
共用車両管理装置
【課題】共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像Fに基づいて認識された所定の駐車領域界隈の基準構成物が記憶手段102に記憶されており、共用車両1が駐車されたときに、単眼カメラ3の撮影画像に基づいて認識された共用車両1が駐車された駐車領域界隈の構成物と、記憶手段102に記憶された基準構成物とが照合手段104により照合され、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域に返却されているか否かが判定手段105により判定されて、所定の駐車領域に駐車される共用車両の貸出状況が管理されるため、従来のようにGPS5などにより取得される車両位置に関する情報を用いなくとも、共用車両1が所定の駐車領域に返却されたか否かを確実に判定することができる。
【解決手段】単眼カメラ3の撮影画像Fに基づいて認識された所定の駐車領域界隈の基準構成物が記憶手段102に記憶されており、共用車両1が駐車されたときに、単眼カメラ3の撮影画像に基づいて認識された共用車両1が駐車された駐車領域界隈の構成物と、記憶手段102に記憶された基準構成物とが照合手段104により照合され、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域に返却されているか否かが判定手段105により判定されて、所定の駐車領域に駐車される共用車両の貸出状況が管理されるため、従来のようにGPS5などにより取得される車両位置に関する情報を用いなくとも、共用車両1が所定の駐車領域に返却されたか否かを確実に判定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する技術に関する。
【背景技術】
【0002】
従来、GPSにより取得される共用車両の位置に基づいて、共用車両が駐車場の所定の駐車領域に返却されたか否かを管理する技術が知られている(例えば、特許文献1参照)。すなわち、GPSにより取得された自車位置に関する情報が共用車両から駐車場に設けられた管制装置に送信され、共用車両の自車位置に関する情報に基づいて、共用車両が駐車場に設定された入庫エリア内にあるか否かが管制装置により判定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−293794号公報(段落[0046]〜[0060]、図9〜13など)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、GPS衛星の管理状況や太陽の活動状況など、種々の状況に応じてGPSの位置精度が変動することが知られており、約50m程度の位置誤差は常に生じるおそれがある。このようにGPSの位置精度が悪くなると、GPSにより取得された車両位置に基づいて共用車両が返却されたか否かが判定された場合に、共用車両が所定の駐車領域に返却されているにも関わらず、共用車両が返却されていないと判定されるおそれがある。また、駐車場がビル内などにある場合には、GPS情報を受信することができないため、共用車両の位置を特定できないという問題があった。
【0005】
本発明は、上記課題に鑑みてなされたものであり、共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した目的を達成するために、本発明の共用車両管理装置は、駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する共用車両管理装置において、前記共用車両に搭載され前記共用車両の周辺環境を認識する認識手段と、前記認識手段により認識された周辺環境としての前記所定の駐車領域界隈の基準構成物を記憶する記憶手段と、前記認識手段により認識された前記共用車両が駐車された駐車領域界隈の構成物と、前記記憶手段に記憶された前記基準構成物とを照合する照合手段と、前記照合手段による照合結果に基づいて前記共用車両が前記所定の駐車領域に返却されているか否かを判定する判定手段とを備えたことを特徴としている。
【発明の効果】
【0007】
請求項1に記載の発明によれば、共用車両に搭載され共用車両の周辺環境を認識する認識手段より認識された周辺環境としての駐車場の所定の駐車領域界隈の基準構成物が記憶手段に記憶されており、共用車両が駐車されたときに、認識手段により認識された共用車両が駐車された駐車領域界隈の構成物と、記憶手段に記憶された基準構成物とが照合手段により照合され、照合手段による照合結果に基づいて共用車両が所定の駐車領域に返却されているか否かが判定手段により判定されて、所定の駐車領域に駐車される共用車両の貸出状況が管理されるため、従来のようにGPSなどにより取得される車両位置に関する情報を用いなくとも、共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の共用車両管理装置の一実施形態のブロック図である。
【図2】撮影画像の一例を示す図である。
【図3】画像取得処理を示すフローチャートである。
【図4】画像格納処理を示すフローチャートである。
【図5】返却判定処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施形態について、図1〜図5を参照して説明する。
【0010】
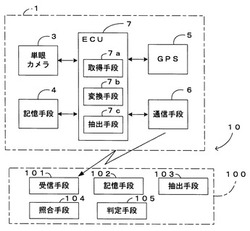
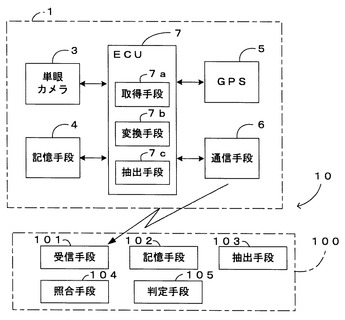
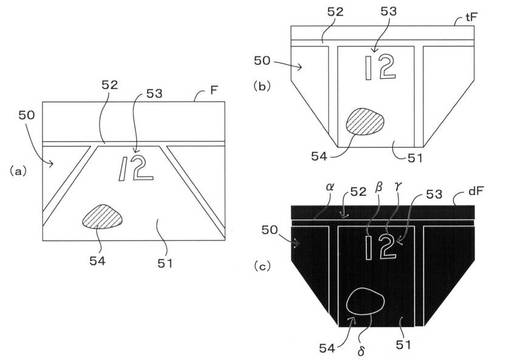
図1は、駐車場50の駐車領域51に駐車される共用車両1の貸出状況を管理する本発明の共用車両管理装置10の一実施形態のブロック図である。図2は撮影画像Fの一例を示す図であって、(a)は撮影画像F、(b)は路面上に仮想面が設定されて(a)が射影変換された上方視画像tF、(c)は(b)の微分画像である。図3は画像取得処理を示すフローチャートである。図4は画像格納処理を示すフローチャートである。図5は返却判定処理を示すフローチャートである。
【0011】
<共用車両1の構成>
図1に示す共用車両1は、駐車場50の所定の駐車領域51に駐車されて、例えばインターネットを利用した予約システムなどの予約手段を介して予約されることより、予め登録された複数のユーザに共用されるものであって、単眼カメラ3と、単眼カメラ3の撮影画像Fや種々のデータを記憶する記憶手段4と、共用車両1の現在位置に関する情報を出力するGPS5と、後述する管制装置100との間で各種データの送受信を行う通信手段6と、単眼カメラ3の撮影画像Fを処理するマイクロコンピュータ構成のECU7とを備えている。
【0012】
単眼カメラ3(本発明の「認識手段」に相当)は共用車両1に搭載され共用車両1の周辺環境を認識するためのものであって、この実施形態では共用車両1の前方および後方の撮影が可能なモノクロあるいはカラー撮影が可能な2つのカメラから成り、連続的に時々刻々と撮影した撮影画像Fの信号を出力する(図2(a)参照)。また、共用車両1の前方および後方の路面撮影を行なうため、単眼カメラ3は、共用車両1の車内の前方の上部位置と、後部バンパや共用車両1の車内の後方の上部位置とに、上方から適当な角度で斜め下の路面をねらうように設けられている。なお、単眼カメラ3の構成としては、プリズムやミラーなどの光学系を利用することにより、共用車両1の前後方向や全周囲が撮影可能に構成されたものでもよい。
【0013】
記憶手段4は、各種メモリやハードディスクドライブなどを備え、単眼カメラ3から時々刻々と出力される撮影画像Fに対してECU6により種々の処理を施す際に使用される各種データ、撮影画像Fに対してECU7により種々の処理が施されることにより得られた各種データなどを格納する。
【0014】
GPS5は、受信したGPS信号に基づいて共用車両1の現在位置を検出し、共用車両1の現在位置に関する情報をECU7に出力する。
【0015】
通信手段6は、GPS5により取得された共用車両1の現在位置に関する情報や、撮影画像Fに対してECU7により種々の処理が施されることにより得られた各種データを後述する管制装置100に送信する。
【0016】
ECU7は、例えばイグニッションキーのオンにより、予め設定された周辺環境認識のプログラムを実行することにより以下の各手段を備えている。
【0017】
(1)取得手段7a
取得手段7aは、単眼カメラ3により時々刻々と撮影された撮影画像Fを取得する。例えば、図2(a)に示すように、単眼カメラ3により撮影された撮影画像Fには、共用車両1が駐車される駐車場50の所定の駐車領域51が周辺環境として撮影されており、取得手段7aはこの撮影画像Fを取得する。
【0018】
(2)変換手段7b
変換手段7bは、単眼カメラ3により時々刻々と撮影された各時刻における撮影画像Fを、路面に仮想面を設定し、図2(b)に示す上方視画像tFに射影変換する。そして、単眼カメラ3により時系列に撮影されて変換手段7cにより射影変換される各フレームの撮影画像Fに関する種々のデータは記憶手段4に記憶される。
【0019】
(3)抽出手段7c
抽出手段7cは、共用車両1貸出の際および返却の際の駐車領域51界隈の撮影画像Fに基づく上方視画像tFに微分フィルタ処理などの処理を施して、図2(c)に示すエッジ画像dFを生成し、上方視画像tF(撮影画像F)に含まれる、駐車領域51界隈の、白線52、駐車位置ナンバー53などの路面表示物、フェンスなどの建造物、車止めなどの固定物、水溜り54、日影などの構成物を示すエッジを抽出する。
【0020】
ところで、共用車両1貸出の際および返却の際における、駐車領域51界隈の撮影画像Fの上方視画像tFを得るためには、単眼カメラ3により撮影された撮影画像Fから駐車領域51界隈が撮影された撮影画像Fを取得する必要があるが、エンジン始動開始から時々刻々と単眼カメラ3から出力される複数の撮影画像Fから駐車領域51界隈の周辺環境が撮影された特定の撮影画像Fを取得することは困難である。
【0021】
そこで、この実施形態では、取得手段7aは、共用車両1貸出の際に、例えば、エンジン始動後に共用車両1が所定の駐車領域51から移動を開始してからの数秒間における複数の撮影画像Fを取得する。そして、取得した撮影画像Fに基づく上方視画像tFどうしの差分を取るなどして、駐車領域51界隈の前記構成物の上方視画像tF内での位置を特定することにより、複数の上方視画像tFを重ね合わせて一の上方視画像tF、すなわち、所定の駐車領域51界隈が含まれた上方視画像tFを生成して、抽出手段7cは、生成した一の上方視画像tFのエッジ画像dFを生成する。
【0022】
また、取得手段7aは、共用車両1返却の際に、例えば、共用車両1が駐車領域51に駐車される際のエンジン停止前の数秒間における複数の撮影画像Fを取得する。そして、取得した撮影画像Fに基づく上方視画像tFどうしの差分を取るなどして、駐車領域51界隈の前記構成物の上方視画像tF内での位置を特定することにより、複数の上方視画像tFを重ね合わせて一の上方視画像tFを生成して、抽出手段7cは、生成した一の上方視画像tFのエッジ画像dFを生成する。
【0023】
そして、抽出手段7cにより生成されたエッジ画像dFは記憶手段4に記憶されて、所定のタイミングで後述する管制装置100に通信手段6を介して送信される。
【0024】
なお、駐車領域51界隈の撮影画像Fを適正に取得するには、駐車される共用車両1の駐車領域51に対する向きに応じて、共用車両1の前方側の単眼カメラ3または後方側の単眼カメラ3による撮影画像Fを適宜、取得手段7aにより取得すればよい。
【0025】
<管制装置100の構成>
図1に示す管制装置100は駐車場50に設けられ、所定の駐車領域51に駐車される共用車両1の貸出状況を管理するものであって、共用車両1と各種データの送受信を行う通信手段101を備えている。また、管制装置100は、マイクロコンピュータ構成の制御装置を備え、各種データを記憶する記憶手段102、通信手段101を介して共用車両1から受信したエッジ画像dFから各種特徴を抽出する抽出手段103、記憶手段102に記憶された複数のエッジ画像dFどうしの照合を行う照合手段104、照合手段104の照合結果に基づいて共用車両1が返却されたか否かの判定を行う判定手段105としての機能を備えている。
【0026】
通信手段101は、共用車両1から送信されるGPS5に基づく共用車両1の現在位置に関する情報や、抽出手段7cによるエッジ画像dFなどの各種データを受信して記憶手段102に送る。
【0027】
記憶手段102は、各種メモリやハードディスクドライブなどを備え、通信手段101を介して共用車両1から受信した、共用車両1の現在位置に関する情報、共用車両1により生成されたエッジ画像dFなどの各種データを記憶する。
【0028】
抽出手段103は、通信手段101を介して共用車両1から受信したエッジ画像dFに含まれる、駐車領域51界隈の、白線52、駐車位置ナンバー53などの路面表示物、建造物、固定物、水溜り54、日影などの構成物を示すエッジを抽出し、各エッジごとに、例えば、図2(c)に示すように、”α”、”β”、”γ”、”δ”などのラベルを付す。そして、抽出手段103により付された各ラベルと、各エッジにラベルが付されたエッジ画像dFとが対応付けられて記憶手段102に記憶される。
【0029】
なお、この実施形態では、共用車両1貸出の際に取得された撮影画像Fに基づいて抽出されたエッジ画像dFに含まれる駐車領域51界隈の前記構成物を示す各エッジは、所定の駐車領域51界隈の「基準構成物」のエッジを示すものとして、当該貸出の際のエッジ画像dFが記憶手段102に記憶される。また、エッジ画像dFに含まれる各エッジに付されるラベルは、各エッジを識別することができれば、ラベル番号を付すなど、どのようなものであってもよい。
【0030】
照合手段104は、共用車両1貸出の際の単眼カメラ3による撮影画像Fから抽出されて記憶手段102に記憶された駐車領域51界隈の基準構成物と、共用車両1返却の際の単眼カメラ3による撮影画像Fから抽出された駐車領域51界隈の構成物とをパターン認識により照合する。すなわち、照合手段104は、記憶手段102に記憶された共用車両1貸出の際のエッジ画像dFに含まれる各エッジα,β,γ,δと、共用車両1返却の際のエッジ画像dFに含まれる各エッジα,β,γ,δとを照合する。
【0031】
判定手段105は、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定する。例えば、判定手段105は、照合手段104による両エッジ画像dFに含まれる各エッジα,β,γ,δの照合結果に基づいて、両撮影画像F(エッジ画像dF)に同一の駐車領域51が含まれているか否かを判定することにより、共用車両1が所定の駐車領域51に返却されたか否かを判定する。
【0032】
ところで、共用車両1貸出の際に存在した水溜り54は、共用車両1返却の際に消失しているおそれもあるが、判定手段105は、照合手段104により照合される両エッジ画像dFに含まれる各エッジα,β,γ,δのうち、所定の数以上のエッジが一致すれば、両エッジ画像dF、すなわち、撮影画像Fに含まれる駐車領域51は同一の領域であると判定する。
【0033】
このようすれば、上方視画像tFやエッジ画像dFどうしのパターン認識による異同のみに基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定する構成に比べ、大きな日影や水溜り54など、共用車両1貸出の際には存在するが、返却の際には消失しているおそれのある構成物が共用車両1貸出の際の撮影画像Fに含まれているときであっても、共用車両1貸出の際および返却の際の撮影画像Fに基づいて共用車両1が所定の駐車領域51に返却されたか否かを適正に判定することができる。また、大きな日影や水溜り54などの構成物が共用車両1貸出の際の撮影画像Fには含まれておらず、返却の際の撮影画像Fには含まれているときであっても、同様にして共用車両1貸出の際および返却の際の撮影画像Fに基づいて共用車両1が所定の駐車領域51に返却されたか否かを適正に判定することができる。
【0034】
また、判定手段105は、共用車両1が所定の駐車領域51に返却されているか否かの判定の際に、GPS5により取得されて共用車両1から受信することにより記憶手段102に記憶された共用車両1の現在位置に関する情報も参照して、共用車両1が所定の駐車領域51に返却されたか否かを判定する。このようにすれば、共用車両1が所定の駐車領域51とは異なる駐車領域に駐車されたのにも関わらず、共用車両1貸出の際および返却の際の撮影画像Fに基づく両エッジ画像dFにほぼ異同がなく、両エッジ画像dFのパターン認識のみによる判定では「共用車両1が返却された」と判定される場合であっても、GPS5により共用車両1のおおよその現在位置を認識することができるため、共用車両1が所定の駐車領域51に返却されたと誤って判定するおそれがない。
【0035】
次に、上記したように構成された共用車両管理装置10の動作について図3〜図5を参照して説明する。
【0036】
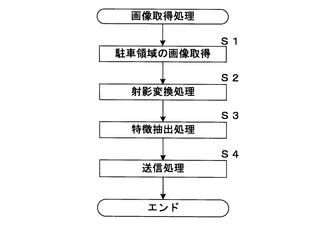
<画像取得処理>
図3に示す画像取得処理は、共用車両1貸出の際および返却の際に共用車両1において実行される処理であり、駐車領域51の撮影画像Fが取得手段7aにより取得され(ステップS1)、変換手段7bにより上方視画像tFに射影変換される(ステップS2)。そして、上方視画像tFが微分処理されてエッジ画像dFが生成されて、撮影画像Fに含まれる駐車領域51界隈の構成物を示す各エッジが抽出手段7cにより抽出されて(ステップS3)、各構成物を示すエッジが抽出されたエッジ画像dFが管制装置100に送信される(ステップS4)。
【0037】
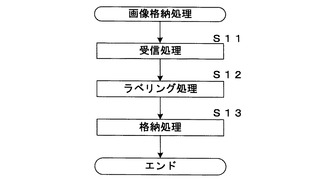
<画像格納処理>
図4に示す画像格納処理は、共用車両1からエッジ画像dFが管制装置100に送信される際に管制装置100において実行される処理であり、共用車両1から送信されたエッジ画像dFが通信手段101により受信され(ステップS11)、受信されたエッジ画像dFに含まれる各エッジに抽出手段103によりラベルが付されて(ステップS12)、各エッジにラベルが付されたエッジ画像dFが記憶手段102に記憶される(ステップS13)。
【0038】
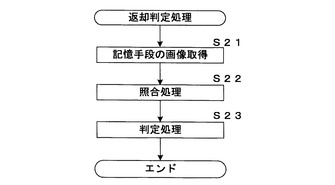
<返却格納処理>
図5に示す返却判定処理は、共用車両1返却の際に管制装置100において実行される処理であり、記憶手段102に記憶された、共用車両1貸出の際のエッジ画像dFおよび返却の際のエッジ画像dFが取得され(ステップS21)、両エッジ画像dFに含まれる各エッジが照合手段104により照合されて(ステップS22)、共用車両1が所定の駐車領域51に返却されたか否かが判定手段105により判定される(ステップS23)。
【0039】
以上のように、この実施形態によれば、共用車両1に搭載され共用車両1の周辺環境を撮影する単眼カメラ3の撮影画像Fに基づいて認識された周辺環境としての駐車場50の所定の駐車領域51界隈の基準構成物が記憶手段102に記憶されており、共用車両1が駐車されたときに、単眼カメラ3の撮影画像Fに基づいて認識された共用車両1が駐車された駐車領域51界隈の構成物と、記憶手段102に記憶された基準構成物とが照合手段104により照合され、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域51に返却されているか否かが判定手段105により判定されて、所定の駐車領域51に駐車される共用車両1の貸出状況が管理されるため、従来のようにGPS5などにより取得される車両位置に関する情報を用いなくとも、共用車両1が所定の駐車領域51に返却されたか否かを確実に判定することができる。
【0040】
また、GPS5による共用車両1の現在位置に関する情報を利用して共用車両1が所定の駐車領域51に返却されたか否かを判定する構成に加えて、上記した実施形態による構成により共用車両1が所定の駐車領域に返却されたか否かを判定することにより、GPSの精度が悪いときであっても、共用車両1が所定の駐車領域51に返却されたか否かを確実に判定することができるため、共用車両1の貸出状況を管理する際に、共用車両1が所定の駐車領域51に返却されたか否かを判定する判定精度の向上を図ることができる。
【0041】
なお、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行うことが可能であり、例えば、共用車両1貸出の際の撮影画像F(上方視画像tF、エッジ画像dF)と返却の際の撮影画像F(上方視画像tF、エッジ画像dF)とのパターン認識による異同を検出することにより、両撮影画像F(上方視画像tF、エッジ画像dF)が一致するか否かに基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定するようにしてもよい。
【0042】
また、本発明の認識手段としては、上記した単眼カメラ3に限られず、例えばレーザレーダによる駐車領域51界隈の構成物との距離情報に基づいて周辺環境を認識し、認識された駐車領域51界隈の構成物を、共用車両1貸出の際と返却の際とで比較することにより、共用車両1が所定の駐車領域51に返却されたか否かを判定するようにしてもよい。
【0043】
また、通信手段6,101の通信方法としてはどのようなものであってもよいが、所謂、モバイルコンピュータにおける無線LAN規格を利用してデータ通信を行ったり、携帯電話端末で用いられるパケット通信規格を利用してデータ通信を行ってもよく、通信手段6,101間で各種データを送受信できれば、どのような通信方法であってもよい。
【0044】
また、記憶手段102に記憶される、所定の駐車領域51界隈の基準構成物は、予め記憶手段102に格納しておくこともでき、このようにすれば、共用車両1貸出の際に認識手段により基準構成物を取得しなくともよい。
【0045】
また、共用車両1から撮影画像Fを管制装置100に送信することにより、撮影画像Fに施される各種画像処理を管制装置100で行ってもよく、また、上記した共用車両1が返却されたか否かを判定するまでの全ての処理を共用車両1で実行し、判定結果のみを管制装置100に送信するようにしてもよい。すなわち、共用車両管理装置10の構成や処理手順などが上記実施形態と異なっていてもよいのはもちろんである。
【0046】
また、共用車両1においてECU7により実現される取得手段7a、変換手段7b、抽出手段7cなどの各種機能を、自車両周辺の障害物認識のための画像処理に用いられる機能と共用することにより、より実用的な構成で共用車両管理装置10を構成することができる。
【符号の説明】
【0047】
1 共用車両
3 単眼カメラ3(認識手段)
10 共用車両管理装置
50 駐車場
51 駐車領域
52 白線(構成物)
53 駐車位置ナンバー(構成物)
54 水溜り(構成物)
102 記憶手段
104 照合手段
105 判定手段
【技術分野】
【0001】
この発明は、駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する技術に関する。
【背景技術】
【0002】
従来、GPSにより取得される共用車両の位置に基づいて、共用車両が駐車場の所定の駐車領域に返却されたか否かを管理する技術が知られている(例えば、特許文献1参照)。すなわち、GPSにより取得された自車位置に関する情報が共用車両から駐車場に設けられた管制装置に送信され、共用車両の自車位置に関する情報に基づいて、共用車両が駐車場に設定された入庫エリア内にあるか否かが管制装置により判定される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−293794号公報(段落[0046]〜[0060]、図9〜13など)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、GPS衛星の管理状況や太陽の活動状況など、種々の状況に応じてGPSの位置精度が変動することが知られており、約50m程度の位置誤差は常に生じるおそれがある。このようにGPSの位置精度が悪くなると、GPSにより取得された車両位置に基づいて共用車両が返却されたか否かが判定された場合に、共用車両が所定の駐車領域に返却されているにも関わらず、共用車両が返却されていないと判定されるおそれがある。また、駐車場がビル内などにある場合には、GPS情報を受信することができないため、共用車両の位置を特定できないという問題があった。
【0005】
本発明は、上記課題に鑑みてなされたものであり、共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した目的を達成するために、本発明の共用車両管理装置は、駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する共用車両管理装置において、前記共用車両に搭載され前記共用車両の周辺環境を認識する認識手段と、前記認識手段により認識された周辺環境としての前記所定の駐車領域界隈の基準構成物を記憶する記憶手段と、前記認識手段により認識された前記共用車両が駐車された駐車領域界隈の構成物と、前記記憶手段に記憶された前記基準構成物とを照合する照合手段と、前記照合手段による照合結果に基づいて前記共用車両が前記所定の駐車領域に返却されているか否かを判定する判定手段とを備えたことを特徴としている。
【発明の効果】
【0007】
請求項1に記載の発明によれば、共用車両に搭載され共用車両の周辺環境を認識する認識手段より認識された周辺環境としての駐車場の所定の駐車領域界隈の基準構成物が記憶手段に記憶されており、共用車両が駐車されたときに、認識手段により認識された共用車両が駐車された駐車領域界隈の構成物と、記憶手段に記憶された基準構成物とが照合手段により照合され、照合手段による照合結果に基づいて共用車両が所定の駐車領域に返却されているか否かが判定手段により判定されて、所定の駐車領域に駐車される共用車両の貸出状況が管理されるため、従来のようにGPSなどにより取得される車両位置に関する情報を用いなくとも、共用車両が所定の駐車領域に返却されたか否かを確実に判定することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の共用車両管理装置の一実施形態のブロック図である。
【図2】撮影画像の一例を示す図である。
【図3】画像取得処理を示すフローチャートである。
【図4】画像格納処理を示すフローチャートである。
【図5】返却判定処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施形態について、図1〜図5を参照して説明する。
【0010】
図1は、駐車場50の駐車領域51に駐車される共用車両1の貸出状況を管理する本発明の共用車両管理装置10の一実施形態のブロック図である。図2は撮影画像Fの一例を示す図であって、(a)は撮影画像F、(b)は路面上に仮想面が設定されて(a)が射影変換された上方視画像tF、(c)は(b)の微分画像である。図3は画像取得処理を示すフローチャートである。図4は画像格納処理を示すフローチャートである。図5は返却判定処理を示すフローチャートである。
【0011】
<共用車両1の構成>
図1に示す共用車両1は、駐車場50の所定の駐車領域51に駐車されて、例えばインターネットを利用した予約システムなどの予約手段を介して予約されることより、予め登録された複数のユーザに共用されるものであって、単眼カメラ3と、単眼カメラ3の撮影画像Fや種々のデータを記憶する記憶手段4と、共用車両1の現在位置に関する情報を出力するGPS5と、後述する管制装置100との間で各種データの送受信を行う通信手段6と、単眼カメラ3の撮影画像Fを処理するマイクロコンピュータ構成のECU7とを備えている。
【0012】
単眼カメラ3(本発明の「認識手段」に相当)は共用車両1に搭載され共用車両1の周辺環境を認識するためのものであって、この実施形態では共用車両1の前方および後方の撮影が可能なモノクロあるいはカラー撮影が可能な2つのカメラから成り、連続的に時々刻々と撮影した撮影画像Fの信号を出力する(図2(a)参照)。また、共用車両1の前方および後方の路面撮影を行なうため、単眼カメラ3は、共用車両1の車内の前方の上部位置と、後部バンパや共用車両1の車内の後方の上部位置とに、上方から適当な角度で斜め下の路面をねらうように設けられている。なお、単眼カメラ3の構成としては、プリズムやミラーなどの光学系を利用することにより、共用車両1の前後方向や全周囲が撮影可能に構成されたものでもよい。
【0013】
記憶手段4は、各種メモリやハードディスクドライブなどを備え、単眼カメラ3から時々刻々と出力される撮影画像Fに対してECU6により種々の処理を施す際に使用される各種データ、撮影画像Fに対してECU7により種々の処理が施されることにより得られた各種データなどを格納する。
【0014】
GPS5は、受信したGPS信号に基づいて共用車両1の現在位置を検出し、共用車両1の現在位置に関する情報をECU7に出力する。
【0015】
通信手段6は、GPS5により取得された共用車両1の現在位置に関する情報や、撮影画像Fに対してECU7により種々の処理が施されることにより得られた各種データを後述する管制装置100に送信する。
【0016】
ECU7は、例えばイグニッションキーのオンにより、予め設定された周辺環境認識のプログラムを実行することにより以下の各手段を備えている。
【0017】
(1)取得手段7a
取得手段7aは、単眼カメラ3により時々刻々と撮影された撮影画像Fを取得する。例えば、図2(a)に示すように、単眼カメラ3により撮影された撮影画像Fには、共用車両1が駐車される駐車場50の所定の駐車領域51が周辺環境として撮影されており、取得手段7aはこの撮影画像Fを取得する。
【0018】
(2)変換手段7b
変換手段7bは、単眼カメラ3により時々刻々と撮影された各時刻における撮影画像Fを、路面に仮想面を設定し、図2(b)に示す上方視画像tFに射影変換する。そして、単眼カメラ3により時系列に撮影されて変換手段7cにより射影変換される各フレームの撮影画像Fに関する種々のデータは記憶手段4に記憶される。
【0019】
(3)抽出手段7c
抽出手段7cは、共用車両1貸出の際および返却の際の駐車領域51界隈の撮影画像Fに基づく上方視画像tFに微分フィルタ処理などの処理を施して、図2(c)に示すエッジ画像dFを生成し、上方視画像tF(撮影画像F)に含まれる、駐車領域51界隈の、白線52、駐車位置ナンバー53などの路面表示物、フェンスなどの建造物、車止めなどの固定物、水溜り54、日影などの構成物を示すエッジを抽出する。
【0020】
ところで、共用車両1貸出の際および返却の際における、駐車領域51界隈の撮影画像Fの上方視画像tFを得るためには、単眼カメラ3により撮影された撮影画像Fから駐車領域51界隈が撮影された撮影画像Fを取得する必要があるが、エンジン始動開始から時々刻々と単眼カメラ3から出力される複数の撮影画像Fから駐車領域51界隈の周辺環境が撮影された特定の撮影画像Fを取得することは困難である。
【0021】
そこで、この実施形態では、取得手段7aは、共用車両1貸出の際に、例えば、エンジン始動後に共用車両1が所定の駐車領域51から移動を開始してからの数秒間における複数の撮影画像Fを取得する。そして、取得した撮影画像Fに基づく上方視画像tFどうしの差分を取るなどして、駐車領域51界隈の前記構成物の上方視画像tF内での位置を特定することにより、複数の上方視画像tFを重ね合わせて一の上方視画像tF、すなわち、所定の駐車領域51界隈が含まれた上方視画像tFを生成して、抽出手段7cは、生成した一の上方視画像tFのエッジ画像dFを生成する。
【0022】
また、取得手段7aは、共用車両1返却の際に、例えば、共用車両1が駐車領域51に駐車される際のエンジン停止前の数秒間における複数の撮影画像Fを取得する。そして、取得した撮影画像Fに基づく上方視画像tFどうしの差分を取るなどして、駐車領域51界隈の前記構成物の上方視画像tF内での位置を特定することにより、複数の上方視画像tFを重ね合わせて一の上方視画像tFを生成して、抽出手段7cは、生成した一の上方視画像tFのエッジ画像dFを生成する。
【0023】
そして、抽出手段7cにより生成されたエッジ画像dFは記憶手段4に記憶されて、所定のタイミングで後述する管制装置100に通信手段6を介して送信される。
【0024】
なお、駐車領域51界隈の撮影画像Fを適正に取得するには、駐車される共用車両1の駐車領域51に対する向きに応じて、共用車両1の前方側の単眼カメラ3または後方側の単眼カメラ3による撮影画像Fを適宜、取得手段7aにより取得すればよい。
【0025】
<管制装置100の構成>
図1に示す管制装置100は駐車場50に設けられ、所定の駐車領域51に駐車される共用車両1の貸出状況を管理するものであって、共用車両1と各種データの送受信を行う通信手段101を備えている。また、管制装置100は、マイクロコンピュータ構成の制御装置を備え、各種データを記憶する記憶手段102、通信手段101を介して共用車両1から受信したエッジ画像dFから各種特徴を抽出する抽出手段103、記憶手段102に記憶された複数のエッジ画像dFどうしの照合を行う照合手段104、照合手段104の照合結果に基づいて共用車両1が返却されたか否かの判定を行う判定手段105としての機能を備えている。
【0026】
通信手段101は、共用車両1から送信されるGPS5に基づく共用車両1の現在位置に関する情報や、抽出手段7cによるエッジ画像dFなどの各種データを受信して記憶手段102に送る。
【0027】
記憶手段102は、各種メモリやハードディスクドライブなどを備え、通信手段101を介して共用車両1から受信した、共用車両1の現在位置に関する情報、共用車両1により生成されたエッジ画像dFなどの各種データを記憶する。
【0028】
抽出手段103は、通信手段101を介して共用車両1から受信したエッジ画像dFに含まれる、駐車領域51界隈の、白線52、駐車位置ナンバー53などの路面表示物、建造物、固定物、水溜り54、日影などの構成物を示すエッジを抽出し、各エッジごとに、例えば、図2(c)に示すように、”α”、”β”、”γ”、”δ”などのラベルを付す。そして、抽出手段103により付された各ラベルと、各エッジにラベルが付されたエッジ画像dFとが対応付けられて記憶手段102に記憶される。
【0029】
なお、この実施形態では、共用車両1貸出の際に取得された撮影画像Fに基づいて抽出されたエッジ画像dFに含まれる駐車領域51界隈の前記構成物を示す各エッジは、所定の駐車領域51界隈の「基準構成物」のエッジを示すものとして、当該貸出の際のエッジ画像dFが記憶手段102に記憶される。また、エッジ画像dFに含まれる各エッジに付されるラベルは、各エッジを識別することができれば、ラベル番号を付すなど、どのようなものであってもよい。
【0030】
照合手段104は、共用車両1貸出の際の単眼カメラ3による撮影画像Fから抽出されて記憶手段102に記憶された駐車領域51界隈の基準構成物と、共用車両1返却の際の単眼カメラ3による撮影画像Fから抽出された駐車領域51界隈の構成物とをパターン認識により照合する。すなわち、照合手段104は、記憶手段102に記憶された共用車両1貸出の際のエッジ画像dFに含まれる各エッジα,β,γ,δと、共用車両1返却の際のエッジ画像dFに含まれる各エッジα,β,γ,δとを照合する。
【0031】
判定手段105は、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定する。例えば、判定手段105は、照合手段104による両エッジ画像dFに含まれる各エッジα,β,γ,δの照合結果に基づいて、両撮影画像F(エッジ画像dF)に同一の駐車領域51が含まれているか否かを判定することにより、共用車両1が所定の駐車領域51に返却されたか否かを判定する。
【0032】
ところで、共用車両1貸出の際に存在した水溜り54は、共用車両1返却の際に消失しているおそれもあるが、判定手段105は、照合手段104により照合される両エッジ画像dFに含まれる各エッジα,β,γ,δのうち、所定の数以上のエッジが一致すれば、両エッジ画像dF、すなわち、撮影画像Fに含まれる駐車領域51は同一の領域であると判定する。
【0033】
このようすれば、上方視画像tFやエッジ画像dFどうしのパターン認識による異同のみに基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定する構成に比べ、大きな日影や水溜り54など、共用車両1貸出の際には存在するが、返却の際には消失しているおそれのある構成物が共用車両1貸出の際の撮影画像Fに含まれているときであっても、共用車両1貸出の際および返却の際の撮影画像Fに基づいて共用車両1が所定の駐車領域51に返却されたか否かを適正に判定することができる。また、大きな日影や水溜り54などの構成物が共用車両1貸出の際の撮影画像Fには含まれておらず、返却の際の撮影画像Fには含まれているときであっても、同様にして共用車両1貸出の際および返却の際の撮影画像Fに基づいて共用車両1が所定の駐車領域51に返却されたか否かを適正に判定することができる。
【0034】
また、判定手段105は、共用車両1が所定の駐車領域51に返却されているか否かの判定の際に、GPS5により取得されて共用車両1から受信することにより記憶手段102に記憶された共用車両1の現在位置に関する情報も参照して、共用車両1が所定の駐車領域51に返却されたか否かを判定する。このようにすれば、共用車両1が所定の駐車領域51とは異なる駐車領域に駐車されたのにも関わらず、共用車両1貸出の際および返却の際の撮影画像Fに基づく両エッジ画像dFにほぼ異同がなく、両エッジ画像dFのパターン認識のみによる判定では「共用車両1が返却された」と判定される場合であっても、GPS5により共用車両1のおおよその現在位置を認識することができるため、共用車両1が所定の駐車領域51に返却されたと誤って判定するおそれがない。
【0035】
次に、上記したように構成された共用車両管理装置10の動作について図3〜図5を参照して説明する。
【0036】
<画像取得処理>
図3に示す画像取得処理は、共用車両1貸出の際および返却の際に共用車両1において実行される処理であり、駐車領域51の撮影画像Fが取得手段7aにより取得され(ステップS1)、変換手段7bにより上方視画像tFに射影変換される(ステップS2)。そして、上方視画像tFが微分処理されてエッジ画像dFが生成されて、撮影画像Fに含まれる駐車領域51界隈の構成物を示す各エッジが抽出手段7cにより抽出されて(ステップS3)、各構成物を示すエッジが抽出されたエッジ画像dFが管制装置100に送信される(ステップS4)。
【0037】
<画像格納処理>
図4に示す画像格納処理は、共用車両1からエッジ画像dFが管制装置100に送信される際に管制装置100において実行される処理であり、共用車両1から送信されたエッジ画像dFが通信手段101により受信され(ステップS11)、受信されたエッジ画像dFに含まれる各エッジに抽出手段103によりラベルが付されて(ステップS12)、各エッジにラベルが付されたエッジ画像dFが記憶手段102に記憶される(ステップS13)。
【0038】
<返却格納処理>
図5に示す返却判定処理は、共用車両1返却の際に管制装置100において実行される処理であり、記憶手段102に記憶された、共用車両1貸出の際のエッジ画像dFおよび返却の際のエッジ画像dFが取得され(ステップS21)、両エッジ画像dFに含まれる各エッジが照合手段104により照合されて(ステップS22)、共用車両1が所定の駐車領域51に返却されたか否かが判定手段105により判定される(ステップS23)。
【0039】
以上のように、この実施形態によれば、共用車両1に搭載され共用車両1の周辺環境を撮影する単眼カメラ3の撮影画像Fに基づいて認識された周辺環境としての駐車場50の所定の駐車領域51界隈の基準構成物が記憶手段102に記憶されており、共用車両1が駐車されたときに、単眼カメラ3の撮影画像Fに基づいて認識された共用車両1が駐車された駐車領域51界隈の構成物と、記憶手段102に記憶された基準構成物とが照合手段104により照合され、照合手段104による照合結果に基づいて共用車両1が所定の駐車領域51に返却されているか否かが判定手段105により判定されて、所定の駐車領域51に駐車される共用車両1の貸出状況が管理されるため、従来のようにGPS5などにより取得される車両位置に関する情報を用いなくとも、共用車両1が所定の駐車領域51に返却されたか否かを確実に判定することができる。
【0040】
また、GPS5による共用車両1の現在位置に関する情報を利用して共用車両1が所定の駐車領域51に返却されたか否かを判定する構成に加えて、上記した実施形態による構成により共用車両1が所定の駐車領域に返却されたか否かを判定することにより、GPSの精度が悪いときであっても、共用車両1が所定の駐車領域51に返却されたか否かを確実に判定することができるため、共用車両1の貸出状況を管理する際に、共用車両1が所定の駐車領域51に返却されたか否かを判定する判定精度の向上を図ることができる。
【0041】
なお、本発明は上記した実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行うことが可能であり、例えば、共用車両1貸出の際の撮影画像F(上方視画像tF、エッジ画像dF)と返却の際の撮影画像F(上方視画像tF、エッジ画像dF)とのパターン認識による異同を検出することにより、両撮影画像F(上方視画像tF、エッジ画像dF)が一致するか否かに基づいて共用車両1が所定の駐車領域51に返却されたか否かを判定するようにしてもよい。
【0042】
また、本発明の認識手段としては、上記した単眼カメラ3に限られず、例えばレーザレーダによる駐車領域51界隈の構成物との距離情報に基づいて周辺環境を認識し、認識された駐車領域51界隈の構成物を、共用車両1貸出の際と返却の際とで比較することにより、共用車両1が所定の駐車領域51に返却されたか否かを判定するようにしてもよい。
【0043】
また、通信手段6,101の通信方法としてはどのようなものであってもよいが、所謂、モバイルコンピュータにおける無線LAN規格を利用してデータ通信を行ったり、携帯電話端末で用いられるパケット通信規格を利用してデータ通信を行ってもよく、通信手段6,101間で各種データを送受信できれば、どのような通信方法であってもよい。
【0044】
また、記憶手段102に記憶される、所定の駐車領域51界隈の基準構成物は、予め記憶手段102に格納しておくこともでき、このようにすれば、共用車両1貸出の際に認識手段により基準構成物を取得しなくともよい。
【0045】
また、共用車両1から撮影画像Fを管制装置100に送信することにより、撮影画像Fに施される各種画像処理を管制装置100で行ってもよく、また、上記した共用車両1が返却されたか否かを判定するまでの全ての処理を共用車両1で実行し、判定結果のみを管制装置100に送信するようにしてもよい。すなわち、共用車両管理装置10の構成や処理手順などが上記実施形態と異なっていてもよいのはもちろんである。
【0046】
また、共用車両1においてECU7により実現される取得手段7a、変換手段7b、抽出手段7cなどの各種機能を、自車両周辺の障害物認識のための画像処理に用いられる機能と共用することにより、より実用的な構成で共用車両管理装置10を構成することができる。
【符号の説明】
【0047】
1 共用車両
3 単眼カメラ3(認識手段)
10 共用車両管理装置
50 駐車場
51 駐車領域
52 白線(構成物)
53 駐車位置ナンバー(構成物)
54 水溜り(構成物)
102 記憶手段
104 照合手段
105 判定手段
【特許請求の範囲】
【請求項1】
駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する共用車両管理装置において、
前記共用車両に搭載され前記共用車両の周辺環境を認識する認識手段と、
前記認識手段により認識された周辺環境としての前記所定の駐車領域界隈の基準構成物を記憶する記憶手段と、
前記認識手段により認識された前記共用車両が駐車された駐車領域界隈の構成物と、前記記憶手段に記憶された前記基準構成物とを照合する照合手段と、
前記照合手段による照合結果に基づいて前記共用車両が前記所定の駐車領域に返却されているか否かを判定する判定手段と
を備えたことを特徴とする共用車両管理装置。
【請求項1】
駐車場の所定の駐車領域に駐車される共用車両の貸出状況を管理する共用車両管理装置において、
前記共用車両に搭載され前記共用車両の周辺環境を認識する認識手段と、
前記認識手段により認識された周辺環境としての前記所定の駐車領域界隈の基準構成物を記憶する記憶手段と、
前記認識手段により認識された前記共用車両が駐車された駐車領域界隈の構成物と、前記記憶手段に記憶された前記基準構成物とを照合する照合手段と、
前記照合手段による照合結果に基づいて前記共用車両が前記所定の駐車領域に返却されているか否かを判定する判定手段と
を備えたことを特徴とする共用車両管理装置。
【図1】


【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【図2】
【公開番号】特開2011−197728(P2011−197728A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−60578(P2010−60578)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]