
入力装置および方法、並びにプログラム

【課題】電波による誤検出を防止する。
【解決手段】入力装置31は、テレビジョン受像機の画像表示部の画面上に表示されるポインタの動きに対応する速度を生成するためにユーザーにより操作される。角速度センサー58は、入力装置31の操作により、ポインタの動きに対応する速度を生成するための検出値を検出する。MPU52Bの演算部は、角速度センサー58で検出された検出値から、入力装置31の速度を演算する。MPU52Aは、演算された速度をテレビジョン受像機に電波で送信する。MPU52Bは、速度が電波でテレビジョン受像機に送信されていない期間に、角速度センサー58が検出した検出値を、角速度センサー58から取り込む。電波によるノイズを含む検出値が取り込まれるのが防止される。
【解決手段】入力装置31は、テレビジョン受像機の画像表示部の画面上に表示されるポインタの動きに対応する速度を生成するためにユーザーにより操作される。角速度センサー58は、入力装置31の操作により、ポインタの動きに対応する速度を生成するための検出値を検出する。MPU52Bの演算部は、角速度センサー58で検出された検出値から、入力装置31の速度を演算する。MPU52Aは、演算された速度をテレビジョン受像機に電波で送信する。MPU52Bは、速度が電波でテレビジョン受像機に送信されていない期間に、角速度センサー58が検出した検出値を、角速度センサー58から取り込む。電波によるノイズを含む検出値が取り込まれるのが防止される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は入力装置および方法、並びにプログラムに関し、特に、電波によるノイズの検出を防止するようにした入力装置および方法、並びにプログラムに関する。
【背景技術】
【0002】
一般的に、パーソナルコンピュータに付属しているマウスは机上で操作される。ユーザーがマウスを机上で操作すると、その相対的動きが検出され、その動きに対応する方向にポインタが移動表示される。しかし、このようなマウスは、操作のための平面が必要となり、使用環境が制限される。
【0003】
そこで、ユーザーに、3次元の自由空間で任意の方向にマウスを操作させ、その操作された方向にポインタを移動させることも提案されている(例えば特許文献1)。
【0004】
マウスを自由空間で操作させたとしても、その操作信号を信号ラインを介してパーソナルコンピュータに伝送したのでは、やはり使用環境が制限される。そこで操作信号を無線で伝送することが考えられる。
【0005】
赤外線により操作信号を伝送すれば、信号ラインは不要となる。しかし赤外線は指向性があるため、自由空間で任意の方向に操作されるマウスからパーソナルコンピュータの方向に操作信号を伝送することは困難である。
【0006】
また、赤外線を発生する複数のLED(Light Emitting Diode)を多方向に向けて配置することも考えられる。しかし、そのようにすると、消費電力が大きくなり、マウスが大型化し、コスト高となる。また伝送ビットレートが低く、XY座標をリアルタイムで伝送することが困難である。
【0007】
そこでマウスから、その操作信号を電波でパーソナルコンピュータに伝送することが考えられる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特公平6−7371号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
マウスを自由空間で3次元的に操作させる場合、角速度センサーや加速度センサーなどの慣性センサーがマウス内に収容される。このときマウスから操作信号として伝送した電波が、マウスに内蔵されている慣性センサーに対する電波ノイズとなり、検出信号に大きなノイズが乗ってしまうことがある。例えば角速度センサーには、微弱なコリオリ力を検出するため、検出信号を数百倍乃至数千倍に増幅する増幅器を含むICが内蔵されていて、外部からの電波の影響が大きい場合、信号成分だけをフィルタにより抽出することは困難である。
【0010】
また上記のようなマウスでも、今後小型化が進むと考えられるが、そのような場合にどうしてもアンテナと角速度センサーを充分離して配置することが難しくなり、更に電波ノイズの影響は大きくなってしまう。
【0011】
本発明は、このような状況に鑑みてなされたものであり、電波によるノイズの検出を防止することができるようにするものである。
【課題を解決するための手段】
【0012】
本発明の一側面は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部と、操作部の操作により、画像の動きに対応する対応値を生成するための検出値を検出する検出部と、検出部で検出された検出値から、対応値を演算する演算部と、演算部が演算した対応値を電子機器に電波で送信する送信部と、検出部が検出した検出値を、対応値が電波で電子機器に送信されていない期間に、検出部から取り込む取り込み部とを備える入力装置である。
【0013】
本発明の一側面においては、操作部は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される。検出部は、操作部の操作により、画像の動きに対応する対応値を生成するための検出値を検出する。取り込み部は、検出部が検出した検出値を、対応値が電波で電子機器に送信されていない期間に、検出部から取り込む。演算部は、検出部で検出された検出値から、対応値を演算する。送信部は、演算部が演算した対応値を電子機器に電波で送信する。
【発明の効果】
【0014】
以上のように、本発明の一側面によれば、電波によるノイズの検出を防止することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の入力システムの構成を示すブロック図である。
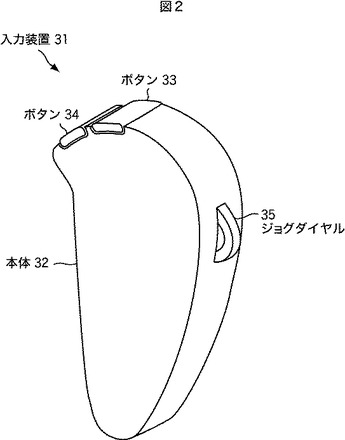
【図2】入力装置の外観の構成を示す斜視図である。
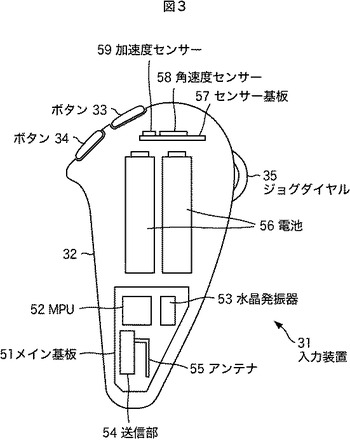
【図3】入力装置の内部の構成を示す図である。
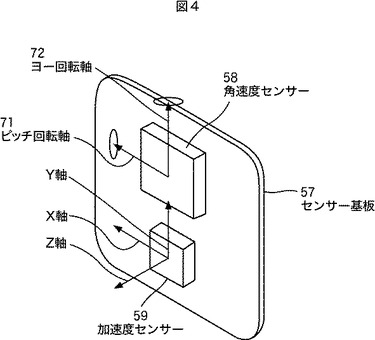
【図4】センサー基板の構成を示す斜視図である。
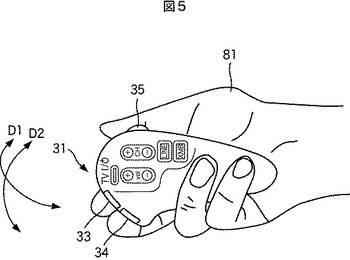
【図5】入力装置の使用状態を示す図である。
【図6】入力装置の電気的構成を示すブロック図である。
【図7】MPUの機能的構成を示すブロック図である。
【図8】MPUの機能的構成を示すブロック図である。
【図9】MPUのデータ取り込み処理を説明するフローチャートである。
【図10】MPUの通信処理を説明するフローチャートである。
【図11】対応値演算部の機能的構成を示すブロック図である。
【図12】対応値演算処理を説明するフローチャートである。
【図13】MPUの機能的構成を示すブロック図である。
【図14】MPUの機能的構成を示すブロック図である。
【図15】MPUの通信処理とデータ取り込み処理を説明するフローチャートである。
【発明を実施するための形態】
【0016】
以下、発明を実施するための最良の形態(以下、実施の形態と称する)について説明する。なお、説明は以下の順序で行う。
1.第1の実施の形態(システムの構成)
2.第1の実施の形態(入力装置の構成)
3.第1の実施の形態(入力装置の電気的構成)
4.第1の実施の形態(入力装置のMPUの機能的構成)
5.第1の実施の形態(入力装置の動作)
6.第1の実施の形態(対応値演算処理)
7.第2の実施の形態(入力装置のMPUの機能的構成)
8.第2の実施の形態(入力装置の動作)
9.変形例
【0017】
<1.第1の実施の形態>
[システムの構成]
【0018】
図1は、本発明の入力システムの一実施の形態の構成を表している。
【0019】
この入力システム1は、制御対象の電子機器としてのテレビジョン受像機10と、それを遠隔制御するポインティングデバイスあるいはリモートコントローラとしての入力装置31とにより構成されている。
【0020】
テレビジョン受像機10は、アンテナ11、受信部12、MPU(Micro Processing Unit)13、復調部14、ビデオRAM(Random Access Memory)15、および出力部16により構成されている。
【0021】
アンテナ11は、入力装置31からの電波を受信する。受信部12は、アンテナ11を介して受信した電波を復調し、MPU13に出力する。MPU13は、入力装置31からの指示に基づいて各部を制御する。
【0022】
復調部14は、図示せぬアンテナを介して受信されたテレビジョン放送信号を復調し、ビデオ信号をビデオRAM15に出力し、オーディオ信号を出力部16に出力する。ビデオRAM15は、復調部14から供給されたビデオ信号に基づく画像と、MPU13からのポインタ、アイコンなどのオンスクリーンデータの画像とを合成し、出力部16の画像表示部に出力する。出力部16は、画像表示部で画像を表示するほか、スピーカなどで構成される音声出力部から、ビデオ信号に対応する音声信号の音声や、MPU13から供給される音声を出力する。
【0023】
図1の表示例においては、出力部16の画像表示部に、アイコン21とポインタ22が表示されている。入力装置31はポインタ22の表示位置を変更する場合の他、テレビジョン受像機10を遠隔制御する場合にユーザーにより操作される。
【0024】
[入力装置の構成]
【0025】
図2は、入力装置31の外観の構成を表している。入力装置31は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部としての本体32を有している。本体32の上面には、ボタン33,34が、右側面には、ジョグダイヤル35が、それぞれ設けられている。
【0026】
図3は、入力装置31の本体32の内部の構成を表している。入力装置31の内部には、メイン基板51、センサー基板57、および電池56が収容されている。メイン基板51には、MPU52、水晶発振器53、送信部54、およびアンテナ55が取り付けられている。
【0027】
図4に拡大して示されるように、センサー基板57には、MEMS(Micro Electro Mechanical Systems)の技術により製造された、角速度センサー58と加速度センサー59が取り付けられている。センサー基板57は、慣性センサーである角度センサー58と加速度センサー59の直交する2つの感度軸であるX軸とY軸に平行とされている。
【0028】
本体32の先頭(図5における左方向の端部)を、典型的にはその先に位置するテレビジョン受像機10(図5には示されていないが左方向に位置する)に向けた状態で、本体32の全体がユーザーにより、例えば図5に示される任意の方向D1や方向D2に操作された場合、2軸式振動型角速度センサーで構成される角速度センサー58は、それぞれX軸とY軸と平行なピッチ回転軸71とヨー回転軸72を中心として回転するピッチ角とヨー角の角速度を検出する。加速度センサー59は、X軸およびY軸の方向の加速度を検出する。加速度センサー59は、センサー基板57を感度平面として、重力加速度をベクトル量として検知することができる。加速度センサー59としては、X軸、Y軸、およびZ軸の3軸を感度軸とする3軸型加速度センサーを用いることもできる。
【0029】
2本の電池56は各部に必要な電力を供給する。
【0030】
図5は、入力装置31の使用状態を表している。同図に示されるように、入力装置31はユーザーが手81で保持し、入力装置31の全体を3次元の自由空間において任意の方向に操作する。入力装置31はその操作された方向を検出し、その操作された方向の操作信号を出力する。また入力装置31は、ボタン33,34や、ジョグダイヤル35などのボタンが操作された場合、その操作信号を出力する。
【0031】
ボタン33は、通常の平面上で操作されるマウスの左ボタンに対応し、ボタン34は右ボタンに対応する。ボタン33は人指し指で、ボタン34は中指で、ジョグダイヤル35は親指で、それぞれ操作される。ボタンが操作されたとき発行されるコマンドは任意であるが、例えば次のように設定することができる。
【0032】
ボタン33の1回押し:左クリック:選択
ボタン33の長押し:ドラッグ:アイコンの移動
ボタン33の2度押し:ダブルクリック:ファイル、フォルダを開く、プログラムを実行する
ボタン34を1回押す:右クリック:メニューの表示
ジョグダイヤルを回す:スクロール
ジョグダイヤルを押す:決定
【0033】
このように設定すれば、ユーザーは、平面上で操作されるマウスと同様の操作感覚で入力装置31を使用することができる。
【0034】
ボタン33は2段スイッチとすることもできる。この場合、1段目のスイッチが操作されたとき、または押圧されたままの状態にされたとき、入力装置31の移動を表す操作信号が出力され、2段目のスイッチが操作されたとき選択される。勿論、専用のボタンを設け、そのボタンが操作されたとき、移動を表す操作信号が出力されるようにすることもできる。
【0035】
[入力装置の電気的構成]
【0036】
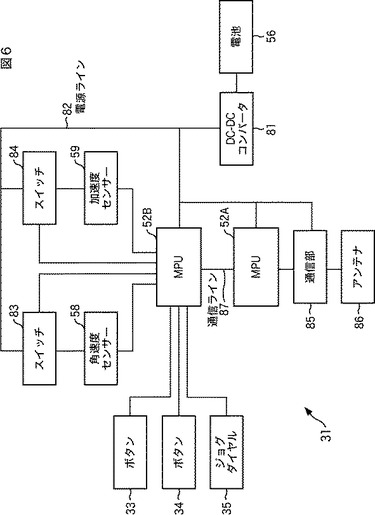
図6は、入力装置31の電気的構成を表している。
【0037】
DC/DCコンバータ81は、電池56からの電圧を所定の電圧に変換して、電源ライン82を介して出力する。この電力はスイッチ83,84を介して角速度センサー58と加速度センサー59に供給されている。また電力はMPU52を構成するMPU52A,52Bと、通信部85にも供給されている。
【0038】
MPU52を構成する2つの独立したMPUのうちの一方のMPU52Bは、ボタン33,34や、ジョグダイヤル35からの信号、並びに角速度センサー58、加速度センサー59の検出信号、スイッチ83,84の情報などを加工し、その加工信号を通信ライン87を介してMPU52Aに出力する。
【0039】
MPU52を構成する2つの独立したMPUのうちの他方のMPU52Aは、入力装置31全体の動作の制御を行う他、テレビジョン受像機10との間の通信の制御を行う。通信部85はMPU52Aにより制御され、アンテナ86を介してテレビジョン受像機10と電波で通信する。MPU52AとMPU52Bは通信ライン87により接続されている。
【0040】
このようにMPU52を2個に分けることで、迅速な処理が可能になる。また、ユーザーからの要望により、無線通信方式として、ブルートゥース、Zigbee、2.4GHz帯独自規格などの異なる方式が採用されたとしても、ポインタの制御用のMPUは共通にすることができるので、開発期間を短くすることができ、全体としてコスト的に有利となる。
【0041】
[入力装置のMPUの機能的構成]
【0042】
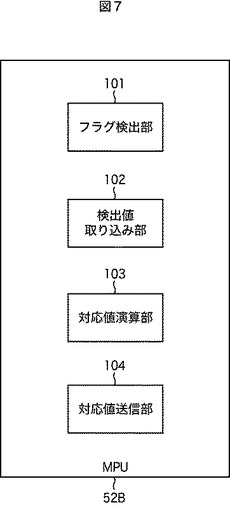
図7と図8は、内蔵するメモリに記憶されているプログラムに従って動作するMPU52BとMPU52Aの機能的構成を表している。
【0043】
MPU52Bは、図7に示されるように、フラグ検出部101、検出値取り込み部102、対応値演算部103、および対応値送信部104を有している。
【0044】
フラグ検出部101は、図8を参照して後述するMPU52Aのフラグ設定部123により設定されるフラグを検出する。検出値取り込み部102は、角速度センサー58と加速度センサー59からの検出値を取り込む。対応値演算部103は、検出値に対応する対応値を演算する。送信部104は、対応値をMPU52Aに送信する。
【0045】
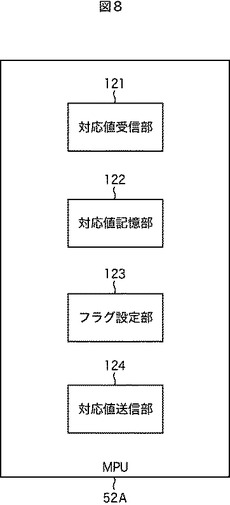
MPU52Aは、図8に示されるように、対応値受信部121、対応値記憶部122、フラグ設定部123、および対応値送信部124を有している。
【0046】
対応値受信部121は、MPU52Bから通信ライン87を介して送信されてくる対応値を受信する。対応値記憶部122は、対応値受信部221により受信された対応値を記憶する。フラグ設定部123は、対応値をテレビジョン受像機10に電波で送信中であることを表すフラグを管理する。対応値送信部124は、対応値の電波によるテレビジョン受像機10への送信を管理する。
【0047】
[入力装置の動作]
【0048】
次に図9と図10を参照して、入力装置31が操作された場合に、その操作信号がテレビジョン受像機10に送信される処理について説明する。
【0049】
テレビジョン受像機10の出力部16に表示されているポインタ22を所定の方向に移動させるために、ユーザーが本体32を手で保持して、2段スイッチのボタン33の1段目を操作するか、押圧したままの状態にして、入力装置31の全体を任意の所定の方向に操作した場合、すなわち、3次元の自由空間において、入力装置31の全体が任意の方向に動かされた場合、MPU52Bは図9のフローチャートに示されるデータ取り込み処理を実行する。
【0050】
すなわち、ステップS1においてMPU52Bのフラグ検出部101は、フラグを検出する。図10を参照して後述するように、MPU52Aは通信部85からアンテナ86を介して無線で操作信号をテレビジョン受像機10に送信している期間中、フラグをセットする。このフラグが検出される。
【0051】
ステップS2において検出値取り込み部102は、フラグがセットされているかを判定する。ステップS1で検出されたフラグがセットされていると判定された場合、処理はステップS1に戻り、それ以降の処理が繰り返される。すなわち、この場合、MPU52Aが操作信号を電波でテレビジョン受像機10に送信しているので、後述するステップS3乃至ステップS5の処理は実行されない。つまり、センサーからの検出値の取り込みは禁止される。
【0052】
ステップS1で検出されたフラグがセットされていないと判定された場合、MPU52Aは操作信号を電波でテレビジョン受像機10に送信していない。そこでステップS3において検出値取り込み部102は、検出部としての角速度センサー58と加速度センサー59が検出する検出値を取り込む。すなわち、画像表示部の画面としてのポインタ22の動きに対応する対応値を生成するための検出値が取り込まれる。具体的には、角速度センサー58の検出値と加速度センサー59の検出値が、MPU52Bに内蔵されるA/D変換部によりそれぞれA/D変換され、取り込まれる。
【0053】
ステップS4において対応値演算部103は、対応値を演算する。その詳細は図12を参照して後述するが、これによりステップS3で取り込まれた検出値に対応する対応値が演算される。
【0054】
ステップS5において対応値送信部104は、対応値を送信する。すなわち、ステップS4で演算された対応値が、通信ライン87を介してMPU52Aに送信される。
【0055】
角度変化により生じるコリオリ力は微弱なので、角速度センサー58はコリオリ力の検知信号を数百倍乃至数千倍に増幅して出力するための増幅器のICを内蔵している。試験の結果、角速度センサーは電波ノイズの影響を受けやすいのもが多かった。その結果、テレビジョン受像機10に向けて送信されている電波が角速度センサー58により受信されると、角速度センサー58の出力のレベルが、限度にまで達することがあった。このように操作信号の電波が受信された状態では、コリオリ力、すなわち角速度を正確に検出することが困難になる。
【0056】
そこでこの実施の形態の場合、上述したように、電波の発生期間においては、角速度センサー58の検出値の取り込みは禁止され、電波が発生されていない期間においてのみ、角速度センサー58の検出値の取り込みが行われる。従って、電波によるノイズの影響を受けずに、角速度の正確な検出が可能となる。
【0057】
加速度センサー59が電波による影響をそれ程受けない場合、加速度センサー59の検出値は、電波の送信中においても取り込むようにしてもよい。しかし、角速度センサー58との検出タイミングを一致させるため、本実施の形態においては加速度センサー59の検出値の取り込みも、電波の送信中は禁止させる。
【0058】
このようなMPU52Bの処理に対応して、MPU52Aは、図10のフローチャートに示されるような処理を実行する。
【0059】
ステップS31において、MPU52Aの対応値受信部121は、MPU52Bから通信ライン87を介して送信されてきた対応値を受信する。ステップS32において対応値記憶部122は、ステップS31で受信された対応値を記憶する。ステップS33においてフラグ設定部123は、フラグをセットする。フラグがセットされた後、対応値送信部124はステップS34において、対応値を送信する。すなわち、通信部85は、対応値記憶部122に一旦記憶された対応値を変調し、アンテナ86を介して、電波でテレビジョン受像機10に向けて送信する。
【0060】
テレビジョン受像機10においては、この電波がアンテナ11を介して受信部12により受信され、復調されて、MPU13に供給される。MPU13は受信した対応値に基づいて、ビデオRAM15に所定の画像データを描画し、出力部16において、ポインタ22を、入力装置31の操作に対応する位置に移動、表示させる。
【0061】
この実施の形態の場合、上述したように、入力装置31の操作速度(Vx,Vy)が対応値とされる。テレビジョン受像機10においては、次式に従ってポインタ22の座標値が生成される。
X(t)=X(t−1)+Vx
Y(t)=Y(t−1)+Vy (1)
【0062】
すなわち、前回の座標(X(t−1),Y(t−1))に、画像表示部の画面上に表示される画像であるポインタ22の動きに対応する対応値としての速度(Vx,Vy)を加算することで、新たな座標値が演算される。生成された座標値にポインタ22が表示されるように制御される。
【0063】
対応値の送信が完了したとき、ステップS35において、フラグ設定部123は、ステップS33でセットしたフラグをリセットする。このように、フラグは電波が送信されている期間にはセットされ、電波が送信されていない期間にはリセットされる。
【0064】
以上のような処理を繰り返すことで、対応値は断続的にテレビジョン受像機10に電波で送信される。ここでは、例えば、Bluetooth(登録商標)やZigbee(登録商標)などの規格に基づくパケット通信を利用することができる。
【0065】
このように、この実施の形態においては、MPU52Bは、MPU52Aが対応値を電波で送信している期間をフラグに基づき検出し、その期間においては、検出値を取り込まないように、検出値の取り込みタイミングを管理する。従って、対応値の電波による送信中に検出値が取り込まれることがないので、センサーが電波によるノイズを、入力装置31の操作と誤検出することが防止される。この効果は、入力装置31を小型化し、センサーとアンテナの距離が短くなった場合に特に顕著となる。
【0066】
なお、以上においては、対応値が電波で送信されている期間、フラグがセットされるようにしたが、さらに入力装置31の各種のボタンが操作されている期間においても、フラグがセットされるようにしてもよい。そのようにすれば、電波によるノイズを、入力装置31の操作と誤検出することが、さらに確実に防止される。
【0067】
以上のように、図9と図10の実施の形態の場合、MPU52AとMPU52Bは非同期で動作することができる。従って、設計の自由度が高くなる。
【0068】
[対応値演算処理]
【0069】
次に、図9のステップS4において実行される対応値演算処理の詳細について説明する。この処理を実行するため、対応値演算部103は、図11に示されるような機能的構成を有している。
【0070】
対応値演算部103は、変化率演算部161、判定部162、半径演算部163、低域成分抽出部164、半径記憶部165、半径読み出し部166、および速度演算部167を有している。
【0071】
変化率演算部161は、加速度の変化率や角加速度の変化率を演算する。判定部162は、各種の判定処理を実行する。半径演算部163は、入力装置31が操作されたときの回転半径を演算する。低域成分抽出部164は、データの低域成分を抽出する。半径記憶部165は、演算された回転半径を記憶する。半径読み出し部166は、記憶された回転半径を読み出す。速度演算部167は、速度を演算する。
【0072】
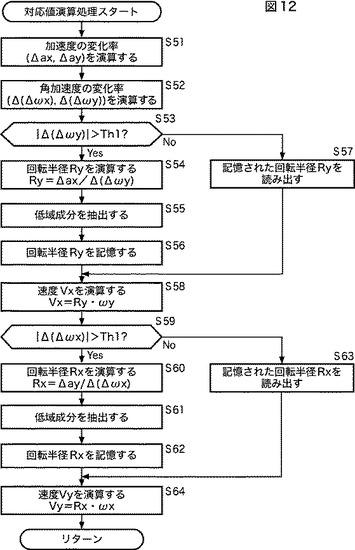
次に、図12を参照して、対応値演算処理の詳細について説明する。
【0073】
最初に、速度演算の原理について説明する。
【0074】
入力装置31の速度は角速度に回転半径を乗算することで求められる。すなわち、ユーザーが入力装置31を操作した場合の入力装置31の運動は、ユーザーの肩、肘、または手首などを中心とした回転運動を合成したものとなる。そしてその回転半径は合成された回転運動の時間毎に変化する回転中心から入力装置31までの距離となる。
【0075】
入力装置31の速度を(Vx,Vy)、角速度を(ωx,ωy)とすると、回転半径(Rx,Ry)は次式で表される。
(Rx,Ry)=(Vx,Vy)/(ωx,ωy)・・・(2)
【0076】
式(2)の右辺の(Vx,Vy),(ωx,ωy)は、速度のディメンジョンである。この式(2)の右辺に表されている速度と角速度とがそれぞれ微分され、加速度、あるいは加速度の時間変化率のディメンジョンとされても相関関係は失われない。同様に、速度と角速度とがそれぞれ積分され、変位のディメンジョンとされても相関関係は失われない。
【0077】
従って、式(2)の右辺に表されている速度および角速度をそれぞれ変位、加速度、加速度の時間変化率のディメンジョンとして、以下の式(3)乃至式(5)が得られる。
(Rx,Ry)=(x,y)/(ψ,θ)・・・(3)
(Rx,Ry)=(ax,ay)/(Δωx,Δωy)・・・(4)
(Rx,Ry)=(Δax,Δay)/(Δ(Δωx),Δ(Δωy))
・・・(5)
【0078】
上記式のうち、例えば式(5)に注目すると、加速度(ax,ay)の変化率(Δax,Δay)と、角加速度(Δωx,Δωy)の変化率(Δ(Δωx),Δ(Δωy))が既知であれば、回転半径(Rx,Ry)を求められることが分かる。この実施の形態においては、式(5)に基づいて半径(Rx,Ry)が求められる。
【0079】
図12のステップS51において、微分フィルタとしての機能を有する変化率演算部161は、図9のステップS3で、加速度センサー59から取り込まれた検出値としての加速度(ax,ay)を微分して、加速度の変化率(Δax,Δay)を演算する。またステップS52において変化率演算部161は、図9のステップS3で、角速度センサー58から取り込まれた検出値としての角速度(ωx,ωy)を2階微分して、角加速度(Δωx,Δωy)の変化率(Δ(Δωx),Δ(Δωy))を演算する。
【0080】
ステップS51で加速度(ax,ay)の変化率(Δax,Δay)を算出する理由は、後述するステップS54で回転半径を求めるための他、加速度センサー59に対する重力加速度の影響を軽減するためである。
【0081】
すなわち、加速度センサー59が検出する加速度は、ユーザーが入力装置31を操作することで発生する慣性力による加速度と、重力による加速度を合成した加速度である。ただし、重力による加速度の変化率は、慣性力による加速度の変化率の約1/10程度の大きさであり、また重力による加速度と慣性力による加速度は、それらの周波数成分が異なっている。
【0082】
慣性力による加速度の周波数に比べて、重力による加速度の周波数の方が低い。微分演算は、ハイパスフィルタ特性を有するので、そのカットオフ周波数を、重力による加速度の周波数と慣性力による加速度の周波数の間の周波数に設定しておくことで、慣性力による加速度は通過させ、重力による加速度を減衰させることができる。従って、ステップS51の処理により得られる加速度(ax,ay)の変化率(Δax,Δay)は、重力による加速度の変化率の成分が減衰された、ほとんど慣性力による加速度の変化率となる。
【0083】
その結果、後述するステップS54で回転半径Ryが算出される際に、入力装置31の姿勢変化による傾き成分の加速度が反映され難くなる。従って、その回転半径Ryに基づいて算出される速度も、入力装置31の姿勢変化による傾き成分の加速度の影響を受け難くなる。これにより、入力装置31の姿勢変化による重力の影響が軽減される。
【0084】
なお、カットオフ周波数は、入力装置31の重力による加速度の周波数、および入力装置31の慣性力の加速度の周波数を考慮して、適宜設定される。また、このカットオフ周波数は、加速度センサー59の温度ドリフトによる低周波成分やDCオフセット値を考慮して設定するようにしてもよい。つまり、重力加速度の成分を含む低周波成分は、重力加速度の成分のほか、例えば温度ドリフトによる低周波成分やDCオフセット成分を含む場合もある。
【0085】
次にX軸方向の速度Vxを求める処理が行われる。すなわち、ステップS53において判定部162は、ステップS52で演算された、Y軸回りの角加速度変化率の絶対値|Δ(Δωy)|が、閾値Th1を超えるかを判定する。
【0086】
このように閾値判定が行われるのは、角加速度変化率(Δ(Δωx)),Δ(Δωy))は、角速度(ωx,ωy)の2階微分演算により算出されるからである。つまり、角速度(ωx,ωy)にノイズが生じていると、高周波数のノイズが、2階の微分演算により拡大してしまい、高周波数のノイズが拡大された状態で、角加速度変化率が算出される。その結果、角加速度変化率に基づいて算出される回転半径(Rx,Ry)、およびこの回転半径に基づいて算出される速度(Vx,Vy)がノイズに影響され、正確な回転半径、および速度を算出することが困難になる。特に、角加速度変化率の絶対値(|Δ(Δωx)|,|Δ(Δωy)|)が小さいほど、回転半径および速度へのノイズの影響が相対的に増大する。
【0087】
そこで、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1より大きい場合、つまり、ノイズの影響が小さい場合、ステップS54において半径演算部163は、ステップS52で演算された角加速度変化率Δ(Δωy)を用いて、回転半径Ryを次式に従って演算する。
Ry=Δax/Δ(Δωy) (6)
【0088】
ステップS55において低域成分抽出部164は、回転半径の信号Ryの低域成分を抽出する。これにより、高い周波数のノイズによる影響をさらに軽減することができる。この低域成分の抽出するローパスフィルタとしての処理は、信号の遅延を発生させるが、回転半径は急激に変化することがないため、その影響は比較的少ない。
【0089】
このローパスフィルタとしてのカットオフ周波数は、上記したようにステップS52で行われる演算により、高い周波数のノイズが発生する可能性があるため、そのノイズが減衰あるいは除去されるような周波数に適宜設定される。また、このローパスフィルタ、回転半径の信号が通過する際の応答遅れが最小となるように設計される。
【0090】
ステップS56において半径記憶部165は、ステップS54で演算され、ステップS55で低域成分が抽出された回転半径Ryを記憶する。
【0091】
一方、ステップS53において、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1以下であると判定された場合、つまり、ノイズの影響が大きい場合、ステップS54乃至ステップS56の処理は実行されない。その代わりに、ステップS57において半径読み出し部166は、ステップS56で前回記憶された回転半径Ryを読み出す。
【0092】
ステップS56またはステップS57の処理の後、ステップS58において速度演算部167は、次式に従って操作信号としての速度Vxを演算する。
Vx=Ry・ωy (7)
【0093】
この速度演算には、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1より大きい場合、すなわち、ノイズの影響が小さい場合、その絶対値が閾値Th1より大きい角加速度変化率|Δ(Δωy)|を用いてステップS53で演算された回転半径Ryが用いられる。しかし、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1以下である場合、すなわち、ノイズの影響が大きい場合、上記式の速度演算には、前回記憶された回転半径Ryが用いられる。
【0094】
同様の処理が、Y軸方向の速度Vyを求める場合にも実行される。
【0095】
すなわち、ステップS59において判定部162は、ステップS52で演算された、X軸回りの角加速度変化率の絶対値|Δ(Δωx)|が、閾値Th1を超えるかを判定する。
【0096】
角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1より大きい場合、つまり、ノイズの影響が小さい場合、ステップS60において半径演算部163は、ステップS52で演算された角加速度変化率Δ(Δωx)を用いて、回転半径Rxを次式に従って演算する。
Rx=Δay/Δ(Δωx) (8)
【0097】
ステップS61において低域成分抽出部164は、回転半径の信号Rxの低域成分を抽出する。これにより、高い周波数のノイズによる影響をさらに軽減することができる。
【0098】
このローパスフィルタとしてのカットオフ周波数は、上記したようにステップS52で行われる演算により、高い周波数のノイズが発生する可能性があるため、そのノイズが減衰あるいは除去されるような周波数に適宜設定される。また、このローパスフィルタ、回転半径の信号が通過する際の応答遅れが最小となるように設計される。
【0099】
ステップS62において半径記憶部165は、ステップS60で演算され、ステップS61で低域成分が抽出された回転半径Rxを記憶する。
【0100】
ステップS59において、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1以下であると判定された場合、つまり、ノイズの影響が大きい場合、ステップS60乃至ステップS62の処理は実行されない。その代わりに、ステップS63において半径読み出し部166は、ステップS62で前回記憶された回転半径Rxを読み出す。
【0101】
ステップS62またはステップS63の処理の後、ステップS64において速度演算部167は、次式に従って操作信号としての速度Vxを演算する。
Vy=Rx・ωx (9)
【0102】
この速度演算には、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1より大きい場合、すなわち、ノイズの影響が小さい場合、絶対値が閾値Th1より大きい角加速度変化率|Δ(Δωx)|を用いてステップS59で演算された回転半径Rxが用いられる。しかし、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1以下である場合、すなわち、ノイズの影響が大きい場合、上記式の速度演算には、前回記憶された回転半径Rxが用いられる。
【0103】
以上のようにして求められた速度(Vx,Vy)が、上述したように対応値としてMPU52Aに送信される。
【0104】
なお、本実施の形態では、ヨー方向およびピッチ方向の両方向について閾値を同じ値Th1としたが、両方向で異なる閾値が用いられてもよい。また、ステップS53乃至ステップS58の処理と、ステップS59乃至ステップS64の処理は、平行して実行させることができる。
【0105】
<2.第2の実施の形態>
[入力装置のMPUの機能的構成]
【0106】
MPU52BとMPU52Aを同期して動作させることもできる。この場合、MPU52BとMPU52Aは、それぞれ図13と図14に示されるような機能的構成を有する。
【0107】
MPU52Bは、図13に示されるように、取り込み指示受信部201、検出値取り込み部202、対応値演算部203、および対応値送信部204を有する。
【0108】
取り込み指示受信部201は、MPU52Aからの取り込み指示を受信する。検出値取り込み部202は、角速度センサー58と加速度センサー59からの検出値を取り込む。対応値演算部203は、検出値に対応する対応値を演算する。対応値送信部204は、対応値をMPU52Aに送信する。
【0109】
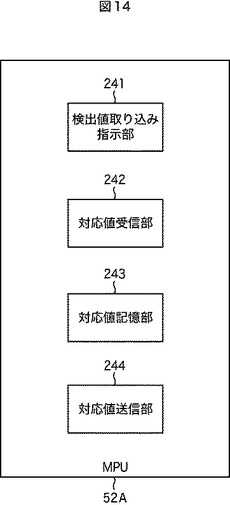
MPU52Aは、図14に示されるように、対応値取り込み指示部241、対応値受信部242、対応値記憶部243、および対応値送信部244を有する。
【0110】
検出値取り込み指示部241は、MPU52Bに対して検出値の取り込みを指示する。対応値受信部242は、MPU52Bからの対応値を受信する。対応値記憶部243は、対応値を記憶する。対応値送信部244は、テレビジョン受像機10に対して対応値を送信する。
【0111】
[入力装置の動作]
【0112】
次に、図15のフローチャートを参照して、入力装置31が操作された場合に、その操作に基づく対応値がテレビジョン受像機10に送信される処理について説明する。図15においてステップS81乃至ステップS84の処理はMPU52Aにより実行され、ステップS101乃至ステップS104の処理はMPU52Bにより実行される。
【0113】
テレビジョン受像機10の出力部16に表示されているポインタ22を所定の方向に移動させるために、ユーザーが本体32を手で保持して、ボタン33を2段操作するか、押圧したままの状態にして、入力装置31の全体を任意の所定の方向に操作した場合、すなわち、3次元の自由空間において、入力装置31の全体が任意の方向に動かされた場合、MPU52Aは図15のフローチャートに示される通信処理を実行する。
【0114】
ステップS81においてMPU52Aの検出値取り込み指示部241は、検出値の取り込みを指示する。この指示は、通信ライン87を介してMPU52Bに送信される。
【0115】
ステップS101にいて、MPU52Bの取り込み指示受信部201は、MPU52Aからの取り込み指示を受信する。ステップS102において、検出値取り込み部202は検出値を取り込む。すなわち、角速度センサー58と加速度センサー59の検出値が取り込まれる。ステップS103において対応値演算部203は、対応値演算処理を実行し、検出値に対応する対応値を演算する。この処理の詳細は図12を参照して説明した通りである。
【0116】
ステップS104において対応値送信部204は、対応値を送信する。すなわち、ステップS103で演算された対応値が、通信ライン87を介してMPU52Aに送信される。
【0117】
ステップS82において、MPU52Aの対応値受信部242は、対応値を受信する。すなわち、MPU52Bから送信されてきた対応値が受信される。ステップS83において対応値記憶部243は、受信された対応値を記憶する。ステップS84においてMPU52Aの対応値送信部244は、対応値を送信する。すなわち、ステップS82で受信され、ステップS83で一旦記憶された対応値が、通信部85により変調され、アンテナ86を介して、電波でテレビジョン受像機10に送信される。
【0118】
テレビジョン受像機10においては、この電波がアンテナ11を介して受信部12により受信され、復調されて、MPU13に供給される。MPU13は受信した操作信号に対応して、ビデオRAM15に所定の画像データを描画し、出力部16において、ポインタ22を、入力装置31の操作に対応する位置に移動、表示させる。
【0119】
テレビジョン受像機10においては、図10を参照して説明した場合と同様に、対応値としての速度に基づいて、式(1)に従って、ポインタ22の新たな座標が演算される。そして、その新たな位置にポインタ22が移動表示される。
【0120】
このように、この実施の形態においては、MPU52Aが対応値を電波で送信している期間は、検出値が取り込まれないように、MPU52Bの検出値の取り込みタイミングを管理する。従って、電波の送信中に検出値が取り込まれることがなく、センサーが電波によるノイズを、入力装置31の操作と誤検出することが防止される。この場合においても、その効果は、入力装置31を小型化し、センサーとアンテナの距離が短くなった場合に特に顕著となる。
【0121】
[変形例]
【0122】
以上においては、入力装置31により操作される電子機器を、テレビジョン受像機10としたが、パーソナルコンピュータ、携帯電話機、PDA(Personal Digital Assistants)その他の電子機器を制御する場合にも本発明は適用することができる。入力装置31は、これらの電子機器に着脱可能とされ、装着された場合、電子機器と一体化して使用されるようにすることもできる。
【0123】
また、本発明は3次元空間マウスに限らず、静電容量方式のタッチパッドのように電波の影響を受けやすいデバイスを用いて、画面上のポインタを移動させるための情報を、電波で電子機器に送信する入力装置に適用しても有効である。
【0124】
加速度センサー59により入力装置31の傾きを検出し、その傾きから対応値を演算することもできる。またセンサーとして、慣性センサーではない地磁気センサーを用いることも可能である。
【0125】
上述した一連の処理は、ハードウエアにより実行させることもできるし、ソフトウエアにより実行させることもできる。一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、プログラム記録媒体からインストールされる。
【0126】
なお、本明細書において、プログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0127】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0128】
なお、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0129】
1 入力システム, 10 テレビジョン受像機, 11 アンテナ, 12 受信部, 13 MPU, 15 ビデオRAM, 16 出力部, 21 アイコン, 22 ポインタ, 52 MPU, 58 角速度センサー, 59 加速度センサー, 101 フラグ検出部, 102 検出値取り込み部, 103 対応値演算部, 104 対応値送信部, 121 対応値受信部, 122 対応値記憶部, 123 フラグ設定部, 124 対応値送信部, 201 取り込み指示受信部, 202 検出値取り込み部, 203 対応値演算部, 204 対応値送信部204, 241 検出値取り込み指示部, 242 対応値受信部, 243 対応値記憶部, 244 対応値送信部
【技術分野】
【0001】
本発明は入力装置および方法、並びにプログラムに関し、特に、電波によるノイズの検出を防止するようにした入力装置および方法、並びにプログラムに関する。
【背景技術】
【0002】
一般的に、パーソナルコンピュータに付属しているマウスは机上で操作される。ユーザーがマウスを机上で操作すると、その相対的動きが検出され、その動きに対応する方向にポインタが移動表示される。しかし、このようなマウスは、操作のための平面が必要となり、使用環境が制限される。
【0003】
そこで、ユーザーに、3次元の自由空間で任意の方向にマウスを操作させ、その操作された方向にポインタを移動させることも提案されている(例えば特許文献1)。
【0004】
マウスを自由空間で操作させたとしても、その操作信号を信号ラインを介してパーソナルコンピュータに伝送したのでは、やはり使用環境が制限される。そこで操作信号を無線で伝送することが考えられる。
【0005】
赤外線により操作信号を伝送すれば、信号ラインは不要となる。しかし赤外線は指向性があるため、自由空間で任意の方向に操作されるマウスからパーソナルコンピュータの方向に操作信号を伝送することは困難である。
【0006】
また、赤外線を発生する複数のLED(Light Emitting Diode)を多方向に向けて配置することも考えられる。しかし、そのようにすると、消費電力が大きくなり、マウスが大型化し、コスト高となる。また伝送ビットレートが低く、XY座標をリアルタイムで伝送することが困難である。
【0007】
そこでマウスから、その操作信号を電波でパーソナルコンピュータに伝送することが考えられる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特公平6−7371号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
マウスを自由空間で3次元的に操作させる場合、角速度センサーや加速度センサーなどの慣性センサーがマウス内に収容される。このときマウスから操作信号として伝送した電波が、マウスに内蔵されている慣性センサーに対する電波ノイズとなり、検出信号に大きなノイズが乗ってしまうことがある。例えば角速度センサーには、微弱なコリオリ力を検出するため、検出信号を数百倍乃至数千倍に増幅する増幅器を含むICが内蔵されていて、外部からの電波の影響が大きい場合、信号成分だけをフィルタにより抽出することは困難である。
【0010】
また上記のようなマウスでも、今後小型化が進むと考えられるが、そのような場合にどうしてもアンテナと角速度センサーを充分離して配置することが難しくなり、更に電波ノイズの影響は大きくなってしまう。
【0011】
本発明は、このような状況に鑑みてなされたものであり、電波によるノイズの検出を防止することができるようにするものである。
【課題を解決するための手段】
【0012】
本発明の一側面は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部と、操作部の操作により、画像の動きに対応する対応値を生成するための検出値を検出する検出部と、検出部で検出された検出値から、対応値を演算する演算部と、演算部が演算した対応値を電子機器に電波で送信する送信部と、検出部が検出した検出値を、対応値が電波で電子機器に送信されていない期間に、検出部から取り込む取り込み部とを備える入力装置である。
【0013】
本発明の一側面においては、操作部は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される。検出部は、操作部の操作により、画像の動きに対応する対応値を生成するための検出値を検出する。取り込み部は、検出部が検出した検出値を、対応値が電波で電子機器に送信されていない期間に、検出部から取り込む。演算部は、検出部で検出された検出値から、対応値を演算する。送信部は、演算部が演算した対応値を電子機器に電波で送信する。
【発明の効果】
【0014】
以上のように、本発明の一側面によれば、電波によるノイズの検出を防止することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の入力システムの構成を示すブロック図である。
【図2】入力装置の外観の構成を示す斜視図である。
【図3】入力装置の内部の構成を示す図である。
【図4】センサー基板の構成を示す斜視図である。
【図5】入力装置の使用状態を示す図である。
【図6】入力装置の電気的構成を示すブロック図である。
【図7】MPUの機能的構成を示すブロック図である。
【図8】MPUの機能的構成を示すブロック図である。
【図9】MPUのデータ取り込み処理を説明するフローチャートである。
【図10】MPUの通信処理を説明するフローチャートである。
【図11】対応値演算部の機能的構成を示すブロック図である。
【図12】対応値演算処理を説明するフローチャートである。
【図13】MPUの機能的構成を示すブロック図である。
【図14】MPUの機能的構成を示すブロック図である。
【図15】MPUの通信処理とデータ取り込み処理を説明するフローチャートである。
【発明を実施するための形態】
【0016】
以下、発明を実施するための最良の形態(以下、実施の形態と称する)について説明する。なお、説明は以下の順序で行う。
1.第1の実施の形態(システムの構成)
2.第1の実施の形態(入力装置の構成)
3.第1の実施の形態(入力装置の電気的構成)
4.第1の実施の形態(入力装置のMPUの機能的構成)
5.第1の実施の形態(入力装置の動作)
6.第1の実施の形態(対応値演算処理)
7.第2の実施の形態(入力装置のMPUの機能的構成)
8.第2の実施の形態(入力装置の動作)
9.変形例
【0017】
<1.第1の実施の形態>
[システムの構成]
【0018】
図1は、本発明の入力システムの一実施の形態の構成を表している。
【0019】
この入力システム1は、制御対象の電子機器としてのテレビジョン受像機10と、それを遠隔制御するポインティングデバイスあるいはリモートコントローラとしての入力装置31とにより構成されている。
【0020】
テレビジョン受像機10は、アンテナ11、受信部12、MPU(Micro Processing Unit)13、復調部14、ビデオRAM(Random Access Memory)15、および出力部16により構成されている。
【0021】
アンテナ11は、入力装置31からの電波を受信する。受信部12は、アンテナ11を介して受信した電波を復調し、MPU13に出力する。MPU13は、入力装置31からの指示に基づいて各部を制御する。
【0022】
復調部14は、図示せぬアンテナを介して受信されたテレビジョン放送信号を復調し、ビデオ信号をビデオRAM15に出力し、オーディオ信号を出力部16に出力する。ビデオRAM15は、復調部14から供給されたビデオ信号に基づく画像と、MPU13からのポインタ、アイコンなどのオンスクリーンデータの画像とを合成し、出力部16の画像表示部に出力する。出力部16は、画像表示部で画像を表示するほか、スピーカなどで構成される音声出力部から、ビデオ信号に対応する音声信号の音声や、MPU13から供給される音声を出力する。
【0023】
図1の表示例においては、出力部16の画像表示部に、アイコン21とポインタ22が表示されている。入力装置31はポインタ22の表示位置を変更する場合の他、テレビジョン受像機10を遠隔制御する場合にユーザーにより操作される。
【0024】
[入力装置の構成]
【0025】
図2は、入力装置31の外観の構成を表している。入力装置31は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部としての本体32を有している。本体32の上面には、ボタン33,34が、右側面には、ジョグダイヤル35が、それぞれ設けられている。
【0026】
図3は、入力装置31の本体32の内部の構成を表している。入力装置31の内部には、メイン基板51、センサー基板57、および電池56が収容されている。メイン基板51には、MPU52、水晶発振器53、送信部54、およびアンテナ55が取り付けられている。
【0027】
図4に拡大して示されるように、センサー基板57には、MEMS(Micro Electro Mechanical Systems)の技術により製造された、角速度センサー58と加速度センサー59が取り付けられている。センサー基板57は、慣性センサーである角度センサー58と加速度センサー59の直交する2つの感度軸であるX軸とY軸に平行とされている。
【0028】
本体32の先頭(図5における左方向の端部)を、典型的にはその先に位置するテレビジョン受像機10(図5には示されていないが左方向に位置する)に向けた状態で、本体32の全体がユーザーにより、例えば図5に示される任意の方向D1や方向D2に操作された場合、2軸式振動型角速度センサーで構成される角速度センサー58は、それぞれX軸とY軸と平行なピッチ回転軸71とヨー回転軸72を中心として回転するピッチ角とヨー角の角速度を検出する。加速度センサー59は、X軸およびY軸の方向の加速度を検出する。加速度センサー59は、センサー基板57を感度平面として、重力加速度をベクトル量として検知することができる。加速度センサー59としては、X軸、Y軸、およびZ軸の3軸を感度軸とする3軸型加速度センサーを用いることもできる。
【0029】
2本の電池56は各部に必要な電力を供給する。
【0030】
図5は、入力装置31の使用状態を表している。同図に示されるように、入力装置31はユーザーが手81で保持し、入力装置31の全体を3次元の自由空間において任意の方向に操作する。入力装置31はその操作された方向を検出し、その操作された方向の操作信号を出力する。また入力装置31は、ボタン33,34や、ジョグダイヤル35などのボタンが操作された場合、その操作信号を出力する。
【0031】
ボタン33は、通常の平面上で操作されるマウスの左ボタンに対応し、ボタン34は右ボタンに対応する。ボタン33は人指し指で、ボタン34は中指で、ジョグダイヤル35は親指で、それぞれ操作される。ボタンが操作されたとき発行されるコマンドは任意であるが、例えば次のように設定することができる。
【0032】
ボタン33の1回押し:左クリック:選択
ボタン33の長押し:ドラッグ:アイコンの移動
ボタン33の2度押し:ダブルクリック:ファイル、フォルダを開く、プログラムを実行する
ボタン34を1回押す:右クリック:メニューの表示
ジョグダイヤルを回す:スクロール
ジョグダイヤルを押す:決定
【0033】
このように設定すれば、ユーザーは、平面上で操作されるマウスと同様の操作感覚で入力装置31を使用することができる。
【0034】
ボタン33は2段スイッチとすることもできる。この場合、1段目のスイッチが操作されたとき、または押圧されたままの状態にされたとき、入力装置31の移動を表す操作信号が出力され、2段目のスイッチが操作されたとき選択される。勿論、専用のボタンを設け、そのボタンが操作されたとき、移動を表す操作信号が出力されるようにすることもできる。
【0035】
[入力装置の電気的構成]
【0036】
図6は、入力装置31の電気的構成を表している。
【0037】
DC/DCコンバータ81は、電池56からの電圧を所定の電圧に変換して、電源ライン82を介して出力する。この電力はスイッチ83,84を介して角速度センサー58と加速度センサー59に供給されている。また電力はMPU52を構成するMPU52A,52Bと、通信部85にも供給されている。
【0038】
MPU52を構成する2つの独立したMPUのうちの一方のMPU52Bは、ボタン33,34や、ジョグダイヤル35からの信号、並びに角速度センサー58、加速度センサー59の検出信号、スイッチ83,84の情報などを加工し、その加工信号を通信ライン87を介してMPU52Aに出力する。
【0039】
MPU52を構成する2つの独立したMPUのうちの他方のMPU52Aは、入力装置31全体の動作の制御を行う他、テレビジョン受像機10との間の通信の制御を行う。通信部85はMPU52Aにより制御され、アンテナ86を介してテレビジョン受像機10と電波で通信する。MPU52AとMPU52Bは通信ライン87により接続されている。
【0040】
このようにMPU52を2個に分けることで、迅速な処理が可能になる。また、ユーザーからの要望により、無線通信方式として、ブルートゥース、Zigbee、2.4GHz帯独自規格などの異なる方式が採用されたとしても、ポインタの制御用のMPUは共通にすることができるので、開発期間を短くすることができ、全体としてコスト的に有利となる。
【0041】
[入力装置のMPUの機能的構成]
【0042】
図7と図8は、内蔵するメモリに記憶されているプログラムに従って動作するMPU52BとMPU52Aの機能的構成を表している。
【0043】
MPU52Bは、図7に示されるように、フラグ検出部101、検出値取り込み部102、対応値演算部103、および対応値送信部104を有している。
【0044】
フラグ検出部101は、図8を参照して後述するMPU52Aのフラグ設定部123により設定されるフラグを検出する。検出値取り込み部102は、角速度センサー58と加速度センサー59からの検出値を取り込む。対応値演算部103は、検出値に対応する対応値を演算する。送信部104は、対応値をMPU52Aに送信する。
【0045】
MPU52Aは、図8に示されるように、対応値受信部121、対応値記憶部122、フラグ設定部123、および対応値送信部124を有している。
【0046】
対応値受信部121は、MPU52Bから通信ライン87を介して送信されてくる対応値を受信する。対応値記憶部122は、対応値受信部221により受信された対応値を記憶する。フラグ設定部123は、対応値をテレビジョン受像機10に電波で送信中であることを表すフラグを管理する。対応値送信部124は、対応値の電波によるテレビジョン受像機10への送信を管理する。
【0047】
[入力装置の動作]
【0048】
次に図9と図10を参照して、入力装置31が操作された場合に、その操作信号がテレビジョン受像機10に送信される処理について説明する。
【0049】
テレビジョン受像機10の出力部16に表示されているポインタ22を所定の方向に移動させるために、ユーザーが本体32を手で保持して、2段スイッチのボタン33の1段目を操作するか、押圧したままの状態にして、入力装置31の全体を任意の所定の方向に操作した場合、すなわち、3次元の自由空間において、入力装置31の全体が任意の方向に動かされた場合、MPU52Bは図9のフローチャートに示されるデータ取り込み処理を実行する。
【0050】
すなわち、ステップS1においてMPU52Bのフラグ検出部101は、フラグを検出する。図10を参照して後述するように、MPU52Aは通信部85からアンテナ86を介して無線で操作信号をテレビジョン受像機10に送信している期間中、フラグをセットする。このフラグが検出される。
【0051】
ステップS2において検出値取り込み部102は、フラグがセットされているかを判定する。ステップS1で検出されたフラグがセットされていると判定された場合、処理はステップS1に戻り、それ以降の処理が繰り返される。すなわち、この場合、MPU52Aが操作信号を電波でテレビジョン受像機10に送信しているので、後述するステップS3乃至ステップS5の処理は実行されない。つまり、センサーからの検出値の取り込みは禁止される。
【0052】
ステップS1で検出されたフラグがセットされていないと判定された場合、MPU52Aは操作信号を電波でテレビジョン受像機10に送信していない。そこでステップS3において検出値取り込み部102は、検出部としての角速度センサー58と加速度センサー59が検出する検出値を取り込む。すなわち、画像表示部の画面としてのポインタ22の動きに対応する対応値を生成するための検出値が取り込まれる。具体的には、角速度センサー58の検出値と加速度センサー59の検出値が、MPU52Bに内蔵されるA/D変換部によりそれぞれA/D変換され、取り込まれる。
【0053】
ステップS4において対応値演算部103は、対応値を演算する。その詳細は図12を参照して後述するが、これによりステップS3で取り込まれた検出値に対応する対応値が演算される。
【0054】
ステップS5において対応値送信部104は、対応値を送信する。すなわち、ステップS4で演算された対応値が、通信ライン87を介してMPU52Aに送信される。
【0055】
角度変化により生じるコリオリ力は微弱なので、角速度センサー58はコリオリ力の検知信号を数百倍乃至数千倍に増幅して出力するための増幅器のICを内蔵している。試験の結果、角速度センサーは電波ノイズの影響を受けやすいのもが多かった。その結果、テレビジョン受像機10に向けて送信されている電波が角速度センサー58により受信されると、角速度センサー58の出力のレベルが、限度にまで達することがあった。このように操作信号の電波が受信された状態では、コリオリ力、すなわち角速度を正確に検出することが困難になる。
【0056】
そこでこの実施の形態の場合、上述したように、電波の発生期間においては、角速度センサー58の検出値の取り込みは禁止され、電波が発生されていない期間においてのみ、角速度センサー58の検出値の取り込みが行われる。従って、電波によるノイズの影響を受けずに、角速度の正確な検出が可能となる。
【0057】
加速度センサー59が電波による影響をそれ程受けない場合、加速度センサー59の検出値は、電波の送信中においても取り込むようにしてもよい。しかし、角速度センサー58との検出タイミングを一致させるため、本実施の形態においては加速度センサー59の検出値の取り込みも、電波の送信中は禁止させる。
【0058】
このようなMPU52Bの処理に対応して、MPU52Aは、図10のフローチャートに示されるような処理を実行する。
【0059】
ステップS31において、MPU52Aの対応値受信部121は、MPU52Bから通信ライン87を介して送信されてきた対応値を受信する。ステップS32において対応値記憶部122は、ステップS31で受信された対応値を記憶する。ステップS33においてフラグ設定部123は、フラグをセットする。フラグがセットされた後、対応値送信部124はステップS34において、対応値を送信する。すなわち、通信部85は、対応値記憶部122に一旦記憶された対応値を変調し、アンテナ86を介して、電波でテレビジョン受像機10に向けて送信する。
【0060】
テレビジョン受像機10においては、この電波がアンテナ11を介して受信部12により受信され、復調されて、MPU13に供給される。MPU13は受信した対応値に基づいて、ビデオRAM15に所定の画像データを描画し、出力部16において、ポインタ22を、入力装置31の操作に対応する位置に移動、表示させる。
【0061】
この実施の形態の場合、上述したように、入力装置31の操作速度(Vx,Vy)が対応値とされる。テレビジョン受像機10においては、次式に従ってポインタ22の座標値が生成される。
X(t)=X(t−1)+Vx
Y(t)=Y(t−1)+Vy (1)
【0062】
すなわち、前回の座標(X(t−1),Y(t−1))に、画像表示部の画面上に表示される画像であるポインタ22の動きに対応する対応値としての速度(Vx,Vy)を加算することで、新たな座標値が演算される。生成された座標値にポインタ22が表示されるように制御される。
【0063】
対応値の送信が完了したとき、ステップS35において、フラグ設定部123は、ステップS33でセットしたフラグをリセットする。このように、フラグは電波が送信されている期間にはセットされ、電波が送信されていない期間にはリセットされる。
【0064】
以上のような処理を繰り返すことで、対応値は断続的にテレビジョン受像機10に電波で送信される。ここでは、例えば、Bluetooth(登録商標)やZigbee(登録商標)などの規格に基づくパケット通信を利用することができる。
【0065】
このように、この実施の形態においては、MPU52Bは、MPU52Aが対応値を電波で送信している期間をフラグに基づき検出し、その期間においては、検出値を取り込まないように、検出値の取り込みタイミングを管理する。従って、対応値の電波による送信中に検出値が取り込まれることがないので、センサーが電波によるノイズを、入力装置31の操作と誤検出することが防止される。この効果は、入力装置31を小型化し、センサーとアンテナの距離が短くなった場合に特に顕著となる。
【0066】
なお、以上においては、対応値が電波で送信されている期間、フラグがセットされるようにしたが、さらに入力装置31の各種のボタンが操作されている期間においても、フラグがセットされるようにしてもよい。そのようにすれば、電波によるノイズを、入力装置31の操作と誤検出することが、さらに確実に防止される。
【0067】
以上のように、図9と図10の実施の形態の場合、MPU52AとMPU52Bは非同期で動作することができる。従って、設計の自由度が高くなる。
【0068】
[対応値演算処理]
【0069】
次に、図9のステップS4において実行される対応値演算処理の詳細について説明する。この処理を実行するため、対応値演算部103は、図11に示されるような機能的構成を有している。
【0070】
対応値演算部103は、変化率演算部161、判定部162、半径演算部163、低域成分抽出部164、半径記憶部165、半径読み出し部166、および速度演算部167を有している。
【0071】
変化率演算部161は、加速度の変化率や角加速度の変化率を演算する。判定部162は、各種の判定処理を実行する。半径演算部163は、入力装置31が操作されたときの回転半径を演算する。低域成分抽出部164は、データの低域成分を抽出する。半径記憶部165は、演算された回転半径を記憶する。半径読み出し部166は、記憶された回転半径を読み出す。速度演算部167は、速度を演算する。
【0072】
次に、図12を参照して、対応値演算処理の詳細について説明する。
【0073】
最初に、速度演算の原理について説明する。
【0074】
入力装置31の速度は角速度に回転半径を乗算することで求められる。すなわち、ユーザーが入力装置31を操作した場合の入力装置31の運動は、ユーザーの肩、肘、または手首などを中心とした回転運動を合成したものとなる。そしてその回転半径は合成された回転運動の時間毎に変化する回転中心から入力装置31までの距離となる。
【0075】
入力装置31の速度を(Vx,Vy)、角速度を(ωx,ωy)とすると、回転半径(Rx,Ry)は次式で表される。
(Rx,Ry)=(Vx,Vy)/(ωx,ωy)・・・(2)
【0076】
式(2)の右辺の(Vx,Vy),(ωx,ωy)は、速度のディメンジョンである。この式(2)の右辺に表されている速度と角速度とがそれぞれ微分され、加速度、あるいは加速度の時間変化率のディメンジョンとされても相関関係は失われない。同様に、速度と角速度とがそれぞれ積分され、変位のディメンジョンとされても相関関係は失われない。
【0077】
従って、式(2)の右辺に表されている速度および角速度をそれぞれ変位、加速度、加速度の時間変化率のディメンジョンとして、以下の式(3)乃至式(5)が得られる。
(Rx,Ry)=(x,y)/(ψ,θ)・・・(3)
(Rx,Ry)=(ax,ay)/(Δωx,Δωy)・・・(4)
(Rx,Ry)=(Δax,Δay)/(Δ(Δωx),Δ(Δωy))
・・・(5)
【0078】
上記式のうち、例えば式(5)に注目すると、加速度(ax,ay)の変化率(Δax,Δay)と、角加速度(Δωx,Δωy)の変化率(Δ(Δωx),Δ(Δωy))が既知であれば、回転半径(Rx,Ry)を求められることが分かる。この実施の形態においては、式(5)に基づいて半径(Rx,Ry)が求められる。
【0079】
図12のステップS51において、微分フィルタとしての機能を有する変化率演算部161は、図9のステップS3で、加速度センサー59から取り込まれた検出値としての加速度(ax,ay)を微分して、加速度の変化率(Δax,Δay)を演算する。またステップS52において変化率演算部161は、図9のステップS3で、角速度センサー58から取り込まれた検出値としての角速度(ωx,ωy)を2階微分して、角加速度(Δωx,Δωy)の変化率(Δ(Δωx),Δ(Δωy))を演算する。
【0080】
ステップS51で加速度(ax,ay)の変化率(Δax,Δay)を算出する理由は、後述するステップS54で回転半径を求めるための他、加速度センサー59に対する重力加速度の影響を軽減するためである。
【0081】
すなわち、加速度センサー59が検出する加速度は、ユーザーが入力装置31を操作することで発生する慣性力による加速度と、重力による加速度を合成した加速度である。ただし、重力による加速度の変化率は、慣性力による加速度の変化率の約1/10程度の大きさであり、また重力による加速度と慣性力による加速度は、それらの周波数成分が異なっている。
【0082】
慣性力による加速度の周波数に比べて、重力による加速度の周波数の方が低い。微分演算は、ハイパスフィルタ特性を有するので、そのカットオフ周波数を、重力による加速度の周波数と慣性力による加速度の周波数の間の周波数に設定しておくことで、慣性力による加速度は通過させ、重力による加速度を減衰させることができる。従って、ステップS51の処理により得られる加速度(ax,ay)の変化率(Δax,Δay)は、重力による加速度の変化率の成分が減衰された、ほとんど慣性力による加速度の変化率となる。
【0083】
その結果、後述するステップS54で回転半径Ryが算出される際に、入力装置31の姿勢変化による傾き成分の加速度が反映され難くなる。従って、その回転半径Ryに基づいて算出される速度も、入力装置31の姿勢変化による傾き成分の加速度の影響を受け難くなる。これにより、入力装置31の姿勢変化による重力の影響が軽減される。
【0084】
なお、カットオフ周波数は、入力装置31の重力による加速度の周波数、および入力装置31の慣性力の加速度の周波数を考慮して、適宜設定される。また、このカットオフ周波数は、加速度センサー59の温度ドリフトによる低周波成分やDCオフセット値を考慮して設定するようにしてもよい。つまり、重力加速度の成分を含む低周波成分は、重力加速度の成分のほか、例えば温度ドリフトによる低周波成分やDCオフセット成分を含む場合もある。
【0085】
次にX軸方向の速度Vxを求める処理が行われる。すなわち、ステップS53において判定部162は、ステップS52で演算された、Y軸回りの角加速度変化率の絶対値|Δ(Δωy)|が、閾値Th1を超えるかを判定する。
【0086】
このように閾値判定が行われるのは、角加速度変化率(Δ(Δωx)),Δ(Δωy))は、角速度(ωx,ωy)の2階微分演算により算出されるからである。つまり、角速度(ωx,ωy)にノイズが生じていると、高周波数のノイズが、2階の微分演算により拡大してしまい、高周波数のノイズが拡大された状態で、角加速度変化率が算出される。その結果、角加速度変化率に基づいて算出される回転半径(Rx,Ry)、およびこの回転半径に基づいて算出される速度(Vx,Vy)がノイズに影響され、正確な回転半径、および速度を算出することが困難になる。特に、角加速度変化率の絶対値(|Δ(Δωx)|,|Δ(Δωy)|)が小さいほど、回転半径および速度へのノイズの影響が相対的に増大する。
【0087】
そこで、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1より大きい場合、つまり、ノイズの影響が小さい場合、ステップS54において半径演算部163は、ステップS52で演算された角加速度変化率Δ(Δωy)を用いて、回転半径Ryを次式に従って演算する。
Ry=Δax/Δ(Δωy) (6)
【0088】
ステップS55において低域成分抽出部164は、回転半径の信号Ryの低域成分を抽出する。これにより、高い周波数のノイズによる影響をさらに軽減することができる。この低域成分の抽出するローパスフィルタとしての処理は、信号の遅延を発生させるが、回転半径は急激に変化することがないため、その影響は比較的少ない。
【0089】
このローパスフィルタとしてのカットオフ周波数は、上記したようにステップS52で行われる演算により、高い周波数のノイズが発生する可能性があるため、そのノイズが減衰あるいは除去されるような周波数に適宜設定される。また、このローパスフィルタ、回転半径の信号が通過する際の応答遅れが最小となるように設計される。
【0090】
ステップS56において半径記憶部165は、ステップS54で演算され、ステップS55で低域成分が抽出された回転半径Ryを記憶する。
【0091】
一方、ステップS53において、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1以下であると判定された場合、つまり、ノイズの影響が大きい場合、ステップS54乃至ステップS56の処理は実行されない。その代わりに、ステップS57において半径読み出し部166は、ステップS56で前回記憶された回転半径Ryを読み出す。
【0092】
ステップS56またはステップS57の処理の後、ステップS58において速度演算部167は、次式に従って操作信号としての速度Vxを演算する。
Vx=Ry・ωy (7)
【0093】
この速度演算には、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1より大きい場合、すなわち、ノイズの影響が小さい場合、その絶対値が閾値Th1より大きい角加速度変化率|Δ(Δωy)|を用いてステップS53で演算された回転半径Ryが用いられる。しかし、角加速度変化率の絶対値|Δ(Δωy)|が閾値Th1以下である場合、すなわち、ノイズの影響が大きい場合、上記式の速度演算には、前回記憶された回転半径Ryが用いられる。
【0094】
同様の処理が、Y軸方向の速度Vyを求める場合にも実行される。
【0095】
すなわち、ステップS59において判定部162は、ステップS52で演算された、X軸回りの角加速度変化率の絶対値|Δ(Δωx)|が、閾値Th1を超えるかを判定する。
【0096】
角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1より大きい場合、つまり、ノイズの影響が小さい場合、ステップS60において半径演算部163は、ステップS52で演算された角加速度変化率Δ(Δωx)を用いて、回転半径Rxを次式に従って演算する。
Rx=Δay/Δ(Δωx) (8)
【0097】
ステップS61において低域成分抽出部164は、回転半径の信号Rxの低域成分を抽出する。これにより、高い周波数のノイズによる影響をさらに軽減することができる。
【0098】
このローパスフィルタとしてのカットオフ周波数は、上記したようにステップS52で行われる演算により、高い周波数のノイズが発生する可能性があるため、そのノイズが減衰あるいは除去されるような周波数に適宜設定される。また、このローパスフィルタ、回転半径の信号が通過する際の応答遅れが最小となるように設計される。
【0099】
ステップS62において半径記憶部165は、ステップS60で演算され、ステップS61で低域成分が抽出された回転半径Rxを記憶する。
【0100】
ステップS59において、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1以下であると判定された場合、つまり、ノイズの影響が大きい場合、ステップS60乃至ステップS62の処理は実行されない。その代わりに、ステップS63において半径読み出し部166は、ステップS62で前回記憶された回転半径Rxを読み出す。
【0101】
ステップS62またはステップS63の処理の後、ステップS64において速度演算部167は、次式に従って操作信号としての速度Vxを演算する。
Vy=Rx・ωx (9)
【0102】
この速度演算には、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1より大きい場合、すなわち、ノイズの影響が小さい場合、絶対値が閾値Th1より大きい角加速度変化率|Δ(Δωx)|を用いてステップS59で演算された回転半径Rxが用いられる。しかし、角加速度変化率の絶対値|Δ(Δωx)|が閾値Th1以下である場合、すなわち、ノイズの影響が大きい場合、上記式の速度演算には、前回記憶された回転半径Rxが用いられる。
【0103】
以上のようにして求められた速度(Vx,Vy)が、上述したように対応値としてMPU52Aに送信される。
【0104】
なお、本実施の形態では、ヨー方向およびピッチ方向の両方向について閾値を同じ値Th1としたが、両方向で異なる閾値が用いられてもよい。また、ステップS53乃至ステップS58の処理と、ステップS59乃至ステップS64の処理は、平行して実行させることができる。
【0105】
<2.第2の実施の形態>
[入力装置のMPUの機能的構成]
【0106】
MPU52BとMPU52Aを同期して動作させることもできる。この場合、MPU52BとMPU52Aは、それぞれ図13と図14に示されるような機能的構成を有する。
【0107】
MPU52Bは、図13に示されるように、取り込み指示受信部201、検出値取り込み部202、対応値演算部203、および対応値送信部204を有する。
【0108】
取り込み指示受信部201は、MPU52Aからの取り込み指示を受信する。検出値取り込み部202は、角速度センサー58と加速度センサー59からの検出値を取り込む。対応値演算部203は、検出値に対応する対応値を演算する。対応値送信部204は、対応値をMPU52Aに送信する。
【0109】
MPU52Aは、図14に示されるように、対応値取り込み指示部241、対応値受信部242、対応値記憶部243、および対応値送信部244を有する。
【0110】
検出値取り込み指示部241は、MPU52Bに対して検出値の取り込みを指示する。対応値受信部242は、MPU52Bからの対応値を受信する。対応値記憶部243は、対応値を記憶する。対応値送信部244は、テレビジョン受像機10に対して対応値を送信する。
【0111】
[入力装置の動作]
【0112】
次に、図15のフローチャートを参照して、入力装置31が操作された場合に、その操作に基づく対応値がテレビジョン受像機10に送信される処理について説明する。図15においてステップS81乃至ステップS84の処理はMPU52Aにより実行され、ステップS101乃至ステップS104の処理はMPU52Bにより実行される。
【0113】
テレビジョン受像機10の出力部16に表示されているポインタ22を所定の方向に移動させるために、ユーザーが本体32を手で保持して、ボタン33を2段操作するか、押圧したままの状態にして、入力装置31の全体を任意の所定の方向に操作した場合、すなわち、3次元の自由空間において、入力装置31の全体が任意の方向に動かされた場合、MPU52Aは図15のフローチャートに示される通信処理を実行する。
【0114】
ステップS81においてMPU52Aの検出値取り込み指示部241は、検出値の取り込みを指示する。この指示は、通信ライン87を介してMPU52Bに送信される。
【0115】
ステップS101にいて、MPU52Bの取り込み指示受信部201は、MPU52Aからの取り込み指示を受信する。ステップS102において、検出値取り込み部202は検出値を取り込む。すなわち、角速度センサー58と加速度センサー59の検出値が取り込まれる。ステップS103において対応値演算部203は、対応値演算処理を実行し、検出値に対応する対応値を演算する。この処理の詳細は図12を参照して説明した通りである。
【0116】
ステップS104において対応値送信部204は、対応値を送信する。すなわち、ステップS103で演算された対応値が、通信ライン87を介してMPU52Aに送信される。
【0117】
ステップS82において、MPU52Aの対応値受信部242は、対応値を受信する。すなわち、MPU52Bから送信されてきた対応値が受信される。ステップS83において対応値記憶部243は、受信された対応値を記憶する。ステップS84においてMPU52Aの対応値送信部244は、対応値を送信する。すなわち、ステップS82で受信され、ステップS83で一旦記憶された対応値が、通信部85により変調され、アンテナ86を介して、電波でテレビジョン受像機10に送信される。
【0118】
テレビジョン受像機10においては、この電波がアンテナ11を介して受信部12により受信され、復調されて、MPU13に供給される。MPU13は受信した操作信号に対応して、ビデオRAM15に所定の画像データを描画し、出力部16において、ポインタ22を、入力装置31の操作に対応する位置に移動、表示させる。
【0119】
テレビジョン受像機10においては、図10を参照して説明した場合と同様に、対応値としての速度に基づいて、式(1)に従って、ポインタ22の新たな座標が演算される。そして、その新たな位置にポインタ22が移動表示される。
【0120】
このように、この実施の形態においては、MPU52Aが対応値を電波で送信している期間は、検出値が取り込まれないように、MPU52Bの検出値の取り込みタイミングを管理する。従って、電波の送信中に検出値が取り込まれることがなく、センサーが電波によるノイズを、入力装置31の操作と誤検出することが防止される。この場合においても、その効果は、入力装置31を小型化し、センサーとアンテナの距離が短くなった場合に特に顕著となる。
【0121】
[変形例]
【0122】
以上においては、入力装置31により操作される電子機器を、テレビジョン受像機10としたが、パーソナルコンピュータ、携帯電話機、PDA(Personal Digital Assistants)その他の電子機器を制御する場合にも本発明は適用することができる。入力装置31は、これらの電子機器に着脱可能とされ、装着された場合、電子機器と一体化して使用されるようにすることもできる。
【0123】
また、本発明は3次元空間マウスに限らず、静電容量方式のタッチパッドのように電波の影響を受けやすいデバイスを用いて、画面上のポインタを移動させるための情報を、電波で電子機器に送信する入力装置に適用しても有効である。
【0124】
加速度センサー59により入力装置31の傾きを検出し、その傾きから対応値を演算することもできる。またセンサーとして、慣性センサーではない地磁気センサーを用いることも可能である。
【0125】
上述した一連の処理は、ハードウエアにより実行させることもできるし、ソフトウエアにより実行させることもできる。一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、プログラム記録媒体からインストールされる。
【0126】
なお、本明細書において、プログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0127】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0128】
なお、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0129】
1 入力システム, 10 テレビジョン受像機, 11 アンテナ, 12 受信部, 13 MPU, 15 ビデオRAM, 16 出力部, 21 アイコン, 22 ポインタ, 52 MPU, 58 角速度センサー, 59 加速度センサー, 101 フラグ検出部, 102 検出値取り込み部, 103 対応値演算部, 104 対応値送信部, 121 対応値受信部, 122 対応値記憶部, 123 フラグ設定部, 124 対応値送信部, 201 取り込み指示受信部, 202 検出値取り込み部, 203 対応値演算部, 204 対応値送信部204, 241 検出値取り込み指示部, 242 対応値受信部, 243 対応値記憶部, 244 対応値送信部
【特許請求の範囲】
【請求項1】
電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部と、
前記操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出する検出部と、
前記検出部で検出された前記検出値から、前記対応値を演算する演算部と、
前記演算部が演算した前記対応値を前記電子機器に電波で送信する送信部と、
前記検出部が検出した前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に、前記検出部から取り込む取り込み部と
を備える入力装置。
【請求項2】
前記検出部は、慣性センサーである
請求項1に記載の入力装置。
【請求項3】
前記慣性センサーは、角速度センサーである
請求項2に記載の入力装置。
【請求項4】
前記電波の送信中であることを表すフラグを設定する設定部をさらに備え、
前記取り込み部は、前記フラグが設定されていないとき、前記検出部からの取り込みを行う
請求項2に記載の入力装置。
【請求項5】
前記検出部からの取り込みを指示する指示部をさらに備え、
前記取り込み部は、前記指示がなされたとき、前記検出部からの取り込みを行う
請求項2に記載の入力装置。
【請求項6】
前記操作部は、前記入力装置全体である
請求項2に記載の入力装置。
【請求項7】
前記入力装置全体は、3次元空間で操作される
請求項6に記載の入力装置。
【請求項8】
前記入力装置は前記電子機器に着脱可能とされ、前記電子機器に装着された場合、前記電子機器と一体化して使用される
請求項6に記載の入力装置。
【請求項9】
前記入力装置は前記ユーザーにより操作されるボタンをさらに有し、
前記取り込み部は、さらに前記ボタンが操作されたときの操作信号が電波で前記電子機器に送信されていない期間に、前記検出部が検出した前記検出値を前記検出部から取り込む
請求項6に記載の入力装置。
【請求項10】
操作部と、
検出部と、
取り込み部と、
演算部と、
送信部と、
を備え、
前記操作部は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作され、
前記検出部は、前記操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出し、
前記取り込み部は、前記検出部が検出した前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に、前記検出部から取り込み、
前記演算部は、前記検出部で検出された前記検出値から、前記対応値を演算し、
前記送信部は、前記演算部が演算した前記対応値を前記電子機器に電波で送信する
入力方法。
【請求項11】
入力装置のコンピュータに、
電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためのユーザーによる操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出する手順と、
検出された前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に取り込む手順と、
検出された前記検出値から、前記対応値を演算する手順と、
演算された前記対応値を前記電子機器に電波で送信する手順と
を実行させるためのプログラム。
【請求項1】
電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作される操作部と、
前記操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出する検出部と、
前記検出部で検出された前記検出値から、前記対応値を演算する演算部と、
前記演算部が演算した前記対応値を前記電子機器に電波で送信する送信部と、
前記検出部が検出した前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に、前記検出部から取り込む取り込み部と
を備える入力装置。
【請求項2】
前記検出部は、慣性センサーである
請求項1に記載の入力装置。
【請求項3】
前記慣性センサーは、角速度センサーである
請求項2に記載の入力装置。
【請求項4】
前記電波の送信中であることを表すフラグを設定する設定部をさらに備え、
前記取り込み部は、前記フラグが設定されていないとき、前記検出部からの取り込みを行う
請求項2に記載の入力装置。
【請求項5】
前記検出部からの取り込みを指示する指示部をさらに備え、
前記取り込み部は、前記指示がなされたとき、前記検出部からの取り込みを行う
請求項2に記載の入力装置。
【請求項6】
前記操作部は、前記入力装置全体である
請求項2に記載の入力装置。
【請求項7】
前記入力装置全体は、3次元空間で操作される
請求項6に記載の入力装置。
【請求項8】
前記入力装置は前記電子機器に着脱可能とされ、前記電子機器に装着された場合、前記電子機器と一体化して使用される
請求項6に記載の入力装置。
【請求項9】
前記入力装置は前記ユーザーにより操作されるボタンをさらに有し、
前記取り込み部は、さらに前記ボタンが操作されたときの操作信号が電波で前記電子機器に送信されていない期間に、前記検出部が検出した前記検出値を前記検出部から取り込む
請求項6に記載の入力装置。
【請求項10】
操作部と、
検出部と、
取り込み部と、
演算部と、
送信部と、
を備え、
前記操作部は、電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためにユーザーにより操作され、
前記検出部は、前記操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出し、
前記取り込み部は、前記検出部が検出した前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に、前記検出部から取り込み、
前記演算部は、前記検出部で検出された前記検出値から、前記対応値を演算し、
前記送信部は、前記演算部が演算した前記対応値を前記電子機器に電波で送信する
入力方法。
【請求項11】
入力装置のコンピュータに、
電子機器の画像表示部の画面上に表示される画像の動きに対応する対応値を生成するためのユーザーによる操作部の操作により、前記画像の動きに対応する対応値を生成するための検出値を検出する手順と、
検出された前記検出値を、前記対応値が電波で前記電子機器に送信されていない期間に取り込む手順と、
検出された前記検出値から、前記対応値を演算する手順と、
演算された前記対応値を前記電子機器に電波で送信する手順と
を実行させるためのプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】

【図12】
【図13】

【図14】
【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−160551(P2010−160551A)
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願番号】特願2009−786(P2009−786)
【出願日】平成21年1月6日(2009.1.6)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願日】平成21年1月6日(2009.1.6)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]