
全地球的航法衛星システム
【課題】全地球的航法衛星システム
【解決手段】
第1及び第2の航法衛星システム(NSS)の各々は、第1及び第2の仕様にそれぞれ従って動作するように適合化され、各々は、第1及び第2の複数の宇宙ビークル(SV)をそれぞれ含む。前記第1及び第2の複数のSVの各々は、第1及び第2の複数の一意の対応する識別(ID)によってそれぞれ識別されるように適合化される。プロセッサは、前記第1の複数の一意の対応するIDに応じて前記第1の複数のSVから送信された第1の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第2の複数の一意の対応するIDに応じて前記第2の複数のSVから送信された第2の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第1の複数の対応する信号及び前記第2の複数の対応する信号を受信及び識別することに応じて位置特定情報を決定するように適合化される。
【解決手段】
第1及び第2の航法衛星システム(NSS)の各々は、第1及び第2の仕様にそれぞれ従って動作するように適合化され、各々は、第1及び第2の複数の宇宙ビークル(SV)をそれぞれ含む。前記第1及び第2の複数のSVの各々は、第1及び第2の複数の一意の対応する識別(ID)によってそれぞれ識別されるように適合化される。プロセッサは、前記第1の複数の一意の対応するIDに応じて前記第1の複数のSVから送信された第1の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第2の複数の一意の対応するIDに応じて前記第2の複数のSVから送信された第2の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第1の複数の対応する信号及び前記第2の複数の対応する信号を受信及び識別することに応じて位置特定情報を決定するように適合化される。
【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本特許出願は、“Virtual GNSS Time”(仮想GNSS時間)いう題名を有し、本発明の譲受人に対して割り当てられており、本明細書において参照されることによって本明細書に組み入れられている米国仮特許出願番号60/782,955(出願日:2006年3月15日)に対する優先権を主張するものである。本特許出願は、“Global Navigation Satellite System”(全地球的航法衛星システム)いう題名を有し、本発明の譲受人に対して割り当てられており、本明細書において参照されることによって本明細書に組み入れられている米国特許出願一連番号11/621,935(出願日:2007年1月10日)の一部継続出願である。
【0002】
本発明は、一般的には、通信システムに関するものである。本発明は、より具体的には、全地球的航法衛星システムを含む通信システムに関するものである。
【背景技術】
【0003】
無線ネットワークにおける移動局の位置を計算する際に採用される数多くの異なる型の技術が存在しており、これらの技術は、様々なレベルの成功度及び精度を有する。アシステッドGPS(A−GPS)は、無線ネットワークにおける移動局の所在位置を特定するために現在用いられる測位技術である。A−GPSサーバーは、短い初期位置算出時間(TTFF)を有すること、弱い信号の取得を可能にすること、及び移動局の電池使用を最適化することを目的として援助データを移動局に提供する。A−GPSは、隔離された状態での位置特定技術として用いられるか又は疑似距離(range−like)測定値を提供するその他の測位技術とハイブリッド化される。
【0004】
A−GPSサーバーは、無線移動局の概算位置専用のデータを無線移動局に提供する。援助データは、移動局が素早く衛星にロックオンするのを援助し、潜在的に、ハンドセットが弱い信号にロックオンするのを可能にする。これで、移動局は、位置計算を行うか、又はオプションとして、該計算を行うために、測定された符号位相及び潜在的に搬送波位相をサーバーに戻す。A−GPSサーバーは、例えば十分な数の衛星が見えないときに、本来であれば可能でない可能性がある場合に位置を計算するために追加情報、例えばセルラー基地局から移動局への往復タイミング測定値、を利用することができる。
【0005】
衛星に基づく全地球測位システム(GPS)、タイミングアドバンス(TA)、及び地上における強化観測時間差(E−OTD)位置固定技術の進歩は、移動局加入者の地理上の位置(例えば、緯度及び経度)の正確な決定を可能にする。地理上の位置特定サービスは無線通信ネットワーク内において展開されるため、該位置情報は、ネットワーク要素内に格納すること及びシグナリングメッセージを用いてネットワーク内のノードに引き渡すことができる。該情報は、SMLC(サービングモバイルロケーションセンター)、SAS(独立型SMLC)、PDE(位置決定エンティティ)、SLP(セキュアユーザープレーンロケーションロケーションプラットフォーム)及び特殊目的移動加入者位置データベース)において格納することができる。
【0006】
特殊目的移動加入者位置データベースの一例は、第三世代パートナーシッププロジェクト(3GPP)によって提案されるSMLCである。特に、3GPPは、SMLCへの及びSMLCからのモバイル加入者位置情報を通信するためのシグナリングプロトコルを定義している。このシグナリングプロトコルは、無線資源LCS(位置特定サービス)と呼ばれてRRLPで表され、移動局とモバイル加入者の位置に関連するSMLCとの間において通信されるシグナリングメッセージを定義する。RRLPプロトコルに関する詳細な説明が、3GPP TS 44.031 v7.2.0(2005−11)第三世代パートナーシッププロジェクト;Technical Specification Group GSM Edge Radio Access Network(技術仕様グループGSMエッジ無線アクセスネットワーク); Location Services(LCS);Mobile Station(MS)−Serving Mobile Location Center(SMLC) Radio Resource LCS Protocol(RRLP)(Release7)(サービングモバイルロケーションセンター(SMLC)無線資源 LCSプロトコル)(RRLP)(リリース7)において行われている。
【0007】
米国全地球測位システム(GPS)に加えて、その他の衛星測位システム(SPS)、例えばロシアのGLONASSシステム又は提案されている欧州ガリレオシステム、又は提案されている中国のコンパス/北斗システムも移動局の位置特定のために用いることができる。しかしながら、これらのシステムの各々は、異なる仕様に従って動作する。特に、これらのシステムの各々は、独自の専用システム時間を用いる。
【0008】
ガリレオの打ち上げに伴い、可視航法衛星数が、基本的には、結合GPS/ガリレオ受信機においては2倍、結合GPS/GLONASS/ガリレオ受信機においては3倍になっており、一般的にはサービス利用可能性及び精度が向上している。これらの追加の衛星は、冗長性を提供し、例えば十分な幾何学的精度低下率(GDOP)を維持する一方で不良な品質の測定値を排除するために用いることができる。
【0009】
一定の極めて重要な航行シナリオにおいては、例えば結合GPS/ガリレオ受信機は、GPS及びガリレオのいずれもが成功裏の航法ソリューションを入手する上で十分な衛星測定値を単独で提供しない場合に位置フィックス(fix)を入手することができる。
【0010】
GPS(全地球測位システム)及びガリレオは、独立したナビゲーションシステムであり、従って、各システムは、自己の航行時間基準を用いる。GPSシステム時間は、UTC(USNO)と呼ばれる米国海軍観測衛星によって維持されるuniversal temps coordine(UTC)(協定世界時)に従って調整される。GPSシステム時間は、UTC(USNO)の1マイクロ秒モジュロ1秒内に維持するように規定されている。
【0011】
ガリレオシステム時間は、国際原子時間(TAI)に従って調整されることが期待されており、TAIの50ns以内に維持するように規定されている。潜在的な整数秒数に加えて、GPSとガリレオシステム時間との間におけるオフセットは、数十ナノ秒のオーダーであることが期待されている。
【0012】
GPSとガリレオシステム時間との間におけるオフセットは、将来のGPSブロードキャスト航法メッセージ内に加えてガリレオブロードキャスト航法メッセージ内に含められることになり、GPS−ガリレオ時間オフセット、より一般的にはGPS−GNSS時間オフセット(GGTO)と呼ばれる。GPSに関しては、GGTOは、IS−GPS−200、Revision Dの2004年12月版のメッセージ型35において既に規定されており、GPS−ガリレオGGTO及びGPS−GLONASS GGTOを含むことができる。
【0013】
例えば、航法ソリューションにおいてGPS及びガリレオ疑似距離測定値を用いる結合GPS/ガリレオ受信機は、以下の3つの選択肢に従って機能することができる。
【0014】
1. 位置計算においてGPS−ガリレオ時間オフセットを無視する。
【0015】
2. 航法ソリューションの一部として追加の衛星信号測定値を用いてGGTOを入手する。
【0016】
3. 航法メッセージを復号することによって又はセルラーネットワークによって提供される援助データを介して入手可能なGGTOを用いる。
【0017】
第1の選択肢は、結果的にバイアスを有する航法ソリューションになる可能性がある。バイアス量は、実際のGGTOに依存し、一定のシナリオにおいては受け入れ可能であるが、当然のことながらその他の選択肢よりも望ましくない。
【0018】
第2の選択肢は、航法ソリューションにおいて少なくとも1つの追加の衛星測定値が要求され、該測定値は、一定の重要シナリオ(例えば、屋内又は都市のビルの谷間)においては常には入手できない可能性がある。三次元位置、受信機時間バイアス、及びGGTOに関する解決のために最低5つの衛星測定値が要求されることになるが、精度を向上させるために6つ以上の衛星測定値が望ましい。
【0019】
第3の選択肢は、追加の衛星測定値を要求せず、衛星の可視度が制限されている環境(例えば、屋内又は都市のビルの谷間)において好ましい手法である。GGTOは、衛星航法メッセージを復号することによって入手することができ(ただし、十分な衛星信号強度を要求し、相対的に長時間を要する、すなわちTTFFを長くする)、又は援助データメッセージ内において提供することができる(ただし、標準化された位置特定プロトコルの修正を要求する)。ユーザー受信機は、GPS及びガリレオ衛星に関する疑似距離を結合時にGGTOを考慮に入れなければならない。GPS及びガリレオのいずれによる観測も、航法ソリューションを適用する前にGGTOに関して補正しなければならない。
【0020】
しかしながら、航法ソリューションにおいて様々な異なるシステム時間及び時間オフセットを取り扱うことは、既存のユーザー受信機の実質的な改修を要求し、明らかなことに、この能力を有する次世代のユーザー受信機の生産に関わるコストを上昇させることになる。
【0021】
従って、モバイル受信機において様々なGNSSシステム時間を処理する必要なしに及び援助及びモバイル測定データの転送に関する完全に新しい位置特定プロトコルを指定することなしに位置特定に関するよりいっそうの効率及び利点を提供するために、単に1つの衛星システムだけではなく2つ以上の衛星システムから送信された衛星信号に基づいて移動局に関する所在位置を決定することができる、全地球的航法衛星システム(GNSS)を含む通信システムが必要である。
【0022】
さらに、既存のユーザー受信機に関する多額のアップグレードコストを発生させずに及び将来のユーザー受信機に関する生産コストを発生させずにGGTOに関する計算及び補正を行うように適合化された通信システム、方法及び/又は装置が必要である。
【発明の開示】
【発明の概要】
【0023】
本発明は、方法、装置、及び/又はシステムを含む。前記装置は、前記方法を実行するデータ処理システムと、前記データ処理システムにおいて実行されたときに前記データ処理システムに前記方法を実行させる実行可能アプリケーションを格納するコンピュータによって読み取り可能な媒体と、を含むことができる。
【0024】
本発明の一側面により、第1及び第2の全地球的航法衛星システム(GNSS)の各々は、第1及び第2の仕様にそれぞれ従って動作するように適合化され、各々は、第1及び第2の複数の宇宙ビークル(SV)をそれぞれ含む。前記第1及び第2の複数のSVの各々は、第1及び第2の複数の一意の対応する識別(ID)によってそれぞれ識別されるように適合化される。プロセッサは、前記第1の複数の一意の対応するIDに応じて前記第1の複数のSVから送信された第1の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第2の複数の一意の対応するIDに応じて前記第2の複数のSVから送信された第2の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第1の複数の対応する信号及び前記第2の複数の対応する信号を受信及び識別することに応答して位置特定情報を決定するように適合化される。
【0025】
本発明のその他の側面により、本発明は、装置、方法、コンピュータによって読み取り可能な媒体、及び信号プロトコルを採用する。
【0026】
本発明のこれらの及びその他の側面は、添付図面から及び以下の発明を実施するための最良の形態から明確になるであろう。
【0027】
本発明の側面は、例として示されるものであり、添付図面内の図において制限することを目的とするものではない。同様の参照番号は、対応する要素を示す。
【発明を実施するための最良の形態】
【0028】
以下の説明及び図面は、本発明を例示するものであり、本発明を制限するものであるとは解釈すべきではない。本発明について徹底的に理解できるようにするために数多くの特定の詳細事項が説明される。しかしながら、一定の場合においては、本発明に関する説明を曖昧にするのを回避するために、よく知られる又は従来の詳細事項については説明されない。本開示における1つの実施形態又はいずれかの実施形態への参照は、必ずしも同じ実施形態のみを参照するものではなく、該参照は、1つ以上の実施形態を含む。
【0029】
通信システム10
図1は、本発明の一側面による、全地球的航法衛星システム(GNSS)11と、セルラーシステム12と、ランドライン電話システム13と、を含む通信システム10を表すブロック図である。GNSSシステム11は、複数の全地球的航法衛星14乃至21を含み、第1のGNSSと関連づけられた第1の組の衛星14乃至第17と、第2のGNSSと関連づけられた第2の組の衛星18乃至21と、を含む。第1及び第2のGNSSは、いずれかの2つの異なるGNSS、例えば、米国全地球測位システム(GPS)又はその他の衛星測位システム(SPS)、例えばロシアのGLONASSシステム、又は提案されている欧州ガリレオシステム、であることができる。図1は、2つのGNSSのみを示すが、本発明は、2つのGNSSに限定されない。例えば、GNSS11は、3つ以上の衛星システム、例えばGPS、ガリレオ及びGLONASS衛星、を具備することができる。
【0030】
セルラーシステム12は、複数のセルラー基地局22乃至24(“基地局”)と、移動交換局25と、位置決定エンティティ(PDE)26とも呼ばれる位置特定サーバーと、を含む。PDE26は、3GPP SMLC又は3GPP SASであることができる。各基地局22乃至24は、基地局(BS)送信機27と、BS受信機28と、GPS受信機29と、第1のGNSS受信機(例えば、GPS受信機)29と、第2のGNSS受信機(例えば、ガリレオ受信機)30と、をさらに含む。各基地局22乃至24は、図1に示されないより多くのGNSS受信機(例えば、追加のGLONASS受信機)を含むことができる。GNSS受信機の全部又は一部は、基地局22乃至24の内部又は外部に配置することができる。GPS受信機29は、GPS衛星14乃至17から信号を受信する。ガリレオ受信機35は、ガリレオ衛星18乃至21から信号を受信する。同様に、図1に示されない各追加のGNSS受信機は、該当するGNSS衛星から信号を受信する。
【0031】
通信システム10は、移動局31に関する無線通信を提供し、セルラー、固定無線、PCS、又は衛星通信システムに限定されない。通信システム10は、いずれかの基準又はプロトコル、例えばCDMA、TDMA、FDMA、又はGSM、又はその組合せに従って複数のアクセス通信に備えることができる。
【0032】
全地球的航法衛星システム(GNSS)11
GNSSシステム11は、衛星、例えばGPS衛星14乃至17及びガリレオ衛星18乃至21の集合体であり、各々の衛星は、地表上方における予測可能な軌道上を走行する。各衛星は、衛星にとって一意の疑似雑音(PN)符号によって変調された信号を送信する。各PN符号は、予め決められたチップ数を具備する。例えば、GPS Coarse/Acquition(C/A)符号を具備し、PN符号は、ミリ秒ごとに繰り返される1,023のチップシーケンスである。GPS受信機、例えばGPS受信機24、は、GSP受信機にとって可視である各々の衛星からの信号の混合を具備する合成信号を受信する。受信機内の信号検出器は、特定の衛星に関する受信された信号とPN符号のシフトされたバージョンとの間の相関関係度を決定することによって該特定の衛星からの送信を検出する。シフトオフセットのうちの1つに関する相関値内における十分な品質のピークが検出された場合は、GPS受信機は、衛星からの送信を検出しているとみなされる。
【0033】
無線セルラーネットワーク(例えば、セルラーシステム12)において移動局31に関する位置特定を行うために、幾つかの手法は、例えば、幾つかのジオメトリ的に異なる測定値、例えば距離、疑似距離、往復遅延及び個別の基準点(例えば、GPS衛星、疑似衛星、基地局、地球表面)と関連づけられたその他、を用いて位置計算を行う。
【0034】
高度順方向リンク三角測量法(AFLT)、強化観測時間差法(E−OTD)、又は観測到着時間差法(OTDOA)と呼ばれる1つの手法は、移動局31において、幾つかの基地局の各々から送信された信号(例えば基地局22乃至24からの送信)の到着時間を測定する。これらの時間又は時間差は、位置決定エンティティ(PDE)(例えばロケーションサーバー)26に送信され、位置決定エンティティ(PDE)(例えばロケーションサーバー)26は、これらの受信時間又は時間差を用いて移動局31の位置を計算する。これらの基地局における送信時間は、特定の時間インスタンスにおいて複数の基地局22乃至24と関連づけられた時刻が知られておりさらに規定された誤差限度内にあるような形で調整又は測定される。基地局22乃至24の正確な位置及び受信時間は、移動局31の位置を決定するために用いられる。
【0035】
AFLTシステムにおいては、基地局22乃至24からの信号の受信時間が移動局31において測定される。このタイミングデータは、移動局31の位置を計算するために用いることができる。該計算は、移動局31によって入手されたタイミング情報が通信リンクを介してロケーションサーバー26に送信される場合は、移動局31において又はロケーションサーバー26において行うことができる。典型的には、受信時間は、セルラー基地局22乃至24のうちの1つを通じてロケーションサーバー26に通信される。ロケーションサーバー26は、移動交換局25を通じて基地局からデータを受信するために結合される。ロケーションサーバー26は、基地局の位置及び/又は基地局のカバレッジエリアを提供する基地局アルマナック(BSA)サーバーを含むことができる。代替として、ロケーションサーバー26及びBSAサーバーは、互いに別々であることができ、ロケーションサーバー26は、基地局と通信して位置決定用の基地局アルマナックを入手する。移動交換局25は、移動局31に信号が搬送できるようにするため又は移動局31からその他の電話(例えば、ランドライン公衆交換電話システム(PSTS)13におけるランドライン電話又はその他の携帯電話)に信号を搬送できるようにするために、PSTSに又はPSTSから信号(例えば、音声、データ、及び/又は映像通信)を提供する。幾つかの場合においては、ロケーションサーバー26は、セルラーリンクを介して移動交換局25と通信することもできる。(関連づけられた位置測定ユニット(LMU)を用いることができる)ロケーションサーバー26は、基地局22乃至24のうちの幾つかからの発射(emission)の相対的タイミングを決定することを目的としてこれらの発射をモニタリングすることもできる。
【0036】
アップリンク到着時間差(UTDOA)法と呼ばれる他の手法においては、移動局31からの信号の受信時間は、幾つかの基地局22乃至24において測定される。このタイミングデータは、移動局31の位置を計算するためにロケーションサーバー26に通信することができる。
【0037】
位置特定を行う第3の手法は、米国全地球測位システム(GPS)又はその他の衛星測位システム(SPS)、例えば、ロシアのGLONASSシステム、提案されている欧州ガリレオシステム、提案されている中国のコンパス/北斗システム、提案されているインドの地域航法システム(IRNS)、及び提案されている日本の準天頂衛星システム(QZSS)等の様々な増強システム、に関する受信機を移動局31において用いることが関わっている。既存のGLONASSシステムは、主に、複数の異なる衛星からの発射は異なる疑似ランダム符号を利用するのではなくわずかに異なる搬送波周波数を利用することによって互いに区別される点がGPSシステムと異なる。この状況においては、及びガリレオシステムの場合には、前述される実質上すべての回路及びアルゴリズムを適用可能である。本明細書において用いられる“GNSS”という用語は、該代替衛星測位システムを含み、ロシアのGLONASSシステム及び提案されている欧州のガリレオシステム、及び上述される又は上述されないその他のシステムを含む。
【0038】
第3の手法において、GPS受信機34は、衛星14乃至17の一部からの送信を検出することによって自己の位置を推定する。各検出された送信に関して、受信機は、PN符号のシフトを用いて送信時間と到着時間との間の(チップ又はチップの一部を単位とする)遅延を推定する。測位信号の既知の伝播速度が与えられている場合、GPS受信機は、自己と衛星との間の距離を推定する。この推定された距離は、衛星の周囲の球体を定義する。GPS受信機34は、各々の衛星の精密な軌道及び位置を知っており、これらの軌道及び位置の更新を連続的に受信する。この情報から、GPS受信機34は、4つの衛星に関する球体が交差する点から位置(及び現在時間)を決定することができる。ガリレオ受信機35(又はその他のGNSS受信機)は、GPS受信機34と組み合わせて、又はGPS受信機34の代替受信機として、衛星18乃至21のうちの少なくとも4つの衛星からの送信を検出することによって位置を推定することができる。
【0039】
本発明の方法及び装置は、GPS衛星を参照して説明されているが、この説明は、疑似衛星、又は衛星と疑似衛星の組合せを利用する測位システムに対しても等しく当てはめることができる点が理解されるであろう。疑似衛星は、地上に基づく送信機であり、Lバンド搬送波信号において変調されて一般的にはGPS時間と同期化された(GPS信号と類似の)PN符号をブロードキャストする。各送信機は、遠隔受信機による識別を可能にするための一意のPN符号を割り当てることができる。疑似衛星は、軌道周回衛星からのGPS信号を入手できない状況、例えば、トンネル、鉱山、ビル、又はその他の密閉されたエリア、において有用である。本明細書において用いられる“衛星”という用語は、疑似衛星又は疑似衛星の同等物を含むことが意図され、本明細書において用いられるGPS信号という用語は、疑似衛星又は疑似衛星の同等物からのGPSに類似の信号を含むことが意図される。
【0040】
衛星測位信号(SPS)信号に関して受信機を用いる該方法は、完全自律型であることができ又はセルラーネットワークを利用して援助データを提供するか又は位置計算を共有することができる。これらの様々な方法は、略して“GPS”と呼ばれる。米国特許5,945,944、5,874,914、6,208、290、5,812,087、及び5,841,396において該方法の例が説明されている。
【0041】
例えば、米国特許番号5,945,944は、受信機の位置を決定するためにGPS信号と組み合わせて用いられる正確な時間情報を携帯電話送信信号から入手するための方法を説明する。米国特許番号5,874,914は、視界内衛星のドップラー周波数シフトを通信リンクを通じて受信機に送信して受信機の位置を決定する方法を説明する。米国特許番号5,874,914は、通信リンクを通じて衛星アルマナックデータ(又はエフェメリスデータ)を受信機に送信して受信機による位置決定を援助する方法をさらに説明する。米国特許番号5,874,914は、携帯電話システムの精密搬送波周波数信号にロックしてGPS信号取得に関して受信機において基準信号を提供する方法も説明する。米国特許番号6,208,290は、受信機の概算位置を用いてSPS信号処理時間を短縮するための概算ドップラーを決定する方法を説明する。米国特許番号5,812,087は、受信機の位置を決定するために、異なるエンティティにおいて受信された衛星データメッセージの異なる記録を比較して、これらの記録のうちの1つが受信機において受信された時間を決定する方法を説明する。
【0042】
実際的な低コスト実装においては、両方のMS受信機33、GPS受信機34、及び/又はガリレオ(又はその他のGNSS)受信機35が同じエンクロージャ内に組み込まれ、実際には、受信機回路及び/又はアンテナ等の共通の電子回路を共有することができる。
【0043】
上記方法のさらに他の変形においては、往復遅延(RTD)が、基地局22、23、又は24から移動局31に送信されて対応する基地局22、23、又は24に戻される信号に関して見つけ出される。同様の、ただし代替の方法においては、往復遅延は、移動局31から基地局に送信されて移動局31に戻される信号に関して見つけられる。往復遅延は、各々が2で割り算されて片道の時間遅延の推定値が決定される。基地局の位置、及び片道遅延を知っていることは、移動局31の位置を地球上における1つの円に限定する。個別の基地局からのこれらの2つの測定値の結果、2つの円の交差点が得られ、該交差点は、地球上における2点に位置を限定する。第3の測定値(さらには到着角度又はセルセクター)が曖昧さを解決する。
【0044】
AFLT又はTDOA等の他の測位方法とGPSシステムの組合せは、“ハイブリッド”システムと呼ばれる。例えば、米国特許番号5,999,124は、少なくともi)セルに基づくトランシーバと通信システムとの間におけるセルに基づく通信システム内のメッセージの走行時間を表す時間測定値、及びii)SPS信号の走行時間を表す時間測定値の組合せから決定されるハイブリッドシステムを説明する。
【0045】
モバイルデバイスの位置を決定するための様々な方法において、高度による補助が用いられている。高度による補助は、典型的には、高度の疑似測定値に基づく。移動局31の位置の高度を知っていることは、移動局31の可能性のある位置を、その中心が地球の中心に位置する球体(楕円体)の表面に限定する。この知識は、移動局31の位置を決定するために要求される独立した測定値の数を減らすために用いることができる。例えば、米国特許番号6,061,018は、セルオブジェクトの情報から決定され、該セルオブジェクトは、移動局31と通信中のセルサイト送信機を有するセルサイトであることができる。
【0046】
最低限の一組の測定値を入手可能であるときには、移動局31の位置に関して航法方程式の一意の解を求めることができる。2つ以上の追加測定値を入手可能であるときには、(例えば、航法方程式の残留ベクトルを最小にする最小二乗解法手順を通じて)すべての入手可能な測定値に最良の形で適合する「最良の」解を求めることができる。残留ベクトルは、冗長な測定値が存在するときには該測定値における雑音又は誤差に起因して典型的にはゼロでないため、完全性監視アルゴリズムを用いて全測定値が互いに整合するかどうかを決定することができる。
【0047】
例えば、伝統的な受信機自律型完全性監視(RAIM)アルゴリズムを用いて、冗長測定値の組において整合性問題が存在するかどうかを検出することができる。例えば、1つのRAIMアルゴリズムは、
航法方程式に関する残留ベクトルの規模がしきい値を下回るかどうかを決定することができる。残留ベクトルの規模がしきい値よりも小さい場合は、測定値は整合するとみなされる。残留ベクトルの規模がしきい値よりも大きい場合は、完全性問題が存在し、その場合は、冗長な測定値のうちで最も大きい非整合性を生じさせているとみられる測定値を除去して改良された解を求めることができる。
【0048】
セルラーシステム12
先行技術においてよく知られるように、典型的には、地理上のエリアを無線カバレッジで網羅するために複数のセルラー基地局22乃至24が配置され、これらの異なる基地局22乃至24は、少なくとも1つの移動交換局25に結合される。このように、複数の基地局22乃至24が地理的に分散されるが、移動交換局25によって結合される。セルラーシステム12は、差分GPS情報を提供する基準GPS受信機29のネットワークに接続することができ、さらに、移動局の位置を計算する際に用いるためのGPSエフェメリスデータを提供することができる。セルラーシステム12は、差分ガリレオ(又はその他のGNSS)情報を提供する基準ガリレオ(又はその他のGNSS)ネットワークに接続することができ、さらに、移動局の位置を計算する際に用いるためのガリレオ(又はその他のGNSS)エフェメリスデータを提供することができる。セルラーシステム12は、モデム又はその他の通信インタフェースを通じてその他のコンピュータ又はネットワーク構成要素に、及び/又は911番電話に応答する緊急オペレータによって操作されるコンピュータシステム、例えば緊急通報センター、に結合される。IS−95に準拠するCDMAシステムにおいては、各基地局又はセクター22乃至24は、パイロット信号を送信し、該パイロット信号は、その基地局を一意で識別する繰り返し疑似ランダム雑音(PN)符号によって変調される。例えば、IS−95に準拠するCDMAシステムに関しては、PN符号は、26.67ミリ秒ごとに繰り返される32,768チップシーケンスである。
【0049】
ロケーションサーバー26は、典型的には、モデム又はネットワークインタフェース等の通信デバイスを含む。ロケーションサーバー26は、通信デバイス(例えば、モデム又はその他のネットワークインタフェース)を通じて幾つかの異なるネットワークに結合することができる。該ネットワークは、移動交換局25又は複数の移動交換局、陸上に基づく電話システムスイッチ、セルラー基地局22乃至24、その他のGPS信号受信機、その他のガリレオ受信機、その他のGNSS受信機、又はその他のプロセッサ又はロケーションサーバーを含む。ロケーションサーバー26を用いるための方法の様々な例が、米国特許5,841,396、5,874,914、5,812,087、及び6,215,442を含む数多くの米国特許において説明されている。
【0050】
データ処理システムの一形態であるロケーションサーバー26は、マイクロプロセッサ、ROM、揮発性RAM及び非揮発性メモリ(いずれも示されていない)に結合されたバスを含む。プロセッサは、キャッシュメモリ(示されていない)に結合される。バスは、これらの様々な構成要素をまとめて相互に接続する。ロケーションサーバー26は、モデム又はイーサネット(登録商標)インタフェース等のネットワークインタフェースを通じてデータ処理システムに結合されるセルラーシステム12、例えばネットワーク記憶装置、から遠隔である非揮発性メモリを利用することができる。バスは、当業においてよく知られる様々なブリッジ、コントローラ、及び/又はアダプタを通じて互いに接続された1つ以上のバスを含むことができる。多くの状況においては、ロケーションサーバー26は、人間の援助なしで自動的に動作を行うことができる。人間による対話が要求される幾つかの設計においては、I/Oコントローラ(示されていない)は、ディスプレイ、キーボード、及びその他のI/Oデバイスと通信することができる。さらに、これよりも少ない数の構成要素又はおそらくこれよりも多い数の構成要素を有するネットワークコンピュータ及びその他のデータ処理システムも本発明とともに用いることができること及びロケーション又はPDEとして行動できることも理解されるであろう。
【0051】
移動局31
セルラー移動局31(“移動局”)は、第1のGNSS受信機(例えば、GPS受信機)34と、第2のGNSS受信機(例えば、ガリレオ受信機)35又は第3の追加のGNSS受信機(例えば、GLONASS受信機)と、移動局(MS)送信機32と、移動局受信機33と、を含む。GPS受信機34は、GPS衛星14乃至17からの信号を受信する。ガリレオ受信機35は、ガリレオ衛星18乃至21からの信号を受信する。MS送信機32は、通信信号をBS受信機28に送信する。MS受信機33は、BS送信機27から通信信号を受信する。
【0052】
図1に示されていない移動局31のその他の要素は、例えば、GPSアンテナと、ガリレオ(又はその他のGNSS)アンテナと、セルラーアンテナと、プロセッサと、ユーザーインタフェースと、ポータブル電源と、メモリデバイスと、を含む。プロセッサは、プロセッサポートと、その他のモバイル機能と、をさらに含む。
【0053】
移動局31においては、各衛星信号受信アンテナ及び衛星信号受信機は、衛星信号を受信及び処理するために要求される機能を実行するための取得及び追跡回路(示されていない)等の回路を含む。衛星信号(例えば、1つ以上の衛星14乃至17、及び/又は18乃至21)から送信された信号)が、衛星アンテナを通じて受信され、様々な受信された衛星に関するPN(疑似ランダム雑音)符号を取得する取得及び追跡回路に入力される。回路によって生成されたデータ(例えば、相関インジケータ(示されていない))が、単独で又はセルラーシステム12から受信された又はセルラーシステム12によって処理されたその他のデータと組み合わせてプロセッサによって処理され、位置特定データ(例えば、緯度、経度、時間、衛星、等)が生成される。
【0054】
セルラーアンテナ及びセルラートランシーバ(例えば、MS送信機32及びMS受信機33)は、通信リンクを通じて受信及び送信された通信信号を処理するために要求される機能を実行するための回路を含む。通信リンクは、典型的には、他の構成要素、例えば通信アンテナ(示されていない)を有する1つ以上の基地局22乃至24、への無線周波数通信リンクである。
【0055】
セルラートランシーバは、通信信号(例えば、無線周波数信号)を通信アンテナ及びセルラートランシーバにルーティングする又は通信アンテナ及びセルラートランシーバからルーティングする送信/受信スイッチ(示されていない)を含む。幾つかの移動局においては、T/Rスイッチの代わりにバンド分割フィルタ、又は“デュプレクサ”が用いられる。受信された通信信号は、セルラートランシーバ内の通信受信機に入力され、処理のためプロセッサに渡される。プロセッサから送信される通信信号は、トランシーバ内に各々配置された変調器及び周波数コンバータ(示されていない)に伝搬される。セルラートランシーバ内の電力増幅器(示されていない)は、信号の利得を、1つ以上の基地局22乃至24に送信するための適切なレベルまで上げる。
【0056】
移動局31の一実施形態においては、GPS受信機24及び/又はガリレオ受信機35内の取得及び追跡回路によって生成されたデータは、通信リンク(例えば、セルラーチャネル)を通じて1つ以上の基地局22乃至24に送信される。次に、ロケーションサーバー26は、1つ以上の衛星受信機34及び35からのデータ、データが測定された時間、及び基地局自体の衛星受信機又は該データのその他のソースから受信されたエフェメリスデータに基づいて移動局31の位置を決定する。これで、位置特定データを移動局31又はその他の遠隔位置に送信して戻すことができる。通信リンクを利用するポータブル受信機に関するさらなる詳細事項が、共通譲渡された米国特許番号5,874,914において開示されている。
【0057】
移動局31は、データ入力デバイス及びデータ出力データ(いずれも示されていない)をさらに提供することができるユーザーインタフェース(示されていない)を含むことができる。
【0058】
データ入力デバイスは、典型的には、ユーザーから手作業で又は他の電子デバイスから自動的に入力データを受信することに応じてプロセッサにデータを提供する。手作業による入力に関しては、データ入力デバイスはキーボード及びマウスであるが、例えばタッチ画面、又はマイクと音声認識アプリケーションであることもできる。
【0059】
データ出力デバイスは、典型的には、ユーザー又は他の電子デバイスによって用いるためにプロセッサからデータを提供する。ユーザーへの出力に関しては、データ出力デバイスは、表示信号をプロセッサから受信することに応じて1つ以上の表示画像を生成するディスプレイであるが、例えばスピーカー又はプリンタであることもできる。表示画像の例は、例えば、テキスト、グラフィックス、映像、写真、画像、グラフ、チャート、書式、等であることもできる。
【0060】
移動局31は、あらゆる型のデータ記憶デバイス、例えば、コンピュータメモリデバイス又はその他の有形の又はコンピュータによって読み取り可能な媒体、を代表するメモリデバイス(示されていない)を含むこともできる。メモリデバイスは、1つ以上の場所に配置されて移動局の特定の実装に依存して1つ以上の技術として実装された1つ以上のメモリデバイスを代表するものである。さらに、メモリデバイスは、プロセッサによって読み取り可能であってデータ及び/又はプロセスを具体化した一連の命令を格納可能であるあらゆるデバイスであることができる。メモリデバイスの例は、限定されることなしに、RAM、ROM、EPROM、EEPROM、PROM、ディスク(ハード又はフロッピー(登録商標)ディスク)、CD−ROM、DVD、フラッシュメモリ、等を含む。
【0061】
移動局31は、移動局31の動作を制御するプロセッサ(示されていない)を含むことができる。プロセッサ内のその他のモバイル機能は、本明細書において説明されていない移動局31のその他のいずれかの又はすべての機能を代表するものである。該その他のモバイル機能は、例えば、移動局31が電話をかけること及びデータを通信することを許可するように移動局31を動作させることを含む。
【0062】
移動局31は、移動局31の電気的素子に関するポータブルな電気エネルギーを貯蔵及び提供するポータブル電源(示されていない)を含むことができる。ポータブル電源の例は、限定されることなしに、電池と、燃料電池と、を含む。ポータブル電源は、充電可能であること又は充電可能でないことができる。ポータブル電源は、典型的には、限られた量の貯蔵された電気エネルギーを有しており、移動局が動作し続けることができるようにある程度の量を使用後に交換又は再生する必要がある。
【0063】
移動局31は、固定型(すなわち、静止型)及び/又は移動型(すなわち携帯式)であることができる。移動局31は、様々な形態で実装することができ、限定されることなしに、次のデバイス、すなわち、パソコン(PC)、デスクトップコンピュータ、ラップトップコンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパーコンピュータ、ネットワークに基づくデバイス、データプロセッサ、パーソナルデジタルアシスタント(PDA)、スマートカード、携帯電話、ページャー、腕時計のうちの1つを含む。
【0064】
位置特定用途
位置特定用途例は、陸上、海上、及び空中における無限の様々な用途を含む。科学界は、精密タイミング能力及び位置情報に関してGPSを用いる。測量士は、ますます増加しつつある測量作業に関してGPSを用いる。娯楽における位置特定用途は、利用可能な娯楽スポーツ数と同じくらい多様である。位置特定は、例えばハイカー、ハンター、マウンテンバイク乗り手、クロスカントリースキーヤーの間で頻繁に用いられる。指定された所在位置までの経路を見つけるため又は進行方向又は速度を知るために自己の現在位置を常に追跡する必要がある人は、全地球測位システムの利益を利用することができる。位置特定は、現在では車両においても一般的である。幾つかの基本的なシステムが配備されており、ボタンを押すだけで(例えば、現在位置を派遣センターに送信することによって)道路に関する緊急援助を提供する。より精巧なシステムは、街路図上における車両の位置も示す。現在は、これらのシステムは、運転者が自分の現在位置を常に追跡することを可能にし、行き先に到着する上での最良のルートを提案する。
【0065】
位置特定は、緊急時における携帯電話の位置を決定することに関して及び所在位置に基づくサービスに関して役立つ。米国におけるセルラー位置特定の展開は、連邦通信委員会(FCC)拡大9−1−1命令によるものである。該命令では、ネットワークに基づくソリューションに関しては、67%の呼に関して100mの精度であること、95%の呼に関しては300mの精度であること、ハンドセットに基づくソリューションに関しては、67%の呼に関して50m、95%の呼に関して150mであることを要求している。緊急呼が開始されると、緊急サービス調整センター−緊急通報センター(PSAP)は、MLCにおいて計算された位置を利用する。欧州及びアジアでは、位置情報サービス(LBS)によって促進されているが、これらの地域では、緊急サービスセルラー位置特定に関する要求事項が確立されているか又は確立中である。
【0066】
全地球的航法衛星システム(GNSS)
Assisted−GNSS(A−GNSS)は、“拡大”又は“拡張”GNSS(E−GNSS)とも呼ばれ、GPSに加えてその他の衛星航法システムに概念を拡大している。例えば、10年以内に、GPS、GLONASS、ガリレオ、及びその他の衛星を含む80のGNSS衛星が地球軌道上を周回し、各システムに関する異なる基準に基づいて様々な信号を送信することになる可能性がある。この結果、受信機(移動型又は固定型を問わない)がこれまでよりもはるかに多くの衛星及び送信信号にアクセス可能になり、位置決定の精度及び歩留まりの両方を向上させることが可能になる。より多く衛星ということは、位置精度が衛星ジオメトリの影響をこれまでより受けにくいことを意味し、位置計算を行うときにより大きい冗長性を提供する。
【0067】
単純化されたGNSSアーキテクチャが図1に示される。セルラーシステム12、又はその他の型の広域基準ネットワーク(WARN)は、無線ネットワークの地理上のカバレッジエリア上空に配置されるGNSS受信機のネットワークである。セルラーシステム12は、ブロードキャスト航法メッセージをGNSS衛星から受信し、該メッセージをキャッシングのためにA−GNSSサーバー(例えば、PDE 26)に提供する。移動局31が緊急コールをするか又は位置特定を要求するサービスが呼び出され、A−GNSSサーバーにメッセージが送信される。PDE26は、1つ以上の基地局22乃至24の位置を用いて要求されるGNSS援助データを概算位置として計算として移動局31に提供する。
【0068】
基準
A−GPSサーバーの異なる構成要素が3GPP TS 23.271、TS43.059及びTS25.305において定義されている。サービングモバイルロケーションセンター(SMLC)が無線ネットワークの一部として配備され、その目的は、ネットワーク内におけるハンドセットの位置を決定することである。
【0069】
SMLCはGSM/GPRSネットワークにおいて実行し、UMTSネットワークにおいてはスタンドアロンSMLC(SAS)、ユーザープレーンソリューションにより異なる無線アクセス型をサポート時にはSUPLロケーションプラットフォーム(SLP)と呼ばれる。SMLCは、すべてのハンドセットに基づく及びネットワークに基づく無線位置特定方法をサポートすることができ、ハンドセットに基づくバージョン及びハンドセットによる補助バージョンの両バージョンにおけるA−GPSを含む。
【0070】
ハンドセットによるA−GPSメッセージ送信のためのプロトコルをサポートする仕様(すなわち基準)が数種類存在する。GSMネットワークは、RRLP仕様を用いる。UMTSネットワークは、無線資源制御(RRC)仕様を用いる。CDMAネットワークは、TIA IS−801仕様及び3GPP2 C.S0022仕様を用いる。これらの仕様の各々は、同じ基本情報を符号化するための異なる方法を規定しているが、採用された無線技術専用である。本説明は、RRLP仕様の修正例(例えば選択肢)について説明するものであるが、RRC仕様、IS−801及びC.S0022仕様又はその他のいずれかの仕様を修正して同じ又は同様の効果を達成させるようにすることが可能である。
【0071】
RRLP仕様は、測位命令及び可能な場合の援助データを移動局31に提供する測位要求メッセージ36(図1)と、移動局31からの移動局31位置推定値又は疑似距離測定値をセルラーシステム12に提供する測位応答メッセージ37(図1)と、を含む。RRC仕様、IS−801/C.S0022仕様又はその他のいずれかの仕様は、同じ又は同様の効果を達成させるための要求及び/又は応答メッセージを含むことができる。
【0072】
RRLP測位メッセージを修正するための4つの選択肢
図2は、本発明の一側面による、RRLP仕様に関するRRLP測位要求メッセージ36(図1参照)及びRRLP測位応答メッセージ37(図1参照)を修正するための4つの選択肢を表す表Aを示す。表Aにおいては、RRLP測位要求メッセージ36及びRRLP測位応答メッセージ37は、表1及び表2において現RRLP仕様に関してそれぞれ表されている。選択肢1は、表3及び4において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢2は、表5及び6において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢3は、表7及び8において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢4は、表9及び10において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。
【0073】
選択肢1は、ガリレオ/GNSSを新たな衛星位置特定方法として導入する。
【0074】
選択肢2は、“GNSS位置特定方法”を導入し、様々な衛星群(GPS、ガリレオ、及び潜在的な将来の衛星航法システム又は衛星増強システム)の詳細を新しいGNSS情報要素においてカプセル化する。
【0075】
選択肢3は、特定の衛星群のインタフェース制御ドキュメント(ICD)と無関係の“GNSS位置特定方法”を導入する。
【0076】
選択肢4は、各々の選択肢1、2、及び3を評価及び比較後に選択肢2及び選択肢3の利点の組合せを導入する。
【0077】
選択肢1、2、及び3は、ガリレオ/GNSSをどのような方法でRRLP仕様に追加可能であるかについて説明されている。
【0078】
測位要求メッセージ及び測位応答メッセージの修正方法
図3は、本発明の一側面により、4つの選択肢のうちの1つに従って現在のRRLP仕様に関するRRLP測位要求メッセージ36及びRRLP測位応答メッセージ37を修正するための方法38を示す。ブロック50において方法38が開始する。ブロック51において、方法38は、RRLP測位要求メッセージ36を識別する(例えば表1)。ブロック52において、方法38は、選択肢1(例えば表3)、選択肢2(例えば表5)、選択肢3(例えば表7)、又は選択肢4(例えば表9)に従ってRRLP測位要求メッセージ36(例えば表1)を修正する。ブロック53において、方法38は、RRLP測位要求応答メッセージ37を識別する(例えば表2)。ブロック54において、方法38は、選択肢1(例えば表4)、選択肢2(例えば表6)、選択肢3(例えば表8)、又は選択肢4(例えば表10)に従ってRRLP測位応答メッセージ37(例えば表2)を修正する。
【0079】
表3、5、7、及び9の各々は、選択肢1、2、3、及び4に関する修正されたRRLP測位要求メッセージをそれぞれ表し、表1に示される現在のRRLP測位要求メッセージの要素と、第2のGNSSシステム(例えば、ガリレオ)をサポートする新しい要素60と、を含む。表4、6、8、及び10の各々は、選択肢1、2、3、及び4に関する修正されたRRLP測位応答メッセージをそれぞれ表し、GNSSシステム(例えば、ガリレオ)に関する新しい要素60と同様に、表2に示される現在のRRLP測位応答メッセージの要素を含む。参照番号60は、一般的には、表3乃至10の各々における新しい要素を一般的に識別するが、これらの表の各々における新しい要素は異なることができる。表3乃至10の各々においては、現在の要素が最初に示されて新しい要素が後続するが、このことは必須事項ではない。従って、各々の表3、5、7、及び9の最初は表1と同じであり、表1の要素を含み、各々の表4、6、8、及び10の最初は表2と同じであり、表2の要素を含む。
【0080】
現在のRRLP測位要求メッセージ及び応答メッセージ
図4は、本発明の一側面による、現在のRRLP仕様に関するRRLP測位要求メッセージ36を表す表1を示す。図5は、本発明の一側面による、現在のRRLP仕様に関するRRLP測位応答メッセージ37を表す表2を示す。
【0081】
図4及び5は、アシステッド−GPS(A−GPS)に関するRRLP仕様において現在説明されるRRLP測位要求メッセージ及びRRLP測位応答メッセージをそれぞれ例示し、RRLP仕様へのガリレオの導入のための変更を示す。RRLP仕様(TS44.031)は、主GERAN仕様であり、ガリレオ/GNSSをサポートするために修正する必要がある。RRLP仕様は、測位命令及び援助データ要素の詳細を含む。
【0082】
RRLP仕様は、測位命令及び可能な場合の援助データを移動局31に提供する測位要求メッセージと、移動局31からの移動局31位置推定値又は疑似距離測定値をセルラーシステム12に提供する測位応答メッセージと、を含む。
【0083】
ガリレオ/GNSSの導入に関して必要な変更が、表1及び2の右端の列において要約される。右端の列内が空欄である場合は、変更が要求されないことを示す。右端に示される変更は、特定の選択肢(すなわち、選択肢1乃至4)のみを対象にしたものではなく、いずれの既存のA−GPSパラメータを再使用可能であるか又は交換、拡大又はその他の形での修正を行う必要があるかを示す。幾つかの場合においては、幾つかのパラメータ変更を最終決定できるようになる前にガリレオに関する追加情報が必要になる(最終仕様)。
【0084】
表1と2、及び表3乃至10の各々において、“>”シンボル数は、ASN.1符号化内におけるフィールドの階層レベルを示す。
【0085】
選択肢1−新しい位置特定方法“ガリレオ”
図6及び7は、本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示す。図8及び9は、本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示す。
【0086】
選択肢1において、表1に示されるように、A−GPSと同様に、新しいガリレオ要素60が現在のRRLP仕様に追加される。現在のA−GPS専用情報要素が引き続き用いられ、新しいガリレオ専用情報要素60が追加される。
【0087】
RRLP仕様に関する修正は、例えばリリース7拡張コンテナ内において新しい情報要素を導入することであり、測位要求メッセージ及び測位応答メッセージに関するそれぞれの表3及び4において要約される。
【0088】
選択肢1は、幾つかの方法で実装することができ、表3及び4は一例を説明する。
【0089】
選択肢1の利点は、以下の項目を含む。
【0090】
1. 現在のRRLPプロトコルが直線的に展開される。既存のA−GPS情報要素が、結合されたGPS−ガリレオ受信機に関して依然として用いられる。A−GPS専用受信機は、既存のA−GPS情報要素を引き続き使用し、ガリレオ専用受信機は、新しく追加された情報要素のみを用いるか又は新しく追加された情報要素をほとんどの場合に用いる。
【0091】
2. 既存のプロトコル及びA−GPS実装の後方互換性が保持される。既存のA−GSP実装(SMLC及びMS)は、ガリレオの導入による影響を受けない。
【0092】
3. 従来の及びアシステッドGNSSモードは、異なるユーザーアルゴリズムを要求しない。
【0093】
選択肢1の難題は、以下の項目を含む。
【0094】
1. 援助データ要素はICD専用である。従って、最終的なガリレオICDが利用可能になる前にすべての要求されるガリレオ援助データ要素を定義することができない可能性がある。
【0095】
2. 一般的手法でない。新しいGNSSシステムを追加しなければならなくなるごとに、仕様を適宜修正しなければならない。
【0096】
選択肢2−新しい位置特定方法“GNSS”
図10及び11は、本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示す。図12及び13は、本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示す。
選択肢2においては、新しい位置特定方法“GNSS”が導入され、GPS及び/又はガリレオ専用情報要素がGNSS情報要素においてカプセル化される。
【0097】
RRLP仕様に関して要求される修正は、例えばリリース7拡張コンテナ内において新しい情報要素を導入することであり、測位要求メッセージ及び測位応答メッセージに関するそれぞれの表5及び6において要約される。
【0098】
選択肢2は、幾つかの方法で実装することができ、表5及び6は一例を説明する。表5及び6に示される例は、GPS及びガリレオに関しては共通のASN.1符号化が可能であると仮定する提案に従ったものである。
【0099】
選択肢2の利点は以下の項目を含む。
【0100】
1. 選択肢2の結果として、同じGNSSシグナリングを共有する上でGPS及びガリレオと十分な適合性を有することを条件として、RRLPにおいて新しいGNSSシステムに関する追加のASN.1符号化を少なくすることができる。
【0101】
2. 従来の及びアシステッドGNSSモードは、異なるユーザーアルゴリズムを要求することができない。
【0102】
選択肢2の難題は以下の項目を含む。
【0103】
1.RRLPにおいて2つの分枝(branch)が生成される。現在のA−GPS実装は、既存の情報要素を引き続き使用することになり、将来のGPS/ガリレオ実装(SMLC及びMS)は、既存のA−GPS情報要素及び新しいGNSS情報要素の両方をサポートしなければならない。端末及びSMLCがGNSSに関する能力を有する場合は、A−GPS専用である場合においても新しいGNSS情報要素のみを用いることができる。しかしながら、すべてのネットワーク内のすべてのSMLCが両方のプロトコル分枝をサポートするわけではないため、GNSSに関する能力を有する端末は、依然として既存のA−GPS情報要素も同様にサポートしなければならない(例えば、GNSSがリリース7に追加されると仮定した場合は、すべてのSMLCがリリース7をサポートするまでは、新たなリリース7に関する能力を有する端末はリリース6もサポートしなければならない。
【0104】
2.A−GPS関連情報要素は、既存のRRLP及び新しいGNSS分枝において2回定義される。
【0105】
3. 援助データ要素はICD専用であるが、共通のASN.1符号化を有する。共通のASN.1符号化は、実行可能でない場合がある。
【0106】
4. この選択肢を用いる将来の航法システム及び増強システムがGPS及びガリレオと十分な適合性を有さない場合は、これらの将来のシステムを追加することは困難又は不可能な場合がある。その場合は、異なる選択肢(例えば、選択肢1又は選択肢4)に戻ることが必要になる場合がある。
【0107】
選択肢3−いずれのICDからも独立した新しい位置特定方法“GNSS”
図14は、本発明の一側面による、選択肢3に従った修正されたRRLP測位要求メッセージを表す表7を示す。図15及び16は、本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示す。
【0108】
選択肢3は、選択肢2と同様である(すなわち、新しい測位方法“GNSS”が導入される)が、この手法は、衛星群データの点に加えて構造の点でも一般的であることが維持される。援助データ要素及び測定結果は、いずれのICDについても専用にならない。
【0109】
衛星航法データを用いるか又はA−GPS概念を再度用いるか又は拡張する代わりに、A−GNSS能力を有する端末に関して測位援助データが特に生成される。例えば、GPS又はガリレオエフェメリスパラメータとは無関係に航法モデルが符号化され、中高度地球周回軌道(MEO)衛星に関する軌道モデルで十分になる。時間は、GPS又はガリレオ曜日(TOW)から独立しており、例えば、世界標準時座標(UTC)を用いることが可能である。
【0110】
RRLPにおいては、選択肢3は、選択肢2と同様にみえるが、個々の衛星群を明確に区別する必要がない。GPS/ガリレオ受信機は、GPS及びガリレオ専用信号を測定することを可能にする必要があるため、異なる衛星群を多少区別する必要が依然としてある。表7及び8において一例が概説される。すべての追加要素に関する詳細を新たに定義する必要があり、特定のICDは参照されない。
【0111】
選択肢3の利点は、以下の項目を含む。
【0112】
1. プロトコルの観点からは一般的な手法である。移動局受信機は、援助データを受信して測定値を戻す観点からGPS及びガリレオ衛星群を単一のGNSSとみなす。
【0113】
2. 援助データ要素は、特定のICDに依存しない。将来のシステムは、仕様に関して最低限の変更が要求されるか又はまったく要求されない形でサポートされる。
【0114】
選択肢3の難題は、以下の項目を含む。
【0115】
1. RRLPにおいて2つの分枝が生成される。現在のA−GPS実装は、既存の情報要素を引き続き使用することになり、将来のGPS/ガリレオ実装(SMLC及びMS)は、既存のA−GPS情報要素及び新しいGNSS情報要素の両方をサポートしなければならない。端末及びSMLCがGNSSに関する能力を有する場合は、A−GPS専用である場合においても新しいGNSS情報要素のみを用いることができる。しかしながら、ネットワーク内のSMLCが両方のプロトコル分枝をサポートすることは保証できないため、GNSSに関する能力を有する端末は、依然として既存のA−GPS情報要素をサポートしなければならない(例えば、GNSSがリリース7に追加されると仮定した場合は、SMLCがリリース7をサポートするまでは、新たなリリース7に関する能力を有する端末はリリース6もサポートしなければならない)。
【0116】
2. この手法を真に一般的な手法として維持するためには新しい共通の軌道モデル及び新しい測地学的基準フレームを定義することが必要になる場合がある。既存のA−GPSユーザーアルゴリズムをこれ以上用いることができない可能性がある。新しいGNSSプロトコルは、既存のA−GPS実装とは適合しない。
【0117】
3. 従来のGNSS実装及びアシステッドGNSS実装は異なることになる。従来のモード及び援助モードに関する異なるユーザーアルゴリズムが必要になることがある。従来のモードは、今後は援助モードの特殊ケースであるとみることはできない。
【0118】
新選択肢4−既存のGPSユニット及びフォーマットを使用するガリレオの追加
図17及び18は、本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示す。図19及び20は、本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示す。
【0119】
選択肢2及び選択肢3の難題のうちの1つは、RRLPにおいて新しいプロトコル分枝を導入することであり、A−GPSのサポートに関して2つの異なるプロトコルフォーマットが存在することになることを意味する。従って、ガリレオの導入は、最終的にはA−GPS専用実装に対しても影響を有する可能性がある。他方、選択肢2及び選択肢3は、一般的であることを試み、“全地球的航法衛星システム(GNSS)”の概念を導入する。選択肢3は、特定のICDから独立しており、従って将来の衛星システムは仕様を最低限変更するだけで又は仕様を変更する必要なしにサポートされるという利点も有する。
【0120】
選択肢4は、選択肢1、2、及び3の利点を結合させ、選択肢1、2、及び3と関連するほとんどの難題を回避する代替手法について説明するものである。
【0121】
選択肢4においては、ガリレオ又はその他のGNSSシステムは、既存のA−GPS情報要素を用いて追加される。新しいガリレオ(又はその他のGNSS)専用の情報要素(例えば、選択肢1及び2)又は新しいGNSS情報要素(例えば、選択肢3)を定義する代わりに、新しいガリレオ専用SV−IDを導入することによってガリレオ宇宙ビークル(SV)に関しても既存のA−GPS情報要素が用いられる。既存のSV−ID1−64は、GPS衛星専用で用いられ、追加のSV−ID、例えば65乃至128は、ガリレオ用に予約される。将来の衛星航法システムが容易に追加できるようにするための十分な追加のSV−IDが定義される。
【0122】
ガリレオ及び構想される将来の情報要素は、メートル、秒、ラジアン、Hz、等に変換することができ、これらは、既存のGPS単位又はフォーマットに変換することができる。変換は、情報要素の送信機及び受信機の両方において同じように適用される適切に定義された共通の仮定事項に基づく。既存のGPS情報要素パラメータは適合可能な衛星システムを網羅する適切な範囲を有するため、該変換が可能である。
【0123】
新しいガリレオSV−IDに関する時間に依存する援助データは、GPS時間に変換することができ(選択肢4a−以下の仮想GNSS時間を参照)、又はGPSからガリレオ時間オフセット(GGTO)への変換パラメータとともにガリレオ時間を用いることができる(選択肢4b)。SMLC(選択肢4a)又はMS(選択肢4b)のいずれかが、共通GPS時間枠への変換を実施する。
【0124】
RRLP ASN.1における既存のSV−IDは拡張不能であるため、将来のGNSS又は増強システムの追加を許容する、例えば最大で255(又は511又は1023)のIDを網羅する新しい“追加のSV−ID”を定義する必要がある。SVに依存するすべての既存のGPS援助データは、64よりも大きいSV−IDに関して適用可能な“追加援助データ”IEにおいて定義される。“追加援助データ”IEの符号化は、GPSに関する現在の援助データIEとまったく同じである。従って、既存のプロトコル及び実装に対する影響は最小限であるが、この手法は依然として一般的である。
【0125】
IS−801−B等のその他のロケーションプロトコルは、SV−ID用の十分な予備ビットを既に有する。従って、該ロケーションプロトコルでは“追加援助データ”IEは必要にならず、既存のロケーションプロトコル及び実装への影響をさらに低減させる。
【0126】
選択肢4を実装することが可能な場合が幾つか存在する。表9及び10に示される例は、1つの可能例であるにすぎない。幾つかの新しいASN.1符号化は、RRLPセグメントを生成するための規則を規定することによって回避することができる。例えば、新しい衛星群IDパラメータ(又は可能な場合のSV ID増分)は、衛星群専用データを含むあらゆるRRLP構成要素内に含めることができる。従って、2つ以上の衛星群に関するデータは、同じRRLP構成要素内には含められない。このことは、衛星群に関する既存のGSP ASN.1パラメータの再使用を可能にし、新たなASN.1の定義を回避する。
【0127】
選択肢4の利点は、以下の項目を含む。
【0128】
1.一般的手法であるが、既存のプロトコル及び実装と依然として適合可能である。ユーザー受信機は、(援助データを受信して測定値を戻す観点から)GPS及びガリレオ衛星群を単一のGNSSとみなす。
【0129】
2.現在のプロトコルを発展させたものである。結合GPS−ガリレオ受信機に関して既存のA−GPS情報要素が依然として用いられる。
【0130】
3.既存のプロトコル及びA−GPS実装の後方互換性が確保される。既存のA−GPS実装は、ガリレオの導入による影響を受けない。
【0131】
仮想GNSS時間
本発明は、GPS及びガリレオ(又はその他のいずれかの衛星航法システム又は増強システム)において用いられる異なる航行タイムスケールを取り扱うように適合化された通信システム、方法及び装置を含む。
【0132】
本発明の諸側面が図1及び21を参照して説明される。本発明の一側面により、ロケーションサーバー26(例えば、3GPPにおけるSMLC)は、“仮想GNSS”時間を維持して仮想GNSS時間をモバイル受信機31に通信するように適合化される。仮想GNSS時間は、移動局31がGPS及びガリレオ衛星群を単一の全地球的航法衛星システム(GNSS)であると“みる”ことを可能にする。従って、移動局31は、GPS又はガリレオ観測結果をGGTOに関して補正する必要がない。本発明の改良点は、既存の移動局の性能を向上させ、新しい移動局に関連するコストを低減する。
【0133】
ロケーションサーバー26は、GGTOを移動局31に提供する代わりに、航法モデル及びクロック補正援助を移動局31に提供するときにGGTOを考慮に入れる。動作上は、移動局31は、GPS及びガリレオブロードキャストからのクロック補正を利用せず、むしろロケーションサーバー26によって計算されて仮想GNSS時間を参照するクロック補正を利用する。
【0134】
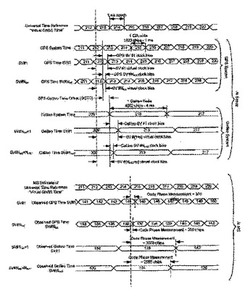
図21は、仮想GNSS時間の計算において使用可能なタイミング図を示す。異なる航法システムを区別するために図21の異なる地域が用いられる。図21の上部分は、衛星(例えば、GPS及びガリレオ)における時間を示し、下部分は、移動局31における時間を示す。
【0135】
一例として、GPSシステム時間は、1ミリ秒の倍数で示される。各GPS衛星は、GPSシステム時間から一定のオフセットを有する自己のクロックを有する。このオフセットは、図21においては、“GPS SV#1クロックバイアス”及び“GPS SV#Nsatクロックバイアス”として示される。GPSクロックバイアスは、移動局31においては、セルラーネットワーク12から受信されるか又はGPSブロードキャスト航法メッセージを復号することによって入手されたクロック補正パラメータを用いて計算することができる。
【0136】
図21の上部分にはガリレオタイミング図も示される。ガリレオオープンサービスは、4ミリ秒の符号を使用し、従ってガリレオシステム時間は4ミリ秒の倍数で示される。GPSの動作におけるのと同じように、各衛星は、ガリレオシステム時間からの一定のオフセットを有する自己のクロックを有する。このオフセットは、図1においては、“ガリレオSV#1クロックバイアス”及び“ガリレオSV#Nsat2クロックバイアス”として示される。ガリレオクロックバイアスは、移動局31においては、GPSクロックバイアスを参照して上述されるように、ガリレオクロック補正パラメータを用いて計算することができる。
【0137】
上述されるように、GPS及びガリレオシステム時間は、独立した時間枠である。従って、図21において“GPS−ガリレオ時間オフセット(GGTO)”で表されてGPSタイムラインとガリレオタイムラインとの間において示される2つのシステム時間の間にオフセットが存在する。図21の例においては、このGGTOは1ミリ秒未満であること及びGGTOにおいては整数秒数は無視されると仮定される。
【0138】
上述されるように、GPS及びガリレオ衛星信号測定値を位置計算に関して用いる移動局31は、次の入力、すなわち、GPSエフェメリス及びGPSクロック補正パラメータ、ガリレオエフェメリス及びガリレオクロック補正パラメータ、及びGPS−ガリレオ時間オフセット(GGTO)を有することが必要になる。
【0139】
幸運なことに、本発明の諸側面は、移動局31によって受信されるデータ量及び移動局31によって要求される処理量を簡素化する。ロケーションサーバー26は、移動局31にGGTOを通信する代わりに、仮想GNSS時間を決定し、仮想GNSS時間に関するGPS及びガリレオクロック補正パラメータを計算することができる。仮想GPSS時間は、あらゆる適切な時間ベース、例えばUTC又はセルラー時間(又は、特殊ケースとして、GPS又はガリレオ時間)であることができる。仮想GNSS時間を用いることで、移動局31は、GPS又はガリレオ疑似距離を区別する必要がなく、従って上記の衛星ジオメトリに関わりなく一様に動作する。ロケーションサーバー26によって決定された場合の仮想GNSS時間が図21の最上部に示される。
【0140】
ロケーションサーバー26は、仮想GNSS時間とGPS及びガリレオシステム時間との間におけるオフセットを決定するようにさらに適合化される。GNSSクロック補正パラメータは、ロケーションサーバー26によって、既知のGPS及びガリレオクロック補正、さらにはGGTO及び仮想GNSS時間とGPS又はガリレオ時間との間におけるオフセットを用いて計算される。
【0141】
図1の下部分は、ユーザー受信機におけるタイミングを示す。MSは、GPS及びガリレオ符号位相測定を通常どおり行う。GPS及びガリレオ衛星は、例えば3GPPによって定義されたSV番号等の定義済みのSV番号を有することができる。例えば、GPS衛星の各々には、#1乃至#Nsatの番号を付けることができ、ガリレオ衛星の各々には、#Nsat+1乃至#Nsat2の番号を付けることができ、これらの番号は、3GPPの衛星番号SV#1乃至#Nsat+Nsat2に有効な形で変換される。移動局31は、正確なレプリカ符号との相互関連づけを行うためにいずれのSV番号がGPS及びガリレオ衛星にそれぞれ属するかを認識するように適合化することができる。
【0142】
個々の符号−位相測定値は、従来の方法で衛星送信時間に変換され、疑似距離測定値を計算するために用いることができる。SViまでの疑似距離ρiの定義は、方程式1において定義される。
【0143】
ρi(n)=c(TR(n)−Tn(n)) (1)
ここで、cは、伝搬定数(光の速度)であり、TR(n)は、受信機のクロックのエポックnに対応する受信時間であり、Tn(n)は、SViクロックに基づく送信時間である。
【0144】
衛星によって送信されたPRN符号が、該PRN符号とレプリカPRN符号を相互に関連させるように適合化された移動局31に到着時には、GPS又はガリレオ週の始まりに関するレプリカ符号の符号位相オフセットは、SViの送信時間を表す。図1の例(下側の“MSにおいて”を用いた場合、SV#1(“観測されたGPS時間SV#1”までの符号位相測定は、約370チップであり、この特定の衛星に関する送信時間は、方程式2において以下のように計算される。
【0145】
TTSVi =145ms−370のGPSチップ (2)
同様に、図1に示されるその他の3つの衛星測定例に関する送信時間は、以下のよう計算することができる。
【0146】
TTSVNsat =137ms−200のGPSチップ (3)
TTSVNsat+1 =142ms−3070のガリレオチップ (4)
TTSVNsat+Nsat2 =138ms−2995のガリレオチップ (5)
1つのGPS又はガリレオチップに関する継続時間は、約977ナノ秒である。図1の例における受信時間は、215msであり、従って、この例を用いた近似的な疑似距離は、以下に示されるとおりである。
【0147】
ρSV1≒c(215−144.6)≒c・70.4ms (6)
ρSVNsat≒c(215−136.8)≒c・78.2ms (7)
ρSVNsat+1≒c(215−139)≒c・76ms (8)
ρSVNsat+Nsat1≒c(215−135.1)≒c・79.9ms (9)
すべての衛星送信時間は、上述されるように、真のGPS又はガリレオ時間に関するバイアス誤差を含む(例えば、“GPS SV#1クロックバイアス”又は“ガリレオSV#1クロックバイアス”)。従来のGPS及び/又はガリレオ受信機処理においては、上記の衛星送信時間は、航法ブロードキャストメッセージから又はセルラー援助データから入手されたクロック補正パラメータを用いて航法プロセスにおけるこのGPS及びガリレオクロックバイアスに関して補正される。疑似距離は、通常は、大気遅延(例えば、電離層及び対流圏)及びその他の共通バイアス(例えば相対論的影響)に関してさらに補正される。
【0148】
従来の航法アルゴリズムは、GPS又はガリレオ疑似距離を使用し、移動局31の三次元位置及び移動局31クロックバイアス(すなわち、GPS又はガリレオシステム時間からの受信機のローカルクロックのオフセット)に関する解を求める。従って、(GPS+ガリレオ疑似距離を用いた)従来の結合GPS/ガリレオ航法処理においては、移動局31は、1つはGPS時間に関する受信機クロックバイアス、1つはガリレオ時間に関する受信機クロックバイアスの2つの受信機クロックバイアスを取り扱わなければならない。さらに、従来の結合GPS/ガリレオ航法処理においては、GPS及びガリレオ衛星までの疑似距離は、移動局31において別々に処理する必要がある。GPS及びガリレオ衛星までの疑似距離がバイアス誤差に関して補正された時点で(クロック補正及びその他)、GPSシステム時間とガリレオシステム時間との間の差を考慮に入れなければならない。GPS及びガリレオ疑似距離を従来の航法アルゴリズムにおいて用いることができるようになる前に2つのシステム間の時間オフセット(GGTO)に関してGPS又はガリレオ疑似距離のいずれかを補正しなければならない。
【0149】
しかしながら、本明細書において説明される仮想GNSSクロック補正パラメータに従い、結合GPS/ガリレオ受信機に関して既存の従来の航法処理を用いることができる。GPSクロック補正をGPS疑似距離測定値に適用してガリレオクロック補正をガリレオ疑似距離測定値に適用し、GGTOをGPS又はガリレオ疑似距離に適用する代わりに、共通のGNSSクロック補正が用いられ、GGTOに関する補償を移動局31において行う必要がない。従って、移動局31における既存の航法処理手順を結合GPS/ガリレオ測定値に関して用いることができる。すなわち、移動局31は、ガリレオ疑似距離を、まさに追加のGPS疑似距離であると“みなし”、逆に、GPS疑似距離を追加のガリレオ疑似距離であると“みなす”。
【0150】
本発明のさらなる詳細が、以下において本発明の一定の側面により使用可能な計算例を用いて説明される。
【0151】
以下の例においては、GPS送信時間tgpsは、以下によって与えられる。
【0152】
tgps=tsvigps−Δtsvigps (10)
ここで、tsvigpsは、送信時の有効GPS SVi符号位相時間であり、Δtsvigpsは、GPSクロック補正パラメータを用いて計算されたGPS SVi符号−位相時間オフセットである(図1の“GPS SV#iクロックバイアス”)。同様に、ガリレオ送信時間tgalileoは、以下によって与えられる。
【0153】
tgalileo=tsvigalileo−Δtsvigalileo (11)
ここで、tsvigalileoは、送信時の有効ガリレオSVi符号位相時間であり、Δtsvigalileoは、ガリレオクロック補正パラメータを用いて計算されたガリレオSVi符号−位相時間オフセットである(図1の“ガリレオSV#iクロックバイアス”)。
【0154】
GPSシステム時間とガリレオシステム時間との間のオフセット(GGTO)は、以下によって与えられる。
【0155】
tgps−tgalileo=tggto (12)
ここで、GGTOの符号は、規約事項である。GPSΔtsvigpsとガリレオΔtsvigalileoクロック補正、及びGGTOtggtoを移動局31に提供する代わりに、ロケーションサーバー26は、以下に示されるように仮想GNSS時間tgnssに関するGNSSクロック補正パラメータΔtsviを計算するように適合化される。
【0156】
tgps−tggnss=Δtgps−gnss (13)
ここで、Δtgps−gnssは、GPSシステム時間と仮想GNSS時間との間のオフセットであると定義される。これで、GPS衛星及びガリレオ衛星の各々に関してロケーションサーバー26によってGNSS専用クロック補正パラメータを以下のように計算することができる。
【0157】
GPS SViに関しては、ロケーションサーバー26は以下を計算するように適合化される。
【0158】
Δtsvi=Δtgps−gnss+ΔtSVigps (14)
ガリレオSViに関しては、ロケーションサーバー26は以下を計算するように適合化される。
【0159】
Δtsvi=Δtgps−gnss+Δtggto+ΔtSVigalileo (15)
ここで、Δtsviは、仮想GNSSクロック補正である。ΔtSVigps、ΔtSVigalileo及びtggtoに関する値は、ロケーションサーバー26においてGPS及びガリレオブロードキャストメッセージから入手可能であり、Δtgps−gnssに関する値は、上記されるようにロケーションサーバー26によって決定される。
【0160】
GNSSクロック補正パラメータΔtsviは、各GPS及びガリレオ衛星に関してロケーションサーバー26によって計算し、援助データメッセージにおいて一定のパラメータの形態で移動局31に提供することができる。例えば、GNSSクロック補正パラメータは、GPS及びガリレオデータメッセージの両方において慣例的である多項式係数として移動局31に提供することができる。
【0161】
本発明の様々な側面により、移動局31は、航法処理においてGPS衛星とガリレオ衛星を直接区別しない。両衛星群は、疑似距離計算に関して単一のGNSSとして取り扱われる。結合された衛星群における1つ以上の衛星を識別するために、標準化されたGNSS SVIDを各GPS衛星及びガリレオ衛星に割り当てることができる。例えば、GPS衛星は、標準化された識別GNSS SV IDi=1乃至64を通じて識別することができ、ガリレオ衛星は、標準化された番号GNSS SV IDi=65乃至128を通じて識別することができる。移動局31は、各GNSS SV IDiによっていずれのGPS又はガリレオPRN符号が用いられるかを認識するようにさらに適合化することができる。
【0162】
移動局31は、単一の衛星群に関して現在行われているのと同じ形で、各衛星測定に関するGNSS送信時間を計算するようにさらに適合化することができる。しかしながら、当業とは異なり、本発明の側面例の移動局31は、GPS又はガリレオ送信時間を直接区別する必要がない。GNSS送信時間は、以下のように計算することができる。
【0163】
tgnss =tsvi−Δtsvi (16)
ここで、tsviは、送信時の有効GNSS(GPS又はガリレオ)SVi符号位相であり、Δtsviは、上記において定義された、GNSSクロック補正パラメータ(図21における“SV#i仮想クロックバイアス”)を用いて計算されるGNSS SVi符号−位相時間オフセットである。
【0164】
本発明の他の側面においては、ロケーションサーバー26は、援助データを移動局31に提供するように適合化することができる。援助データは、例えば、可視GNSS SV IDのリストと、対応するGNSSエフェメリスパラメータ(GPS及びガリレオ専用パラメータであることができる)と、仮想GNSS時間と、GNSSクロック補正と、を含むことができる。
【0165】
本発明の他の側面においては、移動局31は、各GNSS SV IDi専用のレプリカ符号を生成してGNSS符号位相を測定するように適合化することができる。符号位相測定値は、仮想GNSS時間推定値による時間タグが付される。仮想GNSS時間は、通常はGPS又はガリレオ信号から直接入手することはできないため、上述される援助データメッセージ内において移動局31に提供することが可能である。1つの適切な手法は、ネットワーク内の例えば位置測定ユニット(LMU)を用いてロケーションサーバー26によって入手されたGNSS−セルラー時間関係の推定値をユーザー受信機に提供することである。これらのLMUは、定期的にセルラー時間と仮想GNSS時間との間の関係を測定し、これらの測定値をロケーションサーバー26に提供する。ロケーションサーバー26は、これらの時間関係のデータベースを維持し、援助データメッセージにおいてGNSS−セルラー時間関係を移動局31に提供する。LMUは、専用ネットワーク要素であること、又はこのLMU機能が実装された移動局であることができる。
【0166】
本発明の他の側面においては、仮想GNSS時間は、等しいGPS又はガリレオ時間に設定することができる。例えば、GPS時間が仮想GNSS時間として用いられる場合は、ロケーションサーバー26における方程式(14)及び(15)に従ったGNSSクロック補正パラメータの計算が単純化される。この例においては、GPSシステム時間と仮想GNSS時間との間におけるオフセットΔtgps−gnssは、ゼロになる。この例においては、GPS及びガリレオによってブロードキャストされたクロック補正パラメータ(ΔtSVigps、ΔtSVigalileo、tggto)のみが、ロケーションサーバー26においてGNSSクロック補正を計算するために必要になり、移動局31における既存の時間復元アルゴリズムを用いて、例えばGPS衛星信号を復号することから仮想GNSS時間を入手することができる。
【0167】
GPS時間を仮想GNSS時間として用いることは、上述される選択肢4が既存のA−GPSロケーションプロトコル(例えば上述されるRRLP)におけるガリレオ(又はその他のGNSS)の追加に関して用いられるときに特に有利になる。既存のA−GPS情報要素は、ガリレオ援助データを提供するために用いられる。ガリレオ時間に依存する援助データは、上述されるようにGPS時間に変換される(すなわち、GPS時間が仮想GNSS時間として用いられる)ため、既存のGPS情報要素は、ガリレオ関連データを移動局31に搬送するために用いることができる。
【0168】
GPS時間を仮想GNSS時間としてA−GPSに関する既存のロケーションプロトコルとともに用いることによって(すなわち、選択肢4)、GPS及びガリレオ(又はいずれかの追加GNSS)は、単一の航法衛星システムとして取り扱われる。移動局は、異なる航行時間枠を処理する必要がなく、上述されるようなGGTO関連問題による影響を受けない。ガリレオ(又はその他のいずれかのGNSS)衛星は、移動局31において追加のGPS衛星としてみられることになる。従って、既存のA−GPS実装及び追加GNSSのサポート基準に対する影響は、最小限になる。
【0169】
代替実装
本明細書に含まれるシステム、要素、及び/又はプロセスは、ハードウェアにおいて、ソフトウェアにおいて、又はその組合せにおいて実装することができ、1つ以上のプロセッサを含むことができる。プロセッサは、タスクを実行するためのデバイス及び/又は一組の機械によって読み取り可能な命令である。プロセッサは、プロセスを具体化した一連の命令を実行する能力を有するあらゆるデバイスであることができ、限定されることになしに、コンピュータ、マイクロプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、有限ステートマシン、デジタル信号プロセッサ(DSP)、又はその他の何らかのメカニズムを含む。プロセッサは、ハードウェア、ファームウェア、及び/又はソフトウェアのあらゆる組合せを含む。プロセッサは、格納された及び/又は受信された情報に基づき、実行可能なアプリケーション又は手順によって用いるために情報を計算、処理、解析、修正、変換、又は送信することによって、及び/又は出力デバイスに情報をルーティングすることによって動作する。
【0170】
実行可能なアプリケーションは、例えばユーザーコマンド又は入力に応答して、例えばオペレーティングシステム、ソフトウェアアプリケーションプログラム、又はその他の情報処理システムの機能を含む予め決められた機能を実装するための機械コード又は機械によって読み取り可能命令を具備する。
【0171】
実行可能な手順は、符号の1つのセグメント(すなわち、機械によって読み取り可能な命令)、サブルーチン、又は符号のその他の個別の部分又は実行可能なアプリケーションのうちの1つ以上の特定のプロセスを実行するための部分であり、受信された入力パラメータに基づいて(又は受信された入力パラメータに応答して)動作を実施することと、その結果得られた出力パラメータを提供すること、とを含むことができる。
【0172】
様々な実施形態においては、本発明を実装するためにハードワイヤド回路をソフトウェア命令と組み合わせて用いることができる。従って、技術は、ハードウェア回路とソフトウェアの特定の組合せ、又はデータ処理システムによって実行される命令に関する特定のソースに限定されない。さらに、本説明全体を通じて、説明を単純化するために、様々な機能及び動作はソフトウェアコードによって実行されるか又は引き起こされるものとして説明されている。しかしながら、該表現によって意味されることは、これらの機能は、プロセッサによるコードの実行の結果生じるということを当業者は認識するであろう。
【0173】
本発明の側面は、少なくとも一部分はソフトウェア内において具体化できることが本説明から明確になるであろう。すなわち、技術は、機械によって読み取り可能な媒体内に内蔵される一連の命令を実行するプロセッサに応答してコンピュータシステム又はその他のデータ処理システムにおいて実行することができる。
【0174】
機械によって読み取り可能な媒体は、機械(例えば、コンピュータ、ネットワークデバイス、パーソナルデジタルアシスタント、コンピュータ、データプロセッサ、製造工具、一組の1つ以上のプロセッサを有するいずれかのデバイス)によってアクセス可能な形態で情報を提供(すなわち、格納及び/又は送信)するいずれかのメカニズムを含む。機械によって読み取り可能な媒体は、データ処理システムによって実行されたときに本発明の様々な方法をシステムに実行させるソフトウェア及びデータを格納するために用いることができる。この実行可能なソフトウェア及び/又はデータの一部分は、様々な場所に格納することができる。例えば、機械によって読み取り可能な媒体は、記録可能な/記録不能な媒体(例えば、読取専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、磁気ディスク記憶媒体、光学記憶媒体、フラッシュメモリデバイス、非揮発性メモリ、キャッシュ、遠隔記憶デバイス、等)、及び、電気的、光学的、音響的又はその他の形態の伝搬される信号(例えば、搬送波、赤外線信号、デジタル信号、等)を含む。
【0175】
上記の明細書においては、本発明は、特定の典型的実施形態に関して説明されている。以下の請求項において詳述される本発明のより広範な精神及び適用範囲から逸脱することなしに該典型的実施形態の様々な修正を行うことが可能であることが明確になるであろう。従って、仕様及び図面は、制限することを意味するのではなくむしろ例示することを意味するものであるとみなされるべきである。
【図面の簡単な説明】
【0176】
【図1】本発明の一側面による、全地球的航法衛星システム(GNSS)、セルラーシステム、及び移動局を含む通信システムを表すブロック図である。
【図2】本発明の一側面による、現在のRRLP仕様に関する無線資源位置特定サービスプロトコル(RRLP)測位要求メッセージ及びRRLP測位応答メッセージを修正するための4つの選択肢を表す表Aを示した図である。
【図3】本発明の一側面による、4つの選択肢のうちの1つに従って現在のRRLP測位要求メッセージ及び現在のRRLP測位応答メッセージを修正するための方法を示した図である。
【図4】本発明の一側面による、現在のRRLP仕様に関するRRLP測位要求メッセージを表す表1を示した図である。
【図5】本発明の一側面による、現在のRRLP仕様に関するRRLP測位応答メッセージを表す表2を示した図である。
【図6】本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示した図である。
【図7】本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示した図である。
【図8】本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示した図である。
【図9】本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示した図である。
【図10】本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示した図である。
【図11】本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示した図である。
【図12】本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示した図である。
【図13】本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示した図である。
【図14】本発明の一側面による、選択肢3に従った修正されたRRLP測位要求メッセージを表す表7を示した図である。
【図15】本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示した図である。
【図16】本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示した図である。
【図17】本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示した図である。
【図18】本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示した図である。
【図19】本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示した図である。
【図20】本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示した図である。
【図21】本発明の一側面による仮想GNSS時間を決定するためのタイミング図である。
【技術分野】
【0001】
関連出願の相互参照
本特許出願は、“Virtual GNSS Time”(仮想GNSS時間)いう題名を有し、本発明の譲受人に対して割り当てられており、本明細書において参照されることによって本明細書に組み入れられている米国仮特許出願番号60/782,955(出願日:2006年3月15日)に対する優先権を主張するものである。本特許出願は、“Global Navigation Satellite System”(全地球的航法衛星システム)いう題名を有し、本発明の譲受人に対して割り当てられており、本明細書において参照されることによって本明細書に組み入れられている米国特許出願一連番号11/621,935(出願日:2007年1月10日)の一部継続出願である。
【0002】
本発明は、一般的には、通信システムに関するものである。本発明は、より具体的には、全地球的航法衛星システムを含む通信システムに関するものである。
【背景技術】
【0003】
無線ネットワークにおける移動局の位置を計算する際に採用される数多くの異なる型の技術が存在しており、これらの技術は、様々なレベルの成功度及び精度を有する。アシステッドGPS(A−GPS)は、無線ネットワークにおける移動局の所在位置を特定するために現在用いられる測位技術である。A−GPSサーバーは、短い初期位置算出時間(TTFF)を有すること、弱い信号の取得を可能にすること、及び移動局の電池使用を最適化することを目的として援助データを移動局に提供する。A−GPSは、隔離された状態での位置特定技術として用いられるか又は疑似距離(range−like)測定値を提供するその他の測位技術とハイブリッド化される。
【0004】
A−GPSサーバーは、無線移動局の概算位置専用のデータを無線移動局に提供する。援助データは、移動局が素早く衛星にロックオンするのを援助し、潜在的に、ハンドセットが弱い信号にロックオンするのを可能にする。これで、移動局は、位置計算を行うか、又はオプションとして、該計算を行うために、測定された符号位相及び潜在的に搬送波位相をサーバーに戻す。A−GPSサーバーは、例えば十分な数の衛星が見えないときに、本来であれば可能でない可能性がある場合に位置を計算するために追加情報、例えばセルラー基地局から移動局への往復タイミング測定値、を利用することができる。
【0005】
衛星に基づく全地球測位システム(GPS)、タイミングアドバンス(TA)、及び地上における強化観測時間差(E−OTD)位置固定技術の進歩は、移動局加入者の地理上の位置(例えば、緯度及び経度)の正確な決定を可能にする。地理上の位置特定サービスは無線通信ネットワーク内において展開されるため、該位置情報は、ネットワーク要素内に格納すること及びシグナリングメッセージを用いてネットワーク内のノードに引き渡すことができる。該情報は、SMLC(サービングモバイルロケーションセンター)、SAS(独立型SMLC)、PDE(位置決定エンティティ)、SLP(セキュアユーザープレーンロケーションロケーションプラットフォーム)及び特殊目的移動加入者位置データベース)において格納することができる。
【0006】
特殊目的移動加入者位置データベースの一例は、第三世代パートナーシッププロジェクト(3GPP)によって提案されるSMLCである。特に、3GPPは、SMLCへの及びSMLCからのモバイル加入者位置情報を通信するためのシグナリングプロトコルを定義している。このシグナリングプロトコルは、無線資源LCS(位置特定サービス)と呼ばれてRRLPで表され、移動局とモバイル加入者の位置に関連するSMLCとの間において通信されるシグナリングメッセージを定義する。RRLPプロトコルに関する詳細な説明が、3GPP TS 44.031 v7.2.0(2005−11)第三世代パートナーシッププロジェクト;Technical Specification Group GSM Edge Radio Access Network(技術仕様グループGSMエッジ無線アクセスネットワーク); Location Services(LCS);Mobile Station(MS)−Serving Mobile Location Center(SMLC) Radio Resource LCS Protocol(RRLP)(Release7)(サービングモバイルロケーションセンター(SMLC)無線資源 LCSプロトコル)(RRLP)(リリース7)において行われている。
【0007】
米国全地球測位システム(GPS)に加えて、その他の衛星測位システム(SPS)、例えばロシアのGLONASSシステム又は提案されている欧州ガリレオシステム、又は提案されている中国のコンパス/北斗システムも移動局の位置特定のために用いることができる。しかしながら、これらのシステムの各々は、異なる仕様に従って動作する。特に、これらのシステムの各々は、独自の専用システム時間を用いる。
【0008】
ガリレオの打ち上げに伴い、可視航法衛星数が、基本的には、結合GPS/ガリレオ受信機においては2倍、結合GPS/GLONASS/ガリレオ受信機においては3倍になっており、一般的にはサービス利用可能性及び精度が向上している。これらの追加の衛星は、冗長性を提供し、例えば十分な幾何学的精度低下率(GDOP)を維持する一方で不良な品質の測定値を排除するために用いることができる。
【0009】
一定の極めて重要な航行シナリオにおいては、例えば結合GPS/ガリレオ受信機は、GPS及びガリレオのいずれもが成功裏の航法ソリューションを入手する上で十分な衛星測定値を単独で提供しない場合に位置フィックス(fix)を入手することができる。
【0010】
GPS(全地球測位システム)及びガリレオは、独立したナビゲーションシステムであり、従って、各システムは、自己の航行時間基準を用いる。GPSシステム時間は、UTC(USNO)と呼ばれる米国海軍観測衛星によって維持されるuniversal temps coordine(UTC)(協定世界時)に従って調整される。GPSシステム時間は、UTC(USNO)の1マイクロ秒モジュロ1秒内に維持するように規定されている。
【0011】
ガリレオシステム時間は、国際原子時間(TAI)に従って調整されることが期待されており、TAIの50ns以内に維持するように規定されている。潜在的な整数秒数に加えて、GPSとガリレオシステム時間との間におけるオフセットは、数十ナノ秒のオーダーであることが期待されている。
【0012】
GPSとガリレオシステム時間との間におけるオフセットは、将来のGPSブロードキャスト航法メッセージ内に加えてガリレオブロードキャスト航法メッセージ内に含められることになり、GPS−ガリレオ時間オフセット、より一般的にはGPS−GNSS時間オフセット(GGTO)と呼ばれる。GPSに関しては、GGTOは、IS−GPS−200、Revision Dの2004年12月版のメッセージ型35において既に規定されており、GPS−ガリレオGGTO及びGPS−GLONASS GGTOを含むことができる。
【0013】
例えば、航法ソリューションにおいてGPS及びガリレオ疑似距離測定値を用いる結合GPS/ガリレオ受信機は、以下の3つの選択肢に従って機能することができる。
【0014】
1. 位置計算においてGPS−ガリレオ時間オフセットを無視する。
【0015】
2. 航法ソリューションの一部として追加の衛星信号測定値を用いてGGTOを入手する。
【0016】
3. 航法メッセージを復号することによって又はセルラーネットワークによって提供される援助データを介して入手可能なGGTOを用いる。
【0017】
第1の選択肢は、結果的にバイアスを有する航法ソリューションになる可能性がある。バイアス量は、実際のGGTOに依存し、一定のシナリオにおいては受け入れ可能であるが、当然のことながらその他の選択肢よりも望ましくない。
【0018】
第2の選択肢は、航法ソリューションにおいて少なくとも1つの追加の衛星測定値が要求され、該測定値は、一定の重要シナリオ(例えば、屋内又は都市のビルの谷間)においては常には入手できない可能性がある。三次元位置、受信機時間バイアス、及びGGTOに関する解決のために最低5つの衛星測定値が要求されることになるが、精度を向上させるために6つ以上の衛星測定値が望ましい。
【0019】
第3の選択肢は、追加の衛星測定値を要求せず、衛星の可視度が制限されている環境(例えば、屋内又は都市のビルの谷間)において好ましい手法である。GGTOは、衛星航法メッセージを復号することによって入手することができ(ただし、十分な衛星信号強度を要求し、相対的に長時間を要する、すなわちTTFFを長くする)、又は援助データメッセージ内において提供することができる(ただし、標準化された位置特定プロトコルの修正を要求する)。ユーザー受信機は、GPS及びガリレオ衛星に関する疑似距離を結合時にGGTOを考慮に入れなければならない。GPS及びガリレオのいずれによる観測も、航法ソリューションを適用する前にGGTOに関して補正しなければならない。
【0020】
しかしながら、航法ソリューションにおいて様々な異なるシステム時間及び時間オフセットを取り扱うことは、既存のユーザー受信機の実質的な改修を要求し、明らかなことに、この能力を有する次世代のユーザー受信機の生産に関わるコストを上昇させることになる。
【0021】
従って、モバイル受信機において様々なGNSSシステム時間を処理する必要なしに及び援助及びモバイル測定データの転送に関する完全に新しい位置特定プロトコルを指定することなしに位置特定に関するよりいっそうの効率及び利点を提供するために、単に1つの衛星システムだけではなく2つ以上の衛星システムから送信された衛星信号に基づいて移動局に関する所在位置を決定することができる、全地球的航法衛星システム(GNSS)を含む通信システムが必要である。
【0022】
さらに、既存のユーザー受信機に関する多額のアップグレードコストを発生させずに及び将来のユーザー受信機に関する生産コストを発生させずにGGTOに関する計算及び補正を行うように適合化された通信システム、方法及び/又は装置が必要である。
【発明の開示】
【発明の概要】
【0023】
本発明は、方法、装置、及び/又はシステムを含む。前記装置は、前記方法を実行するデータ処理システムと、前記データ処理システムにおいて実行されたときに前記データ処理システムに前記方法を実行させる実行可能アプリケーションを格納するコンピュータによって読み取り可能な媒体と、を含むことができる。
【0024】
本発明の一側面により、第1及び第2の全地球的航法衛星システム(GNSS)の各々は、第1及び第2の仕様にそれぞれ従って動作するように適合化され、各々は、第1及び第2の複数の宇宙ビークル(SV)をそれぞれ含む。前記第1及び第2の複数のSVの各々は、第1及び第2の複数の一意の対応する識別(ID)によってそれぞれ識別されるように適合化される。プロセッサは、前記第1の複数の一意の対応するIDに応じて前記第1の複数のSVから送信された第1の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第2の複数の一意の対応するIDに応じて前記第2の複数のSVから送信された第2の複数の対応する信号を受信及び識別するように適合化される。前記プロセッサは、前記第1の複数の対応する信号及び前記第2の複数の対応する信号を受信及び識別することに応答して位置特定情報を決定するように適合化される。
【0025】
本発明のその他の側面により、本発明は、装置、方法、コンピュータによって読み取り可能な媒体、及び信号プロトコルを採用する。
【0026】
本発明のこれらの及びその他の側面は、添付図面から及び以下の発明を実施するための最良の形態から明確になるであろう。
【0027】
本発明の側面は、例として示されるものであり、添付図面内の図において制限することを目的とするものではない。同様の参照番号は、対応する要素を示す。
【発明を実施するための最良の形態】
【0028】
以下の説明及び図面は、本発明を例示するものであり、本発明を制限するものであるとは解釈すべきではない。本発明について徹底的に理解できるようにするために数多くの特定の詳細事項が説明される。しかしながら、一定の場合においては、本発明に関する説明を曖昧にするのを回避するために、よく知られる又は従来の詳細事項については説明されない。本開示における1つの実施形態又はいずれかの実施形態への参照は、必ずしも同じ実施形態のみを参照するものではなく、該参照は、1つ以上の実施形態を含む。
【0029】
通信システム10
図1は、本発明の一側面による、全地球的航法衛星システム(GNSS)11と、セルラーシステム12と、ランドライン電話システム13と、を含む通信システム10を表すブロック図である。GNSSシステム11は、複数の全地球的航法衛星14乃至21を含み、第1のGNSSと関連づけられた第1の組の衛星14乃至第17と、第2のGNSSと関連づけられた第2の組の衛星18乃至21と、を含む。第1及び第2のGNSSは、いずれかの2つの異なるGNSS、例えば、米国全地球測位システム(GPS)又はその他の衛星測位システム(SPS)、例えばロシアのGLONASSシステム、又は提案されている欧州ガリレオシステム、であることができる。図1は、2つのGNSSのみを示すが、本発明は、2つのGNSSに限定されない。例えば、GNSS11は、3つ以上の衛星システム、例えばGPS、ガリレオ及びGLONASS衛星、を具備することができる。
【0030】
セルラーシステム12は、複数のセルラー基地局22乃至24(“基地局”)と、移動交換局25と、位置決定エンティティ(PDE)26とも呼ばれる位置特定サーバーと、を含む。PDE26は、3GPP SMLC又は3GPP SASであることができる。各基地局22乃至24は、基地局(BS)送信機27と、BS受信機28と、GPS受信機29と、第1のGNSS受信機(例えば、GPS受信機)29と、第2のGNSS受信機(例えば、ガリレオ受信機)30と、をさらに含む。各基地局22乃至24は、図1に示されないより多くのGNSS受信機(例えば、追加のGLONASS受信機)を含むことができる。GNSS受信機の全部又は一部は、基地局22乃至24の内部又は外部に配置することができる。GPS受信機29は、GPS衛星14乃至17から信号を受信する。ガリレオ受信機35は、ガリレオ衛星18乃至21から信号を受信する。同様に、図1に示されない各追加のGNSS受信機は、該当するGNSS衛星から信号を受信する。
【0031】
通信システム10は、移動局31に関する無線通信を提供し、セルラー、固定無線、PCS、又は衛星通信システムに限定されない。通信システム10は、いずれかの基準又はプロトコル、例えばCDMA、TDMA、FDMA、又はGSM、又はその組合せに従って複数のアクセス通信に備えることができる。
【0032】
全地球的航法衛星システム(GNSS)11
GNSSシステム11は、衛星、例えばGPS衛星14乃至17及びガリレオ衛星18乃至21の集合体であり、各々の衛星は、地表上方における予測可能な軌道上を走行する。各衛星は、衛星にとって一意の疑似雑音(PN)符号によって変調された信号を送信する。各PN符号は、予め決められたチップ数を具備する。例えば、GPS Coarse/Acquition(C/A)符号を具備し、PN符号は、ミリ秒ごとに繰り返される1,023のチップシーケンスである。GPS受信機、例えばGPS受信機24、は、GSP受信機にとって可視である各々の衛星からの信号の混合を具備する合成信号を受信する。受信機内の信号検出器は、特定の衛星に関する受信された信号とPN符号のシフトされたバージョンとの間の相関関係度を決定することによって該特定の衛星からの送信を検出する。シフトオフセットのうちの1つに関する相関値内における十分な品質のピークが検出された場合は、GPS受信機は、衛星からの送信を検出しているとみなされる。
【0033】
無線セルラーネットワーク(例えば、セルラーシステム12)において移動局31に関する位置特定を行うために、幾つかの手法は、例えば、幾つかのジオメトリ的に異なる測定値、例えば距離、疑似距離、往復遅延及び個別の基準点(例えば、GPS衛星、疑似衛星、基地局、地球表面)と関連づけられたその他、を用いて位置計算を行う。
【0034】
高度順方向リンク三角測量法(AFLT)、強化観測時間差法(E−OTD)、又は観測到着時間差法(OTDOA)と呼ばれる1つの手法は、移動局31において、幾つかの基地局の各々から送信された信号(例えば基地局22乃至24からの送信)の到着時間を測定する。これらの時間又は時間差は、位置決定エンティティ(PDE)(例えばロケーションサーバー)26に送信され、位置決定エンティティ(PDE)(例えばロケーションサーバー)26は、これらの受信時間又は時間差を用いて移動局31の位置を計算する。これらの基地局における送信時間は、特定の時間インスタンスにおいて複数の基地局22乃至24と関連づけられた時刻が知られておりさらに規定された誤差限度内にあるような形で調整又は測定される。基地局22乃至24の正確な位置及び受信時間は、移動局31の位置を決定するために用いられる。
【0035】
AFLTシステムにおいては、基地局22乃至24からの信号の受信時間が移動局31において測定される。このタイミングデータは、移動局31の位置を計算するために用いることができる。該計算は、移動局31によって入手されたタイミング情報が通信リンクを介してロケーションサーバー26に送信される場合は、移動局31において又はロケーションサーバー26において行うことができる。典型的には、受信時間は、セルラー基地局22乃至24のうちの1つを通じてロケーションサーバー26に通信される。ロケーションサーバー26は、移動交換局25を通じて基地局からデータを受信するために結合される。ロケーションサーバー26は、基地局の位置及び/又は基地局のカバレッジエリアを提供する基地局アルマナック(BSA)サーバーを含むことができる。代替として、ロケーションサーバー26及びBSAサーバーは、互いに別々であることができ、ロケーションサーバー26は、基地局と通信して位置決定用の基地局アルマナックを入手する。移動交換局25は、移動局31に信号が搬送できるようにするため又は移動局31からその他の電話(例えば、ランドライン公衆交換電話システム(PSTS)13におけるランドライン電話又はその他の携帯電話)に信号を搬送できるようにするために、PSTSに又はPSTSから信号(例えば、音声、データ、及び/又は映像通信)を提供する。幾つかの場合においては、ロケーションサーバー26は、セルラーリンクを介して移動交換局25と通信することもできる。(関連づけられた位置測定ユニット(LMU)を用いることができる)ロケーションサーバー26は、基地局22乃至24のうちの幾つかからの発射(emission)の相対的タイミングを決定することを目的としてこれらの発射をモニタリングすることもできる。
【0036】
アップリンク到着時間差(UTDOA)法と呼ばれる他の手法においては、移動局31からの信号の受信時間は、幾つかの基地局22乃至24において測定される。このタイミングデータは、移動局31の位置を計算するためにロケーションサーバー26に通信することができる。
【0037】
位置特定を行う第3の手法は、米国全地球測位システム(GPS)又はその他の衛星測位システム(SPS)、例えば、ロシアのGLONASSシステム、提案されている欧州ガリレオシステム、提案されている中国のコンパス/北斗システム、提案されているインドの地域航法システム(IRNS)、及び提案されている日本の準天頂衛星システム(QZSS)等の様々な増強システム、に関する受信機を移動局31において用いることが関わっている。既存のGLONASSシステムは、主に、複数の異なる衛星からの発射は異なる疑似ランダム符号を利用するのではなくわずかに異なる搬送波周波数を利用することによって互いに区別される点がGPSシステムと異なる。この状況においては、及びガリレオシステムの場合には、前述される実質上すべての回路及びアルゴリズムを適用可能である。本明細書において用いられる“GNSS”という用語は、該代替衛星測位システムを含み、ロシアのGLONASSシステム及び提案されている欧州のガリレオシステム、及び上述される又は上述されないその他のシステムを含む。
【0038】
第3の手法において、GPS受信機34は、衛星14乃至17の一部からの送信を検出することによって自己の位置を推定する。各検出された送信に関して、受信機は、PN符号のシフトを用いて送信時間と到着時間との間の(チップ又はチップの一部を単位とする)遅延を推定する。測位信号の既知の伝播速度が与えられている場合、GPS受信機は、自己と衛星との間の距離を推定する。この推定された距離は、衛星の周囲の球体を定義する。GPS受信機34は、各々の衛星の精密な軌道及び位置を知っており、これらの軌道及び位置の更新を連続的に受信する。この情報から、GPS受信機34は、4つの衛星に関する球体が交差する点から位置(及び現在時間)を決定することができる。ガリレオ受信機35(又はその他のGNSS受信機)は、GPS受信機34と組み合わせて、又はGPS受信機34の代替受信機として、衛星18乃至21のうちの少なくとも4つの衛星からの送信を検出することによって位置を推定することができる。
【0039】
本発明の方法及び装置は、GPS衛星を参照して説明されているが、この説明は、疑似衛星、又は衛星と疑似衛星の組合せを利用する測位システムに対しても等しく当てはめることができる点が理解されるであろう。疑似衛星は、地上に基づく送信機であり、Lバンド搬送波信号において変調されて一般的にはGPS時間と同期化された(GPS信号と類似の)PN符号をブロードキャストする。各送信機は、遠隔受信機による識別を可能にするための一意のPN符号を割り当てることができる。疑似衛星は、軌道周回衛星からのGPS信号を入手できない状況、例えば、トンネル、鉱山、ビル、又はその他の密閉されたエリア、において有用である。本明細書において用いられる“衛星”という用語は、疑似衛星又は疑似衛星の同等物を含むことが意図され、本明細書において用いられるGPS信号という用語は、疑似衛星又は疑似衛星の同等物からのGPSに類似の信号を含むことが意図される。
【0040】
衛星測位信号(SPS)信号に関して受信機を用いる該方法は、完全自律型であることができ又はセルラーネットワークを利用して援助データを提供するか又は位置計算を共有することができる。これらの様々な方法は、略して“GPS”と呼ばれる。米国特許5,945,944、5,874,914、6,208、290、5,812,087、及び5,841,396において該方法の例が説明されている。
【0041】
例えば、米国特許番号5,945,944は、受信機の位置を決定するためにGPS信号と組み合わせて用いられる正確な時間情報を携帯電話送信信号から入手するための方法を説明する。米国特許番号5,874,914は、視界内衛星のドップラー周波数シフトを通信リンクを通じて受信機に送信して受信機の位置を決定する方法を説明する。米国特許番号5,874,914は、通信リンクを通じて衛星アルマナックデータ(又はエフェメリスデータ)を受信機に送信して受信機による位置決定を援助する方法をさらに説明する。米国特許番号5,874,914は、携帯電話システムの精密搬送波周波数信号にロックしてGPS信号取得に関して受信機において基準信号を提供する方法も説明する。米国特許番号6,208,290は、受信機の概算位置を用いてSPS信号処理時間を短縮するための概算ドップラーを決定する方法を説明する。米国特許番号5,812,087は、受信機の位置を決定するために、異なるエンティティにおいて受信された衛星データメッセージの異なる記録を比較して、これらの記録のうちの1つが受信機において受信された時間を決定する方法を説明する。
【0042】
実際的な低コスト実装においては、両方のMS受信機33、GPS受信機34、及び/又はガリレオ(又はその他のGNSS)受信機35が同じエンクロージャ内に組み込まれ、実際には、受信機回路及び/又はアンテナ等の共通の電子回路を共有することができる。
【0043】
上記方法のさらに他の変形においては、往復遅延(RTD)が、基地局22、23、又は24から移動局31に送信されて対応する基地局22、23、又は24に戻される信号に関して見つけ出される。同様の、ただし代替の方法においては、往復遅延は、移動局31から基地局に送信されて移動局31に戻される信号に関して見つけられる。往復遅延は、各々が2で割り算されて片道の時間遅延の推定値が決定される。基地局の位置、及び片道遅延を知っていることは、移動局31の位置を地球上における1つの円に限定する。個別の基地局からのこれらの2つの測定値の結果、2つの円の交差点が得られ、該交差点は、地球上における2点に位置を限定する。第3の測定値(さらには到着角度又はセルセクター)が曖昧さを解決する。
【0044】
AFLT又はTDOA等の他の測位方法とGPSシステムの組合せは、“ハイブリッド”システムと呼ばれる。例えば、米国特許番号5,999,124は、少なくともi)セルに基づくトランシーバと通信システムとの間におけるセルに基づく通信システム内のメッセージの走行時間を表す時間測定値、及びii)SPS信号の走行時間を表す時間測定値の組合せから決定されるハイブリッドシステムを説明する。
【0045】
モバイルデバイスの位置を決定するための様々な方法において、高度による補助が用いられている。高度による補助は、典型的には、高度の疑似測定値に基づく。移動局31の位置の高度を知っていることは、移動局31の可能性のある位置を、その中心が地球の中心に位置する球体(楕円体)の表面に限定する。この知識は、移動局31の位置を決定するために要求される独立した測定値の数を減らすために用いることができる。例えば、米国特許番号6,061,018は、セルオブジェクトの情報から決定され、該セルオブジェクトは、移動局31と通信中のセルサイト送信機を有するセルサイトであることができる。
【0046】
最低限の一組の測定値を入手可能であるときには、移動局31の位置に関して航法方程式の一意の解を求めることができる。2つ以上の追加測定値を入手可能であるときには、(例えば、航法方程式の残留ベクトルを最小にする最小二乗解法手順を通じて)すべての入手可能な測定値に最良の形で適合する「最良の」解を求めることができる。残留ベクトルは、冗長な測定値が存在するときには該測定値における雑音又は誤差に起因して典型的にはゼロでないため、完全性監視アルゴリズムを用いて全測定値が互いに整合するかどうかを決定することができる。
【0047】
例えば、伝統的な受信機自律型完全性監視(RAIM)アルゴリズムを用いて、冗長測定値の組において整合性問題が存在するかどうかを検出することができる。例えば、1つのRAIMアルゴリズムは、
航法方程式に関する残留ベクトルの規模がしきい値を下回るかどうかを決定することができる。残留ベクトルの規模がしきい値よりも小さい場合は、測定値は整合するとみなされる。残留ベクトルの規模がしきい値よりも大きい場合は、完全性問題が存在し、その場合は、冗長な測定値のうちで最も大きい非整合性を生じさせているとみられる測定値を除去して改良された解を求めることができる。
【0048】
セルラーシステム12
先行技術においてよく知られるように、典型的には、地理上のエリアを無線カバレッジで網羅するために複数のセルラー基地局22乃至24が配置され、これらの異なる基地局22乃至24は、少なくとも1つの移動交換局25に結合される。このように、複数の基地局22乃至24が地理的に分散されるが、移動交換局25によって結合される。セルラーシステム12は、差分GPS情報を提供する基準GPS受信機29のネットワークに接続することができ、さらに、移動局の位置を計算する際に用いるためのGPSエフェメリスデータを提供することができる。セルラーシステム12は、差分ガリレオ(又はその他のGNSS)情報を提供する基準ガリレオ(又はその他のGNSS)ネットワークに接続することができ、さらに、移動局の位置を計算する際に用いるためのガリレオ(又はその他のGNSS)エフェメリスデータを提供することができる。セルラーシステム12は、モデム又はその他の通信インタフェースを通じてその他のコンピュータ又はネットワーク構成要素に、及び/又は911番電話に応答する緊急オペレータによって操作されるコンピュータシステム、例えば緊急通報センター、に結合される。IS−95に準拠するCDMAシステムにおいては、各基地局又はセクター22乃至24は、パイロット信号を送信し、該パイロット信号は、その基地局を一意で識別する繰り返し疑似ランダム雑音(PN)符号によって変調される。例えば、IS−95に準拠するCDMAシステムに関しては、PN符号は、26.67ミリ秒ごとに繰り返される32,768チップシーケンスである。
【0049】
ロケーションサーバー26は、典型的には、モデム又はネットワークインタフェース等の通信デバイスを含む。ロケーションサーバー26は、通信デバイス(例えば、モデム又はその他のネットワークインタフェース)を通じて幾つかの異なるネットワークに結合することができる。該ネットワークは、移動交換局25又は複数の移動交換局、陸上に基づく電話システムスイッチ、セルラー基地局22乃至24、その他のGPS信号受信機、その他のガリレオ受信機、その他のGNSS受信機、又はその他のプロセッサ又はロケーションサーバーを含む。ロケーションサーバー26を用いるための方法の様々な例が、米国特許5,841,396、5,874,914、5,812,087、及び6,215,442を含む数多くの米国特許において説明されている。
【0050】
データ処理システムの一形態であるロケーションサーバー26は、マイクロプロセッサ、ROM、揮発性RAM及び非揮発性メモリ(いずれも示されていない)に結合されたバスを含む。プロセッサは、キャッシュメモリ(示されていない)に結合される。バスは、これらの様々な構成要素をまとめて相互に接続する。ロケーションサーバー26は、モデム又はイーサネット(登録商標)インタフェース等のネットワークインタフェースを通じてデータ処理システムに結合されるセルラーシステム12、例えばネットワーク記憶装置、から遠隔である非揮発性メモリを利用することができる。バスは、当業においてよく知られる様々なブリッジ、コントローラ、及び/又はアダプタを通じて互いに接続された1つ以上のバスを含むことができる。多くの状況においては、ロケーションサーバー26は、人間の援助なしで自動的に動作を行うことができる。人間による対話が要求される幾つかの設計においては、I/Oコントローラ(示されていない)は、ディスプレイ、キーボード、及びその他のI/Oデバイスと通信することができる。さらに、これよりも少ない数の構成要素又はおそらくこれよりも多い数の構成要素を有するネットワークコンピュータ及びその他のデータ処理システムも本発明とともに用いることができること及びロケーション又はPDEとして行動できることも理解されるであろう。
【0051】
移動局31
セルラー移動局31(“移動局”)は、第1のGNSS受信機(例えば、GPS受信機)34と、第2のGNSS受信機(例えば、ガリレオ受信機)35又は第3の追加のGNSS受信機(例えば、GLONASS受信機)と、移動局(MS)送信機32と、移動局受信機33と、を含む。GPS受信機34は、GPS衛星14乃至17からの信号を受信する。ガリレオ受信機35は、ガリレオ衛星18乃至21からの信号を受信する。MS送信機32は、通信信号をBS受信機28に送信する。MS受信機33は、BS送信機27から通信信号を受信する。
【0052】
図1に示されていない移動局31のその他の要素は、例えば、GPSアンテナと、ガリレオ(又はその他のGNSS)アンテナと、セルラーアンテナと、プロセッサと、ユーザーインタフェースと、ポータブル電源と、メモリデバイスと、を含む。プロセッサは、プロセッサポートと、その他のモバイル機能と、をさらに含む。
【0053】
移動局31においては、各衛星信号受信アンテナ及び衛星信号受信機は、衛星信号を受信及び処理するために要求される機能を実行するための取得及び追跡回路(示されていない)等の回路を含む。衛星信号(例えば、1つ以上の衛星14乃至17、及び/又は18乃至21)から送信された信号)が、衛星アンテナを通じて受信され、様々な受信された衛星に関するPN(疑似ランダム雑音)符号を取得する取得及び追跡回路に入力される。回路によって生成されたデータ(例えば、相関インジケータ(示されていない))が、単独で又はセルラーシステム12から受信された又はセルラーシステム12によって処理されたその他のデータと組み合わせてプロセッサによって処理され、位置特定データ(例えば、緯度、経度、時間、衛星、等)が生成される。
【0054】
セルラーアンテナ及びセルラートランシーバ(例えば、MS送信機32及びMS受信機33)は、通信リンクを通じて受信及び送信された通信信号を処理するために要求される機能を実行するための回路を含む。通信リンクは、典型的には、他の構成要素、例えば通信アンテナ(示されていない)を有する1つ以上の基地局22乃至24、への無線周波数通信リンクである。
【0055】
セルラートランシーバは、通信信号(例えば、無線周波数信号)を通信アンテナ及びセルラートランシーバにルーティングする又は通信アンテナ及びセルラートランシーバからルーティングする送信/受信スイッチ(示されていない)を含む。幾つかの移動局においては、T/Rスイッチの代わりにバンド分割フィルタ、又は“デュプレクサ”が用いられる。受信された通信信号は、セルラートランシーバ内の通信受信機に入力され、処理のためプロセッサに渡される。プロセッサから送信される通信信号は、トランシーバ内に各々配置された変調器及び周波数コンバータ(示されていない)に伝搬される。セルラートランシーバ内の電力増幅器(示されていない)は、信号の利得を、1つ以上の基地局22乃至24に送信するための適切なレベルまで上げる。
【0056】
移動局31の一実施形態においては、GPS受信機24及び/又はガリレオ受信機35内の取得及び追跡回路によって生成されたデータは、通信リンク(例えば、セルラーチャネル)を通じて1つ以上の基地局22乃至24に送信される。次に、ロケーションサーバー26は、1つ以上の衛星受信機34及び35からのデータ、データが測定された時間、及び基地局自体の衛星受信機又は該データのその他のソースから受信されたエフェメリスデータに基づいて移動局31の位置を決定する。これで、位置特定データを移動局31又はその他の遠隔位置に送信して戻すことができる。通信リンクを利用するポータブル受信機に関するさらなる詳細事項が、共通譲渡された米国特許番号5,874,914において開示されている。
【0057】
移動局31は、データ入力デバイス及びデータ出力データ(いずれも示されていない)をさらに提供することができるユーザーインタフェース(示されていない)を含むことができる。
【0058】
データ入力デバイスは、典型的には、ユーザーから手作業で又は他の電子デバイスから自動的に入力データを受信することに応じてプロセッサにデータを提供する。手作業による入力に関しては、データ入力デバイスはキーボード及びマウスであるが、例えばタッチ画面、又はマイクと音声認識アプリケーションであることもできる。
【0059】
データ出力デバイスは、典型的には、ユーザー又は他の電子デバイスによって用いるためにプロセッサからデータを提供する。ユーザーへの出力に関しては、データ出力デバイスは、表示信号をプロセッサから受信することに応じて1つ以上の表示画像を生成するディスプレイであるが、例えばスピーカー又はプリンタであることもできる。表示画像の例は、例えば、テキスト、グラフィックス、映像、写真、画像、グラフ、チャート、書式、等であることもできる。
【0060】
移動局31は、あらゆる型のデータ記憶デバイス、例えば、コンピュータメモリデバイス又はその他の有形の又はコンピュータによって読み取り可能な媒体、を代表するメモリデバイス(示されていない)を含むこともできる。メモリデバイスは、1つ以上の場所に配置されて移動局の特定の実装に依存して1つ以上の技術として実装された1つ以上のメモリデバイスを代表するものである。さらに、メモリデバイスは、プロセッサによって読み取り可能であってデータ及び/又はプロセスを具体化した一連の命令を格納可能であるあらゆるデバイスであることができる。メモリデバイスの例は、限定されることなしに、RAM、ROM、EPROM、EEPROM、PROM、ディスク(ハード又はフロッピー(登録商標)ディスク)、CD−ROM、DVD、フラッシュメモリ、等を含む。
【0061】
移動局31は、移動局31の動作を制御するプロセッサ(示されていない)を含むことができる。プロセッサ内のその他のモバイル機能は、本明細書において説明されていない移動局31のその他のいずれかの又はすべての機能を代表するものである。該その他のモバイル機能は、例えば、移動局31が電話をかけること及びデータを通信することを許可するように移動局31を動作させることを含む。
【0062】
移動局31は、移動局31の電気的素子に関するポータブルな電気エネルギーを貯蔵及び提供するポータブル電源(示されていない)を含むことができる。ポータブル電源の例は、限定されることなしに、電池と、燃料電池と、を含む。ポータブル電源は、充電可能であること又は充電可能でないことができる。ポータブル電源は、典型的には、限られた量の貯蔵された電気エネルギーを有しており、移動局が動作し続けることができるようにある程度の量を使用後に交換又は再生する必要がある。
【0063】
移動局31は、固定型(すなわち、静止型)及び/又は移動型(すなわち携帯式)であることができる。移動局31は、様々な形態で実装することができ、限定されることなしに、次のデバイス、すなわち、パソコン(PC)、デスクトップコンピュータ、ラップトップコンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパーコンピュータ、ネットワークに基づくデバイス、データプロセッサ、パーソナルデジタルアシスタント(PDA)、スマートカード、携帯電話、ページャー、腕時計のうちの1つを含む。
【0064】
位置特定用途
位置特定用途例は、陸上、海上、及び空中における無限の様々な用途を含む。科学界は、精密タイミング能力及び位置情報に関してGPSを用いる。測量士は、ますます増加しつつある測量作業に関してGPSを用いる。娯楽における位置特定用途は、利用可能な娯楽スポーツ数と同じくらい多様である。位置特定は、例えばハイカー、ハンター、マウンテンバイク乗り手、クロスカントリースキーヤーの間で頻繁に用いられる。指定された所在位置までの経路を見つけるため又は進行方向又は速度を知るために自己の現在位置を常に追跡する必要がある人は、全地球測位システムの利益を利用することができる。位置特定は、現在では車両においても一般的である。幾つかの基本的なシステムが配備されており、ボタンを押すだけで(例えば、現在位置を派遣センターに送信することによって)道路に関する緊急援助を提供する。より精巧なシステムは、街路図上における車両の位置も示す。現在は、これらのシステムは、運転者が自分の現在位置を常に追跡することを可能にし、行き先に到着する上での最良のルートを提案する。
【0065】
位置特定は、緊急時における携帯電話の位置を決定することに関して及び所在位置に基づくサービスに関して役立つ。米国におけるセルラー位置特定の展開は、連邦通信委員会(FCC)拡大9−1−1命令によるものである。該命令では、ネットワークに基づくソリューションに関しては、67%の呼に関して100mの精度であること、95%の呼に関しては300mの精度であること、ハンドセットに基づくソリューションに関しては、67%の呼に関して50m、95%の呼に関して150mであることを要求している。緊急呼が開始されると、緊急サービス調整センター−緊急通報センター(PSAP)は、MLCにおいて計算された位置を利用する。欧州及びアジアでは、位置情報サービス(LBS)によって促進されているが、これらの地域では、緊急サービスセルラー位置特定に関する要求事項が確立されているか又は確立中である。
【0066】
全地球的航法衛星システム(GNSS)
Assisted−GNSS(A−GNSS)は、“拡大”又は“拡張”GNSS(E−GNSS)とも呼ばれ、GPSに加えてその他の衛星航法システムに概念を拡大している。例えば、10年以内に、GPS、GLONASS、ガリレオ、及びその他の衛星を含む80のGNSS衛星が地球軌道上を周回し、各システムに関する異なる基準に基づいて様々な信号を送信することになる可能性がある。この結果、受信機(移動型又は固定型を問わない)がこれまでよりもはるかに多くの衛星及び送信信号にアクセス可能になり、位置決定の精度及び歩留まりの両方を向上させることが可能になる。より多く衛星ということは、位置精度が衛星ジオメトリの影響をこれまでより受けにくいことを意味し、位置計算を行うときにより大きい冗長性を提供する。
【0067】
単純化されたGNSSアーキテクチャが図1に示される。セルラーシステム12、又はその他の型の広域基準ネットワーク(WARN)は、無線ネットワークの地理上のカバレッジエリア上空に配置されるGNSS受信機のネットワークである。セルラーシステム12は、ブロードキャスト航法メッセージをGNSS衛星から受信し、該メッセージをキャッシングのためにA−GNSSサーバー(例えば、PDE 26)に提供する。移動局31が緊急コールをするか又は位置特定を要求するサービスが呼び出され、A−GNSSサーバーにメッセージが送信される。PDE26は、1つ以上の基地局22乃至24の位置を用いて要求されるGNSS援助データを概算位置として計算として移動局31に提供する。
【0068】
基準
A−GPSサーバーの異なる構成要素が3GPP TS 23.271、TS43.059及びTS25.305において定義されている。サービングモバイルロケーションセンター(SMLC)が無線ネットワークの一部として配備され、その目的は、ネットワーク内におけるハンドセットの位置を決定することである。
【0069】
SMLCはGSM/GPRSネットワークにおいて実行し、UMTSネットワークにおいてはスタンドアロンSMLC(SAS)、ユーザープレーンソリューションにより異なる無線アクセス型をサポート時にはSUPLロケーションプラットフォーム(SLP)と呼ばれる。SMLCは、すべてのハンドセットに基づく及びネットワークに基づく無線位置特定方法をサポートすることができ、ハンドセットに基づくバージョン及びハンドセットによる補助バージョンの両バージョンにおけるA−GPSを含む。
【0070】
ハンドセットによるA−GPSメッセージ送信のためのプロトコルをサポートする仕様(すなわち基準)が数種類存在する。GSMネットワークは、RRLP仕様を用いる。UMTSネットワークは、無線資源制御(RRC)仕様を用いる。CDMAネットワークは、TIA IS−801仕様及び3GPP2 C.S0022仕様を用いる。これらの仕様の各々は、同じ基本情報を符号化するための異なる方法を規定しているが、採用された無線技術専用である。本説明は、RRLP仕様の修正例(例えば選択肢)について説明するものであるが、RRC仕様、IS−801及びC.S0022仕様又はその他のいずれかの仕様を修正して同じ又は同様の効果を達成させるようにすることが可能である。
【0071】
RRLP仕様は、測位命令及び可能な場合の援助データを移動局31に提供する測位要求メッセージ36(図1)と、移動局31からの移動局31位置推定値又は疑似距離測定値をセルラーシステム12に提供する測位応答メッセージ37(図1)と、を含む。RRC仕様、IS−801/C.S0022仕様又はその他のいずれかの仕様は、同じ又は同様の効果を達成させるための要求及び/又は応答メッセージを含むことができる。
【0072】
RRLP測位メッセージを修正するための4つの選択肢
図2は、本発明の一側面による、RRLP仕様に関するRRLP測位要求メッセージ36(図1参照)及びRRLP測位応答メッセージ37(図1参照)を修正するための4つの選択肢を表す表Aを示す。表Aにおいては、RRLP測位要求メッセージ36及びRRLP測位応答メッセージ37は、表1及び表2において現RRLP仕様に関してそれぞれ表されている。選択肢1は、表3及び4において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢2は、表5及び6において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢3は、表7及び8において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。選択肢4は、表9及び10において修正されたRRLP測位要求メッセージ及び修正されたRRLP測位応答メッセージをそれぞれ提供する。
【0073】
選択肢1は、ガリレオ/GNSSを新たな衛星位置特定方法として導入する。
【0074】
選択肢2は、“GNSS位置特定方法”を導入し、様々な衛星群(GPS、ガリレオ、及び潜在的な将来の衛星航法システム又は衛星増強システム)の詳細を新しいGNSS情報要素においてカプセル化する。
【0075】
選択肢3は、特定の衛星群のインタフェース制御ドキュメント(ICD)と無関係の“GNSS位置特定方法”を導入する。
【0076】
選択肢4は、各々の選択肢1、2、及び3を評価及び比較後に選択肢2及び選択肢3の利点の組合せを導入する。
【0077】
選択肢1、2、及び3は、ガリレオ/GNSSをどのような方法でRRLP仕様に追加可能であるかについて説明されている。
【0078】
測位要求メッセージ及び測位応答メッセージの修正方法
図3は、本発明の一側面により、4つの選択肢のうちの1つに従って現在のRRLP仕様に関するRRLP測位要求メッセージ36及びRRLP測位応答メッセージ37を修正するための方法38を示す。ブロック50において方法38が開始する。ブロック51において、方法38は、RRLP測位要求メッセージ36を識別する(例えば表1)。ブロック52において、方法38は、選択肢1(例えば表3)、選択肢2(例えば表5)、選択肢3(例えば表7)、又は選択肢4(例えば表9)に従ってRRLP測位要求メッセージ36(例えば表1)を修正する。ブロック53において、方法38は、RRLP測位要求応答メッセージ37を識別する(例えば表2)。ブロック54において、方法38は、選択肢1(例えば表4)、選択肢2(例えば表6)、選択肢3(例えば表8)、又は選択肢4(例えば表10)に従ってRRLP測位応答メッセージ37(例えば表2)を修正する。
【0079】
表3、5、7、及び9の各々は、選択肢1、2、3、及び4に関する修正されたRRLP測位要求メッセージをそれぞれ表し、表1に示される現在のRRLP測位要求メッセージの要素と、第2のGNSSシステム(例えば、ガリレオ)をサポートする新しい要素60と、を含む。表4、6、8、及び10の各々は、選択肢1、2、3、及び4に関する修正されたRRLP測位応答メッセージをそれぞれ表し、GNSSシステム(例えば、ガリレオ)に関する新しい要素60と同様に、表2に示される現在のRRLP測位応答メッセージの要素を含む。参照番号60は、一般的には、表3乃至10の各々における新しい要素を一般的に識別するが、これらの表の各々における新しい要素は異なることができる。表3乃至10の各々においては、現在の要素が最初に示されて新しい要素が後続するが、このことは必須事項ではない。従って、各々の表3、5、7、及び9の最初は表1と同じであり、表1の要素を含み、各々の表4、6、8、及び10の最初は表2と同じであり、表2の要素を含む。
【0080】
現在のRRLP測位要求メッセージ及び応答メッセージ
図4は、本発明の一側面による、現在のRRLP仕様に関するRRLP測位要求メッセージ36を表す表1を示す。図5は、本発明の一側面による、現在のRRLP仕様に関するRRLP測位応答メッセージ37を表す表2を示す。
【0081】
図4及び5は、アシステッド−GPS(A−GPS)に関するRRLP仕様において現在説明されるRRLP測位要求メッセージ及びRRLP測位応答メッセージをそれぞれ例示し、RRLP仕様へのガリレオの導入のための変更を示す。RRLP仕様(TS44.031)は、主GERAN仕様であり、ガリレオ/GNSSをサポートするために修正する必要がある。RRLP仕様は、測位命令及び援助データ要素の詳細を含む。
【0082】
RRLP仕様は、測位命令及び可能な場合の援助データを移動局31に提供する測位要求メッセージと、移動局31からの移動局31位置推定値又は疑似距離測定値をセルラーシステム12に提供する測位応答メッセージと、を含む。
【0083】
ガリレオ/GNSSの導入に関して必要な変更が、表1及び2の右端の列において要約される。右端の列内が空欄である場合は、変更が要求されないことを示す。右端に示される変更は、特定の選択肢(すなわち、選択肢1乃至4)のみを対象にしたものではなく、いずれの既存のA−GPSパラメータを再使用可能であるか又は交換、拡大又はその他の形での修正を行う必要があるかを示す。幾つかの場合においては、幾つかのパラメータ変更を最終決定できるようになる前にガリレオに関する追加情報が必要になる(最終仕様)。
【0084】
表1と2、及び表3乃至10の各々において、“>”シンボル数は、ASN.1符号化内におけるフィールドの階層レベルを示す。
【0085】
選択肢1−新しい位置特定方法“ガリレオ”
図6及び7は、本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示す。図8及び9は、本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示す。
【0086】
選択肢1において、表1に示されるように、A−GPSと同様に、新しいガリレオ要素60が現在のRRLP仕様に追加される。現在のA−GPS専用情報要素が引き続き用いられ、新しいガリレオ専用情報要素60が追加される。
【0087】
RRLP仕様に関する修正は、例えばリリース7拡張コンテナ内において新しい情報要素を導入することであり、測位要求メッセージ及び測位応答メッセージに関するそれぞれの表3及び4において要約される。
【0088】
選択肢1は、幾つかの方法で実装することができ、表3及び4は一例を説明する。
【0089】
選択肢1の利点は、以下の項目を含む。
【0090】
1. 現在のRRLPプロトコルが直線的に展開される。既存のA−GPS情報要素が、結合されたGPS−ガリレオ受信機に関して依然として用いられる。A−GPS専用受信機は、既存のA−GPS情報要素を引き続き使用し、ガリレオ専用受信機は、新しく追加された情報要素のみを用いるか又は新しく追加された情報要素をほとんどの場合に用いる。
【0091】
2. 既存のプロトコル及びA−GPS実装の後方互換性が保持される。既存のA−GSP実装(SMLC及びMS)は、ガリレオの導入による影響を受けない。
【0092】
3. 従来の及びアシステッドGNSSモードは、異なるユーザーアルゴリズムを要求しない。
【0093】
選択肢1の難題は、以下の項目を含む。
【0094】
1. 援助データ要素はICD専用である。従って、最終的なガリレオICDが利用可能になる前にすべての要求されるガリレオ援助データ要素を定義することができない可能性がある。
【0095】
2. 一般的手法でない。新しいGNSSシステムを追加しなければならなくなるごとに、仕様を適宜修正しなければならない。
【0096】
選択肢2−新しい位置特定方法“GNSS”
図10及び11は、本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示す。図12及び13は、本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示す。
選択肢2においては、新しい位置特定方法“GNSS”が導入され、GPS及び/又はガリレオ専用情報要素がGNSS情報要素においてカプセル化される。
【0097】
RRLP仕様に関して要求される修正は、例えばリリース7拡張コンテナ内において新しい情報要素を導入することであり、測位要求メッセージ及び測位応答メッセージに関するそれぞれの表5及び6において要約される。
【0098】
選択肢2は、幾つかの方法で実装することができ、表5及び6は一例を説明する。表5及び6に示される例は、GPS及びガリレオに関しては共通のASN.1符号化が可能であると仮定する提案に従ったものである。
【0099】
選択肢2の利点は以下の項目を含む。
【0100】
1. 選択肢2の結果として、同じGNSSシグナリングを共有する上でGPS及びガリレオと十分な適合性を有することを条件として、RRLPにおいて新しいGNSSシステムに関する追加のASN.1符号化を少なくすることができる。
【0101】
2. 従来の及びアシステッドGNSSモードは、異なるユーザーアルゴリズムを要求することができない。
【0102】
選択肢2の難題は以下の項目を含む。
【0103】
1.RRLPにおいて2つの分枝(branch)が生成される。現在のA−GPS実装は、既存の情報要素を引き続き使用することになり、将来のGPS/ガリレオ実装(SMLC及びMS)は、既存のA−GPS情報要素及び新しいGNSS情報要素の両方をサポートしなければならない。端末及びSMLCがGNSSに関する能力を有する場合は、A−GPS専用である場合においても新しいGNSS情報要素のみを用いることができる。しかしながら、すべてのネットワーク内のすべてのSMLCが両方のプロトコル分枝をサポートするわけではないため、GNSSに関する能力を有する端末は、依然として既存のA−GPS情報要素も同様にサポートしなければならない(例えば、GNSSがリリース7に追加されると仮定した場合は、すべてのSMLCがリリース7をサポートするまでは、新たなリリース7に関する能力を有する端末はリリース6もサポートしなければならない。
【0104】
2.A−GPS関連情報要素は、既存のRRLP及び新しいGNSS分枝において2回定義される。
【0105】
3. 援助データ要素はICD専用であるが、共通のASN.1符号化を有する。共通のASN.1符号化は、実行可能でない場合がある。
【0106】
4. この選択肢を用いる将来の航法システム及び増強システムがGPS及びガリレオと十分な適合性を有さない場合は、これらの将来のシステムを追加することは困難又は不可能な場合がある。その場合は、異なる選択肢(例えば、選択肢1又は選択肢4)に戻ることが必要になる場合がある。
【0107】
選択肢3−いずれのICDからも独立した新しい位置特定方法“GNSS”
図14は、本発明の一側面による、選択肢3に従った修正されたRRLP測位要求メッセージを表す表7を示す。図15及び16は、本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示す。
【0108】
選択肢3は、選択肢2と同様である(すなわち、新しい測位方法“GNSS”が導入される)が、この手法は、衛星群データの点に加えて構造の点でも一般的であることが維持される。援助データ要素及び測定結果は、いずれのICDについても専用にならない。
【0109】
衛星航法データを用いるか又はA−GPS概念を再度用いるか又は拡張する代わりに、A−GNSS能力を有する端末に関して測位援助データが特に生成される。例えば、GPS又はガリレオエフェメリスパラメータとは無関係に航法モデルが符号化され、中高度地球周回軌道(MEO)衛星に関する軌道モデルで十分になる。時間は、GPS又はガリレオ曜日(TOW)から独立しており、例えば、世界標準時座標(UTC)を用いることが可能である。
【0110】
RRLPにおいては、選択肢3は、選択肢2と同様にみえるが、個々の衛星群を明確に区別する必要がない。GPS/ガリレオ受信機は、GPS及びガリレオ専用信号を測定することを可能にする必要があるため、異なる衛星群を多少区別する必要が依然としてある。表7及び8において一例が概説される。すべての追加要素に関する詳細を新たに定義する必要があり、特定のICDは参照されない。
【0111】
選択肢3の利点は、以下の項目を含む。
【0112】
1. プロトコルの観点からは一般的な手法である。移動局受信機は、援助データを受信して測定値を戻す観点からGPS及びガリレオ衛星群を単一のGNSSとみなす。
【0113】
2. 援助データ要素は、特定のICDに依存しない。将来のシステムは、仕様に関して最低限の変更が要求されるか又はまったく要求されない形でサポートされる。
【0114】
選択肢3の難題は、以下の項目を含む。
【0115】
1. RRLPにおいて2つの分枝が生成される。現在のA−GPS実装は、既存の情報要素を引き続き使用することになり、将来のGPS/ガリレオ実装(SMLC及びMS)は、既存のA−GPS情報要素及び新しいGNSS情報要素の両方をサポートしなければならない。端末及びSMLCがGNSSに関する能力を有する場合は、A−GPS専用である場合においても新しいGNSS情報要素のみを用いることができる。しかしながら、ネットワーク内のSMLCが両方のプロトコル分枝をサポートすることは保証できないため、GNSSに関する能力を有する端末は、依然として既存のA−GPS情報要素をサポートしなければならない(例えば、GNSSがリリース7に追加されると仮定した場合は、SMLCがリリース7をサポートするまでは、新たなリリース7に関する能力を有する端末はリリース6もサポートしなければならない)。
【0116】
2. この手法を真に一般的な手法として維持するためには新しい共通の軌道モデル及び新しい測地学的基準フレームを定義することが必要になる場合がある。既存のA−GPSユーザーアルゴリズムをこれ以上用いることができない可能性がある。新しいGNSSプロトコルは、既存のA−GPS実装とは適合しない。
【0117】
3. 従来のGNSS実装及びアシステッドGNSS実装は異なることになる。従来のモード及び援助モードに関する異なるユーザーアルゴリズムが必要になることがある。従来のモードは、今後は援助モードの特殊ケースであるとみることはできない。
【0118】
新選択肢4−既存のGPSユニット及びフォーマットを使用するガリレオの追加
図17及び18は、本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示す。図19及び20は、本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示す。
【0119】
選択肢2及び選択肢3の難題のうちの1つは、RRLPにおいて新しいプロトコル分枝を導入することであり、A−GPSのサポートに関して2つの異なるプロトコルフォーマットが存在することになることを意味する。従って、ガリレオの導入は、最終的にはA−GPS専用実装に対しても影響を有する可能性がある。他方、選択肢2及び選択肢3は、一般的であることを試み、“全地球的航法衛星システム(GNSS)”の概念を導入する。選択肢3は、特定のICDから独立しており、従って将来の衛星システムは仕様を最低限変更するだけで又は仕様を変更する必要なしにサポートされるという利点も有する。
【0120】
選択肢4は、選択肢1、2、及び3の利点を結合させ、選択肢1、2、及び3と関連するほとんどの難題を回避する代替手法について説明するものである。
【0121】
選択肢4においては、ガリレオ又はその他のGNSSシステムは、既存のA−GPS情報要素を用いて追加される。新しいガリレオ(又はその他のGNSS)専用の情報要素(例えば、選択肢1及び2)又は新しいGNSS情報要素(例えば、選択肢3)を定義する代わりに、新しいガリレオ専用SV−IDを導入することによってガリレオ宇宙ビークル(SV)に関しても既存のA−GPS情報要素が用いられる。既存のSV−ID1−64は、GPS衛星専用で用いられ、追加のSV−ID、例えば65乃至128は、ガリレオ用に予約される。将来の衛星航法システムが容易に追加できるようにするための十分な追加のSV−IDが定義される。
【0122】
ガリレオ及び構想される将来の情報要素は、メートル、秒、ラジアン、Hz、等に変換することができ、これらは、既存のGPS単位又はフォーマットに変換することができる。変換は、情報要素の送信機及び受信機の両方において同じように適用される適切に定義された共通の仮定事項に基づく。既存のGPS情報要素パラメータは適合可能な衛星システムを網羅する適切な範囲を有するため、該変換が可能である。
【0123】
新しいガリレオSV−IDに関する時間に依存する援助データは、GPS時間に変換することができ(選択肢4a−以下の仮想GNSS時間を参照)、又はGPSからガリレオ時間オフセット(GGTO)への変換パラメータとともにガリレオ時間を用いることができる(選択肢4b)。SMLC(選択肢4a)又はMS(選択肢4b)のいずれかが、共通GPS時間枠への変換を実施する。
【0124】
RRLP ASN.1における既存のSV−IDは拡張不能であるため、将来のGNSS又は増強システムの追加を許容する、例えば最大で255(又は511又は1023)のIDを網羅する新しい“追加のSV−ID”を定義する必要がある。SVに依存するすべての既存のGPS援助データは、64よりも大きいSV−IDに関して適用可能な“追加援助データ”IEにおいて定義される。“追加援助データ”IEの符号化は、GPSに関する現在の援助データIEとまったく同じである。従って、既存のプロトコル及び実装に対する影響は最小限であるが、この手法は依然として一般的である。
【0125】
IS−801−B等のその他のロケーションプロトコルは、SV−ID用の十分な予備ビットを既に有する。従って、該ロケーションプロトコルでは“追加援助データ”IEは必要にならず、既存のロケーションプロトコル及び実装への影響をさらに低減させる。
【0126】
選択肢4を実装することが可能な場合が幾つか存在する。表9及び10に示される例は、1つの可能例であるにすぎない。幾つかの新しいASN.1符号化は、RRLPセグメントを生成するための規則を規定することによって回避することができる。例えば、新しい衛星群IDパラメータ(又は可能な場合のSV ID増分)は、衛星群専用データを含むあらゆるRRLP構成要素内に含めることができる。従って、2つ以上の衛星群に関するデータは、同じRRLP構成要素内には含められない。このことは、衛星群に関する既存のGSP ASN.1パラメータの再使用を可能にし、新たなASN.1の定義を回避する。
【0127】
選択肢4の利点は、以下の項目を含む。
【0128】
1.一般的手法であるが、既存のプロトコル及び実装と依然として適合可能である。ユーザー受信機は、(援助データを受信して測定値を戻す観点から)GPS及びガリレオ衛星群を単一のGNSSとみなす。
【0129】
2.現在のプロトコルを発展させたものである。結合GPS−ガリレオ受信機に関して既存のA−GPS情報要素が依然として用いられる。
【0130】
3.既存のプロトコル及びA−GPS実装の後方互換性が確保される。既存のA−GPS実装は、ガリレオの導入による影響を受けない。
【0131】
仮想GNSS時間
本発明は、GPS及びガリレオ(又はその他のいずれかの衛星航法システム又は増強システム)において用いられる異なる航行タイムスケールを取り扱うように適合化された通信システム、方法及び装置を含む。
【0132】
本発明の諸側面が図1及び21を参照して説明される。本発明の一側面により、ロケーションサーバー26(例えば、3GPPにおけるSMLC)は、“仮想GNSS”時間を維持して仮想GNSS時間をモバイル受信機31に通信するように適合化される。仮想GNSS時間は、移動局31がGPS及びガリレオ衛星群を単一の全地球的航法衛星システム(GNSS)であると“みる”ことを可能にする。従って、移動局31は、GPS又はガリレオ観測結果をGGTOに関して補正する必要がない。本発明の改良点は、既存の移動局の性能を向上させ、新しい移動局に関連するコストを低減する。
【0133】
ロケーションサーバー26は、GGTOを移動局31に提供する代わりに、航法モデル及びクロック補正援助を移動局31に提供するときにGGTOを考慮に入れる。動作上は、移動局31は、GPS及びガリレオブロードキャストからのクロック補正を利用せず、むしろロケーションサーバー26によって計算されて仮想GNSS時間を参照するクロック補正を利用する。
【0134】
図21は、仮想GNSS時間の計算において使用可能なタイミング図を示す。異なる航法システムを区別するために図21の異なる地域が用いられる。図21の上部分は、衛星(例えば、GPS及びガリレオ)における時間を示し、下部分は、移動局31における時間を示す。
【0135】
一例として、GPSシステム時間は、1ミリ秒の倍数で示される。各GPS衛星は、GPSシステム時間から一定のオフセットを有する自己のクロックを有する。このオフセットは、図21においては、“GPS SV#1クロックバイアス”及び“GPS SV#Nsatクロックバイアス”として示される。GPSクロックバイアスは、移動局31においては、セルラーネットワーク12から受信されるか又はGPSブロードキャスト航法メッセージを復号することによって入手されたクロック補正パラメータを用いて計算することができる。
【0136】
図21の上部分にはガリレオタイミング図も示される。ガリレオオープンサービスは、4ミリ秒の符号を使用し、従ってガリレオシステム時間は4ミリ秒の倍数で示される。GPSの動作におけるのと同じように、各衛星は、ガリレオシステム時間からの一定のオフセットを有する自己のクロックを有する。このオフセットは、図1においては、“ガリレオSV#1クロックバイアス”及び“ガリレオSV#Nsat2クロックバイアス”として示される。ガリレオクロックバイアスは、移動局31においては、GPSクロックバイアスを参照して上述されるように、ガリレオクロック補正パラメータを用いて計算することができる。
【0137】
上述されるように、GPS及びガリレオシステム時間は、独立した時間枠である。従って、図21において“GPS−ガリレオ時間オフセット(GGTO)”で表されてGPSタイムラインとガリレオタイムラインとの間において示される2つのシステム時間の間にオフセットが存在する。図21の例においては、このGGTOは1ミリ秒未満であること及びGGTOにおいては整数秒数は無視されると仮定される。
【0138】
上述されるように、GPS及びガリレオ衛星信号測定値を位置計算に関して用いる移動局31は、次の入力、すなわち、GPSエフェメリス及びGPSクロック補正パラメータ、ガリレオエフェメリス及びガリレオクロック補正パラメータ、及びGPS−ガリレオ時間オフセット(GGTO)を有することが必要になる。
【0139】
幸運なことに、本発明の諸側面は、移動局31によって受信されるデータ量及び移動局31によって要求される処理量を簡素化する。ロケーションサーバー26は、移動局31にGGTOを通信する代わりに、仮想GNSS時間を決定し、仮想GNSS時間に関するGPS及びガリレオクロック補正パラメータを計算することができる。仮想GPSS時間は、あらゆる適切な時間ベース、例えばUTC又はセルラー時間(又は、特殊ケースとして、GPS又はガリレオ時間)であることができる。仮想GNSS時間を用いることで、移動局31は、GPS又はガリレオ疑似距離を区別する必要がなく、従って上記の衛星ジオメトリに関わりなく一様に動作する。ロケーションサーバー26によって決定された場合の仮想GNSS時間が図21の最上部に示される。
【0140】
ロケーションサーバー26は、仮想GNSS時間とGPS及びガリレオシステム時間との間におけるオフセットを決定するようにさらに適合化される。GNSSクロック補正パラメータは、ロケーションサーバー26によって、既知のGPS及びガリレオクロック補正、さらにはGGTO及び仮想GNSS時間とGPS又はガリレオ時間との間におけるオフセットを用いて計算される。
【0141】
図1の下部分は、ユーザー受信機におけるタイミングを示す。MSは、GPS及びガリレオ符号位相測定を通常どおり行う。GPS及びガリレオ衛星は、例えば3GPPによって定義されたSV番号等の定義済みのSV番号を有することができる。例えば、GPS衛星の各々には、#1乃至#Nsatの番号を付けることができ、ガリレオ衛星の各々には、#Nsat+1乃至#Nsat2の番号を付けることができ、これらの番号は、3GPPの衛星番号SV#1乃至#Nsat+Nsat2に有効な形で変換される。移動局31は、正確なレプリカ符号との相互関連づけを行うためにいずれのSV番号がGPS及びガリレオ衛星にそれぞれ属するかを認識するように適合化することができる。
【0142】
個々の符号−位相測定値は、従来の方法で衛星送信時間に変換され、疑似距離測定値を計算するために用いることができる。SViまでの疑似距離ρiの定義は、方程式1において定義される。
【0143】
ρi(n)=c(TR(n)−Tn(n)) (1)
ここで、cは、伝搬定数(光の速度)であり、TR(n)は、受信機のクロックのエポックnに対応する受信時間であり、Tn(n)は、SViクロックに基づく送信時間である。
【0144】
衛星によって送信されたPRN符号が、該PRN符号とレプリカPRN符号を相互に関連させるように適合化された移動局31に到着時には、GPS又はガリレオ週の始まりに関するレプリカ符号の符号位相オフセットは、SViの送信時間を表す。図1の例(下側の“MSにおいて”を用いた場合、SV#1(“観測されたGPS時間SV#1”までの符号位相測定は、約370チップであり、この特定の衛星に関する送信時間は、方程式2において以下のように計算される。
【0145】
TTSVi =145ms−370のGPSチップ (2)
同様に、図1に示されるその他の3つの衛星測定例に関する送信時間は、以下のよう計算することができる。
【0146】
TTSVNsat =137ms−200のGPSチップ (3)
TTSVNsat+1 =142ms−3070のガリレオチップ (4)
TTSVNsat+Nsat2 =138ms−2995のガリレオチップ (5)
1つのGPS又はガリレオチップに関する継続時間は、約977ナノ秒である。図1の例における受信時間は、215msであり、従って、この例を用いた近似的な疑似距離は、以下に示されるとおりである。
【0147】
ρSV1≒c(215−144.6)≒c・70.4ms (6)
ρSVNsat≒c(215−136.8)≒c・78.2ms (7)
ρSVNsat+1≒c(215−139)≒c・76ms (8)
ρSVNsat+Nsat1≒c(215−135.1)≒c・79.9ms (9)
すべての衛星送信時間は、上述されるように、真のGPS又はガリレオ時間に関するバイアス誤差を含む(例えば、“GPS SV#1クロックバイアス”又は“ガリレオSV#1クロックバイアス”)。従来のGPS及び/又はガリレオ受信機処理においては、上記の衛星送信時間は、航法ブロードキャストメッセージから又はセルラー援助データから入手されたクロック補正パラメータを用いて航法プロセスにおけるこのGPS及びガリレオクロックバイアスに関して補正される。疑似距離は、通常は、大気遅延(例えば、電離層及び対流圏)及びその他の共通バイアス(例えば相対論的影響)に関してさらに補正される。
【0148】
従来の航法アルゴリズムは、GPS又はガリレオ疑似距離を使用し、移動局31の三次元位置及び移動局31クロックバイアス(すなわち、GPS又はガリレオシステム時間からの受信機のローカルクロックのオフセット)に関する解を求める。従って、(GPS+ガリレオ疑似距離を用いた)従来の結合GPS/ガリレオ航法処理においては、移動局31は、1つはGPS時間に関する受信機クロックバイアス、1つはガリレオ時間に関する受信機クロックバイアスの2つの受信機クロックバイアスを取り扱わなければならない。さらに、従来の結合GPS/ガリレオ航法処理においては、GPS及びガリレオ衛星までの疑似距離は、移動局31において別々に処理する必要がある。GPS及びガリレオ衛星までの疑似距離がバイアス誤差に関して補正された時点で(クロック補正及びその他)、GPSシステム時間とガリレオシステム時間との間の差を考慮に入れなければならない。GPS及びガリレオ疑似距離を従来の航法アルゴリズムにおいて用いることができるようになる前に2つのシステム間の時間オフセット(GGTO)に関してGPS又はガリレオ疑似距離のいずれかを補正しなければならない。
【0149】
しかしながら、本明細書において説明される仮想GNSSクロック補正パラメータに従い、結合GPS/ガリレオ受信機に関して既存の従来の航法処理を用いることができる。GPSクロック補正をGPS疑似距離測定値に適用してガリレオクロック補正をガリレオ疑似距離測定値に適用し、GGTOをGPS又はガリレオ疑似距離に適用する代わりに、共通のGNSSクロック補正が用いられ、GGTOに関する補償を移動局31において行う必要がない。従って、移動局31における既存の航法処理手順を結合GPS/ガリレオ測定値に関して用いることができる。すなわち、移動局31は、ガリレオ疑似距離を、まさに追加のGPS疑似距離であると“みなし”、逆に、GPS疑似距離を追加のガリレオ疑似距離であると“みなす”。
【0150】
本発明のさらなる詳細が、以下において本発明の一定の側面により使用可能な計算例を用いて説明される。
【0151】
以下の例においては、GPS送信時間tgpsは、以下によって与えられる。
【0152】
tgps=tsvigps−Δtsvigps (10)
ここで、tsvigpsは、送信時の有効GPS SVi符号位相時間であり、Δtsvigpsは、GPSクロック補正パラメータを用いて計算されたGPS SVi符号−位相時間オフセットである(図1の“GPS SV#iクロックバイアス”)。同様に、ガリレオ送信時間tgalileoは、以下によって与えられる。
【0153】
tgalileo=tsvigalileo−Δtsvigalileo (11)
ここで、tsvigalileoは、送信時の有効ガリレオSVi符号位相時間であり、Δtsvigalileoは、ガリレオクロック補正パラメータを用いて計算されたガリレオSVi符号−位相時間オフセットである(図1の“ガリレオSV#iクロックバイアス”)。
【0154】
GPSシステム時間とガリレオシステム時間との間のオフセット(GGTO)は、以下によって与えられる。
【0155】
tgps−tgalileo=tggto (12)
ここで、GGTOの符号は、規約事項である。GPSΔtsvigpsとガリレオΔtsvigalileoクロック補正、及びGGTOtggtoを移動局31に提供する代わりに、ロケーションサーバー26は、以下に示されるように仮想GNSS時間tgnssに関するGNSSクロック補正パラメータΔtsviを計算するように適合化される。
【0156】
tgps−tggnss=Δtgps−gnss (13)
ここで、Δtgps−gnssは、GPSシステム時間と仮想GNSS時間との間のオフセットであると定義される。これで、GPS衛星及びガリレオ衛星の各々に関してロケーションサーバー26によってGNSS専用クロック補正パラメータを以下のように計算することができる。
【0157】
GPS SViに関しては、ロケーションサーバー26は以下を計算するように適合化される。
【0158】
Δtsvi=Δtgps−gnss+ΔtSVigps (14)
ガリレオSViに関しては、ロケーションサーバー26は以下を計算するように適合化される。
【0159】
Δtsvi=Δtgps−gnss+Δtggto+ΔtSVigalileo (15)
ここで、Δtsviは、仮想GNSSクロック補正である。ΔtSVigps、ΔtSVigalileo及びtggtoに関する値は、ロケーションサーバー26においてGPS及びガリレオブロードキャストメッセージから入手可能であり、Δtgps−gnssに関する値は、上記されるようにロケーションサーバー26によって決定される。
【0160】
GNSSクロック補正パラメータΔtsviは、各GPS及びガリレオ衛星に関してロケーションサーバー26によって計算し、援助データメッセージにおいて一定のパラメータの形態で移動局31に提供することができる。例えば、GNSSクロック補正パラメータは、GPS及びガリレオデータメッセージの両方において慣例的である多項式係数として移動局31に提供することができる。
【0161】
本発明の様々な側面により、移動局31は、航法処理においてGPS衛星とガリレオ衛星を直接区別しない。両衛星群は、疑似距離計算に関して単一のGNSSとして取り扱われる。結合された衛星群における1つ以上の衛星を識別するために、標準化されたGNSS SVIDを各GPS衛星及びガリレオ衛星に割り当てることができる。例えば、GPS衛星は、標準化された識別GNSS SV IDi=1乃至64を通じて識別することができ、ガリレオ衛星は、標準化された番号GNSS SV IDi=65乃至128を通じて識別することができる。移動局31は、各GNSS SV IDiによっていずれのGPS又はガリレオPRN符号が用いられるかを認識するようにさらに適合化することができる。
【0162】
移動局31は、単一の衛星群に関して現在行われているのと同じ形で、各衛星測定に関するGNSS送信時間を計算するようにさらに適合化することができる。しかしながら、当業とは異なり、本発明の側面例の移動局31は、GPS又はガリレオ送信時間を直接区別する必要がない。GNSS送信時間は、以下のように計算することができる。
【0163】
tgnss =tsvi−Δtsvi (16)
ここで、tsviは、送信時の有効GNSS(GPS又はガリレオ)SVi符号位相であり、Δtsviは、上記において定義された、GNSSクロック補正パラメータ(図21における“SV#i仮想クロックバイアス”)を用いて計算されるGNSS SVi符号−位相時間オフセットである。
【0164】
本発明の他の側面においては、ロケーションサーバー26は、援助データを移動局31に提供するように適合化することができる。援助データは、例えば、可視GNSS SV IDのリストと、対応するGNSSエフェメリスパラメータ(GPS及びガリレオ専用パラメータであることができる)と、仮想GNSS時間と、GNSSクロック補正と、を含むことができる。
【0165】
本発明の他の側面においては、移動局31は、各GNSS SV IDi専用のレプリカ符号を生成してGNSS符号位相を測定するように適合化することができる。符号位相測定値は、仮想GNSS時間推定値による時間タグが付される。仮想GNSS時間は、通常はGPS又はガリレオ信号から直接入手することはできないため、上述される援助データメッセージ内において移動局31に提供することが可能である。1つの適切な手法は、ネットワーク内の例えば位置測定ユニット(LMU)を用いてロケーションサーバー26によって入手されたGNSS−セルラー時間関係の推定値をユーザー受信機に提供することである。これらのLMUは、定期的にセルラー時間と仮想GNSS時間との間の関係を測定し、これらの測定値をロケーションサーバー26に提供する。ロケーションサーバー26は、これらの時間関係のデータベースを維持し、援助データメッセージにおいてGNSS−セルラー時間関係を移動局31に提供する。LMUは、専用ネットワーク要素であること、又はこのLMU機能が実装された移動局であることができる。
【0166】
本発明の他の側面においては、仮想GNSS時間は、等しいGPS又はガリレオ時間に設定することができる。例えば、GPS時間が仮想GNSS時間として用いられる場合は、ロケーションサーバー26における方程式(14)及び(15)に従ったGNSSクロック補正パラメータの計算が単純化される。この例においては、GPSシステム時間と仮想GNSS時間との間におけるオフセットΔtgps−gnssは、ゼロになる。この例においては、GPS及びガリレオによってブロードキャストされたクロック補正パラメータ(ΔtSVigps、ΔtSVigalileo、tggto)のみが、ロケーションサーバー26においてGNSSクロック補正を計算するために必要になり、移動局31における既存の時間復元アルゴリズムを用いて、例えばGPS衛星信号を復号することから仮想GNSS時間を入手することができる。
【0167】
GPS時間を仮想GNSS時間として用いることは、上述される選択肢4が既存のA−GPSロケーションプロトコル(例えば上述されるRRLP)におけるガリレオ(又はその他のGNSS)の追加に関して用いられるときに特に有利になる。既存のA−GPS情報要素は、ガリレオ援助データを提供するために用いられる。ガリレオ時間に依存する援助データは、上述されるようにGPS時間に変換される(すなわち、GPS時間が仮想GNSS時間として用いられる)ため、既存のGPS情報要素は、ガリレオ関連データを移動局31に搬送するために用いることができる。
【0168】
GPS時間を仮想GNSS時間としてA−GPSに関する既存のロケーションプロトコルとともに用いることによって(すなわち、選択肢4)、GPS及びガリレオ(又はいずれかの追加GNSS)は、単一の航法衛星システムとして取り扱われる。移動局は、異なる航行時間枠を処理する必要がなく、上述されるようなGGTO関連問題による影響を受けない。ガリレオ(又はその他のいずれかのGNSS)衛星は、移動局31において追加のGPS衛星としてみられることになる。従って、既存のA−GPS実装及び追加GNSSのサポート基準に対する影響は、最小限になる。
【0169】
代替実装
本明細書に含まれるシステム、要素、及び/又はプロセスは、ハードウェアにおいて、ソフトウェアにおいて、又はその組合せにおいて実装することができ、1つ以上のプロセッサを含むことができる。プロセッサは、タスクを実行するためのデバイス及び/又は一組の機械によって読み取り可能な命令である。プロセッサは、プロセスを具体化した一連の命令を実行する能力を有するあらゆるデバイスであることができ、限定されることになしに、コンピュータ、マイクロプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、有限ステートマシン、デジタル信号プロセッサ(DSP)、又はその他の何らかのメカニズムを含む。プロセッサは、ハードウェア、ファームウェア、及び/又はソフトウェアのあらゆる組合せを含む。プロセッサは、格納された及び/又は受信された情報に基づき、実行可能なアプリケーション又は手順によって用いるために情報を計算、処理、解析、修正、変換、又は送信することによって、及び/又は出力デバイスに情報をルーティングすることによって動作する。
【0170】
実行可能なアプリケーションは、例えばユーザーコマンド又は入力に応答して、例えばオペレーティングシステム、ソフトウェアアプリケーションプログラム、又はその他の情報処理システムの機能を含む予め決められた機能を実装するための機械コード又は機械によって読み取り可能命令を具備する。
【0171】
実行可能な手順は、符号の1つのセグメント(すなわち、機械によって読み取り可能な命令)、サブルーチン、又は符号のその他の個別の部分又は実行可能なアプリケーションのうちの1つ以上の特定のプロセスを実行するための部分であり、受信された入力パラメータに基づいて(又は受信された入力パラメータに応答して)動作を実施することと、その結果得られた出力パラメータを提供すること、とを含むことができる。
【0172】
様々な実施形態においては、本発明を実装するためにハードワイヤド回路をソフトウェア命令と組み合わせて用いることができる。従って、技術は、ハードウェア回路とソフトウェアの特定の組合せ、又はデータ処理システムによって実行される命令に関する特定のソースに限定されない。さらに、本説明全体を通じて、説明を単純化するために、様々な機能及び動作はソフトウェアコードによって実行されるか又は引き起こされるものとして説明されている。しかしながら、該表現によって意味されることは、これらの機能は、プロセッサによるコードの実行の結果生じるということを当業者は認識するであろう。
【0173】
本発明の側面は、少なくとも一部分はソフトウェア内において具体化できることが本説明から明確になるであろう。すなわち、技術は、機械によって読み取り可能な媒体内に内蔵される一連の命令を実行するプロセッサに応答してコンピュータシステム又はその他のデータ処理システムにおいて実行することができる。
【0174】
機械によって読み取り可能な媒体は、機械(例えば、コンピュータ、ネットワークデバイス、パーソナルデジタルアシスタント、コンピュータ、データプロセッサ、製造工具、一組の1つ以上のプロセッサを有するいずれかのデバイス)によってアクセス可能な形態で情報を提供(すなわち、格納及び/又は送信)するいずれかのメカニズムを含む。機械によって読み取り可能な媒体は、データ処理システムによって実行されたときに本発明の様々な方法をシステムに実行させるソフトウェア及びデータを格納するために用いることができる。この実行可能なソフトウェア及び/又はデータの一部分は、様々な場所に格納することができる。例えば、機械によって読み取り可能な媒体は、記録可能な/記録不能な媒体(例えば、読取専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、磁気ディスク記憶媒体、光学記憶媒体、フラッシュメモリデバイス、非揮発性メモリ、キャッシュ、遠隔記憶デバイス、等)、及び、電気的、光学的、音響的又はその他の形態の伝搬される信号(例えば、搬送波、赤外線信号、デジタル信号、等)を含む。
【0175】
上記の明細書においては、本発明は、特定の典型的実施形態に関して説明されている。以下の請求項において詳述される本発明のより広範な精神及び適用範囲から逸脱することなしに該典型的実施形態の様々な修正を行うことが可能であることが明確になるであろう。従って、仕様及び図面は、制限することを意味するのではなくむしろ例示することを意味するものであるとみなされるべきである。
【図面の簡単な説明】
【0176】
【図1】本発明の一側面による、全地球的航法衛星システム(GNSS)、セルラーシステム、及び移動局を含む通信システムを表すブロック図である。
【図2】本発明の一側面による、現在のRRLP仕様に関する無線資源位置特定サービスプロトコル(RRLP)測位要求メッセージ及びRRLP測位応答メッセージを修正するための4つの選択肢を表す表Aを示した図である。
【図3】本発明の一側面による、4つの選択肢のうちの1つに従って現在のRRLP測位要求メッセージ及び現在のRRLP測位応答メッセージを修正するための方法を示した図である。
【図4】本発明の一側面による、現在のRRLP仕様に関するRRLP測位要求メッセージを表す表1を示した図である。
【図5】本発明の一側面による、現在のRRLP仕様に関するRRLP測位応答メッセージを表す表2を示した図である。
【図6】本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示した図である。
【図7】本発明の一側面による、選択肢1に従った修正されたRRLP測位要求メッセージを表す表3を示した図である。
【図8】本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示した図である。
【図9】本発明の一側面による、選択肢1に従った修正されたRRLP測位応答メッセージを表す表4を示した図である。
【図10】本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示した図である。
【図11】本発明の一側面による、選択肢2に従った修正されたRRLP測位要求メッセージを表す表5を示した図である。
【図12】本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示した図である。
【図13】本発明の一側面による、選択肢2に従ったRRLP測位応答メッセージを表す表6を示した図である。
【図14】本発明の一側面による、選択肢3に従った修正されたRRLP測位要求メッセージを表す表7を示した図である。
【図15】本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示した図である。
【図16】本発明の一側面による、選択肢3に従ったRRLP測位応答メッセージを表す表8を示した図である。
【図17】本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示した図である。
【図18】本発明の一側面による、選択肢4に従ったRRLP測位要求メッセージを表す表9を示した図である。
【図19】本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示した図である。
【図20】本発明の一側面による、選択肢4に従ったRRLP測位応答メッセージを表す表10を示した図である。
【図21】本発明の一側面による仮想GNSS時間を決定するためのタイミング図である。
【特許請求の範囲】
【請求項1】
通信システムであって、
第1の衛星を含む第1の衛星システムであって、前記衛星は第1のシステム時間を含む第1の仕様に従って動作するように適合化される第1の衛星システムと、第2の衛星を含む第2の衛星システムであって、前記第2の衛星は第2のシステム時間を含む第2の仕様に従って動作するように適合化される第2の衛星システムと、を含み、
移動局と通信するように適合化され、仮想全地球的航法衛星システム(GNSS)時間を定義し、第1の衛星符号位相時間を含む第1の信号を前記第1の衛星から受信し、第2の衛星符号位相時間を含む第2の信号を前記第2の衛星から受信し、前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数としてGNSS時間オフセットを計算するようにさらに適合化されたロケーションサーバーを具備する、通信システム。
【請求項2】
前記ロケーションサーバーと通信するように適合化され、前記GNSS時間オフセットに応じて移動局の位置を決定するように適合化された前記移動局をさらに具備する請求項1に記載のシステム。
【請求項3】
前記移動局は、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するように適合化され、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数である請求項2に記載のシステム。
【請求項4】
前記移動局は、前記第2の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するように適合化され、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数である請求項2に記載のシステム。
【請求項5】
前記ロケーションサーバーは、前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するように適合化される請求項1に記載のシステム。
【請求項6】
前記ロケーションサーバーは、前記第1及び第2の衛星に関するGNSSクロック補正パラメータを前記移動局に送信するようにさらに適合化される請求項5に記載のシステム。
【請求項7】
前記移動局は、前記GNSSクロック補正パラメータを前記ロケーションサーバーから受信し、前記受信に応答して前記第1及び第2の衛星の各々に関するGNSS符号位相時間オフセットを計算するように適合化される請求項6に記載のシステム。
【請求項8】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項1に記載のシステム。
【請求項9】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項1に記載のシステム。
【請求項10】
前記第1の衛星は、第1の衛星クロックを具備し、前記第1の衛星クロックは、前記第1のシステム時間からオフセットされる請求項1に記載のシステム。
【請求項11】
前記第2の衛星は、第2の衛星クロックを具備し、前記第2衛星クロックは、前記第2のシステム時間からオフセットされる請求項1に記載のシステム。
【請求項12】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義するように適合化される請求項1に記載のシステム。
【請求項13】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義するように適合化される請求項1に記載のシステム。
【請求項14】
前記ロケーションサーバーは、前記第1及び第2の衛星をGNSS識別に従って識別するように適合化される請求項1に記載のシステム。
【請求項15】
通信方法であって、
第1の衛星を含む第1の衛星システムから第1の信号を受信することであって、前記衛星は、第1のシステム時間を含む第1の仕様に従って動作するように適合化されることと、
第2の衛星を含む第2の衛星システムから第2の信号を受信することであって、前記第2の衛星は、第2のシステム時間を含む第2の仕様に従って動作するように適合化されることと、
移動局と通信するように適合化されたロケーションサーバーを提供することと、
前記ロケーションサーバーにおいて仮想全地球的航法衛星システム(GNSS)時間を定義することと、
前記ロケーションサーバーにおいて第1の衛星符号位相時間を含む第1の信号を前記第1の衛星から受信することと、
前記ロケーションサーバーにおいて第2の衛星符号位相時間を含む第2の信号を前記第2の衛星から受信することと、
前記ロケーションサーバーにおいて前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数としてGNSS時間オフセットを計算すること、とを具備する、通信方法。
【請求項16】
前記GNSS時間オフセットを移動局に送信するステップをさらに具備する請求項15に記載の方法。
【請求項17】
前記移動局において、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するステップであって、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数であるステップ、をさらに具備する請求項16に記載の方法。
【請求項18】
前記移動局において、前記第2の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するステップであって、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数であるステップ、をさらに具備する請求項16に記載の方法。
【請求項19】
前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するステップをさらに具備する請求項15に記載の方法。
【請求項20】
前記第1及び第2の衛星に関する前記GNSSクロック補正パラメータを前記移動局に送信するステップをさらに具備する請求項19に記載の方法。
【請求項21】
前記GNSSクロック補正パラメータを前記移動局において受信するステップと、
前記受信に応答して前記第1及び第2の衛星の各々に関するGNSS符号位相オフセットを計算するステップと、をさらに具備する請求項20に記載の方法。
【請求項22】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項15に記載の方法。
【請求項23】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項15に記載の方法。
【請求項24】
前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義する前記ステップをさらに具備する請求項15に記載の方法。
【請求項25】
前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義する前記ステップをさらに具備する請求項15に記載の方法。
【請求項26】
前記第1及び第2の衛星をGNSS識別に従って識別する前記ステップをさらに具備する請求項15に記載の方法。
【請求項27】
通信装置であって、
(a)移動局と通信し、
(b)仮想全地球的航法衛星システム(GNSS)時間を定義し、
(c)第1の衛星符号位相時間を含む第1の信号を第1の衛星から受信し、
(d)第2の衛星符号位相時間を含む第2の信号を第2の衛星から受信し、
(e)GNSS時間オフセットを前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数として計算するように適合化されたロケーションサーバーを具備する、通信装置。
【請求項28】
前記ロケーションサーバーは、前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するようにさらに適合化される請求項27に記載の装置。
【請求項29】
前記ロケーションサーバーは、前記第1及び第2の衛星に関する前記GNSSクロック補正パラメータを前記移動局に送信するようにさらに適合化される請求項27に記載の装置。
【請求項30】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項27に記載の装置。
【請求項31】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項27に記載の装置。
【請求項32】
前記第1の衛星は、第1の衛星クロックを具備し、前記第1の衛星クロックは、前記第1のシステム時間からオフセットされる請求項27に記載の装置。
【請求項33】
前記第2の衛星は、第2の衛星クロックを具備し、前記第2衛星クロックは、前記第2のシステム時間からオフセットされる請求項27に記載の装置。
【請求項34】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義するように適合化される請求項27に記載の装置。
【請求項35】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義するように適合化される請求項27に記載の装置。
【請求項36】
前記ロケーションサーバーは、前記第1及び第2の衛星をGNSS識別に従って識別するように適合化される請求項27に記載の装置。
【請求項37】
通信装置であって、
ロケーションサーバーと通信するように適合化された移動局であって、前記ロケーションサーバーは、
(a)仮想全地球的航法衛星システム(GNSS)時間を定義し、
(b)第1の衛星符号位相時間を含む第1の信号を第1の衛星から受信し、
(c)第2の衛星符号位相時間を含む第2の信号を第2の衛星から受信し、
(d)GNSS時間オフセットを前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数として計算するように適合化される移動局、を具備し、
前記移動局は、前記GNSS時間オフセットを前記ロケーションサーバーから受信するように及び前記受信に応答して前記移動局の位置を決定するように適合化される、通信装置。
【請求項38】
前記移動局は、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するようにさらに適合化され、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数である請求項37に記載の装置。
【請求項39】
前記移動局は、前記第2衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するようにさらに適合化され、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数である請求項37に記載の装置。
【請求項40】
前記移動局は、パソコン(PC)、デスクトップコンピュータ、ラップトップコンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパーコンピュータ、ネットワークに基づくデバイス、データプロセッサ、パーソナルデジタルアシスタント(PDA)、スマートカード、携帯電話、ページャー、又は腕時計のうちの1つを具備する請求項37に記載の装置。
【請求項1】
通信システムであって、
第1の衛星を含む第1の衛星システムであって、前記衛星は第1のシステム時間を含む第1の仕様に従って動作するように適合化される第1の衛星システムと、第2の衛星を含む第2の衛星システムであって、前記第2の衛星は第2のシステム時間を含む第2の仕様に従って動作するように適合化される第2の衛星システムと、を含み、
移動局と通信するように適合化され、仮想全地球的航法衛星システム(GNSS)時間を定義し、第1の衛星符号位相時間を含む第1の信号を前記第1の衛星から受信し、第2の衛星符号位相時間を含む第2の信号を前記第2の衛星から受信し、前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数としてGNSS時間オフセットを計算するようにさらに適合化されたロケーションサーバーを具備する、通信システム。
【請求項2】
前記ロケーションサーバーと通信するように適合化され、前記GNSS時間オフセットに応じて移動局の位置を決定するように適合化された前記移動局をさらに具備する請求項1に記載のシステム。
【請求項3】
前記移動局は、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するように適合化され、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数である請求項2に記載のシステム。
【請求項4】
前記移動局は、前記第2の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するように適合化され、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数である請求項2に記載のシステム。
【請求項5】
前記ロケーションサーバーは、前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するように適合化される請求項1に記載のシステム。
【請求項6】
前記ロケーションサーバーは、前記第1及び第2の衛星に関するGNSSクロック補正パラメータを前記移動局に送信するようにさらに適合化される請求項5に記載のシステム。
【請求項7】
前記移動局は、前記GNSSクロック補正パラメータを前記ロケーションサーバーから受信し、前記受信に応答して前記第1及び第2の衛星の各々に関するGNSS符号位相時間オフセットを計算するように適合化される請求項6に記載のシステム。
【請求項8】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項1に記載のシステム。
【請求項9】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項1に記載のシステム。
【請求項10】
前記第1の衛星は、第1の衛星クロックを具備し、前記第1の衛星クロックは、前記第1のシステム時間からオフセットされる請求項1に記載のシステム。
【請求項11】
前記第2の衛星は、第2の衛星クロックを具備し、前記第2衛星クロックは、前記第2のシステム時間からオフセットされる請求項1に記載のシステム。
【請求項12】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義するように適合化される請求項1に記載のシステム。
【請求項13】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義するように適合化される請求項1に記載のシステム。
【請求項14】
前記ロケーションサーバーは、前記第1及び第2の衛星をGNSS識別に従って識別するように適合化される請求項1に記載のシステム。
【請求項15】
通信方法であって、
第1の衛星を含む第1の衛星システムから第1の信号を受信することであって、前記衛星は、第1のシステム時間を含む第1の仕様に従って動作するように適合化されることと、
第2の衛星を含む第2の衛星システムから第2の信号を受信することであって、前記第2の衛星は、第2のシステム時間を含む第2の仕様に従って動作するように適合化されることと、
移動局と通信するように適合化されたロケーションサーバーを提供することと、
前記ロケーションサーバーにおいて仮想全地球的航法衛星システム(GNSS)時間を定義することと、
前記ロケーションサーバーにおいて第1の衛星符号位相時間を含む第1の信号を前記第1の衛星から受信することと、
前記ロケーションサーバーにおいて第2の衛星符号位相時間を含む第2の信号を前記第2の衛星から受信することと、
前記ロケーションサーバーにおいて前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数としてGNSS時間オフセットを計算すること、とを具備する、通信方法。
【請求項16】
前記GNSS時間オフセットを移動局に送信するステップをさらに具備する請求項15に記載の方法。
【請求項17】
前記移動局において、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するステップであって、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数であるステップ、をさらに具備する請求項16に記載の方法。
【請求項18】
前記移動局において、前記第2の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するステップであって、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数であるステップ、をさらに具備する請求項16に記載の方法。
【請求項19】
前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するステップをさらに具備する請求項15に記載の方法。
【請求項20】
前記第1及び第2の衛星に関する前記GNSSクロック補正パラメータを前記移動局に送信するステップをさらに具備する請求項19に記載の方法。
【請求項21】
前記GNSSクロック補正パラメータを前記移動局において受信するステップと、
前記受信に応答して前記第1及び第2の衛星の各々に関するGNSS符号位相オフセットを計算するステップと、をさらに具備する請求項20に記載の方法。
【請求項22】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項15に記載の方法。
【請求項23】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項15に記載の方法。
【請求項24】
前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義する前記ステップをさらに具備する請求項15に記載の方法。
【請求項25】
前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義する前記ステップをさらに具備する請求項15に記載の方法。
【請求項26】
前記第1及び第2の衛星をGNSS識別に従って識別する前記ステップをさらに具備する請求項15に記載の方法。
【請求項27】
通信装置であって、
(a)移動局と通信し、
(b)仮想全地球的航法衛星システム(GNSS)時間を定義し、
(c)第1の衛星符号位相時間を含む第1の信号を第1の衛星から受信し、
(d)第2の衛星符号位相時間を含む第2の信号を第2の衛星から受信し、
(e)GNSS時間オフセットを前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数として計算するように適合化されたロケーションサーバーを具備する、通信装置。
【請求項28】
前記ロケーションサーバーは、前記第1及び第2の衛星の各々に関するGNSSクロック補正パラメータを計算するようにさらに適合化される請求項27に記載の装置。
【請求項29】
前記ロケーションサーバーは、前記第1及び第2の衛星に関する前記GNSSクロック補正パラメータを前記移動局に送信するようにさらに適合化される請求項27に記載の装置。
【請求項30】
前記第1の衛星システムは、全地球測位衛星(GPS)システムをさらに具備する請求項27に記載の装置。
【請求項31】
前記第2の衛星は、ガリレオ衛星システムをさらに具備する請求項27に記載の装置。
【請求項32】
前記第1の衛星は、第1の衛星クロックを具備し、前記第1の衛星クロックは、前記第1のシステム時間からオフセットされる請求項27に記載の装置。
【請求項33】
前記第2の衛星は、第2の衛星クロックを具備し、前記第2衛星クロックは、前記第2のシステム時間からオフセットされる請求項27に記載の装置。
【請求項34】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第1のシステム時間と実質的に同一であると定義するように適合化される請求項27に記載の装置。
【請求項35】
前記ロケーションサーバーは、前記仮想GNSS時間を前記第2のシステム時間と実質的に同一であると定義するように適合化される請求項27に記載の装置。
【請求項36】
前記ロケーションサーバーは、前記第1及び第2の衛星をGNSS識別に従って識別するように適合化される請求項27に記載の装置。
【請求項37】
通信装置であって、
ロケーションサーバーと通信するように適合化された移動局であって、前記ロケーションサーバーは、
(a)仮想全地球的航法衛星システム(GNSS)時間を定義し、
(b)第1の衛星符号位相時間を含む第1の信号を第1の衛星から受信し、
(c)第2の衛星符号位相時間を含む第2の信号を第2の衛星から受信し、
(d)GNSS時間オフセットを前記仮想GNSS時間、前記第1の衛星符号位相時間及び前記第2の衛星符号位相時間の関数として計算するように適合化される移動局、を具備し、
前記移動局は、前記GNSS時間オフセットを前記ロケーションサーバーから受信するように及び前記受信に応答して前記移動局の位置を決定するように適合化される、通信装置。
【請求項38】
前記移動局は、前記第1の衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するようにさらに適合化され、前記GNSS送信時間は、前記第1の衛星に関する送信時における有効GNSS符号位相時間及び前記第1の衛星に関するGNSS符号位相時間オフセットの関数である請求項37に記載の装置。
【請求項39】
前記移動局は、前記第2衛星に関するGNSS送信時間に応じて前記移動局の位置を決定するようにさらに適合化され、前記GNSS送信時間は、前記第2の衛星に関する送信時における有効GNSS符号位相時間及び前記第2の衛星に関するGNSS符号位相時間オフセットの関数である請求項37に記載の装置。
【請求項40】
前記移動局は、パソコン(PC)、デスクトップコンピュータ、ラップトップコンピュータ、ワークステーション、ミニコンピュータ、メインフレーム、スーパーコンピュータ、ネットワークに基づくデバイス、データプロセッサ、パーソナルデジタルアシスタント(PDA)、スマートカード、携帯電話、ページャー、又は腕時計のうちの1つを具備する請求項37に記載の装置。
【図1】


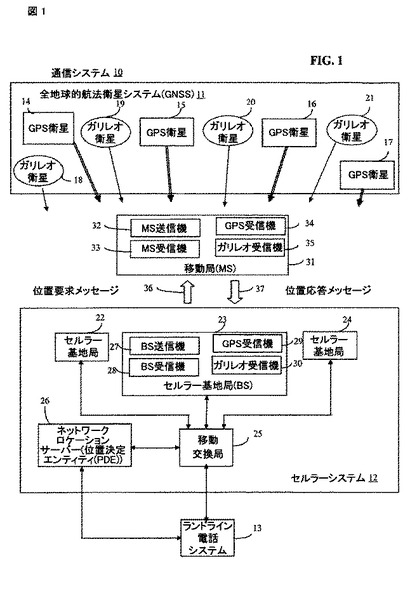
【図2】
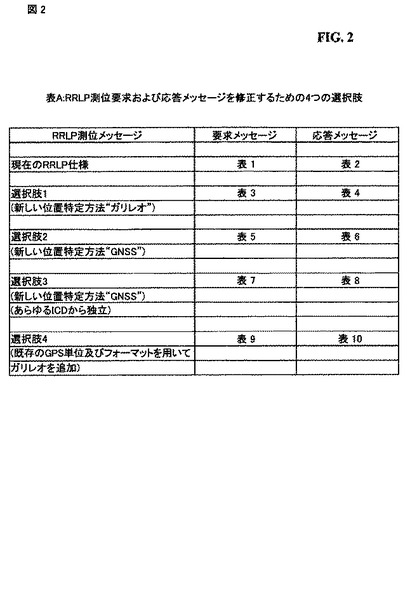
【図3】
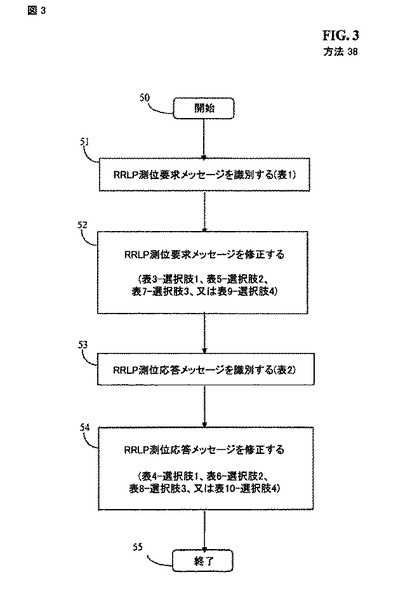
【図4】

【図5】
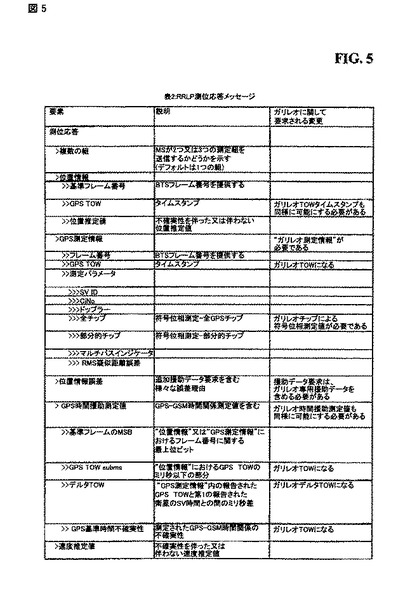
【図6】
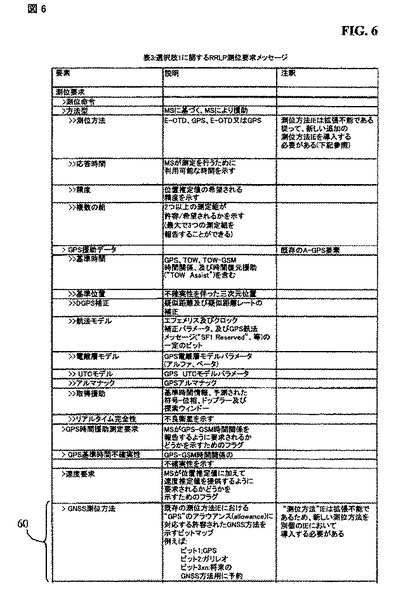
【図7】
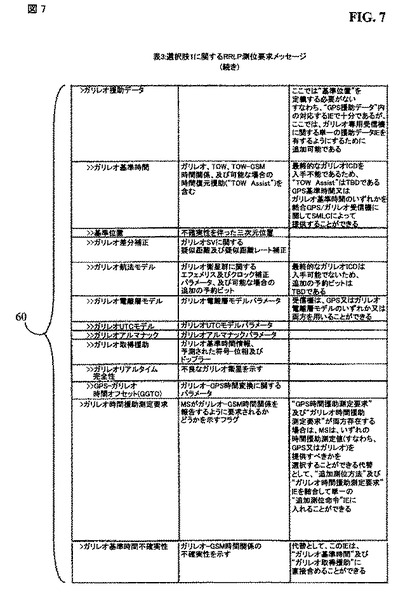
【図8】
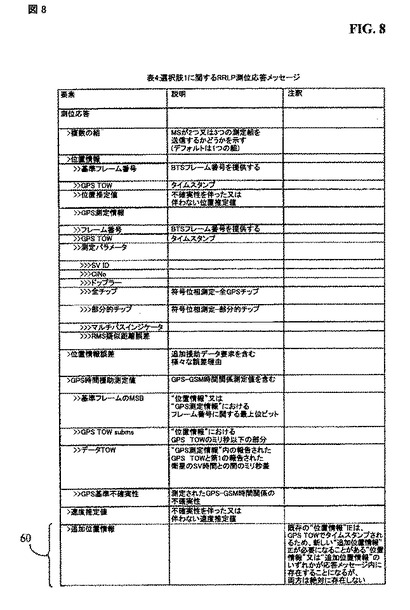
【図9】
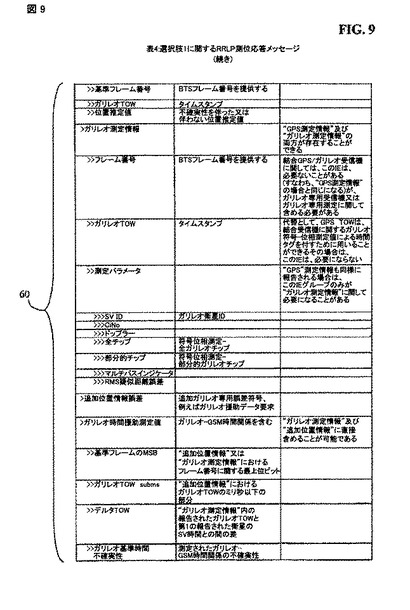
【図10】
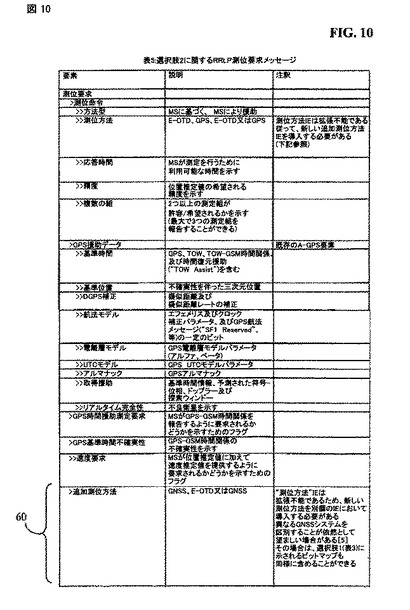
【図11】
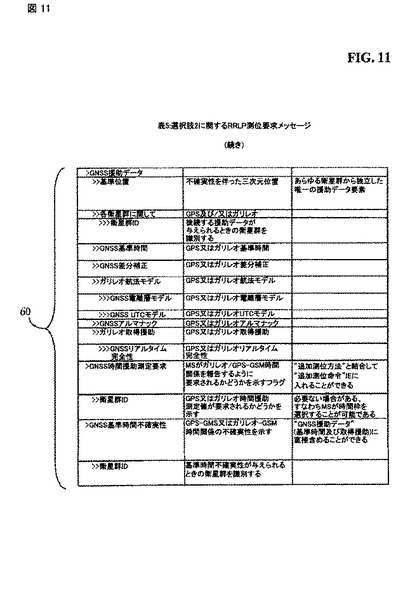
【図12】
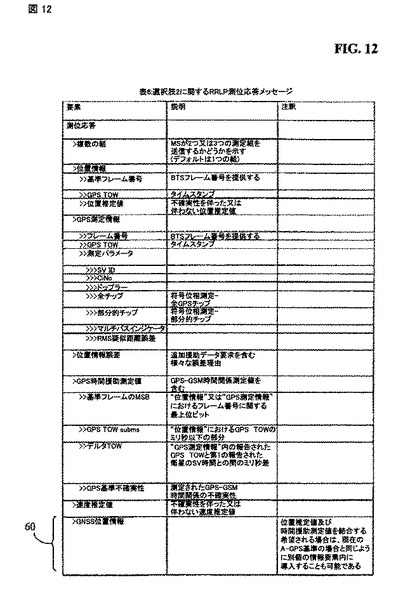
【図13】
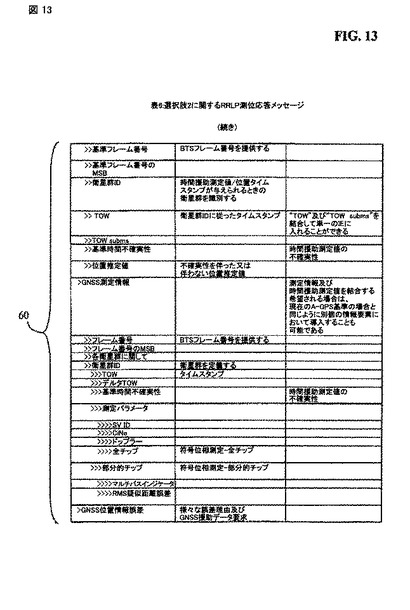
【図14】
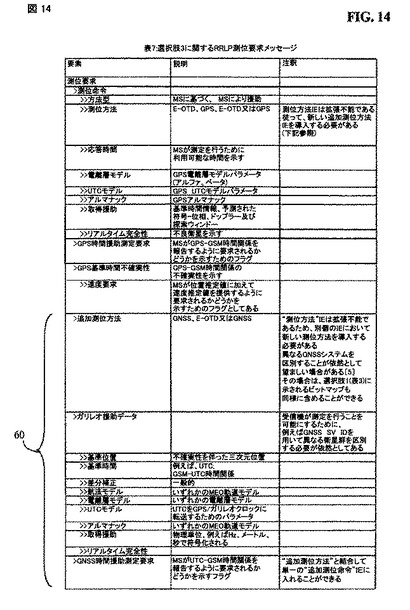
【図15】
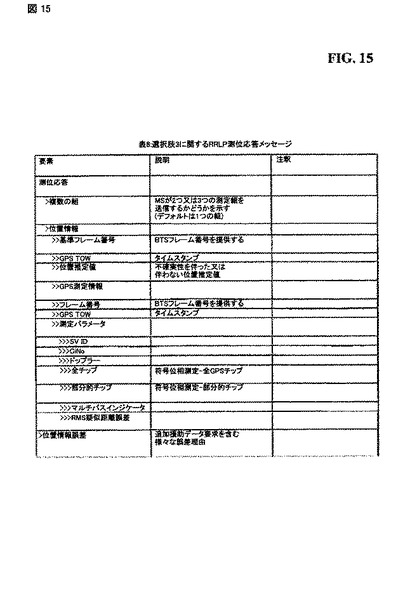
【図16】
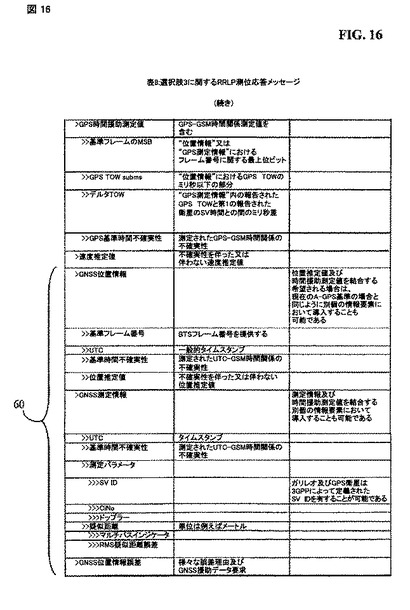
【図17】
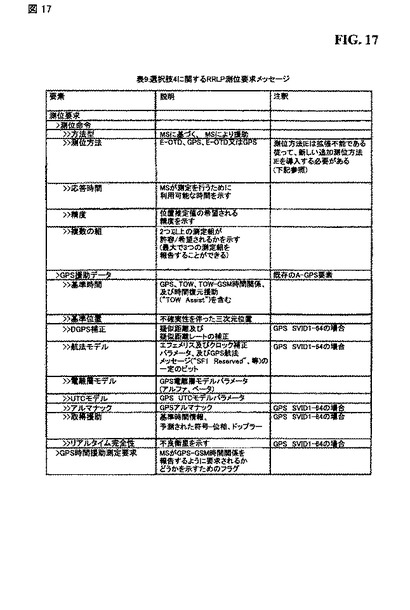
【図18】
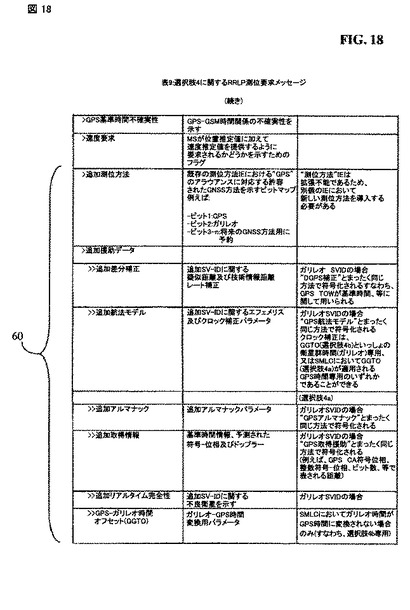
【図19】
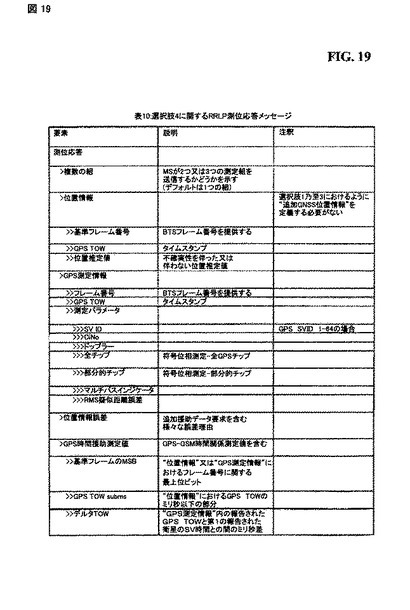
【図20】
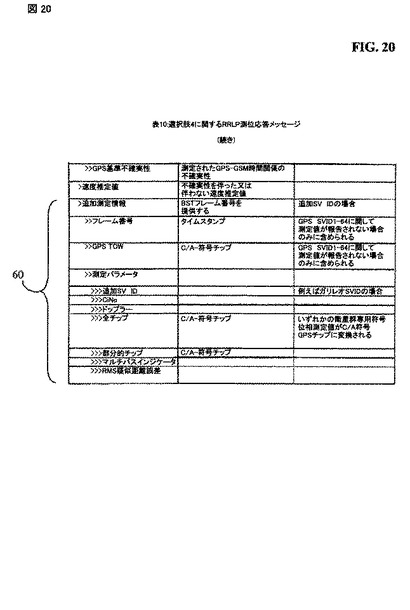
【図21】
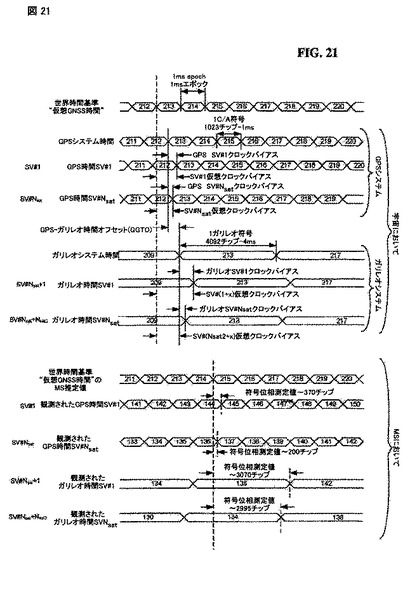
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公表番号】特表2009−530622(P2009−530622A)
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2009−500615(P2009−500615)
【出願日】平成19年3月15日(2007.3.15)
【国際出願番号】PCT/US2007/064111
【国際公開番号】WO2007/106908
【国際公開日】平成19年9月20日(2007.9.20)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成19年3月15日(2007.3.15)
【国際出願番号】PCT/US2007/064111
【国際公開番号】WO2007/106908
【国際公開日】平成19年9月20日(2007.9.20)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]