
入力装置
【課題】 固定された操作体または移動範囲が限られた操作体の操作面に指を触れて、指を操作面に沿って移動させたときに、操作面が指の移動に追従して移動しているように感じさせることができる入力装置を提供する。
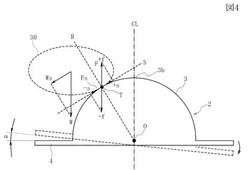
【解決手段】 半球面の操作面3を有する操作体2が、わずかな角度αだけ傾くことができるように支持されている。加振装置により操作体2に対して振幅Fが上下に向く連続震動が与えられる。操作面3に指30が触れると、連続振動によって、指30の接触部Tに、接線Sに向く振幅成分Fsが発生するため、指30を移動させるときに、操作面3が指30の移動に追従してあたかも回転しているかのような感触を得ることができる。
【解決手段】 半球面の操作面3を有する操作体2が、わずかな角度αだけ傾くことができるように支持されている。加振装置により操作体2に対して振幅Fが上下に向く連続震動が与えられる。操作面3に指30が触れると、連続振動によって、指30の接触部Tに、接線Sに向く振幅成分Fsが発生するため、指30を移動させるときに、操作面3が指30の移動に追従してあたかも回転しているかのような感触を得ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固定されまたは限られた距離しか動かないように規制された操作体を有し、その操作体の表面の操作面に指を摺動させて入力操作を行う入力装置に係るものであり、特に、操作面に沿って指を摺動させたときに、操作面が動いているかのような感触を指に与えることができる入力装置に関する。
【背景技術】
【0002】
指で操作する操作体と、この操作体に衝撃力や振動を与える加振装置とを備えた入力装置が、以下の特許文献1と特許文献2に記載されている。
【0003】
特許文献1に記載されたトラックボール装置は、多方向へ自由に回転するボールと、ボールの回転方向と回転距離を検知するエンコーダと、ボールに力を与えるソレノイドとを有している。ボールを操作しているときにソレノイドからボールに対して、不定期(非周期的)に力が与えられ、ボールを操作している指でソレノイドの力を感じることができるようになっている。
【0004】
特許文献1に記載されているトラックボール装置は、指でボールを回転させることで、画面に表示された項目を選択したり、画面に表示されているスクロールバーを移動させることができる。そして、選択された前記項目が移り変わるときに、ソレノイドからボールに一瞬の力が与えられ、またはスクロールバーがその移動終端に至ると、ソレノイドからボールに一瞬の力が与えられる。
【0005】
特許文献2に記載されている入力装置は、輪形状や直線形状の凹部と、容量結合された電極が設けられている。指を凹部に触れた状態で凹部に沿って移動させると、指の位置と指の移動が前記電極で検知される。すなわち、操作体である凹部そのものが動くことはなく、指を凹部に触れて摺動させることで、入力操作が行われる。
【0006】
この入力装置に振動子が設けられており、凹部に触れた指が一定距離だけ移動すると、振動子にパルスが与えられて振動子が一時的に振動し、凹部に一時的な振動が与えられる。これにより、凹部に触れた指にクリック感が与えられ、指が一定距離動いたことを操作者が感知できるようになっている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平11−305938号公報
【特許文献2】特開2003−337649号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に記載されたトラックボール装置は、指でボールを回転させる方式であるため、ボールを回転自在に支持するための機構が必要となり、構造が複雑である。また、トラックボール装置は、ボールの直径を超える高さ寸法が必要であるため、薄型の機器に搭載することができない。また、ボール表面に付着したゴミや埃が、ボールの回転に伴って装置の内部に巻き込まれやすい欠点を有している。
【0009】
特許文献2に記載された入力装置は、輪形状や直線形状の凹部に指を触れてその表面を摺動させる方式あるため、回転支持機構が不要であり、全体を薄型に構成しやすい。しかし、指を凹部に触れて摺動させるときに指に摩擦反力が作用するため、実際にボールが回転するものなどに比べて操作感触が悪くなる。また、指を平面的に摺動させて操作するのみであって、指を立体的に移動させる操作を行うことができず、操作入力の多様性に対応しにくい。
【0010】
特許文献1のトラックボール装置には、ボールに力を与えるソレノイドが設けられ、特許文献2の入力装置には、凹部に振動を与える振動子が設けられている。しかし、前記ソレノイドは、画面に表示された項目が移り変わるときなどに不定期に力を発揮するものである。また、前記振動子は、指が一定量移動したときに一瞬の振動を与えるものであり、凹部を摺動させる指の移動速度に応じて振動が発生する間隔が変化するものであって、やはり不定期の振動しか発生することができない。
【0011】
本発明は上記従来の課題を解決するものであり、指で操作面を操作したときに、動くことができない、あるいは限られた距離しか動くことができない操作体を備えた入力装置において、指を操作面に摺動させているときに、あたかも操作面が動いているかのような感触を与えることができる入力装置を提供することを目的としている。
【課題を解決するための手段】
【0012】
本発明は、指が触れる操作面を有する操作体と、前記操作面に対する指による操作状態を検知する検出部材とを有する入力装置において、
前記操作体は、前記操作面に触れた指が前記操作面に沿って移動したときに動かないように固定され、または指が前記操作面に沿って移動する移動距離よりも短い距離だけしか動かないようにその動きが規制されており、
少なくとも指が前記操作面に触れている間に、前記操作体に対して予め決められた周波数の連続振動を与え続ける振動付与機構が設けられていることを特徴とするものである。
【0013】
本発明の入力装置は、固定されたまたは動き量が規制された操作体の表面の操作面に指を摺動させたときに、操作体が予め決められた周波数の連続振動を発生する。そのため、操作面と指との間の摩擦力が低減されて、操作面に指を摺動させるときに指に感じる抵抗力を低下させることができる。これにより、あたかも指とともの操作面が動いているかのような感覚を得ることができ、操作性を高めることができる。
【0014】
また、操作体は固定状態または動きが規制された状態であるため、操作体を移動させる支持機構が不要であり、従来のトラックボール装置のように、ボールに付着したゴミや埃が、装置内に巻き込まれるという問題が生じない。
【0015】
本発明は、前記操作面は、指が対向する方向へ向けて突出する突形状であり、例えば、前記操作面は球面の一部である。
【0016】
または、前記操作面は、指が対向する方向と逆向きに向けて窪む凹形状であってもよいし、前記操作面は、ほぼ平面形状であってもよい。
【0017】
本発明は、前記操作面が、指の移動距離よりも短い距離だけ動けるように、前記操作体が弾性体で支持されているものとして構成できる。
【0018】
本発明は、前記振動付与機構を制御して、前記振動付与機構で前記連続振動を発生させるとともに、指による所定の操作が行われたときに、前記振動付与機構から前記操作体に対して不定期な振動を与える制御部が設けられているものとして構成できる。
【0019】
本発明は、好ましくは前記振動付与機構から前記操作体に対して、前記操作面での指の移動方向に沿う振幅成分を含んだ連続振動が与えられるものである。
【0020】
例えば、前記操作面は、前記振動付与機構から前記操作体に与えられる連続振動の振幅方向に対して傾斜する傾斜面を少なくとも一部に有しているものである。
【0021】
前記検出部材は、前記操作面が指で押されたのを検知する圧力センサである。あるいは、前記検出部材は、指の接近と移動を検出する静電センサである。
【発明の効果】
【0022】
本発明の入力装置は、操作体が自由に移動できる構造ではなくても、操作体の表面の操作面に指を摺動させたときの抵抗力を小さくして、あたかも操作面が指に追従しているかのような操作感触を得ることができる。
【0023】
また、操作体を自由に回転できるように支持する支持機構が不要であるため構造を簡単にでき、また薄型化も実現しやすい。
【図面の簡単な説明】
【0024】
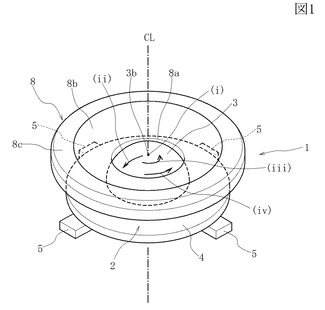
【図1】本発明の第1の実施の形態の入力装置を示す斜視図、
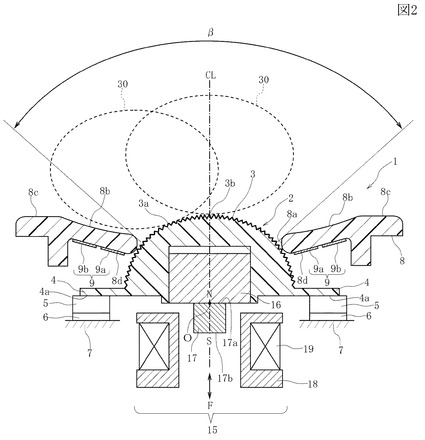
【図2】図1に示す入力装置の縦断面図、
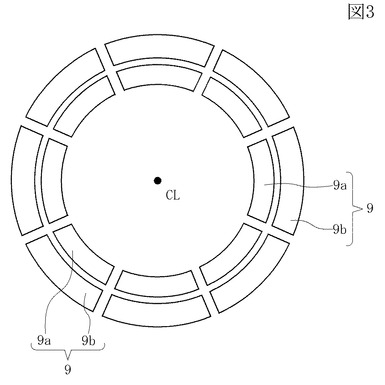
【図3】図1に示す入力装置に設けられた静電センサの平面図、
【図4】図1に示す入力装置の動作説明図、
【図5】入力装置の回路構成図、
【図6】本発明の第2の実施の形態の入力装置を示す断面図、
【図7】本発明の第3の実施の形態の入力装置を示す断面図、
【図8】本発明の第4の実施の形態の入力装置を示す断面図、
【発明を実施するための形態】
【0025】
図1と図2に示す入力装置1は操作体2を有している。操作体2は、合成樹脂製または金属製である。操作体2はその表面形状が球面の一部となる突形状の操作面3を有している。操作面3は、球体の表面の全周の角度である360度より浅い角度で形成されており、図2に示す例では、操作面3が、球体の表面のほぼ半分の面積を有している。操作面3はその表面に細かな凹凸面3aを有しており。指30を触れたときの摩擦係数を小さくできるようになっている。
【0026】
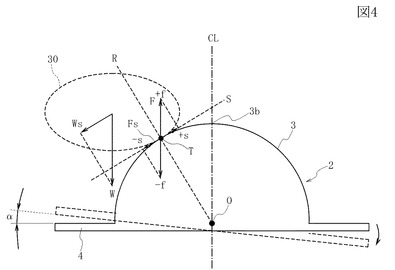
操作体2は動くことができないように固定されていてもよいが、実施の形態の入力装置1では、図4に示すように、全ての方向へ角度αだけ傾くことができるようになっている。操作体2が傾くことができる角度αは、図2に示す操作面3の指30で操作可能な角度範囲βよりも十分に小さい値である。前記角度αは、5度以下が好ましく、3度以下がさらに好ましい。
【0027】
操作体2は、フランジ部4を有している。図2には、操作面3を構成する球面の曲率中心Oを通って垂直に延びる中心線CLが示されているが、前記フランジ部4は、中心線CLに対して垂直な向きで、中心線CLの回りの360度の全周にわたって連続して形成されている。
【0028】
入力装置1の基台7に、弾性部材6が固定されて、その表面に第1の検出部材である圧力センサ5が固定されており、操作体2のフランジ部4の下面4aが圧力センサ5の上に設置されている。弾性部材6は合成ゴムシートや発泡樹脂材料のシートである。圧力センサ5は、MEMSセンサであり、基板の上に微小な空隙を介して対向する作用板が設けられ、フランジ部4で作用板が押されたときの作用板の撓みが圧電素子などで検出されるものである。
【0029】
図1に示すように、弾性部材6と圧力センサ5は、フランジ部4の円周方向に沿って90度間隔で4組配置されている。前記弾性部材6が設けられていることで、図4に示すように、操作体2がその中心線CLをどの方向へでも角度αだけ倒すことができるように傾斜自在に支持されている。また、操作体2に対して中心線CLが倒れる向きに与えられた力の向きとその大きさが4個の圧力センサ5のいずれかによって検知できるようになっている。また、操作体2が真下に向けて押されたときは、4個の押圧センサ5で、その押圧力を検知することができる。
【0030】
図1と図2に示すように、操作体2の周囲にカバー部材8が設けられている。カバー部材8は合成樹脂材料で形成されている。カバー部材8の中心部に穴8aが形成されている。カバー部材8は、中心線CLから離れた位置に外周表面8cを有しており、外周表面8cは、中心線CLと垂直な平面である。カバー部材8の表面には、外周表面8cから穴8aに向かって凹曲面8bが形成されている。凹曲面8bは、操作面3の球面よりも大きな曲率の凹球面の一部である。カバー部材8の表面は、外周表面8cが最も指30による操作側に出ており、穴8aが外周表面8cよりも非操作側に退行した位置にある。
【0031】
操作体2の操作面3はカバー部材8の穴8aの内部に位置しており、操作面3の球面の頂部3bが、穴8aよりも操作側へ突出した位置にある。また前記凹曲面8bは、穴8aから突出している操作面3の周囲を囲むように位置しており、操作体2の操作面3が指30で操作されるときに、その指30が凹曲面8bに接近し、または凹曲面8bに接触できる。
【0032】
図2に示すように、カバー部材8の前記凹曲面8bと逆側の裏面8dに第2の検出部材である静電センサ9が設けられている。図3の平面図に示すように、静電センサ9は複数設けられており、中心線CLに近い位置で中心線CLを囲むように配置された複数の内周側静電センサ9aと、中心線CLから離れた位置で中心線CLを囲むように配置された複数の外周側静電センサ9bとを有している。内周側静電センサ9aと外周側静電センサ9bは、それぞれ円周方向へ等ピッチで8個ずつ配置されている。
【0033】
内周側静電センサ9aと外周側静電センサ9bは、互いに独立した導電体層を有している。図3は、それぞれの静電センサ9に設けられた導電体層の配置を示している。図5に示すように、それぞれの静電センサ9の導電体層に静電検出回路21が接続されている。この静電検出回路21から静電センサ9の導電体層へパルス状の駆動電流が与えられる。指30が導電体層に接近していると、導電体層と指30との間に容量が結合され、この結合容量と抵抗器とで遅延回路が形成されて、前記パルス状の駆動電流によって導電体層から導き出される検出電流の立ち上がり時間が遅延する。この検出電流の立ち上がり時間は、内周側静電センサ9aまたは外周側静電センサ9bの導電体層に対する指30の接近距離に応じて変化する。
【0034】
図5に示すように、1つの静電検出回路21から、複数の内周側静電センサ9aおよび複数の外周側静電センサ9bの導電体層に対してパルス電流が順番に与えられ、それぞれの導電体層から検出電流が時分割で前記静電検出回路21で検出される。これにより、指30が操作面3の表面のどの位置に触れているかを検知することができる。
【0035】
図2に示すように、入力装置1に、操作体2に振動を与える加振装置15が設けられている。加振装置15は、操作体2の背部に埋設された磁性体のヨーク16とその背部に固定された磁石17と、入力装置1の基台7に固定された非磁性のボビン18と、ボビン18に巻かれたコイル19とを有している。前記磁石17は、ボビン18の中心穴の内部に位置しており、上面17aと下面17bが異なる磁極に着磁されている。この加振装置15は、コイル19に所定周期の交流電流が与えられると、操作体2に対して振幅Fの向きが中心線CLに沿う方向となる振動が与えられる。
【0036】
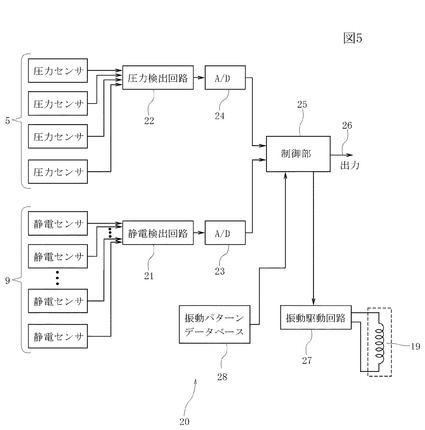
図5に、入力装置1に設けられる検出・駆動回路20が示されている。前述のように、複数の静電センサ9には静電検出回路21が接続されている。また、4箇所に設けられた圧力センサ5に圧力検出回路22が接続されている。この圧力検出回路22は、4つの圧力センサ5のそれぞれから時分割で検知出力を得るようになっている。
【0037】
静電検出回路21で得られた検知出力は、A/D変換部23を経て制御部25に与えられ、圧力検出回路22で得られた検知出力は、A/D変換部24を経て制御部25に与えられる。制御部25はマイクロコンピュータのCPUとメモリとで構成されている。制御部25では、静電検出回路21で得られた検知出力から、操作体2の操作面3に触れている指30がどの方向へどの距離だけ移動しているかが演算され、また、圧力検出回路22で得られた検知出力から、指30によって操作体2がどの向きに押されているかが演算されて、その演算出力26が、この入力装置1を搭載した電子機器の主制御部に与えられる。そして、電子機器に設けられた画面の表示内容が、前記演算出力26によって制御される。
【0038】
図5に示す検出・駆動回路20では、制御部25から振動駆動回路27にパルス状の駆動指令が与えられて、加振装置15のコイル19に交流の駆動電流が与えられる。制御部25のいずれかのメモリ内に振動パターンデータベース28が格納されている。この振動パターンデータベース28には、種々の振動パターンに対応するパルス波形が格納されている。
【0039】
次に、前記入力装置1の動作を説明する。
指30が、操作体2に操作面3に接近すると、複数の静電センサ9のいずれかがこれを検知し制御部25がその接近を知ることができる。または、指30が操作面3に接触し操作体2が軽く押されると、複数の圧力センサ5のいずれかがこれを検知し、制御部25において、指30が操作面3に触れていることを知ることができる。
【0040】
制御部25では、指が操作面3に接近しまたは接触したと判断すると、振動駆動回路27に指令が出され、振動駆動回路27からコイル19に駆動電流が与えられて、操作体2に振動が与えられる。このとき、制御部25により振動パターンデータベース28から連続振動のパルスパターンが呼び出されて振動駆動回路27に与えられ、操作体2に対し、振幅Fが中心線CLに沿う向きの連続振動が与えられる。すなわち、振動パターンデータベース28に格納されている予め決められた周波数の連続パルスが振動駆動回路27に与えられて、コイル19に連続する交流駆動電流が与えられ、操作体2が連続振動する。ここでの連続振動とは、操作面3に触れている指30に振動が途切れる感覚を与えることなく、または間欠的な衝撃を感じさせることなく、連続する振動を感じさせることができる状態を意味している。
【0041】
基本的な振動パターンとしては、一定の周波数のパルスが途切れることなく振動駆動回路27に与えられる。このときのパルス周波数は、50〜100Hz程度が好ましい。操作体2に一定の周期の連続振動が与えられていると、操作面3に触れた指を各方向へ向けて摺動させるときに、操作面3が指30の移動方向へ追従してあたかも回転しているように、指30に感じさせることができる。すなわち、操作面3が指30に感じる周波数で連続振動していると、操作面3と指30との間の摩擦抵抗力が低下し、指30を操作面3に沿って摺動させたときに、指30と操作面3との接触部に大きな抵抗力が作用しなくなり、その結果、指30と共に操作面3が球体として回転しているかのような感触を得ることができる。
【0042】
特に、図2に示すように、操作面3に凹凸面3aを形成しておくと、操作面3が振動したときに、さらに操作面3と指30との間の摩擦力が低下し、指30の移動に追従して操作面3が回転しているような感覚を得やすくなる。前記凹凸面3aは、操作面3が鏡面状態ではなく、指30と操作面3とを密着しにくくするためのものであり、中心線平均粗さは例えば10〜100μm程度が好ましい。
【0043】
操作体2に与えられる振動は、操作面3のどの位置に指30が触れていようと途切れることがなく、操作面3に触れた指30がどの方向へどの速度でどれだけの距離を移動していようと一定の周波数で連続して与えられる。すなわち、操作面3に対する指30の操作位置や摺動速度とは無関係に、操作体2に対して、振動パターンデータベース28に格納された予め決められた一定の周波数の振動が連続して与えられる。
【0044】
一方、前記特許文献1や特許文献2に記載された入力装置は、画面の項目が切り換わったり、指が一定の距離だけ動く度に、一瞬の衝撃的な力や振動が指に与えられて指にクリック感触を与えるものである。このクリック感触のための振動は、あくまでも不定期に、入力装置に対する操作状態や画面の状態に合わせて与えられるものであり、実施の形態の入力装置1のように、操作面3に触れている指30の移動状態に拘束されることなく、操作体2に予め決められた周波数の振動が連続的に与えられ続けることと、全く相違している。
【0045】
指30が操作面3に触れているときに、操作体2に与えられる連続振動は、前記のように一定の周波数の連続振動であることが基本であるが、さらに操作面3において指30が触れている位置に応じて振動の周波数を可変することも可能である。例えば、図1に示すように、指30が操作面3の頂部3bに触れまたは頂部3bに近い場所(i)に触れているときから、指30が操作面3の裾部に近い位置(ii)へ移動させたときに、その移動に伴って、振動の周波数を変えてもよい。または、図1に示すように、操作面3に触れた指30を、頂部3bに近い軌跡(iii)で周回させているときと、裾部に近い軌跡(iv)で周回させているときとで、振動の周波数を変えることも可能である。
【0046】
ただし、指30が操作面3に触れているときに、振動の周波数を可変させる制御を行う場合に、指30に対して振動が途切れる感触を与えないように、連続振動の中で、周波数を変化させることが必要である。この場合の振動周波数は、前述のように50〜100Hzの範囲の連続振動であることが好ましい。
【0047】
図4に示すように、操作面3は球面の一部であるため、頂部3bを除く広い範囲で、その表面は、連続振動の振幅Fの向きに対して傾く傾斜面(傾斜突面)となっている。この傾斜面に触れた指30を移動させると、操作面3が指30に追従して回転しているかのように感じる度合いがさらに大きくなる。
【0048】
図4に示すように、指30が操作面3の頂部3b以外の場所で接触している接触面積の中心を接触部Tとする。接触部Tにおいて操作面3に与えられている連続振動の振幅Fの向きは、上下方向すなわち中心線CLと平行な方向である。図4には、接触部Tを通過する法線Rと、接触部Tを通過する接線Sが示されているが、接触部Tにおいては操作面3の傾斜方向が接線Sの方向である。よって、接触部Tには、連続振動の振幅Fの分力である振幅成分Fsが接線Sの向きに沿って与え続けられている。
【0049】
接触部Tにおいて操作面3から指30に与えられる振幅F方向である上下方向の力は+fと−fであり、その絶対値「f」は同じである。指30に与えられている力が+fのとき、接触部Tでは指30に対して力+fの接線S方向の分力+sが作用し、指30に与えられている力が−fのとき、接触部Tでは指30に対して接線S方向の分力−sが作用する。
【0050】
指30を頂部3bからフランジ部4に向けて摺動させるときは、指30から操作面3に下向きの力Wが与えられ、指30から操作面3に対して、接線Sの方向に向く分力Wsが与えられる。前記分力−sが指30の摺動力の分力Wsと同じ向きに作用しているため、接触部Tに触れた指30をフランジ部4に向けて摺動させているときに、操作面3が指30の摺動に追従してあたかも摺動方向へ回転しているような感触を得やすくなる。
【0051】
逆に、操作面3に触れている指30を、フランジ部4に近い裾部側から頂部3bに向けて摺動させているときも、その摺動力の接線Sに沿う分力と、連続振動の振幅Fによって接線Sに沿う向きに生じる前記分力+sとが同じ向きであるため、やはり、指30の移動に追従して操作面3が回転しているかのような感触を得やすくなる。
【0052】
さらに、操作体2は弾性部材6によって支持されており、図4に示すように、操作体2が小さな角度αだけ傾くことができる。操作面3に触れた指30を頂部3bから裾部に向けて摺動させ、または裾部から頂部3bに向けて摺動させるときに、操作面3に作用する力によって、操作面3が摺動方向へ角度αに相当する限られた短い距離だけ移動する。この操作面3の移動と、接線Sに沿う振幅成分Fsの双方の作用によって、さらに、操作面3が回転しているかのような感触を指30に与えやすくなる。
【0053】
このときの角度αは、操作体2の傾き方向の動きを指30がわずかに感じる程度であり、前述のように、前記角度αは、5度以下が好ましく、3度以下がさらに好ましい。
【0054】
図1に示すように、操作面3に触れた指30を頂部3bから裾部に向けて摺動させ、または裾部から頂部3bに向けて摺動させ、あるいは軌跡(iii)または軌跡(iv)に沿って摺動させると、図3のパターンで配列した内周側静電センサ9aと外周側静電センサ9bのそれぞれのセンサからの検知出力が変化し、この検知出力の変化によって、トラックボール装置においてボールを回転させているのと同じような入力を行うことができる。
【0055】
また、指30が操作面3を摺動するときに、操作体2に作用する力の向きとその大きさが圧力センサ5で検知される。この検知出力によっても、指30の摺動方向とそのときに操作面3に与えられている力を検知することができる。
【0056】
さらに、操作面3の頂部3bに触れた指30によって、操作体2の全体を下向きに押圧するスイッチ動作を行うことが可能である。この場合には、4個の圧力センサ5の全てが所定の圧力を検知したときに、制御部25においてスイッチ操作が行われたと判断する。このとき、制御部25は、振動パターンデータベース28からスイッチ操作のクリック感触を設定するパターンの振動パルスを呼び出して振動駆動回路27に与え、振動駆動回路27からコイル19に駆動電流が与えられる。このとき、連続するパルスが短時間だけ振動駆動回路27に与えられ、操作体2に対して一瞬の衝撃的な振動が与えられる。これにより、指30がスイッチ操作の反力を受けたような衝撃を感じることができる。
【0057】
このスイッチ反力を生じさせる振動は、操作体2によってスイッチ操作が行われたときに不定期に発生するものであり、操作面3があたかも回転するように感じさせる連続振動とは異なるものである。操作体2に対しては、回転を感じさせる連続振動に、スイッチ反力のための不定期な振動が重畳されて与えられる。
【0058】
さらに、振動パターンデータベース28に格納されている振動パターンによって、特許文献1に記載されているように、電子機器の画面に表示されたメニューなどの項目が切換えられたときに、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよいし、画面のスクロールバーがその終点位置に移動したときに、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよい。または、特許文献2に記載されているように、操作面3に触れた指が操作面3に沿って一定の距離だけ移動する度に、すなわち操作面3があたかも一定の距離だけ回転したと感じられる度に、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよい。これらのケースでは、それぞれの衝撃的な振動は、操作面3があたかも回転するように感じさせる連続振動に重畳されて操作体2に与えられる。
【0059】
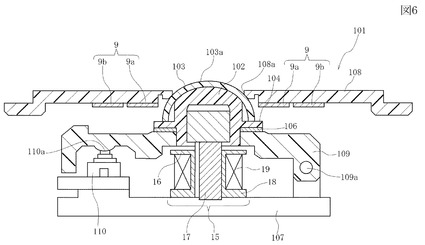
図6に示す第2の実施の形態の入力装置101は、操作体102の表面にシート状の静電センサ103が取り付けられ、その表面が球面形状に突出する操作面103aとなっている。操作面103aは、カバー部材108の穴108aから上方へ突出している。静電センサ103は、複数のX電極と複数のY電極が、誘電体を挟んで互いに直交して配置されて、さらに表面が絶縁層で覆われている。それぞれの電極に選択的にパルス状の駆動電圧が与えられ、操作面103aに接地電位に近い電位の指が触れると、指に近い電極から指に瞬間的に電流が逃げる。どの電極に駆動電圧を与えたときに電流が変化したかを検知することで、操作面103aのどの位置に指が接触しているのかを認識することができる。
【0060】
カバー部材108の裏面には、図3に示したのと同じ静電センサ9が設けられている。操作面103aを構成する静電センサ103と、カバー部材108に設けられた静電センサ9とで、操作面103aのどの位置に指が触れているか、ならびに操作面103aに沿ってどの向きに指が摺動しているかを検知することができる。
【0061】
操作体102のフランジ部104は、合成ゴムや発泡樹脂材料の弾性部材106を介して、可動基台109に設置されている。可動基台109の右端部は、固定基台107に軸109aを介して回動自在に支持されている。可動基台109の左端部と固定基台107との間に押圧スイッチ110が設けられている。押圧スイッチ110は機械式であり、上部にアクチュエータ110aが進退自在に取り付けられ、内蔵されたばね部材でアクチュエータ110aが突出方向へ付勢されている。また、押圧スイッチ110の内部に、アクチュエータ110aが押されたときに接触する接点が設けられている。
【0062】
また、固定基台107と操作体102との間に、図2に示したのと同じ構造の加振装置15が設けられている。
【0063】
この入力装置101は、静電センサ103および静電センサ9で指が接近したことが検知されると、加振装置15が始動し、操作体102に連続する振動が与えられる。そのため、指を操作面103aに沿って摺動させたときに、操作面103aが指の移動に追従して回転しているかのように感じることができる。また、静電センサ103および静電センサ9で指の移動位置を知ることができ、指の移動に応じて、電子機器の画面でカーソルを移動させたり、画面を変化させることができる。
【0064】
また、操作体102が押されると、押圧スイッチ110が動作し、スイッチ入力が行われるとともに、押圧スイッチ110に内蔵されたばねにより、操作面103aを押す指に、機械的なスイッチ反力の感触(クリック感触)を与えることができる。
【0065】
なお、図6に示す入力装置101に、図2に示す圧力センサ5を装備させて、操作面103aが軽い力で押されたときは、圧力センサ5でこれを検知し、加振装置15から操作体102に与えられる瞬間的な振動で指にスイッチ反力を感じさせ、操作面103aがさらに強い力で押されると、押圧スイッチ110が動作して、指で機械的なスイッチ反力を感じることができるようにしてもよい。
【0066】
図1ないし図4に示した第1の実施の形態の入力装置1と図6に示した第2の実施の形態の入力装置101は、突形状の操作面3,103aが球面の一部を構成しているが、突形状の操作面は、球面に限られるものではなく、突曲面形状であればよい。さらに操作面が円筒面の一部で、例えば円筒面の180度の角度部分で構成してもよい。この場合、操作体に連続振動を与えて、指を操作面に沿って移動させると、指において、操作面がローラの一部のように回転しているかのような感覚を得ることが可能である。
【0067】
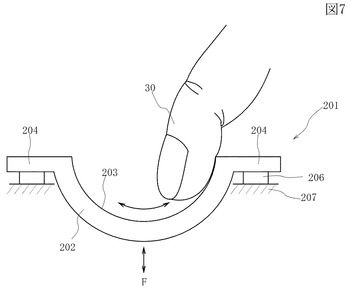
図7に示す第3の実施の形態の入力装置201は、操作体202の表面の操作面203が凹曲面であり、凹球面の一部、すなわちほぼ半球の凹面となっている。操作面203にシート状の静電センサが凹曲面に沿って取り付けられている。この静電センサの検知方式は、図6に示した静電センサ103と同種のものである。操作体202のフランジ部204は、弾性部材206を介して基台207に支持されている。
【0068】
操作体202と基台207との間に加振装置15が設けられており、指30が操作面203に接触しているときに、操作体202に対して振幅Fが垂直方向に向けられた連続振動が与えられる。よって、凹曲面の操作面203に指30を触れて摺動させると、指30の移動に追従して半球の凹曲面が回転しているかのような感触を得ることができる。
【0069】
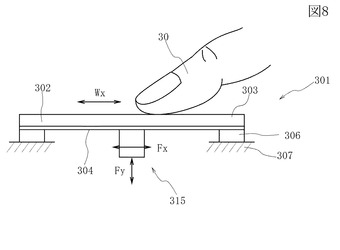
図8に示す第4の実施の形態の入力装置301は、操作体302が細長形状であり、その表面の操作面303がほぼ平面形状である。操作体302の背面に、静電センサ304が取り付けられている。この静電センサ304は、図6に示す静電センサ103と同種のものであり、操作面303に指30が接触している位置およびその移動方向を検知することができる。
【0070】
操作体302は、基台307に弾性部材306を介して支持されている。操作体302と基台307との間に加振装置315が設けられている。この加振装置315によって、操作体302に連続信号が与えられる。この連続振動の振幅方向は、操作面303に垂直なFy方向および操作面303に平行なFx方向である。Fy方向の振幅の振動とFx方向の振幅の振動は連続的に与えられ、その合成振動の振幅方向は、操作面303に対して斜めに与えられる。すなわち、操作面303は、加振装置315から与えられる振動の振幅方向に対して傾斜した傾斜面となっている。
【0071】
したがって、操作面303に触れた指30を、操作面303に沿ってWx方向へ移動させるときに、操作面303がWx方向に沿う振幅成分を有しているため、あたかも操作面303が指30に追従してWx方向へ動いているかのような感触を得ることが可能である。
【符号の説明】
【0072】
1 入力装置
2 操作体
3 操作面
3b 頂部
4 フランジ部
5 圧力センサ
6 弾性部材
8 カバー部材
9 静電センサ
15 加振装置
30 指
101 入力装置
102 操作体
103 静電センサ
103a 操作面
110 押圧スイッチ
201 入力装置
202 操作体
203 操作面
301 入力装置
302 操作体
303 操作面
304 静電センサ
315 加振装置
F 振幅
Fs 振幅成分
T 接触部
【技術分野】
【0001】
本発明は、固定されまたは限られた距離しか動かないように規制された操作体を有し、その操作体の表面の操作面に指を摺動させて入力操作を行う入力装置に係るものであり、特に、操作面に沿って指を摺動させたときに、操作面が動いているかのような感触を指に与えることができる入力装置に関する。
【背景技術】
【0002】
指で操作する操作体と、この操作体に衝撃力や振動を与える加振装置とを備えた入力装置が、以下の特許文献1と特許文献2に記載されている。
【0003】
特許文献1に記載されたトラックボール装置は、多方向へ自由に回転するボールと、ボールの回転方向と回転距離を検知するエンコーダと、ボールに力を与えるソレノイドとを有している。ボールを操作しているときにソレノイドからボールに対して、不定期(非周期的)に力が与えられ、ボールを操作している指でソレノイドの力を感じることができるようになっている。
【0004】
特許文献1に記載されているトラックボール装置は、指でボールを回転させることで、画面に表示された項目を選択したり、画面に表示されているスクロールバーを移動させることができる。そして、選択された前記項目が移り変わるときに、ソレノイドからボールに一瞬の力が与えられ、またはスクロールバーがその移動終端に至ると、ソレノイドからボールに一瞬の力が与えられる。
【0005】
特許文献2に記載されている入力装置は、輪形状や直線形状の凹部と、容量結合された電極が設けられている。指を凹部に触れた状態で凹部に沿って移動させると、指の位置と指の移動が前記電極で検知される。すなわち、操作体である凹部そのものが動くことはなく、指を凹部に触れて摺動させることで、入力操作が行われる。
【0006】
この入力装置に振動子が設けられており、凹部に触れた指が一定距離だけ移動すると、振動子にパルスが与えられて振動子が一時的に振動し、凹部に一時的な振動が与えられる。これにより、凹部に触れた指にクリック感が与えられ、指が一定距離動いたことを操作者が感知できるようになっている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平11−305938号公報
【特許文献2】特開2003−337649号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に記載されたトラックボール装置は、指でボールを回転させる方式であるため、ボールを回転自在に支持するための機構が必要となり、構造が複雑である。また、トラックボール装置は、ボールの直径を超える高さ寸法が必要であるため、薄型の機器に搭載することができない。また、ボール表面に付着したゴミや埃が、ボールの回転に伴って装置の内部に巻き込まれやすい欠点を有している。
【0009】
特許文献2に記載された入力装置は、輪形状や直線形状の凹部に指を触れてその表面を摺動させる方式あるため、回転支持機構が不要であり、全体を薄型に構成しやすい。しかし、指を凹部に触れて摺動させるときに指に摩擦反力が作用するため、実際にボールが回転するものなどに比べて操作感触が悪くなる。また、指を平面的に摺動させて操作するのみであって、指を立体的に移動させる操作を行うことができず、操作入力の多様性に対応しにくい。
【0010】
特許文献1のトラックボール装置には、ボールに力を与えるソレノイドが設けられ、特許文献2の入力装置には、凹部に振動を与える振動子が設けられている。しかし、前記ソレノイドは、画面に表示された項目が移り変わるときなどに不定期に力を発揮するものである。また、前記振動子は、指が一定量移動したときに一瞬の振動を与えるものであり、凹部を摺動させる指の移動速度に応じて振動が発生する間隔が変化するものであって、やはり不定期の振動しか発生することができない。
【0011】
本発明は上記従来の課題を解決するものであり、指で操作面を操作したときに、動くことができない、あるいは限られた距離しか動くことができない操作体を備えた入力装置において、指を操作面に摺動させているときに、あたかも操作面が動いているかのような感触を与えることができる入力装置を提供することを目的としている。
【課題を解決するための手段】
【0012】
本発明は、指が触れる操作面を有する操作体と、前記操作面に対する指による操作状態を検知する検出部材とを有する入力装置において、
前記操作体は、前記操作面に触れた指が前記操作面に沿って移動したときに動かないように固定され、または指が前記操作面に沿って移動する移動距離よりも短い距離だけしか動かないようにその動きが規制されており、
少なくとも指が前記操作面に触れている間に、前記操作体に対して予め決められた周波数の連続振動を与え続ける振動付与機構が設けられていることを特徴とするものである。
【0013】
本発明の入力装置は、固定されたまたは動き量が規制された操作体の表面の操作面に指を摺動させたときに、操作体が予め決められた周波数の連続振動を発生する。そのため、操作面と指との間の摩擦力が低減されて、操作面に指を摺動させるときに指に感じる抵抗力を低下させることができる。これにより、あたかも指とともの操作面が動いているかのような感覚を得ることができ、操作性を高めることができる。
【0014】
また、操作体は固定状態または動きが規制された状態であるため、操作体を移動させる支持機構が不要であり、従来のトラックボール装置のように、ボールに付着したゴミや埃が、装置内に巻き込まれるという問題が生じない。
【0015】
本発明は、前記操作面は、指が対向する方向へ向けて突出する突形状であり、例えば、前記操作面は球面の一部である。
【0016】
または、前記操作面は、指が対向する方向と逆向きに向けて窪む凹形状であってもよいし、前記操作面は、ほぼ平面形状であってもよい。
【0017】
本発明は、前記操作面が、指の移動距離よりも短い距離だけ動けるように、前記操作体が弾性体で支持されているものとして構成できる。
【0018】
本発明は、前記振動付与機構を制御して、前記振動付与機構で前記連続振動を発生させるとともに、指による所定の操作が行われたときに、前記振動付与機構から前記操作体に対して不定期な振動を与える制御部が設けられているものとして構成できる。
【0019】
本発明は、好ましくは前記振動付与機構から前記操作体に対して、前記操作面での指の移動方向に沿う振幅成分を含んだ連続振動が与えられるものである。
【0020】
例えば、前記操作面は、前記振動付与機構から前記操作体に与えられる連続振動の振幅方向に対して傾斜する傾斜面を少なくとも一部に有しているものである。
【0021】
前記検出部材は、前記操作面が指で押されたのを検知する圧力センサである。あるいは、前記検出部材は、指の接近と移動を検出する静電センサである。
【発明の効果】
【0022】
本発明の入力装置は、操作体が自由に移動できる構造ではなくても、操作体の表面の操作面に指を摺動させたときの抵抗力を小さくして、あたかも操作面が指に追従しているかのような操作感触を得ることができる。
【0023】
また、操作体を自由に回転できるように支持する支持機構が不要であるため構造を簡単にでき、また薄型化も実現しやすい。
【図面の簡単な説明】
【0024】
【図1】本発明の第1の実施の形態の入力装置を示す斜視図、
【図2】図1に示す入力装置の縦断面図、
【図3】図1に示す入力装置に設けられた静電センサの平面図、
【図4】図1に示す入力装置の動作説明図、
【図5】入力装置の回路構成図、
【図6】本発明の第2の実施の形態の入力装置を示す断面図、
【図7】本発明の第3の実施の形態の入力装置を示す断面図、
【図8】本発明の第4の実施の形態の入力装置を示す断面図、
【発明を実施するための形態】
【0025】
図1と図2に示す入力装置1は操作体2を有している。操作体2は、合成樹脂製または金属製である。操作体2はその表面形状が球面の一部となる突形状の操作面3を有している。操作面3は、球体の表面の全周の角度である360度より浅い角度で形成されており、図2に示す例では、操作面3が、球体の表面のほぼ半分の面積を有している。操作面3はその表面に細かな凹凸面3aを有しており。指30を触れたときの摩擦係数を小さくできるようになっている。
【0026】
操作体2は動くことができないように固定されていてもよいが、実施の形態の入力装置1では、図4に示すように、全ての方向へ角度αだけ傾くことができるようになっている。操作体2が傾くことができる角度αは、図2に示す操作面3の指30で操作可能な角度範囲βよりも十分に小さい値である。前記角度αは、5度以下が好ましく、3度以下がさらに好ましい。
【0027】
操作体2は、フランジ部4を有している。図2には、操作面3を構成する球面の曲率中心Oを通って垂直に延びる中心線CLが示されているが、前記フランジ部4は、中心線CLに対して垂直な向きで、中心線CLの回りの360度の全周にわたって連続して形成されている。
【0028】
入力装置1の基台7に、弾性部材6が固定されて、その表面に第1の検出部材である圧力センサ5が固定されており、操作体2のフランジ部4の下面4aが圧力センサ5の上に設置されている。弾性部材6は合成ゴムシートや発泡樹脂材料のシートである。圧力センサ5は、MEMSセンサであり、基板の上に微小な空隙を介して対向する作用板が設けられ、フランジ部4で作用板が押されたときの作用板の撓みが圧電素子などで検出されるものである。
【0029】
図1に示すように、弾性部材6と圧力センサ5は、フランジ部4の円周方向に沿って90度間隔で4組配置されている。前記弾性部材6が設けられていることで、図4に示すように、操作体2がその中心線CLをどの方向へでも角度αだけ倒すことができるように傾斜自在に支持されている。また、操作体2に対して中心線CLが倒れる向きに与えられた力の向きとその大きさが4個の圧力センサ5のいずれかによって検知できるようになっている。また、操作体2が真下に向けて押されたときは、4個の押圧センサ5で、その押圧力を検知することができる。
【0030】
図1と図2に示すように、操作体2の周囲にカバー部材8が設けられている。カバー部材8は合成樹脂材料で形成されている。カバー部材8の中心部に穴8aが形成されている。カバー部材8は、中心線CLから離れた位置に外周表面8cを有しており、外周表面8cは、中心線CLと垂直な平面である。カバー部材8の表面には、外周表面8cから穴8aに向かって凹曲面8bが形成されている。凹曲面8bは、操作面3の球面よりも大きな曲率の凹球面の一部である。カバー部材8の表面は、外周表面8cが最も指30による操作側に出ており、穴8aが外周表面8cよりも非操作側に退行した位置にある。
【0031】
操作体2の操作面3はカバー部材8の穴8aの内部に位置しており、操作面3の球面の頂部3bが、穴8aよりも操作側へ突出した位置にある。また前記凹曲面8bは、穴8aから突出している操作面3の周囲を囲むように位置しており、操作体2の操作面3が指30で操作されるときに、その指30が凹曲面8bに接近し、または凹曲面8bに接触できる。
【0032】
図2に示すように、カバー部材8の前記凹曲面8bと逆側の裏面8dに第2の検出部材である静電センサ9が設けられている。図3の平面図に示すように、静電センサ9は複数設けられており、中心線CLに近い位置で中心線CLを囲むように配置された複数の内周側静電センサ9aと、中心線CLから離れた位置で中心線CLを囲むように配置された複数の外周側静電センサ9bとを有している。内周側静電センサ9aと外周側静電センサ9bは、それぞれ円周方向へ等ピッチで8個ずつ配置されている。
【0033】
内周側静電センサ9aと外周側静電センサ9bは、互いに独立した導電体層を有している。図3は、それぞれの静電センサ9に設けられた導電体層の配置を示している。図5に示すように、それぞれの静電センサ9の導電体層に静電検出回路21が接続されている。この静電検出回路21から静電センサ9の導電体層へパルス状の駆動電流が与えられる。指30が導電体層に接近していると、導電体層と指30との間に容量が結合され、この結合容量と抵抗器とで遅延回路が形成されて、前記パルス状の駆動電流によって導電体層から導き出される検出電流の立ち上がり時間が遅延する。この検出電流の立ち上がり時間は、内周側静電センサ9aまたは外周側静電センサ9bの導電体層に対する指30の接近距離に応じて変化する。
【0034】
図5に示すように、1つの静電検出回路21から、複数の内周側静電センサ9aおよび複数の外周側静電センサ9bの導電体層に対してパルス電流が順番に与えられ、それぞれの導電体層から検出電流が時分割で前記静電検出回路21で検出される。これにより、指30が操作面3の表面のどの位置に触れているかを検知することができる。
【0035】
図2に示すように、入力装置1に、操作体2に振動を与える加振装置15が設けられている。加振装置15は、操作体2の背部に埋設された磁性体のヨーク16とその背部に固定された磁石17と、入力装置1の基台7に固定された非磁性のボビン18と、ボビン18に巻かれたコイル19とを有している。前記磁石17は、ボビン18の中心穴の内部に位置しており、上面17aと下面17bが異なる磁極に着磁されている。この加振装置15は、コイル19に所定周期の交流電流が与えられると、操作体2に対して振幅Fの向きが中心線CLに沿う方向となる振動が与えられる。
【0036】
図5に、入力装置1に設けられる検出・駆動回路20が示されている。前述のように、複数の静電センサ9には静電検出回路21が接続されている。また、4箇所に設けられた圧力センサ5に圧力検出回路22が接続されている。この圧力検出回路22は、4つの圧力センサ5のそれぞれから時分割で検知出力を得るようになっている。
【0037】
静電検出回路21で得られた検知出力は、A/D変換部23を経て制御部25に与えられ、圧力検出回路22で得られた検知出力は、A/D変換部24を経て制御部25に与えられる。制御部25はマイクロコンピュータのCPUとメモリとで構成されている。制御部25では、静電検出回路21で得られた検知出力から、操作体2の操作面3に触れている指30がどの方向へどの距離だけ移動しているかが演算され、また、圧力検出回路22で得られた検知出力から、指30によって操作体2がどの向きに押されているかが演算されて、その演算出力26が、この入力装置1を搭載した電子機器の主制御部に与えられる。そして、電子機器に設けられた画面の表示内容が、前記演算出力26によって制御される。
【0038】
図5に示す検出・駆動回路20では、制御部25から振動駆動回路27にパルス状の駆動指令が与えられて、加振装置15のコイル19に交流の駆動電流が与えられる。制御部25のいずれかのメモリ内に振動パターンデータベース28が格納されている。この振動パターンデータベース28には、種々の振動パターンに対応するパルス波形が格納されている。
【0039】
次に、前記入力装置1の動作を説明する。
指30が、操作体2に操作面3に接近すると、複数の静電センサ9のいずれかがこれを検知し制御部25がその接近を知ることができる。または、指30が操作面3に接触し操作体2が軽く押されると、複数の圧力センサ5のいずれかがこれを検知し、制御部25において、指30が操作面3に触れていることを知ることができる。
【0040】
制御部25では、指が操作面3に接近しまたは接触したと判断すると、振動駆動回路27に指令が出され、振動駆動回路27からコイル19に駆動電流が与えられて、操作体2に振動が与えられる。このとき、制御部25により振動パターンデータベース28から連続振動のパルスパターンが呼び出されて振動駆動回路27に与えられ、操作体2に対し、振幅Fが中心線CLに沿う向きの連続振動が与えられる。すなわち、振動パターンデータベース28に格納されている予め決められた周波数の連続パルスが振動駆動回路27に与えられて、コイル19に連続する交流駆動電流が与えられ、操作体2が連続振動する。ここでの連続振動とは、操作面3に触れている指30に振動が途切れる感覚を与えることなく、または間欠的な衝撃を感じさせることなく、連続する振動を感じさせることができる状態を意味している。
【0041】
基本的な振動パターンとしては、一定の周波数のパルスが途切れることなく振動駆動回路27に与えられる。このときのパルス周波数は、50〜100Hz程度が好ましい。操作体2に一定の周期の連続振動が与えられていると、操作面3に触れた指を各方向へ向けて摺動させるときに、操作面3が指30の移動方向へ追従してあたかも回転しているように、指30に感じさせることができる。すなわち、操作面3が指30に感じる周波数で連続振動していると、操作面3と指30との間の摩擦抵抗力が低下し、指30を操作面3に沿って摺動させたときに、指30と操作面3との接触部に大きな抵抗力が作用しなくなり、その結果、指30と共に操作面3が球体として回転しているかのような感触を得ることができる。
【0042】
特に、図2に示すように、操作面3に凹凸面3aを形成しておくと、操作面3が振動したときに、さらに操作面3と指30との間の摩擦力が低下し、指30の移動に追従して操作面3が回転しているような感覚を得やすくなる。前記凹凸面3aは、操作面3が鏡面状態ではなく、指30と操作面3とを密着しにくくするためのものであり、中心線平均粗さは例えば10〜100μm程度が好ましい。
【0043】
操作体2に与えられる振動は、操作面3のどの位置に指30が触れていようと途切れることがなく、操作面3に触れた指30がどの方向へどの速度でどれだけの距離を移動していようと一定の周波数で連続して与えられる。すなわち、操作面3に対する指30の操作位置や摺動速度とは無関係に、操作体2に対して、振動パターンデータベース28に格納された予め決められた一定の周波数の振動が連続して与えられる。
【0044】
一方、前記特許文献1や特許文献2に記載された入力装置は、画面の項目が切り換わったり、指が一定の距離だけ動く度に、一瞬の衝撃的な力や振動が指に与えられて指にクリック感触を与えるものである。このクリック感触のための振動は、あくまでも不定期に、入力装置に対する操作状態や画面の状態に合わせて与えられるものであり、実施の形態の入力装置1のように、操作面3に触れている指30の移動状態に拘束されることなく、操作体2に予め決められた周波数の振動が連続的に与えられ続けることと、全く相違している。
【0045】
指30が操作面3に触れているときに、操作体2に与えられる連続振動は、前記のように一定の周波数の連続振動であることが基本であるが、さらに操作面3において指30が触れている位置に応じて振動の周波数を可変することも可能である。例えば、図1に示すように、指30が操作面3の頂部3bに触れまたは頂部3bに近い場所(i)に触れているときから、指30が操作面3の裾部に近い位置(ii)へ移動させたときに、その移動に伴って、振動の周波数を変えてもよい。または、図1に示すように、操作面3に触れた指30を、頂部3bに近い軌跡(iii)で周回させているときと、裾部に近い軌跡(iv)で周回させているときとで、振動の周波数を変えることも可能である。
【0046】
ただし、指30が操作面3に触れているときに、振動の周波数を可変させる制御を行う場合に、指30に対して振動が途切れる感触を与えないように、連続振動の中で、周波数を変化させることが必要である。この場合の振動周波数は、前述のように50〜100Hzの範囲の連続振動であることが好ましい。
【0047】
図4に示すように、操作面3は球面の一部であるため、頂部3bを除く広い範囲で、その表面は、連続振動の振幅Fの向きに対して傾く傾斜面(傾斜突面)となっている。この傾斜面に触れた指30を移動させると、操作面3が指30に追従して回転しているかのように感じる度合いがさらに大きくなる。
【0048】
図4に示すように、指30が操作面3の頂部3b以外の場所で接触している接触面積の中心を接触部Tとする。接触部Tにおいて操作面3に与えられている連続振動の振幅Fの向きは、上下方向すなわち中心線CLと平行な方向である。図4には、接触部Tを通過する法線Rと、接触部Tを通過する接線Sが示されているが、接触部Tにおいては操作面3の傾斜方向が接線Sの方向である。よって、接触部Tには、連続振動の振幅Fの分力である振幅成分Fsが接線Sの向きに沿って与え続けられている。
【0049】
接触部Tにおいて操作面3から指30に与えられる振幅F方向である上下方向の力は+fと−fであり、その絶対値「f」は同じである。指30に与えられている力が+fのとき、接触部Tでは指30に対して力+fの接線S方向の分力+sが作用し、指30に与えられている力が−fのとき、接触部Tでは指30に対して接線S方向の分力−sが作用する。
【0050】
指30を頂部3bからフランジ部4に向けて摺動させるときは、指30から操作面3に下向きの力Wが与えられ、指30から操作面3に対して、接線Sの方向に向く分力Wsが与えられる。前記分力−sが指30の摺動力の分力Wsと同じ向きに作用しているため、接触部Tに触れた指30をフランジ部4に向けて摺動させているときに、操作面3が指30の摺動に追従してあたかも摺動方向へ回転しているような感触を得やすくなる。
【0051】
逆に、操作面3に触れている指30を、フランジ部4に近い裾部側から頂部3bに向けて摺動させているときも、その摺動力の接線Sに沿う分力と、連続振動の振幅Fによって接線Sに沿う向きに生じる前記分力+sとが同じ向きであるため、やはり、指30の移動に追従して操作面3が回転しているかのような感触を得やすくなる。
【0052】
さらに、操作体2は弾性部材6によって支持されており、図4に示すように、操作体2が小さな角度αだけ傾くことができる。操作面3に触れた指30を頂部3bから裾部に向けて摺動させ、または裾部から頂部3bに向けて摺動させるときに、操作面3に作用する力によって、操作面3が摺動方向へ角度αに相当する限られた短い距離だけ移動する。この操作面3の移動と、接線Sに沿う振幅成分Fsの双方の作用によって、さらに、操作面3が回転しているかのような感触を指30に与えやすくなる。
【0053】
このときの角度αは、操作体2の傾き方向の動きを指30がわずかに感じる程度であり、前述のように、前記角度αは、5度以下が好ましく、3度以下がさらに好ましい。
【0054】
図1に示すように、操作面3に触れた指30を頂部3bから裾部に向けて摺動させ、または裾部から頂部3bに向けて摺動させ、あるいは軌跡(iii)または軌跡(iv)に沿って摺動させると、図3のパターンで配列した内周側静電センサ9aと外周側静電センサ9bのそれぞれのセンサからの検知出力が変化し、この検知出力の変化によって、トラックボール装置においてボールを回転させているのと同じような入力を行うことができる。
【0055】
また、指30が操作面3を摺動するときに、操作体2に作用する力の向きとその大きさが圧力センサ5で検知される。この検知出力によっても、指30の摺動方向とそのときに操作面3に与えられている力を検知することができる。
【0056】
さらに、操作面3の頂部3bに触れた指30によって、操作体2の全体を下向きに押圧するスイッチ動作を行うことが可能である。この場合には、4個の圧力センサ5の全てが所定の圧力を検知したときに、制御部25においてスイッチ操作が行われたと判断する。このとき、制御部25は、振動パターンデータベース28からスイッチ操作のクリック感触を設定するパターンの振動パルスを呼び出して振動駆動回路27に与え、振動駆動回路27からコイル19に駆動電流が与えられる。このとき、連続するパルスが短時間だけ振動駆動回路27に与えられ、操作体2に対して一瞬の衝撃的な振動が与えられる。これにより、指30がスイッチ操作の反力を受けたような衝撃を感じることができる。
【0057】
このスイッチ反力を生じさせる振動は、操作体2によってスイッチ操作が行われたときに不定期に発生するものであり、操作面3があたかも回転するように感じさせる連続振動とは異なるものである。操作体2に対しては、回転を感じさせる連続振動に、スイッチ反力のための不定期な振動が重畳されて与えられる。
【0058】
さらに、振動パターンデータベース28に格納されている振動パターンによって、特許文献1に記載されているように、電子機器の画面に表示されたメニューなどの項目が切換えられたときに、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよいし、画面のスクロールバーがその終点位置に移動したときに、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよい。または、特許文献2に記載されているように、操作面3に触れた指が操作面3に沿って一定の距離だけ移動する度に、すなわち操作面3があたかも一定の距離だけ回転したと感じられる度に、加振装置15から操作体2に衝撃的な振動が一瞬だけ与えられてもよい。これらのケースでは、それぞれの衝撃的な振動は、操作面3があたかも回転するように感じさせる連続振動に重畳されて操作体2に与えられる。
【0059】
図6に示す第2の実施の形態の入力装置101は、操作体102の表面にシート状の静電センサ103が取り付けられ、その表面が球面形状に突出する操作面103aとなっている。操作面103aは、カバー部材108の穴108aから上方へ突出している。静電センサ103は、複数のX電極と複数のY電極が、誘電体を挟んで互いに直交して配置されて、さらに表面が絶縁層で覆われている。それぞれの電極に選択的にパルス状の駆動電圧が与えられ、操作面103aに接地電位に近い電位の指が触れると、指に近い電極から指に瞬間的に電流が逃げる。どの電極に駆動電圧を与えたときに電流が変化したかを検知することで、操作面103aのどの位置に指が接触しているのかを認識することができる。
【0060】
カバー部材108の裏面には、図3に示したのと同じ静電センサ9が設けられている。操作面103aを構成する静電センサ103と、カバー部材108に設けられた静電センサ9とで、操作面103aのどの位置に指が触れているか、ならびに操作面103aに沿ってどの向きに指が摺動しているかを検知することができる。
【0061】
操作体102のフランジ部104は、合成ゴムや発泡樹脂材料の弾性部材106を介して、可動基台109に設置されている。可動基台109の右端部は、固定基台107に軸109aを介して回動自在に支持されている。可動基台109の左端部と固定基台107との間に押圧スイッチ110が設けられている。押圧スイッチ110は機械式であり、上部にアクチュエータ110aが進退自在に取り付けられ、内蔵されたばね部材でアクチュエータ110aが突出方向へ付勢されている。また、押圧スイッチ110の内部に、アクチュエータ110aが押されたときに接触する接点が設けられている。
【0062】
また、固定基台107と操作体102との間に、図2に示したのと同じ構造の加振装置15が設けられている。
【0063】
この入力装置101は、静電センサ103および静電センサ9で指が接近したことが検知されると、加振装置15が始動し、操作体102に連続する振動が与えられる。そのため、指を操作面103aに沿って摺動させたときに、操作面103aが指の移動に追従して回転しているかのように感じることができる。また、静電センサ103および静電センサ9で指の移動位置を知ることができ、指の移動に応じて、電子機器の画面でカーソルを移動させたり、画面を変化させることができる。
【0064】
また、操作体102が押されると、押圧スイッチ110が動作し、スイッチ入力が行われるとともに、押圧スイッチ110に内蔵されたばねにより、操作面103aを押す指に、機械的なスイッチ反力の感触(クリック感触)を与えることができる。
【0065】
なお、図6に示す入力装置101に、図2に示す圧力センサ5を装備させて、操作面103aが軽い力で押されたときは、圧力センサ5でこれを検知し、加振装置15から操作体102に与えられる瞬間的な振動で指にスイッチ反力を感じさせ、操作面103aがさらに強い力で押されると、押圧スイッチ110が動作して、指で機械的なスイッチ反力を感じることができるようにしてもよい。
【0066】
図1ないし図4に示した第1の実施の形態の入力装置1と図6に示した第2の実施の形態の入力装置101は、突形状の操作面3,103aが球面の一部を構成しているが、突形状の操作面は、球面に限られるものではなく、突曲面形状であればよい。さらに操作面が円筒面の一部で、例えば円筒面の180度の角度部分で構成してもよい。この場合、操作体に連続振動を与えて、指を操作面に沿って移動させると、指において、操作面がローラの一部のように回転しているかのような感覚を得ることが可能である。
【0067】
図7に示す第3の実施の形態の入力装置201は、操作体202の表面の操作面203が凹曲面であり、凹球面の一部、すなわちほぼ半球の凹面となっている。操作面203にシート状の静電センサが凹曲面に沿って取り付けられている。この静電センサの検知方式は、図6に示した静電センサ103と同種のものである。操作体202のフランジ部204は、弾性部材206を介して基台207に支持されている。
【0068】
操作体202と基台207との間に加振装置15が設けられており、指30が操作面203に接触しているときに、操作体202に対して振幅Fが垂直方向に向けられた連続振動が与えられる。よって、凹曲面の操作面203に指30を触れて摺動させると、指30の移動に追従して半球の凹曲面が回転しているかのような感触を得ることができる。
【0069】
図8に示す第4の実施の形態の入力装置301は、操作体302が細長形状であり、その表面の操作面303がほぼ平面形状である。操作体302の背面に、静電センサ304が取り付けられている。この静電センサ304は、図6に示す静電センサ103と同種のものであり、操作面303に指30が接触している位置およびその移動方向を検知することができる。
【0070】
操作体302は、基台307に弾性部材306を介して支持されている。操作体302と基台307との間に加振装置315が設けられている。この加振装置315によって、操作体302に連続信号が与えられる。この連続振動の振幅方向は、操作面303に垂直なFy方向および操作面303に平行なFx方向である。Fy方向の振幅の振動とFx方向の振幅の振動は連続的に与えられ、その合成振動の振幅方向は、操作面303に対して斜めに与えられる。すなわち、操作面303は、加振装置315から与えられる振動の振幅方向に対して傾斜した傾斜面となっている。
【0071】
したがって、操作面303に触れた指30を、操作面303に沿ってWx方向へ移動させるときに、操作面303がWx方向に沿う振幅成分を有しているため、あたかも操作面303が指30に追従してWx方向へ動いているかのような感触を得ることが可能である。
【符号の説明】
【0072】
1 入力装置
2 操作体
3 操作面
3b 頂部
4 フランジ部
5 圧力センサ
6 弾性部材
8 カバー部材
9 静電センサ
15 加振装置
30 指
101 入力装置
102 操作体
103 静電センサ
103a 操作面
110 押圧スイッチ
201 入力装置
202 操作体
203 操作面
301 入力装置
302 操作体
303 操作面
304 静電センサ
315 加振装置
F 振幅
Fs 振幅成分
T 接触部
【特許請求の範囲】
【請求項1】
指が触れる操作面を有する操作体と、前記操作面に対する指による操作状態を検知する検出部材とを有する入力装置において、
前記操作体は、前記操作面に触れた指が前記操作面に沿って移動したときに動かないように固定され、または指が前記操作面に沿って移動する移動距離よりも短い距離だけしか動かないようにその動きが規制されており、
少なくとも指が前記操作面に触れている間に、前記操作体に対して予め決められた周波数の連続振動を与え続ける振動付与機構が設けられていることを特徴とする入力装置。
【請求項2】
前記操作面は、指が対向する方向へ向けて突出する突形状である請求項1記載の入力装置。
【請求項3】
前記操作面は球面の一部である請求項2記載の入力装置。
【請求項4】
前記操作面は、指が対向する方向と逆向きに向けて窪む凹形状である請求項1記載の入力装置。
【請求項5】
前記操作面は、ほぼ平面形状である請求項1記載の入力装置。
【請求項6】
前記操作面が、指の移動距離よりも短い距離だけ動けるように、前記操作体が弾性体で支持されている請求項1ないし5のいずれかに記載の入力装置。
【請求項7】
前記振動付与機構を制御して、前記振動付与機構で前記連続振動を発生させるとともに、指による所定の操作が行われたときに、前記振動付与機構から前記操作体に対して不定期な振動を与える制御部が設けられている請求項1ないし6のいずれかに記載の入力装置。
【請求項8】
前記振動付与機構から前記操作体に対して、前記操作面での指の移動方向に沿う振幅成分を含んだ連続振動が与えられる請求項1ないし7のいずれかに記載の入力装置。
【請求項9】
前記操作面は、前記振動付与機構から前記操作体に与えられる連続振動の振幅方向に対して傾斜する傾斜面を少なくとも一部に有している請求項8記載の入力装置。
【請求項10】
前記検出部材は、前記操作面が指で押されたのを検知する圧力センサである請求項1ないし9のいずれかに記載の入力装置。
【請求項11】
前記検出部材は、指の接近と移動を検出する静電センサである請求項1ないし9のいずれかに記載の入力装置。
【請求項1】
指が触れる操作面を有する操作体と、前記操作面に対する指による操作状態を検知する検出部材とを有する入力装置において、
前記操作体は、前記操作面に触れた指が前記操作面に沿って移動したときに動かないように固定され、または指が前記操作面に沿って移動する移動距離よりも短い距離だけしか動かないようにその動きが規制されており、
少なくとも指が前記操作面に触れている間に、前記操作体に対して予め決められた周波数の連続振動を与え続ける振動付与機構が設けられていることを特徴とする入力装置。
【請求項2】
前記操作面は、指が対向する方向へ向けて突出する突形状である請求項1記載の入力装置。
【請求項3】
前記操作面は球面の一部である請求項2記載の入力装置。
【請求項4】
前記操作面は、指が対向する方向と逆向きに向けて窪む凹形状である請求項1記載の入力装置。
【請求項5】
前記操作面は、ほぼ平面形状である請求項1記載の入力装置。
【請求項6】
前記操作面が、指の移動距離よりも短い距離だけ動けるように、前記操作体が弾性体で支持されている請求項1ないし5のいずれかに記載の入力装置。
【請求項7】
前記振動付与機構を制御して、前記振動付与機構で前記連続振動を発生させるとともに、指による所定の操作が行われたときに、前記振動付与機構から前記操作体に対して不定期な振動を与える制御部が設けられている請求項1ないし6のいずれかに記載の入力装置。
【請求項8】
前記振動付与機構から前記操作体に対して、前記操作面での指の移動方向に沿う振幅成分を含んだ連続振動が与えられる請求項1ないし7のいずれかに記載の入力装置。
【請求項9】
前記操作面は、前記振動付与機構から前記操作体に与えられる連続振動の振幅方向に対して傾斜する傾斜面を少なくとも一部に有している請求項8記載の入力装置。
【請求項10】
前記検出部材は、前記操作面が指で押されたのを検知する圧力センサである請求項1ないし9のいずれかに記載の入力装置。
【請求項11】
前記検出部材は、指の接近と移動を検出する静電センサである請求項1ないし9のいずれかに記載の入力装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−89117(P2013−89117A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230828(P2011−230828)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]