
入力装置
【課題】 特に、従来に比べて操作性を向上させた入力装置を提供することを目的とする。
【解決手段】 本実施形態の入力装置は、指(操作体)により操作される操作表面3と、前記操作領域(操作表面3を含む)の下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサ10と、前記操作領域の下方側に配置された発光素子22と受光素子23とを有して構成され、前記発光素子から前記操作表面に向けて発せられた光(赤外線IR1)に基づく反射光IR2を前記受光素子23で受光することにより、前記指Fの検知情報を取得することができる光検知センサ20と、を有することを特徴とする。
【解決手段】 本実施形態の入力装置は、指(操作体)により操作される操作表面3と、前記操作領域(操作表面3を含む)の下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサ10と、前記操作領域の下方側に配置された発光素子22と受光素子23とを有して構成され、前記発光素子から前記操作表面に向けて発せられた光(赤外線IR1)に基づく反射光IR2を前記受光素子23で受光することにより、前記指Fの検知情報を取得することができる光検知センサ20と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、静電容量センサを有して操作領域での操作位置を検知可能とした入力装置に関する。
【背景技術】
【0002】
特許文献1には車載用入力装置に関する発明が開示されている。車載用入力装置には、操作面の裏面側に静電容量センサが配置され、操作面を指で操作したときに指の位置を静電容量変化に基づいて検知することが可能になる。
【0003】
しかしながら、例えば、走行中に入力装置への操作を行ったとき、操作中に車体が揺れるなどして不意に指が操作面から離れると、静電容量センサが操作面から離れた指を検知できない問題があった。このように静電容量センサにて指が検知されなくなったとき、例えば途中までの入力状態がリセットされたり、入力が終了したと判断されたりしてしまうと、操作者としては、まだ操作途中との意識であるため、操作性に不満を覚える。従来では、操作を終了したから指が操作面上から無くなったのか、あるいは操作を終了していないが不意に指が操作面から離れただけなのか判別できず、すなわち操作面から指が離れたときの動作予測ができなかった。
【0004】
また例えば手袋をした状態では、静電容量センサにて操作位置を検知できず、操作のために一旦、手袋を取る必要があるなど、操作者が操作性に煩わしさを感じることがあった。
【0005】
特許文献2には、操作面を立体的に形成した入力装置が開示されているが、特許文献2の構造においても上記と同様の問題が生じる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−311306号公報
【特許文献2】特開2010−182201号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は上記従来の課題を解決するためのものであり、特に、従来に比べて操作性を向上させた入力装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明における入力装置は、
操作体により操作される操作領域と、前記操作領域から下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサと、
前記操作領域から下方側に配置された発光素子と受光素子とを有して構成され、前記発光素子から前記操作領域に向けて発せられた光に基づく反射光を前記受光素子で受光することにより、前記操作体の検知情報を取得することができる光検知センサと、を有することを特徴とするものである。
【0009】
本発明では、静電容量センサのみならず、光検知センサも用いることで、静電容量センサのみでは成し得ない検知情報を取得できる。そして本発明では、光検知センサの検知情報(操作体の操作位置の検知)を、静電容量センサの検知情報とともに用いたり、静電容量センサから検知情報が得られないような場合には、前記静電容量センサの検知情報に代えて用いることができ、これにより良好な操作性を得ることができ、また操作体の位置検知を高精度なものに出来る。例えば不意に操作体が操作領域から離れて静電容量センサでは操作体を検知できない状況でも、光検知センサにより検知することが可能である。よって操作体の検知範囲を、従来の静電容量センサのみを用いた構成に比べて広げることができ、良好な操作性を得ることができる。例えば上記のように不意に操作体が操作領域から離れてしまっても、光検知センサによる検知情報に基づいて、まだ操作中だとして操作中のモードを終了しないよう簡単に制御できる。また静電容量センサの検知情報に対して例えば光検知センサの検知情報を補完することで、操作体の高さ座標(Z検知)を補正でき、操作体の位置検知を高精度なものに出来る。
【0010】
本発明では、前記操作領域は接触、あるいは、近接操作、又は、前記接触及び近接操作を行う操作表面を有し、少なくとも前記発光素子は複数個、配置されており、前記光検知センサでは、前記操作体の前記操作表面から上方での操作位置が検知可能とされていることが好ましい。このように光検知センサでは操作体の操作表面から上方での操作位置の検知が可能であるため、例えば、静電容量センサによる操作体の検知が不能となる場合でも、光検知センサによる検知情報を用いることで、操作体の位置検知を適切に行うことが出来る。例えば手袋をしている場合、静電容量センサのみが組み込まれた従来構成では、一旦、手袋を外すことが必要であったが、本発明では、手袋をしたままでも光検知センサによる操作体の操作位置を検知でき、操作性の向上を図ることができる。
【0011】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な透光性シートと、前記透光性シートの片面あるいは両面に設けられた前記静電容量センサを構成する電極とを有し、表面が前記操作表面とされたパネル部を備え、前記パネル部の下方側に、基板上に配置された前記光検知センサが設けられていることが好ましい。これにより透光性シートを介して光検知センサでの発光・受光を適切に行うことができ、静電容量センサと光検知センサの双方を適切に配置できる。
【0012】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な透光性樹脂層が前記透光性シートに重ねて成形されていることが好ましい。
【0013】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な加飾印刷層が前記透光性シートに重ねて形成されていることが好ましい。加飾印刷層を設けることで、操作表面に色々な表示を照光させることができる。
【0014】
また本発明では、前記静電容量センサを構成する電極は、前記透光性シートに印刷形成されたものであることが好ましい。これにより、平面状態の透光性シートに前記電極を印刷した状態から適切に立体フォーミングすることができる。
【0015】
また本発明では、前記電極は、導電印刷層と、前記導電印刷層よりも低抵抗のメッキ層との積層構造で形成されることが好ましい。これにより電極抵抗の低減を図ることができる。
【0016】
また本発明では、前記操作表面は、平面部と、前記平面部と連続的に形成された凸部、あるいは前記平面部と連続的に形成された凹部、又は前記凸部及び前記凹部と、を有し、前記静電容量センサは、前記操作表面の下方側にて、前記平面部から前記凸部、あるいは前記凹部、又は前記凸部及び前記凹部の起伏に沿って形成されている構成にできる。これにより操作体により平面部を操作したときのみならず凸部あるいは凹部を操作体により操作したときの操作位置を適切に検知することができる。
【0017】
また本発明では、前記操作表面への操作に対する検知限界距離は、前記光検知センサのほうが、前記静電容量センサに比べて長いことが好ましい。これにより、前記静電容量センサの前記検知限界距離を越えた位置に前記操作体があるときの前記操作体の動作検知を、前記光検知センサの検知情報に基づいて行うことができる。
【0018】
また本発明では、前記光検知センサからの検知情報により、前記操作表面に所定の情報を表示することが好ましい。例えば、前記操作表面から離れた位置にある前記操作体が前記操作表面に所定距離近づいたことを前記光検知センサにより検知した際、前記操作表面に所定の情報を表示することができる。操作体をまだ操作表面に触れていない段階で情報を表示させることができ、また操作体が操作表面から離れても情報表示を継続させることができ、操作性を向上させることができる。
【0019】
また本発明では、前記光検知センサの前記操作体に対する検知情報を、前記静電容量センサによる前記操作体の位置検知の際に補完的に用いることができる。静電容量センサからの検知情報をメインで使用するが、静電容量センサからの検知情報が得られない場合や、座標補正(特に高さ方向の座標)を行う場合に光検知センサによる検知情報を用いるようにできる。
【発明の効果】
【0020】
本発明の入力装置によれば、従来に比べて操作性を向上させることができる。
【図面の簡単な説明】
【0021】
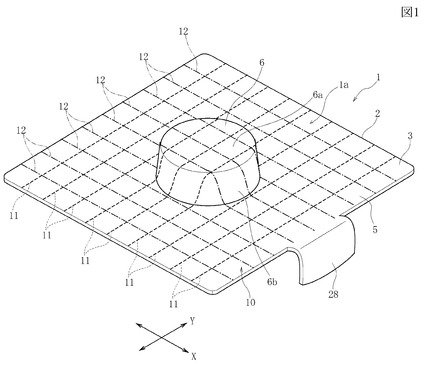
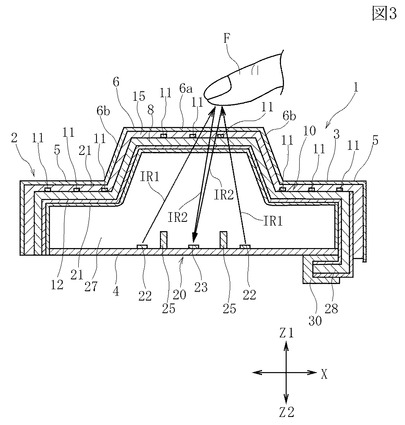
【図1】図1は、本実施形態の入力装置を構成するパネル部の斜視図である。
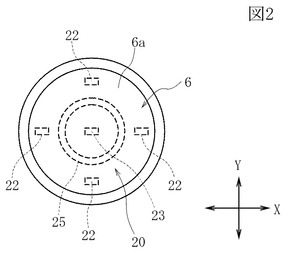
【図2】図2は、図1に示す操作表面の凸部及びその下方側に位置する光検知センサを透視して示した部分平面図である。
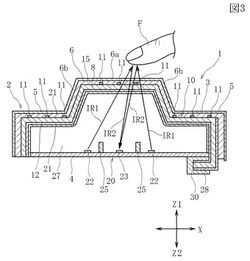
【図3】図3は、図1に示すパネル部を組み込んだ本実施形態における入力装置の縦断面図である。
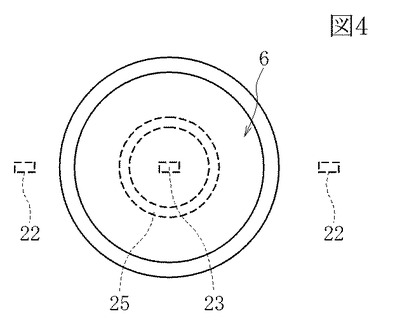
【図4】図4は、図2と異なった光検知センサの配置を説明するための部分平面図である。
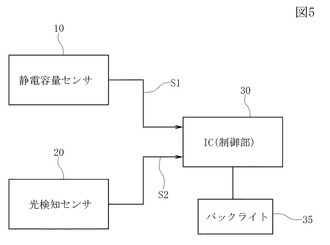
【図5】図5は、本実施形態における入力装置のブロック図である。
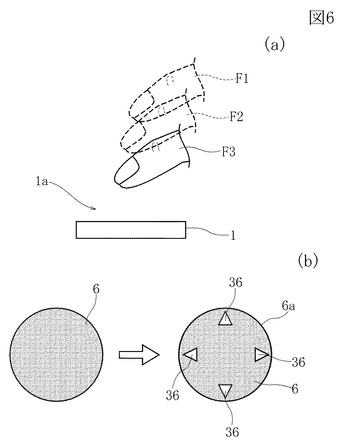
【図6】図6は、指(操作体)が入力装置に近づいたときの動作検知を行い、その動作検知に基づいて操作表面に操作表示を照光させた状態を示す説明図であり、図6(a)は、入力装置及び指の側面図(模式図)、図6(b)は、無表示の操作表面に操作表示が照光した状態への切り替わりを説明するための平面図である。
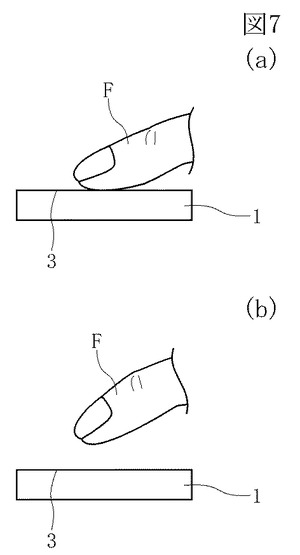
【図7】図7(a)は、指(操作体)にて操作表面を操作している状態を示す側面図(模式図)であり、図7(b)は図7(a)の操作状態から不意に指が離れた状態を示す側面図(模式図)である。
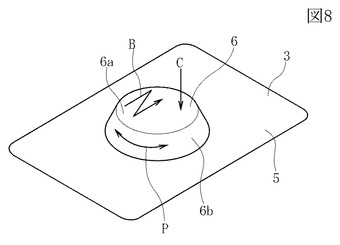
【図8】図8は、本実施形態における入力装置の操作の一例を示す模式図である。
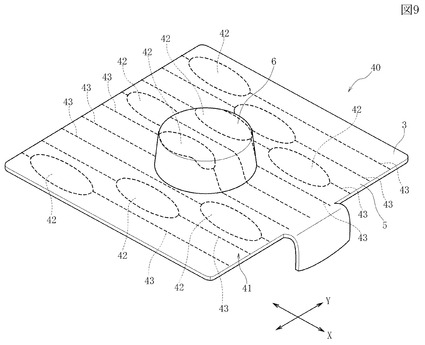
【図9】図9は、図1とは別の実施形態の入力装置を構成するパネル部の斜視図である。
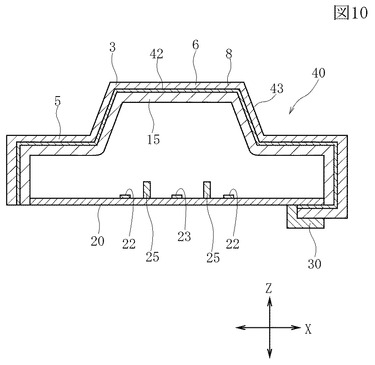
【図10】図10は、図9に示すパネル部を組み込んだ入力装置の縦断面図である。
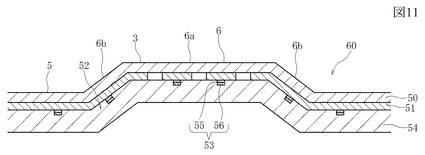
【図11】図11は、パネル部の一例を示す部分断面図である。
【図12】図12は、パネル部の一例を示す部分断面図である。
【図13】図13は、パネル部の一例を示す部分断面図である。
【図14】図14は、パネル部の一例を示す部分断面図である。
【図15】図15は、パネル部の一例を示す部分断面図である。
【発明を実施するための形態】
【0022】
図1は、本実施形態の入力装置を構成するパネル部の斜視図、図2は、図1に示す操作表面の凸部及びその下方側に位置する光検知センサを透視して示した部分平面図、図3は、図1に示すパネル部を組み込んだ本実施形態における入力装置の縦断面図である。
【0023】
図1,図3に示す入力装置1は、車載用として用いられ、例えば図1に示す入力装置1のパネル部2は、センターコンソールにて操作表面3が露出した状態で配置されている。したがって運転席や助手席から人が指(操作体)などにて操作表面3を操作することができる。例えば、本実施形態の入力装置1によりカーナビゲーション装置における表示画面内の各種操作を遠隔操作することができる。
【0024】
図1,図3に示すように入力装置1を構成するパネル部2は、操作表面3を備え、操作表面3は、平面部5と、平面部5と連続的に形成された凸部6とを有して構成される。平面部5と凸部6とは一体化されている。パネル部2は図3に示すようにほぼ一定厚で立体フォーミングされており、凸部6の裏面側には凸空間が広がっている。
【0025】
ここで本実施形態では、操作表面3と操作領域1aとが存在する。操作表面3は指F等の操作体による接触、あるいは近接操作、又は、前記接触及び前記近接操作を行うことが可能な表面を指す。よって下記、明細書内で「操作表面3上」という表現をする場合、操作表面3への接触のみならず表面への近接状態も含まれる。一方、操作領域1aには、操作表面3から上方に離れた中空検知(前記近接操作よりも更に上方に離れた位置での検知)が可能な領域を含む。したがって操作領域1aには、操作表面3と、操作表面3から上方に離れた空間領域も含まれる。
【0026】
なお図1では、操作表面3が平面部5と凸部6とで構成されるが、例えば平面部5と凹部とで構成されてもよいし、あるいは、平面部5と凸部6及び凹部とで構成されてもよい。このとき、平面部5と凹部、平面部5と凸部とは連続低に形成されている。また、平面部が凸部、凹部ほどではない程度の曲率を有していてもよい。
【0027】
図3に示すように、パネル部2は透光性シート8を備える。透光性シート8は、例えばポリカーボネート(PC)やポリエチレンテレフタレート(PET)シートで形成される。なお本実施形態において「透光性」とは、少なくとも光検知センサ20から発せられる光を透過することである。後述するように光検知センサ20から発せられる光が赤外線であれば赤外線を透過することが必要である。それ以外に可視光線も透過する構成とすることで、操作表面3に色々な表示を行うことができるが(後記)、光検知センサ20から発せられる光以外も透過可能な材質とするか否かは使用形態等による。
【0028】
図1,図3に示すように、透光性シート8の表面(上面)及び裏面(下面)の両面に静電容量センサ10を構成する第1電極11と第2電極12とが交差するように形成されている。ここで、透光性シート8の表面(上面)とは図3に示すZ1側の面を指し、透光性シート8の裏面(下面)とはZ2側の面を指す。図1に示すように複数本の第1電極11はY方向に延出し、各第1電極11がX方向に間隔を空けて配置されている。一方、複数本の第2電極12はX方向に延出し、各第2電極12がY方向に間隔を空けて配置されている。
【0029】
また図1,図3の構成以外にも、操作表面に対する操作を検出することができればよく、例えば操作表面が所定の厚さを有しており、このような操作表面にインモールド形成等の手法を用いて静電容量センサを埋設してもよい。
【0030】
図1,図3に示すように、透光性シート8は、立体的に成形されており、透光性シート8の表面側の平坦部から凸部への起伏に沿って各第1電極11が形成されており、透光性シート8の裏面側の平坦部から凸部への起伏に沿って各第2電極12が形成されている。このように透光性シート8の起伏に沿って各電極11、12を形成することで、操作表面3の平面部5のみならず凸部6の上面6aや側面6bを操作したときでも操作位置を適切に検知することが可能である。
【0031】
図3に示すように、透光性シート8の表面側に透光性樹脂層15が前記透光性シート8に重ねて成形されている。透光性樹脂層15は例えばインサート成形(射出成形)により形成できる。このように透光性樹脂層15を透光性シート8に重ねて成形することで、パネル部2の強度を保つことができ、また第1電極11を保護でき、第1電極11間の間隔を埋めて操作表面3の平坦性(ここでいう平坦性とは平坦部5や凸部6の上面6aにおける各面の平坦性を指す)を向上させることができる。また透光性シート8と透光性樹脂層15とを重ねて成形することで、後述する光検知センサ20による発光・受光を適切に行うことができる。
【0032】
また図3に示すように、透光性樹脂層15の表面や第2電極12の露出面にUV又は自己治癒塗装等による被膜21が形成されていることが好適である。
【0033】
図3に示すように、パネル部2の下方(Z2)には基板4が配置されており、基板4上に光検知センサ20が設けられている。光検知センサ20は、発光素子22と受光素子23とを有して構成される。発光素子22は例えば赤外線発光ダイオードであり、受光素子23は、赤外線フォトダイオードである。図2及び図3に示すように、受光素子23は、パネル部2の凸部6の略中央下に一つ配置されており、発光素子22は、受光素子23からX方向の両側及びY方向の両側に夫々、配置されている。図2に示す実施形態の発光素子22は、平面視にて凸部6の枠内に配置されるが、図4に示すように、凸部6の外側、すなわち操作表面3を構成する平面部5下に配置されてもよい。また図2に示すように4つの発光素子22を配置してもよいし、図4に示すように、発光素子22の数を2つとしてもよい。本実施形態では発光素子22及び受光素子23の数を限定するものでないが、少なくとも発光素子22を複数個配置することで、指(操作体)Fの操作表面3上での操作位置(平面座標)を検知することが可能である。特に図2に示すように、発光素子22をX方向及びY方向に夫々、複数個配置することで、指FのX座標及びY座標を光検知センサ20で知ることが可能である。また図2における光検知センサ20の配置は、凸部6の上面6aを指(操作体)Fで操作する際の位置検知に適したものである。平面部5上での指Fの操作位置の検知を光検知センサ20でも適切に行う場合には、図4のように、平面部5の下方位置にも発光素子22を配置することが好ましいが、発光素子22の配置は、操作表面3の形態や、使用用途、光検知センサ20による検知が最も必要とされる領域等によってその都度、設計変更することができる。
【0034】
図2,図3,図4に示すように、発光素子22と受光素子23との間には、遮蔽板25が配置されている。遮蔽板25を配置することで、光検知センサ20による検知精度を向上させることができる。
【0035】
なお本実施形態では、透光性シート8、透光性樹脂層15及び被膜21には、赤外線を透過可能な材質が選択される。
【0036】
図1に示すパネル部2の接続部28は、図3に示すように、基板4の裏面側でIC(制御部)30と電気的に接続された状態にされている。接続部28には各第1電極11及び各第2電極12からの配線が引き延ばされ、IC30と接続する端子部を構成している。なお図1では接続部28を一つとしたが、第1電極11用、及び第2電極12用に夫々、接続部を分けて形成してもよい。
【0037】
図5に示すように、IC(制御部)30には静電容量センサ10及び光検知センサ20が夫々接続されている。静電容量センサ10では、指(操作体)Fが操作表面3上を操作したとき静電容量変化に基づいて指Fの操作位置を検知でき、その検知信号S1が、IC30に送られる。
【0038】
一方、光検知センサ20では、図3に示すように、指(操作体)Fが操作表面3上、あるいは操作表面3から離れた上方に位置すると、発光素子22から発光した赤外線IR1がパネル部2と基板4間の空間27内を伝播するとともに、透光性シート8、透光性樹脂層15及び被膜21を透過して指Fで反射し、その反射光IR2を受光素子23で受光することで、指Fを検知することができ、その検知信号S2がIC30に送られる。
【0039】
静電容量センサ10からの検知信号S1は指Fが操作表面3上にあるとき、あるいは、指Fが操作表面3から若干、離れた操作領域1a内でも得ることが出来る。しかしながら図6(a)のように、指F1が、入力装置1(図6(a)では入力装置を簡略化して示している)からかなり離れた操作領域1aにあると静電容量センサ10では指F1の存在を検知することが困難となり、また指F1が図6(a)に示すF1→F2→F3の順に入力装置1に近づいていることも静電容量センサ10では検知できない。
【0040】
一方、本実施形態における光検知センサ20では、指F1が操作表面3aから静電容量センサ10では検知が困難なほど上方に離れた状態にあっても発光素子22からの赤外線を反射でき、その反射光が受光素子23に受光できる位置に指Fがあれば(すなわち本実施形態でいう操作領域1a内に指Fがあれば)、指F1の存在を検知することができ、また指FがF1→F2→F3の順に入力装置1に近づいたことを光検知センサ20の検知信号S2により知ることが可能である。したがって例えば図6(b)の左図にあるように、指Fが入力装置1の操作表面3の凸部6の上方にない場合には無表示であるが、図6(a)に示すように指Fが操作領域1a内にあり、F1→F2→F3のように入力装置1に近づいたこと、あるいは、指FがF3の位置にまで入力装置1に近づいたことを光検知センサ20により検知したときは、IC(制御部)30にて指Fがその後、操作表面3上にて操作を開始すると動作検知(予測)して、まだ指Fが操作表面3に達していない中空の段階で、例えば図5に示すバックライト35を点灯させて図6(b)の右図に示すように、凸部6の上面6aに所定の操作表示36を照光させることができる。なお図6(b)にでは、例えば、後述する加飾印刷層(赤外線は透過するが可視光は遮断される印刷層)がパネル部内に形成され、バックライト35を点灯させたときに前記加飾印刷層のない操作表示36の部分だけに光が透過するようにしておくことで、操作表示36を適切に照光させることができる。あるいは、液晶ディスプレイなどを配置して操作表面3に表示される画像が切り換えられるようにすることも可能である。
【0041】
また本実施形態では図7(a)に示すように、入力装置1(図7では入力装置を簡略化して示している)の操作表面3上にて指Fを操作させているとき、静電容量センサ10からの検知信号S1により指Fの操作位置を知ることができる。
【0042】
例えば操作表面3の凸部6の上面6aや側面6bに対して図8の矢印B〜Dに示すような操作を行うことができ、その際の指Fの操作位置を静電容量センサ10により知ることができる。なお図8では図示していないが、凸部6の周囲に広がる平坦部5の下方側にも静電容量センサ10が配置されているから(図1参照)、平坦部5における指Fの操作位置も静電容量センサ10からの検知信号S1により求めることが出来る。
【0043】
本実施形態では、図7(a)の操作状態から図7(b)ように、指Fが入力装置1の操作表面3から離れ、その離れた距離が静電容量センサ10では検知不能なほど大きくなると、静電容量センサ10から検知信号S1がIC30に送信されなくなるが、指Fが光検知センサ20では検知可能な操作領域1a内にあれば、前記光検知センサ20により指Fの検知情報を得ることが出来る。このように操作表面3への操作に対する検知限界距離は、光検知センサ20のほうが、静電容量センサ10に比べて長い。ここで光検知センサ20からは少なくとも、指Fと操作表面3間の距離を知ることができ、すなわち指Fの高さ方向(Z)の位置を知ることが可能である。
【0044】
したがってIC30では、光検知センサ20からの検知信号S2に基づいて、指Fがまだ動作範囲内にあると判断し、静電容量センサ10から検知信号S1が送信されない状態でも、それまでの入力やカーナビゲーション装置の画面に表示されているモードを終了させずに維持するよう簡単に制御することが出来る。
【0045】
例えば走行中に図8等の操作を行っているとき、振動により、指Fが操作表面3から図7(b)のように不意に離れてしまうことがあるが、操作者としてはまだ操作途中との意識であるため指Fが光検知センサ20により検知できるとともに、指Fが所定距離内にあると判断されれば、それまでの操作を継続させることで良好な操作性を得ることが可能になる。
【0046】
また、上記したように光検知センサ20からの検知信号S2により、指Fの操作表面3からの距離を知ることができる。一方、静電容量センサ10からの検知信号S1では、指Fの操作表面3からの距離を知ることができないか、あるいは正確な距離を得ることが出来ない。よって静電容量センサ10からの検知信号S1に光検知センサ20からの検知信号S2を補完することで、指Fの操作座標位置(X,Y,Z)を補正でき、指Fの位置検知を高精度なものに出来る。
【0047】
また図2に示したように、複数の発光素子22を用い、各発光素子22から順番に赤外線を発光し、夫々の反射光を受光素子23で受光したときの各IR強度に基づいて指Fの操作表面3内での操作位置(X,Y)を知ることができる。IC30では、静電容量センサ10及び光検知センサ20の双方から検知信号S1,S2を受けたとき、例えば、静電容量センサ10からの検知信号S1に基づいて指Fの操作位置(X,Y)を決定する。ただしかかる場合も、光検知センサ20の検知信号S2を補完的に用い、指Fの高さ方向(Z)の座標を得ることができる。また、例えば手袋をして操作した場合など、静電容量センサ10では指Fの操作位置を検知できない場合、光検知センサ20の検知信号S2に基づいて、指Fの操作位置(X,Y)を決定することが可能である。静電容量センサ10のみが組み込まれた従来構造では、一旦、手袋を外す必要があったが、本実施形態では、手袋をしたままでも光検知センサ20による指Fの操作位置を検知でき、したがって操作性の向上を図ることができる。
【0048】
図9は、図1とは別の実施形態の入力装置を構成するパネル部の斜視図、図10は、図9に示すパネル部を組み込んだ入力装置の縦断面図である。
なお図9,図10において図1,図3と同じ部分については同じ符号を付した。
【0049】
図9,図10に示す入力装置40では、透光性シート8の裏面(下面)側にのみ静電容量センサ41を構成する複数の電極42が形成されている。図9に示すように、例えば電極42は略楕円形状で各電極42のX方向の両側に細い配線部43が引き延ばされている。Y方向にて隣り合う配線部43に接続された各電極42はY方向にて向き合わないようにX方向にずれて配置されている。
【0050】
図10に示すように、透光性シート8の裏面側に透光性樹脂層15が重ねて成形されている。図10では塗装による被膜21を操作表面3に設けていないが設けることも可能である。また図10に示すように光検知センサ20の構成は図1と同様である。
【0051】
図9,図10に示す静電容量センサ41の構成であっても、指Fに近い電極42との間で静電容量結合が生じ、静電容量変化に基づいて、検知信号S1を得ることが出来る。
静電容量センサの構成は図1,図10以外のものであってもよい。
【0052】
また、全ての実施形態に共通して、静電容量センサ又は光検知センサを用いて操作を検知する際、操作者の指及び手腕に関しても検知を行うことで、操作が運転席側又は助手席側のいずれから行われているかを認識することも可能である。特に光検知センサは静電容量センサよりも検知限界距離が長いことから好適である。運転席側又は助手席側のいずれからの操作に応じて、車載機器の操作項目が異なる場合に、操作者が意図することなく判断が行われることから、操作性の向上を図ることができる。
【0053】
図11から図15は、夫々、パネル部の部分断面図を示す一例である。なお図11〜図15において同じ符号の層は同じ部分を示している。
【0054】
図11では、ポリカーボネート(PC)やポリエチレンテレフタレート(PET)シートによる透光性シート50の裏面(下面)に加飾印刷層51が形成され、さらに静電容量センサ52を構成する電極53が形成されている。また、透光性シート50の一方の面に加飾印刷層51を形成し他方の面に電極53を形成することもできる。
【0055】
さらに図11では、透光性シート50の裏面側に透光性樹脂層54が重ねて成形されている。
【0056】
図11では図9と同様に、透光性シート50の片面のみに静電容量センサ52を構成する電極53が形成される構成に適している。
【0057】
パネル部の製造方法について説明する。まず透光性シート50に加飾印刷層(シンボル印刷層)51をスクリーン印刷やデジタル印刷等により形成する。続いて、透光性シート50に前記電極53を構成する導電印刷層55をスクリーン印刷する。なお導電印刷層55にはポリピロール(PPY)等を用いるとよい。続いて、立体フォーミング(真空圧空成形)を行い、操作表面3に平坦部5と凸部6を形成する。さらに導電印刷層55に重ねてメッキ層56を電解メッキあるいは無電解メッキにより形成する。メッキ層56の電気抵抗率は導電印刷層55よりも低い。これにより、導電印刷層55とメッキ層56との積層構造からなる電極53の低抵抗化を図ることができる。
【0058】
なお上記のように電極(導電印刷層55)を印刷形成したことで、適切に立体フォーミングすることが可能であり、図11に示すように、立体形状に沿って電極を引き回すことができる。したがって操作表面3の平坦部5のみならず凸部6の上面6aや側面6bを操作したときでも、その操作位置を静電容量センサにより適切に検知することが可能である。なお図12以降では電極が一層構造で図示されているが図11と同様に2層構造とすることが好適である。
【0059】
上記により形成されたパネル部60の外形をプレスによりトリミングし、さらに、透光性樹脂層54をインサート成形する。最後に、UV又は自己治癒塗装等による被膜(図11には図示しない)を形成する。被膜の形成は必要に応じて行われる。
【0060】
ここで、透光性シート50、透光性樹脂層54、加飾印刷層51は、いずれも赤外線を透過する材質である。赤外線は光検知センサ20による発光・受光で使用されるものであり、赤外線以外の波長の光を光検知センサ20で使用する場合は、その光の波長を透過する材質で透光性シート50、透光性樹脂層54、加飾印刷層51を形成することが必要である。一方、可視光線は、加飾印刷層51では透過しないが、透光性シート50及び透光性樹脂層54では透過する。例えば図6(b)で説明したように、バックライトが点灯していない状態では図6(b)の右側の無表示状態であるが、バックライトが点灯すると、光が透光性シート50及び透光性樹脂層54を透過する。加飾印刷層51がある部分では光が透過せず、加飾印刷層51と同層であって、操作表示36に模られた光透過部から透過されて、操作表面から見ると操作表示36の部分だけを照光させることができる。
加飾印刷層51の平面形状を変えることで、操作表面3での表示を変更できる。
【0061】
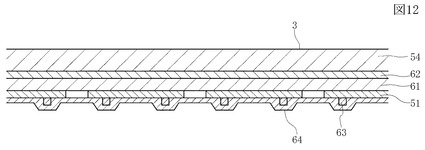
図12では、透光性シート61の両面に静電容量センサを構成する電極62,63を形成している。図12では、透光性シート61の裏面側に形成した電極63の露出面を保護すべく塗装による被膜64を形成している。製造方法については上記した図11に準拠する。
【0062】
また図12では、操作表面3全体を平面で形成している。すなわち立体フォーミングを行っていない。このように操作表面3全体が平面であってもよい。図13、図14についても同様である。
【0063】
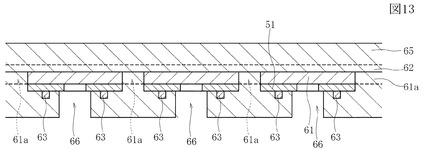
図13では、透光性シート61に部分的に貫通孔61aを形成した後に、金型を用いて透光性樹脂層65を成形する際に、金型のキャビティ側に樹脂を充填後、貫通孔61aを介して金型のコア側に樹脂を流し込むことで図13に示すように透光性シート61の表裏面に透光性樹脂層65を成形できる。符号66は、押切り部である。なおパネル部全体の製造方法については上記した図11に準拠する。
【0064】
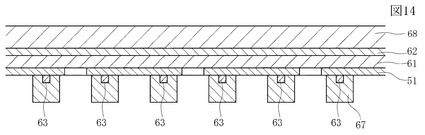
あるいは図14に示すように、透光性樹脂層67,68を二色成形することも出来る。なおパネル部全体の製造方法については上記した図11に準拠する。
【0065】
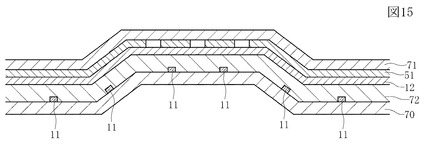
図15では、第1の透光性シート70に例えば、X方向に間隔を空けて配置された第1電極11(図1参照)を形成し、第2の透光性シート71に例えば、加飾印刷層51及びY方向に間隔を空けて配置された第2電極12(図1参照)を形成し、第1の透光性シート70側の第1電極11と第2の透光性シート71側の第2電極12とを対向させた状態で、第1の透光性シート70と第2の透光性シート71との間に透光性樹脂層72を成形している。なおパネル部全体の製造方法については上記した図11に準拠する。
【0066】
上記では、本実施形態の入力装置を車載用として説明したが、車載用に限定されるものでない。ただし車載用の入力装置に特に適している。
【符号の説明】
【0067】
F、F1、F2、F3 指
S1、S2 検知信号
1 入力装置
2、60 パネル部
3 操作表面
4 基板
5 平面部
6 凸部
8、50,61、70、71 透光性シート
10、41、52 静電容量センサ
11、12、42、53,62、63 電極
15、54、65 透光性樹脂層
20 光検知センサ
21、64 被膜
22 発光素子
23 受光素子
30 IC
36 操作表示
51 加飾印刷層
55 導電印刷層
56 メッキ層
【技術分野】
【0001】
本発明は、静電容量センサを有して操作領域での操作位置を検知可能とした入力装置に関する。
【背景技術】
【0002】
特許文献1には車載用入力装置に関する発明が開示されている。車載用入力装置には、操作面の裏面側に静電容量センサが配置され、操作面を指で操作したときに指の位置を静電容量変化に基づいて検知することが可能になる。
【0003】
しかしながら、例えば、走行中に入力装置への操作を行ったとき、操作中に車体が揺れるなどして不意に指が操作面から離れると、静電容量センサが操作面から離れた指を検知できない問題があった。このように静電容量センサにて指が検知されなくなったとき、例えば途中までの入力状態がリセットされたり、入力が終了したと判断されたりしてしまうと、操作者としては、まだ操作途中との意識であるため、操作性に不満を覚える。従来では、操作を終了したから指が操作面上から無くなったのか、あるいは操作を終了していないが不意に指が操作面から離れただけなのか判別できず、すなわち操作面から指が離れたときの動作予測ができなかった。
【0004】
また例えば手袋をした状態では、静電容量センサにて操作位置を検知できず、操作のために一旦、手袋を取る必要があるなど、操作者が操作性に煩わしさを感じることがあった。
【0005】
特許文献2には、操作面を立体的に形成した入力装置が開示されているが、特許文献2の構造においても上記と同様の問題が生じる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−311306号公報
【特許文献2】特開2010−182201号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は上記従来の課題を解決するためのものであり、特に、従来に比べて操作性を向上させた入力装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明における入力装置は、
操作体により操作される操作領域と、前記操作領域から下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサと、
前記操作領域から下方側に配置された発光素子と受光素子とを有して構成され、前記発光素子から前記操作領域に向けて発せられた光に基づく反射光を前記受光素子で受光することにより、前記操作体の検知情報を取得することができる光検知センサと、を有することを特徴とするものである。
【0009】
本発明では、静電容量センサのみならず、光検知センサも用いることで、静電容量センサのみでは成し得ない検知情報を取得できる。そして本発明では、光検知センサの検知情報(操作体の操作位置の検知)を、静電容量センサの検知情報とともに用いたり、静電容量センサから検知情報が得られないような場合には、前記静電容量センサの検知情報に代えて用いることができ、これにより良好な操作性を得ることができ、また操作体の位置検知を高精度なものに出来る。例えば不意に操作体が操作領域から離れて静電容量センサでは操作体を検知できない状況でも、光検知センサにより検知することが可能である。よって操作体の検知範囲を、従来の静電容量センサのみを用いた構成に比べて広げることができ、良好な操作性を得ることができる。例えば上記のように不意に操作体が操作領域から離れてしまっても、光検知センサによる検知情報に基づいて、まだ操作中だとして操作中のモードを終了しないよう簡単に制御できる。また静電容量センサの検知情報に対して例えば光検知センサの検知情報を補完することで、操作体の高さ座標(Z検知)を補正でき、操作体の位置検知を高精度なものに出来る。
【0010】
本発明では、前記操作領域は接触、あるいは、近接操作、又は、前記接触及び近接操作を行う操作表面を有し、少なくとも前記発光素子は複数個、配置されており、前記光検知センサでは、前記操作体の前記操作表面から上方での操作位置が検知可能とされていることが好ましい。このように光検知センサでは操作体の操作表面から上方での操作位置の検知が可能であるため、例えば、静電容量センサによる操作体の検知が不能となる場合でも、光検知センサによる検知情報を用いることで、操作体の位置検知を適切に行うことが出来る。例えば手袋をしている場合、静電容量センサのみが組み込まれた従来構成では、一旦、手袋を外すことが必要であったが、本発明では、手袋をしたままでも光検知センサによる操作体の操作位置を検知でき、操作性の向上を図ることができる。
【0011】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な透光性シートと、前記透光性シートの片面あるいは両面に設けられた前記静電容量センサを構成する電極とを有し、表面が前記操作表面とされたパネル部を備え、前記パネル部の下方側に、基板上に配置された前記光検知センサが設けられていることが好ましい。これにより透光性シートを介して光検知センサでの発光・受光を適切に行うことができ、静電容量センサと光検知センサの双方を適切に配置できる。
【0012】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な透光性樹脂層が前記透光性シートに重ねて成形されていることが好ましい。
【0013】
また本発明では、前記発光素子からの光及び前記反射光を透過可能な加飾印刷層が前記透光性シートに重ねて形成されていることが好ましい。加飾印刷層を設けることで、操作表面に色々な表示を照光させることができる。
【0014】
また本発明では、前記静電容量センサを構成する電極は、前記透光性シートに印刷形成されたものであることが好ましい。これにより、平面状態の透光性シートに前記電極を印刷した状態から適切に立体フォーミングすることができる。
【0015】
また本発明では、前記電極は、導電印刷層と、前記導電印刷層よりも低抵抗のメッキ層との積層構造で形成されることが好ましい。これにより電極抵抗の低減を図ることができる。
【0016】
また本発明では、前記操作表面は、平面部と、前記平面部と連続的に形成された凸部、あるいは前記平面部と連続的に形成された凹部、又は前記凸部及び前記凹部と、を有し、前記静電容量センサは、前記操作表面の下方側にて、前記平面部から前記凸部、あるいは前記凹部、又は前記凸部及び前記凹部の起伏に沿って形成されている構成にできる。これにより操作体により平面部を操作したときのみならず凸部あるいは凹部を操作体により操作したときの操作位置を適切に検知することができる。
【0017】
また本発明では、前記操作表面への操作に対する検知限界距離は、前記光検知センサのほうが、前記静電容量センサに比べて長いことが好ましい。これにより、前記静電容量センサの前記検知限界距離を越えた位置に前記操作体があるときの前記操作体の動作検知を、前記光検知センサの検知情報に基づいて行うことができる。
【0018】
また本発明では、前記光検知センサからの検知情報により、前記操作表面に所定の情報を表示することが好ましい。例えば、前記操作表面から離れた位置にある前記操作体が前記操作表面に所定距離近づいたことを前記光検知センサにより検知した際、前記操作表面に所定の情報を表示することができる。操作体をまだ操作表面に触れていない段階で情報を表示させることができ、また操作体が操作表面から離れても情報表示を継続させることができ、操作性を向上させることができる。
【0019】
また本発明では、前記光検知センサの前記操作体に対する検知情報を、前記静電容量センサによる前記操作体の位置検知の際に補完的に用いることができる。静電容量センサからの検知情報をメインで使用するが、静電容量センサからの検知情報が得られない場合や、座標補正(特に高さ方向の座標)を行う場合に光検知センサによる検知情報を用いるようにできる。
【発明の効果】
【0020】
本発明の入力装置によれば、従来に比べて操作性を向上させることができる。
【図面の簡単な説明】
【0021】
【図1】図1は、本実施形態の入力装置を構成するパネル部の斜視図である。
【図2】図2は、図1に示す操作表面の凸部及びその下方側に位置する光検知センサを透視して示した部分平面図である。
【図3】図3は、図1に示すパネル部を組み込んだ本実施形態における入力装置の縦断面図である。
【図4】図4は、図2と異なった光検知センサの配置を説明するための部分平面図である。
【図5】図5は、本実施形態における入力装置のブロック図である。
【図6】図6は、指(操作体)が入力装置に近づいたときの動作検知を行い、その動作検知に基づいて操作表面に操作表示を照光させた状態を示す説明図であり、図6(a)は、入力装置及び指の側面図(模式図)、図6(b)は、無表示の操作表面に操作表示が照光した状態への切り替わりを説明するための平面図である。
【図7】図7(a)は、指(操作体)にて操作表面を操作している状態を示す側面図(模式図)であり、図7(b)は図7(a)の操作状態から不意に指が離れた状態を示す側面図(模式図)である。
【図8】図8は、本実施形態における入力装置の操作の一例を示す模式図である。
【図9】図9は、図1とは別の実施形態の入力装置を構成するパネル部の斜視図である。
【図10】図10は、図9に示すパネル部を組み込んだ入力装置の縦断面図である。
【図11】図11は、パネル部の一例を示す部分断面図である。
【図12】図12は、パネル部の一例を示す部分断面図である。
【図13】図13は、パネル部の一例を示す部分断面図である。
【図14】図14は、パネル部の一例を示す部分断面図である。
【図15】図15は、パネル部の一例を示す部分断面図である。
【発明を実施するための形態】
【0022】
図1は、本実施形態の入力装置を構成するパネル部の斜視図、図2は、図1に示す操作表面の凸部及びその下方側に位置する光検知センサを透視して示した部分平面図、図3は、図1に示すパネル部を組み込んだ本実施形態における入力装置の縦断面図である。
【0023】
図1,図3に示す入力装置1は、車載用として用いられ、例えば図1に示す入力装置1のパネル部2は、センターコンソールにて操作表面3が露出した状態で配置されている。したがって運転席や助手席から人が指(操作体)などにて操作表面3を操作することができる。例えば、本実施形態の入力装置1によりカーナビゲーション装置における表示画面内の各種操作を遠隔操作することができる。
【0024】
図1,図3に示すように入力装置1を構成するパネル部2は、操作表面3を備え、操作表面3は、平面部5と、平面部5と連続的に形成された凸部6とを有して構成される。平面部5と凸部6とは一体化されている。パネル部2は図3に示すようにほぼ一定厚で立体フォーミングされており、凸部6の裏面側には凸空間が広がっている。
【0025】
ここで本実施形態では、操作表面3と操作領域1aとが存在する。操作表面3は指F等の操作体による接触、あるいは近接操作、又は、前記接触及び前記近接操作を行うことが可能な表面を指す。よって下記、明細書内で「操作表面3上」という表現をする場合、操作表面3への接触のみならず表面への近接状態も含まれる。一方、操作領域1aには、操作表面3から上方に離れた中空検知(前記近接操作よりも更に上方に離れた位置での検知)が可能な領域を含む。したがって操作領域1aには、操作表面3と、操作表面3から上方に離れた空間領域も含まれる。
【0026】
なお図1では、操作表面3が平面部5と凸部6とで構成されるが、例えば平面部5と凹部とで構成されてもよいし、あるいは、平面部5と凸部6及び凹部とで構成されてもよい。このとき、平面部5と凹部、平面部5と凸部とは連続低に形成されている。また、平面部が凸部、凹部ほどではない程度の曲率を有していてもよい。
【0027】
図3に示すように、パネル部2は透光性シート8を備える。透光性シート8は、例えばポリカーボネート(PC)やポリエチレンテレフタレート(PET)シートで形成される。なお本実施形態において「透光性」とは、少なくとも光検知センサ20から発せられる光を透過することである。後述するように光検知センサ20から発せられる光が赤外線であれば赤外線を透過することが必要である。それ以外に可視光線も透過する構成とすることで、操作表面3に色々な表示を行うことができるが(後記)、光検知センサ20から発せられる光以外も透過可能な材質とするか否かは使用形態等による。
【0028】
図1,図3に示すように、透光性シート8の表面(上面)及び裏面(下面)の両面に静電容量センサ10を構成する第1電極11と第2電極12とが交差するように形成されている。ここで、透光性シート8の表面(上面)とは図3に示すZ1側の面を指し、透光性シート8の裏面(下面)とはZ2側の面を指す。図1に示すように複数本の第1電極11はY方向に延出し、各第1電極11がX方向に間隔を空けて配置されている。一方、複数本の第2電極12はX方向に延出し、各第2電極12がY方向に間隔を空けて配置されている。
【0029】
また図1,図3の構成以外にも、操作表面に対する操作を検出することができればよく、例えば操作表面が所定の厚さを有しており、このような操作表面にインモールド形成等の手法を用いて静電容量センサを埋設してもよい。
【0030】
図1,図3に示すように、透光性シート8は、立体的に成形されており、透光性シート8の表面側の平坦部から凸部への起伏に沿って各第1電極11が形成されており、透光性シート8の裏面側の平坦部から凸部への起伏に沿って各第2電極12が形成されている。このように透光性シート8の起伏に沿って各電極11、12を形成することで、操作表面3の平面部5のみならず凸部6の上面6aや側面6bを操作したときでも操作位置を適切に検知することが可能である。
【0031】
図3に示すように、透光性シート8の表面側に透光性樹脂層15が前記透光性シート8に重ねて成形されている。透光性樹脂層15は例えばインサート成形(射出成形)により形成できる。このように透光性樹脂層15を透光性シート8に重ねて成形することで、パネル部2の強度を保つことができ、また第1電極11を保護でき、第1電極11間の間隔を埋めて操作表面3の平坦性(ここでいう平坦性とは平坦部5や凸部6の上面6aにおける各面の平坦性を指す)を向上させることができる。また透光性シート8と透光性樹脂層15とを重ねて成形することで、後述する光検知センサ20による発光・受光を適切に行うことができる。
【0032】
また図3に示すように、透光性樹脂層15の表面や第2電極12の露出面にUV又は自己治癒塗装等による被膜21が形成されていることが好適である。
【0033】
図3に示すように、パネル部2の下方(Z2)には基板4が配置されており、基板4上に光検知センサ20が設けられている。光検知センサ20は、発光素子22と受光素子23とを有して構成される。発光素子22は例えば赤外線発光ダイオードであり、受光素子23は、赤外線フォトダイオードである。図2及び図3に示すように、受光素子23は、パネル部2の凸部6の略中央下に一つ配置されており、発光素子22は、受光素子23からX方向の両側及びY方向の両側に夫々、配置されている。図2に示す実施形態の発光素子22は、平面視にて凸部6の枠内に配置されるが、図4に示すように、凸部6の外側、すなわち操作表面3を構成する平面部5下に配置されてもよい。また図2に示すように4つの発光素子22を配置してもよいし、図4に示すように、発光素子22の数を2つとしてもよい。本実施形態では発光素子22及び受光素子23の数を限定するものでないが、少なくとも発光素子22を複数個配置することで、指(操作体)Fの操作表面3上での操作位置(平面座標)を検知することが可能である。特に図2に示すように、発光素子22をX方向及びY方向に夫々、複数個配置することで、指FのX座標及びY座標を光検知センサ20で知ることが可能である。また図2における光検知センサ20の配置は、凸部6の上面6aを指(操作体)Fで操作する際の位置検知に適したものである。平面部5上での指Fの操作位置の検知を光検知センサ20でも適切に行う場合には、図4のように、平面部5の下方位置にも発光素子22を配置することが好ましいが、発光素子22の配置は、操作表面3の形態や、使用用途、光検知センサ20による検知が最も必要とされる領域等によってその都度、設計変更することができる。
【0034】
図2,図3,図4に示すように、発光素子22と受光素子23との間には、遮蔽板25が配置されている。遮蔽板25を配置することで、光検知センサ20による検知精度を向上させることができる。
【0035】
なお本実施形態では、透光性シート8、透光性樹脂層15及び被膜21には、赤外線を透過可能な材質が選択される。
【0036】
図1に示すパネル部2の接続部28は、図3に示すように、基板4の裏面側でIC(制御部)30と電気的に接続された状態にされている。接続部28には各第1電極11及び各第2電極12からの配線が引き延ばされ、IC30と接続する端子部を構成している。なお図1では接続部28を一つとしたが、第1電極11用、及び第2電極12用に夫々、接続部を分けて形成してもよい。
【0037】
図5に示すように、IC(制御部)30には静電容量センサ10及び光検知センサ20が夫々接続されている。静電容量センサ10では、指(操作体)Fが操作表面3上を操作したとき静電容量変化に基づいて指Fの操作位置を検知でき、その検知信号S1が、IC30に送られる。
【0038】
一方、光検知センサ20では、図3に示すように、指(操作体)Fが操作表面3上、あるいは操作表面3から離れた上方に位置すると、発光素子22から発光した赤外線IR1がパネル部2と基板4間の空間27内を伝播するとともに、透光性シート8、透光性樹脂層15及び被膜21を透過して指Fで反射し、その反射光IR2を受光素子23で受光することで、指Fを検知することができ、その検知信号S2がIC30に送られる。
【0039】
静電容量センサ10からの検知信号S1は指Fが操作表面3上にあるとき、あるいは、指Fが操作表面3から若干、離れた操作領域1a内でも得ることが出来る。しかしながら図6(a)のように、指F1が、入力装置1(図6(a)では入力装置を簡略化して示している)からかなり離れた操作領域1aにあると静電容量センサ10では指F1の存在を検知することが困難となり、また指F1が図6(a)に示すF1→F2→F3の順に入力装置1に近づいていることも静電容量センサ10では検知できない。
【0040】
一方、本実施形態における光検知センサ20では、指F1が操作表面3aから静電容量センサ10では検知が困難なほど上方に離れた状態にあっても発光素子22からの赤外線を反射でき、その反射光が受光素子23に受光できる位置に指Fがあれば(すなわち本実施形態でいう操作領域1a内に指Fがあれば)、指F1の存在を検知することができ、また指FがF1→F2→F3の順に入力装置1に近づいたことを光検知センサ20の検知信号S2により知ることが可能である。したがって例えば図6(b)の左図にあるように、指Fが入力装置1の操作表面3の凸部6の上方にない場合には無表示であるが、図6(a)に示すように指Fが操作領域1a内にあり、F1→F2→F3のように入力装置1に近づいたこと、あるいは、指FがF3の位置にまで入力装置1に近づいたことを光検知センサ20により検知したときは、IC(制御部)30にて指Fがその後、操作表面3上にて操作を開始すると動作検知(予測)して、まだ指Fが操作表面3に達していない中空の段階で、例えば図5に示すバックライト35を点灯させて図6(b)の右図に示すように、凸部6の上面6aに所定の操作表示36を照光させることができる。なお図6(b)にでは、例えば、後述する加飾印刷層(赤外線は透過するが可視光は遮断される印刷層)がパネル部内に形成され、バックライト35を点灯させたときに前記加飾印刷層のない操作表示36の部分だけに光が透過するようにしておくことで、操作表示36を適切に照光させることができる。あるいは、液晶ディスプレイなどを配置して操作表面3に表示される画像が切り換えられるようにすることも可能である。
【0041】
また本実施形態では図7(a)に示すように、入力装置1(図7では入力装置を簡略化して示している)の操作表面3上にて指Fを操作させているとき、静電容量センサ10からの検知信号S1により指Fの操作位置を知ることができる。
【0042】
例えば操作表面3の凸部6の上面6aや側面6bに対して図8の矢印B〜Dに示すような操作を行うことができ、その際の指Fの操作位置を静電容量センサ10により知ることができる。なお図8では図示していないが、凸部6の周囲に広がる平坦部5の下方側にも静電容量センサ10が配置されているから(図1参照)、平坦部5における指Fの操作位置も静電容量センサ10からの検知信号S1により求めることが出来る。
【0043】
本実施形態では、図7(a)の操作状態から図7(b)ように、指Fが入力装置1の操作表面3から離れ、その離れた距離が静電容量センサ10では検知不能なほど大きくなると、静電容量センサ10から検知信号S1がIC30に送信されなくなるが、指Fが光検知センサ20では検知可能な操作領域1a内にあれば、前記光検知センサ20により指Fの検知情報を得ることが出来る。このように操作表面3への操作に対する検知限界距離は、光検知センサ20のほうが、静電容量センサ10に比べて長い。ここで光検知センサ20からは少なくとも、指Fと操作表面3間の距離を知ることができ、すなわち指Fの高さ方向(Z)の位置を知ることが可能である。
【0044】
したがってIC30では、光検知センサ20からの検知信号S2に基づいて、指Fがまだ動作範囲内にあると判断し、静電容量センサ10から検知信号S1が送信されない状態でも、それまでの入力やカーナビゲーション装置の画面に表示されているモードを終了させずに維持するよう簡単に制御することが出来る。
【0045】
例えば走行中に図8等の操作を行っているとき、振動により、指Fが操作表面3から図7(b)のように不意に離れてしまうことがあるが、操作者としてはまだ操作途中との意識であるため指Fが光検知センサ20により検知できるとともに、指Fが所定距離内にあると判断されれば、それまでの操作を継続させることで良好な操作性を得ることが可能になる。
【0046】
また、上記したように光検知センサ20からの検知信号S2により、指Fの操作表面3からの距離を知ることができる。一方、静電容量センサ10からの検知信号S1では、指Fの操作表面3からの距離を知ることができないか、あるいは正確な距離を得ることが出来ない。よって静電容量センサ10からの検知信号S1に光検知センサ20からの検知信号S2を補完することで、指Fの操作座標位置(X,Y,Z)を補正でき、指Fの位置検知を高精度なものに出来る。
【0047】
また図2に示したように、複数の発光素子22を用い、各発光素子22から順番に赤外線を発光し、夫々の反射光を受光素子23で受光したときの各IR強度に基づいて指Fの操作表面3内での操作位置(X,Y)を知ることができる。IC30では、静電容量センサ10及び光検知センサ20の双方から検知信号S1,S2を受けたとき、例えば、静電容量センサ10からの検知信号S1に基づいて指Fの操作位置(X,Y)を決定する。ただしかかる場合も、光検知センサ20の検知信号S2を補完的に用い、指Fの高さ方向(Z)の座標を得ることができる。また、例えば手袋をして操作した場合など、静電容量センサ10では指Fの操作位置を検知できない場合、光検知センサ20の検知信号S2に基づいて、指Fの操作位置(X,Y)を決定することが可能である。静電容量センサ10のみが組み込まれた従来構造では、一旦、手袋を外す必要があったが、本実施形態では、手袋をしたままでも光検知センサ20による指Fの操作位置を検知でき、したがって操作性の向上を図ることができる。
【0048】
図9は、図1とは別の実施形態の入力装置を構成するパネル部の斜視図、図10は、図9に示すパネル部を組み込んだ入力装置の縦断面図である。
なお図9,図10において図1,図3と同じ部分については同じ符号を付した。
【0049】
図9,図10に示す入力装置40では、透光性シート8の裏面(下面)側にのみ静電容量センサ41を構成する複数の電極42が形成されている。図9に示すように、例えば電極42は略楕円形状で各電極42のX方向の両側に細い配線部43が引き延ばされている。Y方向にて隣り合う配線部43に接続された各電極42はY方向にて向き合わないようにX方向にずれて配置されている。
【0050】
図10に示すように、透光性シート8の裏面側に透光性樹脂層15が重ねて成形されている。図10では塗装による被膜21を操作表面3に設けていないが設けることも可能である。また図10に示すように光検知センサ20の構成は図1と同様である。
【0051】
図9,図10に示す静電容量センサ41の構成であっても、指Fに近い電極42との間で静電容量結合が生じ、静電容量変化に基づいて、検知信号S1を得ることが出来る。
静電容量センサの構成は図1,図10以外のものであってもよい。
【0052】
また、全ての実施形態に共通して、静電容量センサ又は光検知センサを用いて操作を検知する際、操作者の指及び手腕に関しても検知を行うことで、操作が運転席側又は助手席側のいずれから行われているかを認識することも可能である。特に光検知センサは静電容量センサよりも検知限界距離が長いことから好適である。運転席側又は助手席側のいずれからの操作に応じて、車載機器の操作項目が異なる場合に、操作者が意図することなく判断が行われることから、操作性の向上を図ることができる。
【0053】
図11から図15は、夫々、パネル部の部分断面図を示す一例である。なお図11〜図15において同じ符号の層は同じ部分を示している。
【0054】
図11では、ポリカーボネート(PC)やポリエチレンテレフタレート(PET)シートによる透光性シート50の裏面(下面)に加飾印刷層51が形成され、さらに静電容量センサ52を構成する電極53が形成されている。また、透光性シート50の一方の面に加飾印刷層51を形成し他方の面に電極53を形成することもできる。
【0055】
さらに図11では、透光性シート50の裏面側に透光性樹脂層54が重ねて成形されている。
【0056】
図11では図9と同様に、透光性シート50の片面のみに静電容量センサ52を構成する電極53が形成される構成に適している。
【0057】
パネル部の製造方法について説明する。まず透光性シート50に加飾印刷層(シンボル印刷層)51をスクリーン印刷やデジタル印刷等により形成する。続いて、透光性シート50に前記電極53を構成する導電印刷層55をスクリーン印刷する。なお導電印刷層55にはポリピロール(PPY)等を用いるとよい。続いて、立体フォーミング(真空圧空成形)を行い、操作表面3に平坦部5と凸部6を形成する。さらに導電印刷層55に重ねてメッキ層56を電解メッキあるいは無電解メッキにより形成する。メッキ層56の電気抵抗率は導電印刷層55よりも低い。これにより、導電印刷層55とメッキ層56との積層構造からなる電極53の低抵抗化を図ることができる。
【0058】
なお上記のように電極(導電印刷層55)を印刷形成したことで、適切に立体フォーミングすることが可能であり、図11に示すように、立体形状に沿って電極を引き回すことができる。したがって操作表面3の平坦部5のみならず凸部6の上面6aや側面6bを操作したときでも、その操作位置を静電容量センサにより適切に検知することが可能である。なお図12以降では電極が一層構造で図示されているが図11と同様に2層構造とすることが好適である。
【0059】
上記により形成されたパネル部60の外形をプレスによりトリミングし、さらに、透光性樹脂層54をインサート成形する。最後に、UV又は自己治癒塗装等による被膜(図11には図示しない)を形成する。被膜の形成は必要に応じて行われる。
【0060】
ここで、透光性シート50、透光性樹脂層54、加飾印刷層51は、いずれも赤外線を透過する材質である。赤外線は光検知センサ20による発光・受光で使用されるものであり、赤外線以外の波長の光を光検知センサ20で使用する場合は、その光の波長を透過する材質で透光性シート50、透光性樹脂層54、加飾印刷層51を形成することが必要である。一方、可視光線は、加飾印刷層51では透過しないが、透光性シート50及び透光性樹脂層54では透過する。例えば図6(b)で説明したように、バックライトが点灯していない状態では図6(b)の右側の無表示状態であるが、バックライトが点灯すると、光が透光性シート50及び透光性樹脂層54を透過する。加飾印刷層51がある部分では光が透過せず、加飾印刷層51と同層であって、操作表示36に模られた光透過部から透過されて、操作表面から見ると操作表示36の部分だけを照光させることができる。
加飾印刷層51の平面形状を変えることで、操作表面3での表示を変更できる。
【0061】
図12では、透光性シート61の両面に静電容量センサを構成する電極62,63を形成している。図12では、透光性シート61の裏面側に形成した電極63の露出面を保護すべく塗装による被膜64を形成している。製造方法については上記した図11に準拠する。
【0062】
また図12では、操作表面3全体を平面で形成している。すなわち立体フォーミングを行っていない。このように操作表面3全体が平面であってもよい。図13、図14についても同様である。
【0063】
図13では、透光性シート61に部分的に貫通孔61aを形成した後に、金型を用いて透光性樹脂層65を成形する際に、金型のキャビティ側に樹脂を充填後、貫通孔61aを介して金型のコア側に樹脂を流し込むことで図13に示すように透光性シート61の表裏面に透光性樹脂層65を成形できる。符号66は、押切り部である。なおパネル部全体の製造方法については上記した図11に準拠する。
【0064】
あるいは図14に示すように、透光性樹脂層67,68を二色成形することも出来る。なおパネル部全体の製造方法については上記した図11に準拠する。
【0065】
図15では、第1の透光性シート70に例えば、X方向に間隔を空けて配置された第1電極11(図1参照)を形成し、第2の透光性シート71に例えば、加飾印刷層51及びY方向に間隔を空けて配置された第2電極12(図1参照)を形成し、第1の透光性シート70側の第1電極11と第2の透光性シート71側の第2電極12とを対向させた状態で、第1の透光性シート70と第2の透光性シート71との間に透光性樹脂層72を成形している。なおパネル部全体の製造方法については上記した図11に準拠する。
【0066】
上記では、本実施形態の入力装置を車載用として説明したが、車載用に限定されるものでない。ただし車載用の入力装置に特に適している。
【符号の説明】
【0067】
F、F1、F2、F3 指
S1、S2 検知信号
1 入力装置
2、60 パネル部
3 操作表面
4 基板
5 平面部
6 凸部
8、50,61、70、71 透光性シート
10、41、52 静電容量センサ
11、12、42、53,62、63 電極
15、54、65 透光性樹脂層
20 光検知センサ
21、64 被膜
22 発光素子
23 受光素子
30 IC
36 操作表示
51 加飾印刷層
55 導電印刷層
56 メッキ層
【特許請求の範囲】
【請求項1】
操作体により操作される操作領域と、前記操作領域から下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサと、
前記操作領域から下方側に配置された発光素子と受光素子とを有して構成され、前記発光素子から前記操作領域に向けて発せられた光に基づく反射光を前記受光素子で受光することにより、前記操作体の検知情報を取得することができる光検知センサと、を有することを特徴とする入力装置。
【請求項2】
前記操作領域は接触、あるいは、近接操作、又は、前記接触及び前記近接操作を行う操作表面を有し、少なくとも前記発光素子は複数個、配置されており、前記光検知センサでは、前記操作体の前記操作表面から上方での操作位置が検知可能とされている請求項1記載の入力装置。
【請求項3】
前記発光素子からの光及び前記反射光を透過可能な透光性シートと、前記透光性シートの片面あるいは両面に設けられた前記静電容量センサを構成する電極とを有し、表面が前記操作表面とされたパネル部を備え、前記パネル部の下方側に、基板上に配置された前記光検知センサが設けられている請求項2記載の入力装置。
【請求項4】
前記発光素子からの光及び前記反射光を透過可能な透光性樹脂層が前記透光性シートに重ねて成形されている請求項3記載の入力装置。
【請求項5】
前記発光素子からの光及び前記反射光を透過可能な加飾印刷層が前記透光性シートに重ねて形成されている請求項3又は4に記載の入力装置。
【請求項6】
前記静電容量センサを構成する電極は、前記透光性シートに印刷形成されたものである請求項3ないし5のいずれか1項に記載の入力装置。
【請求項7】
前記電極は、導電印刷層と、前記導電印刷層よりも低抵抗のメッキ層との積層構造で形成される請求項6記載の入力装置。
【請求項8】
前記操作表面は、平面部と、前記平面部と連続的に形成された凸部、あるいは前記平面部と連続的に形成された凹部、又は前記凸部及び前記凹部と、を有し、前記静電容量センサは、前記操作表面の下方側にて、前記平面部から前記凸部、あるいは前記凹部、又は前記凸部及び前記凹部の起伏に沿って形成されている請求項2ないし7のいずれか1項に記載の入力装置。
【請求項9】
前記操作表面への操作に対する検知限界距離は、前記光検知センサのほうが、前記静電容量センサに比べて長い請求項2ないし8のいずれか1項に記載の入力装置。
【請求項10】
前記静電容量センサの前記検知限界距離を越えた位置に前記操作体があるときの前記操作体の動作検知が前記光検知センサの検知結果に基づいて行われる請求項9記載の入力装置。
【請求項11】
前記光検知センサからの検知情報により、前記操作表面に所定の情報を表示する請求項2ないし10のいずれか1項に記載の入力装置。
【請求項12】
前記操作表面から離れた位置にある前記操作体が前記操作表面に所定距離近づいたことを前記光検知センサにより検知した際、前記操作表面に所定の情報を表示する請求項11記載の入力装置。
【請求項13】
前記光検知センサの前記操作体に対する検知情報は、前記静電容量センサによる前記操作体の位置検知の際に補完的に用いられる請求項1ないし12のいずれか1項に記載の入力装置。
【請求項1】
操作体により操作される操作領域と、前記操作領域から下方側に配置され、前記操作体の操作位置を検知可能な静電容量センサと、
前記操作領域から下方側に配置された発光素子と受光素子とを有して構成され、前記発光素子から前記操作領域に向けて発せられた光に基づく反射光を前記受光素子で受光することにより、前記操作体の検知情報を取得することができる光検知センサと、を有することを特徴とする入力装置。
【請求項2】
前記操作領域は接触、あるいは、近接操作、又は、前記接触及び前記近接操作を行う操作表面を有し、少なくとも前記発光素子は複数個、配置されており、前記光検知センサでは、前記操作体の前記操作表面から上方での操作位置が検知可能とされている請求項1記載の入力装置。
【請求項3】
前記発光素子からの光及び前記反射光を透過可能な透光性シートと、前記透光性シートの片面あるいは両面に設けられた前記静電容量センサを構成する電極とを有し、表面が前記操作表面とされたパネル部を備え、前記パネル部の下方側に、基板上に配置された前記光検知センサが設けられている請求項2記載の入力装置。
【請求項4】
前記発光素子からの光及び前記反射光を透過可能な透光性樹脂層が前記透光性シートに重ねて成形されている請求項3記載の入力装置。
【請求項5】
前記発光素子からの光及び前記反射光を透過可能な加飾印刷層が前記透光性シートに重ねて形成されている請求項3又は4に記載の入力装置。
【請求項6】
前記静電容量センサを構成する電極は、前記透光性シートに印刷形成されたものである請求項3ないし5のいずれか1項に記載の入力装置。
【請求項7】
前記電極は、導電印刷層と、前記導電印刷層よりも低抵抗のメッキ層との積層構造で形成される請求項6記載の入力装置。
【請求項8】
前記操作表面は、平面部と、前記平面部と連続的に形成された凸部、あるいは前記平面部と連続的に形成された凹部、又は前記凸部及び前記凹部と、を有し、前記静電容量センサは、前記操作表面の下方側にて、前記平面部から前記凸部、あるいは前記凹部、又は前記凸部及び前記凹部の起伏に沿って形成されている請求項2ないし7のいずれか1項に記載の入力装置。
【請求項9】
前記操作表面への操作に対する検知限界距離は、前記光検知センサのほうが、前記静電容量センサに比べて長い請求項2ないし8のいずれか1項に記載の入力装置。
【請求項10】
前記静電容量センサの前記検知限界距離を越えた位置に前記操作体があるときの前記操作体の動作検知が前記光検知センサの検知結果に基づいて行われる請求項9記載の入力装置。
【請求項11】
前記光検知センサからの検知情報により、前記操作表面に所定の情報を表示する請求項2ないし10のいずれか1項に記載の入力装置。
【請求項12】
前記操作表面から離れた位置にある前記操作体が前記操作表面に所定距離近づいたことを前記光検知センサにより検知した際、前記操作表面に所定の情報を表示する請求項11記載の入力装置。
【請求項13】
前記光検知センサの前記操作体に対する検知情報は、前記静電容量センサによる前記操作体の位置検知の際に補完的に用いられる請求項1ないし12のいずれか1項に記載の入力装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−58117(P2013−58117A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−196755(P2011−196755)
【出願日】平成23年9月9日(2011.9.9)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]