
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数台のクレーンを協調させて単一の搬送物を吊り下げて搬送するための共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法に関する。
【背景技術】
【0002】
従来、複数台のクレーンを協調させて単一の搬送物を吊り下げて、すなわち、共吊クレーンによる単一搬送物の搬送が行われている。このような共吊クレーンにおいては、それぞれのクレーンを別個の作業者が手動操作し、協調して搬送が行われるように、各作業者同士が連絡をとり合って各クレーンを操作することが行われている。
【0003】
また、このような共吊クレーンにおいては、各クレーンを同一の制御装置によって制御するようにして、協調して搬送できるような動作指令を制御装置から全てのクレーンに供給して動作させることが行われている。この場合の動作指令は、各クレーンについて同一の動作指令とするか、または、個々のクレーンがそれぞれ同じような動作をするような動作指令とし、これを各クレーンに供給することを行っている。
【0004】
さらに、特許文献1には、クレーンに対する負荷に応じて、各クレーンの速度を加減するようにした協調搬送制御方法が記載されている。
【0005】
【特許文献1】特開平9−86884号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、前述したように複数の作業者同士が連絡をとり合って複数のクレーンを操作する場合には、作業者のミス等により、搬送が失敗する虞れがある。
【0007】
また、制御装置から全てのクレーンに動作指令を供給して動作させる場合には、各クレーンの干渉条件などの点で動作指令の生成が煩雑である。すなわち、個々のクレーンが協調して搬送が行われるように動作指令を修正したり、操作者が他のクレーンの動作を見ながら調整を行う必要が生じ、操作の効率が悪い。また、この場合には、搬送物の振れ止めを考慮する必要がある。すなわち、この場合には、個々のクレーンは他のクレーンと関係なく動作するため、搬送物が揺れる虞れがあるのである。
【0008】
そして、特許文献1に記載された方法は、複数のクレーンに全く同じ速度指令を与えた場合には、負荷の偏りにより、モータの焼き付き等の破損を生ずる虞れがあるため、このような破損を防ぐための方法である。すなわち、複数のクレーンに対し、巻き上げも含めて同じ速度指令を与えて動作させるという点で、前述した方法と同じであり、搬送物の振れ止めを考慮する必要がある。また、この方法は、並進運動のみならず回転運動をも行なうクレーンを用いる場合には適用できない。
【0009】
そこで、本発明は、前記の実情に鑑みてなされたもので、その目的は、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良く、また、搬送物の揺れを抑えることができるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法を提供することにある。
【課題を解決するための手段】
【0010】
前述の課題を解決し、前記目的を達成するため、本発明に係る共吊クレーンの協調搬送制御装置は、以下の構成のいずれか一を有するものである。
【0011】
〔構成1〕
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、複数のクレーンのうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーンであり、複数のクレーンのうちリーダクレーンの他のクレーンは、制御装置による制御に従って動作するフォロワクレーンであり、制御装置は、フォロワクレーンにおける搬送物の振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定する推定器と、この推定器により推定された距離偏差をなくすようにフォロワクレーンヘの動作指令を生成する動作指令制御部とを有し、この動作指令によりフォロワクレーンを動作させてリーダクレーンの動作に追従させることを特徴とするものである。
【0012】
〔構成2〕
構成1を有する共吊クレーンの協調搬送制御装置において、推定器は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて推定を行うことを特徴とするものである。
【0013】
〔構成3〕
構成2を有する共吊クレーンの協調搬送制御装置において、推定器において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)であることを特徴とするものである。
【0014】
また、本発明に係る共吊クレーンの協調搬送制御方法は、以下の構成のいずれか一を有するものである。
【0015】
〔構成4〕
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御方法であって、複数のクレーンのうちの一を、作業者の操作、または、予め指定された指令によって動作するリーダクレーンとし、複数のクレーンのうちリーダクレーンの他のクレーンを、制御装置による制御に従って動作するフォロワクレーンとし、制御装置により、フォロワクレーンにおける搬送物の振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定し、この距離偏差をなくすようにフォロワクレーンヘの動作指令を生成し、この動作指令によりフォロワクレーンを動作させてリーダクレーンの動作に追従させることを特徴とするものである。
【0016】
〔構成5〕
構成4を有する共吊クレーンの協調搬送制御方法において、制御装置における距離偏差の推定は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて行うことを特徴とするものである。
【0017】
〔構成6〕
構成5を有する共吊クレーンの協調搬送制御方法において、制御装置における距離偏差の推定において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)であることを特徴とするものである。
【発明の効果】
【0018】
本発明においては、複数のクレーンのうちの一は、作業者の操作等によって動作するリーダクレーンであり、他のクレーンは、制御装置により制御されて動作するフォロワクレーンである。そして、制御装置は、フォロワクレーンにおいて搬送物を吊り下げているワイヤの振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定し、この距離偏差をなくすようにフォロワクレーンを動作させ、リーダクレーンの動作に追従させる。
【0019】
したがって、本発明においては、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良い。本発明において、リーダクレーンは、自動運転によっても作業者による操作によってもよい。また、各クレーン間で各々の情報のやり取りが必要ないため、装置構成を簡便とすることができる。さらに、本発明は、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる
そして、本発明においては、リーダクレーンとフォロワクレーンとの間では、引っ張り合い、または、押し合いに近い状態となるため、搬送物の振れを抑制する効果があり、別途に振れ止めを考慮する必要がない。すなわち、全てのクレーンが同じ動作指令で動作すると、各クレーンが搬送物を吊り下げるワイヤは互いに平行となり、搬送物の振れが生じるが、本発明では、フォロワクレーンはリーダクレーンからの引き押しに応じて動作を行なうため、各クレーンが搬送物を吊り下げるワイヤは、平行ではなく、ハの字、または、逆ハ字となり、搬送物の振れが生じにくい。
【0020】
すなわち、本発明は、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良く、また、搬送物の揺れを抑えることができるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法を提供することができるものである。
【発明を実施するための最良の形態】
【0021】
以下、本発明を実施するための最良の形態について図面を参照して説明する。
【0022】
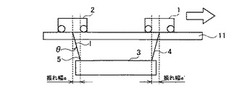
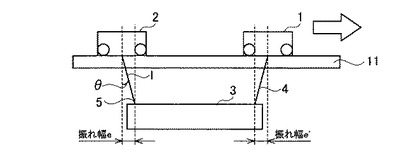
図1は、本発明に係る共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【0023】
本発明に係る共吊クレーンの協調搬送制御装置は、複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、例えば、図1に示すように、進行方向が互いに同一となされた2台の天井クレーン1,2を有して構成される。そして、本発明に係る共吊クレーンの協調搬送制御方法は、この共吊クレーンの協調搬送制御装置によって実行される方法である。なお、ここでは、説明を簡単化するため、2台の並進動作を行なう天井クレーン1,2で単一の搬送物3を吊り下げる状況について説明するが、本発明においては、クレーンは3台以上でもよく、また、搬送物を吊り下げるワイヤの振れ幅が測定できれぱ、並進動作を行なうものに限定されず、回転運動をも行なうクレーンであってもよい。
【0024】
この共吊クレーンの協調搬送制御装置において、複数のクレーン1,2のうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーン1であり、他のクレーンは、制御装置による制御に従って動作するフォロワクレーン2である。これらリーダクレーン1及びフォロワクレーン2は、それぞれがガイドレール11に沿って移動操作可能となされており、それぞれがワイヤ4,5によって同一の搬送物3を吊り下げている。
【0025】
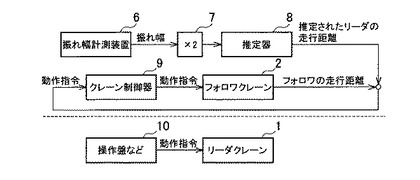
図2は、本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の構成を示すブロック図である。
【0026】
この協調搬送制御装置において、リーダクレーン1は、図2に示すように、操作盤10などからの動作指令を受けて動作する。この操作盤10は、作業者が操作するものであってもよく、また、予め指定された指令を記憶しているコンピュータ装置などであってもよい。
【0027】
そして、フォロワクレーン2には、フォロワクレーン2における搬送物3の振れ幅eを計測する振れ幅計測装置6が設けられている。この振れ幅計測装置6は、例えば、画像情報や光学センサ等の変位計などによってフォロワクレーン2に対する搬送物3の相対位置を直接測定するものであってもよく、また、図1に示すように、ワイヤ5の振れ角度θを計測し、この角度θとワイヤ5の長さlとから振れ幅eを算出するものであってもよい。ワイヤ5の振れ角度θから搬送物3の振れ幅を求める場合には、搬送物3の振れ幅eは、〔d=lsinθ〕によって求められる。
【0028】
そして、この協調搬送制御装置の制御装置においては、図2に示すように、振れ幅計測装置6によって計測された振れ幅eは、乗算器7によって2倍にされて、推定器8に送られる。この推定器8は、フォロワクレーン2における搬送物3の振れ幅eに基づいて、フォロワクレーン2のリーダクレーン1に対する距離偏差を推定するものである。
【0029】
振れ幅eを2倍にして推定器8に送っているのは、リーダクレーン1とフォロワクレーン2とは押し合いまたは引き合い状態となっており、フォロワクレーン2における振れ幅eとリーダクレーン1における振れ幅e´とは、符号が逆で等しい絶対値を有する値となっていると考えられるためである。すなわち、フォロワクレーン2のリーダクレーン1に対する距離は、初期状態における距離(振れ幅eが0であるときの距離)に、フォロワクレーン2における振れ幅e及びリーダクレーン1における振れ幅e´を加えた値、つまり、フォロワクレーン2における振れ幅eの2倍を加えた値となっているものと推定できるためである。ここでは、フォロワクレーン2における振れ幅eの2倍が距離偏差である。
【0030】
例えば、図1に示す状態では、リーダクレーン1は、図中右側に向かって移動しており、搬送物3を引っ張っている。このとき、フォロワクレーン2は、搬送物3を通じてリーダクレーン1に引っ張られた状態となっており、図中右側に振れ幅eが生じている。リーダクレーン1及びフォロワクレーン2におけるワイヤ4,5の長さが等しい場合には、リーダクレーン1及びフォロワクレーン2における振れ幅e,e´は等しい値となる。したがって、フォロワクレーン2においては、振れ幅eに基づいて、リーダクレーン1における振れ幅e´がわかることになる。このことより、フォロワクレーン2のリーダクレーン1に対する距離偏差は、振れ幅eの2倍であることがわかる。
【0031】
ここで、フォロワクレーン2は、リーダクレーン1の走行軌道との差がゼロとなるように走行すれば、リーダクレーン1と同じ距離を同じ軌跡で走行することとなるので、リーダクレーン1と共吊している搬送物3を協調して搬送できることとなる。そのため、制御装置においては、推定器8により推定される距離偏差が0となるように、動作指令制御部9においてフォロワクレーン2ヘの動作指令を生成し、この動作指令をフォロワクレーン2に送ってフォロワクレーン2を制御する。このような動作指令により制御されるフォロワクレーン2は、リーダクレーン1の動作に追従して動作することとなる。
【0032】
制御装置の動作としては、振れ幅eをフィードバックして0とするようにフォロワクレーン2を制御してもよいが、これでは、リーダクレーン1が停止しているときはよいが、リーダクレーン1がある速度で移動しているときには、速度にばらつきが出てしまう。つまり、フォロワクレーン2が進行、停止を繰り返すことになってしまう。そのため、制御装置の動作としては、リーダクレーン1の移動速度も考慮して、フォロワクレーン2から見たリーダクレーン1の位置を推定することが、フォロワクレーン2の滑らかな移動のために不可欠である。
【0033】
そのため、推定器8においては、以下に示す閉ループ伝達関数が安定となる、つまり実部が負の極を持つような伝達関数G(s)に基づく推定を行うことが望ましい。
G(s)/(1+G(s))(∵sは、ラプラス変換子である。)
【0034】
このような伝達関数G(s)としては、例えば、以下のものが考えられる。
G(s)=a/s ・・・・(実施例1)
G(s)=(as+b)/s2 ・・・・(実施例2)
G(s)=(as2+bs+c)/s3 ・・・・(実施例3)
(∵a,b,cは、推定の速さ、追従度を調整する正のパラメータである。)
【0035】
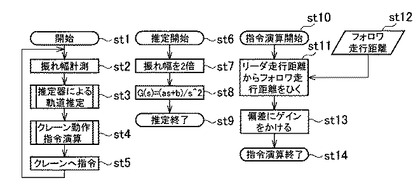
図3は、本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の動作を示すフローチャートである。
【0036】
すなわち、制御装置においては、図3に示すように、ステップst1で動作を開始すると、ステップst2に進み、フォロワクレーン2における振れ幅eの計測を行う。次に、ステップst3に進み、推定器8によりリーダクレーン1の位置を推定する。
【0037】
リーダクレーン1の位置の推定は、ステップst6において開始し、ステップst7に進み、フォロワクレーン2における振れ幅eを2倍し、ステップst8に進む。ステップst8では、前述の伝達関数〔G(s)=a/s〕、〔G(s)=(as+b)/s2〕、または、〔G(s)=(as2+bs+c)/s3〕のいずれかを用いてリーダクレーン1の位置を推定し、ステップst9で推定を終了する。
【0038】
なお、伝達関数G(s)として〔G(s)=a/s〕を用いる場合(実施例1)においては、位置のみに対応して推定が行われるため、反応が鈍くなる傾向がある。また、伝達関数G(s)として〔G(s)=(as2+bs+c)/s3〕を用いる場合(実施例3)においては、逆に加速度まで対応して推定が行われるため、反応が敏感になり過ぎる傾向がある。そのため、伝達関数G(s)としては、〔G(s)=(as+b)/s2〕を用いること(実施例2)が最も好ましい。
【0039】
リーダクレーン1の位置の推定が完了すると、ステップst4に進み、動作指令制御部9においてフォロワクレーン2ヘの動作指令を生成する。
【0040】
フォロワクレーン2ヘの動作指令の生成は、ステップst10において開始し、ステップst11に進み、リーダクレーン1の移動(走行)距離からフォロワクレーン2の移動(走行)距離を差し引いて、距離偏差を求める。フォロワクレーン2の移動(走行)距離は、ステップst12において、別途求められる。次のステップst13においては、ステップst11で求めた距離偏差にゲインを掛けて、フォロワクレーン2ヘの動作指令を生成し、ステップst14に進んで動作指令の生成を終了する。
【0041】
フォロワクレーン2への動作指令の生成が終了すると、ステップst5に進み、フォロワクレーン2に動作指令を送り、ステップst2に戻る。
【0042】
なお、この実施の形態においては、リーダクレーン1及びフォロワクレーン2においてワイヤ4,5の長さは等しいものとしているが、これらワイヤ4,5の長さが異なる場合であっても、推定器8のロバスト性により協調動作を実現することができる。あるいは、ワイヤ4,5の長さが異なる場合でも、リーダクレーン1及びフォロワクレーン2においてワイヤ4,5の振れ角は等しくなるため、推定器8におけるパラメータa,bを適宜選定すれば、振れ幅e,e´に代えて振れ角θを用いて演算することにより、ほぼ同等の結果を得ることができる。さらに、フォロワクレーン2を複数台用いる場合でも同様である。
【0043】
また、この協調搬送制御装置において、フォロワクレーン2に与える動作指令としては、距離偏差に応じてフォロワクレーン2を移動させる「位置制御」や、距離偏差から速度指令を演算してフォロワクレーン2を移動させる「速度制御」、または、距離偏差からトルク指令を演算してフォロワクレーン2を移動させる「トルク制御」のいずれもが考えられる。
【0044】
ここで、一実施例として、以下の動作を考える。ここでは、フォロワクレーン2に与える動作指令を「速度制御」とする。すなわち、動作指令制御部9は、フォロワクレーン2が移動すべき速度情報を生成する。リーダクレーン1及びフォロワクレーン2において、動作すベき速度が与えられる場合は、その速度はそのまま速度指令となる。また、リーダクレーン1及びフォロワクレーン2において、動作すべき距離が与えられる場合は、距離に正の値の制御ゲインをかけた値が速度指令となる。また、ここでは、ワイヤ4,5は、撓みを生じない円筒の剛体とみなしている。
【0045】
制御装置においては、制御演算として、まず、以下の推定演算を行う。
【0046】
この推定演算においては、フォロワクレーン2における振れ幅をeとしたとき、以下の演算を行う。
xl=(as+b)/s2×(2e)
【0047】
ここで、xlは、推定されたリーダクレーン1の走行距離、a,bは制御ゲイン、sはラプラス変換子である。この式の意味は、(2e)を1回積分してaをかけた値と2回積分してbをかけた値とを足し合わせた値を出力するという意味である。これをコンビュータ上で扱う離散化された式として表すと、例えば、以下の式となる。
w1〔k+1〕=w1〔k〕+(2e)×Δt
w2〔k+1〕=w2〔k〕+w1〔k〕×Δt
xl〔k+1〕=a×w1〔k+1〕+b×w2〔k+1〕
【0048】
ここで、w1及びw2は、内部メモリにより保持された値であり、〔k〕はk回目の演算で使われる値であり、〔k+1〕はその次の演算周期で使われる値である。Δtは演算周期である。これらを演算周期Δtで繰り返し計算をすることで、前述した伝達関数の演算が行われることとなる。
【0049】
そして、制御装置においては、次に、以下の指令演算を行う。
【0050】
リーダクレーン1の推定走行距離xlとフォロワクレーン2の走行距離xfがある場合、動作指令制御部9は、速度指令vfdを求めるため、以下を演算する。
vfd=K×(xl−xf)
【0051】
ここでKは制御ゲインであり、正の値となる。リーダクレーン1とフォロワクレーン2との協調した搬送が行われているときには、推定したリーダクレーン1の位置とフォロワクレーン2の位置との位置偏差に定数をかけた値が、フォロワクレーン2の速度指令となる。フォロワクレーン2の走行距離xfは、センサ等によって直接計測するか、フォロワクレーン2の移動速度を積分して得ることができる。フォロワクレーン2の実際の速度がvfである場合には、走行距離xfは、例えば、以下のようにして求めることもできる。
xf〔k+1〕=xf〔k〕+vf×Δt
【0052】
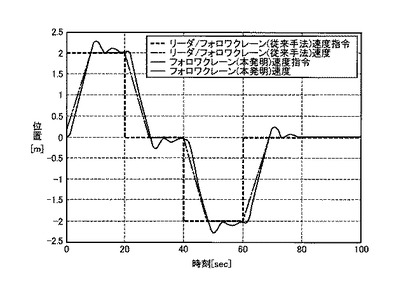
図4は、リーダクレーン及びフォロワクレーンへの速度指令と、実際のリーダクレーン及びフォロワクレーンの移動速度とを示すグラフである。
【0053】
前述のようにして本発明により協調搬送を行った場合と、リーダクレーン1及びフォロワクレーン2に同一の速度指令を与えた場合(比較例)とについて、シミュレーションすると、図4に示すように、本発明におけるリーダクレーン1及び比較例における各クレーン1,2は、ステップ状の速度指令を与えられ、追従遅れにより台形状の速度パターンで追従する。本発明におけるフォロワクレーン2は、協調搬送時において、若干のずれはあるものの、ほぼリーダクレーン1と等しい速度変化を示している。なお、フォロワクレーン2の協調搬送時の指令と実速度は一致致している。
【0054】
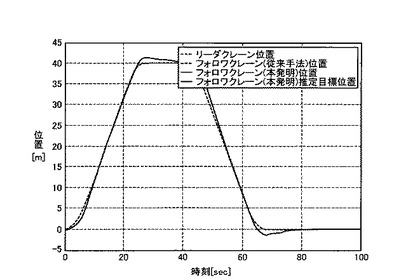
図5は、リーダクレーン及びフォロワクレーンへの位置(移動距離)を示すグラフである。
【0055】
次に、前述のようにして本発明により協調搬送を行った場合と、リーダクレーン1及びフォロワクレーン2に同一の速度指令を与えた場合(比較例)とについて、本発明におけるリーダクレーン1及び比較例における各クレーン1,2は、図5に示すように、等しい位置(移動距離)となっており、本発明におけるフォロワクレーン2は、協調搬送時において、若干のオーバーシュートが見られるが、およそリーダクレーン1と同じような軌道となっている。
【0056】
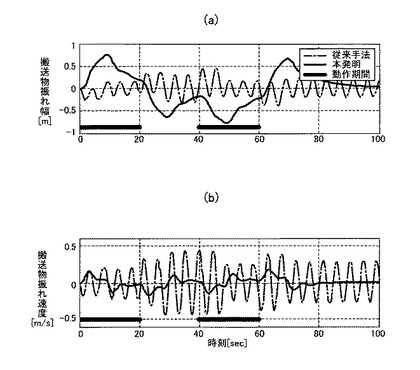
図6は、搬送物の振れ幅及び振れ速度を示すグラフである。
【0057】
図4及び図5に示したような搬送を行った場合の搬送物3の振れ幅は、図6中の(a)に示すように、比較例においては、搬送物が高い周波数で振れており、この振れが持続していることがわかる。これに対し、本発明による協調搬送においては、動作中の振れ幅の絶対値が比較例より大きい場合があるが、最終的には、振れ幅はほぼゼロとなっている。振れ速度については、図6中の(b)に示すように、比較例においては、細かい振動が動作中から停止後も残っているが、本発明においては、振れ速度は小さく、かつ、収束していることがわかる。よって、本発明においては、搬送物の振れ止め効果があることがわかる。
【0058】
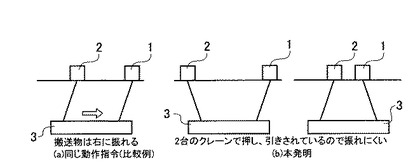
図7は、本発明及び比較例における共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【0059】
このように、本発明においては、図7中の(b)に示すように、リーダクレーン1とフォロワクレーン2との間では、引っ張り合い、または、押し合いに近い状態となるため、搬送物3の振れを抑制する効果があり、別途に振れ止めを考慮する必要がないことがわかる。図7中の(a)に示すように、全てのクレーン1,2が同じ動作指令で動作すると、各クレーン1,2が搬送物3を吊り下げるワイヤ4,5は互いに平行となり、搬送物3の振れが生じる。これに対し、本発明では、フォロワクレーン2はリーダクレーン1からの引き押しに応じて動作を行なうため、各クレーン1,2が搬送物3を吊り下げるワイヤ4,5は、平行ではなく、ハの字、または、逆ハ字となり、搬送物の振れが生じにくいと考えられる。
【図面の簡単な説明】
【0060】
【図1】本発明に係る共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【図2】本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の構成を示すブロック図である。
【図3】本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の動作を示すフローチャートである。
【図4】本発明に係る共吊クレーンの協調搬送制御装置におけるリーダクレーン及びフォロワクレーンへの速度指令と、実際のリーダクレーン及びフォロワクレーンの移動速度とを示すグラフである。
【図5】本発明に係る共吊クレーンの協調搬送制御装置におけるリーダクレーン及びフォロワクレーンへの位置(移動距離)を示すグラフである。
【図6】本発明に係る共吊クレーンの協調搬送制御装置における搬送物の振れ幅及び振れ速度を示すグラフである。
【図7】本発明及び比較例における共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【符号の説明】
【0061】
1 リーダクレーン
2 フォロワクレーン
3 搬送物
4,5 ワイヤ
6 振れ幅計測装置
7 乗算器
8 推定器
9 動作指令制御部
10 操作盤
11 ガイドレール
【技術分野】
【0001】
本発明は、複数台のクレーンを協調させて単一の搬送物を吊り下げて搬送するための共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法に関する。
【背景技術】
【0002】
従来、複数台のクレーンを協調させて単一の搬送物を吊り下げて、すなわち、共吊クレーンによる単一搬送物の搬送が行われている。このような共吊クレーンにおいては、それぞれのクレーンを別個の作業者が手動操作し、協調して搬送が行われるように、各作業者同士が連絡をとり合って各クレーンを操作することが行われている。
【0003】
また、このような共吊クレーンにおいては、各クレーンを同一の制御装置によって制御するようにして、協調して搬送できるような動作指令を制御装置から全てのクレーンに供給して動作させることが行われている。この場合の動作指令は、各クレーンについて同一の動作指令とするか、または、個々のクレーンがそれぞれ同じような動作をするような動作指令とし、これを各クレーンに供給することを行っている。
【0004】
さらに、特許文献1には、クレーンに対する負荷に応じて、各クレーンの速度を加減するようにした協調搬送制御方法が記載されている。
【0005】
【特許文献1】特開平9−86884号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、前述したように複数の作業者同士が連絡をとり合って複数のクレーンを操作する場合には、作業者のミス等により、搬送が失敗する虞れがある。
【0007】
また、制御装置から全てのクレーンに動作指令を供給して動作させる場合には、各クレーンの干渉条件などの点で動作指令の生成が煩雑である。すなわち、個々のクレーンが協調して搬送が行われるように動作指令を修正したり、操作者が他のクレーンの動作を見ながら調整を行う必要が生じ、操作の効率が悪い。また、この場合には、搬送物の振れ止めを考慮する必要がある。すなわち、この場合には、個々のクレーンは他のクレーンと関係なく動作するため、搬送物が揺れる虞れがあるのである。
【0008】
そして、特許文献1に記載された方法は、複数のクレーンに全く同じ速度指令を与えた場合には、負荷の偏りにより、モータの焼き付き等の破損を生ずる虞れがあるため、このような破損を防ぐための方法である。すなわち、複数のクレーンに対し、巻き上げも含めて同じ速度指令を与えて動作させるという点で、前述した方法と同じであり、搬送物の振れ止めを考慮する必要がある。また、この方法は、並進運動のみならず回転運動をも行なうクレーンを用いる場合には適用できない。
【0009】
そこで、本発明は、前記の実情に鑑みてなされたもので、その目的は、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良く、また、搬送物の揺れを抑えることができるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法を提供することにある。
【課題を解決するための手段】
【0010】
前述の課題を解決し、前記目的を達成するため、本発明に係る共吊クレーンの協調搬送制御装置は、以下の構成のいずれか一を有するものである。
【0011】
〔構成1〕
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、複数のクレーンのうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーンであり、複数のクレーンのうちリーダクレーンの他のクレーンは、制御装置による制御に従って動作するフォロワクレーンであり、制御装置は、フォロワクレーンにおける搬送物の振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定する推定器と、この推定器により推定された距離偏差をなくすようにフォロワクレーンヘの動作指令を生成する動作指令制御部とを有し、この動作指令によりフォロワクレーンを動作させてリーダクレーンの動作に追従させることを特徴とするものである。
【0012】
〔構成2〕
構成1を有する共吊クレーンの協調搬送制御装置において、推定器は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて推定を行うことを特徴とするものである。
【0013】
〔構成3〕
構成2を有する共吊クレーンの協調搬送制御装置において、推定器において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)であることを特徴とするものである。
【0014】
また、本発明に係る共吊クレーンの協調搬送制御方法は、以下の構成のいずれか一を有するものである。
【0015】
〔構成4〕
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御方法であって、複数のクレーンのうちの一を、作業者の操作、または、予め指定された指令によって動作するリーダクレーンとし、複数のクレーンのうちリーダクレーンの他のクレーンを、制御装置による制御に従って動作するフォロワクレーンとし、制御装置により、フォロワクレーンにおける搬送物の振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定し、この距離偏差をなくすようにフォロワクレーンヘの動作指令を生成し、この動作指令によりフォロワクレーンを動作させてリーダクレーンの動作に追従させることを特徴とするものである。
【0016】
〔構成5〕
構成4を有する共吊クレーンの協調搬送制御方法において、制御装置における距離偏差の推定は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて行うことを特徴とするものである。
【0017】
〔構成6〕
構成5を有する共吊クレーンの協調搬送制御方法において、制御装置における距離偏差の推定において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)であることを特徴とするものである。
【発明の効果】
【0018】
本発明においては、複数のクレーンのうちの一は、作業者の操作等によって動作するリーダクレーンであり、他のクレーンは、制御装置により制御されて動作するフォロワクレーンである。そして、制御装置は、フォロワクレーンにおいて搬送物を吊り下げているワイヤの振れ幅に基づいてフォロワクレーンのリーダクレーンに対する距離偏差を推定し、この距離偏差をなくすようにフォロワクレーンを動作させ、リーダクレーンの動作に追従させる。
【0019】
したがって、本発明においては、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良い。本発明において、リーダクレーンは、自動運転によっても作業者による操作によってもよい。また、各クレーン間で各々の情報のやり取りが必要ないため、装置構成を簡便とすることができる。さらに、本発明は、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる
そして、本発明においては、リーダクレーンとフォロワクレーンとの間では、引っ張り合い、または、押し合いに近い状態となるため、搬送物の振れを抑制する効果があり、別途に振れ止めを考慮する必要がない。すなわち、全てのクレーンが同じ動作指令で動作すると、各クレーンが搬送物を吊り下げるワイヤは互いに平行となり、搬送物の振れが生じるが、本発明では、フォロワクレーンはリーダクレーンからの引き押しに応じて動作を行なうため、各クレーンが搬送物を吊り下げるワイヤは、平行ではなく、ハの字、または、逆ハ字となり、搬送物の振れが生じにくい。
【0020】
すなわち、本発明は、作業者のミス等により搬送が失敗する虞れがなく、動作指令の生成が容易であって操作の効率が良く、また、搬送物の揺れを抑えることができるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できる共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法を提供することができるものである。
【発明を実施するための最良の形態】
【0021】
以下、本発明を実施するための最良の形態について図面を参照して説明する。
【0022】
図1は、本発明に係る共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【0023】
本発明に係る共吊クレーンの協調搬送制御装置は、複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、例えば、図1に示すように、進行方向が互いに同一となされた2台の天井クレーン1,2を有して構成される。そして、本発明に係る共吊クレーンの協調搬送制御方法は、この共吊クレーンの協調搬送制御装置によって実行される方法である。なお、ここでは、説明を簡単化するため、2台の並進動作を行なう天井クレーン1,2で単一の搬送物3を吊り下げる状況について説明するが、本発明においては、クレーンは3台以上でもよく、また、搬送物を吊り下げるワイヤの振れ幅が測定できれぱ、並進動作を行なうものに限定されず、回転運動をも行なうクレーンであってもよい。
【0024】
この共吊クレーンの協調搬送制御装置において、複数のクレーン1,2のうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーン1であり、他のクレーンは、制御装置による制御に従って動作するフォロワクレーン2である。これらリーダクレーン1及びフォロワクレーン2は、それぞれがガイドレール11に沿って移動操作可能となされており、それぞれがワイヤ4,5によって同一の搬送物3を吊り下げている。
【0025】
図2は、本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の構成を示すブロック図である。
【0026】
この協調搬送制御装置において、リーダクレーン1は、図2に示すように、操作盤10などからの動作指令を受けて動作する。この操作盤10は、作業者が操作するものであってもよく、また、予め指定された指令を記憶しているコンピュータ装置などであってもよい。
【0027】
そして、フォロワクレーン2には、フォロワクレーン2における搬送物3の振れ幅eを計測する振れ幅計測装置6が設けられている。この振れ幅計測装置6は、例えば、画像情報や光学センサ等の変位計などによってフォロワクレーン2に対する搬送物3の相対位置を直接測定するものであってもよく、また、図1に示すように、ワイヤ5の振れ角度θを計測し、この角度θとワイヤ5の長さlとから振れ幅eを算出するものであってもよい。ワイヤ5の振れ角度θから搬送物3の振れ幅を求める場合には、搬送物3の振れ幅eは、〔d=lsinθ〕によって求められる。
【0028】
そして、この協調搬送制御装置の制御装置においては、図2に示すように、振れ幅計測装置6によって計測された振れ幅eは、乗算器7によって2倍にされて、推定器8に送られる。この推定器8は、フォロワクレーン2における搬送物3の振れ幅eに基づいて、フォロワクレーン2のリーダクレーン1に対する距離偏差を推定するものである。
【0029】
振れ幅eを2倍にして推定器8に送っているのは、リーダクレーン1とフォロワクレーン2とは押し合いまたは引き合い状態となっており、フォロワクレーン2における振れ幅eとリーダクレーン1における振れ幅e´とは、符号が逆で等しい絶対値を有する値となっていると考えられるためである。すなわち、フォロワクレーン2のリーダクレーン1に対する距離は、初期状態における距離(振れ幅eが0であるときの距離)に、フォロワクレーン2における振れ幅e及びリーダクレーン1における振れ幅e´を加えた値、つまり、フォロワクレーン2における振れ幅eの2倍を加えた値となっているものと推定できるためである。ここでは、フォロワクレーン2における振れ幅eの2倍が距離偏差である。
【0030】
例えば、図1に示す状態では、リーダクレーン1は、図中右側に向かって移動しており、搬送物3を引っ張っている。このとき、フォロワクレーン2は、搬送物3を通じてリーダクレーン1に引っ張られた状態となっており、図中右側に振れ幅eが生じている。リーダクレーン1及びフォロワクレーン2におけるワイヤ4,5の長さが等しい場合には、リーダクレーン1及びフォロワクレーン2における振れ幅e,e´は等しい値となる。したがって、フォロワクレーン2においては、振れ幅eに基づいて、リーダクレーン1における振れ幅e´がわかることになる。このことより、フォロワクレーン2のリーダクレーン1に対する距離偏差は、振れ幅eの2倍であることがわかる。
【0031】
ここで、フォロワクレーン2は、リーダクレーン1の走行軌道との差がゼロとなるように走行すれば、リーダクレーン1と同じ距離を同じ軌跡で走行することとなるので、リーダクレーン1と共吊している搬送物3を協調して搬送できることとなる。そのため、制御装置においては、推定器8により推定される距離偏差が0となるように、動作指令制御部9においてフォロワクレーン2ヘの動作指令を生成し、この動作指令をフォロワクレーン2に送ってフォロワクレーン2を制御する。このような動作指令により制御されるフォロワクレーン2は、リーダクレーン1の動作に追従して動作することとなる。
【0032】
制御装置の動作としては、振れ幅eをフィードバックして0とするようにフォロワクレーン2を制御してもよいが、これでは、リーダクレーン1が停止しているときはよいが、リーダクレーン1がある速度で移動しているときには、速度にばらつきが出てしまう。つまり、フォロワクレーン2が進行、停止を繰り返すことになってしまう。そのため、制御装置の動作としては、リーダクレーン1の移動速度も考慮して、フォロワクレーン2から見たリーダクレーン1の位置を推定することが、フォロワクレーン2の滑らかな移動のために不可欠である。
【0033】
そのため、推定器8においては、以下に示す閉ループ伝達関数が安定となる、つまり実部が負の極を持つような伝達関数G(s)に基づく推定を行うことが望ましい。
G(s)/(1+G(s))(∵sは、ラプラス変換子である。)
【0034】
このような伝達関数G(s)としては、例えば、以下のものが考えられる。
G(s)=a/s ・・・・(実施例1)
G(s)=(as+b)/s2 ・・・・(実施例2)
G(s)=(as2+bs+c)/s3 ・・・・(実施例3)
(∵a,b,cは、推定の速さ、追従度を調整する正のパラメータである。)
【0035】
図3は、本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の動作を示すフローチャートである。
【0036】
すなわち、制御装置においては、図3に示すように、ステップst1で動作を開始すると、ステップst2に進み、フォロワクレーン2における振れ幅eの計測を行う。次に、ステップst3に進み、推定器8によりリーダクレーン1の位置を推定する。
【0037】
リーダクレーン1の位置の推定は、ステップst6において開始し、ステップst7に進み、フォロワクレーン2における振れ幅eを2倍し、ステップst8に進む。ステップst8では、前述の伝達関数〔G(s)=a/s〕、〔G(s)=(as+b)/s2〕、または、〔G(s)=(as2+bs+c)/s3〕のいずれかを用いてリーダクレーン1の位置を推定し、ステップst9で推定を終了する。
【0038】
なお、伝達関数G(s)として〔G(s)=a/s〕を用いる場合(実施例1)においては、位置のみに対応して推定が行われるため、反応が鈍くなる傾向がある。また、伝達関数G(s)として〔G(s)=(as2+bs+c)/s3〕を用いる場合(実施例3)においては、逆に加速度まで対応して推定が行われるため、反応が敏感になり過ぎる傾向がある。そのため、伝達関数G(s)としては、〔G(s)=(as+b)/s2〕を用いること(実施例2)が最も好ましい。
【0039】
リーダクレーン1の位置の推定が完了すると、ステップst4に進み、動作指令制御部9においてフォロワクレーン2ヘの動作指令を生成する。
【0040】
フォロワクレーン2ヘの動作指令の生成は、ステップst10において開始し、ステップst11に進み、リーダクレーン1の移動(走行)距離からフォロワクレーン2の移動(走行)距離を差し引いて、距離偏差を求める。フォロワクレーン2の移動(走行)距離は、ステップst12において、別途求められる。次のステップst13においては、ステップst11で求めた距離偏差にゲインを掛けて、フォロワクレーン2ヘの動作指令を生成し、ステップst14に進んで動作指令の生成を終了する。
【0041】
フォロワクレーン2への動作指令の生成が終了すると、ステップst5に進み、フォロワクレーン2に動作指令を送り、ステップst2に戻る。
【0042】
なお、この実施の形態においては、リーダクレーン1及びフォロワクレーン2においてワイヤ4,5の長さは等しいものとしているが、これらワイヤ4,5の長さが異なる場合であっても、推定器8のロバスト性により協調動作を実現することができる。あるいは、ワイヤ4,5の長さが異なる場合でも、リーダクレーン1及びフォロワクレーン2においてワイヤ4,5の振れ角は等しくなるため、推定器8におけるパラメータa,bを適宜選定すれば、振れ幅e,e´に代えて振れ角θを用いて演算することにより、ほぼ同等の結果を得ることができる。さらに、フォロワクレーン2を複数台用いる場合でも同様である。
【0043】
また、この協調搬送制御装置において、フォロワクレーン2に与える動作指令としては、距離偏差に応じてフォロワクレーン2を移動させる「位置制御」や、距離偏差から速度指令を演算してフォロワクレーン2を移動させる「速度制御」、または、距離偏差からトルク指令を演算してフォロワクレーン2を移動させる「トルク制御」のいずれもが考えられる。
【0044】
ここで、一実施例として、以下の動作を考える。ここでは、フォロワクレーン2に与える動作指令を「速度制御」とする。すなわち、動作指令制御部9は、フォロワクレーン2が移動すべき速度情報を生成する。リーダクレーン1及びフォロワクレーン2において、動作すベき速度が与えられる場合は、その速度はそのまま速度指令となる。また、リーダクレーン1及びフォロワクレーン2において、動作すべき距離が与えられる場合は、距離に正の値の制御ゲインをかけた値が速度指令となる。また、ここでは、ワイヤ4,5は、撓みを生じない円筒の剛体とみなしている。
【0045】
制御装置においては、制御演算として、まず、以下の推定演算を行う。
【0046】
この推定演算においては、フォロワクレーン2における振れ幅をeとしたとき、以下の演算を行う。
xl=(as+b)/s2×(2e)
【0047】
ここで、xlは、推定されたリーダクレーン1の走行距離、a,bは制御ゲイン、sはラプラス変換子である。この式の意味は、(2e)を1回積分してaをかけた値と2回積分してbをかけた値とを足し合わせた値を出力するという意味である。これをコンビュータ上で扱う離散化された式として表すと、例えば、以下の式となる。
w1〔k+1〕=w1〔k〕+(2e)×Δt
w2〔k+1〕=w2〔k〕+w1〔k〕×Δt
xl〔k+1〕=a×w1〔k+1〕+b×w2〔k+1〕
【0048】
ここで、w1及びw2は、内部メモリにより保持された値であり、〔k〕はk回目の演算で使われる値であり、〔k+1〕はその次の演算周期で使われる値である。Δtは演算周期である。これらを演算周期Δtで繰り返し計算をすることで、前述した伝達関数の演算が行われることとなる。
【0049】
そして、制御装置においては、次に、以下の指令演算を行う。
【0050】
リーダクレーン1の推定走行距離xlとフォロワクレーン2の走行距離xfがある場合、動作指令制御部9は、速度指令vfdを求めるため、以下を演算する。
vfd=K×(xl−xf)
【0051】
ここでKは制御ゲインであり、正の値となる。リーダクレーン1とフォロワクレーン2との協調した搬送が行われているときには、推定したリーダクレーン1の位置とフォロワクレーン2の位置との位置偏差に定数をかけた値が、フォロワクレーン2の速度指令となる。フォロワクレーン2の走行距離xfは、センサ等によって直接計測するか、フォロワクレーン2の移動速度を積分して得ることができる。フォロワクレーン2の実際の速度がvfである場合には、走行距離xfは、例えば、以下のようにして求めることもできる。
xf〔k+1〕=xf〔k〕+vf×Δt
【0052】
図4は、リーダクレーン及びフォロワクレーンへの速度指令と、実際のリーダクレーン及びフォロワクレーンの移動速度とを示すグラフである。
【0053】
前述のようにして本発明により協調搬送を行った場合と、リーダクレーン1及びフォロワクレーン2に同一の速度指令を与えた場合(比較例)とについて、シミュレーションすると、図4に示すように、本発明におけるリーダクレーン1及び比較例における各クレーン1,2は、ステップ状の速度指令を与えられ、追従遅れにより台形状の速度パターンで追従する。本発明におけるフォロワクレーン2は、協調搬送時において、若干のずれはあるものの、ほぼリーダクレーン1と等しい速度変化を示している。なお、フォロワクレーン2の協調搬送時の指令と実速度は一致致している。
【0054】
図5は、リーダクレーン及びフォロワクレーンへの位置(移動距離)を示すグラフである。
【0055】
次に、前述のようにして本発明により協調搬送を行った場合と、リーダクレーン1及びフォロワクレーン2に同一の速度指令を与えた場合(比較例)とについて、本発明におけるリーダクレーン1及び比較例における各クレーン1,2は、図5に示すように、等しい位置(移動距離)となっており、本発明におけるフォロワクレーン2は、協調搬送時において、若干のオーバーシュートが見られるが、およそリーダクレーン1と同じような軌道となっている。
【0056】
図6は、搬送物の振れ幅及び振れ速度を示すグラフである。
【0057】
図4及び図5に示したような搬送を行った場合の搬送物3の振れ幅は、図6中の(a)に示すように、比較例においては、搬送物が高い周波数で振れており、この振れが持続していることがわかる。これに対し、本発明による協調搬送においては、動作中の振れ幅の絶対値が比較例より大きい場合があるが、最終的には、振れ幅はほぼゼロとなっている。振れ速度については、図6中の(b)に示すように、比較例においては、細かい振動が動作中から停止後も残っているが、本発明においては、振れ速度は小さく、かつ、収束していることがわかる。よって、本発明においては、搬送物の振れ止め効果があることがわかる。
【0058】
図7は、本発明及び比較例における共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【0059】
このように、本発明においては、図7中の(b)に示すように、リーダクレーン1とフォロワクレーン2との間では、引っ張り合い、または、押し合いに近い状態となるため、搬送物3の振れを抑制する効果があり、別途に振れ止めを考慮する必要がないことがわかる。図7中の(a)に示すように、全てのクレーン1,2が同じ動作指令で動作すると、各クレーン1,2が搬送物3を吊り下げるワイヤ4,5は互いに平行となり、搬送物3の振れが生じる。これに対し、本発明では、フォロワクレーン2はリーダクレーン1からの引き押しに応じて動作を行なうため、各クレーン1,2が搬送物3を吊り下げるワイヤ4,5は、平行ではなく、ハの字、または、逆ハ字となり、搬送物の振れが生じにくいと考えられる。
【図面の簡単な説明】
【0060】
【図1】本発明に係る共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【図2】本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の構成を示すブロック図である。
【図3】本発明に係る共吊クレーンの協調搬送制御装置を構成する制御装置の動作を示すフローチャートである。
【図4】本発明に係る共吊クレーンの協調搬送制御装置におけるリーダクレーン及びフォロワクレーンへの速度指令と、実際のリーダクレーン及びフォロワクレーンの移動速度とを示すグラフである。
【図5】本発明に係る共吊クレーンの協調搬送制御装置におけるリーダクレーン及びフォロワクレーンへの位置(移動距離)を示すグラフである。
【図6】本発明に係る共吊クレーンの協調搬送制御装置における搬送物の振れ幅及び振れ速度を示すグラフである。
【図7】本発明及び比較例における共吊クレーンの協調搬送制御装置を構成するクレーンの構成を示す側面図である。
【符号の説明】
【0061】
1 リーダクレーン
2 フォロワクレーン
3 搬送物
4,5 ワイヤ
6 振れ幅計測装置
7 乗算器
8 推定器
9 動作指令制御部
10 操作盤
11 ガイドレール
【特許請求の範囲】
【請求項1】
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、
前記複数のクレーンのうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーンであり、
前記複数のクレーンのうち前記リーダクレーンの他のクレーンは、制御装置による制御に従って動作するフォロワクレーンであり、
前記制御装置は、前記フォロワクレーンにおける前記搬送物の振れ幅に基づいて当該フォロワクレーンの前記リーダクレーンに対する距離偏差を推定する推定器と、この推定器により推定された距離偏差をなくすように前記フォロワクレーンヘの動作指令を生成する動作指令制御部とを有し、この動作指令により前記フォロワクレーンを動作させて前記リーダクレーンの動作に追従させる
ことを特徴とする共吊クレーンの協調搬送制御装置。
【請求項2】
前記推定器は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて推定を行う
ことを特徴とする請求項1記載の共吊クレーンの協調搬送制御装置。
【請求項3】
前記推定器において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)である
ことを特徴とする請求項2記載の共吊クレーンの協調搬送制御装置。
【請求項4】
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御方法であって、
前記複数のクレーンのうちの一を、作業者の操作、または、予め指定された指令によって動作するリーダクレーンとし、
前記複数のクレーンのうち前記リーダクレーンの他のクレーンを、制御装置による制御に従って動作するフォロワクレーンとし、
前記制御装置により、前記フォロワクレーンにおける前記搬送物の振れ幅に基づいて当該フォロワクレーンの前記リーダクレーンに対する距離偏差を推定し、この距離偏差をなくすように前記フォロワクレーンヘの動作指令を生成し、この動作指令により前記フォロワクレーンを動作させて前記リーダクレーンの動作に追従させる
ことを特徴とする共吊クレーンの協調搬送制御方法。
【請求項5】
前記制御装置における距離偏差の推定は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて行う
ことを特徴とする請求項4記載の共吊クレーンの協調搬送制御方法。
【請求項6】
前記制御装置における距離偏差の推定において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)である
ことを特徴とする請求項5記載の共吊クレーンの協調搬送制御方法。
【請求項1】
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置であって、
前記複数のクレーンのうちの一は、作業者の操作、または、予め指定された指令によって動作するリーダクレーンであり、
前記複数のクレーンのうち前記リーダクレーンの他のクレーンは、制御装置による制御に従って動作するフォロワクレーンであり、
前記制御装置は、前記フォロワクレーンにおける前記搬送物の振れ幅に基づいて当該フォロワクレーンの前記リーダクレーンに対する距離偏差を推定する推定器と、この推定器により推定された距離偏差をなくすように前記フォロワクレーンヘの動作指令を生成する動作指令制御部とを有し、この動作指令により前記フォロワクレーンを動作させて前記リーダクレーンの動作に追従させる
ことを特徴とする共吊クレーンの協調搬送制御装置。
【請求項2】
前記推定器は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて推定を行う
ことを特徴とする請求項1記載の共吊クレーンの協調搬送制御装置。
【請求項3】
前記推定器において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)である
ことを特徴とする請求項2記載の共吊クレーンの協調搬送制御装置。
【請求項4】
複数のクレーンの動作を制御してこれら複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御方法であって、
前記複数のクレーンのうちの一を、作業者の操作、または、予め指定された指令によって動作するリーダクレーンとし、
前記複数のクレーンのうち前記リーダクレーンの他のクレーンを、制御装置による制御に従って動作するフォロワクレーンとし、
前記制御装置により、前記フォロワクレーンにおける前記搬送物の振れ幅に基づいて当該フォロワクレーンの前記リーダクレーンに対する距離偏差を推定し、この距離偏差をなくすように前記フォロワクレーンヘの動作指令を生成し、この動作指令により前記フォロワクレーンを動作させて前記リーダクレーンの動作に追従させる
ことを特徴とする共吊クレーンの協調搬送制御方法。
【請求項5】
前記制御装置における距離偏差の推定は、閉ループ伝達関数〔G(s)/(1+G(s))〕が安定となる伝達関数G(s)を用いて行う
ことを特徴とする請求項4記載の共吊クレーンの協調搬送制御方法。
【請求項6】
前記制御装置における距離偏差の推定において用いる伝達関数G(s)は、〔G(s)=(as+b)/s2〕 (ただし、sは、ラプラス変換子、a,bは、推定の速さ及び追従度を調整する正のパラメータ)である
ことを特徴とする請求項5記載の共吊クレーンの協調搬送制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−290786(P2007−290786A)
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−117572(P2006−117572)
【出願日】平成18年4月21日(2006.4.21)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成18年4月21日(2006.4.21)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]