
全地球型衛星航法システム
第1および第2の衛星航法システム(NSS)の各々は、第1のおよび第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)をそれぞれ含んでいる。第1および第2の複数のSV各々は、第1および第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるのに適合されている。プロセッサは、第1の複数のユニークな対応するIDに応じて第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適している。プロセッサは、第2の複数のユニークな対応するIDに応じて第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するのに適合されている。

【発明の詳細な説明】
【技術分野】
【0001】
関連する出願への相互参照
本出願は、2006年1月10日に申請され、「GNSSの導入に対する様々なオプションの評価」というタイトルが付けられた米国の仮出願60/758,244番、および2006年3月15日に申請され、「仮想GNSS時間」という表題が付けられた米国の仮出願60/782,955の優先権を主張する。両者はこの譲受人に譲渡され、引用によってここに組込まれる。
【0002】
本発明の技術分野
本発明は、一般に通信システムに関する。特に、本発明は、全地球型衛星航法システム(global navigation satellite system)を含む通信システムに関する。
【背景技術】
【0003】
無線ネットワーク 様々なレベルの結果および正確さの無線ネットワーク中の移動局の位置を計算するのに使用される様々なタイプの技術がある。支援されたGPS(A−GPS)は、無線ネットワークにおける移動局の位置を決定するために現在使用される測位技術である。A−GPSサーバは、それが短い初期位置検出時間(Time to First Fix)(TTFF)を持ち、弱い信号の捕捉を許し、移動局バッテリーの使用を最適化するために、移動局に援助データを供給する。A−GPSは、ロケーション(location)技術として単独で使用されるか、あるいは距離のような測定値を提供する他の測位技術と混成される。
【0004】
A−GPSサーバは、移動局の近似の位置に特有の無線移動局にデータを供給する。援助データは、衛星に移動局が速くロックすることを支援し、ハンドセットが弱い信号を自動追跡することを潜在的に可能にする。その後、移動局は位置計算を行なうか、あるいは計算を行うためにサーバに測定されたコード位相を随意に返す。A−GPSサーバは、例えば可視状態のGPSの衛星が十分にない場合など、それがそうでなければ可能でないかもしれない位置を計算するために携帯電話の基地局から移動局へ往復のタイミング測定のような追加情報を利用することができる。
【0005】
衛星を利用した全地球型測位システム(global positioning system)(GPS)の中における進歩、タイミング・アドバンス(TA)、および地球上を基礎とする増強された観測時間差(enhanced observed time difference)(E−OTD)位置決定技術は、移動局加入者の地理的位置(例えば緯度と経度)の正確な決定を可能にする。地理的なロケーション・サービスが、無線通信ネットワーク内に展開するとともに、そのような位置情報はネットワーク要素に格納され、搬送メッセージを使用して、ネットワーク中のノードに配送され得る。そのような情報は、SMLC(サービング移動体ロケーション・センター(Serving Mobile Location Center))、SAS(スタンド・アロンのSMLC)、PDE(位置を決定するエンテティ(Position Determining Entities))、SLP(安全なユーザプレーン・ロケーション・ロケーション・プラットフォーム(Secure User Plane Location Location Platforms))および特殊目的の移動体加入者位置データベースに格納され得る。
【0006】
特殊目的の移動体加入者位置データベースの1つの例は、第3世代の協力プロジェクト(3GPP)によって提案されたSMLCである。特に、3GPPは、SMLC間の移動体加入者位置情報の通信のために搬送プロトコルを定義した。この搬送プロトコルは、ラジオ・リソースLCS(ロケーション・サービス)プロトコルと呼ばれ、RRLPを意味し、移動体加入者の位置と関係する移動局とSMLCの間で通信された搬送メッセージを定義する。RRLPプロトコルの詳細な説明は、3GPP TS 44.031 v7.2.0(2005−11)第3世代の協力プロジェクト;技術仕様書グループGSM端ラジオ・アクセス・ネットワーク;位置サービス(LC);移動局(MS) − サービング移動体ロケーション・センター(SMLC)ラジオ・リソースLCSプロトコル(RRLP)(リリース7)、で見つかる。
【0007】
アメリカの全地球型測位システム(GPS)に加えて、ロシアのGLONASSシステム、あるいは提案されたヨーロッパのガリレオ・システムのような他の衛星測位システム(Satellite Positioning System)(SPS)も、移動局の位置ロケーション(position location)のために使用され得る。しかしながら、システムの各々は異なった仕様によって作動する。
【0008】
従って、位置ロケーションに関してさらに効率と利点を供給するために、単に1つの衛星システムではなく2つ以上の衛星システムから送られた衛星信号に基づいて移動局のための位置ロケーションを決定することができる、全地球型衛星航法システム(global navigation satellite system)(GNSS)を含む通信システムの必要がある。
【発明の開示】
【発明の概要】
【0009】
本発明は方法、装置および/またはシステムを含んでいる。その装置は、データ処理システム(それらは方法を行なう)、および、データ処理システム上で実行された時、データ処理システムに方法を行なわせる実行可能なアプリケーションを格納するコンピュータ可読媒体を含み得る。
【0010】
本発明の1つの態様によれば、第1のおよび第2の全地球型衛星航法システム(GNSS)は、第1および第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)を含んでいる。第1および第2の複数のSVの各々は、第1のおよび第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるように適合されている。プロセッサは、第1の複数のユニークな対応するIDに応答して第1の複数のSVから送信される、第1の複数の通信信号を受信し、識別するように適合されている。プロセッサは、第2の複数のユニークな対応するIDに応答して第2の複数のSVから送信される、第2の複数の通信信号を受信し、識別するように適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号を受信し、かつ識別することに応じて位置ロケーション情報を決定するように適合されている。
【0011】
本発明の他の態様によれば、本発明は、装置、方法、コンピュータ可読メモリ、および信号のプロトコルを使用する。
【0012】
本発明のこれらおよび他の態様は、添付の図面、および以下の詳細な説明から明らかになる。
【0013】
本発明の態様は、参考番号のようなものが対応する要素を指定する添付の図面の図において、限定ではなく例として示される。
【詳細な説明】
【0014】
次の説明および図面は発明の例示であり、発明の限定として解釈されるべきでない。多数の特有の詳細は、本発明についての完全な理解を提供するために、説明される。しかしながら、ある事例では、良く知られた、あるいは従来の詳細は、本発明の説明を不明瞭にしないようにするために記述されない。1つの実施例の、あるいは現在の開示における実施例の参照は、必ずしも同じ実施例ではない。また、そのような参照は、1つ以上の実施例を含んでいる。
【0015】
通信システム10
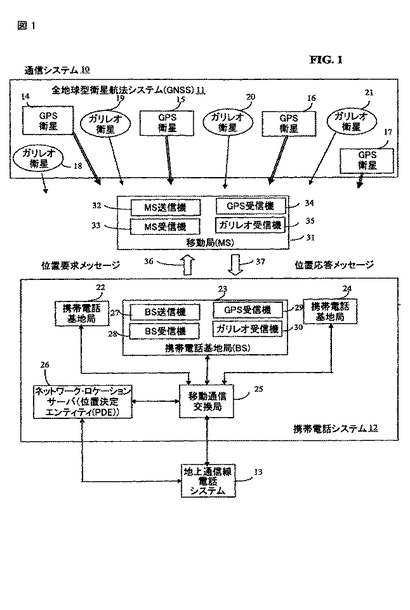
図1は、本発明の1つの態様に従って、全地球型衛星航法システム(GNSS)11、携帯電話システム12、地上通信線電話システム13を含む通信システム10のブロック図表示を示す。GNSSシステム11は、第1のGNSSに関連した衛星14−17の第1の組、および第2のGNSSに関連した衛星18−21の第2の組を含む多数の全地球型の航行衛星14−21を含んでいる。第1と第2のGNSSは、任意の異なる2つのGNSS(例えば米国の全地球型測位システム(GPS)、またはロシアのGLONASSシステムのような他の衛星測位システム(SPS)、あるいは提案されたヨーロッパのガリレオ・システム)であり得る。
【0016】
携帯電話システム12は。多数の携帯電話基地局22−24(「基地局」)、移動通信交換局25、および、位置決定エンティティ(PDE)26とも呼ばれるロケーションサーバを含んでいる。PDE26は、3GPP SMLCまたは3GPP SASであり得る。各基地局22−24は、それぞれさらに、基地局(BS)送信機27、BS受信機28、GPSの受信機29、第1のGNSS受信機(例えばGPSの受信機)29、および第2のGNSS受信機(例えばガリレオの受信機)30を含んでいる。第1と第2のGNSS受信機は、基地局22−24の内部、あるいは外部に位置してもよい。GPSの受信機29は、GPSの衛星14−17から信号を受信する。ガリレオの受信機35は、ガリレオ衛星18−21から信号を受信する。
【0017】
通信システム10は、移動局31のために無線通信を提供するものであり、そして携帯電話、固定した無線、PCS、あるいは衛星通信システムに制限されていない。通信システム10は、例えばCDMA、TDMA、FDMAあるいはGSM、あるいはそれらの組み合わせのような、任意の標準あるいはプロトコルに従って、多元接続通信を提供することができる。
【0018】
全地球型衛星航法システム(GNSS)11
GNSSシステム11は、その各々が地球表面の上の予測可能な軌道を移動する、GPS衛星14−17およびガリレオ衛星18−21のような衛星の集合体である。各衛星は、それぞれ、その衛星に特有の擬似雑音(PN)コードで変調された信号を送信する。PNコードはそれぞれ、所定の数のチップを含む。例えば、GPSにとって、PNコードは、毎ミリ秒繰り返される、1,023のチップのシーケンスである。GPSの受信機24のようなGPSの受信機は、GPSの受信機に見える衛星の各々からの信号の混合物を含むコンポジット信号を受信する。受信機の中の信号検出器は、その衛星のためのPNコードの受信信号とシフトされたバージョンの間の相関の程度の決定により、特定の衛星からの伝送を検知する。シフトオフセットのうちの1つのための相関値中の十分な質のピークが検知される場合、GPSの受信機はその衛星からの伝送を検知したと考えられる。
【0019】
無線セルラー・ネットワーク(例えば携帯電話システム12)における移動局31についての位置ロケーションを行なうために、例えば、距離(range)、擬似距離(pseudorange)、往復行程遅れ(round trip delay)、および明確な基準点(例えば、GPS衛星、擬似衛星(pseudolite)、基地局、地球の表面)に関係付けられる他のもののような多くの幾何学的にはっきりした測定を使用して、位置計算を行なうことなど、いくつかのアプローチがある。
【0020】
1つのアプローチ、いわゆるアドバンスト・フォーワード・リンク三辺測量(Advanced Forward Link Trilateration)(AFLT)または増強した観測時間差(Enhanced Observed Time Difference)(E−OTD)は、移動局31において、各々のいくつかの基地局から送信される信号(例えば、基地局22−24からの伝送)の到着時間を測定する。これらの時間は、位置決定エンティティ(PDE)(例えばロケーションサーバ)26に送信され、それは、受信についてこれらの時間を使用して、移動局31の位置を計算する。これらの基地局での送信時刻は、時間の特別の段階において、多数の基地局22-24に関連した1日の時刻(times-of-day)が、特定の誤差境界内にあるように調整される。基地局22−24の正確な位置および受信の時刻は、移動局31の位置の決定に使用される。
【0021】
AFLTシステムでは、基地局22−24からの信号の受信の時刻は、移動局31で測定される。その後、このタイミング・データは移動局31の位置を計算するために使用され得る。移動局31によって得られたタイミング情報が通信リンクによってロケーションサーバ26に送信される場合、そのような計算は、移動局31、あるいはロケーションサーバ26で行われ得る。典型的には、受信の時刻は、携帯電話の基地局22−24のうちの1つを通ってロケーションサーバ26に伝えられる。ロケーションサーバ26は、基地局から移動通信交換局25を通ってデータを受け取るために連結される。ロケーションサーバ26は、基地局アルマナック(base station almanac)(BSA)サーバを含んでいてもよい。それは、基地局の位置および/または基地局のカバーエリアを提供する。あるいは、ロケーションサーバ26およびBSAサーバは互いと離れているかもしれない。また、位置決定のために基地局のアルマナックを得るために、ロケーションサーバ26は基地局と通信する。移動通信交換局25は、信号が移動局31から他の電話(例えばPSTS上の地上通信線電話あるいは他の携帯電話)への間で伝えられるように、信号(例えば音声、データおよび/またはビデオ通信)を、地上通信線公衆電話交換システム(PSTS)13との間で供給する。ある場合には、ロケーションサーバ26が、さらに携帯電話のリンクによって移動通信交換局25と通信してもよい。ロケーションサーバ26は、さらにこれらの放射の相対的なタイミングを決定するために基地局22−24のいくつかのものからの放射をモニターしてもよい。
【0022】
到着の時間差(Time Difference of Arrival)(TDOA)と呼ばれる別のアプローチでは、移動局31からの信号の受信の時刻は、いくつかの基地局22−24で測定される。このタイミング・データは、それから、移動局31の位置を計算するために、ロケーションサーバ26に伝えられてもよい。
【0023】
さらに、位置ロケーションを行う3番目のアプローチは、アメリカの全地球型測位システム(GPS)あるいは、ロシアのGLONASSシステムまたは提案されたヨーロッパのガリレオ・システムのような他の衛星測位システム(SPS)のための受信機の移動局31における使用を含んでいる。GLONASSシステムは、異なる擬似乱数的なコードを利用するのではなく、わずかに異なるキャリア周波数を利用することにより、異なる衛星からの放射が互いを区別される点でGPSのシステムと主として異なる。
【0024】
この状況において、そしてガリレオ・システムで、本質的に、以前に記述された回路類およびアルゴリズムはすべて適用可能である。ここに使用される用語「GNSS」は、ロシアのGLONASSシステムおよび提案されたヨーロッパのガリレオ・システムを含むそのような代替の衛星測位システムを含んでいる。
【0025】
3番目のアプローチにおいて、GPSの受信機34は、衛星14−17のうちのいくつかからの伝送の検知によりその位置を評価する。各検知された伝送については、送信の時刻と到着時刻の間で遅れ(チップまたはチップの分数の期間で)を評価するために、受信機は、PNコードのシフトを使用する。測位信号の既知の伝播速度を与えられて、GPSの受信機は、それ自体と衛星の間の距離を推定する。この推定された距離は、衛星のまわりの球体を定義する。GPSの受信機34は、衛星の各々の正確な軌道および位置を知っており、これらの軌道と位置の最新版を連続的に受け取る。この情報から、GPSの受信機34は、4つの衛星についての球体が交差するポイントからその位置(かつ現在の時刻)を決定することができる。GPSの受信機34と結合して、あるいは、その代わりの選択肢として、ガリレオの受信機35は、衛星18−21の少なくとも4つからの伝送の検知により、その位置を評価し得る。
【0026】
本発明の方法および装置はGPSの衛星に関して記説明されたけれども、その説明が擬似衛星あるいは衛星と擬似衛星の組み合わせを利用する測位システムに等しく適用可能であることは、評価されるだろう。擬似衛星は、地上の送信機であり、それは一般にGPS時間と同期しているL周波帯キャリア信号上で変調された(GPSの信号と同様の)PNコードを放送する。送信機は、それぞれ、遠隔の受信機によって識別を許すためにユニークなPNコードを割り当てられ得る。擬似衛星は、トンネル、鉱山、建物、あるいは他の囲まれたエリアのように、周回軌道衛星からのGPSの信号が利用不可能かもしれない状況において有用である。用語「衛星」は、ここに使用されるように、擬似衛星、あるいは擬似衛星の等価物を含むことが意図される。また、用語、GPSの信号は、ここに使用されるように、擬似衛星あるいは擬似衛星の等価物からのGPSのような信号を含むことが意図される。
【0027】
衛星測位信号(SPS)信号に受信機を利用するような方法は、完全に自律かもしれないし、あるいは援助データを提供するかあるいは位置計算を共有するために携帯電話ネットワークを利用してもよい。簡略表記として、これらの様々な方法は「GPS」と呼ばれる。そのような方法の例は米国特許5,945,944;5,874,914;6,208,290;5,812,087;および5,841,396に記述される。
【0028】
例えば、米国特許5,945,944は、携帯電話伝送信号から正確な時間情報を得る方法について記述する。それは、受信機の位置を決定するGPSの信号と結合して使用される。米国特許5,874,914は、受信機の位置を決定するために、通信リンクによって受信機に視界衛星におけるドップラー周波数シフトを送信する方法について記述する。米国特許5,874,914は、さらに受信機がその位置を決定するのを助ける通信リンクを通して、受信機に衛星アルマナックデータ(あるいはエフェメリス(ephemeris)・データ)を送信する方法について記述する。米国特許5,874,914は、さらにGPS信号獲得のために受信機で参照信号を提供する携帯電話システムの高精度の搬送周波数信号にロックする方法について記述する。米国特許6,208,290は、SPS信号処理時間の短縮のために近似のドップラーを決定するために受信機の近似の位置を使用する方法について記述する。米国特許5,812,087は、受信機の位置を決定するためにレコードのうちの1つが受信機で受信される時を決定するために、異なるエンティティで受信された衛星データメッセージの異なるレコードを比較する方法について記述する。
【0029】
実際的な廉価な実装では、MSの受信機33と、GPSの受信機34および/またはガリレオの受信機35の両方は、同じ筐体へまとめられ、そして、受信機回路類および/またはアンテナのような共通の電子回路類は事実上共有することができる。
【0030】
さらに上記の方法とは別の変形では、往復行程遅れ(round trip delay)(RTD)は、基地局22、23、あるいは24から移動局31へ送られ、次に対応する基地局22、23、あるいは24に返される信号について見出される。類似しているが代替方法では、往復行程遅れは、移動局31から基地局へ送られ、次に移動局31に返される信号について見出される。一方向の時間遅れの評価を決定するために、往復行程の遅れは、各々2で割られる。基地局の位置についての知識と一方向の遅れを加えると、移動局31の位置を地球上の1つの円に制約する。その後、別個の基地局からのそのような2つの測定が2つの円の交差に帰着する。それは、次には地球上で2点まで位置を制約する。3番目の測定(さらに到来角またはセルのセクター)は、曖昧さを解決する。
【0031】
GPSシステムを備えた、AFLTあるいはTDOAのような別の測位方法の組み合わせは、「ハイブリッド」システムと呼ばれる。例えば、米国特許5,999,124は、ハイブリッドシステムについて記述する、その中でセルベースのトランシーバの位置は、少なくとも以下の組み合わせから決定される: i) セルベースのトランシーバと通信システムの間のセルベースの通信信号におけるメッセージの行程の時間に相当する時間測定、および ii)SPS信号の行程の時間に相当する時間測定。
【0032】
高度援助は、移動装置の位置を決定する様々な方法の中で使用されている。高度援助は、典型的に高度の擬似測定に基づいている。移動局31の位置の高度についての知識は、その中心が地球の中心にある球体(あるいは楕円体)の表面に移動局31の可能な位置を制約する。この知識は、移動局31の位置を決定するのに必要な独立した測定の数を減らすために使用され得る。例えば、米国特許6,061,018は、評価された高度がセルのオブジェクトの情報から決定される場合の方法について記述する。それは、移動局31と通信するセル・サイト送信機を持っているセル・サイトかもしれない。
【0033】
測定の最小のセットが利用可能な場合、ナビゲーション方程式のユニークな解は、移動局31の位置ついて決定される。1つを超える余分な測定が利用可能な場合、「最良」の解は、すべての利用可能な測定に最良適合するように得られるかもしれない(例えばナビゲーション方程式の残余のベクトルを最小化する最小2乗解手順を通じて)。
【0034】
余分の測定がある場合、残余のベクトルが典型的に0でないので、測定における雑音か誤差により、インテグリティ(integrity)・モニタリング・アルゴリズムは測定がすべて互いと一致しているかどうか判断するために使用することができる。
【0035】
例えば、従来の受信機の自律的インテグリティ・モニタリング(Receiver Autonomous Integrity Monitoring)(RAIM)アルゴリズムは一貫性の問題が余分の測定のセットにあるかどうか検知するために使用され得る。例えば、あるRAIMアルゴリズムが、ナビゲーション方程式のための残余のベクトルの大きさが閾値未満かどうか判断する。残余のベクトルの大きさが閾値より小さい場合、測定は一貫していると考えられる。残余のベクトルの大きさが閾値より大きい場合、インテグリティの問題がある、その場合には余分の測定の1つは、それは最多の矛盾を引き起こすように見える、その後、改善された解を得るために削除されてもよい。
【0036】
携帯電話システム12
多数の携帯電話基地局22−24は、典型的に無線通信で地理的な区域を覆うように整えられる。また、先行技術において良く知られているように、これらの異なる基地局22−24は少なくとも1つの移動通信交換局25につながれる。したがって、多数の基地局22−24は、地理的に分布されるだろうが、移動通信交換局25によって連結されるだろう。携帯電話システム12は、基準GPSの受信機29(それらはディファレンシャルGPS情報を提供する)のネットワークに接続され、移動局の位置の計算において使用するためのGPSのエフェメリス・データを提供し得る。携帯電話システム12は、基準ガリレオの受信機30(それらはディファレンシャル・ガリレオ情報を提供する)のネットワークに接続され、移動局の位置の計算において使用するためのガリレオのエフェメリス・データを提供し得る。携帯電話システム12は、モデムあるいは他のコミュニケーション・インタフェースによって、他のコンピュータあるいはネットワーク・コンポーネント、および/または、911通話に応答する公共の安全応答ポイントのような、緊急オペレーターによって操作されるコンピュータ・システムにつながれる。IS−95に準拠の符号分割多元接続システムでは、基地局またはセクター22−24は、それぞれパイロット信号を送信する。それは、繰り返す擬似ランダム信号(PN)コード(それはユニークにその基地局を識別する)で変調される。例えば、IS−95に準拠の符号分割多元接続システムについては、PNコードは32,768のチップのシーケンスであり、それは、26.67 ミリ秒毎に繰り返される。
【0037】
ロケーションサーバ26は、典型的にはモデムまたはネットワークインターフェイスのような通信装置を含んでいる。ロケーションサーバ26は、通信装置(例えばモデムあるいは他のネットワークインターフェイス)を通って多くの異なるネットワークにつながれてもよい。そのようなネットワークは、移動通信交換局25か多数の移動通信交換局、陸上の電話システム交換局、携帯電話基地局22−24、他のGPS信号受信機、他のガリレオの受信機あるいは他のプロセッサか、ロケーションサーバを含んでいる。ロケーションサーバ26を使用する方法の様々な例は、次のものを含む多数の米国特許に記述されている:米国特許5,841,396、5,874,914、5,812,087および6,215,442。
【0038】
ロケーションサーバ26(それはデータ処理システムの一形態である)は、バスを含んでおり、それはマイクロプロセッサおよびROMおよび揮発性のRAMおよび不揮発性メモリにつながれる(各々示されていない)。プロセッサはキャッシュ・メモリー(示されていない)につながれる。バスは、これらの様々なコンポーネントをともに相互に連結させる。ロケーションサーバ26は、不揮発性メモリを利用してもよく、それは、ネットワーク記憶装置(それはモデムまたはイーサネット(登録商標)のインターフェースのようなネットワークインターフェイスを通ってデータ処理システムにつながれる)のように携帯電話システム12から遠隔である。バスは、当該技術分野において周知なように、様々なブリッジ、コントローラおよび/またはアダプタによって互いに接続された1つ以上のバスを含んでいてもよい。多くの状況で、ロケーションサーバ26は、人間の援助なしでそのオペレーションを自動的に行なうことができる。人間の相互作用が必要であるいくつかの設計では、I/Oコントローラ(示されていない)は、ディスプレイ、キーボードおよび他のI/O装置と通信することができる。より少数のコンポーネントあるいは恐らくより多くのコンポーネントがあるネットワーク・コンピューターおよび他のデータ処理システムが、本発明と共に使用されてもよく、ロケーションサーバあるいはPDEとして働いてもよいことはさらに認識されるだろう。
【0039】
移動局31
携帯電話の移動局31(「移動局」)は、第1のGNSS受信機(例えばGPSの受信機)34および第2のGNSS受信機(例えばガリレオの受信機)35、移動局(MS)送信機32、また移動局受信機33、を含んでいる。GPSの受信機34は、GPSの衛星14−17から信号を受信する。ガリレオの受信機35は、ガリレオの衛星18−21から信号を受信する。MSの送信機32は、BS受信機28に通信信号を送信する。MSの受信機33は、BS送信機27から通信信号を受信する。
【0040】
移動局31の他の構成要素(それらは図1に示されていない)は、例えば、GPSのアンテナ、ガリレオ・アンテナ、携帯電話アンテナ、プロセッサ、ユーザ・インターフェース、ポータブル電源およびメモリ素子を含んでいる。プロセッサは、さらにプロセッサー・ポートおよび他のモバイル機能を含んでいる。
【0041】
移動局31において、衛星信号の受信アンテナと衛星信号の受信機は、それぞれ、衛星信号の受信および処理に必要な機能を行なうために、捕捉およびトラッキング回路類(示されていない)のような回路類を含んでいる。衛星信号(例えば1つ以上の衛星14−17(および/または18−21)から送信された信号)は、衛星アンテナおよび捕捉およびトラッキング回路への入力によって受信される。それは種々の受信される衛星についてのPN(擬似乱数的な雑音)コードを取得する。回路(例えば相関インディケーター(示されてない))によって生成されたデータは、プロセッサによって単独であるいは受信した他のデータと結合して処理される、あるいは、位置ロケーション・データ(例えば緯度、経度、時間、衛星など)を生成するために携帯電話システム12によって処理される。
【0042】
携帯電話のアンテナおよび携帯電話の送受信機(例えばMSの送信機32およびMSの受信機33)は、通信リンクによって送信され、および受信される通信信号の処理に必要な機能を行なうための回路類を含んでいる。通信リンクは、典型的には、通信アンテナ(示されていない)を有する1つ以上の基地局22−24のような別のコンポーネントへの無線周波数通信リンクである。
【0043】
セルラー送受信機は伝送/受信交換局(示されていない)を含んでいる。それは通信アンテナおよびセルラー送受信機間で通信信号(例えば無線周波数信号)を送る。いくつかの移動局では、帯域分割用のフィルタ(すなわち「デュプレクサ」)は、T/Rスイッチの代わりに使用される。受信通信信号は、携帯電話の送受信機における通信受信機へ入力され、そして処理用のプロセッサに渡される。プロセッサから送信される通信信号は、各々送受信機内にある変調器および周波数変換装置(示されていない)に伝えられる。携帯電話の送受信機中のパワーアンプ(示されない)は、信号の利得を1つ以上の基地局22−24への伝送のための適切なレベルに増加させる。
【0044】
移動局31の1つの実施形態では、GPSの受信機24および/またはガリレオの受信機35の捕捉およびトラッキング回路類によって生成されたデータは、1つ以上の基地局22−24へ通信リンク(例えばセルのチャネル)を通して送信される。その後、ロケーションサーバ26は、1つ以上の衛星受信機34および35からのデータ、そのデータが測定された時刻、および、基地局自身の衛星受信機あるいはそのようなデータの他のソースから受け取られたエフェメリス・データ、に基づいて移動局31の位置を決定する。その後、位置ロケーションデータは移動局31へ、あるいは他のリモート位置へ送信され得る。通信リンクを利用するポータブル受信機に関するより多くの詳細が、一般に割り当てられた米国特許5,874,914番に開示されている。
【0045】
移動局31は、ユーザ・インターフェース(示されていない)を含んでいてもよい。それはさらにデータ入力装置およびデータ出力装置(いずれも示されていない)を提供し得る。
【0046】
データ入力装置は、典型的には、ユーザから手動で、あるいは別の電子装置から自動的に、入力データを受け取ることに応じて、プロセッサデータを供給する。手動入力については、データ入力装置は、例えば、キーボードとマウスであるだけでなく、タッチ・スクリーン、あるいはマイクロホンおよび音声認識アプリケーションかもしれない。
【0047】
データ出力装置は、ユーザまたは別の電子装置による使用について典型的にはプロセッサからのデータを提供する。ユーザへの出力については、データ出力装置は、例えば、プロセッサからのディスプレイ信号を受け取ることに応じて1つ以上のディスプレイ・イメージを生成するディスプレイであるが、それだけでなくスピーカーまたはプリンタかもしれない。ディスプレイ・イメージの例は、例えば、テキスト、グラフィックス、ビデオ、写真、イメージ、グラフ、図表、フォームなどを含んでいる。
【0048】
移動局31は、例えば、さらにコンピュータ・メモリー装置あるいは、他の実体的な、あるいはコンピュータ可読の記憶媒体のような、任意のタイプのデータストレージ装置を意味するメモリ装置(示されていない)を含んでいてもよい。メモリ装置は、1つ以上の場所に配置され、かつ移動局の特別の実装に依存して、1つ以上の技術として実装された、1つ以上のメモリ装置を表わす。さらに、メモリ装置は、プロセッサよって可読で、データ、および/またはプロセスを具体化する一連の命令を格納することができる任意の装置かもしれない。メモリ素子の例は、RAM、ROM、EPROM、EEPROM、PROM、ディスク(ハードあるいはフロッピー(登録商標))、CD−ROM、DVD、フラッシュメモリなど、を含んでいる 、しかしこれらに制限されない。
【0049】
移動局31は、移動局31のオペレーションを制御するプロセッサ(示されていない)を含んでいてもよい。プロセッサおける他の移動体の機能は、まだここに記述されていない、移動局31の任意のあるいはすべての他の機能を表わす。そのような他の移動体の機能は、例えば、移動局が電話をし、データを通信することを可能にするために移動局31を操作することを含んでいる。
【0050】
移動局31は、ポータブル電源(示されていない)を含むことができる。それは移動局31の電気的な要素のためにポータブルな電気的なエネルギーを格納し提供する。ポータブル電源の例は、バッテリーと燃料電池を含んでいる、しかしこれらに制限されない。ポータブル電源は、再充電可能かもしれない、あるいはそうではないかもしれない。ポータブル電源は典型的には制限のある量の格納された電気的なエネルギーを持っており、移動局が作動し続けることができるように、ある量の使用の後に交換されるか、更新される必要がある。
【0051】
移動局31は、固定の(つまり、静止している)および/またはモバイル(つまりポータブル)かもしれない。移動局31は、下記の1つ以上を含んでいる様々な形式でインプリメントされてもよいが、これらに制限されなくてもよい。パソコン(PC)、デスクトップ・コンピュータ、ラップトップ・コンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパー・コンピュータ、ネットワークベースの装置、データ処理装置、携帯情報端末(PDA)、スマート・カード、携帯電話、ページャー、および腕時計。
【0052】
位置ロケーション・アプリケーション
位置ロケーション・アプリケーションの例は、陸、海および空の上の無限に様々なアプリケーションを含んでいている。科学界は、GPSをその正確タイミング能力および位置情報データについて利用する。測量技師は、GPSを仕事の増加する部分に利用する。位置ロケーションのレクリエーションの用途は、利用可能なレクリエーションのスポーツの数とほとんど同じくらい変えられる。位置ロケーションは、単に少数の名前をあげると、ハイカー、ハンター、マウンテンバイク乗りおよびクロスカントリー・スキーヤーに普及している。彼または彼女がどこにいるかを追跡する必要がある人、指定された位置への彼または彼女の道を見つける必要がある人、あるいは、彼または彼女がどんな方向に、かつどれくらい速く進んでいるかを知る必要がある人なら誰でも、全地球型測位システムの利点を利用することができる。位置ロケーションは、今や、乗り物においても同様にありふれている。いくつかの基本システムは、適所にあり、ボタンの押下(例えば急派センターにあなたの現在位置を送信することにより)で緊急路傍援助を提供する。より精巧なシステムは、さらに、乗り物の位置を街路図上に示す。現在、これらのシステムは、ドライバが彼または彼女がどこにいるか追跡し、指定の位置に到着することをフォローアップするように最良のルートを示唆することを可能にする。
【0053】
位置ロケーションは、緊急時に携帯電話の位置を決定するのに、および位置ベースのサービスに役立つ。米国における携帯電話の位置ロケーションの配備は、連邦通信委員会(FCC)の増強された9−1−1のマンデート(mandate)の結果である。そのマンデートは、ネットワークベースの解決策について、67パーセントの呼について100メートルの精度、95パーセントの呼について300メーターの精度を要求し、送受信機ベースの解決策について、67パーセントの呼について50メーター、95パーセント呼について150メーターを要求する。緊急電話が開始される場合、救急サービス調整センター―公共の安全回答ポイント(Public Safety Answering Point)(PSAP)は、MLCの中で計算される位置を利用するだろう。ヨーロッパとアジアでは、展開は、位置ベースのサービス(LBS)によって推進されている、しかしながら、携帯電話の位置の救急サービスについての要求は、これらの地域で確立されているか、確立されつつある。
【0054】
全地球型衛星航法システム(GNSS)
支援された(Assisted)―GNSS(A−GNSS)、そのほかに「発展した(expanded)」あるいは、「拡張した(extended)」GNSS(e−GNSS)と呼ばれる、は、GPSに加えて他の人工衛星航法システムまで概念を拡張する。例えば、全て各システムのための異なる基準に基づいた様々な信号を送信しながら、10年の範囲内で惑星の周囲を回っている、GPS、GLONASS、ガリレオ、および他の衛星を含めた80個のGNSS衛星があり得る。これは、受信機(例えば、モバイルか固定のいずれか)に、さらに多くの衛星およびそれらの送信する信号に対するアクセスを与えるだろう、それは、位置ロケーション決定の精度および効率の両方を改善することができる。より多くの衛星は、位置精度が衛星のジオメトリにはより敏感ではなくなることを意味し、そして、位置計算を行う場合により大きな冗長度を提供する。
【0055】
単純化されたGNSSアーキテクチャーは、図1に示される。携帯電話システム12、あるいは他のタイプの広域基準ネットワーク(WARN)は、無線ネットワークのカバーエリアに地理的に配置されるGNSS受信機のネットワークである。携帯電話システム12は、GNSS衛星から放送ナビゲーション・メッセージを集めて、キャッシングのためにA−GNSSサーバ(例えばPDE26)にそれを供給する。移動局31が緊急呼び出しを行う、すなわち、位置を必要とするサービスが起動され、そしてメッセージがA−GNSSサーバへ送られる。そのPDE26は、要求されたGNSS支援データを、1つ以上の基地局22−24の位置を近似の位置として使用して計算し、そして、移動局31にそれを供給する。
【0056】
標準
A−GPSサーバの異なるコンポーネントは、3GPP TS 23.271、TS 43.059およびTS 25.305の中で定義されている。サービング移動体ロケーション・センター(Serving Mobile Location Center)(SMLC)は、無線ネットワークの一部として展開され、そして、その目的は、ネットワーク内の送受話器の位置を決定することである。
【0057】
SMLCはGSM/GPRSネットワーク中で走り、ユーザ航空機ソリューションを備えた異なるワイヤレス・アクセス・タイプをサポートする場合、UMTSネットワークあるいはSUPL位置プラットフォーム(SLP)中でスタンド・アロンのSMLC(SAS)として知られている。SMLCは、送受話器ベースおよび送受信機支援のバージョンにおけるA−GPSを含む、送受話器ベースおよびネットワークベースの無線位置ロケーション方法をすべてサポートすることができる。
送受話器を使用するA−GPSの通信ためのプロトコルをサポートしている、いくつかの相違した仕様(つまり標準)がある。GSMネットワークは、RRLP仕様を使用する。UMTSネットワークは、ラジオ資源管理(RRC)仕様を使用する。符号分割多元接続ネットワークは、TIA IS−801および3GPP2 C.S0022仕様を使用する。これらの仕様の各々は、同じ基本的な情報を符号化する異なる方法を指定するが、使用された無線通信技術に特有である。現在の説明は、RRLP仕様の修正についての例(つまりオプション)について記述するけれども、RRC仕様、IS−801およびC.S0022仕様、または他の仕様は、同じまたは同様の結果を達成するために修正されてもよい。
【0058】
RRLP仕様は、位置測定要求メッセージ36(図1)(それは移動局31に測位指示および恐らく援助データを提供する)および位置測定応答メッセージ37(図1)(それは移動局31の位置評価あるいは移動局31から携帯電話システム12までの擬似距離測定値を供給する)を含んでいる。RRC仕様、IS−801/C.S0022仕様または他の仕様は、同じか、または同様の効果を達成する要求および/または応答メッセージを含んでいてもよい。
【0059】
RRLP位置測定メッセージを修正するための4つのオプション
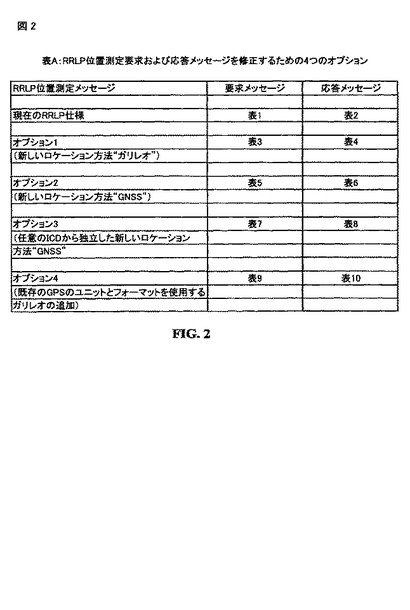
図2は、本発明の1つの態様による、RRLP仕様用のRRLP位置測定要求メッセージ36(図1を参照)およびRRLP位置測定応答メッセージ37(図1を参照)の修正に対する4つのオプションを表わす表Aを例示する。表Aの中で、RRLP位置測定要求メッセージ36およびRRLP位置測定応答メッセージ37は、表1および2中の現在のRRLP仕様の中でそれぞれ表わされる。オプション1は、表3および4中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション2は、表5および6中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション3は、表7および8中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション4は、表9および10中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。
【0060】
オプション1は、新しい衛星位置測定方法として、ガリレオ/GNSSを導入する。
【0061】
オプション2は、「GNSSロケーション方法」を導入する、また新しいGNSS情報エレメント中に様々な星群(GPS、ガリレオ、および可能性のある将来の衛星ナビゲーションか、オーグメンテーション・システム)の詳細をカプセル化する。
【0062】
オプション3は、特定の星群の任意のインタフェース・コントロール・ドキュメント(ICD)とは独立した「GNSS位置測定方法」を導入する。
【0063】
オプション4は、オプション1、2および3の各々を評価し、かつ比較した後、オプション2および3の利点の組み合わせを導入する。
【0064】
オプション1、2および3は、ガリレオ/GNSSがRRLP仕様にどのように加えることができたかについて記述されている。
【0065】
位置測定要求および応答メッセージを修正する方法
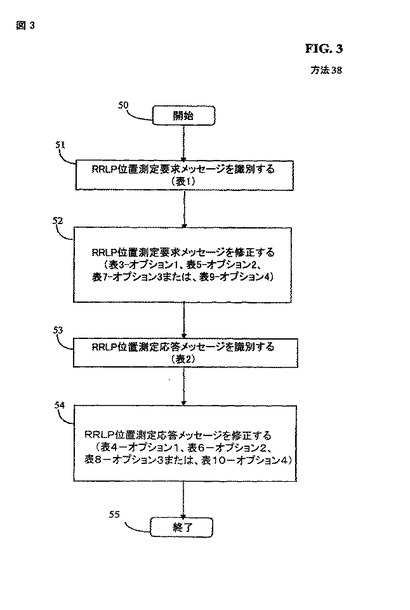
図3は、本発明の1つの態様による4つのオプションのうちの1つに従う現在のRRLP仕様用の、RRLP位置測定要求メッセージ36およびRRLP位置測定応答メッセージ37を修正する方法38を示す。ブロック50において、方法38は開始する。ブロック51において、方法38は、RRLP位置測定要求メッセージ36(例えば表1)を識別する。ブロック52において、方法38は、オプション1(例えば表3)、オプション2(例えば表5)、オプション3(例えば表7)またはオプション4(例えば表9)により、RRLP位置測定要求メッセージ36(例えば表1)を修正する。ブロック53では、方法38は、RRLP位置測定応答メッセージ37(例えば表2)を識別する。ブロック54では、方法38は、オプション1(例えば表4)、オプション2(例えば表6)、オプション3(例えば表8)、あるいはオプション4(例えば表10)により、RRLP位置測定応答メッセージ37(例えば表2)を修正する。
【0066】
表3、5、7および9の各々は、それぞれ、オプション1、2、3および4のための、修正済のRRLP位置測定要求メッセージを表わしており、また、第2のGNSSシステム(例えばガリレオ)をサポートするための新しい要素60に加えて、表1に示されている、現在のRRLP位置測定要求メッセージの要素も含んでいる。表4、6、8および10の各々は、それぞれ、オプション1、2、3および4のための修正済のRRLP位置測定応答メッセージを表わしており、また、GNSSシステム(例えばガリレオ)用の新しい要素60に加えて、表2に示されている現在のRRLP位置測定応答メッセージの要素も含んでいる。参照番号60は、一般に表3−10の各々において新しい要素を識別する。しかしながら、それらの表の各々において新しい要素は異なっているかもしれない。表3−10の各々において、これは必要条件ではないが、現在の要素は最初にリストされ、新しい要素が後続する。したがって、各々の表3、5、7および9の始まりは、表1の要素と同じであり、それを含んでおり、また、表4、6、8および10の各々の始まりは、表2の要素と同じであり、それを含んでいる。
【0067】
現在のRRLP位置測定要求および応答メッセージ
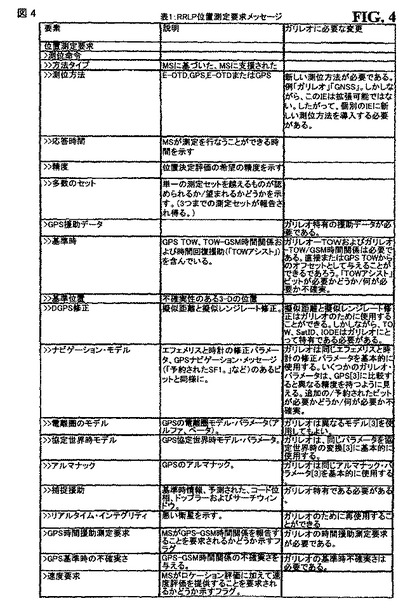
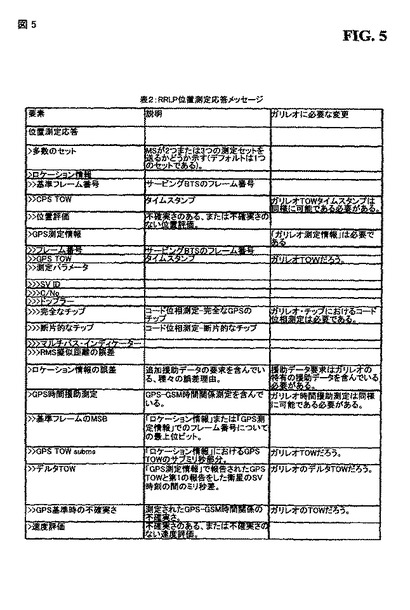
図4は、本発明の1つの態様による、現在のRRLP仕様の、RRLP位置測定要求メッセージ36を表わす表1を示す。図5は、本発明の1つの態様による、現在のRRLP仕様の、RRLP位置測定応答メッセージ37を表わす表2を示す。
【0068】
図4と5は、それぞれ、支援されたGPS(A−GPS)のためのRRLP仕様に現在、記述されているような、現在のRRLP位置測定要求および応答メッセージを示し、そしてRRLP仕様へガリレオを導入するための変更を示す。RRLP仕様(TS 44.031)は、主なGERAN仕様であり、それはガリレオ/GNSSをサポートするために修正される必要がある。RRLP仕様は、測位指示および援助データ要素の詳細を含んでいる。
【0069】
RRLP仕様は、位置測定要求メッセージ(それは移動局31に測位指示および恐らく援助データを提供する。)および位置測定応答メッセージ(それは移動局31から携帯電話システム12へ擬似距離測定値または移動局31の測定位置評価を供給する。)を含んでいている。
【0070】
ガリレオ/GNSSの導入に必要とされた変更は、表1および2の右端のカラムに要約される。右端のカラムのブランクの記入は、変更が必要ではないことを示す。右端のカラムで示される変更は、任意の特別のオプション(つまり、オプション1−4)に特有ではなく、どの既存のA−GPSパラメータが再使用されてもよいか、あるいは、交換され、拡張されるか、そうでなければ修正される必要があってもよいか示す。ある場合には、いくつかのパラメータ変更が終了することができる前に、ガリレオについてのより多くの情報が必要だろう(例えば最終仕様書)。
【0071】
表1および2の各々において、さらに表3〜10においても同様に、「>」記号の数は、ASN.1符号化のフィールドの階層的レベルを示す。
【0072】
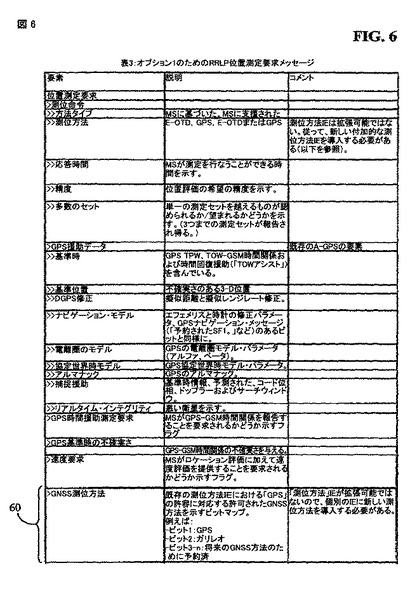
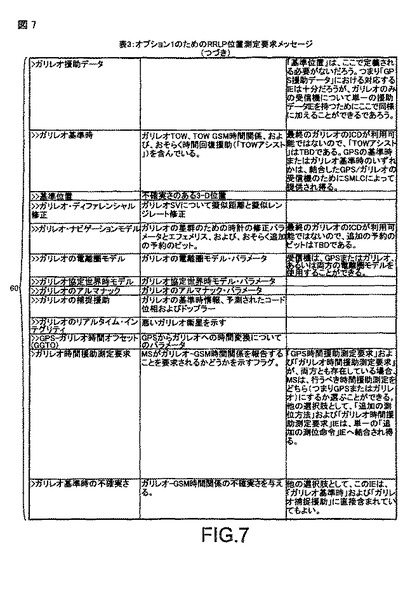
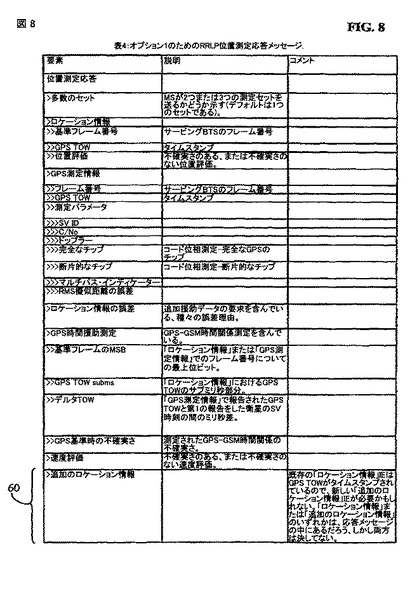
オプション1 − 新しいロケーション方法「ガリレオ」
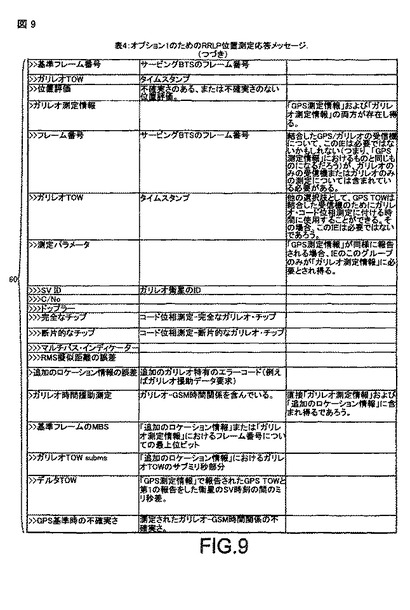
図6と7は、本発明の1つの態様により、オプション1に従って修正済のRRLP位置測定要求メッセージを表わす表3を示す。図8と9は、本発明の1つの態様により、オプション1に従って修正済のRRLP位置測定応答メッセージを表わす表4を示す。
【0073】
オプション1において、新しいガリレオの要素60は、表1(A−GPSに似ている)に示されるように、現在のRRLP仕様に加えられる。現在のA−GPSに特有の情報要素は、使用され続けられ、そして、新しいガリレオに特有の情報要素60が加えられる。
【0074】
RRLP仕様のための修正は、リリース7拡張コンテナーにおける新しい情報要素の導入であり、位置測定要求メッセージおよび位置測定応答メッセージについての表3および4に、それぞれ要約される。
【0075】
オプション1は、いくつかの方法でインプリメントされ得る、そして、表3および4は、一例を記述した。
【0076】
オプション1の利点は下記を含んでいる:
1.現在のRRLPプロトコルの素直な展開。
【0077】
既存のA−GPS情報要素は、結合したGPS−ガリレオ受信機のためにまだ使用されるだろう。A−GPSのみの受信機は既存のA−GPS情報要素を使用し続けるだろう。また、ガリレオのみの受信機は、新しい追加情報要素のみを、あるいは主として追加情報要素を使用するだろう。
【0078】
2.既存のプロトコルおよびA−GPS実装の上位互換は維持されている。
【0079】
既存のA−GPSの実装(SMLCとMS)は、ガリレオの導入によって影響されいであろう。
【0080】
3.従来の支援されたGNSSモードは、異なるユーザ・アルゴリズムを要求しないであろう。
【0081】
オプション1の課題は下記を含んでいる:
1.援助データの要素は、ICD特有である。従って、最終のガリレオのICDが利用可能となる前に、必要なガリレオ援助データの要素をすべて定義することは可能ではないかもしれない。
【0082】
2.一般的なアプローチはない。新しいGNSSシステムを加えなければならないごとに、その仕様はそれに応じて修正されなければならない。
【0083】
オプション2 − 新しいロケーション方法、「GNSS」
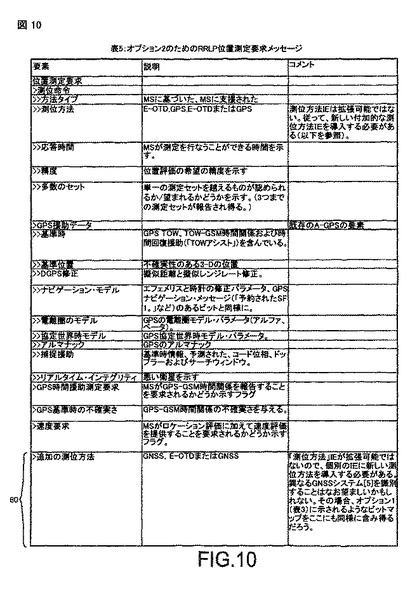
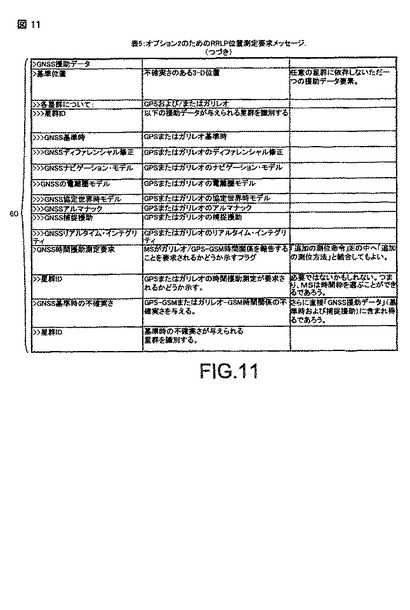
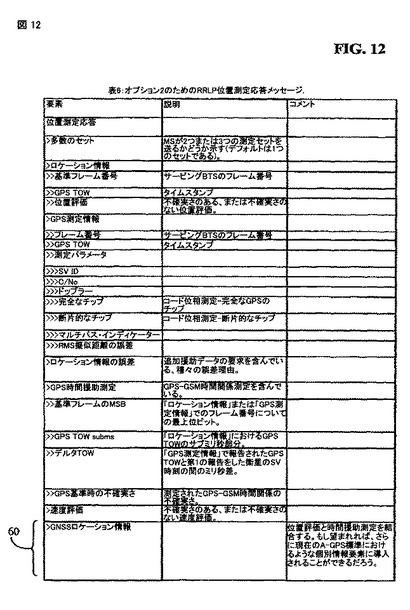
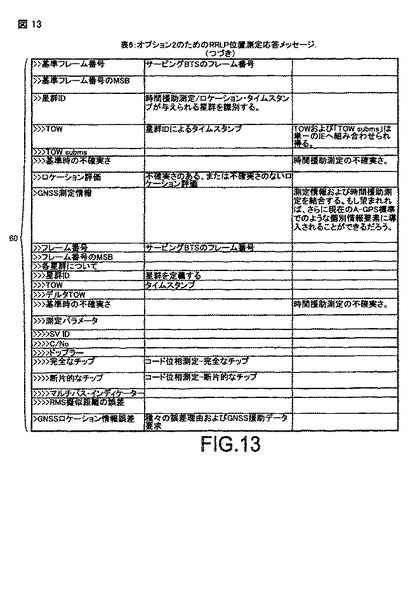
図10と11は、本発明の1つの態様により、オプション2に従って修正済のRRLP位置測定要求メッセージを表わす表5を示す。図12と13は、本発明の1つの態様により、オプション2に従ってRRLP位置測定応答メッセージを表わす表6を示す。
【0084】
オプション2において、新しいロケーション方法「GNSS」は導入され、そして、GPSおよび/またはガリレオ特有の情報要素はGNSS情報要素中でカプセル化される。
【0085】
RRLP仕様に必要な修正は、リリース7拡張コンテナーにおける新しい情報要素の導入であり、そして位置測定要求および位置測定応答メッセージ用の表5および6にそれぞれ要約される。
【0086】
オプション2はいくつかの方法で実装されてもよい。また、表5および6は一例について記述した。表5および6に示される例は、共通のASN.1符号化がGPSとガリレオにとって可能であると仮定する提案をフォローアップする。
【0087】
オプション2の利点は下記を含んでいている:
1.オプション2は、同じGNSSシグナリングを共有するGPSおよびガリレオと十分に互換性をもつならば、任意の新しいGNSSシステム用のRRLPにおけるそれほど付加的でないASN.1符号化に帰着できる。
【0088】
2.従来の支援されたGNSSモードは異なるユーザ・アルゴリズムを要求しなくてもよい。
【0089】
オプション2の課題は下記を含んでいる:
1.2つのブランチがRRLPに作成される。現在のA−GPSインプリメンテーションは、既存の情報要素を使用し続けるだろう、そして将来のGPS/ガリレオのインプリメンテーション(SMLCとMS)は、既存のA−GPS情報要素および新しいGNSS情報要素の両方をサポートしなければならないだろう。ターミナルとSMLCがGNSS対応である場合、新しいGNSS情報要素のみが、A−GPSのみの場合でさえ使用され得る。しかしながら、すべてのネットワークにおけるすべてのSMLCが両方のプロトコル・ブランチ(例えば、GNSSがリリース7に加えられると仮定すれば、そのとき、すべてのSMLCがリリース7をサポートするまで、新しいリリース7対応のターミナルは、さらにリリース6もサポートせねばならない)をサポートするであろうことを保証することができないので、GNSS対応のターミナルは、なお既存のA−GPS情報要素を同様にサポートしなければならないだろう。
【0090】
2.A−GPS関連情報要素は、既存のRRLPおよび新しいGNSSブランチに、2度定義されている。
【0091】
3.援助データ要素はICD特有である、しかし共通のASN.1符号化を伴う。共通のASN.1符号化は実現可能ではないかもしれない。
【0092】
これらの将来のシステムが、GPSおよびガリレオと十分に互換性をもたない場合、このオプションを使用する将来のナビゲーションあるいはオーグメンテーション・システムを加えることは、困難あるいは不可能かもしれない。その場合、異なるオプション(例えば、オプション1またはオプショ4)に戻ることが必要かもしれない。
【0093】
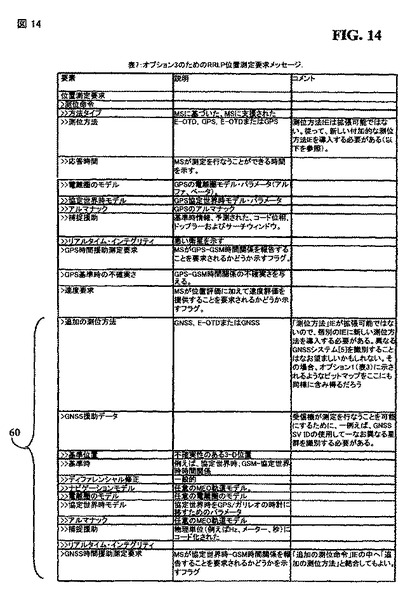
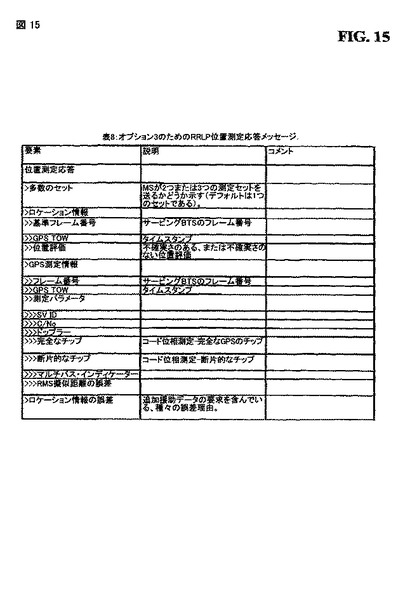
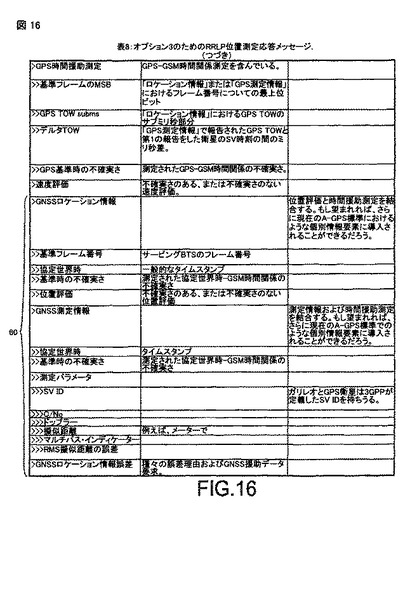
オプション3 − 任意のICDから独立した新しいロケーション方法「GNSS」
図14は、本発明の1つの態様により、オプション3に従って修正済のRRLP位置測定要求メッセージを表わす表7を示す。図15と16は、本発明の1つの態様により、オプション3に従ってRRLP位置測定応答メッセージを表わす表8を示す。
【0094】
オプション3は、オプション2(つまり、新しい測位方法「GNSS」が導入される)に類似している。しかし、アプローチは、星群データと同様に構造の点からも一般的にしておかれる。援助データ要素および測定結果は、任意のICDに特有にならない。
【0095】
衛星航法データそれ自体を使用する、あるいはA−GPS概念を再使用し、および拡張する代わりに、測位援助データが、A−GNSS対応のターミナル用に特別に生成される。例えば、ナビゲーション・モデルはGPSまたはガリレオのエフェメリス・パラメータと無関係にコード化されるだろう。そこでは中間地球軌道(MEO)衛星のための任意の軌道モデルは満足しているであろう。時刻は、GPSまたはガリレオの週の時刻(time of week)(TOW)から独立しており、例えば、協定世界時(UTC)などを使用することができるかもしれない。
【0096】
RRLPでは、オプション3は、オプション2に類似しているように見えるだろう。しかしながら、明確に個々の星群を識別する必要はない。GPS/ガリレオの受信機は、GPSおよびガリレオの特有の信号を測定することを可能にされる必要があるので、なおとにかく異なる星群を識別する必要がある。例は、表7および8において以下に概説される。すべての追加要素の詳細は新しく定義される必要があり、特定のICDに参考として載せられない。
【0097】
オプション3の利点は下記を含んでいる:
1.プロトコルの視点から見た一般的なアプローチ。移動局の受信機は、援助データを受信し、測定値を返す観点からGPSとガリレオの星群を単一のGNSSと見なすだろう。
【0098】
2.援助データ要素は特定のICDに依存しない。将来のシステムは、その仕様に対して要求される変更は最小限で、あるいは変更なしにサポートされるだろう。
【0099】
オプション3の課題は下記を含んでいる:
1.2つのブランチがRRLPに作成される。現在のA−GPSインプリメンテーションは、既存の情報要素を使用し続けるだろう。そして、将来のGPS−ガリレオ・インプリメンテーション(SMLCとMS)は既存のA−GPS情報要素および新しいGNSS情報要素の両方をサポートしなければならないだろう。ターミナルとSMLCがGNSS対応である場合、新しいGNSS情報要素だけが、A−GPSだけの場合にさえ使用され得る。しかしながら、ネットワーク中のSMLCが両方のプロトコル・ブランチ(例えば、GNSSがリリース7に加えられると仮定すれば、そのとき、SMLCがリリース7をサポートするまで、新しいリリース7対応のターミナルは、さらにリリース6もサポートせねばならない)をサポートするであろうことを保証することができないので、GNSS対応のターミナルは、なお既存のA−GPS情報要素をサポートしなければならないだろう。
【0100】
2.新しい共通の軌道モデルおよび新しい測地学の基準座標系は、このアプローチを本当に一般的にしておくために定義される必要があるかもしれない。既存のA−GPSユーザ・アルゴリズムをこれ以上使用することは可能ではないかもしれない。新しいGNSSプロトコルは、既存のA−GPSインプリメンテーションと互換性をもたないであろう。
【0101】
3.従来のものと支援されたGNSSインプリメンテーションは異なるだろう。従来のもの用と支援されたモード用との異なるユーザ・アルゴリズムは必要かもしれない。従来のモードは、支援されたモードの特別な場合としてこれ以上見られないかもしれない。
【0102】
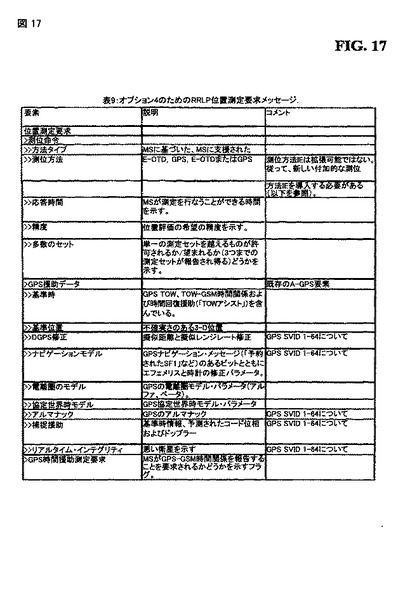
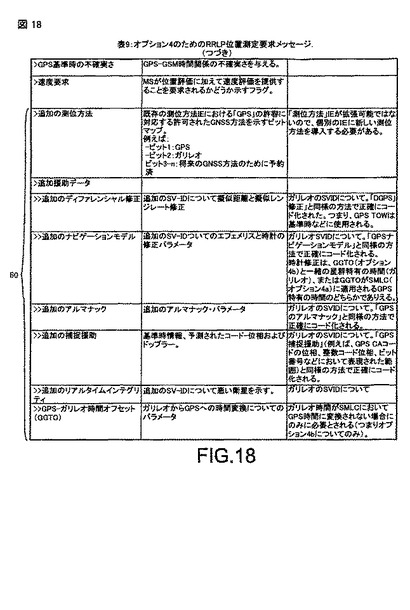
新しいオプション4 − 既存のGPSのユニットおよびフォーマットを使用する、ガリレオの追加
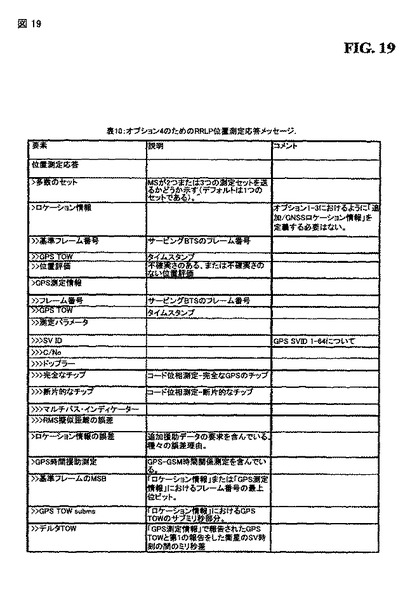
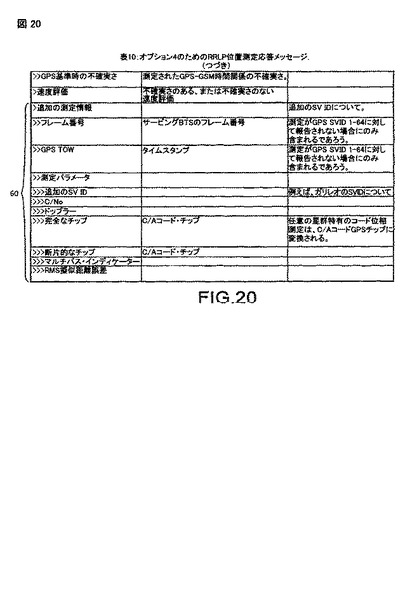
図17と18は、本発明の1つの態様により、オプション4に従ってRRLP位置測定要求メッセージを表わす表9を示す。図19と20は、本発明の1つの態様により、オプション4に従ってRRLP位置測定応答メッセージを表わす表10を示す。
【0103】
オプション2および3の課題のうちの1つは、RRLPにおける新しいプロトコル・ブランチの導入である。それは、A−GPSのサポートのための2つの異なるプロトコル・フォーマットがあるだろうということを意味する。したがって、ガリレオの導入は、さらにA−GPSだけの実装において結局インパクトを持っているかもしれない。他方では、オプション2および3は、一般的で、「全地球型衛星航法システム(GNSS)」の概念を導入するようになろうとする。オプション3は、それが特定のICDに依存しないという長所も持つ、そして、したがって、その仕様に要求される最小限の変更で、あるいは変更なしに、将来の衛星システムはサポートされるだろう。
【0104】
オプション4は、オプション1、2および3の利点を組み合わせ、オプション1、2および3に関連したほとんどの課題を回避する、代替アプローチについて記述する。
【0105】
オプション4では、ガリレオあるいは他のGNSSシステムが、既存のA−GPS情報要素を使用して加えられる。新しいガリレオ(あるいは他のGNSS)特有の情報要素(例えばオプション1および2)または新しいGNSS情報要素(例えばオプション3)のいずれかを定義する代わりに、既存のA−GPS情報要素は新しいガリレオの特有のSV−IDの導入によりさらにガリレオ衛星ビークル(SV)に使用される。既存のSV−ID 1−64は、GPSの衛星だけに使用される、そして追加のSV−ID、例えば65−128は、ガリレオのために取ってある。十分な追加のSV−IDは、容易に加えられる将来の人工衛星航法システムを可能にするように定義される。
【0106】
ガリレオおよび構想を描かれた将来の情報要素は、メーター、秒、ラジアン、Hzなどに変換することができる。それは、順番に、既存のGPSのユニットおよびフォーマットに、変換することができる。変換は、情報要素の送り手および受け手の両方に同じ様に適用されたよく定義された共通の仮定に基づく。既存のGPS情報要素・パラメータが、任意の同等な衛星システムもカバーするために適切な範囲を持つので、そのような変換は可能である。
【0107】
新しいガリレオSV−IDのための時間依存の援助データは、GPS時間(オプション4a)に変換することができるか、あるいは変換パラメータ、GPSからガリレオへの時間オフセット(GGTO)(オプション4b)と共に、ガリレオ時間を使用することができる。SMLC(オプション4a)あるいはMS(オプション4b)のいずれかは、共通のGPSの時間枠への変換を行なっている。任意のナビゲーション時間枠は、UTCに、および順番にGPS時間に、変換されることができるので、オプション3(例えばUTC)でのような第3の時間スケールを導入する必要はない。
【0108】
ASN.1の既存のSV−IDは拡張可能ではないので、新しい「追加のSV−ID」が定義され、IDを、例えば255(あるいは511あるいは1023)までカバーする必要がある、それは将来のGNSSあるいはオーグメンテーション・システムが加えられることを可能にする。SVに依存するすべての既存のGPS援助データは、64を越えるSV−IDに適用可能な「追加援助データ」IEに定義されている。「追加援助データ」IEの符号化は、厳密にGPSのための現在の援助データIEと同じである。従って、既存のプロトコルおよびインプリメンテーションへの影響は最小であるが、しかし、アプローチはまだ一般的である。
【0109】
オプション4をインプリメントするいくつかの可能性があり得る。表9および10に例示された例は、単に1つの可能性かもしれない。ある新しいASN.1コーディングは、RRLPセグメントの作成のために規則を指定することにより回避され得る。例えば、新しい星群IDパラメータ(あるいは恐らくSV IDインクリメント)は、星群固有データを含んでいるあらゆるRRLPコンポーネントに含まれることができる。それから、1つを超える星群用データは同じRRLPコンポーネントに含まれてないであろう。これは、任意の星群のための既存のGPS ASN.1パラメータの再使用を可能にし、新しいASN.1を定義しないようにするだろう。
【0110】
オプション4の利点は下記を含んでいている:
1.一般的なアプローチ、しかし既存のプロトコルおよびインプリメンテーションとなお互換性をもつ。ユーザ受信機は、GPSとガリレオの星群を単一のGNSS(援助データを受信し、測定を返す観点から)と見なすだろう。
【0111】
2.現在のプロトコルの発展。既存のA−GPS情報エレメントは、結合したGPS−ガリレオ受信機のためになお使用されるだろう。
【0112】
3.既存のプロトコルおよびA−GPS実装の上位互換性が維持されるだろう。既存のA−GPSインプリメンテーションは、ガリレオの導入によって影響されないであろう。
【0113】
代替インプリメンテーション
システム、エレメントおよび/または、ここに含まれるプロセスは、ハードウェア、ソフトウェアあるいは両方の組み合わせでインプリメントされ、1台以上のプロセッサ含んでいてもよい。プロセッサは、タスクを行なうための機械可読の命令のセットおよび/または装置である。プロセッサは、コンピュータ、マイクロプロセッサ、コントローラ、特定用途向けIC(ASIC)、有限ステート・マシン、ディジタル信号プロセサ(DSP)あるいは他のあるメカニズムを含み、これらに限定されずに、プロセスを具体化する一連の命令を実行することができる、任意の装置かもしれない。プロセッサは、ハードウェア、ファームウェアおよび/またはソフトウェアの任意の組み合わせも含んでいる。プロセッサは、実行可能なアプリケーションまたは手順、または情報装置によって、および/または出力装置へ情報を送出することによって、使用のための情報を、コンピューティングするか、操作するか、分析するか、修正するか、変換するか、または送信するかにより、格納され、および/または受け取られた情報について、動作する。
【0114】
実行可能なアプリケーションは、例えば、ユーザ・コマンドあるいはインプットに応答して、例えば、オペレーティング・システム、ソフトウェア・アプリケーション・プログラムあるいは他の情報処理システムのものを含む前もって定義した関数をインプリメントするための機械コードあるいは機械可読命令を含む。
【0115】
実行可能な手順は、コード(つまり機械可読命令)のセグメント、サブルーチン、コードの他の別個のセクション、または1つ以上の特定のプロセスを行なうための実行可能なアプリケーションの部分であり、受信される入力パラメータ(あるいは受信される入力パラメータに応じて)上でオペレーションを行ない、そして生じる出力パラメータを提供することを含み得る。
【0116】
様々な実施態様おいて、ハードワイヤードの回路類は、本発明をインプリメントするソフトウェア命令と結合して使用することができる。したがって、技術は、ハードウェア回路とソフトウェアの任意の特定の組み合わせに制限されないし、また、データ処理システムによって実行される命令の任意の個別の出所にも制限されない。さらに、この記述の全体にわたって、様々な関数およびオペレーションは、記述を単純化するため、ソフトウェア・コードによって実行されるか、もたらされると記述される。しかしながら、当業者は、そのような表現によって意味されることが、関数がプロセッサによるコードの実行に起因するということであることを認識するだろう。
【0117】
本発明の態様が少なくとも一部分においてはソフトウェアで具体化されてもよいことはこの記述から明白だろう。すなわち、技術は、機械可読媒体に含まれる命令のシーケンスを実行するそのプロセッサに応じて計算機装置または他のデータ処理システム中で実行され得る。
【0118】
機械可読媒体は、マシン(例えばコンピュータ、ネットワーク装置、携帯情報端末、コンピュータ、ツールを製造するデータ処理装置、1台以上の1セットのプロセッサなどを備えた任意の装置)によってアクセス可能な形式で情報を提供する(つまり、格納または送信する)あらゆるメカニズムを含んでいる。機械可読媒体は、データ処理システムによって実行されたとき、システムに本発明の様々な方法を行なわせるソフトウェアおよびデータを格納するために使用することができる。この実行可能なソフトウェアおよび/またはデータの部分は、種々の場所に格納され得る。例えば、機械可読媒体は、電気的か、光学的か、音響学的か、あるいは他の形式の伝播される信号(例えば搬送波、赤外線信号、ディジタル信号など)などと同様に記録可能な/非記録可能なメディア(例えば読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、ディスク記憶装置メディア、光記憶装置メディア、フラッシュメモリ装置、不揮発性メモリ、キャッシュ、遠隔ストレージ装置など)を含んでいる。先の詳説では、発明はその特有の典型的な実施例に関して記述された。種々の修正が、請求項において示されるごとくの発明のより広い趣旨および範囲から外れずに、それになされてもよいことは明白だろう。従って、明細書と図面は限定的な意味ではなく例示の意味で考えられるべきである。
【図面の簡単な説明】
【0119】
【図1】本発明の1つの態様に従って、全地球型衛星航法システム(global navigation satellite system)(GNSS)、携帯電話システムおよび移動局を含む通信システムのブロック図説明を示す。
【図2】本発明の1つの態様に従って、現在のRRLP仕様に関して、ラジオ・リソース・ロケーション・サービス・プロトコル(radio resource location services protocol)(RRLP)の位置測定要求メッセージおよびRRLP位置測定応答メッセージ、を修正するための4つのオプションを表わす表Aを示す。
【図3】本発明の1つの態様に従って、4つのオプションのうちの1つにより現在のRRLP位置測定要求メッセージおよび現在のRRLP位置測定応答メッセージを修正する方法を示す。
【図4】本発明の1つの態様に従って、現在のRRLP仕様のためのRRLP位置測定要求メッセージを表わす表1を示す。
【図5】本発明の1つの態様に従って、現在のRRLP仕様のためのRRLP位置測定応答メッセージを表わす表2を示す。
【図6】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定要求メッセージを表わす表3を示す。
【図7】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定要求メッセージを表わす表3(つづき)を示す。
【図8】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定応答メッセージを表わす表4を示す。
【図9】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定応答メッセージを表わす表4(つづき)を示す。
【図10】本発明の1つの態様に従って、オプション2により修正済のRRLP位置測定要求メッセージを表わす表5を示す。
【図11】本発明の1つの態様に従って、オプション2により修正済のRRLP位置測定要求メッセージを表わす表5(つづき)を示す。
【図12】本発明の1つの態様に従って、オプション2によるRRLP位置測定応答メッセージを表わす表6を示す。
【図13】本発明の1つの態様に従って、オプション2によるRRLP位置測定応答メッセージを表わす表6(つづき)を示す。
【図14】本発明の1つの態様に従って、オプション3により修正済のRRLP位置測定要求メッセージを表わす表7を示す。
【図15】本発明の1つの態様に従って、オプション3によるRRLP位置測定応答メッセージを表わす表8を示す。
【図16】本発明の1つの態様に従って、オプション3によるRRLP位置測定応答メッセージを表わす表8(つづき)を示す。
【図17】本発明の1つの態様に従って、オプション4よるRRLP位置測定要求メッセージを表わす表9を示す。
【図18】本発明の1つの態様に従って、オプション4よるRRLP位置測定要求メッセージを表わす表9(つづき)を示す。
【図19】本発明の1つの態様に従って、オプション4によるRRLP位置測定応答メッセージを表わす表10を示す。
【図20】本発明の1つの態様に従って、オプション4によるRRLP位置測定応答メッセージを表わす表10(つづき)を示す。
【技術分野】
【0001】
関連する出願への相互参照
本出願は、2006年1月10日に申請され、「GNSSの導入に対する様々なオプションの評価」というタイトルが付けられた米国の仮出願60/758,244番、および2006年3月15日に申請され、「仮想GNSS時間」という表題が付けられた米国の仮出願60/782,955の優先権を主張する。両者はこの譲受人に譲渡され、引用によってここに組込まれる。
【0002】
本発明の技術分野
本発明は、一般に通信システムに関する。特に、本発明は、全地球型衛星航法システム(global navigation satellite system)を含む通信システムに関する。
【背景技術】
【0003】
無線ネットワーク 様々なレベルの結果および正確さの無線ネットワーク中の移動局の位置を計算するのに使用される様々なタイプの技術がある。支援されたGPS(A−GPS)は、無線ネットワークにおける移動局の位置を決定するために現在使用される測位技術である。A−GPSサーバは、それが短い初期位置検出時間(Time to First Fix)(TTFF)を持ち、弱い信号の捕捉を許し、移動局バッテリーの使用を最適化するために、移動局に援助データを供給する。A−GPSは、ロケーション(location)技術として単独で使用されるか、あるいは距離のような測定値を提供する他の測位技術と混成される。
【0004】
A−GPSサーバは、移動局の近似の位置に特有の無線移動局にデータを供給する。援助データは、衛星に移動局が速くロックすることを支援し、ハンドセットが弱い信号を自動追跡することを潜在的に可能にする。その後、移動局は位置計算を行なうか、あるいは計算を行うためにサーバに測定されたコード位相を随意に返す。A−GPSサーバは、例えば可視状態のGPSの衛星が十分にない場合など、それがそうでなければ可能でないかもしれない位置を計算するために携帯電話の基地局から移動局へ往復のタイミング測定のような追加情報を利用することができる。
【0005】
衛星を利用した全地球型測位システム(global positioning system)(GPS)の中における進歩、タイミング・アドバンス(TA)、および地球上を基礎とする増強された観測時間差(enhanced observed time difference)(E−OTD)位置決定技術は、移動局加入者の地理的位置(例えば緯度と経度)の正確な決定を可能にする。地理的なロケーション・サービスが、無線通信ネットワーク内に展開するとともに、そのような位置情報はネットワーク要素に格納され、搬送メッセージを使用して、ネットワーク中のノードに配送され得る。そのような情報は、SMLC(サービング移動体ロケーション・センター(Serving Mobile Location Center))、SAS(スタンド・アロンのSMLC)、PDE(位置を決定するエンテティ(Position Determining Entities))、SLP(安全なユーザプレーン・ロケーション・ロケーション・プラットフォーム(Secure User Plane Location Location Platforms))および特殊目的の移動体加入者位置データベースに格納され得る。
【0006】
特殊目的の移動体加入者位置データベースの1つの例は、第3世代の協力プロジェクト(3GPP)によって提案されたSMLCである。特に、3GPPは、SMLC間の移動体加入者位置情報の通信のために搬送プロトコルを定義した。この搬送プロトコルは、ラジオ・リソースLCS(ロケーション・サービス)プロトコルと呼ばれ、RRLPを意味し、移動体加入者の位置と関係する移動局とSMLCの間で通信された搬送メッセージを定義する。RRLPプロトコルの詳細な説明は、3GPP TS 44.031 v7.2.0(2005−11)第3世代の協力プロジェクト;技術仕様書グループGSM端ラジオ・アクセス・ネットワーク;位置サービス(LC);移動局(MS) − サービング移動体ロケーション・センター(SMLC)ラジオ・リソースLCSプロトコル(RRLP)(リリース7)、で見つかる。
【0007】
アメリカの全地球型測位システム(GPS)に加えて、ロシアのGLONASSシステム、あるいは提案されたヨーロッパのガリレオ・システムのような他の衛星測位システム(Satellite Positioning System)(SPS)も、移動局の位置ロケーション(position location)のために使用され得る。しかしながら、システムの各々は異なった仕様によって作動する。
【0008】
従って、位置ロケーションに関してさらに効率と利点を供給するために、単に1つの衛星システムではなく2つ以上の衛星システムから送られた衛星信号に基づいて移動局のための位置ロケーションを決定することができる、全地球型衛星航法システム(global navigation satellite system)(GNSS)を含む通信システムの必要がある。
【発明の開示】
【発明の概要】
【0009】
本発明は方法、装置および/またはシステムを含んでいる。その装置は、データ処理システム(それらは方法を行なう)、および、データ処理システム上で実行された時、データ処理システムに方法を行なわせる実行可能なアプリケーションを格納するコンピュータ可読媒体を含み得る。
【0010】
本発明の1つの態様によれば、第1のおよび第2の全地球型衛星航法システム(GNSS)は、第1および第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)を含んでいる。第1および第2の複数のSVの各々は、第1のおよび第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるように適合されている。プロセッサは、第1の複数のユニークな対応するIDに応答して第1の複数のSVから送信される、第1の複数の通信信号を受信し、識別するように適合されている。プロセッサは、第2の複数のユニークな対応するIDに応答して第2の複数のSVから送信される、第2の複数の通信信号を受信し、識別するように適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号を受信し、かつ識別することに応じて位置ロケーション情報を決定するように適合されている。
【0011】
本発明の他の態様によれば、本発明は、装置、方法、コンピュータ可読メモリ、および信号のプロトコルを使用する。
【0012】
本発明のこれらおよび他の態様は、添付の図面、および以下の詳細な説明から明らかになる。
【0013】
本発明の態様は、参考番号のようなものが対応する要素を指定する添付の図面の図において、限定ではなく例として示される。
【詳細な説明】
【0014】
次の説明および図面は発明の例示であり、発明の限定として解釈されるべきでない。多数の特有の詳細は、本発明についての完全な理解を提供するために、説明される。しかしながら、ある事例では、良く知られた、あるいは従来の詳細は、本発明の説明を不明瞭にしないようにするために記述されない。1つの実施例の、あるいは現在の開示における実施例の参照は、必ずしも同じ実施例ではない。また、そのような参照は、1つ以上の実施例を含んでいる。
【0015】
通信システム10
図1は、本発明の1つの態様に従って、全地球型衛星航法システム(GNSS)11、携帯電話システム12、地上通信線電話システム13を含む通信システム10のブロック図表示を示す。GNSSシステム11は、第1のGNSSに関連した衛星14−17の第1の組、および第2のGNSSに関連した衛星18−21の第2の組を含む多数の全地球型の航行衛星14−21を含んでいる。第1と第2のGNSSは、任意の異なる2つのGNSS(例えば米国の全地球型測位システム(GPS)、またはロシアのGLONASSシステムのような他の衛星測位システム(SPS)、あるいは提案されたヨーロッパのガリレオ・システム)であり得る。
【0016】
携帯電話システム12は。多数の携帯電話基地局22−24(「基地局」)、移動通信交換局25、および、位置決定エンティティ(PDE)26とも呼ばれるロケーションサーバを含んでいる。PDE26は、3GPP SMLCまたは3GPP SASであり得る。各基地局22−24は、それぞれさらに、基地局(BS)送信機27、BS受信機28、GPSの受信機29、第1のGNSS受信機(例えばGPSの受信機)29、および第2のGNSS受信機(例えばガリレオの受信機)30を含んでいる。第1と第2のGNSS受信機は、基地局22−24の内部、あるいは外部に位置してもよい。GPSの受信機29は、GPSの衛星14−17から信号を受信する。ガリレオの受信機35は、ガリレオ衛星18−21から信号を受信する。
【0017】
通信システム10は、移動局31のために無線通信を提供するものであり、そして携帯電話、固定した無線、PCS、あるいは衛星通信システムに制限されていない。通信システム10は、例えばCDMA、TDMA、FDMAあるいはGSM、あるいはそれらの組み合わせのような、任意の標準あるいはプロトコルに従って、多元接続通信を提供することができる。
【0018】
全地球型衛星航法システム(GNSS)11
GNSSシステム11は、その各々が地球表面の上の予測可能な軌道を移動する、GPS衛星14−17およびガリレオ衛星18−21のような衛星の集合体である。各衛星は、それぞれ、その衛星に特有の擬似雑音(PN)コードで変調された信号を送信する。PNコードはそれぞれ、所定の数のチップを含む。例えば、GPSにとって、PNコードは、毎ミリ秒繰り返される、1,023のチップのシーケンスである。GPSの受信機24のようなGPSの受信機は、GPSの受信機に見える衛星の各々からの信号の混合物を含むコンポジット信号を受信する。受信機の中の信号検出器は、その衛星のためのPNコードの受信信号とシフトされたバージョンの間の相関の程度の決定により、特定の衛星からの伝送を検知する。シフトオフセットのうちの1つのための相関値中の十分な質のピークが検知される場合、GPSの受信機はその衛星からの伝送を検知したと考えられる。
【0019】
無線セルラー・ネットワーク(例えば携帯電話システム12)における移動局31についての位置ロケーションを行なうために、例えば、距離(range)、擬似距離(pseudorange)、往復行程遅れ(round trip delay)、および明確な基準点(例えば、GPS衛星、擬似衛星(pseudolite)、基地局、地球の表面)に関係付けられる他のもののような多くの幾何学的にはっきりした測定を使用して、位置計算を行なうことなど、いくつかのアプローチがある。
【0020】
1つのアプローチ、いわゆるアドバンスト・フォーワード・リンク三辺測量(Advanced Forward Link Trilateration)(AFLT)または増強した観測時間差(Enhanced Observed Time Difference)(E−OTD)は、移動局31において、各々のいくつかの基地局から送信される信号(例えば、基地局22−24からの伝送)の到着時間を測定する。これらの時間は、位置決定エンティティ(PDE)(例えばロケーションサーバ)26に送信され、それは、受信についてこれらの時間を使用して、移動局31の位置を計算する。これらの基地局での送信時刻は、時間の特別の段階において、多数の基地局22-24に関連した1日の時刻(times-of-day)が、特定の誤差境界内にあるように調整される。基地局22−24の正確な位置および受信の時刻は、移動局31の位置の決定に使用される。
【0021】
AFLTシステムでは、基地局22−24からの信号の受信の時刻は、移動局31で測定される。その後、このタイミング・データは移動局31の位置を計算するために使用され得る。移動局31によって得られたタイミング情報が通信リンクによってロケーションサーバ26に送信される場合、そのような計算は、移動局31、あるいはロケーションサーバ26で行われ得る。典型的には、受信の時刻は、携帯電話の基地局22−24のうちの1つを通ってロケーションサーバ26に伝えられる。ロケーションサーバ26は、基地局から移動通信交換局25を通ってデータを受け取るために連結される。ロケーションサーバ26は、基地局アルマナック(base station almanac)(BSA)サーバを含んでいてもよい。それは、基地局の位置および/または基地局のカバーエリアを提供する。あるいは、ロケーションサーバ26およびBSAサーバは互いと離れているかもしれない。また、位置決定のために基地局のアルマナックを得るために、ロケーションサーバ26は基地局と通信する。移動通信交換局25は、信号が移動局31から他の電話(例えばPSTS上の地上通信線電話あるいは他の携帯電話)への間で伝えられるように、信号(例えば音声、データおよび/またはビデオ通信)を、地上通信線公衆電話交換システム(PSTS)13との間で供給する。ある場合には、ロケーションサーバ26が、さらに携帯電話のリンクによって移動通信交換局25と通信してもよい。ロケーションサーバ26は、さらにこれらの放射の相対的なタイミングを決定するために基地局22−24のいくつかのものからの放射をモニターしてもよい。
【0022】
到着の時間差(Time Difference of Arrival)(TDOA)と呼ばれる別のアプローチでは、移動局31からの信号の受信の時刻は、いくつかの基地局22−24で測定される。このタイミング・データは、それから、移動局31の位置を計算するために、ロケーションサーバ26に伝えられてもよい。
【0023】
さらに、位置ロケーションを行う3番目のアプローチは、アメリカの全地球型測位システム(GPS)あるいは、ロシアのGLONASSシステムまたは提案されたヨーロッパのガリレオ・システムのような他の衛星測位システム(SPS)のための受信機の移動局31における使用を含んでいる。GLONASSシステムは、異なる擬似乱数的なコードを利用するのではなく、わずかに異なるキャリア周波数を利用することにより、異なる衛星からの放射が互いを区別される点でGPSのシステムと主として異なる。
【0024】
この状況において、そしてガリレオ・システムで、本質的に、以前に記述された回路類およびアルゴリズムはすべて適用可能である。ここに使用される用語「GNSS」は、ロシアのGLONASSシステムおよび提案されたヨーロッパのガリレオ・システムを含むそのような代替の衛星測位システムを含んでいる。
【0025】
3番目のアプローチにおいて、GPSの受信機34は、衛星14−17のうちのいくつかからの伝送の検知によりその位置を評価する。各検知された伝送については、送信の時刻と到着時刻の間で遅れ(チップまたはチップの分数の期間で)を評価するために、受信機は、PNコードのシフトを使用する。測位信号の既知の伝播速度を与えられて、GPSの受信機は、それ自体と衛星の間の距離を推定する。この推定された距離は、衛星のまわりの球体を定義する。GPSの受信機34は、衛星の各々の正確な軌道および位置を知っており、これらの軌道と位置の最新版を連続的に受け取る。この情報から、GPSの受信機34は、4つの衛星についての球体が交差するポイントからその位置(かつ現在の時刻)を決定することができる。GPSの受信機34と結合して、あるいは、その代わりの選択肢として、ガリレオの受信機35は、衛星18−21の少なくとも4つからの伝送の検知により、その位置を評価し得る。
【0026】
本発明の方法および装置はGPSの衛星に関して記説明されたけれども、その説明が擬似衛星あるいは衛星と擬似衛星の組み合わせを利用する測位システムに等しく適用可能であることは、評価されるだろう。擬似衛星は、地上の送信機であり、それは一般にGPS時間と同期しているL周波帯キャリア信号上で変調された(GPSの信号と同様の)PNコードを放送する。送信機は、それぞれ、遠隔の受信機によって識別を許すためにユニークなPNコードを割り当てられ得る。擬似衛星は、トンネル、鉱山、建物、あるいは他の囲まれたエリアのように、周回軌道衛星からのGPSの信号が利用不可能かもしれない状況において有用である。用語「衛星」は、ここに使用されるように、擬似衛星、あるいは擬似衛星の等価物を含むことが意図される。また、用語、GPSの信号は、ここに使用されるように、擬似衛星あるいは擬似衛星の等価物からのGPSのような信号を含むことが意図される。
【0027】
衛星測位信号(SPS)信号に受信機を利用するような方法は、完全に自律かもしれないし、あるいは援助データを提供するかあるいは位置計算を共有するために携帯電話ネットワークを利用してもよい。簡略表記として、これらの様々な方法は「GPS」と呼ばれる。そのような方法の例は米国特許5,945,944;5,874,914;6,208,290;5,812,087;および5,841,396に記述される。
【0028】
例えば、米国特許5,945,944は、携帯電話伝送信号から正確な時間情報を得る方法について記述する。それは、受信機の位置を決定するGPSの信号と結合して使用される。米国特許5,874,914は、受信機の位置を決定するために、通信リンクによって受信機に視界衛星におけるドップラー周波数シフトを送信する方法について記述する。米国特許5,874,914は、さらに受信機がその位置を決定するのを助ける通信リンクを通して、受信機に衛星アルマナックデータ(あるいはエフェメリス(ephemeris)・データ)を送信する方法について記述する。米国特許5,874,914は、さらにGPS信号獲得のために受信機で参照信号を提供する携帯電話システムの高精度の搬送周波数信号にロックする方法について記述する。米国特許6,208,290は、SPS信号処理時間の短縮のために近似のドップラーを決定するために受信機の近似の位置を使用する方法について記述する。米国特許5,812,087は、受信機の位置を決定するためにレコードのうちの1つが受信機で受信される時を決定するために、異なるエンティティで受信された衛星データメッセージの異なるレコードを比較する方法について記述する。
【0029】
実際的な廉価な実装では、MSの受信機33と、GPSの受信機34および/またはガリレオの受信機35の両方は、同じ筐体へまとめられ、そして、受信機回路類および/またはアンテナのような共通の電子回路類は事実上共有することができる。
【0030】
さらに上記の方法とは別の変形では、往復行程遅れ(round trip delay)(RTD)は、基地局22、23、あるいは24から移動局31へ送られ、次に対応する基地局22、23、あるいは24に返される信号について見出される。類似しているが代替方法では、往復行程遅れは、移動局31から基地局へ送られ、次に移動局31に返される信号について見出される。一方向の時間遅れの評価を決定するために、往復行程の遅れは、各々2で割られる。基地局の位置についての知識と一方向の遅れを加えると、移動局31の位置を地球上の1つの円に制約する。その後、別個の基地局からのそのような2つの測定が2つの円の交差に帰着する。それは、次には地球上で2点まで位置を制約する。3番目の測定(さらに到来角またはセルのセクター)は、曖昧さを解決する。
【0031】
GPSシステムを備えた、AFLTあるいはTDOAのような別の測位方法の組み合わせは、「ハイブリッド」システムと呼ばれる。例えば、米国特許5,999,124は、ハイブリッドシステムについて記述する、その中でセルベースのトランシーバの位置は、少なくとも以下の組み合わせから決定される: i) セルベースのトランシーバと通信システムの間のセルベースの通信信号におけるメッセージの行程の時間に相当する時間測定、および ii)SPS信号の行程の時間に相当する時間測定。
【0032】
高度援助は、移動装置の位置を決定する様々な方法の中で使用されている。高度援助は、典型的に高度の擬似測定に基づいている。移動局31の位置の高度についての知識は、その中心が地球の中心にある球体(あるいは楕円体)の表面に移動局31の可能な位置を制約する。この知識は、移動局31の位置を決定するのに必要な独立した測定の数を減らすために使用され得る。例えば、米国特許6,061,018は、評価された高度がセルのオブジェクトの情報から決定される場合の方法について記述する。それは、移動局31と通信するセル・サイト送信機を持っているセル・サイトかもしれない。
【0033】
測定の最小のセットが利用可能な場合、ナビゲーション方程式のユニークな解は、移動局31の位置ついて決定される。1つを超える余分な測定が利用可能な場合、「最良」の解は、すべての利用可能な測定に最良適合するように得られるかもしれない(例えばナビゲーション方程式の残余のベクトルを最小化する最小2乗解手順を通じて)。
【0034】
余分の測定がある場合、残余のベクトルが典型的に0でないので、測定における雑音か誤差により、インテグリティ(integrity)・モニタリング・アルゴリズムは測定がすべて互いと一致しているかどうか判断するために使用することができる。
【0035】
例えば、従来の受信機の自律的インテグリティ・モニタリング(Receiver Autonomous Integrity Monitoring)(RAIM)アルゴリズムは一貫性の問題が余分の測定のセットにあるかどうか検知するために使用され得る。例えば、あるRAIMアルゴリズムが、ナビゲーション方程式のための残余のベクトルの大きさが閾値未満かどうか判断する。残余のベクトルの大きさが閾値より小さい場合、測定は一貫していると考えられる。残余のベクトルの大きさが閾値より大きい場合、インテグリティの問題がある、その場合には余分の測定の1つは、それは最多の矛盾を引き起こすように見える、その後、改善された解を得るために削除されてもよい。
【0036】
携帯電話システム12
多数の携帯電話基地局22−24は、典型的に無線通信で地理的な区域を覆うように整えられる。また、先行技術において良く知られているように、これらの異なる基地局22−24は少なくとも1つの移動通信交換局25につながれる。したがって、多数の基地局22−24は、地理的に分布されるだろうが、移動通信交換局25によって連結されるだろう。携帯電話システム12は、基準GPSの受信機29(それらはディファレンシャルGPS情報を提供する)のネットワークに接続され、移動局の位置の計算において使用するためのGPSのエフェメリス・データを提供し得る。携帯電話システム12は、基準ガリレオの受信機30(それらはディファレンシャル・ガリレオ情報を提供する)のネットワークに接続され、移動局の位置の計算において使用するためのガリレオのエフェメリス・データを提供し得る。携帯電話システム12は、モデムあるいは他のコミュニケーション・インタフェースによって、他のコンピュータあるいはネットワーク・コンポーネント、および/または、911通話に応答する公共の安全応答ポイントのような、緊急オペレーターによって操作されるコンピュータ・システムにつながれる。IS−95に準拠の符号分割多元接続システムでは、基地局またはセクター22−24は、それぞれパイロット信号を送信する。それは、繰り返す擬似ランダム信号(PN)コード(それはユニークにその基地局を識別する)で変調される。例えば、IS−95に準拠の符号分割多元接続システムについては、PNコードは32,768のチップのシーケンスであり、それは、26.67 ミリ秒毎に繰り返される。
【0037】
ロケーションサーバ26は、典型的にはモデムまたはネットワークインターフェイスのような通信装置を含んでいる。ロケーションサーバ26は、通信装置(例えばモデムあるいは他のネットワークインターフェイス)を通って多くの異なるネットワークにつながれてもよい。そのようなネットワークは、移動通信交換局25か多数の移動通信交換局、陸上の電話システム交換局、携帯電話基地局22−24、他のGPS信号受信機、他のガリレオの受信機あるいは他のプロセッサか、ロケーションサーバを含んでいる。ロケーションサーバ26を使用する方法の様々な例は、次のものを含む多数の米国特許に記述されている:米国特許5,841,396、5,874,914、5,812,087および6,215,442。
【0038】
ロケーションサーバ26(それはデータ処理システムの一形態である)は、バスを含んでおり、それはマイクロプロセッサおよびROMおよび揮発性のRAMおよび不揮発性メモリにつながれる(各々示されていない)。プロセッサはキャッシュ・メモリー(示されていない)につながれる。バスは、これらの様々なコンポーネントをともに相互に連結させる。ロケーションサーバ26は、不揮発性メモリを利用してもよく、それは、ネットワーク記憶装置(それはモデムまたはイーサネット(登録商標)のインターフェースのようなネットワークインターフェイスを通ってデータ処理システムにつながれる)のように携帯電話システム12から遠隔である。バスは、当該技術分野において周知なように、様々なブリッジ、コントローラおよび/またはアダプタによって互いに接続された1つ以上のバスを含んでいてもよい。多くの状況で、ロケーションサーバ26は、人間の援助なしでそのオペレーションを自動的に行なうことができる。人間の相互作用が必要であるいくつかの設計では、I/Oコントローラ(示されていない)は、ディスプレイ、キーボードおよび他のI/O装置と通信することができる。より少数のコンポーネントあるいは恐らくより多くのコンポーネントがあるネットワーク・コンピューターおよび他のデータ処理システムが、本発明と共に使用されてもよく、ロケーションサーバあるいはPDEとして働いてもよいことはさらに認識されるだろう。
【0039】
移動局31
携帯電話の移動局31(「移動局」)は、第1のGNSS受信機(例えばGPSの受信機)34および第2のGNSS受信機(例えばガリレオの受信機)35、移動局(MS)送信機32、また移動局受信機33、を含んでいる。GPSの受信機34は、GPSの衛星14−17から信号を受信する。ガリレオの受信機35は、ガリレオの衛星18−21から信号を受信する。MSの送信機32は、BS受信機28に通信信号を送信する。MSの受信機33は、BS送信機27から通信信号を受信する。
【0040】
移動局31の他の構成要素(それらは図1に示されていない)は、例えば、GPSのアンテナ、ガリレオ・アンテナ、携帯電話アンテナ、プロセッサ、ユーザ・インターフェース、ポータブル電源およびメモリ素子を含んでいる。プロセッサは、さらにプロセッサー・ポートおよび他のモバイル機能を含んでいる。
【0041】
移動局31において、衛星信号の受信アンテナと衛星信号の受信機は、それぞれ、衛星信号の受信および処理に必要な機能を行なうために、捕捉およびトラッキング回路類(示されていない)のような回路類を含んでいる。衛星信号(例えば1つ以上の衛星14−17(および/または18−21)から送信された信号)は、衛星アンテナおよび捕捉およびトラッキング回路への入力によって受信される。それは種々の受信される衛星についてのPN(擬似乱数的な雑音)コードを取得する。回路(例えば相関インディケーター(示されてない))によって生成されたデータは、プロセッサによって単独であるいは受信した他のデータと結合して処理される、あるいは、位置ロケーション・データ(例えば緯度、経度、時間、衛星など)を生成するために携帯電話システム12によって処理される。
【0042】
携帯電話のアンテナおよび携帯電話の送受信機(例えばMSの送信機32およびMSの受信機33)は、通信リンクによって送信され、および受信される通信信号の処理に必要な機能を行なうための回路類を含んでいる。通信リンクは、典型的には、通信アンテナ(示されていない)を有する1つ以上の基地局22−24のような別のコンポーネントへの無線周波数通信リンクである。
【0043】
セルラー送受信機は伝送/受信交換局(示されていない)を含んでいる。それは通信アンテナおよびセルラー送受信機間で通信信号(例えば無線周波数信号)を送る。いくつかの移動局では、帯域分割用のフィルタ(すなわち「デュプレクサ」)は、T/Rスイッチの代わりに使用される。受信通信信号は、携帯電話の送受信機における通信受信機へ入力され、そして処理用のプロセッサに渡される。プロセッサから送信される通信信号は、各々送受信機内にある変調器および周波数変換装置(示されていない)に伝えられる。携帯電話の送受信機中のパワーアンプ(示されない)は、信号の利得を1つ以上の基地局22−24への伝送のための適切なレベルに増加させる。
【0044】
移動局31の1つの実施形態では、GPSの受信機24および/またはガリレオの受信機35の捕捉およびトラッキング回路類によって生成されたデータは、1つ以上の基地局22−24へ通信リンク(例えばセルのチャネル)を通して送信される。その後、ロケーションサーバ26は、1つ以上の衛星受信機34および35からのデータ、そのデータが測定された時刻、および、基地局自身の衛星受信機あるいはそのようなデータの他のソースから受け取られたエフェメリス・データ、に基づいて移動局31の位置を決定する。その後、位置ロケーションデータは移動局31へ、あるいは他のリモート位置へ送信され得る。通信リンクを利用するポータブル受信機に関するより多くの詳細が、一般に割り当てられた米国特許5,874,914番に開示されている。
【0045】
移動局31は、ユーザ・インターフェース(示されていない)を含んでいてもよい。それはさらにデータ入力装置およびデータ出力装置(いずれも示されていない)を提供し得る。
【0046】
データ入力装置は、典型的には、ユーザから手動で、あるいは別の電子装置から自動的に、入力データを受け取ることに応じて、プロセッサデータを供給する。手動入力については、データ入力装置は、例えば、キーボードとマウスであるだけでなく、タッチ・スクリーン、あるいはマイクロホンおよび音声認識アプリケーションかもしれない。
【0047】
データ出力装置は、ユーザまたは別の電子装置による使用について典型的にはプロセッサからのデータを提供する。ユーザへの出力については、データ出力装置は、例えば、プロセッサからのディスプレイ信号を受け取ることに応じて1つ以上のディスプレイ・イメージを生成するディスプレイであるが、それだけでなくスピーカーまたはプリンタかもしれない。ディスプレイ・イメージの例は、例えば、テキスト、グラフィックス、ビデオ、写真、イメージ、グラフ、図表、フォームなどを含んでいる。
【0048】
移動局31は、例えば、さらにコンピュータ・メモリー装置あるいは、他の実体的な、あるいはコンピュータ可読の記憶媒体のような、任意のタイプのデータストレージ装置を意味するメモリ装置(示されていない)を含んでいてもよい。メモリ装置は、1つ以上の場所に配置され、かつ移動局の特別の実装に依存して、1つ以上の技術として実装された、1つ以上のメモリ装置を表わす。さらに、メモリ装置は、プロセッサよって可読で、データ、および/またはプロセスを具体化する一連の命令を格納することができる任意の装置かもしれない。メモリ素子の例は、RAM、ROM、EPROM、EEPROM、PROM、ディスク(ハードあるいはフロッピー(登録商標))、CD−ROM、DVD、フラッシュメモリなど、を含んでいる 、しかしこれらに制限されない。
【0049】
移動局31は、移動局31のオペレーションを制御するプロセッサ(示されていない)を含んでいてもよい。プロセッサおける他の移動体の機能は、まだここに記述されていない、移動局31の任意のあるいはすべての他の機能を表わす。そのような他の移動体の機能は、例えば、移動局が電話をし、データを通信することを可能にするために移動局31を操作することを含んでいる。
【0050】
移動局31は、ポータブル電源(示されていない)を含むことができる。それは移動局31の電気的な要素のためにポータブルな電気的なエネルギーを格納し提供する。ポータブル電源の例は、バッテリーと燃料電池を含んでいる、しかしこれらに制限されない。ポータブル電源は、再充電可能かもしれない、あるいはそうではないかもしれない。ポータブル電源は典型的には制限のある量の格納された電気的なエネルギーを持っており、移動局が作動し続けることができるように、ある量の使用の後に交換されるか、更新される必要がある。
【0051】
移動局31は、固定の(つまり、静止している)および/またはモバイル(つまりポータブル)かもしれない。移動局31は、下記の1つ以上を含んでいる様々な形式でインプリメントされてもよいが、これらに制限されなくてもよい。パソコン(PC)、デスクトップ・コンピュータ、ラップトップ・コンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパー・コンピュータ、ネットワークベースの装置、データ処理装置、携帯情報端末(PDA)、スマート・カード、携帯電話、ページャー、および腕時計。
【0052】
位置ロケーション・アプリケーション
位置ロケーション・アプリケーションの例は、陸、海および空の上の無限に様々なアプリケーションを含んでいている。科学界は、GPSをその正確タイミング能力および位置情報データについて利用する。測量技師は、GPSを仕事の増加する部分に利用する。位置ロケーションのレクリエーションの用途は、利用可能なレクリエーションのスポーツの数とほとんど同じくらい変えられる。位置ロケーションは、単に少数の名前をあげると、ハイカー、ハンター、マウンテンバイク乗りおよびクロスカントリー・スキーヤーに普及している。彼または彼女がどこにいるかを追跡する必要がある人、指定された位置への彼または彼女の道を見つける必要がある人、あるいは、彼または彼女がどんな方向に、かつどれくらい速く進んでいるかを知る必要がある人なら誰でも、全地球型測位システムの利点を利用することができる。位置ロケーションは、今や、乗り物においても同様にありふれている。いくつかの基本システムは、適所にあり、ボタンの押下(例えば急派センターにあなたの現在位置を送信することにより)で緊急路傍援助を提供する。より精巧なシステムは、さらに、乗り物の位置を街路図上に示す。現在、これらのシステムは、ドライバが彼または彼女がどこにいるか追跡し、指定の位置に到着することをフォローアップするように最良のルートを示唆することを可能にする。
【0053】
位置ロケーションは、緊急時に携帯電話の位置を決定するのに、および位置ベースのサービスに役立つ。米国における携帯電話の位置ロケーションの配備は、連邦通信委員会(FCC)の増強された9−1−1のマンデート(mandate)の結果である。そのマンデートは、ネットワークベースの解決策について、67パーセントの呼について100メートルの精度、95パーセントの呼について300メーターの精度を要求し、送受信機ベースの解決策について、67パーセントの呼について50メーター、95パーセント呼について150メーターを要求する。緊急電話が開始される場合、救急サービス調整センター―公共の安全回答ポイント(Public Safety Answering Point)(PSAP)は、MLCの中で計算される位置を利用するだろう。ヨーロッパとアジアでは、展開は、位置ベースのサービス(LBS)によって推進されている、しかしながら、携帯電話の位置の救急サービスについての要求は、これらの地域で確立されているか、確立されつつある。
【0054】
全地球型衛星航法システム(GNSS)
支援された(Assisted)―GNSS(A−GNSS)、そのほかに「発展した(expanded)」あるいは、「拡張した(extended)」GNSS(e−GNSS)と呼ばれる、は、GPSに加えて他の人工衛星航法システムまで概念を拡張する。例えば、全て各システムのための異なる基準に基づいた様々な信号を送信しながら、10年の範囲内で惑星の周囲を回っている、GPS、GLONASS、ガリレオ、および他の衛星を含めた80個のGNSS衛星があり得る。これは、受信機(例えば、モバイルか固定のいずれか)に、さらに多くの衛星およびそれらの送信する信号に対するアクセスを与えるだろう、それは、位置ロケーション決定の精度および効率の両方を改善することができる。より多くの衛星は、位置精度が衛星のジオメトリにはより敏感ではなくなることを意味し、そして、位置計算を行う場合により大きな冗長度を提供する。
【0055】
単純化されたGNSSアーキテクチャーは、図1に示される。携帯電話システム12、あるいは他のタイプの広域基準ネットワーク(WARN)は、無線ネットワークのカバーエリアに地理的に配置されるGNSS受信機のネットワークである。携帯電話システム12は、GNSS衛星から放送ナビゲーション・メッセージを集めて、キャッシングのためにA−GNSSサーバ(例えばPDE26)にそれを供給する。移動局31が緊急呼び出しを行う、すなわち、位置を必要とするサービスが起動され、そしてメッセージがA−GNSSサーバへ送られる。そのPDE26は、要求されたGNSS支援データを、1つ以上の基地局22−24の位置を近似の位置として使用して計算し、そして、移動局31にそれを供給する。
【0056】
標準
A−GPSサーバの異なるコンポーネントは、3GPP TS 23.271、TS 43.059およびTS 25.305の中で定義されている。サービング移動体ロケーション・センター(Serving Mobile Location Center)(SMLC)は、無線ネットワークの一部として展開され、そして、その目的は、ネットワーク内の送受話器の位置を決定することである。
【0057】
SMLCはGSM/GPRSネットワーク中で走り、ユーザ航空機ソリューションを備えた異なるワイヤレス・アクセス・タイプをサポートする場合、UMTSネットワークあるいはSUPL位置プラットフォーム(SLP)中でスタンド・アロンのSMLC(SAS)として知られている。SMLCは、送受話器ベースおよび送受信機支援のバージョンにおけるA−GPSを含む、送受話器ベースおよびネットワークベースの無線位置ロケーション方法をすべてサポートすることができる。
送受話器を使用するA−GPSの通信ためのプロトコルをサポートしている、いくつかの相違した仕様(つまり標準)がある。GSMネットワークは、RRLP仕様を使用する。UMTSネットワークは、ラジオ資源管理(RRC)仕様を使用する。符号分割多元接続ネットワークは、TIA IS−801および3GPP2 C.S0022仕様を使用する。これらの仕様の各々は、同じ基本的な情報を符号化する異なる方法を指定するが、使用された無線通信技術に特有である。現在の説明は、RRLP仕様の修正についての例(つまりオプション)について記述するけれども、RRC仕様、IS−801およびC.S0022仕様、または他の仕様は、同じまたは同様の結果を達成するために修正されてもよい。
【0058】
RRLP仕様は、位置測定要求メッセージ36(図1)(それは移動局31に測位指示および恐らく援助データを提供する)および位置測定応答メッセージ37(図1)(それは移動局31の位置評価あるいは移動局31から携帯電話システム12までの擬似距離測定値を供給する)を含んでいる。RRC仕様、IS−801/C.S0022仕様または他の仕様は、同じか、または同様の効果を達成する要求および/または応答メッセージを含んでいてもよい。
【0059】
RRLP位置測定メッセージを修正するための4つのオプション
図2は、本発明の1つの態様による、RRLP仕様用のRRLP位置測定要求メッセージ36(図1を参照)およびRRLP位置測定応答メッセージ37(図1を参照)の修正に対する4つのオプションを表わす表Aを例示する。表Aの中で、RRLP位置測定要求メッセージ36およびRRLP位置測定応答メッセージ37は、表1および2中の現在のRRLP仕様の中でそれぞれ表わされる。オプション1は、表3および4中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション2は、表5および6中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション3は、表7および8中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。オプション4は、表9および10中の修正済のRRLP位置測定要求メッセージおよび修正済のRRLP位置測定応答メッセージをそれぞれ提供する。
【0060】
オプション1は、新しい衛星位置測定方法として、ガリレオ/GNSSを導入する。
【0061】
オプション2は、「GNSSロケーション方法」を導入する、また新しいGNSS情報エレメント中に様々な星群(GPS、ガリレオ、および可能性のある将来の衛星ナビゲーションか、オーグメンテーション・システム)の詳細をカプセル化する。
【0062】
オプション3は、特定の星群の任意のインタフェース・コントロール・ドキュメント(ICD)とは独立した「GNSS位置測定方法」を導入する。
【0063】
オプション4は、オプション1、2および3の各々を評価し、かつ比較した後、オプション2および3の利点の組み合わせを導入する。
【0064】
オプション1、2および3は、ガリレオ/GNSSがRRLP仕様にどのように加えることができたかについて記述されている。
【0065】
位置測定要求および応答メッセージを修正する方法
図3は、本発明の1つの態様による4つのオプションのうちの1つに従う現在のRRLP仕様用の、RRLP位置測定要求メッセージ36およびRRLP位置測定応答メッセージ37を修正する方法38を示す。ブロック50において、方法38は開始する。ブロック51において、方法38は、RRLP位置測定要求メッセージ36(例えば表1)を識別する。ブロック52において、方法38は、オプション1(例えば表3)、オプション2(例えば表5)、オプション3(例えば表7)またはオプション4(例えば表9)により、RRLP位置測定要求メッセージ36(例えば表1)を修正する。ブロック53では、方法38は、RRLP位置測定応答メッセージ37(例えば表2)を識別する。ブロック54では、方法38は、オプション1(例えば表4)、オプション2(例えば表6)、オプション3(例えば表8)、あるいはオプション4(例えば表10)により、RRLP位置測定応答メッセージ37(例えば表2)を修正する。
【0066】
表3、5、7および9の各々は、それぞれ、オプション1、2、3および4のための、修正済のRRLP位置測定要求メッセージを表わしており、また、第2のGNSSシステム(例えばガリレオ)をサポートするための新しい要素60に加えて、表1に示されている、現在のRRLP位置測定要求メッセージの要素も含んでいる。表4、6、8および10の各々は、それぞれ、オプション1、2、3および4のための修正済のRRLP位置測定応答メッセージを表わしており、また、GNSSシステム(例えばガリレオ)用の新しい要素60に加えて、表2に示されている現在のRRLP位置測定応答メッセージの要素も含んでいる。参照番号60は、一般に表3−10の各々において新しい要素を識別する。しかしながら、それらの表の各々において新しい要素は異なっているかもしれない。表3−10の各々において、これは必要条件ではないが、現在の要素は最初にリストされ、新しい要素が後続する。したがって、各々の表3、5、7および9の始まりは、表1の要素と同じであり、それを含んでおり、また、表4、6、8および10の各々の始まりは、表2の要素と同じであり、それを含んでいる。
【0067】
現在のRRLP位置測定要求および応答メッセージ
図4は、本発明の1つの態様による、現在のRRLP仕様の、RRLP位置測定要求メッセージ36を表わす表1を示す。図5は、本発明の1つの態様による、現在のRRLP仕様の、RRLP位置測定応答メッセージ37を表わす表2を示す。
【0068】
図4と5は、それぞれ、支援されたGPS(A−GPS)のためのRRLP仕様に現在、記述されているような、現在のRRLP位置測定要求および応答メッセージを示し、そしてRRLP仕様へガリレオを導入するための変更を示す。RRLP仕様(TS 44.031)は、主なGERAN仕様であり、それはガリレオ/GNSSをサポートするために修正される必要がある。RRLP仕様は、測位指示および援助データ要素の詳細を含んでいる。
【0069】
RRLP仕様は、位置測定要求メッセージ(それは移動局31に測位指示および恐らく援助データを提供する。)および位置測定応答メッセージ(それは移動局31から携帯電話システム12へ擬似距離測定値または移動局31の測定位置評価を供給する。)を含んでいている。
【0070】
ガリレオ/GNSSの導入に必要とされた変更は、表1および2の右端のカラムに要約される。右端のカラムのブランクの記入は、変更が必要ではないことを示す。右端のカラムで示される変更は、任意の特別のオプション(つまり、オプション1−4)に特有ではなく、どの既存のA−GPSパラメータが再使用されてもよいか、あるいは、交換され、拡張されるか、そうでなければ修正される必要があってもよいか示す。ある場合には、いくつかのパラメータ変更が終了することができる前に、ガリレオについてのより多くの情報が必要だろう(例えば最終仕様書)。
【0071】
表1および2の各々において、さらに表3〜10においても同様に、「>」記号の数は、ASN.1符号化のフィールドの階層的レベルを示す。
【0072】
オプション1 − 新しいロケーション方法「ガリレオ」
図6と7は、本発明の1つの態様により、オプション1に従って修正済のRRLP位置測定要求メッセージを表わす表3を示す。図8と9は、本発明の1つの態様により、オプション1に従って修正済のRRLP位置測定応答メッセージを表わす表4を示す。
【0073】
オプション1において、新しいガリレオの要素60は、表1(A−GPSに似ている)に示されるように、現在のRRLP仕様に加えられる。現在のA−GPSに特有の情報要素は、使用され続けられ、そして、新しいガリレオに特有の情報要素60が加えられる。
【0074】
RRLP仕様のための修正は、リリース7拡張コンテナーにおける新しい情報要素の導入であり、位置測定要求メッセージおよび位置測定応答メッセージについての表3および4に、それぞれ要約される。
【0075】
オプション1は、いくつかの方法でインプリメントされ得る、そして、表3および4は、一例を記述した。
【0076】
オプション1の利点は下記を含んでいる:
1.現在のRRLPプロトコルの素直な展開。
【0077】
既存のA−GPS情報要素は、結合したGPS−ガリレオ受信機のためにまだ使用されるだろう。A−GPSのみの受信機は既存のA−GPS情報要素を使用し続けるだろう。また、ガリレオのみの受信機は、新しい追加情報要素のみを、あるいは主として追加情報要素を使用するだろう。
【0078】
2.既存のプロトコルおよびA−GPS実装の上位互換は維持されている。
【0079】
既存のA−GPSの実装(SMLCとMS)は、ガリレオの導入によって影響されいであろう。
【0080】
3.従来の支援されたGNSSモードは、異なるユーザ・アルゴリズムを要求しないであろう。
【0081】
オプション1の課題は下記を含んでいる:
1.援助データの要素は、ICD特有である。従って、最終のガリレオのICDが利用可能となる前に、必要なガリレオ援助データの要素をすべて定義することは可能ではないかもしれない。
【0082】
2.一般的なアプローチはない。新しいGNSSシステムを加えなければならないごとに、その仕様はそれに応じて修正されなければならない。
【0083】
オプション2 − 新しいロケーション方法、「GNSS」
図10と11は、本発明の1つの態様により、オプション2に従って修正済のRRLP位置測定要求メッセージを表わす表5を示す。図12と13は、本発明の1つの態様により、オプション2に従ってRRLP位置測定応答メッセージを表わす表6を示す。
【0084】
オプション2において、新しいロケーション方法「GNSS」は導入され、そして、GPSおよび/またはガリレオ特有の情報要素はGNSS情報要素中でカプセル化される。
【0085】
RRLP仕様に必要な修正は、リリース7拡張コンテナーにおける新しい情報要素の導入であり、そして位置測定要求および位置測定応答メッセージ用の表5および6にそれぞれ要約される。
【0086】
オプション2はいくつかの方法で実装されてもよい。また、表5および6は一例について記述した。表5および6に示される例は、共通のASN.1符号化がGPSとガリレオにとって可能であると仮定する提案をフォローアップする。
【0087】
オプション2の利点は下記を含んでいている:
1.オプション2は、同じGNSSシグナリングを共有するGPSおよびガリレオと十分に互換性をもつならば、任意の新しいGNSSシステム用のRRLPにおけるそれほど付加的でないASN.1符号化に帰着できる。
【0088】
2.従来の支援されたGNSSモードは異なるユーザ・アルゴリズムを要求しなくてもよい。
【0089】
オプション2の課題は下記を含んでいる:
1.2つのブランチがRRLPに作成される。現在のA−GPSインプリメンテーションは、既存の情報要素を使用し続けるだろう、そして将来のGPS/ガリレオのインプリメンテーション(SMLCとMS)は、既存のA−GPS情報要素および新しいGNSS情報要素の両方をサポートしなければならないだろう。ターミナルとSMLCがGNSS対応である場合、新しいGNSS情報要素のみが、A−GPSのみの場合でさえ使用され得る。しかしながら、すべてのネットワークにおけるすべてのSMLCが両方のプロトコル・ブランチ(例えば、GNSSがリリース7に加えられると仮定すれば、そのとき、すべてのSMLCがリリース7をサポートするまで、新しいリリース7対応のターミナルは、さらにリリース6もサポートせねばならない)をサポートするであろうことを保証することができないので、GNSS対応のターミナルは、なお既存のA−GPS情報要素を同様にサポートしなければならないだろう。
【0090】
2.A−GPS関連情報要素は、既存のRRLPおよび新しいGNSSブランチに、2度定義されている。
【0091】
3.援助データ要素はICD特有である、しかし共通のASN.1符号化を伴う。共通のASN.1符号化は実現可能ではないかもしれない。
【0092】
これらの将来のシステムが、GPSおよびガリレオと十分に互換性をもたない場合、このオプションを使用する将来のナビゲーションあるいはオーグメンテーション・システムを加えることは、困難あるいは不可能かもしれない。その場合、異なるオプション(例えば、オプション1またはオプショ4)に戻ることが必要かもしれない。
【0093】
オプション3 − 任意のICDから独立した新しいロケーション方法「GNSS」
図14は、本発明の1つの態様により、オプション3に従って修正済のRRLP位置測定要求メッセージを表わす表7を示す。図15と16は、本発明の1つの態様により、オプション3に従ってRRLP位置測定応答メッセージを表わす表8を示す。
【0094】
オプション3は、オプション2(つまり、新しい測位方法「GNSS」が導入される)に類似している。しかし、アプローチは、星群データと同様に構造の点からも一般的にしておかれる。援助データ要素および測定結果は、任意のICDに特有にならない。
【0095】
衛星航法データそれ自体を使用する、あるいはA−GPS概念を再使用し、および拡張する代わりに、測位援助データが、A−GNSS対応のターミナル用に特別に生成される。例えば、ナビゲーション・モデルはGPSまたはガリレオのエフェメリス・パラメータと無関係にコード化されるだろう。そこでは中間地球軌道(MEO)衛星のための任意の軌道モデルは満足しているであろう。時刻は、GPSまたはガリレオの週の時刻(time of week)(TOW)から独立しており、例えば、協定世界時(UTC)などを使用することができるかもしれない。
【0096】
RRLPでは、オプション3は、オプション2に類似しているように見えるだろう。しかしながら、明確に個々の星群を識別する必要はない。GPS/ガリレオの受信機は、GPSおよびガリレオの特有の信号を測定することを可能にされる必要があるので、なおとにかく異なる星群を識別する必要がある。例は、表7および8において以下に概説される。すべての追加要素の詳細は新しく定義される必要があり、特定のICDに参考として載せられない。
【0097】
オプション3の利点は下記を含んでいる:
1.プロトコルの視点から見た一般的なアプローチ。移動局の受信機は、援助データを受信し、測定値を返す観点からGPSとガリレオの星群を単一のGNSSと見なすだろう。
【0098】
2.援助データ要素は特定のICDに依存しない。将来のシステムは、その仕様に対して要求される変更は最小限で、あるいは変更なしにサポートされるだろう。
【0099】
オプション3の課題は下記を含んでいる:
1.2つのブランチがRRLPに作成される。現在のA−GPSインプリメンテーションは、既存の情報要素を使用し続けるだろう。そして、将来のGPS−ガリレオ・インプリメンテーション(SMLCとMS)は既存のA−GPS情報要素および新しいGNSS情報要素の両方をサポートしなければならないだろう。ターミナルとSMLCがGNSS対応である場合、新しいGNSS情報要素だけが、A−GPSだけの場合にさえ使用され得る。しかしながら、ネットワーク中のSMLCが両方のプロトコル・ブランチ(例えば、GNSSがリリース7に加えられると仮定すれば、そのとき、SMLCがリリース7をサポートするまで、新しいリリース7対応のターミナルは、さらにリリース6もサポートせねばならない)をサポートするであろうことを保証することができないので、GNSS対応のターミナルは、なお既存のA−GPS情報要素をサポートしなければならないだろう。
【0100】
2.新しい共通の軌道モデルおよび新しい測地学の基準座標系は、このアプローチを本当に一般的にしておくために定義される必要があるかもしれない。既存のA−GPSユーザ・アルゴリズムをこれ以上使用することは可能ではないかもしれない。新しいGNSSプロトコルは、既存のA−GPSインプリメンテーションと互換性をもたないであろう。
【0101】
3.従来のものと支援されたGNSSインプリメンテーションは異なるだろう。従来のもの用と支援されたモード用との異なるユーザ・アルゴリズムは必要かもしれない。従来のモードは、支援されたモードの特別な場合としてこれ以上見られないかもしれない。
【0102】
新しいオプション4 − 既存のGPSのユニットおよびフォーマットを使用する、ガリレオの追加
図17と18は、本発明の1つの態様により、オプション4に従ってRRLP位置測定要求メッセージを表わす表9を示す。図19と20は、本発明の1つの態様により、オプション4に従ってRRLP位置測定応答メッセージを表わす表10を示す。
【0103】
オプション2および3の課題のうちの1つは、RRLPにおける新しいプロトコル・ブランチの導入である。それは、A−GPSのサポートのための2つの異なるプロトコル・フォーマットがあるだろうということを意味する。したがって、ガリレオの導入は、さらにA−GPSだけの実装において結局インパクトを持っているかもしれない。他方では、オプション2および3は、一般的で、「全地球型衛星航法システム(GNSS)」の概念を導入するようになろうとする。オプション3は、それが特定のICDに依存しないという長所も持つ、そして、したがって、その仕様に要求される最小限の変更で、あるいは変更なしに、将来の衛星システムはサポートされるだろう。
【0104】
オプション4は、オプション1、2および3の利点を組み合わせ、オプション1、2および3に関連したほとんどの課題を回避する、代替アプローチについて記述する。
【0105】
オプション4では、ガリレオあるいは他のGNSSシステムが、既存のA−GPS情報要素を使用して加えられる。新しいガリレオ(あるいは他のGNSS)特有の情報要素(例えばオプション1および2)または新しいGNSS情報要素(例えばオプション3)のいずれかを定義する代わりに、既存のA−GPS情報要素は新しいガリレオの特有のSV−IDの導入によりさらにガリレオ衛星ビークル(SV)に使用される。既存のSV−ID 1−64は、GPSの衛星だけに使用される、そして追加のSV−ID、例えば65−128は、ガリレオのために取ってある。十分な追加のSV−IDは、容易に加えられる将来の人工衛星航法システムを可能にするように定義される。
【0106】
ガリレオおよび構想を描かれた将来の情報要素は、メーター、秒、ラジアン、Hzなどに変換することができる。それは、順番に、既存のGPSのユニットおよびフォーマットに、変換することができる。変換は、情報要素の送り手および受け手の両方に同じ様に適用されたよく定義された共通の仮定に基づく。既存のGPS情報要素・パラメータが、任意の同等な衛星システムもカバーするために適切な範囲を持つので、そのような変換は可能である。
【0107】
新しいガリレオSV−IDのための時間依存の援助データは、GPS時間(オプション4a)に変換することができるか、あるいは変換パラメータ、GPSからガリレオへの時間オフセット(GGTO)(オプション4b)と共に、ガリレオ時間を使用することができる。SMLC(オプション4a)あるいはMS(オプション4b)のいずれかは、共通のGPSの時間枠への変換を行なっている。任意のナビゲーション時間枠は、UTCに、および順番にGPS時間に、変換されることができるので、オプション3(例えばUTC)でのような第3の時間スケールを導入する必要はない。
【0108】
ASN.1の既存のSV−IDは拡張可能ではないので、新しい「追加のSV−ID」が定義され、IDを、例えば255(あるいは511あるいは1023)までカバーする必要がある、それは将来のGNSSあるいはオーグメンテーション・システムが加えられることを可能にする。SVに依存するすべての既存のGPS援助データは、64を越えるSV−IDに適用可能な「追加援助データ」IEに定義されている。「追加援助データ」IEの符号化は、厳密にGPSのための現在の援助データIEと同じである。従って、既存のプロトコルおよびインプリメンテーションへの影響は最小であるが、しかし、アプローチはまだ一般的である。
【0109】
オプション4をインプリメントするいくつかの可能性があり得る。表9および10に例示された例は、単に1つの可能性かもしれない。ある新しいASN.1コーディングは、RRLPセグメントの作成のために規則を指定することにより回避され得る。例えば、新しい星群IDパラメータ(あるいは恐らくSV IDインクリメント)は、星群固有データを含んでいるあらゆるRRLPコンポーネントに含まれることができる。それから、1つを超える星群用データは同じRRLPコンポーネントに含まれてないであろう。これは、任意の星群のための既存のGPS ASN.1パラメータの再使用を可能にし、新しいASN.1を定義しないようにするだろう。
【0110】
オプション4の利点は下記を含んでいている:
1.一般的なアプローチ、しかし既存のプロトコルおよびインプリメンテーションとなお互換性をもつ。ユーザ受信機は、GPSとガリレオの星群を単一のGNSS(援助データを受信し、測定を返す観点から)と見なすだろう。
【0111】
2.現在のプロトコルの発展。既存のA−GPS情報エレメントは、結合したGPS−ガリレオ受信機のためになお使用されるだろう。
【0112】
3.既存のプロトコルおよびA−GPS実装の上位互換性が維持されるだろう。既存のA−GPSインプリメンテーションは、ガリレオの導入によって影響されないであろう。
【0113】
代替インプリメンテーション
システム、エレメントおよび/または、ここに含まれるプロセスは、ハードウェア、ソフトウェアあるいは両方の組み合わせでインプリメントされ、1台以上のプロセッサ含んでいてもよい。プロセッサは、タスクを行なうための機械可読の命令のセットおよび/または装置である。プロセッサは、コンピュータ、マイクロプロセッサ、コントローラ、特定用途向けIC(ASIC)、有限ステート・マシン、ディジタル信号プロセサ(DSP)あるいは他のあるメカニズムを含み、これらに限定されずに、プロセスを具体化する一連の命令を実行することができる、任意の装置かもしれない。プロセッサは、ハードウェア、ファームウェアおよび/またはソフトウェアの任意の組み合わせも含んでいる。プロセッサは、実行可能なアプリケーションまたは手順、または情報装置によって、および/または出力装置へ情報を送出することによって、使用のための情報を、コンピューティングするか、操作するか、分析するか、修正するか、変換するか、または送信するかにより、格納され、および/または受け取られた情報について、動作する。
【0114】
実行可能なアプリケーションは、例えば、ユーザ・コマンドあるいはインプットに応答して、例えば、オペレーティング・システム、ソフトウェア・アプリケーション・プログラムあるいは他の情報処理システムのものを含む前もって定義した関数をインプリメントするための機械コードあるいは機械可読命令を含む。
【0115】
実行可能な手順は、コード(つまり機械可読命令)のセグメント、サブルーチン、コードの他の別個のセクション、または1つ以上の特定のプロセスを行なうための実行可能なアプリケーションの部分であり、受信される入力パラメータ(あるいは受信される入力パラメータに応じて)上でオペレーションを行ない、そして生じる出力パラメータを提供することを含み得る。
【0116】
様々な実施態様おいて、ハードワイヤードの回路類は、本発明をインプリメントするソフトウェア命令と結合して使用することができる。したがって、技術は、ハードウェア回路とソフトウェアの任意の特定の組み合わせに制限されないし、また、データ処理システムによって実行される命令の任意の個別の出所にも制限されない。さらに、この記述の全体にわたって、様々な関数およびオペレーションは、記述を単純化するため、ソフトウェア・コードによって実行されるか、もたらされると記述される。しかしながら、当業者は、そのような表現によって意味されることが、関数がプロセッサによるコードの実行に起因するということであることを認識するだろう。
【0117】
本発明の態様が少なくとも一部分においてはソフトウェアで具体化されてもよいことはこの記述から明白だろう。すなわち、技術は、機械可読媒体に含まれる命令のシーケンスを実行するそのプロセッサに応じて計算機装置または他のデータ処理システム中で実行され得る。
【0118】
機械可読媒体は、マシン(例えばコンピュータ、ネットワーク装置、携帯情報端末、コンピュータ、ツールを製造するデータ処理装置、1台以上の1セットのプロセッサなどを備えた任意の装置)によってアクセス可能な形式で情報を提供する(つまり、格納または送信する)あらゆるメカニズムを含んでいる。機械可読媒体は、データ処理システムによって実行されたとき、システムに本発明の様々な方法を行なわせるソフトウェアおよびデータを格納するために使用することができる。この実行可能なソフトウェアおよび/またはデータの部分は、種々の場所に格納され得る。例えば、機械可読媒体は、電気的か、光学的か、音響学的か、あるいは他の形式の伝播される信号(例えば搬送波、赤外線信号、ディジタル信号など)などと同様に記録可能な/非記録可能なメディア(例えば読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、ディスク記憶装置メディア、光記憶装置メディア、フラッシュメモリ装置、不揮発性メモリ、キャッシュ、遠隔ストレージ装置など)を含んでいる。先の詳説では、発明はその特有の典型的な実施例に関して記述された。種々の修正が、請求項において示されるごとくの発明のより広い趣旨および範囲から外れずに、それになされてもよいことは明白だろう。従って、明細書と図面は限定的な意味ではなく例示の意味で考えられるべきである。
【図面の簡単な説明】
【0119】
【図1】本発明の1つの態様に従って、全地球型衛星航法システム(global navigation satellite system)(GNSS)、携帯電話システムおよび移動局を含む通信システムのブロック図説明を示す。
【図2】本発明の1つの態様に従って、現在のRRLP仕様に関して、ラジオ・リソース・ロケーション・サービス・プロトコル(radio resource location services protocol)(RRLP)の位置測定要求メッセージおよびRRLP位置測定応答メッセージ、を修正するための4つのオプションを表わす表Aを示す。
【図3】本発明の1つの態様に従って、4つのオプションのうちの1つにより現在のRRLP位置測定要求メッセージおよび現在のRRLP位置測定応答メッセージを修正する方法を示す。
【図4】本発明の1つの態様に従って、現在のRRLP仕様のためのRRLP位置測定要求メッセージを表わす表1を示す。
【図5】本発明の1つの態様に従って、現在のRRLP仕様のためのRRLP位置測定応答メッセージを表わす表2を示す。
【図6】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定要求メッセージを表わす表3を示す。
【図7】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定要求メッセージを表わす表3(つづき)を示す。
【図8】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定応答メッセージを表わす表4を示す。
【図9】本発明の1つの態様に従って、オプション1により修正済のRRLP位置測定応答メッセージを表わす表4(つづき)を示す。
【図10】本発明の1つの態様に従って、オプション2により修正済のRRLP位置測定要求メッセージを表わす表5を示す。
【図11】本発明の1つの態様に従って、オプション2により修正済のRRLP位置測定要求メッセージを表わす表5(つづき)を示す。
【図12】本発明の1つの態様に従って、オプション2によるRRLP位置測定応答メッセージを表わす表6を示す。
【図13】本発明の1つの態様に従って、オプション2によるRRLP位置測定応答メッセージを表わす表6(つづき)を示す。
【図14】本発明の1つの態様に従って、オプション3により修正済のRRLP位置測定要求メッセージを表わす表7を示す。
【図15】本発明の1つの態様に従って、オプション3によるRRLP位置測定応答メッセージを表わす表8を示す。
【図16】本発明の1つの態様に従って、オプション3によるRRLP位置測定応答メッセージを表わす表8(つづき)を示す。
【図17】本発明の1つの態様に従って、オプション4よるRRLP位置測定要求メッセージを表わす表9を示す。
【図18】本発明の1つの態様に従って、オプション4よるRRLP位置測定要求メッセージを表わす表9(つづき)を示す。
【図19】本発明の1つの態様に従って、オプション4によるRRLP位置測定応答メッセージを表わす表10を示す。
【図20】本発明の1つの態様に従って、オプション4によるRRLP位置測定応答メッセージを表わす表10(つづき)を示す。
【特許請求の範囲】
【請求項1】
第1の仕様によって動作するのに適合し、かつ第1の複数の衛星ビークル(SV)を含んでおり、そこでは、前記第1の複数のSVは、第1の複数のユニークな対応する識別子(ID)によって識別されるのに適合している、第1の全地球型衛星航法システム(GNSS)と、
前記第1のGNSSと異なり、前記第1の仕様と異なる第2の仕様によって動作するのに適合し、また前記第1の複数のSVと異なる 第2の複数のSVを含んでおり、そこでは、前記第2の複数のSVは、前記第1の複数のユニークな対応するIDと異なる第2の複数のユニークな対応する識別子(ID)によって識別されるのに適合している、第2のGNSSと、
前記第1の複数のユニークな対応するIDに応じて前記第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適合し、
前記第2の複数のユニークな対応するIDに応じて前記第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合し、
そして、前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するために適合した、プロセッサ、
を備える通信システム。
【請求項2】
前記プロセッサと通信するのに適合し、そして、前記位置ロケーション情報を得ることに応じて移動局の位置を識別するのに適合した前記移動局、
をさらに含む、請求項1に記載の通信システム。
【請求項3】
前記プロセッサは、少なくとも1つの前記移動局およびロケーションサーバに位置する、請求項2に記載の通信システム。
【請求項4】
前記ロケーションサーバから前記移動局に送信される位置測定要求メッセージ、をさらに含む、請求項3に記載の通信システム。
【請求項5】
前記位置測定要求メッセージは、前記第1のGNSSのための測位方法を表わす第1の情報と、
前記第2のGNSSのための測位方法を表わし、前記第1のGNSSのための測位方法に対応する、第2の情報、
をさらに含む、請求項4に記載の通信システム。
【請求項6】
前記位置測定要求メッセージは、
前記第1のGNSSのための援助データを表わす第1の情報と、
前記第2のGNSSのための援助データを表わし、かつ前記第1のGNSSのための援助データに対応する、第2の情報、
をさらに含む、請求項5に記載の通信システム。
【請求項7】
前記第1のGNSSための援助データを表わす前記第1の情報 および、前記第2のGNSSのための援助データを表わす前記第2の情報の各々は、
ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助、およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項6に記載の通信システム。
【請求項8】
前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージ、
をさらに含む、請求項2に記載の通信システム。
【請求項9】
前記位置測定応答メッセージは、
前記第1のGNSSについての測定情報を表わす第1の情報と、
前記第2のGNSSについての測定情報を表わし、そして前記第1のGNSSについての前記測定情報に対応する、第2の情報、
をさらに含む、請求項8に記載の通信システム。
【請求項10】
前記第1のGNSSについての測定情報を表わす前記第1の情報、および前記第2のGNSSについての測定情報を表わす前記第2の情報の各々は、さらに、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素の1つ以上を含む、請求項9に記載の通信システム。
【請求項11】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、およびRMS擬似距離誤差、の要素の1つ以上をさらに含む、請求項10に記載の通信システム。
【請求項12】
前記第1のGNSSおよび前記第2のGNSSは、それぞれ、全地球型測位衛星(GPS)システムおよびガリレオ衛星システムを、さらに含む、請求項1に記載の通信システム。
【請求項13】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、時間依存の援助データであって、前記第2の複数の通信信号についての前記時間依存の援助データは、前記第1の複数の通信信号についての前記時間依存の援助データに変換されるのに適合しているものを、さらに含む、請求項1に記載の通信システム。
【請求項14】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、時間依存の援助データであって、第2の複数の通信信号についての前記時間依存の援助データが、前記第1の複数の通信信号についての時間依存の援助データから、前記第2の複数の通信信号についての時間依存の援助データへの変換を表わすオフセットと結合される前記時間依存の援助データ、をさらに含む、請求項1に記載の通信システム。
【請求項15】
第1の複数の衛星ビークル(SV)に関連した第1の複数のユニークな対応するIDに応じて、第1の仕様によって動作するのに適合した第1の衛星航法システム(NSS)に関係して、前記第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するように、かつ、
第2の複数のSVに関連した第2の複数のユニークな対応するIDに応じて、第2の仕様によって動作するのに適合した第2のナビゲーションNSSに関係して、前記第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するように、そして
前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するように、適合されたプロセッサを含む装置。
【請求項16】
前記プロセッサは、移動局およびロケーションサーバの少なくとも1つに位置する、請求項15に記載の装置。
【請求項17】
前記ロケーションサーバから前記移動局に送信される位置測定要求メッセージ、をさらに含む、請求項16に記載の装置。
【請求項18】
前記位置測定要求メッセージは、
前記第1のNSSのための測位方法を表わす第1の情報と、
前記第2のNSSのための測位方法を表わし、前記第1のNSSのための測位方法に対応する第2の情報、
をさらに含む、請求項17に記載の装置。
【請求項19】
前記位置測定要求メッセージは、
前記第1のNSSのための援助データを表わす第1の情報と、
前記第2のNSSのための援助データを表わし、かつ前記第1のNSSのための援助データに対応する、第2の情報、をさらに含む、請求項17に記載の装置。
【請求項20】
前記第1のNSSための援助を表わすデータ第1の情報および前記第2のNSSのための援助データ表わす第2の情報の各々は、
ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項19に記載の装置。
【請求項21】
前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージを、さらに含む、請求項16に記載の装置。
【請求項22】
前記位置測定応答メッセージは、
前記第1のNSSのための測定情報を表わす第1の情報と、
前記第2のNSSのための測定情報を表わし、かつ前記第1のNSSのための測定情報に対応する、第2の情報、をさらに含む、請求項21に記載の装置。
【請求項23】
前記第1のNSSのための測定情報を表わす第1の情報、および、第2のNSSのための測定情報を表わす第2の情報、の各々は、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素のうちの1つ以上を、さらに含む、請求項22に記載の装置。
【請求項24】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、およびRMS擬似距離誤差、の要素の1つ以上を、さらに含む、請求項23に記載の装置。
【請求項25】
前記第1のNSSおよび前記第2のNSSは、全地球型測位衛星(GPS)システムおよびガリレオ衛星システムを、それぞれ、さらに含む、請求項15に記載の装置。
【請求項26】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、
時間依存の援助データであって、前記第2の複数の通信信号についての時間依存の援助データは、前記第1の複数の通信信号についての時間依存の援助データに変換されるのに適合している時間依存の援助データを、さらに含む、請求項15に記載の装置。
【請求項27】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、
時間依存の援助データであって、前記第2の複数の通信信号についての時間依存の援助データは、前記第1の複数の通信信号についての前記時間依存の援助データから、前記第2の複数の通信信号についての前記時間依存の援助データへの変換を表わすオフセットと結合される時間依存の援助データ、をさらに含む、請求項15に記載の装置。
【請求項28】
第1の複数の衛星ビークル(SV)に関連した第1の複数のユニークな対応するIDに応じて、第1の仕様によって動作するのに適合した第1の衛星航法システム(NSS)に関係して、前記第1の複数のSVから送信される、第1の複数の通信信号を受信および識別することと、
第2の複数のSVに関連した第2の複数のユニークな対応するIDに応じて、第2の仕様によって動作するのに適合した、第2のナビゲーションNSSに関係して、前記第2の複数のSVから送信される、第2の複数の通信信号を受信および識別することと、
前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定すること、
を含む方法。
【請求項29】
第1の衛星航法システム(NSS)のための測位方法を表わす第1の方法情報と、
第2のNSSのための測位方法を表わし、第1のNSSのための測位方法に対応する第2の方法情報と、
前記第1のNSSのための援助データを表わす第1の援助情報と、
前記第2のNSSのための援助データを表わし、かつ第1のNSSのための援助データに対応する、第2の援助情報、
をさらに含む、ロケーションサーバから移動局に送信される位置測定要求メッセージ、
を含む、通信システムにおいてロケーションサーバと移動局の間で通信される信号インターフェース・プロトコル。
【請求項30】
前記第1のNSSのための測定情報を表わす第1の測定情報と、
前記第2のNSSのための測定情報を表わし、かつ第1のNSSのための測定情報に対応する第2の測定情報、
をさらに含む、前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージ、
をさらに含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項31】
前記第1のNSSのための援助データ表わす前記第1の援助情報、および前記第2のNSSのための援助データを表わす前記第2の援助情報の各々は、ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助、およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項32】
前記第1のNSSのための測定情報を表わす前記第1の測定情報、および前記第2のNSSのための測定情報を表わす前記第2の測定情報の各々は、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素のうちの1つ以上を、さらに含む、請求項30に記載の信号インターフェース・プロトコル。
【請求項33】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、またRMS擬似距離誤差、の要素のうちの1つ以上を、さらに含む、請求項32に記載の信号インターフェース・プロトコル。
【請求項34】
前記第1のNSSおよび前記第2のNSSは、全地球型測位衛星(GPS)システムおよびガリレオ衛星システム、をそれぞれ含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項35】
前記第1のNSSための時間依存の援助データから、前記第2のNSSのための時間依存の援助データへの変換を表わす時間オフセット、をさらに含む、請求項29に記載の信号のインターフェース・プロトコル。
【請求項36】
第1のNSSのための測定情報を表わす第1の測定情報と、
第2のNSSのための測定情報を表わし、かつ第1のNSSのための測定情報に対応する第2の測定情報、
を含む、移動局からロケーションサーバに送信される位置測定応答メッセージ、
を含む、通信システムにおけるロケーションサーバと移動局の間で通信される信号インターフェース・プロトコル。
【請求項37】
第1の衛星航法システム(NSS)のための測位方法を表わす第1の方法情報と、
第2のNSSのための測位方法を表わし、かつ前記第1のNSSのための測位方法に対応する第2の方法情報と、
前記第1のNSSのための援助データを表わす第1の援助情報と、
前記第2のNSSのための援助データを表わし、かつ前記第1のNSSのための援助データに対応する第2の援助情報、
をさらに含む、ロケーションサーバから移動局に送信される位置測定要求メッセージ、
をさらに含む、請求項36に記載の信号インターフェース・プロトコル。
【請求項1】
第1の仕様によって動作するのに適合し、かつ第1の複数の衛星ビークル(SV)を含んでおり、そこでは、前記第1の複数のSVは、第1の複数のユニークな対応する識別子(ID)によって識別されるのに適合している、第1の全地球型衛星航法システム(GNSS)と、
前記第1のGNSSと異なり、前記第1の仕様と異なる第2の仕様によって動作するのに適合し、また前記第1の複数のSVと異なる 第2の複数のSVを含んでおり、そこでは、前記第2の複数のSVは、前記第1の複数のユニークな対応するIDと異なる第2の複数のユニークな対応する識別子(ID)によって識別されるのに適合している、第2のGNSSと、
前記第1の複数のユニークな対応するIDに応じて前記第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適合し、
前記第2の複数のユニークな対応するIDに応じて前記第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合し、
そして、前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するために適合した、プロセッサ、
を備える通信システム。
【請求項2】
前記プロセッサと通信するのに適合し、そして、前記位置ロケーション情報を得ることに応じて移動局の位置を識別するのに適合した前記移動局、
をさらに含む、請求項1に記載の通信システム。
【請求項3】
前記プロセッサは、少なくとも1つの前記移動局およびロケーションサーバに位置する、請求項2に記載の通信システム。
【請求項4】
前記ロケーションサーバから前記移動局に送信される位置測定要求メッセージ、をさらに含む、請求項3に記載の通信システム。
【請求項5】
前記位置測定要求メッセージは、前記第1のGNSSのための測位方法を表わす第1の情報と、
前記第2のGNSSのための測位方法を表わし、前記第1のGNSSのための測位方法に対応する、第2の情報、
をさらに含む、請求項4に記載の通信システム。
【請求項6】
前記位置測定要求メッセージは、
前記第1のGNSSのための援助データを表わす第1の情報と、
前記第2のGNSSのための援助データを表わし、かつ前記第1のGNSSのための援助データに対応する、第2の情報、
をさらに含む、請求項5に記載の通信システム。
【請求項7】
前記第1のGNSSための援助データを表わす前記第1の情報 および、前記第2のGNSSのための援助データを表わす前記第2の情報の各々は、
ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助、およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項6に記載の通信システム。
【請求項8】
前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージ、
をさらに含む、請求項2に記載の通信システム。
【請求項9】
前記位置測定応答メッセージは、
前記第1のGNSSについての測定情報を表わす第1の情報と、
前記第2のGNSSについての測定情報を表わし、そして前記第1のGNSSについての前記測定情報に対応する、第2の情報、
をさらに含む、請求項8に記載の通信システム。
【請求項10】
前記第1のGNSSについての測定情報を表わす前記第1の情報、および前記第2のGNSSについての測定情報を表わす前記第2の情報の各々は、さらに、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素の1つ以上を含む、請求項9に記載の通信システム。
【請求項11】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、およびRMS擬似距離誤差、の要素の1つ以上をさらに含む、請求項10に記載の通信システム。
【請求項12】
前記第1のGNSSおよび前記第2のGNSSは、それぞれ、全地球型測位衛星(GPS)システムおよびガリレオ衛星システムを、さらに含む、請求項1に記載の通信システム。
【請求項13】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、時間依存の援助データであって、前記第2の複数の通信信号についての前記時間依存の援助データは、前記第1の複数の通信信号についての前記時間依存の援助データに変換されるのに適合しているものを、さらに含む、請求項1に記載の通信システム。
【請求項14】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、時間依存の援助データであって、第2の複数の通信信号についての前記時間依存の援助データが、前記第1の複数の通信信号についての時間依存の援助データから、前記第2の複数の通信信号についての時間依存の援助データへの変換を表わすオフセットと結合される前記時間依存の援助データ、をさらに含む、請求項1に記載の通信システム。
【請求項15】
第1の複数の衛星ビークル(SV)に関連した第1の複数のユニークな対応するIDに応じて、第1の仕様によって動作するのに適合した第1の衛星航法システム(NSS)に関係して、前記第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するように、かつ、
第2の複数のSVに関連した第2の複数のユニークな対応するIDに応じて、第2の仕様によって動作するのに適合した第2のナビゲーションNSSに関係して、前記第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するように、そして
前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するように、適合されたプロセッサを含む装置。
【請求項16】
前記プロセッサは、移動局およびロケーションサーバの少なくとも1つに位置する、請求項15に記載の装置。
【請求項17】
前記ロケーションサーバから前記移動局に送信される位置測定要求メッセージ、をさらに含む、請求項16に記載の装置。
【請求項18】
前記位置測定要求メッセージは、
前記第1のNSSのための測位方法を表わす第1の情報と、
前記第2のNSSのための測位方法を表わし、前記第1のNSSのための測位方法に対応する第2の情報、
をさらに含む、請求項17に記載の装置。
【請求項19】
前記位置測定要求メッセージは、
前記第1のNSSのための援助データを表わす第1の情報と、
前記第2のNSSのための援助データを表わし、かつ前記第1のNSSのための援助データに対応する、第2の情報、をさらに含む、請求項17に記載の装置。
【請求項20】
前記第1のNSSための援助を表わすデータ第1の情報および前記第2のNSSのための援助データ表わす第2の情報の各々は、
ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項19に記載の装置。
【請求項21】
前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージを、さらに含む、請求項16に記載の装置。
【請求項22】
前記位置測定応答メッセージは、
前記第1のNSSのための測定情報を表わす第1の情報と、
前記第2のNSSのための測定情報を表わし、かつ前記第1のNSSのための測定情報に対応する、第2の情報、をさらに含む、請求項21に記載の装置。
【請求項23】
前記第1のNSSのための測定情報を表わす第1の情報、および、第2のNSSのための測定情報を表わす第2の情報、の各々は、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素のうちの1つ以上を、さらに含む、請求項22に記載の装置。
【請求項24】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、およびRMS擬似距離誤差、の要素の1つ以上を、さらに含む、請求項23に記載の装置。
【請求項25】
前記第1のNSSおよび前記第2のNSSは、全地球型測位衛星(GPS)システムおよびガリレオ衛星システムを、それぞれ、さらに含む、請求項15に記載の装置。
【請求項26】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、
時間依存の援助データであって、前記第2の複数の通信信号についての時間依存の援助データは、前記第1の複数の通信信号についての時間依存の援助データに変換されるのに適合している時間依存の援助データを、さらに含む、請求項15に記載の装置。
【請求項27】
前記第1の複数の通信信号および前記第2の複数の通信信号の各々は、
時間依存の援助データであって、前記第2の複数の通信信号についての時間依存の援助データは、前記第1の複数の通信信号についての前記時間依存の援助データから、前記第2の複数の通信信号についての前記時間依存の援助データへの変換を表わすオフセットと結合される時間依存の援助データ、をさらに含む、請求項15に記載の装置。
【請求項28】
第1の複数の衛星ビークル(SV)に関連した第1の複数のユニークな対応するIDに応じて、第1の仕様によって動作するのに適合した第1の衛星航法システム(NSS)に関係して、前記第1の複数のSVから送信される、第1の複数の通信信号を受信および識別することと、
第2の複数のSVに関連した第2の複数のユニークな対応するIDに応じて、第2の仕様によって動作するのに適合した、第2のナビゲーションNSSに関係して、前記第2の複数のSVから送信される、第2の複数の通信信号を受信および識別することと、
前記第1の複数の通信信号および前記第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定すること、
を含む方法。
【請求項29】
第1の衛星航法システム(NSS)のための測位方法を表わす第1の方法情報と、
第2のNSSのための測位方法を表わし、第1のNSSのための測位方法に対応する第2の方法情報と、
前記第1のNSSのための援助データを表わす第1の援助情報と、
前記第2のNSSのための援助データを表わし、かつ第1のNSSのための援助データに対応する、第2の援助情報、
をさらに含む、ロケーションサーバから移動局に送信される位置測定要求メッセージ、
を含む、通信システムにおいてロケーションサーバと移動局の間で通信される信号インターフェース・プロトコル。
【請求項30】
前記第1のNSSのための測定情報を表わす第1の測定情報と、
前記第2のNSSのための測定情報を表わし、かつ第1のNSSのための測定情報に対応する第2の測定情報、
をさらに含む、前記移動局から前記ロケーションサーバに送信される位置測定応答メッセージ、
をさらに含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項31】
前記第1のNSSのための援助データ表わす前記第1の援助情報、および前記第2のNSSのための援助データを表わす前記第2の援助情報の各々は、ディファレンシャル修正、ナビゲーション・モデル、アルマナック、捕捉援助、およびリアルタイム・インテグリティ、の要素のうちの1つ以上を、さらに含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項32】
前記第1のNSSのための測定情報を表わす前記第1の測定情報、および前記第2のNSSのための測定情報を表わす前記第2の測定情報の各々は、フレーム番号、全地球型測位衛星(GPS)の週の時刻(TOW)、および測定パラメータ、の要素のうちの1つ以上を、さらに含む、請求項30に記載の信号インターフェース・プロトコル。
【請求項33】
前記測定パラメータは、SV ID、C/No、ドップラー、完全なチップ、断片的なチップ、マルチパス・インディケーター、またRMS擬似距離誤差、の要素のうちの1つ以上を、さらに含む、請求項32に記載の信号インターフェース・プロトコル。
【請求項34】
前記第1のNSSおよび前記第2のNSSは、全地球型測位衛星(GPS)システムおよびガリレオ衛星システム、をそれぞれ含む、請求項29に記載の信号インターフェース・プロトコル。
【請求項35】
前記第1のNSSための時間依存の援助データから、前記第2のNSSのための時間依存の援助データへの変換を表わす時間オフセット、をさらに含む、請求項29に記載の信号のインターフェース・プロトコル。
【請求項36】
第1のNSSのための測定情報を表わす第1の測定情報と、
第2のNSSのための測定情報を表わし、かつ第1のNSSのための測定情報に対応する第2の測定情報、
を含む、移動局からロケーションサーバに送信される位置測定応答メッセージ、
を含む、通信システムにおけるロケーションサーバと移動局の間で通信される信号インターフェース・プロトコル。
【請求項37】
第1の衛星航法システム(NSS)のための測位方法を表わす第1の方法情報と、
第2のNSSのための測位方法を表わし、かつ前記第1のNSSのための測位方法に対応する第2の方法情報と、
前記第1のNSSのための援助データを表わす第1の援助情報と、
前記第2のNSSのための援助データを表わし、かつ前記第1のNSSのための援助データに対応する第2の援助情報、
をさらに含む、ロケーションサーバから移動局に送信される位置測定要求メッセージ、
をさらに含む、請求項36に記載の信号インターフェース・プロトコル。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公表番号】特表2009−523247(P2009−523247A)
【公表日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2008−550408(P2008−550408)
【出願日】平成19年1月10日(2007.1.10)
【国際出願番号】PCT/US2007/000754
【国際公開番号】WO2007/082038
【国際公開日】平成19年7月19日(2007.7.19)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公表日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願日】平成19年1月10日(2007.1.10)
【国際出願番号】PCT/US2007/000754
【国際公開番号】WO2007/082038
【国際公開日】平成19年7月19日(2007.7.19)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]