
入力操作装置
【課題】片足だけで、かつ、足を大きく動かさずに、親指の操作により、カーソルやポインタを制御できる入力操作装置を提供する。
【解決手段】足を乗せる足台に、X軸、Y軸、Z軸の力が加わる作用点を有し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサを取り付け、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンにより、三軸センサに力を加えて、足の親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置により、繊細な動きが可能な指先以外の足を使用して操作可能である。
【解決手段】足を乗せる足台に、X軸、Y軸、Z軸の力が加わる作用点を有し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサを取り付け、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンにより、三軸センサに力を加えて、足の親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置により、繊細な動きが可能な指先以外の足を使用して操作可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、足や肩などのように、手以外の体の部位により、パソコンディスプレイ上でマウスが行うと同様のカーソルやポインタ制御を行うことができる入力操作装置に関する。
【背景技術】
【0002】
従来、パソコンディスプレイ上でポインタやカーソルを移動させる入力装置としてマウスが使われているが、作業状況や身体的な障害によって手のひらと指先が使用できない場合、身体の他の部分を使用してマウスと同等の入力操作を行えるようにすることが望まれる。
【0003】
足を使用して入力操作を行うものとしては、スリッパ状の履物の裏側にトラックボールを設け、つま先部に複数のスイッチを設けたものが知られている。この入力装置では、スリッパを足に嵌めて床面を前後左右に移動させることにより、トラックボールを回転させてポインタやカーソル移動を行い、所望の位置において、足の親指などでつま先部のスイッチを操作して、クリック操作を行う入力装置である(特許文献1参照)。
また、下駄の前方半分に相当した板の先端部に2つのスイッチを設けて、一方を親指で、他方を残りの指で操作することにより2通りのクリック操作を行う入力装置がある(特許文献2参照)。
【0004】
また、左足で円盤状の操作板を前後左右の自由な方向に踏み込んで、ポインタやカーソルの移動方向を決定し、右足用の第1のべダルにより、ポインタやカーソルの移動速度を決めて移動させ、右足用の第2のべダルにより、クリック操作を行う入力装置がある(特許文献3参照)。
また、X、Y、Z方向の3軸の触圧を検出するロボット用の触圧センサが知られている(特許文献4参照)。
また、棒状のジョイスティックの周囲に4個の歪ゲージを設置して、棒のX、Y方向の加圧力を検出するジョイスティックが知られている(特許文献5参照)。
また、ジョイスティックを伸縮可能にし、クリック制御に使用するノートパソコン用の小型ジョイスティックが知られている(特許文献6参照)。
【特許文献1】特開2000−181621公報(第1頁、第1図等)
【特許文献2】特開2004−38387号公報(第1頁、第1図等)
【特許文献3】特開平10−55248号公報(第1頁、第1図等)
【特許文献4】特開2004−245717号公報(第1頁、図1、図3等)
【特許文献5】特開平7−302161号公報(第1頁、第1図等)
【特許文献6】特開2000−293305号公報(第1頁、第1図等)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記の特許文献1や特許文献2のような従来の入力装置では、足先だけでなく、下肢部を前後左右に動かす必要があった。足先だけを動かすことができる肢体不自由者には使えないという課題があった。また、特許文献3のような入力装置では、両足の使用が必要であり、片方の足先だけでの操作は困難であった。片足だけを大きく動かすことなく、カーソルやポインタを制御できる入力操作装置が必要である。
【課題を解決するための手段】
【0006】
本第一の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、足を乗せる足台を具備し、前記三軸センサを前記足台に取り付け、前記足台上に足を乗せたときに親指が乗る位置に設けた前記操作ボタンにより前記三軸センサを駆動して、親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置である。
かかる構成により、肢体不自由者が足で情報処理の操作を行えるようになる。
【0007】
本第二の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、前記操作ボタンが受ける圧力の内、X軸、Y軸の圧力を主として受け、中心部にZ方向に穴が開いた受圧部、を具備し、前記受圧部は、前記三軸センサの前記X軸作用点または作用面と、Y軸作用点または作用面に当接し、前記操作ボタンの下面中心部が前記中心部の穴を介して前記三軸センサの前記Z軸作用点または作用面に当接し、前記受圧部は、前記三軸センサの前記Z軸作用点または作用面に当接しない構造であることを特徴とする入力操作装置である。
【0008】
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。また、かかる構成により、繊細な動きが可能な指先以外の、繊細な動きが苦手な、あるいは、大きく動かすことが困難な、身体の他の部分を使用して操作可能である。
【0009】
本第三の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が凸を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタン、を具備し、X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置である。
【0010】
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。また、かかる構成により、繊細な動きが可能な指先以外の、繊細な動きが苦手な、あるいは、大きく動かすことが困難な、身体の他の部分を使用して操作可能である。
【0011】
本第四の発明の入力操作装置は、上記第二、第三入力操作装置と、足を乗せる足台を具備し、前記足台上に足を乗せたときに親指が乗る位置に前記入力操作装置を設け、親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置である。
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。
【0012】
本第五の発明の入力操作装置は、前記三軸センサのXセンサ出力に基づき表示器上の表示マークの左右方向の移動速度に対応するX速度制御情報を生成し、前記三軸センサのYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報を生成し、前記三軸センサのZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報を生成する情報処理部であって、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるための情報処理部を更に具備する。また、前記Xセンサ出力が所定の大きさ以下の場合、前記X速度制御情報を停止情報とし、前記Yセンサ出力が所定の大きさ以下の場合、前記Y速度制御情報を停止情報とする不感帯領域を設ける。
かかる構成により、肢体を大きく動かすことなく、手を用いるマウスで行うような入力操作を行えるようになる。
【発明の効果】
【0013】
本発明によってキーボードの打鍵やその他の作業で両手がふさがっている時にも、足を使用することによってパソコンのカーソル等を操作することができる。手の指と比較して運動制御機能の劣る足母指や身体の他の部分でも、大きく動かすことなく、X、Y方向のカーソルの移動と、Z方向のクリック操作が行いやすくなる。
【発明を実施するための最良の形態】
【0014】
(実施の形態1)
【0015】
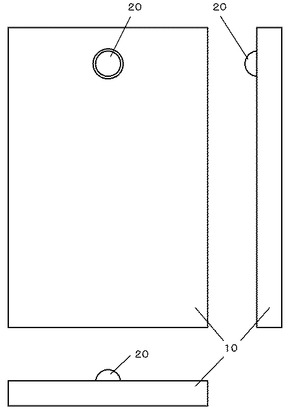
図1は、本発明の入力操作装置の外観図である。足を乗せる足台10の一端に、操作部20が設置される。操作部20は、足を足台10の上に乗せたときの親指の位置に設ける。操作部20は、通常、足の親指である第1指で、または、第1指と第2指で挟んで前後左右に移動または変位可能になっている。また、操作部20は、垂直方向に押し込むことができる。
【0016】
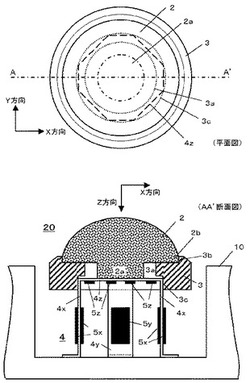
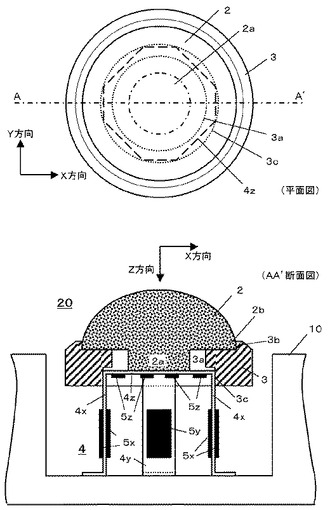
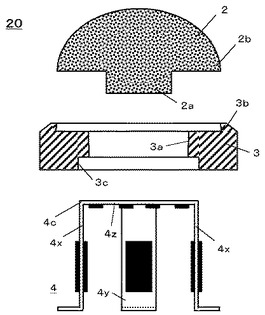
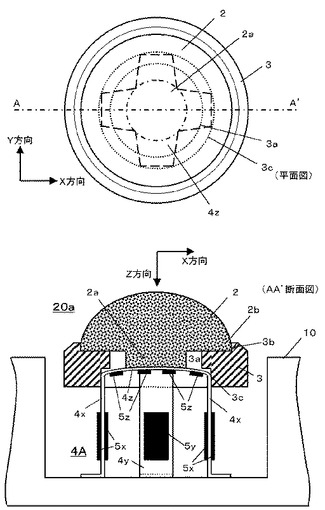
図2は、操作部20の構造の一例を示す図である。図2においては、操作部20の上面図と、A−A'における断面図を示している。操作部20は、球形の一部分の形をした操作ボタン2、操作ボタン2に加わる力を受ける受圧部3、操作ボタン2に加わるX方向、Y方向、Z方向の圧力を検出する三軸センサ4を具備する。図3は、操作部20の操作ボタン2、受圧部3、三軸センサ4を分離して示した分解図である。操作ボタン2の球形部は、足の親指で操作しやすい大きさであることが好適である。具体的には、操作ボタン2の球形部の直径は、15mm以上、30mm以下程度が好ましい。また、操作ボタン2の球形部は、直径約20mm程度であることがさらに好適である。
【0017】
操作ボタン2は、図2、図3に灰色で示した断面を有する回転対称形であり、半球よりやや小さめの球の一部分を成す上部に対して、その下部に円筒形のZ圧力伝達部2aを具備する。この例では操作ボタン2は、茸に似た形状である。操作ボタン2は、ゴムなどの弾性体、適度の硬さを有するプラスチック材料などが適している。
【0018】
受圧部3は、図3に示した斜線ハッチング部分の断面を有する回転対称形の円環である。上部外周には、枠3bを設ける。下部には、内面3aより半径の大きな下切り欠き部分3cを設ける。受圧部3にはZ方向に穴が開いていることになる。なお、内面3aと下切り欠き部分3cの径は、同じでもよいが、受圧部3がずり落ちるのを防ぐために、内面3aの径をやや小さめにしてもよい。
【0019】
三軸センサ4は、図2の平面図に八角形で示したZ起歪板4zの8辺の内、X向きに対向する2辺にL形状の2枚のX起歪板4xを設け、Y向きに対向する2辺にもL形状の2枚のY起歪板4yを設け、X起歪板4x、Y起歪板4y、Z起歪板4zには、歪ゲージ(ストレインゲージ)のようなX歪センサ5x、Y歪センサ5y、Z歪センサ5zをそれぞれ4個ずつ、合計12個貼り付けてある。X起歪板4x、Y起歪板4y、Z起歪板4zは、一枚の金属板をプレス加工などにより一体で形成し、図2、図3の形状に折り曲げて作成することができる。三軸センサ4の上部に相当するZ起歪板4zの形状は、八角形以外、例えば円形等でもよい。このような三軸センサ4は、上記特許文献4により公知であるので、詳しい説明は省く。
【0020】
三軸センサ4は、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知するセンサであって、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する。X軸の力が加わる作用点または作用面は、X起歪板4xの上端部分である。Y軸の力が加わる作用点または作用面は、Y起歪板4yの上端部分である。Z軸の力が加わる作用点または作用面は、三軸センサ4の上面に設けられたZ起歪板4zの中央部分である。なお、Z起歪板4zの周囲側面であって、X起歪板4x、Y起歪板4zがない部分にX、Y方向の力を加えても、X、Y方向の作用が加わるからX方向、Y方向の作用点を兼ねる。しかし、図2の三軸センサ4の場合は、X起歪板4x、Y起歪板4yの上端部分の方が作用点、作用面として優れている。
【0021】
操作ボタン2の外周部2bは、受圧部3の枠3bに嵌め込み固定される。操作ボタン2の外周部2bと受圧部3の枠3bは、接着剤等により結合してもよい。三軸センサ4の上部は、受圧部3の下切り欠き部分3cの中に嵌め込み固定される。最も好ましくは、各2枚のX起歪板4xとY起歪板4yの上部を下切り欠き部分3cにそれぞれ当接させる。Z起歪板4zの周囲部4cを、下きり欠き部分3cと接着剤等により結合してもよい。なお、Z起歪板4zの周辺上面は、受圧部3の下きり欠き部分3cの底に当接しないほうがよいので、下きり欠き部分3cの中に余り深く嵌め込まないようにする。操作ボタン2のZ圧力伝達部2aの下面は、Z起歪板4zの上面中央部に当接する。Z圧力伝達部2aの下面は、Z起歪板4zの上面と接着剤等により接着してもよい。
【0022】
受圧部3は、操作ボタン2が受ける圧力の内、X軸、Y軸の圧力を主として受ける。受圧部3の下切り欠き部分3cの内面は、三軸センサ4の上記X軸作用点(または作用面)と、Y軸作用点(または作用面)に当接する、X駆動点(または駆動面)、および、Y駆動点(または駆動面)になる。操作ボタン2の下面中心部であるZ圧力伝達部2aは、三軸センサ4の上記Z軸作用点(または作用面)に当接するZ駆動点(または駆動面)になる。受圧部3は、三軸センサ4のZ軸作用点(または作用面)には、当接しない構造である。
【0023】
以上の構成による操作部20は、図2の断面図に示したように、足台10に穿った穴の底に設置される。X起歪板4x、Y起歪板4yの下部のL型の足の部分は、足台10に穿った穴の底に螺子止め、または接着止めなどでよい。
【0024】
使用者が、足を足台10に乗せ、足の親指を操作ボタン2の上に当てて、操作ボタン2を左右方向(X方向)に動かそうとして圧力を加えると、X方向の圧力は、2枚のX起歪板4x上の4個のX歪センサ5xにより、Xセンサ出力として計測できる。使用者が、操作ボタン2を前後方向(Y方向)に動かそうとして圧力を加えると、Y方向の圧力は、2枚のY起歪板4y上の4個のY歪センサ5yにより、Yセンサ出力として計測できる。または、使用者が、操作ボタン2を下方向(Z方向)に押さえると、Z方向の圧力は、Z起歪板4z上の4個のZ歪センサ5zにより、Zセンサ出力として計測できる。
各X歪センサ5x、Y歪センサ5y、Z歪センサ5zから、Xセンサ出力、Yセンサ出力、Zセンサ出力を検出する回路は、上記特許文献4の図3、図4などで周知のブリッジ回路などを適用する。
【0025】
本実施の形態における操作部20は、操作ボタン2の外周部2bを、受圧部3の枠3bに当接させている。三軸センサ4の上部は、受圧部3の下切り欠き部分3cの中に嵌め込み固定される。Z起歪板4zの上面周囲は、受圧部3の下きり欠き部分3cの底に当接しない。操作ボタン2のZ圧力伝達部2aの下面は、Z起歪板4zの上面中央部に当接する。このようにすると、操作ボタン2にX方向の圧力を加えた場合、圧力は、主として、受圧部3の枠3bに集中する。枠3bは剛体であるから、X起歪板4の上部に圧力を伝え、X起歪板4の上部は、右方向に変形するが、Z起歪板4zには歪を起こさずZ起歪板4z全体を右に移動させるだけである。従って、X方向の圧力がZ起歪板4z上のZ歪センサ5zに及ぼす力は小さい。足で操作ボタン2にX方向の圧力を加えた場合、操作ボタン2にどうしてもZ方向の力が加わることは避けられないが、Z方向の分力は、受圧部3の枠3の内部の上切欠きの上面が主として受ける。この力は、X起歪板4xに対して垂直にかかるが、Z起歪板4zを変形させるようには働かない。残るZ方向の分力は、Z圧力伝達部2aを介して、Z起歪板4zに対してZ方向に加わるが、その大きさは、軽減される。従って、X方向の操作時に発生するZ方向のクロストークを減らすことができる。
【0026】
操作ボタン2のZ圧力伝達部2aは、Z起歪板4z全体に当接せず、Z起歪板4zの中央部分に主として当接しているので、Z方向の圧力によるZ起歪板4zの変形は大きくなる。よって、足によるZ方向の動作検出の感度を高くすることができる。受圧部3の内面3aとZ圧力伝達部2aの間に空隙を設けているので、受圧部3の力は、Z圧力伝達部2aを介してZ起歪板4zに加わることがない。従って、受圧部3は、専ら、X起歪板4xに歪を発生させるのに寄与できる。なお、以上の説明は、Y方向についても適用できるので、Y方向の操作によるZ方向へのクロストークも軽減できる。
【0027】
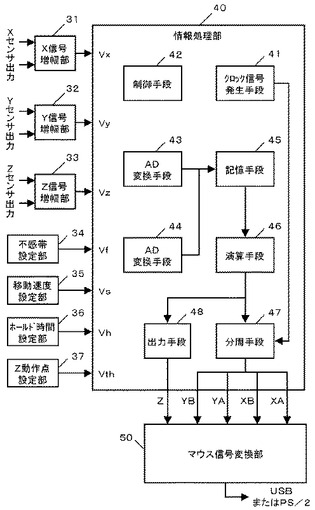
次に、Xセンサ出力、Yセンサ出力、Zセンサ出力から、ポインタやカーソルをパソコンディスプレイ上で操作するための情報であるポインタ制御情報を生成する方式について説明する。図4は、ポインタ制御情報を生成する回路のブロック図である。
【0028】
Xセンサ出力は、微小信号であるので、差動増幅器であるX信号増幅部31によりX信号Vxに増幅し、情報処理部40に供給される。Yセンサ出力は、差動増幅器であるY信号増幅部32によりY信号Vyに増幅し、情報処理部40に供給される。Zセンサ出力は、差動増幅器であるZ信号増幅部33によりZ信号Vzに増幅し、情報処理部40に供給される。
不感帯設定部34は、Xセンサ出力、または/およびYセンサ出力、または/およびZセンサ出力が所定以下の場合に、入力がないものとして動作しないような領域である不感帯領域を設定する手段である。
移動速度設定部35は、Xセンサ出力、または/およびYセンサ出力の出力に応じて、カーソルやポインタが移動する速度を設定する手段である。
ホールド時間設定部36は、Zセンサ出力を受け付けない時間を設定する手段である。
Z動作点設定部37は、Z方向の操作によるクリック操作ONの感度を設定する手段である。
【0029】
不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37は、それぞれ可変抵抗器であって、電源電圧を分圧して生成される不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthをそれぞれ情報処理部40に供給する。情報処理部40は、X信号Vx、Y信号Vy、Z信号Vz、不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthを受け入れ、ポインタ制御情報である信号XA、XB、YA、YB、Zを出力する。マウス信号変換部50は、ポインタ制御情報である信号XA、XB、YA、YB、Zを入力とし、パソコンで広く使用されているUSB形式やPS/2形式のシリアル情報のマウス出力信号を出力する機能を有する。マウス出力信号をパソコンに供給すると、パソコンディスプレイ上でカーソルやポインタの操作が行える。なお、信号XA、XBは、後述するX速度制御情報であり、信号YA、YBは、後述するX速度制御情報であり、信号Zは、後述するクリック情報である。
【0030】
情報処理部40において、AD変換手段43は、X信号Vx、Y信号Vy、Z信号Vzを、それぞれ、デジタル値Dsx、Dsy、Dszに変換し、デジタルメモリである記憶手段45に格納する。AD変換手段44は、不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthを、それぞれ、デジタル値F、Ks、Ht、Zthに変換し、記憶手段45に格納する。演算手段46は、上記各デジタル値を記憶手段45から読み出し、後述する演算を行い、演算結果を分周手段47、出力手段48に供給する。クロック信号発生手段41は、情報処理部40の各部にクロック信号を供給する。分周手段47は、演算手段46の演算結果に基づき、クロック周波数を分周して、ポインタ制御情報用の信号XA、XB、YA、YBを発生させ出力する。出力手段48は、演算手段46の演算結果に基づき、後述する信号Zの波形を発生させ出力する。制御部42は、情報処理部40の各部に動作指示などを行う。
【0031】
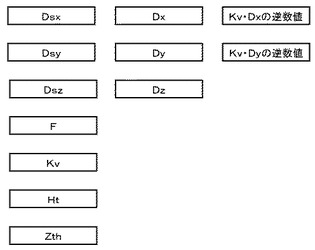
図5に、記憶手段45の記憶するデータを示す。デジタル値Dsx、Dsy、Dsz、デジタル値F、Ks、Ht、Zthを記憶するエリアに加えて、不感帯処理を行ったX方向のデジタル値Dx、不感帯処理を行ったY方向のデジタル値Dy、Z方向のクリックON/OFFを現すデジタル値Dzを記憶するエリア、および、Dx、Dyに速度係数Ksを乗算した数値の逆数値Kv・DxとKv・Dyを記憶するエリアを設ける。なお、不感帯処理とは、後述する(ステップS12)〜(ステップS15)と(ステップS17)、(ステップS19)による処理のように、入力変数に対する出力変数の関係を、入力変数が所定の領域内(入力の不感帯領域等という)の場合に、出力変数を全くあるいは殆ど変化させず、入力変数が前記所定の領域以下、または所定の領域以上の値の場合に、入力変数に応じて出力変数を変化させる入出力特性にすることを言う。
【0032】
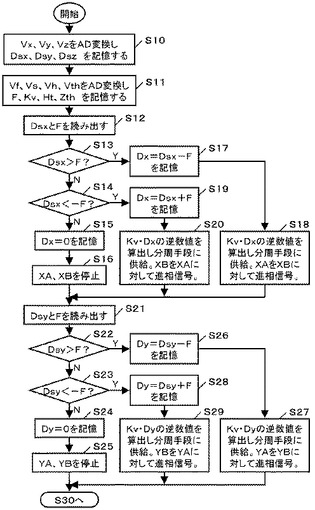
次に、情報処理部40の動作を、図6、図7、図8、図9のフローチャートにより説明する。図6において、情報処理部40に電源が入ると、制御部42は、記憶手段45の図5に示した各エリアのデータを消去する。次に、(ステップS10)において、AD変換手段43は、Vx、Vy、Vzの各信号をAD変換し、変換結果であるデジタル値Dsx、Dsy、Dszを図5に示した記憶手段45の各エリアに記憶する。次に(ステップS11)に進み、AD変換手段44は、Vf、Vs、Vh、Vthの各設定電圧をAD変換し、デジタル値F、Kv、Ht、Zthを図5に示した記憶手段45の各エリアに記憶する。次に(ステップS12)に進み、演算手段46は、DsxとFを読み出し、(ステップS13)において、DsxとFを比較し、Dsx>FがNoの場合、(ステップS14)に進み、Dsxと−Fを比較する。Dsx<−FがNoの場合、(ステップS15)に進み、記憶手段45にDx=0を記憶する。次に(ステップS16)に進み、分周手段47にDx=0を渡し、分周手段47は、ポインタ制御情報用の信号XA、XBのパルス状の交番変化を行なわず、停止情報とする。停止情報とは、それまでの信号XA、XB(1または0)の状態を維持し、交番変化しないことを指す。いいかえると、信号XA、XBは、周波数がゼロであり、カーソルやポインタの移動速度がゼロであることを表す移動速度情報となる。(ステップS13)においてYes(図面における「Y」)の場合は、X歪センサ5xによるデジタル値Dsxが不感帯の値Fより大きい。この場合、(ステップS17)に進み、演算手段46は、Dx=Dsx−Fを算出し、Dxを記憶手段45に記憶し、(ステップS18)に進み、Kv・Dxの逆数値を算出し、記憶手段45の該当するエリアに記憶し、更に分周手段47に供給する。分周手段47は、クロック信号をKv・Dxの逆数値に従って分周して、信号XAと信号XBを出力する。信号XAの位相を信号XBの位相に対して所定の時間またはデューティサイクル分だけ進相信号とする。
【0033】
(ステップS14)においてYesの場合は、X歪センサ5xによるデジタル値Dsxが不感帯の値Fより絶対値が大きい負の値である。この場合、(ステップS19)に進み、演算手段46は、Dx=(Dsx+F)を算出し、Dxを記憶手段45に記憶し、(ステップS20)に進み、Kv・Dxの逆数値を算出し、分周手段47に供給する。分周手段47は、クロック信号をKv・Dxの逆数値の絶対値に従って分周して、信号XAと信号XBを出力する。信号XBの位相を信号XAの位相に対して所定の時間またはデューティサイクル分だけ進相信号とする。
【0034】
(ステップS16)、(ステップS18)(ステップS20)の次に、(ステップS21)に進む。(ステップS22)から(ステップS29)において、演算手段46と分周手段47は、Y歪センサ5yによるデジタル値Dsyと不感帯の値Fに基づき、(ステップS13)から(ステップS20)と同様の処理ステップを実行する。
【0035】
操作ボタン2の操作力が十分に大きくなく、−F<Dsx<F、−F<Dsy<Fの範囲の場合は、Dx=0、Dy=0である。すなわち、X、Y方向に操作の不感帯をもうけていることになる。不感帯とは、小さな入力(力)を検知しても、出力としない領域(力の幅)のことである。
【0036】
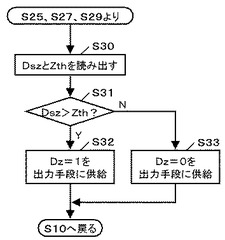
(ステップS25)、(ステップS27)(ステップS29)の次に、図7に示す(ステップS30)に進み、演算手段46は、Z方向についての情報処理を行う。まず(ステップS30)において、演算手段46は、記憶手段45からZ歪センサ5zによるデジタル値DszとZ動作点設定値Zthを読み出し、(ステップS31)に進む。(ステップS31)において、Dsz>Zthの場合、Z方向のクリック操作が十分に大きい力であると判定し、(ステップS32)に進み、演算手段46は、Dz=1を記憶手段45に記憶し、出力手段48にDz=1を供給する。(ステップS31)において、No(図面における「N」)の場合、Z方向のクリック操作がないものと判定し、演算手段46は、Dz=0を記憶手段45に記憶し、出力手段48にDz=0を供給する。(ステップS32)、(ステップS33)の処理後は、(ステップS10)に戻る。
【0037】
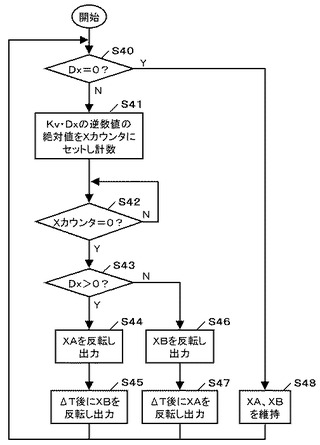
図8は、分周手段47が行う処理の手順のフローチャートである。(ステップS40)において、分周手段47は、Dxを読み出し、Dx=0かどうか判定する。Dx=1の場合、判定はNoであり、(ステップS41)に進み、記憶手段45からKv・Dxの逆数値を読み出し、その絶対値(正数)に比例した2進数CxをXカウンタにセットし、0に向けて、クロック信号発生手段41が生成するクロック信号に従って、計数を開始する。なお、分周手段47は、Xカウンタを具備する。Xカウンタは、クロック信号を計数するX軸用のカウンタで、信号XA、XBを生成するために使用する。Xカウンタは、周知のバイナリカウンタであって、ハードウェアにより構成できる。Xカウンタは、周知のフリップフロップを複数個従続接続し、クロック信号を各フリップフロップにより順次分周する構成であって、任意の2進数の各ビットを各フリップフロップに書き込むと、これらのフリップフロップにより構成されるレジスタは、その値をクロック信号に同期して、1ずつ減算し、かつ、各フリップフロップの出力をレジスタの値として読み出すことが出来る機能を有するデジタル回路である。次に、(ステップS42)に進み、Xカウンタ=0になるまでループし、Xカウンタ=0になるとYesになり、(ステップS43)に進む。(ステップS43)において、分周手段47は、記憶手段45からDxを読み出し、Dxの正負を判定する。Dxが正の場合、Yesであり、(ステップS44)に進む。(ステップS44)において、分周手段47は、信号XAを前の値から反転して出力する。すなわち、信号Xの値が0の場合、1とし、前の値が1の場合、0とする。次に(ステップS45)に進み、所定の時間ΔT待って、信号XBを前の値から反転して出力し、(ステップS40)に戻る。(ステップS43)において、Dxが負の場合、Noであり、(ステップS46)に進む。(ステップS46)において、分周手段47は、信号XBを前の値から反転して出力する。次に(ステップS47)に進み、所定の時間ΔT待って、信号XAを前の値から反転して出力し、(ステップS40)に戻る。(ステップS40)においてYesの場合、Dx=0、すなわち、X方向の操作による圧力が十分に小さい場合であって、(ステップS48)に進み、分周手段47は、信号XA、XB共に、それまでの出力レベルを維持し、(ステップS40)に戻る。(ステップS40)から(ステップS48)の一連の処理は、図6の(ステップS16)、(ステップS18)、(ステップS20)における分周手段47の行う処理に該当する。
【0038】
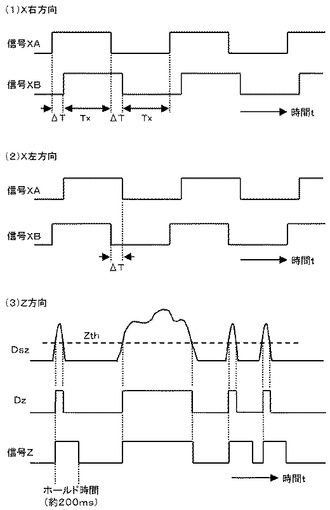
(ステップS44)、(ステップS45)、(ステップS46)、(ステップS47)により分周手段47が出力する信号XA、XBは、図10に示すような交番パルス信号になる。信号XA、XBの周期は、Kv・Dxの逆数値をXカウンタが計数する時間をTxとすると、2(Tx+ΔT)になる。信号XA、XBの周波数は、1/〔2(Tx+ΔT)〕になる。操作ボタン2をX方向に強く押すと、Dxは大きく、Txは小さくなり、周波数は高くなる。操作ボタン2をX方向に弱く押すと、Dxは小さく、Txは大きくなり、周波数は低くなる。図10の(1)X右方向では、信号XAが信号XBよりΔTだけ位相が進んだ信号とする。(2)X左方向では、信号XBが信号XAよりΔTだけ位相が進んだ信号とする。信号XAとXBのどちらの位相が進んでいるかを判定すれば、カーソルやポインタを左右どちらに移動させるかを決めることが可能になる。
【0039】
分周手段47は、Y方向のデジタル値Dyに対しても、図8において説明したと同様の処理手順により、記憶手段45からKv・Dyの逆数値を読み出し、その絶対値に対応する2進数CyをYカウンタにセットし、0に向けて計数を行い、信号YAと信号YBを出力する。Yカウンタは、上記Xカウンタと同様のデジタル回路により構成できる。信号YAと信号YBも、図10の信号XAと信号XBのようにΔTだけ位相差がある信号になり、信号YAとYBのどちらの位相が進んでいるかを判定すれば、カーソルやポインタをディスプレイ上の上下どちらに移動させるかを決めることが可能になる。
【0040】
なお、Xカウンタにセットする2進数Cx、すなわち、Kv・Dxの逆数値の絶対値に比例した2進数の数値の範囲は、次のようなものとする。信号XA、XBの周波数=1/〔2(Tx+ΔT)〕の範囲が、広く用いられている周知の手動マウスが内蔵するエンコーダから出力されるエンコーダ信号の周波数範囲になるような2進数値であればよい。すなわち、Kv・Dxの逆数値の絶対値からXカウンタ用の上記2進数Cxに変換する際に、上記周波数範囲を満足させる一定の係数を乗算するか、ビットシフトを行えばよい。また、逆数演算は、データ処理が複雑であるので、Kv・Dxの値を入力とし、(Kv・Dx)・Cx=一定値となるような2進数Cxを対応させた数値変換テーブルをROMとして記憶手段45内部に設けておいてもよい。演算手段46は、Kv・Dxの逆数値を演算の代りに、Kv・Dxを演算して分周手段47に供給し、分周手段47は、受け取ったKv・Dxの値を元に、上記数値変換テーブルを参照して、Xカウンタ用の2進数Cxを獲得することができる。これらの処理方法は、信号YA、YBに対しても適用できる。また、演算手段46が、上記数値変換テーブルを参照して、Xカウンタ用、Yカウンタ用の2進数Cx、Cyを獲得し、2進数Cx、Cyを分周手段47に供給するようにしてもよい。この場合は、記憶手段45には、図5におけるKv・Dxの逆数値とKv・Dxの逆数値の記憶エリアは不要になる。逆数演算の計算精度は、それほど必要ではない。従って、近似多項式による近似演算で十分である。数値変換テーブルの場合も、比較的小さなテーブルで十分である。
【0041】
上記説明では、図10に示した信号XAと信号XBの位相差は、その周波数が変わっても、時間差ΔT一定になる。その代わりに、信号XA、XBの位相差が一定になるようにしてもよい。このためには、2進数Cxの代りにCx/2をXカウンタにセットして、クロック信号を目標周波数の2倍の周波数にまず分周し、更に2分周する2段階の分周を行うようにし、2分周する際に、信号XAの反転時刻と信号XBの反転時刻が位相で90度の関係になるようにすればよい。また、上記、目標周波数の2倍の周波数にまず分周して生成したパルス信号を基にし、これを2分周する際に、位相0度の信号と90度位相が遅れた信号を生成しておき、(ステップS18)では、前者を信号XA、後者をXBとして出力し、(ステップS20)では、前者を信号XB、後者をXAとして出力するようにしてもよい。
【0042】
また、1チップマイコンなどで内蔵されている16ビットタイマー、8ビットタイマーなどのタイマーを利用して、信号XAと信号XBを生成してもよい。これらのタイマーは、任意の2進数を書き込むと、その数値を1チップマイコン内部の決められたクロック周波数に従って1ずつ数値を増加させ、全ビットが1または0になると、所定のプログラムに割り込みを発生させる機能を、一般的に有する。この機能を適用する場合について説明する。分周手段47は、タイマー割り込みにより起動されるプログラムにより信号XA、XBを生成する。信号XA、XB生成用のプログラムは、図8のフローチャートの代りに、以下の手順の流れとする。すなわち、(ステップS61)は、割り込み待ちのステップ、(ステップS62)は、割込み発生のたびに、2ビットの情報[AB]=[10]、[11]、[01]、[00]の4つのパターンを順番に切り替えて生成するステップ、(ステップS63)は、タイマーに上記2進数Cx/2の2の補数をセットしてカウントを開始させるステップ、(ステップS64)は、割り込み待ち状態に戻るステップであって、これら(ステップS61)〜(ステップS64)をループ状に構成する。タイマーに2進数Cx/2の2の補数がセットされ、カウントアップが完了して割り込みが発生すると、割り込みは、上記の信号XA、XB用のプログラム(ステップS61)〜(ステップS64)を起動する。上記プログラム処理は、割り込みのたびに、(ステップS63)において、タイマーに2進数Cx/2の2の補数をセットする。従って、タイマーは、2進数Cx/2個のクロック信号計数周期で、割り込み発生を繰り返すことになる。従って、[AB]は、[10]、[11]、[01]、[00]のパターンを繰り返すことになる。[AB]のパターンにより信号を作ると、[AB]の上位ビットAによる信号は、信号XAの交番信号波形になり、下位ビットBは、信号XAの波形より位相が90度遅れた信号XBの交番信号波形になる。信号XAの位相を信号XBの位相より90度遅らせる場合は、逆の順序、[AB]=[00]、[01]、[11]、[10]の順で4つのパターンを変化させれば良い。上記(ステップS62)のステップにおいて、Dxの正負判定を行い、その結果により[AB]の変化の順序を選択する。なお、Dx=0の場合には、信号XA、XBを変化させない停止情報にする必要があるが、上記割込みを受け付けない割込み禁止状態にすれば、[AB]は変化せず、信号XA、XBも、変化しない停止情報になる。上記[AB]=[10]、[11]、[01]、[00]のパターンは、記憶手段45に格納しておき、上記(ステップS62)のステップにおいて、プログラムにより記憶手段45から順番に読み出すようにすれば良い。読み出した[AB]は、信号XA、XBとして出力される。なお、この方式では、図6のフローチャートの(ステップS18)、(ステップS20)において、上記(ステップS61)〜(ステップS64)の割り込み処理を有効化(エネーブル)し、割り込みを起動させる手順に変更する。また、(ステップS16)においては、上記(ステップS61)〜(ステップS64)の割り込み処理の起動を無効化(ディスエーブル)する処理に変更する。なお、信号YA、YBについては、別のタイマーを使用して、上記信号XA、XBと同様の方法で生成することが出来る。
【0043】
図10の信号XA、XBでは、操作ボタン2を右方向に押した場合、信号XAの位相が信号XBに対して進み、カーソルやポインタをディスプレイ上でX右方向に移動するものとした。操作ボタン2を右方向に押した場合、逆に信号XBの位相が信号XAに対して進んでいる信号を生成し、マウス信号変換部50において、USBやPS/2のマウス出力信号に変換する際に、カーソルやポインタをディスプレイ上でX右方向に移動させるマウス出力信号を生成するようにしてもよい。
【0044】
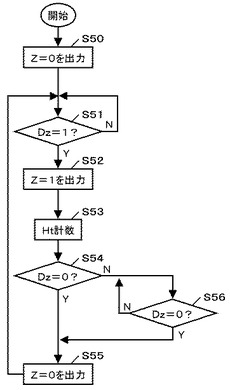
図9に、出力手段48が行う信号Zの生成、出力処理の手順のフローチャートを示す。情報処理部40に電源が入ると、(ステップS50)において、出力手段48は、Z=0を信号Zとして出力する。次に、(ステップS51)に進み、出力手段48は、記憶手段45のDzを読み出すか、演算手段46から受け取ったDzを使用して、Dz=1か否かを判定する。Dz=0の場合、Noであり、(ステップS51)を繰り返す。Dz=1になると、操作ボタン2がZ方向に強く押されたことを示す状態であり、判定はYesである。(ステップS52)に進み、出力手段48は、信号Z=1を出力する。次に(ステップS53)に進み、Zカウンタにホールド時間設定のデジタル値Htをセットし、0に向けて減算計数を行い、Zカウンタが0になるまで待つ。Zカウンタは、上記Xカウンタと同様のデジタル回路により構成できる。なお、Zカウンタは、1チップマイコンのタイマーを使用しても実現できる。Zカウンタが0になるまでの間は、信号Z=1が続くことになる。次に(ステップS54)に進み、Dz=0か否かを判定する。Dz=0であれば、操作ボタン2のZ方向の操作が終わっていることを示している。Dz=0の場合はYesであり、(ステップS55)に進み、出力手段48は、信号Zを1から0に変更して出力する。Dz=1の場合は、操作ボタン2がZ方向に操作され続けていることを示す。(ステップS56)に進み、出力手段48は、演算手段46から供給されるDzが0になるまで、(ステップS56)を繰り返し、Dz=0になると(ステップS55)に進み、出力手段48は、信号Zを1から0に変更して出力する。(ステップS55)の後は、(ステップS51)に戻り、Dz=1になるのを待つ。図9のような処理により、Z方向の加圧時間が短時間であっても、ホールド時間のデジタル値Htによって決まるパルス幅以上のパルスが、Z信号として出力される。図10の(3)Z方向にDsz、Dz、信号Zの波形の例を示す。DszがZthを越えるまでは、Dz=0で、信号Zが出ないので、Dsz=0〜Zthは、Z方向に対する不感帯になる。
【0045】
上記のような処理により、本発明の入力操作装置では、X、Y方向に操作ボタン2を押さえると、信号XA、XB、YA、YBが交番パルス信号として出力される。操作ボタン2を強く押さえると、図10に示した交番パルス信号XA、XB(YA、YBも同様)の周波数が高くなる。この出力信号は、周知の手動マウスに内蔵された回転式のエンコーダが生成する信号と同じ形式の信号である。時間当たりのパルス数が多いほど、マウスの移動が早く、カーソルやポインタの移動速度が大きくなる。信号XA、XB、YA、YBをパソコンのPS/2方式のマウスのシリアル出力信号に変換すれば、パソコンディスプレイ上でカーソルやポインタを左右上下に移動可能になる。従って、マウスを移動させる速度によりカーソルやポインタの移動速度を制御するのと同様の使い勝手が得られることになる。また、Z方向の圧力印加は、マウスの左クリックと同様の作用を行わせることに対応させることができる。
【0046】
上記、信号XA、XBは、三軸センサ4のXセンサ出力に基づき、パソコンやPDAやナビゲーションシステム等のディスプレイなどの表示器上のカーソルやポインタなどの表示マークの左右方向の移動速度に対応するX速度制御情報であり、信号YA、YBは、三軸センサ4のYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報である。信号Zは、三軸センサ4のZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報である。情報処理部4は、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるためのX速度制御情報、Y速度制御情報、クリック制御情報を生成する。
【0047】
図4におけるマウス信号変換部50は、信号XA、XB、YA、YB、Zを入力とし、パソコンで広く使用されているUSB形式やPS/2形式のマウス出力信号を出力する機能を有する。このようなマウス信号変換部50は、マウスコントローラと呼ばれ、専用の集積回路が知られているので、それらを使用すればよい。例えば、台湾の半導体メーカであるElan Microelectronics Corporation(義隆電子、以下ELAN)製の集積回路EM84502Aは、PS/2形式のマウス出力信号を出力する。USB形式やPS/2形式のマウス出力信号は、現在多用されており、周知の情報形式であるので、説明を省く。USB形式やPS/2形式のマウス出力信号は、X速度制御情報、Y速度制御情報、クリック制御情報を含んだ信号である。従って、情報処理部40は、マウス信号変換部50を含む概念としてもよい。また、パソコンなどにおいて、カーソルやポインタをパソコンディスプレイ上に表示し、マウス出力信号に基づき、カーソルやポインタの位置を制御し、移動速度を制御することは、広く行われており、その方法や構成は周知であるので、説明を省く。
【0048】
シリアルマウス出力信号としては、信号XA、XB、YA、YB、Zを適当なサンプリング周波数でサンプルし、その時点での「1」か「0」で表される5ビットの(XA、XB、YA、YB、Z)コードを同期符号か同期信号パターンを付加した直列のコード列として送信する形式が考えられる。しかしこれは、情報としては、信号XA、XB、YA、YB、Zを送信するのと等価といえる。USB形式やPS/2形式のマウス出力信号も、信号XA、XB、YA、YB、Zを送信するのと、情報としては等価といえる。
【0049】
次に、不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37の目的、意義について説明する。X信号増幅部31のX信号Vxは、操作ボタン2を操作しない状態でも、温度、経年変化などにより、0Vから多少ずれる。また、操作ボタン2をZ方向に押さえた場合でも、X方向にも多少の力が加わる場合がある。X信号Vxの小さな値は無視して、信号XA、XBが変化しない停止情報とし、不感帯以上の大きな圧力が加わった場合に、X方向の操作が行われたものとして、交番パルス状の信号XA、XBを出力する。Y方向についても、同様に、不感帯を設けている。操作ボタン2をZ方向に押したときに、カーソルやポインタのディスプレイ上での意図しない移動を防止できる。
【0050】
移動速度設定電圧Vsは、同じ圧力を操作ボタン2に加えている場合でも、カーソルやポインタのディスプレイ上での移動速度を変更する機能を有する。信号XA、XB、YA、YBの周波数は、移動速度設定電圧Vsに従って変更できるからである。カーソルやポインタのディスプレイ上での移動速度を好みに応じて変更できる。また、足に力には、かなりの個人差があるものと推定されるので、個人差を移動速度設定電圧Vsによって補償することにより、どのような人でも、カーソルやポインタのディスプレイ上での移動速度を同じ程度に設定することが可能になる。
ホールド時間設定部36のホールド時間設定電圧Vhを調節することにより、Z方向の操作が短時間の場合にも、必要なパルス幅のZ信号を得ることができる。
【0051】
Z動作点設定部37のZ動作点設定電圧Vthは、Z方向の操作によるクリック操作ONの感度を変更する機能を有する。Z動作点設定電圧Vthを小さくすると、Z方向の弱い操作でもZ信号を発生させて、Z方向のクリック操作ONにできる反面、操作ボタン2をX、Y方向に操作したときに発生するZ方向のクロストークに反応して、誤って、Z方向のクリックONにしてしまう恐れがある。一方、Z動作点設定電圧Vthを大きくすると、操作ボタン2をZ方向に強く押さないとZ方向のクリックONにならないので、足の力が弱い人には使いづらくなる。Z動作点設定部37により、使いやすいZ動作点の設定が可能になる。Z動作点設定電圧Vthやデジタル値Zthは、Z方向の不感帯に相当することになる。
【0052】
上記説明では、操作ボタン2を操作しない状態でのX信号増幅部31、Y信号増幅部32、Z信号増幅部33の各出力信号、X信号Vx、Y信号Vy、Z信号Vzの電圧値は、それぞれ、0V(ボルト)とし、操作ボタン2を右方向に押した場合、X信号Vxは正電圧となり、左方向の場合、負電圧になり、操作ボタン2を前方方向に押した場合、Y信号Vyは正電圧となり、手前の方向の場合、負電圧になり、正負の電圧、例えば、0V〜±5Vが出力されるものとした。また、Dsx、Dsyは、符号付の2進数であるものとして説明した。しかし、各信号増幅部に5V単電源の回路を使用し、また、負数を2の補数で表す表現など、他の2進数表現を適用しても、上記の各動作を実現できることは言うまでもない。
【0053】
次に、実際に試作した入力操作装置について、その特性を簡単に説明する。操作部20の操作ボタン2のX方向、またはY方向に5kgfの力を加えたときの、X歪センサ5x、Y歪センサ5yに発生する歪は、約1000με(ストレイン)であり、このときのX信号増幅部31、Y信号増幅部32の出力電圧は、±6V程度であった。またはZ方向に10kgfの力を加えたときの、Z歪センサ5zに発生する歪は、約350με(ストレイン)であり、このときのZ信号増幅部33の出力電圧は、+3V程度であった。AD変換手段43は、入力電圧±5Vに対応し、10ビットの出力で、−511〜0〜+512の範囲を表せる。不感帯設定電圧Vfによる不感帯デジタル値Fは、一例として約40程度である。
ホールド時間設定用のデジタル値Htは、クロック信号発生手段41のクロック信号周波数が1kHzの場合、10進数で150〜200、すなわち、150〜200m秒程度が適当であったが、これには限らない。
【0054】
情報処理部40のAD変換手段43、44、Xカウンタ、Yカウンタ、Zカウンタを除く部分は、通常、MPUやメモリ等から実現され得る。AD変換器、複数のカウンタまたはタイマー、クロックジェネレータなどを内蔵している1チップマイコンを使用しても良い。上記図6から図9において説明した処理手順は、通常、ソフトウェアで実現される。当該ソフトウェアは、制御部42内に設けたROM等の記録媒体に記録しておき、制御部42が読み出して、プログラムを実行する。図8の分周手段47の処理手順、図9の出力手段48の処理手順は、時間情報を扱うので、図6、図7における分周手段47、出力手段48以外の処理手順とは別々に処理するのが、プログラム作成上簡単である。このためには、信号XAとXBの生成手順、信号YAとYBの生成手順、信号Zの生成手順、および、それ以外の処理手順の4つのプログラムを並列で処理するマルチタスクの実行ができるプロセッサを使用すればよい。マルチタスクプロセッサを使用しない場合は、Xカウンタ、Yカウンタ、Zカウンタによる割込み処理を適用してもよい。また、分周手段47、出力手段48など情報処理部40の一部分、あるいは、情報処理部40全体をハードウェア(専用回路)で実現しても良い。
【0055】
記憶手段45は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37は、デジタル値を直接情報処理部40にパソコンなどにより供給するようにしてもよい。その場合、テンキーやキーボードやマウスやパソコンのメニュー画面によって、デジタル値F、Ks、Ht、Zthを設定することが可能である。
なお、図6から図9のフローチャートにおいて、処理プログラムを電源オフや処理終了の割り込みにより処理終了させてもよい。
【0056】
なお、Xセンサ出力、Yセンサ出力、Zセンサ出力は、微小であるので、ノイズが重畳しやすい。X信号増幅部31、Y信号増幅部32、Z信号増幅部33に高周波除去のフィルタ特性を持たせて、ノイズ除去を行ってもよい。AD変換手段43、44の出力データを時間的に平均してノイズを除去してもよい。情報処理部40にデジタルフィルタを設けてノイズ除去してもよい。また、上記不感帯は、ノイズの影響を除去する機能を有する。
【0057】
上記説明では、不感帯設定部34による不感帯設定電圧Vfに対して、デジタル処理によりX信号Vx、Y信号Vyに不感帯を付与した。X信号増幅部31、Y信号増幅部32を不感帯つきの演算増幅回路としてもよい。
【0058】
ノイズの除去や操作ボタン2の微小な動きなどにより、チャタリングのような信号が出る場合、X信号Vx、Y信号Vy、Z信号Vzに関しヒステリシス特性を付加してもよい。ヒステリシス回路も、演算増幅器を用いた回路により作成できる。あるいは、図7のフローチャートにおいて、DszがZthを超えてDz=1としても、一定量以上変化してZth以下にならない場合、Dz=1のままとする処理を加えれば、プログラム処理によりヒステリシス特性を実現できる。
【0059】
Z方向のクリックONの動作時に、カーソルやポインタがX、Y方向に意図しない移動をしないように、ZカウンタのHt計数中は、信号XA、XB、YA、YBの出力をそれまでと同じ0または1に維持する停止情報状態とすれば、カーソルやポインタは、ホールド時間中は上下左右に移動しないようにできる。図9の(ステップS53)を実行中は、信号XA、XB、YA、YBを変化させない停止情報とする手順を、図8のフローチャートの(ステップS45)、(ステップS47)の次に追加すればよい。
【0060】
本実施の形態のように、三軸センサ4のX、Y、Z軸のX歪センサ5x、Y歪センサ5y、Z歪センサ5zが、一体化されたX起歪板4x、Y起歪板4y、Z起歪板4zに設置されている場合、製造寸法誤差などがあると、Xセンサ出力、Yセンサ出力、Zセンサ出力の間にクロストークが発生する恐れがある。また、使用者は、操作ボタン2に正確に、X方向のみ、Y方向のみ、Z方向のみの圧力を加えることは、足などの場合、一般的に容易ではない。操作ボタン2の操作において、操作意図に相違して、他方向成分が混じるクロストーク成分が発生しがちである。本実施の形態では、そのようなクロストークの影響を、受圧部3や不感帯により軽減することが可能になる。特に肢体不自由などの身体障害者の場合、操作ボタン2をX、Y、Z方向に正確に操作することは容易ではないので、本発明は、身体障害者が足で入力操作を行うことを容易にする効果がある。
【0061】
なお、上記説明では、三軸センサ4のZ起歪板4zの中央部の作用面とZ圧力伝達部2a下面の駆動面が当接するものとしたが、空隙を隔てて互いに当接可能に対向する位置とし、Z方向の操作により、対向位置から互いに当接してZ圧力伝達部2aがZ起歪板4zを押し下げる構造にしてもよい。この場合、操作ボタン2の少なくとも上部や外周部分は弾性材料とし、操作ボタン2を押し下げたときに、Z圧力伝達部2aが、受圧部3の位置を基準として、押し下げられるようにしなければならないことは言うまでもない。
なお、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るので、三軸センサ4自体によるクロストークの発生を少なく出来る。
【0062】
なお、本実施の形態における入力操作装置は、足、特に足の親指、以外の部位を使用しても操作され得る。つまり、本入力操作装置は、繊細な動きが可能な指先以外の、繊細な動きが苦手な身体の他の部分を使用して操作可能である。
(実施の形態2)
【0063】
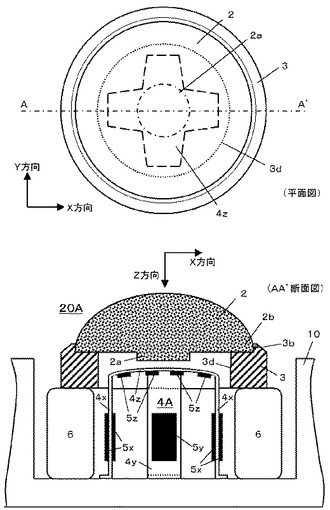
図11は、三軸センサ4の上面に位置するZ起歪板4zの形状を変更した三軸センサ4Aを用いた操作部20aの例である。図2の三軸センサ4のZ起歪板4zは、平面形状であった。本実施の形態におけるZ起歪板4zは、図11に示すように、上に凸の形状とする。このようにすると、Z起歪板4zにXY方向の力が働いた場合、Z起歪板4zは、上向きに変形しようとする。XY方向の操作に伴ってZ方向(下向き)の分力がZ圧力伝達部2aに掛かっても、上記上向きの変形と打ち消しあい、Z起歪板4zのZ方向(下向き)の歪は、全く、あるいは、殆ど発生しない。操作ボタン2をZ方向に押し下げると、Z起歪板4zは下向きに変形し、Xセンサ出力が発生する。図11の平面図のZ起歪板4z(破線)に示すように、Z起歪板4zの平面形状を十字型に近づけると、Z起歪板4zを下向きに変形し易くできる。
本実施の形態によれば、XY方向の操作によるZ方向へのクロストークが少なくなり、意図しないZ方向のクリックの発生が防止できる。
なお、X、Y、Zセンサ出力の処理は、実施の形態1と同様でよい。
【0064】
なお、上記説明では、三軸センサ4のZ起歪板4zの中央部の作用面とZ圧力伝達部2a下面の駆動面が当接するものとしたが、空隙を隔てて互いに対向する位置とし、Z方向の操作により、互いに当接してZ圧力伝達部2aがZ起歪板4zを押し下げる構造にしてもよい。この場合、操作ボタン2の少なくとも上部や外周部分は弾性材料とし、操作ボタン2を押し下げたときに、Z圧力伝達部2aが、受圧部3の位置を基準として、押し下げられるようにしなければならないことは言うまでもない。
なお、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るのでクロストークの発生を少なく出来る。角の部分の幅を減らしても同様の効果が得られる。
(実施の形態3)
次に、クロストークを防止する不感帯を、機構的に実現した本発明の入力操作装置を、図12により説明する。
【0065】
本実施の形態の操作部20Aにおいて、三軸センサ4Aは、実施の形態2において説明した三軸センサと同様である。なお、実施の形態1において説明した三軸センサ4でもよい。操作ボタン2は、実施の形態1において説明したとほぼ同様の構造である。Z圧力伝達部2aは、あってもなくてもよいが、図2の場合より短くしてある。受圧部3は、円盤の中心部に穴3dを空けた単純な構造でよい。受圧部3は、指示部6により支えられる。支持部6は、ゴム、ウレタン樹脂などの弾性材料で作ったもので、円形体の中心部が空いた形状である。なお、支持部6は、1つまたは複数個のばね、ばね材で作った支持体でもよい。なお、図12の平面図においては、支持部6を示す円を省いて描いてある。
【0066】
受圧部3の穴3dの内面は、三軸センサ4Aの外周より大きくする。従って、足を乗せただけの状態では、穴3dの内面は、三軸センサ4AのX軸、Y軸作用点または作用面であるX起歪板4x、Y起歪板4yの上部とは当接せず、X軸、Y軸駆動点と、X軸、Y軸作用点または作用面との間には、不感帯空隙ができる。操作ボタン2のZ圧力伝達部2aの下面は、Z駆動点であるが、Z軸作用点であるZ起歪板4zの中央部とは当接せず、不感帯空隙ができる。従って、操作ボタン2に意図しない方向の外力が少しだけ加わった場合には、各駆動点が、対応する各作用点または作用面に当接しないので、X、Y、Z各センサ出力は静止状態と変わらない。すなわち、クロストーク出力の発生が防止できる。
【0067】
なお、操作ボタン2は、実施の形態1と同様弾性体で作成してもよい。受圧部3は、金属、プラスチックス材料などが使用できる。また、操作ボタン2と受圧部3を一体として同じ材料で作成してもよい。上記駆動点と作用点または作用面との位置関係を上記不感帯空隙ができるようにする限り、操作ボタン2と受圧部3の形状は、変更してもよい。
【0068】
本実施の形態は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知して、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が、球の一部を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタンを具備し、X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置である。ここでのバックラッシュは、操作ボタン2が、XまたはY方向の中心位置の近くを前後左右に移動する際に、操作ボタン2の駆動力が三軸センサ4Aの作用点に働かないことにより起きる遊びと看做せる。
【0069】
なお、Z起歪板4zは、三軸センサ4の場合と同様、平面としてもよいことは言うまでもない。また、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るのでクロストークの発生を少なくできる。角の部分の幅を減らしても同様の効果が得られる。
なお、本操作部20AのX、Y、Zセンサ出力の処理は、実施の形態1と同様でよい。
(実施の形態4)
【0070】
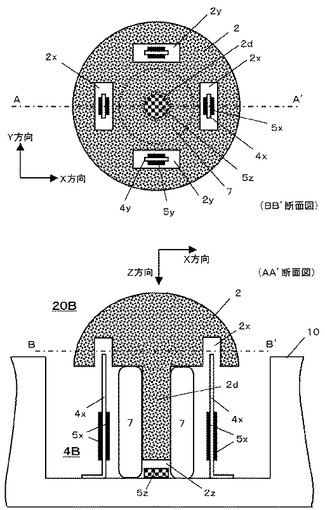
図13は、操作ボタン2の操作力が、X方向、Y方向、Z方向の歪センサに伝わる途中に、機械的な不感帯を設けた操作部20Bの実施の形態である。本実施の形態の三軸センサ4Bは、L形状のX起歪板4xをX方向に対向するように2枚設け、L形状のY起歪板4yをY方向に対向するように2枚設けられる。2枚のX起歪板4xには、X歪センサ5xが2個ずつ貼り付けられている。2枚のY起歪板4yには、Y歪センサ5yが2個ずつ貼り付けられている。4枚の起歪板は、足台10の底に固定される。Z歪センサ5zを4枚の起歪板の中央部、足台10の底に設置する。操作ボタン2は、半球形の上部を有し、下部に中心軸2dが設けられる。中心軸2は、Z圧力伝達部2dである。半球形の上部の下面には、X起歪板4xの上端部を挿入する挿入穴2xが2個、Y起歪板4yの上端部を挿入する挿入穴2yが2個、それぞれ、開けられている。ゴム、ウレタン樹脂などの弾性材料で作ったチューブ状の支持部7は、足台10の底に固定される。支持部7には操作ボタン2のZ圧力伝達部2dが挿入されている。歪センサ5zとZ圧力伝達部2dの間には、不感帯空隙2zが設けられる。X起歪板4x、Y起歪板4yの上端部は、挿入穴2x、2yに挿入されている。操作ボタン2が外力を受けない状態では、操作ボタン2は、支持部7により直立する。
【0071】
X起歪板4xの上先端部は、X歪センサ5xに歪を与える作用点であるのでX作用点と呼ぶ。Y起歪板4yの上先端部は、Y歪センサ5yに歪を与える作用点であるのでY作用点と呼ぶ。挿入穴2xは、X作用点にX方向操作力を加えるので、X駆動点と呼ぶ。挿入穴2yは、Y作用点にY方向操作力を加えるので、Y駆動点と呼ぶ。操作ボタン2が操作されない状態では、X起歪板4x、Y起歪板4yの上端部は、挿入穴2x、挿入穴2yのほぼ中央位置に位置し、X起歪板4xの上端部と挿入穴2xは当接せず、Y起歪板4yの上端部と挿入穴2yは当接せず、離れている。挿入穴2x、挿入穴2yは、不感帯の作用をするので、これらの隙間は、不感帯空隙2x、不感帯空隙2yとも呼べる。これらは、バックラッシュに相当する。
【0072】
操作ボタン2にX方向の圧力をかけるとX駆動点はX方向に動くが、不感帯空隙2xのために、最初は、X駆動点がX作用点に作用しない。更に圧力をかけると、X駆動点がX作用点に当接し、X起歪板4xが曲がり、X歪センサ5xより、Xセンサ出力が得られる。Y方向についても同様である。操作ボタン2をXYの斜め方向に操作した場合は、その方向角度に応じた圧力が、X方向とY方向に分圧されて、X作用点とY作用点にかかり、方向角度に応じたXセンサ出力とYセンサ出力が得られる。操作ボタン2に加える圧力方向をX方向からY方向へ徐々に変化させた場合も、連続的にXセンサ出力、Yセンサ出力が変化し、かつ、操作ボタン2から足指への反発力も連続的に変化し、操作感がよい。
【0073】
操作ボタン2をZ方向に押し下げた場合、不感帯空隙2zがZ圧力伝達部2dと歪センサ5zの間に設けられているので、小さい力では、歪センサ5zはZセンサ出力を出さない。操作ボタン2が、不感帯空隙2zを越えて押し下げられた場合、歪センサ5zに押圧力が加わり、歪センサ5zはZセンサ出力を出力する。Z圧力伝達部2dの下面は、Z駆動点であり、歪センサ5zの上面がZ作用点になる。
【0074】
従って、操作ボタン2をXY方向に操作したときに少々Z方向の力が働いても、不感帯空隙2zがあるため、Z方向のクロストークは発生しない。また、操作ボタン2をZ方向に押し下げた場合、少し斜めに押し下げても、不感帯空隙2x、2yがあるため、X駆動点はX作用点に、Y駆動点はY作用点に、それぞれ作用せず、ZからXYへのクロストークは発生しにくくなる。また、駆動点が作用点に当接する際に、クリック感が発生し、操作の制御がやりやすい。クリック間が不要の場合は、各空隙に粘性体を充填してもよい。
【0075】
本実施の形態では、X歪センサ5x、Y歪センサ5y、Z歪センサ5z相互は、機構的に分離されているので、三軸センサ4B自体においては、クロストークは発生しない。操作ボタン2の操作においては、操作力自体に、意図しない方向の操作力がクロストークの形で含まれるが、本実施の形態の操作部20Bでは、その影響を軽減できる。
【0076】
X歪センサ5x、Y歪センサ5y、Z歪センサ5zの出力を、信号XA、XB、YA、YB、Zに変換する方法は、上記実施の形態1において図4から図10により説明したのと同様の方法でよい。なお、不感帯設定部34、Z動作点設定部37に関する構成や処理は、あってもなくてもよい。不感帯空隙2x、2y、2zだけでクロストークの除去が完全でない場合は、不感帯設定部34、Z動作点設定部37に関する構成や処理を適用すればよい。
【0077】
なお、Z歪センサ5zは、ストレインゲージ以外に圧電素子でもよい。また、Z歪センサ5zは、機械的接点を有するタクトスイッチ、発光ダイオードと受光素子による光インタラプタ、磁石とホール素子を用いた近接スイッチなどの、ON/OFF検出スイッチでもよい。この場合は、情報処理部40のZ信号Vzは、デジタル値Dzとして使用できる。これらのセンサやスイッチを含めて、5zは、Z軸センサと呼べる。Z軸センサとして光インタラプタを使用する場合で、遮光板をZ圧力伝達部2dに取り付ける場合は、遮光板が発光ダイオードの光を遮る位置の光線自体が作用点に相当し、遮光板自身が光線に対する駆動点であると定義することができる。すなわち不感帯空隙2zを設けるとは、遮光板と発光ダイオード、受光素子の距離を適当な間隔空けることである。また、Z圧力伝達部2dが、光インタラプタの遮光板を駆動する場合は、Z圧力伝達部2dの下面が駆動点、遮光板が作用点であり、空隙は、Z圧力伝達部2dの下面と遮光板との間に設ければ良い。磁石とホール素子を用いた近接スイッチにおいては、磁石を、Z圧力伝達部2dに取り付ける場合と、Z圧力伝達部2dが空隙を介して磁石を駆動する場合とがあり、遮光板と同様の考え方を適用できる。また、駆動点、作用点は、力、圧力が直接作用する以外に、位置の変化である変位の形で駆動して、光の強さ、磁界の強さなどに作用を及ぼすことも含む概念である。光の強さ、磁界の強さなどが変化を受けることも、X軸、Y軸、Z軸などの力が加わるという概念に含める。あるいは、操作ボタン2に対する圧力が、変位の形で、光の強さ、磁界の強さに対して伝わると考えても良い。また、磁石の磁力という力が、センサであるホール素子に加わるともいえる。光インタラプタでは、遮光板の遮光力という力が、発光ダイオードと受光素子の間の光線に加わるともいえる。遮光力とは、遮光板が光を遮断する程度を表し、完全な不透明板では遮光力が大きく、半透明板では、社効力が弱く、遮光板が光線をより大きく遮るほど、遮光力は大きい。このように、どのようなセンサを使用しても、力が加わるセンサの作用点と、作用点に力を加える駆動点が存在する。
【0078】
本実施の形態の三軸センサ4Bは、足台10の上に取り付けたが、1枚の基板上にX起歪板4x、X起歪板4x、および、Z歪センサ5zまたはZ軸センサを取り付けた一体型の三軸センサとし、基板を足台10に取り付けるようにしてもよい。
(その他の実施の形態および補足)
【0079】
なお、操作ボタン2を操作しない状態では、Xセンサ出力、Yセンサ出力、Zセンサ出力は、いずれも、0Vの電圧であるべきである。しかし、センサの温度特性、経年変化、各起歪板4x、4yなどの変形により、0Vの出力電圧からずれてオフセット電圧となることがある。このような誤差電圧は、X信号増幅部31、Y信号増幅部32、Z信号増幅部34でオフセット調整をすればよい。オフセット調整回路は、演算増幅器の回路では周知である。また、上記不感帯設定部34やZ動作点設定部37は、上記オフセットを除去する作用も有する。情報処理部40に調整モードを設けて、操作ボタン2を操作しない状態でのDsx、Dsy、Dszを誤差分として計測し、Dsx、Dsy、Dszから計測した誤差分を引き算した修正値をDsx、Dsy、Dszとして使用するようにしてもよい。
【0080】
本発明の入力操作装置は、パソコン操作に通常使用しない身体の部分であって、比較的随意動作をしやすい部位として足母指を使用する足指用の入力操作装置である。手と比較すると足の母指の運動機能は不十分で、力の調整能力も低い。本発明では、動作点を移動せず、あるいは、殆ど移動させずに、加える力の変化だけでカーソルやポインタを動かすことができる。通常のマウスのように、手元の移動が不必要であり、キーボード操作などで両手使っている場合、カーソル移動のためにそれらの作業を中断してマウスを操作する必要がなくなる。手が使えない状態でも、身体の一部、例えば足母指などを接触するだけで自由にカーソルやポインタを制御できる。
【0081】
本発明の入力操作装置は、最初に操作ボタン2をZ方向に押し下げ、そのあと、Z方向に力を加えたまま、XY方向へ押すことにより、カーソルやポインタをドラッグする操作も可能にする。これは、操作ボタン2の操作により、Xセンサ出力、Yセンサ出力、Zセンサ出力を選択的に出力させるだけでなく、同時に出力させることも可能にしているからである。
【0082】
操作ボタン2の上面は、真球、楕円球などの球の一部の形状以外でもよく、上に凸の形状で、足の親指が掛けられればよい。操作ボタン2の細部の形状、受圧部3の形状は、上記実施の形態の図面に限らず変更してもよい。図13に示した操作ボタン2の不感帯空隙2x、2yの形状も図13に限らない。
【0083】
本発明に使用する三軸センサのX方向、Y方向、Z方向のセンサを含む各ブロックは、図2の三軸センサ4のように、一体化されていても良いし、図13の三軸センサ4Bのように、3種類のブロック部材が別々でもよい。Z方向のセンサブロックだけが別になっていても良い。
本発明の入力操作装置は、足台10が垂直になるように立てて、肩の付近に設置すれば、肩を操作ボタン2に押し付けて3軸方向に制御することにより、入力操作が可能である。
上記足台10は、足全体が乗せられる形状が最も好ましいが、足の前部半分を乗せるようにしてもよい。
なお、本発明は、以上の各実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0084】
以上のように、本発明にかかる入力操作装置は、繊細な動きが苦手な身体の他の部分を使用して操作可能な入力操作装置であり、身体障害者だけでなく、通常の人も入力操作に活用可能な入力操作装置として利用できる。
【図面の簡単な説明】
【0085】
【図1】本発明の一実施形態による足台形状の入力操作装置の図
【図2】本発明の一実施形態による入力操作装置の操作部の図
【図3】本発明の一実施形態による操作部の分解図
【図4】本発明の一実施形態による入力操作装置の情報処理部の図
【図5】本発明の一実施形態による記憶手段の記憶データの図
【図6】本発明の一実施形態による情報処理部の処理フローチャート
【図7】本発明の一実施形態による情報処理部の処理フローチャート
【図8】本発明の一実施形態による情報処理部の処理フローチャート
【図9】本発明の一実施形態による情報処理部の処理フローチャート
【図10】本発明の一実施形態による情報処理部の信号波形の図
【図11】本発明の一実施形態による他の操作部の図
【図12】本発明の一実施形態による別の操作部の図
【図13】本発明の一実施形態による別の操作部の図
【符号の説明】
【0086】
10 足台
20、20a、20A、20B 操作部
2 操作ボタン
2a Z圧力伝達部
2b 外周部
2x、2y 挿入穴
3 受圧部
3a 内面
3b 枠
3c 下きり欠き部分
3d 穴
4、4A、4B 三軸センサ
4x X起歪板
4y Y起歪板
4z Z起歪板
4c Z起歪板周囲
5x X歪センサ
5y Y歪センサ
5z Z歪センサ
6、7 支持部
31 X信号増幅部
32 Y信号増幅部
33 Z信号増幅部
34 不感帯設定部
35 移動速度設定部
36 ホールド時間設定部
37 Z動作点設定部
40 情報処理部
50 マウス信号変換部
【技術分野】
【0001】
本発明は、足や肩などのように、手以外の体の部位により、パソコンディスプレイ上でマウスが行うと同様のカーソルやポインタ制御を行うことができる入力操作装置に関する。
【背景技術】
【0002】
従来、パソコンディスプレイ上でポインタやカーソルを移動させる入力装置としてマウスが使われているが、作業状況や身体的な障害によって手のひらと指先が使用できない場合、身体の他の部分を使用してマウスと同等の入力操作を行えるようにすることが望まれる。
【0003】
足を使用して入力操作を行うものとしては、スリッパ状の履物の裏側にトラックボールを設け、つま先部に複数のスイッチを設けたものが知られている。この入力装置では、スリッパを足に嵌めて床面を前後左右に移動させることにより、トラックボールを回転させてポインタやカーソル移動を行い、所望の位置において、足の親指などでつま先部のスイッチを操作して、クリック操作を行う入力装置である(特許文献1参照)。
また、下駄の前方半分に相当した板の先端部に2つのスイッチを設けて、一方を親指で、他方を残りの指で操作することにより2通りのクリック操作を行う入力装置がある(特許文献2参照)。
【0004】
また、左足で円盤状の操作板を前後左右の自由な方向に踏み込んで、ポインタやカーソルの移動方向を決定し、右足用の第1のべダルにより、ポインタやカーソルの移動速度を決めて移動させ、右足用の第2のべダルにより、クリック操作を行う入力装置がある(特許文献3参照)。
また、X、Y、Z方向の3軸の触圧を検出するロボット用の触圧センサが知られている(特許文献4参照)。
また、棒状のジョイスティックの周囲に4個の歪ゲージを設置して、棒のX、Y方向の加圧力を検出するジョイスティックが知られている(特許文献5参照)。
また、ジョイスティックを伸縮可能にし、クリック制御に使用するノートパソコン用の小型ジョイスティックが知られている(特許文献6参照)。
【特許文献1】特開2000−181621公報(第1頁、第1図等)
【特許文献2】特開2004−38387号公報(第1頁、第1図等)
【特許文献3】特開平10−55248号公報(第1頁、第1図等)
【特許文献4】特開2004−245717号公報(第1頁、図1、図3等)
【特許文献5】特開平7−302161号公報(第1頁、第1図等)
【特許文献6】特開2000−293305号公報(第1頁、第1図等)
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記の特許文献1や特許文献2のような従来の入力装置では、足先だけでなく、下肢部を前後左右に動かす必要があった。足先だけを動かすことができる肢体不自由者には使えないという課題があった。また、特許文献3のような入力装置では、両足の使用が必要であり、片方の足先だけでの操作は困難であった。片足だけを大きく動かすことなく、カーソルやポインタを制御できる入力操作装置が必要である。
【課題を解決するための手段】
【0006】
本第一の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、足を乗せる足台を具備し、前記三軸センサを前記足台に取り付け、前記足台上に足を乗せたときに親指が乗る位置に設けた前記操作ボタンにより前記三軸センサを駆動して、親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置である。
かかる構成により、肢体不自由者が足で情報処理の操作を行えるようになる。
【0007】
本第二の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、前記操作ボタンが受ける圧力の内、X軸、Y軸の圧力を主として受け、中心部にZ方向に穴が開いた受圧部、を具備し、前記受圧部は、前記三軸センサの前記X軸作用点または作用面と、Y軸作用点または作用面に当接し、前記操作ボタンの下面中心部が前記中心部の穴を介して前記三軸センサの前記Z軸作用点または作用面に当接し、前記受圧部は、前記三軸センサの前記Z軸作用点または作用面に当接しない構造であることを特徴とする入力操作装置である。
【0008】
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。また、かかる構成により、繊細な動きが可能な指先以外の、繊細な動きが苦手な、あるいは、大きく動かすことが困難な、身体の他の部分を使用して操作可能である。
【0009】
本第三の発明の入力操作装置は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が凸を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタン、を具備し、X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置である。
【0010】
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。また、かかる構成により、繊細な動きが可能な指先以外の、繊細な動きが苦手な、あるいは、大きく動かすことが困難な、身体の他の部分を使用して操作可能である。
【0011】
本第四の発明の入力操作装置は、上記第二、第三入力操作装置と、足を乗せる足台を具備し、前記足台上に足を乗せたときに親指が乗る位置に前記入力操作装置を設け、親指で前記操作ボタンをX軸、Y軸、Z軸の3軸の任意の方向に操作する足台状の入力操作装置である。
かかる構成により、肢体不自由者が足などで意図した方向の入力操作を行えるようになる。
【0012】
本第五の発明の入力操作装置は、前記三軸センサのXセンサ出力に基づき表示器上の表示マークの左右方向の移動速度に対応するX速度制御情報を生成し、前記三軸センサのYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報を生成し、前記三軸センサのZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報を生成する情報処理部であって、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるための情報処理部を更に具備する。また、前記Xセンサ出力が所定の大きさ以下の場合、前記X速度制御情報を停止情報とし、前記Yセンサ出力が所定の大きさ以下の場合、前記Y速度制御情報を停止情報とする不感帯領域を設ける。
かかる構成により、肢体を大きく動かすことなく、手を用いるマウスで行うような入力操作を行えるようになる。
【発明の効果】
【0013】
本発明によってキーボードの打鍵やその他の作業で両手がふさがっている時にも、足を使用することによってパソコンのカーソル等を操作することができる。手の指と比較して運動制御機能の劣る足母指や身体の他の部分でも、大きく動かすことなく、X、Y方向のカーソルの移動と、Z方向のクリック操作が行いやすくなる。
【発明を実施するための最良の形態】
【0014】
(実施の形態1)
【0015】
図1は、本発明の入力操作装置の外観図である。足を乗せる足台10の一端に、操作部20が設置される。操作部20は、足を足台10の上に乗せたときの親指の位置に設ける。操作部20は、通常、足の親指である第1指で、または、第1指と第2指で挟んで前後左右に移動または変位可能になっている。また、操作部20は、垂直方向に押し込むことができる。
【0016】
図2は、操作部20の構造の一例を示す図である。図2においては、操作部20の上面図と、A−A'における断面図を示している。操作部20は、球形の一部分の形をした操作ボタン2、操作ボタン2に加わる力を受ける受圧部3、操作ボタン2に加わるX方向、Y方向、Z方向の圧力を検出する三軸センサ4を具備する。図3は、操作部20の操作ボタン2、受圧部3、三軸センサ4を分離して示した分解図である。操作ボタン2の球形部は、足の親指で操作しやすい大きさであることが好適である。具体的には、操作ボタン2の球形部の直径は、15mm以上、30mm以下程度が好ましい。また、操作ボタン2の球形部は、直径約20mm程度であることがさらに好適である。
【0017】
操作ボタン2は、図2、図3に灰色で示した断面を有する回転対称形であり、半球よりやや小さめの球の一部分を成す上部に対して、その下部に円筒形のZ圧力伝達部2aを具備する。この例では操作ボタン2は、茸に似た形状である。操作ボタン2は、ゴムなどの弾性体、適度の硬さを有するプラスチック材料などが適している。
【0018】
受圧部3は、図3に示した斜線ハッチング部分の断面を有する回転対称形の円環である。上部外周には、枠3bを設ける。下部には、内面3aより半径の大きな下切り欠き部分3cを設ける。受圧部3にはZ方向に穴が開いていることになる。なお、内面3aと下切り欠き部分3cの径は、同じでもよいが、受圧部3がずり落ちるのを防ぐために、内面3aの径をやや小さめにしてもよい。
【0019】
三軸センサ4は、図2の平面図に八角形で示したZ起歪板4zの8辺の内、X向きに対向する2辺にL形状の2枚のX起歪板4xを設け、Y向きに対向する2辺にもL形状の2枚のY起歪板4yを設け、X起歪板4x、Y起歪板4y、Z起歪板4zには、歪ゲージ(ストレインゲージ)のようなX歪センサ5x、Y歪センサ5y、Z歪センサ5zをそれぞれ4個ずつ、合計12個貼り付けてある。X起歪板4x、Y起歪板4y、Z起歪板4zは、一枚の金属板をプレス加工などにより一体で形成し、図2、図3の形状に折り曲げて作成することができる。三軸センサ4の上部に相当するZ起歪板4zの形状は、八角形以外、例えば円形等でもよい。このような三軸センサ4は、上記特許文献4により公知であるので、詳しい説明は省く。
【0020】
三軸センサ4は、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知するセンサであって、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する。X軸の力が加わる作用点または作用面は、X起歪板4xの上端部分である。Y軸の力が加わる作用点または作用面は、Y起歪板4yの上端部分である。Z軸の力が加わる作用点または作用面は、三軸センサ4の上面に設けられたZ起歪板4zの中央部分である。なお、Z起歪板4zの周囲側面であって、X起歪板4x、Y起歪板4zがない部分にX、Y方向の力を加えても、X、Y方向の作用が加わるからX方向、Y方向の作用点を兼ねる。しかし、図2の三軸センサ4の場合は、X起歪板4x、Y起歪板4yの上端部分の方が作用点、作用面として優れている。
【0021】
操作ボタン2の外周部2bは、受圧部3の枠3bに嵌め込み固定される。操作ボタン2の外周部2bと受圧部3の枠3bは、接着剤等により結合してもよい。三軸センサ4の上部は、受圧部3の下切り欠き部分3cの中に嵌め込み固定される。最も好ましくは、各2枚のX起歪板4xとY起歪板4yの上部を下切り欠き部分3cにそれぞれ当接させる。Z起歪板4zの周囲部4cを、下きり欠き部分3cと接着剤等により結合してもよい。なお、Z起歪板4zの周辺上面は、受圧部3の下きり欠き部分3cの底に当接しないほうがよいので、下きり欠き部分3cの中に余り深く嵌め込まないようにする。操作ボタン2のZ圧力伝達部2aの下面は、Z起歪板4zの上面中央部に当接する。Z圧力伝達部2aの下面は、Z起歪板4zの上面と接着剤等により接着してもよい。
【0022】
受圧部3は、操作ボタン2が受ける圧力の内、X軸、Y軸の圧力を主として受ける。受圧部3の下切り欠き部分3cの内面は、三軸センサ4の上記X軸作用点(または作用面)と、Y軸作用点(または作用面)に当接する、X駆動点(または駆動面)、および、Y駆動点(または駆動面)になる。操作ボタン2の下面中心部であるZ圧力伝達部2aは、三軸センサ4の上記Z軸作用点(または作用面)に当接するZ駆動点(または駆動面)になる。受圧部3は、三軸センサ4のZ軸作用点(または作用面)には、当接しない構造である。
【0023】
以上の構成による操作部20は、図2の断面図に示したように、足台10に穿った穴の底に設置される。X起歪板4x、Y起歪板4yの下部のL型の足の部分は、足台10に穿った穴の底に螺子止め、または接着止めなどでよい。
【0024】
使用者が、足を足台10に乗せ、足の親指を操作ボタン2の上に当てて、操作ボタン2を左右方向(X方向)に動かそうとして圧力を加えると、X方向の圧力は、2枚のX起歪板4x上の4個のX歪センサ5xにより、Xセンサ出力として計測できる。使用者が、操作ボタン2を前後方向(Y方向)に動かそうとして圧力を加えると、Y方向の圧力は、2枚のY起歪板4y上の4個のY歪センサ5yにより、Yセンサ出力として計測できる。または、使用者が、操作ボタン2を下方向(Z方向)に押さえると、Z方向の圧力は、Z起歪板4z上の4個のZ歪センサ5zにより、Zセンサ出力として計測できる。
各X歪センサ5x、Y歪センサ5y、Z歪センサ5zから、Xセンサ出力、Yセンサ出力、Zセンサ出力を検出する回路は、上記特許文献4の図3、図4などで周知のブリッジ回路などを適用する。
【0025】
本実施の形態における操作部20は、操作ボタン2の外周部2bを、受圧部3の枠3bに当接させている。三軸センサ4の上部は、受圧部3の下切り欠き部分3cの中に嵌め込み固定される。Z起歪板4zの上面周囲は、受圧部3の下きり欠き部分3cの底に当接しない。操作ボタン2のZ圧力伝達部2aの下面は、Z起歪板4zの上面中央部に当接する。このようにすると、操作ボタン2にX方向の圧力を加えた場合、圧力は、主として、受圧部3の枠3bに集中する。枠3bは剛体であるから、X起歪板4の上部に圧力を伝え、X起歪板4の上部は、右方向に変形するが、Z起歪板4zには歪を起こさずZ起歪板4z全体を右に移動させるだけである。従って、X方向の圧力がZ起歪板4z上のZ歪センサ5zに及ぼす力は小さい。足で操作ボタン2にX方向の圧力を加えた場合、操作ボタン2にどうしてもZ方向の力が加わることは避けられないが、Z方向の分力は、受圧部3の枠3の内部の上切欠きの上面が主として受ける。この力は、X起歪板4xに対して垂直にかかるが、Z起歪板4zを変形させるようには働かない。残るZ方向の分力は、Z圧力伝達部2aを介して、Z起歪板4zに対してZ方向に加わるが、その大きさは、軽減される。従って、X方向の操作時に発生するZ方向のクロストークを減らすことができる。
【0026】
操作ボタン2のZ圧力伝達部2aは、Z起歪板4z全体に当接せず、Z起歪板4zの中央部分に主として当接しているので、Z方向の圧力によるZ起歪板4zの変形は大きくなる。よって、足によるZ方向の動作検出の感度を高くすることができる。受圧部3の内面3aとZ圧力伝達部2aの間に空隙を設けているので、受圧部3の力は、Z圧力伝達部2aを介してZ起歪板4zに加わることがない。従って、受圧部3は、専ら、X起歪板4xに歪を発生させるのに寄与できる。なお、以上の説明は、Y方向についても適用できるので、Y方向の操作によるZ方向へのクロストークも軽減できる。
【0027】
次に、Xセンサ出力、Yセンサ出力、Zセンサ出力から、ポインタやカーソルをパソコンディスプレイ上で操作するための情報であるポインタ制御情報を生成する方式について説明する。図4は、ポインタ制御情報を生成する回路のブロック図である。
【0028】
Xセンサ出力は、微小信号であるので、差動増幅器であるX信号増幅部31によりX信号Vxに増幅し、情報処理部40に供給される。Yセンサ出力は、差動増幅器であるY信号増幅部32によりY信号Vyに増幅し、情報処理部40に供給される。Zセンサ出力は、差動増幅器であるZ信号増幅部33によりZ信号Vzに増幅し、情報処理部40に供給される。
不感帯設定部34は、Xセンサ出力、または/およびYセンサ出力、または/およびZセンサ出力が所定以下の場合に、入力がないものとして動作しないような領域である不感帯領域を設定する手段である。
移動速度設定部35は、Xセンサ出力、または/およびYセンサ出力の出力に応じて、カーソルやポインタが移動する速度を設定する手段である。
ホールド時間設定部36は、Zセンサ出力を受け付けない時間を設定する手段である。
Z動作点設定部37は、Z方向の操作によるクリック操作ONの感度を設定する手段である。
【0029】
不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37は、それぞれ可変抵抗器であって、電源電圧を分圧して生成される不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthをそれぞれ情報処理部40に供給する。情報処理部40は、X信号Vx、Y信号Vy、Z信号Vz、不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthを受け入れ、ポインタ制御情報である信号XA、XB、YA、YB、Zを出力する。マウス信号変換部50は、ポインタ制御情報である信号XA、XB、YA、YB、Zを入力とし、パソコンで広く使用されているUSB形式やPS/2形式のシリアル情報のマウス出力信号を出力する機能を有する。マウス出力信号をパソコンに供給すると、パソコンディスプレイ上でカーソルやポインタの操作が行える。なお、信号XA、XBは、後述するX速度制御情報であり、信号YA、YBは、後述するX速度制御情報であり、信号Zは、後述するクリック情報である。
【0030】
情報処理部40において、AD変換手段43は、X信号Vx、Y信号Vy、Z信号Vzを、それぞれ、デジタル値Dsx、Dsy、Dszに変換し、デジタルメモリである記憶手段45に格納する。AD変換手段44は、不感帯設定電圧Vf、移動速度設定電圧Vs、ホールド時間設定電圧Vh、Z動作点設定電圧Vthを、それぞれ、デジタル値F、Ks、Ht、Zthに変換し、記憶手段45に格納する。演算手段46は、上記各デジタル値を記憶手段45から読み出し、後述する演算を行い、演算結果を分周手段47、出力手段48に供給する。クロック信号発生手段41は、情報処理部40の各部にクロック信号を供給する。分周手段47は、演算手段46の演算結果に基づき、クロック周波数を分周して、ポインタ制御情報用の信号XA、XB、YA、YBを発生させ出力する。出力手段48は、演算手段46の演算結果に基づき、後述する信号Zの波形を発生させ出力する。制御部42は、情報処理部40の各部に動作指示などを行う。
【0031】
図5に、記憶手段45の記憶するデータを示す。デジタル値Dsx、Dsy、Dsz、デジタル値F、Ks、Ht、Zthを記憶するエリアに加えて、不感帯処理を行ったX方向のデジタル値Dx、不感帯処理を行ったY方向のデジタル値Dy、Z方向のクリックON/OFFを現すデジタル値Dzを記憶するエリア、および、Dx、Dyに速度係数Ksを乗算した数値の逆数値Kv・DxとKv・Dyを記憶するエリアを設ける。なお、不感帯処理とは、後述する(ステップS12)〜(ステップS15)と(ステップS17)、(ステップS19)による処理のように、入力変数に対する出力変数の関係を、入力変数が所定の領域内(入力の不感帯領域等という)の場合に、出力変数を全くあるいは殆ど変化させず、入力変数が前記所定の領域以下、または所定の領域以上の値の場合に、入力変数に応じて出力変数を変化させる入出力特性にすることを言う。
【0032】
次に、情報処理部40の動作を、図6、図7、図8、図9のフローチャートにより説明する。図6において、情報処理部40に電源が入ると、制御部42は、記憶手段45の図5に示した各エリアのデータを消去する。次に、(ステップS10)において、AD変換手段43は、Vx、Vy、Vzの各信号をAD変換し、変換結果であるデジタル値Dsx、Dsy、Dszを図5に示した記憶手段45の各エリアに記憶する。次に(ステップS11)に進み、AD変換手段44は、Vf、Vs、Vh、Vthの各設定電圧をAD変換し、デジタル値F、Kv、Ht、Zthを図5に示した記憶手段45の各エリアに記憶する。次に(ステップS12)に進み、演算手段46は、DsxとFを読み出し、(ステップS13)において、DsxとFを比較し、Dsx>FがNoの場合、(ステップS14)に進み、Dsxと−Fを比較する。Dsx<−FがNoの場合、(ステップS15)に進み、記憶手段45にDx=0を記憶する。次に(ステップS16)に進み、分周手段47にDx=0を渡し、分周手段47は、ポインタ制御情報用の信号XA、XBのパルス状の交番変化を行なわず、停止情報とする。停止情報とは、それまでの信号XA、XB(1または0)の状態を維持し、交番変化しないことを指す。いいかえると、信号XA、XBは、周波数がゼロであり、カーソルやポインタの移動速度がゼロであることを表す移動速度情報となる。(ステップS13)においてYes(図面における「Y」)の場合は、X歪センサ5xによるデジタル値Dsxが不感帯の値Fより大きい。この場合、(ステップS17)に進み、演算手段46は、Dx=Dsx−Fを算出し、Dxを記憶手段45に記憶し、(ステップS18)に進み、Kv・Dxの逆数値を算出し、記憶手段45の該当するエリアに記憶し、更に分周手段47に供給する。分周手段47は、クロック信号をKv・Dxの逆数値に従って分周して、信号XAと信号XBを出力する。信号XAの位相を信号XBの位相に対して所定の時間またはデューティサイクル分だけ進相信号とする。
【0033】
(ステップS14)においてYesの場合は、X歪センサ5xによるデジタル値Dsxが不感帯の値Fより絶対値が大きい負の値である。この場合、(ステップS19)に進み、演算手段46は、Dx=(Dsx+F)を算出し、Dxを記憶手段45に記憶し、(ステップS20)に進み、Kv・Dxの逆数値を算出し、分周手段47に供給する。分周手段47は、クロック信号をKv・Dxの逆数値の絶対値に従って分周して、信号XAと信号XBを出力する。信号XBの位相を信号XAの位相に対して所定の時間またはデューティサイクル分だけ進相信号とする。
【0034】
(ステップS16)、(ステップS18)(ステップS20)の次に、(ステップS21)に進む。(ステップS22)から(ステップS29)において、演算手段46と分周手段47は、Y歪センサ5yによるデジタル値Dsyと不感帯の値Fに基づき、(ステップS13)から(ステップS20)と同様の処理ステップを実行する。
【0035】
操作ボタン2の操作力が十分に大きくなく、−F<Dsx<F、−F<Dsy<Fの範囲の場合は、Dx=0、Dy=0である。すなわち、X、Y方向に操作の不感帯をもうけていることになる。不感帯とは、小さな入力(力)を検知しても、出力としない領域(力の幅)のことである。
【0036】
(ステップS25)、(ステップS27)(ステップS29)の次に、図7に示す(ステップS30)に進み、演算手段46は、Z方向についての情報処理を行う。まず(ステップS30)において、演算手段46は、記憶手段45からZ歪センサ5zによるデジタル値DszとZ動作点設定値Zthを読み出し、(ステップS31)に進む。(ステップS31)において、Dsz>Zthの場合、Z方向のクリック操作が十分に大きい力であると判定し、(ステップS32)に進み、演算手段46は、Dz=1を記憶手段45に記憶し、出力手段48にDz=1を供給する。(ステップS31)において、No(図面における「N」)の場合、Z方向のクリック操作がないものと判定し、演算手段46は、Dz=0を記憶手段45に記憶し、出力手段48にDz=0を供給する。(ステップS32)、(ステップS33)の処理後は、(ステップS10)に戻る。
【0037】
図8は、分周手段47が行う処理の手順のフローチャートである。(ステップS40)において、分周手段47は、Dxを読み出し、Dx=0かどうか判定する。Dx=1の場合、判定はNoであり、(ステップS41)に進み、記憶手段45からKv・Dxの逆数値を読み出し、その絶対値(正数)に比例した2進数CxをXカウンタにセットし、0に向けて、クロック信号発生手段41が生成するクロック信号に従って、計数を開始する。なお、分周手段47は、Xカウンタを具備する。Xカウンタは、クロック信号を計数するX軸用のカウンタで、信号XA、XBを生成するために使用する。Xカウンタは、周知のバイナリカウンタであって、ハードウェアにより構成できる。Xカウンタは、周知のフリップフロップを複数個従続接続し、クロック信号を各フリップフロップにより順次分周する構成であって、任意の2進数の各ビットを各フリップフロップに書き込むと、これらのフリップフロップにより構成されるレジスタは、その値をクロック信号に同期して、1ずつ減算し、かつ、各フリップフロップの出力をレジスタの値として読み出すことが出来る機能を有するデジタル回路である。次に、(ステップS42)に進み、Xカウンタ=0になるまでループし、Xカウンタ=0になるとYesになり、(ステップS43)に進む。(ステップS43)において、分周手段47は、記憶手段45からDxを読み出し、Dxの正負を判定する。Dxが正の場合、Yesであり、(ステップS44)に進む。(ステップS44)において、分周手段47は、信号XAを前の値から反転して出力する。すなわち、信号Xの値が0の場合、1とし、前の値が1の場合、0とする。次に(ステップS45)に進み、所定の時間ΔT待って、信号XBを前の値から反転して出力し、(ステップS40)に戻る。(ステップS43)において、Dxが負の場合、Noであり、(ステップS46)に進む。(ステップS46)において、分周手段47は、信号XBを前の値から反転して出力する。次に(ステップS47)に進み、所定の時間ΔT待って、信号XAを前の値から反転して出力し、(ステップS40)に戻る。(ステップS40)においてYesの場合、Dx=0、すなわち、X方向の操作による圧力が十分に小さい場合であって、(ステップS48)に進み、分周手段47は、信号XA、XB共に、それまでの出力レベルを維持し、(ステップS40)に戻る。(ステップS40)から(ステップS48)の一連の処理は、図6の(ステップS16)、(ステップS18)、(ステップS20)における分周手段47の行う処理に該当する。
【0038】
(ステップS44)、(ステップS45)、(ステップS46)、(ステップS47)により分周手段47が出力する信号XA、XBは、図10に示すような交番パルス信号になる。信号XA、XBの周期は、Kv・Dxの逆数値をXカウンタが計数する時間をTxとすると、2(Tx+ΔT)になる。信号XA、XBの周波数は、1/〔2(Tx+ΔT)〕になる。操作ボタン2をX方向に強く押すと、Dxは大きく、Txは小さくなり、周波数は高くなる。操作ボタン2をX方向に弱く押すと、Dxは小さく、Txは大きくなり、周波数は低くなる。図10の(1)X右方向では、信号XAが信号XBよりΔTだけ位相が進んだ信号とする。(2)X左方向では、信号XBが信号XAよりΔTだけ位相が進んだ信号とする。信号XAとXBのどちらの位相が進んでいるかを判定すれば、カーソルやポインタを左右どちらに移動させるかを決めることが可能になる。
【0039】
分周手段47は、Y方向のデジタル値Dyに対しても、図8において説明したと同様の処理手順により、記憶手段45からKv・Dyの逆数値を読み出し、その絶対値に対応する2進数CyをYカウンタにセットし、0に向けて計数を行い、信号YAと信号YBを出力する。Yカウンタは、上記Xカウンタと同様のデジタル回路により構成できる。信号YAと信号YBも、図10の信号XAと信号XBのようにΔTだけ位相差がある信号になり、信号YAとYBのどちらの位相が進んでいるかを判定すれば、カーソルやポインタをディスプレイ上の上下どちらに移動させるかを決めることが可能になる。
【0040】
なお、Xカウンタにセットする2進数Cx、すなわち、Kv・Dxの逆数値の絶対値に比例した2進数の数値の範囲は、次のようなものとする。信号XA、XBの周波数=1/〔2(Tx+ΔT)〕の範囲が、広く用いられている周知の手動マウスが内蔵するエンコーダから出力されるエンコーダ信号の周波数範囲になるような2進数値であればよい。すなわち、Kv・Dxの逆数値の絶対値からXカウンタ用の上記2進数Cxに変換する際に、上記周波数範囲を満足させる一定の係数を乗算するか、ビットシフトを行えばよい。また、逆数演算は、データ処理が複雑であるので、Kv・Dxの値を入力とし、(Kv・Dx)・Cx=一定値となるような2進数Cxを対応させた数値変換テーブルをROMとして記憶手段45内部に設けておいてもよい。演算手段46は、Kv・Dxの逆数値を演算の代りに、Kv・Dxを演算して分周手段47に供給し、分周手段47は、受け取ったKv・Dxの値を元に、上記数値変換テーブルを参照して、Xカウンタ用の2進数Cxを獲得することができる。これらの処理方法は、信号YA、YBに対しても適用できる。また、演算手段46が、上記数値変換テーブルを参照して、Xカウンタ用、Yカウンタ用の2進数Cx、Cyを獲得し、2進数Cx、Cyを分周手段47に供給するようにしてもよい。この場合は、記憶手段45には、図5におけるKv・Dxの逆数値とKv・Dxの逆数値の記憶エリアは不要になる。逆数演算の計算精度は、それほど必要ではない。従って、近似多項式による近似演算で十分である。数値変換テーブルの場合も、比較的小さなテーブルで十分である。
【0041】
上記説明では、図10に示した信号XAと信号XBの位相差は、その周波数が変わっても、時間差ΔT一定になる。その代わりに、信号XA、XBの位相差が一定になるようにしてもよい。このためには、2進数Cxの代りにCx/2をXカウンタにセットして、クロック信号を目標周波数の2倍の周波数にまず分周し、更に2分周する2段階の分周を行うようにし、2分周する際に、信号XAの反転時刻と信号XBの反転時刻が位相で90度の関係になるようにすればよい。また、上記、目標周波数の2倍の周波数にまず分周して生成したパルス信号を基にし、これを2分周する際に、位相0度の信号と90度位相が遅れた信号を生成しておき、(ステップS18)では、前者を信号XA、後者をXBとして出力し、(ステップS20)では、前者を信号XB、後者をXAとして出力するようにしてもよい。
【0042】
また、1チップマイコンなどで内蔵されている16ビットタイマー、8ビットタイマーなどのタイマーを利用して、信号XAと信号XBを生成してもよい。これらのタイマーは、任意の2進数を書き込むと、その数値を1チップマイコン内部の決められたクロック周波数に従って1ずつ数値を増加させ、全ビットが1または0になると、所定のプログラムに割り込みを発生させる機能を、一般的に有する。この機能を適用する場合について説明する。分周手段47は、タイマー割り込みにより起動されるプログラムにより信号XA、XBを生成する。信号XA、XB生成用のプログラムは、図8のフローチャートの代りに、以下の手順の流れとする。すなわち、(ステップS61)は、割り込み待ちのステップ、(ステップS62)は、割込み発生のたびに、2ビットの情報[AB]=[10]、[11]、[01]、[00]の4つのパターンを順番に切り替えて生成するステップ、(ステップS63)は、タイマーに上記2進数Cx/2の2の補数をセットしてカウントを開始させるステップ、(ステップS64)は、割り込み待ち状態に戻るステップであって、これら(ステップS61)〜(ステップS64)をループ状に構成する。タイマーに2進数Cx/2の2の補数がセットされ、カウントアップが完了して割り込みが発生すると、割り込みは、上記の信号XA、XB用のプログラム(ステップS61)〜(ステップS64)を起動する。上記プログラム処理は、割り込みのたびに、(ステップS63)において、タイマーに2進数Cx/2の2の補数をセットする。従って、タイマーは、2進数Cx/2個のクロック信号計数周期で、割り込み発生を繰り返すことになる。従って、[AB]は、[10]、[11]、[01]、[00]のパターンを繰り返すことになる。[AB]のパターンにより信号を作ると、[AB]の上位ビットAによる信号は、信号XAの交番信号波形になり、下位ビットBは、信号XAの波形より位相が90度遅れた信号XBの交番信号波形になる。信号XAの位相を信号XBの位相より90度遅らせる場合は、逆の順序、[AB]=[00]、[01]、[11]、[10]の順で4つのパターンを変化させれば良い。上記(ステップS62)のステップにおいて、Dxの正負判定を行い、その結果により[AB]の変化の順序を選択する。なお、Dx=0の場合には、信号XA、XBを変化させない停止情報にする必要があるが、上記割込みを受け付けない割込み禁止状態にすれば、[AB]は変化せず、信号XA、XBも、変化しない停止情報になる。上記[AB]=[10]、[11]、[01]、[00]のパターンは、記憶手段45に格納しておき、上記(ステップS62)のステップにおいて、プログラムにより記憶手段45から順番に読み出すようにすれば良い。読み出した[AB]は、信号XA、XBとして出力される。なお、この方式では、図6のフローチャートの(ステップS18)、(ステップS20)において、上記(ステップS61)〜(ステップS64)の割り込み処理を有効化(エネーブル)し、割り込みを起動させる手順に変更する。また、(ステップS16)においては、上記(ステップS61)〜(ステップS64)の割り込み処理の起動を無効化(ディスエーブル)する処理に変更する。なお、信号YA、YBについては、別のタイマーを使用して、上記信号XA、XBと同様の方法で生成することが出来る。
【0043】
図10の信号XA、XBでは、操作ボタン2を右方向に押した場合、信号XAの位相が信号XBに対して進み、カーソルやポインタをディスプレイ上でX右方向に移動するものとした。操作ボタン2を右方向に押した場合、逆に信号XBの位相が信号XAに対して進んでいる信号を生成し、マウス信号変換部50において、USBやPS/2のマウス出力信号に変換する際に、カーソルやポインタをディスプレイ上でX右方向に移動させるマウス出力信号を生成するようにしてもよい。
【0044】
図9に、出力手段48が行う信号Zの生成、出力処理の手順のフローチャートを示す。情報処理部40に電源が入ると、(ステップS50)において、出力手段48は、Z=0を信号Zとして出力する。次に、(ステップS51)に進み、出力手段48は、記憶手段45のDzを読み出すか、演算手段46から受け取ったDzを使用して、Dz=1か否かを判定する。Dz=0の場合、Noであり、(ステップS51)を繰り返す。Dz=1になると、操作ボタン2がZ方向に強く押されたことを示す状態であり、判定はYesである。(ステップS52)に進み、出力手段48は、信号Z=1を出力する。次に(ステップS53)に進み、Zカウンタにホールド時間設定のデジタル値Htをセットし、0に向けて減算計数を行い、Zカウンタが0になるまで待つ。Zカウンタは、上記Xカウンタと同様のデジタル回路により構成できる。なお、Zカウンタは、1チップマイコンのタイマーを使用しても実現できる。Zカウンタが0になるまでの間は、信号Z=1が続くことになる。次に(ステップS54)に進み、Dz=0か否かを判定する。Dz=0であれば、操作ボタン2のZ方向の操作が終わっていることを示している。Dz=0の場合はYesであり、(ステップS55)に進み、出力手段48は、信号Zを1から0に変更して出力する。Dz=1の場合は、操作ボタン2がZ方向に操作され続けていることを示す。(ステップS56)に進み、出力手段48は、演算手段46から供給されるDzが0になるまで、(ステップS56)を繰り返し、Dz=0になると(ステップS55)に進み、出力手段48は、信号Zを1から0に変更して出力する。(ステップS55)の後は、(ステップS51)に戻り、Dz=1になるのを待つ。図9のような処理により、Z方向の加圧時間が短時間であっても、ホールド時間のデジタル値Htによって決まるパルス幅以上のパルスが、Z信号として出力される。図10の(3)Z方向にDsz、Dz、信号Zの波形の例を示す。DszがZthを越えるまでは、Dz=0で、信号Zが出ないので、Dsz=0〜Zthは、Z方向に対する不感帯になる。
【0045】
上記のような処理により、本発明の入力操作装置では、X、Y方向に操作ボタン2を押さえると、信号XA、XB、YA、YBが交番パルス信号として出力される。操作ボタン2を強く押さえると、図10に示した交番パルス信号XA、XB(YA、YBも同様)の周波数が高くなる。この出力信号は、周知の手動マウスに内蔵された回転式のエンコーダが生成する信号と同じ形式の信号である。時間当たりのパルス数が多いほど、マウスの移動が早く、カーソルやポインタの移動速度が大きくなる。信号XA、XB、YA、YBをパソコンのPS/2方式のマウスのシリアル出力信号に変換すれば、パソコンディスプレイ上でカーソルやポインタを左右上下に移動可能になる。従って、マウスを移動させる速度によりカーソルやポインタの移動速度を制御するのと同様の使い勝手が得られることになる。また、Z方向の圧力印加は、マウスの左クリックと同様の作用を行わせることに対応させることができる。
【0046】
上記、信号XA、XBは、三軸センサ4のXセンサ出力に基づき、パソコンやPDAやナビゲーションシステム等のディスプレイなどの表示器上のカーソルやポインタなどの表示マークの左右方向の移動速度に対応するX速度制御情報であり、信号YA、YBは、三軸センサ4のYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報である。信号Zは、三軸センサ4のZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報である。情報処理部4は、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるためのX速度制御情報、Y速度制御情報、クリック制御情報を生成する。
【0047】
図4におけるマウス信号変換部50は、信号XA、XB、YA、YB、Zを入力とし、パソコンで広く使用されているUSB形式やPS/2形式のマウス出力信号を出力する機能を有する。このようなマウス信号変換部50は、マウスコントローラと呼ばれ、専用の集積回路が知られているので、それらを使用すればよい。例えば、台湾の半導体メーカであるElan Microelectronics Corporation(義隆電子、以下ELAN)製の集積回路EM84502Aは、PS/2形式のマウス出力信号を出力する。USB形式やPS/2形式のマウス出力信号は、現在多用されており、周知の情報形式であるので、説明を省く。USB形式やPS/2形式のマウス出力信号は、X速度制御情報、Y速度制御情報、クリック制御情報を含んだ信号である。従って、情報処理部40は、マウス信号変換部50を含む概念としてもよい。また、パソコンなどにおいて、カーソルやポインタをパソコンディスプレイ上に表示し、マウス出力信号に基づき、カーソルやポインタの位置を制御し、移動速度を制御することは、広く行われており、その方法や構成は周知であるので、説明を省く。
【0048】
シリアルマウス出力信号としては、信号XA、XB、YA、YB、Zを適当なサンプリング周波数でサンプルし、その時点での「1」か「0」で表される5ビットの(XA、XB、YA、YB、Z)コードを同期符号か同期信号パターンを付加した直列のコード列として送信する形式が考えられる。しかしこれは、情報としては、信号XA、XB、YA、YB、Zを送信するのと等価といえる。USB形式やPS/2形式のマウス出力信号も、信号XA、XB、YA、YB、Zを送信するのと、情報としては等価といえる。
【0049】
次に、不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37の目的、意義について説明する。X信号増幅部31のX信号Vxは、操作ボタン2を操作しない状態でも、温度、経年変化などにより、0Vから多少ずれる。また、操作ボタン2をZ方向に押さえた場合でも、X方向にも多少の力が加わる場合がある。X信号Vxの小さな値は無視して、信号XA、XBが変化しない停止情報とし、不感帯以上の大きな圧力が加わった場合に、X方向の操作が行われたものとして、交番パルス状の信号XA、XBを出力する。Y方向についても、同様に、不感帯を設けている。操作ボタン2をZ方向に押したときに、カーソルやポインタのディスプレイ上での意図しない移動を防止できる。
【0050】
移動速度設定電圧Vsは、同じ圧力を操作ボタン2に加えている場合でも、カーソルやポインタのディスプレイ上での移動速度を変更する機能を有する。信号XA、XB、YA、YBの周波数は、移動速度設定電圧Vsに従って変更できるからである。カーソルやポインタのディスプレイ上での移動速度を好みに応じて変更できる。また、足に力には、かなりの個人差があるものと推定されるので、個人差を移動速度設定電圧Vsによって補償することにより、どのような人でも、カーソルやポインタのディスプレイ上での移動速度を同じ程度に設定することが可能になる。
ホールド時間設定部36のホールド時間設定電圧Vhを調節することにより、Z方向の操作が短時間の場合にも、必要なパルス幅のZ信号を得ることができる。
【0051】
Z動作点設定部37のZ動作点設定電圧Vthは、Z方向の操作によるクリック操作ONの感度を変更する機能を有する。Z動作点設定電圧Vthを小さくすると、Z方向の弱い操作でもZ信号を発生させて、Z方向のクリック操作ONにできる反面、操作ボタン2をX、Y方向に操作したときに発生するZ方向のクロストークに反応して、誤って、Z方向のクリックONにしてしまう恐れがある。一方、Z動作点設定電圧Vthを大きくすると、操作ボタン2をZ方向に強く押さないとZ方向のクリックONにならないので、足の力が弱い人には使いづらくなる。Z動作点設定部37により、使いやすいZ動作点の設定が可能になる。Z動作点設定電圧Vthやデジタル値Zthは、Z方向の不感帯に相当することになる。
【0052】
上記説明では、操作ボタン2を操作しない状態でのX信号増幅部31、Y信号増幅部32、Z信号増幅部33の各出力信号、X信号Vx、Y信号Vy、Z信号Vzの電圧値は、それぞれ、0V(ボルト)とし、操作ボタン2を右方向に押した場合、X信号Vxは正電圧となり、左方向の場合、負電圧になり、操作ボタン2を前方方向に押した場合、Y信号Vyは正電圧となり、手前の方向の場合、負電圧になり、正負の電圧、例えば、0V〜±5Vが出力されるものとした。また、Dsx、Dsyは、符号付の2進数であるものとして説明した。しかし、各信号増幅部に5V単電源の回路を使用し、また、負数を2の補数で表す表現など、他の2進数表現を適用しても、上記の各動作を実現できることは言うまでもない。
【0053】
次に、実際に試作した入力操作装置について、その特性を簡単に説明する。操作部20の操作ボタン2のX方向、またはY方向に5kgfの力を加えたときの、X歪センサ5x、Y歪センサ5yに発生する歪は、約1000με(ストレイン)であり、このときのX信号増幅部31、Y信号増幅部32の出力電圧は、±6V程度であった。またはZ方向に10kgfの力を加えたときの、Z歪センサ5zに発生する歪は、約350με(ストレイン)であり、このときのZ信号増幅部33の出力電圧は、+3V程度であった。AD変換手段43は、入力電圧±5Vに対応し、10ビットの出力で、−511〜0〜+512の範囲を表せる。不感帯設定電圧Vfによる不感帯デジタル値Fは、一例として約40程度である。
ホールド時間設定用のデジタル値Htは、クロック信号発生手段41のクロック信号周波数が1kHzの場合、10進数で150〜200、すなわち、150〜200m秒程度が適当であったが、これには限らない。
【0054】
情報処理部40のAD変換手段43、44、Xカウンタ、Yカウンタ、Zカウンタを除く部分は、通常、MPUやメモリ等から実現され得る。AD変換器、複数のカウンタまたはタイマー、クロックジェネレータなどを内蔵している1チップマイコンを使用しても良い。上記図6から図9において説明した処理手順は、通常、ソフトウェアで実現される。当該ソフトウェアは、制御部42内に設けたROM等の記録媒体に記録しておき、制御部42が読み出して、プログラムを実行する。図8の分周手段47の処理手順、図9の出力手段48の処理手順は、時間情報を扱うので、図6、図7における分周手段47、出力手段48以外の処理手順とは別々に処理するのが、プログラム作成上簡単である。このためには、信号XAとXBの生成手順、信号YAとYBの生成手順、信号Zの生成手順、および、それ以外の処理手順の4つのプログラムを並列で処理するマルチタスクの実行ができるプロセッサを使用すればよい。マルチタスクプロセッサを使用しない場合は、Xカウンタ、Yカウンタ、Zカウンタによる割込み処理を適用してもよい。また、分周手段47、出力手段48など情報処理部40の一部分、あるいは、情報処理部40全体をハードウェア(専用回路)で実現しても良い。
【0055】
記憶手段45は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。不感帯設定部34、移動速度設定部35、ホールド時間設定部36、Z動作点設定部37は、デジタル値を直接情報処理部40にパソコンなどにより供給するようにしてもよい。その場合、テンキーやキーボードやマウスやパソコンのメニュー画面によって、デジタル値F、Ks、Ht、Zthを設定することが可能である。
なお、図6から図9のフローチャートにおいて、処理プログラムを電源オフや処理終了の割り込みにより処理終了させてもよい。
【0056】
なお、Xセンサ出力、Yセンサ出力、Zセンサ出力は、微小であるので、ノイズが重畳しやすい。X信号増幅部31、Y信号増幅部32、Z信号増幅部33に高周波除去のフィルタ特性を持たせて、ノイズ除去を行ってもよい。AD変換手段43、44の出力データを時間的に平均してノイズを除去してもよい。情報処理部40にデジタルフィルタを設けてノイズ除去してもよい。また、上記不感帯は、ノイズの影響を除去する機能を有する。
【0057】
上記説明では、不感帯設定部34による不感帯設定電圧Vfに対して、デジタル処理によりX信号Vx、Y信号Vyに不感帯を付与した。X信号増幅部31、Y信号増幅部32を不感帯つきの演算増幅回路としてもよい。
【0058】
ノイズの除去や操作ボタン2の微小な動きなどにより、チャタリングのような信号が出る場合、X信号Vx、Y信号Vy、Z信号Vzに関しヒステリシス特性を付加してもよい。ヒステリシス回路も、演算増幅器を用いた回路により作成できる。あるいは、図7のフローチャートにおいて、DszがZthを超えてDz=1としても、一定量以上変化してZth以下にならない場合、Dz=1のままとする処理を加えれば、プログラム処理によりヒステリシス特性を実現できる。
【0059】
Z方向のクリックONの動作時に、カーソルやポインタがX、Y方向に意図しない移動をしないように、ZカウンタのHt計数中は、信号XA、XB、YA、YBの出力をそれまでと同じ0または1に維持する停止情報状態とすれば、カーソルやポインタは、ホールド時間中は上下左右に移動しないようにできる。図9の(ステップS53)を実行中は、信号XA、XB、YA、YBを変化させない停止情報とする手順を、図8のフローチャートの(ステップS45)、(ステップS47)の次に追加すればよい。
【0060】
本実施の形態のように、三軸センサ4のX、Y、Z軸のX歪センサ5x、Y歪センサ5y、Z歪センサ5zが、一体化されたX起歪板4x、Y起歪板4y、Z起歪板4zに設置されている場合、製造寸法誤差などがあると、Xセンサ出力、Yセンサ出力、Zセンサ出力の間にクロストークが発生する恐れがある。また、使用者は、操作ボタン2に正確に、X方向のみ、Y方向のみ、Z方向のみの圧力を加えることは、足などの場合、一般的に容易ではない。操作ボタン2の操作において、操作意図に相違して、他方向成分が混じるクロストーク成分が発生しがちである。本実施の形態では、そのようなクロストークの影響を、受圧部3や不感帯により軽減することが可能になる。特に肢体不自由などの身体障害者の場合、操作ボタン2をX、Y、Z方向に正確に操作することは容易ではないので、本発明は、身体障害者が足で入力操作を行うことを容易にする効果がある。
【0061】
なお、上記説明では、三軸センサ4のZ起歪板4zの中央部の作用面とZ圧力伝達部2a下面の駆動面が当接するものとしたが、空隙を隔てて互いに当接可能に対向する位置とし、Z方向の操作により、対向位置から互いに当接してZ圧力伝達部2aがZ起歪板4zを押し下げる構造にしてもよい。この場合、操作ボタン2の少なくとも上部や外周部分は弾性材料とし、操作ボタン2を押し下げたときに、Z圧力伝達部2aが、受圧部3の位置を基準として、押し下げられるようにしなければならないことは言うまでもない。
なお、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るので、三軸センサ4自体によるクロストークの発生を少なく出来る。
【0062】
なお、本実施の形態における入力操作装置は、足、特に足の親指、以外の部位を使用しても操作され得る。つまり、本入力操作装置は、繊細な動きが可能な指先以外の、繊細な動きが苦手な身体の他の部分を使用して操作可能である。
(実施の形態2)
【0063】
図11は、三軸センサ4の上面に位置するZ起歪板4zの形状を変更した三軸センサ4Aを用いた操作部20aの例である。図2の三軸センサ4のZ起歪板4zは、平面形状であった。本実施の形態におけるZ起歪板4zは、図11に示すように、上に凸の形状とする。このようにすると、Z起歪板4zにXY方向の力が働いた場合、Z起歪板4zは、上向きに変形しようとする。XY方向の操作に伴ってZ方向(下向き)の分力がZ圧力伝達部2aに掛かっても、上記上向きの変形と打ち消しあい、Z起歪板4zのZ方向(下向き)の歪は、全く、あるいは、殆ど発生しない。操作ボタン2をZ方向に押し下げると、Z起歪板4zは下向きに変形し、Xセンサ出力が発生する。図11の平面図のZ起歪板4z(破線)に示すように、Z起歪板4zの平面形状を十字型に近づけると、Z起歪板4zを下向きに変形し易くできる。
本実施の形態によれば、XY方向の操作によるZ方向へのクロストークが少なくなり、意図しないZ方向のクリックの発生が防止できる。
なお、X、Y、Zセンサ出力の処理は、実施の形態1と同様でよい。
【0064】
なお、上記説明では、三軸センサ4のZ起歪板4zの中央部の作用面とZ圧力伝達部2a下面の駆動面が当接するものとしたが、空隙を隔てて互いに対向する位置とし、Z方向の操作により、互いに当接してZ圧力伝達部2aがZ起歪板4zを押し下げる構造にしてもよい。この場合、操作ボタン2の少なくとも上部や外周部分は弾性材料とし、操作ボタン2を押し下げたときに、Z圧力伝達部2aが、受圧部3の位置を基準として、押し下げられるようにしなければならないことは言うまでもない。
なお、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るのでクロストークの発生を少なく出来る。角の部分の幅を減らしても同様の効果が得られる。
(実施の形態3)
次に、クロストークを防止する不感帯を、機構的に実現した本発明の入力操作装置を、図12により説明する。
【0065】
本実施の形態の操作部20Aにおいて、三軸センサ4Aは、実施の形態2において説明した三軸センサと同様である。なお、実施の形態1において説明した三軸センサ4でもよい。操作ボタン2は、実施の形態1において説明したとほぼ同様の構造である。Z圧力伝達部2aは、あってもなくてもよいが、図2の場合より短くしてある。受圧部3は、円盤の中心部に穴3dを空けた単純な構造でよい。受圧部3は、指示部6により支えられる。支持部6は、ゴム、ウレタン樹脂などの弾性材料で作ったもので、円形体の中心部が空いた形状である。なお、支持部6は、1つまたは複数個のばね、ばね材で作った支持体でもよい。なお、図12の平面図においては、支持部6を示す円を省いて描いてある。
【0066】
受圧部3の穴3dの内面は、三軸センサ4Aの外周より大きくする。従って、足を乗せただけの状態では、穴3dの内面は、三軸センサ4AのX軸、Y軸作用点または作用面であるX起歪板4x、Y起歪板4yの上部とは当接せず、X軸、Y軸駆動点と、X軸、Y軸作用点または作用面との間には、不感帯空隙ができる。操作ボタン2のZ圧力伝達部2aの下面は、Z駆動点であるが、Z軸作用点であるZ起歪板4zの中央部とは当接せず、不感帯空隙ができる。従って、操作ボタン2に意図しない方向の外力が少しだけ加わった場合には、各駆動点が、対応する各作用点または作用面に当接しないので、X、Y、Z各センサ出力は静止状態と変わらない。すなわち、クロストーク出力の発生が防止できる。
【0067】
なお、操作ボタン2は、実施の形態1と同様弾性体で作成してもよい。受圧部3は、金属、プラスチックス材料などが使用できる。また、操作ボタン2と受圧部3を一体として同じ材料で作成してもよい。上記駆動点と作用点または作用面との位置関係を上記不感帯空隙ができるようにする限り、操作ボタン2と受圧部3の形状は、変更してもよい。
【0068】
本実施の形態は、X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知して、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が、球の一部を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタンを具備し、X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設けて、バックラッシュが起きるように結合し、Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置である。ここでのバックラッシュは、操作ボタン2が、XまたはY方向の中心位置の近くを前後左右に移動する際に、操作ボタン2の駆動力が三軸センサ4Aの作用点に働かないことにより起きる遊びと看做せる。
【0069】
なお、Z起歪板4zは、三軸センサ4の場合と同様、平面としてもよいことは言うまでもない。また、X起歪板4x、Y起歪板4yとZ起歪板4zとが結合されている角の部分の厚さを減らせば、互いの干渉が減るのでクロストークの発生を少なくできる。角の部分の幅を減らしても同様の効果が得られる。
なお、本操作部20AのX、Y、Zセンサ出力の処理は、実施の形態1と同様でよい。
(実施の形態4)
【0070】
図13は、操作ボタン2の操作力が、X方向、Y方向、Z方向の歪センサに伝わる途中に、機械的な不感帯を設けた操作部20Bの実施の形態である。本実施の形態の三軸センサ4Bは、L形状のX起歪板4xをX方向に対向するように2枚設け、L形状のY起歪板4yをY方向に対向するように2枚設けられる。2枚のX起歪板4xには、X歪センサ5xが2個ずつ貼り付けられている。2枚のY起歪板4yには、Y歪センサ5yが2個ずつ貼り付けられている。4枚の起歪板は、足台10の底に固定される。Z歪センサ5zを4枚の起歪板の中央部、足台10の底に設置する。操作ボタン2は、半球形の上部を有し、下部に中心軸2dが設けられる。中心軸2は、Z圧力伝達部2dである。半球形の上部の下面には、X起歪板4xの上端部を挿入する挿入穴2xが2個、Y起歪板4yの上端部を挿入する挿入穴2yが2個、それぞれ、開けられている。ゴム、ウレタン樹脂などの弾性材料で作ったチューブ状の支持部7は、足台10の底に固定される。支持部7には操作ボタン2のZ圧力伝達部2dが挿入されている。歪センサ5zとZ圧力伝達部2dの間には、不感帯空隙2zが設けられる。X起歪板4x、Y起歪板4yの上端部は、挿入穴2x、2yに挿入されている。操作ボタン2が外力を受けない状態では、操作ボタン2は、支持部7により直立する。
【0071】
X起歪板4xの上先端部は、X歪センサ5xに歪を与える作用点であるのでX作用点と呼ぶ。Y起歪板4yの上先端部は、Y歪センサ5yに歪を与える作用点であるのでY作用点と呼ぶ。挿入穴2xは、X作用点にX方向操作力を加えるので、X駆動点と呼ぶ。挿入穴2yは、Y作用点にY方向操作力を加えるので、Y駆動点と呼ぶ。操作ボタン2が操作されない状態では、X起歪板4x、Y起歪板4yの上端部は、挿入穴2x、挿入穴2yのほぼ中央位置に位置し、X起歪板4xの上端部と挿入穴2xは当接せず、Y起歪板4yの上端部と挿入穴2yは当接せず、離れている。挿入穴2x、挿入穴2yは、不感帯の作用をするので、これらの隙間は、不感帯空隙2x、不感帯空隙2yとも呼べる。これらは、バックラッシュに相当する。
【0072】
操作ボタン2にX方向の圧力をかけるとX駆動点はX方向に動くが、不感帯空隙2xのために、最初は、X駆動点がX作用点に作用しない。更に圧力をかけると、X駆動点がX作用点に当接し、X起歪板4xが曲がり、X歪センサ5xより、Xセンサ出力が得られる。Y方向についても同様である。操作ボタン2をXYの斜め方向に操作した場合は、その方向角度に応じた圧力が、X方向とY方向に分圧されて、X作用点とY作用点にかかり、方向角度に応じたXセンサ出力とYセンサ出力が得られる。操作ボタン2に加える圧力方向をX方向からY方向へ徐々に変化させた場合も、連続的にXセンサ出力、Yセンサ出力が変化し、かつ、操作ボタン2から足指への反発力も連続的に変化し、操作感がよい。
【0073】
操作ボタン2をZ方向に押し下げた場合、不感帯空隙2zがZ圧力伝達部2dと歪センサ5zの間に設けられているので、小さい力では、歪センサ5zはZセンサ出力を出さない。操作ボタン2が、不感帯空隙2zを越えて押し下げられた場合、歪センサ5zに押圧力が加わり、歪センサ5zはZセンサ出力を出力する。Z圧力伝達部2dの下面は、Z駆動点であり、歪センサ5zの上面がZ作用点になる。
【0074】
従って、操作ボタン2をXY方向に操作したときに少々Z方向の力が働いても、不感帯空隙2zがあるため、Z方向のクロストークは発生しない。また、操作ボタン2をZ方向に押し下げた場合、少し斜めに押し下げても、不感帯空隙2x、2yがあるため、X駆動点はX作用点に、Y駆動点はY作用点に、それぞれ作用せず、ZからXYへのクロストークは発生しにくくなる。また、駆動点が作用点に当接する際に、クリック感が発生し、操作の制御がやりやすい。クリック間が不要の場合は、各空隙に粘性体を充填してもよい。
【0075】
本実施の形態では、X歪センサ5x、Y歪センサ5y、Z歪センサ5z相互は、機構的に分離されているので、三軸センサ4B自体においては、クロストークは発生しない。操作ボタン2の操作においては、操作力自体に、意図しない方向の操作力がクロストークの形で含まれるが、本実施の形態の操作部20Bでは、その影響を軽減できる。
【0076】
X歪センサ5x、Y歪センサ5y、Z歪センサ5zの出力を、信号XA、XB、YA、YB、Zに変換する方法は、上記実施の形態1において図4から図10により説明したのと同様の方法でよい。なお、不感帯設定部34、Z動作点設定部37に関する構成や処理は、あってもなくてもよい。不感帯空隙2x、2y、2zだけでクロストークの除去が完全でない場合は、不感帯設定部34、Z動作点設定部37に関する構成や処理を適用すればよい。
【0077】
なお、Z歪センサ5zは、ストレインゲージ以外に圧電素子でもよい。また、Z歪センサ5zは、機械的接点を有するタクトスイッチ、発光ダイオードと受光素子による光インタラプタ、磁石とホール素子を用いた近接スイッチなどの、ON/OFF検出スイッチでもよい。この場合は、情報処理部40のZ信号Vzは、デジタル値Dzとして使用できる。これらのセンサやスイッチを含めて、5zは、Z軸センサと呼べる。Z軸センサとして光インタラプタを使用する場合で、遮光板をZ圧力伝達部2dに取り付ける場合は、遮光板が発光ダイオードの光を遮る位置の光線自体が作用点に相当し、遮光板自身が光線に対する駆動点であると定義することができる。すなわち不感帯空隙2zを設けるとは、遮光板と発光ダイオード、受光素子の距離を適当な間隔空けることである。また、Z圧力伝達部2dが、光インタラプタの遮光板を駆動する場合は、Z圧力伝達部2dの下面が駆動点、遮光板が作用点であり、空隙は、Z圧力伝達部2dの下面と遮光板との間に設ければ良い。磁石とホール素子を用いた近接スイッチにおいては、磁石を、Z圧力伝達部2dに取り付ける場合と、Z圧力伝達部2dが空隙を介して磁石を駆動する場合とがあり、遮光板と同様の考え方を適用できる。また、駆動点、作用点は、力、圧力が直接作用する以外に、位置の変化である変位の形で駆動して、光の強さ、磁界の強さなどに作用を及ぼすことも含む概念である。光の強さ、磁界の強さなどが変化を受けることも、X軸、Y軸、Z軸などの力が加わるという概念に含める。あるいは、操作ボタン2に対する圧力が、変位の形で、光の強さ、磁界の強さに対して伝わると考えても良い。また、磁石の磁力という力が、センサであるホール素子に加わるともいえる。光インタラプタでは、遮光板の遮光力という力が、発光ダイオードと受光素子の間の光線に加わるともいえる。遮光力とは、遮光板が光を遮断する程度を表し、完全な不透明板では遮光力が大きく、半透明板では、社効力が弱く、遮光板が光線をより大きく遮るほど、遮光力は大きい。このように、どのようなセンサを使用しても、力が加わるセンサの作用点と、作用点に力を加える駆動点が存在する。
【0078】
本実施の形態の三軸センサ4Bは、足台10の上に取り付けたが、1枚の基板上にX起歪板4x、X起歪板4x、および、Z歪センサ5zまたはZ軸センサを取り付けた一体型の三軸センサとし、基板を足台10に取り付けるようにしてもよい。
(その他の実施の形態および補足)
【0079】
なお、操作ボタン2を操作しない状態では、Xセンサ出力、Yセンサ出力、Zセンサ出力は、いずれも、0Vの電圧であるべきである。しかし、センサの温度特性、経年変化、各起歪板4x、4yなどの変形により、0Vの出力電圧からずれてオフセット電圧となることがある。このような誤差電圧は、X信号増幅部31、Y信号増幅部32、Z信号増幅部34でオフセット調整をすればよい。オフセット調整回路は、演算増幅器の回路では周知である。また、上記不感帯設定部34やZ動作点設定部37は、上記オフセットを除去する作用も有する。情報処理部40に調整モードを設けて、操作ボタン2を操作しない状態でのDsx、Dsy、Dszを誤差分として計測し、Dsx、Dsy、Dszから計測した誤差分を引き算した修正値をDsx、Dsy、Dszとして使用するようにしてもよい。
【0080】
本発明の入力操作装置は、パソコン操作に通常使用しない身体の部分であって、比較的随意動作をしやすい部位として足母指を使用する足指用の入力操作装置である。手と比較すると足の母指の運動機能は不十分で、力の調整能力も低い。本発明では、動作点を移動せず、あるいは、殆ど移動させずに、加える力の変化だけでカーソルやポインタを動かすことができる。通常のマウスのように、手元の移動が不必要であり、キーボード操作などで両手使っている場合、カーソル移動のためにそれらの作業を中断してマウスを操作する必要がなくなる。手が使えない状態でも、身体の一部、例えば足母指などを接触するだけで自由にカーソルやポインタを制御できる。
【0081】
本発明の入力操作装置は、最初に操作ボタン2をZ方向に押し下げ、そのあと、Z方向に力を加えたまま、XY方向へ押すことにより、カーソルやポインタをドラッグする操作も可能にする。これは、操作ボタン2の操作により、Xセンサ出力、Yセンサ出力、Zセンサ出力を選択的に出力させるだけでなく、同時に出力させることも可能にしているからである。
【0082】
操作ボタン2の上面は、真球、楕円球などの球の一部の形状以外でもよく、上に凸の形状で、足の親指が掛けられればよい。操作ボタン2の細部の形状、受圧部3の形状は、上記実施の形態の図面に限らず変更してもよい。図13に示した操作ボタン2の不感帯空隙2x、2yの形状も図13に限らない。
【0083】
本発明に使用する三軸センサのX方向、Y方向、Z方向のセンサを含む各ブロックは、図2の三軸センサ4のように、一体化されていても良いし、図13の三軸センサ4Bのように、3種類のブロック部材が別々でもよい。Z方向のセンサブロックだけが別になっていても良い。
本発明の入力操作装置は、足台10が垂直になるように立てて、肩の付近に設置すれば、肩を操作ボタン2に押し付けて3軸方向に制御することにより、入力操作が可能である。
上記足台10は、足全体が乗せられる形状が最も好ましいが、足の前部半分を乗せるようにしてもよい。
なお、本発明は、以上の各実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0084】
以上のように、本発明にかかる入力操作装置は、繊細な動きが苦手な身体の他の部分を使用して操作可能な入力操作装置であり、身体障害者だけでなく、通常の人も入力操作に活用可能な入力操作装置として利用できる。
【図面の簡単な説明】
【0085】
【図1】本発明の一実施形態による足台形状の入力操作装置の図
【図2】本発明の一実施形態による入力操作装置の操作部の図
【図3】本発明の一実施形態による操作部の分解図
【図4】本発明の一実施形態による入力操作装置の情報処理部の図
【図5】本発明の一実施形態による記憶手段の記憶データの図
【図6】本発明の一実施形態による情報処理部の処理フローチャート
【図7】本発明の一実施形態による情報処理部の処理フローチャート
【図8】本発明の一実施形態による情報処理部の処理フローチャート
【図9】本発明の一実施形態による情報処理部の処理フローチャート
【図10】本発明の一実施形態による情報処理部の信号波形の図
【図11】本発明の一実施形態による他の操作部の図
【図12】本発明の一実施形態による別の操作部の図
【図13】本発明の一実施形態による別の操作部の図
【符号の説明】
【0086】
10 足台
20、20a、20A、20B 操作部
2 操作ボタン
2a Z圧力伝達部
2b 外周部
2x、2y 挿入穴
3 受圧部
3a 内面
3b 枠
3c 下きり欠き部分
3d 穴
4、4A、4B 三軸センサ
4x X起歪板
4y Y起歪板
4z Z起歪板
4c Z起歪板周囲
5x X歪センサ
5y Y歪センサ
5z Z歪センサ
6、7 支持部
31 X信号増幅部
32 Y信号増幅部
33 Z信号増幅部
34 不感帯設定部
35 移動速度設定部
36 ホールド時間設定部
37 Z動作点設定部
40 情報処理部
50 マウス信号変換部
【特許請求の範囲】
【請求項1】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、
足を乗せる足台を具備し、
前記三軸センサは前記足台に取り付けられ、
前記操作ボタンは、前記足台上に設けられ、
足の親指により圧力を受けた前記操作ボタンにより前記三軸センサが駆動され、足の親指により前記操作ボタンがX軸、Y軸、Z軸の3軸の任意の方向に操作される足台状の入力操作装置。
【請求項2】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、
前記操作ボタンが受ける圧力の内、X軸、Y軸の圧力を主として受け、中心部にZ方向に穴が開いた受圧部、
を具備し、
前記受圧部は、前記三軸センサの前記X軸作用点または作用面と、Y軸作用点または作用面に当接し、
前記操作ボタンの下面中心部が前記中心部の穴を介して前記三軸センサの前記Z軸作用点または作用面に当接または当接可能に対向し、
前記受圧部は、前記三軸センサの前記Z軸作用点または作用面に当接しない構造であることを特徴とする入力操作装置。
【請求項3】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が凸を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタン、
を具備し、
X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設け、
Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設け、
Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置。
【請求項4】
請求項2または請求項3記載の入力操作装置と、足を乗せる足台を具備し、
前記入力操作装置は前記足台上に設けられ、
前記入力操作装置の前記操作ボタンは、足の親指によりX軸、Y軸、Z軸の3軸の任意の方向に操作される足台状の入力操作装置。
【請求項5】
前記操作ボタンは、弾性体により構成される請求項1から請求項4いずれか記載の入力操作装置。
【請求項6】
前記三軸センサのXセンサ出力に基づき表示器上の表示マークの左右方向の移動速度に対応するX速度制御情報を生成し、前記三軸センサのYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報を生成し、前記三軸センサのZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報を生成する情報処理部であって、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるための情報処理部を更に具備する請求項1から請求項5いずれか記載の入力操作装置。
【請求項7】
前記Xセンサ出力が所定の大きさ以下の場合、前記X速度制御情報を停止情報とし、前記Yセンサ出力が所定の大きさ以下の場合、前記Y速度制御情報を停止情報とする不感帯領域を設けた請求項6記載の入力操作装置。
【請求項1】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、
足を乗せる足台を具備し、
前記三軸センサは前記足台に取り付けられ、
前記操作ボタンは、前記足台上に設けられ、
足の親指により圧力を受けた前記操作ボタンにより前記三軸センサが駆動され、足の親指により前記操作ボタンがX軸、Y軸、Z軸の3軸の任意の方向に操作される足台状の入力操作装置。
【請求項2】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力、または加圧力による歪、または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力による圧力を受ける上面が凸を成す形状を有する操作ボタンと、
前記操作ボタンが受ける圧力の内、X軸、Y軸の圧力を主として受け、中心部にZ方向に穴が開いた受圧部、
を具備し、
前記受圧部は、前記三軸センサの前記X軸作用点または作用面と、Y軸作用点または作用面に当接し、
前記操作ボタンの下面中心部が前記中心部の穴を介して前記三軸センサの前記Z軸作用点または作用面に当接または当接可能に対向し、
前記受圧部は、前記三軸センサの前記Z軸作用点または作用面に当接しない構造であることを特徴とする入力操作装置。
【請求項3】
X軸、Y軸、Z軸の力が加わる作用点または作用面を具備し、X軸、Y軸、Z軸の3軸の加圧力または加圧力による歪または変位を検知し、Xセンサ出力、Yセンサ出力、Zセンサ出力を出力する三軸センサと、
X軸、Y軸、Z軸の3軸の任意の方向の外力を受ける上面が凸を成す形状を有し、前記X軸作用点または作用面に圧力を伝えるX駆動点または駆動面、前記Y軸作用点または作用面に圧力を伝えるY駆動点または駆動面、前記Z軸作用点または作用面に圧力を伝えるZ駆動点または駆動面を具備する操作ボタン、
を具備し、
X駆動点または駆動面と前記X軸作用点または作用面との間に空隙を設け、
Y駆動点または駆動面と前記Y軸作用点または作用面との間に空隙を設け、
Z駆動点または駆動面と前記Z軸作用点または作用面との間に空隙を設けてなる入力操作装置。
【請求項4】
請求項2または請求項3記載の入力操作装置と、足を乗せる足台を具備し、
前記入力操作装置は前記足台上に設けられ、
前記入力操作装置の前記操作ボタンは、足の親指によりX軸、Y軸、Z軸の3軸の任意の方向に操作される足台状の入力操作装置。
【請求項5】
前記操作ボタンは、弾性体により構成される請求項1から請求項4いずれか記載の入力操作装置。
【請求項6】
前記三軸センサのXセンサ出力に基づき表示器上の表示マークの左右方向の移動速度に対応するX速度制御情報を生成し、前記三軸センサのYセンサ出力に基づき表示器上の表示マークの上下方向の移動速度に対応するY速度制御情報を生成し、前記三軸センサのZセンサ出力に基づき表示器上の表示マークの位置決定のクリック制御情報を生成する情報処理部であって、X方向センサ出力、Y方向センサ出力の大きさに応じて、前記表示マークの移動速度を変更させるための情報処理部を更に具備する請求項1から請求項5いずれか記載の入力操作装置。
【請求項7】
前記Xセンサ出力が所定の大きさ以下の場合、前記X速度制御情報を停止情報とし、前記Yセンサ出力が所定の大きさ以下の場合、前記Y速度制御情報を停止情報とする不感帯領域を設けた請求項6記載の入力操作装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−94469(P2007−94469A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−279144(P2005−279144)
【出願日】平成17年9月27日(2005.9.27)
【出願人】(504143441)国立大学法人 奈良先端科学技術大学院大学 (226)
【出願人】(503061485)株式会社テック技販 (5)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月27日(2005.9.27)
【出願人】(504143441)国立大学法人 奈良先端科学技術大学院大学 (226)
【出願人】(503061485)株式会社テック技販 (5)
【Fターム(参考)】
[ Back to top ]