
入港用操船支援システム
【課題】特定の港へ定期的に入港する船舶のための操船に際し、上記船舶の過去における入港時の操船記録を含む航海記録データベースから、現在の気象海象状態での入港用操船の類似記録を検索し、その類似記録を利用して、上記港の桟橋までの予定航路を演算しモニターに示すことにより、上記特定の港における着桟までの操船を能率よく安全に行えるようにした入港用操船支援システムを提供する。
【解決手段】特定の港への船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3と気象海象予報受信手段4とを用いて類似記録検索手段5により現在の状況に類似した操船記録を求め、第1設定手段6により入港のための直近の通過点などが設定されるとともに、第2設定手段7で減速の度合が設定され、ついで予定航路演算手段8で求められた着桟のための予定航路がモニターMに表示される。
【解決手段】特定の港への船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3と気象海象予報受信手段4とを用いて類似記録検索手段5により現在の状況に類似した操船記録を求め、第1設定手段6により入港のための直近の通過点などが設定されるとともに、第2設定手段7で減速の度合が設定され、ついで予定航路演算手段8で求められた着桟のための予定航路がモニターMに表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特定の港に対し定期的に行われる船舶の入港に際して、桟橋へ到達するまでの航路における直近の通過点から着桟までの操船を、安全に且つ能率よく行えるようにした入港用操船支援システムに関する。
【背景技術】
【0002】
従来の航海計画では、目的港に到る航路について、最短迂回航法など種々の航法による航路の設定が行われている。そして、気象・海象の影響を考慮しながら最短時間で目的港への到着が行われるように、航路を形成する通過点を逐次設定することが行われている。 しなしながら、上述のような従来の運航システムでは、目的港の近くに船舶が到達してから港内の桟橋へ船体が横付けされるまでの詳細な操船計画まで立てることは難しく、船長の熟練した技量が必要とされている。
【特許文献1】特開平5−298600号公報
【特許文献2】特開2005−162117号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、特定の港へ定期的に入港する船舶のための操船に際して、上記港への上記船舶の過去における入港時の操船記録を含んだ航海記録データベースから、現在の気象海象状態での入港用操船の類似記録を検索して、その類似記録を利用することにより、上記港の桟橋へ着桟するまでの予定航路を演算し、これをモニターに示すことによって、上記特定の港における着桟までの操船を能率よく安全に行えるようにした入港用操船支援システムを提供することを課題とする。
【課題を解決するための手段】
【0004】
本発明の入港用操船支援システムは、特定の港へ入港する船舶のための操船支援システムにおいて、上記港への上記船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースと、同航海記録データベースから現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段と、同類似記録検索手段により検索された類似記録に基づき上記港の桟橋へ向け旋回を開始すべく直近の通過点と同通過点での船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段と、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合を設定する第2設定手段と、上記の第1および第2設定手段により実現されるべき予定航路を演算する予定航路演算手段とを備えるとともに、上記予定航路を上記桟橋と共にモニターに示す港内図表示手段を備えたことを特徴としている。
【0005】
また、本発明の入港用操船支援システムは、上記船舶を上記港へ入港させるべく上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路とともに経時的に上記航海記録データベースに記録する実記録手段が設けられたことを特徴としている。
【0006】
さらに、本発明の入港用操船支援システムは、上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられたことを特徴としている。
【0007】
また、本発明の入港用操船支援システムは、上記航海記録データベースにおける上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段と、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段とを備えたことを特徴としている。
【0008】
さらに、本発明の入港用操船支援システムは、上記港へ入港するための操船を行う前に、予め所要の気象海象状態での上記類似記録に基づき、直近の模擬通過点の選定と、同模擬通過点における上記船舶の模擬方位角の選定ならびに同船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段と、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段とが設けられたことを特徴としている。
【発明の効果】
【0009】
本発明の入港用操船支援システムでは、特定の港への入港時に、同港への入港に際し種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースから、現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録が検索されて、その類似記録に基づき、第1設定手段により、上記港の桟橋へ向け旋回を開始するための直近の通過点と、同通過点での船体の方位角ならびに旋回のための舵角および船速とが設定される。そして、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合が第2設定手段において設定され、このようにして第1,第2設定手段により実現されるべき予定航路が予定航路演算手段により演算されて、上記桟橋と共に港内図表示手段のモニターに表示されるようになる。
したがって、入港のための準備作業が著しく簡易化されるとともに、着桟のための操船の精度が大幅に高められるようになり、入港時の操船における安全性の向上にも寄与することができる。
【0010】
また、上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路と共に経時的に上記航海記録データベースに記録する実記録手段が設けられることにより、上記航海記録データベースの記録内容が豊富になって、次回以降の入港に際しての操船支援業務に役立つようになる。
【0011】
そして、上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられると、操船に従事する人々にとって、前記特定の港への入港のための操船経験が深められ、次回以降の操船に役立つようになる。
【0012】
また、上記航海記録データベースには、操船記録と共に、上記特定の港の周囲の地形や建造物などについての風景としてのデータが集録されていて、上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段が設けられるとともに、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段が設けられていると、着桟のための操船に際して実際に見える風景との比較により、操船の精度を確認するための参考になるという利点が得られる。
【0013】
さらに、上記港へ入港するための操船を行う前に、所要の気象海象状態での上記類似記録に基づく模擬通過点の選定と、同模擬通過点における上記船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段を備えるとともに、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段を備えていると、予め模擬的な入港用操船を気象海象の変化に応じ繰り返し行うことができるので、実際に入港のための操船を行う時点での自信を深めることが可能になる。
【発明を実施するための最良の形態】
【0014】
モニターは、船橋のみならず機関室にも設置され、直近の通過点の通過後に減速のための主機関制御を行うことが予測されるように配慮される。
【実施例】
【0015】
図1は本発明の一実施例としての入港用操船支援システムを示すブロック図、図2は上記システムにおけるモニター表示の一例を示す説明図であり、図3は上記システムを利用して入港のための操船に係る模擬的操作を行うための付加的システムを示すブロック図である。
【0016】
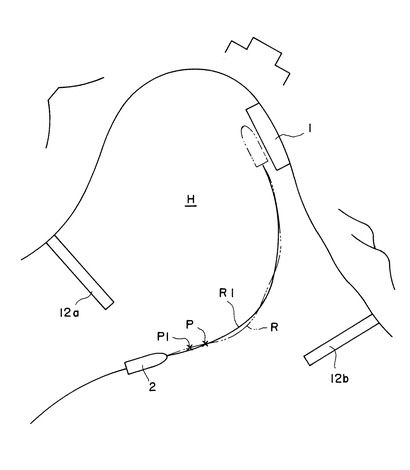
図2に示すような特定の港Hへ入港し桟橋1へ横付けされる船舶2のための操船支援システムとして、船舶2の船橋には図1に示す入港用操船支援システムAが装備される。
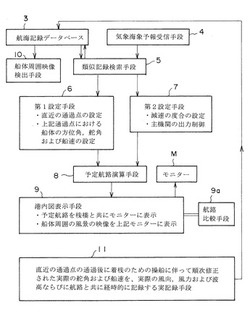
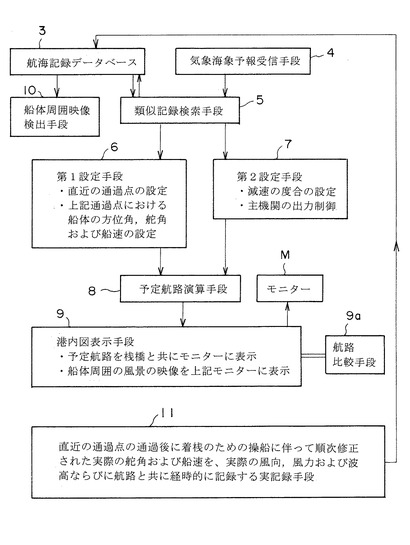
図1,2に示すように、この操船支援システムAには、港Hへの船舶2の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3が設けられるほか、同航海記録データベース3から、気象海象予報受信手段4で得られた現在の風向,風力および波高に類似する気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段5が設けられている。
【0017】
そして、類似記録検索手段5により検索された類似記録に基づき、図2の桟橋1へ向け船舶2が旋回を開始できるように、直近の通過点Pと、同通過点Pでの船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段6が設けられるほか、通過点Pを経由してから桟橋1へ着桟するまでの減速の度合を設定して主機関の出力制御を行う第2設定手段7が設けられている。
【0018】
また、第1設定手段6および第2設定手段7により実現されるべき図2の予定航路R1を求めるため演算する予定航路演算手段8と、予定航R1を桟橋1と共にモニターMに表示する港内図表示手段9とが設けられている。
そして、港内図表示手段9には、航海記録データベース3に集録されている船体周囲の風景の映像を、船体周囲映像検出手段10を介してモニターMに表示する機能も装備されている。
【0019】
また、直近の通過点Pの通過後に、桟橋1へ着桟するための操船に伴って順次修正された実際の舵角および船速を、実際の風向,風力および波高ならびに実際の航路R(図2参照)と共に経時的に航海記録データベース3へ記録する実記録手段11が設けられている。 なお、図2において、符号12a,12bは、いずれも防波堤を示している。
【0020】
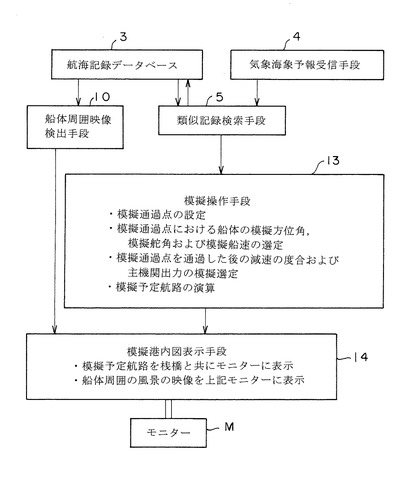
さらに、本実施例では、図3に示すように、前記の港Hへ入港する前に入港のための模擬操船が行われるようになっており、予め気象海象予報受信手段4から得られた所要の気象海象状態での操船のための類似記録が、航海記録データベース3から類似記録検索手段5を介して求められる。
【0021】
そして、上記類似記録に基づき、模擬操作手段13において、模擬通過点の選定、模擬通過点における船体の模擬方位角,模擬舵角および模擬船速の選定,模擬通過点を通過した後の減速の度合および主機関出力の模擬的選定が行われるとともに、模擬予定航路の演算が行われるようになっている。
【0022】
また、模擬港内図表示手段14により、上記模擬予定航路が桟橋と共にモニターMに表示されるとともに、航海記録データベース3から船体周囲映像検出手段10を介して得られた船体周囲の風景の映像もモニターMに表示されるようになっている。
【0023】
上述の本実施例の入港用操船支援システムAでは、特定の港Hへの入港時に、同港Hへの入港に際し種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3から、気象海象予報受信手段4で求めた現在の風向,風力および波高に類似する気象海象状態での入港用操船の類似記録が類似記録検索手段5により検索されて、その類似記録に基づき、第1設定手段6により、港Hの桟橋1へ向け旋回を開始するための直近の通過点Pと、同通過点Pでの船体の方位角ならびに旋回のための舵角および船速とが設定される。そして、通過点Pを経由してから桟橋1へ着桟するまでの減速の度合が第2設定手段7において設定され、このようにして第1,第2設定手段6,7により実現されるべき予定航路R1が予定航路演算手段8により演算されて、桟橋1と共に港内図表手段のモニターMに表示されるようになる。
したがって、入港のための準備作業が著しく簡易化されるとともに、着桟のための操船の精度が大幅に高められるようになり、入港時の操船における安全性の向上にも寄与することができる。
【0024】
また、第1設定手段6により設定された通過点Pでの船体方位角および舵角ならびに船速が、実際に桟橋1へ着桟するための操船に伴い通過点Pの通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路Rと共に経時的に航海記録データベース3に記録する実記録手段11が設けられることにより、航海記録データベース3の記録内容が豊富になって、次回以降の入港に際しての操船支援に役立つようになる。
【0025】
そして、港内図表示手段9において、予定航路R1に実際の航路Rを重ね合わせて比較しうる航路比較手段9aが設けられると、操船に従事する人々にとって、特定の港Hへの入港のための操船経験が深められ、次回以降の操船に役立つようになる。
【0026】
また、航海記録データベース3には、操船記録と共に、特定の港Hを取り囲む地形や建造物などを船体周囲の風景として表現するデータが集録されていて、航海記録データベース3から予定航路R1に沿う航行時の船体を取り囲む風景の映像を検出する船体周囲映像検出手段10が設けられるとともに、同映像検出手段10の検出結果に基づいて所要の風景をモニターMに表示する風景表示手段が設けられているので、着桟のための操船に際して実際に見える風景との比較により、操船の精度を確認するための参考になるという利点が得られる。
【0027】
なお、船舶の着桟後においても、係船索による係船作業が完了するまでは、海流の影響に対処して主機関の出力制御を行う場合がある。
【0028】
さらに、港Hへ入港するための操船を行う前に、所要の気象海象状態での上記類似記録に基づく模擬通過点P1の選定と、同模擬通過点P1における船舶2の旋回開始のための模擬舵角および模擬船速の選定と、模擬通過点P1を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段13を備えるとともに、同模擬操作手段13により船舶2が着桟するまでの模擬航路R1を桟橋1と共にモニターMに表示しうる模擬港内図表示手段14を備えていると、予め模擬的な入港用操船を気象海象の変化に応じ繰り返し行うことができるようになり、これにより実際に入港のための操船を行う時点での操船者の自信を深めることが可能になる。
なお、モニターMは、船橋のみならず機関室にも設置され、直近の通過点の通過後に減速のための主機関制御を行うことが予測されるように配慮される。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例としての入港用操船支援システムを示すブロック図である。
【図2】上記システムにおけるモニター表示の一例を示す説明図である。
【図3】上記入港用操船支援システムに併設される模擬入港用支援システムの一例を示すブロック図である。
【符号の説明】
【0030】
1 桟橋
2 船舶
3 航海記録データベース
4 気象海象予報受信手段
5 類似記録検索手段
6 第1設定手段
7 第2設定手段
8 予定航路演算手段
9 港内図表示手段
9a 航路比較手段
10 船体周囲映像検出手段
11 実記録手段
12a,12b 防波堤
13 模擬操作手段
14 模擬港内図表示手段
A 操船支援システム
H 港
M モニター
P 通過点
P1 模擬通過点
R 実際の航路
R1 予定航路
【技術分野】
【0001】
本発明は、特定の港に対し定期的に行われる船舶の入港に際して、桟橋へ到達するまでの航路における直近の通過点から着桟までの操船を、安全に且つ能率よく行えるようにした入港用操船支援システムに関する。
【背景技術】
【0002】
従来の航海計画では、目的港に到る航路について、最短迂回航法など種々の航法による航路の設定が行われている。そして、気象・海象の影響を考慮しながら最短時間で目的港への到着が行われるように、航路を形成する通過点を逐次設定することが行われている。 しなしながら、上述のような従来の運航システムでは、目的港の近くに船舶が到達してから港内の桟橋へ船体が横付けされるまでの詳細な操船計画まで立てることは難しく、船長の熟練した技量が必要とされている。
【特許文献1】特開平5−298600号公報
【特許文献2】特開2005−162117号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、特定の港へ定期的に入港する船舶のための操船に際して、上記港への上記船舶の過去における入港時の操船記録を含んだ航海記録データベースから、現在の気象海象状態での入港用操船の類似記録を検索して、その類似記録を利用することにより、上記港の桟橋へ着桟するまでの予定航路を演算し、これをモニターに示すことによって、上記特定の港における着桟までの操船を能率よく安全に行えるようにした入港用操船支援システムを提供することを課題とする。
【課題を解決するための手段】
【0004】
本発明の入港用操船支援システムは、特定の港へ入港する船舶のための操船支援システムにおいて、上記港への上記船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースと、同航海記録データベースから現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段と、同類似記録検索手段により検索された類似記録に基づき上記港の桟橋へ向け旋回を開始すべく直近の通過点と同通過点での船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段と、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合を設定する第2設定手段と、上記の第1および第2設定手段により実現されるべき予定航路を演算する予定航路演算手段とを備えるとともに、上記予定航路を上記桟橋と共にモニターに示す港内図表示手段を備えたことを特徴としている。
【0005】
また、本発明の入港用操船支援システムは、上記船舶を上記港へ入港させるべく上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路とともに経時的に上記航海記録データベースに記録する実記録手段が設けられたことを特徴としている。
【0006】
さらに、本発明の入港用操船支援システムは、上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられたことを特徴としている。
【0007】
また、本発明の入港用操船支援システムは、上記航海記録データベースにおける上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段と、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段とを備えたことを特徴としている。
【0008】
さらに、本発明の入港用操船支援システムは、上記港へ入港するための操船を行う前に、予め所要の気象海象状態での上記類似記録に基づき、直近の模擬通過点の選定と、同模擬通過点における上記船舶の模擬方位角の選定ならびに同船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段と、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段とが設けられたことを特徴としている。
【発明の効果】
【0009】
本発明の入港用操船支援システムでは、特定の港への入港時に、同港への入港に際し種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースから、現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録が検索されて、その類似記録に基づき、第1設定手段により、上記港の桟橋へ向け旋回を開始するための直近の通過点と、同通過点での船体の方位角ならびに旋回のための舵角および船速とが設定される。そして、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合が第2設定手段において設定され、このようにして第1,第2設定手段により実現されるべき予定航路が予定航路演算手段により演算されて、上記桟橋と共に港内図表示手段のモニターに表示されるようになる。
したがって、入港のための準備作業が著しく簡易化されるとともに、着桟のための操船の精度が大幅に高められるようになり、入港時の操船における安全性の向上にも寄与することができる。
【0010】
また、上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路と共に経時的に上記航海記録データベースに記録する実記録手段が設けられることにより、上記航海記録データベースの記録内容が豊富になって、次回以降の入港に際しての操船支援業務に役立つようになる。
【0011】
そして、上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられると、操船に従事する人々にとって、前記特定の港への入港のための操船経験が深められ、次回以降の操船に役立つようになる。
【0012】
また、上記航海記録データベースには、操船記録と共に、上記特定の港の周囲の地形や建造物などについての風景としてのデータが集録されていて、上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段が設けられるとともに、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段が設けられていると、着桟のための操船に際して実際に見える風景との比較により、操船の精度を確認するための参考になるという利点が得られる。
【0013】
さらに、上記港へ入港するための操船を行う前に、所要の気象海象状態での上記類似記録に基づく模擬通過点の選定と、同模擬通過点における上記船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段を備えるとともに、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段を備えていると、予め模擬的な入港用操船を気象海象の変化に応じ繰り返し行うことができるので、実際に入港のための操船を行う時点での自信を深めることが可能になる。
【発明を実施するための最良の形態】
【0014】
モニターは、船橋のみならず機関室にも設置され、直近の通過点の通過後に減速のための主機関制御を行うことが予測されるように配慮される。
【実施例】
【0015】
図1は本発明の一実施例としての入港用操船支援システムを示すブロック図、図2は上記システムにおけるモニター表示の一例を示す説明図であり、図3は上記システムを利用して入港のための操船に係る模擬的操作を行うための付加的システムを示すブロック図である。
【0016】
図2に示すような特定の港Hへ入港し桟橋1へ横付けされる船舶2のための操船支援システムとして、船舶2の船橋には図1に示す入港用操船支援システムAが装備される。
図1,2に示すように、この操船支援システムAには、港Hへの船舶2の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3が設けられるほか、同航海記録データベース3から、気象海象予報受信手段4で得られた現在の風向,風力および波高に類似する気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段5が設けられている。
【0017】
そして、類似記録検索手段5により検索された類似記録に基づき、図2の桟橋1へ向け船舶2が旋回を開始できるように、直近の通過点Pと、同通過点Pでの船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段6が設けられるほか、通過点Pを経由してから桟橋1へ着桟するまでの減速の度合を設定して主機関の出力制御を行う第2設定手段7が設けられている。
【0018】
また、第1設定手段6および第2設定手段7により実現されるべき図2の予定航路R1を求めるため演算する予定航路演算手段8と、予定航R1を桟橋1と共にモニターMに表示する港内図表示手段9とが設けられている。
そして、港内図表示手段9には、航海記録データベース3に集録されている船体周囲の風景の映像を、船体周囲映像検出手段10を介してモニターMに表示する機能も装備されている。
【0019】
また、直近の通過点Pの通過後に、桟橋1へ着桟するための操船に伴って順次修正された実際の舵角および船速を、実際の風向,風力および波高ならびに実際の航路R(図2参照)と共に経時的に航海記録データベース3へ記録する実記録手段11が設けられている。 なお、図2において、符号12a,12bは、いずれも防波堤を示している。
【0020】
さらに、本実施例では、図3に示すように、前記の港Hへ入港する前に入港のための模擬操船が行われるようになっており、予め気象海象予報受信手段4から得られた所要の気象海象状態での操船のための類似記録が、航海記録データベース3から類似記録検索手段5を介して求められる。
【0021】
そして、上記類似記録に基づき、模擬操作手段13において、模擬通過点の選定、模擬通過点における船体の模擬方位角,模擬舵角および模擬船速の選定,模擬通過点を通過した後の減速の度合および主機関出力の模擬的選定が行われるとともに、模擬予定航路の演算が行われるようになっている。
【0022】
また、模擬港内図表示手段14により、上記模擬予定航路が桟橋と共にモニターMに表示されるとともに、航海記録データベース3から船体周囲映像検出手段10を介して得られた船体周囲の風景の映像もモニターMに表示されるようになっている。
【0023】
上述の本実施例の入港用操船支援システムAでは、特定の港Hへの入港時に、同港Hへの入港に際し種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベース3から、気象海象予報受信手段4で求めた現在の風向,風力および波高に類似する気象海象状態での入港用操船の類似記録が類似記録検索手段5により検索されて、その類似記録に基づき、第1設定手段6により、港Hの桟橋1へ向け旋回を開始するための直近の通過点Pと、同通過点Pでの船体の方位角ならびに旋回のための舵角および船速とが設定される。そして、通過点Pを経由してから桟橋1へ着桟するまでの減速の度合が第2設定手段7において設定され、このようにして第1,第2設定手段6,7により実現されるべき予定航路R1が予定航路演算手段8により演算されて、桟橋1と共に港内図表手段のモニターMに表示されるようになる。
したがって、入港のための準備作業が著しく簡易化されるとともに、着桟のための操船の精度が大幅に高められるようになり、入港時の操船における安全性の向上にも寄与することができる。
【0024】
また、第1設定手段6により設定された通過点Pでの船体方位角および舵角ならびに船速が、実際に桟橋1へ着桟するための操船に伴い通過点Pの通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路Rと共に経時的に航海記録データベース3に記録する実記録手段11が設けられることにより、航海記録データベース3の記録内容が豊富になって、次回以降の入港に際しての操船支援に役立つようになる。
【0025】
そして、港内図表示手段9において、予定航路R1に実際の航路Rを重ね合わせて比較しうる航路比較手段9aが設けられると、操船に従事する人々にとって、特定の港Hへの入港のための操船経験が深められ、次回以降の操船に役立つようになる。
【0026】
また、航海記録データベース3には、操船記録と共に、特定の港Hを取り囲む地形や建造物などを船体周囲の風景として表現するデータが集録されていて、航海記録データベース3から予定航路R1に沿う航行時の船体を取り囲む風景の映像を検出する船体周囲映像検出手段10が設けられるとともに、同映像検出手段10の検出結果に基づいて所要の風景をモニターMに表示する風景表示手段が設けられているので、着桟のための操船に際して実際に見える風景との比較により、操船の精度を確認するための参考になるという利点が得られる。
【0027】
なお、船舶の着桟後においても、係船索による係船作業が完了するまでは、海流の影響に対処して主機関の出力制御を行う場合がある。
【0028】
さらに、港Hへ入港するための操船を行う前に、所要の気象海象状態での上記類似記録に基づく模擬通過点P1の選定と、同模擬通過点P1における船舶2の旋回開始のための模擬舵角および模擬船速の選定と、模擬通過点P1を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段13を備えるとともに、同模擬操作手段13により船舶2が着桟するまでの模擬航路R1を桟橋1と共にモニターMに表示しうる模擬港内図表示手段14を備えていると、予め模擬的な入港用操船を気象海象の変化に応じ繰り返し行うことができるようになり、これにより実際に入港のための操船を行う時点での操船者の自信を深めることが可能になる。
なお、モニターMは、船橋のみならず機関室にも設置され、直近の通過点の通過後に減速のための主機関制御を行うことが予測されるように配慮される。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例としての入港用操船支援システムを示すブロック図である。
【図2】上記システムにおけるモニター表示の一例を示す説明図である。
【図3】上記入港用操船支援システムに併設される模擬入港用支援システムの一例を示すブロック図である。
【符号の説明】
【0030】
1 桟橋
2 船舶
3 航海記録データベース
4 気象海象予報受信手段
5 類似記録検索手段
6 第1設定手段
7 第2設定手段
8 予定航路演算手段
9 港内図表示手段
9a 航路比較手段
10 船体周囲映像検出手段
11 実記録手段
12a,12b 防波堤
13 模擬操作手段
14 模擬港内図表示手段
A 操船支援システム
H 港
M モニター
P 通過点
P1 模擬通過点
R 実際の航路
R1 予定航路
【特許請求の範囲】
【請求項1】
特定の港へ入港する船舶のための操船支援システムにおいて、上記港への上記船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースと、同航海記録データベースから現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段と、同類似記録検索手段により検索された類似記録に基づき上記港の桟橋へ向け旋回を開始すべく直近の通過点と同通過点での船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段と、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合を設定する第2設定手段と、上記の第1および第2設定手段により実現されるべき予定航路を演算する予定航路演算手段とを備えるとともに、上記予定航路を上記桟橋と共にモニターに示す港内図表示手段を備えたことを特徴とする、入港用操船支援システム。
【請求項2】
上記船舶を上記港へ入港させるべく上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路とともに経時的に上記航海記録データベースに記録する実記録手段が設けられたことを特徴とする、請求項1に記載の入港用操船支援システム。
【請求項3】
上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられたことを特徴とする、請求項2に記載の入港用操船支援システム。
【請求項4】
上記航海記録データベースにおける上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段と、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段とを備えたことを特徴とする、請求項1〜3のいずれか1つに記載の入港用操船支援システム。
【請求項5】
上記港へ入港するための操船を行う前に、予め所要の気象海象状態での上記類似記録に基づき、直近の模擬通過点の選定と、同模擬通過点における上記船舶の模擬方位角の選定ならびに同船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段と、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段とが設けられたことを特徴とする、請求項1〜4のいずれか1つに記載の入港用操船支援システム。
【請求項1】
特定の港へ入港する船舶のための操船支援システムにおいて、上記港への上記船舶の入港時に種々の風向,風力および波高に対応して行われた過去の入港用操船の記録を含む航海記録データベースと、同航海記録データベースから現在の風向,風力および波高に類似した気象海象状態での入港用操船の類似記録を検索するための類似記録検索手段と、同類似記録検索手段により検索された類似記録に基づき上記港の桟橋へ向け旋回を開始すべく直近の通過点と同通過点での船体の方位角ならびに旋回のための舵角および船速とを設定する第1設定手段と、上記通過点を経由してから上記桟橋へ着桟するまでの減速の度合を設定する第2設定手段と、上記の第1および第2設定手段により実現されるべき予定航路を演算する予定航路演算手段とを備えるとともに、上記予定航路を上記桟橋と共にモニターに示す港内図表示手段を備えたことを特徴とする、入港用操船支援システム。
【請求項2】
上記船舶を上記港へ入港させるべく上記第1設定手段により設定された上記通過点での船体方位角および舵角ならびに船速が、実際に上記桟橋へ着桟するための操船に伴い上記通過点の通過時および通過後に順次修正された際に、その修正された上記の船体方位角および舵角ならびに船速を、実際の風向,風力および波高ならびに実際の航路とともに経時的に上記航海記録データベースに記録する実記録手段が設けられたことを特徴とする、請求項1に記載の入港用操船支援システム。
【請求項3】
上記港内図表示手段において、上記予定航路に上記実際の航路を重ね合わせて比較しうる航路比較手段が設けられたことを特徴とする、請求項2に記載の入港用操船支援システム。
【請求項4】
上記航海記録データベースにおける上記類似記録から上記予定航路に沿う航行時の船体周囲の風景の映像を検出する映像検出手段と、同映像検出手段の検出結果に基づいて所要の上記風景を上記モニターに表示する風景表示手段とを備えたことを特徴とする、請求項1〜3のいずれか1つに記載の入港用操船支援システム。
【請求項5】
上記港へ入港するための操船を行う前に、予め所要の気象海象状態での上記類似記録に基づき、直近の模擬通過点の選定と、同模擬通過点における上記船舶の模擬方位角の選定ならびに同船舶の旋回開始のための模擬舵角および模擬船速の選定と、上記模擬通過点を通過した後の減速の度合および方位角の模擬的選定とを行うための模擬操作手段と、同模擬操作手段により上記船舶が着桟するまでの模擬航路を上記桟橋と共に上記モニターに表示しうる模擬港内図表示手段とが設けられたことを特徴とする、請求項1〜4のいずれか1つに記載の入港用操船支援システム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−230455(P2007−230455A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−56961(P2006−56961)
【出願日】平成18年3月2日(2006.3.2)
【出願人】(501204525)独立行政法人海上技術安全研究所 (185)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年3月2日(2006.3.2)
【出願人】(501204525)独立行政法人海上技術安全研究所 (185)
【Fターム(参考)】
[ Back to top ]