられている。
【0027】
図2および図3(A)に示すように、本実施の形態に係る水平変位計測送信装置14は、免震装置12の上部フランジにおける予め定められた複数の位置(図3(A)に示す例では、上部フランジの外周部における互いに1/4周離れた位置の2箇所)に設けられ、設けられている位置の水平変位量を計測するセンサ(本実施の形態では、ポテンショメータ)20Aと、センサ20Aにより計測された水平変位量を最寄りの中継器18に対して無線通信により送信する送信機20Bと、を備えている。
【0028】
また、図2および図3(B)に示すように、本実施の形態に係る鉛直変位計測送信装置16は、免震装置12の上部フランジにおける予め定められた複数の位置(図3(B)に示す例では、上部フランジの外周部における各々1/4周ずつ離れた位置の4箇所)に設けられ、設けられている位置の鉛直変位量を計測するセンサ(本実施の形態では、ポテンショメータ)20Cと、センサ20Cにより計測された鉛直変位量を最寄りの中継器18に対して無線通信により送信する送信機20Dと、を備えている。
【0029】
さらに、図2に示すように、本実施の形態に係る中継器18は、自身が設けられている位置の温度を計測するセンサ(本実施の形態では、サーミスタ)18Aを備えている。
【0030】
なお、本実施の形態に係る免震装置監視システム10では、予め定められた時間間隔(本実施の形態では1時間であり、以下、「単位時間間隔」という。)で、水平変位計測送信装置14および鉛直変位計測送信装置16から計測した情報等が送信される結果、集約装置50において集約(受信)された各種情報は単位時間間隔で送信装置60から監視装置20に送信される。
【0031】
次に、図4を参照して、本免震装置監視システム10において特に重要な役割を有する監視装置20の電気系の要部構成を説明する。
【0032】
同図に示すように、本実施の形態に係る監視装置20は、監視装置20全体の動作を司るCPU(中央処理装置)20Aと、CPU20Aによる各種処理プログラムの実行時のワークエリア等として用いられるRAM20Bと、各種制御プログラムや各種パラメータ等が予め記憶されたROM20Cと、各種情報を記憶するために用いられる記憶手段としての二次記憶部(ここでは、ハードディスク装置)20Dと、各種情報を入力するために用いられるキーボード20Eと、各種情報を表示するために用いられるディスプレイ20Fと、送信装置60との間での無線通信動作を制御する無線通信部20Gと、が備えられており、これら各部はシステムバスBUSにより電気的に相互に接続されている。
【0033】
従って、CPU20Aは、RAM20B、ROM20C、および二次記憶部20Dに対するアクセス、キーボード20Eを介した各種入力情報の取得、ディスプレイ20Fに対する各種情報の表示、および無線通信部20Gを介した送信装置60との間の各種情報の授受を各々行うことができる。
【0034】
一方、図5には、監視装置20に備えられた二次記憶部20Dの主な記憶内容が模式的に示されている。
【0035】
同図に示すように、二次記憶部20Dには、各種データベースを記憶するためのデータベース領域DBと、各種アプリケーション・プログラム等を記憶するためのプログラム領域PGと、が設けられている。
【0036】
また、データベース領域DBには、初期設定情報データベースDB1および管理情報データベースDB2が含まれる。以下、各データベースの構成について詳細に説明する。
【0037】
本実施の形態に係る初期設定情報データベースDB1は、図6に模式的に示すように、識別情報、設置位置、設計情報、初期計測値、および閾値の各情報が記憶されるように構成されている。
【0038】
なお、上記識別情報は、水平変位計測送信装置14または鉛直変位計測送信装置16が設けられている免震装置12を個別に特定するための情報であり、上記設置位置は、対応する免震装置12の免震層70における設置位置を特定するための情報である。なお、本実施の形態に係る免震装置監視システム10では、免震層70の平面視における予め定められた位置(本実施の形態では、図1における左上角部)を原点としたX−Y座標系により免震装置12の設置位置を規定するようにしており、前述した変位計測位置特定情報および温度計測位置特定情報も同一のX−Y座標系により規定するようにしている。
【0039】
また、上記設計情報は、対応する免震装置12のフランジ径、積層ゴムの総厚等といった設計仕様を示す情報であり、上記初期計測値は、対応する免震装置12に設けられている水平変位計測送信装置14により計測される水平変位量の基準となる位置の初期設置時点における実測値と、鉛直変位計測送信装置16のセンサ20Cの配設位置における上部フランジの高さの初期設置時点における実測値を示す情報である。なお、図6におけるH1〜H2は、対応する免震装置12の上部フランジに設けられた2つのセンサ20Aの各々に対応する上記基準となる位置の実測値であり、V1〜V4は、対応する免震装置12の上部フランジに設けられた4つのセンサ20Cの各々に対応する上記上部フランジの高さの実測値である。
【0040】
さらに、上記閾値は、対応する免震装置12の上部フランジの水平方向のずれ量(以下、「水平ずれ量」という。)、対応する免震装置12の上部フランジの高さの変動量(以下、「装置高さ変動量」という。)、および対応する免震装置12の上部フランジの傾き(以下、「フランジ傾き」という。)の各々の上限値を示す情報である。
【0041】
一方、管理情報データベースDB2は、図7に模式的に示すように、識別情報、日時、水平ずれ量、装置高さ変動量、フランジ傾き、および温度の各情報が記憶されるように構成されている。
【0042】
なお、上記識別情報は、初期設定情報データベースDB1の識別情報と同一の情報であり、上記日時は、計測日時を示す情報である。また、上記水平ずれ量は、対応する免震装置12について、対応する日時に計測された水平ずれ量を示す情報であり、上記装置高さ変動量は、対応する免震装置12について、対応する日時に計測された装置高さ変動量を示す情報であり、上記フランジ傾きは、対応する免震装置12について、対応する日時に計測されたフランジ傾きを示す情報であり、上記温度は、対応する免震装置12の最寄りの中継器18のセンサ18Aによって対応する日時に計測された温度を示す情報である。
【0043】
次に、本実施の形態に係る免震装置監視システム10の作用として、図8を参照して、免震装置監視処理を実行する際の監視装置20の作用を説明する。なお、図8は、キーボード20Eを介して実行する旨の指示入力が行われた際に監視装置20のCPU20Aによって実行される免震装置監視処理プログラムの処理の流れを示すフローチャートであり、当該プログラムは二次記憶部20Dのプログラム領域PGに予め記憶されている。また、ここでは、錯綜を回避するために、初期設定情報データベースDB1が予め構築されている場合について説明する。
【0044】
同図のステップ100では、送信装置60からの水平変位量、鉛直変位量、および温度の各計測情報と、それらに関連付けた変位計測位置特定情報および温度計測位置特定情報との受信待ちを行い、次のステップ102では、初期設定情報データベースDB1から全ての初期計測値を読み出し、読み出した初期計測値と、受信した情報とに基づいて、水平変位計測送信装置14または鉛直変位計測送信装置16が設けられた免震装置12における水平ずれ量、装置高さ変動量、およびフランジ傾きを算出する。
【0045】
次のステップ104では、上記ステップ102の処理によって算出した水平ずれ量、装置高さ変動量、およびフランジ傾きと、上記ステップ100の処理によって受信した温度とを、この時点の日時を示す情報と共に管理情報データベースDB2の対応する領域に記憶(登録)する。
【0046】
次のステップ106では、上記ステップ104の処理によって管理情報データベースDB2に記憶した温度と、水平ずれ量、装置高さ変動量、およびフランジ傾きの少なくとも1つとを、ディスプレイ20Fにより時系列で連続的に表示するように制御する。なお、図10には、本ステップ106の処理によって温度および水平ずれ量をディスプレイ20Fにより表示した場合の表示画面の一例が示されている。
【0047】
次のステップ108では、初期設定情報データベースDB1から全ての閾値を読み出し、上記ステップ104の処理によって管理情報データベースDB2に記憶した水平ずれ量、装置高さ変動量、およびフランジ傾きに、対応する閾値以上となる免震装置12が存在するか否かを判定し、否定判定となった場合は後述するステップ112に移行する一方、肯定判定となった場合にはステップ110に移行する。
【0048】
ステップ110では、予め定められた警告処理を実行し、その後にステップ112に移行する。なお、本実施の形態に係る免震装置監視処理プログラムでは、上記ステップ110において実行される警告処理として、監視装置20に内蔵された図示しないスピーカを予め定められた期間(本実施の形態では、1分間)だけ鳴動させる処理を適用しているが、これに限らず、ディスプレイ20Fにより警告する情報を表示する処理、監視装置20にプリンタを接続しておき、当該プリンタにより警告する情報を印刷する処理、LAN(Local Area Network)、インターネット等の通信回線を介して外部装置と接続し、当該外部装置に対して警告する情報を送信する処理等の各種処理を単独、または組み合わせて適用する形態としてもよい。
【0049】
ステップ112では、管理情報データベースDB2に水平ずれ量、装置高さ変動量、フランジ傾き、および温度を複数時間分記憶したか否かを判定し、否定判定となった場合は後述するステップ120に移行する一方、肯定判定となった場合にはステップ114に移行する。
【0050】
ステップ114では、この時点における直近の上記単位時間間隔(本実施の形態では、1時間)当たりの水平ずれ量、装置高さ変動量、およびフランジ傾きの変化量を算出し、次のステップ116にて、算出した変化量が、各々の変化量に対応して予め定められた量以下となる免震装置12(以下、「特定免震装置」という。)が存在するか否かを判定して、否定判定となった場合は後述するステップ120に移行する一方、肯定判定となった場合にはステップ118に移行する。なお、上記ステップ116の処理において適用する予め定められた量は、対応する変化量が当該量以下となった場合に、当該変化量が小さいため、以降の計測情報の記憶の頻度を低下させるようにするためのものであり、免震装置監視システム10の用途や要求される監視レベル等に応じて、ユーザによって予め設定された値を適用することができる。
【0051】
ステップ118では、上記特定免震装置に関して、上記ステップ104の処理によって管理情報データベースDB2に各種計測情報を記憶する時間間隔を、それまでより長くする(本実施の形態では、それまでの2倍の時間間隔)ように設定し、その後にステップ120に移行する。
【0052】
ステップ120では、予め定められた終了タイミングが到来したか否かを判定し、否定判定となった場合は上記ステップ100に戻る一方、肯定判定となった場合には、本免震装置監視処理プログラムを終了する。
【0053】
なお、上記ステップ100〜ステップ120の処理を繰り返し実行する際には、上記特定免震装置に関し、上記ステップ104において水平ずれ量、装置高さ変動量、フランジ傾き、および温度を記憶する時間間隔が、最後に上記ステップ118の処理によって設定された時間間隔となるように制御する。また、本実施の形態に係る免震装置監視処理プログラムでは、上記ステップ120の処理において適用する予め定められた終了タイミングとして、監視対象とする免震装置12の監視を終了する日時として予め定められた日時に達したタイミングを適用しているが、これに限らず、例えば、キーボード20E等を介して本免震装置監視処理プログラムの終了を指示する指示入力が行われたタイミングや、二次記憶部20Dの残記憶容量が所定量以下となったタイミング等、他のタイミングを適用することもできることは言うまでもない。
【0054】
以上詳細に説明したように、本実施の形態では、免震装置の水平変位量(本実施の形態では、水平ずれ量)、鉛直変位量(本実施の形態では、装置高さ変動量およびフランジ傾き)、および温度を予め定められた時間間隔毎に時系列順で連続的に記憶すると共に、当該水平変位量、鉛直変位量、および温度に基づいて免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示しているので、高精度で予期せぬ免震装置の異常の発生を把握することができる。
【0055】
また、本実施の形態では、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御しているので、免震装置が異常に変形したことを容易に把握することができる。
【0056】
さらに、本実施の形態では、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御しているので、計測情報を記憶するための記憶容量を節約することができる。
【0057】
[第2の実施の形態]
本第2の実施の形態では、水平ずれ量、装置高さ変動量、およびフランジ傾きを予測する場合の形態例について説明する。なお、本第2の実施の形態に係る免震装置監視システム10の構成は、上記第1の実施の形態に係る免震装置監視システム10(図1〜図5参照。)と同一であるので、ここでの説明は省略する。
【0058】
次に、本第2の実施の形態に係る免震装置監視システム10の作用として、図10を参照して、免震装置監視処理を実行する際の本第2の実施の形態に係る監視装置20の作用を説明する。なお、図10は、キーボード20Eを介して実行する旨の指示入力が行われた際に監視装置20のCPU20Aによって実行される、本第2の実施の形態に係る免震装置監視処理プログラムの処理の流れを示すフローチャートであり、当該プログラムは二次記憶部20Dのプログラム領域PGに予め記憶されている。また、図10における図8と同一の処理を実行するステップについては図8と同一のステップ番号を付し、ここでの説明を省略する。
【0059】
ステップ107Aでは、上記ステップ104の処理によって管理情報データベースDB2に記憶した水平ずれ量、装置高さ変動量、およびフランジ傾きと、それまでに管理情報データベースDB2に記憶した少なくとも1組の水平ずれ量、装置高さ変動量、およびフランジ傾きとを用いて、それ以降の水平ずれ量、装置高さ変動量、およびフランジ傾きを予測する。なお、本ステップ107Aによる水平ずれ量、装置高さ変動量、およびフランジ傾きの予測は、過去の複数時点の情報を用いた従来既知の予測手法を用いて行うことができるため、ここでの詳細な説明は省略する。
【0060】
そして、次のステップ107Bにて、上記ステップ107Aの処理によって予測した水平ずれ量、装置高さ変動量、およびフランジ傾きの少なくとも1つを、上記ステップ106の処理によってディスプレイ20Fに表示されている画面に追加表示するように制御する。
【0061】
以上詳細に説明したように、本第2の実施の形態では、記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測し、予測した前記変形状態情報を前記表示手段によりさらに表示するように制御しているので、免震装置の異常な変形に起因する不具合の発生を未然に防止することができる。
【0062】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。発明の要旨を逸脱しない範囲で上記実施の形態に多様な変更または改良を加えることができ、当該変更または改良を加えた形態も本発明の技術的範囲に含まれる。
【0063】
また、上記の実施の形態は、クレーム(請求項)にかかる発明を限定するものではなく、また実施の形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。前述した実施の形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜の組み合わせにより種々の発明を抽出できる。実施の形態に示される全構成要件から幾つかの構成要件が削除されても、効果が得られる限りにおいて、この幾つかの構成要件が削除された構成が発明として抽出され得る。
【0064】
例えば、上記各実施の形態では、ポテンショメータを用いて水平変位量および鉛直変位量を計測する場合について説明したが、本発明はこれに限定されるものではなく、例えば、光学式距離センサ、機械式距離センサ等の他の変位量を計測可能なセンサを用いる形態としてもよい。この場合も、上記各実施の形態と同様の効果を奏することができる。
【0065】
また、上記各実施の形態では、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より低くするように制御する場合について説明したが、本発明はこれに限定されるものではなく、例えば、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶を停止するように制御する形態としてもよい。この場合、計測情報を記憶するための記憶容量を、より節約することができる。
【0066】
また、上記各実施の形態では、水平ずれ量、装置高さ変動量、フランジ傾きの所定時間当たりの変化量が予め定められた量より小さな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より低くするように制御する場合について説明したが、本発明はこれに限定されるものではなく、上記所定時間当たりの変化量が予め定められた量より大きな免震装置に対して計測された水平ずれ量、装置高さ変動量、フランジ傾きの記憶頻度を、他の免震装置に対する記憶頻度より高くするように制御する形態としてもよい。
【0067】
また、上記各実施の形態では、中継器18、集約装置50、および送信装置60により、無線通信によって各計測情報を転送する場合について説明したが、本発明はこれに限定されるものではなく、これらの装置の少なくとも1つにおいて有線通信により各計測情報を転送する形態としてもよい。
【0068】
その他、上記各実施の形態で説明した免震装置監視システム10の構成(図1〜図5参照。)は一例であり、本発明の主旨を逸脱しない範囲内において、不要な構成要素を削除したり、新たな構成要素を追加したりすることができることは言うまでもない。
【0069】
また、上記各実施の形態で示した免震装置監視処理プログラムの処理の流れ(図8,図10参照。)も一例であり、本発明の主旨を逸脱しない範囲内において、不要な処理ステップを削除したり、新たな処理ステップを追加したり、処理ステップの順序を入れ替えたりすることができることは言うまでもない。
【0070】
さらに、上記各実施の形態で示した各種データベースの構成(図6,図7参照。)も一例であり、本発明の主旨を逸脱しない範囲内において、一部の情報を削除したり、新たな情報を追加したり、記憶位置を入れ替えたりすることができることは言うまでもない。
【符号の説明】
【0071】
10 免震装置監視システム
12 免震装置
14 水平変位計測送信装置(第1計測送信装置)
16 鉛直変位計測送信装置(第2計測送信装置)
18 中継器(第3計測送信装置)
20 監視装置
20A CPU(制御手段,予測手段)
20D 二次記憶部(記憶手段)
20E キーボード
20F ディスプレイ(表示手段)
20G 無線通信部(受信手段)
50 集約装置
60 送信装置
DB1 初期設定情報データベース
DB2 管理情報データベース
【特許請求の範囲】
【請求項1】
同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量を予め定められた時間間隔で計測して送信する第1計測送信装置と、
少なくとも1つの前記免震装置の鉛直変位量を前記時間間隔で計測して送信する第2計測送信装置と、
少なくとも1つの前記免震装置の温度を前記時間間隔で計測して送信する第3計測送信装置と、
前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度を受信する受信手段と、
前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度を時系列順で記憶する記憶手段と、
前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示手段により表示するように制御する制御手段と、
を備えた免震装置監視システム。
【請求項2】
前記制御手段は、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御する
請求項1記載の免震装置監視システム。
【請求項3】
前記記憶手段に記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測する予測手段をさらに備え、
前記制御手段は、前記予測手段によって予測された前記変形状態情報を前記表示手段によりさらに表示するように制御する
請求項1または請求項2記載の免震装置監視システム。
【請求項4】
前記制御手段は、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段による記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御する
請求項1から請求項3の何れか1項記載の免震装置監視システム。
【請求項5】
前記制御手段は、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段への記憶を停止するように制御する
請求項4記載の免震装置監視システム。
【請求項1】
同一の免震層内に2次元状に設けられた複数の免震装置における少なくとも1つの前記免震装置の水平変位量を予め定められた時間間隔で計測して送信する第1計測送信装置と、
少なくとも1つの前記免震装置の鉛直変位量を前記時間間隔で計測して送信する第2計測送信装置と、
少なくとも1つの前記免震装置の温度を前記時間間隔で計測して送信する第3計測送信装置と、
前記第1計測送信装置から送信された前記水平変位量、前記第2計測送信装置から送信された前記鉛直変位量、および前記第3計測送信装置から送信された前記温度を受信する受信手段と、
前記受信手段によって受信された前記水平変位量、前記鉛直変位量、および前記温度を時系列順で記憶する記憶手段と、
前記記憶手段に記憶された前記水平変位量、前記鉛直変位量、および前記温度に基づいて前記免震装置の時間経過に伴う変形の状態を示す変形状態情報を表示手段により表示するように制御する制御手段と、
を備えた免震装置監視システム。
【請求項2】
前記制御手段は、前記変形状態情報により示される変形の度合いが予め定められた度合い以上となっている前記免震装置が存在する場合に警告を発するように制御する
請求項1記載の免震装置監視システム。
【請求項3】
前記記憶手段に記憶された互いに異なる複数の時間における前記水平変位量、前記鉛直変位量、および前記温度に基づいて以降の前記変形状態情報を予測する予測手段をさらに備え、
前記制御手段は、前記予測手段によって予測された前記変形状態情報を前記表示手段によりさらに表示するように制御する
請求項1または請求項2記載の免震装置監視システム。
【請求項4】
前記制御手段は、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段による記憶頻度を、他の前記免震装置に対する記憶頻度より低くするように制御する
請求項1から請求項3の何れか1項記載の免震装置監視システム。
【請求項5】
前記制御手段は、前記変形状態情報により示される所定時間あたりの変形の度合いが予め定められた度合いより小さな前記免震装置に対して計測された前記水平変位量、前記鉛直変位量、および前記温度の前記記憶手段への記憶を停止するように制御する
請求項4記載の免震装置監視システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−137339(P2012−137339A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−288765(P2010−288765)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
[ Back to top ]