
入力デバイス
【課題】光源と二分岐状の発光側光導波路コアとの間の調芯に水平方向のずれが生じた場合でも、光源の光をこの光源に隣接する枠の2辺に所定の比率で正確に分配することのできる入力デバイスを提供する。
【解決手段】入力デバイスの矩形状の検知空間Sの周りに配置された枠状の光導波路10における発光側の二分岐状光導波路コアC1は、角部10zに設けられた光源20に接する光入射側の共通部1と、この共通部の終端側の分岐点から分岐して上記枠の2辺に配置された2つの分岐コア部4,5とを備え、上記共通部1の光入射端面(光結合面)1aのコア幅Wが1mm以上の場合は、光入射端面1aから分岐点Jまでの距離Lが3mm以上に設定され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になるように設定される。
【解決手段】入力デバイスの矩形状の検知空間Sの周りに配置された枠状の光導波路10における発光側の二分岐状光導波路コアC1は、角部10zに設けられた光源20に接する光入射側の共通部1と、この共通部の終端側の分岐点から分岐して上記枠の2辺に配置された2つの分岐コア部4,5とを備え、上記共通部1の光入射端面(光結合面)1aのコア幅Wが1mm以上の場合は、光入射端面1aから分岐点Jまでの距離Lが3mm以上に設定され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になるように設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、枠状の光導波路内側の検知空間に、物体検出用の光の格子を形成するとともに、この格子状の光の部分的な遮蔽を検知することにより、この検知空間内における指やペン等の入力体の位置を検出する入力デバイスに関するものである。
【背景技術】
【0002】
コンピュータや各種機器に、指示や座標情報等を入力する入力インターフェースとして、枠状の検知空間内に形成した格子状の光の遮蔽を検出することにより、この検出空間内における指やペン等の入力体の位置を検出する、光学式の入力デバイスが使用されている。
【0003】
この光学式入力デバイスに用いられる光学的検出手段としては、従来、四角枠状のフレームにおいて、互いに対向する一方の辺に複数の発光素子が並設され、他方の辺に複数の受光素子が並んで配置され、上記発光素子から受光素子に向かって出射された光が、上記フレーム内に、縦横に交差する光の格子を形成し、指等による光の遮蔽を検出して、この指等(入力体)の位置を検出するようになっているものが知られている(例えば、特許文献1等を参照。)。
【0004】
しかしながら、上記のような多数の光学素子を使用する従来の光学的検出手段は、発光素子と受光素子との間の位置合わせ(アライメント)等の調整や製造の手間が多く、また部品点数も多いため品質がばらつき、歩留りが向上しない、といった数多くの問題があった。
【0005】
これに対して、本出願人は、特願2010−139063において、一辺に光出射用の発光側コアを有し、対応する他辺に光入射用の受光側コアを有する枠状の光導波路を用い、上記枠において隣接する2つの辺に挟まれた1つの角部の外縁に光源を配設するとともに、この光源の光を、上記隣接する2辺(互いに直交する2つの辺)に分配して、格子状の光の縦方向光および横方向光の両方の形成に利用することにより、アライメント調整等の手間が少なく、軽量、薄形で、かつ、デバイス全体で必要な光を1つの光源で賄うことのできる光学式入力デバイスを提案している。
【0006】
上記出願人の提案(特願2010−139063)にかかる入力デバイス(光導波路デバイス)は、図4(a)に示すように、フラットパネルディスプレイの周囲の額縁部等に配置されるものであり、この額縁部に、発光側の光導波路コア11および受光側の光導波路コア12を備える枠状光導波路と、光源20および受光素子(受光素子アレイ30)とが配設されている。なお、ここでは説明しないが、図中の符号14a,15aは後記の分岐コア部の「連絡路」に、符号14b,15bは後記の分岐コア部の「主路」に、符号14c,15cは後記の分岐コア部の「光出射絡路」に相当する部位である。
【0007】
上記発光側の光導波路コア11は、光源20に接して設けられた広幅状の共通部13と、この共通部13から分岐して枠の一辺方向(この例では長辺方向)に直線状に延びる第1の分岐コア部14と、共通部13の分岐点Jから90°湾曲して枠の他辺(短辺)方向に延びる第2の分岐コア部15とからなる、二分岐状のコアに形成されており、上記共通部13の光入射側端面(光結合面)13aからコアに入射した光源20の発光が、分岐点Jにおける上記第1の分岐コア部14と第2の分岐コア部15のコア幅の比(W1:W2)に応じた所定の比率に分配されるようになっている〔図4(b)参照〕。
【0008】
また、これら第1の分岐コア部14および第2の分岐コア部15の各光出射側端部(出光部14xおよび15y)から、上記光源20の光が額縁内の検知空間(領域)Sに出射(投射)されることにより、この検知空間S内に、縦横(xy方向)に交差する光の格子が形成される。そして、指やペン等による上記光の格子の遮蔽を、上記受光側光導波路コア12に繋がる受光素子アレイ30で感知し、感知した受光素子に対応する検知領域上の位置を特定することにより、上記指等が触れた部分の位置情報(座標等)を出力することができる。
【0009】
そして、上記光学式入力デバイスは、先に述べたように、分岐点Jから90°湾曲して枠の他辺方向に延びる第2の分岐コア部15のコア幅(W2)が、光を直線状に導通する第1の分岐コア部14のコア幅(W1)より広くなっていることにより、各辺に分配される光量を均等化することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特許第3682109号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、本発明者の研究によれば、上記のような枠状の光導波路を用いるとともに、その二分岐状の発光側光導波路コアを用いて、光源からの光を枠の2辺に分配する入力デバイスにおいては、上記二分岐状光導波路コアの分岐点における「一方の辺に向かうコアの幅と他方の辺に向かうコアの幅との比」(分配比)以外にも、上記枠の2辺に分配される光量の比を左右する要素があることが分かってきた。
【0012】
すなわち、図4(b)に示すように、通常、上記光源20は、その光軸(図中の点O)が上記発光側光導波路コア11の共通部13における光入射端面(光結合面)13aの幅方向中心軸(一点鎖線)と一致するように調芯(アライメント)して位置決めされている。しかしながら、デバイス設計の都合や、製造上全品を精密に調芯することが困難であること等により、共通部13の光入射端面13aからコアの分岐点Jまでの距離Lを充分に確保できない条件下(3mm以下)においては、組み立て等の際に、上記光源の光軸Oが光導波路の水平方向(例えば、図中の矢印A方向または矢印B方向)にずれた場合、コアの分岐点Jで一方の辺側(この場合は第1の分岐コア部14)に分配される光量と他方の辺側(この場合は第2の分岐コア部15)に分配される光量の比が、所要の設計値と異なってしまうおそれがあることを突き止めた。
【0013】
さらに、上記のように枠の一方の辺側と他方の辺側に分配される光量の比が所要の設計値と異なる場合、枠の内縁に位置する、発光側光導波路コア11の各光出射側端部〔出光部14xおよび15y:図4(a)参照〕から出射されるそれぞれの光の量(強度)が、枠の辺の長手方向にばらついて均一性(ユニフォーミティ)が低下し、上記検知領域における格子状の光の遮蔽の検出感度(すなわち「入力体の位置の検出精度」)が低くなる領域が生じる可能性があることを突き止めた。ここに改善の余地がある。
【0014】
本発明は、このような事情に鑑みなされたもので、光源と二分岐状の発光側光導波路コアとの間の調芯に水平方向のずれが生じた場合でも、光源の光をこの光源に隣接する枠の2辺に所定の比率で正確に分配することのできる入力デバイスの提供をその目的とする。
【課題を解決するための手段】
【0015】
上記の目的を達成するため、本発明の入力デバイスは、枠に囲われた空間が検知空間になっている四角枠状の光導波路と、この枠状光導波路の1つの角部の外縁に配設される光源と、複数の受光素子を備える受光手段と、上記光源から出射される光を互いに隣接する上記枠の2辺に所定の比率で分配する二分岐状の発光側光導波路コアと、上記枠の他の2辺にそれぞれ配置されて上記検知空間を通った光を受光手段に導く複数の受光側光導波路コアとを備え、上記二分岐状の発光側光導波路コアが、上記角部に配置された光入射側の共通部と、この共通部の終端側の分岐点から二股状に分岐して上記枠の2辺に配置された分岐コア部とを有し、この発光側光導波路コアの光出射側端部から対応する上記受光側光導波路コアの光入射側端部に到達する光が入力体で遮蔽されたことを検知することにより、上記検知空間内に位置する上記入力体の位置情報を取得する入力デバイスであって、上記発光側光導波路コアが、下記の(A)または(B)のいずれかの形状に形成されているという構成をとる。
(A)上記共通部の始端側の光入射端面のコア幅(W)が1mm以上に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上になっている形状。
(B)上記共通部の始端側の光入射端面のコア幅(W)が1mm未満に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が、上記光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕になっている形状。
【0016】
すなわち、本発明の発明者は、前記課題を解決するために、枠状の光導波路の光路に関する研究を重ね、枠の角部に配置された光源の光を隣接する枠の2辺方向に分配する二分岐状の発光側光導波路コアを備える入力デバイスにおいて、光源からの光を受け入れる幅広状の共通部の形状に着目した。そして、上記共通部の形状について実験を重ね、その結果、この幅広状の共通部における上記光入射側端面からコアの分岐点までの距離(L)を、上記光源と光導波路コアの調芯ずれに起因する分配光量の偏りを解消できるのに充分な長さとすることにより、上記枠の2辺方向に分配される光量の比が安定することを見出し、本発明に到達した。
【0017】
なお、本発明におけるコアの「幅」とは、枠状光導波路の辺に沿って延びるコアの長手方向と直交する方向の長さのことをいう。この長さは、枠の辺の面(水平面)上にあらわれる。また、「端面と分岐点との距離」等における「距離」もこれと同様、上記枠の水平面上における長さをいい、コアの「厚さ」とは、上記枠の水平面に垂直な上下方向の長さをいう。
【発明の効果】
【0018】
以上のように、本発明の入力デバイスは、発光側の二分岐状の光導波路コアの共通部が、光源に接する角部に配置され、この共通部の終端側の分岐点で分岐した2つの分岐コア部が、上記角部に隣接する2辺にそれぞれ配置されているとともに、上記共通部の始端側の光入射端面のコア幅(W)が1mm以上の場合は、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上に形成され、上記光入射端面のコア幅(W)が1mm未満の場合は、上記光入射端面から上記分岐点までの距離(L)が、この光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕に形成されている。そのため、この入力デバイスは、光導波路製造時の製造誤差や光源取付時の製作公差等に起因する、光源と発光側光導波路コアとの間の相対的な光軸のずれ(調芯ずれ)が生じた場合でも、この共通部から2辺方向に分岐した各分岐コア部に分配される光量の比が、所要の設計値から変動することを抑えることができる。
【0019】
また、上記分岐後の各分岐コア部が、枠の各辺の長手方向に沿って配置された幅広状の主路と、上記辺の長手方向に沿った所定のピッチごとに上記主路から分岐する複数の光出射路とを備え、上記各光出射路の光出射側端部が、上記枠の2辺の内縁に位置決めされているものは、上記のように共通部から各分岐コア部に分配される光量が安定するため、これら各分岐コア部の光出射側端部(出光部)から検知空間に向かって出射されるそれぞれの光の量(強度)も、枠の辺の長手方向に均一化する。これにより、本発明の入力デバイスは、枠(検知空間)の長手方向全域にわたって検出感度の揃った、死角のない高精度な入力体の位置検出を行うことができる。
【0020】
さらに、本発明の入力デバイスのなかでも、上記各分岐コア部の主路が、上記分岐側の始端から終端側に向かって徐々にコア幅が狭くなる略三角形状になっているものは、上記分岐コア部の各光出射側端部から出射される光量を、枠の辺の長手方向により均一なものとすることができる。
【図面の簡単な説明】
【0021】
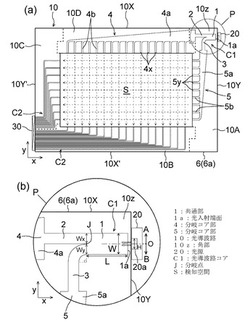
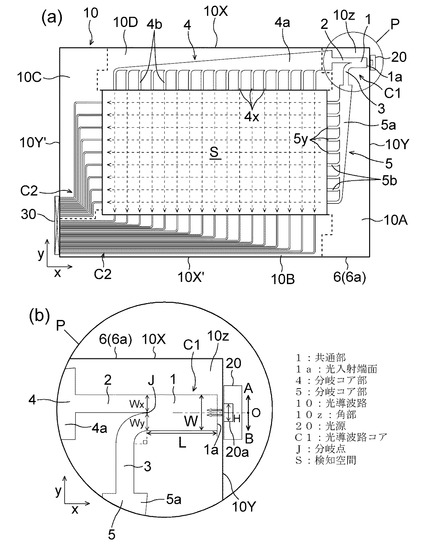
【図1】(a)は本発明の入力デバイスの構成を示す平面図であり、(b)はそのP部拡大図である。
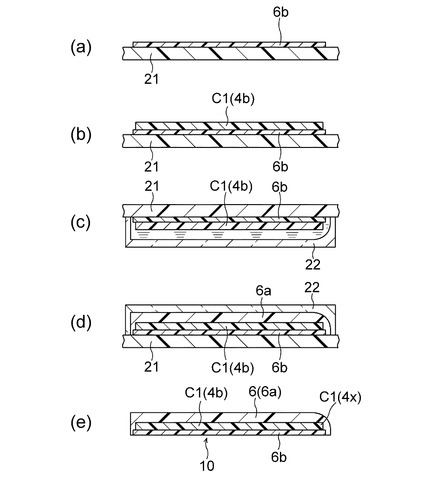
【図2】(a)〜(e)は、本発明の入力デバイスに用いられる枠状光導波路を作製する方法を説明する図である。
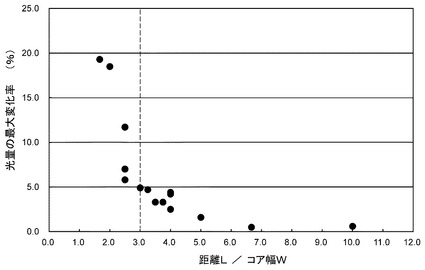
【図3】本発明の実施例における検証の結果を示す散布図である。
【図4】(a)は従来の入力デバイスの構成を示す平面図であり、(b)はそのQ部拡大図である。
【発明を実施するための形態】
【0022】
つぎに、本発明の実施の形態を、図面にもとづいて詳しく説明する。
【0023】
図1(a)に全体像を示す入力デバイスは、例えば、フラットパネルディスプレイ等の表示装置の画面の周囲に配置され、その枠状の光導波路10の中央部の空間(検知空間S)から露呈する上記画面の領域に、指やペン等の入力体で触れることにより、この入力体の位置を、上記検知空間S内の座標(x−y座標)として取得し、その位置情報をコンピュータやATM等の情報機器に出力するものである。
【0024】
上記枠状の光導波路10は、上記ディスプレイの画面のサイズに合わせて、横長(長辺Xの長さ:短辺Yの長さ=16:9)の長方形状に形成されたクラッド層6と、このクラッド層6に埋没するようにして形成された光路としてのコア(C1,C2)とからなり、その1つの角部10zの外縁に、光源20としての発光素子が、所定の向きに取り付けられている。なお、この枠状光導波路10は、別個に作製した4つの光導波路部材(ピース)10A,10B,10C,10Dを組み合わせて構成されている。
【0025】
また、上記枠状光導波路10には、上記クラッド層6の角部10zに隣接する枠の2辺(図においては長辺10Xと短辺10Y)に、上記光源20から出射される光を、互いに直交する上記2辺10X,10Y方向に所定の比で分配する発光側光導波路コアC1が設けられ、上記辺10X,10Yにそれぞれ対向する他の2辺(10X’,10Y’)に、上記発光側光導波路コアC1からの光を入射させて受光素子(受光素子アレイ30)に導くための複数の受光側光導波路コアC2が設けられている。
【0026】
さらに、上記発光側光導波路コアC1は、枠状光導波路10の角部10zに配置された光入射側の共通部1と、上記共通部1の分岐点Jで分配された光を枠の一辺(10X)方向および枠の他辺(10Y)方向に伝達する第1連絡路2および第2連絡路3と、広幅の主路4a,5aとこの主路4a,5aから分岐して検知空間Sに光を投射するための複数の分岐状光出射路4b,5bとを備える第1分岐コア部4および第2分岐コア部5とから形成されている。そして、上記二分岐状の発光側光導波路コアC1は、図1(b)のように、その共通部1の形状が、その始端側の光入射端面(光結合面)1aのコア幅Wが1mm以上の場合は、この共通部1における上記光入射端面1aから分岐点Jまでの距離Lが3mm以上に設定され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になるように設定されている。これが、本発明の入力デバイスの特徴である。
【0027】
上記入力デバイスについて、さらに詳しく説明すると、この入力デバイスに用いられる枠状光導波路10は、例えば、ポリマー系光導波路の場合、樹脂材料を用いて形成された枠状のクラッド層6(オーバークラッド層6aおよびアンダークラッド層6bからなる)の間に、フォトリソグラフィ法等により上記形状にパターニングされた発光側光導波路コアC1および上記複数の受光側光導波路コアC2が形成されている。
【0028】
上記発光側の光導波路コアC1は、上記光源20から出射される光を、互いに直交する上記2辺10X,10Y方向に所定の比で分配できるように、光源20に接する光入射側の端部(共通部1)から、枠のx方向(長辺10X側)の第1連絡路2とy方向(短辺10Y側)の第2連絡路3の2方向に分岐する、二分岐形状に形成されており、これら第1連絡路2および第2連絡路3の終端側(光出射側)にそれぞれ、上記枠の長辺10Xおよび短辺10Yに沿った形状の第1分岐コア部4および第2分岐コア部5が形成されている。
【0029】
上記発光側光導波路コアC1の共通部1は、図1(b)のように、第1連絡路2(コア幅:Wx)と第2連絡路3(コア幅:Wy)とを合わせたコア幅Wに相当する形状(この例においてはWx:Wy=1:1)に形成され、その一端側(図示右側)の光入射端面1aは、光源20からの光(白抜き矢印)が入射する光結合面(水平方向の幅W)となっている。なお、光入射端面1aの幅Wは、上記光源20との光結合を容易にするために、通常、光源20(発光素子20a)の発光部幅Hよりも広くなっている。例えば、発光素子20aの発光部幅Hが10μm程度である場合、上記光入射端面1aの幅は、40〜1000μmに設計される。また、上記光入射端面1aと発光素子20aの発光部との間の距離(隙間)は、通常300μm程度に設定される。そして、先に述べたように、上記共通部1における光入射端面(光結合面)1aのコア幅Wが1mm(1000μm)未満の場合、上記光入射端面1aから分岐点Jまでの距離Lは、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕に設定される。
【0030】
上記共通部1から分岐した一方の第1連絡路2は、分岐点Jにおける分岐後も上記光源20からの光を真っ直ぐに通過させることができるように、上記共通部1の一部を延長するように直線状に形成されており、一方の分岐コア部(第1分岐コア部4)に接続されている。なお、この例では、第1連絡路2の形状を、第1分岐コア部4まで同幅のストレート状としているが、この第1分岐コア部4に近づくにしたがって拡幅する三角状またはラッパ状としてもよい。
【0031】
上記分岐点Jで第1連絡路2と分岐した第2連絡路3は、図1(b)のように、この分岐点Jの直後から、1/4円形状(アーチ形状)に湾曲し、それより先端側が枠の短辺10Y側に直線状に延びる形状に形成されており、その終端が、他方の分岐コア部(第2分岐コア部5)に接続されている。なお、この第2連絡路3も、上記第1連絡路2と同様、第2分岐コア部5に近づくにしたがって拡幅する三角状またはラッパ状としてもよい。また、上記第2連絡路3は、この例においては上記第1連絡路2と同幅に形成されており、その幅Wy(および幅Wx)は、好ましくは20〜500μm、さらに好ましくは40〜300μmである。
【0032】
上記発光側光導波路コアC1における第1分岐コア部4は、上記第1連絡路2を通じて供給された光を、枠の一辺(長辺10X)に沿って分散させる細長の略三角形状の主路(第1主路)4aと、この主路4aから分岐する多数の光出射路4b,4b,・・・とからなる。これら光出射路4bは、辺10Xの長手方向に沿って所定のピッチごとに主路4aから次々と分岐する多分岐状に形成されており、その各先端(終端)側に設けられた光出射側端部(出光部4x)が、枠状光導波路10の検知空間S側内縁〔図1(a)においては上側縁〕の所定位置に、それぞれ位置決めされている。なお、上記例では、各出光部4xからの出光量を辺長手方向に揃えるために、上記主路4aの外縁側が、光入射側の始端部から終端側にかけて徐々に幅が狭くなる(所定角で傾斜する)形状に形成されているが、この上記主路4aは、全体のコア幅が長手方向に同じ(同幅)であってもよい。
【0033】
上記発光側光導波路コアC1における第2分岐コア部5も、上記第1分岐コア部4と同様、上記第2連絡路3を通じて供給された光を、枠の他辺(短辺10Y)に沿って分散させる細長の略三角形状の主路(第2主路)5aと、この主路5aから分岐する多数の光出射路5b,5b,・・・とからなり、これら各光出射路5bの先端(終端)側に設けられた光出射側端部(出光部5y)は、枠状光導波路10の検知空間S側内縁〔図1(a)においては右側縁〕の所定位置に、それぞれ位置決めされている。上記主路5aも、上記主路4aと同様、全体のコア幅が長手方向に同じ(同幅)であってもよい。
【0034】
そして、光源20からの光を上記各出光部4x,5yから出射(投射)させることにより、図1(a)のように、上記枠の内側の検知空間Sに、枠の縦横(xy方向)に交差する光の格子(点線、矢印は光の進行方向を示す)が形成される。なお、上記図1(a)における各光出射路4b,5b(および出光部4x,5y)は、図示が煩雑になるのを避けるため、その本数を減らして図示している(出射される光−点線矢印も同様)。上記光出射路4b,5bの本数(および出光部4x,5yの個数)は、入力デバイスのサイズや解像度等に応じて適宜設計されるが、例えば、上記第1分岐コア部4(長辺10X)側の光出射路4bの本数は200〜800本程度、上記第2分岐コア部5(短辺10Y)側の光出射路5bの本数は100〜600本程度のものが多用される。
【0035】
一方、上記発光側の光導波路コアC1に対して、検知空間Sを挟んで対向する辺(長辺10X’,短辺10Y’)には、上記各光出射路4b,5bの先端(出光部4x,5y)のそれぞれに対応する、受光側光導波路コアC2が複数形成されている。これら各受光側光導波路コアC2の光入射側の端部(受光部)は、上記発光側コアC1の各光出射側先端対向する枠の内縁〔図1(a)においては下側縁と左側縁〕の所定位置にそれぞれ位置決めされており、上記検知空間Sを通過して各受光側光導波路コアC2の先端(受光部)に入射した光が、これら各受光側光導波路コアC2の1本1本を通じて、受光素子アレイ30中で対応する個々の受光素子に導かれるようになっている。
【0036】
また、上記入力デバイスに用いられる光源20には、発光ダイオード(LED)または半導体レーザー等が用いられ、なかでも、光伝送性に優れるVCSEL(垂直共振器面発光レーザー)が好適に用いられる。上記光源20から出射される光の波長は、近赤外線(波長:700〜2500nm)が好ましい。
【0037】
さらに、この例では、図1(a)のように、上記光源20が枠状光導波路10の1つの角部10zの所定位置に配置され、その発光が、この角部10zに隣接する枠の2辺(10Xと10Y)に導かれるようになっている。そのため、このデバイス全体で必要な光を、1つの光源で賄うことができる。
【0038】
そして、上記入力デバイスに用いられる受光素子(アレイ30)としては、CCD,CMOS等のイメージセンサや、多数の受光素子が一列に並ぶCMOSリニアセンサアレイ等を用いることができる。
【0039】
上記構成の入力デバイスにおいては、先に述べたように、その共通部1の形状が、その始端側の光入射端面1aのコア幅Wが1mm以上の場合は、この共通部1における上記光入射端面1aから分岐点Jまでの距離Lが3mm以上に形成され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になる形状に形成されている。これにより、製作公差等による光源20と共通部1との間の相対的な位置ずれ(調芯ずれ)が生じた場合でも、この共通部1から上記分岐後の各分岐コア部4,5(2辺方向)に分配される光量の比が、所期の設計値から変動するのを抑えることができる。また、上記光源20と共通部1(光導波路コアC1)との間の調芯の許容範囲が広くなり、入力デバイスの組み立てを簡略化することができる。
【0040】
また、上記発光側光導波路コアC1の共通部1から分岐後の各分岐コア部4,5に分配される光量の比が安定することから、これら各分岐コア部4,5の光出射路4b,5b先端に設けられた光出射側端部から検知空間Sに向かって出射される格子状の光の均一性(ユニフォーミティ)も向上する。これにより、本発明の入力デバイスは、枠(検知空間S)の長手方向全域にわたって検出感度の揃った、死角のない高精度な入力体の位置の検出を行うことが可能になる。
【0041】
なお、上記共通部1の光入射端面1aのコア幅Wが1mm未満である場合において、上記光入射端面1aから分岐点Jまでの距離Lが、光入射端面1aのコア幅Wの3倍未満〔(L/W)<3〕になると、共通部1から各分岐コア部4,5に分配される光量の比が、設計値より大きく変動する傾向がみられる。また、上記各分岐コア部4,5に分配される光量の比が大きく変動して光量が低下した場合は、その分岐コア部から出射される格子状の光の、辺の長手方向における光の強度がばらつき、均一性(ユニフォーミティ)が損なわれる。そのため、入力体を検出できない死角が発生するおそれがある。
【0042】
また、上記実施形態においては、発光側光導波路コアC1の光出射側端部(各光出射路4b,5b先端の出光部4x,5y)と、各受光側光導波路コアC2の光入射側端部(受光部)とは、枠の内側に向かって反るレンズ状(平面視円弧状)になっていることが望ましい。上記発光側光導波路コアC1の光出射側端部を上記レンズ状とすることにより、これら光出射側端部から、枠状光導波路10の内縁に垂直でかつ互いに平行な光線を出射することができる。また、上記各受光側光導波路コアC2の光入射側端部を上記レンズ状とすることにより、これら光入射側端部の集光効率を高めることができる。上記各コアC1,C2の出光部および受光部をレンズ状としない場合は、別体のレンズ体を準備し、これを上記枠状光導波路10の検知空間S内の周縁に沿って設置してもよい。
【0043】
また、上記実施形態においては、光導波路10のコアC1,C2が、樹脂材料(高分子材料)を用いて形成されたポリマー系光導波路を例に説明したが、このコアC1,C2を構成する材料は、例えばガラス等、周囲に配設されるクラッド層6より屈折率の高い材料であればよい。ただし、上記コアC1,C2と周囲のクラッド層6との屈折率の差は、0.01以上であることが好ましく、上記形状のパターンニング性等も考慮すると、紫外線硬化樹脂等の感光性樹脂が最も好ましい。使用する紫外線硬化樹脂としては、アクリル系,エポキシ系,シロキサン系,ノルボルネン系,ポリイミド系等があげられる。
【0044】
さらに、上記コアC1,C2の周囲のクラッド層6は、上記紫外線硬化樹脂等の感光性樹脂のうち、上記コアC1,C2より屈折率の低い材料を用いればよい。その他にも、クラッド層6には、ガラス,シリコン,金属,樹脂等、平坦性を有する基板を兼用する材料を用いることもできる。さらに、クラッド層6は、コアC1,C2の下側のアンダークラッド層(後記の6b)のみとしてもよく、上記コアC1,C2を覆うオーバークラッド層(後記の6a)は、形成しなくてもよい。そして、上記枠状光導波路10は、プラズマを用いたドライエッチング法,転写法,露光・現像を用いたフォトリソグラフィ法,フォトブリーチ法等により作製することができる。
【0045】
つぎに、上記入力デバイスの作製方法の一例について説明する。
図2(a)〜(e)は、本発明の実施形態における入力デバイス用光導波路の製法を模式的に説明する断面図である。なお、図2においては、光導波路の発光側のみを図示しており、これと並行して作製される受光側の図示を省略している。また、図中の符号C1はコア(発光側の光導波路コア)、6aはオーバークラッド層、6bはアンダークラッド層、21は基台、22は成形型であり、図2の(a)〜(e)は、光導波路が作製される工程順を表す。
【0046】
まず、枠状の光導波路を形成するための基台21を準備し、平坦な場所に載置する。この基台21の材質は、作製されるポリマー系光導波路を、後に剥離可能な材質が選択される。
【0047】
ついで、図2(a)に示すように、上記基台21の表面に、アンダークラッド層6bを形成する。このアンダークラッド層6bは、感光性樹脂を形成材料として、フォトリソグラフィ法により形成することができる。アンダークラッド層6bの厚さは、例えば、5〜50μmの範囲内に設定される。
【0048】
つぎに、図2(b)に示すように、上記アンダークラッド層6bの表面に、フォトリソグラフィ法により、パターン形状の発光側光導波路コアC1および受光側光導波路コアC2(図示せず)を形成する。これらコアC1(およびC2)の形成材料としては、上記アンダークラッド層6bおよび後記のオーバークラッド層6aの形成材料よりも屈折率が高い感光性樹脂が用いられる。なお、先に述べたように、上記発光側光導波路コアC1および受光側光導波路コアC2の枠の内縁部〔各光出射路4b,5b先端の出光部4x,5yと各受光側光導波路コアC2の光入射側先端の受光部:図1(a)参照〕は、平面視レンズ状に形成される。
【0049】
ついで、オーバークラッド層6a形成用の、透光性を有する成形型22を準備する。この成形型22には、図2(c)に示すように、オーバークラッド層6aの表面形状に対応する型面を有する凹部(成形キャビティ)が形成されており、この実施形態では、上記各光出射路4b,5bの先端側端部を覆う部位〔図2(c)の右端部分〕が、上下方向(光導波路の厚み方向)に1/4円の円弧状のレンズ曲面に形成されているものを使用している。
【0050】
ついで、この成形型22を、上記凹部を上にして(天地を逆にして)、成形型22を成形ステージ(図示せず)の上に設置し、まず、上記凹部内にオーバークラッド層6a形成用の感光性樹脂(ワニス状)を充填する。ついで、アンダークラッド層6b上に形成したコアC1を、上記成形型22の凹部に対して位置決めし、その状態で、上記アンダークラッド層6bを上記成形型22に押圧し、上記ワニス状のオーバークラッド層6a形成用の感光性樹脂の中にコアC1を浸す。そして、この状態で、紫外線等の照射線を、上記成形型22を透して上記感光性樹脂に照射し、その感光性樹脂を露光する。これにより、上記感光性樹脂が硬化して、図2(d)に示すような、コアC1(およびC2)の内縁側先端部に対応する部位がレンズ状に形成されたオーバークラッド層6aが形成される。
【0051】
つぎに、上記感光性樹脂の硬化が完了した後、上記成形型22からオーバークラッド層6aをコアC1,アンダークラッド層6bおよび基台21とともに脱型し、上記基台21を剥離させて取り除くことにより、図2(e)に示すような、枠状の光導波路10を得る。
【0052】
ついで、図1(a)に示すように、得られた枠状光導波路10の角部10zの所定位置に、コアC1の共通部1の端面(光結合面)に正対するように光源20を配置し、共通部1の光軸と光源20の光軸とを調芯して位置決めする。また、受光側にも受光素子アレイ30を取り付け、図示しない配線等を接続することにより、本実施形態における入力デバイスを作製することができる。
【実施例】
【0053】
つぎに、本発明の入力デバイスの効果を実証する試験として行った「実施例」について説明する。ただし、本発明は、以下の実施例に限定されるものではない。
【0054】
本実施例においては、上記発光側光導波路コアC1の共通部1における「光入射側の端面(光結合面)からコアの分岐点までの距離L」と、「光入射側端面のコア幅W」との比(L/W)を種々変更した光導波路を作製し、これに光源を接続して入力デバイスを構成するとともに、作製した供試用の入力デバイス(サンプル01〜15)を用いて、図1(b)に示すように、光源20の光軸Oと共通部1の中心軸(一点鎖線)とが一致した状態(ブランク)における枠の辺の一方側に分配される光量(受光強度)と、上記光源20の光軸Oが共通部1の中心軸に対して水平方向(図中の矢印A方向または矢印B方向)に50μmずれた状態における一方側の分配光量とを測定し、上記光源20の調芯のずれによる影響を検証した。
【0055】
まず、光導波路の形成材料を準備した。
〔アンダークラッド層の形成材料〕
成分A:脂環骨格を含むエポキシ樹脂(ダイセル化学工業社製,EHPE3150)75重量部
成分B:エポキシ基含有アクリル系ポリマー(日油社製,マープルーフG−0150M)25重量部
成分C:光酸発生剤(サンアプロ社製,CPI−200K)4重量部
これら成分A〜Cを、紫外線吸収剤(チバジャパン社製,TINUVIN479)5重量部とともに、シクロヘキサノン(溶剤)に溶解することにより、アンダークラッド層の形成材料を調製した。
【0056】
〔コアの形成材料〕
成分D:ビスフェノールA骨格を含むエポキシ樹脂(ジャパンエポキシレジン社製,157S70)85重量部
成分E:ビスフェノールA骨格を含むエポキシ樹脂(ジャパンエポキシレジン社製,エピコート828)5重量部
成分F:エポキシ基含有スチレン系ポリマー(日油社製,マープルーフG−0250SP)10重量部
これら成分D〜Fと上記成分C 4重量部とを、乳酸エチルに溶解することにより、コアの形成材料を調製した。
【0057】
〔オーバークラッド層の形成材料〕
成分G:脂環骨格を有するエポキシ樹脂(ADEKA社製,EP4080E)100重量部
この成分Gと上記成分C 2重量部とを混合することにより、オーバークラッド層の形成材料を調製した。
【0058】
<光導波路の作製>
〔アンダークラッド層の形成〕
まず、ステンレス製の基台(平板状)の表面に、上記アンダークラッド層の形成材料を塗布した後、160℃×2分間の乾燥処理を行い、感光性樹脂層を形成した。ついで、上記感光性樹脂層に対し、紫外線を照射して積算光量1000mJ/cm2の露光を行い、厚さ20μmのアンダークラッド層を形成した〔図2(a)参照〕。
【0059】
〔コアの形成〕
ついで、上記アンダークラッド層の表面に、上記コアの形成材料を塗布した後、170℃×3分間の加熱処理を行い、溶媒を揮散させてコア形成用の感光性樹脂層を形成した。つぎに、上記分岐状でかつそのコアの共通部における「端面から分岐点までの距離L」と「端面の幅W」が所定形状になった開口パターンが形成されたフォトマスクを介して(ギャップ100μm)紫外線を照射し、積算光量3000mJ/cm2の露光を行った後、120℃×10分間の加熱処理を行い、樹脂の硬化を完了させた。そして、現像液(γ−ブチロラクトン)を用いてディップ現像することにより、未露光部分を溶解除去した後、120℃×5分間の加熱乾燥処理を行うことにより、パターニングされた厚さ(高さ)50μmの分岐状コアを形成した。
【0060】
〔オーバークラッド層の形成〕
つぎに、オーバークラッド層形成用の、透光性を有する成形型を準備した。この成形型は、オーバークラッド層の表面形状に対応する成形キャビティを備えている。そして、その凹部を上にして、成形型を成形ステージの上に設置し、上記凹部に、前記のオーバークラッド層の形成材料を充填した。
【0061】
ついで、上記アンダークラッド層の表面にパターン形成したコアを、上記成形型の凹部に対して位置決めし、その状態で、上記アンダークラッド層を上記成形型に押圧し、上記オーバークラッド層の形成材料(ワニス状)に、上記コアを浸した。そして、この状態で、紫外線を、上記成形型を透して上記オーバークラッド層の形成材料に照射して積算光量8000mJ/cm2の露光を行い、コアの先端部に対応するオーバークラッド層の部分が、上下方向に略1/4円弧状のレンズ曲面(曲率半径1.5mm)に形成されたオーバークラッド層を形成した。
【0062】
つぎに、上記成形型から、上記オーバークラッド層を、アンダークラッド層およびコアとともに脱型させるとともに、上記基台をアンダークラッド層から剥離して、入力デバイス作製用の光導波路(総厚1mm)を得た。
【0063】
<供試用入力デバイスの作製>
〔光源の取り付け〕
得られた枠状の光導波路の角部に位置する、発光側の光導波路コアC1の共通部1の端部(光結合面)1aに当接する所定位置〔図1(b)参照〕に、発光強度(または出力)が3mWのVCSEL光源(Optowell社製)を配設し、共通部1の中心軸上に上記光源の発光部(幅H=10μm)の中心がくるように、調芯・位置合わせしてこの光源を固定し、供試用の入力デバイスを作製した。なお、上記光源の発光部の発光面とコアC1の共通部1の光結合面(1a)との距離(隙間)は300μmとした。また、光導波路のコア幅,コア高さの測定には、レーザー顕微鏡(キーエンス社製)を、コア中心および光源のずれ量の測定には、光学顕微鏡(オリンパス社製 MX51)を用いた。
【0064】
〔測定用受光素子ユニットの取り付け〕
ついで、光強度測定用の受光素子ユニット(Optowell社製 CMOSリニアセンサアレイ)を準備し、上記発光側光導波路コアC1の各光出射路4bの先端(出光部4x)から出射される光(信号)が、このセンサアレイの個々の受光素子に全て入射するように上記受光素子ユニットを位置決めし、その状態で、上記枠状光導波路10に接着剤等で固定して、枠の辺の一方(この場合は長辺10X)側に分配される全光量と、各出光部4xごとの光強度を個別に測定できるように準備した。
【0065】
<光強度の測定および評価>
上記供試用の入力デバイスを用いて、まず、光源の光軸とコアの共通部の中心軸とが一致した状態で、光源を発光させて850nmの赤外線をコアの光結合面から入射させ、枠の辺の一方側に分配される全光量(ブランク)を測定した。ついで、上記光源の光軸を水平方向に±50μm〔図1(b)における矢印A方向を「+」側、矢印B方向を「−」側とする〕移動させた状態でそれぞれ、枠の辺の一方側に分配される全光量(計測値)を測定し、下記式(1)により、上記光源の光軸をずらした場合の変化率の最大値を求めた。
変化率(%) = (|計測光量−ブランク光量| / ブランク光量)・・・(1)
【0066】
用意した入力デバイスの供試品における「光入射端面のコア幅W」と「光入射端面から分岐点までの距離L」との組み合わせは、後記の「表1」および「表2」のとおりである。上記表1,2中のおける適否の判定は、光源の光軸をずらした場合の「一辺側の光量の最大変化率(%)」を基準に行い、その最大変化率が5%以下のものを「○」、最大変化率が5%を越えるものを「×」と判定した。
【0067】
そして、上記測定結果における「光入射端面から分岐点までの距離Lと光入射端面のコア幅Wとの比(距離L/コア幅W)」と「光軸をずらした場合の光量変化率の最大値(光量の最大変化率)」との関係をプロットした散布図を「図3」に示す。
【0068】
【表1】

【0069】
【表2】
【0070】
上記図3の散布図からも分かるように、「光量の最大変化率(%)」を基準とした場合、「距離L/コア幅W」が3.0を越えると、この光量の最大変化率が急激に低下していることが分かる。このように、本発明の入力デバイスは、光入射端面のコア幅Wが1mm(1000μm)未満の場合において、その性能の境界である「距離L/コア幅W(光入射端面から分岐点までの距離Lと光入射端面のコア幅Wとの比)」を3以上とすることにより、光源と発光側光導波路コアとの間の相対的な光軸のずれ(調芯ずれ)が生じた場合でも、コアの共通部から分岐後の各分岐コア部(2辺方向)に分配される光量の比が、所要の設計値から変動することを抑えることができる。また、上記実験における出光部の光強度の辺長手方向の分布から、検知空間に向かって出射されるそれぞれの光の強度も、枠の辺の長手方向に均一化されていることが確認された。
【0071】
なお、表2の「サンプル13〜15」にもその一例を示すとおり、光入射端面のコア幅Wが1mm(1000μm)以上の場合は、光入射端面から分岐点までの距離Lを3mm(3000μm)以上とすることにより、その光量の最大変化率が5%を下回るため、同様に使用することができる。
【産業上の利用可能性】
【0072】
本発明の枠状光導波路を用いた入力デバイスは、光源と二分岐状の発光側光導波路コアとの間の調芯に水平方向のずれが生じた場合でも、光源の光をこの光源に隣接する枠の2辺に所定の比率で正確に分配することができる。その結果、この入力デバイスは、検知空間内に死角のない、高精度な入力体の検出を行うことができる。
【符号の説明】
【0073】
1 共通部
1a 光入射端面
4 分岐コア部
5 分岐コア部
10 光導波路
10z 角部
20 光源
C1 光導波路コア
J 分岐点
S 検知空間
【技術分野】
【0001】
本発明は、枠状の光導波路内側の検知空間に、物体検出用の光の格子を形成するとともに、この格子状の光の部分的な遮蔽を検知することにより、この検知空間内における指やペン等の入力体の位置を検出する入力デバイスに関するものである。
【背景技術】
【0002】
コンピュータや各種機器に、指示や座標情報等を入力する入力インターフェースとして、枠状の検知空間内に形成した格子状の光の遮蔽を検出することにより、この検出空間内における指やペン等の入力体の位置を検出する、光学式の入力デバイスが使用されている。
【0003】
この光学式入力デバイスに用いられる光学的検出手段としては、従来、四角枠状のフレームにおいて、互いに対向する一方の辺に複数の発光素子が並設され、他方の辺に複数の受光素子が並んで配置され、上記発光素子から受光素子に向かって出射された光が、上記フレーム内に、縦横に交差する光の格子を形成し、指等による光の遮蔽を検出して、この指等(入力体)の位置を検出するようになっているものが知られている(例えば、特許文献1等を参照。)。
【0004】
しかしながら、上記のような多数の光学素子を使用する従来の光学的検出手段は、発光素子と受光素子との間の位置合わせ(アライメント)等の調整や製造の手間が多く、また部品点数も多いため品質がばらつき、歩留りが向上しない、といった数多くの問題があった。
【0005】
これに対して、本出願人は、特願2010−139063において、一辺に光出射用の発光側コアを有し、対応する他辺に光入射用の受光側コアを有する枠状の光導波路を用い、上記枠において隣接する2つの辺に挟まれた1つの角部の外縁に光源を配設するとともに、この光源の光を、上記隣接する2辺(互いに直交する2つの辺)に分配して、格子状の光の縦方向光および横方向光の両方の形成に利用することにより、アライメント調整等の手間が少なく、軽量、薄形で、かつ、デバイス全体で必要な光を1つの光源で賄うことのできる光学式入力デバイスを提案している。
【0006】
上記出願人の提案(特願2010−139063)にかかる入力デバイス(光導波路デバイス)は、図4(a)に示すように、フラットパネルディスプレイの周囲の額縁部等に配置されるものであり、この額縁部に、発光側の光導波路コア11および受光側の光導波路コア12を備える枠状光導波路と、光源20および受光素子(受光素子アレイ30)とが配設されている。なお、ここでは説明しないが、図中の符号14a,15aは後記の分岐コア部の「連絡路」に、符号14b,15bは後記の分岐コア部の「主路」に、符号14c,15cは後記の分岐コア部の「光出射絡路」に相当する部位である。
【0007】
上記発光側の光導波路コア11は、光源20に接して設けられた広幅状の共通部13と、この共通部13から分岐して枠の一辺方向(この例では長辺方向)に直線状に延びる第1の分岐コア部14と、共通部13の分岐点Jから90°湾曲して枠の他辺(短辺)方向に延びる第2の分岐コア部15とからなる、二分岐状のコアに形成されており、上記共通部13の光入射側端面(光結合面)13aからコアに入射した光源20の発光が、分岐点Jにおける上記第1の分岐コア部14と第2の分岐コア部15のコア幅の比(W1:W2)に応じた所定の比率に分配されるようになっている〔図4(b)参照〕。
【0008】
また、これら第1の分岐コア部14および第2の分岐コア部15の各光出射側端部(出光部14xおよび15y)から、上記光源20の光が額縁内の検知空間(領域)Sに出射(投射)されることにより、この検知空間S内に、縦横(xy方向)に交差する光の格子が形成される。そして、指やペン等による上記光の格子の遮蔽を、上記受光側光導波路コア12に繋がる受光素子アレイ30で感知し、感知した受光素子に対応する検知領域上の位置を特定することにより、上記指等が触れた部分の位置情報(座標等)を出力することができる。
【0009】
そして、上記光学式入力デバイスは、先に述べたように、分岐点Jから90°湾曲して枠の他辺方向に延びる第2の分岐コア部15のコア幅(W2)が、光を直線状に導通する第1の分岐コア部14のコア幅(W1)より広くなっていることにより、各辺に分配される光量を均等化することができる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特許第3682109号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、本発明者の研究によれば、上記のような枠状の光導波路を用いるとともに、その二分岐状の発光側光導波路コアを用いて、光源からの光を枠の2辺に分配する入力デバイスにおいては、上記二分岐状光導波路コアの分岐点における「一方の辺に向かうコアの幅と他方の辺に向かうコアの幅との比」(分配比)以外にも、上記枠の2辺に分配される光量の比を左右する要素があることが分かってきた。
【0012】
すなわち、図4(b)に示すように、通常、上記光源20は、その光軸(図中の点O)が上記発光側光導波路コア11の共通部13における光入射端面(光結合面)13aの幅方向中心軸(一点鎖線)と一致するように調芯(アライメント)して位置決めされている。しかしながら、デバイス設計の都合や、製造上全品を精密に調芯することが困難であること等により、共通部13の光入射端面13aからコアの分岐点Jまでの距離Lを充分に確保できない条件下(3mm以下)においては、組み立て等の際に、上記光源の光軸Oが光導波路の水平方向(例えば、図中の矢印A方向または矢印B方向)にずれた場合、コアの分岐点Jで一方の辺側(この場合は第1の分岐コア部14)に分配される光量と他方の辺側(この場合は第2の分岐コア部15)に分配される光量の比が、所要の設計値と異なってしまうおそれがあることを突き止めた。
【0013】
さらに、上記のように枠の一方の辺側と他方の辺側に分配される光量の比が所要の設計値と異なる場合、枠の内縁に位置する、発光側光導波路コア11の各光出射側端部〔出光部14xおよび15y:図4(a)参照〕から出射されるそれぞれの光の量(強度)が、枠の辺の長手方向にばらついて均一性(ユニフォーミティ)が低下し、上記検知領域における格子状の光の遮蔽の検出感度(すなわち「入力体の位置の検出精度」)が低くなる領域が生じる可能性があることを突き止めた。ここに改善の余地がある。
【0014】
本発明は、このような事情に鑑みなされたもので、光源と二分岐状の発光側光導波路コアとの間の調芯に水平方向のずれが生じた場合でも、光源の光をこの光源に隣接する枠の2辺に所定の比率で正確に分配することのできる入力デバイスの提供をその目的とする。
【課題を解決するための手段】
【0015】
上記の目的を達成するため、本発明の入力デバイスは、枠に囲われた空間が検知空間になっている四角枠状の光導波路と、この枠状光導波路の1つの角部の外縁に配設される光源と、複数の受光素子を備える受光手段と、上記光源から出射される光を互いに隣接する上記枠の2辺に所定の比率で分配する二分岐状の発光側光導波路コアと、上記枠の他の2辺にそれぞれ配置されて上記検知空間を通った光を受光手段に導く複数の受光側光導波路コアとを備え、上記二分岐状の発光側光導波路コアが、上記角部に配置された光入射側の共通部と、この共通部の終端側の分岐点から二股状に分岐して上記枠の2辺に配置された分岐コア部とを有し、この発光側光導波路コアの光出射側端部から対応する上記受光側光導波路コアの光入射側端部に到達する光が入力体で遮蔽されたことを検知することにより、上記検知空間内に位置する上記入力体の位置情報を取得する入力デバイスであって、上記発光側光導波路コアが、下記の(A)または(B)のいずれかの形状に形成されているという構成をとる。
(A)上記共通部の始端側の光入射端面のコア幅(W)が1mm以上に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上になっている形状。
(B)上記共通部の始端側の光入射端面のコア幅(W)が1mm未満に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が、上記光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕になっている形状。
【0016】
すなわち、本発明の発明者は、前記課題を解決するために、枠状の光導波路の光路に関する研究を重ね、枠の角部に配置された光源の光を隣接する枠の2辺方向に分配する二分岐状の発光側光導波路コアを備える入力デバイスにおいて、光源からの光を受け入れる幅広状の共通部の形状に着目した。そして、上記共通部の形状について実験を重ね、その結果、この幅広状の共通部における上記光入射側端面からコアの分岐点までの距離(L)を、上記光源と光導波路コアの調芯ずれに起因する分配光量の偏りを解消できるのに充分な長さとすることにより、上記枠の2辺方向に分配される光量の比が安定することを見出し、本発明に到達した。
【0017】
なお、本発明におけるコアの「幅」とは、枠状光導波路の辺に沿って延びるコアの長手方向と直交する方向の長さのことをいう。この長さは、枠の辺の面(水平面)上にあらわれる。また、「端面と分岐点との距離」等における「距離」もこれと同様、上記枠の水平面上における長さをいい、コアの「厚さ」とは、上記枠の水平面に垂直な上下方向の長さをいう。
【発明の効果】
【0018】
以上のように、本発明の入力デバイスは、発光側の二分岐状の光導波路コアの共通部が、光源に接する角部に配置され、この共通部の終端側の分岐点で分岐した2つの分岐コア部が、上記角部に隣接する2辺にそれぞれ配置されているとともに、上記共通部の始端側の光入射端面のコア幅(W)が1mm以上の場合は、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上に形成され、上記光入射端面のコア幅(W)が1mm未満の場合は、上記光入射端面から上記分岐点までの距離(L)が、この光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕に形成されている。そのため、この入力デバイスは、光導波路製造時の製造誤差や光源取付時の製作公差等に起因する、光源と発光側光導波路コアとの間の相対的な光軸のずれ(調芯ずれ)が生じた場合でも、この共通部から2辺方向に分岐した各分岐コア部に分配される光量の比が、所要の設計値から変動することを抑えることができる。
【0019】
また、上記分岐後の各分岐コア部が、枠の各辺の長手方向に沿って配置された幅広状の主路と、上記辺の長手方向に沿った所定のピッチごとに上記主路から分岐する複数の光出射路とを備え、上記各光出射路の光出射側端部が、上記枠の2辺の内縁に位置決めされているものは、上記のように共通部から各分岐コア部に分配される光量が安定するため、これら各分岐コア部の光出射側端部(出光部)から検知空間に向かって出射されるそれぞれの光の量(強度)も、枠の辺の長手方向に均一化する。これにより、本発明の入力デバイスは、枠(検知空間)の長手方向全域にわたって検出感度の揃った、死角のない高精度な入力体の位置検出を行うことができる。
【0020】
さらに、本発明の入力デバイスのなかでも、上記各分岐コア部の主路が、上記分岐側の始端から終端側に向かって徐々にコア幅が狭くなる略三角形状になっているものは、上記分岐コア部の各光出射側端部から出射される光量を、枠の辺の長手方向により均一なものとすることができる。
【図面の簡単な説明】
【0021】
【図1】(a)は本発明の入力デバイスの構成を示す平面図であり、(b)はそのP部拡大図である。
【図2】(a)〜(e)は、本発明の入力デバイスに用いられる枠状光導波路を作製する方法を説明する図である。
【図3】本発明の実施例における検証の結果を示す散布図である。
【図4】(a)は従来の入力デバイスの構成を示す平面図であり、(b)はそのQ部拡大図である。
【発明を実施するための形態】
【0022】
つぎに、本発明の実施の形態を、図面にもとづいて詳しく説明する。
【0023】
図1(a)に全体像を示す入力デバイスは、例えば、フラットパネルディスプレイ等の表示装置の画面の周囲に配置され、その枠状の光導波路10の中央部の空間(検知空間S)から露呈する上記画面の領域に、指やペン等の入力体で触れることにより、この入力体の位置を、上記検知空間S内の座標(x−y座標)として取得し、その位置情報をコンピュータやATM等の情報機器に出力するものである。
【0024】
上記枠状の光導波路10は、上記ディスプレイの画面のサイズに合わせて、横長(長辺Xの長さ:短辺Yの長さ=16:9)の長方形状に形成されたクラッド層6と、このクラッド層6に埋没するようにして形成された光路としてのコア(C1,C2)とからなり、その1つの角部10zの外縁に、光源20としての発光素子が、所定の向きに取り付けられている。なお、この枠状光導波路10は、別個に作製した4つの光導波路部材(ピース)10A,10B,10C,10Dを組み合わせて構成されている。
【0025】
また、上記枠状光導波路10には、上記クラッド層6の角部10zに隣接する枠の2辺(図においては長辺10Xと短辺10Y)に、上記光源20から出射される光を、互いに直交する上記2辺10X,10Y方向に所定の比で分配する発光側光導波路コアC1が設けられ、上記辺10X,10Yにそれぞれ対向する他の2辺(10X’,10Y’)に、上記発光側光導波路コアC1からの光を入射させて受光素子(受光素子アレイ30)に導くための複数の受光側光導波路コアC2が設けられている。
【0026】
さらに、上記発光側光導波路コアC1は、枠状光導波路10の角部10zに配置された光入射側の共通部1と、上記共通部1の分岐点Jで分配された光を枠の一辺(10X)方向および枠の他辺(10Y)方向に伝達する第1連絡路2および第2連絡路3と、広幅の主路4a,5aとこの主路4a,5aから分岐して検知空間Sに光を投射するための複数の分岐状光出射路4b,5bとを備える第1分岐コア部4および第2分岐コア部5とから形成されている。そして、上記二分岐状の発光側光導波路コアC1は、図1(b)のように、その共通部1の形状が、その始端側の光入射端面(光結合面)1aのコア幅Wが1mm以上の場合は、この共通部1における上記光入射端面1aから分岐点Jまでの距離Lが3mm以上に設定され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になるように設定されている。これが、本発明の入力デバイスの特徴である。
【0027】
上記入力デバイスについて、さらに詳しく説明すると、この入力デバイスに用いられる枠状光導波路10は、例えば、ポリマー系光導波路の場合、樹脂材料を用いて形成された枠状のクラッド層6(オーバークラッド層6aおよびアンダークラッド層6bからなる)の間に、フォトリソグラフィ法等により上記形状にパターニングされた発光側光導波路コアC1および上記複数の受光側光導波路コアC2が形成されている。
【0028】
上記発光側の光導波路コアC1は、上記光源20から出射される光を、互いに直交する上記2辺10X,10Y方向に所定の比で分配できるように、光源20に接する光入射側の端部(共通部1)から、枠のx方向(長辺10X側)の第1連絡路2とy方向(短辺10Y側)の第2連絡路3の2方向に分岐する、二分岐形状に形成されており、これら第1連絡路2および第2連絡路3の終端側(光出射側)にそれぞれ、上記枠の長辺10Xおよび短辺10Yに沿った形状の第1分岐コア部4および第2分岐コア部5が形成されている。
【0029】
上記発光側光導波路コアC1の共通部1は、図1(b)のように、第1連絡路2(コア幅:Wx)と第2連絡路3(コア幅:Wy)とを合わせたコア幅Wに相当する形状(この例においてはWx:Wy=1:1)に形成され、その一端側(図示右側)の光入射端面1aは、光源20からの光(白抜き矢印)が入射する光結合面(水平方向の幅W)となっている。なお、光入射端面1aの幅Wは、上記光源20との光結合を容易にするために、通常、光源20(発光素子20a)の発光部幅Hよりも広くなっている。例えば、発光素子20aの発光部幅Hが10μm程度である場合、上記光入射端面1aの幅は、40〜1000μmに設計される。また、上記光入射端面1aと発光素子20aの発光部との間の距離(隙間)は、通常300μm程度に設定される。そして、先に述べたように、上記共通部1における光入射端面(光結合面)1aのコア幅Wが1mm(1000μm)未満の場合、上記光入射端面1aから分岐点Jまでの距離Lは、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕に設定される。
【0030】
上記共通部1から分岐した一方の第1連絡路2は、分岐点Jにおける分岐後も上記光源20からの光を真っ直ぐに通過させることができるように、上記共通部1の一部を延長するように直線状に形成されており、一方の分岐コア部(第1分岐コア部4)に接続されている。なお、この例では、第1連絡路2の形状を、第1分岐コア部4まで同幅のストレート状としているが、この第1分岐コア部4に近づくにしたがって拡幅する三角状またはラッパ状としてもよい。
【0031】
上記分岐点Jで第1連絡路2と分岐した第2連絡路3は、図1(b)のように、この分岐点Jの直後から、1/4円形状(アーチ形状)に湾曲し、それより先端側が枠の短辺10Y側に直線状に延びる形状に形成されており、その終端が、他方の分岐コア部(第2分岐コア部5)に接続されている。なお、この第2連絡路3も、上記第1連絡路2と同様、第2分岐コア部5に近づくにしたがって拡幅する三角状またはラッパ状としてもよい。また、上記第2連絡路3は、この例においては上記第1連絡路2と同幅に形成されており、その幅Wy(および幅Wx)は、好ましくは20〜500μm、さらに好ましくは40〜300μmである。
【0032】
上記発光側光導波路コアC1における第1分岐コア部4は、上記第1連絡路2を通じて供給された光を、枠の一辺(長辺10X)に沿って分散させる細長の略三角形状の主路(第1主路)4aと、この主路4aから分岐する多数の光出射路4b,4b,・・・とからなる。これら光出射路4bは、辺10Xの長手方向に沿って所定のピッチごとに主路4aから次々と分岐する多分岐状に形成されており、その各先端(終端)側に設けられた光出射側端部(出光部4x)が、枠状光導波路10の検知空間S側内縁〔図1(a)においては上側縁〕の所定位置に、それぞれ位置決めされている。なお、上記例では、各出光部4xからの出光量を辺長手方向に揃えるために、上記主路4aの外縁側が、光入射側の始端部から終端側にかけて徐々に幅が狭くなる(所定角で傾斜する)形状に形成されているが、この上記主路4aは、全体のコア幅が長手方向に同じ(同幅)であってもよい。
【0033】
上記発光側光導波路コアC1における第2分岐コア部5も、上記第1分岐コア部4と同様、上記第2連絡路3を通じて供給された光を、枠の他辺(短辺10Y)に沿って分散させる細長の略三角形状の主路(第2主路)5aと、この主路5aから分岐する多数の光出射路5b,5b,・・・とからなり、これら各光出射路5bの先端(終端)側に設けられた光出射側端部(出光部5y)は、枠状光導波路10の検知空間S側内縁〔図1(a)においては右側縁〕の所定位置に、それぞれ位置決めされている。上記主路5aも、上記主路4aと同様、全体のコア幅が長手方向に同じ(同幅)であってもよい。
【0034】
そして、光源20からの光を上記各出光部4x,5yから出射(投射)させることにより、図1(a)のように、上記枠の内側の検知空間Sに、枠の縦横(xy方向)に交差する光の格子(点線、矢印は光の進行方向を示す)が形成される。なお、上記図1(a)における各光出射路4b,5b(および出光部4x,5y)は、図示が煩雑になるのを避けるため、その本数を減らして図示している(出射される光−点線矢印も同様)。上記光出射路4b,5bの本数(および出光部4x,5yの個数)は、入力デバイスのサイズや解像度等に応じて適宜設計されるが、例えば、上記第1分岐コア部4(長辺10X)側の光出射路4bの本数は200〜800本程度、上記第2分岐コア部5(短辺10Y)側の光出射路5bの本数は100〜600本程度のものが多用される。
【0035】
一方、上記発光側の光導波路コアC1に対して、検知空間Sを挟んで対向する辺(長辺10X’,短辺10Y’)には、上記各光出射路4b,5bの先端(出光部4x,5y)のそれぞれに対応する、受光側光導波路コアC2が複数形成されている。これら各受光側光導波路コアC2の光入射側の端部(受光部)は、上記発光側コアC1の各光出射側先端対向する枠の内縁〔図1(a)においては下側縁と左側縁〕の所定位置にそれぞれ位置決めされており、上記検知空間Sを通過して各受光側光導波路コアC2の先端(受光部)に入射した光が、これら各受光側光導波路コアC2の1本1本を通じて、受光素子アレイ30中で対応する個々の受光素子に導かれるようになっている。
【0036】
また、上記入力デバイスに用いられる光源20には、発光ダイオード(LED)または半導体レーザー等が用いられ、なかでも、光伝送性に優れるVCSEL(垂直共振器面発光レーザー)が好適に用いられる。上記光源20から出射される光の波長は、近赤外線(波長:700〜2500nm)が好ましい。
【0037】
さらに、この例では、図1(a)のように、上記光源20が枠状光導波路10の1つの角部10zの所定位置に配置され、その発光が、この角部10zに隣接する枠の2辺(10Xと10Y)に導かれるようになっている。そのため、このデバイス全体で必要な光を、1つの光源で賄うことができる。
【0038】
そして、上記入力デバイスに用いられる受光素子(アレイ30)としては、CCD,CMOS等のイメージセンサや、多数の受光素子が一列に並ぶCMOSリニアセンサアレイ等を用いることができる。
【0039】
上記構成の入力デバイスにおいては、先に述べたように、その共通部1の形状が、その始端側の光入射端面1aのコア幅Wが1mm以上の場合は、この共通部1における上記光入射端面1aから分岐点Jまでの距離Lが3mm以上に形成され、上記光入射端面1aのコア幅Wが1mm未満の場合は、上記光入射端面1aから分岐点Jまでの距離Lが、この光入射端面1aのコア幅Wの3倍以上〔(L/W)≧3〕になる形状に形成されている。これにより、製作公差等による光源20と共通部1との間の相対的な位置ずれ(調芯ずれ)が生じた場合でも、この共通部1から上記分岐後の各分岐コア部4,5(2辺方向)に分配される光量の比が、所期の設計値から変動するのを抑えることができる。また、上記光源20と共通部1(光導波路コアC1)との間の調芯の許容範囲が広くなり、入力デバイスの組み立てを簡略化することができる。
【0040】
また、上記発光側光導波路コアC1の共通部1から分岐後の各分岐コア部4,5に分配される光量の比が安定することから、これら各分岐コア部4,5の光出射路4b,5b先端に設けられた光出射側端部から検知空間Sに向かって出射される格子状の光の均一性(ユニフォーミティ)も向上する。これにより、本発明の入力デバイスは、枠(検知空間S)の長手方向全域にわたって検出感度の揃った、死角のない高精度な入力体の位置の検出を行うことが可能になる。
【0041】
なお、上記共通部1の光入射端面1aのコア幅Wが1mm未満である場合において、上記光入射端面1aから分岐点Jまでの距離Lが、光入射端面1aのコア幅Wの3倍未満〔(L/W)<3〕になると、共通部1から各分岐コア部4,5に分配される光量の比が、設計値より大きく変動する傾向がみられる。また、上記各分岐コア部4,5に分配される光量の比が大きく変動して光量が低下した場合は、その分岐コア部から出射される格子状の光の、辺の長手方向における光の強度がばらつき、均一性(ユニフォーミティ)が損なわれる。そのため、入力体を検出できない死角が発生するおそれがある。
【0042】
また、上記実施形態においては、発光側光導波路コアC1の光出射側端部(各光出射路4b,5b先端の出光部4x,5y)と、各受光側光導波路コアC2の光入射側端部(受光部)とは、枠の内側に向かって反るレンズ状(平面視円弧状)になっていることが望ましい。上記発光側光導波路コアC1の光出射側端部を上記レンズ状とすることにより、これら光出射側端部から、枠状光導波路10の内縁に垂直でかつ互いに平行な光線を出射することができる。また、上記各受光側光導波路コアC2の光入射側端部を上記レンズ状とすることにより、これら光入射側端部の集光効率を高めることができる。上記各コアC1,C2の出光部および受光部をレンズ状としない場合は、別体のレンズ体を準備し、これを上記枠状光導波路10の検知空間S内の周縁に沿って設置してもよい。
【0043】
また、上記実施形態においては、光導波路10のコアC1,C2が、樹脂材料(高分子材料)を用いて形成されたポリマー系光導波路を例に説明したが、このコアC1,C2を構成する材料は、例えばガラス等、周囲に配設されるクラッド層6より屈折率の高い材料であればよい。ただし、上記コアC1,C2と周囲のクラッド層6との屈折率の差は、0.01以上であることが好ましく、上記形状のパターンニング性等も考慮すると、紫外線硬化樹脂等の感光性樹脂が最も好ましい。使用する紫外線硬化樹脂としては、アクリル系,エポキシ系,シロキサン系,ノルボルネン系,ポリイミド系等があげられる。
【0044】
さらに、上記コアC1,C2の周囲のクラッド層6は、上記紫外線硬化樹脂等の感光性樹脂のうち、上記コアC1,C2より屈折率の低い材料を用いればよい。その他にも、クラッド層6には、ガラス,シリコン,金属,樹脂等、平坦性を有する基板を兼用する材料を用いることもできる。さらに、クラッド層6は、コアC1,C2の下側のアンダークラッド層(後記の6b)のみとしてもよく、上記コアC1,C2を覆うオーバークラッド層(後記の6a)は、形成しなくてもよい。そして、上記枠状光導波路10は、プラズマを用いたドライエッチング法,転写法,露光・現像を用いたフォトリソグラフィ法,フォトブリーチ法等により作製することができる。
【0045】
つぎに、上記入力デバイスの作製方法の一例について説明する。
図2(a)〜(e)は、本発明の実施形態における入力デバイス用光導波路の製法を模式的に説明する断面図である。なお、図2においては、光導波路の発光側のみを図示しており、これと並行して作製される受光側の図示を省略している。また、図中の符号C1はコア(発光側の光導波路コア)、6aはオーバークラッド層、6bはアンダークラッド層、21は基台、22は成形型であり、図2の(a)〜(e)は、光導波路が作製される工程順を表す。
【0046】
まず、枠状の光導波路を形成するための基台21を準備し、平坦な場所に載置する。この基台21の材質は、作製されるポリマー系光導波路を、後に剥離可能な材質が選択される。
【0047】
ついで、図2(a)に示すように、上記基台21の表面に、アンダークラッド層6bを形成する。このアンダークラッド層6bは、感光性樹脂を形成材料として、フォトリソグラフィ法により形成することができる。アンダークラッド層6bの厚さは、例えば、5〜50μmの範囲内に設定される。
【0048】
つぎに、図2(b)に示すように、上記アンダークラッド層6bの表面に、フォトリソグラフィ法により、パターン形状の発光側光導波路コアC1および受光側光導波路コアC2(図示せず)を形成する。これらコアC1(およびC2)の形成材料としては、上記アンダークラッド層6bおよび後記のオーバークラッド層6aの形成材料よりも屈折率が高い感光性樹脂が用いられる。なお、先に述べたように、上記発光側光導波路コアC1および受光側光導波路コアC2の枠の内縁部〔各光出射路4b,5b先端の出光部4x,5yと各受光側光導波路コアC2の光入射側先端の受光部:図1(a)参照〕は、平面視レンズ状に形成される。
【0049】
ついで、オーバークラッド層6a形成用の、透光性を有する成形型22を準備する。この成形型22には、図2(c)に示すように、オーバークラッド層6aの表面形状に対応する型面を有する凹部(成形キャビティ)が形成されており、この実施形態では、上記各光出射路4b,5bの先端側端部を覆う部位〔図2(c)の右端部分〕が、上下方向(光導波路の厚み方向)に1/4円の円弧状のレンズ曲面に形成されているものを使用している。
【0050】
ついで、この成形型22を、上記凹部を上にして(天地を逆にして)、成形型22を成形ステージ(図示せず)の上に設置し、まず、上記凹部内にオーバークラッド層6a形成用の感光性樹脂(ワニス状)を充填する。ついで、アンダークラッド層6b上に形成したコアC1を、上記成形型22の凹部に対して位置決めし、その状態で、上記アンダークラッド層6bを上記成形型22に押圧し、上記ワニス状のオーバークラッド層6a形成用の感光性樹脂の中にコアC1を浸す。そして、この状態で、紫外線等の照射線を、上記成形型22を透して上記感光性樹脂に照射し、その感光性樹脂を露光する。これにより、上記感光性樹脂が硬化して、図2(d)に示すような、コアC1(およびC2)の内縁側先端部に対応する部位がレンズ状に形成されたオーバークラッド層6aが形成される。
【0051】
つぎに、上記感光性樹脂の硬化が完了した後、上記成形型22からオーバークラッド層6aをコアC1,アンダークラッド層6bおよび基台21とともに脱型し、上記基台21を剥離させて取り除くことにより、図2(e)に示すような、枠状の光導波路10を得る。
【0052】
ついで、図1(a)に示すように、得られた枠状光導波路10の角部10zの所定位置に、コアC1の共通部1の端面(光結合面)に正対するように光源20を配置し、共通部1の光軸と光源20の光軸とを調芯して位置決めする。また、受光側にも受光素子アレイ30を取り付け、図示しない配線等を接続することにより、本実施形態における入力デバイスを作製することができる。
【実施例】
【0053】
つぎに、本発明の入力デバイスの効果を実証する試験として行った「実施例」について説明する。ただし、本発明は、以下の実施例に限定されるものではない。
【0054】
本実施例においては、上記発光側光導波路コアC1の共通部1における「光入射側の端面(光結合面)からコアの分岐点までの距離L」と、「光入射側端面のコア幅W」との比(L/W)を種々変更した光導波路を作製し、これに光源を接続して入力デバイスを構成するとともに、作製した供試用の入力デバイス(サンプル01〜15)を用いて、図1(b)に示すように、光源20の光軸Oと共通部1の中心軸(一点鎖線)とが一致した状態(ブランク)における枠の辺の一方側に分配される光量(受光強度)と、上記光源20の光軸Oが共通部1の中心軸に対して水平方向(図中の矢印A方向または矢印B方向)に50μmずれた状態における一方側の分配光量とを測定し、上記光源20の調芯のずれによる影響を検証した。
【0055】
まず、光導波路の形成材料を準備した。
〔アンダークラッド層の形成材料〕
成分A:脂環骨格を含むエポキシ樹脂(ダイセル化学工業社製,EHPE3150)75重量部
成分B:エポキシ基含有アクリル系ポリマー(日油社製,マープルーフG−0150M)25重量部
成分C:光酸発生剤(サンアプロ社製,CPI−200K)4重量部
これら成分A〜Cを、紫外線吸収剤(チバジャパン社製,TINUVIN479)5重量部とともに、シクロヘキサノン(溶剤)に溶解することにより、アンダークラッド層の形成材料を調製した。
【0056】
〔コアの形成材料〕
成分D:ビスフェノールA骨格を含むエポキシ樹脂(ジャパンエポキシレジン社製,157S70)85重量部
成分E:ビスフェノールA骨格を含むエポキシ樹脂(ジャパンエポキシレジン社製,エピコート828)5重量部
成分F:エポキシ基含有スチレン系ポリマー(日油社製,マープルーフG−0250SP)10重量部
これら成分D〜Fと上記成分C 4重量部とを、乳酸エチルに溶解することにより、コアの形成材料を調製した。
【0057】
〔オーバークラッド層の形成材料〕
成分G:脂環骨格を有するエポキシ樹脂(ADEKA社製,EP4080E)100重量部
この成分Gと上記成分C 2重量部とを混合することにより、オーバークラッド層の形成材料を調製した。
【0058】
<光導波路の作製>
〔アンダークラッド層の形成〕
まず、ステンレス製の基台(平板状)の表面に、上記アンダークラッド層の形成材料を塗布した後、160℃×2分間の乾燥処理を行い、感光性樹脂層を形成した。ついで、上記感光性樹脂層に対し、紫外線を照射して積算光量1000mJ/cm2の露光を行い、厚さ20μmのアンダークラッド層を形成した〔図2(a)参照〕。
【0059】
〔コアの形成〕
ついで、上記アンダークラッド層の表面に、上記コアの形成材料を塗布した後、170℃×3分間の加熱処理を行い、溶媒を揮散させてコア形成用の感光性樹脂層を形成した。つぎに、上記分岐状でかつそのコアの共通部における「端面から分岐点までの距離L」と「端面の幅W」が所定形状になった開口パターンが形成されたフォトマスクを介して(ギャップ100μm)紫外線を照射し、積算光量3000mJ/cm2の露光を行った後、120℃×10分間の加熱処理を行い、樹脂の硬化を完了させた。そして、現像液(γ−ブチロラクトン)を用いてディップ現像することにより、未露光部分を溶解除去した後、120℃×5分間の加熱乾燥処理を行うことにより、パターニングされた厚さ(高さ)50μmの分岐状コアを形成した。
【0060】
〔オーバークラッド層の形成〕
つぎに、オーバークラッド層形成用の、透光性を有する成形型を準備した。この成形型は、オーバークラッド層の表面形状に対応する成形キャビティを備えている。そして、その凹部を上にして、成形型を成形ステージの上に設置し、上記凹部に、前記のオーバークラッド層の形成材料を充填した。
【0061】
ついで、上記アンダークラッド層の表面にパターン形成したコアを、上記成形型の凹部に対して位置決めし、その状態で、上記アンダークラッド層を上記成形型に押圧し、上記オーバークラッド層の形成材料(ワニス状)に、上記コアを浸した。そして、この状態で、紫外線を、上記成形型を透して上記オーバークラッド層の形成材料に照射して積算光量8000mJ/cm2の露光を行い、コアの先端部に対応するオーバークラッド層の部分が、上下方向に略1/4円弧状のレンズ曲面(曲率半径1.5mm)に形成されたオーバークラッド層を形成した。
【0062】
つぎに、上記成形型から、上記オーバークラッド層を、アンダークラッド層およびコアとともに脱型させるとともに、上記基台をアンダークラッド層から剥離して、入力デバイス作製用の光導波路(総厚1mm)を得た。
【0063】
<供試用入力デバイスの作製>
〔光源の取り付け〕
得られた枠状の光導波路の角部に位置する、発光側の光導波路コアC1の共通部1の端部(光結合面)1aに当接する所定位置〔図1(b)参照〕に、発光強度(または出力)が3mWのVCSEL光源(Optowell社製)を配設し、共通部1の中心軸上に上記光源の発光部(幅H=10μm)の中心がくるように、調芯・位置合わせしてこの光源を固定し、供試用の入力デバイスを作製した。なお、上記光源の発光部の発光面とコアC1の共通部1の光結合面(1a)との距離(隙間)は300μmとした。また、光導波路のコア幅,コア高さの測定には、レーザー顕微鏡(キーエンス社製)を、コア中心および光源のずれ量の測定には、光学顕微鏡(オリンパス社製 MX51)を用いた。
【0064】
〔測定用受光素子ユニットの取り付け〕
ついで、光強度測定用の受光素子ユニット(Optowell社製 CMOSリニアセンサアレイ)を準備し、上記発光側光導波路コアC1の各光出射路4bの先端(出光部4x)から出射される光(信号)が、このセンサアレイの個々の受光素子に全て入射するように上記受光素子ユニットを位置決めし、その状態で、上記枠状光導波路10に接着剤等で固定して、枠の辺の一方(この場合は長辺10X)側に分配される全光量と、各出光部4xごとの光強度を個別に測定できるように準備した。
【0065】
<光強度の測定および評価>
上記供試用の入力デバイスを用いて、まず、光源の光軸とコアの共通部の中心軸とが一致した状態で、光源を発光させて850nmの赤外線をコアの光結合面から入射させ、枠の辺の一方側に分配される全光量(ブランク)を測定した。ついで、上記光源の光軸を水平方向に±50μm〔図1(b)における矢印A方向を「+」側、矢印B方向を「−」側とする〕移動させた状態でそれぞれ、枠の辺の一方側に分配される全光量(計測値)を測定し、下記式(1)により、上記光源の光軸をずらした場合の変化率の最大値を求めた。
変化率(%) = (|計測光量−ブランク光量| / ブランク光量)・・・(1)
【0066】
用意した入力デバイスの供試品における「光入射端面のコア幅W」と「光入射端面から分岐点までの距離L」との組み合わせは、後記の「表1」および「表2」のとおりである。上記表1,2中のおける適否の判定は、光源の光軸をずらした場合の「一辺側の光量の最大変化率(%)」を基準に行い、その最大変化率が5%以下のものを「○」、最大変化率が5%を越えるものを「×」と判定した。
【0067】
そして、上記測定結果における「光入射端面から分岐点までの距離Lと光入射端面のコア幅Wとの比(距離L/コア幅W)」と「光軸をずらした場合の光量変化率の最大値(光量の最大変化率)」との関係をプロットした散布図を「図3」に示す。
【0068】
【表1】
【0069】
【表2】
【0070】
上記図3の散布図からも分かるように、「光量の最大変化率(%)」を基準とした場合、「距離L/コア幅W」が3.0を越えると、この光量の最大変化率が急激に低下していることが分かる。このように、本発明の入力デバイスは、光入射端面のコア幅Wが1mm(1000μm)未満の場合において、その性能の境界である「距離L/コア幅W(光入射端面から分岐点までの距離Lと光入射端面のコア幅Wとの比)」を3以上とすることにより、光源と発光側光導波路コアとの間の相対的な光軸のずれ(調芯ずれ)が生じた場合でも、コアの共通部から分岐後の各分岐コア部(2辺方向)に分配される光量の比が、所要の設計値から変動することを抑えることができる。また、上記実験における出光部の光強度の辺長手方向の分布から、検知空間に向かって出射されるそれぞれの光の強度も、枠の辺の長手方向に均一化されていることが確認された。
【0071】
なお、表2の「サンプル13〜15」にもその一例を示すとおり、光入射端面のコア幅Wが1mm(1000μm)以上の場合は、光入射端面から分岐点までの距離Lを3mm(3000μm)以上とすることにより、その光量の最大変化率が5%を下回るため、同様に使用することができる。
【産業上の利用可能性】
【0072】
本発明の枠状光導波路を用いた入力デバイスは、光源と二分岐状の発光側光導波路コアとの間の調芯に水平方向のずれが生じた場合でも、光源の光をこの光源に隣接する枠の2辺に所定の比率で正確に分配することができる。その結果、この入力デバイスは、検知空間内に死角のない、高精度な入力体の検出を行うことができる。
【符号の説明】
【0073】
1 共通部
1a 光入射端面
4 分岐コア部
5 分岐コア部
10 光導波路
10z 角部
20 光源
C1 光導波路コア
J 分岐点
S 検知空間
【特許請求の範囲】
【請求項1】
枠に囲われた空間が検知空間になっている四角枠状の光導波路と、この枠状光導波路の1つの角部の外縁に配設される光源と、複数の受光素子を備える受光手段と、上記光源から出射される光を互いに隣接する上記枠の2辺に所定の比率で分配する二分岐状の発光側光導波路コアと、上記枠の他の2辺にそれぞれ配置されて上記検知空間を通った光を受光手段に導く複数の受光側光導波路コアとを備え、上記二分岐状の発光側光導波路コアが、上記角部に配置された光入射側の共通部と、この共通部の終端側の分岐点から二股状に分岐して上記枠の2辺に配置された分岐コア部とを有し、この発光側光導波路コアの光出射側端部から対応する上記受光側光導波路コアの光入射側端部に到達する光が入力体で遮蔽されたことを検知することにより、上記検知空間内に位置する上記入力体の位置情報を取得する入力デバイスであって、上記発光側光導波路コアが、下記の(A)または(B)のいずれかの形状に形成されていることを特徴とする入力デバイス。
(A)上記共通部の始端側の光入射端面のコア幅(W)が1mm以上に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上になっている形状。
(B)上記共通部の始端側の光入射端面のコア幅(W)が1mm未満に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が、上記光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕になっている形状。
【請求項2】
上記分岐後の各分岐コア部が、枠の各辺の長手方向に沿って配置された幅広状の主路と、上記辺の長手方向に沿った所定のピッチごとに上記主路から分岐する複数の光出射路とを備え、上記各光出射路の光出射側端部が、上記枠の2辺の内縁に位置決めされている請求項1記載の入力デバイス。
【請求項3】
上記各分岐コア部の主路が、上記分岐側の始端から終端側に向かって徐々にコア幅が狭くなる略三角形状になっている請求項1または2記載の入力デバイス。
【請求項1】
枠に囲われた空間が検知空間になっている四角枠状の光導波路と、この枠状光導波路の1つの角部の外縁に配設される光源と、複数の受光素子を備える受光手段と、上記光源から出射される光を互いに隣接する上記枠の2辺に所定の比率で分配する二分岐状の発光側光導波路コアと、上記枠の他の2辺にそれぞれ配置されて上記検知空間を通った光を受光手段に導く複数の受光側光導波路コアとを備え、上記二分岐状の発光側光導波路コアが、上記角部に配置された光入射側の共通部と、この共通部の終端側の分岐点から二股状に分岐して上記枠の2辺に配置された分岐コア部とを有し、この発光側光導波路コアの光出射側端部から対応する上記受光側光導波路コアの光入射側端部に到達する光が入力体で遮蔽されたことを検知することにより、上記検知空間内に位置する上記入力体の位置情報を取得する入力デバイスであって、上記発光側光導波路コアが、下記の(A)または(B)のいずれかの形状に形成されていることを特徴とする入力デバイス。
(A)上記共通部の始端側の光入射端面のコア幅(W)が1mm以上に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が3mm以上になっている形状。
(B)上記共通部の始端側の光入射端面のコア幅(W)が1mm未満に設定され、この共通部における光入射端面から上記分岐点までの距離(L)が、上記光入射端面のコア幅(W)の3倍以上〔(L/W)≧3〕になっている形状。
【請求項2】
上記分岐後の各分岐コア部が、枠の各辺の長手方向に沿って配置された幅広状の主路と、上記辺の長手方向に沿った所定のピッチごとに上記主路から分岐する複数の光出射路とを備え、上記各光出射路の光出射側端部が、上記枠の2辺の内縁に位置決めされている請求項1記載の入力デバイス。
【請求項3】
上記各分岐コア部の主路が、上記分岐側の始端から終端側に向かって徐々にコア幅が狭くなる略三角形状になっている請求項1または2記載の入力デバイス。
【図1】

【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2013−109492(P2013−109492A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252848(P2011−252848)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003964)日東電工株式会社 (5,557)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003964)日東電工株式会社 (5,557)
【Fターム(参考)】
[ Back to top ]