
入力システム
【課題】 表示装置にて表示される地図上の勾配を、表示画面上の操作部の操作を行なわない場合においても認識することができる入力システムを提供する。
【解決手段】 車両に搭載される地図表示装置400の入力システム1であり、画面表示されたポインタ410を、同じく画面表示された地図上の予め定められた経路405に沿って相対移動させるに伴い、該経路405上の勾配値変化を反映した形で操作部21の中立角度位置が変更するよう駆動する。
【解決手段】 車両に搭載される地図表示装置400の入力システム1であり、画面表示されたポインタ410を、同じく画面表示された地図上の予め定められた経路405に沿って相対移動させるに伴い、該経路405上の勾配値変化を反映した形で操作部21の中立角度位置が変更するよう駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、入力システムに関する。
【背景技術】
【0002】
電子機器に接続されるマウスやトラックボール等のポインティングデバイスを操作部として用いて、電子機器の動作を操作したり、表示装置の画面上において、その操作方向に対応してポインタ等を移動させたりする入力装置、又は入力システムがある。これらの入力装置や入力システムは、ユーザーによってその操作部を操作されることにより、その操作方向に対応した座標を電子機器に出力するものである。このような操作部は、ナビゲーション装置にも利用されており、操作部の操作により表示装置に表示される地図上のポインタを移動させて、位置指示、あるいは位置選択を行なわせるものがある。
【0003】
近年、こうしたナビゲーション装置において、表示装置に表示される地図の勾配情報をユーザーに認識させたいという要望がある。特許文献1には、ジョイスティックを用いて地図のスクロールを行なう際に、画面上に表示されたポインタが位置するエリアの高度データを抽出して、移動するポインタの高度差に応じてジョイスティックへの反力を発生させ、その高度差(勾配)をユーザーに触感伝達する技術が開示されている。
【特許文献1】特開2004−226301号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、特許文献1においては、ジョイスティックの傾斜操作を行なったときに高度差に応じた反力が発生する構成とされているため、ジョイスティックを操作しなければ高度差を触感できない。ナビゲーション装置等においては、ジョイスティックを傾斜させなくとも画面内容が移動するオンルートスクロール等の画面表示機能が存在するため、こうした場合にユーザーに地図上の高度差を触感伝達することができない。
【0005】
本発明の課題は、表示装置にて表示される地図上の勾配を、表示画面上の操作部の操作を行なわない場合においても認識することができる入力システムを提供することにある。
【課題を解決するための手段及び発明の効果】
【0006】
上記課題を解決するために、本発明の入力システムは、
車両に搭載される地図表示装置の位置入力システムであって、
地図表示装置に地図を表示するための地図情報を記憶する地図情報記憶部と、
該地図情報に基づいて地図表示装置に地図を表示する地図表示手段と、
地図表示装置の画面上に表示される地図上でポインタによる位置指示を行なうための操作部を備え、該操作部は、非操作時において自身の操作軸線が中立角度位置に保持されるとともに、操作時においては地図上で位置指示すべき方向に対応する方向に操作軸線が中立角度位置から傾斜するよう、中立角度位置への復帰力に抗して操作されるポインティングデバイスと、
操作軸線に自発的な角度変化が生ずるように操作部を駆動する操作部駆動手段と、
操作部の操作に応じて、ポインタを地図上の対応する向きに相対移動させるポインタ移動表示手段と、
地図上の地点毎に、当該地点のポインタの移動方向における勾配を反映した勾配反映情報を記憶する勾配反映情報記憶部と、
ポインタを地図上の予め定められた経路に沿って相対移動させるに伴い、該ポインタが経路上にて順次通過する各地点の勾配反映情報を取得する勾配反映情報取得手段と、
取得される該勾配反映情報に基づいて、経路上の勾配値変化を反映した形で操作軸線の傾斜角度位置が変化するように操作部駆動手段を駆動制御する操作部傾斜駆動制御手段と、
を備えたことを特徴とする。
【0007】
上記本発明の構成によると、表示装置に表示される地図のポインタ指示地点の勾配を反映する形で操作部が傾斜状態とされるから、操作部を操作しない状態であっても、操作部を触れてさえいれば、その傾斜動作を触感することができ、その傾斜動作から地図上の勾配を認識することができる。なお、本発明におけるポインタとは、表示された地図上で位置指示を行なうものであり、位置指示を行なう位置指示マークやナビゲーション装置にて走行案内経路上に表示される自車両位置マーク、表示内容に係らず画面上に固定的に基準位置を定める基準位置マーク等を含むものである。
【0008】
本発明の入力システムでは、取得される勾配反映情報に基づいて、操作軸線の中立角度位置を、ポインタが示す経路上の各地点の勾配値に対応した値となるように変更しつつ定める中立角度位置変更手段が設けられ、操作部傾斜駆動制御手段は、操作部の中立角度位置が、中立角度位置変更手段による決定結果に従い変化するように操作部駆動手段を駆動制御することができる。この構成によると、操作部の被操作状態における中立位置が地図上のポインタ指示地点の勾配に応じて変更されるから、操作部の中立位置の変化動作から地図上の勾配を認識することができる。
【0009】
本発明の入力システムは、地図表示装置の画面上の固定位置にポインタの基準位置を定める基準位置設定手段を備え、ポインタ移動表示手段は、ポインタの指示位置が地図上にて基準位置から相対移動するに伴い、地図を画面上にて該相対移動に対応した向きにスクロールする地図スクロール手段を備えることができる。この構成によると、地図のスクロール表示中であっても、操作部の傾斜から、地図スクロール中のポインタ指示地点の傾斜を認識することができる。
【0010】
本発明における勾配反映情報は、各地点の標高情報であり、操作部傾斜駆動制御手段は、ポインタの移動方向に順次定められる勾配算出区間の各両端の標高差分に基づいて、個々の勾配算出区間の勾配値を算出する勾配算出手段を備え、算出された該勾配値に基づいて操作部駆動手段を駆動制御することができる。この構成によると、地図情報の各地点の標高状態から容易に勾配値を算出することができる。
【0011】
本発明における勾配算出手段は、勾配算出区間を経路に沿って一定の区間長を有するものとして定めることができる。一定の区間長が定められていることで勾配算出区間の設定が容易となり、ひいては勾配値の算出が容易となる。
【0012】
本発明の入力システムは、ポインタを経路に沿って予め定められた速度で相対移動させるポインタ移動手段を備え、勾配算出手段は、ポインタが通過する各地点の標高値を一定時間毎にサンプリングする標高値サンプリング手段を備え、隣接する標高値サンプリング値とサンプリング時間間隔とに基づいて勾配値を算出するものとできる。勾配算出区間をサンプリング時間間隔により定めることができるから、ポインタの相対移動速度、言い換えれば、地図のスクロール送り速度の速い場合や遅い場合に応じて、適切にサンプリング時間間隔を定めることができる。そのため、不要な勾配値算出を減じることができる。
【0013】
本発明の入力システムにおける勾配算出手段は、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なう勾配スムージング手段を有するものとできる。急激な勾配変化は操作者に違和感を与える可能性があるから、これをスムージングすることで違和感を低減できる。
【0014】
本発明の入力システムにおける操作部傾斜駆動制御手段は、地図表示装置に表示される地図の表示尺度が予め定められた表示尺度よりも大きい場合にのみ操作部駆動手段の駆動制御を行なうものとできる。表示縮尺が小さい広域表示の場合は勾配認識が不要とされる場合がある。この構成によると、必要とされる表示縮尺においてのみ勾配認識が可能となるよう構成することができる。例えば、表示縮尺が25000分の1以上の表示の場合にのみ操作部の駆動制御を行なうものとできる。
【0015】
本発明の入力システムにおける操作部傾斜駆動制御手段は、ポインタの地図上での移動方向に応じて操作部の駆動傾斜方向を変化させるよう操作部駆動手段の駆動制御を行なうことができる。ポインタの移動方向に対応する方向に操作部が傾斜するから、勾配の向きを容易に認識することができる。
【0016】
本発明の入力システムにおける操作部傾斜駆動制御手段は、ポインタが指示する地点の地図上での種別に応じて、勾配値に応じた操作部駆動手段の駆動制御を互いに異なるパターンにて実施するものとできる。この構成によると、例えば、落石や凍結等といった危険地点が有る場合にはその地点を大勾配地点として操作部の傾斜を大とし、運転者に危険地点の報知を行なうことができる。
【0017】
本発明の入力システムにおいては、操作部に外部から操作力が加えられた場合に、該操作部に予め定められた操作反力を生じさせる操作反力発生手段と、ポインタが地図上の道路外に定められた経路上にある場合の操作反力が、同じく道路上に定められた経路上にある場合の操作反力よりも大きく設定されるよう操作反力発生手段を制御する操作反力制御手段とを有するものとできる。この構成によると、道路上の操作反力が小、道路外の操作反力が大とされるから、道路に沿ったポインタの移動を容易とすることができる。
【0018】
本発明の入力システムにおいては、経路が地図上の道路に沿って定められ、操作部傾斜駆動制御手段は、該道路に沿った勾配変化に基づいて操作部駆動手段の駆動制御を行なうことができる。この構成によると、車両が主として走行する道路について、その勾配変化を認識することが容易となる。
【0019】
本発明の入力システムにおいては、地図上の道路に沿って走行案内経路を設定する走行案内経路設定手段と、
操作部の操作状態とは無関係にポインタを、走行案内経路をトレースする形で自動移動させるポインタ自動移動手段とを備え、操作部傾斜駆動制御手段は、該走行案内経路上を移動するポインタ位置の変化に対応させた形で操作部駆動手段を駆動制御するものとできる。ナビゲーション装置に搭載されるオンルートスクロール等、非操作状態でのスクロール表示中であっても、操作部に手を触れていれば、に沿った勾配を操作部の傾斜から認識することができる。
【0020】
操作部傾斜駆動制御手段は、ポインタが通過した地点に対応する勾配値を操作部の駆動状態に反映させる応答遅れ時間を、ポインタが地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しつつ本発明の実施形態について説明する。
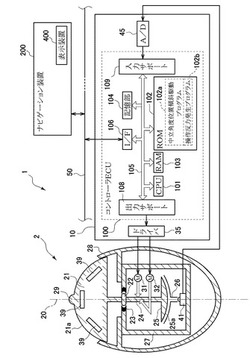
図1は、一実施形態に係る入力システム1の電気的ブロック図の概略を示す図である。入力システム1は、地図表示装置(以下、表示装置という)400の位置入力システムであり、車両に搭載された表示装置400の画面に対応した位置を指定するポインティングデバイスとして構成された、車両のインストルメントパネル等に取り付けられたハプティックデバイス(触感提示装置)2と、これを制御するコントローラ10と、を備える。ハプティックデバイス2は、ユーザーにより操作されるトラックボール部(操作部)21を有しており、コントローラ10は、操作されている方向に抗する操作反力をトラックボール部21に付加するようアクチュエータ(本実施形態においてはモータ)31,32を制御する。以下、各々の詳細について説明する。
【0022】
まず、ハプティックデバイス2について説明する。ハプティックデバイス2は、表示装置400の画面上に表示される地図上で位置指示を行なうためトラックボール部(操作部)21を備え、筐体28がそのトラックボール部21の操作面21aを露出させた状態でこれを保持している。位置指示は、表示装置400に画面表示される位置指示マークや自車両の現在地を示す自車両位置マーク、表示内容に係らず画面上に固定的に基準位置を定める基準位置マークにより行われる。本発明のポインタはこれらのマークの概念を含むものである。また、これらマークによる位置指示を行なうための操作部の操作とは、画面表示された地図に対するこれらマークの相対移動に係る操作であり、例えば、画面表示された地図上で位置指示マークを操作部の動きに対応するように動かす操作や、位置指示マーク、基準位置、又は自車両位置マークを固定してこれらマークに対し地図側を移動させる操作、画面上の定められた経路上で自車両位置マークを自動移動させる設定操作及びその移動経路を設定する操作等を含むものである。
【0023】
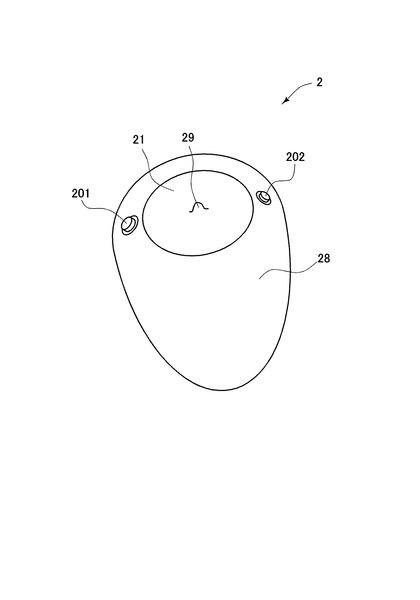
図2は、ハプティックデバイス2の外観の概略を示す図である。ハプティックデバイス2は、表示装置400の画面に対応した位置を指示するためのトラックボール部21の他に、その位置に対応付けられた操作を選択するための決定スイッチ201と、元の画面に戻すための戻りスイッチ202とを外面に有している。なお、これらスイッチとは別に、トラックボール部21の操作により調整しようとする車両内の機能を選択する操作部を設け、「カーナビゲーション装置」や「カーエアコン」、「カーオディオ」等の機能を選択可能としてもよい。これにより、ハプティックデバイス2をナビゲーション機能以外の機能にも使用することが可能となる。
【0024】
トラックボール部21は、球面状の操作面21aを有しており、トラックボール内部には、制御状態を点灯表示で知らせるためのLED部39が設けられている。トラックボール部21の操作面を形成する部材は透光性部材により形成されており、LED部39の発光が球面状の操作面21aを介して視認可能とされている。
【0025】
トラックボール部21の裏側からは支柱24が延出し、収納部27に差し込まれている。支柱24の途中には球状部22が形成され、収納部27に設けられている軸受23でこれを支持することにより、支柱24は収納部27に対して揺動自在に支承されている。このトラックボール部21は、非操作時において自身の操作軸線20が中立角度位置に保持されるとともに、操作時においては表示装置400に表示される地図上で位置指示すべき方向に対応する方向に操作軸線が中立角度位置から傾斜するよう、中立角度位置への操作反力(復帰力)に抗して操作される。
【0026】
このように構成されることで、トラックボール部21は、ユーザーが接触する接触面である操作面21aに沿った方向に可動可能とされており、ユーザーが自身の手(指先)とトラックボール部21との摩擦力を利用して操作を行なうタッチ操作式とされている。
【0027】
また、トラックボール部21は、操作面21aに沿った半球状の可動域とされ、その範囲内で自在に動かすことができる。すなわち、ユーザーは、自身の手(指先)が操作面21aに接触した箇所から、その接触面の面内方向のいずれの方向(360度)にも動かすことができる(可動域の端部を除く)。
【0028】
トラックボール部21の操作面21aは、軸受23に指示されている球状部22を中心とする球面とされている。また、操作面21aの中央部には、ユーザーに中心位置を知らせるための突起部29が設けられている。これにより、トラックボール部21の操作軸線20が傾斜したことが視認可能となる。
【0029】
収納部27には、トラックボール部21が操作されている方向(操作方向)を検出するオプティカルイメージセンサ(操作入力変位検出部)41が設置されている。オプティカルイメージセンサ41は、図示しない光源とともに収納部27内の底面に実装されている。他方、トラックボール部21から延出する支柱24の下端には、軸受23に支持されている球状部22を中心とする球面状の端面25aを有する下端部25が設けられており、この端面25aには、所定の検出パターンが形成されている。
【0030】
操作方向の検出には、光源から光を照射し、下端部25の端面25aに形成された検出パターンの像を、導光管26を介してオプティカルイメージセンサ41に導くことにより、支柱24の揺動方向と揺動量(揺動角度)、すなわちX−Y直交座標におけるトラックボール部21の操作量を検出することができるようになっている。オプティカルイメージセンサ41により検出された位置検出信号は、コントローラ10に対してフィードバックされる。なお、操作方向検出手段としては、直交するX軸,Y軸にそれぞれ設けられたフォトエンコーダ等を適用することもできる。
【0031】
ポインティングデバイスであるハプティックデバイス2の操作部であるトラックボール部21は、二次元操作自由度を有するものであり、操作入力変位検出部であるオプティカルイメージセンサ41は、当該操作部による二次元操作入力変位を検出するものである。
【0032】
収納部27には、トラックボール部21に対して操作が許容される方向に沿って力を付加することが可能なアクチュエータとしてのモータ31,32も設置されている。モータ31,32は、直交するX軸,Y軸に対してそれぞれ設けられており、支柱24と図示しないシャフトを介して接続され、その回転運動を軸線方向に沿った直線運動に変換して支柱24に伝えることで、トラックボール部21に対して力を与える。このモータ31,32は、コントローラ10からの駆動信号に基づき、トラックボール部21に対して操作方向に抗する操作反力を付加するように動作するものであり、本発明の操作反力発生手段として機能する。また、このモータ31,32は、トラックボール部21の操作軸線に自発的な角度変化が生ずるようにトラックボール部21を駆動する操作部駆動手段としても機能する。
【0033】
次にコントローラ10について説明する。コントローラ10は、ハプティックデバイス2の制御を司るコントローラECU(Electronic Control Unit)100を備える。コントローラECU100は、CPU101,ROM102,RAM103,入力ポート109,出力ポート108がバス105を介して接続されたマイクロプロセッサからなる。また、車内ネットワークを構築するシリアル通信バス50とコントローラECU100内部のバス105とは、シリル通信インターフェース(I/F)106を介して接続されている。ROM102は、CPU101が実行するプログラム及びそれに必要なデータを記憶しており、RAM103は、CPU101がこれらプログラムを実行する際に作業領域として利用される。
【0034】
また、コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号をデジタル変換して入力ポート109に入力するA/D変換回路45も備える。また、コントローラ10は、オプティカルイメージセンサ41からフィードバックされた位置検出信号を基にコントローラECU100で演算され、出力ポート108から出力された制御信号に基づいてハプティックデバイス2に内蔵されたモータ31,32を駆動するドライバ回路35も備える。
【0035】
コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号によってトラックボール部21が操作されている方向を検知すると、その操作方向に抗する操作反力を付加するようにモータ31,32を駆動する。
【0036】
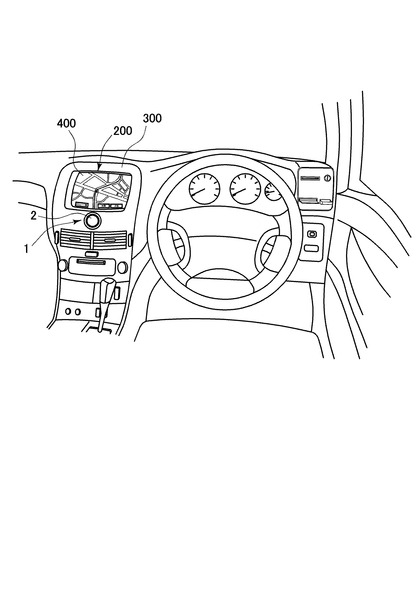
シリアル通信バス50には、車両のインストルメントパネル300に配された表示装置400が接続されており(図3参照)、コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号や決定スイッチ201の押下検出信号を表示装置400へ送信する。表示装置400は、位置検出信号や押下検出信号を受信すると、トラックボール部21の操作方向に対応付けて画面に表示されている各種操作を実行するための処理を行なう。このように、入力システム1は、表示装置400の画面に対応した位置を指定するポインティングデバイスとして機能する。
【0037】
また、ROM102には、トラックボール部21の操作軸線20を中立角度位置に復帰させるための操作反力を発生させる操作反力発生プログラム102bと、後述するトラックボール部21の操作軸線の傾斜角度位置が変化するように駆動制御する中立角度位置傾斜駆動プログラム102aとが記憶されている。なお、この操作反力発生プログラム102bは、CPU101により実行されることで本発明の操作反力制御手段として機能するものであり、中立角度位置傾斜駆動プログラム102aは、CPU101により実行されることで本発明の操作部傾斜駆動制御手段として機能するものである。
【0038】
図3に本発明の入力システム1の設置例を示す。入力システム1は、車両のインストルメントパネル300の前面に備えられたナビゲーション装置200の入力システムとして、ナビゲーション装置200の近傍に備えられている。
【0039】
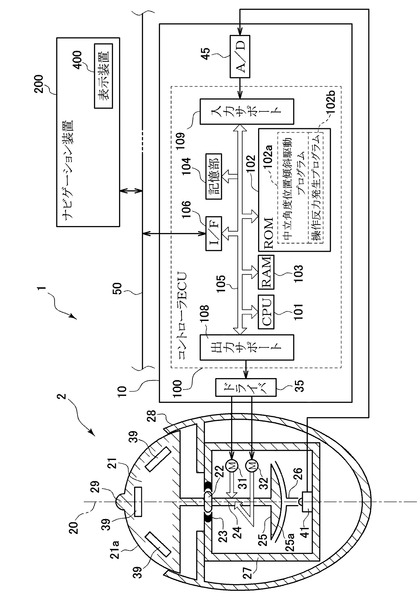
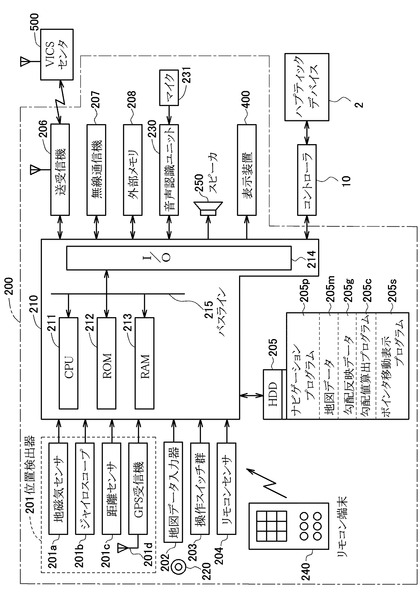
次にナビゲーション装置200について説明する。図4は、車両用ナビゲーション200の構成例である。車両用ナビゲーション装置200は、位置検出器201、地図データ入力器202、操作スイッチ群203、リモートコントロール(以下リモコンと称する)センサ204、記憶装置205、送受信機206、無線通信機207、外部メモリ208、音声認識ユニット230、音声出力装置250、表示装置400、上記したコントローラ10、及びこれらが接続される制御回路210を備えている。
【0040】
位置検出器201は、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ201aと、角速度を検出することよって方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ201bと、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ201cと、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機201Dとを備えている。これらのセンサ等201a,201b,201c,201dは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用されるようになっている。なお、精度によっては、前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。
【0041】
操作スイッチ群203は、例えば表示装置400と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置400の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が2次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。これら操作スイッチ群203およびリモコン端末240によって、種々の指示を入力することが可能である。本実施形態においては、表示装置に表示された地図上で、該地図に対し相対移動する形で表示可能なポインタの移動モードを設定する操作スイッチ、及びそれら移動モードに関する詳細設定を行なう操作スイッチなどが含まれる。移動モードの詳細設定に関しては、例えばトラックボール部21の中立角度位置変更により地図上の勾配伝達を行なう勾配伝達モードのオン・オフや、スクロール表示等の場合のスクロール表示速度等の設定である。
【0042】
また、マイク231および音声認識ユニット230を用いて種々の指示を入力することも可能である。これは、マイク231から入力された音声信号を、音声認識ユニット230において周知の隠れマルコフモデル等の音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。これら操作スイッチ群203、リモコン端末240、マイク231により、種々の指示を入力することが可能である。
【0043】
地図データ入力器202は、ある単位(メッシュ)毎の地図のイメージである地図メッシュデータ、位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路データ等を含む各種データを記憶媒体220から入力し、記憶装置205に記憶するための装置である。記憶媒体220としては、そのデータ量からCD−ROM(Compact Disk-Read Only Memory)、DVD(Digital Versatile Disk)、HDD(Hard Disk Drive)等を用いるのが一般的であるが、例えばメモリカード等の他の記憶媒体を用いてもよい。
【0044】
記憶装置205は、例えば周知のハードディスクドライブ(以下、HDDと略す)であり、周知のナビゲーションプログラム205pの他、表示装置400に地図を表示するための地図データ(地図情報)21mと、地図上の地点毎に、当該地点のポインタの勾配を反映した勾配反映データ(勾配反映情報)205gと、該勾配反映データ205gに基づいてポインタ移動方向に定められる経路の勾配値を算出する勾配値算出プログラム205cとを記憶する。これらのプログラム及びデータは、地図データ入力器202を介して記憶媒体220からそのデータの追加・更新を行なうことが可能である。このHDD205が本発明の地図情報記憶部及び勾配反映情報記憶部として機能する。
【0045】
地図データ205mは、位置検出の精度向上のためのいわゆるマップマッチング用データ及び道路の接続を表した道路データ等を含むものである。具体的には、表示用となる所定の地図イメージ情報と、リンク情報やノード情報等を含む道路網情報とから構成されている。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成されている。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標、左右折車線数、接続先道路リンク等から構成される。
【0046】
勾配反映データ205gは、表示装置400に表示される地図の各地点に対応付する標高データ(標高情報)であり、地図データ205mの各地点に対応付けた形でHDD205に記憶されている。
【0047】
外部メモリ208は、EEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能なデバイスによって構成され、ナビゲーション装置200の動作に必要な情報およびデータが記憶されている。なお、外部メモリ208は、ナビゲーション装置200がオフ状態になっても記憶内容が保持されるようになっている。なお、外部メモリ208の代わりにナビゲーション装置200の動作に必要な情報およびデータをHDD21に記憶してもよい。さらに、ナビゲーション装置200の動作に必要な情報およびデータを外部メモリ208とHDD205に分けて記憶してもよい。
【0048】
送受信機(車両インターフェース部)206は、各種の外部情報を入出力するためのものであり、例えば道路に沿って設けられた送信機(図示せず)から出力される光ビーコン、または電波ビーコンによってVICS(Vehicle Information and Communication System:道路交通情報通信システム)センタ500から道路交通情報を受信、あるいはFM多重放送を受信するための装置である。また、送受信機206を用いてインターネット等の外部ネットワークに接続可能な構成としてもよい。
【0049】
無線通信機207は、狭域通信を行なうためのものであり、他車両のナビゲーション装置との通信が可能に構成されている。無線通信機207としては、例えばDSRC、BlueTooth(登録商標)、無線LAN、UWB、等が使用されている。
【0050】
音声出力装置250は、アンプやスピーカから構成され、車両用ナビゲーション装置2からの音声案内を出力する。具体的には、音声出力装置250は周知の音声合成回路を備えて構成されており、ナビプログラム205pの指令により、外部メモリ208あるいはHDD205に記憶されるデジタル音声データが音声合成回路においてアナログ音声に変換されたものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき必要に応じて繋ぎ合わせる録音編集方式、文字入力情報からそれに対応する音声を合成するテキスト合成方式などがある。
【0051】
表示装置400は、地図表示画面やTV画面等の各種表示を行なうための周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御回路210から送られる表示指令および表示画面データに基づいて表示を行なう。表示装置400としては、他に有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0052】
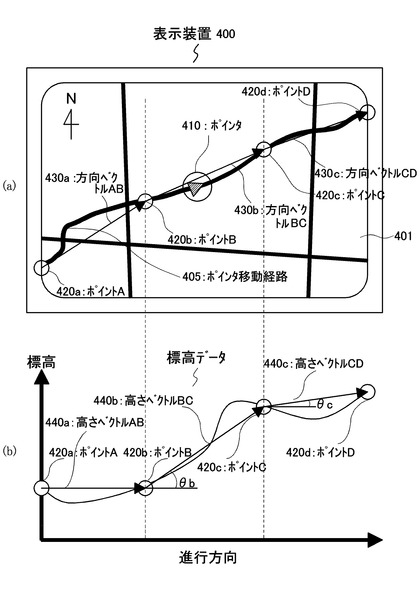
この表示装置400の画面には、図5に示すように、地図イメージデータ(以下、地図ともいう)401が表示可能であるとともに、表示された地図401上でポインタ(位置指示マークやし車両位置マーク等を含む)410や走行案内経路(誘導経路、ルートともいう)405等の付加データを、地図401上に重ね表示することができるとともに、経路案内の設定および経路誘導中の案内や画面の切り換え操作を行なうためのメニューアイコン(図示なし)等を表示することができる。
【0053】
制御回路210は、通常のコンピュータとして構成されており、周知のCPU(Central Processing Unit)211、ROM(Read Only Memory)212、RAM(Random Access Memory)213、I/O(Input/Output)214、およびこれらを接続するバスライン215が備えられている。CPU211は、後述するハードディスクドライブ(HDD)205に記憶されたナビゲーションプログラム205pや勾配値算出プログラム205c、ポインタ移動プログラム205s等の各種プログラムおよびデータにより制御を行なう。HDD205へのデータの読み書きの制御はCPU211によって行なわれる。RAM213はワークメモリを備えており、このワークメモリを作業領域とする形で各種プログラムが実行される。
【0054】
ナビゲーションプログラム205pは、位置検出器201からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、HDD205から読み込んだ現在位置付近の地図や、ハプティックデバイス2の操作によって指示された範囲の地図等を表示装置400に表示する地図表示処理や、HDD205に格納された地点データに基づき、ハプティックデバイス2の操作に従って目的地となる施設を選択し、現在位置から目的地までの最適な経路を検索し、最適な走行案内経路を設定する走行案内経路設定処理と、設定された走行案内経路に沿って経路案内を行なう経路案内処理等を実行するものである。この自動的に最適な経路を設定する手法としては、ダイクストラ法等の周知の手法が知られている。なお、ナビゲーションプログラム205pは、CPU211により実行されることで本発明の地図表示手段及び走行案内経路設定手段として機能する。
【0055】
勾配値算出プログラム205cは、ポインタを表示装置400に表示された地図上の予め定められた経路に沿って相対移動させ、それに伴ってポインタが順次通過する各地点の勾配反映データ205gをHDD205から取得し、それら地点における勾配値を算出するプログラムである。勾配値算出プログラム205cは、CPU211により実行されることで勾配反映情報取得手段及び勾配算出手段として機能する。
【0056】
ポインタ移動表示プログラム205sは、表示装置400上に表示される地図上に表示されるポインタは該地図に対する相対移動表示するためのプログラムであり、ナビゲーションプログラム205pと連動して実行されるものである。本実施形態においては、ナビゲーション操作の中で、少なくとも以下の3種の移動モードを設定可能である。具体的には、表示装置400に画面表示された位置指示マーク(ポインタ)を同じく画面表示された地図上で、トラックボール部21のマニュアル操作に対応する形で移動するマニュアル指示モードと、表示装置400の画面上の固定位置に位置指示マーク(ポインタ)の基準位置を定め、ポインタの指示位置が地図上にて基準位置から相対移動するトラックボール部21の操作に伴い、地図を画面上にて該相対移動に対応した向きに及び速度でスクロールする指示方向スクロールモードと、表示装置400の画面上に表示される自車両位置マーク(ポインタ)を、前記地図上の道路に沿って設定された自車両の走行案内経路上を自動スクロール(いわゆるオンルートスクロール)するオンルートスクロールモードである。 なお、マニュアル指示モードではポインタの移動ルートが本発明の経路として定められ、指示方向スクロールモードでは基準位置とスクロール方向にて本発明の経路が定められ、オンルートスクロールモードでは、走行案内経路が本発明の経路として定められる。このポインタ移動表示プログラム205sは、CPU211により実行されることでポインタ移動表示手段(地図スクロール手段)、基準位置設定手段、ポインタ移動手段として機能する。
【0057】
このようにして構成される本発明の入力システム1では、ナビゲーション装置200側で勾配値算出プログラム205cを実行することで、HDD205に記憶される勾配反映データ205gを取得し、ポインタ移動経路上の各地点間の勾配値を算出し、その算出結果をハプティックデバイス2のコントローラ10側に送出する。そして、ハプティックデバイス2側では、その勾配値を反映した形でトラックボール部21の操作軸線20の中立角度位置を変化させるものである。これにより、ポインタ移動が操作部の非操作状態において生ずる場合、例えばオンルートスクロール等の場合であっても、トラックボール部21の中立角度位置の傾斜変化駆動により、操作者はトラックボール部21に軽く触れているだけで地図上の勾配の大小を認識することが可能となっている。
【0058】
以下、ナビゲーション装置200側の勾配値算出プログラム205cが実行する、ポインタ移動経路上の各地点間の勾配値算出方法について説明する。本発明においては、ポインタの地図に対する相対移動やポインタ移動経路設定により、予め定められるポインタ移動経路を1つ又は複数の区間に分割し、その分割された区間(勾配算出区間)毎に、該区間両端の標高データに基づいて勾配値を算出する。これは、上記したマニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれにも適用可能な方法である。以下では、図5を用い、オンルートスクロールモードを例にしてその詳細を説明する。
【0059】
オンルートスクロール時、表示装置400には、図5に示すように、地図上の道路に沿った走行案内経路(推奨走行道路図)405が描画される。そして、画面中央を基準位置と定め、該基準位置に自車両位置マーク(ポインタ)410を固定し、その状態でポインタ410が走行案内経路405上に沿って移動するよう、画面表示される地図がスクロール表示される。なお、この走行案内経路は、上述の経路検索時に検索され、表示装置400に表示されるよう設定されるものである。
【0060】
このオンルートスクロールモード表示に際して、本実施形態では、まず、表示装置400に表示された走行案内経路が、表示縮尺に応じて予め定められた単位距離毎に分割される。ここでは、図5に示すように、走行案内経路405上にポイントA:420a、ポイントB:420b、ポイントC:420c、ポイントD:420dの様な、傾斜角度制御変更ポイントを作成する形で、これらポイント間毎に経路を分割し、1以上の勾配算出区間を定める。そして、自車両位置マーク410の移動する方向ベクトルとして、各区間に対応する方向ベクトルAB(430a)、方向ベクトルBC(430b)、方向ベクトルCD(430c)を作成する。なお、これらの方向ベクトルは、表示画面上の平面座標系に基づいて定められるものである。
【0061】
これに加え、走行案内経路405上におけるポイントA(420a)、ポイントB(420b)、ポイントC(420c)、ポイントD(420d)の標高データ205gを用いて、各区間に対応する高さベクトルAB(440a)、高さベクトルBC(440b)、高さベクトルCD(440c)、およびこれら高さベクトルAB,BC,CDの水平方向に対する傾斜角度(勾配値)θa、θb、θcを求める。なお、これら高さベクトルは、走行案内経路の進行方向座標と、各ポイントに対して定められた標高データから得られる高さ座標とに基づいて定められるものである。
【0062】
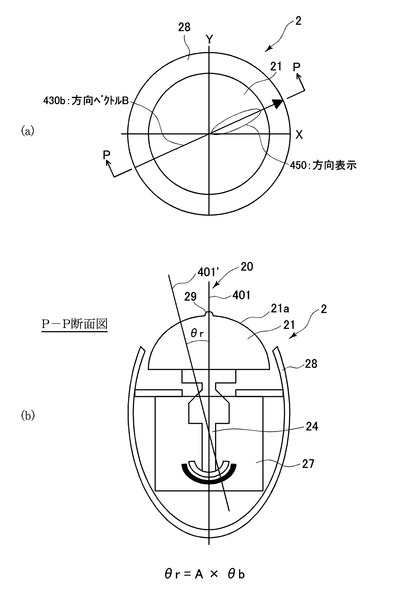
上述の方向ベクトルAB(430a)、方向ベクトルBC(430b)、方向ベクトルCD(430c)と傾斜角度θa、θb、θcを用いて、トラックボール部21の中立角度位置の標準中立角度位置に対する傾斜方向及び傾斜角度を決定することができる。例えば、図5の自車両位置マーク410のポイントでは、図6に示すように、方向ベクトルB(430b)に対応して傾斜方向が決定され、この方向ベクトルB(430b)の逆向き方向にθrだけ、トラックボール部21の中立角度位置が角度位置401から角度位置401´に傾けられて新たに設定される。なお、図6の(a)の中立角度位置の傾斜方向を示す図であり、図6の(b)は同じく中立角度位置の傾斜角度を示す図である。
【0063】
本来、トラックボール部21の中立角度位置の標準中立角度位置に対する傾斜角度θrは、傾斜角度θbと同じであることが望ましい。ところが、ドラックボール部21の傾斜稼動範囲に制限がある(本来はトラックボール部21の操作軸線21が±90°稼動することが望ましいが、実際には、±40°程度)ため、傾斜角度θrは以下の式により変換される。
θr=A×θb
ここで、Aはトラックボール部の稼動範囲係数であり、(トラックボール部21の傾斜可動範囲の絶対値)/90として定められている。本実施形態においてはA=40/90とされている。このようにして、傾斜角度θrを算出することができる。
【0064】
なお、上記実施形態においては、方向ベクトルと傾斜角度(勾配値)とを用いて、各地点におけるトラックボール部21の中立角度位置の、標準中立角度位置に対する傾斜方向および傾斜角度を制御するようにしたが、傾斜方向が画面上から走行案内経路の進行方向から明らかであるから、方向ベクトルを用いずに一方向(例えば、図6の(a)のY軸方向)に固定して中立角度位置が傾斜角度制御されるようにしてもよい。これにより、方向ベクトルの算出を省略でき、演算を簡略化できる。また、特にオンルートスクロールのように固定経路上の勾配を認識するような場合には、傾斜方向を車両の進行方向とすることで、より勾配の認識がし易くなる。
【0065】
また、上記実施形態においては、傾斜角度(勾配値)θrの算出は、道路の傾斜角度を直線補間により行なっているが、それに類似する直線/曲線近似補間を用いてもよい。ところが、こうした場合には、トラックボール部21の傾斜駆動により広範囲にわたる傾斜情報をユーザーに提供しても無意味になる場合がある。従って、本実施形態においては、地図の表示尺度も25000万分の1以上での表示の場合に限って、上記したような中立角度位置変更設定を行なうよう設定されている。
【0066】
また、上記実施形態における勾配算出区間は、表示縮尺に応じて予め定められた単位距離毎に分割されているが、これ以外の手法で設定されてもよい。例えば、勾配値算出のために、ポインタの地図に対する相対移動に伴い該ポインタが通過する経路上の各地点の標高データを予め定められた一定時間(例えば0.5s)毎にサンプリングするように構成し、そのサンプリング時間間隔と相対移動速度とにより勾配算出区間を定めてもよい。この場合、隣接するサンプリング値(標高値サンプリング値)とそのサンプリング時間間隔とに基づいて勾配値を算出することができる。
【0067】
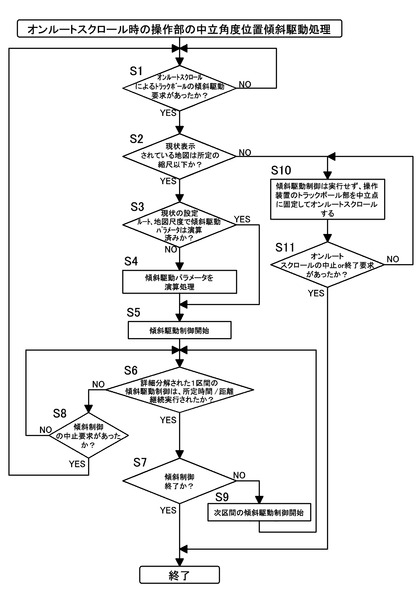
このようにして算出された傾斜角度θrは、ハプティックデバイス2側のコントローラ10に送出される。コントローラ10では、中立角度位置傾斜駆動プログラム102aを実行し、受信した傾斜角度θrに基づいて、実際にトラックボール部21の中立角度位置が変更されるようモータ31,32の駆動制御を行なう。これは、マニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれであっても同様にして行われる。図7は、オンルートスクロール時に実行される中立角度位置傾斜駆動プログラム102aの流れを示すフローチャートであり、以下では、オンルートスクロールモードを例にして、中立角度位置傾斜駆動プログラム102aの流れの詳細を説明する。
【0068】
S1では、オンルートスクロールモード実行に伴うトラックボール部21中心角度位置の傾斜駆動要求があったか否かを判定する。この判定は、ナビゲーション装置200側でオンルートスクロールの実行操作部(操作スイッチ群203に属する:図4参照)の操作の有無と、オンルートスクロールの設定が勾配伝達モードとされているか否かに基づいて判定される。勾配伝達モードと設定され、かつオンルートスクロール実行操作部が操作された場合にはS2に進み、それ以外の場合にはS1に戻る。
【0069】
S2では、表示装置400に現在表示されている地図の表示縮尺が予め定められた縮尺以下となっているか否かを判定する。本実施形態においては、表示縮尺25000を閾値として定めており、該閾値以下の場合にはS3に進み、該閾値を超える場合にはS10に進む。閾値を超えた場合には、S10にて、トラックボール部21の中立角度位置を標準中立角度位置に固定し、S11にてオンルートスクロールの中止又は終了要求が、ナビゲーション装置200の操作スイッチ群の対応するスイッチの操作により与えられない限りはS10に戻り、これを継続する。オンルートスクロールの中止又は終了要求があった場合には、本プログラム102bを終了する。
【0070】
S3では、現在設定されている走行案内経路及び地図表示縮尺において、中立角度位置の傾斜駆動に必要とされる傾斜駆動パラメータの演算が完了しているか否かを判定する。演算が完了している場合にはS5に進み、演算されていない場合にはS4に進み、該傾斜駆動パラメータを演算処理する。傾斜駆動パラメータは、上記したように、表示縮尺に応じて予め定められた単位距離毎に経路に沿って分割するポイント設定を行ない、それらポイント間の方向ベクトルを定めて、それら方向ベクトルとは逆方向に定められる傾斜方向と、それら方向ベクトルの水平方向に対する傾斜角度とを演算する。これらの演算が終了するとS5に進む。
【0071】
S5では、得られた各ポイント間(勾配算出区間)の傾斜駆動パラメータ(傾斜方向と傾斜角度)に基づいて、トラックボール部21の中立角度位置が新たな中立角度位置に設定されるよう、モータ31,32の駆動を開始する。これらの駆動は、予め定められた駆動継続時間又は駆動継続距離が到来するまで継続される。ただし、駆動継続中に駆動制御中止の要求が、例えばナビゲーション装置200の操作スイッチの操作等により与えられた場合には、S1に戻る。こうした中止要求がない場合には、駆動継続時間又は駆動継続距離が到来するまで現在の傾斜駆動パラメータに基づいてモータ31,32の駆動制御が継続される。駆動継続時間又は駆動継続距離が到来するとS7に進む。
【0072】
S7では、中立角度位置駆動制御が終了か否かを判定する。具体的には、次区間の有無を判定して、次区間が存在する場合にはS9に進み、存在しない場合には本プログラム102bを終了する。
【0073】
これにより、オンルートスクロール時にポインタが示す経路上の地点の勾配に応じてトラックボール部21の中立角度位置が刻々と変化し、これに伴い該トラックボール部21が駆動するから、トラックボール部21に触れているだけで、経路の勾配を認識することが可能となる。
【0074】
なお、このトラックボール部21の中立角度位置を変更する際に、走行案内経路の進行方向に対応する領域450を、図6の(a)に示すようにLED39により点灯してもよい。このとき、LED39の輝度を傾斜角度θrの値に対応して変化させてもよい。例えば、この傾斜角度θrが大きいほどLED39の輝度を大とすることで、勾配の大小の認識をトラックボール部32の視認でも行なうことが可能となる。勾配の大小を表示するだけであれば、LED39の点灯領域は進行方向領域450だけでなく、例えば、トラックボール部21の全面であってもよい。
【0075】
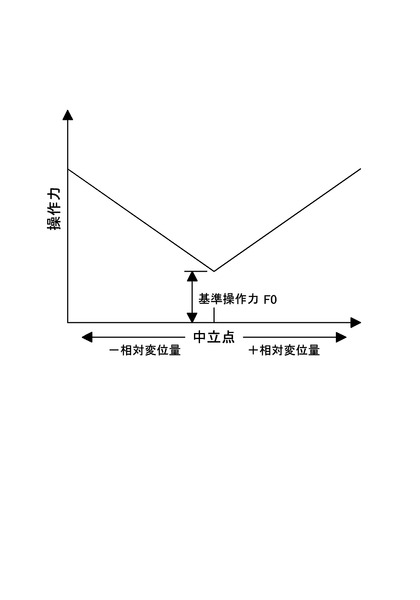
次に、トラックボール部21を操作するときに付与される操作反力を設定する操作反力発生プログラムについて説明する。トラックボール部21の操作反力(操作力)は、非操作状態においては発生しておらず、トラックボール部21を中立角度位置から傾斜させる操作を行なうことで発生する。本実施形態においては、トラックボール部21の中立角度位置(中立点)からの操作ストローク量(相対変位量)に応じて操作反力は変化する。具体的には、図8に示すように、中立角度位置からの操作ストローク量が大となるほど操作反力が大となるよう設定されている。これにより、経路上の各地点毎の勾配を操作反力として認識することが可能となる。
【0076】
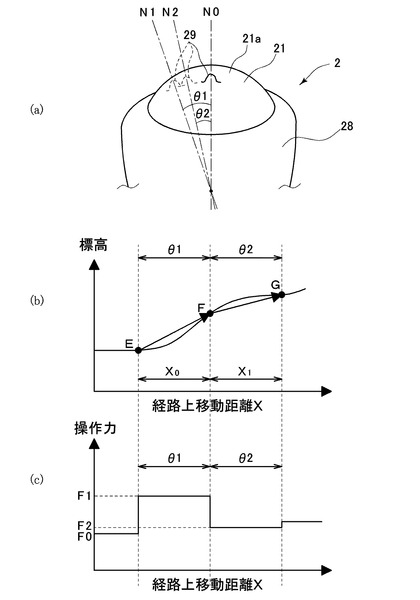
例えば、オンルートスクロール時に、トラックボール部21を変位不動となるよう操作者が手で押さえつけた状態として、トラックボール部21の中立角度位置が、図9に示すように、N0からN1へ、さらにN1からN2へと順次変化する場合を考える。この場合、図9の(b)に示すように、中立角度位置がN0からN1に変化する区間x1では、中立角度位置の傾斜角度がθ1となるよう駆動しており、中立角度位置がN1からN2に変化する区間x2では、中立角度位置の傾斜角度がθ2となるよう駆動している。そして、トラックボール部21は変位不動に押さえつけられているため、区間x1、x2のいずれにおいても、中立角度位置は対応する傾斜角度θ1,θ2に変化するものの、トラックボール部21そのものは不動であり、トラックボール部21の操作軸線20は、押さえつけた時点での中立角度位置N0に常に固定された状態となっている。即ち、操作軸線20は固定されるが中立角度位置が変化するため、相対的な操作ストローク量の変化が生じる。
【0077】
そして、本実施形態においては、図8に示すように、操作ストローク量が大となるほど操作反力も大となるので、トラックボール部21が手で押さえつけられた状態にあると、操作者は操作反力の変化から地図上の勾配を体感することが可能となっている。なお、手を離した場合には、トラックボール部21の操作軸線20は、現在定められている中立角度位置に移動し、操作反力は失われる(操作者がトラックボール操作軸線20を中立角度位置に意図して移動させた場合も同様である)。そして、もう一度トラックボール部21を手で押さえつけた状態とすることで、この押さえつけたときの中立角度位置を基準に再びトラックボール操作軸線20が固定され、その後、押さえつけた状態における操作軸線20の傾斜角度位置を基準とし、中立角度位置の変化に伴って相対的に操作ストローク量が変化し、操作者の手にはそのストローク量に応じた操作反力が伝達される。
【0078】
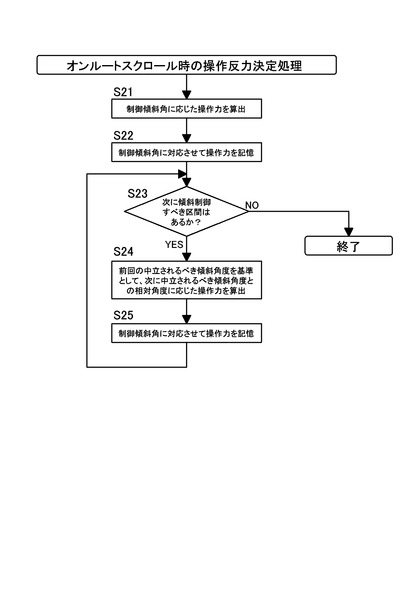
こうした反力発生は、マニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれにおいても同様にして行われるものである。具体的には、操作反力発生プログラム102bの実行により、ポインタが経路上の異なる勾配算出区間に移動するときに、そのときのトラックボール部21の操作軸線20と次の勾配算出区間におけるトラックボール部21の中立角度位置との角度差(相対変位量)を算出し、図8に示す角度差と操作反力との対応関係に基づいて、次区間の操作反力を算出して、モータ31,32を駆動制御する。以下では、図10を用いて、オンルートスクロール時における操作反力発生制御の流れを説明する。
【0079】
図10の操作反力決定処理では、S21及びS22において、経路上の最初の勾配算出区間における操作反力を算出し、これを記憶する。具体的には、地図上における勾配のない水平な地点に対応する中立角度位置を初期中立角度位置として、これをオンルートスクロール時におけるトラックボール部21の初期中立角度位置として定める。この初期中立角度位置と走行案内経路上の最初の勾配算出区間の中立角度位置との角度差を算出し、最初の勾配算出区間の操作反力を算出する。そして、算出された角度差と操作反力とを対応付けた形でRAM103に記憶する。
【0080】
次いで、S23において、走行案内経路上に次の勾配算出区間があるか否かを判定する。ある場合にはS24及びS25に進み、次の勾配算出区間のる操作反力を算出する。具体的には、前回の中立角度位置と次の中立角度位置との角度差を算出し、この勾配算出区間の操作反力を算出する。そして、算出された角度差と操作反力とを対応付けた形でRAM103に記憶し、S23に戻る。このようにして走行案内経路上の全勾配算出区間に対し、角度差と操作反力を対応付けてRAM103に記憶し、全勾配算出区間終了すると本プログラムも終了する。
【0081】
そして、操作反力発生プログラム102bは、ポインタが各勾配算出区間に到来する毎にRAM103に記憶された角度差と操作反力とを読み出し、読み出した角度差に基づいてトラックボール部21の中立角度位置を変更する傾斜駆動を実行し、読み出した操作反力を操作者の操作に応じて発声させる。これを順次繰り返すことで、操作者にトラックボール部21の傾斜駆動と操作反力との大きさとの双方で、走行案内経路上の勾配を認識させることができる。
【0082】
以上、本発明の一実施形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて種々の変更が可能である。
【0083】
例えば、勾配値算出プログラム205cは、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なうものとされ、勾配スムージング手段として機能するように構成してもよい。これにより、操作反力が滑らかに変化するようになるから、操作者に違和感なく道路勾配を認識させることができる。
【0084】
また、中立角度位置変更プログラム102aは、表示装置400の画面上にてポインタが指示する地点の地図上での種別に応じて、勾配値に応じたモータ31,32の駆動制御を互いに異なるパターンにて実施するものとすることができる。
【0085】
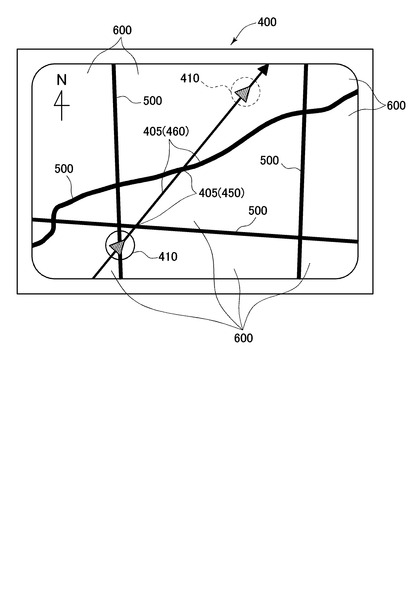
また、図11に示すように、操作反力発生プログラム102bを、ポインタ410が地図上の道路500の外(道路外領域600)に定められた経路460上にある場合の操作反力が、同じく道路500上に定められた経路450上にある場合の操作反力よりも大きく設定されるようモータ31,32を制御するように機能させることができる。例えば、ポインタが指示する地点が道路領域500上であるか否かを判定し、道路領域500上である場合には上記実施形態と同様の反力で、道路外領域600である場合にはそれよりも一定値減じられた反力が出力されるようにすることができる。これにより、特に、マニュアル指示モードにおいて、道路に沿った勾配の認識が容易となる。
【0086】
また、トラックボール部の操作反力を、中立角度位置近辺の予め定められた傾斜角度範囲内において減じられるようにし、遊びを設けることもできる。これにより、トラックボール部21の操作誤差によるわずかな操作軸線20のずれが操作反力制御に反映されないようにでき、操作者に対し操作誤差が除外された適切な操作反力を伝達可能となる。
【0087】
また、中立角度位置変更プログラム102aにおいて、ポインタが通過した地点に対応する勾配値をトラックボール部21の駆動状態に反映させる応答遅れ時間を、ポインタが地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定することもできる。
【図面の簡単な説明】
【0088】
【図1】本発明の入力システムの電気的構成を示す第一のブロック図。
【図2】車載用操作装置の一部であるハプティックデバイスの外観の概略を示す図。
【図3】入力システムの設置例を示す図。
【図4】本発明の入力システムの電気的構成を示す第二のブロック図。
【図5】トラックボールの中立角度位置の変更方法を説明する図。
【図6】トラックボールの中立角度位置の変化状態を説明する図。
【図7】オンルートスクロール時における中立角度位置傾斜駆動処理を示すフローチャート。
【図8】中立角度位置に対するトラックボール操作軸線の相対変位量と操作反力との関係を示すグラフ。
【図9】操作者への操作反力の伝達を説明する図。
【図10】オンルートスクロール時における操作反力決定処理を示すフローチャート。
【図11】道路上と道路外において操作反力を異とする実施形態を説明する図。
【符号の説明】
【0089】
1 入力システム
2 ハプティックデバイス(触覚提示装置)
10 コントローラ
20 操作軸線(トラックボール操作軸線)
21 トラックボール部(操作部)
21a 操作面
28 筐体
29 突起部
31,32 アクチュエータ(モータ:操作反力発生手段、操作部駆動手段)
100 ECU(操作部傾斜駆動制御手段、)
200 ナビゲーション装置(地図表示手段、走行案内経路設定手段、勾配反映情報取得手段、勾配算出手段、ポインタ移動表示手段(地図スクロール手段)、基準位置設定手段、ポインタ移動手段、勾配スムージング手段)
205 記憶装置(地図情報記憶部、勾配反映情報記憶部)
400 表示装置(地図表示装置)
【技術分野】
【0001】
本発明は、入力システムに関する。
【背景技術】
【0002】
電子機器に接続されるマウスやトラックボール等のポインティングデバイスを操作部として用いて、電子機器の動作を操作したり、表示装置の画面上において、その操作方向に対応してポインタ等を移動させたりする入力装置、又は入力システムがある。これらの入力装置や入力システムは、ユーザーによってその操作部を操作されることにより、その操作方向に対応した座標を電子機器に出力するものである。このような操作部は、ナビゲーション装置にも利用されており、操作部の操作により表示装置に表示される地図上のポインタを移動させて、位置指示、あるいは位置選択を行なわせるものがある。
【0003】
近年、こうしたナビゲーション装置において、表示装置に表示される地図の勾配情報をユーザーに認識させたいという要望がある。特許文献1には、ジョイスティックを用いて地図のスクロールを行なう際に、画面上に表示されたポインタが位置するエリアの高度データを抽出して、移動するポインタの高度差に応じてジョイスティックへの反力を発生させ、その高度差(勾配)をユーザーに触感伝達する技術が開示されている。
【特許文献1】特開2004−226301号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、特許文献1においては、ジョイスティックの傾斜操作を行なったときに高度差に応じた反力が発生する構成とされているため、ジョイスティックを操作しなければ高度差を触感できない。ナビゲーション装置等においては、ジョイスティックを傾斜させなくとも画面内容が移動するオンルートスクロール等の画面表示機能が存在するため、こうした場合にユーザーに地図上の高度差を触感伝達することができない。
【0005】
本発明の課題は、表示装置にて表示される地図上の勾配を、表示画面上の操作部の操作を行なわない場合においても認識することができる入力システムを提供することにある。
【課題を解決するための手段及び発明の効果】
【0006】
上記課題を解決するために、本発明の入力システムは、
車両に搭載される地図表示装置の位置入力システムであって、
地図表示装置に地図を表示するための地図情報を記憶する地図情報記憶部と、
該地図情報に基づいて地図表示装置に地図を表示する地図表示手段と、
地図表示装置の画面上に表示される地図上でポインタによる位置指示を行なうための操作部を備え、該操作部は、非操作時において自身の操作軸線が中立角度位置に保持されるとともに、操作時においては地図上で位置指示すべき方向に対応する方向に操作軸線が中立角度位置から傾斜するよう、中立角度位置への復帰力に抗して操作されるポインティングデバイスと、
操作軸線に自発的な角度変化が生ずるように操作部を駆動する操作部駆動手段と、
操作部の操作に応じて、ポインタを地図上の対応する向きに相対移動させるポインタ移動表示手段と、
地図上の地点毎に、当該地点のポインタの移動方向における勾配を反映した勾配反映情報を記憶する勾配反映情報記憶部と、
ポインタを地図上の予め定められた経路に沿って相対移動させるに伴い、該ポインタが経路上にて順次通過する各地点の勾配反映情報を取得する勾配反映情報取得手段と、
取得される該勾配反映情報に基づいて、経路上の勾配値変化を反映した形で操作軸線の傾斜角度位置が変化するように操作部駆動手段を駆動制御する操作部傾斜駆動制御手段と、
を備えたことを特徴とする。
【0007】
上記本発明の構成によると、表示装置に表示される地図のポインタ指示地点の勾配を反映する形で操作部が傾斜状態とされるから、操作部を操作しない状態であっても、操作部を触れてさえいれば、その傾斜動作を触感することができ、その傾斜動作から地図上の勾配を認識することができる。なお、本発明におけるポインタとは、表示された地図上で位置指示を行なうものであり、位置指示を行なう位置指示マークやナビゲーション装置にて走行案内経路上に表示される自車両位置マーク、表示内容に係らず画面上に固定的に基準位置を定める基準位置マーク等を含むものである。
【0008】
本発明の入力システムでは、取得される勾配反映情報に基づいて、操作軸線の中立角度位置を、ポインタが示す経路上の各地点の勾配値に対応した値となるように変更しつつ定める中立角度位置変更手段が設けられ、操作部傾斜駆動制御手段は、操作部の中立角度位置が、中立角度位置変更手段による決定結果に従い変化するように操作部駆動手段を駆動制御することができる。この構成によると、操作部の被操作状態における中立位置が地図上のポインタ指示地点の勾配に応じて変更されるから、操作部の中立位置の変化動作から地図上の勾配を認識することができる。
【0009】
本発明の入力システムは、地図表示装置の画面上の固定位置にポインタの基準位置を定める基準位置設定手段を備え、ポインタ移動表示手段は、ポインタの指示位置が地図上にて基準位置から相対移動するに伴い、地図を画面上にて該相対移動に対応した向きにスクロールする地図スクロール手段を備えることができる。この構成によると、地図のスクロール表示中であっても、操作部の傾斜から、地図スクロール中のポインタ指示地点の傾斜を認識することができる。
【0010】
本発明における勾配反映情報は、各地点の標高情報であり、操作部傾斜駆動制御手段は、ポインタの移動方向に順次定められる勾配算出区間の各両端の標高差分に基づいて、個々の勾配算出区間の勾配値を算出する勾配算出手段を備え、算出された該勾配値に基づいて操作部駆動手段を駆動制御することができる。この構成によると、地図情報の各地点の標高状態から容易に勾配値を算出することができる。
【0011】
本発明における勾配算出手段は、勾配算出区間を経路に沿って一定の区間長を有するものとして定めることができる。一定の区間長が定められていることで勾配算出区間の設定が容易となり、ひいては勾配値の算出が容易となる。
【0012】
本発明の入力システムは、ポインタを経路に沿って予め定められた速度で相対移動させるポインタ移動手段を備え、勾配算出手段は、ポインタが通過する各地点の標高値を一定時間毎にサンプリングする標高値サンプリング手段を備え、隣接する標高値サンプリング値とサンプリング時間間隔とに基づいて勾配値を算出するものとできる。勾配算出区間をサンプリング時間間隔により定めることができるから、ポインタの相対移動速度、言い換えれば、地図のスクロール送り速度の速い場合や遅い場合に応じて、適切にサンプリング時間間隔を定めることができる。そのため、不要な勾配値算出を減じることができる。
【0013】
本発明の入力システムにおける勾配算出手段は、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なう勾配スムージング手段を有するものとできる。急激な勾配変化は操作者に違和感を与える可能性があるから、これをスムージングすることで違和感を低減できる。
【0014】
本発明の入力システムにおける操作部傾斜駆動制御手段は、地図表示装置に表示される地図の表示尺度が予め定められた表示尺度よりも大きい場合にのみ操作部駆動手段の駆動制御を行なうものとできる。表示縮尺が小さい広域表示の場合は勾配認識が不要とされる場合がある。この構成によると、必要とされる表示縮尺においてのみ勾配認識が可能となるよう構成することができる。例えば、表示縮尺が25000分の1以上の表示の場合にのみ操作部の駆動制御を行なうものとできる。
【0015】
本発明の入力システムにおける操作部傾斜駆動制御手段は、ポインタの地図上での移動方向に応じて操作部の駆動傾斜方向を変化させるよう操作部駆動手段の駆動制御を行なうことができる。ポインタの移動方向に対応する方向に操作部が傾斜するから、勾配の向きを容易に認識することができる。
【0016】
本発明の入力システムにおける操作部傾斜駆動制御手段は、ポインタが指示する地点の地図上での種別に応じて、勾配値に応じた操作部駆動手段の駆動制御を互いに異なるパターンにて実施するものとできる。この構成によると、例えば、落石や凍結等といった危険地点が有る場合にはその地点を大勾配地点として操作部の傾斜を大とし、運転者に危険地点の報知を行なうことができる。
【0017】
本発明の入力システムにおいては、操作部に外部から操作力が加えられた場合に、該操作部に予め定められた操作反力を生じさせる操作反力発生手段と、ポインタが地図上の道路外に定められた経路上にある場合の操作反力が、同じく道路上に定められた経路上にある場合の操作反力よりも大きく設定されるよう操作反力発生手段を制御する操作反力制御手段とを有するものとできる。この構成によると、道路上の操作反力が小、道路外の操作反力が大とされるから、道路に沿ったポインタの移動を容易とすることができる。
【0018】
本発明の入力システムにおいては、経路が地図上の道路に沿って定められ、操作部傾斜駆動制御手段は、該道路に沿った勾配変化に基づいて操作部駆動手段の駆動制御を行なうことができる。この構成によると、車両が主として走行する道路について、その勾配変化を認識することが容易となる。
【0019】
本発明の入力システムにおいては、地図上の道路に沿って走行案内経路を設定する走行案内経路設定手段と、
操作部の操作状態とは無関係にポインタを、走行案内経路をトレースする形で自動移動させるポインタ自動移動手段とを備え、操作部傾斜駆動制御手段は、該走行案内経路上を移動するポインタ位置の変化に対応させた形で操作部駆動手段を駆動制御するものとできる。ナビゲーション装置に搭載されるオンルートスクロール等、非操作状態でのスクロール表示中であっても、操作部に手を触れていれば、に沿った勾配を操作部の傾斜から認識することができる。
【0020】
操作部傾斜駆動制御手段は、ポインタが通過した地点に対応する勾配値を操作部の駆動状態に反映させる応答遅れ時間を、ポインタが地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しつつ本発明の実施形態について説明する。
図1は、一実施形態に係る入力システム1の電気的ブロック図の概略を示す図である。入力システム1は、地図表示装置(以下、表示装置という)400の位置入力システムであり、車両に搭載された表示装置400の画面に対応した位置を指定するポインティングデバイスとして構成された、車両のインストルメントパネル等に取り付けられたハプティックデバイス(触感提示装置)2と、これを制御するコントローラ10と、を備える。ハプティックデバイス2は、ユーザーにより操作されるトラックボール部(操作部)21を有しており、コントローラ10は、操作されている方向に抗する操作反力をトラックボール部21に付加するようアクチュエータ(本実施形態においてはモータ)31,32を制御する。以下、各々の詳細について説明する。
【0022】
まず、ハプティックデバイス2について説明する。ハプティックデバイス2は、表示装置400の画面上に表示される地図上で位置指示を行なうためトラックボール部(操作部)21を備え、筐体28がそのトラックボール部21の操作面21aを露出させた状態でこれを保持している。位置指示は、表示装置400に画面表示される位置指示マークや自車両の現在地を示す自車両位置マーク、表示内容に係らず画面上に固定的に基準位置を定める基準位置マークにより行われる。本発明のポインタはこれらのマークの概念を含むものである。また、これらマークによる位置指示を行なうための操作部の操作とは、画面表示された地図に対するこれらマークの相対移動に係る操作であり、例えば、画面表示された地図上で位置指示マークを操作部の動きに対応するように動かす操作や、位置指示マーク、基準位置、又は自車両位置マークを固定してこれらマークに対し地図側を移動させる操作、画面上の定められた経路上で自車両位置マークを自動移動させる設定操作及びその移動経路を設定する操作等を含むものである。
【0023】
図2は、ハプティックデバイス2の外観の概略を示す図である。ハプティックデバイス2は、表示装置400の画面に対応した位置を指示するためのトラックボール部21の他に、その位置に対応付けられた操作を選択するための決定スイッチ201と、元の画面に戻すための戻りスイッチ202とを外面に有している。なお、これらスイッチとは別に、トラックボール部21の操作により調整しようとする車両内の機能を選択する操作部を設け、「カーナビゲーション装置」や「カーエアコン」、「カーオディオ」等の機能を選択可能としてもよい。これにより、ハプティックデバイス2をナビゲーション機能以外の機能にも使用することが可能となる。
【0024】
トラックボール部21は、球面状の操作面21aを有しており、トラックボール内部には、制御状態を点灯表示で知らせるためのLED部39が設けられている。トラックボール部21の操作面を形成する部材は透光性部材により形成されており、LED部39の発光が球面状の操作面21aを介して視認可能とされている。
【0025】
トラックボール部21の裏側からは支柱24が延出し、収納部27に差し込まれている。支柱24の途中には球状部22が形成され、収納部27に設けられている軸受23でこれを支持することにより、支柱24は収納部27に対して揺動自在に支承されている。このトラックボール部21は、非操作時において自身の操作軸線20が中立角度位置に保持されるとともに、操作時においては表示装置400に表示される地図上で位置指示すべき方向に対応する方向に操作軸線が中立角度位置から傾斜するよう、中立角度位置への操作反力(復帰力)に抗して操作される。
【0026】
このように構成されることで、トラックボール部21は、ユーザーが接触する接触面である操作面21aに沿った方向に可動可能とされており、ユーザーが自身の手(指先)とトラックボール部21との摩擦力を利用して操作を行なうタッチ操作式とされている。
【0027】
また、トラックボール部21は、操作面21aに沿った半球状の可動域とされ、その範囲内で自在に動かすことができる。すなわち、ユーザーは、自身の手(指先)が操作面21aに接触した箇所から、その接触面の面内方向のいずれの方向(360度)にも動かすことができる(可動域の端部を除く)。
【0028】
トラックボール部21の操作面21aは、軸受23に指示されている球状部22を中心とする球面とされている。また、操作面21aの中央部には、ユーザーに中心位置を知らせるための突起部29が設けられている。これにより、トラックボール部21の操作軸線20が傾斜したことが視認可能となる。
【0029】
収納部27には、トラックボール部21が操作されている方向(操作方向)を検出するオプティカルイメージセンサ(操作入力変位検出部)41が設置されている。オプティカルイメージセンサ41は、図示しない光源とともに収納部27内の底面に実装されている。他方、トラックボール部21から延出する支柱24の下端には、軸受23に支持されている球状部22を中心とする球面状の端面25aを有する下端部25が設けられており、この端面25aには、所定の検出パターンが形成されている。
【0030】
操作方向の検出には、光源から光を照射し、下端部25の端面25aに形成された検出パターンの像を、導光管26を介してオプティカルイメージセンサ41に導くことにより、支柱24の揺動方向と揺動量(揺動角度)、すなわちX−Y直交座標におけるトラックボール部21の操作量を検出することができるようになっている。オプティカルイメージセンサ41により検出された位置検出信号は、コントローラ10に対してフィードバックされる。なお、操作方向検出手段としては、直交するX軸,Y軸にそれぞれ設けられたフォトエンコーダ等を適用することもできる。
【0031】
ポインティングデバイスであるハプティックデバイス2の操作部であるトラックボール部21は、二次元操作自由度を有するものであり、操作入力変位検出部であるオプティカルイメージセンサ41は、当該操作部による二次元操作入力変位を検出するものである。
【0032】
収納部27には、トラックボール部21に対して操作が許容される方向に沿って力を付加することが可能なアクチュエータとしてのモータ31,32も設置されている。モータ31,32は、直交するX軸,Y軸に対してそれぞれ設けられており、支柱24と図示しないシャフトを介して接続され、その回転運動を軸線方向に沿った直線運動に変換して支柱24に伝えることで、トラックボール部21に対して力を与える。このモータ31,32は、コントローラ10からの駆動信号に基づき、トラックボール部21に対して操作方向に抗する操作反力を付加するように動作するものであり、本発明の操作反力発生手段として機能する。また、このモータ31,32は、トラックボール部21の操作軸線に自発的な角度変化が生ずるようにトラックボール部21を駆動する操作部駆動手段としても機能する。
【0033】
次にコントローラ10について説明する。コントローラ10は、ハプティックデバイス2の制御を司るコントローラECU(Electronic Control Unit)100を備える。コントローラECU100は、CPU101,ROM102,RAM103,入力ポート109,出力ポート108がバス105を介して接続されたマイクロプロセッサからなる。また、車内ネットワークを構築するシリアル通信バス50とコントローラECU100内部のバス105とは、シリル通信インターフェース(I/F)106を介して接続されている。ROM102は、CPU101が実行するプログラム及びそれに必要なデータを記憶しており、RAM103は、CPU101がこれらプログラムを実行する際に作業領域として利用される。
【0034】
また、コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号をデジタル変換して入力ポート109に入力するA/D変換回路45も備える。また、コントローラ10は、オプティカルイメージセンサ41からフィードバックされた位置検出信号を基にコントローラECU100で演算され、出力ポート108から出力された制御信号に基づいてハプティックデバイス2に内蔵されたモータ31,32を駆動するドライバ回路35も備える。
【0035】
コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号によってトラックボール部21が操作されている方向を検知すると、その操作方向に抗する操作反力を付加するようにモータ31,32を駆動する。
【0036】
シリアル通信バス50には、車両のインストルメントパネル300に配された表示装置400が接続されており(図3参照)、コントローラ10は、オプティカルイメージセンサ41からフィードバックされる位置検出信号や決定スイッチ201の押下検出信号を表示装置400へ送信する。表示装置400は、位置検出信号や押下検出信号を受信すると、トラックボール部21の操作方向に対応付けて画面に表示されている各種操作を実行するための処理を行なう。このように、入力システム1は、表示装置400の画面に対応した位置を指定するポインティングデバイスとして機能する。
【0037】
また、ROM102には、トラックボール部21の操作軸線20を中立角度位置に復帰させるための操作反力を発生させる操作反力発生プログラム102bと、後述するトラックボール部21の操作軸線の傾斜角度位置が変化するように駆動制御する中立角度位置傾斜駆動プログラム102aとが記憶されている。なお、この操作反力発生プログラム102bは、CPU101により実行されることで本発明の操作反力制御手段として機能するものであり、中立角度位置傾斜駆動プログラム102aは、CPU101により実行されることで本発明の操作部傾斜駆動制御手段として機能するものである。
【0038】
図3に本発明の入力システム1の設置例を示す。入力システム1は、車両のインストルメントパネル300の前面に備えられたナビゲーション装置200の入力システムとして、ナビゲーション装置200の近傍に備えられている。
【0039】
次にナビゲーション装置200について説明する。図4は、車両用ナビゲーション200の構成例である。車両用ナビゲーション装置200は、位置検出器201、地図データ入力器202、操作スイッチ群203、リモートコントロール(以下リモコンと称する)センサ204、記憶装置205、送受信機206、無線通信機207、外部メモリ208、音声認識ユニット230、音声出力装置250、表示装置400、上記したコントローラ10、及びこれらが接続される制御回路210を備えている。
【0040】
位置検出器201は、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ201aと、角速度を検出することよって方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ201bと、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ201cと、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機201Dとを備えている。これらのセンサ等201a,201b,201c,201dは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用されるようになっている。なお、精度によっては、前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。
【0041】
操作スイッチ群203は、例えば表示装置400と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置400の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が2次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。これら操作スイッチ群203およびリモコン端末240によって、種々の指示を入力することが可能である。本実施形態においては、表示装置に表示された地図上で、該地図に対し相対移動する形で表示可能なポインタの移動モードを設定する操作スイッチ、及びそれら移動モードに関する詳細設定を行なう操作スイッチなどが含まれる。移動モードの詳細設定に関しては、例えばトラックボール部21の中立角度位置変更により地図上の勾配伝達を行なう勾配伝達モードのオン・オフや、スクロール表示等の場合のスクロール表示速度等の設定である。
【0042】
また、マイク231および音声認識ユニット230を用いて種々の指示を入力することも可能である。これは、マイク231から入力された音声信号を、音声認識ユニット230において周知の隠れマルコフモデル等の音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。これら操作スイッチ群203、リモコン端末240、マイク231により、種々の指示を入力することが可能である。
【0043】
地図データ入力器202は、ある単位(メッシュ)毎の地図のイメージである地図メッシュデータ、位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路データ等を含む各種データを記憶媒体220から入力し、記憶装置205に記憶するための装置である。記憶媒体220としては、そのデータ量からCD−ROM(Compact Disk-Read Only Memory)、DVD(Digital Versatile Disk)、HDD(Hard Disk Drive)等を用いるのが一般的であるが、例えばメモリカード等の他の記憶媒体を用いてもよい。
【0044】
記憶装置205は、例えば周知のハードディスクドライブ(以下、HDDと略す)であり、周知のナビゲーションプログラム205pの他、表示装置400に地図を表示するための地図データ(地図情報)21mと、地図上の地点毎に、当該地点のポインタの勾配を反映した勾配反映データ(勾配反映情報)205gと、該勾配反映データ205gに基づいてポインタ移動方向に定められる経路の勾配値を算出する勾配値算出プログラム205cとを記憶する。これらのプログラム及びデータは、地図データ入力器202を介して記憶媒体220からそのデータの追加・更新を行なうことが可能である。このHDD205が本発明の地図情報記憶部及び勾配反映情報記憶部として機能する。
【0045】
地図データ205mは、位置検出の精度向上のためのいわゆるマップマッチング用データ及び道路の接続を表した道路データ等を含むものである。具体的には、表示用となる所定の地図イメージ情報と、リンク情報やノード情報等を含む道路網情報とから構成されている。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成されている。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標、左右折車線数、接続先道路リンク等から構成される。
【0046】
勾配反映データ205gは、表示装置400に表示される地図の各地点に対応付する標高データ(標高情報)であり、地図データ205mの各地点に対応付けた形でHDD205に記憶されている。
【0047】
外部メモリ208は、EEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能なデバイスによって構成され、ナビゲーション装置200の動作に必要な情報およびデータが記憶されている。なお、外部メモリ208は、ナビゲーション装置200がオフ状態になっても記憶内容が保持されるようになっている。なお、外部メモリ208の代わりにナビゲーション装置200の動作に必要な情報およびデータをHDD21に記憶してもよい。さらに、ナビゲーション装置200の動作に必要な情報およびデータを外部メモリ208とHDD205に分けて記憶してもよい。
【0048】
送受信機(車両インターフェース部)206は、各種の外部情報を入出力するためのものであり、例えば道路に沿って設けられた送信機(図示せず)から出力される光ビーコン、または電波ビーコンによってVICS(Vehicle Information and Communication System:道路交通情報通信システム)センタ500から道路交通情報を受信、あるいはFM多重放送を受信するための装置である。また、送受信機206を用いてインターネット等の外部ネットワークに接続可能な構成としてもよい。
【0049】
無線通信機207は、狭域通信を行なうためのものであり、他車両のナビゲーション装置との通信が可能に構成されている。無線通信機207としては、例えばDSRC、BlueTooth(登録商標)、無線LAN、UWB、等が使用されている。
【0050】
音声出力装置250は、アンプやスピーカから構成され、車両用ナビゲーション装置2からの音声案内を出力する。具体的には、音声出力装置250は周知の音声合成回路を備えて構成されており、ナビプログラム205pの指令により、外部メモリ208あるいはHDD205に記憶されるデジタル音声データが音声合成回路においてアナログ音声に変換されたものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき必要に応じて繋ぎ合わせる録音編集方式、文字入力情報からそれに対応する音声を合成するテキスト合成方式などがある。
【0051】
表示装置400は、地図表示画面やTV画面等の各種表示を行なうための周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御回路210から送られる表示指令および表示画面データに基づいて表示を行なう。表示装置400としては、他に有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0052】
この表示装置400の画面には、図5に示すように、地図イメージデータ(以下、地図ともいう)401が表示可能であるとともに、表示された地図401上でポインタ(位置指示マークやし車両位置マーク等を含む)410や走行案内経路(誘導経路、ルートともいう)405等の付加データを、地図401上に重ね表示することができるとともに、経路案内の設定および経路誘導中の案内や画面の切り換え操作を行なうためのメニューアイコン(図示なし)等を表示することができる。
【0053】
制御回路210は、通常のコンピュータとして構成されており、周知のCPU(Central Processing Unit)211、ROM(Read Only Memory)212、RAM(Random Access Memory)213、I/O(Input/Output)214、およびこれらを接続するバスライン215が備えられている。CPU211は、後述するハードディスクドライブ(HDD)205に記憶されたナビゲーションプログラム205pや勾配値算出プログラム205c、ポインタ移動プログラム205s等の各種プログラムおよびデータにより制御を行なう。HDD205へのデータの読み書きの制御はCPU211によって行なわれる。RAM213はワークメモリを備えており、このワークメモリを作業領域とする形で各種プログラムが実行される。
【0054】
ナビゲーションプログラム205pは、位置検出器201からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、HDD205から読み込んだ現在位置付近の地図や、ハプティックデバイス2の操作によって指示された範囲の地図等を表示装置400に表示する地図表示処理や、HDD205に格納された地点データに基づき、ハプティックデバイス2の操作に従って目的地となる施設を選択し、現在位置から目的地までの最適な経路を検索し、最適な走行案内経路を設定する走行案内経路設定処理と、設定された走行案内経路に沿って経路案内を行なう経路案内処理等を実行するものである。この自動的に最適な経路を設定する手法としては、ダイクストラ法等の周知の手法が知られている。なお、ナビゲーションプログラム205pは、CPU211により実行されることで本発明の地図表示手段及び走行案内経路設定手段として機能する。
【0055】
勾配値算出プログラム205cは、ポインタを表示装置400に表示された地図上の予め定められた経路に沿って相対移動させ、それに伴ってポインタが順次通過する各地点の勾配反映データ205gをHDD205から取得し、それら地点における勾配値を算出するプログラムである。勾配値算出プログラム205cは、CPU211により実行されることで勾配反映情報取得手段及び勾配算出手段として機能する。
【0056】
ポインタ移動表示プログラム205sは、表示装置400上に表示される地図上に表示されるポインタは該地図に対する相対移動表示するためのプログラムであり、ナビゲーションプログラム205pと連動して実行されるものである。本実施形態においては、ナビゲーション操作の中で、少なくとも以下の3種の移動モードを設定可能である。具体的には、表示装置400に画面表示された位置指示マーク(ポインタ)を同じく画面表示された地図上で、トラックボール部21のマニュアル操作に対応する形で移動するマニュアル指示モードと、表示装置400の画面上の固定位置に位置指示マーク(ポインタ)の基準位置を定め、ポインタの指示位置が地図上にて基準位置から相対移動するトラックボール部21の操作に伴い、地図を画面上にて該相対移動に対応した向きに及び速度でスクロールする指示方向スクロールモードと、表示装置400の画面上に表示される自車両位置マーク(ポインタ)を、前記地図上の道路に沿って設定された自車両の走行案内経路上を自動スクロール(いわゆるオンルートスクロール)するオンルートスクロールモードである。 なお、マニュアル指示モードではポインタの移動ルートが本発明の経路として定められ、指示方向スクロールモードでは基準位置とスクロール方向にて本発明の経路が定められ、オンルートスクロールモードでは、走行案内経路が本発明の経路として定められる。このポインタ移動表示プログラム205sは、CPU211により実行されることでポインタ移動表示手段(地図スクロール手段)、基準位置設定手段、ポインタ移動手段として機能する。
【0057】
このようにして構成される本発明の入力システム1では、ナビゲーション装置200側で勾配値算出プログラム205cを実行することで、HDD205に記憶される勾配反映データ205gを取得し、ポインタ移動経路上の各地点間の勾配値を算出し、その算出結果をハプティックデバイス2のコントローラ10側に送出する。そして、ハプティックデバイス2側では、その勾配値を反映した形でトラックボール部21の操作軸線20の中立角度位置を変化させるものである。これにより、ポインタ移動が操作部の非操作状態において生ずる場合、例えばオンルートスクロール等の場合であっても、トラックボール部21の中立角度位置の傾斜変化駆動により、操作者はトラックボール部21に軽く触れているだけで地図上の勾配の大小を認識することが可能となっている。
【0058】
以下、ナビゲーション装置200側の勾配値算出プログラム205cが実行する、ポインタ移動経路上の各地点間の勾配値算出方法について説明する。本発明においては、ポインタの地図に対する相対移動やポインタ移動経路設定により、予め定められるポインタ移動経路を1つ又は複数の区間に分割し、その分割された区間(勾配算出区間)毎に、該区間両端の標高データに基づいて勾配値を算出する。これは、上記したマニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれにも適用可能な方法である。以下では、図5を用い、オンルートスクロールモードを例にしてその詳細を説明する。
【0059】
オンルートスクロール時、表示装置400には、図5に示すように、地図上の道路に沿った走行案内経路(推奨走行道路図)405が描画される。そして、画面中央を基準位置と定め、該基準位置に自車両位置マーク(ポインタ)410を固定し、その状態でポインタ410が走行案内経路405上に沿って移動するよう、画面表示される地図がスクロール表示される。なお、この走行案内経路は、上述の経路検索時に検索され、表示装置400に表示されるよう設定されるものである。
【0060】
このオンルートスクロールモード表示に際して、本実施形態では、まず、表示装置400に表示された走行案内経路が、表示縮尺に応じて予め定められた単位距離毎に分割される。ここでは、図5に示すように、走行案内経路405上にポイントA:420a、ポイントB:420b、ポイントC:420c、ポイントD:420dの様な、傾斜角度制御変更ポイントを作成する形で、これらポイント間毎に経路を分割し、1以上の勾配算出区間を定める。そして、自車両位置マーク410の移動する方向ベクトルとして、各区間に対応する方向ベクトルAB(430a)、方向ベクトルBC(430b)、方向ベクトルCD(430c)を作成する。なお、これらの方向ベクトルは、表示画面上の平面座標系に基づいて定められるものである。
【0061】
これに加え、走行案内経路405上におけるポイントA(420a)、ポイントB(420b)、ポイントC(420c)、ポイントD(420d)の標高データ205gを用いて、各区間に対応する高さベクトルAB(440a)、高さベクトルBC(440b)、高さベクトルCD(440c)、およびこれら高さベクトルAB,BC,CDの水平方向に対する傾斜角度(勾配値)θa、θb、θcを求める。なお、これら高さベクトルは、走行案内経路の進行方向座標と、各ポイントに対して定められた標高データから得られる高さ座標とに基づいて定められるものである。
【0062】
上述の方向ベクトルAB(430a)、方向ベクトルBC(430b)、方向ベクトルCD(430c)と傾斜角度θa、θb、θcを用いて、トラックボール部21の中立角度位置の標準中立角度位置に対する傾斜方向及び傾斜角度を決定することができる。例えば、図5の自車両位置マーク410のポイントでは、図6に示すように、方向ベクトルB(430b)に対応して傾斜方向が決定され、この方向ベクトルB(430b)の逆向き方向にθrだけ、トラックボール部21の中立角度位置が角度位置401から角度位置401´に傾けられて新たに設定される。なお、図6の(a)の中立角度位置の傾斜方向を示す図であり、図6の(b)は同じく中立角度位置の傾斜角度を示す図である。
【0063】
本来、トラックボール部21の中立角度位置の標準中立角度位置に対する傾斜角度θrは、傾斜角度θbと同じであることが望ましい。ところが、ドラックボール部21の傾斜稼動範囲に制限がある(本来はトラックボール部21の操作軸線21が±90°稼動することが望ましいが、実際には、±40°程度)ため、傾斜角度θrは以下の式により変換される。
θr=A×θb
ここで、Aはトラックボール部の稼動範囲係数であり、(トラックボール部21の傾斜可動範囲の絶対値)/90として定められている。本実施形態においてはA=40/90とされている。このようにして、傾斜角度θrを算出することができる。
【0064】
なお、上記実施形態においては、方向ベクトルと傾斜角度(勾配値)とを用いて、各地点におけるトラックボール部21の中立角度位置の、標準中立角度位置に対する傾斜方向および傾斜角度を制御するようにしたが、傾斜方向が画面上から走行案内経路の進行方向から明らかであるから、方向ベクトルを用いずに一方向(例えば、図6の(a)のY軸方向)に固定して中立角度位置が傾斜角度制御されるようにしてもよい。これにより、方向ベクトルの算出を省略でき、演算を簡略化できる。また、特にオンルートスクロールのように固定経路上の勾配を認識するような場合には、傾斜方向を車両の進行方向とすることで、より勾配の認識がし易くなる。
【0065】
また、上記実施形態においては、傾斜角度(勾配値)θrの算出は、道路の傾斜角度を直線補間により行なっているが、それに類似する直線/曲線近似補間を用いてもよい。ところが、こうした場合には、トラックボール部21の傾斜駆動により広範囲にわたる傾斜情報をユーザーに提供しても無意味になる場合がある。従って、本実施形態においては、地図の表示尺度も25000万分の1以上での表示の場合に限って、上記したような中立角度位置変更設定を行なうよう設定されている。
【0066】
また、上記実施形態における勾配算出区間は、表示縮尺に応じて予め定められた単位距離毎に分割されているが、これ以外の手法で設定されてもよい。例えば、勾配値算出のために、ポインタの地図に対する相対移動に伴い該ポインタが通過する経路上の各地点の標高データを予め定められた一定時間(例えば0.5s)毎にサンプリングするように構成し、そのサンプリング時間間隔と相対移動速度とにより勾配算出区間を定めてもよい。この場合、隣接するサンプリング値(標高値サンプリング値)とそのサンプリング時間間隔とに基づいて勾配値を算出することができる。
【0067】
このようにして算出された傾斜角度θrは、ハプティックデバイス2側のコントローラ10に送出される。コントローラ10では、中立角度位置傾斜駆動プログラム102aを実行し、受信した傾斜角度θrに基づいて、実際にトラックボール部21の中立角度位置が変更されるようモータ31,32の駆動制御を行なう。これは、マニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれであっても同様にして行われる。図7は、オンルートスクロール時に実行される中立角度位置傾斜駆動プログラム102aの流れを示すフローチャートであり、以下では、オンルートスクロールモードを例にして、中立角度位置傾斜駆動プログラム102aの流れの詳細を説明する。
【0068】
S1では、オンルートスクロールモード実行に伴うトラックボール部21中心角度位置の傾斜駆動要求があったか否かを判定する。この判定は、ナビゲーション装置200側でオンルートスクロールの実行操作部(操作スイッチ群203に属する:図4参照)の操作の有無と、オンルートスクロールの設定が勾配伝達モードとされているか否かに基づいて判定される。勾配伝達モードと設定され、かつオンルートスクロール実行操作部が操作された場合にはS2に進み、それ以外の場合にはS1に戻る。
【0069】
S2では、表示装置400に現在表示されている地図の表示縮尺が予め定められた縮尺以下となっているか否かを判定する。本実施形態においては、表示縮尺25000を閾値として定めており、該閾値以下の場合にはS3に進み、該閾値を超える場合にはS10に進む。閾値を超えた場合には、S10にて、トラックボール部21の中立角度位置を標準中立角度位置に固定し、S11にてオンルートスクロールの中止又は終了要求が、ナビゲーション装置200の操作スイッチ群の対応するスイッチの操作により与えられない限りはS10に戻り、これを継続する。オンルートスクロールの中止又は終了要求があった場合には、本プログラム102bを終了する。
【0070】
S3では、現在設定されている走行案内経路及び地図表示縮尺において、中立角度位置の傾斜駆動に必要とされる傾斜駆動パラメータの演算が完了しているか否かを判定する。演算が完了している場合にはS5に進み、演算されていない場合にはS4に進み、該傾斜駆動パラメータを演算処理する。傾斜駆動パラメータは、上記したように、表示縮尺に応じて予め定められた単位距離毎に経路に沿って分割するポイント設定を行ない、それらポイント間の方向ベクトルを定めて、それら方向ベクトルとは逆方向に定められる傾斜方向と、それら方向ベクトルの水平方向に対する傾斜角度とを演算する。これらの演算が終了するとS5に進む。
【0071】
S5では、得られた各ポイント間(勾配算出区間)の傾斜駆動パラメータ(傾斜方向と傾斜角度)に基づいて、トラックボール部21の中立角度位置が新たな中立角度位置に設定されるよう、モータ31,32の駆動を開始する。これらの駆動は、予め定められた駆動継続時間又は駆動継続距離が到来するまで継続される。ただし、駆動継続中に駆動制御中止の要求が、例えばナビゲーション装置200の操作スイッチの操作等により与えられた場合には、S1に戻る。こうした中止要求がない場合には、駆動継続時間又は駆動継続距離が到来するまで現在の傾斜駆動パラメータに基づいてモータ31,32の駆動制御が継続される。駆動継続時間又は駆動継続距離が到来するとS7に進む。
【0072】
S7では、中立角度位置駆動制御が終了か否かを判定する。具体的には、次区間の有無を判定して、次区間が存在する場合にはS9に進み、存在しない場合には本プログラム102bを終了する。
【0073】
これにより、オンルートスクロール時にポインタが示す経路上の地点の勾配に応じてトラックボール部21の中立角度位置が刻々と変化し、これに伴い該トラックボール部21が駆動するから、トラックボール部21に触れているだけで、経路の勾配を認識することが可能となる。
【0074】
なお、このトラックボール部21の中立角度位置を変更する際に、走行案内経路の進行方向に対応する領域450を、図6の(a)に示すようにLED39により点灯してもよい。このとき、LED39の輝度を傾斜角度θrの値に対応して変化させてもよい。例えば、この傾斜角度θrが大きいほどLED39の輝度を大とすることで、勾配の大小の認識をトラックボール部32の視認でも行なうことが可能となる。勾配の大小を表示するだけであれば、LED39の点灯領域は進行方向領域450だけでなく、例えば、トラックボール部21の全面であってもよい。
【0075】
次に、トラックボール部21を操作するときに付与される操作反力を設定する操作反力発生プログラムについて説明する。トラックボール部21の操作反力(操作力)は、非操作状態においては発生しておらず、トラックボール部21を中立角度位置から傾斜させる操作を行なうことで発生する。本実施形態においては、トラックボール部21の中立角度位置(中立点)からの操作ストローク量(相対変位量)に応じて操作反力は変化する。具体的には、図8に示すように、中立角度位置からの操作ストローク量が大となるほど操作反力が大となるよう設定されている。これにより、経路上の各地点毎の勾配を操作反力として認識することが可能となる。
【0076】
例えば、オンルートスクロール時に、トラックボール部21を変位不動となるよう操作者が手で押さえつけた状態として、トラックボール部21の中立角度位置が、図9に示すように、N0からN1へ、さらにN1からN2へと順次変化する場合を考える。この場合、図9の(b)に示すように、中立角度位置がN0からN1に変化する区間x1では、中立角度位置の傾斜角度がθ1となるよう駆動しており、中立角度位置がN1からN2に変化する区間x2では、中立角度位置の傾斜角度がθ2となるよう駆動している。そして、トラックボール部21は変位不動に押さえつけられているため、区間x1、x2のいずれにおいても、中立角度位置は対応する傾斜角度θ1,θ2に変化するものの、トラックボール部21そのものは不動であり、トラックボール部21の操作軸線20は、押さえつけた時点での中立角度位置N0に常に固定された状態となっている。即ち、操作軸線20は固定されるが中立角度位置が変化するため、相対的な操作ストローク量の変化が生じる。
【0077】
そして、本実施形態においては、図8に示すように、操作ストローク量が大となるほど操作反力も大となるので、トラックボール部21が手で押さえつけられた状態にあると、操作者は操作反力の変化から地図上の勾配を体感することが可能となっている。なお、手を離した場合には、トラックボール部21の操作軸線20は、現在定められている中立角度位置に移動し、操作反力は失われる(操作者がトラックボール操作軸線20を中立角度位置に意図して移動させた場合も同様である)。そして、もう一度トラックボール部21を手で押さえつけた状態とすることで、この押さえつけたときの中立角度位置を基準に再びトラックボール操作軸線20が固定され、その後、押さえつけた状態における操作軸線20の傾斜角度位置を基準とし、中立角度位置の変化に伴って相対的に操作ストローク量が変化し、操作者の手にはそのストローク量に応じた操作反力が伝達される。
【0078】
こうした反力発生は、マニュアル指示モードや指示方向スクロールモード、オンルートスクロールモードのいずれにおいても同様にして行われるものである。具体的には、操作反力発生プログラム102bの実行により、ポインタが経路上の異なる勾配算出区間に移動するときに、そのときのトラックボール部21の操作軸線20と次の勾配算出区間におけるトラックボール部21の中立角度位置との角度差(相対変位量)を算出し、図8に示す角度差と操作反力との対応関係に基づいて、次区間の操作反力を算出して、モータ31,32を駆動制御する。以下では、図10を用いて、オンルートスクロール時における操作反力発生制御の流れを説明する。
【0079】
図10の操作反力決定処理では、S21及びS22において、経路上の最初の勾配算出区間における操作反力を算出し、これを記憶する。具体的には、地図上における勾配のない水平な地点に対応する中立角度位置を初期中立角度位置として、これをオンルートスクロール時におけるトラックボール部21の初期中立角度位置として定める。この初期中立角度位置と走行案内経路上の最初の勾配算出区間の中立角度位置との角度差を算出し、最初の勾配算出区間の操作反力を算出する。そして、算出された角度差と操作反力とを対応付けた形でRAM103に記憶する。
【0080】
次いで、S23において、走行案内経路上に次の勾配算出区間があるか否かを判定する。ある場合にはS24及びS25に進み、次の勾配算出区間のる操作反力を算出する。具体的には、前回の中立角度位置と次の中立角度位置との角度差を算出し、この勾配算出区間の操作反力を算出する。そして、算出された角度差と操作反力とを対応付けた形でRAM103に記憶し、S23に戻る。このようにして走行案内経路上の全勾配算出区間に対し、角度差と操作反力を対応付けてRAM103に記憶し、全勾配算出区間終了すると本プログラムも終了する。
【0081】
そして、操作反力発生プログラム102bは、ポインタが各勾配算出区間に到来する毎にRAM103に記憶された角度差と操作反力とを読み出し、読み出した角度差に基づいてトラックボール部21の中立角度位置を変更する傾斜駆動を実行し、読み出した操作反力を操作者の操作に応じて発声させる。これを順次繰り返すことで、操作者にトラックボール部21の傾斜駆動と操作反力との大きさとの双方で、走行案内経路上の勾配を認識させることができる。
【0082】
以上、本発明の一実施形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて種々の変更が可能である。
【0083】
例えば、勾配値算出プログラム205cは、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なうものとされ、勾配スムージング手段として機能するように構成してもよい。これにより、操作反力が滑らかに変化するようになるから、操作者に違和感なく道路勾配を認識させることができる。
【0084】
また、中立角度位置変更プログラム102aは、表示装置400の画面上にてポインタが指示する地点の地図上での種別に応じて、勾配値に応じたモータ31,32の駆動制御を互いに異なるパターンにて実施するものとすることができる。
【0085】
また、図11に示すように、操作反力発生プログラム102bを、ポインタ410が地図上の道路500の外(道路外領域600)に定められた経路460上にある場合の操作反力が、同じく道路500上に定められた経路450上にある場合の操作反力よりも大きく設定されるようモータ31,32を制御するように機能させることができる。例えば、ポインタが指示する地点が道路領域500上であるか否かを判定し、道路領域500上である場合には上記実施形態と同様の反力で、道路外領域600である場合にはそれよりも一定値減じられた反力が出力されるようにすることができる。これにより、特に、マニュアル指示モードにおいて、道路に沿った勾配の認識が容易となる。
【0086】
また、トラックボール部の操作反力を、中立角度位置近辺の予め定められた傾斜角度範囲内において減じられるようにし、遊びを設けることもできる。これにより、トラックボール部21の操作誤差によるわずかな操作軸線20のずれが操作反力制御に反映されないようにでき、操作者に対し操作誤差が除外された適切な操作反力を伝達可能となる。
【0087】
また、中立角度位置変更プログラム102aにおいて、ポインタが通過した地点に対応する勾配値をトラックボール部21の駆動状態に反映させる応答遅れ時間を、ポインタが地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定することもできる。
【図面の簡単な説明】
【0088】
【図1】本発明の入力システムの電気的構成を示す第一のブロック図。
【図2】車載用操作装置の一部であるハプティックデバイスの外観の概略を示す図。
【図3】入力システムの設置例を示す図。
【図4】本発明の入力システムの電気的構成を示す第二のブロック図。
【図5】トラックボールの中立角度位置の変更方法を説明する図。
【図6】トラックボールの中立角度位置の変化状態を説明する図。
【図7】オンルートスクロール時における中立角度位置傾斜駆動処理を示すフローチャート。
【図8】中立角度位置に対するトラックボール操作軸線の相対変位量と操作反力との関係を示すグラフ。
【図9】操作者への操作反力の伝達を説明する図。
【図10】オンルートスクロール時における操作反力決定処理を示すフローチャート。
【図11】道路上と道路外において操作反力を異とする実施形態を説明する図。
【符号の説明】
【0089】
1 入力システム
2 ハプティックデバイス(触覚提示装置)
10 コントローラ
20 操作軸線(トラックボール操作軸線)
21 トラックボール部(操作部)
21a 操作面
28 筐体
29 突起部
31,32 アクチュエータ(モータ:操作反力発生手段、操作部駆動手段)
100 ECU(操作部傾斜駆動制御手段、)
200 ナビゲーション装置(地図表示手段、走行案内経路設定手段、勾配反映情報取得手段、勾配算出手段、ポインタ移動表示手段(地図スクロール手段)、基準位置設定手段、ポインタ移動手段、勾配スムージング手段)
205 記憶装置(地図情報記憶部、勾配反映情報記憶部)
400 表示装置(地図表示装置)
【特許請求の範囲】
【請求項1】
車両に搭載される地図表示装置の位置入力システムであって、
前記地図表示装置に地図を表示するための地図情報を記憶する地図情報記憶部と、
該地図情報に基づいて前記地図表示装置に地図を表示する地図表示手段と、
前記地図表示装置の画面上に表示される前記地図上でポインタによる位置指示を行なうための操作部を備え、該操作部は、非操作時において自身の操作軸線が中立角度位置に保持されるとともに、操作時においては前記地図上で位置指示すべき方向に対応する方向に前記操作軸線が前記中立角度位置から傾斜するよう、前記中立角度位置への復帰力に抗して操作されるポインティングデバイスと、
前記操作軸線に自発的な角度変化が生ずるように前記操作部を駆動する操作部駆動手段と、
前記操作部の操作に応じて、前記ポインタを前記地図上の対応する向きに相対移動させるポインタ移動表示手段と、
前記地図上の地点毎に、当該地点の前記ポインタの移動方向における勾配を反映した勾配反映情報を記憶する勾配反映情報記憶部と、
前記ポインタを前記地図上の予め定められた経路に沿って相対移動させるに伴い、該ポインタが前記経路上にて順次通過する各地点の前記勾配反映情報を取得する勾配反映情報取得手段と、
取得される該勾配反映情報に基づいて、前記経路上の勾配値変化を反映した形で前記操作軸線の傾斜角度位置が変化するように前記操作部駆動手段を駆動制御する操作部傾斜駆動制御手段と、
を備えたことを特徴とする入力システム。
【請求項2】
取得される前記勾配反映情報に基づいて、前記操作軸線の前記中立角度位置を、前記ポインタが示す前記経路上の各地点の勾配値に対応した値となるように変更しつつ定める中立角度位置変更手段が設けられ、
前記操作部傾斜駆動制御手段は、前記操作部の中立角度位置が、前記中立角度位置変更手段による決定結果に従い変化するように前記操作部駆動手段を駆動制御するものである請求項1記載の入力システム。
【請求項3】
前記地図表示装置の画面上の固定位置に前記ポインタの基準位置を定める基準位置設定手段を備え、
前記ポインタ移動表示手段は、前記ポインタの指示位置が前記地図上にて前記基準位置から相対移動するに伴い、前記地図を前記画面上にて該相対移動に対応した向きにスクロールする地図スクロール手段を備える請求項2記載の入力システム。
【請求項4】
前記勾配反映情報は前記各地点の標高情報であり、
前記操作部傾斜駆動制御手段は、前記ポインタの移動方向に順次定められる勾配算出区間の各両端の標高差分に基づいて、個々の勾配算出区間の勾配値を算出する勾配算出手段を備え、算出された該勾配値に基づいて前記操作部駆動手段を駆動制御する請求項2又は請求項3記載の入力システム。
【請求項5】
前記勾配算出手段は、前記勾配算出区間を前記経路に沿って一定の区間長を有するものとして定める請求項4記載の入力システム。
【請求項6】
前記ポインタを前記経路に沿って予め定められた速度で相対移動させるポインタ移動手段を備え、前記勾配算出手段は、前記ポインタが通過する各地点の標高値を一定時間毎にサンプリングする標高値サンプリング手段を備え、隣接する標高値サンプリング値とサンプリング時間間隔とに基づいて前記勾配値を算出するものである請求項5記載の入力システム。
【請求項7】
前記勾配算出手段は、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なう勾配スムージング手段を有する請求項4ないし請求項6のいずれか1項に記載の入力システム。
【請求項8】
前記操作部傾斜駆動制御手段は、前記地図表示装置に表示される前記地図の表示尺度が予め定められた表示尺度よりも大きい場合にのみ前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項7のいずれか1項に記載の入力システム。
【請求項9】
前記操作部傾斜駆動制御手段は前記ポインタの前記地図上での移動方向に応じて前記操作部の駆動傾斜方向を変化させるよう前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項8のいずれか1項に記載の入力システム。
【請求項10】
前記操作部傾斜駆動制御手段は、前記ポインタが指示する地点の前記地図上での種別に応じて、前記勾配値に応じた前記操作部駆動手段の駆動制御を互いに異なるパターンにて実施するものである請求項1ないし請求項9のいずれか1項に記載の入力システム。
【請求項11】
前記操作部に外部から操作力が加えられた場合に、該操作部に予め定められた操作反力を生じさせる操作反力発生手段と、
前記ポインタが前記地図上の道路外に定められた経路上にある場合の操作反力が、同じく道路上に定められた経路上にある場合の操作反力よりも大きく設定されるよう前記操作反力発生手段を制御する操作反力制御手段とを有する請求項1ないし請求項10のいずれか1項に記載の入力システム。
【請求項12】
前記経路が前記地図上の道路に沿って定められ、前記操作部傾斜駆動制御手段は、該道路に沿った勾配変化に基づいて前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項11のいずれか1項に記載の入力システム。
【請求項13】
前記地図上の道路に沿って走行案内経路を設定する走行案内経路設定手段と、
前記操作部の操作状態とは無関係に前記ポインタを、前記走行案内経路をトレースする形で自動移動させるポインタ自動移動手段とを備え、
前記操作部傾斜駆動制御手段は、該走行案内経路上を移動するポインタ位置の変化に対応させた形で前記操作部駆動手段を駆動制御するものである請求項12記載の入力システム。
【請求項14】
前記操作部傾斜駆動制御手段は、前記ポインタが通過した地点に対応する勾配値を前記操作部の駆動状態に反映させる応答遅れ時間を、前記ポインタが前記地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定する請求項1ないし請求項13のいずれか1項に記載の入力システム。
【請求項1】
車両に搭載される地図表示装置の位置入力システムであって、
前記地図表示装置に地図を表示するための地図情報を記憶する地図情報記憶部と、
該地図情報に基づいて前記地図表示装置に地図を表示する地図表示手段と、
前記地図表示装置の画面上に表示される前記地図上でポインタによる位置指示を行なうための操作部を備え、該操作部は、非操作時において自身の操作軸線が中立角度位置に保持されるとともに、操作時においては前記地図上で位置指示すべき方向に対応する方向に前記操作軸線が前記中立角度位置から傾斜するよう、前記中立角度位置への復帰力に抗して操作されるポインティングデバイスと、
前記操作軸線に自発的な角度変化が生ずるように前記操作部を駆動する操作部駆動手段と、
前記操作部の操作に応じて、前記ポインタを前記地図上の対応する向きに相対移動させるポインタ移動表示手段と、
前記地図上の地点毎に、当該地点の前記ポインタの移動方向における勾配を反映した勾配反映情報を記憶する勾配反映情報記憶部と、
前記ポインタを前記地図上の予め定められた経路に沿って相対移動させるに伴い、該ポインタが前記経路上にて順次通過する各地点の前記勾配反映情報を取得する勾配反映情報取得手段と、
取得される該勾配反映情報に基づいて、前記経路上の勾配値変化を反映した形で前記操作軸線の傾斜角度位置が変化するように前記操作部駆動手段を駆動制御する操作部傾斜駆動制御手段と、
を備えたことを特徴とする入力システム。
【請求項2】
取得される前記勾配反映情報に基づいて、前記操作軸線の前記中立角度位置を、前記ポインタが示す前記経路上の各地点の勾配値に対応した値となるように変更しつつ定める中立角度位置変更手段が設けられ、
前記操作部傾斜駆動制御手段は、前記操作部の中立角度位置が、前記中立角度位置変更手段による決定結果に従い変化するように前記操作部駆動手段を駆動制御するものである請求項1記載の入力システム。
【請求項3】
前記地図表示装置の画面上の固定位置に前記ポインタの基準位置を定める基準位置設定手段を備え、
前記ポインタ移動表示手段は、前記ポインタの指示位置が前記地図上にて前記基準位置から相対移動するに伴い、前記地図を前記画面上にて該相対移動に対応した向きにスクロールする地図スクロール手段を備える請求項2記載の入力システム。
【請求項4】
前記勾配反映情報は前記各地点の標高情報であり、
前記操作部傾斜駆動制御手段は、前記ポインタの移動方向に順次定められる勾配算出区間の各両端の標高差分に基づいて、個々の勾配算出区間の勾配値を算出する勾配算出手段を備え、算出された該勾配値に基づいて前記操作部駆動手段を駆動制御する請求項2又は請求項3記載の入力システム。
【請求項5】
前記勾配算出手段は、前記勾配算出区間を前記経路に沿って一定の区間長を有するものとして定める請求項4記載の入力システム。
【請求項6】
前記ポインタを前記経路に沿って予め定められた速度で相対移動させるポインタ移動手段を備え、前記勾配算出手段は、前記ポインタが通過する各地点の標高値を一定時間毎にサンプリングする標高値サンプリング手段を備え、隣接する標高値サンプリング値とサンプリング時間間隔とに基づいて前記勾配値を算出するものである請求項5記載の入力システム。
【請求項7】
前記勾配算出手段は、互いに隣接する勾配算出区間について算出された勾配値の差が予め定められた値以上となった場合に、両区間の勾配値差が縮小するようにスムージングを行なう勾配スムージング手段を有する請求項4ないし請求項6のいずれか1項に記載の入力システム。
【請求項8】
前記操作部傾斜駆動制御手段は、前記地図表示装置に表示される前記地図の表示尺度が予め定められた表示尺度よりも大きい場合にのみ前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項7のいずれか1項に記載の入力システム。
【請求項9】
前記操作部傾斜駆動制御手段は前記ポインタの前記地図上での移動方向に応じて前記操作部の駆動傾斜方向を変化させるよう前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項8のいずれか1項に記載の入力システム。
【請求項10】
前記操作部傾斜駆動制御手段は、前記ポインタが指示する地点の前記地図上での種別に応じて、前記勾配値に応じた前記操作部駆動手段の駆動制御を互いに異なるパターンにて実施するものである請求項1ないし請求項9のいずれか1項に記載の入力システム。
【請求項11】
前記操作部に外部から操作力が加えられた場合に、該操作部に予め定められた操作反力を生じさせる操作反力発生手段と、
前記ポインタが前記地図上の道路外に定められた経路上にある場合の操作反力が、同じく道路上に定められた経路上にある場合の操作反力よりも大きく設定されるよう前記操作反力発生手段を制御する操作反力制御手段とを有する請求項1ないし請求項10のいずれか1項に記載の入力システム。
【請求項12】
前記経路が前記地図上の道路に沿って定められ、前記操作部傾斜駆動制御手段は、該道路に沿った勾配変化に基づいて前記操作部駆動手段の駆動制御を行なう請求項1ないし請求項11のいずれか1項に記載の入力システム。
【請求項13】
前記地図上の道路に沿って走行案内経路を設定する走行案内経路設定手段と、
前記操作部の操作状態とは無関係に前記ポインタを、前記走行案内経路をトレースする形で自動移動させるポインタ自動移動手段とを備え、
前記操作部傾斜駆動制御手段は、該走行案内経路上を移動するポインタ位置の変化に対応させた形で前記操作部駆動手段を駆動制御するものである請求項12記載の入力システム。
【請求項14】
前記操作部傾斜駆動制御手段は、前記ポインタが通過した地点に対応する勾配値を前記操作部の駆動状態に反映させる応答遅れ時間を、前記ポインタが前記地図上の道路外に定められた経路上にある場合に、同じく道路上に定められた経路上にある場合よりも大きく設定する請求項1ないし請求項13のいずれか1項に記載の入力システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2007−304996(P2007−304996A)
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2006−134467(P2006−134467)
【出願日】平成18年5月12日(2006.5.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成18年5月12日(2006.5.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]