
内燃機関の出力特性制御装置
【課題】運転技量の差による燃費効果のバラつきを抑制する。
【解決手段】車両に搭載された内燃機関の出力特性を制御する出力特性制御装置であって、自車が走行している道路交通環境を検出する道路交通環境検出手段(S1)と、検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段(S1)と、推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する内燃機関の出力が低下するように、内燃機関の目標出力特性を設定する目標出力特性設定手段(S1)と、内燃機関の出力特性を前記目標出力特性へと変更する出力特性変更手段(S4)と、を備えることを特徴とする内燃機関の出力特性制御装置。
【解決手段】車両に搭載された内燃機関の出力特性を制御する出力特性制御装置であって、自車が走行している道路交通環境を検出する道路交通環境検出手段(S1)と、検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段(S1)と、推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する内燃機関の出力が低下するように、内燃機関の目標出力特性を設定する目標出力特性設定手段(S1)と、内燃機関の出力特性を前記目標出力特性へと変更する出力特性変更手段(S4)と、を備えることを特徴とする内燃機関の出力特性制御装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は内燃機関の出力特性制御装置に関する。
【背景技術】
【0002】
特許文献1に記載の車両の制御装置は、アクセルペダルの踏み込み量(以下「アクセル操作量」という。)とスロットル弁の開度(以下「スロットル開度」という。)とを関連付けたテーブル(以下「出力特性テーブル」という。)を予め記憶しておき、この出力特性テーブルを参照してアクセル操作量に基づきスロットル開度を制御していた。そして、出力特性テーブルとして、通常走行用テーブルと渋滞走行用テーブルの2つを予め記憶しておき、走行シーンに応じて参照する出力特性テーブルを切り替えていた。渋滞走行用テーブルは、アクセル操作量に対するスロットル開度の値が通常走行用テーブルに比べて小さい値となるように設定されている。このように、渋滞走行時には、内燃機関の出力特性を通常走行時よりも低下させることで、渋滞走行時の運転性及び燃費を向上させていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−233110号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常走行時であれば、例えば走行している道路の制限速度が40[km/h]から60[km/h]に変化すれば、ドライバは車速を60[km/h]程度まで増加させるのが普通である。しかしながら、ドライバの運転技量が未熟な場合、車速を調整するときに微妙なアクセル操作が実施できずにアクセルペダルを踏み込み過ぎて、制限速度を超過させてしまうことがある。そうすると、制限速度超過後にアクセルペダルを戻して車速を低下させることになり、結果として無駄な加速が行われたことになるので燃費が悪化する。
【0005】
したがって、前述した従来の車両の制御装置のように、渋滞走行時のみ内燃機関の出力特性を低下させるように制御していたのでは、ドライバの運転技量によっては燃費が悪化しやすいという問題点があった。
【0006】
本発明はこのような問題点に着目してなされたものであり、走行シーンや車両の運転状態に応じて内燃機関の出力特性を適切に制御することで、ドライバの運転技量の差による燃費の悪化を抑制することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、車両に搭載された内燃機関の出力特性を制御する出力特性制御装置である。そして、この内燃機関の出力特性制御装置が、自車が走行している道路交通環境を検出する道路交通環境検出手段と、検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段と、推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する内燃機関の出力が低下するように、内燃機関の目標出力特性を設定する目標出力特性設定手段と、内燃機関の出力特性を目標出力特性へと変更する出力特性変更手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、自車が走行している道路交通環境に基づいて、自車を快適かつ燃費良く走行させることができる推奨車速を算出する。そして、自車速がその推奨車速に収束しやすくなるように、自車速が推奨車速に近づくにつれて内燃機関の出力が低下するように内燃機関の出力特性を制御することとした。これにより、自車速が推奨車速に近づくにつれて、内燃機関の出力特性が徐々に加速しにくい出力特性となるので、ドライバが必要以上にアクセルペダルを踏み込んだ場合であっても、車両が必要以上に加速するのを抑制できる。これにより、ドライバの運転技量に関係なく、燃費を向上させることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1実施形態による火花点火式内燃機関の出力特性制御装置の概略構成図である。
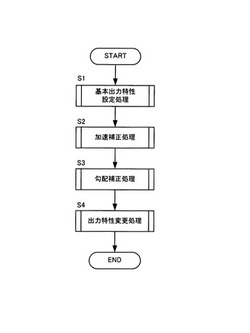
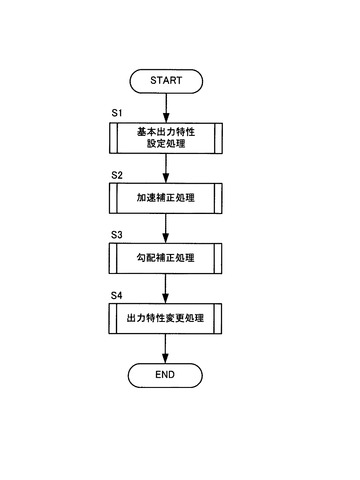
【図2】本発明の第1実施形態によるエンジンの出力特性制御について説明するフローチャートである。
【図3】本発明の第1実施形態による基本出力特性設定処理について説明するフローチャートである。
【図4】車速差と実車速とに基づいて推奨加速度を算出するマップである。
【図5】実車速に基づいて良燃費加速度を算出するテーブルである。
【図6】基本出力特性テーブルについて説明する図である。
【図7】本発明の第1実施形態による加速補正処理について説明するフローチャートである。
【図8】本発明の第1実施形態による勾配補正処理について説明するフローチャートである。
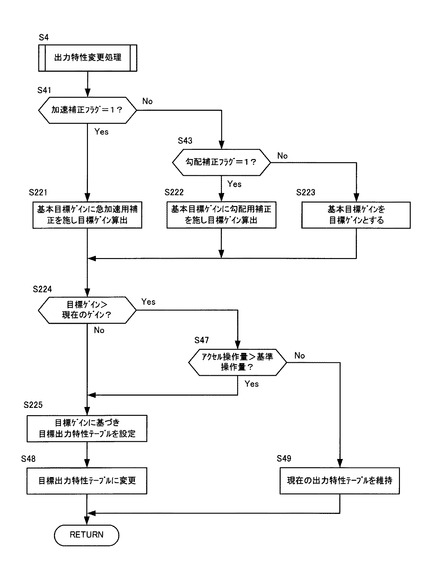
【図9】本発明の第1実施形態による出力特性変更処理について説明するフローチャートである。
【図10】本発明の第1実施形態による出力特性制御の動作について説明するタイムチャートである。
【図11】本発明の第1実施形態による出力特性制御の動作について説明するタイムチャートである。
【図12】本発明の第2実施形態による基本出力特性設定処理について説明するフローチャートである。
【図13】車速差と実車速とに基づいて推奨加速ゲインを算出するマップである。
【図14】実車速に基づいて良燃費加速ゲインを算出するテーブルである。
【図15】実車速に基づいて車速維持ゲインを算出するテーブルである。
【図16】本発明の第2実施形態による勾配補正処理について説明するフローチャートである。
【図17】本発明の第2実施形態による出力特性変更処理について説明するフローチャートである。
【図18】本発明の第2実施形態による目標出力特性テーブルの設定方法について説明する図である。
【図19】本発明の第3実施形態による勾配補正処理について説明するフローチャートである。
【図20】本発明の第3実施形態による下り勾配用出力特性テーブルについて説明する図である。
【図21】本発明の第3実施形態による出力特性変更処理について説明するフローチャートである。
【図22】本発明の第3実施形態による出力特性制御の動作について説明するタイムチャートである。
【図23】本発明の第4実施形態による下り勾配用出力特性テーブルについて説明する図である。
【図24】本発明の第4実施形態による出力特性制御の動作について説明するタイムチャートである。
【図25】本発明の第5実施形態による基本出力特性設定処理について説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の一実施形態について説明する。
【0011】
(第1実施形態)
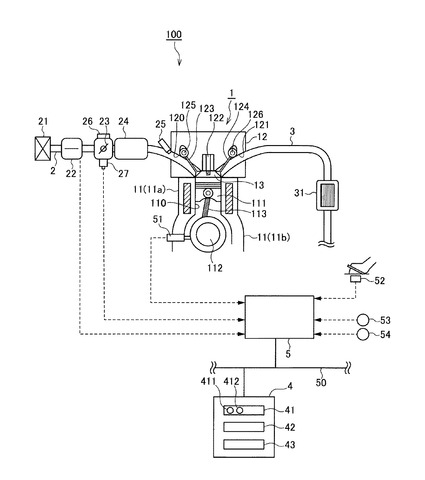
図1は、本発明の一実施形態による火花点火式内燃機関(以下「エンジン」という。)1の出力特性制御装置100の概略構成図である。
【0012】
エンジン1の出力特性制御装置100は、車両の駆動力を発生するエンジン1と、エンジン1に吸入される空気(以下「吸気」という。)が流れる吸気通路2と、エンジン1から排出される燃焼ガス(以下「排気」という。)が流れる排気通路3と、ナビゲーション装置4と、コントローラ5と、を備える。
【0013】
エンジン1は、シリンダブロック11と、シリンダヘッド12と、を備える。
【0014】
シリンダブロック11は、シリンダ部11aとクランクケース部11bとを備える。
【0015】
シリンダ部11aには、複数のシリンダ110が形成される。シリンダ110の内部には、燃焼圧力を受けてシリンダ110の内部を往復運動するピストン111が収められる。
【0016】
クランクケース部11bは、シリンダ部11aの下方に形成される。クランクケース部11bは、クランクシャフト112を回転自在に支持する。クランクシャフト112は、ピストン111の往復運動をコンロッド113を介して回転運動に変換する。
【0017】
シリンダヘッド12は、シリンダブロック11の上面に取り付けられ、シリンダ110及びピストン111とともに燃焼室13の一部を形成する。
【0018】
シリンダヘッド12には、吸気通路2に接続され燃焼室13の頂壁に開口する吸気ポート120と、排気通路3に接続され燃焼室13の頂壁に開口する排気ポート121と、が形成され、燃焼室13の頂壁中央に臨むように点火栓122が設けられる。また、シリンダヘッド12には、燃焼室13と吸気ポート120との開口を開閉する吸気弁123と、燃焼室13と排気ポート121との開口を開閉する排気弁124と、が設けられる。さらに、シリンダヘッド12には、吸気弁123を開閉駆動する吸気カムシャフト125と、排気弁124を開閉駆動する排気カムシャフト126とが設けられる。
【0019】
吸気通路2には、上流から順に、エアクリーナ21と、エアフローメータ22と、電子制御式のスロットル弁23と、吸気コレクタ24と、燃料噴射弁25と、が設けられる。
【0020】
エアクリーナ21は、吸気中に含まれる砂などの異物を除去する。
【0021】
エアフローメータ22は、吸気の流量(以下「吸気量」という。)を検出する。
【0022】
スロットル弁23は、吸気通路の通路段面積を連続的又は段階的に変化させることで、吸気コレクタ24に流入する吸気量を調整する。スロットル弁23は、スロットルアクチュエータ26によって開閉駆動される。スロットル開度は、スロットルセンサ27によって検出される。
【0023】
吸気コレクタ24は、流入してきた空気を各シリンダ110に均等に分配する。
【0024】
燃料噴射弁25は、エンジン1の運転状態に応じて吸気ポート120に向けて燃料を噴射する。
【0025】
排気通路3には、排気中の炭化水素や窒素酸化物などの有害物質を取り除く三元触媒31が設けられる。
【0026】
ナビゲーション装置4は、自車位置検出部41と、記憶部42と、通信部43と、を備える。
【0027】
自車位置検出部41は、GPS(Global Positioning System)センサ411によってGPS衛星からの電波を受信し、自車位置を検出する。また、3Dジャイロセンサ412の検出値に基づいて、自車の進行方向及び高度を算出する。
【0028】
記憶部42は、道路や道路上の施設などの地図情報を記憶する。より具体的には、道路の幅員や車線数、勾配、制限速度、信号及び踏み切りの有無、カーブの曲率半径、交差点、有料道路の料金所などの情報を記憶する。
【0029】
通信部43は、受信機によって道路交通情報通信システムセンタから送信される道路渋滞情報を受信する。
【0030】
以下では、ナビゲーション装置4によって取得される自車位置や地図情報、道路渋滞情報などの情報のことをまとめてナビゲーション情報という。
【0031】
コントローラ5は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。ナビゲーション装置4とコントローラ5とは、CAN(Controller Area Network)通信線50に接続されており、CAN通信によって互いにデータを送受信できるようになっている。
【0032】
コントローラ5には、前述したスロットルセンサ27やナビゲーション装置4からの信号のほかにも、クランク角に基づいてエンジン回転速度を検出するエンジン回転速度センサ51、アクセル操作量を検出するアクセルストロークセンサ52、自車の車速(自車速)を検出する車速センサ53、自車の前方にミリ波を放射し、先行車両から反射されたミリ波を受信することで自車と先行車両との車間距離を検出する車間距離センサ54などの各種センサからの信号が入力される。
【0033】
コントローラ5は、これらの信号に基づいて、エンジン1の出力特性を適宜変更する。具体的には、アクセル操作量に対するスロットル開度の値を適宜変更する。以下、この本実施形態によるエンジン1の出力特性制御について説明する。
【0034】
図2は、本実施形態によるエンジン1の出力特性制御について説明するフローチャートである。コントローラ5は、このルーチンを所定の演算周期(例えば10[ms])で実施する。
【0035】
ステップS1において、コントローラ5は、エンジン1の出力特性を、後述する推奨車速で走行しやすい特性(以下「基本出力特性」という。)に設定するための基本出力特性設定処理を実施する。基本出力特性設定処理の詳細については、図3から図6を参照して後述する。
【0036】
ステップS2において、コントローラ5は、加速補正処理を実施する。加速補正処理は、エンジン1の出力特性を、強い加速意図を持ってアクセルペダルが踏み込まれたとき、例えば発進時や急加速時に適した特性に補正するための処理である。加速補正処理の詳細については、図7を参照して後述する。
【0037】
ステップS3において、コントローラ5は、勾配補正処理を実施する。勾配補正処理は、エンジン1の出力特性を、自車が現在走行している道路の勾配に適した特性に補正するための処理である。勾配補正処理の詳細については、図8を参照して後述する。
【0038】
ステップS4において、コントローラ5は、出力特性変更処理を実施する。出力特性変更処理は、ステップS1からステップS3までの各処理の結果に基づいて目標出力特性を設定し、エンジン1の出力特性をその目標出力特性へと変更する処理である。出力特性変更処理の詳細については、図9を参照して後述する。
【0039】
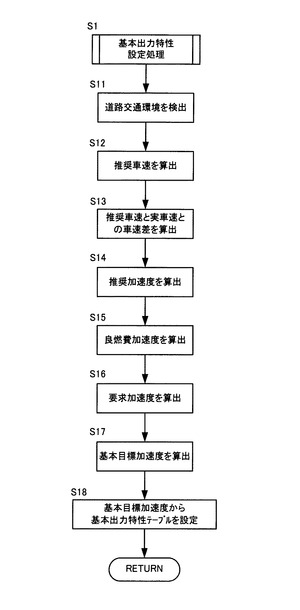
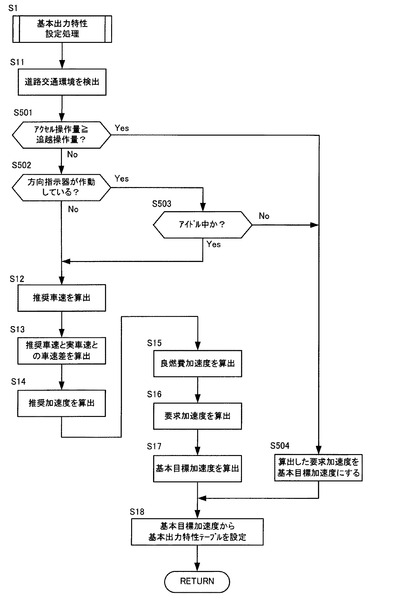
図3は、基本出力特性設定処理について説明するフローチャートである。
【0040】
ステップS11において、コントローラ5は、現在走行している道路の形状や制限速度、周辺車両との相対関係、渋滞度合い、信号の有無、などの自車が走行している道路の環境(以下「道路交通環境」という。)を、ナビゲーション情報及び車間距離に基づいて検出する。
【0041】
ステップS12において、コントローラ5は、道路交通環境に基づいて、自車を快適かつ燃費良く走行させることが可能な推奨車速を算出する。
【0042】
例えば、制限速度が40[km/h]の道路を走行しているときは、先行車両との車間距離が十分開いていてその道路が直線であれば、推奨車速は基本的に40[km/h]に設定される。またこのような状況で走行している場合に、制限速度が40[km/h]から60[km/h]に切り替わったときは、推奨車速が基本的に60[km/h]に設定される。
【0043】
一方で、先行車両との車間距離が詰まっているときは、車間距離に応じて推奨車速は制限速度よりも低い車速に適宜設定される。また、道路がカーブのときも、その曲率半径に応じて推奨車速が制限速度よりも低い車速に適宜設定される。また、前方に信号や交差点などがある場合や渋滞にはまった場合なども推奨車速が制限速度よりも低い車速に適宜設定される。このように、推奨車速は道路交通環境に応じて適宜設定される。
【0044】
本実施形態では、エンジン1の出力特性を、自車速がこの推奨車速に収束しやすくなるような特性に制御する。つまり、エンジン1の出力特性を、推奨車速で走行しやすい特性に制御する。
【0045】
ステップS13において、コントローラ5は、推奨車速と、自車速と、の車速差を算出する。
【0046】
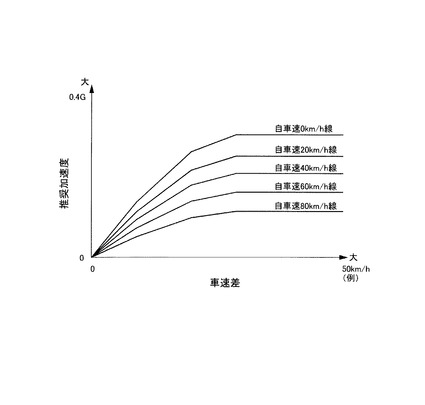
ステップS14において、コントローラ5は、予め実験等で定めた図4のマップを参照し、車速差と自車速とに基づいて、自車を推奨車速に向けて加速させるのに適した加速度(以下「推奨加速度」という。)を算出する。図4のマップに示すように、推奨加速度は、車速差が小さくなるほど、すなわち自車速が推奨車速に近づくほど小さくなる。また、推奨加速度は、自車速が大きいときよりも小さいときのほうが大きくなる。
【0047】
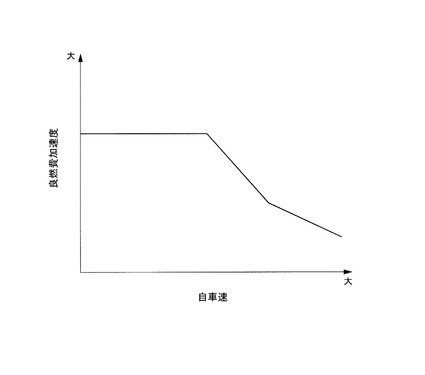
ステップS15において、コントローラ5は、予め実験等で定めた図5のテーブルを参照し、自車速に基づいて、自車を燃費良く加速させるのに適した加速度(以下「良燃費加速度」という。)を算出する。図5のテーブルに示すように、良燃費加速度は、自車速が所定車速に達するまでは一定で、所定車速を超えると徐々に小さくなる。
【0048】
ステップS16において、コントローラ5は、予め実験等で定めたマップ等を参照し、アクセル操作量と自車速とに基づいて、ドライバが要求する加速度(以下「要求加速度」という。)を算出する。
【0049】
ステップS17において、コントローラ5は、基本目標加速度を算出する。具体的には、推奨加速度と良燃費加速度との大小を比較して、小さいほうを暫定目標加速度とする。そして、暫定目標加速度と要求加速度との大小を比較して、大きいほうを基本目標加速度とする。
【0050】
ステップS18において、コントローラ5は、基本目標加速度に基づいて、複数ある出力特性テーブル(アクセル操作量とスロットル開度とを関連付けたテーブル)の中から最適なテーブルを、基本出力特性テーブルとして設定する。具体的には、基本目標加速度が大きいときほどアクセル操作量に対するスロットル開度の値が大きくなるように、基本目標加速度に基づいて基本出力特性テーブルを設定する。
【0051】
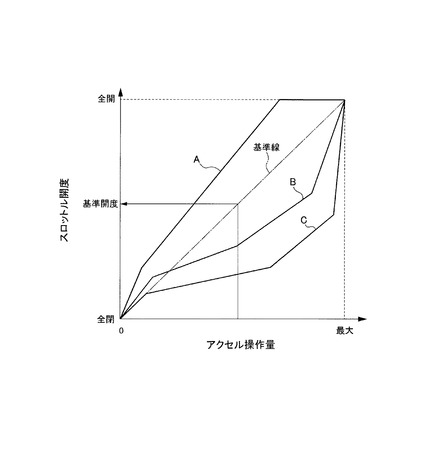
図6は、基本出力特性テーブルについて説明する図である。図6の一点鎖線は、アクセル操作量に対するスロットル開度が1対1となる基準線、すなわち、アクセル操作量がゼロであればスロットル開度もゼロ(全閉)となり、アクセル操作量が半分であればスロットル開度も半分となり、アクセル操作量が最大であればスロットル開度も最大(全開)となる線である。以下では、この基準線に従って算出されるスロットル開度を基準開度という。
【0052】
推奨車速と自車速との車速差が相対的に大きいときは、実線Aで示す通り、アクセル操作量に対するスロットル開度の値が基準開度よりも大きくなるように基本出力特性テーブルが設定される。これは、推奨車速と自車速との車速差が相対的に大きければ、推奨車速へと向かって強い加速力が求められることになると考えられるためである。
【0053】
そして、推奨車速と自車速との車速差が相対的に小さくなるにつれて、実線B又は実線Cで示す通り、アクセル操作量に対するスロットル開度が徐々に小さくなるように基本出力特性テーブルを設定する。
【0054】
なお、実線Bは、推奨車速と自車速との車速差が相対的に小さくなって、推奨加速へと向かって緩い加速力が求められるときに設定される基本出力特性テーブルの一例を示したものである。実線Cは、推奨車速と自車速との車速差が略ゼロとなったときに設定される基本出力特性テーブルの一例を示したものであり、推奨車速での一定速走行に適した出力特性となっている。
【0055】
このようにすることで、自車速が推奨車速に近づくにつれて徐々に加速力を低下させることができるので、自然に自車速を推奨車速へと収束させやすくすることができる。つまり、ドライバに対して微妙なアクセル操作を要求することなく自車速を推奨車速へと収束させやすくすることができるので、運転技量の差による燃費効果のバラつきを抑制することができる。
【0056】
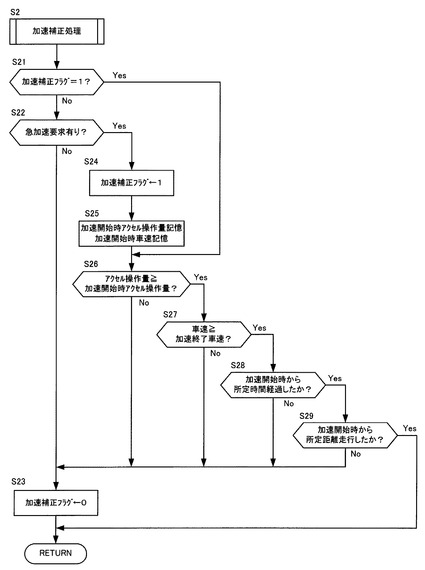
図7は、加速補正処理について説明するフローチャートである。
【0057】
ステップS21において、コントローラ5は、加速補正フラグが1であるか否かを判定する。加速補正フラグは、加速補正の実施時に1、非実施時に0にセットされるフラグであり、初期状態では0にセットされる。コントローラ5は、加速補正フラグが0であればステップS22の処理を行い、加速補正フラグが1であればステップS26の処理を行う。
【0058】
ステップS22において、コントローラ5は、強い加速意図を持ってアクセルペダルが踏み込まれているか、すなわち急加速要求があるか否かを判定して加速補正を実施するか否かを判定する。具体的には、単位時間当たりのアクセル操作量を表すアクセル操作速度が所定速度より大きいかを判定して加速開始意図を確認する。コントローラ5は、アクセル操作速度が所定速度以下であれば急加速要求無しと判定してステップS23の処理を行う。一方で、アクセル操作速度が所定速度よりも大きければ急加速要求有りと判定してステップS24の処理を行う。
【0059】
ステップS23において、コントローラ5は、加速補正フラグを0にセットする。
【0060】
ステップS24において、コントローラ5は、加速補正フラグを1にセットする。
【0061】
ステップS25において、コントローラ5は、現在のアクセル操作量、すなわち加速開始意図を確認したときのアクセル操作量(以下「加速開始時アクセル操作量」という。)を記憶する。同時に、現在の車速、すなわち加速開始意図を確認したときの車速(以下「加速開始時車速」という。)を記憶する。
【0062】
ステップS26からステップS29では、加速補正を終了するか否かを判定する。
【0063】
ステップS26において、コントローラ5は、現在のアクセル操作量が、加速開始時アクセル操作量以上か否かを判定する。コントローラ5は、現在のアクセル操作量が加速開始時アクセル操作量より小さければステップS23の処理を行う。一方で、現在のアクセル操作量が加速開始時アクセル操作量以上であればステップS27の処理を行う。
【0064】
ステップS27において、コントローラ5は、現在の車速が、加速開始時車速に所定車速(例えば50[km/h])を足した車速(以下「加速終了車速」という。)以上か否かを判定する。コントローラ5は、現在の車速が加速終了車速よりも小さければステップS28の処理を行う。一方で、現在の車速が加速終了車速以上であればステップS23の処理を行う。
【0065】
ステップS28において、コントローラ5は、加速開始意図を確認してから所定時間が経過したかを判定する。コントローラ5は、加速開始意図を確認してから所定時間が経過してればステップS23の処理を行い、そうでなければステップS29の処理を行う。
【0066】
ステップS29において、コントローラ5は、加速開始意図を確認してから所定距離を走行したかを判定する。コントローラ5は、加速開始意図を確認してから所定距離を走行していればステップS23の処理を行い、そうでなければ今回の処理を終了する。
【0067】
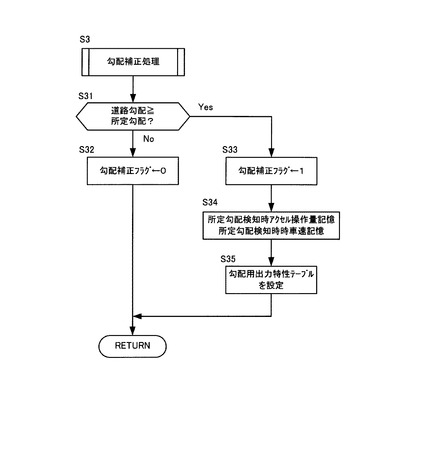
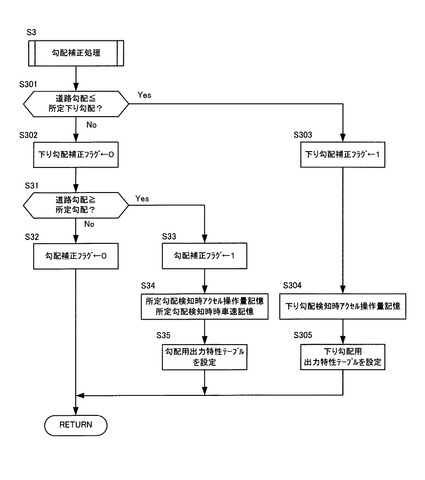
図8は、勾配補正処理について説明するフローチャートである。
【0068】
ステップS31において、コントローラ5は、現在走行している道路の勾配が所定勾配以上か否かを判定する。コントローラ5は、道路勾配が所定勾配未満であればステップS32の処理を行い、所定勾配以上であればステップS33の処理を行う。
【0069】
ステップS32において、コントローラ5は、勾配補正フラグを0にセットする。
【0070】
ステップS33において、コントローラ5は、勾配補正フラグを1にセットする。
【0071】
ステップS34において、コントローラ5は、現在のアクセル操作量、すなわち道路勾配が所定勾配以上になったときのアクセル操作量(以下「所定勾配検知時アクセル操作量」という。)を記憶する。同時に、現在の車速、すなわち道路勾配が所定勾配以上になったことを検知したときの車速(以下「所定勾配検知時車速」という。)を記憶する。
【0072】
ステップS35において、コントローラ5は、現在の道路勾配と所定勾配検知時車速とに基づいて、複数ある出力特性テーブルの中から最適なテーブルを、勾配用出力特性テーブルとして設定する。具体的には、道路勾配が大きいときほど、また、所定勾配検知時車速が小さいときほど、アクセル操作量に対するスロットル開度の値が大きくなるように、勾配用出力特性テーブルを設定する。勾配用出力特性テーブルは、図6でいえば実線Aから基準線の間に設定される。
【0073】
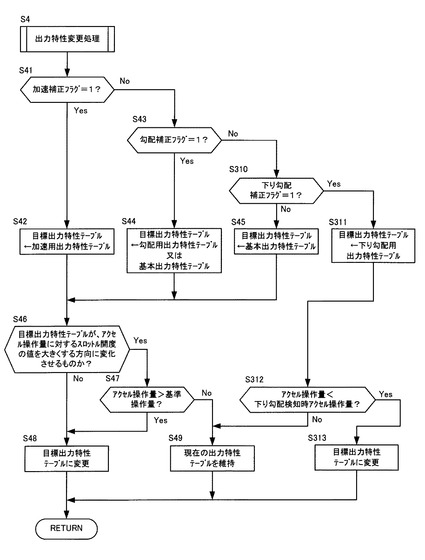
図9は、出力特性変更処理について説明するフローチャートである。
【0074】
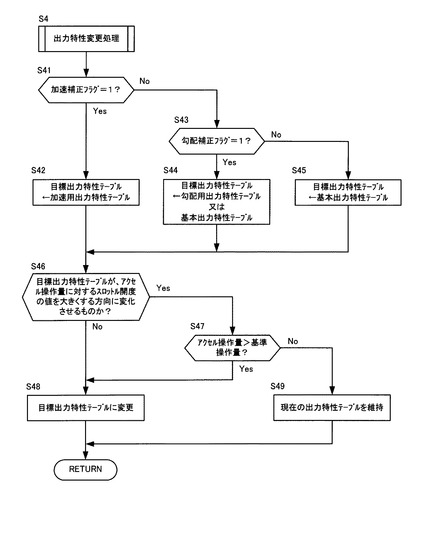
ステップS41において、コントローラ5は、加速補正フラグが1か否かを判定する。コントローラ5は、加速補正フラグが1であればステップS42の処理を行い、そうでなければステップS43の処理を行う。
【0075】
ステップS42において、コントローラ5は、目標出力特性テーブルとして、アクセル操作量に対するスロットル開度の値が最も大きくなるように設定された加速用出力特性テーブルを選択する。加速用出力特性テーブルは、図6でいえば実線Aに相当するテーブルである。
【0076】
ステップS43において、コントローラ5は、勾配補正フラグが1か否かを判定する。コントローラ5は、勾配補正フラグが1であればステップS44の処理を行い、そうでなければステップS45の処理を行う。
【0077】
ステップS44において、コントローラ5は、勾配用出力特性テーブルと、基本出力特性テーブルと、を比較して、アクセル操作量に対するスロットル開度の値がより大きくなるように設定されているテーブルを目標出力特性テーブルとして選択する。
【0078】
ステップS45において、コントローラ5は、基本出力特性テーブルを目標出力特性テーブルとして選択する。
【0079】
ステップS46及びステップS47では、出力特性テーブルを目標出力特性テーブルへと実際に変更させるか否かの判定を行う。
【0080】
ステップS46において、コントローラ5は、現在選択されている出力特性テーブルと、目標出力特性テーブルとを比較する。そして、目標出力特性テーブルが、現在選択されている出力特性テーブルよりも、アクセル操作量に対するスロットル開度の値をより大きくするように設定されたテーブルか否かを判定する。つまり、アクセル操作量が同じであれば、目標出力特性テーブルを参照して算出したスロットル開度のほうが、現在選択されている出力特性テーブルを参照して算出したスロットル開度よりも大きいかを否かを判定する。コントローラ5は、目標出力特性テーブルが、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値をより大きくするように設定されたテーブルであればステップS47の処理を行い、そうでなければステップS48の処理を行う。
【0081】
ステップS47において、コントローラ5は、アクセル操作量が基準操作量よりも増加しているかを判定する。このとき、目標出力特性テーブルとして加速用出力特性テーブルが選択されているときは、基準操作量として加速開始時アクセル操作量が設定される。目標出力特性テーブルとして勾配用出力特性テーブルが選択されているときは、基準操作量として所定勾配検知時アクセル操作量が設定される。目標出力特性テーブルとして基本出力特性テーブルが選択されているときは、基準操作量として基本出力特性テーブルを設定したときのアクセル操作量が設定される。
【0082】
ステップS46及びステップS47でこのような判定を実施するのは、アクセル操作量が一定に維持されている状態で、出力特性テーブルを、アクセル操作量に対するスロットル開度の値が現在よりも大きくなるテーブルに変更してしまうと、エンジン出力が急に大きくなってしまい、ドライバの意図に反して車両を加速させてしまうおそれがあるためである。
【0083】
ステップS48において、コントローラ5は、出力特性テーブルを現在選択されているものから目標出力特性テーブルへと変更する。
【0084】
ステップS49において、コントローラ5は、現在選択されている出力特性テーブルを維持し、目標出力特性テーブルへの変更を禁止する。
【0085】
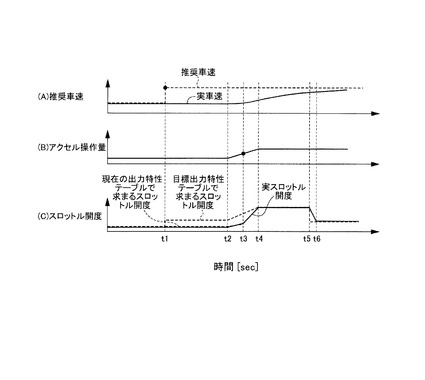
図10は、加速補正フラグ及び勾配補正フラグが0のときの出力特性制御の動作について説明するタイムチャートである。
【0086】
時刻t1で、推奨車速と自車速との車速差が大きくなり(図10(A))、基本目標加速度が相対的に大きくなると、現在選択されている出力特性テーブルよりもアクセル操作量に対するアクセル開度の値が大きいテーブルを基本出力特性テーブルとして設定する(S18)。そして、加速補正フラグ及び勾配補正フラグが0なので、この基本出力特性テーブルが目標出力特性テーブルとして選択される(図10(C);S41でNo、S43でNo、S45)。
【0087】
時刻t1から時刻t2までは、目標出力特性テーブルとして、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度が大きいテーブルが選択されている(図10(C))。また、アクセル操作量も一定に保持されている(図10(B))。そのため、現在選択されている出力特性テーブルを参照し、アクセル操作量に基づいてスロットル開度が決定される(図10(C);S46でYes、S47でNo、S49)。
【0088】
時刻t2でアクセルペダルが踏み込まれ(図10(B))、時刻t3でアクセル操作量が基準操作量(ここでは基本出力特性テーブルを設定したときのアクセル操作量、すなわち時刻t1におけるアクセル操作量)よりも大きくなったのを検知すると(図10(B))、出力特性テーブルを現在選択されている出力特性テーブルから目標出力特性テーブルへと変更する(図10(C);S46でYes、S47でYes、S48)。
【0089】
なお、現在選択されている出力特性テーブルから目標出力特性テーブルへと変更するときは、目標出力特性テーブルを参照して算出されたスロットル開度へと徐々にスロットル開度を変更する(図10(C);時刻t3〜時刻t4)。これにより、スロットル開度の急変に伴う運転性の悪化を防止することができる。
【0090】
このとき、加速補正フラグが1であれば、目標出力特性テーブルを参照して算出されたスロットル開度へ向けてスロットル開度を変更するまでの時間を、加速補正フラグが0のときと比べて短くしても良い。このように、ドライバに加速意図があるときにはアクセル操作に対するエンジン1の応答速度を上げることで、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制することができ、燃費を向上させることができる。
【0091】
時刻t5で、推奨車速と自車速との車速差が小さくなり(図10(A))、基本目標加速度が相対的に小さくなると、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値が小さいテーブルを基本出力特性テーブルとして設定する(S18)。そして、加速補正フラグ及び勾配補正フラグが0なので、この基本出力特性テーブルが目標出力特性テーブルとして選択される(図10(C);S41でNo、S43でNo、S45)。
【0092】
また、目標出力特性テーブルとして、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値が小さいテーブルが選択されているので、この時点(時刻t5)で現在選択されている出力特性テーブルから目標出力特性テーブルへと出力特性テーブルが変更される(図10(C);S46でNo、S48)。そして、目標出力特性テーブルを参照して算出されてスロットル開度へと徐々にスロットル開度を変更する(図10(C);時刻t5〜時刻t6)。
【0093】
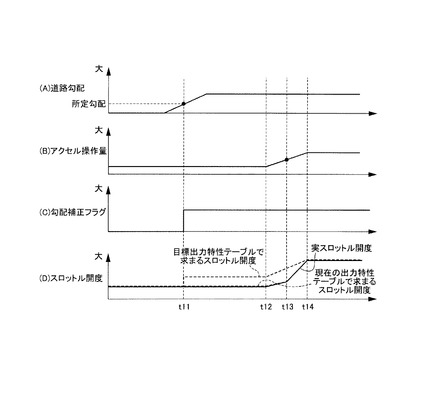
図11は、加速補正フラグが0のときの出力特性制御の動作について説明するタイムチャートである。なお、推奨車速の変化はないものとする。
【0094】
時刻t11で、実勾配が所定勾配よりも大きくなると(図11(A);S31でYes)、勾配補正フラグが1にセットされ(図11(C);S33)、実勾配と自車速とに基づいて勾配用出力特性テーブルが設定される(S35)。ここでは、推奨車速が変化しておらず、またアクセル操作量も一定なので、基本出力特性テーブルよりも勾配用出力特性テーブルのほうがアクセル操作量に対するスロットル開度が大きくなる。
【0095】
そして、加速補正フラグが0であり、基本出力特性テーブルよりも勾配用出力特性テーブルのほうがアクセル操作量に対するスロットル開度が大きいので、勾配用出力特性テーブルが目標出力特性テーブルとして設定される(S41でNo、S43でYes、S44)。
【0096】
時刻t12でアクセルペダルが踏み込まれ、時刻t13でアクセル操作量が基準操作量(ここでは所定勾配検知時アクセル操作量、すなわち時刻t11におけるアクセル操作量)よりも大きくなったのを検知すると(図10(B))、出力特性テーブルを、現在選択されている出力特性テーブルから目標出力特性テーブルへと変更する(図10(D);S46でYes、S47でYes、S48)。そして、目標出力特性テーブルを参照して算出されたスロットル開度へと徐々にスロットル開度を変更する(図10(D);時刻t13〜時刻t14)。
【0097】
以上説明した本実施形態によれば、ナビゲーション情報及び車間距離から判断される道路交通環境に基づいて、自車を快適かつ燃費良く走行させることができる推奨車速を算出する。そして、エンジン出力特性を、この推奨車速で走行しやすい特性に制御することとした。
【0098】
具体的には、走行中に推奨車速が切り替わり、推奨車速と自車速との車速差が相対的に大きくなったときは、アクセル操作量に対するスロットル開度を大きくして、加速しやすいエンジン出力特性とする。そして、推奨車速と自車速との車速差が小さくなるにつれて、つまり、自車速が推奨車速に近づくにつれて、アクセル操作量に対するスロットル開度が徐々に小さくなるようにして、加速しにくいエンジン出力特性へと変化させる。
【0099】
走行中に推奨車速が切り替われば、ドライバは基本的にその推奨車速へ向かって車速を調整すると考えられる。しかしながら、ドライバの運転技量が未熟な場合、推奨車速に車速を調整するときに、アクセルペダルを踏み込み過ぎて推奨車速を超過した後、アクセルペダルを戻して推奨車速に向けて車速を調整することがある。そうすると、無駄に加速が行われることになるので燃費が悪化する。
【0100】
このように、ドライバの運転技量によっては、推奨車速へ向かって車速を調整するときに、必要以上にアクセルペダルを踏み込んで車両を加速させてしまい、燃費を悪化させてしまうことが考えられる。そのため、ドライバの運転技量の差によって燃費にバラつきが生じてしまう。
【0101】
そこで本実施形態のように、自車速が推奨車速に近づくにつれてアクセル操作量に対するスロットル開度が徐々に小さくなるようにして、徐々に加速しにくいエンジン出力特性とすることで、ドライバが必要以上にアクセルペダルを踏み込んだ場合であっても、車両が必要以上に加速するのを抑制できる。これにより、ドライバの運転技量の差によって生じる燃費のバラつきを抑制することができ、ドライバの運転技量に関係なく燃費を向上させることができる。
【0102】
また、自車速が推奨車速に近づくにつれてアクセル操作量に対するスロットル開度が徐々に小さくなるようにすることで、アクセル操作量の変化に対するスロットル開度の変化を小さくすることができる(エンジン1の応答速度を下げる)。これにより、推奨車速近傍でラフなアクセル操作が行われた場合の車速の上下動を抑制することができる。そのため、道路交通環境に適した推奨車速での一定速走行が容易となるので、燃費を向上させることができる。
【0103】
また、推奨車速と自車速との車速差に応じてアクセル操作量に対するエンジン出力特性を変化させるので、推奨車速へ向かって車両を加速させるときのドライバによるアクセル操作を抑えることができる。つまり、推奨車速が切り替わったシーンにおいて、推奨車速へ向かって加速させるときのドライバによるアクセル操作量を減らし、推奨車速が切り替わる前のアクセル操作量と、推奨車速が切り替わった後のアクセル操作量と、の差を少なくすることができる。これにより、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制でき、燃費を向上させることができる。
【0104】
また本実施形態によれば、強い加速要求があったときは、出力特性を、アクセル操作量に対するスロットル開度が相対的に大きくなる加速用の出力特性に変化させることとした(エンジン1の応答速度を上げる)。これにより、ドライバの強い加速要求に対応することができるとともに、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制できる。よって、運転性を確保しつつ燃費を向上させることができる。
【0105】
そして、強い加速要求があった後、所定の条件(加速を開始してから所定車速増加したか、所定時間経過したか、又は所定距離走行したか)が成立した後は、推奨車速と自車速との車速差に応じてエンジン出力特性を変化させることとした。これにより、無駄な加速を抑えて燃費を向上させることができる。
【0106】
また本実施形態によれば、実勾配に応じて出力特性を変化させることとした。具体的には、実勾配が大きくなるほど、アクセル操作量に対するスロットル開度が大きくなるようなスロットル特性となるようにした。
【0107】
ドライバの運転技量が未熟だと、実勾配の変化に応じて車速を調整するときに、上手く調整することができずにアクセルペダルを踏み込みすぎて、無駄に加速してしまうことが考えられる。
【0108】
そこで本実施形態のように、実勾配に応じてエンジン出力特性を変化させることで、ドライバがアクセルペダルを踏み増す量を少なくすることができるので、無駄な加速を抑えて燃費を向上させることができる。
【0109】
また本実施形態によれば、出力特性テーブルを、アクセル操作量に対するスロットル開度の値が現在よりも大きくなるテーブルに変更するときは、アクセル操作量が増加したのを検知してから変化させる。これにより、アクセル操作を行っていないにもかかわらずエンジン出力が増大するのを防止して、ドライバの意図に反して車両が加速するのを防止することができる。
【0110】
また、本実施形態によれば、出力特性テーブルを目標出力特性テーブルへと変更するときは、目標出力特性テーブルを参照して算出されてスロットル開度へと徐々にスロットル開度を変更させるようにした。これにより、スロットル開度の急変に伴う運転性の悪化を防止することができる。
【0111】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本発明の第2実施形態は、アクセル操作量に対するスロットル開度のゲインを算出し、そのゲインに基づきエンジン出力特性を変更する点で第1実施形態と相違する。以下、その相違点を中心に説明する。なお、以下に示す各実施形態では前述した第1実施形態と同様の機能を果たす部分には、同一の符号を用いて重複する説明を適宜省略する。
【0112】
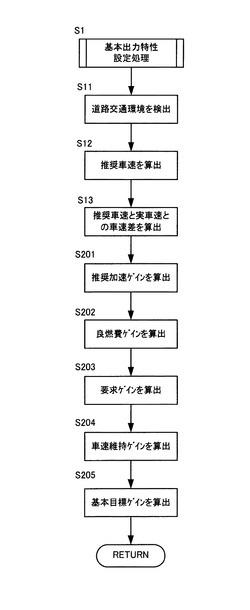
図12は、本実施形態による基本出力特性設定処理について説明するフローチャートである。
【0113】
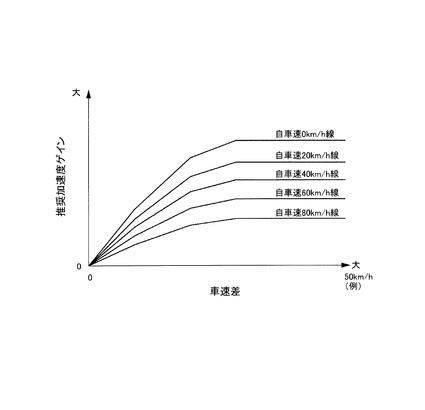
ステップS201において、コントローラ5は、予め実験等で定めた図13のマップを参照し、車速差と自車速とに基づいて、エンジン1の出力特性を推奨車速に向けて車両を加速させるのに適した特性にするゲイン(以下「推奨加速ゲイン」という。)を算出する。図13のマップに示すように、推奨加速ゲインは、車速差が小さくなるほど、すなわち自車速が推奨車速に近づくほど小さくなる。また、推奨加速ゲインは、自車速が大きいときよりも小さいときのほうが大きくなる。
【0114】
ステップS202において、コントローラ5は、予め実験等で定めた図14のテーブルを参照し、自車速に基づいて、エンジン1の出力特性を燃費良く車両を加速させるのに適した特性にするゲイン(以下「良燃費加速ゲイン」という。)を算出する。図14のテーブルに示すように、良燃費加速ゲインは、自車速が所定車速に達するまでは一定で、所定車速を超えると徐々に小さくなる。
【0115】
ステップS203において、コントローラ5は、予め実験等で定めたマップ等を参照し、アクセル操作量と自車速とに基づいて、エンジン1の出力特性をドライバが要求する加速度を発生させるに適した特性にするゲイン(以下「要求ゲイン」という。)を算出する。
【0116】
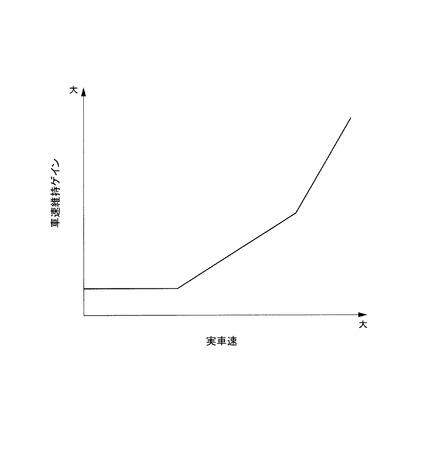
ステップS204において、コントローラ5は、予め実験等で定めた図15のテーブルを参照し、自車速に基づいて、エンジン1の出力特性を現在の車速を維持しやすい特性にするゲイン(以下「車速維持ゲイン」という。)を算出する。図15のテーブルに示すように、車速維持ゲインは、自車速が大きいときほど大きくなる。
【0117】
ステップS205において、コントローラ5は、基本目標ゲインを算出する。具体的には、推奨加速ゲインと良燃費加速ゲインとの大小を比較して、小さいほうを暫定目標ゲインとする。そして、暫定目標ゲイン、要求ゲイン及び車速維持ゲインのそれぞれの大きさを比較して、最も大きいものを基本目標ゲインとする。
【0118】
図16は、本実施形態による勾配補正処理について説明するフローチャートである。
【0119】
ステップS211において、コントローラ5は、現在の道路勾配と所定勾配検知時車速とに基づいて、勾配用補正ゲインを算出する。勾配用補正ゲインは、道路勾配が大きいときほど、また、所定勾配検知時車速が小さいときほど、大きくなるように設定される。
【0120】
図17は、本実施形態による出力特性変更処理について説明するフローチャートである。
【0121】
ステップS221において、コントローラ5は、基本目標ゲインに急加速用の補正を施して目標ゲインを算出する。具体的には、基本目標ゲインに対して、ゲインとして設定可能な最大値まで増加させる補正を施して目標ゲインとする。
【0122】
ステップS222において、コントローラ5は、基本目標ゲインに勾配用の補正を施して目標ゲインを算出する。具体的には、基本目標ゲインに勾配用補正ゲインを加算して目標ゲインとする。
【0123】
ステップS223において、コントローラ5は、基本目標ゲインを目標ゲインとする。
【0124】
ステップS224において、コントローラ5は、目標ゲインが現在のゲインより大きいか否かを判定する。コントローラ5は、目標ゲインが現在のゲインよりも大きければステップS48の処理を行い、そうでなければステップS225の処理を行う。
【0125】
ステップS225において、コントローラ5は、目標ゲインに基づいて目標出力特性テーブルを設定する。
【0126】
図18は、本実施形態による目標出力特性テーブルの設定方法について説明する図である。
【0127】
図18に示すように、実線Aが、目標ゲインが最大のときに設定される目標出力特性テーブルである。実線Bが目標ゲインが最小のときに設定される目標出力特性テーブルである。本実施形態では、設定された目標ゲインに基づき、実線Aと実線Bの間で目標出力特性テーブルが適宜設定される。
【0128】
以上説明した本実施形態によれば、前述した第1実施形態と同様の作用効果を得ることができる。
【0129】
(第3実施形態)
次に、本発明の第3実施形態について説明する。本発明の第3実施形態は、道路勾配が下り側に大きくなったときに、アクセル操作量に対するスロットル開度の値が小さくなるような出力特性テーブルを設定する点で第1実施形態と相違する。以下、その相違点を中心に説明する。
【0130】
第1実施形態の勾配補正処理では、道路勾配が所定勾配以上になったとき、すなわち自車が上り坂を走行しているときにのみ、エンジン1の出力特性を変化させていた。
【0131】
しかしながら、下り坂走行時には、特に車両が加速しやすい。そのため、自車が下り坂を走行しているときも、ドライバの運転技量が未熟だと、上手く車速を調整できずにアクセルペダルを踏み込み過ぎて、必要以上に車両を加速させてしまうことが考えられる。
【0132】
そこで本実施形態では、道路勾配が所定の下り勾配以下になったとき、すなわち自車が下り坂を走行しているときも、エンジン1の出力特性を変化させることにした。具体的には、道路勾配が所定の下り勾配以下になったときは、出力特性テーブルとして、下り坂の走行に適した下り勾配用出力特性テーブルを設定することにした。
【0133】
図19は、本実施形態による勾配補正処理について説明するフローチャートである。
【0134】
ステップS301において、コントローラ5は、自車が下り坂を走行しているか否かを判定する。具体的には、道路勾配が所定下り勾配以下か否かを判定する。なお、所定下り勾配は、負の値である。コントローラ5は、自車が下り坂を走行していないとき、すなわち道路勾配が所定勾配よりも大きいときは、ステップS302の処理を行う。一方で、自車が下り坂を走行しているとき、すなわち道路勾配が所定勾配以下のときは、ステップS303の処理を行う。
【0135】
ステップS302において、コントローラ5は、下り勾配補正フラグを0にセットする。下り勾配補正フラグは、下り坂走行時に1、下り坂非走行時に0にセットされるフラグであり、初期状態では0にセットされる。
【0136】
ステップS303において、コントローラ5は、下り勾配補正フラグを1にセットする。
【0137】
ステップS304において、コントローラ5は、現在のアクセル操作量、すなわち道路勾配が所定下り勾配以下になったときのアクセル操作量(以下「下り勾配検知時アクセル操作量」という。)を記憶する。
【0138】
ステップS305において、コントローラ5は、現在の道路勾配に基づいて、下り勾配用出力特性テーブルを設定する。
【0139】
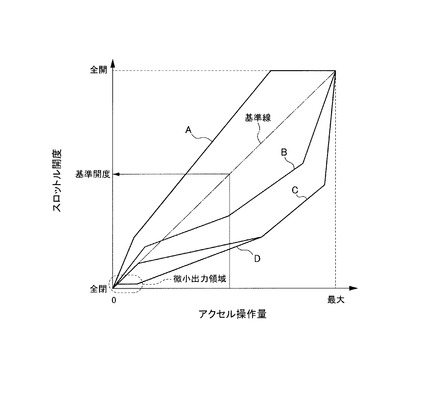
図20は、本実施形態による下り勾配用出力特性テーブルについて説明する図である。
【0140】
第1実施形態では、実線Cをアクセル操作量に対するスロットル開度が最も小さくなる出力特性テーブルとして設定し、実線Aから実線Cの間で適宜出力特性テーブルを変更してエンジン1の出力特性を変化させていた。
【0141】
これに対して本実施形態では、道路勾配が所定の下り勾配以下になったときは、実線Cで示す出力特性テーブルよりもさらにアクセル操作量に対するスロットル開度の値が小さくなる出力特性テーブルを、下り勾配用出力特性テーブルとして設定する。
【0142】
実線Dは、下り勾配用出力特性テーブルの一例を示したものである。道路勾配が所定の下り勾配以下になったときは、道路勾配に応じて実線Cから実線Dの間で下り勾配用出力特性テーブルが設定される。
【0143】
このように、自車が下り坂を走行しているときは、アクセル操作量に対するスロットル開度の値を小さくしてアクセルペダルを踏み込んでも加速しにくいエンジン出力特性とする。これにより、下り坂走行時において、車両が必要以上に加速するのを抑制することができる。
【0144】
また、ドライバの運転技量が未熟だと、下り坂走行時は特に車両が加速しやすいため、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけ加速したいときに、アクセルペダルを踏み込み過ぎて上手く車速を調整できないことがある。
【0145】
そこで本実施形態では、図19に破線で囲った部分で示すように、下り勾配用出力特性テーブルに、アクセル操作量が小さいときにエンジン1の出力を所定の微小出力に保持する微小出力領域を設けた。微小出力は、アイドル状態を解除できる程度の出力であって、アイドル状態を維持するために必要なエンジン出力よりも少し高い程度のエンジン出力である。
【0146】
これにより、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけアクセルペダルを踏み込んで加速したいときに、車速を容易に調整することができる。
【0147】
図21は、本実施形態による出力特性変更処理について説明するフローチャートである。
【0148】
ステップS310において、コントローラ5は、下り勾配フラグが1か否かを判定する。コントローラ5は、下り勾配フラグが0であればステップS45の処理を行う。一方で、下り勾配フラグが1であればステップS311の処理を行う。
【0149】
ステップS311において、コントローラ5は、下り勾配用出力特性テーブルを目標出力特性テーブルとして選択する。
【0150】
ステップS312において、コントローラ5は、アクセル操作量が下り勾配検知時アクセル操作量よりも小さくなったか否かを判定する。コントローラ5は、アクセル操作量が下り勾配検知時アクセル操作量よりも小さくなっていればステップS313の処理を行い、そうでなければステップS49の処理を行う。
【0151】
ステップS313において、コントローラ5は、出力特性テーブルを現在選択されているものから目標出力特性テーブルへと変更する。
【0152】
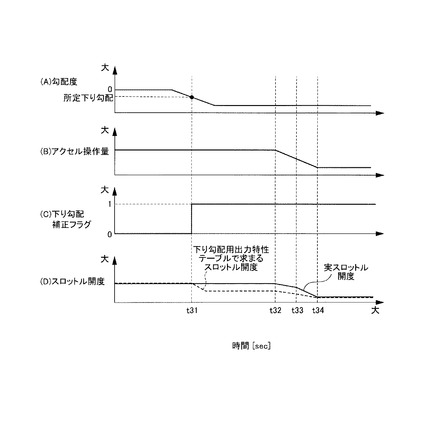
図22は、加速補正フラグ及び勾配補正フラグが0で、下り勾配補正フラグが1になったときの本実施形態による出力特性制御の動作について説明するタイムチャートである。
【0153】
時刻t31で、道路勾配が所定下り勾配以下になると(図22(A);S301でYes)、下り勾配補正フラグが1にセットされ(図22(C);S303)、道路勾配に応じて下り勾配用出力特性テーブルが設定される(S305)。
【0154】
そして、加速補正フラグ及び勾配補正フラグが0なので、下り勾配用出力特性テーブルが目標出力特性テーブルとして設定される(S310でYes、S311)。
【0155】
時刻t32でアクセルペダルが戻され、時刻t33でアクセル操作量が下り勾配検知時アクセル操作量(時刻t31におけるアクセル操作量)よりも小さくなったのを検知すると(図22(B);S312でYes)、出力特性テーブルを、現在選択されている出力特性テーブルから目標出力特性テーブルとして設定されている下り勾配用出力特性テーブルへと変更する(S313)。
【0156】
そして、時刻t33から時刻t34で、下り勾配用出力特性テーブルを参照して算出されるスロットル開度へと徐々にスロットル開度を変更する(図22(D))。
【0157】
以上説明した本実施形態によれば、道路勾配が所定下り勾配以下になったとき、すなわち自車が下り坂を走行しているときは、出力特性テーブルとして下り勾配用出力特性テーブルを選択し、アクセル操作量に対するスロットル開度の値を小さくする。
【0158】
これにより、アクセルペダルを踏み込んでも加速しにくい出力特性とすることができる。そのため、特に車両が加速しやすい下り坂走行時において、ドライバが必要以上にアクセルペダルを踏み込んだとしても、車両が必要以上に加速するのを抑制できる。
【0159】
また、本実施形態では、下り勾配用出力特性テーブルに、アクセル操作量が小さいときにエンジン出力を所定の微小出力に保持する微小出力領域を設けた。
【0160】
これにより、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけアクセルペダルを踏み込んで加速したいときに、アクセルペダルを踏み込みすぎたとしても車両の加速を抑制できる。そのため、車速を容易に調整することができる。
【0161】
(第4実施形態)
次に、本発明の第4実施形態について説明する。本発明の第4実施形態は、下り勾配用出力特性テーブルが第3実施形態と相違する。以下、その相違点を中心に説明する。なお、以下の説明において、変速比とは、変速機の入力軸の回転速度を出力軸の回転速度で割って得られる値をいう。
【0162】
下り坂をアクセルペダルを踏み込まずにエンジンブレーキを効かせてコースト走行している場合、変速機の変速比に応じて車両の加速度は変化する。具体的には、変速比が大きいほど車両の加速度は小さくなる。
【0163】
本実施形態では、道路勾配が所定下り勾配以下となり、かつ、アクセル操作量がゼロになったときは、道路勾配に応じて予め定められた加速度となるように、変速比を変化させている。具体的には、道路勾配が下り側に大きくなるほど変速比が大きくなるように変速機を制御し、車両が加速しすぎないようにしている。
【0164】
したがって、下り坂をコースト走行しているときは、変速比は相対的に大きくなっている。そのため、下り坂をコースト走行している状態から少しだけアクセルペダルを踏み込んで車両を加速させる場合には、エンジン出力を上げなくても変速比が小さくなるように変速機を制御してやれば所望の加速度を得ることができる。
【0165】
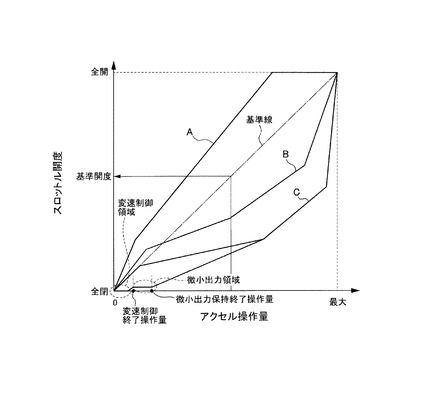
そこで本実施形態では、下り勾配用出力特性テーブルに、アクセルペダルが踏み込まれてもスロットル開度を全閉のまま維持し、変速比を小さくすることで車両を加速させる変速制御領域を設けた。
【0166】
図23は、本実施形態による下り勾配用出力特性テーブルについて説明する図である。
【0167】
図23に示すように、本実施形態による下り勾配用出力特性テーブルは、アクセル操作量が所定の変速制御終了操作量(第2操作量)になるまでは、スロットル開度を全閉のまま維持する変速制御領域を備える。また、アクセル操作量が変速制御終了操作量から所定の微小出力保持終了操作量(第1操作量)になるまでは、エンジン出力を所定の微小出力に保持する微小出力領域を備える。
【0168】
図24は、加速補正フラグ及び勾配補正フラグが0、下り勾配補正フラグが1のときの本実施形態による出力特性制御の動作について説明するタイムチャートである。なお、このタイムチャートでは、時刻t41の時点で、出力特性テーブルは既に下り勾配用出力特性テーブルに変更されているものとする。
【0169】
時刻t41から時刻t42の間は、下り坂をコースト走行している。そのため、加速度を抑えるために、変速比が道路勾配に応じた比較的大きい変速比に制御されている。
【0170】
時刻t42で、アクセルペダルが踏み込まれると、時刻t43でアクセル操作量が変速制御終了操作量を超えるまでは、スロットル開度を全閉にしたまま、変速比を小さくすることで、車両を加速させる。すなわち、スロットル開度を全閉にしたまま、変速比を道路勾配に応じた比較的大きい設定から平坦路走行時の設定に戻してやることで変速比を低下させて車両を加速させる。そして、時刻t43でアクセル操作量が変速制御終了操作量を超えると、エンジン出力が微小出力となるように、スロットル開度が開かれる。
【0171】
このように、本実施形態では、アクセル操作量が変速制御終了操作量を超えるまでは、スロットル開度を全閉にしたまま変速比を低下させることで車両を加速させる。つまり、アクセル操作量が変速制御終了操作量を超えるまでは、エンジン出力をゼロのままにしてコースト走行を持続し、変速比を低下させることで車両を加速させる。これにより、アクセル操作量が変速制御終了操作量を超えるまでは、コースト走行を持続させることができるので、燃料カット状態を維持することができる。したがって、本実施形態によれば、第3実施形態と同様の効果が得られるほか、より燃費を向上させることができる。
【0172】
(第5実施形態)
次に、本発明の第5実施形態について説明する。本発明の第5実施形態は、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定する点で第1実施形態と相違する。以下、その相違点を中心に説明する。
【0173】
第1実施形態では、先行車両との車間距離が詰まってくると、車間距離に応じて推奨車速を制限車速よりも低い車速となるように設定し、エンジン1の出力特性を、アクセルペダルを踏み込んでも加速しにくい出力特性となるように制御していた。
【0174】
しかしながら、走行シーンによっては、先行車両を追い越すために、加速しつつ先行車両との車間距離を詰めていきたい場合がある。このような場合に、エンジン1の出力特性を、先行車両との車間距離が詰まるにつれて加速しにくい出力特性にしてしまうと、運転性能が悪化する。
【0175】
第1実施形態では、アクセル操作速度が所定速度よりも大きくなったときに急加速要求有りと判断し、このような場合にも対応できるようにしていた。しかし、必ずしもこのような場合にアクセル操作速度が所定速度よりも大きくなるとは限らず、先行車両を追い越したい又は先行車両との車間距離を詰めたいというドライバの意思を十分に反映できないおそれがある。
【0176】
そこで本実施形態では、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定することにした。
【0177】
図25は、本実施形態による基本出力特性設定処理について説明するフローチャートである。
【0178】
ステップS501において、コントローラ5は、アクセル操作量が追越操作量以上か否かを判定する。コントローラ5は、アクセル操作量が追越操作量以上であれば、ステップS503の処理を行う。一方で、アクセル操作量が追越操作量より小さければ、ステップS502の処理を行う。
【0179】
ステップS502において、コントローラ5は、方向指示器が作動しているか否かを判定する。コントローラ5は、方向指示器が作動してればステップS503の処理を行う。一方で、方向指示器が作動していなければステップS12の処理を行う。
【0180】
ステップS503において、コントローラ5は、アイドル中か否かを判定する。具体的には、アイドルスイッチがオンになっているか否かを判定する。なお、アイドルスイッチは、アクセル操作量がゼロのときにオンになり、アクセルペダルが踏み込まれるとオフになるスイッチである。コントローラ54は、アイドル中であればステップS12に処理を移行する。一方で、アイドル中でなければステップS504に処理を移行する。
【0181】
ステップS504において、コントローラ5は、ステップS16と同様の方法で要求加速度を算出し、算出した要求加速度を基本目標加速度とする。
【0182】
以上説明した本実施形態によれば、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定することにした。
【0183】
これにより、先行車両を追い越すときや、先行車両との車間距離を詰めたいときなどに、ドライバの要求通りの加速度を得ることができるので、運転性能の悪化を抑制することができる。
【0184】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0185】
上記実施形態では、エンジン1の出力特性を変化させるためにアクセル操作量に対するスロットル開度の値を変化させていたが、これに限られるものではない。例えば、燃料噴射量を変化させてエンジン1の出力特性を変化させても良い。また、吸気弁のリフト・作動角を連続的に変更可能な可変動弁装置を備える場合には、その可変動弁装置によって吸気弁のリフト量を制御することでエンジン1の出力特性を変化させても良い。
【0186】
また、道路勾配をナビゲーション装置4によって検出することとしたが、車両の前後加速度を検出する加速度センサの検出値に基づき算出しても良い。
【0187】
また、上記第3実施形態において、道路勾配が所定の下り勾配以下になったときに、下り坂に適したゲインを設定し、第2実施形態のように制御しても良い。
【符号の説明】
【0188】
1 火花点火式内燃機関(内燃機関)
S11 道路交通環境検出手段
S12 推奨車速算出手段
S18、S45 目標出力特性設定手段
S22 急加速判定手段
S42 急加速時補正手段
S35、S44 勾配補正手段
S46〜S48 出力特性変更手段
S504 要求加速度算出手段
S305 下り勾配補正手段
【技術分野】
【0001】
本発明は内燃機関の出力特性制御装置に関する。
【背景技術】
【0002】
特許文献1に記載の車両の制御装置は、アクセルペダルの踏み込み量(以下「アクセル操作量」という。)とスロットル弁の開度(以下「スロットル開度」という。)とを関連付けたテーブル(以下「出力特性テーブル」という。)を予め記憶しておき、この出力特性テーブルを参照してアクセル操作量に基づきスロットル開度を制御していた。そして、出力特性テーブルとして、通常走行用テーブルと渋滞走行用テーブルの2つを予め記憶しておき、走行シーンに応じて参照する出力特性テーブルを切り替えていた。渋滞走行用テーブルは、アクセル操作量に対するスロットル開度の値が通常走行用テーブルに比べて小さい値となるように設定されている。このように、渋滞走行時には、内燃機関の出力特性を通常走行時よりも低下させることで、渋滞走行時の運転性及び燃費を向上させていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−233110号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常走行時であれば、例えば走行している道路の制限速度が40[km/h]から60[km/h]に変化すれば、ドライバは車速を60[km/h]程度まで増加させるのが普通である。しかしながら、ドライバの運転技量が未熟な場合、車速を調整するときに微妙なアクセル操作が実施できずにアクセルペダルを踏み込み過ぎて、制限速度を超過させてしまうことがある。そうすると、制限速度超過後にアクセルペダルを戻して車速を低下させることになり、結果として無駄な加速が行われたことになるので燃費が悪化する。
【0005】
したがって、前述した従来の車両の制御装置のように、渋滞走行時のみ内燃機関の出力特性を低下させるように制御していたのでは、ドライバの運転技量によっては燃費が悪化しやすいという問題点があった。
【0006】
本発明はこのような問題点に着目してなされたものであり、走行シーンや車両の運転状態に応じて内燃機関の出力特性を適切に制御することで、ドライバの運転技量の差による燃費の悪化を抑制することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、車両に搭載された内燃機関の出力特性を制御する出力特性制御装置である。そして、この内燃機関の出力特性制御装置が、自車が走行している道路交通環境を検出する道路交通環境検出手段と、検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段と、推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する内燃機関の出力が低下するように、内燃機関の目標出力特性を設定する目標出力特性設定手段と、内燃機関の出力特性を目標出力特性へと変更する出力特性変更手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、自車が走行している道路交通環境に基づいて、自車を快適かつ燃費良く走行させることができる推奨車速を算出する。そして、自車速がその推奨車速に収束しやすくなるように、自車速が推奨車速に近づくにつれて内燃機関の出力が低下するように内燃機関の出力特性を制御することとした。これにより、自車速が推奨車速に近づくにつれて、内燃機関の出力特性が徐々に加速しにくい出力特性となるので、ドライバが必要以上にアクセルペダルを踏み込んだ場合であっても、車両が必要以上に加速するのを抑制できる。これにより、ドライバの運転技量に関係なく、燃費を向上させることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1実施形態による火花点火式内燃機関の出力特性制御装置の概略構成図である。
【図2】本発明の第1実施形態によるエンジンの出力特性制御について説明するフローチャートである。
【図3】本発明の第1実施形態による基本出力特性設定処理について説明するフローチャートである。
【図4】車速差と実車速とに基づいて推奨加速度を算出するマップである。
【図5】実車速に基づいて良燃費加速度を算出するテーブルである。
【図6】基本出力特性テーブルについて説明する図である。
【図7】本発明の第1実施形態による加速補正処理について説明するフローチャートである。
【図8】本発明の第1実施形態による勾配補正処理について説明するフローチャートである。
【図9】本発明の第1実施形態による出力特性変更処理について説明するフローチャートである。
【図10】本発明の第1実施形態による出力特性制御の動作について説明するタイムチャートである。
【図11】本発明の第1実施形態による出力特性制御の動作について説明するタイムチャートである。
【図12】本発明の第2実施形態による基本出力特性設定処理について説明するフローチャートである。
【図13】車速差と実車速とに基づいて推奨加速ゲインを算出するマップである。
【図14】実車速に基づいて良燃費加速ゲインを算出するテーブルである。
【図15】実車速に基づいて車速維持ゲインを算出するテーブルである。
【図16】本発明の第2実施形態による勾配補正処理について説明するフローチャートである。
【図17】本発明の第2実施形態による出力特性変更処理について説明するフローチャートである。
【図18】本発明の第2実施形態による目標出力特性テーブルの設定方法について説明する図である。
【図19】本発明の第3実施形態による勾配補正処理について説明するフローチャートである。
【図20】本発明の第3実施形態による下り勾配用出力特性テーブルについて説明する図である。
【図21】本発明の第3実施形態による出力特性変更処理について説明するフローチャートである。
【図22】本発明の第3実施形態による出力特性制御の動作について説明するタイムチャートである。
【図23】本発明の第4実施形態による下り勾配用出力特性テーブルについて説明する図である。
【図24】本発明の第4実施形態による出力特性制御の動作について説明するタイムチャートである。
【図25】本発明の第5実施形態による基本出力特性設定処理について説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の一実施形態について説明する。
【0011】
(第1実施形態)
図1は、本発明の一実施形態による火花点火式内燃機関(以下「エンジン」という。)1の出力特性制御装置100の概略構成図である。
【0012】
エンジン1の出力特性制御装置100は、車両の駆動力を発生するエンジン1と、エンジン1に吸入される空気(以下「吸気」という。)が流れる吸気通路2と、エンジン1から排出される燃焼ガス(以下「排気」という。)が流れる排気通路3と、ナビゲーション装置4と、コントローラ5と、を備える。
【0013】
エンジン1は、シリンダブロック11と、シリンダヘッド12と、を備える。
【0014】
シリンダブロック11は、シリンダ部11aとクランクケース部11bとを備える。
【0015】
シリンダ部11aには、複数のシリンダ110が形成される。シリンダ110の内部には、燃焼圧力を受けてシリンダ110の内部を往復運動するピストン111が収められる。
【0016】
クランクケース部11bは、シリンダ部11aの下方に形成される。クランクケース部11bは、クランクシャフト112を回転自在に支持する。クランクシャフト112は、ピストン111の往復運動をコンロッド113を介して回転運動に変換する。
【0017】
シリンダヘッド12は、シリンダブロック11の上面に取り付けられ、シリンダ110及びピストン111とともに燃焼室13の一部を形成する。
【0018】
シリンダヘッド12には、吸気通路2に接続され燃焼室13の頂壁に開口する吸気ポート120と、排気通路3に接続され燃焼室13の頂壁に開口する排気ポート121と、が形成され、燃焼室13の頂壁中央に臨むように点火栓122が設けられる。また、シリンダヘッド12には、燃焼室13と吸気ポート120との開口を開閉する吸気弁123と、燃焼室13と排気ポート121との開口を開閉する排気弁124と、が設けられる。さらに、シリンダヘッド12には、吸気弁123を開閉駆動する吸気カムシャフト125と、排気弁124を開閉駆動する排気カムシャフト126とが設けられる。
【0019】
吸気通路2には、上流から順に、エアクリーナ21と、エアフローメータ22と、電子制御式のスロットル弁23と、吸気コレクタ24と、燃料噴射弁25と、が設けられる。
【0020】
エアクリーナ21は、吸気中に含まれる砂などの異物を除去する。
【0021】
エアフローメータ22は、吸気の流量(以下「吸気量」という。)を検出する。
【0022】
スロットル弁23は、吸気通路の通路段面積を連続的又は段階的に変化させることで、吸気コレクタ24に流入する吸気量を調整する。スロットル弁23は、スロットルアクチュエータ26によって開閉駆動される。スロットル開度は、スロットルセンサ27によって検出される。
【0023】
吸気コレクタ24は、流入してきた空気を各シリンダ110に均等に分配する。
【0024】
燃料噴射弁25は、エンジン1の運転状態に応じて吸気ポート120に向けて燃料を噴射する。
【0025】
排気通路3には、排気中の炭化水素や窒素酸化物などの有害物質を取り除く三元触媒31が設けられる。
【0026】
ナビゲーション装置4は、自車位置検出部41と、記憶部42と、通信部43と、を備える。
【0027】
自車位置検出部41は、GPS(Global Positioning System)センサ411によってGPS衛星からの電波を受信し、自車位置を検出する。また、3Dジャイロセンサ412の検出値に基づいて、自車の進行方向及び高度を算出する。
【0028】
記憶部42は、道路や道路上の施設などの地図情報を記憶する。より具体的には、道路の幅員や車線数、勾配、制限速度、信号及び踏み切りの有無、カーブの曲率半径、交差点、有料道路の料金所などの情報を記憶する。
【0029】
通信部43は、受信機によって道路交通情報通信システムセンタから送信される道路渋滞情報を受信する。
【0030】
以下では、ナビゲーション装置4によって取得される自車位置や地図情報、道路渋滞情報などの情報のことをまとめてナビゲーション情報という。
【0031】
コントローラ5は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。ナビゲーション装置4とコントローラ5とは、CAN(Controller Area Network)通信線50に接続されており、CAN通信によって互いにデータを送受信できるようになっている。
【0032】
コントローラ5には、前述したスロットルセンサ27やナビゲーション装置4からの信号のほかにも、クランク角に基づいてエンジン回転速度を検出するエンジン回転速度センサ51、アクセル操作量を検出するアクセルストロークセンサ52、自車の車速(自車速)を検出する車速センサ53、自車の前方にミリ波を放射し、先行車両から反射されたミリ波を受信することで自車と先行車両との車間距離を検出する車間距離センサ54などの各種センサからの信号が入力される。
【0033】
コントローラ5は、これらの信号に基づいて、エンジン1の出力特性を適宜変更する。具体的には、アクセル操作量に対するスロットル開度の値を適宜変更する。以下、この本実施形態によるエンジン1の出力特性制御について説明する。
【0034】
図2は、本実施形態によるエンジン1の出力特性制御について説明するフローチャートである。コントローラ5は、このルーチンを所定の演算周期(例えば10[ms])で実施する。
【0035】
ステップS1において、コントローラ5は、エンジン1の出力特性を、後述する推奨車速で走行しやすい特性(以下「基本出力特性」という。)に設定するための基本出力特性設定処理を実施する。基本出力特性設定処理の詳細については、図3から図6を参照して後述する。
【0036】
ステップS2において、コントローラ5は、加速補正処理を実施する。加速補正処理は、エンジン1の出力特性を、強い加速意図を持ってアクセルペダルが踏み込まれたとき、例えば発進時や急加速時に適した特性に補正するための処理である。加速補正処理の詳細については、図7を参照して後述する。
【0037】
ステップS3において、コントローラ5は、勾配補正処理を実施する。勾配補正処理は、エンジン1の出力特性を、自車が現在走行している道路の勾配に適した特性に補正するための処理である。勾配補正処理の詳細については、図8を参照して後述する。
【0038】
ステップS4において、コントローラ5は、出力特性変更処理を実施する。出力特性変更処理は、ステップS1からステップS3までの各処理の結果に基づいて目標出力特性を設定し、エンジン1の出力特性をその目標出力特性へと変更する処理である。出力特性変更処理の詳細については、図9を参照して後述する。
【0039】
図3は、基本出力特性設定処理について説明するフローチャートである。
【0040】
ステップS11において、コントローラ5は、現在走行している道路の形状や制限速度、周辺車両との相対関係、渋滞度合い、信号の有無、などの自車が走行している道路の環境(以下「道路交通環境」という。)を、ナビゲーション情報及び車間距離に基づいて検出する。
【0041】
ステップS12において、コントローラ5は、道路交通環境に基づいて、自車を快適かつ燃費良く走行させることが可能な推奨車速を算出する。
【0042】
例えば、制限速度が40[km/h]の道路を走行しているときは、先行車両との車間距離が十分開いていてその道路が直線であれば、推奨車速は基本的に40[km/h]に設定される。またこのような状況で走行している場合に、制限速度が40[km/h]から60[km/h]に切り替わったときは、推奨車速が基本的に60[km/h]に設定される。
【0043】
一方で、先行車両との車間距離が詰まっているときは、車間距離に応じて推奨車速は制限速度よりも低い車速に適宜設定される。また、道路がカーブのときも、その曲率半径に応じて推奨車速が制限速度よりも低い車速に適宜設定される。また、前方に信号や交差点などがある場合や渋滞にはまった場合なども推奨車速が制限速度よりも低い車速に適宜設定される。このように、推奨車速は道路交通環境に応じて適宜設定される。
【0044】
本実施形態では、エンジン1の出力特性を、自車速がこの推奨車速に収束しやすくなるような特性に制御する。つまり、エンジン1の出力特性を、推奨車速で走行しやすい特性に制御する。
【0045】
ステップS13において、コントローラ5は、推奨車速と、自車速と、の車速差を算出する。
【0046】
ステップS14において、コントローラ5は、予め実験等で定めた図4のマップを参照し、車速差と自車速とに基づいて、自車を推奨車速に向けて加速させるのに適した加速度(以下「推奨加速度」という。)を算出する。図4のマップに示すように、推奨加速度は、車速差が小さくなるほど、すなわち自車速が推奨車速に近づくほど小さくなる。また、推奨加速度は、自車速が大きいときよりも小さいときのほうが大きくなる。
【0047】
ステップS15において、コントローラ5は、予め実験等で定めた図5のテーブルを参照し、自車速に基づいて、自車を燃費良く加速させるのに適した加速度(以下「良燃費加速度」という。)を算出する。図5のテーブルに示すように、良燃費加速度は、自車速が所定車速に達するまでは一定で、所定車速を超えると徐々に小さくなる。
【0048】
ステップS16において、コントローラ5は、予め実験等で定めたマップ等を参照し、アクセル操作量と自車速とに基づいて、ドライバが要求する加速度(以下「要求加速度」という。)を算出する。
【0049】
ステップS17において、コントローラ5は、基本目標加速度を算出する。具体的には、推奨加速度と良燃費加速度との大小を比較して、小さいほうを暫定目標加速度とする。そして、暫定目標加速度と要求加速度との大小を比較して、大きいほうを基本目標加速度とする。
【0050】
ステップS18において、コントローラ5は、基本目標加速度に基づいて、複数ある出力特性テーブル(アクセル操作量とスロットル開度とを関連付けたテーブル)の中から最適なテーブルを、基本出力特性テーブルとして設定する。具体的には、基本目標加速度が大きいときほどアクセル操作量に対するスロットル開度の値が大きくなるように、基本目標加速度に基づいて基本出力特性テーブルを設定する。
【0051】
図6は、基本出力特性テーブルについて説明する図である。図6の一点鎖線は、アクセル操作量に対するスロットル開度が1対1となる基準線、すなわち、アクセル操作量がゼロであればスロットル開度もゼロ(全閉)となり、アクセル操作量が半分であればスロットル開度も半分となり、アクセル操作量が最大であればスロットル開度も最大(全開)となる線である。以下では、この基準線に従って算出されるスロットル開度を基準開度という。
【0052】
推奨車速と自車速との車速差が相対的に大きいときは、実線Aで示す通り、アクセル操作量に対するスロットル開度の値が基準開度よりも大きくなるように基本出力特性テーブルが設定される。これは、推奨車速と自車速との車速差が相対的に大きければ、推奨車速へと向かって強い加速力が求められることになると考えられるためである。
【0053】
そして、推奨車速と自車速との車速差が相対的に小さくなるにつれて、実線B又は実線Cで示す通り、アクセル操作量に対するスロットル開度が徐々に小さくなるように基本出力特性テーブルを設定する。
【0054】
なお、実線Bは、推奨車速と自車速との車速差が相対的に小さくなって、推奨加速へと向かって緩い加速力が求められるときに設定される基本出力特性テーブルの一例を示したものである。実線Cは、推奨車速と自車速との車速差が略ゼロとなったときに設定される基本出力特性テーブルの一例を示したものであり、推奨車速での一定速走行に適した出力特性となっている。
【0055】
このようにすることで、自車速が推奨車速に近づくにつれて徐々に加速力を低下させることができるので、自然に自車速を推奨車速へと収束させやすくすることができる。つまり、ドライバに対して微妙なアクセル操作を要求することなく自車速を推奨車速へと収束させやすくすることができるので、運転技量の差による燃費効果のバラつきを抑制することができる。
【0056】
図7は、加速補正処理について説明するフローチャートである。
【0057】
ステップS21において、コントローラ5は、加速補正フラグが1であるか否かを判定する。加速補正フラグは、加速補正の実施時に1、非実施時に0にセットされるフラグであり、初期状態では0にセットされる。コントローラ5は、加速補正フラグが0であればステップS22の処理を行い、加速補正フラグが1であればステップS26の処理を行う。
【0058】
ステップS22において、コントローラ5は、強い加速意図を持ってアクセルペダルが踏み込まれているか、すなわち急加速要求があるか否かを判定して加速補正を実施するか否かを判定する。具体的には、単位時間当たりのアクセル操作量を表すアクセル操作速度が所定速度より大きいかを判定して加速開始意図を確認する。コントローラ5は、アクセル操作速度が所定速度以下であれば急加速要求無しと判定してステップS23の処理を行う。一方で、アクセル操作速度が所定速度よりも大きければ急加速要求有りと判定してステップS24の処理を行う。
【0059】
ステップS23において、コントローラ5は、加速補正フラグを0にセットする。
【0060】
ステップS24において、コントローラ5は、加速補正フラグを1にセットする。
【0061】
ステップS25において、コントローラ5は、現在のアクセル操作量、すなわち加速開始意図を確認したときのアクセル操作量(以下「加速開始時アクセル操作量」という。)を記憶する。同時に、現在の車速、すなわち加速開始意図を確認したときの車速(以下「加速開始時車速」という。)を記憶する。
【0062】
ステップS26からステップS29では、加速補正を終了するか否かを判定する。
【0063】
ステップS26において、コントローラ5は、現在のアクセル操作量が、加速開始時アクセル操作量以上か否かを判定する。コントローラ5は、現在のアクセル操作量が加速開始時アクセル操作量より小さければステップS23の処理を行う。一方で、現在のアクセル操作量が加速開始時アクセル操作量以上であればステップS27の処理を行う。
【0064】
ステップS27において、コントローラ5は、現在の車速が、加速開始時車速に所定車速(例えば50[km/h])を足した車速(以下「加速終了車速」という。)以上か否かを判定する。コントローラ5は、現在の車速が加速終了車速よりも小さければステップS28の処理を行う。一方で、現在の車速が加速終了車速以上であればステップS23の処理を行う。
【0065】
ステップS28において、コントローラ5は、加速開始意図を確認してから所定時間が経過したかを判定する。コントローラ5は、加速開始意図を確認してから所定時間が経過してればステップS23の処理を行い、そうでなければステップS29の処理を行う。
【0066】
ステップS29において、コントローラ5は、加速開始意図を確認してから所定距離を走行したかを判定する。コントローラ5は、加速開始意図を確認してから所定距離を走行していればステップS23の処理を行い、そうでなければ今回の処理を終了する。
【0067】
図8は、勾配補正処理について説明するフローチャートである。
【0068】
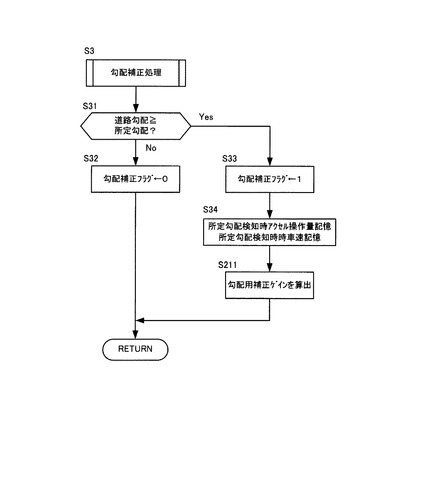
ステップS31において、コントローラ5は、現在走行している道路の勾配が所定勾配以上か否かを判定する。コントローラ5は、道路勾配が所定勾配未満であればステップS32の処理を行い、所定勾配以上であればステップS33の処理を行う。
【0069】
ステップS32において、コントローラ5は、勾配補正フラグを0にセットする。
【0070】
ステップS33において、コントローラ5は、勾配補正フラグを1にセットする。
【0071】
ステップS34において、コントローラ5は、現在のアクセル操作量、すなわち道路勾配が所定勾配以上になったときのアクセル操作量(以下「所定勾配検知時アクセル操作量」という。)を記憶する。同時に、現在の車速、すなわち道路勾配が所定勾配以上になったことを検知したときの車速(以下「所定勾配検知時車速」という。)を記憶する。
【0072】
ステップS35において、コントローラ5は、現在の道路勾配と所定勾配検知時車速とに基づいて、複数ある出力特性テーブルの中から最適なテーブルを、勾配用出力特性テーブルとして設定する。具体的には、道路勾配が大きいときほど、また、所定勾配検知時車速が小さいときほど、アクセル操作量に対するスロットル開度の値が大きくなるように、勾配用出力特性テーブルを設定する。勾配用出力特性テーブルは、図6でいえば実線Aから基準線の間に設定される。
【0073】
図9は、出力特性変更処理について説明するフローチャートである。
【0074】
ステップS41において、コントローラ5は、加速補正フラグが1か否かを判定する。コントローラ5は、加速補正フラグが1であればステップS42の処理を行い、そうでなければステップS43の処理を行う。
【0075】
ステップS42において、コントローラ5は、目標出力特性テーブルとして、アクセル操作量に対するスロットル開度の値が最も大きくなるように設定された加速用出力特性テーブルを選択する。加速用出力特性テーブルは、図6でいえば実線Aに相当するテーブルである。
【0076】
ステップS43において、コントローラ5は、勾配補正フラグが1か否かを判定する。コントローラ5は、勾配補正フラグが1であればステップS44の処理を行い、そうでなければステップS45の処理を行う。
【0077】
ステップS44において、コントローラ5は、勾配用出力特性テーブルと、基本出力特性テーブルと、を比較して、アクセル操作量に対するスロットル開度の値がより大きくなるように設定されているテーブルを目標出力特性テーブルとして選択する。
【0078】
ステップS45において、コントローラ5は、基本出力特性テーブルを目標出力特性テーブルとして選択する。
【0079】
ステップS46及びステップS47では、出力特性テーブルを目標出力特性テーブルへと実際に変更させるか否かの判定を行う。
【0080】
ステップS46において、コントローラ5は、現在選択されている出力特性テーブルと、目標出力特性テーブルとを比較する。そして、目標出力特性テーブルが、現在選択されている出力特性テーブルよりも、アクセル操作量に対するスロットル開度の値をより大きくするように設定されたテーブルか否かを判定する。つまり、アクセル操作量が同じであれば、目標出力特性テーブルを参照して算出したスロットル開度のほうが、現在選択されている出力特性テーブルを参照して算出したスロットル開度よりも大きいかを否かを判定する。コントローラ5は、目標出力特性テーブルが、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値をより大きくするように設定されたテーブルであればステップS47の処理を行い、そうでなければステップS48の処理を行う。
【0081】
ステップS47において、コントローラ5は、アクセル操作量が基準操作量よりも増加しているかを判定する。このとき、目標出力特性テーブルとして加速用出力特性テーブルが選択されているときは、基準操作量として加速開始時アクセル操作量が設定される。目標出力特性テーブルとして勾配用出力特性テーブルが選択されているときは、基準操作量として所定勾配検知時アクセル操作量が設定される。目標出力特性テーブルとして基本出力特性テーブルが選択されているときは、基準操作量として基本出力特性テーブルを設定したときのアクセル操作量が設定される。
【0082】
ステップS46及びステップS47でこのような判定を実施するのは、アクセル操作量が一定に維持されている状態で、出力特性テーブルを、アクセル操作量に対するスロットル開度の値が現在よりも大きくなるテーブルに変更してしまうと、エンジン出力が急に大きくなってしまい、ドライバの意図に反して車両を加速させてしまうおそれがあるためである。
【0083】
ステップS48において、コントローラ5は、出力特性テーブルを現在選択されているものから目標出力特性テーブルへと変更する。
【0084】
ステップS49において、コントローラ5は、現在選択されている出力特性テーブルを維持し、目標出力特性テーブルへの変更を禁止する。
【0085】
図10は、加速補正フラグ及び勾配補正フラグが0のときの出力特性制御の動作について説明するタイムチャートである。
【0086】
時刻t1で、推奨車速と自車速との車速差が大きくなり(図10(A))、基本目標加速度が相対的に大きくなると、現在選択されている出力特性テーブルよりもアクセル操作量に対するアクセル開度の値が大きいテーブルを基本出力特性テーブルとして設定する(S18)。そして、加速補正フラグ及び勾配補正フラグが0なので、この基本出力特性テーブルが目標出力特性テーブルとして選択される(図10(C);S41でNo、S43でNo、S45)。
【0087】
時刻t1から時刻t2までは、目標出力特性テーブルとして、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度が大きいテーブルが選択されている(図10(C))。また、アクセル操作量も一定に保持されている(図10(B))。そのため、現在選択されている出力特性テーブルを参照し、アクセル操作量に基づいてスロットル開度が決定される(図10(C);S46でYes、S47でNo、S49)。
【0088】
時刻t2でアクセルペダルが踏み込まれ(図10(B))、時刻t3でアクセル操作量が基準操作量(ここでは基本出力特性テーブルを設定したときのアクセル操作量、すなわち時刻t1におけるアクセル操作量)よりも大きくなったのを検知すると(図10(B))、出力特性テーブルを現在選択されている出力特性テーブルから目標出力特性テーブルへと変更する(図10(C);S46でYes、S47でYes、S48)。
【0089】
なお、現在選択されている出力特性テーブルから目標出力特性テーブルへと変更するときは、目標出力特性テーブルを参照して算出されたスロットル開度へと徐々にスロットル開度を変更する(図10(C);時刻t3〜時刻t4)。これにより、スロットル開度の急変に伴う運転性の悪化を防止することができる。
【0090】
このとき、加速補正フラグが1であれば、目標出力特性テーブルを参照して算出されたスロットル開度へ向けてスロットル開度を変更するまでの時間を、加速補正フラグが0のときと比べて短くしても良い。このように、ドライバに加速意図があるときにはアクセル操作に対するエンジン1の応答速度を上げることで、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制することができ、燃費を向上させることができる。
【0091】
時刻t5で、推奨車速と自車速との車速差が小さくなり(図10(A))、基本目標加速度が相対的に小さくなると、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値が小さいテーブルを基本出力特性テーブルとして設定する(S18)。そして、加速補正フラグ及び勾配補正フラグが0なので、この基本出力特性テーブルが目標出力特性テーブルとして選択される(図10(C);S41でNo、S43でNo、S45)。
【0092】
また、目標出力特性テーブルとして、現在選択されている出力特性テーブルよりもアクセル操作量に対するスロットル開度の値が小さいテーブルが選択されているので、この時点(時刻t5)で現在選択されている出力特性テーブルから目標出力特性テーブルへと出力特性テーブルが変更される(図10(C);S46でNo、S48)。そして、目標出力特性テーブルを参照して算出されてスロットル開度へと徐々にスロットル開度を変更する(図10(C);時刻t5〜時刻t6)。
【0093】
図11は、加速補正フラグが0のときの出力特性制御の動作について説明するタイムチャートである。なお、推奨車速の変化はないものとする。
【0094】
時刻t11で、実勾配が所定勾配よりも大きくなると(図11(A);S31でYes)、勾配補正フラグが1にセットされ(図11(C);S33)、実勾配と自車速とに基づいて勾配用出力特性テーブルが設定される(S35)。ここでは、推奨車速が変化しておらず、またアクセル操作量も一定なので、基本出力特性テーブルよりも勾配用出力特性テーブルのほうがアクセル操作量に対するスロットル開度が大きくなる。
【0095】
そして、加速補正フラグが0であり、基本出力特性テーブルよりも勾配用出力特性テーブルのほうがアクセル操作量に対するスロットル開度が大きいので、勾配用出力特性テーブルが目標出力特性テーブルとして設定される(S41でNo、S43でYes、S44)。
【0096】
時刻t12でアクセルペダルが踏み込まれ、時刻t13でアクセル操作量が基準操作量(ここでは所定勾配検知時アクセル操作量、すなわち時刻t11におけるアクセル操作量)よりも大きくなったのを検知すると(図10(B))、出力特性テーブルを、現在選択されている出力特性テーブルから目標出力特性テーブルへと変更する(図10(D);S46でYes、S47でYes、S48)。そして、目標出力特性テーブルを参照して算出されたスロットル開度へと徐々にスロットル開度を変更する(図10(D);時刻t13〜時刻t14)。
【0097】
以上説明した本実施形態によれば、ナビゲーション情報及び車間距離から判断される道路交通環境に基づいて、自車を快適かつ燃費良く走行させることができる推奨車速を算出する。そして、エンジン出力特性を、この推奨車速で走行しやすい特性に制御することとした。
【0098】
具体的には、走行中に推奨車速が切り替わり、推奨車速と自車速との車速差が相対的に大きくなったときは、アクセル操作量に対するスロットル開度を大きくして、加速しやすいエンジン出力特性とする。そして、推奨車速と自車速との車速差が小さくなるにつれて、つまり、自車速が推奨車速に近づくにつれて、アクセル操作量に対するスロットル開度が徐々に小さくなるようにして、加速しにくいエンジン出力特性へと変化させる。
【0099】
走行中に推奨車速が切り替われば、ドライバは基本的にその推奨車速へ向かって車速を調整すると考えられる。しかしながら、ドライバの運転技量が未熟な場合、推奨車速に車速を調整するときに、アクセルペダルを踏み込み過ぎて推奨車速を超過した後、アクセルペダルを戻して推奨車速に向けて車速を調整することがある。そうすると、無駄に加速が行われることになるので燃費が悪化する。
【0100】
このように、ドライバの運転技量によっては、推奨車速へ向かって車速を調整するときに、必要以上にアクセルペダルを踏み込んで車両を加速させてしまい、燃費を悪化させてしまうことが考えられる。そのため、ドライバの運転技量の差によって燃費にバラつきが生じてしまう。
【0101】
そこで本実施形態のように、自車速が推奨車速に近づくにつれてアクセル操作量に対するスロットル開度が徐々に小さくなるようにして、徐々に加速しにくいエンジン出力特性とすることで、ドライバが必要以上にアクセルペダルを踏み込んだ場合であっても、車両が必要以上に加速するのを抑制できる。これにより、ドライバの運転技量の差によって生じる燃費のバラつきを抑制することができ、ドライバの運転技量に関係なく燃費を向上させることができる。
【0102】
また、自車速が推奨車速に近づくにつれてアクセル操作量に対するスロットル開度が徐々に小さくなるようにすることで、アクセル操作量の変化に対するスロットル開度の変化を小さくすることができる(エンジン1の応答速度を下げる)。これにより、推奨車速近傍でラフなアクセル操作が行われた場合の車速の上下動を抑制することができる。そのため、道路交通環境に適した推奨車速での一定速走行が容易となるので、燃費を向上させることができる。
【0103】
また、推奨車速と自車速との車速差に応じてアクセル操作量に対するエンジン出力特性を変化させるので、推奨車速へ向かって車両を加速させるときのドライバによるアクセル操作を抑えることができる。つまり、推奨車速が切り替わったシーンにおいて、推奨車速へ向かって加速させるときのドライバによるアクセル操作量を減らし、推奨車速が切り替わる前のアクセル操作量と、推奨車速が切り替わった後のアクセル操作量と、の差を少なくすることができる。これにより、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制でき、燃費を向上させることができる。
【0104】
また本実施形態によれば、強い加速要求があったときは、出力特性を、アクセル操作量に対するスロットル開度が相対的に大きくなる加速用の出力特性に変化させることとした(エンジン1の応答速度を上げる)。これにより、ドライバの強い加速要求に対応することができるとともに、加速時にドライバがアクセルペダルを踏み込み過ぎるのを抑制できる。よって、運転性を確保しつつ燃費を向上させることができる。
【0105】
そして、強い加速要求があった後、所定の条件(加速を開始してから所定車速増加したか、所定時間経過したか、又は所定距離走行したか)が成立した後は、推奨車速と自車速との車速差に応じてエンジン出力特性を変化させることとした。これにより、無駄な加速を抑えて燃費を向上させることができる。
【0106】
また本実施形態によれば、実勾配に応じて出力特性を変化させることとした。具体的には、実勾配が大きくなるほど、アクセル操作量に対するスロットル開度が大きくなるようなスロットル特性となるようにした。
【0107】
ドライバの運転技量が未熟だと、実勾配の変化に応じて車速を調整するときに、上手く調整することができずにアクセルペダルを踏み込みすぎて、無駄に加速してしまうことが考えられる。
【0108】
そこで本実施形態のように、実勾配に応じてエンジン出力特性を変化させることで、ドライバがアクセルペダルを踏み増す量を少なくすることができるので、無駄な加速を抑えて燃費を向上させることができる。
【0109】
また本実施形態によれば、出力特性テーブルを、アクセル操作量に対するスロットル開度の値が現在よりも大きくなるテーブルに変更するときは、アクセル操作量が増加したのを検知してから変化させる。これにより、アクセル操作を行っていないにもかかわらずエンジン出力が増大するのを防止して、ドライバの意図に反して車両が加速するのを防止することができる。
【0110】
また、本実施形態によれば、出力特性テーブルを目標出力特性テーブルへと変更するときは、目標出力特性テーブルを参照して算出されてスロットル開度へと徐々にスロットル開度を変更させるようにした。これにより、スロットル開度の急変に伴う運転性の悪化を防止することができる。
【0111】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本発明の第2実施形態は、アクセル操作量に対するスロットル開度のゲインを算出し、そのゲインに基づきエンジン出力特性を変更する点で第1実施形態と相違する。以下、その相違点を中心に説明する。なお、以下に示す各実施形態では前述した第1実施形態と同様の機能を果たす部分には、同一の符号を用いて重複する説明を適宜省略する。
【0112】
図12は、本実施形態による基本出力特性設定処理について説明するフローチャートである。
【0113】
ステップS201において、コントローラ5は、予め実験等で定めた図13のマップを参照し、車速差と自車速とに基づいて、エンジン1の出力特性を推奨車速に向けて車両を加速させるのに適した特性にするゲイン(以下「推奨加速ゲイン」という。)を算出する。図13のマップに示すように、推奨加速ゲインは、車速差が小さくなるほど、すなわち自車速が推奨車速に近づくほど小さくなる。また、推奨加速ゲインは、自車速が大きいときよりも小さいときのほうが大きくなる。
【0114】
ステップS202において、コントローラ5は、予め実験等で定めた図14のテーブルを参照し、自車速に基づいて、エンジン1の出力特性を燃費良く車両を加速させるのに適した特性にするゲイン(以下「良燃費加速ゲイン」という。)を算出する。図14のテーブルに示すように、良燃費加速ゲインは、自車速が所定車速に達するまでは一定で、所定車速を超えると徐々に小さくなる。
【0115】
ステップS203において、コントローラ5は、予め実験等で定めたマップ等を参照し、アクセル操作量と自車速とに基づいて、エンジン1の出力特性をドライバが要求する加速度を発生させるに適した特性にするゲイン(以下「要求ゲイン」という。)を算出する。
【0116】
ステップS204において、コントローラ5は、予め実験等で定めた図15のテーブルを参照し、自車速に基づいて、エンジン1の出力特性を現在の車速を維持しやすい特性にするゲイン(以下「車速維持ゲイン」という。)を算出する。図15のテーブルに示すように、車速維持ゲインは、自車速が大きいときほど大きくなる。
【0117】
ステップS205において、コントローラ5は、基本目標ゲインを算出する。具体的には、推奨加速ゲインと良燃費加速ゲインとの大小を比較して、小さいほうを暫定目標ゲインとする。そして、暫定目標ゲイン、要求ゲイン及び車速維持ゲインのそれぞれの大きさを比較して、最も大きいものを基本目標ゲインとする。
【0118】
図16は、本実施形態による勾配補正処理について説明するフローチャートである。
【0119】
ステップS211において、コントローラ5は、現在の道路勾配と所定勾配検知時車速とに基づいて、勾配用補正ゲインを算出する。勾配用補正ゲインは、道路勾配が大きいときほど、また、所定勾配検知時車速が小さいときほど、大きくなるように設定される。
【0120】
図17は、本実施形態による出力特性変更処理について説明するフローチャートである。
【0121】
ステップS221において、コントローラ5は、基本目標ゲインに急加速用の補正を施して目標ゲインを算出する。具体的には、基本目標ゲインに対して、ゲインとして設定可能な最大値まで増加させる補正を施して目標ゲインとする。
【0122】
ステップS222において、コントローラ5は、基本目標ゲインに勾配用の補正を施して目標ゲインを算出する。具体的には、基本目標ゲインに勾配用補正ゲインを加算して目標ゲインとする。
【0123】
ステップS223において、コントローラ5は、基本目標ゲインを目標ゲインとする。
【0124】
ステップS224において、コントローラ5は、目標ゲインが現在のゲインより大きいか否かを判定する。コントローラ5は、目標ゲインが現在のゲインよりも大きければステップS48の処理を行い、そうでなければステップS225の処理を行う。
【0125】
ステップS225において、コントローラ5は、目標ゲインに基づいて目標出力特性テーブルを設定する。
【0126】
図18は、本実施形態による目標出力特性テーブルの設定方法について説明する図である。
【0127】
図18に示すように、実線Aが、目標ゲインが最大のときに設定される目標出力特性テーブルである。実線Bが目標ゲインが最小のときに設定される目標出力特性テーブルである。本実施形態では、設定された目標ゲインに基づき、実線Aと実線Bの間で目標出力特性テーブルが適宜設定される。
【0128】
以上説明した本実施形態によれば、前述した第1実施形態と同様の作用効果を得ることができる。
【0129】
(第3実施形態)
次に、本発明の第3実施形態について説明する。本発明の第3実施形態は、道路勾配が下り側に大きくなったときに、アクセル操作量に対するスロットル開度の値が小さくなるような出力特性テーブルを設定する点で第1実施形態と相違する。以下、その相違点を中心に説明する。
【0130】
第1実施形態の勾配補正処理では、道路勾配が所定勾配以上になったとき、すなわち自車が上り坂を走行しているときにのみ、エンジン1の出力特性を変化させていた。
【0131】
しかしながら、下り坂走行時には、特に車両が加速しやすい。そのため、自車が下り坂を走行しているときも、ドライバの運転技量が未熟だと、上手く車速を調整できずにアクセルペダルを踏み込み過ぎて、必要以上に車両を加速させてしまうことが考えられる。
【0132】
そこで本実施形態では、道路勾配が所定の下り勾配以下になったとき、すなわち自車が下り坂を走行しているときも、エンジン1の出力特性を変化させることにした。具体的には、道路勾配が所定の下り勾配以下になったときは、出力特性テーブルとして、下り坂の走行に適した下り勾配用出力特性テーブルを設定することにした。
【0133】
図19は、本実施形態による勾配補正処理について説明するフローチャートである。
【0134】
ステップS301において、コントローラ5は、自車が下り坂を走行しているか否かを判定する。具体的には、道路勾配が所定下り勾配以下か否かを判定する。なお、所定下り勾配は、負の値である。コントローラ5は、自車が下り坂を走行していないとき、すなわち道路勾配が所定勾配よりも大きいときは、ステップS302の処理を行う。一方で、自車が下り坂を走行しているとき、すなわち道路勾配が所定勾配以下のときは、ステップS303の処理を行う。
【0135】
ステップS302において、コントローラ5は、下り勾配補正フラグを0にセットする。下り勾配補正フラグは、下り坂走行時に1、下り坂非走行時に0にセットされるフラグであり、初期状態では0にセットされる。
【0136】
ステップS303において、コントローラ5は、下り勾配補正フラグを1にセットする。
【0137】
ステップS304において、コントローラ5は、現在のアクセル操作量、すなわち道路勾配が所定下り勾配以下になったときのアクセル操作量(以下「下り勾配検知時アクセル操作量」という。)を記憶する。
【0138】
ステップS305において、コントローラ5は、現在の道路勾配に基づいて、下り勾配用出力特性テーブルを設定する。
【0139】
図20は、本実施形態による下り勾配用出力特性テーブルについて説明する図である。
【0140】
第1実施形態では、実線Cをアクセル操作量に対するスロットル開度が最も小さくなる出力特性テーブルとして設定し、実線Aから実線Cの間で適宜出力特性テーブルを変更してエンジン1の出力特性を変化させていた。
【0141】
これに対して本実施形態では、道路勾配が所定の下り勾配以下になったときは、実線Cで示す出力特性テーブルよりもさらにアクセル操作量に対するスロットル開度の値が小さくなる出力特性テーブルを、下り勾配用出力特性テーブルとして設定する。
【0142】
実線Dは、下り勾配用出力特性テーブルの一例を示したものである。道路勾配が所定の下り勾配以下になったときは、道路勾配に応じて実線Cから実線Dの間で下り勾配用出力特性テーブルが設定される。
【0143】
このように、自車が下り坂を走行しているときは、アクセル操作量に対するスロットル開度の値を小さくしてアクセルペダルを踏み込んでも加速しにくいエンジン出力特性とする。これにより、下り坂走行時において、車両が必要以上に加速するのを抑制することができる。
【0144】
また、ドライバの運転技量が未熟だと、下り坂走行時は特に車両が加速しやすいため、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけ加速したいときに、アクセルペダルを踏み込み過ぎて上手く車速を調整できないことがある。
【0145】
そこで本実施形態では、図19に破線で囲った部分で示すように、下り勾配用出力特性テーブルに、アクセル操作量が小さいときにエンジン1の出力を所定の微小出力に保持する微小出力領域を設けた。微小出力は、アイドル状態を解除できる程度の出力であって、アイドル状態を維持するために必要なエンジン出力よりも少し高い程度のエンジン出力である。
【0146】
これにより、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけアクセルペダルを踏み込んで加速したいときに、車速を容易に調整することができる。
【0147】
図21は、本実施形態による出力特性変更処理について説明するフローチャートである。
【0148】
ステップS310において、コントローラ5は、下り勾配フラグが1か否かを判定する。コントローラ5は、下り勾配フラグが0であればステップS45の処理を行う。一方で、下り勾配フラグが1であればステップS311の処理を行う。
【0149】
ステップS311において、コントローラ5は、下り勾配用出力特性テーブルを目標出力特性テーブルとして選択する。
【0150】
ステップS312において、コントローラ5は、アクセル操作量が下り勾配検知時アクセル操作量よりも小さくなったか否かを判定する。コントローラ5は、アクセル操作量が下り勾配検知時アクセル操作量よりも小さくなっていればステップS313の処理を行い、そうでなければステップS49の処理を行う。
【0151】
ステップS313において、コントローラ5は、出力特性テーブルを現在選択されているものから目標出力特性テーブルへと変更する。
【0152】
図22は、加速補正フラグ及び勾配補正フラグが0で、下り勾配補正フラグが1になったときの本実施形態による出力特性制御の動作について説明するタイムチャートである。
【0153】
時刻t31で、道路勾配が所定下り勾配以下になると(図22(A);S301でYes)、下り勾配補正フラグが1にセットされ(図22(C);S303)、道路勾配に応じて下り勾配用出力特性テーブルが設定される(S305)。
【0154】
そして、加速補正フラグ及び勾配補正フラグが0なので、下り勾配用出力特性テーブルが目標出力特性テーブルとして設定される(S310でYes、S311)。
【0155】
時刻t32でアクセルペダルが戻され、時刻t33でアクセル操作量が下り勾配検知時アクセル操作量(時刻t31におけるアクセル操作量)よりも小さくなったのを検知すると(図22(B);S312でYes)、出力特性テーブルを、現在選択されている出力特性テーブルから目標出力特性テーブルとして設定されている下り勾配用出力特性テーブルへと変更する(S313)。
【0156】
そして、時刻t33から時刻t34で、下り勾配用出力特性テーブルを参照して算出されるスロットル開度へと徐々にスロットル開度を変更する(図22(D))。
【0157】
以上説明した本実施形態によれば、道路勾配が所定下り勾配以下になったとき、すなわち自車が下り坂を走行しているときは、出力特性テーブルとして下り勾配用出力特性テーブルを選択し、アクセル操作量に対するスロットル開度の値を小さくする。
【0158】
これにより、アクセルペダルを踏み込んでも加速しにくい出力特性とすることができる。そのため、特に車両が加速しやすい下り坂走行時において、ドライバが必要以上にアクセルペダルを踏み込んだとしても、車両が必要以上に加速するのを抑制できる。
【0159】
また、本実施形態では、下り勾配用出力特性テーブルに、アクセル操作量が小さいときにエンジン出力を所定の微小出力に保持する微小出力領域を設けた。
【0160】
これにより、アクセルペダルを踏み込まずにエンジンブレーキを効かせて下り坂を走行している状態から少しだけアクセルペダルを踏み込んで加速したいときに、アクセルペダルを踏み込みすぎたとしても車両の加速を抑制できる。そのため、車速を容易に調整することができる。
【0161】
(第4実施形態)
次に、本発明の第4実施形態について説明する。本発明の第4実施形態は、下り勾配用出力特性テーブルが第3実施形態と相違する。以下、その相違点を中心に説明する。なお、以下の説明において、変速比とは、変速機の入力軸の回転速度を出力軸の回転速度で割って得られる値をいう。
【0162】
下り坂をアクセルペダルを踏み込まずにエンジンブレーキを効かせてコースト走行している場合、変速機の変速比に応じて車両の加速度は変化する。具体的には、変速比が大きいほど車両の加速度は小さくなる。
【0163】
本実施形態では、道路勾配が所定下り勾配以下となり、かつ、アクセル操作量がゼロになったときは、道路勾配に応じて予め定められた加速度となるように、変速比を変化させている。具体的には、道路勾配が下り側に大きくなるほど変速比が大きくなるように変速機を制御し、車両が加速しすぎないようにしている。
【0164】
したがって、下り坂をコースト走行しているときは、変速比は相対的に大きくなっている。そのため、下り坂をコースト走行している状態から少しだけアクセルペダルを踏み込んで車両を加速させる場合には、エンジン出力を上げなくても変速比が小さくなるように変速機を制御してやれば所望の加速度を得ることができる。
【0165】
そこで本実施形態では、下り勾配用出力特性テーブルに、アクセルペダルが踏み込まれてもスロットル開度を全閉のまま維持し、変速比を小さくすることで車両を加速させる変速制御領域を設けた。
【0166】
図23は、本実施形態による下り勾配用出力特性テーブルについて説明する図である。
【0167】
図23に示すように、本実施形態による下り勾配用出力特性テーブルは、アクセル操作量が所定の変速制御終了操作量(第2操作量)になるまでは、スロットル開度を全閉のまま維持する変速制御領域を備える。また、アクセル操作量が変速制御終了操作量から所定の微小出力保持終了操作量(第1操作量)になるまでは、エンジン出力を所定の微小出力に保持する微小出力領域を備える。
【0168】
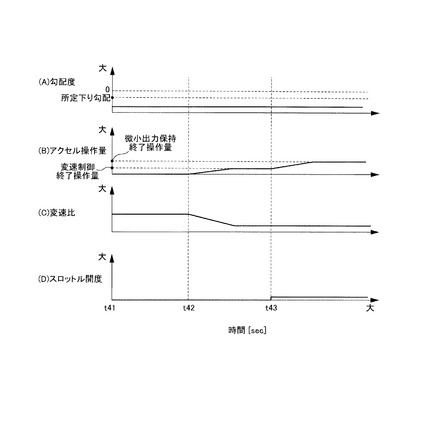
図24は、加速補正フラグ及び勾配補正フラグが0、下り勾配補正フラグが1のときの本実施形態による出力特性制御の動作について説明するタイムチャートである。なお、このタイムチャートでは、時刻t41の時点で、出力特性テーブルは既に下り勾配用出力特性テーブルに変更されているものとする。
【0169】
時刻t41から時刻t42の間は、下り坂をコースト走行している。そのため、加速度を抑えるために、変速比が道路勾配に応じた比較的大きい変速比に制御されている。
【0170】
時刻t42で、アクセルペダルが踏み込まれると、時刻t43でアクセル操作量が変速制御終了操作量を超えるまでは、スロットル開度を全閉にしたまま、変速比を小さくすることで、車両を加速させる。すなわち、スロットル開度を全閉にしたまま、変速比を道路勾配に応じた比較的大きい設定から平坦路走行時の設定に戻してやることで変速比を低下させて車両を加速させる。そして、時刻t43でアクセル操作量が変速制御終了操作量を超えると、エンジン出力が微小出力となるように、スロットル開度が開かれる。
【0171】
このように、本実施形態では、アクセル操作量が変速制御終了操作量を超えるまでは、スロットル開度を全閉にしたまま変速比を低下させることで車両を加速させる。つまり、アクセル操作量が変速制御終了操作量を超えるまでは、エンジン出力をゼロのままにしてコースト走行を持続し、変速比を低下させることで車両を加速させる。これにより、アクセル操作量が変速制御終了操作量を超えるまでは、コースト走行を持続させることができるので、燃料カット状態を維持することができる。したがって、本実施形態によれば、第3実施形態と同様の効果が得られるほか、より燃費を向上させることができる。
【0172】
(第5実施形態)
次に、本発明の第5実施形態について説明する。本発明の第5実施形態は、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定する点で第1実施形態と相違する。以下、その相違点を中心に説明する。
【0173】
第1実施形態では、先行車両との車間距離が詰まってくると、車間距離に応じて推奨車速を制限車速よりも低い車速となるように設定し、エンジン1の出力特性を、アクセルペダルを踏み込んでも加速しにくい出力特性となるように制御していた。
【0174】
しかしながら、走行シーンによっては、先行車両を追い越すために、加速しつつ先行車両との車間距離を詰めていきたい場合がある。このような場合に、エンジン1の出力特性を、先行車両との車間距離が詰まるにつれて加速しにくい出力特性にしてしまうと、運転性能が悪化する。
【0175】
第1実施形態では、アクセル操作速度が所定速度よりも大きくなったときに急加速要求有りと判断し、このような場合にも対応できるようにしていた。しかし、必ずしもこのような場合にアクセル操作速度が所定速度よりも大きくなるとは限らず、先行車両を追い越したい又は先行車両との車間距離を詰めたいというドライバの意思を十分に反映できないおそれがある。
【0176】
そこで本実施形態では、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定することにした。
【0177】
図25は、本実施形態による基本出力特性設定処理について説明するフローチャートである。
【0178】
ステップS501において、コントローラ5は、アクセル操作量が追越操作量以上か否かを判定する。コントローラ5は、アクセル操作量が追越操作量以上であれば、ステップS503の処理を行う。一方で、アクセル操作量が追越操作量より小さければ、ステップS502の処理を行う。
【0179】
ステップS502において、コントローラ5は、方向指示器が作動しているか否かを判定する。コントローラ5は、方向指示器が作動してればステップS503の処理を行う。一方で、方向指示器が作動していなければステップS12の処理を行う。
【0180】
ステップS503において、コントローラ5は、アイドル中か否かを判定する。具体的には、アイドルスイッチがオンになっているか否かを判定する。なお、アイドルスイッチは、アクセル操作量がゼロのときにオンになり、アクセルペダルが踏み込まれるとオフになるスイッチである。コントローラ54は、アイドル中であればステップS12に処理を移行する。一方で、アイドル中でなければステップS504に処理を移行する。
【0181】
ステップS504において、コントローラ5は、ステップS16と同様の方法で要求加速度を算出し、算出した要求加速度を基本目標加速度とする。
【0182】
以上説明した本実施形態によれば、方向指示器が作動しているとき又はアクセル操作量が所定の追越操作量以上のときは、推奨車速を設定せずに、ドライバの要求加速度を基本目標加速度として設定することにした。
【0183】
これにより、先行車両を追い越すときや、先行車両との車間距離を詰めたいときなどに、ドライバの要求通りの加速度を得ることができるので、運転性能の悪化を抑制することができる。
【0184】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0185】
上記実施形態では、エンジン1の出力特性を変化させるためにアクセル操作量に対するスロットル開度の値を変化させていたが、これに限られるものではない。例えば、燃料噴射量を変化させてエンジン1の出力特性を変化させても良い。また、吸気弁のリフト・作動角を連続的に変更可能な可変動弁装置を備える場合には、その可変動弁装置によって吸気弁のリフト量を制御することでエンジン1の出力特性を変化させても良い。
【0186】
また、道路勾配をナビゲーション装置4によって検出することとしたが、車両の前後加速度を検出する加速度センサの検出値に基づき算出しても良い。
【0187】
また、上記第3実施形態において、道路勾配が所定の下り勾配以下になったときに、下り坂に適したゲインを設定し、第2実施形態のように制御しても良い。
【符号の説明】
【0188】
1 火花点火式内燃機関(内燃機関)
S11 道路交通環境検出手段
S12 推奨車速算出手段
S18、S45 目標出力特性設定手段
S22 急加速判定手段
S42 急加速時補正手段
S35、S44 勾配補正手段
S46〜S48 出力特性変更手段
S504 要求加速度算出手段
S305 下り勾配補正手段
【特許請求の範囲】
【請求項1】
車両に搭載された内燃機関の出力特性を制御する出力特性制御装置であって、
自車が走行している道路交通環境を検出する道路交通環境検出手段と、
検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段と、
前記推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する前記内燃機関の出力が低下するように、前記内燃機関の目標出力特性を設定する目標出力特性設定手段と、
前記内燃機関の出力特性を前記目標出力特性へと変更する出力特性変更手段と、
を備えることを特徴とする内燃機関の出力特性制御装置。
【請求項2】
アクセル操作に基づいて、ドライバに車両を加速させる意図があるか否かを判定する加速判定手段と、
ドライバに車両を加速させる意図があると判定したときは、アクセル操作量に対する前記内燃機関の出力が相対的に大きくなる特性となるように、前記内燃機関の目標出力特性を補正する加速時補正手段と、
を備えることを特徴とする請求項1に記載の内燃機関の出力特性制御装置。
【請求項3】
前記加速時補正手段は、
車両を加速させる意図があると判定してから所定車速増加したとき、所定時間経過したとき、又は所定距離走行したときに、補正を終了する、
ことを特徴とする請求項2に記載の内燃機関の出力特性制御装置。
【請求項4】
前記出力特性変更手段は、
ドライバに車両を加速させる意図があると判定したときは、アクセル操作に対する前記内燃機関の応答速度が相対的に速くなるように前記内燃機関の出力特性を前記目標出力特性へと変更する、
ことを特徴とする請求項2又は請求項3に記載の内燃機関の出力特性制御装置。
【請求項5】
道路勾配が大きくなるほど、アクセル操作量に対する前記内燃機関の出力が増大するように、前記内燃機関の目標出力特性を補正する勾配補正手段を備える、
ことを特徴とする請求項1から請求項4までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項6】
前記出力特性変更手段は、
前記内燃機関の目標出力特性が、現在の出力特性よりもアクセル操作量に対する前記内燃機関の出力を増大させる特性となっている場合は、目標出力特性設定時のアクセル操作量と比較してアクセル操作量が増加したときに、前記内燃機関の出力特性をその目標出力特性へと変更する、
ことを特徴とする請求項1から請求項5までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項7】
前記出力特性変更手段は、
前記内燃機関の出力特性を徐々に前記目標出力特性へと変更する、
ことを特徴とする請求項1から請求項6までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項8】
道路勾配が所定の下り勾配以下になったときは、下り勾配がきつくなるほどアクセル操作量に対する前記内燃機関の出力が低下するように、前記内燃機関の目標出力特性を補正する下り勾配補正手段を備える、
ことを特徴とする請求項1から請求項7までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項9】
前記下り勾配補正手段は、
アクセル操作量が所定の第1操作量以下のときは、前記内燃機関の出力が、アイドル状態を維持するために必要な出力よりも少し高い所定の出力となるように、その内燃機関の目標出力特性を補正する、
ことを特徴とする請求項8に記載の内燃機関の出力特性制御装置。
【請求項10】
道路勾配が前記下り勾配以下の道路をコースト走行している状態からアクセルペダルが踏み込まれたときは、変速比を低下させる変速比制御手段を備え、
前記下り勾配補正手段は、
アクセル操作量が前記第1操作量よりも小さい所定の第2操作量以下のときは、前記内燃機関の出力がゼロとなるように、その内燃機関の目標出力特性を補正する、
ことを特徴とする請求項9に記載の内燃機関の出力特性制御装置。
【請求項11】
アクセル操作量に応じてドライバの要求加速度を算出する要求加速度算出手段を備え、
前記目標出力特性設定手段は、
方向指示器が作動しているときは、前記要求加速度に基づいて前記内燃機関の目標出力特性設定する、
ことを特徴とする請求項1から請求項10までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項12】
アクセル操作量に応じてドライバの要求加速度を算出する要求加速度算出手段を備え、
前記目標出力特性設定手段は、
アクセル操作量が所定の追越操作量以上のときは、前記要求加速度に基づいて前記内燃機関の目標出力特性設定する、
ことを特徴とする請求項1から請求項10までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項1】
車両に搭載された内燃機関の出力特性を制御する出力特性制御装置であって、
自車が走行している道路交通環境を検出する道路交通環境検出手段と、
検出した道路交通環境における自車の推奨車速を算出する推奨車速算出手段と、
前記推奨車速と自車速との車速差が小さくになるにつれてアクセル操作量に対する前記内燃機関の出力が低下するように、前記内燃機関の目標出力特性を設定する目標出力特性設定手段と、
前記内燃機関の出力特性を前記目標出力特性へと変更する出力特性変更手段と、
を備えることを特徴とする内燃機関の出力特性制御装置。
【請求項2】
アクセル操作に基づいて、ドライバに車両を加速させる意図があるか否かを判定する加速判定手段と、
ドライバに車両を加速させる意図があると判定したときは、アクセル操作量に対する前記内燃機関の出力が相対的に大きくなる特性となるように、前記内燃機関の目標出力特性を補正する加速時補正手段と、
を備えることを特徴とする請求項1に記載の内燃機関の出力特性制御装置。
【請求項3】
前記加速時補正手段は、
車両を加速させる意図があると判定してから所定車速増加したとき、所定時間経過したとき、又は所定距離走行したときに、補正を終了する、
ことを特徴とする請求項2に記載の内燃機関の出力特性制御装置。
【請求項4】
前記出力特性変更手段は、
ドライバに車両を加速させる意図があると判定したときは、アクセル操作に対する前記内燃機関の応答速度が相対的に速くなるように前記内燃機関の出力特性を前記目標出力特性へと変更する、
ことを特徴とする請求項2又は請求項3に記載の内燃機関の出力特性制御装置。
【請求項5】
道路勾配が大きくなるほど、アクセル操作量に対する前記内燃機関の出力が増大するように、前記内燃機関の目標出力特性を補正する勾配補正手段を備える、
ことを特徴とする請求項1から請求項4までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項6】
前記出力特性変更手段は、
前記内燃機関の目標出力特性が、現在の出力特性よりもアクセル操作量に対する前記内燃機関の出力を増大させる特性となっている場合は、目標出力特性設定時のアクセル操作量と比較してアクセル操作量が増加したときに、前記内燃機関の出力特性をその目標出力特性へと変更する、
ことを特徴とする請求項1から請求項5までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項7】
前記出力特性変更手段は、
前記内燃機関の出力特性を徐々に前記目標出力特性へと変更する、
ことを特徴とする請求項1から請求項6までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項8】
道路勾配が所定の下り勾配以下になったときは、下り勾配がきつくなるほどアクセル操作量に対する前記内燃機関の出力が低下するように、前記内燃機関の目標出力特性を補正する下り勾配補正手段を備える、
ことを特徴とする請求項1から請求項7までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項9】
前記下り勾配補正手段は、
アクセル操作量が所定の第1操作量以下のときは、前記内燃機関の出力が、アイドル状態を維持するために必要な出力よりも少し高い所定の出力となるように、その内燃機関の目標出力特性を補正する、
ことを特徴とする請求項8に記載の内燃機関の出力特性制御装置。
【請求項10】
道路勾配が前記下り勾配以下の道路をコースト走行している状態からアクセルペダルが踏み込まれたときは、変速比を低下させる変速比制御手段を備え、
前記下り勾配補正手段は、
アクセル操作量が前記第1操作量よりも小さい所定の第2操作量以下のときは、前記内燃機関の出力がゼロとなるように、その内燃機関の目標出力特性を補正する、
ことを特徴とする請求項9に記載の内燃機関の出力特性制御装置。
【請求項11】
アクセル操作量に応じてドライバの要求加速度を算出する要求加速度算出手段を備え、
前記目標出力特性設定手段は、
方向指示器が作動しているときは、前記要求加速度に基づいて前記内燃機関の目標出力特性設定する、
ことを特徴とする請求項1から請求項10までのいずれか1つに記載の内燃機関の出力特性制御装置。
【請求項12】
アクセル操作量に応じてドライバの要求加速度を算出する要求加速度算出手段を備え、
前記目標出力特性設定手段は、
アクセル操作量が所定の追越操作量以上のときは、前記要求加速度に基づいて前記内燃機関の目標出力特性設定する、
ことを特徴とする請求項1から請求項10までのいずれか1つに記載の内燃機関の出力特性制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2012−163092(P2012−163092A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−143177(P2011−143177)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]