
内燃機関の空燃比制御装置
【課題】機関運転に影響を与えることなく、空燃比センサの応答性に起因した排気性能の悪化を抑えることのできる内燃機関の空燃比制御装置を提供する。
【解決手段】電子制御装置22は、排気通路13に設けられた空燃比センサ19の出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する。そして、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、空燃比フィードバック制御の開始時期を可変設定する。
【解決手段】電子制御装置22は、排気通路13に設けられた空燃比センサ19の出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する。そして、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、空燃比フィードバック制御の開始時期を可変設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関の空燃比制御装置に関するものである。
【背景技術】
【0002】
内燃機関では、排気通路に設けられた空燃比センサの出力値に基づいて空燃比のフィードバック制御が行われる。この空燃比フィードバック制御は、減速時などに行われる燃料カットの実行中には中止され、燃料カットから復帰すると再び開始される。
【0003】
ここで、実空燃比の変化に対する空燃比センサの出力変化の応答性は、同センサの劣化度合や活性度合に応じて変化する。そして、同センサの応答性が低下しているときには、燃料カットから復帰した後において、実空燃比の変化に対してセンサにて検出される検出空燃比の変化が遅れるため、実空燃比に対して検出空燃比はリーン側にずれる。このような状態のときに空燃比フィードバック制御が行われると、空燃比はリッチ側に過補正されてしまい、排気性能が悪化するおそれがある。
【0004】
このような空燃比センサの応答性低下による排気性能の悪化を抑えるために、特許文献1に記載の装置では、燃料カットから復帰した後、検出空燃比が所定の判定値に達してから空燃比フィードバック制御を開始するようにしており、さらにはその判定値を空燃比センサの応答性に応じて補正するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−189022号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記文献1に記載の装置では、空燃比センサの応答性に応じて上記判定値を補正するようにしているが、空燃比センサの応答性を把握するときには、空燃比フィードバック制御の実行中に目標空燃比を切り換えるようにしているため、機関運転に少なからず影響を与えてしまう。
【0007】
本発明は、上記実情に鑑みてなされたものであり、その目的は、機関運転に影響を与えることなく、空燃比センサの応答性に起因した排気性能の悪化を抑えることのできる内燃機関の空燃比制御装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段及びその作用効果について記載する。
請求項1に記載の発明は、排気通路に設けられた空燃比センサの出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する内燃機関の空燃比制御装置において、燃料カット復帰後に前記空燃比センサで検出される空燃比の変化速度に基づいて前記開始時期を可変設定することをその要旨とする。
【0009】
空燃比センサの応答性が低下しているときには、燃料カット復帰後に同センサで検出される空燃比の変化速度が遅くなる傾向がある。そこで、同構成では、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサで検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサの応答性の低下度合いに合わせて上記開始時期を設定することができる。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、同構成では、燃料カット復帰後に空燃比センサで検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0010】
このように同構成によれば、機関運転に影響を与えることなく、空燃比センサの応答性に起因した燃料カット復帰直後の排気性能の悪化を抑えることができるようになる。
空燃比の変化速度に基づいて上記開始時期を可変設定するに際して、その変化速度を示す値としては、請求項2に記載の発明によるように、燃料カット復帰後の所定期間に前記空燃比センサで検出される空燃比の変化量を計測する、という構成を採用することができる。
【0011】
そして、上述したように空燃比センサの応答性が低下しているときには、同センサで検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど上記開始時期を遅くする必要がある。そこで、空燃比の変化速度を示す値として、空燃比の上記変化量を計測する場合には、請求項3に記載の発明によるように、前記変化量が小さいときほど、つまり空燃比の変化速度が遅いときほど前記開始時期は遅くされる、という構成を採用することにより、空燃比フィードバック制御の開始時期を最適化できる。
【0012】
請求項4に記載の発明は、請求項3に記載の内燃機関の空燃比制御装置において、前記変化量に対応する前記開始時期は、吸入空気量が多いときほど遅くされることをその要旨とする。
【0013】
燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量が多いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量が多いときほど変化速度は速くなる。従って、空燃比の変化量は、吸入空気量が多いときほど空燃比センサの応答性に応じた変化量よりも大きくなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、空燃比の変化量に対応する上記開始時期は吸入空気量が多いときほど遅くされる。そのため、所定期間内における空燃比の変化量に基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量が開始時期に対して与える悪影響を抑えることができる。
【0014】
請求項5に記載の発明は、請求項3に記載の内燃機関の空燃比制御装置において、前記変化量に対応する前記開始時期は、機関回転速度が高いときほど遅くされることをその要旨とする。
【0015】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度が高いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度が高いときほど変化速度は速くなる。従って、空燃比の変化量は、機関回転速度が高いときほど空燃比センサの応答性に応じた変化量よりも大きくなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、空燃比の変化量に対応する上記開始時期は機関回転速度が高いときほど遅くされる。そのため、所定期間内における空燃比の変化量に基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度が開始時期に対して与える悪影響を抑えることができる。
【0016】
また、空燃比の変化速度に基づいて上記開始時期を可変設定するに際して、その変化速度を示す値としては、請求項6に記載の発明によるように、燃料カット復帰後に前記空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間を計測する、という構成を採用することもできる。
【0017】
そして、上述したように空燃比センサの応答性が低下しているときには、同センサで検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど上記開始時期を遅くする必要がある。そこで、空燃比の変化速度を示す値として上記到達時間を計測する場合には、請求項7に記載の発明によるように、前記到達時間が長いときほど、つまり空燃比の変化速度が遅いときほど前記開始時期は遅くされる、という構成を採用することにより、空燃比フィードバック制御の開始時期を最適化できる。
【0018】
請求項8に記載の発明は、請求項7に記載の内燃機関の空燃比制御装置において、前記到達時間に対応する前記開始時期は、吸入空気量が多いときほど遅くされることをその要旨とする。
【0019】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量が多いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量が多いときほど変化速度は速くなる。従って、上記到達時間は、吸入空気量が多いときほど空燃比センサの応答性に応じた到達時間よりも短くなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、上記到達時間に対応する上記開始時期は吸入空気量が多いときほど遅くされる。そのため、燃料カット復帰後に空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間に基づき、空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量が開始時期に対して与える悪影響を抑えることができる。
【0020】
請求項9に記載の発明は、請求項7に記載の内燃機関の空燃比制御装置において、前記到達時間に対応する前記開始時期は、機関回転速度が高いときほど遅くされることをその要旨とする。
【0021】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度が高いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度が高いときほど変化速度は速くなる。従って、上記到達時間は、機関回転速度が高いときほど空燃比センサの応答性に応じた到達時間よりも短くなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、上記到達時間に対応する上記開始時期は機関回転速度が高いときほど遅くされる。そのため、燃料カット復帰後に空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間に基づき、空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度が開始時期に対して与える悪影響を抑えることができる。
【0022】
請求項10に記載の発明は、請求項6〜9のいずれか1項に記載の内燃機関の空燃比制御装置において、前記判定値は、燃料カットからの復帰時に前記空燃比センサで検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が設定されることをその要旨とする。
【0023】
同構成によれば、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきに応じて判定値が変化するようになる。つまり、燃料カット中に空燃比センサで検出される空燃比がばらついていても、検出空燃比が上記判定値に達するまでの間の空燃比の変化幅は一定に維持される。従って、燃料カット中の検出空燃比のばらつきが上記到達時間に与える影響を抑えることができ、同到達時間の精度が向上するようになる。
【図面の簡単な説明】
【0024】
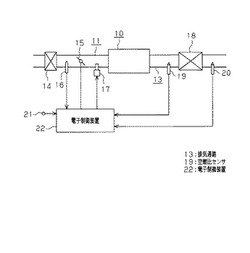
【図1】本発明にかかる内燃機関の空燃比制御装置を具体化した第1実施形態にあって、これが適用される内燃機関及びその周辺構造を示す模式図。
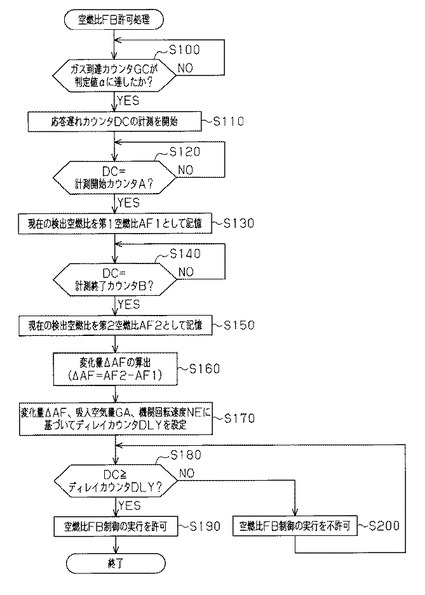
【図2】同実施形態における空燃比フィードバック許可処理の手順を示すフローチャート。
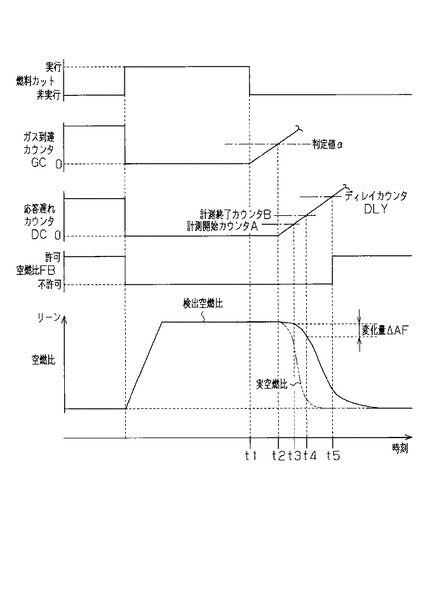
【図3】同実施形態における空燃比フィードバック許可処理の実行態様を示すタイミングチャート。
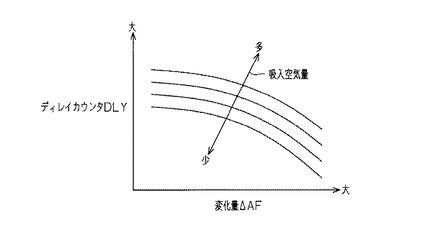
【図4】空燃比の変化量、吸入空気量、及びディレイカウンタの関係を示すグラフ。
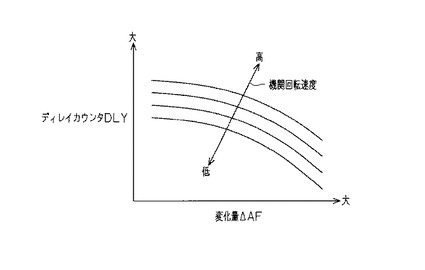
【図5】空燃比の変化量、機関回転速度、及びディレイカウンタの関係を示すグラフ。
【図6】第2実施形態における空燃比フィードバック許可処理の手順を示すフローチャート。
【図7】同実施形態における空燃比フィードバック許可処理の実行態様を示すタイミングチャート。
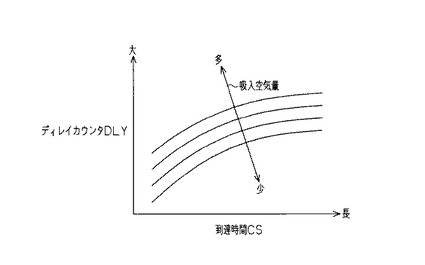
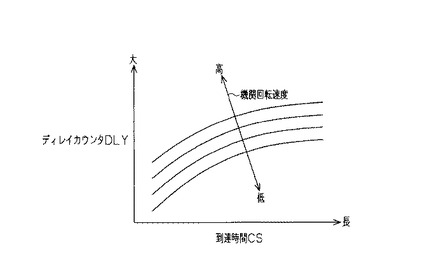
【図8】到達時間、吸入空気量、及びディレイカウンタの関係を示すグラフ。
【図9】到達時間、機関回転速度、及びディレイカウンタの関係を示すグラフ。
【発明を実施するための形態】
【0025】
(第1実施形態)
以下、この発明にかかる内燃機関の空燃比制御装置を具体化した第1実施形態について、図1〜図5を参照して説明する。
【0026】
図1に示すように、内燃機関10には吸気通路11が接続されている。この吸気通路11には、通路面積を可変とするスロットルバルブ15が設けられており、その開度制御によりエアクリーナ14を通じて吸入される空気の量が調整される。また、吸入された空気の量(吸入空気量GA)は、エアフロメータ16にて検出される。そして吸気通路11に吸入された空気は、スロットルバルブ15の下流に設けられたインジェクタ17から噴射される燃料と混合された後、内燃機関10の燃焼室に送られて燃焼される。
【0027】
燃焼室での燃焼により生じた排気が送られる排気通路13には、排気中の成分を浄化する排気浄化用の触媒18が設けられている。この触媒18は、理論空燃比近傍での燃焼が行われる状態において、排気中のHCやCOを酸化するとともに同排気中のNOxを還元して排気を浄化する作用を有している。また、この触媒18は、これを通過する排気の空燃比が理論空燃比よりもリーンの時には排気中の酸素を吸蔵し、同空燃比が理論空燃比よりもリッチのときには吸蔵した酸素を放出するといった酸素ストレージ作用を有している。
【0028】
触媒18の上流側には空燃比センサ19が設けられている。また、触媒18の下流側には酸素センサ20が設けられている。
空燃比センサ19は、周知の限界電流式酸素センサである。この限界電流式酸素センサは、濃淡電池式酸素センサの検出部に拡散律速層と呼ばれるセラミック層を備えることにより排気中の酸素濃度に応じた出力電流が得られるセンサであり、排気中の酸素濃度と密接な関係にある空燃比が理論空燃比である場合には、その出力電流は「0」になる。また、空燃比がリッチになるにつれて出力電流は負の方向に大きくなり、空燃比がリーンになるにつれて出力電流は正の方向に大きくなる。従って、この空燃比センサ19の出力値に基づき、触媒18上流側の空燃比についてそのリーン度合いやリッチ度合いを検出することができる。
【0029】
また、酸素センサ20は、周知の濃淡電池式の酸素センサである。この濃淡電池式酸素センサの出力特性は、空燃比が理論空燃比よりもリッチのときには約1V程度の出力が得られ、空燃比が理論空燃比よりもリーンのときには約0V程度の出力が得られる。また、理論空燃比近傍でその出力電圧が大きく変化するようになっている。従って、この酸素センサ20の出力値に基づき、触媒18下流側の空燃比がリーンとなっているかリッチとなっているかを検出することができる。なお、本実施形態では、酸素センサ20の出力電圧が「0.45V」以上の場合に、空燃比は「リッチ」であると判定し、出力電圧が「0.45V」未満の場合には、空燃比が「リーン」であると判定される。また、この酸素センサ20は、触媒18での排気浄化作用の状態を監視するために同触媒18の下流側に設けられている。すなわち、空燃比センサ19の出力がリッチを示しているときに酸素センサ20の出力がリーンとなっているときには、触媒18から酸素が放出されており、同触媒18での酸化作用が促進されていることが把握される。一方、空燃比センサ19の出力がリーンを示しているときに酸素センサ20の出力がリッチとなっているときには、触媒18に酸素が吸蔵されており、同触媒18での還元作用が促進されていることが把握される。
【0030】
上記触媒18は、燃焼される混合気の空燃比が理論空燃比近傍の狭い範囲(ウインドウ)でのみ、排気中の主要有害成分(HC、CO、NOx)のすべてを酸化還元反応により効率的に浄化する。そうした触媒18を有効に機能させるには、混合気の空燃比を上記ウインドウの中心に合わせこむ、厳密な空燃比制御が必要となる。
【0031】
そうした空燃比の制御は、電子制御装置22により行われる。電子制御装置22には、上記エアフロメータ16や上記空燃比センサ19、酸素センサ20、アクセルペダルの操作量を検出するアクセルセンサ、あるいは機関回転速度NEを検出する回転速度センサ21を始めとする各種センサ類の検出信号が入力される。そしてそれらセンサ類の検出信号で把握される内燃機関10の運転状況に応じて、上記スロットルバルブ15やインジェクタ17等を駆動制御して上記空燃比制御を行っている。電子制御装置22による空燃比制御の概要は次の通りである。
【0032】
まず電子制御装置22は、上記アクセルペダルの操作量や機関回転速度の検出結果に応じて把握される吸入空気量の要求量を求め、それに応じた吸入空気量が得られるようにスロットルバルブ15の開度を調整する。その一方、エアフロメータ16により検出される吸入空気量の実測値に対して、理論空燃比が得られるだけの燃料量を求め、それによりインジェクタ17からの燃料噴射量を調整する。これにより、燃焼室で燃焼される混合気の空燃比を、ある程度に理論空燃比に近づけることはできる。ただし、それだけでは上記要求される高精度の空燃比制御には不十分である。
【0033】
そこで電子制御装置22は、上記空燃比センサ19の検出結果により、触媒18の上流側の空燃比についてその実測値を把握し、この実測値と目標空燃比、すなわち理論空燃比との乖離度合に基づいて算出される空燃比フィードバック補正量に基づいて、インジェクタ17の燃料噴射量をフィードバック補正している。この空燃比フィードバック制御により、要求される空燃比制御の精度が確保される。
【0034】
また、電子制御装置22は、上記酸素センサ20の検出結果より、触媒18の酸素吸蔵状態、あるいは酸素放出状態を推定し、この推定に基づいて上記空燃比フィードバック補正量に対する修正を行う。この修正処理では、酸素センサ20の出力に基づいて算出されるサブフィードバック補正量SFBが増減補正され、同サブフィードバック補正量SFBによって上記空燃比フィードバック補正量は修正される。具体的には、酸素センサ20の出力がリッチを示している間は、触媒18上流側の空燃比が一定量ずつリーン寄りに変化するように、すなわち触媒18上流側の空燃比が少しずつリーン側に近づいていくように、サブフィードバック補正量SFBが一定量ずつマイナス側に増大される。一方、酸素センサ20の出力がリーンを示している間は、触媒18上流側の空燃比が一定量ずつリッチ寄りに変化するように、すなわち触媒18上流側の空燃比が少しずつリッチ側に近づいていくように、サブフィードバック補正量SFBが一定量ずつプラス側に増大される。このようなサブフィードバック制御により、触媒18の浄化作用が有効に活用される。
【0035】
また、内燃機関10では、減速時などにおいて、インジェクタ17からの燃料噴射を中止する、いわゆる燃料カットが実行される。この燃料カットが実行されると、排気通路13には新気が導入されるため、空燃比センサ19の検出空燃比はリーンを示す。また、燃料カット実行中には、上記空燃比フィードバック制御は中止される。そして、燃料カットが中止されて再び燃料噴射が開始される、いわゆる燃料カットの復帰が行われると、混合気の燃焼ガスが排気通路13に導入されるため、空燃比センサ19の検出空燃比はリーンからリッチ側に変化していく。
【0036】
ここで、上述したように、実空燃比の変化に対する空燃比センサ19の出力変化の応答性は、同センサ19の劣化度合や活性度合に応じて変化する。そして、同センサ19の応答性が低下しているときには、燃料カットから復帰した後において、実空燃比の変化に対して空燃比センサ19の検出空燃比の変化が遅れるため、実空燃比に対して検出空燃比はリーン側にずれる。このような状態のときに空燃比フィードバック制御が再開されると、実際の空燃比はリッチ側に過補正されてしまい、排気性能が悪化するおそれがある。
【0037】
そこで本実施形態では、燃料カット復帰後に再開される空燃比フィードバック制御についてその開始時期を、空燃比センサ19の応答性に合わせて可変設定するようにしている。
【0038】
以下、燃料カット(FC)復帰後における空燃比フィードバック制御(空燃比FB制御)の再開可否についてこれを判定する処理であって、空燃比FB制御の開始時期を可変設定する空燃比FB許可処理の手順を説明する。なお、図2に示す本処理は、燃料カットからの復帰直後に電子制御装置22によって実行される。また、この空燃比FB許可処理の実行に伴う各パラメータの変化態様を図3に示す。
【0039】
図2に示すように、本処理が開始されるとまず、ガス到達カウンタGCが判定値αに達するまでステップS100での判定が繰り返し行われる。このガス到達カウンタGCは、図3に示すように、燃料カットの実行が中止されて燃料噴射が再開された時点で(時刻t1)その計測が開始される。そして、ガス到達カウンタGCが判定値αに達すると(S100:YES、図3の時刻t2)、燃料カットの復帰に伴って発生した燃焼ガスが空燃比センサ19に到達した、つまり空燃比センサ19の周囲は新気から燃焼ガスに変化したと判断されて、応答遅れカウンタDCの計測が開始される(S110、図3の時刻t2)。
【0040】
次に、応答遅れカウンタDCが計測開始カウンタAに達するまで、ステップS120での判定が繰り返し行われる。この計測開始カウンタAは、図3に示すように、燃料カットからの復帰に伴い、それまでリーンであった検出空燃比がリッチ側に変化し始めた時期(時刻t2)から若干経過した時期(時刻t3)であって、検出空燃比の変化量が比較的大きくなり始める時期に相当する値となっている。
【0041】
そして、応答遅れカウンタDCが計測開始カウンタAに達すると(S120:YES、図3の時刻t3)、現在、空燃比センサ19で検出されている検出空燃比が第1空燃比AF1として、電子制御装置22のメモリに記憶される。
【0042】
次に、応答遅れカウンタDCが計測終了カウンタBに達するまで、ステップS140での判定が繰り返し行われる。この計測終了カウンタBは、図3に示すように、応答遅れカウンタDCが計測開始カウンタAに達した時期(時刻t3)から所定期間経過した後の時期(時刻t4)に相当する値であって、時刻t3からの検出空燃比の変化量を十分に計測可能な時期に相当する値が設定されている。
【0043】
そして、応答遅れカウンタDCが計測終了カウンタBに達すると(S140:YES、図3の時刻t4)、現在、空燃比センサ19で検出されている検出空燃比が第2空燃比AF2として、電子制御装置22のメモリに記憶される。
【0044】
次に、第2空燃比AF2から第1空燃比AF1を減じることにより、応答遅れカウンタDCが計測開始カウンタAに達してから計測終了カウンタBに達するまでの間の期間内における空燃比の変化量ΔAFが算出される(S160)。
【0045】
そして、変化量ΔAF、現在の吸入空気量GA、現在の機関回転速度NEに基づいてディレイカウンタDLYが設定される(S170)。図4に示すように、このディレイカウンタDLYは、変化量ΔAFが小さいときほど大きい値に設定される。また、変化量ΔAFが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値に設定される。また、図5に示すように、変化量ΔAFが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値に設定される。
【0046】
こうしてディレイカウンタDLYが設定されると、応答遅れカウンタDCがディレイカウンタDLY以上になったか否かが判定される(S180)。そして、応答遅れカウンタDCがディレイカウンタDLY未満のときには(S180:NO)、応答遅れカウンタDCがディレイカウンタDLY以上になるまで、空燃比フィードバック制御の実行が不許可とされる(S200)。
【0047】
一方、応答遅れカウンタDCがディレイカウンタDLY以上になると(S180:YES、図3の時刻t5)、空燃比フィードバック制御の実行が許可されて(S190)、本処理は終了される。このように空燃比フィードバック制御の実行が許可されると、他の実行不許可条件(例えば空燃比センサ19の不活性化による実行不許可など)が成立していない限り、空燃比フィードバック制御が開始される(図3の時刻t5以降)。
【0048】
次に、本実施形態の作用を説明する。
空燃比センサ19の応答性が低下しているときには、燃料カット復帰後に同センサ19で検出される空燃比の変化速度が遅くなる傾向がある。この変化速度が遅いときには、所定期間内における空燃比の変化量が小さくなるため、変化速度を示す値として所定期間内における空燃比の変化量を利用することができる。
【0049】
そこで、本実施形態では、可変とされるディレイカウンタDLYを設定し、燃料カット復帰後の空燃比フィードバック制御の開始は、応答遅れカウンタDCがディレイカウンタDLYに達してから開始するようにしている。つまりディレイカウンタDLYを可変設定することで空燃比フィードバック制御の開始時期を可変設定するようにしているが、そのディレイカウンタDLYを、所定期間(応答遅れカウンタDCが計測開始カウンタAに達してから計測終了カウンタBに達するまでの間の期間)における検出空燃比の変化量ΔAFに基づいて可変設定するようにしている。換言すれば、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサ19の応答性の低下度合いに合わせて、空燃比フィードバック制御の開始時期が設定される。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、上述したような空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、本実施形態では、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0050】
また、上述したように空燃比センサ19の応答性が低下しているときには、同センサ19で検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど空燃比フィードバック制御の開始時期を遅くする必要がある。そこで、先の図4や図5に示したように、変化量ΔAFが小さいときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYの値を大きくすることにより、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期が最適化される。
【0051】
また、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量GAが多いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量GAが多いときほど変化速度は速くなる。従って、空燃比の変化量ΔAFは、吸入空気量GAが多いときほど空燃比センサ19の応答性に応じた変化量よりも大きくなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図4に示したように、変化量ΔAFが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、空燃比の変化量ΔAFに対応するディレイカウンタDLYは、吸入空気量GAが多いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は吸入空気量GAが多いときほど遅くされる。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響が抑えられる。
【0052】
また、上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度NEが高いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度NEが高いときほど変化速度は速くなる。従って、空燃比の変化量ΔAFは、機関回転速度NEが高いときほど空燃比センサ19の応答性に応じた変化量よりも大きくなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図5に示したように、変化量ΔAFが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、空燃比の変化量ΔAFに対応するディレイカウンタDLYは、機関回転速度NEが高いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は機関回転速度NEが高いときほど遅くされる。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響が抑えられる。
【0053】
以上説明したように、本実施形態によれば、以下の効果を得ることができる。
(1)燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、より詳細には燃料カット復帰後の所定期間内に空燃比センサ19で検出される空燃比の変化量ΔAFに基づき、空燃比フィードバック制御の開始時期を可変設定するようにしている。従って、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化を抑えることができる。さらに、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0054】
(2)空燃比の変化量ΔAFが小さいときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYを大きくすることで、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期を最適化できる。
【0055】
(3)空燃比の変化量ΔAFに対応するディレイカウンタDLYを吸入空気量GAが多いときほど大きくすることで、空燃比の変化量ΔAFに対応する空燃比フィードバック制御の開始時期が、吸入空気量GAの多いときほど遅くなるようにしている。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響を抑えることができる。
【0056】
(4)空燃比の変化量ΔAFに対応するディレイカウンタDLYを機関回転速度NEが高いときほど大きくすることで、空燃比の変化量ΔAFに対応する空燃比フィードバック制御の開始時期が、機関回転速度NEの高いときほど遅くなるようにしている。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響を抑えることができる。
(第2実施形態)
次に、この発明にかかる内燃機関の空燃比制御装置を具体化した第2実施形態について、図6〜図9を参照して説明する。
【0057】
第1実施形態では、空燃比の変化速度を示す値として、燃料カット復帰後の所定期間に空燃比センサ19で検出される空燃比の変化量ΔAFを計測するようにした。これに代えて、本実施形態では、空燃比の変化速度を示す値として、燃料カット復帰後に空燃比センサ19で検出される空燃比が所定の判定値AFaに達するまでの到達時間CSを計測するようにしている。そして、この到達時間CSに基づいて上記ディレイカウンタDLYを設定するようにしており、空燃比FB許可処理の一部が異なっている。そこで以下では、第1実施形態との相異点を中心にして、本実施形態にかかる空燃比制御装置を説明する。
【0058】
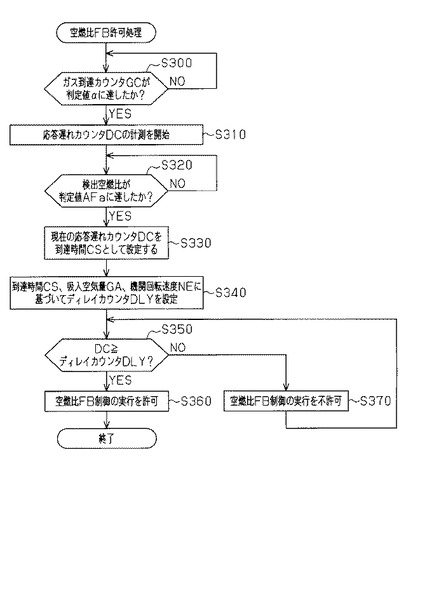
なお、図6に示す本実施形態の空燃比FB許可処理も、燃料カットからの復帰直後に電子制御装置22によって実行される。また、この空燃比FB許可処理の実行に伴う各パラメータの変化態様を図7に示す。
【0059】
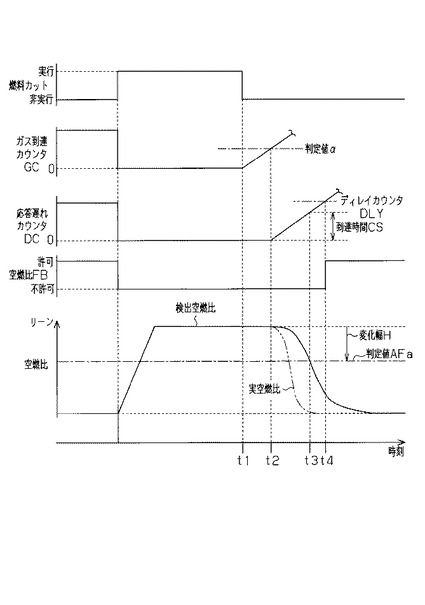
図6に示すように、本処理が開始されるとまず、ガス到達カウンタGCが判定値αに達するまでステップS300での判定が繰り返し行われる。このガス到達カウンタGCも、図7に示すように、燃料カットの実行が中止されて燃料噴射が再開された時点で(時刻t1)その計測が開始される。そして、ガス到達カウンタGCが判定値αに達すると(S300:YES、図7の時刻t2)、燃料カットの復帰に伴って発生した燃焼ガスが空燃比センサ19に到達した、つまり空燃比センサ19の周囲は新気から燃焼ガスに変化したと判断されて、応答遅れカウンタDCの計測が開始される(S310、図7の時刻t2)。
【0060】
次に空燃比センサ19の検出空燃比が判定値AFaに達するまで、ステップS320での判定が繰り返し行われる。この判定値AFaは、本処理が実行される毎に以下のようにして算出される。すなわち、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が判定値AFaとして設定される。より詳細には、図7に示すように、時刻t1にて燃料カットから復帰したときに空燃比センサ19で検出された検出空燃比AFを基準値として取り込み、この取り込んだ基準値から予め定められた変化幅Hの分だけリッチ側の値が判定値AFaとして算出される。
【0061】
そして、検出空燃比が判定値AFaに達すると(S320:YES、図7の時刻t3)、燃料カット復帰後の検出空燃比がリーンからある程度リッチ側に変化しており、後述のディレイカウンタDLYを設定するのに十分な程度に検出空燃比は変化したと判断される。そして、現在の応答遅れカウンタDCが上記到達時間CSとして設定される(S330)。
【0062】
次に、到達時間CS、現在の吸入空気量GA、現在の機関回転速度NEに基づいてディレイカウンタDLYが設定される(S340)。図8に示すように、このディレイカウンタDLYは、到達時間CSが長いときほど大きい値に設定される。また、到達時間CSが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値に設定される。また、図9に示すように、到達時間CSが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値に設定される。
【0063】
こうしてディレイカウンタDLYが設定されると、応答遅れカウンタDCがディレイカウンタDLY以上になったか否かが判定される(S350)。そして、応答遅れカウンタDCがディレイカウンタDLY未満のときには(S350:NO)、応答遅れカウンタDCがディレイカウンタDLY以上になるまで、空燃比フィードバック制御の実行が不許可とされる(S370)。
【0064】
一方、応答遅れカウンタDCがディレイカウンタDLY以上になると(S350:YES、図7の時刻t4)、空燃比フィードバック制御の実行が許可されて(S360)、本処理は終了される。このように空燃比フィードバック制御の実行が許可されると、他の実行不許可条件(例えば空燃比センサ19の不活性化による実行不許可など)が成立していない限り、空燃比フィードバック制御が開始される(図7の時刻t4以降)。
【0065】
次に、本実施形態の作用を説明する。
上述したように空燃比センサ19の応答性が低下しているときには、燃料カット復帰後に同センサ19で検出される空燃比の変化速度が遅くなる傾向がある。この変化速度が遅いときには上記到達時間CSが長くなるため、変化速度を示す値として、燃料カット復帰後に空燃比センサ19で検出される空燃比が所定の判定値AFaに達するまでの上記到達時間CSを利用することができる。
【0066】
そこで、本実施形態では、可変とされるディレイカウンタDLYを設定し、燃料カット復帰後の空燃比フィードバック制御の開始は、応答遅れカウンタDCがディレイカウンタDLYに達してから開始するようにしている。つまりディレイカウンタDLYを可変設定することで空燃比フィードバック制御の開始時期を可変設定するようにしているが、そのディレイカウンタDLYを、上記到達時間CSに基づいて可変設定するようにしている。換言すれば、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサ19の応答性の低下度合いに合わせて、空燃比フィードバック制御の開始時期が設定される。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、上述したような空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、本実施形態でも、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0067】
また、上述したように空燃比センサ19の応答性が低下しているときには、同センサ19で検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど空燃比フィードバック制御の開始時期を遅くする必要がある。そこで、先の図8や図9に示したように、到達時間CSが長いときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYの値を大きくすることにより、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期が最適化される。
【0068】
また、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量GAが多いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量GAが多いときほど変化速度は速くなる。従って、到達時間CSは、吸入空気量GAが多いときほど、空燃比センサ19の応答性に応じた到達時間よりも短くなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図8に示したように、到達時間CSが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、到達時間CSに対応するディレイカウンタDLYは、吸入空気量GAが多いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は吸入空気量GAが多いときほど遅くされる。そのため、到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響が抑えられる。
【0069】
また、上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度NEが高いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度NEが高いときほど変化速度は速くなる。従って、到達時間CSは、機関回転速度NEが高いときほど空燃比センサ19の応答性に応じた到達時間よりも短くなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図9に示したように、到達時間CSが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、到達時間CSに対応するディレイカウンタDLYは、機関回転速度NEが高いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は機関回転速度NEが高いときほど遅くされる。そのため、到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響が抑えられる。
【0070】
また、上記判定値AFaを仮に固定値とした場合には、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきの影響で検出空燃比が判定値AFaに達するまでの時間、つまり上記到達時間CSが変化してしまう。この点、本実施形態では、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にして、この基準値から所定の変化幅Hの分だけリッチ側の値を判定値AFaとして設定するようにしている。従って、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきに応じて判定値AFaが変化する。つまり、燃料カット中に空燃比センサ19で検出される空燃比がばらついていても、検出空燃比が上記判定値AFaに達するまでの間の空燃比の変化幅Hは一定に維持される。従って、燃料カット中の検出空燃比のばらつきが上記到達時間CSに与える影響を抑えることができ、同到達時間CSの精度が向上するようになる。
【0071】
以上説明したように、本実施形態によれば、以下の効果を得ることができる。
(1)燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、より詳細には燃料カット復帰後に空燃比センサ19で検出される空燃比が判定値AFaに達するまでの到達時間CSに基づき、空燃比フィードバック制御の開始時期を可変設定するようにしている。従って、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化を抑えることができる。さらに、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0072】
(2)上記到達時間CSが長いときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYを大きくすることで、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期を最適化できる。
【0073】
(3)上記到達時間CSに対応するディレイカウンタDLYを吸入空気量GAが多いときほど大きくすることで、到達時間CSに対応する空燃比フィードバック制御の開始時期が、吸入空気量GAの多いときほど遅くなるようにしている。そのため、上記到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響を抑えることができる。
【0074】
(4)上記到達時間CSに対応するディレイカウンタDLYを機関回転速度NEが高いときほど大きくすることで、到達時間CSに対応する空燃比フィードバック制御の開始時期が、機関回転速度NEの高いときほど遅くなるようにしている。そのため、上記到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響を抑えることができる。
【0075】
(5)判定値AFaを、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にしてこの基準値から所定の変化幅Hの分だけリッチ側の値とするようにしている。従って、燃料カット中の検出空燃比のばらつきが上記到達時間CSに与える影響を抑えることができ、同到達時間CSの精度が向上するようになる。
【0076】
なお、上記各実施形態は、以下のように変更して実施することもできる。
・第1実施形態において変化量ΔAFを計測する期間(計測開始カウンタA、計測終了カウンタB)は適宜変更することができる。なお、変化量ΔAFを計測してから空燃比フィードバック制御を開始するまでの間における各種演算処理の時間を十分に確保するという観点では、燃料カットからの復帰後、変化量ΔAFを精度よく検出できる範囲内で可能な限り早い時期に同変化量ΔAFを計測することが望ましい。
【0077】
・第1実施形態では、変化量ΔAF、吸入空気量GA、及び機関回転速度NEに基づいてディレイカウンタDLYを設定するようにしたが、吸入空気量GAに基づくディレイカウンタDLYの設定や、機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。また、吸入空気量GA及び機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。
【0078】
・第2実施形態において判定値AFaを固定値にしてもよい。
・第2実施形態では、到達時間CS、吸入空気量GA、及び機関回転速度NEに基づいてディレイカウンタDLYを設定するようにしたが、吸入空気量GAに基づくディレイカウンタDLYの設定や、機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。また、吸入空気量GA及び機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。
【符号の説明】
【0079】
10…内燃機関、11…吸気通路、13…排気通路、14…エアクリーナ、15…スロットルバルブ、16…エアフロメータ、17…インジェクタ、18…触媒、19…空燃比センサ、20…酸素センサ、21…回転速度センサ、22…電子制御装置。
【技術分野】
【0001】
本発明は、内燃機関の空燃比制御装置に関するものである。
【背景技術】
【0002】
内燃機関では、排気通路に設けられた空燃比センサの出力値に基づいて空燃比のフィードバック制御が行われる。この空燃比フィードバック制御は、減速時などに行われる燃料カットの実行中には中止され、燃料カットから復帰すると再び開始される。
【0003】
ここで、実空燃比の変化に対する空燃比センサの出力変化の応答性は、同センサの劣化度合や活性度合に応じて変化する。そして、同センサの応答性が低下しているときには、燃料カットから復帰した後において、実空燃比の変化に対してセンサにて検出される検出空燃比の変化が遅れるため、実空燃比に対して検出空燃比はリーン側にずれる。このような状態のときに空燃比フィードバック制御が行われると、空燃比はリッチ側に過補正されてしまい、排気性能が悪化するおそれがある。
【0004】
このような空燃比センサの応答性低下による排気性能の悪化を抑えるために、特許文献1に記載の装置では、燃料カットから復帰した後、検出空燃比が所定の判定値に達してから空燃比フィードバック制御を開始するようにしており、さらにはその判定値を空燃比センサの応答性に応じて補正するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−189022号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記文献1に記載の装置では、空燃比センサの応答性に応じて上記判定値を補正するようにしているが、空燃比センサの応答性を把握するときには、空燃比フィードバック制御の実行中に目標空燃比を切り換えるようにしているため、機関運転に少なからず影響を与えてしまう。
【0007】
本発明は、上記実情に鑑みてなされたものであり、その目的は、機関運転に影響を与えることなく、空燃比センサの応答性に起因した排気性能の悪化を抑えることのできる内燃機関の空燃比制御装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段及びその作用効果について記載する。
請求項1に記載の発明は、排気通路に設けられた空燃比センサの出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する内燃機関の空燃比制御装置において、燃料カット復帰後に前記空燃比センサで検出される空燃比の変化速度に基づいて前記開始時期を可変設定することをその要旨とする。
【0009】
空燃比センサの応答性が低下しているときには、燃料カット復帰後に同センサで検出される空燃比の変化速度が遅くなる傾向がある。そこで、同構成では、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサで検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサの応答性の低下度合いに合わせて上記開始時期を設定することができる。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、同構成では、燃料カット復帰後に空燃比センサで検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0010】
このように同構成によれば、機関運転に影響を与えることなく、空燃比センサの応答性に起因した燃料カット復帰直後の排気性能の悪化を抑えることができるようになる。
空燃比の変化速度に基づいて上記開始時期を可変設定するに際して、その変化速度を示す値としては、請求項2に記載の発明によるように、燃料カット復帰後の所定期間に前記空燃比センサで検出される空燃比の変化量を計測する、という構成を採用することができる。
【0011】
そして、上述したように空燃比センサの応答性が低下しているときには、同センサで検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど上記開始時期を遅くする必要がある。そこで、空燃比の変化速度を示す値として、空燃比の上記変化量を計測する場合には、請求項3に記載の発明によるように、前記変化量が小さいときほど、つまり空燃比の変化速度が遅いときほど前記開始時期は遅くされる、という構成を採用することにより、空燃比フィードバック制御の開始時期を最適化できる。
【0012】
請求項4に記載の発明は、請求項3に記載の内燃機関の空燃比制御装置において、前記変化量に対応する前記開始時期は、吸入空気量が多いときほど遅くされることをその要旨とする。
【0013】
燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量が多いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量が多いときほど変化速度は速くなる。従って、空燃比の変化量は、吸入空気量が多いときほど空燃比センサの応答性に応じた変化量よりも大きくなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、空燃比の変化量に対応する上記開始時期は吸入空気量が多いときほど遅くされる。そのため、所定期間内における空燃比の変化量に基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量が開始時期に対して与える悪影響を抑えることができる。
【0014】
請求項5に記載の発明は、請求項3に記載の内燃機関の空燃比制御装置において、前記変化量に対応する前記開始時期は、機関回転速度が高いときほど遅くされることをその要旨とする。
【0015】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度が高いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度が高いときほど変化速度は速くなる。従って、空燃比の変化量は、機関回転速度が高いときほど空燃比センサの応答性に応じた変化量よりも大きくなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、空燃比の変化量に対応する上記開始時期は機関回転速度が高いときほど遅くされる。そのため、所定期間内における空燃比の変化量に基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度が開始時期に対して与える悪影響を抑えることができる。
【0016】
また、空燃比の変化速度に基づいて上記開始時期を可変設定するに際して、その変化速度を示す値としては、請求項6に記載の発明によるように、燃料カット復帰後に前記空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間を計測する、という構成を採用することもできる。
【0017】
そして、上述したように空燃比センサの応答性が低下しているときには、同センサで検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど上記開始時期を遅くする必要がある。そこで、空燃比の変化速度を示す値として上記到達時間を計測する場合には、請求項7に記載の発明によるように、前記到達時間が長いときほど、つまり空燃比の変化速度が遅いときほど前記開始時期は遅くされる、という構成を採用することにより、空燃比フィードバック制御の開始時期を最適化できる。
【0018】
請求項8に記載の発明は、請求項7に記載の内燃機関の空燃比制御装置において、前記到達時間に対応する前記開始時期は、吸入空気量が多いときほど遅くされることをその要旨とする。
【0019】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量が多いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量が多いときほど変化速度は速くなる。従って、上記到達時間は、吸入空気量が多いときほど空燃比センサの応答性に応じた到達時間よりも短くなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、上記到達時間に対応する上記開始時期は吸入空気量が多いときほど遅くされる。そのため、燃料カット復帰後に空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間に基づき、空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量が開始時期に対して与える悪影響を抑えることができる。
【0020】
請求項9に記載の発明は、請求項7に記載の内燃機関の空燃比制御装置において、前記到達時間に対応する前記開始時期は、機関回転速度が高いときほど遅くされることをその要旨とする。
【0021】
上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度が高いときほど速くなるため、空燃比センサで検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度が高いときほど変化速度は速くなる。従って、上記到達時間は、機関回転速度が高いときほど空燃比センサの応答性に応じた到達時間よりも短くなりやすく、上記開始時期が誤って早い時期に設定されてしまうおそれがある。この点、同構成によれば、上記到達時間に対応する上記開始時期は機関回転速度が高いときほど遅くされる。そのため、燃料カット復帰後に空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間に基づき、空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度が開始時期に対して与える悪影響を抑えることができる。
【0022】
請求項10に記載の発明は、請求項6〜9のいずれか1項に記載の内燃機関の空燃比制御装置において、前記判定値は、燃料カットからの復帰時に前記空燃比センサで検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が設定されることをその要旨とする。
【0023】
同構成によれば、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきに応じて判定値が変化するようになる。つまり、燃料カット中に空燃比センサで検出される空燃比がばらついていても、検出空燃比が上記判定値に達するまでの間の空燃比の変化幅は一定に維持される。従って、燃料カット中の検出空燃比のばらつきが上記到達時間に与える影響を抑えることができ、同到達時間の精度が向上するようになる。
【図面の簡単な説明】
【0024】
【図1】本発明にかかる内燃機関の空燃比制御装置を具体化した第1実施形態にあって、これが適用される内燃機関及びその周辺構造を示す模式図。
【図2】同実施形態における空燃比フィードバック許可処理の手順を示すフローチャート。
【図3】同実施形態における空燃比フィードバック許可処理の実行態様を示すタイミングチャート。
【図4】空燃比の変化量、吸入空気量、及びディレイカウンタの関係を示すグラフ。
【図5】空燃比の変化量、機関回転速度、及びディレイカウンタの関係を示すグラフ。
【図6】第2実施形態における空燃比フィードバック許可処理の手順を示すフローチャート。
【図7】同実施形態における空燃比フィードバック許可処理の実行態様を示すタイミングチャート。
【図8】到達時間、吸入空気量、及びディレイカウンタの関係を示すグラフ。
【図9】到達時間、機関回転速度、及びディレイカウンタの関係を示すグラフ。
【発明を実施するための形態】
【0025】
(第1実施形態)
以下、この発明にかかる内燃機関の空燃比制御装置を具体化した第1実施形態について、図1〜図5を参照して説明する。
【0026】
図1に示すように、内燃機関10には吸気通路11が接続されている。この吸気通路11には、通路面積を可変とするスロットルバルブ15が設けられており、その開度制御によりエアクリーナ14を通じて吸入される空気の量が調整される。また、吸入された空気の量(吸入空気量GA)は、エアフロメータ16にて検出される。そして吸気通路11に吸入された空気は、スロットルバルブ15の下流に設けられたインジェクタ17から噴射される燃料と混合された後、内燃機関10の燃焼室に送られて燃焼される。
【0027】
燃焼室での燃焼により生じた排気が送られる排気通路13には、排気中の成分を浄化する排気浄化用の触媒18が設けられている。この触媒18は、理論空燃比近傍での燃焼が行われる状態において、排気中のHCやCOを酸化するとともに同排気中のNOxを還元して排気を浄化する作用を有している。また、この触媒18は、これを通過する排気の空燃比が理論空燃比よりもリーンの時には排気中の酸素を吸蔵し、同空燃比が理論空燃比よりもリッチのときには吸蔵した酸素を放出するといった酸素ストレージ作用を有している。
【0028】
触媒18の上流側には空燃比センサ19が設けられている。また、触媒18の下流側には酸素センサ20が設けられている。
空燃比センサ19は、周知の限界電流式酸素センサである。この限界電流式酸素センサは、濃淡電池式酸素センサの検出部に拡散律速層と呼ばれるセラミック層を備えることにより排気中の酸素濃度に応じた出力電流が得られるセンサであり、排気中の酸素濃度と密接な関係にある空燃比が理論空燃比である場合には、その出力電流は「0」になる。また、空燃比がリッチになるにつれて出力電流は負の方向に大きくなり、空燃比がリーンになるにつれて出力電流は正の方向に大きくなる。従って、この空燃比センサ19の出力値に基づき、触媒18上流側の空燃比についてそのリーン度合いやリッチ度合いを検出することができる。
【0029】
また、酸素センサ20は、周知の濃淡電池式の酸素センサである。この濃淡電池式酸素センサの出力特性は、空燃比が理論空燃比よりもリッチのときには約1V程度の出力が得られ、空燃比が理論空燃比よりもリーンのときには約0V程度の出力が得られる。また、理論空燃比近傍でその出力電圧が大きく変化するようになっている。従って、この酸素センサ20の出力値に基づき、触媒18下流側の空燃比がリーンとなっているかリッチとなっているかを検出することができる。なお、本実施形態では、酸素センサ20の出力電圧が「0.45V」以上の場合に、空燃比は「リッチ」であると判定し、出力電圧が「0.45V」未満の場合には、空燃比が「リーン」であると判定される。また、この酸素センサ20は、触媒18での排気浄化作用の状態を監視するために同触媒18の下流側に設けられている。すなわち、空燃比センサ19の出力がリッチを示しているときに酸素センサ20の出力がリーンとなっているときには、触媒18から酸素が放出されており、同触媒18での酸化作用が促進されていることが把握される。一方、空燃比センサ19の出力がリーンを示しているときに酸素センサ20の出力がリッチとなっているときには、触媒18に酸素が吸蔵されており、同触媒18での還元作用が促進されていることが把握される。
【0030】
上記触媒18は、燃焼される混合気の空燃比が理論空燃比近傍の狭い範囲(ウインドウ)でのみ、排気中の主要有害成分(HC、CO、NOx)のすべてを酸化還元反応により効率的に浄化する。そうした触媒18を有効に機能させるには、混合気の空燃比を上記ウインドウの中心に合わせこむ、厳密な空燃比制御が必要となる。
【0031】
そうした空燃比の制御は、電子制御装置22により行われる。電子制御装置22には、上記エアフロメータ16や上記空燃比センサ19、酸素センサ20、アクセルペダルの操作量を検出するアクセルセンサ、あるいは機関回転速度NEを検出する回転速度センサ21を始めとする各種センサ類の検出信号が入力される。そしてそれらセンサ類の検出信号で把握される内燃機関10の運転状況に応じて、上記スロットルバルブ15やインジェクタ17等を駆動制御して上記空燃比制御を行っている。電子制御装置22による空燃比制御の概要は次の通りである。
【0032】
まず電子制御装置22は、上記アクセルペダルの操作量や機関回転速度の検出結果に応じて把握される吸入空気量の要求量を求め、それに応じた吸入空気量が得られるようにスロットルバルブ15の開度を調整する。その一方、エアフロメータ16により検出される吸入空気量の実測値に対して、理論空燃比が得られるだけの燃料量を求め、それによりインジェクタ17からの燃料噴射量を調整する。これにより、燃焼室で燃焼される混合気の空燃比を、ある程度に理論空燃比に近づけることはできる。ただし、それだけでは上記要求される高精度の空燃比制御には不十分である。
【0033】
そこで電子制御装置22は、上記空燃比センサ19の検出結果により、触媒18の上流側の空燃比についてその実測値を把握し、この実測値と目標空燃比、すなわち理論空燃比との乖離度合に基づいて算出される空燃比フィードバック補正量に基づいて、インジェクタ17の燃料噴射量をフィードバック補正している。この空燃比フィードバック制御により、要求される空燃比制御の精度が確保される。
【0034】
また、電子制御装置22は、上記酸素センサ20の検出結果より、触媒18の酸素吸蔵状態、あるいは酸素放出状態を推定し、この推定に基づいて上記空燃比フィードバック補正量に対する修正を行う。この修正処理では、酸素センサ20の出力に基づいて算出されるサブフィードバック補正量SFBが増減補正され、同サブフィードバック補正量SFBによって上記空燃比フィードバック補正量は修正される。具体的には、酸素センサ20の出力がリッチを示している間は、触媒18上流側の空燃比が一定量ずつリーン寄りに変化するように、すなわち触媒18上流側の空燃比が少しずつリーン側に近づいていくように、サブフィードバック補正量SFBが一定量ずつマイナス側に増大される。一方、酸素センサ20の出力がリーンを示している間は、触媒18上流側の空燃比が一定量ずつリッチ寄りに変化するように、すなわち触媒18上流側の空燃比が少しずつリッチ側に近づいていくように、サブフィードバック補正量SFBが一定量ずつプラス側に増大される。このようなサブフィードバック制御により、触媒18の浄化作用が有効に活用される。
【0035】
また、内燃機関10では、減速時などにおいて、インジェクタ17からの燃料噴射を中止する、いわゆる燃料カットが実行される。この燃料カットが実行されると、排気通路13には新気が導入されるため、空燃比センサ19の検出空燃比はリーンを示す。また、燃料カット実行中には、上記空燃比フィードバック制御は中止される。そして、燃料カットが中止されて再び燃料噴射が開始される、いわゆる燃料カットの復帰が行われると、混合気の燃焼ガスが排気通路13に導入されるため、空燃比センサ19の検出空燃比はリーンからリッチ側に変化していく。
【0036】
ここで、上述したように、実空燃比の変化に対する空燃比センサ19の出力変化の応答性は、同センサ19の劣化度合や活性度合に応じて変化する。そして、同センサ19の応答性が低下しているときには、燃料カットから復帰した後において、実空燃比の変化に対して空燃比センサ19の検出空燃比の変化が遅れるため、実空燃比に対して検出空燃比はリーン側にずれる。このような状態のときに空燃比フィードバック制御が再開されると、実際の空燃比はリッチ側に過補正されてしまい、排気性能が悪化するおそれがある。
【0037】
そこで本実施形態では、燃料カット復帰後に再開される空燃比フィードバック制御についてその開始時期を、空燃比センサ19の応答性に合わせて可変設定するようにしている。
【0038】
以下、燃料カット(FC)復帰後における空燃比フィードバック制御(空燃比FB制御)の再開可否についてこれを判定する処理であって、空燃比FB制御の開始時期を可変設定する空燃比FB許可処理の手順を説明する。なお、図2に示す本処理は、燃料カットからの復帰直後に電子制御装置22によって実行される。また、この空燃比FB許可処理の実行に伴う各パラメータの変化態様を図3に示す。
【0039】
図2に示すように、本処理が開始されるとまず、ガス到達カウンタGCが判定値αに達するまでステップS100での判定が繰り返し行われる。このガス到達カウンタGCは、図3に示すように、燃料カットの実行が中止されて燃料噴射が再開された時点で(時刻t1)その計測が開始される。そして、ガス到達カウンタGCが判定値αに達すると(S100:YES、図3の時刻t2)、燃料カットの復帰に伴って発生した燃焼ガスが空燃比センサ19に到達した、つまり空燃比センサ19の周囲は新気から燃焼ガスに変化したと判断されて、応答遅れカウンタDCの計測が開始される(S110、図3の時刻t2)。
【0040】
次に、応答遅れカウンタDCが計測開始カウンタAに達するまで、ステップS120での判定が繰り返し行われる。この計測開始カウンタAは、図3に示すように、燃料カットからの復帰に伴い、それまでリーンであった検出空燃比がリッチ側に変化し始めた時期(時刻t2)から若干経過した時期(時刻t3)であって、検出空燃比の変化量が比較的大きくなり始める時期に相当する値となっている。
【0041】
そして、応答遅れカウンタDCが計測開始カウンタAに達すると(S120:YES、図3の時刻t3)、現在、空燃比センサ19で検出されている検出空燃比が第1空燃比AF1として、電子制御装置22のメモリに記憶される。
【0042】
次に、応答遅れカウンタDCが計測終了カウンタBに達するまで、ステップS140での判定が繰り返し行われる。この計測終了カウンタBは、図3に示すように、応答遅れカウンタDCが計測開始カウンタAに達した時期(時刻t3)から所定期間経過した後の時期(時刻t4)に相当する値であって、時刻t3からの検出空燃比の変化量を十分に計測可能な時期に相当する値が設定されている。
【0043】
そして、応答遅れカウンタDCが計測終了カウンタBに達すると(S140:YES、図3の時刻t4)、現在、空燃比センサ19で検出されている検出空燃比が第2空燃比AF2として、電子制御装置22のメモリに記憶される。
【0044】
次に、第2空燃比AF2から第1空燃比AF1を減じることにより、応答遅れカウンタDCが計測開始カウンタAに達してから計測終了カウンタBに達するまでの間の期間内における空燃比の変化量ΔAFが算出される(S160)。
【0045】
そして、変化量ΔAF、現在の吸入空気量GA、現在の機関回転速度NEに基づいてディレイカウンタDLYが設定される(S170)。図4に示すように、このディレイカウンタDLYは、変化量ΔAFが小さいときほど大きい値に設定される。また、変化量ΔAFが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値に設定される。また、図5に示すように、変化量ΔAFが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値に設定される。
【0046】
こうしてディレイカウンタDLYが設定されると、応答遅れカウンタDCがディレイカウンタDLY以上になったか否かが判定される(S180)。そして、応答遅れカウンタDCがディレイカウンタDLY未満のときには(S180:NO)、応答遅れカウンタDCがディレイカウンタDLY以上になるまで、空燃比フィードバック制御の実行が不許可とされる(S200)。
【0047】
一方、応答遅れカウンタDCがディレイカウンタDLY以上になると(S180:YES、図3の時刻t5)、空燃比フィードバック制御の実行が許可されて(S190)、本処理は終了される。このように空燃比フィードバック制御の実行が許可されると、他の実行不許可条件(例えば空燃比センサ19の不活性化による実行不許可など)が成立していない限り、空燃比フィードバック制御が開始される(図3の時刻t5以降)。
【0048】
次に、本実施形態の作用を説明する。
空燃比センサ19の応答性が低下しているときには、燃料カット復帰後に同センサ19で検出される空燃比の変化速度が遅くなる傾向がある。この変化速度が遅いときには、所定期間内における空燃比の変化量が小さくなるため、変化速度を示す値として所定期間内における空燃比の変化量を利用することができる。
【0049】
そこで、本実施形態では、可変とされるディレイカウンタDLYを設定し、燃料カット復帰後の空燃比フィードバック制御の開始は、応答遅れカウンタDCがディレイカウンタDLYに達してから開始するようにしている。つまりディレイカウンタDLYを可変設定することで空燃比フィードバック制御の開始時期を可変設定するようにしているが、そのディレイカウンタDLYを、所定期間(応答遅れカウンタDCが計測開始カウンタAに達してから計測終了カウンタBに達するまでの間の期間)における検出空燃比の変化量ΔAFに基づいて可変設定するようにしている。換言すれば、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサ19の応答性の低下度合いに合わせて、空燃比フィードバック制御の開始時期が設定される。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、上述したような空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、本実施形態では、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0050】
また、上述したように空燃比センサ19の応答性が低下しているときには、同センサ19で検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど空燃比フィードバック制御の開始時期を遅くする必要がある。そこで、先の図4や図5に示したように、変化量ΔAFが小さいときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYの値を大きくすることにより、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期が最適化される。
【0051】
また、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量GAが多いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量GAが多いときほど変化速度は速くなる。従って、空燃比の変化量ΔAFは、吸入空気量GAが多いときほど空燃比センサ19の応答性に応じた変化量よりも大きくなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図4に示したように、変化量ΔAFが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、空燃比の変化量ΔAFに対応するディレイカウンタDLYは、吸入空気量GAが多いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は吸入空気量GAが多いときほど遅くされる。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響が抑えられる。
【0052】
また、上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度NEが高いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度NEが高いときほど変化速度は速くなる。従って、空燃比の変化量ΔAFは、機関回転速度NEが高いときほど空燃比センサ19の応答性に応じた変化量よりも大きくなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図5に示したように、変化量ΔAFが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、空燃比の変化量ΔAFに対応するディレイカウンタDLYは、機関回転速度NEが高いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は機関回転速度NEが高いときほど遅くされる。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響が抑えられる。
【0053】
以上説明したように、本実施形態によれば、以下の効果を得ることができる。
(1)燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、より詳細には燃料カット復帰後の所定期間内に空燃比センサ19で検出される空燃比の変化量ΔAFに基づき、空燃比フィードバック制御の開始時期を可変設定するようにしている。従って、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化を抑えることができる。さらに、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0054】
(2)空燃比の変化量ΔAFが小さいときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYを大きくすることで、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期を最適化できる。
【0055】
(3)空燃比の変化量ΔAFに対応するディレイカウンタDLYを吸入空気量GAが多いときほど大きくすることで、空燃比の変化量ΔAFに対応する空燃比フィードバック制御の開始時期が、吸入空気量GAの多いときほど遅くなるようにしている。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響を抑えることができる。
【0056】
(4)空燃比の変化量ΔAFに対応するディレイカウンタDLYを機関回転速度NEが高いときほど大きくすることで、空燃比の変化量ΔAFに対応する空燃比フィードバック制御の開始時期が、機関回転速度NEの高いときほど遅くなるようにしている。そのため、所定期間内における空燃比の変化量ΔAFに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響を抑えることができる。
(第2実施形態)
次に、この発明にかかる内燃機関の空燃比制御装置を具体化した第2実施形態について、図6〜図9を参照して説明する。
【0057】
第1実施形態では、空燃比の変化速度を示す値として、燃料カット復帰後の所定期間に空燃比センサ19で検出される空燃比の変化量ΔAFを計測するようにした。これに代えて、本実施形態では、空燃比の変化速度を示す値として、燃料カット復帰後に空燃比センサ19で検出される空燃比が所定の判定値AFaに達するまでの到達時間CSを計測するようにしている。そして、この到達時間CSに基づいて上記ディレイカウンタDLYを設定するようにしており、空燃比FB許可処理の一部が異なっている。そこで以下では、第1実施形態との相異点を中心にして、本実施形態にかかる空燃比制御装置を説明する。
【0058】
なお、図6に示す本実施形態の空燃比FB許可処理も、燃料カットからの復帰直後に電子制御装置22によって実行される。また、この空燃比FB許可処理の実行に伴う各パラメータの変化態様を図7に示す。
【0059】
図6に示すように、本処理が開始されるとまず、ガス到達カウンタGCが判定値αに達するまでステップS300での判定が繰り返し行われる。このガス到達カウンタGCも、図7に示すように、燃料カットの実行が中止されて燃料噴射が再開された時点で(時刻t1)その計測が開始される。そして、ガス到達カウンタGCが判定値αに達すると(S300:YES、図7の時刻t2)、燃料カットの復帰に伴って発生した燃焼ガスが空燃比センサ19に到達した、つまり空燃比センサ19の周囲は新気から燃焼ガスに変化したと判断されて、応答遅れカウンタDCの計測が開始される(S310、図7の時刻t2)。
【0060】
次に空燃比センサ19の検出空燃比が判定値AFaに達するまで、ステップS320での判定が繰り返し行われる。この判定値AFaは、本処理が実行される毎に以下のようにして算出される。すなわち、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が判定値AFaとして設定される。より詳細には、図7に示すように、時刻t1にて燃料カットから復帰したときに空燃比センサ19で検出された検出空燃比AFを基準値として取り込み、この取り込んだ基準値から予め定められた変化幅Hの分だけリッチ側の値が判定値AFaとして算出される。
【0061】
そして、検出空燃比が判定値AFaに達すると(S320:YES、図7の時刻t3)、燃料カット復帰後の検出空燃比がリーンからある程度リッチ側に変化しており、後述のディレイカウンタDLYを設定するのに十分な程度に検出空燃比は変化したと判断される。そして、現在の応答遅れカウンタDCが上記到達時間CSとして設定される(S330)。
【0062】
次に、到達時間CS、現在の吸入空気量GA、現在の機関回転速度NEに基づいてディレイカウンタDLYが設定される(S340)。図8に示すように、このディレイカウンタDLYは、到達時間CSが長いときほど大きい値に設定される。また、到達時間CSが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値に設定される。また、図9に示すように、到達時間CSが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値に設定される。
【0063】
こうしてディレイカウンタDLYが設定されると、応答遅れカウンタDCがディレイカウンタDLY以上になったか否かが判定される(S350)。そして、応答遅れカウンタDCがディレイカウンタDLY未満のときには(S350:NO)、応答遅れカウンタDCがディレイカウンタDLY以上になるまで、空燃比フィードバック制御の実行が不許可とされる(S370)。
【0064】
一方、応答遅れカウンタDCがディレイカウンタDLY以上になると(S350:YES、図7の時刻t4)、空燃比フィードバック制御の実行が許可されて(S360)、本処理は終了される。このように空燃比フィードバック制御の実行が許可されると、他の実行不許可条件(例えば空燃比センサ19の不活性化による実行不許可など)が成立していない限り、空燃比フィードバック制御が開始される(図7の時刻t4以降)。
【0065】
次に、本実施形態の作用を説明する。
上述したように空燃比センサ19の応答性が低下しているときには、燃料カット復帰後に同センサ19で検出される空燃比の変化速度が遅くなる傾向がある。この変化速度が遅いときには上記到達時間CSが長くなるため、変化速度を示す値として、燃料カット復帰後に空燃比センサ19で検出される空燃比が所定の判定値AFaに達するまでの上記到達時間CSを利用することができる。
【0066】
そこで、本実施形態では、可変とされるディレイカウンタDLYを設定し、燃料カット復帰後の空燃比フィードバック制御の開始は、応答遅れカウンタDCがディレイカウンタDLYに達してから開始するようにしている。つまりディレイカウンタDLYを可変設定することで空燃比フィードバック制御の開始時期を可変設定するようにしているが、そのディレイカウンタDLYを、上記到達時間CSに基づいて可変設定するようにしている。換言すれば、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づいて可変設定するようにしている。従って、空燃比センサ19の応答性の低下度合いに合わせて、空燃比フィードバック制御の開始時期が設定される。つまり、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、上述したような空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化が抑えられる。そして、本実施形態でも、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0067】
また、上述したように空燃比センサ19の応答性が低下しているときには、同センサ19で検出される空燃比の変化速度が遅くなる傾向があり、空燃比の変化速度が遅いときほど空燃比フィードバック制御の開始時期を遅くする必要がある。そこで、先の図8や図9に示したように、到達時間CSが長いときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYの値を大きくすることにより、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期が最適化される。
【0068】
また、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は吸入空気量GAが多いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ吸入空気量GAが多いときほど変化速度は速くなる。従って、到達時間CSは、吸入空気量GAが多いときほど、空燃比センサ19の応答性に応じた到達時間よりも短くなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図8に示したように、到達時間CSが同一であっても、吸入空気量GAが多いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、到達時間CSに対応するディレイカウンタDLYは、吸入空気量GAが多いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は吸入空気量GAが多いときほど遅くされる。そのため、到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響が抑えられる。
【0069】
また、上述したように、燃料カット復帰後は、復帰前までリーンとなっていた排気通路13内の実空燃比がリッチ側に変化していく。この実空燃比の変化速度は機関回転速度NEが高いときほど速くなるため、空燃比センサ19で検出される検出空燃比も、実空燃比の変化に対して応答遅れはあるにせよ機関回転速度NEが高いときほど変化速度は速くなる。従って、到達時間CSは、機関回転速度NEが高いときほど空燃比センサ19の応答性に応じた到達時間よりも短くなりやすく、空燃比フィードバック制御の開始時期が誤って早い時期に設定されてしまうおそれがある。そこで本実施形態では、先の図9に示したように、到達時間CSが同一であっても、機関回転速度NEが高いときほどディレイカウンタDLYは大きい値となるように設定している。つまり、到達時間CSに対応するディレイカウンタDLYは、機関回転速度NEが高いときほど大きい値にされることにより、空燃比フィードバック制御の開始時期は機関回転速度NEが高いときほど遅くされる。そのため、到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響が抑えられる。
【0070】
また、上記判定値AFaを仮に固定値とした場合には、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきの影響で検出空燃比が判定値AFaに達するまでの時間、つまり上記到達時間CSが変化してしまう。この点、本実施形態では、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にして、この基準値から所定の変化幅Hの分だけリッチ側の値を判定値AFaとして設定するようにしている。従って、燃料カット中の検出空燃比にばらつきがある場合、そのばらつきに応じて判定値AFaが変化する。つまり、燃料カット中に空燃比センサ19で検出される空燃比がばらついていても、検出空燃比が上記判定値AFaに達するまでの間の空燃比の変化幅Hは一定に維持される。従って、燃料カット中の検出空燃比のばらつきが上記到達時間CSに与える影響を抑えることができ、同到達時間CSの精度が向上するようになる。
【0071】
以上説明したように、本実施形態によれば、以下の効果を得ることができる。
(1)燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度に基づき、より詳細には燃料カット復帰後に空燃比センサ19で検出される空燃比が判定値AFaに達するまでの到達時間CSに基づき、空燃比フィードバック制御の開始時期を可変設定するようにしている。従って、燃料カットから復帰した後、実空燃比に対して検出空燃比のずれが小さくなってから空燃比フィードバック制御を開始することができるようになるため、空燃比の過補正が抑えられ、これにより燃料カット復帰直後での排気性能の悪化を抑えることができる。さらに、燃料カット復帰後に空燃比センサ19で検出される空燃比の変化速度を利用するようにしているため、排気性能の悪化を抑えるに際して機関運転に影響を与えることもない。
【0072】
(2)上記到達時間CSが長いときほど、つまり空燃比の変化速度が遅いときほどディレイカウンタDLYを大きくすることで、空燃比フィードバック制御の開始時期を遅くするようにしており、これにより空燃比フィードバック制御の開始時期を最適化できる。
【0073】
(3)上記到達時間CSに対応するディレイカウンタDLYを吸入空気量GAが多いときほど大きくすることで、到達時間CSに対応する空燃比フィードバック制御の開始時期が、吸入空気量GAの多いときほど遅くなるようにしている。そのため、上記到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、吸入空気量GAが同開始時期に対して与える悪影響を抑えることができる。
【0074】
(4)上記到達時間CSに対応するディレイカウンタDLYを機関回転速度NEが高いときほど大きくすることで、到達時間CSに対応する空燃比フィードバック制御の開始時期が、機関回転速度NEの高いときほど遅くなるようにしている。そのため、上記到達時間CSに基づいて空燃比フィードバック制御の開始時期を可変設定するに際して、機関回転速度NEが同開始時期に対して与える悪影響を抑えることができる。
【0075】
(5)判定値AFaを、燃料カットからの復帰時に空燃比センサ19で検出された空燃比を基準値にしてこの基準値から所定の変化幅Hの分だけリッチ側の値とするようにしている。従って、燃料カット中の検出空燃比のばらつきが上記到達時間CSに与える影響を抑えることができ、同到達時間CSの精度が向上するようになる。
【0076】
なお、上記各実施形態は、以下のように変更して実施することもできる。
・第1実施形態において変化量ΔAFを計測する期間(計測開始カウンタA、計測終了カウンタB)は適宜変更することができる。なお、変化量ΔAFを計測してから空燃比フィードバック制御を開始するまでの間における各種演算処理の時間を十分に確保するという観点では、燃料カットからの復帰後、変化量ΔAFを精度よく検出できる範囲内で可能な限り早い時期に同変化量ΔAFを計測することが望ましい。
【0077】
・第1実施形態では、変化量ΔAF、吸入空気量GA、及び機関回転速度NEに基づいてディレイカウンタDLYを設定するようにしたが、吸入空気量GAに基づくディレイカウンタDLYの設定や、機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。また、吸入空気量GA及び機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。
【0078】
・第2実施形態において判定値AFaを固定値にしてもよい。
・第2実施形態では、到達時間CS、吸入空気量GA、及び機関回転速度NEに基づいてディレイカウンタDLYを設定するようにしたが、吸入空気量GAに基づくディレイカウンタDLYの設定や、機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。また、吸入空気量GA及び機関回転速度NEに基づくディレイカウンタDLYの設定を省略してもよい。
【符号の説明】
【0079】
10…内燃機関、11…吸気通路、13…排気通路、14…エアクリーナ、15…スロットルバルブ、16…エアフロメータ、17…インジェクタ、18…触媒、19…空燃比センサ、20…酸素センサ、21…回転速度センサ、22…電子制御装置。
【特許請求の範囲】
【請求項1】
排気通路に設けられた空燃比センサの出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する内燃機関の空燃比制御装置において、
燃料カット復帰後に前記空燃比センサで検出される空燃比の変化速度に基づいて前記開始時期を可変設定する
ことを特徴とする内燃機関の空燃比制御装置。
【請求項2】
前記変化速度を示す値として、燃料カット復帰後の所定期間に前記空燃比センサで検出される空燃比の変化量を計測する
請求項1に記載の内燃機関の空燃比制御装置。
【請求項3】
前記変化量が小さいときほど前記開始時期は遅くされる
請求項2に記載の内燃機関の空燃比制御装置。
【請求項4】
前記変化量に対応する前記開始時期は、吸入空気量が多いときほど遅くされる
請求項3に記載の内燃機関の空燃比制御装置。
【請求項5】
前記変化量に対応する前記開始時期は、機関回転速度が高いときほど遅くされる
請求項3に記載の内燃機関の空燃比制御装置。
【請求項6】
前記変化速度を示す値として、燃料カット復帰後に前記空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間を計測する
請求項1に記載の内燃機関の空燃比制御装置。
【請求項7】
前記到達時間が長いときほど前記開始時期は遅くされる
請求項6に記載の内燃機関の空燃比制御装置。
【請求項8】
前記到達時間に対応する前記開始時期は、吸入空気量が多いときほど遅くされる
請求項7に記載の内燃機関の空燃比制御装置。
【請求項9】
前記到達時間に対応する前記開始時期は、機関回転速度が高いときほど遅くされる
請求項7に記載の内燃機関の空燃比制御装置。
【請求項10】
前記判定値は、燃料カットからの復帰時に前記空燃比センサで検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が設定される
請求項6〜9のいずれか1項に記載の内燃機関の空燃比制御装置。
【請求項1】
排気通路に設けられた空燃比センサの出力値に基づいて空燃比フィードバック制御を行うとともに、燃料カットから復帰した後の空燃比フィードバック制御の開始時期を可変設定する内燃機関の空燃比制御装置において、
燃料カット復帰後に前記空燃比センサで検出される空燃比の変化速度に基づいて前記開始時期を可変設定する
ことを特徴とする内燃機関の空燃比制御装置。
【請求項2】
前記変化速度を示す値として、燃料カット復帰後の所定期間に前記空燃比センサで検出される空燃比の変化量を計測する
請求項1に記載の内燃機関の空燃比制御装置。
【請求項3】
前記変化量が小さいときほど前記開始時期は遅くされる
請求項2に記載の内燃機関の空燃比制御装置。
【請求項4】
前記変化量に対応する前記開始時期は、吸入空気量が多いときほど遅くされる
請求項3に記載の内燃機関の空燃比制御装置。
【請求項5】
前記変化量に対応する前記開始時期は、機関回転速度が高いときほど遅くされる
請求項3に記載の内燃機関の空燃比制御装置。
【請求項6】
前記変化速度を示す値として、燃料カット復帰後に前記空燃比センサで検出される空燃比が所定の判定値に達するまでの到達時間を計測する
請求項1に記載の内燃機関の空燃比制御装置。
【請求項7】
前記到達時間が長いときほど前記開始時期は遅くされる
請求項6に記載の内燃機関の空燃比制御装置。
【請求項8】
前記到達時間に対応する前記開始時期は、吸入空気量が多いときほど遅くされる
請求項7に記載の内燃機関の空燃比制御装置。
【請求項9】
前記到達時間に対応する前記開始時期は、機関回転速度が高いときほど遅くされる
請求項7に記載の内燃機関の空燃比制御装置。
【請求項10】
前記判定値は、燃料カットからの復帰時に前記空燃比センサで検出された空燃比を基準値にして、この基準値から所定値だけリッチ側の値が設定される
請求項6〜9のいずれか1項に記載の内燃機関の空燃比制御装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−36439(P2013−36439A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−175190(P2011−175190)
【出願日】平成23年8月10日(2011.8.10)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月10日(2011.8.10)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]