
全方向性車両玩具並びにその車輪
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全方向性車両玩具並びにその車輪に関し、特に部品数が少なくてシンプルに構成されて着実に操作可能な全方向性車両玩具並びにその車輪に関する。
【背景技術】
【0002】
本発明に関する現時点での技術水準をより十分に説明する目的で、本願で引用され或いは特定される特許、特許出願、特許公報、科学論文等の全てを、ここに、参照することでそれらの全ての説明を組入れる。
【0003】
例えば、引用文献1は、「進路の安定した自動推進式車両用車輪の改良」に係る発明であり、特にロールによる振動を防ぐために、その配置等を途切れの無い車輪周を形成するように提案されている。また、車輪の駆動中に一度に1個のロールだけをベースに係合させることによって固いベース上での駆動の際にも滑らかな運動が得られるようにするものである。
【0004】
一方、引用文献2は、モータ式車椅子に関し、特に全方向性モータ式車椅子に関する発明である。特に従来の車椅子のように前方移動、後方移動、駆動部が4つの車輪と、車輪駆動モータと、減速器とを有するものである。このようなモータ式車椅子は、一人で歩行することが困難な老人及び身体弱者が、アパート、オフィス、ショッピングモール、ホテル、病院などの狭い空間で用いるのに適しており、オフィスでの高品質な椅子および家での休憩用椅子として作用しうる。
【0005】
【特許文献1】特開昭49−134002号公報
【特許文献2】特表平10−500049号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ここで、この特許文献1は、中心部材3から延びるブラケット7によって、各ロールを個別に固定するため、固定すべきロールの数に対して、同数のブラケットを準備する必要がある。しかし、ブラケットを全てバランスよく固定させることは困難であり、また、製造工程においても工数が増加してしまい、コストも増大することとなる。
【0007】
さらに、引用文献1、2では、進行方向と平行なトレッドまたは全くトレッドの無いロールが開示されている。このため、振動が少ないという効果を有するものの適切なグリップ力が不足するという課題も生じている。
【0008】
本発明は、上述した従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決すべく本発明に係る全方向性車両玩具は、回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【0010】
また、前記中心部材は、前記車体に対して前方両端に前方左側中心部材と前方右側中心部材とが設けられ、後方両端に後方左側中心部材と後方右側中心部材とが設けられて、前方左側中心部材と前方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して前方の支持部が車体側に配置して後方の支持部が車体から離間する側となるように配置し、後方左側中心部材と後方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して後方の支持部が車体側に配置して前方の支持部が車体から離間する側となるように配置されることを特徴とする。
【0011】
さらに、前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする。
【0012】
一方、前記回転駆動部は、車輪毎に設けられることを特徴とする。
【0013】
加えて、前記回転駆動部は、無線操縦装置により駆動されることを特徴とする。
【0014】
本発明に係る全方向性車両玩具の車輪は、回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具の車輪において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【0015】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする。
【発明の効果】
【0016】
本発明に係る全方向性車両玩具並びにその車輪を用いることで、従来のブラケットによって生じる品質のばらつきや工数の長期化を防ぎコストの増大を防ぐことのできる全方向性車両玩具並びにその車輪を提供する。
【発明を実施するための最良の形態】
【0017】
以下本発明の実施の形態について複数の実施例を用いて以下に説明する。
【0018】
なお、本発明は、上記の実施の形態に限定されず、本発明の技術思想の範囲内において、実施の形態が適宜変更され得るものである。
【実施例1】
【0019】
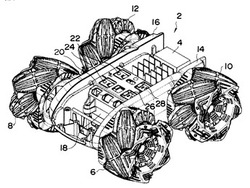
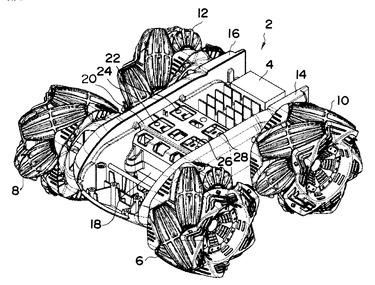
図1は、本発明に係る全方向性車両玩具の一実施例の概観図である。この全方向性車両玩具2は、車体4と、車体4の前方左側に設けられる前方左側車輪6と、車体4の前方右側に設けられる前方右側車輪8と、車体4の後方左側に設けられる後方左側車輪10と、車体4の後方右側に設けられる後方右側車輪12とから構成される。
【0020】
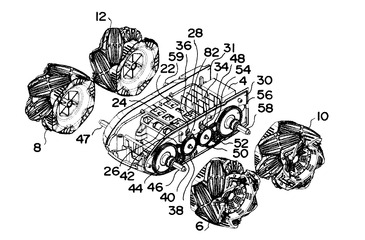
車体4は、図2に示すように側板30、31と図示されない底板の上に、ケース18とカバー20が搭載される。カバー20の下には車輪6、8、10、12の回転用に4つのモータ22、24、26、28が搭載される。
【0021】
側板30はその両側に開口部32、34が開口される。開口部32、34から、モータ26、28の回転軸が突出される。モータ26、28の回転軸の先端には、ピニオンギア36、48が装着される。ピニオンギア36は、ギア38、40、42、44を介して回転軸46を回転駆動する。回転軸46に、前方左側車輪6が装着される。
【0022】
一方、ピニオンギア48は、ギア50、52、54、56を介して回転軸58を回転駆動する。回転軸58に、後方左側車輪10が装着される。ギア38、40、42、44と、ギア50、52、54、56は減速機能を備える減速ギアである。
【0023】
側板31にも同様に減速ギアが設けられ、これらのギアを介して前方右側車輪8と後方右側車輪12とがそれぞれのギアに設けられる回転軸47、59に装着される。
【0024】
次に前方左側車輪6の拡大図を図3、図4に示す。
【0025】
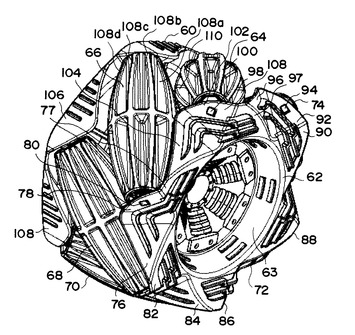
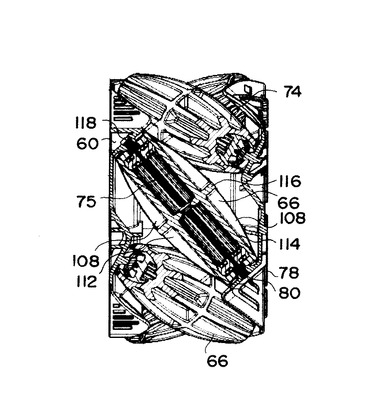
前方左側車輪6は、フランジ60とホイールカバー62から構成される。このフランジ60とホイールカバー62との間にロール64、66、68、70、72、74の6本が装着される。
【0026】
フランジ60は、フランジ中央部とそのフランジ中央部の周端部から突設される突設部として、図示される60、106、108を含めて6個突設される。この突設部のロール側の側面にロール形状に開口した開口部がそれぞれ1つずつ合計6か所設けられる。中心には回転軸46、47、58、59用の中央開口部が設けられる。また、その中央開口部の周囲にホイールカバー62との固定用のねじ穴も設けられる。
【0027】
ホイールカバー62は、中央ホイール部63と、その周囲に平板部77との中心軸用キャップの開口した開口部81を有する折り曲げ部78、折り曲げ部78に隣接する折り曲げ部76と、折り曲げ部76に隣接する平板部82と、平板部82に隣接する折り曲げ部84と、折り曲げ部84に隣接する平板部86と、さらに平板部88と、平板部88と、平板部90と、折り曲げ部92と、折り曲げ部92に隣接する折り曲げ部96と、折り曲げ部96に接続される平板部77と、平板部77に隣接される折り曲げ部98と、折り曲げ部98に連接される折り曲げ部104と、折り曲げ部104は平板部77に連結される。
折り曲げ部のうち、78、92、100に開口部が設けられる。
【0028】
ロール66を図4に示す。ロール66は、その中心に中心軸75が貫通し、中心軸75の両端にキャップ80、118が装着される。ロール66には、中心軸と平行な方向に中心から外側へ放射状にトレッド108a、108b、108c、108d等が突設される。一方、ロール66の中央の最も軸径が太い部分に沿って、中心軸75と垂直な方向にトレッド116が突設される。
【0029】
キャップ80、118は、一端が軸受けであり、他端が矩形状のカバーを備える。中心軸75にキャップ80、118を装着する際にワッシャを装着してもよい。ロール66は、中心軸75を中心に自在に回転可能である。キャップ80、118は、フランジ60から突設される突設部105に設けられる開口部(図示せず)と、ホイールカバー62の端部を折り曲げ加工した折り曲げ部78に設けられる開口部81に装着されて固定される。ここで、突設部105と折り曲げ部78は平行となるように設けられるが、前方左側車輪6の回転軸に対して傾斜する角度となる。同様に、突設部106がロール68と、突設部108がロール70と、一方、折り曲げ部102がロール64と、折り曲げ部92がロール74をそれぞれ固定する。
【0030】
ここで、前方左側車輪6と前方右側車輪8と後方左側車輪10と後方右側車輪12は、ロールが車輪の車軸と傾斜する特徴を有する。
【0031】
例えば、前方左側車輪6が地面に設置している際に、地面と接するロールの回転軸の車輪の進行方向に対する傾斜は、ロールの一方部分が車体4側に傾斜しており、ロールの他方部分が車体から離間するように配置される。
【0032】
ところで、このように傾斜したロールが装着された車輪は、車輪が回転するとロールが車輪と逆方向に回転する。このロールの逆方向回転により、ロールの回転軸と垂直に進む力である傾斜推進力が発生する。この傾斜推力は、車輪の回転方向に対して、ロールの取り付け角だけずれることとなる。
【0033】
つまり、前方左側車輪6の場合、車輪が前方に回転すると、右斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると左斜め後方向に傾斜推進力が発生する。
【0034】
以上を他の車輪について確認すると、前方右側車輪8は同様に、前方が車体4側となり、後方が車体から離間するように配置される。このため、車輪が前方に回転すると、左斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると右斜め後方向に傾斜推進力が発生する。
【0035】
一方、後方左側車輪10は、前方が車体から離間するように配置され、後方が車体4側に配置される。このため、車輪が前方に回転すると、左斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると右斜め後方向に傾斜推進力が発生する。
【0036】
さらに、後方右側車輪12は、前方が車体から離間するように配置され、後方が車体4側に配置される。このため、車輪が前方に回転すると、右斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると左斜め後方向に傾斜推進力が発生する。
【0037】
次に本玩具を動作させるためのラジオコントロールの送信器と受診器について図5、6を用いて説明する。
【0038】
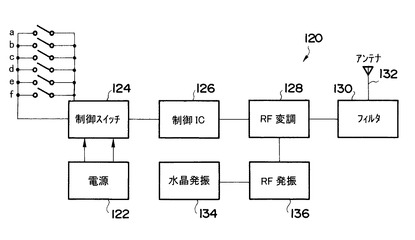
送信器120は、電源122と、制御スイッチ124と、制御IC126と、RF変調回路128と、フィルタ部130と、アンテナ132と、水晶発振子回路134と、RF発振回路136とから構成される。
【0039】
電源122は、各回路に電源を供給するものであり、具体的には9V乾電池等を用いる。
【0040】
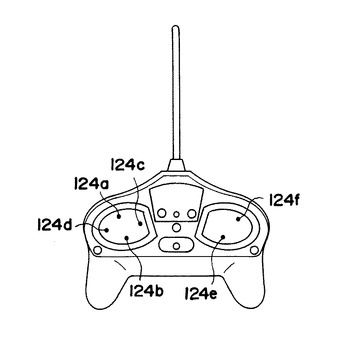
制御スイッチ124は、受信器に送信する信号を決定するスイッチである。スイッチとして、図7に示し、送信機の左側の操作ボタンが前進信号スイッチ124aにより前進信号、後進信号スイッチ124bにより後進信号、左回転信号スイッチ124cにより左回転信号、右回転信号スイッチ124dにより右回転信号、送信機の右側の操作ボタンが左移動信号スイッチ124eにより左移動信号、右移動信号スイッチ124fにより右移動信号を送信可能である。
【0041】
制御IC126は、制御スイッチ124から受信した信号を変調するための制御回路である。可変抵抗の操作による制御電圧を変換して予め定められたパルス幅やパルス本数等の変動信号を出力する回路装置である。
【0042】
RF変調回路128は、制御IC126回路で生成された信号でRF発振回路136により生成した電磁波を変調させて受信器に送信するための電波を生成する回路である。
【0043】
フィルタ部130は、RF変調回路128で生成した電磁波のうち不要な輻射を排除するためのフィルタ回路である。
【0044】
フィルタ部130の生成した電磁波はアンテナ132を介して受信器へ送信される。
【0045】
水晶発振回路134は、基本周波数のクロックを発生する回路である。
【0046】
RF発振回路136は、水晶発振回路134で発生させたクロックを増幅して電磁波とする回路である。
【0047】
以上の構成により、送信器120は、本発明に係る全方向性車両玩具を制御するラジオコントロール信号を発生させる。
【0048】
次に図6を用いて、本玩具を動作させるためのラジオコントロールの受信部139について説明する。
【0049】
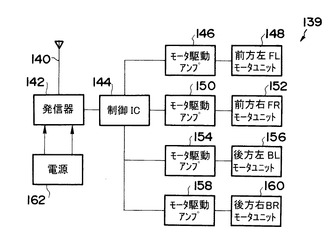
受信部139は、アンテナ140と、受信器142と、制御IC144と、モータ駆動アンプ146、150、154、158と、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160と、電源162とから構成される。この受信部139は、全方向性車両玩具2の車体4に搭載される。
【0050】
アンテナ140は、送信器120の生成した信号を受信するアンテナである。
【0051】
受信器142は、受信した電磁波から制御信号を検波する回路である。
【0052】
制御IC144は、送信器120から送信された信号に従って、駆動すべきモータとその回転方向を決定して動作信号を送信する制御回路である。
【0053】
モータ駆動アンプ146、150、154、158は、制御IC144に従って、モータを駆動させる電力を供給する増幅回路である。
【0054】
前方左モータユニット148は、前方左側車輪6を駆動するモータである。
【0055】
前方右モータユニット152は、前方右側車輪8を駆動するモータである。
【0056】
後方左モータユニット156は、後方左側車輪10を駆動するモータである。
【0057】
後方左モータユニット160は、後方左側車輪12を駆動するモータである。
【0058】
以上の構成により、受信部139は送信器120が生成する信号を受信して、全方向性車両玩具2の車体4を駆動制御する。
【0059】
続いて、本発明に係る全方向性車両玩具2の動作について図7乃至12を用いて説明する。
【0060】
【表1】

【0061】
表1に示すように前進、後進、右回転、左回転、左移動、右移動の順に説明する。
【0062】
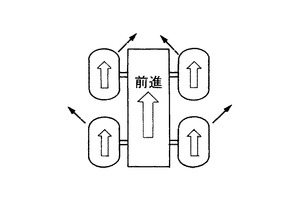
(前進)
まず、送信器120において、左側の操作ボタンにおいて前進信号スイッチ124aを選択することで、前進信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から前進信号が送信される。
【0063】
受信部139は、前進信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1に示すように受信器142より前進信号を受信すると、前方左側車輪6(FL)と、前方右側車輪8(FR)と、後方左側車輪10(BL)と、後方右側車輪12(BR)を全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、150、154、158全てへ前進駆動信号(F)を伝達する。モータ駆動アンプ146、150、154、158は、それぞれ、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160を前進回転(F)させる。
【0064】
すると、前方左側車輪6(FL)が図8のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0065】
また、前方右側車輪8(FR)が図8のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0066】
後方左側車輪10(BL)は、図8のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0067】
後方右側車輪12(BR)は、図8のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0068】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)は合成されると横向き方向の推進力は互いに打ち消され、前進方向の推進力が残る。
【0069】
また、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)右斜め前方向に傾斜推進力(右傾斜矢印YFR)もまた、合成されると横向き方向の推進力は互いに打ち消され、前進方向の推進力が残る。
【0070】
従って、全体として、車体4は前進することとなる。
【0071】
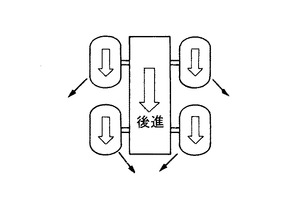
(後進)
続いて、送信器120において、左側の操作ボタンにおいて後進信号スイッチ124bを選択することで、後進信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から後進信号が送信される。
【0072】
受信部139は、後進信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1に示すように受信器142より後進信号を受信すると、前方左側車輪6(FL)と、前方右側車輪8(FR)と、後方左側車輪10(BL)と、後方右側車輪12(BR)を全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、150、154、158全てへ後進駆動信号(B)を伝達する。モータ駆動アンプ146、150、154、158は、それぞれ、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160を後進回転(B)させる。
【0073】
すると、前方左側車輪6(FL)が図9のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0074】
また、前方右側車輪8(FR)が図9のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0075】
後方左側車輪10(BL)は、図9のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0076】
後方右側車輪12(BR)は、図9のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0077】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)は合成されると横向き方向の推進力は互いに打ち消され、後進方向の推進力が残る。
【0078】
また、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)もまた、合成されると横向き方向の推進力は互いに打ち消され、後進方向の推進力が残る。
【0079】
従って、全体として、車体4は後進することとなる。
【0080】
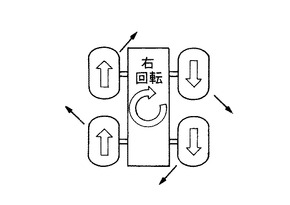
(右回転)
続いて、送信器120において、左側の操作ボタンにおいて右回転信号スイッチ124cを選択することで、右回転信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右回転進信号が送信される。
【0081】
受信部139は、右回転信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1右回転に示すように受信器142より右回転信号を受信すると、前方左側車輪6(FL)と後方左側車輪10(BL)とを前進回転(F)させと、前方右側車輪8(FR)と後方右側車輪12(BR)を全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、154へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、158へ後進駆動信号(B)を伝達する。
【0082】
モータ駆動アンプ146、154は、前方左モータユニット148と、後方左モータユニット156とを前進回転(F)させ、モータ駆動アンプ150、158は、それぞれ、前方右モータユニット152と、後方左モータユニット160を後進回転(B)させる。
【0083】
すると、前方左側車輪6(FL)が図10のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0084】
また、前方右側車輪8(FR)が図10のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0085】
後方左側車輪10(BL)は、図10のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0086】
後方右側車輪12(BR)は、図10のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0087】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)とが合成されると車体4の中心を軸として右方向に回転させる推進力が残る。
【0088】
従って、全体として、車体4は右回転することとなる。
【0089】
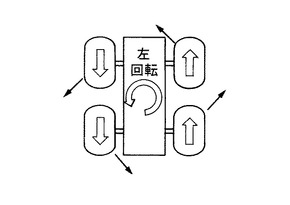
(左回転)
続いて、送信器120において、左側の操作ボタンにおいて左回転信号スイッチ124dを選択することで、左回転信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左回転進信号が送信される。
【0090】
受信部139は、左回転信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1左回転に示すように受信器142より左回転信号を受信すると、前方左側車輪6(FL)と後方左側車輪10(BL)とを後進回転(B)させと、前方右側車輪8(FR)と後方右側車輪12(BR)を全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、154へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、158へ前進駆動信号(F)を伝達する。
【0091】
モータ駆動アンプ146、154は、前方左モータユニット148と、後方左モータユニット156とを後進回転(B)させ、モータ駆動アンプ150、158は、それぞれ、前方右モータユニット152と、後方左モータユニット160を前進回転(F)させる。
【0092】
すると、前方左側車輪6(FL)が図11のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0093】
また、前方右側車輪8(FR)が図11のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0094】
後方左側車輪10(BL)は、図11のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0095】
後方右側車輪12(BR)は、図11のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0096】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると車体4の中心を軸として左方向に回転させる推進力が残る。
【0097】
従って、全体として、車体4は左回転することとなる。
【0098】
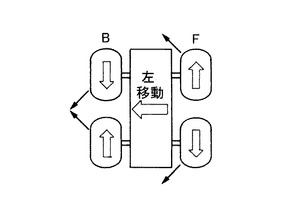
(左移動)
続いて、送信器120において、右側の操作ボタンにおいて左移動信号スイッチ124eを選択することで、左移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左移動信号が送信される。
【0099】
受信部139は、左移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1左移動に示すように受信器142より左移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を後進回転(B)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、154へ前進駆動信号(F)を伝達する。
【0100】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを後進回転(B)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を前進回転(F)させる。
【0101】
すると、前方左側車輪6(FL)が図12のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0102】
また、前方右側車輪8(FR)が図12のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0103】
後方左側車輪10(BL)は、図12のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0104】
後方右側車輪12(BR)は、図12のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0105】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)とを合成されると前方左側車輪6(FL)の後方向推進力と後方左側車輪10(BL)前方向推進力が打ち消しあい、左方向推進力のみとなる。
【0106】
また、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)とが合成されると前方左側車輪8(FR)の前方向推進力と後方左側車輪12(BR)後方向推進力が打ち消しあい、左方向推進力のみとなる。
【0107】
従って、全体として、車体4は左移動することとなる。
【0108】
(右移動)
続いて、送信器120において、右側の操作ボタンにおいて右移動信号スイッチ124fを選択することで、右移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右移動信号が送信される。
【0109】
受信部139は、右移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1右移動に示すように受信器142より右移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を前進回転(F)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、154へ後進駆動信号(B)を伝達する。
【0110】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを前進回転(F)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を後進回転(B)させる。
【0111】
すると、前方左側車輪6(FL)が図13のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0112】
また、前方右側車輪8(FR)が図13のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0113】
後方左側車輪10(BL)は、図13のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0114】
後方右側車輪12(BR)は、図13のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0115】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)とを合成されると前方左側車輪6(FL)の前方向推進力と後方左側車輪10(BL)後方向推進力が打ち消しあい、右方向推進力のみとなる。
【0116】
また、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると前方左側車輪8(FR)の後方向推進力と後方左側車輪12(BR)前方向推進力が打ち消しあい、右方向推進力のみとなる。
【0117】
従って、全体として、車体4は右移動することとなる。
【0118】
以上、本願のような制御を行うことで、前進、後進、右回転、左回転、左移動、右移動が、従来のブラケットによって生じる品質のばらつきや工数の長期化を防ぎコストの増大を防ぐことのできる全方向性車両玩具並びにその車輪を提供することができる。
【実施例2】
【0119】
次に、例えば、信号スイッチ124c〜124fに右回転、左回転、左移動、右移動に代わり、右前移動、左前移動、右後移動、左後移動に置き換え、制御IC144の制御プログラムを変更することで以下のような動作を行わせることも可能となる。
【0120】
【表2】
【0121】
(右前移動)
送信器120において、右側の操作ボタンにおいて右前移動信号スイッチ124cを選択することで、右前移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右前移動信号が送信される。
【0122】
受信部139は、右前移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2右前移動に示すように受信器142より右前移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を前進回転(F)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て停止(STOP)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、154へ停止信号(STOP)を伝達する。
【0123】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを前進回転(F)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を停止(STOP)させる。
【0124】
すると、前方左側車輪6(FL)が前回転し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0125】
また、前方右側車輪8(FR)が停止する。
【0126】
後方左側車輪10(BL)は、停止する。
【0127】
後方右側車輪12(BR)は、前回転し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0128】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると共に右斜め前方向に傾斜推進力(右傾斜矢印YFR)であるので、右斜め前方向に傾斜推進力のみとなる。
【0129】
従って、全体として、車体4は右前移動することとなる。
【0130】
(左前移動)
続いて、送信器120において、右側の操作ボタンにおいて左前移動信号スイッチ124dを選択することで、左前移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左前移動信号が送信される。
【0131】
受信部139は、左前移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2左前移動に示すように受信器142より左前移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を停止(STOP)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ停止信号(STOP)を伝達し、モータ駆動アンプ150、154へ前進駆動信号(F)を伝達する。
【0132】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを停止(STOP)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を前進回転(F)させる。
【0133】
すると、前方左側車輪6(FL)が停止する。
【0134】
また、前方右側車輪8(FR)が前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0135】
後方左側車輪10(BL)は、前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0136】
後方右側車輪12(BR)は、停止する。
【0137】
ここで、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)とを合成されると、左前方向推進力のみとなる。
【0138】
従って、全体として、車体4は左前移動することとなる。
【0139】
(右後移動)
続いて、送信器120において、右後側の操作ボタンにおいて右後移動信号スイッチ124eを選択することで、右後移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右後移動信号が送信される。
【0140】
受信部139は、右後移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2右後移動に示すように受信器142より右後移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を停止(STOP)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ停止信号(STOP)を伝達し、モータ駆動アンプ150、154へ後進駆動信号(B)を伝達する。
【0141】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを停止(STOP)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を後進回転(B)させる。
【0142】
すると、前方左側車輪6(FL)が停止する。
【0143】
また、前方右側車輪8(FR)が後回転し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0144】
後方左側車輪10(BL)は、後回転し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0145】
後方右側車輪12(BR)は、停止する。
【0146】
ここで、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)とを合成されると、右後方向推進力のみとなる。
【0147】
従って、全体として、車体4は右後移動することとなる。
【0148】
(左後移動)
送信器120において、左側の操作ボタンにおいて左後移動信号スイッチ124fを選択することで、左後移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左後移動信号が送信される。
【0149】
受信部139は、左後移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2左後移動に示すように受信器142より左後移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を後進回転(B)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て停止(STOP)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、154へ停止信号(STOP)を伝達する。
【0150】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを後進回転(B)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を停止(STOP)させる。
【0151】
すると、前方左側車輪6(FL)が後回転し、左斜め後方向に傾斜推進力(右傾斜矢印YBL)が発生する。
【0152】
また、前方右側車輪8(FR)が停止する。
【0153】
後方左側車輪10(BL)は、停止する。
【0154】
後方右側車輪12(BR)は、後回転し、左斜め後方向に傾斜推進力(右傾斜矢印YBL)が発生する。
【0155】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(右傾斜矢印YBL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(右傾斜矢印YBL)とが合成されると共に左斜め後方向に傾斜推進力(右傾斜矢印YBL)であるので、右斜め前方向に傾斜推進力のみとなる。
【0156】
従って、全体として、車体4は左後移動することとなる。
【図面の簡単な説明】
【0157】
【図1】本発明に係る全方向性車両玩具の一実施例の概観図である。
【図2】本発明に係る全方向性車両玩具の一実施例の分解図である。
【図3】本発明に係る全方向性車両玩具の一実施例のタイヤの概観図である。
【図4】本発明に係る全方向性車両玩具の一実施例のタイヤの断面図である。
【図5】本発明に係る全方向性車両玩具の一実施例の送信器である。
【図6】本発明に係る全方向性車両玩具の一実施例の受信部である。
【図7】本発明に係る全方向性車両玩具の一実施例の送信器である。
【図8】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図9】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図10】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図11】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図12】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図13】本発明に係る全方向性車両玩具の一実施例の動作図である。
【符号の説明】
【0158】
2 全方向性車両玩具
4 車体
6 前方左側車輪
8 前方右側車輪
10 後方左側車輪
12 後方右側車輪
18 ケース
20 カバー
22、24、26、28 モータ
30、31 側板
32、34 開口部
36、48 ピニオンギア
38、40、42、44 ギア
46、47、58、59 回転軸
50、52、54、56 ギア
58 回転軸
60 フランジ
62 ホイールカバー
64、66、68、70、72、74 ロール
62 ホイールカバー
63 中央ホイール部
75 中心軸
76 折り曲げ部
78 折り曲げ部
77 平板部
78、92、100 折り曲げ部
80、118 キャップ
81 開口部
82 平板部
84 折り曲げ部
86 平板部
88 平板部
90 平板部
92 折り曲げ部
96 折り曲げ部
98 折り曲げ部
102 折り曲げ部
104 折り曲げ部
105、106、108 突設部
108a、108b、108c、108d トレッド
116 トレッド
120 送信器
122 電源
124 制御スイッチ
124a〜124f 信号スイッチ
124a 前進信号スイッチ
124b 後進信号スイッチ
124c 右回転信号スイッチ
124d 左前移動信号スイッチ
124d 左回転信号スイッチ
124e 左移動信号スイッチ
124e 右後移動信号スイッチ
124f 右移動信号スイッチ
124f 左後移動信号スイッチ
126 制御IC
128 RF変調回路
130 フィルタ部
132 アンテナ
134 水晶発振回路
136 RF発振回路
139 受信部
140 アンテナ
142 受信器
144 制御IC
146、150、154、158 モータ駆動アンプ
148 前方左モータユニット
152 前方右モータユニット
156 後方左モータユニット
160 後方左モータユニット
162 電源
【技術分野】
【0001】
本発明は、全方向性車両玩具並びにその車輪に関し、特に部品数が少なくてシンプルに構成されて着実に操作可能な全方向性車両玩具並びにその車輪に関する。
【背景技術】
【0002】
本発明に関する現時点での技術水準をより十分に説明する目的で、本願で引用され或いは特定される特許、特許出願、特許公報、科学論文等の全てを、ここに、参照することでそれらの全ての説明を組入れる。
【0003】
例えば、引用文献1は、「進路の安定した自動推進式車両用車輪の改良」に係る発明であり、特にロールによる振動を防ぐために、その配置等を途切れの無い車輪周を形成するように提案されている。また、車輪の駆動中に一度に1個のロールだけをベースに係合させることによって固いベース上での駆動の際にも滑らかな運動が得られるようにするものである。
【0004】
一方、引用文献2は、モータ式車椅子に関し、特に全方向性モータ式車椅子に関する発明である。特に従来の車椅子のように前方移動、後方移動、駆動部が4つの車輪と、車輪駆動モータと、減速器とを有するものである。このようなモータ式車椅子は、一人で歩行することが困難な老人及び身体弱者が、アパート、オフィス、ショッピングモール、ホテル、病院などの狭い空間で用いるのに適しており、オフィスでの高品質な椅子および家での休憩用椅子として作用しうる。
【0005】
【特許文献1】特開昭49−134002号公報
【特許文献2】特表平10−500049号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ここで、この特許文献1は、中心部材3から延びるブラケット7によって、各ロールを個別に固定するため、固定すべきロールの数に対して、同数のブラケットを準備する必要がある。しかし、ブラケットを全てバランスよく固定させることは困難であり、また、製造工程においても工数が増加してしまい、コストも増大することとなる。
【0007】
さらに、引用文献1、2では、進行方向と平行なトレッドまたは全くトレッドの無いロールが開示されている。このため、振動が少ないという効果を有するものの適切なグリップ力が不足するという課題も生じている。
【0008】
本発明は、上述した従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決すべく本発明に係る全方向性車両玩具は、回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【0010】
また、前記中心部材は、前記車体に対して前方両端に前方左側中心部材と前方右側中心部材とが設けられ、後方両端に後方左側中心部材と後方右側中心部材とが設けられて、前方左側中心部材と前方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して前方の支持部が車体側に配置して後方の支持部が車体から離間する側となるように配置し、後方左側中心部材と後方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して後方の支持部が車体側に配置して前方の支持部が車体から離間する側となるように配置されることを特徴とする。
【0011】
さらに、前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする。
【0012】
一方、前記回転駆動部は、車輪毎に設けられることを特徴とする。
【0013】
加えて、前記回転駆動部は、無線操縦装置により駆動されることを特徴とする。
【0014】
本発明に係る全方向性車両玩具の車輪は、回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具の車輪において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
【0015】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする。
【発明の効果】
【0016】
本発明に係る全方向性車両玩具並びにその車輪を用いることで、従来のブラケットによって生じる品質のばらつきや工数の長期化を防ぎコストの増大を防ぐことのできる全方向性車両玩具並びにその車輪を提供する。
【発明を実施するための最良の形態】
【0017】
以下本発明の実施の形態について複数の実施例を用いて以下に説明する。
【0018】
なお、本発明は、上記の実施の形態に限定されず、本発明の技術思想の範囲内において、実施の形態が適宜変更され得るものである。
【実施例1】
【0019】
図1は、本発明に係る全方向性車両玩具の一実施例の概観図である。この全方向性車両玩具2は、車体4と、車体4の前方左側に設けられる前方左側車輪6と、車体4の前方右側に設けられる前方右側車輪8と、車体4の後方左側に設けられる後方左側車輪10と、車体4の後方右側に設けられる後方右側車輪12とから構成される。
【0020】
車体4は、図2に示すように側板30、31と図示されない底板の上に、ケース18とカバー20が搭載される。カバー20の下には車輪6、8、10、12の回転用に4つのモータ22、24、26、28が搭載される。
【0021】
側板30はその両側に開口部32、34が開口される。開口部32、34から、モータ26、28の回転軸が突出される。モータ26、28の回転軸の先端には、ピニオンギア36、48が装着される。ピニオンギア36は、ギア38、40、42、44を介して回転軸46を回転駆動する。回転軸46に、前方左側車輪6が装着される。
【0022】
一方、ピニオンギア48は、ギア50、52、54、56を介して回転軸58を回転駆動する。回転軸58に、後方左側車輪10が装着される。ギア38、40、42、44と、ギア50、52、54、56は減速機能を備える減速ギアである。
【0023】
側板31にも同様に減速ギアが設けられ、これらのギアを介して前方右側車輪8と後方右側車輪12とがそれぞれのギアに設けられる回転軸47、59に装着される。
【0024】
次に前方左側車輪6の拡大図を図3、図4に示す。
【0025】
前方左側車輪6は、フランジ60とホイールカバー62から構成される。このフランジ60とホイールカバー62との間にロール64、66、68、70、72、74の6本が装着される。
【0026】
フランジ60は、フランジ中央部とそのフランジ中央部の周端部から突設される突設部として、図示される60、106、108を含めて6個突設される。この突設部のロール側の側面にロール形状に開口した開口部がそれぞれ1つずつ合計6か所設けられる。中心には回転軸46、47、58、59用の中央開口部が設けられる。また、その中央開口部の周囲にホイールカバー62との固定用のねじ穴も設けられる。
【0027】
ホイールカバー62は、中央ホイール部63と、その周囲に平板部77との中心軸用キャップの開口した開口部81を有する折り曲げ部78、折り曲げ部78に隣接する折り曲げ部76と、折り曲げ部76に隣接する平板部82と、平板部82に隣接する折り曲げ部84と、折り曲げ部84に隣接する平板部86と、さらに平板部88と、平板部88と、平板部90と、折り曲げ部92と、折り曲げ部92に隣接する折り曲げ部96と、折り曲げ部96に接続される平板部77と、平板部77に隣接される折り曲げ部98と、折り曲げ部98に連接される折り曲げ部104と、折り曲げ部104は平板部77に連結される。
折り曲げ部のうち、78、92、100に開口部が設けられる。
【0028】
ロール66を図4に示す。ロール66は、その中心に中心軸75が貫通し、中心軸75の両端にキャップ80、118が装着される。ロール66には、中心軸と平行な方向に中心から外側へ放射状にトレッド108a、108b、108c、108d等が突設される。一方、ロール66の中央の最も軸径が太い部分に沿って、中心軸75と垂直な方向にトレッド116が突設される。
【0029】
キャップ80、118は、一端が軸受けであり、他端が矩形状のカバーを備える。中心軸75にキャップ80、118を装着する際にワッシャを装着してもよい。ロール66は、中心軸75を中心に自在に回転可能である。キャップ80、118は、フランジ60から突設される突設部105に設けられる開口部(図示せず)と、ホイールカバー62の端部を折り曲げ加工した折り曲げ部78に設けられる開口部81に装着されて固定される。ここで、突設部105と折り曲げ部78は平行となるように設けられるが、前方左側車輪6の回転軸に対して傾斜する角度となる。同様に、突設部106がロール68と、突設部108がロール70と、一方、折り曲げ部102がロール64と、折り曲げ部92がロール74をそれぞれ固定する。
【0030】
ここで、前方左側車輪6と前方右側車輪8と後方左側車輪10と後方右側車輪12は、ロールが車輪の車軸と傾斜する特徴を有する。
【0031】
例えば、前方左側車輪6が地面に設置している際に、地面と接するロールの回転軸の車輪の進行方向に対する傾斜は、ロールの一方部分が車体4側に傾斜しており、ロールの他方部分が車体から離間するように配置される。
【0032】
ところで、このように傾斜したロールが装着された車輪は、車輪が回転するとロールが車輪と逆方向に回転する。このロールの逆方向回転により、ロールの回転軸と垂直に進む力である傾斜推進力が発生する。この傾斜推力は、車輪の回転方向に対して、ロールの取り付け角だけずれることとなる。
【0033】
つまり、前方左側車輪6の場合、車輪が前方に回転すると、右斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると左斜め後方向に傾斜推進力が発生する。
【0034】
以上を他の車輪について確認すると、前方右側車輪8は同様に、前方が車体4側となり、後方が車体から離間するように配置される。このため、車輪が前方に回転すると、左斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると右斜め後方向に傾斜推進力が発生する。
【0035】
一方、後方左側車輪10は、前方が車体から離間するように配置され、後方が車体4側に配置される。このため、車輪が前方に回転すると、左斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると右斜め後方向に傾斜推進力が発生する。
【0036】
さらに、後方右側車輪12は、前方が車体から離間するように配置され、後方が車体4側に配置される。このため、車輪が前方に回転すると、右斜め前方向に傾斜推進力が発生する。逆に車輪が後方に回転すると左斜め後方向に傾斜推進力が発生する。
【0037】
次に本玩具を動作させるためのラジオコントロールの送信器と受診器について図5、6を用いて説明する。
【0038】
送信器120は、電源122と、制御スイッチ124と、制御IC126と、RF変調回路128と、フィルタ部130と、アンテナ132と、水晶発振子回路134と、RF発振回路136とから構成される。
【0039】
電源122は、各回路に電源を供給するものであり、具体的には9V乾電池等を用いる。
【0040】
制御スイッチ124は、受信器に送信する信号を決定するスイッチである。スイッチとして、図7に示し、送信機の左側の操作ボタンが前進信号スイッチ124aにより前進信号、後進信号スイッチ124bにより後進信号、左回転信号スイッチ124cにより左回転信号、右回転信号スイッチ124dにより右回転信号、送信機の右側の操作ボタンが左移動信号スイッチ124eにより左移動信号、右移動信号スイッチ124fにより右移動信号を送信可能である。
【0041】
制御IC126は、制御スイッチ124から受信した信号を変調するための制御回路である。可変抵抗の操作による制御電圧を変換して予め定められたパルス幅やパルス本数等の変動信号を出力する回路装置である。
【0042】
RF変調回路128は、制御IC126回路で生成された信号でRF発振回路136により生成した電磁波を変調させて受信器に送信するための電波を生成する回路である。
【0043】
フィルタ部130は、RF変調回路128で生成した電磁波のうち不要な輻射を排除するためのフィルタ回路である。
【0044】
フィルタ部130の生成した電磁波はアンテナ132を介して受信器へ送信される。
【0045】
水晶発振回路134は、基本周波数のクロックを発生する回路である。
【0046】
RF発振回路136は、水晶発振回路134で発生させたクロックを増幅して電磁波とする回路である。
【0047】
以上の構成により、送信器120は、本発明に係る全方向性車両玩具を制御するラジオコントロール信号を発生させる。
【0048】
次に図6を用いて、本玩具を動作させるためのラジオコントロールの受信部139について説明する。
【0049】
受信部139は、アンテナ140と、受信器142と、制御IC144と、モータ駆動アンプ146、150、154、158と、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160と、電源162とから構成される。この受信部139は、全方向性車両玩具2の車体4に搭載される。
【0050】
アンテナ140は、送信器120の生成した信号を受信するアンテナである。
【0051】
受信器142は、受信した電磁波から制御信号を検波する回路である。
【0052】
制御IC144は、送信器120から送信された信号に従って、駆動すべきモータとその回転方向を決定して動作信号を送信する制御回路である。
【0053】
モータ駆動アンプ146、150、154、158は、制御IC144に従って、モータを駆動させる電力を供給する増幅回路である。
【0054】
前方左モータユニット148は、前方左側車輪6を駆動するモータである。
【0055】
前方右モータユニット152は、前方右側車輪8を駆動するモータである。
【0056】
後方左モータユニット156は、後方左側車輪10を駆動するモータである。
【0057】
後方左モータユニット160は、後方左側車輪12を駆動するモータである。
【0058】
以上の構成により、受信部139は送信器120が生成する信号を受信して、全方向性車両玩具2の車体4を駆動制御する。
【0059】
続いて、本発明に係る全方向性車両玩具2の動作について図7乃至12を用いて説明する。
【0060】
【表1】
【0061】
表1に示すように前進、後進、右回転、左回転、左移動、右移動の順に説明する。
【0062】
(前進)
まず、送信器120において、左側の操作ボタンにおいて前進信号スイッチ124aを選択することで、前進信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から前進信号が送信される。
【0063】
受信部139は、前進信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1に示すように受信器142より前進信号を受信すると、前方左側車輪6(FL)と、前方右側車輪8(FR)と、後方左側車輪10(BL)と、後方右側車輪12(BR)を全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、150、154、158全てへ前進駆動信号(F)を伝達する。モータ駆動アンプ146、150、154、158は、それぞれ、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160を前進回転(F)させる。
【0064】
すると、前方左側車輪6(FL)が図8のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0065】
また、前方右側車輪8(FR)が図8のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0066】
後方左側車輪10(BL)は、図8のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0067】
後方右側車輪12(BR)は、図8のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0068】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)は合成されると横向き方向の推進力は互いに打ち消され、前進方向の推進力が残る。
【0069】
また、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)右斜め前方向に傾斜推進力(右傾斜矢印YFR)もまた、合成されると横向き方向の推進力は互いに打ち消され、前進方向の推進力が残る。
【0070】
従って、全体として、車体4は前進することとなる。
【0071】
(後進)
続いて、送信器120において、左側の操作ボタンにおいて後進信号スイッチ124bを選択することで、後進信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から後進信号が送信される。
【0072】
受信部139は、後進信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1に示すように受信器142より後進信号を受信すると、前方左側車輪6(FL)と、前方右側車輪8(FR)と、後方左側車輪10(BL)と、後方右側車輪12(BR)を全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、150、154、158全てへ後進駆動信号(B)を伝達する。モータ駆動アンプ146、150、154、158は、それぞれ、前方左モータユニット148と、前方右モータユニット152と、後方左モータユニット156と、後方左モータユニット160を後進回転(B)させる。
【0073】
すると、前方左側車輪6(FL)が図9のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0074】
また、前方右側車輪8(FR)が図9のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0075】
後方左側車輪10(BL)は、図9のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0076】
後方右側車輪12(BR)は、図9のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0077】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)は合成されると横向き方向の推進力は互いに打ち消され、後進方向の推進力が残る。
【0078】
また、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)もまた、合成されると横向き方向の推進力は互いに打ち消され、後進方向の推進力が残る。
【0079】
従って、全体として、車体4は後進することとなる。
【0080】
(右回転)
続いて、送信器120において、左側の操作ボタンにおいて右回転信号スイッチ124cを選択することで、右回転信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右回転進信号が送信される。
【0081】
受信部139は、右回転信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1右回転に示すように受信器142より右回転信号を受信すると、前方左側車輪6(FL)と後方左側車輪10(BL)とを前進回転(F)させと、前方右側車輪8(FR)と後方右側車輪12(BR)を全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、154へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、158へ後進駆動信号(B)を伝達する。
【0082】
モータ駆動アンプ146、154は、前方左モータユニット148と、後方左モータユニット156とを前進回転(F)させ、モータ駆動アンプ150、158は、それぞれ、前方右モータユニット152と、後方左モータユニット160を後進回転(B)させる。
【0083】
すると、前方左側車輪6(FL)が図10のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0084】
また、前方右側車輪8(FR)が図10のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0085】
後方左側車輪10(BL)は、図10のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0086】
後方右側車輪12(BR)は、図10のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0087】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)とが合成されると車体4の中心を軸として右方向に回転させる推進力が残る。
【0088】
従って、全体として、車体4は右回転することとなる。
【0089】
(左回転)
続いて、送信器120において、左側の操作ボタンにおいて左回転信号スイッチ124dを選択することで、左回転信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左回転進信号が送信される。
【0090】
受信部139は、左回転信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1左回転に示すように受信器142より左回転信号を受信すると、前方左側車輪6(FL)と後方左側車輪10(BL)とを後進回転(B)させと、前方右側車輪8(FR)と後方右側車輪12(BR)を全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、154へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、158へ前進駆動信号(F)を伝達する。
【0091】
モータ駆動アンプ146、154は、前方左モータユニット148と、後方左モータユニット156とを後進回転(B)させ、モータ駆動アンプ150、158は、それぞれ、前方右モータユニット152と、後方左モータユニット160を前進回転(F)させる。
【0092】
すると、前方左側車輪6(FL)が図11のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0093】
また、前方右側車輪8(FR)が図11のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0094】
後方左側車輪10(BL)は、図11のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0095】
後方右側車輪12(BR)は、図11のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0096】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると車体4の中心を軸として左方向に回転させる推進力が残る。
【0097】
従って、全体として、車体4は左回転することとなる。
【0098】
(左移動)
続いて、送信器120において、右側の操作ボタンにおいて左移動信号スイッチ124eを選択することで、左移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左移動信号が送信される。
【0099】
受信部139は、左移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1左移動に示すように受信器142より左移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を後進回転(B)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、154へ前進駆動信号(F)を伝達する。
【0100】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを後進回転(B)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を前進回転(F)させる。
【0101】
すると、前方左側車輪6(FL)が図12のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0102】
また、前方右側車輪8(FR)が図12のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0103】
後方左側車輪10(BL)は、図12のように前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0104】
後方右側車輪12(BR)は、図12のように後回転(白矢印方向)し、左斜め後方向に傾斜推進力(左傾斜矢印YBL)が発生する。
【0105】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)とを合成されると前方左側車輪6(FL)の後方向推進力と後方左側車輪10(BL)前方向推進力が打ち消しあい、左方向推進力のみとなる。
【0106】
また、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(左傾斜矢印YBL)とが合成されると前方左側車輪8(FR)の前方向推進力と後方左側車輪12(BR)後方向推進力が打ち消しあい、左方向推進力のみとなる。
【0107】
従って、全体として、車体4は左移動することとなる。
【0108】
(右移動)
続いて、送信器120において、右側の操作ボタンにおいて右移動信号スイッチ124fを選択することで、右移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右移動信号が送信される。
【0109】
受信部139は、右移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表1右移動に示すように受信器142より右移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を前進回転(F)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、154へ後進駆動信号(B)を伝達する。
【0110】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを前進回転(F)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を後進回転(B)させる。
【0111】
すると、前方左側車輪6(FL)が図13のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0112】
また、前方右側車輪8(FR)が図13のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0113】
後方左側車輪10(BL)は、図13のように後回転(白矢印方向)し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0114】
後方右側車輪12(BR)は、図13のように前回転(白矢印方向)し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0115】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)とを合成されると前方左側車輪6(FL)の前方向推進力と後方左側車輪10(BL)後方向推進力が打ち消しあい、右方向推進力のみとなる。
【0116】
また、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると前方左側車輪8(FR)の後方向推進力と後方左側車輪12(BR)前方向推進力が打ち消しあい、右方向推進力のみとなる。
【0117】
従って、全体として、車体4は右移動することとなる。
【0118】
以上、本願のような制御を行うことで、前進、後進、右回転、左回転、左移動、右移動が、従来のブラケットによって生じる品質のばらつきや工数の長期化を防ぎコストの増大を防ぐことのできる全方向性車両玩具並びにその車輪を提供することができる。
【実施例2】
【0119】
次に、例えば、信号スイッチ124c〜124fに右回転、左回転、左移動、右移動に代わり、右前移動、左前移動、右後移動、左後移動に置き換え、制御IC144の制御プログラムを変更することで以下のような動作を行わせることも可能となる。
【0120】
【表2】
【0121】
(右前移動)
送信器120において、右側の操作ボタンにおいて右前移動信号スイッチ124cを選択することで、右前移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右前移動信号が送信される。
【0122】
受信部139は、右前移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2右前移動に示すように受信器142より右前移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を前進回転(F)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て停止(STOP)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ前進駆動信号(F)を伝達し、モータ駆動アンプ150、154へ停止信号(STOP)を伝達する。
【0123】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを前進回転(F)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を停止(STOP)させる。
【0124】
すると、前方左側車輪6(FL)が前回転し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0125】
また、前方右側車輪8(FR)が停止する。
【0126】
後方左側車輪10(BL)は、停止する。
【0127】
後方右側車輪12(BR)は、前回転し、右斜め前方向に傾斜推進力(右傾斜矢印YFR)が発生する。
【0128】
ここで、前方左側車輪6(FL)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)と、後方右側車輪12(BR)の右斜め前方向に傾斜推進力(右傾斜矢印YFR)とが合成されると共に右斜め前方向に傾斜推進力(右傾斜矢印YFR)であるので、右斜め前方向に傾斜推進力のみとなる。
【0129】
従って、全体として、車体4は右前移動することとなる。
【0130】
(左前移動)
続いて、送信器120において、右側の操作ボタンにおいて左前移動信号スイッチ124dを選択することで、左前移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左前移動信号が送信される。
【0131】
受信部139は、左前移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2左前移動に示すように受信器142より左前移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を停止(STOP)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て前進回転(F)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ停止信号(STOP)を伝達し、モータ駆動アンプ150、154へ前進駆動信号(F)を伝達する。
【0132】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを停止(STOP)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を前進回転(F)させる。
【0133】
すると、前方左側車輪6(FL)が停止する。
【0134】
また、前方右側車輪8(FR)が前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0135】
後方左側車輪10(BL)は、前回転(白矢印方向)し、左斜め前方向に傾斜推進力(左傾斜矢印YFL)が発生する。
【0136】
後方右側車輪12(BR)は、停止する。
【0137】
ここで、前方右側車輪8(FR)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)と、後方左側車輪10(BL)の左斜め前方向に傾斜推進力(左傾斜矢印YFL)とを合成されると、左前方向推進力のみとなる。
【0138】
従って、全体として、車体4は左前移動することとなる。
【0139】
(右後移動)
続いて、送信器120において、右後側の操作ボタンにおいて右後移動信号スイッチ124eを選択することで、右後移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から右後移動信号が送信される。
【0140】
受信部139は、右後移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2右後移動に示すように受信器142より右後移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を停止(STOP)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て後進回転(B)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ停止信号(STOP)を伝達し、モータ駆動アンプ150、154へ後進駆動信号(B)を伝達する。
【0141】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを停止(STOP)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を後進回転(B)させる。
【0142】
すると、前方左側車輪6(FL)が停止する。
【0143】
また、前方右側車輪8(FR)が後回転し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0144】
後方左側車輪10(BL)は、後回転し、右斜め後方向に傾斜推進力(右傾斜矢印YBR)が発生する。
【0145】
後方右側車輪12(BR)は、停止する。
【0146】
ここで、前方右側車輪8(FR)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)と、後方左側車輪10(BL)の右斜め後方向に傾斜推進力(右傾斜矢印YBR)とを合成されると、右後方向推進力のみとなる。
【0147】
従って、全体として、車体4は右後移動することとなる。
【0148】
(左後移動)
送信器120において、左側の操作ボタンにおいて左後移動信号スイッチ124fを選択することで、左後移動信号が制御IC126に伝達され、RF変調回路128とフィルタ部130を経由してアンテナ132から左後移動信号が送信される。
【0149】
受信部139は、左後移動信号をアンテナ140で受信し、受信器142で検波する。制御IC144は、表2左後移動に示すように受信器142より左後移動信号を受信すると、前方左側車輪6(FL)と後方右側車輪12(BR)を後進回転(B)させと、前方右側車輪8(FR)と後方左側車輪10(BL)とを全て停止(STOP)させる信号を生成する。すなわち、モータ駆動アンプ146、158へ後進駆動信号(B)を伝達し、モータ駆動アンプ150、154へ停止信号(STOP)を伝達する。
【0150】
モータ駆動アンプ146、158は、前方左モータユニット148と後方左モータユニット160とを後進回転(B)させ、モータ駆動アンプ150、154は、それぞれ、前方右モータユニット152と後方左モータユニット156を停止(STOP)させる。
【0151】
すると、前方左側車輪6(FL)が後回転し、左斜め後方向に傾斜推進力(右傾斜矢印YBL)が発生する。
【0152】
また、前方右側車輪8(FR)が停止する。
【0153】
後方左側車輪10(BL)は、停止する。
【0154】
後方右側車輪12(BR)は、後回転し、左斜め後方向に傾斜推進力(右傾斜矢印YBL)が発生する。
【0155】
ここで、前方左側車輪6(FL)の左斜め後方向に傾斜推進力(右傾斜矢印YBL)と、後方右側車輪12(BR)の左斜め後方向に傾斜推進力(右傾斜矢印YBL)とが合成されると共に左斜め後方向に傾斜推進力(右傾斜矢印YBL)であるので、右斜め前方向に傾斜推進力のみとなる。
【0156】
従って、全体として、車体4は左後移動することとなる。
【図面の簡単な説明】
【0157】
【図1】本発明に係る全方向性車両玩具の一実施例の概観図である。
【図2】本発明に係る全方向性車両玩具の一実施例の分解図である。
【図3】本発明に係る全方向性車両玩具の一実施例のタイヤの概観図である。
【図4】本発明に係る全方向性車両玩具の一実施例のタイヤの断面図である。
【図5】本発明に係る全方向性車両玩具の一実施例の送信器である。
【図6】本発明に係る全方向性車両玩具の一実施例の受信部である。
【図7】本発明に係る全方向性車両玩具の一実施例の送信器である。
【図8】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図9】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図10】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図11】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図12】本発明に係る全方向性車両玩具の一実施例の動作図である。
【図13】本発明に係る全方向性車両玩具の一実施例の動作図である。
【符号の説明】
【0158】
2 全方向性車両玩具
4 車体
6 前方左側車輪
8 前方右側車輪
10 後方左側車輪
12 後方右側車輪
18 ケース
20 カバー
22、24、26、28 モータ
30、31 側板
32、34 開口部
36、48 ピニオンギア
38、40、42、44 ギア
46、47、58、59 回転軸
50、52、54、56 ギア
58 回転軸
60 フランジ
62 ホイールカバー
64、66、68、70、72、74 ロール
62 ホイールカバー
63 中央ホイール部
75 中心軸
76 折り曲げ部
78 折り曲げ部
77 平板部
78、92、100 折り曲げ部
80、118 キャップ
81 開口部
82 平板部
84 折り曲げ部
86 平板部
88 平板部
90 平板部
92 折り曲げ部
96 折り曲げ部
98 折り曲げ部
102 折り曲げ部
104 折り曲げ部
105、106、108 突設部
108a、108b、108c、108d トレッド
116 トレッド
120 送信器
122 電源
124 制御スイッチ
124a〜124f 信号スイッチ
124a 前進信号スイッチ
124b 後進信号スイッチ
124c 右回転信号スイッチ
124d 左前移動信号スイッチ
124d 左回転信号スイッチ
124e 左移動信号スイッチ
124e 右後移動信号スイッチ
124f 右移動信号スイッチ
124f 左後移動信号スイッチ
126 制御IC
128 RF変調回路
130 フィルタ部
132 アンテナ
134 水晶発振回路
136 RF発振回路
139 受信部
140 アンテナ
142 受信器
144 制御IC
146、150、154、158 モータ駆動アンプ
148 前方左モータユニット
152 前方右モータユニット
156 後方左モータユニット
160 後方左モータユニット
162 電源
【特許請求の範囲】
【請求項1】
回転駆動部を搭載する車体と、前記回転駆動部と減速部とを介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具において、
前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように設定される前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する全方向性車両玩具。
【請求項2】
前記中心部材は、前記車体に対して前方両端に前方左側中心部材と前方右側中心部材とが設けられ、後方両端に後方左側中心部材と後方右側中心部材とが設けられて、前方左側中心部材と前方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して前方の支持部が車体側に配置して後方の支持部が車体から離間する側となるように配置し、後方左側中心部材と後方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して後方の支持部が車体側に配置して前方の支持部が車体から離間する側となるように配置されることを特徴とする請求項1記載の全方向性車両玩具。
【請求項3】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする請求項1記載の全方向性車両玩具。
【請求項4】
前記回転駆動部は、車輪毎に設けられることを特徴とする請求項1記載の全方向性車両玩具。
【請求項5】
前記回転駆動部は、無線操縦装置により駆動されることを特徴とする請求項1記載の全方向性車両玩具。
【請求項6】
回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具の車輪において、
前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する全方向性車両玩具の車輪。
【請求項7】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする請求項6記載の全方向性車両玩具の車輪。
【請求項1】
回転駆動部を搭載する車体と、前記回転駆動部と減速部とを介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具において、
前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように設定される前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する全方向性車両玩具。
【請求項2】
前記中心部材は、前記車体に対して前方両端に前方左側中心部材と前方右側中心部材とが設けられ、後方両端に後方左側中心部材と後方右側中心部材とが設けられて、前方左側中心部材と前方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して前方の支持部が車体側に配置して後方の支持部が車体から離間する側となるように配置し、後方左側中心部材と後方右側中心部材それぞれロールの回転軸は設置面において進行方向に対して後方の支持部が車体側に配置して前方の支持部が車体から離間する側となるように配置されることを特徴とする請求項1記載の全方向性車両玩具。
【請求項3】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする請求項1記載の全方向性車両玩具。
【請求項4】
前記回転駆動部は、車輪毎に設けられることを特徴とする請求項1記載の全方向性車両玩具。
【請求項5】
前記回転駆動部は、無線操縦装置により駆動されることを特徴とする請求項1記載の全方向性車両玩具。
【請求項6】
回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロータが回転自在に挿入される全方向性車両玩具の車輪において、
前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する全方向性車両玩具の車輪。
【請求項7】
前記ロールは、長軸側を回転軸とする紡錘形状に形成され、回転軸と平行にトレッドが刻設されて、最太部に回転軸と垂直なトレッドが設けられることを特徴とする請求項6記載の全方向性車両玩具の車輪。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−82080(P2010−82080A)
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願番号】特願2008−252964(P2008−252964)
【出願日】平成20年9月30日(2008.9.30)
【出願人】(508044966)株式会社NIKKO (8)
【Fターム(参考)】
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願日】平成20年9月30日(2008.9.30)
【出願人】(508044966)株式会社NIKKO (8)
【Fターム(参考)】
[ Back to top ]