
入出力装置及び制御システム
【課題】システムの省線化を図ると共に、制御装置における処理負荷は軽減しつつも、制御システム全体におけるデータの授受の効率化及び高速化を図ることができる入出力装置、及び該入出力装置を含む制御システムを提供する。
【解決手段】センサ1b,1f,1jからのデータがECU3bにて同時に受信されることが望ましい場合、センサ1b,1f,1jからデータを夫々入力してCANバス7へ送信するIOU5a,5c,5dは、相互にデータが送信された時点を検知して、当該データが送信された時点と、自身が送信するデータの送信時点の時間差が短縮されるように、送信タイミングを調整する。他のセンサ1dからのデータを送信するIOU5bは、センサ1b,1f,1jからのデータの送信時点との時間差が延長されるように送信タイミングを調整する。
【解決手段】センサ1b,1f,1jからのデータがECU3bにて同時に受信されることが望ましい場合、センサ1b,1f,1jからデータを夫々入力してCANバス7へ送信するIOU5a,5c,5dは、相互にデータが送信された時点を検知して、当該データが送信された時点と、自身が送信するデータの送信時点の時間差が短縮されるように、送信タイミングを調整する。他のセンサ1dからのデータを送信するIOU5bは、センサ1b,1f,1jからのデータの送信時点との時間差が延長されるように送信タイミングを調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の機器と、該複数の機器からの情報を使用して機器の制御を行なう制御装置との間で前記複数の機器の制御装置に対する入出力を中継する入出力装置に関する。特に、各機器から入力されるデータの出力タイミングを特定のデータとほぼ同時となるようにするか、又は異ならせることにより、データを受信して用いる制御装置における処理負荷の軽減、及びシステム内におけるデータの授受の効率化を図ることができる入出力装置、及び該入出力装置を含む制御システムに関する。
【背景技術】
【0002】
近年では、多数の機器を制御して、全体として多様な機能を実現させる制御システムが普及している。機器には夫々制御装置が接続され、更に各制御装置に通信手段を設けて相互にデータを交換させ、個々の制御装置が独立した制御を行なうのではなく、他の制御装置などを介して得られるデータに基づいて自身に対応する制御対象の機器を制御するなど、連携して制御を実行する制御システムが各分野で利用されている。
【0003】
このような制御システムでは、機能の増加に伴い、制御対象の機器の数も増加すると共に、制御に用いるデータを取得、又は測定するセンサなどの機器の数も増加する。
【0004】
特に車両の分野では、各種機能に対応するアクチュエータ又はセンサなどの機器が多数車内に配され、各機器を制御する制御装置としてECU(Electronic Control Unit)が各々に対応して配されて動作している。車両の制御は機械的制御から電気的制御へ移行しつつあり、更に、制御システムによって実現される機能の特化、実現できる機能の増加及び多様化が進んでいる。これにより、車両に搭載されるアクチュエータ、センサなどの機器が増加している。
【0005】
このように、制御対象の機器、又は制御に用いるデータを取得するセンサなどの機器の数は増大する。機器の数が増大した場合、各機器に各々制御装置が対応する構成では、制御装置の数も増大して相互の通信における通信負荷が重くなるなどの事態が考えられる。この場合、データの送受信の遅れの発生の問題、又は、ほぼ同時に受信されるべき内容のデータであるにも拘らず、少なからず受信に時間差が生じるなどの問題が生じる。
【0006】
一方、車両におけるECUを利用した制御システムでは、以下のような問題からセンサ、アクチュエータなどの機器との間の入出力を集約する構成が提案されている(特許文献1、2などを参照)。ECUの数は上述のように増大しており、且つ1つの通信線に接続されるECUの数がリンギング防止などの問題から限られるから、通信線の数が増加する。更に各機器の数の増大に応じて信号線の数も増加する。車両の分野では特に、燃費の改善及び環境への影響を考慮して車両全体の軽量が重要な課題となっている。軽量化には通信線、信号線、電源線などの各種電線を含むワイヤハーネスの軽量化が大きく影響するので、各種電線自体の軽量化及び省線化が望まれている。
【0007】
そこで特許文献1では、入出力装置が各機器から得たデータを多重化して制御装置である車載ECUへ伝送する構成とすることにより、省線化を図っている。特許文献2には、通信により多重化したデータを送信する構成を、シフトレジスタを用いて出力する構成とすることにより、ECUの部品点数を削減して小型化できる入出力装置が提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−95659号公報
【特許文献2】特開2008−296871号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1、2に開示されているように、複数の機器から出力されたデータに対する演算を共通の演算手段で行ない、更に情報を多重化してECUへ通信により伝送するか、又はシフトレジスタを介して出力する構成により、通信線、信号線の削減を図ることができる。
【0010】
特許文献1、2に開示されている構成では、センサなどから得られたデータをまとめて出力することができる。しかしながら、センサ又はアクチュエータからデータが出力されるタイミングは任意である。特許文献1、2に開示されている入出力装置では、任意のタイミングで得られるデータを出力するタイミングを、これらのデータを用いるECUからの要求に応じて適宜調整することは考慮されていない。
【0011】
本発明は斯かる事情に鑑みてなされたものであり、制御システムを構成する複数の機器と各機器の制御装置との間でデータの入出力を処理する入出力装置が、データを制御装置へ通信手段により送信するに際し、送信するタイミングを、特定のデータとほぼ同時となるようにするか、又は異ならせることによって制御装置における処理負荷の軽減、及びシステム内におけるデータの授受の効率化を図ることができる入出力装置、及び該入出力装置を含む制御システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
第1発明に係る入出力装置は、データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置とに接続され、前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置において、特定のデータが制御装置又は他の入出力装置から送信される時点を検知する検知手段と、該手段が検知した時点、及び、自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータの送信時点を調整する調整手段とを備えることを特徴とする。
【0013】
第2発明に係る入出力装置は、予め複数のグループに分けられたデータの識別情報、及び各グループに1つずつ前記特定のデータとして設定されるデータの識別情報を、グループ毎に記憶する手段を備え、前記調整手段は、自身が送信するデータと同一のグループの特定のデータが送信された時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が短縮されるように、次のデータ送信時点を調整するようにしてあることを特徴とする。
【0014】
第3発明に係る入出力装置は、前記調整手段は、自身が送信するデータが特定のデータであり、該特定のデータと異なるグループの特定のデータの送信時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が延長されるように、次のデータ送信時点を調整するようにしてあることを特徴とする。
【0015】
第4発明に係る入出力装置は、各データには属性が対応付けられており、前記グループは、同一属性が対応付けられているデータが同一グループとなるように分けられていることを特徴とする。
【0016】
第5発明に係る入出力装置は、各グループ内の送信周期が短いデータが前記特定のデータとして設定されていることを特徴とする。
【0017】
第6発明に係る入出力装置は、各グループは、送信周期が特定のデータの送信周期の倍数であるデータからなるように分けられていることを特徴とする。
【0018】
第7発明に係る入出力装置は、各データには、優先順位が付与されており、各グループ内の優先順位が高いデータが前記特定のデータとして設定されていることを特徴とする。
【0019】
第8発明に係る制御システムは、データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置と、前記複数の機器及び前記複数の制御装置に接続されて前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置とを含み、前記複数の制御装置及び前記入出力装置は通信線にバス型に接続され、前記複数の制御装置は前記入出力装置を介して複数の機器を制御するようにしてある制御システムにおいて、前記入出力装置は、特定のデータが制御装置又は他の入出力装置から前記通信線に送信される時点を検知する検知手段と、該手段が検知した時点、及び、前記通信手段により自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータ送信時点を調整する調整手段とを備えることを特徴とする。
【0020】
第1発明及び第8発明では、複数の機器及び機器を制御する制御装置との間の入出力を処理する入出力装置にて、通信により機器からのデータを制御装置へ周期的に送信するようにしてあり、当該データが送信されるタイミングは、他の入出力装置又は制御装置から送信される特定のデータが送信される時点を基準に調整される。あるデータは、特定のデータが送信される周期の各時点との時間差が短縮されるようなタイミングで以後送信され、特定のデータとほぼ同時に制御装置、又は他の入出力装置で受信可能となる。また、他のあるデータは特定のデータが送信される周期の各時点との時間差が延長されるようなタイミングで以後送信されるから、特定のデータが送信されるタイミングとは離隔されたタイミングで制御装置又は他の入出力装置で受信される。
【0021】
第2発明では、第1発明において、複数の機器及び制御装置間で入出力されるデータは、予め複数のグループに分けられており、各グループに1つのデータが特定のデータとして設定され、同一のグループのデータは、当該グループ内の特定のデータの送信時点との時間差が短縮するように送信時点が調整される。これにより、関連性が高い同一のグループのデータはほぼ同時に制御装置、又は他の入出力装置で受信することが可能となる。
【0022】
第3発明では、第2発明において、特定のデータの送信の際には、他のグループの特定のデータの送信時点との時間差が延長するように調整される。これにより、各グループの特定のデータ間は、相互にデータの送信時点が離隔される。同一のグループのデータの送信時点は当該グループの特定のデータとほぼ同時となるように調整されるから、各グループの特定のデータの送信時点が離隔されることにより、特定のデータ間に限らず異なるグループのデータ間では送信時点は異なる。
【0023】
第4発明では、データの属性により、同一属性のデータが同一グループとなる。属性とは、例えば、当該データに基づき制御される制御対象の機器の系統などである。これにより、同一属性のデータが、制御装置又は他の入出力装置にてほぼ同時に受信され、異なる属性のデータが受信されるタイミングは離隔される。同一属性のデータは同時に制御に用いられることが推測されるところ、これらを制御装置にてほぼ同時に受信でき、更にそのときに他の属性のデータにより妨げられず効率的である。
【0024】
第5発明では、各グループ内の送信周期が短いデータが特定のデータとして設定される。これにより、同一グループ内での特定のデータの送信時点に送信タイミングを合わせる処理が簡易となり効率的となる。
【0025】
第6発明では、各グループのデータは送信周期が相互に倍数の関係にある。したがって、同一グループ内での特定のデータの送信時点に送信タイミングを合わせる処理が簡易となる。特定のデータとの送信タイミングとのずれが一定であり、一旦タイミングを合わせた後は、安定にほぼ同一タイミングに送信されるようになるので、処理が効率的となる。
【0026】
第7発明では、各グループ内の優先順位が高いデータが前記特定のデータとして設定される。優先順位が高いデータ同士が特定のデータ同士として送信タイミングが相互に離隔されるので、優先順位が高いデータが衝突することがなく、データの授受が効率的となる。
【発明の効果】
【0027】
本発明による場合、アクチュエータ、センサなどの各機器と、センサから出力されるデータに基づいてアクチュエータに制御データを与えて制御する制御装置とを含む制御システムで、各機器と制御装置との間の入出力が入出力装置に集約されるので、通信線、信号線等を削減することができ、システムの省線化を図ることができる。
【0028】
更に、複数の入出力装置にて、グループに分けられたデータがグループ毎に制御装置で受信されるように相互にデータ送信タイミングを調整する。したがって、制御装置は制御に共に用いる関連性が高いデータをほぼ同時に取得して処理を行なうことができてデータの授受が効率的である。つまり、データの同時性が向上し、制御装置における制御の精度も向上する。また、異なるグループのデータ同士は送受信タイミングがずらされるから、制御装置と入出力装置とが接続される通信線での通信効率も向上し、高速化が図られる。
【0029】
本発明における制御装置では、任意のタイミングで夫々出力される同一グループのデータを、全て受信できるまで当該データを用いた制御を待機するなどの処理が必要ないから、制御装置における処理負荷を軽減させることも可能である。
【図面の簡単な説明】
【0030】
【図1】本実施の形態における車載制御システムの構成を示す構成図である。
【図2】本実施の形態の車載制御システムのCANバスへの各装置の接続を簡略化して示すブロック図である。
【図3】本実施の形態におけるIOUの内部構成を示すブロック図である。
【図4】本実施の形態における各データのID、用途、送信周期などの内容例を示す説明図である。
【図5】本実施の形態におけるIOUの記憶部に記憶されるグループ分けの情報の内容例を示す説明図である。
【図6】本実施の形態におけるIOUによる送信タイミングの調整処理の概要を示す説明図である。
【図7】本実施の形態におけるIOUによる送信タイミングの調整処理の結果の具体例を模式的に示す説明図である。
【発明を実施するための形態】
【0031】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。なお、以下に示す実施の形態では、車両に搭載されている多数のアクチュエータ、センサ及びECUを含む車載制御システムに本発明に係る入出力装置を用いた例を挙げて説明する。
【0032】
図1は、本実施の形態における車載制御システムの構成を示す構成図である。車載制御システムは、車両の前部に搭載された温度センサ若しくはカメラ、タイヤの軸に取り付けられる車輪速センサ、又はヨーレートセンサなどの各種センサ1a,1b,1c,1d,1e,1f,1g,1h,1i,1jと、ブレーキ、ヘッドライト、ドアロックなどの各種アクチュエータ2a,2b,…と、各種センサ1a,1b,…から得られるデータに基づいてアクチュエータ2a,2b,…の動作を制御するECU3a,3bと、異なるネットワーク間のデータの授受を中継するGW(Gate Way)4とを含み、更に、各種センサ1a,1b,…及びアクチュエータ2a,2b,…と、ECU3a,3bとの間の入出力を処理するIOU(In-Out Unit:入出力ユニット)5a,5b,5c,5dとを含む。
【0033】
各種センサ1a,1b,…及びアクチュエータ2a,2b,…は夫々、信号線6,6,…によりIOU5a,5b,…に接続されている。センサ1a,1b,…及びアクチュエータ2a,2b,…はIOU5a,5b,5c,5dに夫々、LIN(Local Interconnect Network)により通信が可能な構成としてもよい。
【0034】
ECU3a,3b、GW4、及びIOU5a,5b,5c,5dは夫々、CAN(Controller Area Network)バス7に接続されており、相互に制御用のデータを送受信する。本実施の形態ではECU3a,3b、GW4、及びIOU5a,5b,5c,5d間の通信のプロトコルはCANとするが、これに限らず他のイベントドリブン型の通信プロトコルでもよい。
【0035】
IOU5a,5b,…には夫々、車両内で近傍に配置されているセンサ1a,1b,…とアクチュエータ2a,2b,…とが接続されている。いずれのセンサ1a,1b,…及びアクチュエータ2a,2b,…を同一のIOU5a(又はIOU5b,5c,5d)に接続するかは、物理的距離に基づいて設計されている。図1に示す例では、車両前部の左部分の3つのセンサ1a,1b,1cと、1つのアクチュエータ2aとが近くに配されているので1台のIOU5aに接続されている。また、車両前部中央に配されているセンサ1c,1dも、同一のIOU5bに接続されている。車両前部の右部分の3つのセンサ1e,1f,1gと、1つのアクチュエータ2bとが同一のIOU5cに接続され、車両後部の2つのセンサ1i,1jと、2つのアクチュエータ2c,2dとが同一のIOU5dに接続されている。センサ1a,1b,…及びアクチュエータ2a,2b,…が、ECU3a,3bに各々接続される構成でなく、近傍に配置されるIOU5a,5b,…に接続されて、IOU5a,5b,…によりECUとの間の入出力が集約されることで、信号線6,6,…の長さも比較的短くて済む点、省線化に効果的である。特に、車両前部の左部分及び右部分などは、センサ1a,1b,…などの機器の数が多く、省線化の効果が顕著に現れる。
【0036】
しかしながら、IOU5aに接続されているセンサ1a,1b,1cで検知された測定値などの情報を含むデータが、同一のIOU5aに接続されるアクチュエータ2aの動作の制御に用いられるとは限らない。上述したように、センサ1a,1b,1c及びアクチュエータ2aは、物理的配置に基づいてIOU5aに接続されているために、機能的には離れている可能性があるからである。例えば、IOU5cに接続された車両前部に設置されているアクチュエータ2bの動作をECU3bの処理により制御するため、車両前部に設置されているセンサ1b及びセンサ1hから得られるデータのみならず、車両の後部に搭載されているセンサ1jにて得られる測定値などのデータをも用いる場合がある。この場合、センサ1b,1h,1jからのデータは、ECU3bにて同時に受信できることが望ましい。
【0037】
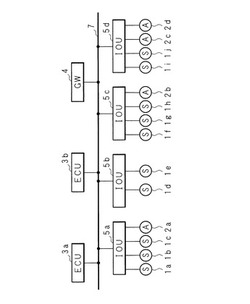
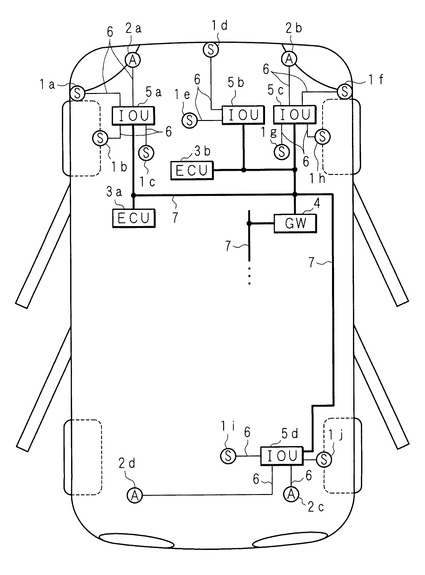
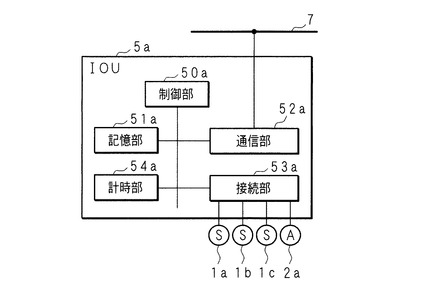
図2は、本実施の形態の車載制御システムのCANバス7への各装置の接続を簡略化して示すブロック図である。センサ1a,1b,…からのセンサが検知した測定値などの情報、及びアクチュエータ2a,2b,…からの制御状態を示す情報は、各々から周期的に出力されるようにしてある。そして、IOU5a,5b,5cも、各センサ1a,1b,…からデータ、又はアクチュエータ2a,2b,…からのデータを周期的にCANバス7へ送信する。GW4も、他のCANバス7からを介して図示しない他のセンサから出力された測定値などのデータを周期的にCANバス7へ送信するようにしてある。これにより、各アクチュエータ2a,2b,…を制御するECU3a,3bでは、常時的に最新の内容のデータを取得することができる。
【0038】
このように、各IOU5a,5b,5c,5dからデータが周期的に送信されるに際し、上述の例のように、センサ1b,1h,1jからのデータは、ECU3bにて同時に受信できることが望ましい。また、他のセンサ1a,1c,…からのデータについても同様に、例えば各センサ1a,1c,…からのデータの用途がボディ系の制御なのか、制御系の制御なのかなどにより同時に受信されるべきデータがある。
【0039】
本実施の形態では、センサ1a,1b,…及びアクチュエータ2a,2b,…が、ボディ系(B)と制御系(C)との2系統に区別されるとする。説明を簡易とするために2系統のみに注目する。そして、ECU3aがボディ系のアクチュエータ2a,2bの動作を制御し、ECU3bが制御系のアクチュエータ2c,2dの動作を制御する。このとき、センサ1a,1d,1fはボディ系、センサ1b,1c,1e,1g,1h,1i,1jは制御系であるとする。この場合、ボディ系のセンサ1a,1d,…からのデータはECU3aで用いられ、制御系のセンサ1b,1c,…からのデータはECU3bで用いられる。
【0040】
このように、各IOU5a,5b,5c,5dには物理的配置関係に基づいて各センサ1a,1b,…が接続されているから、異なる系統のセンサ1a,1b,…が接続される。例えば、同時にデータが受信できることが望ましいデータ元のセンサ1b,1h,1jは、異なるIOU5a,5c,5dに夫々接続されているので、まとめて1つのCANフレームにて送信することはできない。
【0041】
そこで、実施の形態1におけるIOU5a,5b,…は、センサ1a,1b,…及びアクチュエータ2a,2b,…とECU3a,3bとの間の入出力を物理的に集約して省線化を実現するのみならず、IOU5a,5b,…からデータが出力されるタイミングを、制御に同時に用いられるような関連性が高いデータがほぼ同時に、近接して送信されるように調整して出力する。
【0042】
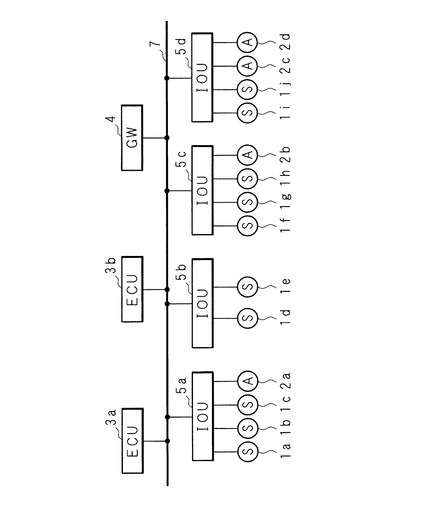
IOU5a,5b,…にてこのような機能を実現させるための構成について説明する。図3は、実施の形態1におけるIOU5aの内部構成を示すブロック図である。IOU5bの内部構成は、IOU5aの内部構成と同様であるから説明を省略する。
【0043】
IOU5aはマイクロコンピュータを用いて構成され、制御部50aと、記憶部51aと、通信部52aと、接続部53aと、計時部54aとを備える。IOU5a,5bはASIC(Application Specific Integrated Circuit:特定用途集積回路)で構成されてもよい。
【0044】
制御部50aは、CPU(Central Processing Unit)などを用いて図示しない車両のバッテリー、オルタネータ等の電力供給装置から電力の供給を受けて各構成部の動作を制御するようにしてある。
【0045】
記憶部51aは、フラッシュメモリなどの不揮発性メモリを用いる。記憶部51aには、制御部50aに、後述するデータの送信タイミングの調整処理を実現させるコンピュータプログラム、又は制御部50aが処理の際に参照する各種情報が記憶されている。なお、記憶部51aには、接続されているセンサ1a,1b,1cから出力されたデータ、制御対象であるアクチュエータ2a,2bの動作状態などを示すデータ、ECU3a,3b、GW4、又は他のIOU5b,5c,5dからのアクチュエータ2a,2bの制御用のデータが記憶されてもよい。これらのセンサ1a,1b,1c、ECU3a,3b、又はGW4などからのデータは、記憶部51aとは異なるSRAM(Static Random Access Memory)、DRAM(Dynamic Random Access Memory)等のランダムアクセスメモリを用いた記憶部に別途記憶する構成としてもよい。
【0046】
通信部52aは、CANバス7を介した通信を実現するためのCANトランシーバ、及びCANコントローラの機能を有する。詳細には、CANバス7における通信を制御する。通信部52aは、後述するように制御部50aからデータが与えられた場合、当該データをCANプロトコルの信号(CANフレーム)に載せ、CANトランシーバにて物理層における信号の送信を実現する。また、通信部52aは、CANバス7にてECU3a,3b、GW4、及び他のIOU5b,5c,5dから送信されたデータ、データの送信要求などのCANフレームを受信した場合、データ又は送信要求を抽出して制御部50aへ通知する。これにより、制御部50aは、各データがCANバス7へ送信される時点を認識することが可能である。
【0047】
接続部53aはIOU5aのインタフェースであり、センサ1a,1b,1c及びアクチュエータ2aが信号線6,6,…を介して接続されている。接続部53aは、センサ1a,1b,1c及びアクチュエータ2aが信号線6,6,…からの信号を制御部50aへ通知し、制御部50aから指示されたデータの信号をセンサ1a,1b,1c又はアクチュエータ2aのいずれかへ出力する。D/A変換、A/D変換機能を有してもよい。
【0048】
計時部54aは、所定の周波数にてパルス信号を出力するクロック回路を用い、パルスを計数することにより時間の経過を測定する。制御部50aは、計時部54aから任意のタイミングで時間情報を取得することが可能である。
【0049】
このように構成されるIOU5a,5b,…が、センサ1a,1b,1cから出力されるデータをCANバス7へ送信する際に、送信タイミングを調整する処理について以下に説明する。
【0050】
まず、IOU5a,5b,…が送信するデータは、接続されるセンサ1a,1b,…及びアクチュエータ2a,2b,…によって設計段階で設定されている。各IOU5a,5b,…は基本的に夫々、自身が送信するデータの識別情報(ID)、送信周期を記憶部51a,…に記憶しておき、送信周期を計時部54a,…により計時して、送信周期に従って送信する。
【0051】
図4は、本実施の形態における各データのID、用途、送信周期などの内容例を示す説明図である。ECU3a,3b、GW4、及びIOU5a,5b,…間で送受信されるデータには、CANプロトコルに準じて「CAN ID」が割り当てられている。なお、本実施の形態1における通信では、複数のデータがまとめられて送信される。例えば、IOU5aには、制御系のセンサ1b,1cが接続されている。IOU5aは、制御系のセンサ1b,1cからのデータをまとめて1のCANフレームにて送信する。この場合、データの組み合わせに応じて「CAN ID」が割り当てられる。データを受信するECU3a,3bなどでCANフレームに含まれるデータが何のデータであるかを認識することができるからである。以下、夫々の「CAN ID」は同一のCANフレームに含まれるデータの組み合わせで割り当てられているとする。
【0052】
図4には、本実施の形態におけるIOU5a,5b,5c,5dから送信されるデータ(フレーム)の識別情報(CAN ID)、各フレームの優先順位、データの属性としてデータの用途である系統、及び各データの送信周期(msec)が優先順位にて示されている。
【0053】
図4の例では、「001」、「010」などの「CAN ID」が割り当てられている。図4の例では、「CAN ID」は11ビットで表わされ、例えば「001」は「(0)000 0000 0001」を、「010」は「(0)000 0001 0000」を16進数で表している。CANプロトコルでは、「CAN ID」を数値として解釈した場合に数値が小さいほど優先順位が高い。つまり、図4の説明図では「CAN ID」が「001」のフレームが最も優先順位が上である。図4には、優先順位を数字で表わしている。
【0054】
また、図4に示すように、各フレームは属性としてボディ系(B)か制御系(C)かの系統に分けられており、各組み合わせに含まれるデータが用いられる用途を示す。更に、各IOU5a,5b,5c,5dは、各フレームを予め規定された送信周期で送信する。図4に示すように、各フレームには予め規定された送信周期が付与されている。
【0055】
各IOU5a,5b,…は、自身が送信するデータの「CAN ID」、送信周期の情報を記憶部51a,…に記憶しておく。例えば、IOU5aは、センサ1aからのボディ系のデータ及びセンサ1b,1cからの制御系のデータを含むフレームを送信するが、夫々の「CAN ID」は「020」及び「001」である。本実施の形態では、IOU5bは「CAN ID」が「050」及び「200」であるフレームを送信し、IOU5cは「CAN ID」が「010」及び「100」であるフレームを送信し、IOU5dは「150」であるフレームを送信する。
【0056】
このようにIOU5a,5b,…から送信されるフレームは、上述のように同一の系統などの関連性が高いデータがほぼ同時にそれらのデータを用いるECU3a,3bに夫々受信されるように送信タイミングが調整されることが望ましい。
【0057】
本実施の形態では、送信タイミングの調整のために、各フレームは含まれるデータの用途(系統)、送信周期又は優先順位によりグループ分けされる。そして、IOU5a,5b,…は、フレームのグループ分けの情報を記憶部51a,…に記憶しておき、各フレームがいずれのグループに属するかを制御部50a,…が認識できるようにしてある。更に、各フレームのデータには、送信タイミングの調整の基準となる特定のフレームが1つ、マスタとして設定されており、いずれのフレームがマスタであるかを示す情報が記憶部51a,…に記憶される。これにより、各IOU5a,5b,…の制御部50a,…は、いずれのフレームが同一のグループで、各グループのいずれのフレームがマスタであるかを記憶部51a,…を参照して認識し、処理を行なう。
【0058】
図5は、本実施の形態におけるIOU5aの記憶部51aに記憶されるグループ分けの情報の内容例を示す説明図である。なお図5に示す例は、図4に示した各フレームを分類した例である。
【0059】
図5に示す例では、各フレームはグループ(1)〜(4)に分類されており、グループ(1)には「CAN ID」が「010」、「150」及び「050」であるフレーム、グループ(2)には「CAN ID」が「001」であるフレームが1つ、グループ(3)には「CAN ID」が「100」及び「020」であるフレーム、グループ(4)には「CAN ID」が「200」であるフレームが属している。図5中に示されるマスタの数字は、マスタとしての優先順位を示す。優先順位が最も高いフレームがIOU5a,5b,…の故障などにより送信されない状況となった場合には、各IOU5a,5b,…は自身が送信するフレームが属するグループ内で次にマスタとしての優先順位が高いフレームをマスタとして認識して処理を行なう。
【0060】
図5に示す各グループ(1)〜(4)への分類は以下のように行なう。まず系統にて分類する。図4の内容例を参照すれば、ボディ系(B)のグループとして「CAN ID」が夫々「020」及び「100」であるフレームが分類され、制御系(C)のグループとして「CAN ID」が夫々「001」、「010」、「050」及び「150」であるフレームが分類される。なお、ボディ系及び制御系のいずれにも送信されるデータを含むフレームである「CAN ID」が「200」であるフレームは、別のグループに分類される。
【0061】
次に、各系統のグループに分類されたフレームについて、夫々のグループ内で最も送信周期が短いフレームを仮マスタとして定義する。ボディ系のグループでは、送信周期が「40(msec)」である「CAN ID」が「100」であるフレームが仮マスタとして定義される。制御系のグループでは送信周期が「20(msec)」である「CAN ID」が「010」(又は「150」)であるフレームが仮マスタとして定義される。その他のグループでは所属しているフレームは1つなので「CAN ID」が「200」であるフレームが仮マスタとして定義される。
【0062】
次に、各グループに分類されたフレームについて、仮マスタに定義されたフレームの送信周期のN倍(N=1,2,…;1以上の整数)の関係にないフレームを別のグループに分類する。上述のボディ系のグループでは、「CAN ID」が「100」であるフレームの送信周期は、仮マスタの送信周期は「40(msec)」の5倍である「200(msec)」であるからそのまま同一グループとされる。制御系のグループでは、仮マスタの送信周期は「20(msec)」であるが、「CAN ID」が「001」であるフレームの送信周期は「50(msec)」であってN倍でないので、別のグループに分類され、それ自身が仮マスタとして定義される。
【0063】
このようにして分類を行ない、仮マスタとして定義されたフレームをマスタとして設定する。上述の分類過程でいずれのグループにも属さないフレームが存在する場合、当該フレームは新たなグループとして分類され、それ自身が仮マスタとなる。
【0064】
なお、制御系のグループでは、最も送信周期が短いフレームが複数ある。このような場合、フレームの優先順位がより高いフレームを最終的に親フレームとする。この場合、「CAN ID」が「010」であるフレームがマスタとして定義される。これにより、図5に示したようなグループへの分類が実現される。
【0065】
IOU5a,5b,…は、このように分類されたフレームのグループ分けの情報を記憶部51a,…に記憶しておき、同一グループに属するフレームは、マスタのフレームの送信タイミングに近づけるように、マスタのフレーム同士は相互に送信タイミングが離れるように、即ち時間差が延長されるように送信タイミングの調整を行ない合う。
【0066】
図6は、本実施の形態におけるIOU5a,5b,…による送信タイミングの調整処理の概要を示す説明図である。図6の上部には、マスタのフレームと、当該フレームと同一グループに属する他のフレームとの送信タイミングの関係を示す図を示す。図6の下部には、マスタのフレームと同一グループに属する他のフレーム夫々について、フレームの送信時点とマスタのフレームの送信時点との時間差に応じた、マスタの送信タイミングへ近づける力(F)の大きさを示すグラフを示す。
【0067】
本実施の形態における各IOU5a,5b,…による送信タイミングの調整は、図6に示すようにマスタのフレームの送信タイミングとの関係で調整する。IOU5a,5b,…は、自身が送信するフレームと同一グループに属するマスタのフレームの送信時点に対する自身が送信するフレームの送信時点からの時間差(=マスタの送信時点−自身の送信するフレームの送信時点)により以下の式(1)で求められる力F分を、次の送信タイミングに足して送信する。なお、式(1)中、rは時間差、G及びgは所定の定数である。
【0068】
【数1】

【0069】
これにより、IOU5a,5b,…は、自身が送信するフレームの送信時点が、マスタのフレームの送信時点よりも前である場合(図6上部の左側矢印)、力Fは正の値となるから、次の送信タイミングでは力F分だけプラスされ、遅らされる。逆に、自身が送信するフレームの送信時点が、マスタのフレームの送信時点よりも後である場合(図6上部の右側矢印)、力Fは負の値となるから、次の送信タイミングでは力F分だけマイナスされ、早められる。実施の形態1では、マスタのフレームの送信時点との時間差が極めて大きい場合には、それほど力Fは強く働かないが、所定の時間差である場合に最も強くタイミングが近づけられる。
【0070】
このように、マスタのフレームと同一グループに属する他のフレームを送信するIOU5a,5b,…は、マスタのフレームの送信時点との時間差から求められる力Fの大きさに応じた時間分だけ、次の送信タイミングを早めるか、又は遅らせることによって、マスタのフレームの送信タイミングとの時間差を短縮する。
【0071】
例えば、IOU5cから、グループ(1)のマスタである「010」のフレームが送信された場合、「050」のフレームを送信するIOU5b、及び「150」のフレームを送信するIOU5dの制御部は、マスタのフレームの送信時点を通信部からの通知により認識する。そして夫々の制御部は、自身が夫々フレーム送信しようとしている(送信済みである場合は送信した)時点との時間差を算出し、時間差に応じて、次の送信タイミングを早めるか、又は遅らせることで、時間差を短縮する。
【0072】
図7は、本実施の形態におけるIOU5a,5b,…による送信タイミングの調整処理の結果の具体例を模式的に示す説明図である。図7(a)は調整処理前、図7(b)は調整処理後の各フレームの送信時点の時間分布を示している。図7(a)及び(b)では、横軸に時間軸をとり、各フレームの送信時点を矢印にて示している。なお、時間軸の上側にマスタのフレームの送信時点、下側にマスタ以外のフレームの送信時点を示している。
【0073】
図7(a)に示す例では、「CAN ID」が「010」であるフレーム(ハッチングの矢印)は、「20(msec)」で周期的に複数回送信されている。「150」及び「050」のフレームは、「010」のフレームと同一グループに属するにも拘わらず、これらのフレームの送信タイミングは、他のグループに属する「200」のフレーム、「020」のフレーム、又は「001」のフレームとの送信タイミングと近接している。同様に、「020」のフレームは「CAN ID」が「100」であるフレームと同一グループであるにも拘わらず、その送信タイミングは離隔しており、他のグループのフレームのと近接している。
【0074】
これに対し、図7(b)では、マスタのフレームである「010」、「001」、「100」及び「200」のメッセージ間は、相互に送信タイミングが離れるように送信タイミングの調整が行なわれる。これにより、送信時点の時間差が略均一となっている。
【0075】
また、「CAN ID」が夫々「150」及び「050」であるフレームの送信タイミングは、IOU5b,5dの制御部の処理によって同一グループ(2)のマスタである「010」のフレームの送信タイミングに近づけられており、同一グループのフレームが近接して受信されるように調整されている。また、「CAN ID」が「020」であるフレームは、マスタのメッセージ「100」の送信タイミングに近づけられている。
【0076】
このようにして、各IOU5a,5b,…の処理により、ECU3a,3b、及びGW4へ送信すべきデータを含むフレームの送信タイミングが、各ECU3a,3bで必要なデータがまとめて受信されるように調整される。例えば、同一のグループに属して関連性が高い「CAN ID」が「010」、「150」及び「050」である制御系のデータを含むフレームは、図7(b)に示すようにCANバス7にほぼ同時に送信される。したがって、当該データを用いてアクチュエータ2の制御データを生成するECU3bは、これらを含むフレームをほぼ同時に受信することができる。このようにデータの同時性が高まってECU3a,3bにおける処理負荷も軽減され、車載制御システム全体におけるデータの授受が効率化される。
【0077】
図7(b)に示したように、各IOU5a,5b,…から送信されるフレームは、グループ毎にまとめて送信され、異なるグループのデータ同士は、送受信タイミングがずらされ、ほぼ均等な間隔で送信されるように安定化される。CANバス7では、1つのノードのみ送信が可能であるから送信タイミングが集中した場合に輻輳が起こり、優先順位が低いフレームの送信が滞るなどの問題が発生する。図7(b)に示したように、各フレームが効率よく送信されるからCANバス7における通信効率も向上する。通信効率の向上により、フレームが滞ることがないので、GW4経由の他のフレームについても遅延が発生することもなく、車載制御システム全体におけるフレーム即ちデータの授受の高速化も図られるなど、優れた効果を奏する。
【0078】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0079】
1a,1b,1c,1d,1e,1f,1g,1h,1i,1j センサ(機器)
2a,2b,2c,2d アクチュエータ(機器)
3a,3b ECU(制御装置)
5a,5b,5c,5d IOU(入出力装置)
50a 制御部(調整手段)
51a 記憶部
52a 通信部(通信手段)
53a 計時部(検知手段)
【技術分野】
【0001】
本発明は、複数の機器と、該複数の機器からの情報を使用して機器の制御を行なう制御装置との間で前記複数の機器の制御装置に対する入出力を中継する入出力装置に関する。特に、各機器から入力されるデータの出力タイミングを特定のデータとほぼ同時となるようにするか、又は異ならせることにより、データを受信して用いる制御装置における処理負荷の軽減、及びシステム内におけるデータの授受の効率化を図ることができる入出力装置、及び該入出力装置を含む制御システムに関する。
【背景技術】
【0002】
近年では、多数の機器を制御して、全体として多様な機能を実現させる制御システムが普及している。機器には夫々制御装置が接続され、更に各制御装置に通信手段を設けて相互にデータを交換させ、個々の制御装置が独立した制御を行なうのではなく、他の制御装置などを介して得られるデータに基づいて自身に対応する制御対象の機器を制御するなど、連携して制御を実行する制御システムが各分野で利用されている。
【0003】
このような制御システムでは、機能の増加に伴い、制御対象の機器の数も増加すると共に、制御に用いるデータを取得、又は測定するセンサなどの機器の数も増加する。
【0004】
特に車両の分野では、各種機能に対応するアクチュエータ又はセンサなどの機器が多数車内に配され、各機器を制御する制御装置としてECU(Electronic Control Unit)が各々に対応して配されて動作している。車両の制御は機械的制御から電気的制御へ移行しつつあり、更に、制御システムによって実現される機能の特化、実現できる機能の増加及び多様化が進んでいる。これにより、車両に搭載されるアクチュエータ、センサなどの機器が増加している。
【0005】
このように、制御対象の機器、又は制御に用いるデータを取得するセンサなどの機器の数は増大する。機器の数が増大した場合、各機器に各々制御装置が対応する構成では、制御装置の数も増大して相互の通信における通信負荷が重くなるなどの事態が考えられる。この場合、データの送受信の遅れの発生の問題、又は、ほぼ同時に受信されるべき内容のデータであるにも拘らず、少なからず受信に時間差が生じるなどの問題が生じる。
【0006】
一方、車両におけるECUを利用した制御システムでは、以下のような問題からセンサ、アクチュエータなどの機器との間の入出力を集約する構成が提案されている(特許文献1、2などを参照)。ECUの数は上述のように増大しており、且つ1つの通信線に接続されるECUの数がリンギング防止などの問題から限られるから、通信線の数が増加する。更に各機器の数の増大に応じて信号線の数も増加する。車両の分野では特に、燃費の改善及び環境への影響を考慮して車両全体の軽量が重要な課題となっている。軽量化には通信線、信号線、電源線などの各種電線を含むワイヤハーネスの軽量化が大きく影響するので、各種電線自体の軽量化及び省線化が望まれている。
【0007】
そこで特許文献1では、入出力装置が各機器から得たデータを多重化して制御装置である車載ECUへ伝送する構成とすることにより、省線化を図っている。特許文献2には、通信により多重化したデータを送信する構成を、シフトレジスタを用いて出力する構成とすることにより、ECUの部品点数を削減して小型化できる入出力装置が提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−95659号公報
【特許文献2】特開2008−296871号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1、2に開示されているように、複数の機器から出力されたデータに対する演算を共通の演算手段で行ない、更に情報を多重化してECUへ通信により伝送するか、又はシフトレジスタを介して出力する構成により、通信線、信号線の削減を図ることができる。
【0010】
特許文献1、2に開示されている構成では、センサなどから得られたデータをまとめて出力することができる。しかしながら、センサ又はアクチュエータからデータが出力されるタイミングは任意である。特許文献1、2に開示されている入出力装置では、任意のタイミングで得られるデータを出力するタイミングを、これらのデータを用いるECUからの要求に応じて適宜調整することは考慮されていない。
【0011】
本発明は斯かる事情に鑑みてなされたものであり、制御システムを構成する複数の機器と各機器の制御装置との間でデータの入出力を処理する入出力装置が、データを制御装置へ通信手段により送信するに際し、送信するタイミングを、特定のデータとほぼ同時となるようにするか、又は異ならせることによって制御装置における処理負荷の軽減、及びシステム内におけるデータの授受の効率化を図ることができる入出力装置、及び該入出力装置を含む制御システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
第1発明に係る入出力装置は、データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置とに接続され、前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置において、特定のデータが制御装置又は他の入出力装置から送信される時点を検知する検知手段と、該手段が検知した時点、及び、自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータの送信時点を調整する調整手段とを備えることを特徴とする。
【0013】
第2発明に係る入出力装置は、予め複数のグループに分けられたデータの識別情報、及び各グループに1つずつ前記特定のデータとして設定されるデータの識別情報を、グループ毎に記憶する手段を備え、前記調整手段は、自身が送信するデータと同一のグループの特定のデータが送信された時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が短縮されるように、次のデータ送信時点を調整するようにしてあることを特徴とする。
【0014】
第3発明に係る入出力装置は、前記調整手段は、自身が送信するデータが特定のデータであり、該特定のデータと異なるグループの特定のデータの送信時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が延長されるように、次のデータ送信時点を調整するようにしてあることを特徴とする。
【0015】
第4発明に係る入出力装置は、各データには属性が対応付けられており、前記グループは、同一属性が対応付けられているデータが同一グループとなるように分けられていることを特徴とする。
【0016】
第5発明に係る入出力装置は、各グループ内の送信周期が短いデータが前記特定のデータとして設定されていることを特徴とする。
【0017】
第6発明に係る入出力装置は、各グループは、送信周期が特定のデータの送信周期の倍数であるデータからなるように分けられていることを特徴とする。
【0018】
第7発明に係る入出力装置は、各データには、優先順位が付与されており、各グループ内の優先順位が高いデータが前記特定のデータとして設定されていることを特徴とする。
【0019】
第8発明に係る制御システムは、データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置と、前記複数の機器及び前記複数の制御装置に接続されて前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置とを含み、前記複数の制御装置及び前記入出力装置は通信線にバス型に接続され、前記複数の制御装置は前記入出力装置を介して複数の機器を制御するようにしてある制御システムにおいて、前記入出力装置は、特定のデータが制御装置又は他の入出力装置から前記通信線に送信される時点を検知する検知手段と、該手段が検知した時点、及び、前記通信手段により自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータ送信時点を調整する調整手段とを備えることを特徴とする。
【0020】
第1発明及び第8発明では、複数の機器及び機器を制御する制御装置との間の入出力を処理する入出力装置にて、通信により機器からのデータを制御装置へ周期的に送信するようにしてあり、当該データが送信されるタイミングは、他の入出力装置又は制御装置から送信される特定のデータが送信される時点を基準に調整される。あるデータは、特定のデータが送信される周期の各時点との時間差が短縮されるようなタイミングで以後送信され、特定のデータとほぼ同時に制御装置、又は他の入出力装置で受信可能となる。また、他のあるデータは特定のデータが送信される周期の各時点との時間差が延長されるようなタイミングで以後送信されるから、特定のデータが送信されるタイミングとは離隔されたタイミングで制御装置又は他の入出力装置で受信される。
【0021】
第2発明では、第1発明において、複数の機器及び制御装置間で入出力されるデータは、予め複数のグループに分けられており、各グループに1つのデータが特定のデータとして設定され、同一のグループのデータは、当該グループ内の特定のデータの送信時点との時間差が短縮するように送信時点が調整される。これにより、関連性が高い同一のグループのデータはほぼ同時に制御装置、又は他の入出力装置で受信することが可能となる。
【0022】
第3発明では、第2発明において、特定のデータの送信の際には、他のグループの特定のデータの送信時点との時間差が延長するように調整される。これにより、各グループの特定のデータ間は、相互にデータの送信時点が離隔される。同一のグループのデータの送信時点は当該グループの特定のデータとほぼ同時となるように調整されるから、各グループの特定のデータの送信時点が離隔されることにより、特定のデータ間に限らず異なるグループのデータ間では送信時点は異なる。
【0023】
第4発明では、データの属性により、同一属性のデータが同一グループとなる。属性とは、例えば、当該データに基づき制御される制御対象の機器の系統などである。これにより、同一属性のデータが、制御装置又は他の入出力装置にてほぼ同時に受信され、異なる属性のデータが受信されるタイミングは離隔される。同一属性のデータは同時に制御に用いられることが推測されるところ、これらを制御装置にてほぼ同時に受信でき、更にそのときに他の属性のデータにより妨げられず効率的である。
【0024】
第5発明では、各グループ内の送信周期が短いデータが特定のデータとして設定される。これにより、同一グループ内での特定のデータの送信時点に送信タイミングを合わせる処理が簡易となり効率的となる。
【0025】
第6発明では、各グループのデータは送信周期が相互に倍数の関係にある。したがって、同一グループ内での特定のデータの送信時点に送信タイミングを合わせる処理が簡易となる。特定のデータとの送信タイミングとのずれが一定であり、一旦タイミングを合わせた後は、安定にほぼ同一タイミングに送信されるようになるので、処理が効率的となる。
【0026】
第7発明では、各グループ内の優先順位が高いデータが前記特定のデータとして設定される。優先順位が高いデータ同士が特定のデータ同士として送信タイミングが相互に離隔されるので、優先順位が高いデータが衝突することがなく、データの授受が効率的となる。
【発明の効果】
【0027】
本発明による場合、アクチュエータ、センサなどの各機器と、センサから出力されるデータに基づいてアクチュエータに制御データを与えて制御する制御装置とを含む制御システムで、各機器と制御装置との間の入出力が入出力装置に集約されるので、通信線、信号線等を削減することができ、システムの省線化を図ることができる。
【0028】
更に、複数の入出力装置にて、グループに分けられたデータがグループ毎に制御装置で受信されるように相互にデータ送信タイミングを調整する。したがって、制御装置は制御に共に用いる関連性が高いデータをほぼ同時に取得して処理を行なうことができてデータの授受が効率的である。つまり、データの同時性が向上し、制御装置における制御の精度も向上する。また、異なるグループのデータ同士は送受信タイミングがずらされるから、制御装置と入出力装置とが接続される通信線での通信効率も向上し、高速化が図られる。
【0029】
本発明における制御装置では、任意のタイミングで夫々出力される同一グループのデータを、全て受信できるまで当該データを用いた制御を待機するなどの処理が必要ないから、制御装置における処理負荷を軽減させることも可能である。
【図面の簡単な説明】
【0030】
【図1】本実施の形態における車載制御システムの構成を示す構成図である。
【図2】本実施の形態の車載制御システムのCANバスへの各装置の接続を簡略化して示すブロック図である。
【図3】本実施の形態におけるIOUの内部構成を示すブロック図である。
【図4】本実施の形態における各データのID、用途、送信周期などの内容例を示す説明図である。
【図5】本実施の形態におけるIOUの記憶部に記憶されるグループ分けの情報の内容例を示す説明図である。
【図6】本実施の形態におけるIOUによる送信タイミングの調整処理の概要を示す説明図である。
【図7】本実施の形態におけるIOUによる送信タイミングの調整処理の結果の具体例を模式的に示す説明図である。
【発明を実施するための形態】
【0031】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。なお、以下に示す実施の形態では、車両に搭載されている多数のアクチュエータ、センサ及びECUを含む車載制御システムに本発明に係る入出力装置を用いた例を挙げて説明する。
【0032】
図1は、本実施の形態における車載制御システムの構成を示す構成図である。車載制御システムは、車両の前部に搭載された温度センサ若しくはカメラ、タイヤの軸に取り付けられる車輪速センサ、又はヨーレートセンサなどの各種センサ1a,1b,1c,1d,1e,1f,1g,1h,1i,1jと、ブレーキ、ヘッドライト、ドアロックなどの各種アクチュエータ2a,2b,…と、各種センサ1a,1b,…から得られるデータに基づいてアクチュエータ2a,2b,…の動作を制御するECU3a,3bと、異なるネットワーク間のデータの授受を中継するGW(Gate Way)4とを含み、更に、各種センサ1a,1b,…及びアクチュエータ2a,2b,…と、ECU3a,3bとの間の入出力を処理するIOU(In-Out Unit:入出力ユニット)5a,5b,5c,5dとを含む。
【0033】
各種センサ1a,1b,…及びアクチュエータ2a,2b,…は夫々、信号線6,6,…によりIOU5a,5b,…に接続されている。センサ1a,1b,…及びアクチュエータ2a,2b,…はIOU5a,5b,5c,5dに夫々、LIN(Local Interconnect Network)により通信が可能な構成としてもよい。
【0034】
ECU3a,3b、GW4、及びIOU5a,5b,5c,5dは夫々、CAN(Controller Area Network)バス7に接続されており、相互に制御用のデータを送受信する。本実施の形態ではECU3a,3b、GW4、及びIOU5a,5b,5c,5d間の通信のプロトコルはCANとするが、これに限らず他のイベントドリブン型の通信プロトコルでもよい。
【0035】
IOU5a,5b,…には夫々、車両内で近傍に配置されているセンサ1a,1b,…とアクチュエータ2a,2b,…とが接続されている。いずれのセンサ1a,1b,…及びアクチュエータ2a,2b,…を同一のIOU5a(又はIOU5b,5c,5d)に接続するかは、物理的距離に基づいて設計されている。図1に示す例では、車両前部の左部分の3つのセンサ1a,1b,1cと、1つのアクチュエータ2aとが近くに配されているので1台のIOU5aに接続されている。また、車両前部中央に配されているセンサ1c,1dも、同一のIOU5bに接続されている。車両前部の右部分の3つのセンサ1e,1f,1gと、1つのアクチュエータ2bとが同一のIOU5cに接続され、車両後部の2つのセンサ1i,1jと、2つのアクチュエータ2c,2dとが同一のIOU5dに接続されている。センサ1a,1b,…及びアクチュエータ2a,2b,…が、ECU3a,3bに各々接続される構成でなく、近傍に配置されるIOU5a,5b,…に接続されて、IOU5a,5b,…によりECUとの間の入出力が集約されることで、信号線6,6,…の長さも比較的短くて済む点、省線化に効果的である。特に、車両前部の左部分及び右部分などは、センサ1a,1b,…などの機器の数が多く、省線化の効果が顕著に現れる。
【0036】
しかしながら、IOU5aに接続されているセンサ1a,1b,1cで検知された測定値などの情報を含むデータが、同一のIOU5aに接続されるアクチュエータ2aの動作の制御に用いられるとは限らない。上述したように、センサ1a,1b,1c及びアクチュエータ2aは、物理的配置に基づいてIOU5aに接続されているために、機能的には離れている可能性があるからである。例えば、IOU5cに接続された車両前部に設置されているアクチュエータ2bの動作をECU3bの処理により制御するため、車両前部に設置されているセンサ1b及びセンサ1hから得られるデータのみならず、車両の後部に搭載されているセンサ1jにて得られる測定値などのデータをも用いる場合がある。この場合、センサ1b,1h,1jからのデータは、ECU3bにて同時に受信できることが望ましい。
【0037】
図2は、本実施の形態の車載制御システムのCANバス7への各装置の接続を簡略化して示すブロック図である。センサ1a,1b,…からのセンサが検知した測定値などの情報、及びアクチュエータ2a,2b,…からの制御状態を示す情報は、各々から周期的に出力されるようにしてある。そして、IOU5a,5b,5cも、各センサ1a,1b,…からデータ、又はアクチュエータ2a,2b,…からのデータを周期的にCANバス7へ送信する。GW4も、他のCANバス7からを介して図示しない他のセンサから出力された測定値などのデータを周期的にCANバス7へ送信するようにしてある。これにより、各アクチュエータ2a,2b,…を制御するECU3a,3bでは、常時的に最新の内容のデータを取得することができる。
【0038】
このように、各IOU5a,5b,5c,5dからデータが周期的に送信されるに際し、上述の例のように、センサ1b,1h,1jからのデータは、ECU3bにて同時に受信できることが望ましい。また、他のセンサ1a,1c,…からのデータについても同様に、例えば各センサ1a,1c,…からのデータの用途がボディ系の制御なのか、制御系の制御なのかなどにより同時に受信されるべきデータがある。
【0039】
本実施の形態では、センサ1a,1b,…及びアクチュエータ2a,2b,…が、ボディ系(B)と制御系(C)との2系統に区別されるとする。説明を簡易とするために2系統のみに注目する。そして、ECU3aがボディ系のアクチュエータ2a,2bの動作を制御し、ECU3bが制御系のアクチュエータ2c,2dの動作を制御する。このとき、センサ1a,1d,1fはボディ系、センサ1b,1c,1e,1g,1h,1i,1jは制御系であるとする。この場合、ボディ系のセンサ1a,1d,…からのデータはECU3aで用いられ、制御系のセンサ1b,1c,…からのデータはECU3bで用いられる。
【0040】
このように、各IOU5a,5b,5c,5dには物理的配置関係に基づいて各センサ1a,1b,…が接続されているから、異なる系統のセンサ1a,1b,…が接続される。例えば、同時にデータが受信できることが望ましいデータ元のセンサ1b,1h,1jは、異なるIOU5a,5c,5dに夫々接続されているので、まとめて1つのCANフレームにて送信することはできない。
【0041】
そこで、実施の形態1におけるIOU5a,5b,…は、センサ1a,1b,…及びアクチュエータ2a,2b,…とECU3a,3bとの間の入出力を物理的に集約して省線化を実現するのみならず、IOU5a,5b,…からデータが出力されるタイミングを、制御に同時に用いられるような関連性が高いデータがほぼ同時に、近接して送信されるように調整して出力する。
【0042】
IOU5a,5b,…にてこのような機能を実現させるための構成について説明する。図3は、実施の形態1におけるIOU5aの内部構成を示すブロック図である。IOU5bの内部構成は、IOU5aの内部構成と同様であるから説明を省略する。
【0043】
IOU5aはマイクロコンピュータを用いて構成され、制御部50aと、記憶部51aと、通信部52aと、接続部53aと、計時部54aとを備える。IOU5a,5bはASIC(Application Specific Integrated Circuit:特定用途集積回路)で構成されてもよい。
【0044】
制御部50aは、CPU(Central Processing Unit)などを用いて図示しない車両のバッテリー、オルタネータ等の電力供給装置から電力の供給を受けて各構成部の動作を制御するようにしてある。
【0045】
記憶部51aは、フラッシュメモリなどの不揮発性メモリを用いる。記憶部51aには、制御部50aに、後述するデータの送信タイミングの調整処理を実現させるコンピュータプログラム、又は制御部50aが処理の際に参照する各種情報が記憶されている。なお、記憶部51aには、接続されているセンサ1a,1b,1cから出力されたデータ、制御対象であるアクチュエータ2a,2bの動作状態などを示すデータ、ECU3a,3b、GW4、又は他のIOU5b,5c,5dからのアクチュエータ2a,2bの制御用のデータが記憶されてもよい。これらのセンサ1a,1b,1c、ECU3a,3b、又はGW4などからのデータは、記憶部51aとは異なるSRAM(Static Random Access Memory)、DRAM(Dynamic Random Access Memory)等のランダムアクセスメモリを用いた記憶部に別途記憶する構成としてもよい。
【0046】
通信部52aは、CANバス7を介した通信を実現するためのCANトランシーバ、及びCANコントローラの機能を有する。詳細には、CANバス7における通信を制御する。通信部52aは、後述するように制御部50aからデータが与えられた場合、当該データをCANプロトコルの信号(CANフレーム)に載せ、CANトランシーバにて物理層における信号の送信を実現する。また、通信部52aは、CANバス7にてECU3a,3b、GW4、及び他のIOU5b,5c,5dから送信されたデータ、データの送信要求などのCANフレームを受信した場合、データ又は送信要求を抽出して制御部50aへ通知する。これにより、制御部50aは、各データがCANバス7へ送信される時点を認識することが可能である。
【0047】
接続部53aはIOU5aのインタフェースであり、センサ1a,1b,1c及びアクチュエータ2aが信号線6,6,…を介して接続されている。接続部53aは、センサ1a,1b,1c及びアクチュエータ2aが信号線6,6,…からの信号を制御部50aへ通知し、制御部50aから指示されたデータの信号をセンサ1a,1b,1c又はアクチュエータ2aのいずれかへ出力する。D/A変換、A/D変換機能を有してもよい。
【0048】
計時部54aは、所定の周波数にてパルス信号を出力するクロック回路を用い、パルスを計数することにより時間の経過を測定する。制御部50aは、計時部54aから任意のタイミングで時間情報を取得することが可能である。
【0049】
このように構成されるIOU5a,5b,…が、センサ1a,1b,1cから出力されるデータをCANバス7へ送信する際に、送信タイミングを調整する処理について以下に説明する。
【0050】
まず、IOU5a,5b,…が送信するデータは、接続されるセンサ1a,1b,…及びアクチュエータ2a,2b,…によって設計段階で設定されている。各IOU5a,5b,…は基本的に夫々、自身が送信するデータの識別情報(ID)、送信周期を記憶部51a,…に記憶しておき、送信周期を計時部54a,…により計時して、送信周期に従って送信する。
【0051】
図4は、本実施の形態における各データのID、用途、送信周期などの内容例を示す説明図である。ECU3a,3b、GW4、及びIOU5a,5b,…間で送受信されるデータには、CANプロトコルに準じて「CAN ID」が割り当てられている。なお、本実施の形態1における通信では、複数のデータがまとめられて送信される。例えば、IOU5aには、制御系のセンサ1b,1cが接続されている。IOU5aは、制御系のセンサ1b,1cからのデータをまとめて1のCANフレームにて送信する。この場合、データの組み合わせに応じて「CAN ID」が割り当てられる。データを受信するECU3a,3bなどでCANフレームに含まれるデータが何のデータであるかを認識することができるからである。以下、夫々の「CAN ID」は同一のCANフレームに含まれるデータの組み合わせで割り当てられているとする。
【0052】
図4には、本実施の形態におけるIOU5a,5b,5c,5dから送信されるデータ(フレーム)の識別情報(CAN ID)、各フレームの優先順位、データの属性としてデータの用途である系統、及び各データの送信周期(msec)が優先順位にて示されている。
【0053】
図4の例では、「001」、「010」などの「CAN ID」が割り当てられている。図4の例では、「CAN ID」は11ビットで表わされ、例えば「001」は「(0)000 0000 0001」を、「010」は「(0)000 0001 0000」を16進数で表している。CANプロトコルでは、「CAN ID」を数値として解釈した場合に数値が小さいほど優先順位が高い。つまり、図4の説明図では「CAN ID」が「001」のフレームが最も優先順位が上である。図4には、優先順位を数字で表わしている。
【0054】
また、図4に示すように、各フレームは属性としてボディ系(B)か制御系(C)かの系統に分けられており、各組み合わせに含まれるデータが用いられる用途を示す。更に、各IOU5a,5b,5c,5dは、各フレームを予め規定された送信周期で送信する。図4に示すように、各フレームには予め規定された送信周期が付与されている。
【0055】
各IOU5a,5b,…は、自身が送信するデータの「CAN ID」、送信周期の情報を記憶部51a,…に記憶しておく。例えば、IOU5aは、センサ1aからのボディ系のデータ及びセンサ1b,1cからの制御系のデータを含むフレームを送信するが、夫々の「CAN ID」は「020」及び「001」である。本実施の形態では、IOU5bは「CAN ID」が「050」及び「200」であるフレームを送信し、IOU5cは「CAN ID」が「010」及び「100」であるフレームを送信し、IOU5dは「150」であるフレームを送信する。
【0056】
このようにIOU5a,5b,…から送信されるフレームは、上述のように同一の系統などの関連性が高いデータがほぼ同時にそれらのデータを用いるECU3a,3bに夫々受信されるように送信タイミングが調整されることが望ましい。
【0057】
本実施の形態では、送信タイミングの調整のために、各フレームは含まれるデータの用途(系統)、送信周期又は優先順位によりグループ分けされる。そして、IOU5a,5b,…は、フレームのグループ分けの情報を記憶部51a,…に記憶しておき、各フレームがいずれのグループに属するかを制御部50a,…が認識できるようにしてある。更に、各フレームのデータには、送信タイミングの調整の基準となる特定のフレームが1つ、マスタとして設定されており、いずれのフレームがマスタであるかを示す情報が記憶部51a,…に記憶される。これにより、各IOU5a,5b,…の制御部50a,…は、いずれのフレームが同一のグループで、各グループのいずれのフレームがマスタであるかを記憶部51a,…を参照して認識し、処理を行なう。
【0058】
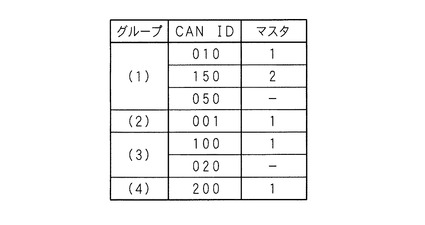
図5は、本実施の形態におけるIOU5aの記憶部51aに記憶されるグループ分けの情報の内容例を示す説明図である。なお図5に示す例は、図4に示した各フレームを分類した例である。
【0059】
図5に示す例では、各フレームはグループ(1)〜(4)に分類されており、グループ(1)には「CAN ID」が「010」、「150」及び「050」であるフレーム、グループ(2)には「CAN ID」が「001」であるフレームが1つ、グループ(3)には「CAN ID」が「100」及び「020」であるフレーム、グループ(4)には「CAN ID」が「200」であるフレームが属している。図5中に示されるマスタの数字は、マスタとしての優先順位を示す。優先順位が最も高いフレームがIOU5a,5b,…の故障などにより送信されない状況となった場合には、各IOU5a,5b,…は自身が送信するフレームが属するグループ内で次にマスタとしての優先順位が高いフレームをマスタとして認識して処理を行なう。
【0060】
図5に示す各グループ(1)〜(4)への分類は以下のように行なう。まず系統にて分類する。図4の内容例を参照すれば、ボディ系(B)のグループとして「CAN ID」が夫々「020」及び「100」であるフレームが分類され、制御系(C)のグループとして「CAN ID」が夫々「001」、「010」、「050」及び「150」であるフレームが分類される。なお、ボディ系及び制御系のいずれにも送信されるデータを含むフレームである「CAN ID」が「200」であるフレームは、別のグループに分類される。
【0061】
次に、各系統のグループに分類されたフレームについて、夫々のグループ内で最も送信周期が短いフレームを仮マスタとして定義する。ボディ系のグループでは、送信周期が「40(msec)」である「CAN ID」が「100」であるフレームが仮マスタとして定義される。制御系のグループでは送信周期が「20(msec)」である「CAN ID」が「010」(又は「150」)であるフレームが仮マスタとして定義される。その他のグループでは所属しているフレームは1つなので「CAN ID」が「200」であるフレームが仮マスタとして定義される。
【0062】
次に、各グループに分類されたフレームについて、仮マスタに定義されたフレームの送信周期のN倍(N=1,2,…;1以上の整数)の関係にないフレームを別のグループに分類する。上述のボディ系のグループでは、「CAN ID」が「100」であるフレームの送信周期は、仮マスタの送信周期は「40(msec)」の5倍である「200(msec)」であるからそのまま同一グループとされる。制御系のグループでは、仮マスタの送信周期は「20(msec)」であるが、「CAN ID」が「001」であるフレームの送信周期は「50(msec)」であってN倍でないので、別のグループに分類され、それ自身が仮マスタとして定義される。
【0063】
このようにして分類を行ない、仮マスタとして定義されたフレームをマスタとして設定する。上述の分類過程でいずれのグループにも属さないフレームが存在する場合、当該フレームは新たなグループとして分類され、それ自身が仮マスタとなる。
【0064】
なお、制御系のグループでは、最も送信周期が短いフレームが複数ある。このような場合、フレームの優先順位がより高いフレームを最終的に親フレームとする。この場合、「CAN ID」が「010」であるフレームがマスタとして定義される。これにより、図5に示したようなグループへの分類が実現される。
【0065】
IOU5a,5b,…は、このように分類されたフレームのグループ分けの情報を記憶部51a,…に記憶しておき、同一グループに属するフレームは、マスタのフレームの送信タイミングに近づけるように、マスタのフレーム同士は相互に送信タイミングが離れるように、即ち時間差が延長されるように送信タイミングの調整を行ない合う。
【0066】
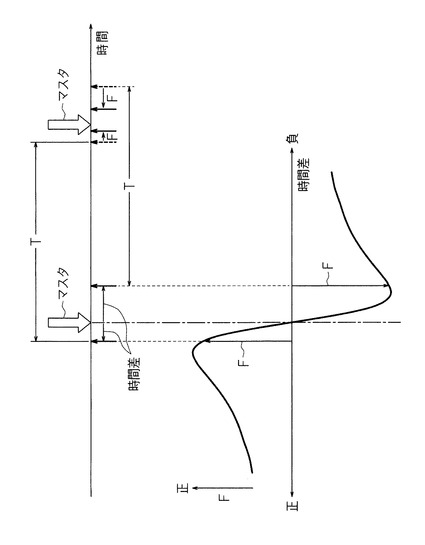
図6は、本実施の形態におけるIOU5a,5b,…による送信タイミングの調整処理の概要を示す説明図である。図6の上部には、マスタのフレームと、当該フレームと同一グループに属する他のフレームとの送信タイミングの関係を示す図を示す。図6の下部には、マスタのフレームと同一グループに属する他のフレーム夫々について、フレームの送信時点とマスタのフレームの送信時点との時間差に応じた、マスタの送信タイミングへ近づける力(F)の大きさを示すグラフを示す。
【0067】
本実施の形態における各IOU5a,5b,…による送信タイミングの調整は、図6に示すようにマスタのフレームの送信タイミングとの関係で調整する。IOU5a,5b,…は、自身が送信するフレームと同一グループに属するマスタのフレームの送信時点に対する自身が送信するフレームの送信時点からの時間差(=マスタの送信時点−自身の送信するフレームの送信時点)により以下の式(1)で求められる力F分を、次の送信タイミングに足して送信する。なお、式(1)中、rは時間差、G及びgは所定の定数である。
【0068】
【数1】
【0069】
これにより、IOU5a,5b,…は、自身が送信するフレームの送信時点が、マスタのフレームの送信時点よりも前である場合(図6上部の左側矢印)、力Fは正の値となるから、次の送信タイミングでは力F分だけプラスされ、遅らされる。逆に、自身が送信するフレームの送信時点が、マスタのフレームの送信時点よりも後である場合(図6上部の右側矢印)、力Fは負の値となるから、次の送信タイミングでは力F分だけマイナスされ、早められる。実施の形態1では、マスタのフレームの送信時点との時間差が極めて大きい場合には、それほど力Fは強く働かないが、所定の時間差である場合に最も強くタイミングが近づけられる。
【0070】
このように、マスタのフレームと同一グループに属する他のフレームを送信するIOU5a,5b,…は、マスタのフレームの送信時点との時間差から求められる力Fの大きさに応じた時間分だけ、次の送信タイミングを早めるか、又は遅らせることによって、マスタのフレームの送信タイミングとの時間差を短縮する。
【0071】
例えば、IOU5cから、グループ(1)のマスタである「010」のフレームが送信された場合、「050」のフレームを送信するIOU5b、及び「150」のフレームを送信するIOU5dの制御部は、マスタのフレームの送信時点を通信部からの通知により認識する。そして夫々の制御部は、自身が夫々フレーム送信しようとしている(送信済みである場合は送信した)時点との時間差を算出し、時間差に応じて、次の送信タイミングを早めるか、又は遅らせることで、時間差を短縮する。
【0072】
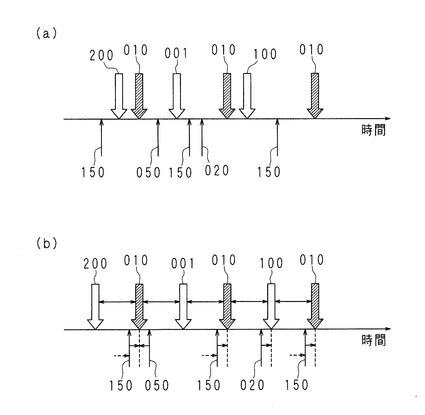
図7は、本実施の形態におけるIOU5a,5b,…による送信タイミングの調整処理の結果の具体例を模式的に示す説明図である。図7(a)は調整処理前、図7(b)は調整処理後の各フレームの送信時点の時間分布を示している。図7(a)及び(b)では、横軸に時間軸をとり、各フレームの送信時点を矢印にて示している。なお、時間軸の上側にマスタのフレームの送信時点、下側にマスタ以外のフレームの送信時点を示している。
【0073】
図7(a)に示す例では、「CAN ID」が「010」であるフレーム(ハッチングの矢印)は、「20(msec)」で周期的に複数回送信されている。「150」及び「050」のフレームは、「010」のフレームと同一グループに属するにも拘わらず、これらのフレームの送信タイミングは、他のグループに属する「200」のフレーム、「020」のフレーム、又は「001」のフレームとの送信タイミングと近接している。同様に、「020」のフレームは「CAN ID」が「100」であるフレームと同一グループであるにも拘わらず、その送信タイミングは離隔しており、他のグループのフレームのと近接している。
【0074】
これに対し、図7(b)では、マスタのフレームである「010」、「001」、「100」及び「200」のメッセージ間は、相互に送信タイミングが離れるように送信タイミングの調整が行なわれる。これにより、送信時点の時間差が略均一となっている。
【0075】
また、「CAN ID」が夫々「150」及び「050」であるフレームの送信タイミングは、IOU5b,5dの制御部の処理によって同一グループ(2)のマスタである「010」のフレームの送信タイミングに近づけられており、同一グループのフレームが近接して受信されるように調整されている。また、「CAN ID」が「020」であるフレームは、マスタのメッセージ「100」の送信タイミングに近づけられている。
【0076】
このようにして、各IOU5a,5b,…の処理により、ECU3a,3b、及びGW4へ送信すべきデータを含むフレームの送信タイミングが、各ECU3a,3bで必要なデータがまとめて受信されるように調整される。例えば、同一のグループに属して関連性が高い「CAN ID」が「010」、「150」及び「050」である制御系のデータを含むフレームは、図7(b)に示すようにCANバス7にほぼ同時に送信される。したがって、当該データを用いてアクチュエータ2の制御データを生成するECU3bは、これらを含むフレームをほぼ同時に受信することができる。このようにデータの同時性が高まってECU3a,3bにおける処理負荷も軽減され、車載制御システム全体におけるデータの授受が効率化される。
【0077】
図7(b)に示したように、各IOU5a,5b,…から送信されるフレームは、グループ毎にまとめて送信され、異なるグループのデータ同士は、送受信タイミングがずらされ、ほぼ均等な間隔で送信されるように安定化される。CANバス7では、1つのノードのみ送信が可能であるから送信タイミングが集中した場合に輻輳が起こり、優先順位が低いフレームの送信が滞るなどの問題が発生する。図7(b)に示したように、各フレームが効率よく送信されるからCANバス7における通信効率も向上する。通信効率の向上により、フレームが滞ることがないので、GW4経由の他のフレームについても遅延が発生することもなく、車載制御システム全体におけるフレーム即ちデータの授受の高速化も図られるなど、優れた効果を奏する。
【0078】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0079】
1a,1b,1c,1d,1e,1f,1g,1h,1i,1j センサ(機器)
2a,2b,2c,2d アクチュエータ(機器)
3a,3b ECU(制御装置)
5a,5b,5c,5d IOU(入出力装置)
50a 制御部(調整手段)
51a 記憶部
52a 通信部(通信手段)
53a 計時部(検知手段)
【特許請求の範囲】
【請求項1】
データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置とに接続され、前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置において、
特定のデータが制御装置又は他の入出力装置から送信される時点を検知する検知手段と、
該手段が検知した時点、及び、自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータの送信時点を調整する調整手段と
を備えることを特徴とする入出力装置。
【請求項2】
予め複数のグループに分けられたデータの識別情報、及び各グループに1つずつ前記特定のデータとして設定されるデータの識別情報を、グループ毎に記憶する手段を備え、
前記調整手段は、自身が送信するデータと同一のグループの特定のデータが送信された時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が短縮されるように、次のデータ送信時点を調整するようにしてあること
を特徴とする請求項1に記載の入出力装置。
【請求項3】
前記調整手段は、自身が送信するデータが特定のデータであり、該特定のデータと異なるグループの特定のデータの送信時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が延長されるように、次のデータ送信時点を調整するようにしてあること
を特徴とする請求項2に記載の入出力装置。
【請求項4】
各データには属性が対応付けられており、
前記グループは、同一属性が対応付けられているデータが同一グループとなるように分けられていること
を特徴とする請求項2又は3に記載の入出力装置。
【請求項5】
各グループ内の送信周期が短いデータが前記特定のデータとして設定されていること
を特徴とする請求項2乃至4のいずれかに記載の入出力装置。
【請求項6】
各グループは、送信周期が特定のデータの送信周期の倍数であるデータからなるように分けられていること
を特徴とする請求項2乃至5に記載の入出力装置。
【請求項7】
各データには、優先順位が付与されており、各グループ内の優先順位が高いデータが前記特定のデータとして設定されていること
を特徴とする請求項2乃至6のいずれかに記載の入出力装置。
【請求項8】
データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置と、前記複数の機器及び前記複数の制御装置に接続されて前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置とを含み、前記複数の制御装置及び前記入出力装置は通信線にバス型に接続され、前記複数の制御装置は前記入出力装置を介して複数の機器を制御するようにしてある制御システムにおいて、
前記入出力装置は、
特定のデータが制御装置又は他の入出力装置から前記通信線に送信される時点を検知する検知手段と、
該手段が検知した時点、及び、前記通信手段により自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータ送信時点を調整する調整手段と
を備えることを特徴とする制御システム。
【請求項1】
データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置とに接続され、前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置において、
特定のデータが制御装置又は他の入出力装置から送信される時点を検知する検知手段と、
該手段が検知した時点、及び、自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータの送信時点を調整する調整手段と
を備えることを特徴とする入出力装置。
【請求項2】
予め複数のグループに分けられたデータの識別情報、及び各グループに1つずつ前記特定のデータとして設定されるデータの識別情報を、グループ毎に記憶する手段を備え、
前記調整手段は、自身が送信するデータと同一のグループの特定のデータが送信された時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が短縮されるように、次のデータ送信時点を調整するようにしてあること
を特徴とする請求項1に記載の入出力装置。
【請求項3】
前記調整手段は、自身が送信するデータが特定のデータであり、該特定のデータと異なるグループの特定のデータの送信時点を前記検知手段により検知した場合、検知した時点と送信するデータの送信時点との時間差が延長されるように、次のデータ送信時点を調整するようにしてあること
を特徴とする請求項2に記載の入出力装置。
【請求項4】
各データには属性が対応付けられており、
前記グループは、同一属性が対応付けられているデータが同一グループとなるように分けられていること
を特徴とする請求項2又は3に記載の入出力装置。
【請求項5】
各グループ内の送信周期が短いデータが前記特定のデータとして設定されていること
を特徴とする請求項2乃至4のいずれかに記載の入出力装置。
【請求項6】
各グループは、送信周期が特定のデータの送信周期の倍数であるデータからなるように分けられていること
を特徴とする請求項2乃至5に記載の入出力装置。
【請求項7】
各データには、優先順位が付与されており、各グループ内の優先順位が高いデータが前記特定のデータとして設定されていること
を特徴とする請求項2乃至6のいずれかに記載の入出力装置。
【請求項8】
データを入力又は出力する複数の機器と、該複数の機器のいずれかが出力するデータを使用するか、又はいずれかの機器を制御する制御装置と、前記複数の機器及び前記複数の制御装置に接続されて前記機器から出力されるデータを前記制御装置へ周期的に送信する手段、及び前記制御装置からの制御データをいずれかの機器へ入力する手段を備える入出力装置とを含み、前記複数の制御装置及び前記入出力装置は通信線にバス型に接続され、前記複数の制御装置は前記入出力装置を介して複数の機器を制御するようにしてある制御システムにおいて、
前記入出力装置は、
特定のデータが制御装置又は他の入出力装置から前記通信線に送信される時点を検知する検知手段と、
該手段が検知した時点、及び、前記通信手段により自身がデータを送信するデータ送信時点の時間差に基づき、時間差が短縮又は延長されるように次のデータ送信時点を調整する調整手段と
を備えることを特徴とする制御システム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−247791(P2010−247791A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−102132(P2009−102132)
【出願日】平成21年4月20日(2009.4.20)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月20日(2009.4.20)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]