
入出力装置
【課題】システムの省線化を図ると共に、制御装置における処理負荷は軽減しつつも、制御システム全体におけるデータの授受の高速化及び効率化を図ることができる入出力装置を提供する。
【解決手段】センサ1,1,…及びアクチュエータ2,2,…と、ECUとの間の入出力を処理するIOU5は、記憶部52を備えて、センサ1,1,…及びアクチュエータ2,2,…から得られるセンサ情報、制御状態情報等を含むデータをデータベース56として記憶する。そして、IOU5は入出力処理部54の処理により、ECU又は他のIOU5,5,…が必要とするデータをデータベース56から抽出し、必要とされるタイミングにて出力する。
【解決手段】センサ1,1,…及びアクチュエータ2,2,…と、ECUとの間の入出力を処理するIOU5は、記憶部52を備えて、センサ1,1,…及びアクチュエータ2,2,…から得られるセンサ情報、制御状態情報等を含むデータをデータベース56として記憶する。そして、IOU5は入出力処理部54の処理により、ECU又は他のIOU5,5,…が必要とするデータをデータベース56から抽出し、必要とされるタイミングにて出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の機器と、該複数の機器からの情報を使用して機器の制御を行なう制御装置との間で前記複数の機器の制御装置に対する入出力を処理する入出力装置に関する。特に、各機器から入力されるデータをデータベースとして集約して記憶しておくことでデータの出力タイミングなどを適宜調整することなどを可能とし、データの授受の高速化及び効率化、機器の制御を行なう制御装置における処理負荷の軽減を図ることができる入出力装置に関する。
【背景技術】
【0002】
近年では、多数の機器を制御して、全体として多様な機能を実現させる制御システムが普及している。機器には夫々制御装置が接続され、更に各制御装置に通信手段を設けて相互にデータを交換させ、個々の制御装置が独立した制御を行なうのではなく、他の制御装置などを介して得られるデータに基づいて自身に対応する制御対象の機器を制御するなど、連携して制御を実行する制御システムが各分野で利用されている。
【0003】
このような制御システムでは、機能の増加に伴ない、制御対象の機器の数も増加すると共に、制御に用いるデータを取得、又は測定するセンサなどの機器の数も増加する。
【0004】
特に車両の分野では、各種機能に対応するアクチュエータ又はセンサなどの機器が多数車内に配され、各機器を制御する制御装置としてECU(Electronic Control Unit)が各々に対応して配されて動作している。車両の制御は機械的制御から電気的制御へ移行しつつあり、更に、制御システムによって実現される機能の特化、実現できる機能の増加及び多様化が進んでいる。これにより、車両に搭載されるアクチュエータ、センサなどの機器が増加している。
【0005】
このように、制御対象の機器、又は制御に用いるデータを取得するセンサなどの機器の数は増大する。機器の数が増大した場合、各機器に各々制御装置が対応する構成では、制御装置の数も増大して相互の通信における通信負荷が重くなるなどの事態が考えられる。この場合、データの送受信の遅れの発生の問題、又は、ほぼ同時に受信することが期待されるデータの受信タイミングに時間差が生じるなどの問題が起こる。
【0006】
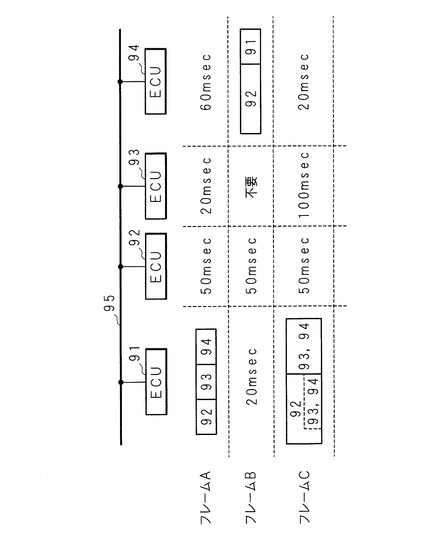
図11は、制御システムの典型的構成と、各ECUから送信されるデータの内容及びデータを必要とするタイミングとを模式的に示す説明図である。図11に示す制御システムは、ECU91,92,93,94を含む。ECU91,92,93,94はいずれも通信線95にバス型に接続され、相互に通信することが可能である。
【0007】
ECU91には、図示しない1又は複数のセンサが接続されており、ECU91はセンサから得られるデータを一定周期で送信するようにしてある。ECU92には、図示しないアクチュエータが接続されており、ECU92がアクチュエータの動作を制御するようにしてある。ECU93は、判定処理などを行なうようにしてある。ECU94にも図示しない1又は複数のセンサが接続されており、ECU94はセンサから得られるデータを一定周期で送信するようにしてある。
【0008】
例えば、ECU91は、センサにて得られるデータに基づき、ECU92,93,94が必要とするデータを組み合わせてフレームAとして通信線95へ送信するようにしてある。このときECU92は、ECU91からのデータを50msec(ミリ秒)の周期で必要とし、ECU93はECU91からのデータを20msecの周期で必要とし、ECU94はECU91からのデータを60msecの周期で必要としているとする。この場合、ECU91は、最も短い周期の20msecにてフレームAを送信する。ECU94も、センサにて得られるデータに基づき、ECU91,92が必要とするデータを組み合わせてフレームBとして通信線95へ送信するようにしてある。ECU94は、ECU91,92の内のいずれかがフレームBを必要とする周期20msec及び50msecの内、最も短い20msecにてフレームBを送信するようにしてある。
【0009】
ECU92は、フレームA及びフレームBに含まれるデータと、自身が保有するデータとを用いた演算処理の結果に基づいてアクチュエータの動作を制御するようにしてある。フレームAのデータとフレームBのデータとがほぼ同時に得られたデータである場合、演算結果の精度が高まるから、同時に得られたデータであることが望ましい。例えば、フレームAに含まれるデータとフレームBに含まれるデータとが、50msec程度異なるタイミングにて夫々センサからの入力に基づき得られたデータである場合、データの内容によっては演算結果の精度が低く制御に不適となる問題がある。
【0010】
更にこの場合、ECU94は、フレームAを60msecの周期にて受信できればよいにも拘わらず、ECU93が必要とする周期である20msec毎にフレームAを受信する。つまり、ECU94としては同一の内容のデータを不要に多く受信することになる問題がある。
【0011】
他の例として、ECU91がセンサにて得られるデータを送信するに際し、ECU92は当該データを高精度のデータで必要とし、ECU93,94は低精度のデータで十分であるとし、しかもECU92,93,94が当該データを必要とする周期は図11に示すように異なる場合を考える。具体的には、ECU92はアクチュエータの制御のために、ECU91がセンサにて得られるデータを16ビットの精度で必要とするが、ECU93,94は同じデータを8ビットの精度で必要とする。この場合、ECU91が当該データを8ビットのデータにする演算後に16ビットの精度のデータと共にフレームCとして送信するのか、又は16ビットの精度のデータのみをフレームCとして送信し、ECU93,94が夫々演算して用いるのか、両方の構成が考えられる。どちらの構成が好ましいかは、通信線95における通信量の節減と、各ECU91,92,93,94における演算負荷とのいずれを、システムにおける優先事項にするかによって定まる。
【0012】
このような各種問題に対して、制御システム全体で各ECUが必要とするデータの送受信タイミング、通信量等を最適化するためには、フレームにいずれのデータをどれ程の精度で含めて送信するのか、そしてそのフレームをどのような周期で各ECUから送信させるのかを設計することが重要である。しかしながら、制御システムに含まれるセンサ、アクチュエータ、及びそれらに対応するECUの数の多さから、データの種類も膨大になり、設計は非常に複雑であり、設計工程に多大な労力がかかる。
【0013】
一方、車両におけるECUを利用した制御システムでは、ワイヤー・ハーネスの肥大化、システムの構成部品点数の増加といった問題から、センサ、アクチュエータなどの機器との間の入出力を集約する構成が提案されている(特許文献1、2など)。また、ECUの数は上述のように増大しており、且つ1つの通信線に接続されるECUの数がリンギング防止などの問題から限られるから、通信線の数が増加する。車両の分野では特に、燃費の改善及び環境への影響を考慮して車両全体の軽量が重要な課題となっている。軽量化には通信線、信号線、電源線などの各種電線を含むワイヤハーネスの軽量化が大きく影響するので、各種電線自体の軽量化及び省線化が望まれている。
【0014】
特許文献1では、入出力装置が各機器から得たデータを多重化して制御装置である車載ECUへ伝送する構成とすることにより、省線化を図っている。特許文献2では、通信により多重化したデータを送信する構成をシフトレジスタを用いて出力する構成とすることにより、ECUの部品点数を削減して小型化できる入出力装置が提案されている。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開平7−95659号公報
【特許文献2】特開2008−296871号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
特許文献1、2に開示されているように、複数の機器から出力されたデータに対する演算を共通の演算手段で行ない、更に情報を多重化してECUへ通信により伝送するか、又はシフトレジスタを介して出力する構成により、通信線、信号線の削減を図ることができる。
【0017】
特許文献1、2に開示されている構成では、センサなどから得られたデータをまとめて出力することができるものの、それらのデータを出力するタイミングをECUからの要求に応じて適宜調整することは考慮されていない。したがって、例えば入出力装置から各データをECUへ出力するタイミングは、センサなどから出力されたタイミングであろうと推測される。データの多重化についても、ECUが必要とするデータを組み合わせることを考慮していることは示唆されていない。このように、ECUが必要とするデータ、必要とするタイミングに応じたデータの授受の最適化のためには依然として、多大な労力をかけて入出力のタイミング及びフレームの設計を行なう必要がある。
【0018】
本発明は斯かる事情に鑑みてなされたものであり、制御システムを構成する複数の機器と各機器の制御装置との間でデータの入出力を処理する入出力装置が、一旦各機器からのデータを記憶しておき、適宜、制御装置からの必要に応じてデータの授受を実行することにより、システムの省線化を図ると共に、制御装置における処理負荷は軽減しつつも、制御システム全体におけるデータの授受の高速化及び効率化を図ることができる入出力装置を提供することを目的とする。
【課題を解決するための手段】
【0019】
第1発明に係る入出力装置は、データを入力又は出力する複数の機器と、いずれかの機器からのデータを使用するか、又は機器へデータを与えることにより機器を制御する1又は複数の制御装置との間に接続され、前記複数の機器の前記1又は複数の制御装置への入出力を処理するようにしてある入出力装置において、入出力されるデータを記憶するための記憶部を備え、該記憶部に前記複数の機器のいずれかから入出力されるデータをデータベース形式にて記憶する手段と、前記データベースに記憶されている1又は複数のデータに基づき、前記制御装置から必要とされるデータを必要とされるタイミングにて出力する出力手段とを備えることを特徴とする。
【0020】
第2発明に係る入出力装置は、前記制御装置から必要とされるデータの識別情報と、前記データが前記制御装置から必要とされる出力タイミングとの対応を示す対応テーブルを備え、前記出力手段は、前記対応テーブルの識別情報及び出力タイミングに基づいて、前記データベースからデータを読み出して出力するようにしてあることを特徴とする。
【0021】
第3発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータの変化の有無を判断する手段を備え、該手段が有と判断した場合に変化後のデータを出力するようにしてあることを特徴とする。
【0022】
第4発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータと所定値との比較に基づき前記データを出力するようにしてあることを特徴とする。
【0023】
第5発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータを複数組み合わせて出力するようにしてあることを特徴とする。
【0024】
第6発明に係る入出力装置は、前記制御装置からのデータ出力要求を受け付ける手段と、前記データ出力要求に応じて前記データベースからデータを抽出して出力する手段と、前記データ出力要求に基づき前記対応テーブルを更新する手段とを備えることを特徴とする。
【0025】
第7発明に係る入出力装置は、前記制御装置から必要とされるデータを、前記データベースに記録されている1又は複数のデータを用いた演算により求める演算手段を備え、前記出力手段は、演算により求めたデータを出力するようにしてあることを特徴とする。
【0026】
第8発明に係る入出力装置は、前記演算手段により求めたデータを前記データベースに記憶するようにしてあることを特徴とする。
【0027】
第9発明に係る入出力装置は、前記データベースに記憶されているデータを、前記複数の機器の内のいずれか特定の機器へ該特定の機器の動作を制御すべく出力する手段を備えることを特徴とする。
【0028】
第10発明に係る入出力装置は、接続されている複数の機器夫々に対応して特定の処理を行なうべく構成される複数の処理回路を備え、前記複数の処理回路は夫々、前記データベースにデータを記憶し、又は前記データベースからデータを抽出する手段を備えることを特徴とする。
【0029】
第11発明に係る入出力装置は、前記複数の処理回路の内の一部又は全部は、対応する機器から出力されたデータに基づき他のデータを求める演算処理を行ない、演算結果に基づき制御データを他の機器に対応する処理回路へ出力する手段を備えることを特徴とする。
【0030】
第12発明に係る入出力装置は、前記複数の処理回路の内の一部又は全部は、前記データベースに記憶されているデータに基づき、対応する機器の動作の停止又は起動を制御する手段を備えることを特徴とする。
【0031】
第13発明に係る入出力装置は、前記複数の機器が夫々、入力又は出力するデータに基づき、異常を検知する手段を備えることを特徴とする。
【0032】
第1発明では、複数の機器及び機器を制御する制御装置との間の入出力を処理する入出力装置にて、各機器又は制御装置からのデータを一旦データベースの形式にて集約して記憶しておく。データベースに集約されて記憶されていることにより、入出力装置は機器から出力されたタイミングで逐次制御装置へデータを出力するなどのように各機器と制御装置との間の入出力を中継するのみならず、適宜、制御装置が必要とするデータを必要とするタイミングとなるように調整してデータを出力することが可能である。これにより、必要なデータのみの授受となるので、無用なデータの授受、授受されるデータ量の節減など効率化、最適化を図ることができる。また、制御装置は複数の機器又は他の装置から夫々任意のタイミングで出力されるデータの入出力のタイミングの調整処理、データの時間精度の判定処理を行なうことなく制御処理のみに専念できる。
【0033】
第2発明では、対応テーブルに基づき、データベースに集約されて記憶されているデータが適宜出力される。制御装置が必要とするデータと必要とされるタイミングとの明確な対応に基づいて出力されるから効率的なデータの授受を実現することが可能である。
【0034】
第3発明では、制御装置が必要とするデータが、当該データの内容が変化したデータである場合、入出力装置にてその必要に応じて変化が有った場合に出力される。制御装置は不要に同じデータを受け続ける必要が無い。これにより、データの授受は効率化され、制御装置の処理負荷は軽減される。
【0035】
第4発明では、制御装置が必要とするデータが、所定の閾値よりも大きい又は小さいかなどの所定の条件を満たしたデータである場合、入出力装置からは、その必要に応じて所定の条件を満たした場合のみ出力される。制御装置は不要にデータを受けずともよい。これにより、データの授受は効率化され、制御装置の処理負荷は軽減される。
【0036】
第5発明では、制御装置が演算処理、判定処理などのために、機器が出力する複数のデータを必要とする場合、該複数のデータは、入出力装置にて夫々任意のタイミングと任意の精度に調整された上で組み合わせられ、制御装置へまとめて出力される。制御装置は入出力装置から出力されたままのデータを用いて処理を行なえばよい。またこの場合、制御装置は必要な複数のデータを同時に取得することが可能である。
【0037】
第6発明では、制御装置から明示的にデータの出力要求がされた場合、入出力装置は当該出力要求に応じてデータを出力すると共に、記憶してあるテーブルに要求されたデータ及び要求されるタイミングにより対応テーブルを更新する。したがって、新たに加わった制御装置がある場合であっても、データの授受をより効率化することができる。
【0038】
第7発明では、制御装置が必要とするデータが、各機器から得られる複数のデータに基づく演算処理により得られるデータである場合、入出力装置にて演算が行なわれて出力される。これにより、全てのデータを授受させることなしに、制御装置で必要とされるデータのみを授受してデータの授受を効率化、最適化することができると共に、制御装置にて演算処理を省略することができ、制御装置の処理負荷を軽減させることが可能である。
【0039】
第8発明では、第7発明において、制御装置が必要とするデータが演算処理により得られるデータである場合に、入出力装置が演算を肩代わりするのみならず、その結果がデータベースに記憶される。これにより演算結果も必要に応じて利用できる。
【0040】
第9発明では、入出力装置が、データベースのデータに基づき機器の動作を制御すべくデータを機器へ出力する。制御装置から出力される制御データが、任意のタイミングで出力されるとしても、データベースに一旦記憶されるから、制御装置が出力タイミングを調整せずとも、入出力装置における処理によって適宜、制御対象の機器へ制御データを適したタイミングで出力して制御することが可能である。
【0041】
また第9発明では、各機器と制御装置との間で入出力されるデータがデータベースに集約されているから、一の機器からのデータと、データベースに記憶されているデータとに基づいて他の機器が制御される場合、前記一の機器からのデータを制御装置へ出力するまでもなく、入出力装置内で、前記一の機器からのデータとデータベースに記憶されているデータとに基づく制御データを生成することも可能である。これにより、制御装置への不要な出力をせずにデータの授受を効率化できると共に、制御装置の処理負荷を軽減することもできる。
【0042】
第10発明では、入出力装置に接続されている機器夫々に対応する処理回路が備えられ、各処理回路がデータベースからのデータの抽出、データの記憶処理などを行なう。このように処理回路を並列構成とすることにより、高速化を図ることができる。
【0043】
第11発明では、第10発明における各機器に対応した処理回路の一部又は全部は、いずれかの機器の制御に用いられる制御データを求める演算処理を行なうことが可能に構成されており、当該機器に対応する処理回路へ制御データを出力する。当該演算により得られた制御データはデータベースに記憶され、制御装置が必要とする場合は出力されてもよい。入出力装置内で制御データをも作成して各機器を制御することにより、不要にデータを制御装置へ出力することもなく入出力されるデータ量を節減できると共に、制御装置における演算の結果を待たずに高速に制御を行なうことも可能である。
【0044】
第12発明では、第10又は第11発明における処理回路は夫々、データベースに記憶されている所定のデータの内容に応じて停止又は起動する。これにより、制御システムの状態が総合的に所定の状態であるときには、接続される各機器に対する処理さえも停止させるなど、状態に応じてより複雑な演算、動作の制御を実行することが可能となるほか、電力消費量も抑えることができる。
【0045】
第13発明では、入出力装置は各機器及び制御装置にて入出力されるデータをデータベースに集約して記憶しているから、データベース全体のデータの内容、例えば数値情報又は真偽情報を総合的に考慮して異常を検知することが可能である。入出力装置が各機器からの各データを制御装置へ逐次出力して制御装置にて異常を検知する構成よりも、入出力されるデータ量も節減されて効率的である。また、入出力装置により複数の機器が一元管理されるため、夫々の機器のデータから異常状態をより詳細に識別することもできる。
【発明の効果】
【0046】
本発明による場合、アクチュエータ、センサなどの各機器と、センサから出力されるデータに基づいてアクチュエータに制御データを与えて制御する制御装置とを含む制御システムで、各機器と制御装置との間の入出力が入出力装置に集約されることで、通信線、信号線等を削減することができるのでシステムの省線化を図ることができる。
【0047】
更に、入出力装置にて、制御装置が必要とするタイミングで必要なデータが適宜出力されるので、制御装置はデータを好ましいタイミングで取得して処理を行なうことができ、制御装置がタイミングを見計らって他の制御装置へ送信するなどの処理を行なう必要がなくなる。制御システム全体におけるデータの授受の効率化、最適化が為されて、データ量の節減ができることから、データの授受の高速化も実現できる。
【0048】
入出力装置は、データベースにより各機器の状態の変化、制御装置からの要求の変化を認識することができるため、その状況に応じて動作を変更でき、各機器の制御方法の変更、制御装置がデータを必要とするタイミングを変更することができる。
【0049】
また、各機器又は制御装置からデータを集約して記憶している入出力装置が行なうことで効率化される処理は、入出力装置にて行なわれる。これにより、制御装置における処理負荷を軽減させることができる。
【図面の簡単な説明】
【0050】
【図1】実施の形態1における車載制御システムの構成を示す構成図である。
【図2】実施の形態1におけるIOUの内部構成を示すブロック図である。
【図3】対応テーブルの内容例を示す説明図である。
【図4】実施の形態1における入出力処理部による処理手順の一例を示すフローチャートである。
【図5】実施の形態1における入出力処理部が対応テーブルを更新する処理手順の一例を示すフローチャートである。
【図6】実施の形態2におけるIOUの内部構成を示すブロック図である。
【図7】実施の形態3における車載制御システムの構成を示す構成図である。
【図8】実施の形態3におけるIOUの内部構成を示すブロック図である。
【図9】実施の形態3におけるIOUによる異常検知の処理手順の一例を示すフローチャートである。
【図10】実施の形態4におけるIOUの内部構成を示すブロック図である。
【図11】制御システムの典型的構成と、各ECUから送信されるデータの内容及びデータを必要とするタイミングとを模式的に示す説明図である。
【発明を実施するための形態】
【0051】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。なお、以下に示す実施の形態では、車両に搭載されている多数のアクチュエータ、センサ及びECUを含む車載制御システムに本発明に係る入出力装置を用いた例を挙げて説明する。
【0052】
(実施の形態1)
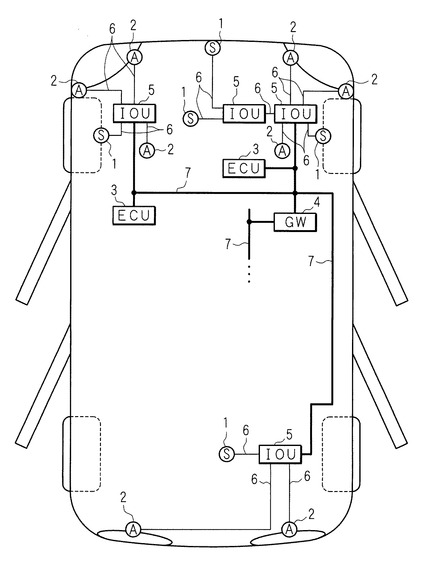
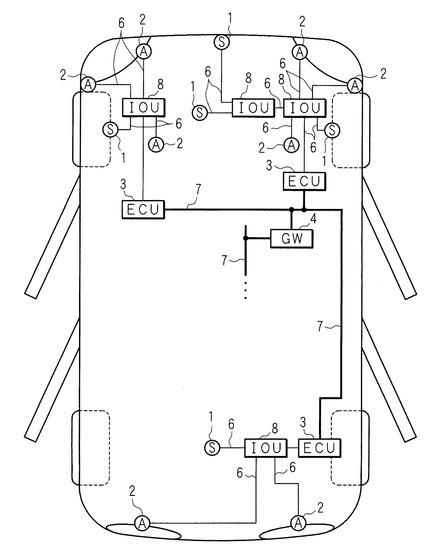
図1は、実施の形態1における車載制御システムの構成を示す構成図である。車載制御システムは、車両の前部に搭載された温度センサ若しくはカメラ、タイヤの軸に取り付けられる車輪速センサ、又はヨーレートセンサなどの各種センサ1,1,…と、ヘッドライト、スモールランプ、リアランプ、ドアロックなどボディ系の各種アクチュエータ2,2,…と、各種センサ1,1,…から得られるデータに基づいてアクチュエータ2,2,…の動作を制御するECU3,3と、異なるネットワーク間のデータの授受を中継するGW(Gate Way)4とを含み、更に、各種センサ1,1,…及びアクチュエータ2,2,…と、ECU3,3との間の入出力装置(図示及び以下の説明にてIOU(In-Out Unit:入出力ユニット)という)5,5,…とを含む。
【0053】
各種センサ1,1,…及びアクチュエータ2,2,…は夫々、信号線6,6,…によりIOU5,5,…に接続されている。センサ1,1,…及びアクチュエータ2,2,…間は、LIN(Local Interconnect Network)により通信する構成としてもよい。
【0054】
ECU3,3,…、GW4、及びIOU5,5,…は夫々、CAN(Controller Area Network)バス7に接続されており、相互に制御用のデータを送受信する。実施の形態1ではECU3,3,…、GW4、及びIOU5間の通信のプロトコルはCANとするが、これに限らず、FlexRay(登録商標)等でもよい。一部のIOU5は異なるIOU5に信号線6により接続されている。
【0055】
IOU5,5,…には夫々、車両内で近傍に配置されているセンサ1,1,…とアクチュエータ2,2,…とが接続されている。図1に示す例では、車両前部の左部分に1つのセンサ1と、3つのアクチュエータ2,2,2とが近くに配されており、これらは1台のIOU5に接続されている。また、車両前部中央に配されているセンサ1,1も、同一のIOU5に接続されている。センサ1,1,…及びアクチュエータ2,2,…が、ECU3,3に各々接続される構成でなく、近傍に配置されるIOU5,5,…に接続されて、IOU5,5,…によりECUとの間の入出力が集約されることで、信号線6,6,…の長さも比較的短くて済む点、省線化に効果的である。
【0056】
また、実施の形態1では図1に示すように、センサ1,1,…及びアクチュエータ2,2,…は、各々に対応するECUと接続される構成でなく、IOU5,5,…によって集約されてECU3,3に接続される構成としている。これにより、ECU3,3の統合も容易になるほか、統合によるECU数の削減と、これによるCANバス7の数の削減ができる。この点でも省線化に効果的である。
【0057】
各センサ1,1,…で得られる制御データは、近くに配置されていて同一のIOU5に接続されるアクチュエータ2の動作の制御に用いられるとは限らない。車載制御システムでは、物理的配置における距離と、機能的配置における距離とは異なるからである。例えば、車両の後部に搭載されているセンサ1にて得られる測定値などのデータが前部で動作するアクチュエータの制御に必要である場合がある。また、その測定値のデータが必要なタイミングは、測定値のデータの利用のされ方によっても異なる。例えば、アクチュエータ2の回転数を決定して制御データを求めるためには、測定値データは30msec毎にECU3により必要とされるが、他のアクチュエータ2のオン/オフの切替を決定するためには、100msec毎でよい場合などが考えられる。
【0058】
そこで、実施の形態1におけるIOU5,5,…は、センサ1,1,…及びアクチュエータ2,2,…とECU3との間の入出力を物理的に集約するのみならず、IOU5,5,…から出力される段階で、出力するデータの内容、データの精度などを適宜、当該データを用いるECU3からの必要に応じて調整して出力する。
【0059】
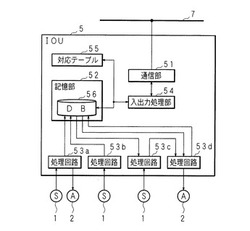
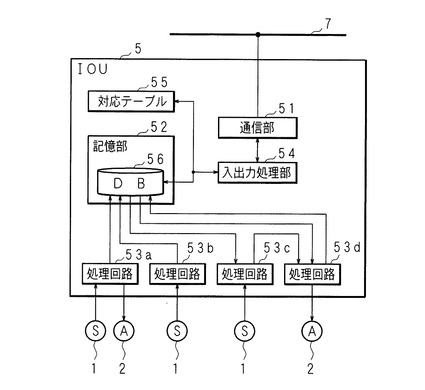
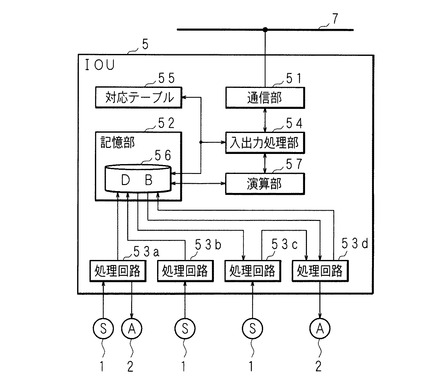
IOU5,5,…にこのような機能を実現させるための構成について説明する。図2は、実施の形態1におけるIOU5の内部構成を示すブロック図である。IOU5はASIC(Application Specific Integrated Circuit:特定用途集積回路)で構成され、CANバス7に接続する通信部51と、記憶部52と、センサ1,1,1及びアクチュエータ2,2夫々に対応して特定の処理を行なうべく構成された処理回路53a,53b,53c,53dと、入出力処理部54と、対応テーブル55とが備えられている。
【0060】
通信部51は、CANバス7を介した通信を実現するためのCANトランシーバ、及びCANコントローラの機能を有し、CANバス7における通信を制御する。通信部51は、後述するように入出力処理部54からデータが与えられた場合、当該データをCANプロトコルの信号(CANフレーム)に載せ、CANトランシーバにて物理層における信号の送信を実現する。また、通信部51は、CANバス7にて他のECU3,3、IOU5、及びGW4から送信されたデータ、データの送信要求などのCANフレームを受信した場合、データを抽出して入出力処理部54へ通知する。
【0061】
記憶部52は、SRAM(Static Random Access Memory)、DRAM(Dynamic Random Access Memory)等のランダムアクセスメモリを用いる。記憶部52には、IOU5に接続されているセンサ1,1,…から出力されたデータ、アクチュエータ2,2,…の動作状態などを示すデータ、後述する処理回路53a,53b,53c,53dのいずれかによる演算結果のデータなどを含むデータベース(DB:Data Base)56が記憶されている。データベース56には、ECU3,3,…、GW4又はIOU5,5,…から送信されて通信部51にて受信することにより入力された制御用のデータも記憶される。
【0062】
処理回路53a,53b,53c,53dは夫々、センサ1又はアクチュエータ2に接続されている。そして、処理回路53a,53b,53c,53dはいずれもデータベース56にアクセスが可能であって、データベース56へのデータの書き込み、又はデータベース56からのデータの抽出が可能である。
【0063】
図2に示す例では、処理回路53aにはセンサ1及びアクチュエータ2が接続されている。処理回路53aは、接続されているセンサ1により得られるセンサ情報に基づき、アクチュエータ2の動作量を演算して直接的にアクチュエータ2の動作を制御するようにしてある。そして処理回路53aは、センサ1により得られたセンサ情報のデータ、及びアクチュエータ2の動作状態を示すデータをデータベース56に書き込む。このとき、センサ1及びアクチュエータ2が夫々、IOU5の処理回路53aによりハードウェア的に処理されるから、ECUで制御する必要が無く、ECUの処理負荷が軽減される。そしてアクチュエータ2の動作状態を示すデータがデータベース56に記憶される。したがって、他のアクチュエータ2の制御のためにECU3,3から当該動作状態を示すデータが必要とされた場合、IOU5が出力することにより、ECU3,3、GW4、及び他のIOU5,5,…でも状況を把握して適宜制御に用いることができる。
【0064】
処理回路53bには、センサ1が接続されている。処理回路53bは、接続されているセンサ1により得られる測定値などのセンサ情報を抽象化してデータベース56に書き込む。例えば、センサ1が車輪速センサである場合、具体的には時間当たりの回転数が物理量として得られるのに対し、処理回路53bは回転数の値を3段階、即ち低速、中速、高速に区別し、夫々に対応する状態を示すデータにしてデータベース56に書き込む。したがって、データベース56で車輪速は、具体的な回転数ではなく低速、中速、又は高速などの抽象化された情報にて記憶される。
【0065】
処理回路53cには、更に別のセンサ1が接続されている。処理回路53cは、接続されているセンサ1により得られる測定値などのセンサ情報と、他のセンサ1からのセンサ情報、例えばCANバス7を介して他のIOU5から送信されてデータベース56に記憶されているセンサ情報とに対する所定の演算処理を行ない、処理回路54dへ演算結果を通知する。
【0066】
処理回路53dには、アクチュエータ2が接続されている。処理回路53dは、処理回路53cからの演算結果と、データベース56から抽出した所定のデータとに基づいてアクチュエータ2の動作量を決定して動作を制御するようにしてある。更に処理回路53dは、アクチュエータ2の動作状態を示すデータをデータベース56に書き込む。
【0067】
処理回路53a,53b,53c,53dは、データベース56の所定のデータの内容に応じて、自身の停止又は起動を制御するように構成されている。例えば、外部からイグニッションスイッチの状態を示すデータが送信された場合、後述するように入出力処理部54は通信部51によりこれを受信してデータベース56に書き込む。例えば処理回路53aは、イグニッションスイッチの状態がアクセサリーオン、イグニッションオン、スタートである場合に起動するように構成され、処理回路53bは、イグニッションオンである場合のみに起動するように構成されている。
【0068】
入出力処理部54も特定の処理をすべく構成された回路で実現され、対応テーブル55、及びデータベース56にアクセスが可能である。入出力処理部54は、対応テーブル55に記憶されているデータの識別情報と、前記データの出力タイミングとの対応に基づき、データベース56からデータを抽出して通信部51を介してECU3,3、及びGW4へデータを送信する。
【0069】
このように、データベース56に記憶されているデータは、IOU5において一元管理の下に直接的に各センサ1,1,…及びアクチュエータ2,2,…から得られているから、各データが更新される時間差を小さくすることができる。したがって、入出力処理部54が、データベース56から複数のデータを抽出して送信する場合、データの同時性も向上する。
【0070】
なお、対応テーブル55は、フラッシュメモリなどの不揮発性メモリを用いる。対応テーブル55には、入出力処理部54が参照することができるように、データの識別情報と、各データの出力タイミングとの対応が予め記憶されている。対応テーブル55の内容は、ECU3,3、GW4、又は他のIOU5,5,…における処理に必要とされるデータと、ECU3,3、GW4、又は他のIOU5,5,…で必要とするタイミングとの対応であり、車載制御システムの設計に応じて予め記憶されるものである。
【0071】
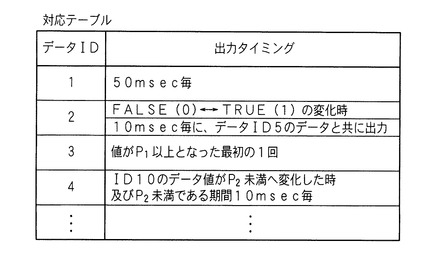
図3は、対応テーブル55の内容例を示す説明図である。図3に示すように、対応テーブル55には、データを識別するデータIDと、データの出力タイミングとの対応が含まれている。
【0072】
例えば、データID「1」のデータは、50msec毎に一定周期でデータベース56から抽出されてIOU5から出力されるべきであることが示されている。
【0073】
データID「2」のデータは、TRUE(1)からFALSE(0)かの真偽情報であるが、FALSE(0)からTRUE(1)へ、TRUE(1)からFALSE(0)へ変化した時点か、又は100msec毎の一定周期で、データID「5」のデータと組み合わせてIOU5から出力されるべきであることが示されている。
【0074】
データID「3」のデータは、例えば8ビットの数値情報であるが、その数値が所定の閾値P1 以上へと変化した時点の最初の1回のみ出力されるべきであることが示されている。その後数値が閾値P1 以上である期間は出力せずともよい。再度閾値P1 未満に変化した場合は、再度閾値P1 以上へ変化するまでは出力されず、再度変化した場合に最初の1回目のみ出力される。
【0075】
データID「4」のデータは、数値情報であるデータID「10」のデータの値が所定の閾値P2 未満へ変化した時点と、データID「10」のデータの値が所定の閾値P2 未満である期間のみ100msec毎の一定周期でIOU5から出力されるべきであることが示されている。
【0076】
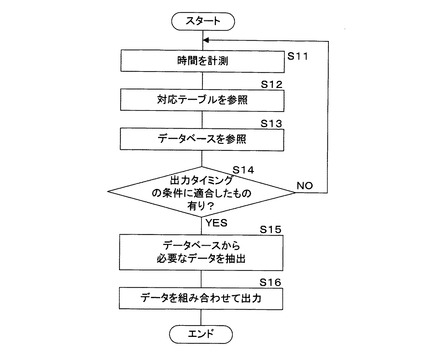
入出力処理部54の処理手順をフローチャートを参照して説明する。図4は、実施の形態1における入出力処理部54による処理手順の一例を示すフローチャートである。
【0077】
入出力処理部54は、出力タイミングには一定周期毎に出力すべきものなどがあるために、内蔵するタイマにより時間を計測する(ステップS11)。入出力処理部54は、対応テーブル55を参照し(ステップS12)、データベース56も参照し(ステップS13)、計測中の時間経過、又はデータベース56におけるデータの変化の有無など、対応テーブル55の出力タイミングの条件に適合したデータがデータベース56に有るか否かを判断する(ステップS14)。
【0078】
入出力処理部54は、出力タイミングの条件に適合したデータがデータベース56に無いと判断した場合(S14:NO)、処理をステップS11へ戻して時間の計測を継続し、ステップS11〜S13の処理を実行する。入出力処理部54は、出力タイミングの条件に適合したデータがデータベース56に有ると判断した場合(S14:YES)、データベース56から該当するデータを抽出し(ステップS15)、複数のデータが必要とされているときはデータを適宜組み合わせて出力し(ステップS16)、処理を終了する。
【0079】
このように、IOU5,5,…が、対応テーブル55に記憶されている出力タイミングに従って、データベース56のデータを出力するから、不要なデータが不要なタイミングでECU3,3へ送信されることがない。例えば、図3に示したデータID「3」のデータは毎回出力されることは必要とされていない。これを用いるECU3,3では、値が閾値P1 以上となった最初のタイミングにしか必要でないのに、値が閾値P1 以上である期間は常に送信されるなどの構成では、必要でないデータがCANバス7に送信されることになり、データの授受は非効率的である。このとき、不要なデータの送受信にCANバス7が使用され、データの授受に遅延が発生する一因となり得る。しかしながら、IOU5,5,…が、ECU3,3が必要とするデータのみ出力することにより、データの授受は効率化される。
【0080】
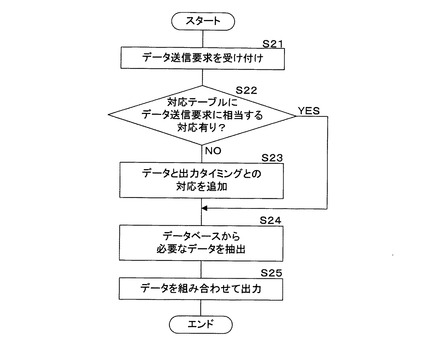
なお、IOU5,5,…は、ECU3,3からのデータ送信要求に応じて対応テーブル55の内容を更新してもよい。図5は、実施の形態1における入出力処理部54が対応テーブル55を更新する処理手順の一例を示すフローチャートである。ECU3,3,…は、CANのリモートフレームを送信するなどにより、必要なデータの送信を当該データを出力できる他のCAN通信ノードへ要求することができる。以下の処理は、IOU5の通信部51により当該リモートフレームが受信されたことを契機に実行される。
【0081】
入出力処理部54は、通信部51によりCANバス7を介して送信されたデータの送信要求が受信された場合、これを受け付ける(ステップS21)。入出力処理部54は、対応テーブル55を参照し、ステップS21にて受け付けたデータの送信要求に相当する対応が有るか否かを判断する(ステップS22)。
【0082】
入出力処理部54は、ステップS22にて無いと判断した場合(S22:NO)、データの送信要求に係るデータの識別情報(データID)と、当該データの出力タイミングとの対応を対応テーブル55に追加する(ステップS23)。これにより、対応テーブル55はECU3,3からの最新の要求に対応して更新される。
【0083】
入出力処理部54は、データの送信要求に応じてデータベース56から必要なデータを抽出し(ステップS24)、複数のデータが必要とされているときはそれらのデータを適宜組み合わせて出力し(ステップS25)、処理を終了する。
【0084】
ステップS22にて有ると判断された場合(S22:YES)、入出力処理部54は、対応テーブル55はそのままで、必要なデータをデータベース56から抽出して(S24)、必要な場合にはデータを組み合わせ、データを出力し(S25)、処理を終了する。
【0085】
なお、ECU3,3からのデータの送信要求に応じて対応テーブル55に対応を追加して更新するのみならず、異なる出力タイミングとすべき場合には、対応テーブル55の一部を消去して更新するなどの処理を行なってもよい。
【0086】
このように、予め対応テーブル55に記憶させていたデータの識別情報と出力タイミングとの対応のみならず、ECU3,3からの新たな要求に対しても対応を対応テーブル55に追加することにより、その後ECU3,3への出力が効率化される。例えば、車載制御システムが配設された後、新たにECU3がプラグインされた場合に、対応テーブル55をIOU5自身で書き換えることができ、システムの変更に柔軟に対応することが可能である。
【0087】
実施の形態1では、車載制御システムはIOU5,5,…を4つ含む構成とし、各IOU5,5,…は夫々記憶部52にデータベース56を記憶する構成とした。記憶部52のデータベース56の内容を定期的に相互に同期させる処理を行なってもよい。この場合、CANバス7は定期的に、データベース56の内容を同期する処理に占有され、各IOU5,5,…は、データベース56に記憶しているデータを他のIOU5,5,…へ送信し、データベース56の内容が共有化される。これにより、IOU5,5,…から夫々アクチュエータ2,2,…にデータを与える場合、異なるIOU5,5,…から出力されるデータの内容は同一である。この場合、同期が完了するまではデータは出力されないので即時性では劣るものの、データの同時性が向上する。
【0088】
実施の形態1においてIOU5は、ASICで構成されるとした。しかしながら、IOU5は、FPGA(Field Programmable Gate Array)により構成されてもよい。
【0089】
(実施の形態2)
実施の形態2では、IOU5,5,…は、ECU3,3、GW4、又は他のIOU5,5,…にて必要なデータが、データベース56に記憶されているデータから演算によって得られるデータである場合、IOU5,5,…にて演算処理を行なってから出力する。
【0090】
図6は、実施の形態2におけるIOU5の内部構成を示すブロック図である。実施の形態2に示すように、IOU5の構成は、演算部57が追加されていること以外は、実施の形態1における構成と同様である。車載制御システムの全体構成も、実施の形態1と同様であるため、共通する構成については実施の形態1と同一の符号を付して詳細な説明を省略する。
【0091】
演算部57は、記憶部52のデータベース56にアクセスすることが可能であり、データベース56に記憶されている特定のデータに対して特定の演算処理を行なうべく構成されている。演算処理の結果得られた数値情報、又は真偽情報などのデータは、入出力処理部54により直接的に通信部51から、当該データを必要とするECU3,3、GW4、又はIOU5,5,…へ送信する。これにより、データを必要とするECU3,3、GW4又はIOU5,5,…にて演算せずともよいから、処理負荷を軽減することができる。
【0092】
演算部57は、演算処理の結果得られたデータをデータベース56に記憶してもよい。これにより、入出力処理部54はデータベース56から抽出することによって演算結果のデータをECU3,3、GW4、又は他のIOU5,5,…へ送信することが可能である。演算処理の結果のデータをデータベース56に記憶することにより、IOU5内における処理回路53a,53b,53c,53dも、演算処理の結果を用いてアクチュエータ2,2の動作を制御することが可能である。
【0093】
なお、演算部57による演算内容は、対応テーブル55に含まれてもよい。例えばデータID「4」のデータについては、データID「10」のデータ値がP2 未満であるか否かによって出力するかのみならず、データID「10」のデータ値をデータID「4」のデータ値に乗算させた結果を出力するとしてもよい(図3参照)。また、夫々演算式が含まれていてもよい。この場合、対応テーブル55の更新により、演算部57による処理内容を変更することができる。
【0094】
(実施の形態3)
実施の形態1及び2では、IOU5,5,…は、CAN通信が可能な通信部51を備えてCANバス7に直接的に接続される構成とした。しかしながら、IOU5は通信部51を備えずともよく、信号線6によりECU3,3に接続されて、CANバス7における通信はECU3,3にて実現される構成としてもよい。
【0095】
図7は、実施の形態3における車載制御システムの構成を示す構成図である。実施の形態3における車載制御システムのセンサ1,1,…、及びアクチュエータ2,2,…の配置は実施の形態1と同様である。また、ECU3,3,…及びGW4がCANバス7に接続されていることも実施の形態1と同様である。ECU3,3,…及びGW4の機能も実施の形態1と同様である。共通する構成は実施の形態1と同一の符号を付して詳細な説明を省略する。
【0096】
図7に示すように、実施の形態3では、センサ1,1,…、及びアクチュエータ2,2,…はIOU8,8,…に接続されている。IOU8,8,…の配置は実施の形態1のIOU5,5,…と同様であるが、IOU8,8,…はCANバス7での通信を行なう機能を持たず、ECU3,3,…を介してCANバス7に接続されている点が異なる。IOU8,8,…は、ECU3,3,…に信号線6により接続されている。一のIOU8は、他のIOU8と信号線6を介して接続されている。
【0097】
これに応じて、ECU3は、マイクロコンピュータ(以下、マイコン)を用いて構成されている場合にはマイコンのI/Oなど、入出力部、またはシリアル通信部などによりIOU8と信号を入出力することができるようにしてある。そしてECU3は、IOU8から出力されるデータの信号を受け付けた場合、自身が備えるCANコントローラ及びトランシーバの機能によりCANフレームにデータを載せてCANバス7へ送信する。
【0098】
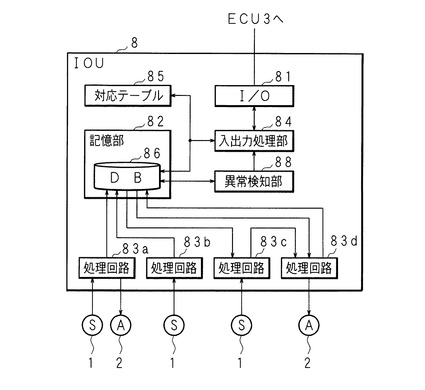
以下、実施の形態3におけるIOU8,8,…の内部構成及び処理について説明する。図8は、実施の形態3におけるIOU8の内部構成を示すブロック図である。IOU8は、実施の形態1におけるIOU5同様にASICにより構成され、ECU3との信号の入出力をするためのI/O81と、記憶部82と、処理回路83a,83b,83c,83dと、入出力処理部84と、対応テーブル85とを備える。記憶部82には、データベース86が記憶されている。更に、実施の形態3におけるIOU8は上述の構成部に加えて、データベース86のデータ群の内容に基づいて異常を検知する異常検知部88を備えている。
【0099】
記憶部82、処理回路83a,83b,83c,83d、入出力処理部84、対応テーブル85、及びデータベース86は、実施の形態1におけるIOU5の記憶部52、処理回路53a,53b,53c,85d、入出力処理部54、対応テーブル55、データベース56の構成及び機能が同じであるので、詳細な説明を省略する。
【0100】
I/O81は、ECU3とのインタフェースである。I/O81は、ECU3へのデータ、又は要求などを示す信号の送信を実現する。入出力処理部84は、対応テーブル85に基づき、データベース86からデータを抽出してI/O81によりECU3へ送信する。ECU3が他のECU3から受信したCANフレームから抽出したデータ、又はデータの送信要求をIOU8へ出力した場合、IOU8はI/O81によりこれを入力し、データである場合はデータベース86に記憶し、データの送信要求であった場合は、当該送信要求に応じたデータの送信処理を行なう。
【0101】
このようにIOU8は、通信手段を必ずしも持たずともよい。ECU3では、IOU8から出力されたデータに、対応するCANのIDを付加してCANフレームに載せてCANバス7へ送信する。これにより、ECU3にてフレームの出力タイミングの調整処理を行なわずともよい点で、処理負荷が軽減される。このとき、IOU8ではASICにより処理を行なう構成であるからIOU8における処理は高速である。
【0102】
異常検知部88は、異常検知処理をすべく構成された回路である。異常検知部88は、データベース86にアクセスが可能であり、入出力処理部84とも接続されている。異常検知部88は、データベース86の内容を総合的に判断して、車両内外の状況に対する異常、車両内に配置されている各装置の異常、及び、センサ1,1,…、又はアクチュエータ2,2,…の動作状態の異常を検知する。例えば、データベース86に記憶されているデータの内のいずれかが、外気温度を示す数値情報である場合、数値情報が80℃に対応するときは、IOU8の異常検知部88が異常を検知する。この場合、車両内に搭載される温度センサが異常である可能性がある。この場合、ECU3へ外気温度のデータを出力してECU3で判断させるまでもない。
【0103】
異常検知部88は内蔵するメモリに、異常検知対象の特定のデータに対する異常検知条件、例えば閾値を記憶しておく。異常検知部88は、一定時間が経過する都度、データベース86の内容を参照し、特定のデータの数値情報と閾値との大小の比較に基づいて異常を検知する。また、複数の特定のデータの内容に基づいて異常状態をより細かく設定してもよい。例えば異常検知部88は、複数の特得のデータの内の一のデータが真偽情報であって、他のデータが数値情報である場合、前記一のデータがFALSEであって、数値情報が所定の閾値以上であるときは異常が予見されるなどと異常を検知してもよい。このような判断で、アクチュエータ2,2,…のいずれかの動作状態の異常を検知できる。更に、上述の例における外気温度を示す数値情報について時間を経た変化率が所定の閾値以上であるか否かにより、異常を検知することも可能である。
【0104】
異常検知部88は、上述のように種々の方法にて異常を検知、又は異常が予見されると検知した場合、入出力処理部84に通知する。入出力処理部84は、異常検知部88から通知を受けた場合、エラー発生を示すエラー通知をI/O81によりECU3へ出力する。これにより、ECU3からエラー通知が他のECU3,3,…へ送信され、車載制御システム全体で異常を検知することが可能である。なお、異常検知部88は、異常であること及び異常コードなどを示す診断データをデータベース86に記憶し、入出力処理部84によりECU3へ出力することを可能としてもよい。
【0105】
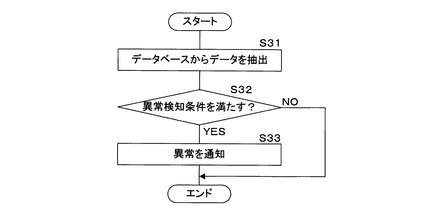
図9は、実施の形態3におけるIOU8による異常検知の処理手順の一例を示すフローチャートである。異常検知部88は、一定時間が経過する都度に、以下に示す処理を行なう。
【0106】
異常検知部88は、データベース86から異常検知対象のデータを抽出し(ステップS31)、抽出したデータの数値情報又は真偽情報が、内蔵するメモリに記憶してある異常検知条件を満たすか否かを判断する(ステップS32)。異常検知部88は、異常検知条件を満たさないと判断した場合(S32:NO)、そのまま処理を終了する。異常検知部88は、異常検知条件を満たすと判断した場合(S32:YES)、異常を入出力処理部84へ通知し(ステップS33)、処理を終了する。
【0107】
このように、センサ1,1,…及びアクチュエータ2,2,…などの機器が集約されて直接的に接続されているIOU8にて、データベース86に各機器から得られるセンサ情報、制御状態を示す情報などのデータが記憶されるから、各データを総合的に監視して異常を検知することができる。ECU3,3,…は、IOU8,8,…により出力され、他のECU3,3,…からも送信されるデータに基づいて異常を検知することはできる。特にGW4は、複数のCANバス7に接続され、前記複数のCANバス7,7に接続されている全ECU3,3,…からのデータを取得できるから、データを集約して記憶しておくことにより、より総合的に判断することができる。しかしながら、同一のIOU8に接続されているセンサ1,1,…及びアクチュエータ2,2,…についての異常検知については、ECU3,3,…、又はGW4が各機器からデータを集めて異常か否かを判断するよりも、IOU8にて異常を検知する方が即時性も向上し、ECU3,3,…又はGW4の処理負荷も軽減される。
【0108】
実施の形態2におけるIOU8の異常検知部88は、内蔵するメモリに異常検知条件を記憶しておき、異常検知の監視対象である特定のデータと異常検知条件とを比較して異常であるか否かを判断する構成とした。しかしながら、本発明における異常検知はこれに限らず、例えば対応テーブル85に異常検知条件を付加して記憶しておく構成としてもよい。この場合、対応テーブル85は書き換え可能であるから、異常検知条件を柔軟に変更できる。このとき異常検知部88は、対応テーブル85を参照することが可能に構成され、データベース86と対応テーブル85の異常検知条件とを比較して異常を検知する。
【0109】
なお、実施の形態2においてIOU8,8,…と、センサ1,1,…、及びアクチュエータ2,2,…との間、及びIOU8,8,…との間は信号線6のみならず、LINなどのネットワークでもよい。
【0110】
(実施の形態4)
実施の形態1乃至3では、IOU5又はIOU8はASICにより構成されてハードウェア的に各処理を行なう構成とした。ハードウェア的な構成により、複数の機器、即ちセンサ1,1,…及びアクチュエータ2,2,…からの入出力を各処理回路53a,53b,53c,53d(83a,83b,83c,83d)にて並行的に処理でき、IOU5(IOU8)における処理を高速化できた。しかしながら本発明はこれに限らず、IOUは、マイコンを用いて制御プログラムに基づいて動作する構成としてもよい。
【0111】
実施の形態4では、IOUをマイコンを用いて実現する。IOUの内部構成以外の車載制御システムの構成は、実施の形態1における構成と同様であるため、説明を省略する。以下、マイコンでIOUを実現する場合の例について説明する。
【0112】
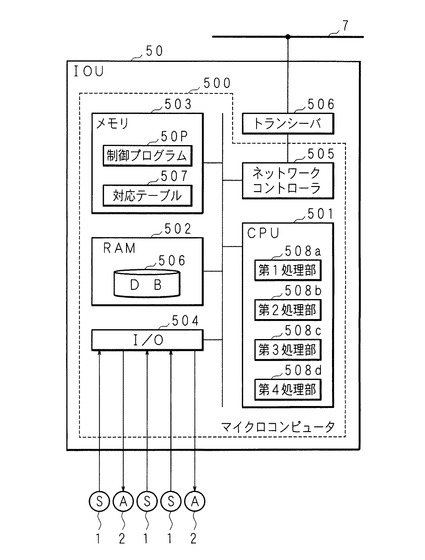
図10は、実施の形態4におけるIOU50の内部構成を示すブロック図である。IOU50は、CPU501、RAM502、メモリ503、I/O504、ネットワークコントローラ505を含むマイクロコンピュータ(マイコン)500と、通信用のトランシーバ506とを備える。
【0113】
RAM502は、SRAM、DRAMなどを用い、データベース506が記憶されている。メモリ503は、フラッシュメモリ、EEPROM(Electronically Erasable and Programmable Read Only Memory )などの不揮発性メモリを用いる。メモリ503には、コンピュータをIOUとして動作させるための制御プログラム50Pと、対応テーブル507が記憶されている。
【0114】
マイコン500のCPU501は、メモリ503に記憶されている制御プログラム50Pに基づく処理を実行する。これにより、CPU501は、実施の形態1乃至3における入出力処理回路54(84)としての機能を実現する。また、CPU501は、制御プログラム50Pに基づき、実施の形態1乃至3における処理回路53a,53b,53c,53d(83a,83b,83c,83d)の機能を夫々、第1処理部508a,508b,508c,508dとして実現する。
【0115】
I/O504はマイコンのインタフェースであり、各センサ1,1,…、アクチュエータ2,2,…が夫々信号線により接続される。センサ1,1,…及びアクチュエータ2,2,…はI/Oアドレスにて区別される。CPU501の第1処理部508a,508b,508c,508dとしての機能により、夫々対応するセンサ1,1,…又は空く中テータ2,2,…から値が入力されたレジスタを参照してデータベース506に記憶する。
【0116】
ネットワークコントローラ505は、マイコンのCAN通信を実現し、与えられた信号からCANフレームを作成してトランシーバ506へ与えてCANバス7を介した通信を実現する。ネットワークコントローラ505及びトランシーバ506にて、実施の形態1のIOU5の通信部51に対応する。CPU501は、メモリ503の対応テーブル507の出力タイミングに基づいてデータベース506から抽出したデータをネットワークコントローラ505及びトランシーバ506によりECU3,3,…、GW4、又は他のIOU50,50,…へ送信する。また、CPU501は、ネットワークコントローラ505及びトランシーバ506によりECU3,3,…、GW4、又は他のIOU50,50,…から受信したデータをデータベース506に記憶する。
【0117】
その他、CPU501の入出力処理部としての機能は、実施の形態1と同様であるから詳細な説明は省略する。勿論、CPU501は、実施の形態3における異常検知部88としての機能を発揮してもよい。このように、IOU50は、マイコンを用いた構成でも実現することが可能である。
【0118】
実施の形態4では、IOU50を全体としてマイコン制御とする構成とした。しかしながら、入出力処理部、及び通信部の機能は実施の形態4のようにマイコン制御とし、第1〜第4処理部(508a〜508d)の処理は、実施の形態3のように処理回路53a,53b,53c,53dにより実現する構成としてもよい。
【0119】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0120】
1 センサ(機器)
2 アクチュエータ(機器)
3 ECU(制御装置)
5 IOU(入出力装置)
52 記憶部
53a,53b,53c,53d 処理回路
54 入出力処理部(出力手段)
55 対応テーブル
56 データベース
50 IOU(入出力装置)
501 CPU(出力手段)
502 RAM(記憶部)
506 データベース
507 対応テーブル
8 IOU
82 記憶部
83a,83b,83c,83d 処理回路
86 データベース
88 異常検知部(異常検知手段)
【技術分野】
【0001】
本発明は、複数の機器と、該複数の機器からの情報を使用して機器の制御を行なう制御装置との間で前記複数の機器の制御装置に対する入出力を処理する入出力装置に関する。特に、各機器から入力されるデータをデータベースとして集約して記憶しておくことでデータの出力タイミングなどを適宜調整することなどを可能とし、データの授受の高速化及び効率化、機器の制御を行なう制御装置における処理負荷の軽減を図ることができる入出力装置に関する。
【背景技術】
【0002】
近年では、多数の機器を制御して、全体として多様な機能を実現させる制御システムが普及している。機器には夫々制御装置が接続され、更に各制御装置に通信手段を設けて相互にデータを交換させ、個々の制御装置が独立した制御を行なうのではなく、他の制御装置などを介して得られるデータに基づいて自身に対応する制御対象の機器を制御するなど、連携して制御を実行する制御システムが各分野で利用されている。
【0003】
このような制御システムでは、機能の増加に伴ない、制御対象の機器の数も増加すると共に、制御に用いるデータを取得、又は測定するセンサなどの機器の数も増加する。
【0004】
特に車両の分野では、各種機能に対応するアクチュエータ又はセンサなどの機器が多数車内に配され、各機器を制御する制御装置としてECU(Electronic Control Unit)が各々に対応して配されて動作している。車両の制御は機械的制御から電気的制御へ移行しつつあり、更に、制御システムによって実現される機能の特化、実現できる機能の増加及び多様化が進んでいる。これにより、車両に搭載されるアクチュエータ、センサなどの機器が増加している。
【0005】
このように、制御対象の機器、又は制御に用いるデータを取得するセンサなどの機器の数は増大する。機器の数が増大した場合、各機器に各々制御装置が対応する構成では、制御装置の数も増大して相互の通信における通信負荷が重くなるなどの事態が考えられる。この場合、データの送受信の遅れの発生の問題、又は、ほぼ同時に受信することが期待されるデータの受信タイミングに時間差が生じるなどの問題が起こる。
【0006】
図11は、制御システムの典型的構成と、各ECUから送信されるデータの内容及びデータを必要とするタイミングとを模式的に示す説明図である。図11に示す制御システムは、ECU91,92,93,94を含む。ECU91,92,93,94はいずれも通信線95にバス型に接続され、相互に通信することが可能である。
【0007】
ECU91には、図示しない1又は複数のセンサが接続されており、ECU91はセンサから得られるデータを一定周期で送信するようにしてある。ECU92には、図示しないアクチュエータが接続されており、ECU92がアクチュエータの動作を制御するようにしてある。ECU93は、判定処理などを行なうようにしてある。ECU94にも図示しない1又は複数のセンサが接続されており、ECU94はセンサから得られるデータを一定周期で送信するようにしてある。
【0008】
例えば、ECU91は、センサにて得られるデータに基づき、ECU92,93,94が必要とするデータを組み合わせてフレームAとして通信線95へ送信するようにしてある。このときECU92は、ECU91からのデータを50msec(ミリ秒)の周期で必要とし、ECU93はECU91からのデータを20msecの周期で必要とし、ECU94はECU91からのデータを60msecの周期で必要としているとする。この場合、ECU91は、最も短い周期の20msecにてフレームAを送信する。ECU94も、センサにて得られるデータに基づき、ECU91,92が必要とするデータを組み合わせてフレームBとして通信線95へ送信するようにしてある。ECU94は、ECU91,92の内のいずれかがフレームBを必要とする周期20msec及び50msecの内、最も短い20msecにてフレームBを送信するようにしてある。
【0009】
ECU92は、フレームA及びフレームBに含まれるデータと、自身が保有するデータとを用いた演算処理の結果に基づいてアクチュエータの動作を制御するようにしてある。フレームAのデータとフレームBのデータとがほぼ同時に得られたデータである場合、演算結果の精度が高まるから、同時に得られたデータであることが望ましい。例えば、フレームAに含まれるデータとフレームBに含まれるデータとが、50msec程度異なるタイミングにて夫々センサからの入力に基づき得られたデータである場合、データの内容によっては演算結果の精度が低く制御に不適となる問題がある。
【0010】
更にこの場合、ECU94は、フレームAを60msecの周期にて受信できればよいにも拘わらず、ECU93が必要とする周期である20msec毎にフレームAを受信する。つまり、ECU94としては同一の内容のデータを不要に多く受信することになる問題がある。
【0011】
他の例として、ECU91がセンサにて得られるデータを送信するに際し、ECU92は当該データを高精度のデータで必要とし、ECU93,94は低精度のデータで十分であるとし、しかもECU92,93,94が当該データを必要とする周期は図11に示すように異なる場合を考える。具体的には、ECU92はアクチュエータの制御のために、ECU91がセンサにて得られるデータを16ビットの精度で必要とするが、ECU93,94は同じデータを8ビットの精度で必要とする。この場合、ECU91が当該データを8ビットのデータにする演算後に16ビットの精度のデータと共にフレームCとして送信するのか、又は16ビットの精度のデータのみをフレームCとして送信し、ECU93,94が夫々演算して用いるのか、両方の構成が考えられる。どちらの構成が好ましいかは、通信線95における通信量の節減と、各ECU91,92,93,94における演算負荷とのいずれを、システムにおける優先事項にするかによって定まる。
【0012】
このような各種問題に対して、制御システム全体で各ECUが必要とするデータの送受信タイミング、通信量等を最適化するためには、フレームにいずれのデータをどれ程の精度で含めて送信するのか、そしてそのフレームをどのような周期で各ECUから送信させるのかを設計することが重要である。しかしながら、制御システムに含まれるセンサ、アクチュエータ、及びそれらに対応するECUの数の多さから、データの種類も膨大になり、設計は非常に複雑であり、設計工程に多大な労力がかかる。
【0013】
一方、車両におけるECUを利用した制御システムでは、ワイヤー・ハーネスの肥大化、システムの構成部品点数の増加といった問題から、センサ、アクチュエータなどの機器との間の入出力を集約する構成が提案されている(特許文献1、2など)。また、ECUの数は上述のように増大しており、且つ1つの通信線に接続されるECUの数がリンギング防止などの問題から限られるから、通信線の数が増加する。車両の分野では特に、燃費の改善及び環境への影響を考慮して車両全体の軽量が重要な課題となっている。軽量化には通信線、信号線、電源線などの各種電線を含むワイヤハーネスの軽量化が大きく影響するので、各種電線自体の軽量化及び省線化が望まれている。
【0014】
特許文献1では、入出力装置が各機器から得たデータを多重化して制御装置である車載ECUへ伝送する構成とすることにより、省線化を図っている。特許文献2では、通信により多重化したデータを送信する構成をシフトレジスタを用いて出力する構成とすることにより、ECUの部品点数を削減して小型化できる入出力装置が提案されている。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開平7−95659号公報
【特許文献2】特開2008−296871号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
特許文献1、2に開示されているように、複数の機器から出力されたデータに対する演算を共通の演算手段で行ない、更に情報を多重化してECUへ通信により伝送するか、又はシフトレジスタを介して出力する構成により、通信線、信号線の削減を図ることができる。
【0017】
特許文献1、2に開示されている構成では、センサなどから得られたデータをまとめて出力することができるものの、それらのデータを出力するタイミングをECUからの要求に応じて適宜調整することは考慮されていない。したがって、例えば入出力装置から各データをECUへ出力するタイミングは、センサなどから出力されたタイミングであろうと推測される。データの多重化についても、ECUが必要とするデータを組み合わせることを考慮していることは示唆されていない。このように、ECUが必要とするデータ、必要とするタイミングに応じたデータの授受の最適化のためには依然として、多大な労力をかけて入出力のタイミング及びフレームの設計を行なう必要がある。
【0018】
本発明は斯かる事情に鑑みてなされたものであり、制御システムを構成する複数の機器と各機器の制御装置との間でデータの入出力を処理する入出力装置が、一旦各機器からのデータを記憶しておき、適宜、制御装置からの必要に応じてデータの授受を実行することにより、システムの省線化を図ると共に、制御装置における処理負荷は軽減しつつも、制御システム全体におけるデータの授受の高速化及び効率化を図ることができる入出力装置を提供することを目的とする。
【課題を解決するための手段】
【0019】
第1発明に係る入出力装置は、データを入力又は出力する複数の機器と、いずれかの機器からのデータを使用するか、又は機器へデータを与えることにより機器を制御する1又は複数の制御装置との間に接続され、前記複数の機器の前記1又は複数の制御装置への入出力を処理するようにしてある入出力装置において、入出力されるデータを記憶するための記憶部を備え、該記憶部に前記複数の機器のいずれかから入出力されるデータをデータベース形式にて記憶する手段と、前記データベースに記憶されている1又は複数のデータに基づき、前記制御装置から必要とされるデータを必要とされるタイミングにて出力する出力手段とを備えることを特徴とする。
【0020】
第2発明に係る入出力装置は、前記制御装置から必要とされるデータの識別情報と、前記データが前記制御装置から必要とされる出力タイミングとの対応を示す対応テーブルを備え、前記出力手段は、前記対応テーブルの識別情報及び出力タイミングに基づいて、前記データベースからデータを読み出して出力するようにしてあることを特徴とする。
【0021】
第3発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータの変化の有無を判断する手段を備え、該手段が有と判断した場合に変化後のデータを出力するようにしてあることを特徴とする。
【0022】
第4発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータと所定値との比較に基づき前記データを出力するようにしてあることを特徴とする。
【0023】
第5発明に係る入出力装置は、前記出力手段は、前記制御装置から必要とされるデータを複数組み合わせて出力するようにしてあることを特徴とする。
【0024】
第6発明に係る入出力装置は、前記制御装置からのデータ出力要求を受け付ける手段と、前記データ出力要求に応じて前記データベースからデータを抽出して出力する手段と、前記データ出力要求に基づき前記対応テーブルを更新する手段とを備えることを特徴とする。
【0025】
第7発明に係る入出力装置は、前記制御装置から必要とされるデータを、前記データベースに記録されている1又は複数のデータを用いた演算により求める演算手段を備え、前記出力手段は、演算により求めたデータを出力するようにしてあることを特徴とする。
【0026】
第8発明に係る入出力装置は、前記演算手段により求めたデータを前記データベースに記憶するようにしてあることを特徴とする。
【0027】
第9発明に係る入出力装置は、前記データベースに記憶されているデータを、前記複数の機器の内のいずれか特定の機器へ該特定の機器の動作を制御すべく出力する手段を備えることを特徴とする。
【0028】
第10発明に係る入出力装置は、接続されている複数の機器夫々に対応して特定の処理を行なうべく構成される複数の処理回路を備え、前記複数の処理回路は夫々、前記データベースにデータを記憶し、又は前記データベースからデータを抽出する手段を備えることを特徴とする。
【0029】
第11発明に係る入出力装置は、前記複数の処理回路の内の一部又は全部は、対応する機器から出力されたデータに基づき他のデータを求める演算処理を行ない、演算結果に基づき制御データを他の機器に対応する処理回路へ出力する手段を備えることを特徴とする。
【0030】
第12発明に係る入出力装置は、前記複数の処理回路の内の一部又は全部は、前記データベースに記憶されているデータに基づき、対応する機器の動作の停止又は起動を制御する手段を備えることを特徴とする。
【0031】
第13発明に係る入出力装置は、前記複数の機器が夫々、入力又は出力するデータに基づき、異常を検知する手段を備えることを特徴とする。
【0032】
第1発明では、複数の機器及び機器を制御する制御装置との間の入出力を処理する入出力装置にて、各機器又は制御装置からのデータを一旦データベースの形式にて集約して記憶しておく。データベースに集約されて記憶されていることにより、入出力装置は機器から出力されたタイミングで逐次制御装置へデータを出力するなどのように各機器と制御装置との間の入出力を中継するのみならず、適宜、制御装置が必要とするデータを必要とするタイミングとなるように調整してデータを出力することが可能である。これにより、必要なデータのみの授受となるので、無用なデータの授受、授受されるデータ量の節減など効率化、最適化を図ることができる。また、制御装置は複数の機器又は他の装置から夫々任意のタイミングで出力されるデータの入出力のタイミングの調整処理、データの時間精度の判定処理を行なうことなく制御処理のみに専念できる。
【0033】
第2発明では、対応テーブルに基づき、データベースに集約されて記憶されているデータが適宜出力される。制御装置が必要とするデータと必要とされるタイミングとの明確な対応に基づいて出力されるから効率的なデータの授受を実現することが可能である。
【0034】
第3発明では、制御装置が必要とするデータが、当該データの内容が変化したデータである場合、入出力装置にてその必要に応じて変化が有った場合に出力される。制御装置は不要に同じデータを受け続ける必要が無い。これにより、データの授受は効率化され、制御装置の処理負荷は軽減される。
【0035】
第4発明では、制御装置が必要とするデータが、所定の閾値よりも大きい又は小さいかなどの所定の条件を満たしたデータである場合、入出力装置からは、その必要に応じて所定の条件を満たした場合のみ出力される。制御装置は不要にデータを受けずともよい。これにより、データの授受は効率化され、制御装置の処理負荷は軽減される。
【0036】
第5発明では、制御装置が演算処理、判定処理などのために、機器が出力する複数のデータを必要とする場合、該複数のデータは、入出力装置にて夫々任意のタイミングと任意の精度に調整された上で組み合わせられ、制御装置へまとめて出力される。制御装置は入出力装置から出力されたままのデータを用いて処理を行なえばよい。またこの場合、制御装置は必要な複数のデータを同時に取得することが可能である。
【0037】
第6発明では、制御装置から明示的にデータの出力要求がされた場合、入出力装置は当該出力要求に応じてデータを出力すると共に、記憶してあるテーブルに要求されたデータ及び要求されるタイミングにより対応テーブルを更新する。したがって、新たに加わった制御装置がある場合であっても、データの授受をより効率化することができる。
【0038】
第7発明では、制御装置が必要とするデータが、各機器から得られる複数のデータに基づく演算処理により得られるデータである場合、入出力装置にて演算が行なわれて出力される。これにより、全てのデータを授受させることなしに、制御装置で必要とされるデータのみを授受してデータの授受を効率化、最適化することができると共に、制御装置にて演算処理を省略することができ、制御装置の処理負荷を軽減させることが可能である。
【0039】
第8発明では、第7発明において、制御装置が必要とするデータが演算処理により得られるデータである場合に、入出力装置が演算を肩代わりするのみならず、その結果がデータベースに記憶される。これにより演算結果も必要に応じて利用できる。
【0040】
第9発明では、入出力装置が、データベースのデータに基づき機器の動作を制御すべくデータを機器へ出力する。制御装置から出力される制御データが、任意のタイミングで出力されるとしても、データベースに一旦記憶されるから、制御装置が出力タイミングを調整せずとも、入出力装置における処理によって適宜、制御対象の機器へ制御データを適したタイミングで出力して制御することが可能である。
【0041】
また第9発明では、各機器と制御装置との間で入出力されるデータがデータベースに集約されているから、一の機器からのデータと、データベースに記憶されているデータとに基づいて他の機器が制御される場合、前記一の機器からのデータを制御装置へ出力するまでもなく、入出力装置内で、前記一の機器からのデータとデータベースに記憶されているデータとに基づく制御データを生成することも可能である。これにより、制御装置への不要な出力をせずにデータの授受を効率化できると共に、制御装置の処理負荷を軽減することもできる。
【0042】
第10発明では、入出力装置に接続されている機器夫々に対応する処理回路が備えられ、各処理回路がデータベースからのデータの抽出、データの記憶処理などを行なう。このように処理回路を並列構成とすることにより、高速化を図ることができる。
【0043】
第11発明では、第10発明における各機器に対応した処理回路の一部又は全部は、いずれかの機器の制御に用いられる制御データを求める演算処理を行なうことが可能に構成されており、当該機器に対応する処理回路へ制御データを出力する。当該演算により得られた制御データはデータベースに記憶され、制御装置が必要とする場合は出力されてもよい。入出力装置内で制御データをも作成して各機器を制御することにより、不要にデータを制御装置へ出力することもなく入出力されるデータ量を節減できると共に、制御装置における演算の結果を待たずに高速に制御を行なうことも可能である。
【0044】
第12発明では、第10又は第11発明における処理回路は夫々、データベースに記憶されている所定のデータの内容に応じて停止又は起動する。これにより、制御システムの状態が総合的に所定の状態であるときには、接続される各機器に対する処理さえも停止させるなど、状態に応じてより複雑な演算、動作の制御を実行することが可能となるほか、電力消費量も抑えることができる。
【0045】
第13発明では、入出力装置は各機器及び制御装置にて入出力されるデータをデータベースに集約して記憶しているから、データベース全体のデータの内容、例えば数値情報又は真偽情報を総合的に考慮して異常を検知することが可能である。入出力装置が各機器からの各データを制御装置へ逐次出力して制御装置にて異常を検知する構成よりも、入出力されるデータ量も節減されて効率的である。また、入出力装置により複数の機器が一元管理されるため、夫々の機器のデータから異常状態をより詳細に識別することもできる。
【発明の効果】
【0046】
本発明による場合、アクチュエータ、センサなどの各機器と、センサから出力されるデータに基づいてアクチュエータに制御データを与えて制御する制御装置とを含む制御システムで、各機器と制御装置との間の入出力が入出力装置に集約されることで、通信線、信号線等を削減することができるのでシステムの省線化を図ることができる。
【0047】
更に、入出力装置にて、制御装置が必要とするタイミングで必要なデータが適宜出力されるので、制御装置はデータを好ましいタイミングで取得して処理を行なうことができ、制御装置がタイミングを見計らって他の制御装置へ送信するなどの処理を行なう必要がなくなる。制御システム全体におけるデータの授受の効率化、最適化が為されて、データ量の節減ができることから、データの授受の高速化も実現できる。
【0048】
入出力装置は、データベースにより各機器の状態の変化、制御装置からの要求の変化を認識することができるため、その状況に応じて動作を変更でき、各機器の制御方法の変更、制御装置がデータを必要とするタイミングを変更することができる。
【0049】
また、各機器又は制御装置からデータを集約して記憶している入出力装置が行なうことで効率化される処理は、入出力装置にて行なわれる。これにより、制御装置における処理負荷を軽減させることができる。
【図面の簡単な説明】
【0050】
【図1】実施の形態1における車載制御システムの構成を示す構成図である。
【図2】実施の形態1におけるIOUの内部構成を示すブロック図である。
【図3】対応テーブルの内容例を示す説明図である。
【図4】実施の形態1における入出力処理部による処理手順の一例を示すフローチャートである。
【図5】実施の形態1における入出力処理部が対応テーブルを更新する処理手順の一例を示すフローチャートである。
【図6】実施の形態2におけるIOUの内部構成を示すブロック図である。
【図7】実施の形態3における車載制御システムの構成を示す構成図である。
【図8】実施の形態3におけるIOUの内部構成を示すブロック図である。
【図9】実施の形態3におけるIOUによる異常検知の処理手順の一例を示すフローチャートである。
【図10】実施の形態4におけるIOUの内部構成を示すブロック図である。
【図11】制御システムの典型的構成と、各ECUから送信されるデータの内容及びデータを必要とするタイミングとを模式的に示す説明図である。
【発明を実施するための形態】
【0051】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。なお、以下に示す実施の形態では、車両に搭載されている多数のアクチュエータ、センサ及びECUを含む車載制御システムに本発明に係る入出力装置を用いた例を挙げて説明する。
【0052】
(実施の形態1)
図1は、実施の形態1における車載制御システムの構成を示す構成図である。車載制御システムは、車両の前部に搭載された温度センサ若しくはカメラ、タイヤの軸に取り付けられる車輪速センサ、又はヨーレートセンサなどの各種センサ1,1,…と、ヘッドライト、スモールランプ、リアランプ、ドアロックなどボディ系の各種アクチュエータ2,2,…と、各種センサ1,1,…から得られるデータに基づいてアクチュエータ2,2,…の動作を制御するECU3,3と、異なるネットワーク間のデータの授受を中継するGW(Gate Way)4とを含み、更に、各種センサ1,1,…及びアクチュエータ2,2,…と、ECU3,3との間の入出力装置(図示及び以下の説明にてIOU(In-Out Unit:入出力ユニット)という)5,5,…とを含む。
【0053】
各種センサ1,1,…及びアクチュエータ2,2,…は夫々、信号線6,6,…によりIOU5,5,…に接続されている。センサ1,1,…及びアクチュエータ2,2,…間は、LIN(Local Interconnect Network)により通信する構成としてもよい。
【0054】
ECU3,3,…、GW4、及びIOU5,5,…は夫々、CAN(Controller Area Network)バス7に接続されており、相互に制御用のデータを送受信する。実施の形態1ではECU3,3,…、GW4、及びIOU5間の通信のプロトコルはCANとするが、これに限らず、FlexRay(登録商標)等でもよい。一部のIOU5は異なるIOU5に信号線6により接続されている。
【0055】
IOU5,5,…には夫々、車両内で近傍に配置されているセンサ1,1,…とアクチュエータ2,2,…とが接続されている。図1に示す例では、車両前部の左部分に1つのセンサ1と、3つのアクチュエータ2,2,2とが近くに配されており、これらは1台のIOU5に接続されている。また、車両前部中央に配されているセンサ1,1も、同一のIOU5に接続されている。センサ1,1,…及びアクチュエータ2,2,…が、ECU3,3に各々接続される構成でなく、近傍に配置されるIOU5,5,…に接続されて、IOU5,5,…によりECUとの間の入出力が集約されることで、信号線6,6,…の長さも比較的短くて済む点、省線化に効果的である。
【0056】
また、実施の形態1では図1に示すように、センサ1,1,…及びアクチュエータ2,2,…は、各々に対応するECUと接続される構成でなく、IOU5,5,…によって集約されてECU3,3に接続される構成としている。これにより、ECU3,3の統合も容易になるほか、統合によるECU数の削減と、これによるCANバス7の数の削減ができる。この点でも省線化に効果的である。
【0057】
各センサ1,1,…で得られる制御データは、近くに配置されていて同一のIOU5に接続されるアクチュエータ2の動作の制御に用いられるとは限らない。車載制御システムでは、物理的配置における距離と、機能的配置における距離とは異なるからである。例えば、車両の後部に搭載されているセンサ1にて得られる測定値などのデータが前部で動作するアクチュエータの制御に必要である場合がある。また、その測定値のデータが必要なタイミングは、測定値のデータの利用のされ方によっても異なる。例えば、アクチュエータ2の回転数を決定して制御データを求めるためには、測定値データは30msec毎にECU3により必要とされるが、他のアクチュエータ2のオン/オフの切替を決定するためには、100msec毎でよい場合などが考えられる。
【0058】
そこで、実施の形態1におけるIOU5,5,…は、センサ1,1,…及びアクチュエータ2,2,…とECU3との間の入出力を物理的に集約するのみならず、IOU5,5,…から出力される段階で、出力するデータの内容、データの精度などを適宜、当該データを用いるECU3からの必要に応じて調整して出力する。
【0059】
IOU5,5,…にこのような機能を実現させるための構成について説明する。図2は、実施の形態1におけるIOU5の内部構成を示すブロック図である。IOU5はASIC(Application Specific Integrated Circuit:特定用途集積回路)で構成され、CANバス7に接続する通信部51と、記憶部52と、センサ1,1,1及びアクチュエータ2,2夫々に対応して特定の処理を行なうべく構成された処理回路53a,53b,53c,53dと、入出力処理部54と、対応テーブル55とが備えられている。
【0060】
通信部51は、CANバス7を介した通信を実現するためのCANトランシーバ、及びCANコントローラの機能を有し、CANバス7における通信を制御する。通信部51は、後述するように入出力処理部54からデータが与えられた場合、当該データをCANプロトコルの信号(CANフレーム)に載せ、CANトランシーバにて物理層における信号の送信を実現する。また、通信部51は、CANバス7にて他のECU3,3、IOU5、及びGW4から送信されたデータ、データの送信要求などのCANフレームを受信した場合、データを抽出して入出力処理部54へ通知する。
【0061】
記憶部52は、SRAM(Static Random Access Memory)、DRAM(Dynamic Random Access Memory)等のランダムアクセスメモリを用いる。記憶部52には、IOU5に接続されているセンサ1,1,…から出力されたデータ、アクチュエータ2,2,…の動作状態などを示すデータ、後述する処理回路53a,53b,53c,53dのいずれかによる演算結果のデータなどを含むデータベース(DB:Data Base)56が記憶されている。データベース56には、ECU3,3,…、GW4又はIOU5,5,…から送信されて通信部51にて受信することにより入力された制御用のデータも記憶される。
【0062】
処理回路53a,53b,53c,53dは夫々、センサ1又はアクチュエータ2に接続されている。そして、処理回路53a,53b,53c,53dはいずれもデータベース56にアクセスが可能であって、データベース56へのデータの書き込み、又はデータベース56からのデータの抽出が可能である。
【0063】
図2に示す例では、処理回路53aにはセンサ1及びアクチュエータ2が接続されている。処理回路53aは、接続されているセンサ1により得られるセンサ情報に基づき、アクチュエータ2の動作量を演算して直接的にアクチュエータ2の動作を制御するようにしてある。そして処理回路53aは、センサ1により得られたセンサ情報のデータ、及びアクチュエータ2の動作状態を示すデータをデータベース56に書き込む。このとき、センサ1及びアクチュエータ2が夫々、IOU5の処理回路53aによりハードウェア的に処理されるから、ECUで制御する必要が無く、ECUの処理負荷が軽減される。そしてアクチュエータ2の動作状態を示すデータがデータベース56に記憶される。したがって、他のアクチュエータ2の制御のためにECU3,3から当該動作状態を示すデータが必要とされた場合、IOU5が出力することにより、ECU3,3、GW4、及び他のIOU5,5,…でも状況を把握して適宜制御に用いることができる。
【0064】
処理回路53bには、センサ1が接続されている。処理回路53bは、接続されているセンサ1により得られる測定値などのセンサ情報を抽象化してデータベース56に書き込む。例えば、センサ1が車輪速センサである場合、具体的には時間当たりの回転数が物理量として得られるのに対し、処理回路53bは回転数の値を3段階、即ち低速、中速、高速に区別し、夫々に対応する状態を示すデータにしてデータベース56に書き込む。したがって、データベース56で車輪速は、具体的な回転数ではなく低速、中速、又は高速などの抽象化された情報にて記憶される。
【0065】
処理回路53cには、更に別のセンサ1が接続されている。処理回路53cは、接続されているセンサ1により得られる測定値などのセンサ情報と、他のセンサ1からのセンサ情報、例えばCANバス7を介して他のIOU5から送信されてデータベース56に記憶されているセンサ情報とに対する所定の演算処理を行ない、処理回路54dへ演算結果を通知する。
【0066】
処理回路53dには、アクチュエータ2が接続されている。処理回路53dは、処理回路53cからの演算結果と、データベース56から抽出した所定のデータとに基づいてアクチュエータ2の動作量を決定して動作を制御するようにしてある。更に処理回路53dは、アクチュエータ2の動作状態を示すデータをデータベース56に書き込む。
【0067】
処理回路53a,53b,53c,53dは、データベース56の所定のデータの内容に応じて、自身の停止又は起動を制御するように構成されている。例えば、外部からイグニッションスイッチの状態を示すデータが送信された場合、後述するように入出力処理部54は通信部51によりこれを受信してデータベース56に書き込む。例えば処理回路53aは、イグニッションスイッチの状態がアクセサリーオン、イグニッションオン、スタートである場合に起動するように構成され、処理回路53bは、イグニッションオンである場合のみに起動するように構成されている。
【0068】
入出力処理部54も特定の処理をすべく構成された回路で実現され、対応テーブル55、及びデータベース56にアクセスが可能である。入出力処理部54は、対応テーブル55に記憶されているデータの識別情報と、前記データの出力タイミングとの対応に基づき、データベース56からデータを抽出して通信部51を介してECU3,3、及びGW4へデータを送信する。
【0069】
このように、データベース56に記憶されているデータは、IOU5において一元管理の下に直接的に各センサ1,1,…及びアクチュエータ2,2,…から得られているから、各データが更新される時間差を小さくすることができる。したがって、入出力処理部54が、データベース56から複数のデータを抽出して送信する場合、データの同時性も向上する。
【0070】
なお、対応テーブル55は、フラッシュメモリなどの不揮発性メモリを用いる。対応テーブル55には、入出力処理部54が参照することができるように、データの識別情報と、各データの出力タイミングとの対応が予め記憶されている。対応テーブル55の内容は、ECU3,3、GW4、又は他のIOU5,5,…における処理に必要とされるデータと、ECU3,3、GW4、又は他のIOU5,5,…で必要とするタイミングとの対応であり、車載制御システムの設計に応じて予め記憶されるものである。
【0071】
図3は、対応テーブル55の内容例を示す説明図である。図3に示すように、対応テーブル55には、データを識別するデータIDと、データの出力タイミングとの対応が含まれている。
【0072】
例えば、データID「1」のデータは、50msec毎に一定周期でデータベース56から抽出されてIOU5から出力されるべきであることが示されている。
【0073】
データID「2」のデータは、TRUE(1)からFALSE(0)かの真偽情報であるが、FALSE(0)からTRUE(1)へ、TRUE(1)からFALSE(0)へ変化した時点か、又は100msec毎の一定周期で、データID「5」のデータと組み合わせてIOU5から出力されるべきであることが示されている。
【0074】
データID「3」のデータは、例えば8ビットの数値情報であるが、その数値が所定の閾値P1 以上へと変化した時点の最初の1回のみ出力されるべきであることが示されている。その後数値が閾値P1 以上である期間は出力せずともよい。再度閾値P1 未満に変化した場合は、再度閾値P1 以上へ変化するまでは出力されず、再度変化した場合に最初の1回目のみ出力される。
【0075】
データID「4」のデータは、数値情報であるデータID「10」のデータの値が所定の閾値P2 未満へ変化した時点と、データID「10」のデータの値が所定の閾値P2 未満である期間のみ100msec毎の一定周期でIOU5から出力されるべきであることが示されている。
【0076】
入出力処理部54の処理手順をフローチャートを参照して説明する。図4は、実施の形態1における入出力処理部54による処理手順の一例を示すフローチャートである。
【0077】
入出力処理部54は、出力タイミングには一定周期毎に出力すべきものなどがあるために、内蔵するタイマにより時間を計測する(ステップS11)。入出力処理部54は、対応テーブル55を参照し(ステップS12)、データベース56も参照し(ステップS13)、計測中の時間経過、又はデータベース56におけるデータの変化の有無など、対応テーブル55の出力タイミングの条件に適合したデータがデータベース56に有るか否かを判断する(ステップS14)。
【0078】
入出力処理部54は、出力タイミングの条件に適合したデータがデータベース56に無いと判断した場合(S14:NO)、処理をステップS11へ戻して時間の計測を継続し、ステップS11〜S13の処理を実行する。入出力処理部54は、出力タイミングの条件に適合したデータがデータベース56に有ると判断した場合(S14:YES)、データベース56から該当するデータを抽出し(ステップS15)、複数のデータが必要とされているときはデータを適宜組み合わせて出力し(ステップS16)、処理を終了する。
【0079】
このように、IOU5,5,…が、対応テーブル55に記憶されている出力タイミングに従って、データベース56のデータを出力するから、不要なデータが不要なタイミングでECU3,3へ送信されることがない。例えば、図3に示したデータID「3」のデータは毎回出力されることは必要とされていない。これを用いるECU3,3では、値が閾値P1 以上となった最初のタイミングにしか必要でないのに、値が閾値P1 以上である期間は常に送信されるなどの構成では、必要でないデータがCANバス7に送信されることになり、データの授受は非効率的である。このとき、不要なデータの送受信にCANバス7が使用され、データの授受に遅延が発生する一因となり得る。しかしながら、IOU5,5,…が、ECU3,3が必要とするデータのみ出力することにより、データの授受は効率化される。
【0080】
なお、IOU5,5,…は、ECU3,3からのデータ送信要求に応じて対応テーブル55の内容を更新してもよい。図5は、実施の形態1における入出力処理部54が対応テーブル55を更新する処理手順の一例を示すフローチャートである。ECU3,3,…は、CANのリモートフレームを送信するなどにより、必要なデータの送信を当該データを出力できる他のCAN通信ノードへ要求することができる。以下の処理は、IOU5の通信部51により当該リモートフレームが受信されたことを契機に実行される。
【0081】
入出力処理部54は、通信部51によりCANバス7を介して送信されたデータの送信要求が受信された場合、これを受け付ける(ステップS21)。入出力処理部54は、対応テーブル55を参照し、ステップS21にて受け付けたデータの送信要求に相当する対応が有るか否かを判断する(ステップS22)。
【0082】
入出力処理部54は、ステップS22にて無いと判断した場合(S22:NO)、データの送信要求に係るデータの識別情報(データID)と、当該データの出力タイミングとの対応を対応テーブル55に追加する(ステップS23)。これにより、対応テーブル55はECU3,3からの最新の要求に対応して更新される。
【0083】
入出力処理部54は、データの送信要求に応じてデータベース56から必要なデータを抽出し(ステップS24)、複数のデータが必要とされているときはそれらのデータを適宜組み合わせて出力し(ステップS25)、処理を終了する。
【0084】
ステップS22にて有ると判断された場合(S22:YES)、入出力処理部54は、対応テーブル55はそのままで、必要なデータをデータベース56から抽出して(S24)、必要な場合にはデータを組み合わせ、データを出力し(S25)、処理を終了する。
【0085】
なお、ECU3,3からのデータの送信要求に応じて対応テーブル55に対応を追加して更新するのみならず、異なる出力タイミングとすべき場合には、対応テーブル55の一部を消去して更新するなどの処理を行なってもよい。
【0086】
このように、予め対応テーブル55に記憶させていたデータの識別情報と出力タイミングとの対応のみならず、ECU3,3からの新たな要求に対しても対応を対応テーブル55に追加することにより、その後ECU3,3への出力が効率化される。例えば、車載制御システムが配設された後、新たにECU3がプラグインされた場合に、対応テーブル55をIOU5自身で書き換えることができ、システムの変更に柔軟に対応することが可能である。
【0087】
実施の形態1では、車載制御システムはIOU5,5,…を4つ含む構成とし、各IOU5,5,…は夫々記憶部52にデータベース56を記憶する構成とした。記憶部52のデータベース56の内容を定期的に相互に同期させる処理を行なってもよい。この場合、CANバス7は定期的に、データベース56の内容を同期する処理に占有され、各IOU5,5,…は、データベース56に記憶しているデータを他のIOU5,5,…へ送信し、データベース56の内容が共有化される。これにより、IOU5,5,…から夫々アクチュエータ2,2,…にデータを与える場合、異なるIOU5,5,…から出力されるデータの内容は同一である。この場合、同期が完了するまではデータは出力されないので即時性では劣るものの、データの同時性が向上する。
【0088】
実施の形態1においてIOU5は、ASICで構成されるとした。しかしながら、IOU5は、FPGA(Field Programmable Gate Array)により構成されてもよい。
【0089】
(実施の形態2)
実施の形態2では、IOU5,5,…は、ECU3,3、GW4、又は他のIOU5,5,…にて必要なデータが、データベース56に記憶されているデータから演算によって得られるデータである場合、IOU5,5,…にて演算処理を行なってから出力する。
【0090】
図6は、実施の形態2におけるIOU5の内部構成を示すブロック図である。実施の形態2に示すように、IOU5の構成は、演算部57が追加されていること以外は、実施の形態1における構成と同様である。車載制御システムの全体構成も、実施の形態1と同様であるため、共通する構成については実施の形態1と同一の符号を付して詳細な説明を省略する。
【0091】
演算部57は、記憶部52のデータベース56にアクセスすることが可能であり、データベース56に記憶されている特定のデータに対して特定の演算処理を行なうべく構成されている。演算処理の結果得られた数値情報、又は真偽情報などのデータは、入出力処理部54により直接的に通信部51から、当該データを必要とするECU3,3、GW4、又はIOU5,5,…へ送信する。これにより、データを必要とするECU3,3、GW4又はIOU5,5,…にて演算せずともよいから、処理負荷を軽減することができる。
【0092】
演算部57は、演算処理の結果得られたデータをデータベース56に記憶してもよい。これにより、入出力処理部54はデータベース56から抽出することによって演算結果のデータをECU3,3、GW4、又は他のIOU5,5,…へ送信することが可能である。演算処理の結果のデータをデータベース56に記憶することにより、IOU5内における処理回路53a,53b,53c,53dも、演算処理の結果を用いてアクチュエータ2,2の動作を制御することが可能である。
【0093】
なお、演算部57による演算内容は、対応テーブル55に含まれてもよい。例えばデータID「4」のデータについては、データID「10」のデータ値がP2 未満であるか否かによって出力するかのみならず、データID「10」のデータ値をデータID「4」のデータ値に乗算させた結果を出力するとしてもよい(図3参照)。また、夫々演算式が含まれていてもよい。この場合、対応テーブル55の更新により、演算部57による処理内容を変更することができる。
【0094】
(実施の形態3)
実施の形態1及び2では、IOU5,5,…は、CAN通信が可能な通信部51を備えてCANバス7に直接的に接続される構成とした。しかしながら、IOU5は通信部51を備えずともよく、信号線6によりECU3,3に接続されて、CANバス7における通信はECU3,3にて実現される構成としてもよい。
【0095】
図7は、実施の形態3における車載制御システムの構成を示す構成図である。実施の形態3における車載制御システムのセンサ1,1,…、及びアクチュエータ2,2,…の配置は実施の形態1と同様である。また、ECU3,3,…及びGW4がCANバス7に接続されていることも実施の形態1と同様である。ECU3,3,…及びGW4の機能も実施の形態1と同様である。共通する構成は実施の形態1と同一の符号を付して詳細な説明を省略する。
【0096】
図7に示すように、実施の形態3では、センサ1,1,…、及びアクチュエータ2,2,…はIOU8,8,…に接続されている。IOU8,8,…の配置は実施の形態1のIOU5,5,…と同様であるが、IOU8,8,…はCANバス7での通信を行なう機能を持たず、ECU3,3,…を介してCANバス7に接続されている点が異なる。IOU8,8,…は、ECU3,3,…に信号線6により接続されている。一のIOU8は、他のIOU8と信号線6を介して接続されている。
【0097】
これに応じて、ECU3は、マイクロコンピュータ(以下、マイコン)を用いて構成されている場合にはマイコンのI/Oなど、入出力部、またはシリアル通信部などによりIOU8と信号を入出力することができるようにしてある。そしてECU3は、IOU8から出力されるデータの信号を受け付けた場合、自身が備えるCANコントローラ及びトランシーバの機能によりCANフレームにデータを載せてCANバス7へ送信する。
【0098】
以下、実施の形態3におけるIOU8,8,…の内部構成及び処理について説明する。図8は、実施の形態3におけるIOU8の内部構成を示すブロック図である。IOU8は、実施の形態1におけるIOU5同様にASICにより構成され、ECU3との信号の入出力をするためのI/O81と、記憶部82と、処理回路83a,83b,83c,83dと、入出力処理部84と、対応テーブル85とを備える。記憶部82には、データベース86が記憶されている。更に、実施の形態3におけるIOU8は上述の構成部に加えて、データベース86のデータ群の内容に基づいて異常を検知する異常検知部88を備えている。
【0099】
記憶部82、処理回路83a,83b,83c,83d、入出力処理部84、対応テーブル85、及びデータベース86は、実施の形態1におけるIOU5の記憶部52、処理回路53a,53b,53c,85d、入出力処理部54、対応テーブル55、データベース56の構成及び機能が同じであるので、詳細な説明を省略する。
【0100】
I/O81は、ECU3とのインタフェースである。I/O81は、ECU3へのデータ、又は要求などを示す信号の送信を実現する。入出力処理部84は、対応テーブル85に基づき、データベース86からデータを抽出してI/O81によりECU3へ送信する。ECU3が他のECU3から受信したCANフレームから抽出したデータ、又はデータの送信要求をIOU8へ出力した場合、IOU8はI/O81によりこれを入力し、データである場合はデータベース86に記憶し、データの送信要求であった場合は、当該送信要求に応じたデータの送信処理を行なう。
【0101】
このようにIOU8は、通信手段を必ずしも持たずともよい。ECU3では、IOU8から出力されたデータに、対応するCANのIDを付加してCANフレームに載せてCANバス7へ送信する。これにより、ECU3にてフレームの出力タイミングの調整処理を行なわずともよい点で、処理負荷が軽減される。このとき、IOU8ではASICにより処理を行なう構成であるからIOU8における処理は高速である。
【0102】
異常検知部88は、異常検知処理をすべく構成された回路である。異常検知部88は、データベース86にアクセスが可能であり、入出力処理部84とも接続されている。異常検知部88は、データベース86の内容を総合的に判断して、車両内外の状況に対する異常、車両内に配置されている各装置の異常、及び、センサ1,1,…、又はアクチュエータ2,2,…の動作状態の異常を検知する。例えば、データベース86に記憶されているデータの内のいずれかが、外気温度を示す数値情報である場合、数値情報が80℃に対応するときは、IOU8の異常検知部88が異常を検知する。この場合、車両内に搭載される温度センサが異常である可能性がある。この場合、ECU3へ外気温度のデータを出力してECU3で判断させるまでもない。
【0103】
異常検知部88は内蔵するメモリに、異常検知対象の特定のデータに対する異常検知条件、例えば閾値を記憶しておく。異常検知部88は、一定時間が経過する都度、データベース86の内容を参照し、特定のデータの数値情報と閾値との大小の比較に基づいて異常を検知する。また、複数の特定のデータの内容に基づいて異常状態をより細かく設定してもよい。例えば異常検知部88は、複数の特得のデータの内の一のデータが真偽情報であって、他のデータが数値情報である場合、前記一のデータがFALSEであって、数値情報が所定の閾値以上であるときは異常が予見されるなどと異常を検知してもよい。このような判断で、アクチュエータ2,2,…のいずれかの動作状態の異常を検知できる。更に、上述の例における外気温度を示す数値情報について時間を経た変化率が所定の閾値以上であるか否かにより、異常を検知することも可能である。
【0104】
異常検知部88は、上述のように種々の方法にて異常を検知、又は異常が予見されると検知した場合、入出力処理部84に通知する。入出力処理部84は、異常検知部88から通知を受けた場合、エラー発生を示すエラー通知をI/O81によりECU3へ出力する。これにより、ECU3からエラー通知が他のECU3,3,…へ送信され、車載制御システム全体で異常を検知することが可能である。なお、異常検知部88は、異常であること及び異常コードなどを示す診断データをデータベース86に記憶し、入出力処理部84によりECU3へ出力することを可能としてもよい。
【0105】
図9は、実施の形態3におけるIOU8による異常検知の処理手順の一例を示すフローチャートである。異常検知部88は、一定時間が経過する都度に、以下に示す処理を行なう。
【0106】
異常検知部88は、データベース86から異常検知対象のデータを抽出し(ステップS31)、抽出したデータの数値情報又は真偽情報が、内蔵するメモリに記憶してある異常検知条件を満たすか否かを判断する(ステップS32)。異常検知部88は、異常検知条件を満たさないと判断した場合(S32:NO)、そのまま処理を終了する。異常検知部88は、異常検知条件を満たすと判断した場合(S32:YES)、異常を入出力処理部84へ通知し(ステップS33)、処理を終了する。
【0107】
このように、センサ1,1,…及びアクチュエータ2,2,…などの機器が集約されて直接的に接続されているIOU8にて、データベース86に各機器から得られるセンサ情報、制御状態を示す情報などのデータが記憶されるから、各データを総合的に監視して異常を検知することができる。ECU3,3,…は、IOU8,8,…により出力され、他のECU3,3,…からも送信されるデータに基づいて異常を検知することはできる。特にGW4は、複数のCANバス7に接続され、前記複数のCANバス7,7に接続されている全ECU3,3,…からのデータを取得できるから、データを集約して記憶しておくことにより、より総合的に判断することができる。しかしながら、同一のIOU8に接続されているセンサ1,1,…及びアクチュエータ2,2,…についての異常検知については、ECU3,3,…、又はGW4が各機器からデータを集めて異常か否かを判断するよりも、IOU8にて異常を検知する方が即時性も向上し、ECU3,3,…又はGW4の処理負荷も軽減される。
【0108】
実施の形態2におけるIOU8の異常検知部88は、内蔵するメモリに異常検知条件を記憶しておき、異常検知の監視対象である特定のデータと異常検知条件とを比較して異常であるか否かを判断する構成とした。しかしながら、本発明における異常検知はこれに限らず、例えば対応テーブル85に異常検知条件を付加して記憶しておく構成としてもよい。この場合、対応テーブル85は書き換え可能であるから、異常検知条件を柔軟に変更できる。このとき異常検知部88は、対応テーブル85を参照することが可能に構成され、データベース86と対応テーブル85の異常検知条件とを比較して異常を検知する。
【0109】
なお、実施の形態2においてIOU8,8,…と、センサ1,1,…、及びアクチュエータ2,2,…との間、及びIOU8,8,…との間は信号線6のみならず、LINなどのネットワークでもよい。
【0110】
(実施の形態4)
実施の形態1乃至3では、IOU5又はIOU8はASICにより構成されてハードウェア的に各処理を行なう構成とした。ハードウェア的な構成により、複数の機器、即ちセンサ1,1,…及びアクチュエータ2,2,…からの入出力を各処理回路53a,53b,53c,53d(83a,83b,83c,83d)にて並行的に処理でき、IOU5(IOU8)における処理を高速化できた。しかしながら本発明はこれに限らず、IOUは、マイコンを用いて制御プログラムに基づいて動作する構成としてもよい。
【0111】
実施の形態4では、IOUをマイコンを用いて実現する。IOUの内部構成以外の車載制御システムの構成は、実施の形態1における構成と同様であるため、説明を省略する。以下、マイコンでIOUを実現する場合の例について説明する。
【0112】
図10は、実施の形態4におけるIOU50の内部構成を示すブロック図である。IOU50は、CPU501、RAM502、メモリ503、I/O504、ネットワークコントローラ505を含むマイクロコンピュータ(マイコン)500と、通信用のトランシーバ506とを備える。
【0113】
RAM502は、SRAM、DRAMなどを用い、データベース506が記憶されている。メモリ503は、フラッシュメモリ、EEPROM(Electronically Erasable and Programmable Read Only Memory )などの不揮発性メモリを用いる。メモリ503には、コンピュータをIOUとして動作させるための制御プログラム50Pと、対応テーブル507が記憶されている。
【0114】
マイコン500のCPU501は、メモリ503に記憶されている制御プログラム50Pに基づく処理を実行する。これにより、CPU501は、実施の形態1乃至3における入出力処理回路54(84)としての機能を実現する。また、CPU501は、制御プログラム50Pに基づき、実施の形態1乃至3における処理回路53a,53b,53c,53d(83a,83b,83c,83d)の機能を夫々、第1処理部508a,508b,508c,508dとして実現する。
【0115】
I/O504はマイコンのインタフェースであり、各センサ1,1,…、アクチュエータ2,2,…が夫々信号線により接続される。センサ1,1,…及びアクチュエータ2,2,…はI/Oアドレスにて区別される。CPU501の第1処理部508a,508b,508c,508dとしての機能により、夫々対応するセンサ1,1,…又は空く中テータ2,2,…から値が入力されたレジスタを参照してデータベース506に記憶する。
【0116】
ネットワークコントローラ505は、マイコンのCAN通信を実現し、与えられた信号からCANフレームを作成してトランシーバ506へ与えてCANバス7を介した通信を実現する。ネットワークコントローラ505及びトランシーバ506にて、実施の形態1のIOU5の通信部51に対応する。CPU501は、メモリ503の対応テーブル507の出力タイミングに基づいてデータベース506から抽出したデータをネットワークコントローラ505及びトランシーバ506によりECU3,3,…、GW4、又は他のIOU50,50,…へ送信する。また、CPU501は、ネットワークコントローラ505及びトランシーバ506によりECU3,3,…、GW4、又は他のIOU50,50,…から受信したデータをデータベース506に記憶する。
【0117】
その他、CPU501の入出力処理部としての機能は、実施の形態1と同様であるから詳細な説明は省略する。勿論、CPU501は、実施の形態3における異常検知部88としての機能を発揮してもよい。このように、IOU50は、マイコンを用いた構成でも実現することが可能である。
【0118】
実施の形態4では、IOU50を全体としてマイコン制御とする構成とした。しかしながら、入出力処理部、及び通信部の機能は実施の形態4のようにマイコン制御とし、第1〜第4処理部(508a〜508d)の処理は、実施の形態3のように処理回路53a,53b,53c,53dにより実現する構成としてもよい。
【0119】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0120】
1 センサ(機器)
2 アクチュエータ(機器)
3 ECU(制御装置)
5 IOU(入出力装置)
52 記憶部
53a,53b,53c,53d 処理回路
54 入出力処理部(出力手段)
55 対応テーブル
56 データベース
50 IOU(入出力装置)
501 CPU(出力手段)
502 RAM(記憶部)
506 データベース
507 対応テーブル
8 IOU
82 記憶部
83a,83b,83c,83d 処理回路
86 データベース
88 異常検知部(異常検知手段)
【特許請求の範囲】
【請求項1】
データを入力又は出力する複数の機器と、いずれかの機器からのデータを使用するか、又は機器へデータを与えることにより機器を制御する1又は複数の制御装置との間に接続され、前記複数の機器の前記1又は複数の制御装置への入出力を処理するようにしてある入出力装置において、
入出力されるデータを記憶するための記憶部を備え、
該記憶部に前記複数の機器のいずれかから入出力されるデータをデータベース形式にて記憶する手段と、
前記データベースに記憶されている1又は複数のデータに基づき、前記制御装置から必要とされるデータを必要とされるタイミングにて出力する出力手段と
を備えることを特徴とする入出力装置。
【請求項2】
前記制御装置から必要とされるデータの識別情報と、前記データが前記制御装置から必要とされる出力タイミングとの対応を示す対応テーブルを備え、
前記出力手段は、前記対応テーブルの識別情報及び出力タイミングに基づいて、前記データベースからデータを読み出して出力するようにしてあること
を特徴とする請求項1に記載の入出力装置。
【請求項3】
前記出力手段は、前記制御装置から必要とされるデータの変化の有無を判断する手段を備え、該手段が有と判断した場合に変化後のデータを出力するようにしてあること
を特徴とする請求項1又は2に記載の入出力装置。
【請求項4】
前記出力手段は、前記制御装置から必要とされるデータと所定値との比較に基づき前記データを出力するようにしてあること
を特徴とする請求項1又は2に記載の入出力装置。
【請求項5】
前記出力手段は、前記制御装置から必要とされるデータを複数組み合わせて出力するようにしてあること
を特徴とする請求項1乃至4のいずれかに記載の入出力装置。
【請求項6】
前記制御装置からのデータ出力要求を受け付ける手段と、
前記データ出力要求に応じて前記データベースからデータを抽出して出力する手段と、
前記データ出力要求に基づき前記対応テーブルを更新する手段と
を備えることを特徴とする請求項2乃至5のいずれかに記載の入出力装置。
【請求項7】
前記制御装置から必要とされるデータを、前記データベースに記録されている1又は複数のデータを用いた演算により求める演算手段を備え、
前記出力手段は、演算により求めたデータを出力するようにしてあること
を特徴とする請求項1乃至6のいずれかに記載の入出力装置。
【請求項8】
前記演算手段により求めたデータを前記データベースに記憶するようにしてあること
を特徴とする請求項7に記載の入出力装置。
【請求項9】
前記データベースに記憶されているデータを、前記複数の機器の内のいずれか特定の機器へ該特定の機器の動作を制御すべく出力する手段を備えること
を特徴とする請求項1乃至8のいずれかに記載の入出力装置。
【請求項10】
接続されている複数の機器夫々に対応して特定の処理を行なうべく構成される複数の処理回路を備え、
前記複数の処理回路は夫々、前記データベースにデータを記憶し、又は前記データベースからデータを抽出する手段を備えること
を特徴とする請求項1乃至9のいずれかに記載の入出力装置。
【請求項11】
前記複数の処理回路の内の一部又は全部は、
対応する機器から出力されたデータに基づき他のデータを求める演算処理を行ない、演算結果に基づき制御データを他の機器に対応する処理回路へ出力する手段を備えること
を特徴とする請求項10に記載の入出力装置。
【請求項12】
前記複数の処理回路の内の一部又は全部は、
前記データベースに記憶されているデータに基づき、対応する機器の動作の停止又は起動を制御する手段を備えること
を特徴とする請求項10又は11に記載の入出力装置。
【請求項13】
前記複数の機器が夫々、入力又は出力するデータに基づき、異常を検知する手段を備えること
を特徴とする請求項1乃至12に記載の入出力装置。
【請求項1】
データを入力又は出力する複数の機器と、いずれかの機器からのデータを使用するか、又は機器へデータを与えることにより機器を制御する1又は複数の制御装置との間に接続され、前記複数の機器の前記1又は複数の制御装置への入出力を処理するようにしてある入出力装置において、
入出力されるデータを記憶するための記憶部を備え、
該記憶部に前記複数の機器のいずれかから入出力されるデータをデータベース形式にて記憶する手段と、
前記データベースに記憶されている1又は複数のデータに基づき、前記制御装置から必要とされるデータを必要とされるタイミングにて出力する出力手段と
を備えることを特徴とする入出力装置。
【請求項2】
前記制御装置から必要とされるデータの識別情報と、前記データが前記制御装置から必要とされる出力タイミングとの対応を示す対応テーブルを備え、
前記出力手段は、前記対応テーブルの識別情報及び出力タイミングに基づいて、前記データベースからデータを読み出して出力するようにしてあること
を特徴とする請求項1に記載の入出力装置。
【請求項3】
前記出力手段は、前記制御装置から必要とされるデータの変化の有無を判断する手段を備え、該手段が有と判断した場合に変化後のデータを出力するようにしてあること
を特徴とする請求項1又は2に記載の入出力装置。
【請求項4】
前記出力手段は、前記制御装置から必要とされるデータと所定値との比較に基づき前記データを出力するようにしてあること
を特徴とする請求項1又は2に記載の入出力装置。
【請求項5】
前記出力手段は、前記制御装置から必要とされるデータを複数組み合わせて出力するようにしてあること
を特徴とする請求項1乃至4のいずれかに記載の入出力装置。
【請求項6】
前記制御装置からのデータ出力要求を受け付ける手段と、
前記データ出力要求に応じて前記データベースからデータを抽出して出力する手段と、
前記データ出力要求に基づき前記対応テーブルを更新する手段と
を備えることを特徴とする請求項2乃至5のいずれかに記載の入出力装置。
【請求項7】
前記制御装置から必要とされるデータを、前記データベースに記録されている1又は複数のデータを用いた演算により求める演算手段を備え、
前記出力手段は、演算により求めたデータを出力するようにしてあること
を特徴とする請求項1乃至6のいずれかに記載の入出力装置。
【請求項8】
前記演算手段により求めたデータを前記データベースに記憶するようにしてあること
を特徴とする請求項7に記載の入出力装置。
【請求項9】
前記データベースに記憶されているデータを、前記複数の機器の内のいずれか特定の機器へ該特定の機器の動作を制御すべく出力する手段を備えること
を特徴とする請求項1乃至8のいずれかに記載の入出力装置。
【請求項10】
接続されている複数の機器夫々に対応して特定の処理を行なうべく構成される複数の処理回路を備え、
前記複数の処理回路は夫々、前記データベースにデータを記憶し、又は前記データベースからデータを抽出する手段を備えること
を特徴とする請求項1乃至9のいずれかに記載の入出力装置。
【請求項11】
前記複数の処理回路の内の一部又は全部は、
対応する機器から出力されたデータに基づき他のデータを求める演算処理を行ない、演算結果に基づき制御データを他の機器に対応する処理回路へ出力する手段を備えること
を特徴とする請求項10に記載の入出力装置。
【請求項12】
前記複数の処理回路の内の一部又は全部は、
前記データベースに記憶されているデータに基づき、対応する機器の動作の停止又は起動を制御する手段を備えること
を特徴とする請求項10又は11に記載の入出力装置。
【請求項13】
前記複数の機器が夫々、入力又は出力するデータに基づき、異常を検知する手段を備えること
を特徴とする請求項1乃至12に記載の入出力装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−231407(P2010−231407A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2009−77071(P2009−77071)
【出願日】平成21年3月26日(2009.3.26)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願日】平成21年3月26日(2009.3.26)
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]