
内燃機関システムの制御方法および内燃機関システム
【課題】吸気弁の閉弁時期を早閉じ範囲と遅閉じ範囲とに設定し、該閉弁時期の遅閉じ範囲から早閉じ範囲への移行中にスロットル弁を絞る場合に、開き気味のスロットル弁開度に設定することができるようにして、ポンプ損失を出来る限り低減する。
【解決手段】内燃機関の要求トルクが、第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、前記可能性が所定レベルよりも低いと判定したとき(ステップS66の判定がNOであるとき)、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動するようにし(ステップS68の進角遷移モードMTR-Aにし)、前記可能性が前記所定レベル以上であると判定したとき(ステップS66の判定がYESであるとき)、吸気弁の閉弁時期が遅閉じ範囲に留まるようにする。
【解決手段】内燃機関の要求トルクが、第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、前記可能性が所定レベルよりも低いと判定したとき(ステップS66の判定がNOであるとき)、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動するようにし(ステップS68の進角遷移モードMTR-Aにし)、前記可能性が前記所定レベル以上であると判定したとき(ステップS66の判定がYESであるとき)、吸気弁の閉弁時期が遅閉じ範囲に留まるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関、スロットル弁および吸気閉弁時期可変機構を備えた内燃機関システムの制御方法およびその内燃機関システムに関する技術分野に属する。
【背景技術】
【0002】
従来より、例えば特許文献1に示されているように、吸気弁のリフト量を目標空気充填量の増大に応じて大きくし、これに伴ない吸気弁の閉弁時期(吸気閉弁時期ともいう)を遅らせることで、気筒空気量を制御するようにすることが知られている。これにより、スロットル弁による空気量制御により生じるポンプ損失を抑制して、機関運転効率を向上させることができるようになる。
【0003】
一方、機関運転効率を高めるために、膨張比を高めることが知られている。膨張比を高めると、必然的に圧縮比が高くなる。そのため、高負荷低速領域において、異常燃焼が発生しやすくなる。この異常燃焼を防止するためには、気筒空気充填量を低下させることが有効である。そこで、例えば特許文献2に示されているように、有効圧縮比を低下させれば、ポンプ損失を増大することなしに空気充填量を低下させることができる。この有効圧縮比を低下させるには、吸気閉弁時期を、当該機関速度において空気充填量が最大となる時期に対して進角側または遅角側に離間させることで達成される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−264804号公報
【特許文献2】特開2001−159348号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、高負荷低速領域からは、通常、高負荷中速領域へと短期間に移行する。それに伴ない、空気充填量が最大となる吸気閉弁時期が高速で遅角する。これに対応して、高負荷低速領域に移行した時点で予め、吸気閉弁時期を遅らせることで、機関の加速性能を高く保つことが可能となる。
【0006】
従って、有効圧縮比を低下させるべく、低負荷から中負荷にかけての低速領域では、空気充填量が最大となる吸気閉弁時期よりも進角側に設定される早閉じ範囲内で、目標吸気量の増大に応じて遅角する時期に吸気弁を閉じる一方、高負荷低速領域では、空気充填量が最大となる吸気閉弁時期よりも遅角側に設定され且つ前記早閉じ範囲から離間した遅閉じ範囲内で、吸気弁を閉じるようにすることが望ましい。これにより、要求空気量が大きく変化すると、互いに離間した早閉じ範囲と遅閉じ範囲との間を、吸気閉弁時期が移行することになる。
【0007】
ここで、吸気弁は、一般的には、クランクシャフトにより駆動されて開閉する。すなわち、吸気弁の開閉駆動は、クランクシャフトに同期して回転するカムシャフト等のシャフトを介して行われる。このような動弁機構において、吸気閉弁時期を変化させるためには、連続的に変化させることが不可避となる。このため、吸気閉弁時期を、早閉じ範囲と遅閉じ範囲との間で移行させるには、その両範囲の間を連続的に変化させて移行する必要があり、この結果、その移行時に、空気充填量が最大となる時期になる瞬間が生じる。このとき、空気充填量が過剰となるので、それを防止するために、スロットル弁を絞ることによって、吸気圧を低下させることが考えられる。
【0008】
しかしながら、例えば車輪(駆動輪)のスリップによりトラクションコントロールが作動して要求トルクが低下して、吸気閉弁時期を遅閉じ範囲から早閉じ範囲へ移行する場合には問題が生じる。すなわち、遅閉じ範囲から早閉じ範囲への移行中に、車輪のグリップ力の回復により車輪スリップ量が急激に減少して機関速度が急低下する可能性があり、このように機関速度が低下すると、スロットル弁による吸気絞り効果が低下するため、吸気圧が充分に低下しなくなる可能性がある。このため、遅閉じ範囲から早閉じ範囲への移行時においては、気筒空気充填量の過剰による異常燃焼の発生を確実に防止するべく、スロットル弁をより絞り気味にして、その絞り気味のスロットル弁開度を前提にして、制御パラメータを設定する必要が生じる。この結果、ポンプ損失が増大して、機関運転効率を低下させる可能性がある。
【0009】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、吸気弁の閉弁時期を早閉じ範囲と遅閉じ範囲とに設定し、該閉弁時期の遅閉じ範囲から早閉じ範囲への移行中にスロットル弁を絞る場合に、開き気味のスロットル弁開度に設定することができるようにして、ポンプ損失を出来る限り低減しようとすることにある。
【課題を解決するための手段】
【0010】
前記の目的を達成するために、本発明では、往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、を備えた内燃機関システムの制御方法を対象として、前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁を閉じる工程と、前記要求トルクが、前記第1所定トルクよりも小さいときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁を閉じる工程と、前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定する工程と、前記可能性が所定レベルよりも低いと判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行するように前記吸気閉弁時期可変機構を制御するとともに、前記スロットル弁を一時的に閉方向に駆動する工程と、前記可能性が前記所定レベル以上であると判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御する工程と、を備えるようにした。
【0011】
このことにより、内燃機関の要求トルクが、第1所定トルク以上である状態から第2所定トルクを超えて低下する際、機関速度が所定量以上低下する可能性が判定され、その可能性が所定レベル以上であると判定されたときには、吸気弁の閉弁時期(吸気閉弁時期)が遅閉じ範囲に留まり、前記可能性が所定レベルよりも低いと判定されたときにのみ、吸気閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し、この移行時にスロットル弁が一時的に閉方向に作動する。これにより、スロットル弁の一時的閉作動制御中に機関速度が所定量以上低下する可能性は低くなり、スロットル弁による吸気絞り効果の低下により気筒空気充填量が過剰になる虞れを排除することができる。従って、要求トルクの低下に伴う吸気閉弁時期の遅閉じ範囲から早閉じ範囲への移行時に、開き気味のスロットル弁開度を前提として、制御パラメータ(スロットル弁開度や吸気閉弁時期等)の設定を行なうことが可能となる。よって、ポンプ損失を低減することができて、機関運転効率を高く保つことが可能となる。
【0012】
前記可能性を判定する工程は、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の低下量が大きいほど、前記可能性が高いと判定する工程である、ことが好ましい。
【0013】
これにより、要求トルクの低下量が大きいほど、機関速度が所定量以上低下する可能性が高くなって、吸気閉弁時期の遅閉じ範囲から早閉じ範囲への移行が制限される。特にトラクションコントロールの場合には、要求トルクの低下量が大きいほど、機関速度の低下量が大きくなるので、スロットル弁による吸気絞り効果の低下により気筒空気充填量が過剰になるのを適切に抑制することができる。
【0014】
前記所定レベルは、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の機関速度が高いほど、高く設定されていることが好ましい。
【0015】
このことで、吸気流速に比例した絞り効果の低下による気筒空気充填量の増大に適切に対応することが可能になる。
【0016】
前記内燃機関からの動力が伝達される車輪のスリップ量が所定値以上である際に、該内燃機関の要求トルクを低下させる工程を更に備えていてもよい。
【0017】
このようなトラクションコントロールの作動による要求トルクの低下時には、該低下により機関速度が低下することが予測される。この機関速度の低下量は、車輪スリップ量などから容易に予測することができ、機関速度が所定量以上低下する可能性を容易に判定することができる。
【0018】
本発明の別の態様は、往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記スロットル弁を駆動するスロットルアクチュエータと、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、前記スロットルアクチュエータおよび前記吸気閉弁時期可変機構を制御する制御器と、を備えた内燃機関システムであり、前記制御器は、前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、前記要求トルクが、前記第1所定トルクよりも小さいときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、且つ、前記可能性が所定レベルよりも低いと判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行し且つ前記スロットル弁が一時的に閉方向に作動するように前記吸気閉弁時期可変機構および前記スロットルアクチュエータを制御し、且つ、前記可能性が前記所定レベル以上であると判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御するものであるとする。
【0019】
この構成により、前記内燃機関システムの制御方法と同様の作用効果が得られる。
【発明の効果】
【0020】
以上説明したように、本発明の内燃機関システムの制御方法および内燃機関システムによると、内燃機関の要求トルクが、第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、前記可能性が所定レベルよりも低いと判定したときに、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動するようにし、前記可能性が前記所定レベル以上であると判定したときに、吸気弁の閉弁時期が遅閉じ範囲に留まるようにしたことにより、スロットル弁の一時的閉作動制御中に機関速度が低下する可能性は低くなり、吸気弁の閉弁時期の遅閉じ範囲から早閉じ範囲への移行時に、開き気味のスロットル弁開度を前提として、制御パラメータの設定を行なうことが可能となり、よって、ポンプ損失を低減することができて、高い機関運転効率を維持することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る内燃機関システムの概略構成図である。
【図2】前記内燃機関システムにおけるエンジンから車輪までの動力伝達装置を概略的に示す平面図である。
【図3】図1の実施形態に係る吸気弁駆動機構の具体的な構成を示す斜視図である。
【図4】前記吸気弁駆動機構の要部を示す断面図であり、(A)は大リフト制御状態においてバルブリフト量が0のときを示し、(B)は大リフト制御状態においてバルブリフト量が最大のときを示し、(C)は小リフト制御状態においてバルブリフト量が0のときを示し、(D)は小リフト制御状態においてバルブリフト量が最大のときを示す。
【図5】前記吸気弁駆動機構の設定例を示す図である。
【図6】制御ユニットによるエンジンの制御例を示すフローチャートである。
【図7】制御ユニットによるエンジンの制御例を示すフローチャートである。
【図8】図6のフローチャートにおいて運転領域を判定するための制御マップの例を示す特性図である。
【図9】図6のフローチャートによって設定される早閉じモードでの吸気弁閉タイミング(吸気弁の閉弁時期)の制御例を示す図である。
【図10】図6のフローチャートによって設定される早閉じモードでのスロットル開度の制御例を示す図である。
【図11】図6のフローチャートによる遅角遷移モードでの制御例を示すタイミングチャートである。
【図12】図7のフローチャートによって設定される遅閉じモードでの吸気弁閉タイミング(吸気弁の閉弁時期)の制御例を示す図であり、(A)はスロットル開度を並行して制御する場合を示し、(B)はスロットル開度を一定に維持する場合を示す。
【図13】図7のフローチャートによって設定される遅閉じモードでのスロットル開度の制御例を示す図であり、(A)はスロットル開度を並行して制御する場合を示し、(B)はスロットル開度を一定に維持する場合を示す。
【図14】図7のフローチャートによる進角遷移モードでの制御例を示すタイミングチャートである。
【図15】図6および図7のフローチャートを実行した制御例を示す吸気弁閉タイミング(吸気弁の閉弁時期)と目標空気充填量との関係のグラフであり、(A)は遅閉じモードでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合を示し、(B)は遅閉じモードでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合を示す。
【図16】エンジン回転速度(機関速度)に対する所定の機関速度低下量ΔNENG1の変化を示すグラフである。
【図17】制御ユニットのトラクションコントロールの処理動作を示すフローチャートである。
【図18】制御ユニットの、トラクションコントロール作動による要求トルク低下時の処理動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態の説明は、本質的に例示に過ぎず、本発明、その適用物或いはその用途を制限することを意図するものではない。
【0023】
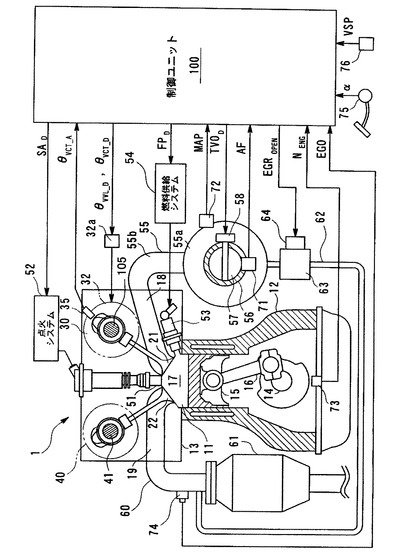
図1は、本発明の実施形態に係る内燃機関システムの概略構成図である。
【0024】
図1を参照して、同内燃機関システムは、エンジン1、エンジン1に付随する様々なアクチュエータ、様々なセンサ、および該センサからの信号に基づきアクチュエータを制御する制御器としての制御ユニット100を有する。
【0025】
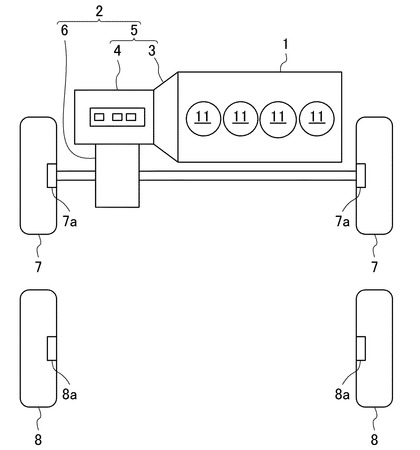
エンジン1は、火花点火式内燃機関であって、4つの気筒11を有するものである(図2参照)が、いかなる数の気筒11を有するものであってもよい。エンジン1は、自動車等の車両に搭載され、そのクランクシャフト14は、図2に示すように、前記車両に搭載された動力伝達装置2を介して前記車両の左右の前輪7に連結されており、エンジン1の動力が、動力伝達装置2によって前輪7に伝達されて、車両を推進する。
【0026】
前記動力伝達装置2は、トルクコンバータ3および変速機構4を含む自動変速機5と、ディファレンシャル機構6とを有している。トルクコンバータ3は、図示は省略するが、エンジン1のクランクシャフト14と接続されてエンジン1の出力が入力されるポンプインペラと、このポンプインペラに対峙するタービンとを有し、このタービンの回転が変速機構4に出力されるようになっている。
【0027】
前記変速機構4は、図示は省略するが、タービンの回転が入力される入力軸と、ディファレンシャル機構6を介して前輪7に連結される出力軸と、これら入出力軸間に設けられた、例えば遊星歯車機構等の変速歯車機構と、該変速歯車機構の変速比を変更するための複数のクラッチとを有している。そして、変速機構4は、前記クラッチの締結および解放により、例えば前進第1速から第5速まで変速可能に構成される。
【0028】
前記左右の前輪7には、当該前輪7の車輪速度を検出する車輪速度センサ7aがそれぞれ設けられており、前記車両における左右の後輪8には、当該後輪8の車輪速度を検出する車輪速度センサ8aがそれぞれ設けられている。
【0029】
前記エンジン1は、13以上の幾何学的圧縮比を持ち、この幾何学的圧縮比は、14以上16以下であるのが好ましい。幾何学的圧縮比が大きいということは、膨張比が大きいことを意味するので、幾何学的圧縮比が大きいほど、エンジン1の運転効率は上がる。そこで、本実施形態では、幾何学的圧縮比を13以上に設定し、点火リタード等の方法によってノッキングを回避しつつ高トルクと燃費の大幅な低減とを図ることとしている。
【0030】
尤も、圧縮比が高いほど、異常燃焼発生の可能性が高まるので、有効圧縮比を小さくする、すなわち、気筒空気充填量を下げる必要が生じる。そうなると、気筒容積の割に得られる出力が低下するために、エンジン1の重量比で見たときの効率は低下し、また、エンジン1の、車両のエンジンルーム内への搭載性に問題が生じる。従って、幾何学的圧縮比の上限は、16以下にするのが好ましい。
【0031】
エンジン1は、シリンダブロック12と、その上に載置されるシリンダヘッド13とを備えており、それらの内部に、後述のピストン15と共に燃焼室17を規定する4つの気筒11が形成されている。周知のように、シリンダブロック12には、ジャーナルやベアリング等によりクランクシャフト14が回転自在に支持されており、このクランクシャフト14がピストン15に対し、コネクティングロッド16を介して連結されている。
【0032】
ピストン15は、各気筒11内に摺動自在に嵌挿されて燃焼室17を区画している。シリンダヘッド13には、気筒11毎に2つの吸気ポート18(図1には1つのみ示す)が形成されて、それぞれ燃焼室17に連通している。同様に、シリンダヘッド13には、気筒11毎に2つの排気ポート19(図1には1つのみ示す)が形成されて、それぞれ燃焼室17に連通している。シリンダヘッド13には、吸気弁21および排気弁22が、それぞれ、吸気ポート18および排気ポート19を燃焼室17から遮断(閉)可能なように配設されている。吸気弁21は、動弁装置としての吸気弁駆動機構30により、排気弁22は排気弁駆動機構40により、それぞれ駆動されて、所定のタイミングで往復動して、吸気ポート18および排気ポート19をそれぞれ開閉するものである。
【0033】
吸気弁駆動機構30は、後述のインナシャフト105を有し、排気弁駆動機構40は、排気カムシャフト41を有する。インナシャフト105および排気カムシャフト41は、クランクシャフト14により、周知のチェーン/スプロケット機構等の動力伝達機構を介して、該クランクシャフト14に同期して駆動される。この動力伝達機構は、周知のように、クランクシャフト14が二回転する間に、インナシャフト105および排気カムシャフト41が一回転するように構成される。吸気弁21および排気弁22は、インナシャフト105および排気カムシャフト41によりそれぞれ駆動される、つまりクランクシャフト14により、該クランクシャフト14に同期して駆動されることになる。尚、吸気弁駆動機構30については、後に詳細に説明する。
【0034】
インナシャフト105の位相角は、位相センサ35により検出され、その位相センサ35による検出信号θVCT_Aが制御ユニット100に入力される。
【0035】
シリンダヘッド13における各気筒11の中心軸線上には、点火プラグ51が配設されている。この点火プラグ51は、例えばねじ等の周知の構造によってシリンダヘッド13に取り付けられている。点火プラグ51による点火を行わせる点火システム52は、制御ユニット100からの制御信号SADを受けて、点火プラグ51が所望の点火タイミングで火花を発生するよう、それに通電する。
【0036】
シリンダヘッド13の一側(図例では吸気側)には、燃料噴射弁53が、例えばブラケットを使用する等の周知の構造で取り付けられている。この燃料噴射弁53の先端は、上下方向については2つの吸気ポート18の下方に、また、水平方向についてはそれら2つの吸気ポート18の中間に位置して、燃焼室17内に臨んでいる。
【0037】
燃料噴射弁53に燃料を供給する燃料供給システム54は、図示は省略するが、燃料噴射弁53に燃料を昇圧して供給する高圧ポンプと、この高圧ポンプに燃料タンクから燃料を送給する配管やホース等と、燃料噴射弁53を駆動する電気回路とを備えている。この電気回路は、制御ユニット100からの制御信号FPDを受けて燃料噴射弁53のソレノイドを作動させ、所定のタイミングで所望量の燃料を燃焼室17内に噴射させる。
【0038】
吸気ポート18は、吸気マニホールド55内の吸気経路55b(吸気ポート18と共に、燃焼室17内へ導入される空気が通過する吸気通路を構成する)によってサージタンク55aに連通している。図示しないエアクリーナからの吸気流は、スロットルボデー56を通過してサージタンク55aに供給される。スロットルボデー56にはスロットル弁57が配置されており、周知のようにサージタンク55aに向かう吸気流を絞って、その流量を調整する。そして、スロットルアクチュエータ58が、制御ユニット100からの制御信号TVODを受けて、スロットル弁57を駆動してその開度(以下、スロットル開度という)を調整する。
【0039】
排気ポート19は、排気マニホールド60内の排気経路によって周知のように排気管内の通路に連通している。排気マニホールド60よりも下流の排気通路には、一つ以上の触媒コンバータ61を有する排気ガス浄化システムが配置される。触媒コンバータ61は、周知の三元触媒、リーンNOx触媒、酸化触媒等とすることができ、それ以外にも、特定の燃料制御手法による排気ガス浄化の目的にかなうものであれば、いかなるタイプの触媒としてもよい。
【0040】
また、排気ガスの一部を吸気系に循環させる(以下、EGRともいう)ために、吸気マニホールド55(スロットル弁57よりも下流側)と排気マニホールド60との間がEGRパイプ62によって接続されている。排気側の圧力は吸入側よりも高いので、排気ガスの一部は、EGRパイプ62を介して吸気マニホールド55に流れ込むようになり(この流れ込むガスをEGRガスと呼ぶ)、吸気マニホールド55から燃焼室17に吸入される新気と混ざることになる。EGRパイプ62にはEGR弁63が配設され、EGRガスの流量を調整するようになっている。そして、EGR弁アクチュエータ64が、制御ユニット100からの制御信号EGROPENを受けて、EGR弁63を駆動してその開度を調整する。
【0041】
制御ユニット100は、周知のマイクロコンピュータをベースとするコントローラであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、電気信号の入出力をする入出力(I/O)バスとを備えている。
【0042】
制御ユニット100は、エアフローセンサ71から吸気流量AF、吸気圧センサ72から吸気マニホールド圧MAP、クランク角センサ73からクランク角パルス信号、というように種々の入力を受け入れる。制御ユニット100は、例えば、クランク角パルス信号に基づいて、エンジン回転速度(以下、機関速度ともいう)NENGを計算する。また、制御ユニット100は、酸素濃度センサ74から排気ガスの酸素濃度EGOについての入力も受け入れる。さらに、アクセルペダルの踏み込み量を検出するアクセル開度センサ75からのアクセル開度信号αを受け入れる。また、制御ユニット100は、自動変速機5の変速機構4の出力軸の回転速度を検出する車速センサ76からの車速信号VSPを受け入れる。
【0043】
より具体的に、制御ユニット100は、前記のような入力に基づいて、以下のようなエンジン1の制御パラメータを計算する。例えば、所望のスロットル開度TVO、燃料噴射量FP、点火タイミングSA、バルブ位相角θVCT、EGR量QEGR(EGRガス流量)等である。そして、それら制御パラメータに基づいて、対応する制御信号として、スロットル開度信号TVOD、燃料噴射パルス信号FPD、点火パルス信号SAD、バルブ位相角信号θVCT_D、およびEGR開度信号EGROPENを、スロットルアクチュエータ58、燃料供給システム54、点火システム52、後述の吸気カムシャフト位相可変機構32、およびEGR弁アクチュエータ64にそれぞれ出力する。
【0044】
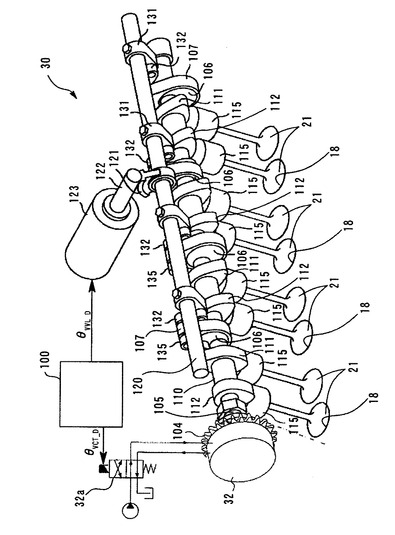
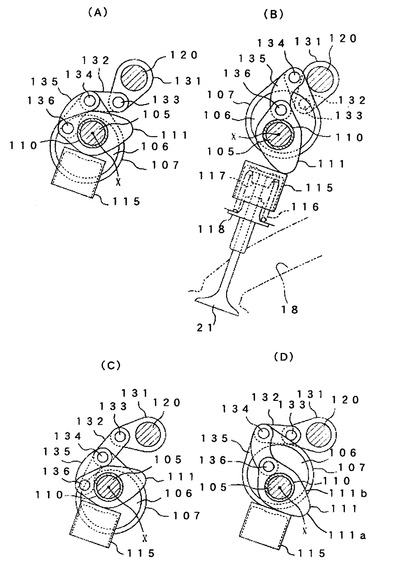
次に、図3および図4を参照して、本実施形態に係る吸気弁駆動機構30の詳細について説明する。図3は、図1の実施形態に係る吸気弁駆動機構30の具体的な構成を示す斜視図であり、図4は、図1の吸気弁駆動機構30の要部を示す断面図である。図4において、(A)は大リフト制御状態においてバルブリフト量が0のときを示し、(B)は大リフト制御状態においてバルブリフト量が最大のときを示し、(C)は小リフト制御状態においてバルブリフト量が0のときを示し、(D)は小リフト制御状態においてバルブリフト量が最大のときを示している。
【0045】
本実施形態の吸気弁駆動機構30は、吸気カムシャフト位相可変機構(可変カムタイミングメカニズム;以下、VCT機構という)32を備えており、これはチェーンドライブ機構によってクランクシャフト14に駆動連結されている。このチェーンドライブ機構は、ドリブンスプロケット104の他に、図示しないが、クランクシャフト14のドライブスプロケットと、それら両スプロケットに巻き掛けられたチェーンとを備える。
【0046】
VCT機構32は、ドリブンスプロケット104に一体に回転するように固定されたケースと、それに収容され且つインナシャフト105に一体に回転するように固定されたロータとを有する。ケースとロータとの間には複数の液圧室が、インナシャフト105の中心軸X(図4に示す)の周りに(周方向に)並んで形成される。そして、ポンプにより加圧された液体(例えばエンジンオイル)が各々の液圧室に選択的に供給されて、互いに対向する液圧室の間に圧力差を形成する。
【0047】
VCT機構32を制御するVCT制御ユニットとして機能する制御ユニット100が、VCT機構32の電磁バルブ32aに制御信号θVCT_Dを出力し、この制御信号θVCT_Dを受けて、電磁バルブ32aが液圧のデューティ制御をすることで、前記液圧室に供給する液体の流量や圧力等を調整する。これにより、スプロケット104とインナシャフト105との間の実際の位相差が変更され、それによって、周知のようにインナシャフト105の所望の回転位相が達成される。なお、制御ユニット100とは別構成の制御ユニットでVCT制御ユニットを構成してもよい。
【0048】
インナシャフト105は、図4(A)〜(D)に示すように各々の気筒11に対応して一体的に設けられたディスク形状の偏心カム106を有する。この偏心カム106は、インナシャフト105の軸芯(中心軸X)から偏心して設けられ、VCT機構32により規定される位相で回転する。この偏心カム106の外周にはリング状アーム107の内周が回転自在に嵌め合わされており、インナシャフト105がその中心軸X周りに回転すると、リング状アーム107は、同じ中心軸Xの回りを公転しながら偏心カム106の中心の周りを回動する。
【0049】
また、前記インナシャフト105には、気筒11毎にロッカーコネクタ110が配設されている。このロッカーコネクタ110は円筒状で、インナシャフト105に外挿されて同軸に軸支され、換言すれば、その中心軸X周りに回動可能に支持されている一方、該ロッカーコネクタ110の外周面はベアリングジャーナルとされ、シリンダヘッド13に配設されたベアリングキャップ(図示せず)によって回転可能に支持されている。
【0050】
前記ロッカーコネクタ110の両端には、第1および第2のロッカーカム111、112がそれぞれ一体的に設けられている。両者の構成は同じなので、図4(A)〜(D)にはロッカーカム111について示すが、このロッカーカム111は、カム面111aと円周状のベース面111bとを有し(図4(D)参照)、それらはいずれもタペット115の上面に摺接するようになっている。ロッカーカム111は、連続的には回転せず、揺動運動することを除いては、一般的な吸気弁駆動機構のカムと同様にタペット115を押圧してバルブを開くものである。タペット115はバルブスプリング116で支えられている。バルブスプリング116は、周知のように保持器117、118の間に支持されている。
【0051】
再度、図3を参照すると、インナシャフト105およびロッカーカム部品110〜112の組立体と並んで、その上方にコントロールシャフト120が配置されている。このコントロールシャフト120は、図示しないベアリングによって回転可能に支持されており、その長手方向の中央付近には、外周面から突出する同軸状のウォームギヤ121が一体的に設けられている。
【0052】
ウォームギヤ121はウォーム122と噛合している。このウォーム122は、可変バルブリフト機構(VVL)のアクチュエータである例えばステッピングモータ123の出力軸に固定されている。そして、制御ユニット100からの制御信号(バルブリフト量信号)θVVL_Dを受けたステッピングモータ123の作動により、コントロールシャフト120を所望の位置に回動させることができる。こうして回動されるコントロールシャフト120には、気筒11毎のコントロールアーム131が取り付けられており、これらコントロールアーム131は、コントロールシャフト120の回動によって一体的に回動される。
【0053】
また、そうして回動されるコントロールアーム131は、コントロールリンク132によってリング状アーム107に連結されている。すなわち、コントロールリンク132の一端部は、コントロールピボット133によってコントロールアーム131の先端部に回転自在に連結され、該コントロールリンク132の他端部は、コモンピボット134によってリング状アーム107に回転自在に連結されている。
【0054】
ここで、コモンピボット134は、前記のようにコントロールリンク132の他端部をリング状アーム107に連結するとともに、このリング状アーム107を貫通してそれをロッカーリンク135の一端部にも回転自在に連結している。そして、このロッカーリンク135の他端部が、ロッカーピボット136によってロッカーカム111に回転自在に連結されており、これによりリング状アーム107の回転がロッカーカム111に伝えられるようになっている。
【0055】
より具体的に、インナシャフト105が回転して、これと一体に偏心カム106が回転するとき、図4(A)および(C)に示すように偏心カム106が下側に位置すれば、リング状アーム107も下側に位置するようになり、一方、図4(B)および(D)に示すように偏心カム106が上側に位置すれば、リング状アーム107も上側に位置するようになる。
【0056】
その際、リング状アーム107とコントロールリンク132とを連結するコモンピボット134の位置は、コントロールピボット133の位置と、偏心カム106およびリング状アーム107の共通中心位置との、3者相互の位置関係によって規定されるから、図示のようにコントロールピボット133の位置が変化しない(コントロールシャフト120が回動しない)とすれば、コモンピボット134は、偏心カム106およびリング状アーム107の共通中心周りの回転のみに対応して概略上下に往復動作するようになる。
【0057】
そのようなコモンピボット134の往復動作は、ロッカーリンク135によって第1のロッカーカム111に伝えられ、該第1のロッカーカム111を、ロッカーコネクタ110で連結された第2のロッカーカム112と共に中心軸X周りに揺動させる。こうして揺動するロッカーカム111は、図4(B)および(C)に示すように、カム面111aがタペット115の上面に接触する間は、当該タペット115をバルブスプリング116のばね力に抗して押し下げ、このタペット115が吸気弁21を押し下げて、吸気ポート18を開かせる。
【0058】
一方、図4(A)および(D)に示すように、ロッカーカム111のベース面111bがタペット115の上面に接触するとき、タペット115は押し下げられない。これは、中心軸Xを中心とするロッカーカム111のベース面111bの半径が、その中心軸Xとタペット115の上面との間隔以下に設定されているからである。
【0059】
上述の如きコントロールピボット133と、コモンピボット134と、偏心カム106およびリング状アーム107の共通中心との相互の位置関係において、コントロールピボット133の位置が変化すれば、これにより3者相互の位置関係に変化が生じ、コモンピボット134は前記とは異なる軌跡を描いて往復動作するようになる。
【0060】
よって、ステッピングモータ123の作動によりコントロールシャフト120およびコントロールアーム131を回転させて、コントロールピボット133の位置を変えることにより、ロッカーカム111,112の揺動範囲を変更することができる。例えば、コントロールアーム131を図4において時計回りに回動させて、コントロールピボット133を、図4(A)に示す位置から図4(C)に示すように左斜め上側にずらすと、ロッカーカム111の揺動範囲は、相対的にベース面111bがタペット115の上面に接触する傾向の強いものとなる。
【0061】
図5は、本実施形態に係る吸気弁駆動機構30の設定例を示す図である。
【0062】
図5を参照して、本実施形態では、上述した吸気弁駆動機構30およびこれに関連する構成部品(特にVCT機構32および可変バルブリフト機構)により、バルブリフト量θVVLは、例えばθVVL_minからθVVL_maxまでの範囲で、各気筒11への目標空気充填量CEの増加に応じて増大するように制御されるとともに、吸気弁21の閉弁時期(吸気弁閉タイミングともいう)は、バルブリフト量θVVLの増大に応じてθVCT_minからθVCT_maxの範囲で連続的に遅角する。吸気弁21の開弁時期および閉弁時期は、必要に応じていかなる組合せも可能であり、例えば、バルブリフト量を0にするいわゆるロストモーション動作も可能である。このように吸気弁駆動機構30(特にVCT機構32および可変バルブリフト機構)は、吸気弁21の閉弁時期を制御する吸気閉弁時期可変機構を構成することになる。
【0063】
本実施形態では、例えばエンジン回転速度NENGが1500rpmの時の吸気行程において吸気弁21を開閉する際、吸気弁21の開弁時期については、殆どの運転領域で排気上死点直前(クランク角度で例えば20°CA)から開弁を開始し、エンジン1の要求トルク(目標トルクTQ)に応じて閉弁時期を変更するようにしている。
【0064】
ここで、本実施形態では、吸気弁21の閉弁時期として、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側に設定される第1閉弁タイミング範囲IVC1st(早閉じ範囲に相当)と、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側に設定され且つ前記第1閉弁タイミング範囲IVC1stから離間した第2閉弁タイミング範囲IVC2nd(遅閉じ範囲に相当)とが設定されており、吸気弁21が第1閉弁タイミング範囲IVC1stで閉じるように運転される早閉じモードMEIVCと、吸気弁21が第2閉弁タイミング範囲IVC2ndで閉じるように運転される遅閉じモードMLIVCと、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCに切り換える進角遷移モードMTR-Aと、運転モードを早閉じモードMEIVCから遅閉じモードMLIVCに切り換える遅角遷移モードMTR-Rとを設定可能に構成されている。なお、第1および第2閉弁タイミング範囲IVC1st,IVC2ndは、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングを挟んで進角側および遅角側にそれぞれ設定されており、詳しくは後述するように、必ずしも吸気下死点を基準として設定されるものではない(後述する図15参照)。
【0065】
前記遅閉じモードMLIVCは、エンジン1における要求トルク(目標トルクTQ、つまり目標空気充填量CEと言い換えることができる)と機関速度(エンジン回転速度NENG)とからなるエンジン運転状態が高負荷低速側の運転領域にあるとき、つまりエンジン1の要求トルクが、機関速度毎に定まる所定トルク(図8の特性線L1又はL2参照)以上であるとき(目標空気充填量CEが所定空気充填量以上であるとき)に選択されるモードであり、この遅閉じモードMLIVCでは、吸気弁21のバルブリフト量θVVLを大きくし、このバルブリフト量θVVLに対応して吸気弁閉タイミングを例えば吸気下死点よりも遅角する。以下、前記高負荷低速側の運転領域のことを、遅閉じ運転領域という。
【0066】
一方、前記早閉じモードMEIVCは、前記エンジン運転状態が前記遅閉じ運転領域よりも低負荷ないし高速側の運転領域にあるとき、つまりエンジン1の要求トルクが、前記所定トルクよりも小さいとき(目標空気充填量CEが所定空気充填量よりも少ないとき)に選択されるモードであり、この早閉じモードMEIVCでは、吸気弁21のバルブリフト量θVVLを小さくし、このバルブリフト量θVVLに対応して吸気弁閉タイミングを例えば吸気下死点よりも進角する。以下、前記遅閉じ運転領域よりも低負荷ないし高速側の運転領域のことを、早閉じ運転領域という。
【0067】
なお、本実施形態では、後述の如く、運転モードの切換にヒステリシスを設けているために、遅閉じ運転領域から早閉じ運転領域への切換え時と、早閉じ運転領域から遅閉じ運転領域への切換え時とで、両運転領域(前記所定トルク)が変化することになる(図8参照)。
【0068】
前述の如く、早閉じモードMEIVCが設定される第1閉弁タイミング範囲IVC1stは、遅閉じモードMLIVCが設定される第2閉弁タイミング範囲IVC2ndよりも進角し且つ離間している。これら閉弁タイミング範囲IVC1st,IVC2ndの間には、遅閉じモードMLIVCおよび早閉じモードMEIVCでは吸気弁21が閉じることのない中間閉弁タイミング範囲IVCIMが設定されている。後述の如く、遅角遷移モードMTR-Rおよび進角遷移モードMTR-Aにおいて、吸気弁閉タイミングが中間閉弁タイミング範囲IVCIMとなる。
【0069】
次に、上述のような運転モードを設定している理由について説明する。
【0070】
エンジン1の出力を高め、燃費を低減するために膨張比を高くする一方で、異常燃焼発生を抑制するために、吸気弁21の閉弁時期を吸気下死点よりも進角または遅角させて、有効圧縮比を低くする方法として、吸気弁21の閉弁時期を吸気下死点よりも進角する早閉じでエンジン1を運転制御する場合には、図4(A)および(B)から明らかなように、ロッカーカム111の揺動量は、小さくなり、バルブスプリング116の抵抗も小さくなるので、低負荷側では好ましいものとなる。しかし、要求負荷の増加に応じて、機関速度が上昇するのに連れて、所定の気筒空気充填量を得るための吸気弁21の閉弁時期は遅角する。また、機関速度上昇に伴い、気筒内の混合気の流動性が高まる等の理由により異常燃焼発生可能性は低くなるので、目標とする吸気弁閉タイミングの進角側への制限量は低下する。従って、吸気弁閉タイミングIVCを、機関速度上昇に伴い高い速度で遅角させる必要がある。しかしながら、吸気弁駆動機構30の応答遅れにより、吸気弁21の閉弁時期を目標に沿って高い速度で遅角させることは困難であるので、実際の吸気弁閉タイミングが、目標とする吸気弁閉タイミングよりも進角側となって、気筒空気充填量の低下を招く虞れがある。
【0071】
他方、吸気弁閉タイミングIVCを、当該エンジン回転速度NENGにおいて気筒空気充填量が最大となるタイミングよりも遅角側に設定した場合、ピストン15が下死点に移動するまで気筒11内に空気を導入する。更に下死点を越えてピストン15が上昇中に、気筒内の空気を吸気通路内に戻すことで有効圧縮比を低減する。これを実現するためには、吸気弁21のバルブリフト量および動弁範囲を最大値近傍まで大きく設定する必要があり(図5参照)、機械的損失が大きくなる懸念がある。
【0072】
そこで、本実施形態では、第1閉弁タイミング範囲IVC1stと第2閉弁タイミング範囲IVC2ndとを設定し、高圧縮比エンジンにおいて、可及的に連続的な運転領域で膨張比を高めるとともに、異常燃焼懸念の高い中間閉弁タイミング範囲IVCIMでは、ノッキング対策を講じることによって、プリイグニション等の異常燃焼を回避しつつ、出力の向上と燃費の低減とを図ることとしているのである。
【0073】
このような構成を実現するため、本実施形態では、図6および図7のフローチャートが実行されるように設定されている。
【0074】
図6および図7は、本発明の実施形態に係るエンジン1の制御例を示すフローチャートである。
【0075】
まず、図6を参照して、制御ユニット100は、最初に諸設定の初期化を実行する(ステップS1)。この初期化において、制御ユニット100は、現在の運転モードMを早閉じモードMEIVCに設定する。
【0076】
次いで、制御ユニット100は、アクセル開度センサ75からのアクセル開度信号α、クランク角パルス信号に基づくエンジン回転速度NENG、車速センサ76からの車速信号VSPを読み取りまたは算出し、これらの情報に基づいて、目標トルクTQを算出する(ステップS2)。
【0077】
次いで、制御ユニット100は、目標トルクTQおよびエンジン回転速度NENGに基づき、燃料噴射量FP(或いは空燃比)、目標空気充填量CE、EGR量QEGR、および点火タイミングSAを算出する(ステップS3)。
【0078】
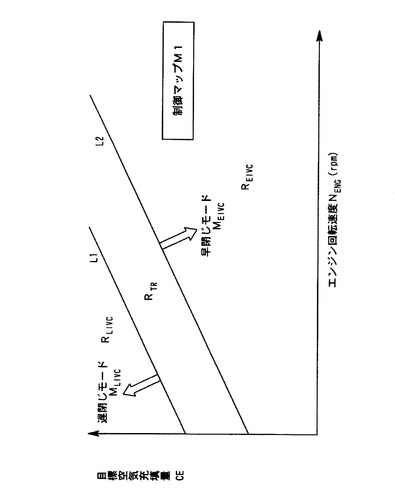
次いで、制御ユニット100は、予め前記メモリに記憶された制御マップM1のデータを読み取り、この制御マップM1に基づいて目標空気充填量CEとエンジン回転速度NENGの値とに適合する現在の運転領域Rを判定する(ステップS4)。この結果、制御ユニット100は、運転領域Rを図8に示すように判定する。
【0079】
図8は、図6のフローチャートにおいて判定される運転領域の例を示す特性図である。
【0080】
図8に示すように、本実施形態では、エンジン回転速度NENGに比例する特性線L1,L2(前記所定トルク)を設定し、特性線L1に対して高負荷低速側である遅閉じ運転領域RLIVC(特性線L1上も含む)、つまりエンジン1の要求トルクが所定トルク以上である(目標空気充填量が所定空気充填量以上である)遅閉じ運転領域RLIVCでは遅閉じモードMLIVCが、特性線L2に対して低負荷ないし高速側の早閉じ運転領域REIVC、つまりエンジン1の要求トルクが所定トルクよりも小さい(目標空気充填量が所定空気充填量よりも少ない)早閉じ運転領域REIVCでは、早閉じモードMEIVCが、それぞれ選定されるように設定されている。図示の例において、特性線L1と特性線L2との間の過渡領域RTRは、ヒステリシスを設けて運転モードの切換に用いられる領域であり、早閉じ運転領域REIVCから要求負荷が高くなっても、特性線L1に達するか又は特性線L1を越えるまでは、運転モードは早閉じモードMEIVCが維持され、遅閉じ運転領域RLIVCから要求負荷が低くなっても、特性線L2を越えるまでは、運転モードは遅閉じモードMLIVCが維持される。なお、ヒステリシスを設ける必要は必ずしもないが、過渡的で不安定な進角遷移モードMTR-Aや遅角遷移モードMTR-Rが生じる機会を出来る限り少なくするためには、ヒステリシスを設けることが好ましい。
【0081】
図6を参照して、制御ユニット100は、現在の運転モードMが早閉じモードMEIVCであるか否かを判定する(ステップS5)。仮に運転モードMが早閉じモードMEIVCである場合、制御ユニット100は、さらに現在の目標空気充填量CEおよびエンジン回転速度NENGに基づき現在の運転領域Rを判定し、現在の運転領域Rが遅閉じ運転領域RLIVC以外であるか、すなわち要求負荷に基づく吸気弁閉タイミングIVCが第2閉弁タイミング範囲IVC2nd以外にあるか否かを判定する(ステップS6)。現在の運転領域Rが遅閉じ運転領域RLIVC以外である場合、制御ユニット100は、運転モードMを早閉じモードMEIVCに設定する(ステップS7)。次いで、制御ユニット100は、この早閉じモードMEIVCでの目標空気充填量CE、エンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、スロットル開度TVOを算出し(ステップS8)、この算出したバルブリフト量θVVL、開弁期間θVCTおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FP、EGR量QEGRおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、TVOD、FPD、EGROPENおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する(ステップS9)。その後、ステップS2に移行し、上述した制御を繰り返す。
【0082】
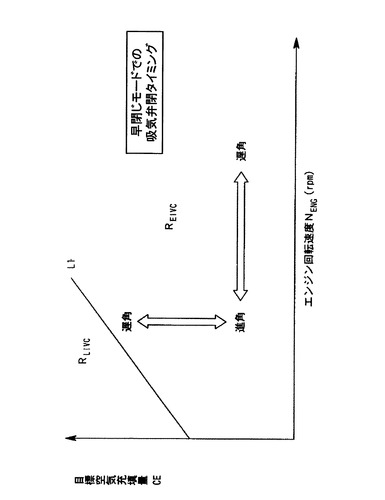
図9は、図6のフローチャートによって設定される早閉じモードMEIVCでの吸気弁閉タイミングの制御例を示す図である。
【0083】
図9を参照して、同図に示した制御例では、運転領域Rが遅閉じ運転領域RLIVC以外、すなわち吸気弁12の閉弁時期が第1閉弁タイミング範囲IVC1stで運転される場合、エンジン回転速度NENGが高くなるほど、吸気弁21の閉弁時期は遅角する。また、目標空気充填量CEが増加するほど、吸気弁21の閉弁時期は遅角する。この結果、第1閉弁タイミング範囲IVC1stで運転される場合では、吸気弁21の閉弁時期が遅角することによって、空気充填量CEを増加させ、要求トルクに見合うトルクを出力できるようになっている。
【0084】
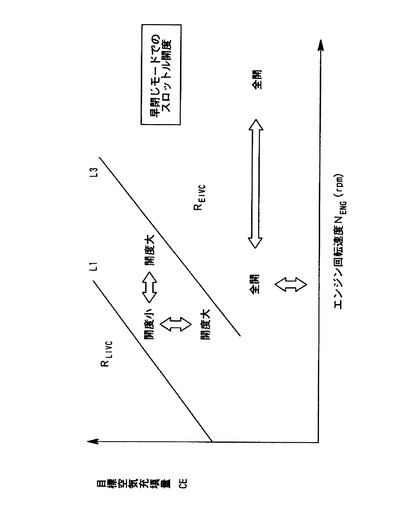
図10は、図6のフローチャートによって設定される早閉じモードMEIVCでのスロットル開度の制御例を示す図である。
【0085】
図10を参照して、同図に示した制御例では、特性線L1と平行にエンジン回転速度NENGに比例する特性線L3を低負荷側に設定している。特性線L3は、図8に示す特性線L2よりも低負荷ないし高速側であってもよく、特性線L2と同じかまたは特性線L2に対して高負荷ないし低速側であってもよい。この特性線L3に対して低負荷ないし高速側の運転領域では、スロットル開度TVOは、全開になっており、目標空気充填量CEは、専ら、吸気弁21の閉弁時期で制御されるようになっている。このため、充分な空気充填量CEを確保し、ポンプ損失が生じないように制御することが可能になる。他方、特性線L1と特性線L3との間では、要求負荷が高まるに連れて、或いはエンジン回転速度NENGが低減するのに連れて、スロットル開度TVOを小さくするように制御される。このため、エンジン運転状態が、低中負荷中高速運転領域から運転モードMを遅閉じモードMLIVCに設定する必要のある高負荷低速運転領域に近づくに連れて、スロットル弁57下流における、吸気ポート18を含む吸気通路内の圧力を低減する。これにより、高圧縮比エンジンを採用した本実施形態において、運転モードMを切り換える過渡的で不安定な運転領域であっても、吸気弁閉タイミングの変化に伴い一時的に気筒空気充填量が過大となることを抑制して、プリイグニション等の異常燃焼を回避することができる。
【0086】
次に、図6を参照して、ステップS6において、現在の運転領域Rが遅閉じ領域RLIVCである場合(ステップS6においてNOの場合)、制御ユニット100は、運転モードMを遅角遷移モードMTR-Rに設定する(ステップS10)。次いで、制御ユニット100は、所定のカウント時間CTR-Rをカウント値CTRとして設定し(ステップS11)、この遅角遷移モードMTR-Rでの目標空気充填量CE、エンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、EGR量QEGR 、およびスロットル開度TVOを算出する(ステップS12)。所定のカウント時間CTR-Rを設けているのは、吸気弁駆動機構30による吸気弁閉タイミング設定が切り換わるまでの間、一時的に目標空気充填量CEを低減してプリイグニション等の異常燃焼を回避するためである。
【0087】
ステップS12が実行された後は、ステップS9に移行することにより、遅角遷移モードMTR-Rで算出したバルブリフト量θVVL、開弁期間θVCT、EGR量QEGRおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FPおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、EGROPEN、TVOD、FPDおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する。その後、ステップS2に移行し、上述した制御を繰り返す。
【0088】
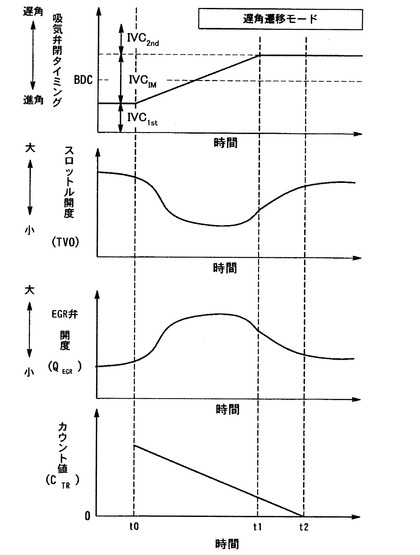
図11は、図6のフローチャートによる遅角遷移モードMTR-Rでの制御例を示すタイミングチャートである。
【0089】
図11に示すように、遅角遷移モードMTR-Rでの制御が実行されると、その開始タイミングt0からカウント値CTRがデクリメントされ(図7のステップS27参照)、タイミングt2で終了する。吸気弁駆動機構30は、カウントを開始したタイミングt0から吸気弁閉タイミングを第2閉弁タイミング範囲IVC2ndに移動するために、遅角を開始する。この遅角遷移モードMTR-Rにおいては、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が遅角するのに連れて(例えば遅角に比例して)低減し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が遅角するのに連れて増大する。これにより、当該気筒11において、吸気弁21がプリイグニション等の異常燃焼が懸念される中間閉弁タイミング範囲IVCIMに入り込んだとしても、スロットル弁57の一時的閉作動による吸気通路内の圧力の低下によって異常燃焼が防止される。
【0090】
また、遅角遷移モードMTR-Rにおいて、EGR弁アクチュエータ64がEGR弁63を一時的に開方向に駆動して、EGR弁63の開度(EGR量QEGR)を増大させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が遅角するのに連れて(例えば遅角に比例して)増大し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が遅角するのに連れて低減する。前記EGR弁63の一時的開動作により、筒内残留ガスである内部EGRよりも低温の外部EGRが筒内に導入されるので、より確実に異常燃焼を回避することが可能になる。
【0091】
吸気弁閉タイミングの遷移は、カウントの終了タイミングt2よりも早いタイミングt1で終了するように、諸元が設定される。すなわち、このタイミングt1を経過した時点では、ステップS12で設定されるEGR量QEGRおよびスロットル開度TVOが、遅閉じモードMLIVCと同様の値に切り換えられる。このため、タイミングt1を経過した時点では、未だ遅角遷移モードMTR-Rではあるが、運転モードの遷移は実際には終了していることになる。
【0092】
次に、図6に示したフローチャートのステップS5において、制御ユニット100に設定されている運転モードMが早閉じモードMEIVCではなかった場合(ステップS5において、NOの場合)の制御例について、図7に示すフローチャートを参照しながら説明する。
【0093】
運転モードMが早閉じモードMEIVCではなかった場合、制御ユニット100は、さらに運転モードMが遅閉じモードMLIVCであるか否かを判定する(ステップS20)。仮に運転モードMが遅閉じモードMLIVCである場合、制御ユニット100は、さらに現在の目標空気充填量CEおよびエンジン回転速度NENGに基づき運転領域Rを判定し、現在の運転領域Rが早閉じ運転領域REIVC以外であるか、すなわち要求負荷に基づく吸気弁閉タイミングIVCが第1閉弁タイミング範囲IVC1st以外にあるか否かを判定する(ステップS21)。現在の運転領域Rが早閉じ運転領域REIVC以外である場合、制御ユニット100は、運転モードMを遅閉じモードMLIVCに設定する(ステップS22)。次いで、制御ユニット100は、この遅閉じモードMLIVCでの目標空気充填量CEおよびエンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、スロットル開度TVOを算出し(ステップS23)、この算出したバルブリフト量θVVL、開弁期間θVCTおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FP、EGR量QEGRおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、TVOD、FPD、EGROPENおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する(ステップS9)。その後、ステップS2に移行し、上述した制御を繰り返す。
【0094】
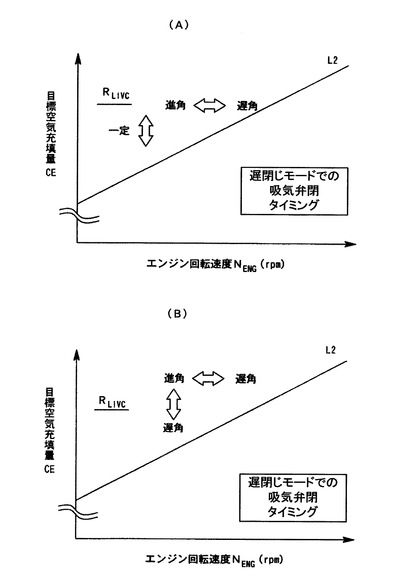
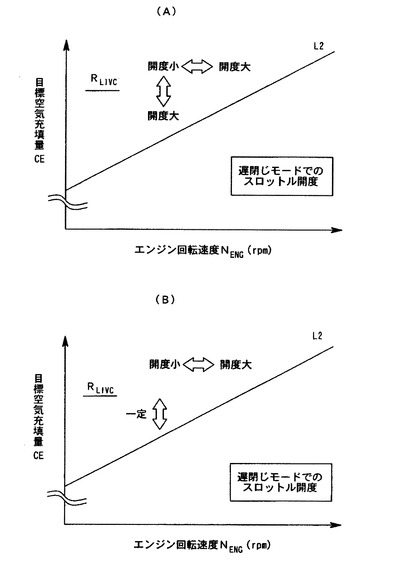
図12は、図7のフローチャートによって設定される遅閉じモードMLIVCでの吸気弁閉タイミングの制御例を示す図であり、図13は、図7のフローチャートによって設定される遅閉じモードMLIVCでのスロットル開度の制御例を示す図である。各図において、(A)は目標空気充填量CEに応じてスロットル開度を並行して制御する場合であり、(B)はスロットル開度を一定に維持する場合である。
【0095】
図12(A)および図13(A)を参照して、第2閉弁タイミング範囲IVC2ndで吸気弁21が閉じる場合において、スロットル開度TVOを変更しながら目標空気充填量CEを制御する場合には、目標空気充填量CEの増減に拘わらず、吸気弁閉タイミングを一定にし、スロットル弁57下流における、吸気ポート18を含む吸気通路内の圧力を制御することで、気筒空気充填量が変化する。
【0096】
他方、図12(B)および図13(B)に示すように、機関速度が一定の条件のもとでスロットル開度TVOを一定に維持し、目標空気充填量CEが増加するに連れて吸気弁閉タイミングを進角させる場合には、吸気弁閉タイミングが第2閉弁タイミングIVC2nd内で進角するに連れて、そのときの最大気筒空気充填量が得られる吸気弁閉タイミングに近づくので、気筒空気充填量が制御される。その際に、スロットル開度TVOは比較的大きな値で一定に維持され、吸気通路内の圧力が高く維持されるので、ポンプ損失が低い状態が維持される。
【0097】
図12(A)および(B)の何れの場合においても、エンジン回転速度NENGが高くなるほど、吸気弁21の閉弁時期は遅角する。また、図13(A)および(B)の何れの場合においても、エンジン回転速度NENGが高くなるほど、スロットル開度TVOは、大きく制御される。これは、エンジン回転速度NENGが高くなるほど、吸気慣性力が増加し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングが遅角することに対応しているのであり、この制御によって、所要の目標空気充填量CEを確保することができるのである。
【0098】
次に、図7を参照して、ステップS21において、現在の要求負荷に基づく吸気弁閉タイミングIVCが第1閉弁タイミング範囲IVC1stにある場合(ステップS21において、NOの場合)、制御ユニット100は、運転モードMを進角遷移モードMTR-Aに設定する(ステップS24)。次いで、制御ユニット100は、所定のカウント時間CTR-Aをカウント値CTRとして設定し(ステップS25)、この進角遷移モードMTR-Aでの目標空気充填量CEおよびエンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、EGR量QEGRおよびスロットル開度TVOを算出する(ステップS26)。
【0099】
ステップS26が実行された後は、ステップS9に移行することにより、進角遷移モードMTR-Aで算出したバルブリフト量θVVL、開弁期間θVCT、EGR量QEGRおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FPおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、EGROPEN、TVOD、FPDおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する。その後、ステップS2に移行し、上述した制御を繰り返す。
【0100】
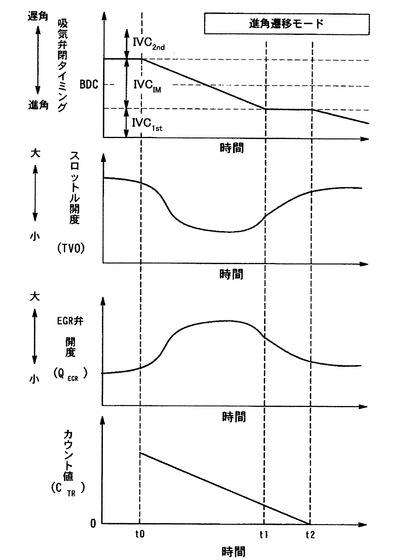
図14は、図7のフローチャートによる進角遷移モードMTR-Aでの制御例を示すタイミングチャートである。
【0101】
図14に示すように、進角遷移モードMTR-Aでの制御が実行されると、その開始タイミングt0からカウント値CTRがデクリメントされ(図7のステップS27参照)、タイミングt2で終了する。吸気弁駆動機構30は、カウントを開始したタイミングt0から吸気弁閉タイミングを第1閉弁タイミング範囲IVC1stに移動するために、進角を開始する。この進角遷移モードMTR-Aにおいては、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が進角するのに連れて(例えば進角に比例して)低減し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が進角するのに連れて増大する。これにより、当該気筒11において、吸気弁21がプリイグニション等の異常燃焼が懸念される中間閉弁タイミング範囲IVCIMに入り込んだとしても、スロットル弁57の一時的閉作動による吸気通路内の圧力の低下によって異常燃焼が防止される。
【0102】
また、進角遷移モードMTR-Aにおいて、EGR弁アクチュエータ64がEGR弁63を一時的に開方向に駆動して、EGR弁63の開度(EGR量QEGR)を増大させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が進角するのに連れて(例えば進角に比例して)増大し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が進角するのに連れて低減する。前記EGR弁63の一時的開動作により、筒内残留ガスである内部EGRよりも低温の外部EGRが筒内に導入されるので、より確実に異常燃焼を回避することが可能になる。
【0103】
吸気弁閉タイミングの遷移は、カウントの終了タイミングt2よりも早いタイミングt1で終了するように、諸元が設定される。すなわち、このタイミングt1を経過した時点では、ステップS26で設定されるEGR量QEGRおよびスロットル開度TVOが、早閉じモードMEIVCと同様の値に切り換えられる。このため、タイミングt1を経過した時点では、未だ進角遷移モードMTR-Aではあるが、運転モードの遷移は実際には終了していることになる。
【0104】
次に、図7のフローチャートにおいて、制御ユニット100に設定されている運転モードMが遅閉じモードMLIVCではなかった場合(ステップS20において、NOの場合)、運転モードMは、遅角遷移モードMTR-Rおよび進角遷移モードMTR-Aのうちの何れかである。
【0105】
そこで、本実施形態では、まず、制御ユニット100がカウント値CTRをデクリメントし(ステップS27)、運転モードMが進角遷移モードMTR-Aであるか否かを判定する(ステップS28)。
【0106】
仮に運転モードMが進角遷移モードMTR-Aである場合、制御ユニット100は、カウント値CTRが0よりも大きいか否かを判定する(ステップS29)。仮にカウント値CTRが0よりも大きい場合、制御ユニット100は、ステップS26以降の制御を実行する。これにより、進角遷移モードMTR-Aでの運転制御が継続される。
【0107】
ステップS29において、カウント値CTRが0以下である場合、既に吸気弁駆動機構30による吸気弁21の運転モード切換は完全に終了しているので、ステップS7以降のステップに移行して、運転モードMを早閉じモードMEIVCに切り換え、上述した早閉じモードでの運転制御を繰り返す。
【0108】
ステップS28において、運転モードMが遅角遷移モードMTR-Rである場合、制御ユニット100は、カウント値CTRが0よりも大きいか否かを判定する(ステップS30)。仮にカウント値CTRが0よりも大きい場合、制御ユニット100は、ステップS12以降の制御を実行する。これにより、遅角遷移モードMTR-Rでの運転制御が継続される。他方、ステップS30において、カウント値CTRが0以下である場合、既に吸気弁駆動機構30による吸気弁21の運転モード切換は完全に終了しているので、ステップS22以降のステップに移行して、運転モードMを遅閉じモードMLIVCに切り換え、上述した遅閉じモードでの運転制御を繰り返す。
【0109】
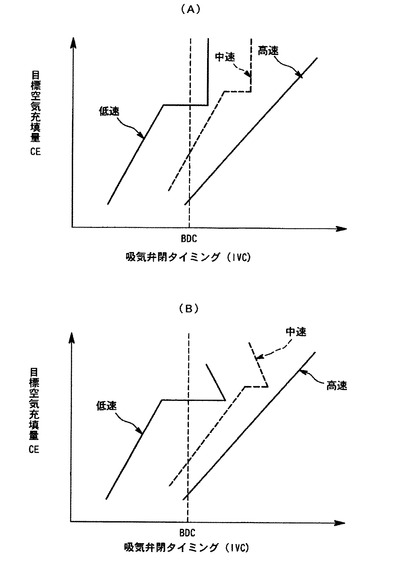
図15は、図6および図7のフローチャートを実行した制御例を示す吸気弁閉タイミングと目標空気充填量CEとの関係のグラフである。図15において、(A)は遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合、(B)は遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合である。
【0110】
図15(A)を参照して、遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合、吸気弁21の閉弁時期を最も進角側に固定して目標空気充填量CEを制御することができるので、早閉じモードMEIVCから遅閉じモードMLIVCへ切り換える時の変位量(図4におけるコントロールシャフト120の回動角度)も最小となり、早閉じモードMEIVCからの切り換えに要する時間を可及的に短くすることができる。
【0111】
他方、図15(B)を参照して、遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合、早閉じモードMEIVCから遅閉じモードMLIVCへ切り換える時の変位量(図4におけるコントロールシャフト120の回動角度)は最大となるが、吸気通路内の圧力を高く維持することができるので、ポンプ損失を最小のものとし、高い出力を維持することができる。
【0112】
何れの場合においても、エンジン回転速度NENGが上昇するにつれて、吸気弁閉タイミングが遅角するので、エンジン回転速度NENGが高いほど第1閉弁タイミング範囲IVC1stと第2閉弁タイミング範囲IVC2ndとの間の中間閉弁タイミング範囲IVCIMが小さくなり、ある回転速度(例えば、2500rpm)以上では、専ら第2閉弁タイミング範囲IVC2ndで吸気弁21が閉じることとなり、運転モードMの切り換えは不要となる。
【0113】
本実施形態では、前記制御ユニット100は、トラクションコントロールをも実行するようになされている。なお、トラクションコントロールは、制御ユニット100とは別の制御ユニットにより行うようにしてもよい。
【0114】
具体的には、制御ユニット100には、前記前輪7および後輪8に設けた車輪速度センサ7a,7bからの信号が入力される。これら入力信号に基づき、前輪7(駆動輪)の車輪速度VF(左右前輪の車輪速度の平均値)と、後輪8の車輪速度VR(左右後輪の車輪速度の平均値)とを求める。そして、前輪7の車輪速度VFから後輪8の車輪速度VRを引いた値である前輪7のスリップ量VSLIPが、所定値VSLIP1以上である場合に、トラクションコントロールを作動させる。すなわち、前記スリップ量VSLIPに基づいて、エンジン1のトルク低下量dTQを計算する。このトルク低下量dTQは、スリップ量VSLIPが大きいほど大きくなる。このトルク低下量dTQの分だけエンジン1の要求トルクを低下させる。
【0115】
そして、制御ユニット100は、遅閉じモードMLIVCである場合において、前記トラクションコントロールの作動による要求トルクの低下によって、現在の運転領域Rが早閉じ運転領域REIVCになったとき、つまり、要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときには、要求トルクの低下により機関速度が所定量以上低下する可能性を判定し、この可能性が所定レベルよりも低いと判定したときに、進角遷移モードMTR-Aにして、最終的には早閉じモードMEIVCにする。一方、前記可能性が前記所定レベル以上であると判定したときには、遅閉じモードMLIVCに留まるようにして、進角遷移モードMTR-Aにはしない。本実施形態では、前記所定トルクは、本発明の第1所定トルクに相当するとともに、第1所定トルクに対して同一の機関速度において同じ値に設定された第2所定トルクに相当する。
【0116】
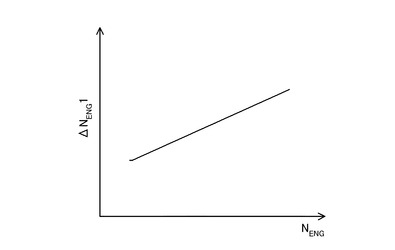
機関速度が所定量以上低下する可能性は、前記要求トルクが、前記所定トルク以上である状態から該所定トルクを超えて低下する際の低下量(前記トルク低下量dTQ)が大きいほど、高いと判定する。トルク低下量dTQは、スリップ量VSLIPが大きいほど大きくなり、スリップ量VSLIPが大きいほど、スリップ量VSLIPと変速機構4の減速比GRとから予測可能な機関速度低下量ΔNENGが大きくなるので、本実施形態では、その予測される機関速度低下量ΔNENGの大きさでもって、前記可能性を判定する。この場合、前記所定レベルは、所定の機関速度低下量ΔNENG1であり、この所定の機関速度低下量ΔNENG1の値は、図16に示すように、前記要求トルクが、前記所定トルク以上である状態から該所定トルクを超えて低下する際の機関速度NENGが高いほど、高く設定する(例えば機関速度NENGに比例して高く設定する)ことが好ましい。従って、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1よりも少ないと判定したときには、進角遷移モードMTR-Aにし、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1以上であるときには、遅閉じモードMLIVCに留まるようにすることになる。
【0117】
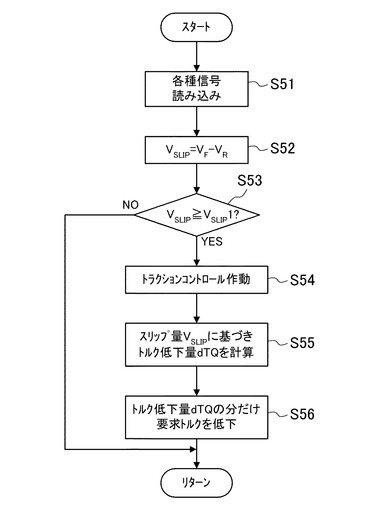
ここで、制御ユニット100のトラクションコントロールの処理動作を図17のフローチャートに基づいて説明する。
【0118】
最初のステップS51で、各種信号を読み込み、次のステップS52で、その読み込んだ信号のうちの前記車輪速度センサ7a,7bからの信号に基づいて、前輪7のスリップ量VSLIP(=VF−VR)を求める。
【0119】
次のステップS53では、前記スリップ量VSLIPが所定値VSLIP1以上であるか否かを判定する。このステップS53の判定がNOであるときには、そのままリターンする一方、ステップS53の判定がYESであるときには、ステップS54に進む。
【0120】
ステップS54では、トラクションコントロールを作動させ、次のステップS55で、前輪7のスリップ量VSLIPに基づきトルク低下量dTQを計算する。そして、次のステップS56で、そのトルク低下量dTQの分だけエンジン1の要求トルクを低下させ、しかる後にリターンする。
【0121】
従って、前輪7がスリップして、そのスリップ量が所定値以上であるときには、エンジン1の出力トルクが低下し、これにより、前輪7のグリップ力が回復してスリップ量が減少することになる。前記スリップ量が前記所定値よりも少なくなると、トラクションコントロールの作動は停止する。
【0122】
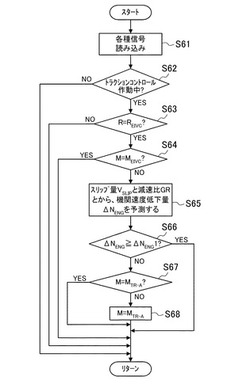
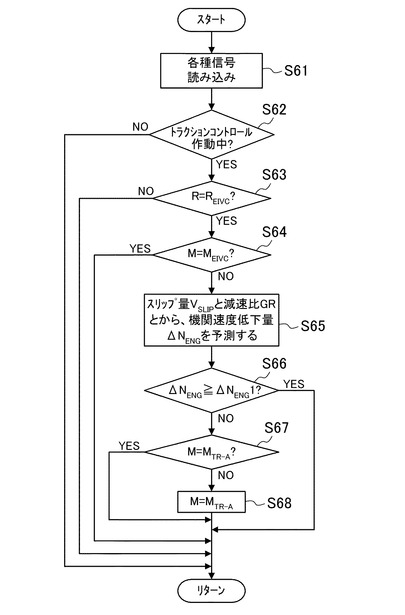
次に、制御ユニット100の、トラクションコントロール作動による要求トルク低下時の処理動作を図18のフローチャートに基づいて説明する。
【0123】
最初のステップS61で、各種信号を読み込み、次のステップS62で、トラクションコントロールが作動中であるか否かを判定する。このステップS62の判定がNOであるときには、そのままリターンする一方、ステップS62の判定がYESであるときには、ステップS63に進む。
【0124】
ステップS63では、現在の運転領域Rが早閉じ運転領域REIVCであるか否かを判定する。このステップS63の判定がNOであるときには、そのままリターンする一方、ステップS63の判定がYESであるときには、ステップS64に進む。
【0125】
ステップS64では、現在の運転モードMが早閉じモードMEIVCであるか否かを判定する。このステップS64の判定がYESであるときには、そのままリターンする一方、ステップS63の判定がNOであるときには、ステップS65に進む。
【0126】
ステップS65では、前記スリップ量VSLIPと変速機構4の減速比GRとから、機関速度低下量ΔNENGを予測する。
【0127】
次のステップS66では、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1(図16に示すように、機関速度NENGに対応する値)以上であるか否かを判定する。このステップS66の判定がYESであるとき(機関速度が所定量以上低下する可能性が所定レベル以上であるとき)には、そのままリターンする一方、ステップS66の判定がNOであるとき(機関速度が所定量以上低下する可能性が所定レベルよりも低いとき)には、ステップS67に進む。
【0128】
ステップS67では、現在の運転モードMが進角遷移モードMTR-Aであるか否かを判定する。このステップS67の判定がYESであるときには、そのままリターンする一方、ステップS67の判定がNOであるときには、ステップS68に進む。
【0129】
ステップS68では、現在の運転モードMを進角遷移モードMTR-Aに設定し、しかる後にリターンする。
【0130】
このように、トラクションコントロールの作動によりエンジン1の要求トルクが低下して、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換える際に、その要求トルクの低下により機関速度が所定量以上低下する可能性が判定され、この可能性が所定レベルよりも低い(機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1よりも少ない)と判定されたときには、運転モードを切り換えるべく、進角遷移モードMTR-Aにされ、前記可能性が前記所定レベル以上である(機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1以上である)と判定されたときには、遅閉じモードMLIVCのままとされる。
【0131】
従って、本実施形態では、進角遷移モードMTR-Aにおいて、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させるので、空気充填量が過剰にならず、異常燃焼を防止することができる(遅角遷移モードMTR-Rにおいても同様)。
【0132】
ここで、トラクションコントロールの作動によりエンジン1の要求トルクが低下して、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換える際に、機関速度が所定量以上低下する可能性を判定しないで運転モードを切り換えた場合、その切換え中に(進角遷移モードMTR-Aにおいて)、前輪7のグリップ力の回復によりスリップ量が急激に減少して機関速度が急低下する可能性があり、このように機関速度が低下すると、スロットル弁57による吸気絞り効果が低下するため、吸気圧が充分に低下しなくなる可能性がある。このため、進角遷移モードMTR-Aにおいては、気筒空気充填量の過剰による異常燃焼の発生を確実に防止するべく、スロットル弁57をより絞り気味にして、その絞り気味のスロットル開度を前提にして、制御パラメータを設定する必要が生じ、この結果、ポンプ損失が増大して、エンジン1の運転効率を低下させる可能性がある。
【0133】
しかし、本実施形態では、機関速度が所定量(前記吸気絞り効果に影響を及ぼすような量)以上低下する可能性を判定し、その可能性が所定レベルよりも低いと判定したときにのみ、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換えるので、スロットル弁57の一時的閉作動制御中に機関速度が所定量以上低下する可能性は低くなり、スロットル弁57による吸気絞り効果の低下により気筒空気充填量が過剰になる虞れを排除することができる。従って、進角遷移モードMTR-Aにおいて、開き気味のスロットル弁開度(遅角遷移モードMTR-Rで絞るときと略同じスロットル弁開度)を前提として、制御パラメータ(スロットル弁開度や吸気弁閉タイミング等)の設定を行なうことが可能となる。よって、ポンプ損失を低減することができて、エンジン1の運転効率を高く保つことが可能となる。
【0134】
なお、前記実施形態では、エンジン1の要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定するようにしたが、エンジン1の要求トルクが、前記所定トルク(これを第1所定トルクとする)以上である状態から、同一の機関速度で第1所定トルクよりも小さく設定された第2所定トルク(図8において特性線L2の下側に設定される、例えば特性線L2と平行な特性線)を超えて低下するときに、機関速度が所定量以上低下する可能性がより高くなるので、このときに該可能性を判定するようにしてもよい。この場合、エンジン1の要求トルクが第1所定トルク以下になっても第2所定トルクを超えて低下しないときには、機関速度が所定量以上低下する可能性を判定しないで運転モードが切り換えられることになる。
【0135】
ここで、エンジン1の要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときに、機関速度が所定量以上低下する現象が生じ得るのは、トラクションコントロールの作動時には限られない。例えば、マニュアル変速機の場合に、シフトアップ操作がなされたときに、そのシフトアップ操作により機関速度が所定量以上低下する可能性がある。従って、機関速度が所定量以上低下する可能性の判定は、トラクションコントロールの作動によりエンジン1の要求トルクが低下したときに限らず、機関速度が所定量以上低下する現象が生じ得るあらゆる場合に行うのがよい。
【産業上の利用可能性】
【0136】
本発明は、内燃機関、スロットル弁および吸気閉弁時期可変機構を備えた内燃機関システムの制御方法およびその内燃機関システムに有用であり、特に、吸気弁の閉弁時期を遅閉じ範囲から早閉じ範囲へ移行するときに、スロットル弁を一時的に絞る場合に有用である。
【符号の説明】
【0137】
1 エンジン(火花点火式内燃機関)
11 気筒
14 クランクシャフト
15 ピストン
17 燃焼室
18 吸気ポート(吸気通路)
21 吸気弁
30 吸気弁駆動機構(吸気閉弁時期可変機構)
55b 吸気マニホールドの吸気経路(吸気通路)
57 スロットル弁
58 スロットルアクチュエータ
100 制御ユニット(制御器)
【技術分野】
【0001】
本発明は、内燃機関、スロットル弁および吸気閉弁時期可変機構を備えた内燃機関システムの制御方法およびその内燃機関システムに関する技術分野に属する。
【背景技術】
【0002】
従来より、例えば特許文献1に示されているように、吸気弁のリフト量を目標空気充填量の増大に応じて大きくし、これに伴ない吸気弁の閉弁時期(吸気閉弁時期ともいう)を遅らせることで、気筒空気量を制御するようにすることが知られている。これにより、スロットル弁による空気量制御により生じるポンプ損失を抑制して、機関運転効率を向上させることができるようになる。
【0003】
一方、機関運転効率を高めるために、膨張比を高めることが知られている。膨張比を高めると、必然的に圧縮比が高くなる。そのため、高負荷低速領域において、異常燃焼が発生しやすくなる。この異常燃焼を防止するためには、気筒空気充填量を低下させることが有効である。そこで、例えば特許文献2に示されているように、有効圧縮比を低下させれば、ポンプ損失を増大することなしに空気充填量を低下させることができる。この有効圧縮比を低下させるには、吸気閉弁時期を、当該機関速度において空気充填量が最大となる時期に対して進角側または遅角側に離間させることで達成される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−264804号公報
【特許文献2】特開2001−159348号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、高負荷低速領域からは、通常、高負荷中速領域へと短期間に移行する。それに伴ない、空気充填量が最大となる吸気閉弁時期が高速で遅角する。これに対応して、高負荷低速領域に移行した時点で予め、吸気閉弁時期を遅らせることで、機関の加速性能を高く保つことが可能となる。
【0006】
従って、有効圧縮比を低下させるべく、低負荷から中負荷にかけての低速領域では、空気充填量が最大となる吸気閉弁時期よりも進角側に設定される早閉じ範囲内で、目標吸気量の増大に応じて遅角する時期に吸気弁を閉じる一方、高負荷低速領域では、空気充填量が最大となる吸気閉弁時期よりも遅角側に設定され且つ前記早閉じ範囲から離間した遅閉じ範囲内で、吸気弁を閉じるようにすることが望ましい。これにより、要求空気量が大きく変化すると、互いに離間した早閉じ範囲と遅閉じ範囲との間を、吸気閉弁時期が移行することになる。
【0007】
ここで、吸気弁は、一般的には、クランクシャフトにより駆動されて開閉する。すなわち、吸気弁の開閉駆動は、クランクシャフトに同期して回転するカムシャフト等のシャフトを介して行われる。このような動弁機構において、吸気閉弁時期を変化させるためには、連続的に変化させることが不可避となる。このため、吸気閉弁時期を、早閉じ範囲と遅閉じ範囲との間で移行させるには、その両範囲の間を連続的に変化させて移行する必要があり、この結果、その移行時に、空気充填量が最大となる時期になる瞬間が生じる。このとき、空気充填量が過剰となるので、それを防止するために、スロットル弁を絞ることによって、吸気圧を低下させることが考えられる。
【0008】
しかしながら、例えば車輪(駆動輪)のスリップによりトラクションコントロールが作動して要求トルクが低下して、吸気閉弁時期を遅閉じ範囲から早閉じ範囲へ移行する場合には問題が生じる。すなわち、遅閉じ範囲から早閉じ範囲への移行中に、車輪のグリップ力の回復により車輪スリップ量が急激に減少して機関速度が急低下する可能性があり、このように機関速度が低下すると、スロットル弁による吸気絞り効果が低下するため、吸気圧が充分に低下しなくなる可能性がある。このため、遅閉じ範囲から早閉じ範囲への移行時においては、気筒空気充填量の過剰による異常燃焼の発生を確実に防止するべく、スロットル弁をより絞り気味にして、その絞り気味のスロットル弁開度を前提にして、制御パラメータを設定する必要が生じる。この結果、ポンプ損失が増大して、機関運転効率を低下させる可能性がある。
【0009】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、吸気弁の閉弁時期を早閉じ範囲と遅閉じ範囲とに設定し、該閉弁時期の遅閉じ範囲から早閉じ範囲への移行中にスロットル弁を絞る場合に、開き気味のスロットル弁開度に設定することができるようにして、ポンプ損失を出来る限り低減しようとすることにある。
【課題を解決するための手段】
【0010】
前記の目的を達成するために、本発明では、往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、を備えた内燃機関システムの制御方法を対象として、前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁を閉じる工程と、前記要求トルクが、前記第1所定トルクよりも小さいときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁を閉じる工程と、前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定する工程と、前記可能性が所定レベルよりも低いと判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行するように前記吸気閉弁時期可変機構を制御するとともに、前記スロットル弁を一時的に閉方向に駆動する工程と、前記可能性が前記所定レベル以上であると判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御する工程と、を備えるようにした。
【0011】
このことにより、内燃機関の要求トルクが、第1所定トルク以上である状態から第2所定トルクを超えて低下する際、機関速度が所定量以上低下する可能性が判定され、その可能性が所定レベル以上であると判定されたときには、吸気弁の閉弁時期(吸気閉弁時期)が遅閉じ範囲に留まり、前記可能性が所定レベルよりも低いと判定されたときにのみ、吸気閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し、この移行時にスロットル弁が一時的に閉方向に作動する。これにより、スロットル弁の一時的閉作動制御中に機関速度が所定量以上低下する可能性は低くなり、スロットル弁による吸気絞り効果の低下により気筒空気充填量が過剰になる虞れを排除することができる。従って、要求トルクの低下に伴う吸気閉弁時期の遅閉じ範囲から早閉じ範囲への移行時に、開き気味のスロットル弁開度を前提として、制御パラメータ(スロットル弁開度や吸気閉弁時期等)の設定を行なうことが可能となる。よって、ポンプ損失を低減することができて、機関運転効率を高く保つことが可能となる。
【0012】
前記可能性を判定する工程は、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の低下量が大きいほど、前記可能性が高いと判定する工程である、ことが好ましい。
【0013】
これにより、要求トルクの低下量が大きいほど、機関速度が所定量以上低下する可能性が高くなって、吸気閉弁時期の遅閉じ範囲から早閉じ範囲への移行が制限される。特にトラクションコントロールの場合には、要求トルクの低下量が大きいほど、機関速度の低下量が大きくなるので、スロットル弁による吸気絞り効果の低下により気筒空気充填量が過剰になるのを適切に抑制することができる。
【0014】
前記所定レベルは、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の機関速度が高いほど、高く設定されていることが好ましい。
【0015】
このことで、吸気流速に比例した絞り効果の低下による気筒空気充填量の増大に適切に対応することが可能になる。
【0016】
前記内燃機関からの動力が伝達される車輪のスリップ量が所定値以上である際に、該内燃機関の要求トルクを低下させる工程を更に備えていてもよい。
【0017】
このようなトラクションコントロールの作動による要求トルクの低下時には、該低下により機関速度が低下することが予測される。この機関速度の低下量は、車輪スリップ量などから容易に予測することができ、機関速度が所定量以上低下する可能性を容易に判定することができる。
【0018】
本発明の別の態様は、往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記スロットル弁を駆動するスロットルアクチュエータと、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、前記スロットルアクチュエータおよび前記吸気閉弁時期可変機構を制御する制御器と、を備えた内燃機関システムであり、前記制御器は、前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、前記要求トルクが、前記第1所定トルクよりも小さいときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、且つ、前記可能性が所定レベルよりも低いと判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行し且つ前記スロットル弁が一時的に閉方向に作動するように前記吸気閉弁時期可変機構および前記スロットルアクチュエータを制御し、且つ、前記可能性が前記所定レベル以上であると判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御するものであるとする。
【0019】
この構成により、前記内燃機関システムの制御方法と同様の作用効果が得られる。
【発明の効果】
【0020】
以上説明したように、本発明の内燃機関システムの制御方法および内燃機関システムによると、内燃機関の要求トルクが、第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、前記可能性が所定レベルよりも低いと判定したときに、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動するようにし、前記可能性が前記所定レベル以上であると判定したときに、吸気弁の閉弁時期が遅閉じ範囲に留まるようにしたことにより、スロットル弁の一時的閉作動制御中に機関速度が低下する可能性は低くなり、吸気弁の閉弁時期の遅閉じ範囲から早閉じ範囲への移行時に、開き気味のスロットル弁開度を前提として、制御パラメータの設定を行なうことが可能となり、よって、ポンプ損失を低減することができて、高い機関運転効率を維持することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る内燃機関システムの概略構成図である。
【図2】前記内燃機関システムにおけるエンジンから車輪までの動力伝達装置を概略的に示す平面図である。
【図3】図1の実施形態に係る吸気弁駆動機構の具体的な構成を示す斜視図である。
【図4】前記吸気弁駆動機構の要部を示す断面図であり、(A)は大リフト制御状態においてバルブリフト量が0のときを示し、(B)は大リフト制御状態においてバルブリフト量が最大のときを示し、(C)は小リフト制御状態においてバルブリフト量が0のときを示し、(D)は小リフト制御状態においてバルブリフト量が最大のときを示す。
【図5】前記吸気弁駆動機構の設定例を示す図である。
【図6】制御ユニットによるエンジンの制御例を示すフローチャートである。
【図7】制御ユニットによるエンジンの制御例を示すフローチャートである。
【図8】図6のフローチャートにおいて運転領域を判定するための制御マップの例を示す特性図である。
【図9】図6のフローチャートによって設定される早閉じモードでの吸気弁閉タイミング(吸気弁の閉弁時期)の制御例を示す図である。
【図10】図6のフローチャートによって設定される早閉じモードでのスロットル開度の制御例を示す図である。
【図11】図6のフローチャートによる遅角遷移モードでの制御例を示すタイミングチャートである。
【図12】図7のフローチャートによって設定される遅閉じモードでの吸気弁閉タイミング(吸気弁の閉弁時期)の制御例を示す図であり、(A)はスロットル開度を並行して制御する場合を示し、(B)はスロットル開度を一定に維持する場合を示す。
【図13】図7のフローチャートによって設定される遅閉じモードでのスロットル開度の制御例を示す図であり、(A)はスロットル開度を並行して制御する場合を示し、(B)はスロットル開度を一定に維持する場合を示す。
【図14】図7のフローチャートによる進角遷移モードでの制御例を示すタイミングチャートである。
【図15】図6および図7のフローチャートを実行した制御例を示す吸気弁閉タイミング(吸気弁の閉弁時期)と目標空気充填量との関係のグラフであり、(A)は遅閉じモードでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合を示し、(B)は遅閉じモードでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合を示す。
【図16】エンジン回転速度(機関速度)に対する所定の機関速度低下量ΔNENG1の変化を示すグラフである。
【図17】制御ユニットのトラクションコントロールの処理動作を示すフローチャートである。
【図18】制御ユニットの、トラクションコントロール作動による要求トルク低下時の処理動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態の説明は、本質的に例示に過ぎず、本発明、その適用物或いはその用途を制限することを意図するものではない。
【0023】
図1は、本発明の実施形態に係る内燃機関システムの概略構成図である。
【0024】
図1を参照して、同内燃機関システムは、エンジン1、エンジン1に付随する様々なアクチュエータ、様々なセンサ、および該センサからの信号に基づきアクチュエータを制御する制御器としての制御ユニット100を有する。
【0025】
エンジン1は、火花点火式内燃機関であって、4つの気筒11を有するものである(図2参照)が、いかなる数の気筒11を有するものであってもよい。エンジン1は、自動車等の車両に搭載され、そのクランクシャフト14は、図2に示すように、前記車両に搭載された動力伝達装置2を介して前記車両の左右の前輪7に連結されており、エンジン1の動力が、動力伝達装置2によって前輪7に伝達されて、車両を推進する。
【0026】
前記動力伝達装置2は、トルクコンバータ3および変速機構4を含む自動変速機5と、ディファレンシャル機構6とを有している。トルクコンバータ3は、図示は省略するが、エンジン1のクランクシャフト14と接続されてエンジン1の出力が入力されるポンプインペラと、このポンプインペラに対峙するタービンとを有し、このタービンの回転が変速機構4に出力されるようになっている。
【0027】
前記変速機構4は、図示は省略するが、タービンの回転が入力される入力軸と、ディファレンシャル機構6を介して前輪7に連結される出力軸と、これら入出力軸間に設けられた、例えば遊星歯車機構等の変速歯車機構と、該変速歯車機構の変速比を変更するための複数のクラッチとを有している。そして、変速機構4は、前記クラッチの締結および解放により、例えば前進第1速から第5速まで変速可能に構成される。
【0028】
前記左右の前輪7には、当該前輪7の車輪速度を検出する車輪速度センサ7aがそれぞれ設けられており、前記車両における左右の後輪8には、当該後輪8の車輪速度を検出する車輪速度センサ8aがそれぞれ設けられている。
【0029】
前記エンジン1は、13以上の幾何学的圧縮比を持ち、この幾何学的圧縮比は、14以上16以下であるのが好ましい。幾何学的圧縮比が大きいということは、膨張比が大きいことを意味するので、幾何学的圧縮比が大きいほど、エンジン1の運転効率は上がる。そこで、本実施形態では、幾何学的圧縮比を13以上に設定し、点火リタード等の方法によってノッキングを回避しつつ高トルクと燃費の大幅な低減とを図ることとしている。
【0030】
尤も、圧縮比が高いほど、異常燃焼発生の可能性が高まるので、有効圧縮比を小さくする、すなわち、気筒空気充填量を下げる必要が生じる。そうなると、気筒容積の割に得られる出力が低下するために、エンジン1の重量比で見たときの効率は低下し、また、エンジン1の、車両のエンジンルーム内への搭載性に問題が生じる。従って、幾何学的圧縮比の上限は、16以下にするのが好ましい。
【0031】
エンジン1は、シリンダブロック12と、その上に載置されるシリンダヘッド13とを備えており、それらの内部に、後述のピストン15と共に燃焼室17を規定する4つの気筒11が形成されている。周知のように、シリンダブロック12には、ジャーナルやベアリング等によりクランクシャフト14が回転自在に支持されており、このクランクシャフト14がピストン15に対し、コネクティングロッド16を介して連結されている。
【0032】
ピストン15は、各気筒11内に摺動自在に嵌挿されて燃焼室17を区画している。シリンダヘッド13には、気筒11毎に2つの吸気ポート18(図1には1つのみ示す)が形成されて、それぞれ燃焼室17に連通している。同様に、シリンダヘッド13には、気筒11毎に2つの排気ポート19(図1には1つのみ示す)が形成されて、それぞれ燃焼室17に連通している。シリンダヘッド13には、吸気弁21および排気弁22が、それぞれ、吸気ポート18および排気ポート19を燃焼室17から遮断(閉)可能なように配設されている。吸気弁21は、動弁装置としての吸気弁駆動機構30により、排気弁22は排気弁駆動機構40により、それぞれ駆動されて、所定のタイミングで往復動して、吸気ポート18および排気ポート19をそれぞれ開閉するものである。
【0033】
吸気弁駆動機構30は、後述のインナシャフト105を有し、排気弁駆動機構40は、排気カムシャフト41を有する。インナシャフト105および排気カムシャフト41は、クランクシャフト14により、周知のチェーン/スプロケット機構等の動力伝達機構を介して、該クランクシャフト14に同期して駆動される。この動力伝達機構は、周知のように、クランクシャフト14が二回転する間に、インナシャフト105および排気カムシャフト41が一回転するように構成される。吸気弁21および排気弁22は、インナシャフト105および排気カムシャフト41によりそれぞれ駆動される、つまりクランクシャフト14により、該クランクシャフト14に同期して駆動されることになる。尚、吸気弁駆動機構30については、後に詳細に説明する。
【0034】
インナシャフト105の位相角は、位相センサ35により検出され、その位相センサ35による検出信号θVCT_Aが制御ユニット100に入力される。
【0035】
シリンダヘッド13における各気筒11の中心軸線上には、点火プラグ51が配設されている。この点火プラグ51は、例えばねじ等の周知の構造によってシリンダヘッド13に取り付けられている。点火プラグ51による点火を行わせる点火システム52は、制御ユニット100からの制御信号SADを受けて、点火プラグ51が所望の点火タイミングで火花を発生するよう、それに通電する。
【0036】
シリンダヘッド13の一側(図例では吸気側)には、燃料噴射弁53が、例えばブラケットを使用する等の周知の構造で取り付けられている。この燃料噴射弁53の先端は、上下方向については2つの吸気ポート18の下方に、また、水平方向についてはそれら2つの吸気ポート18の中間に位置して、燃焼室17内に臨んでいる。
【0037】
燃料噴射弁53に燃料を供給する燃料供給システム54は、図示は省略するが、燃料噴射弁53に燃料を昇圧して供給する高圧ポンプと、この高圧ポンプに燃料タンクから燃料を送給する配管やホース等と、燃料噴射弁53を駆動する電気回路とを備えている。この電気回路は、制御ユニット100からの制御信号FPDを受けて燃料噴射弁53のソレノイドを作動させ、所定のタイミングで所望量の燃料を燃焼室17内に噴射させる。
【0038】
吸気ポート18は、吸気マニホールド55内の吸気経路55b(吸気ポート18と共に、燃焼室17内へ導入される空気が通過する吸気通路を構成する)によってサージタンク55aに連通している。図示しないエアクリーナからの吸気流は、スロットルボデー56を通過してサージタンク55aに供給される。スロットルボデー56にはスロットル弁57が配置されており、周知のようにサージタンク55aに向かう吸気流を絞って、その流量を調整する。そして、スロットルアクチュエータ58が、制御ユニット100からの制御信号TVODを受けて、スロットル弁57を駆動してその開度(以下、スロットル開度という)を調整する。
【0039】
排気ポート19は、排気マニホールド60内の排気経路によって周知のように排気管内の通路に連通している。排気マニホールド60よりも下流の排気通路には、一つ以上の触媒コンバータ61を有する排気ガス浄化システムが配置される。触媒コンバータ61は、周知の三元触媒、リーンNOx触媒、酸化触媒等とすることができ、それ以外にも、特定の燃料制御手法による排気ガス浄化の目的にかなうものであれば、いかなるタイプの触媒としてもよい。
【0040】
また、排気ガスの一部を吸気系に循環させる(以下、EGRともいう)ために、吸気マニホールド55(スロットル弁57よりも下流側)と排気マニホールド60との間がEGRパイプ62によって接続されている。排気側の圧力は吸入側よりも高いので、排気ガスの一部は、EGRパイプ62を介して吸気マニホールド55に流れ込むようになり(この流れ込むガスをEGRガスと呼ぶ)、吸気マニホールド55から燃焼室17に吸入される新気と混ざることになる。EGRパイプ62にはEGR弁63が配設され、EGRガスの流量を調整するようになっている。そして、EGR弁アクチュエータ64が、制御ユニット100からの制御信号EGROPENを受けて、EGR弁63を駆動してその開度を調整する。
【0041】
制御ユニット100は、周知のマイクロコンピュータをベースとするコントローラであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、電気信号の入出力をする入出力(I/O)バスとを備えている。
【0042】
制御ユニット100は、エアフローセンサ71から吸気流量AF、吸気圧センサ72から吸気マニホールド圧MAP、クランク角センサ73からクランク角パルス信号、というように種々の入力を受け入れる。制御ユニット100は、例えば、クランク角パルス信号に基づいて、エンジン回転速度(以下、機関速度ともいう)NENGを計算する。また、制御ユニット100は、酸素濃度センサ74から排気ガスの酸素濃度EGOについての入力も受け入れる。さらに、アクセルペダルの踏み込み量を検出するアクセル開度センサ75からのアクセル開度信号αを受け入れる。また、制御ユニット100は、自動変速機5の変速機構4の出力軸の回転速度を検出する車速センサ76からの車速信号VSPを受け入れる。
【0043】
より具体的に、制御ユニット100は、前記のような入力に基づいて、以下のようなエンジン1の制御パラメータを計算する。例えば、所望のスロットル開度TVO、燃料噴射量FP、点火タイミングSA、バルブ位相角θVCT、EGR量QEGR(EGRガス流量)等である。そして、それら制御パラメータに基づいて、対応する制御信号として、スロットル開度信号TVOD、燃料噴射パルス信号FPD、点火パルス信号SAD、バルブ位相角信号θVCT_D、およびEGR開度信号EGROPENを、スロットルアクチュエータ58、燃料供給システム54、点火システム52、後述の吸気カムシャフト位相可変機構32、およびEGR弁アクチュエータ64にそれぞれ出力する。
【0044】
次に、図3および図4を参照して、本実施形態に係る吸気弁駆動機構30の詳細について説明する。図3は、図1の実施形態に係る吸気弁駆動機構30の具体的な構成を示す斜視図であり、図4は、図1の吸気弁駆動機構30の要部を示す断面図である。図4において、(A)は大リフト制御状態においてバルブリフト量が0のときを示し、(B)は大リフト制御状態においてバルブリフト量が最大のときを示し、(C)は小リフト制御状態においてバルブリフト量が0のときを示し、(D)は小リフト制御状態においてバルブリフト量が最大のときを示している。
【0045】
本実施形態の吸気弁駆動機構30は、吸気カムシャフト位相可変機構(可変カムタイミングメカニズム;以下、VCT機構という)32を備えており、これはチェーンドライブ機構によってクランクシャフト14に駆動連結されている。このチェーンドライブ機構は、ドリブンスプロケット104の他に、図示しないが、クランクシャフト14のドライブスプロケットと、それら両スプロケットに巻き掛けられたチェーンとを備える。
【0046】
VCT機構32は、ドリブンスプロケット104に一体に回転するように固定されたケースと、それに収容され且つインナシャフト105に一体に回転するように固定されたロータとを有する。ケースとロータとの間には複数の液圧室が、インナシャフト105の中心軸X(図4に示す)の周りに(周方向に)並んで形成される。そして、ポンプにより加圧された液体(例えばエンジンオイル)が各々の液圧室に選択的に供給されて、互いに対向する液圧室の間に圧力差を形成する。
【0047】
VCT機構32を制御するVCT制御ユニットとして機能する制御ユニット100が、VCT機構32の電磁バルブ32aに制御信号θVCT_Dを出力し、この制御信号θVCT_Dを受けて、電磁バルブ32aが液圧のデューティ制御をすることで、前記液圧室に供給する液体の流量や圧力等を調整する。これにより、スプロケット104とインナシャフト105との間の実際の位相差が変更され、それによって、周知のようにインナシャフト105の所望の回転位相が達成される。なお、制御ユニット100とは別構成の制御ユニットでVCT制御ユニットを構成してもよい。
【0048】
インナシャフト105は、図4(A)〜(D)に示すように各々の気筒11に対応して一体的に設けられたディスク形状の偏心カム106を有する。この偏心カム106は、インナシャフト105の軸芯(中心軸X)から偏心して設けられ、VCT機構32により規定される位相で回転する。この偏心カム106の外周にはリング状アーム107の内周が回転自在に嵌め合わされており、インナシャフト105がその中心軸X周りに回転すると、リング状アーム107は、同じ中心軸Xの回りを公転しながら偏心カム106の中心の周りを回動する。
【0049】
また、前記インナシャフト105には、気筒11毎にロッカーコネクタ110が配設されている。このロッカーコネクタ110は円筒状で、インナシャフト105に外挿されて同軸に軸支され、換言すれば、その中心軸X周りに回動可能に支持されている一方、該ロッカーコネクタ110の外周面はベアリングジャーナルとされ、シリンダヘッド13に配設されたベアリングキャップ(図示せず)によって回転可能に支持されている。
【0050】
前記ロッカーコネクタ110の両端には、第1および第2のロッカーカム111、112がそれぞれ一体的に設けられている。両者の構成は同じなので、図4(A)〜(D)にはロッカーカム111について示すが、このロッカーカム111は、カム面111aと円周状のベース面111bとを有し(図4(D)参照)、それらはいずれもタペット115の上面に摺接するようになっている。ロッカーカム111は、連続的には回転せず、揺動運動することを除いては、一般的な吸気弁駆動機構のカムと同様にタペット115を押圧してバルブを開くものである。タペット115はバルブスプリング116で支えられている。バルブスプリング116は、周知のように保持器117、118の間に支持されている。
【0051】
再度、図3を参照すると、インナシャフト105およびロッカーカム部品110〜112の組立体と並んで、その上方にコントロールシャフト120が配置されている。このコントロールシャフト120は、図示しないベアリングによって回転可能に支持されており、その長手方向の中央付近には、外周面から突出する同軸状のウォームギヤ121が一体的に設けられている。
【0052】
ウォームギヤ121はウォーム122と噛合している。このウォーム122は、可変バルブリフト機構(VVL)のアクチュエータである例えばステッピングモータ123の出力軸に固定されている。そして、制御ユニット100からの制御信号(バルブリフト量信号)θVVL_Dを受けたステッピングモータ123の作動により、コントロールシャフト120を所望の位置に回動させることができる。こうして回動されるコントロールシャフト120には、気筒11毎のコントロールアーム131が取り付けられており、これらコントロールアーム131は、コントロールシャフト120の回動によって一体的に回動される。
【0053】
また、そうして回動されるコントロールアーム131は、コントロールリンク132によってリング状アーム107に連結されている。すなわち、コントロールリンク132の一端部は、コントロールピボット133によってコントロールアーム131の先端部に回転自在に連結され、該コントロールリンク132の他端部は、コモンピボット134によってリング状アーム107に回転自在に連結されている。
【0054】
ここで、コモンピボット134は、前記のようにコントロールリンク132の他端部をリング状アーム107に連結するとともに、このリング状アーム107を貫通してそれをロッカーリンク135の一端部にも回転自在に連結している。そして、このロッカーリンク135の他端部が、ロッカーピボット136によってロッカーカム111に回転自在に連結されており、これによりリング状アーム107の回転がロッカーカム111に伝えられるようになっている。
【0055】
より具体的に、インナシャフト105が回転して、これと一体に偏心カム106が回転するとき、図4(A)および(C)に示すように偏心カム106が下側に位置すれば、リング状アーム107も下側に位置するようになり、一方、図4(B)および(D)に示すように偏心カム106が上側に位置すれば、リング状アーム107も上側に位置するようになる。
【0056】
その際、リング状アーム107とコントロールリンク132とを連結するコモンピボット134の位置は、コントロールピボット133の位置と、偏心カム106およびリング状アーム107の共通中心位置との、3者相互の位置関係によって規定されるから、図示のようにコントロールピボット133の位置が変化しない(コントロールシャフト120が回動しない)とすれば、コモンピボット134は、偏心カム106およびリング状アーム107の共通中心周りの回転のみに対応して概略上下に往復動作するようになる。
【0057】
そのようなコモンピボット134の往復動作は、ロッカーリンク135によって第1のロッカーカム111に伝えられ、該第1のロッカーカム111を、ロッカーコネクタ110で連結された第2のロッカーカム112と共に中心軸X周りに揺動させる。こうして揺動するロッカーカム111は、図4(B)および(C)に示すように、カム面111aがタペット115の上面に接触する間は、当該タペット115をバルブスプリング116のばね力に抗して押し下げ、このタペット115が吸気弁21を押し下げて、吸気ポート18を開かせる。
【0058】
一方、図4(A)および(D)に示すように、ロッカーカム111のベース面111bがタペット115の上面に接触するとき、タペット115は押し下げられない。これは、中心軸Xを中心とするロッカーカム111のベース面111bの半径が、その中心軸Xとタペット115の上面との間隔以下に設定されているからである。
【0059】
上述の如きコントロールピボット133と、コモンピボット134と、偏心カム106およびリング状アーム107の共通中心との相互の位置関係において、コントロールピボット133の位置が変化すれば、これにより3者相互の位置関係に変化が生じ、コモンピボット134は前記とは異なる軌跡を描いて往復動作するようになる。
【0060】
よって、ステッピングモータ123の作動によりコントロールシャフト120およびコントロールアーム131を回転させて、コントロールピボット133の位置を変えることにより、ロッカーカム111,112の揺動範囲を変更することができる。例えば、コントロールアーム131を図4において時計回りに回動させて、コントロールピボット133を、図4(A)に示す位置から図4(C)に示すように左斜め上側にずらすと、ロッカーカム111の揺動範囲は、相対的にベース面111bがタペット115の上面に接触する傾向の強いものとなる。
【0061】
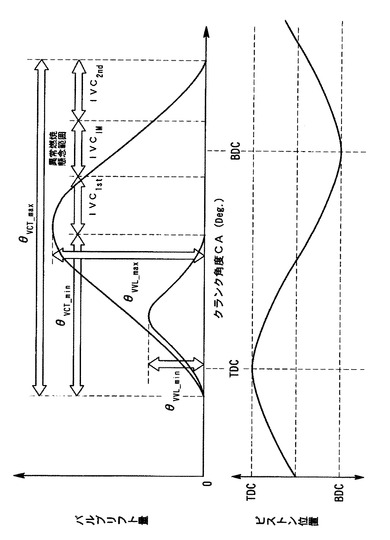
図5は、本実施形態に係る吸気弁駆動機構30の設定例を示す図である。
【0062】
図5を参照して、本実施形態では、上述した吸気弁駆動機構30およびこれに関連する構成部品(特にVCT機構32および可変バルブリフト機構)により、バルブリフト量θVVLは、例えばθVVL_minからθVVL_maxまでの範囲で、各気筒11への目標空気充填量CEの増加に応じて増大するように制御されるとともに、吸気弁21の閉弁時期(吸気弁閉タイミングともいう)は、バルブリフト量θVVLの増大に応じてθVCT_minからθVCT_maxの範囲で連続的に遅角する。吸気弁21の開弁時期および閉弁時期は、必要に応じていかなる組合せも可能であり、例えば、バルブリフト量を0にするいわゆるロストモーション動作も可能である。このように吸気弁駆動機構30(特にVCT機構32および可変バルブリフト機構)は、吸気弁21の閉弁時期を制御する吸気閉弁時期可変機構を構成することになる。
【0063】
本実施形態では、例えばエンジン回転速度NENGが1500rpmの時の吸気行程において吸気弁21を開閉する際、吸気弁21の開弁時期については、殆どの運転領域で排気上死点直前(クランク角度で例えば20°CA)から開弁を開始し、エンジン1の要求トルク(目標トルクTQ)に応じて閉弁時期を変更するようにしている。
【0064】
ここで、本実施形態では、吸気弁21の閉弁時期として、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側に設定される第1閉弁タイミング範囲IVC1st(早閉じ範囲に相当)と、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側に設定され且つ前記第1閉弁タイミング範囲IVC1stから離間した第2閉弁タイミング範囲IVC2nd(遅閉じ範囲に相当)とが設定されており、吸気弁21が第1閉弁タイミング範囲IVC1stで閉じるように運転される早閉じモードMEIVCと、吸気弁21が第2閉弁タイミング範囲IVC2ndで閉じるように運転される遅閉じモードMLIVCと、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCに切り換える進角遷移モードMTR-Aと、運転モードを早閉じモードMEIVCから遅閉じモードMLIVCに切り換える遅角遷移モードMTR-Rとを設定可能に構成されている。なお、第1および第2閉弁タイミング範囲IVC1st,IVC2ndは、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングを挟んで進角側および遅角側にそれぞれ設定されており、詳しくは後述するように、必ずしも吸気下死点を基準として設定されるものではない(後述する図15参照)。
【0065】
前記遅閉じモードMLIVCは、エンジン1における要求トルク(目標トルクTQ、つまり目標空気充填量CEと言い換えることができる)と機関速度(エンジン回転速度NENG)とからなるエンジン運転状態が高負荷低速側の運転領域にあるとき、つまりエンジン1の要求トルクが、機関速度毎に定まる所定トルク(図8の特性線L1又はL2参照)以上であるとき(目標空気充填量CEが所定空気充填量以上であるとき)に選択されるモードであり、この遅閉じモードMLIVCでは、吸気弁21のバルブリフト量θVVLを大きくし、このバルブリフト量θVVLに対応して吸気弁閉タイミングを例えば吸気下死点よりも遅角する。以下、前記高負荷低速側の運転領域のことを、遅閉じ運転領域という。
【0066】
一方、前記早閉じモードMEIVCは、前記エンジン運転状態が前記遅閉じ運転領域よりも低負荷ないし高速側の運転領域にあるとき、つまりエンジン1の要求トルクが、前記所定トルクよりも小さいとき(目標空気充填量CEが所定空気充填量よりも少ないとき)に選択されるモードであり、この早閉じモードMEIVCでは、吸気弁21のバルブリフト量θVVLを小さくし、このバルブリフト量θVVLに対応して吸気弁閉タイミングを例えば吸気下死点よりも進角する。以下、前記遅閉じ運転領域よりも低負荷ないし高速側の運転領域のことを、早閉じ運転領域という。
【0067】
なお、本実施形態では、後述の如く、運転モードの切換にヒステリシスを設けているために、遅閉じ運転領域から早閉じ運転領域への切換え時と、早閉じ運転領域から遅閉じ運転領域への切換え時とで、両運転領域(前記所定トルク)が変化することになる(図8参照)。
【0068】
前述の如く、早閉じモードMEIVCが設定される第1閉弁タイミング範囲IVC1stは、遅閉じモードMLIVCが設定される第2閉弁タイミング範囲IVC2ndよりも進角し且つ離間している。これら閉弁タイミング範囲IVC1st,IVC2ndの間には、遅閉じモードMLIVCおよび早閉じモードMEIVCでは吸気弁21が閉じることのない中間閉弁タイミング範囲IVCIMが設定されている。後述の如く、遅角遷移モードMTR-Rおよび進角遷移モードMTR-Aにおいて、吸気弁閉タイミングが中間閉弁タイミング範囲IVCIMとなる。
【0069】
次に、上述のような運転モードを設定している理由について説明する。
【0070】
エンジン1の出力を高め、燃費を低減するために膨張比を高くする一方で、異常燃焼発生を抑制するために、吸気弁21の閉弁時期を吸気下死点よりも進角または遅角させて、有効圧縮比を低くする方法として、吸気弁21の閉弁時期を吸気下死点よりも進角する早閉じでエンジン1を運転制御する場合には、図4(A)および(B)から明らかなように、ロッカーカム111の揺動量は、小さくなり、バルブスプリング116の抵抗も小さくなるので、低負荷側では好ましいものとなる。しかし、要求負荷の増加に応じて、機関速度が上昇するのに連れて、所定の気筒空気充填量を得るための吸気弁21の閉弁時期は遅角する。また、機関速度上昇に伴い、気筒内の混合気の流動性が高まる等の理由により異常燃焼発生可能性は低くなるので、目標とする吸気弁閉タイミングの進角側への制限量は低下する。従って、吸気弁閉タイミングIVCを、機関速度上昇に伴い高い速度で遅角させる必要がある。しかしながら、吸気弁駆動機構30の応答遅れにより、吸気弁21の閉弁時期を目標に沿って高い速度で遅角させることは困難であるので、実際の吸気弁閉タイミングが、目標とする吸気弁閉タイミングよりも進角側となって、気筒空気充填量の低下を招く虞れがある。
【0071】
他方、吸気弁閉タイミングIVCを、当該エンジン回転速度NENGにおいて気筒空気充填量が最大となるタイミングよりも遅角側に設定した場合、ピストン15が下死点に移動するまで気筒11内に空気を導入する。更に下死点を越えてピストン15が上昇中に、気筒内の空気を吸気通路内に戻すことで有効圧縮比を低減する。これを実現するためには、吸気弁21のバルブリフト量および動弁範囲を最大値近傍まで大きく設定する必要があり(図5参照)、機械的損失が大きくなる懸念がある。
【0072】
そこで、本実施形態では、第1閉弁タイミング範囲IVC1stと第2閉弁タイミング範囲IVC2ndとを設定し、高圧縮比エンジンにおいて、可及的に連続的な運転領域で膨張比を高めるとともに、異常燃焼懸念の高い中間閉弁タイミング範囲IVCIMでは、ノッキング対策を講じることによって、プリイグニション等の異常燃焼を回避しつつ、出力の向上と燃費の低減とを図ることとしているのである。
【0073】
このような構成を実現するため、本実施形態では、図6および図7のフローチャートが実行されるように設定されている。
【0074】
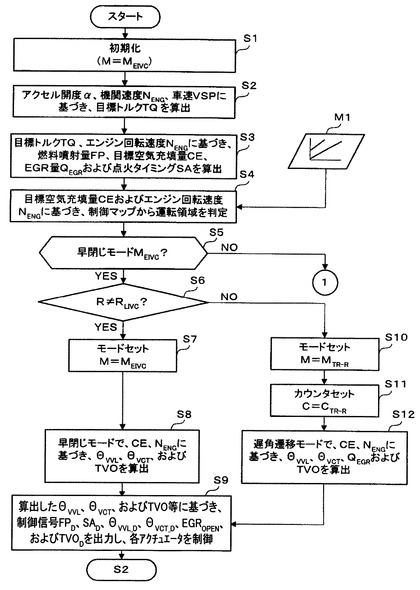
図6および図7は、本発明の実施形態に係るエンジン1の制御例を示すフローチャートである。
【0075】
まず、図6を参照して、制御ユニット100は、最初に諸設定の初期化を実行する(ステップS1)。この初期化において、制御ユニット100は、現在の運転モードMを早閉じモードMEIVCに設定する。
【0076】
次いで、制御ユニット100は、アクセル開度センサ75からのアクセル開度信号α、クランク角パルス信号に基づくエンジン回転速度NENG、車速センサ76からの車速信号VSPを読み取りまたは算出し、これらの情報に基づいて、目標トルクTQを算出する(ステップS2)。
【0077】
次いで、制御ユニット100は、目標トルクTQおよびエンジン回転速度NENGに基づき、燃料噴射量FP(或いは空燃比)、目標空気充填量CE、EGR量QEGR、および点火タイミングSAを算出する(ステップS3)。
【0078】
次いで、制御ユニット100は、予め前記メモリに記憶された制御マップM1のデータを読み取り、この制御マップM1に基づいて目標空気充填量CEとエンジン回転速度NENGの値とに適合する現在の運転領域Rを判定する(ステップS4)。この結果、制御ユニット100は、運転領域Rを図8に示すように判定する。
【0079】
図8は、図6のフローチャートにおいて判定される運転領域の例を示す特性図である。
【0080】
図8に示すように、本実施形態では、エンジン回転速度NENGに比例する特性線L1,L2(前記所定トルク)を設定し、特性線L1に対して高負荷低速側である遅閉じ運転領域RLIVC(特性線L1上も含む)、つまりエンジン1の要求トルクが所定トルク以上である(目標空気充填量が所定空気充填量以上である)遅閉じ運転領域RLIVCでは遅閉じモードMLIVCが、特性線L2に対して低負荷ないし高速側の早閉じ運転領域REIVC、つまりエンジン1の要求トルクが所定トルクよりも小さい(目標空気充填量が所定空気充填量よりも少ない)早閉じ運転領域REIVCでは、早閉じモードMEIVCが、それぞれ選定されるように設定されている。図示の例において、特性線L1と特性線L2との間の過渡領域RTRは、ヒステリシスを設けて運転モードの切換に用いられる領域であり、早閉じ運転領域REIVCから要求負荷が高くなっても、特性線L1に達するか又は特性線L1を越えるまでは、運転モードは早閉じモードMEIVCが維持され、遅閉じ運転領域RLIVCから要求負荷が低くなっても、特性線L2を越えるまでは、運転モードは遅閉じモードMLIVCが維持される。なお、ヒステリシスを設ける必要は必ずしもないが、過渡的で不安定な進角遷移モードMTR-Aや遅角遷移モードMTR-Rが生じる機会を出来る限り少なくするためには、ヒステリシスを設けることが好ましい。
【0081】
図6を参照して、制御ユニット100は、現在の運転モードMが早閉じモードMEIVCであるか否かを判定する(ステップS5)。仮に運転モードMが早閉じモードMEIVCである場合、制御ユニット100は、さらに現在の目標空気充填量CEおよびエンジン回転速度NENGに基づき現在の運転領域Rを判定し、現在の運転領域Rが遅閉じ運転領域RLIVC以外であるか、すなわち要求負荷に基づく吸気弁閉タイミングIVCが第2閉弁タイミング範囲IVC2nd以外にあるか否かを判定する(ステップS6)。現在の運転領域Rが遅閉じ運転領域RLIVC以外である場合、制御ユニット100は、運転モードMを早閉じモードMEIVCに設定する(ステップS7)。次いで、制御ユニット100は、この早閉じモードMEIVCでの目標空気充填量CE、エンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、スロットル開度TVOを算出し(ステップS8)、この算出したバルブリフト量θVVL、開弁期間θVCTおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FP、EGR量QEGRおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、TVOD、FPD、EGROPENおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する(ステップS9)。その後、ステップS2に移行し、上述した制御を繰り返す。
【0082】
図9は、図6のフローチャートによって設定される早閉じモードMEIVCでの吸気弁閉タイミングの制御例を示す図である。
【0083】
図9を参照して、同図に示した制御例では、運転領域Rが遅閉じ運転領域RLIVC以外、すなわち吸気弁12の閉弁時期が第1閉弁タイミング範囲IVC1stで運転される場合、エンジン回転速度NENGが高くなるほど、吸気弁21の閉弁時期は遅角する。また、目標空気充填量CEが増加するほど、吸気弁21の閉弁時期は遅角する。この結果、第1閉弁タイミング範囲IVC1stで運転される場合では、吸気弁21の閉弁時期が遅角することによって、空気充填量CEを増加させ、要求トルクに見合うトルクを出力できるようになっている。
【0084】
図10は、図6のフローチャートによって設定される早閉じモードMEIVCでのスロットル開度の制御例を示す図である。
【0085】
図10を参照して、同図に示した制御例では、特性線L1と平行にエンジン回転速度NENGに比例する特性線L3を低負荷側に設定している。特性線L3は、図8に示す特性線L2よりも低負荷ないし高速側であってもよく、特性線L2と同じかまたは特性線L2に対して高負荷ないし低速側であってもよい。この特性線L3に対して低負荷ないし高速側の運転領域では、スロットル開度TVOは、全開になっており、目標空気充填量CEは、専ら、吸気弁21の閉弁時期で制御されるようになっている。このため、充分な空気充填量CEを確保し、ポンプ損失が生じないように制御することが可能になる。他方、特性線L1と特性線L3との間では、要求負荷が高まるに連れて、或いはエンジン回転速度NENGが低減するのに連れて、スロットル開度TVOを小さくするように制御される。このため、エンジン運転状態が、低中負荷中高速運転領域から運転モードMを遅閉じモードMLIVCに設定する必要のある高負荷低速運転領域に近づくに連れて、スロットル弁57下流における、吸気ポート18を含む吸気通路内の圧力を低減する。これにより、高圧縮比エンジンを採用した本実施形態において、運転モードMを切り換える過渡的で不安定な運転領域であっても、吸気弁閉タイミングの変化に伴い一時的に気筒空気充填量が過大となることを抑制して、プリイグニション等の異常燃焼を回避することができる。
【0086】
次に、図6を参照して、ステップS6において、現在の運転領域Rが遅閉じ領域RLIVCである場合(ステップS6においてNOの場合)、制御ユニット100は、運転モードMを遅角遷移モードMTR-Rに設定する(ステップS10)。次いで、制御ユニット100は、所定のカウント時間CTR-Rをカウント値CTRとして設定し(ステップS11)、この遅角遷移モードMTR-Rでの目標空気充填量CE、エンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、EGR量QEGR 、およびスロットル開度TVOを算出する(ステップS12)。所定のカウント時間CTR-Rを設けているのは、吸気弁駆動機構30による吸気弁閉タイミング設定が切り換わるまでの間、一時的に目標空気充填量CEを低減してプリイグニション等の異常燃焼を回避するためである。
【0087】
ステップS12が実行された後は、ステップS9に移行することにより、遅角遷移モードMTR-Rで算出したバルブリフト量θVVL、開弁期間θVCT、EGR量QEGRおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FPおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、EGROPEN、TVOD、FPDおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する。その後、ステップS2に移行し、上述した制御を繰り返す。
【0088】
図11は、図6のフローチャートによる遅角遷移モードMTR-Rでの制御例を示すタイミングチャートである。
【0089】
図11に示すように、遅角遷移モードMTR-Rでの制御が実行されると、その開始タイミングt0からカウント値CTRがデクリメントされ(図7のステップS27参照)、タイミングt2で終了する。吸気弁駆動機構30は、カウントを開始したタイミングt0から吸気弁閉タイミングを第2閉弁タイミング範囲IVC2ndに移動するために、遅角を開始する。この遅角遷移モードMTR-Rにおいては、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が遅角するのに連れて(例えば遅角に比例して)低減し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が遅角するのに連れて増大する。これにより、当該気筒11において、吸気弁21がプリイグニション等の異常燃焼が懸念される中間閉弁タイミング範囲IVCIMに入り込んだとしても、スロットル弁57の一時的閉作動による吸気通路内の圧力の低下によって異常燃焼が防止される。
【0090】
また、遅角遷移モードMTR-Rにおいて、EGR弁アクチュエータ64がEGR弁63を一時的に開方向に駆動して、EGR弁63の開度(EGR量QEGR)を増大させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が遅角するのに連れて(例えば遅角に比例して)増大し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が遅角するのに連れて低減する。前記EGR弁63の一時的開動作により、筒内残留ガスである内部EGRよりも低温の外部EGRが筒内に導入されるので、より確実に異常燃焼を回避することが可能になる。
【0091】
吸気弁閉タイミングの遷移は、カウントの終了タイミングt2よりも早いタイミングt1で終了するように、諸元が設定される。すなわち、このタイミングt1を経過した時点では、ステップS12で設定されるEGR量QEGRおよびスロットル開度TVOが、遅閉じモードMLIVCと同様の値に切り換えられる。このため、タイミングt1を経過した時点では、未だ遅角遷移モードMTR-Rではあるが、運転モードの遷移は実際には終了していることになる。
【0092】
次に、図6に示したフローチャートのステップS5において、制御ユニット100に設定されている運転モードMが早閉じモードMEIVCではなかった場合(ステップS5において、NOの場合)の制御例について、図7に示すフローチャートを参照しながら説明する。
【0093】
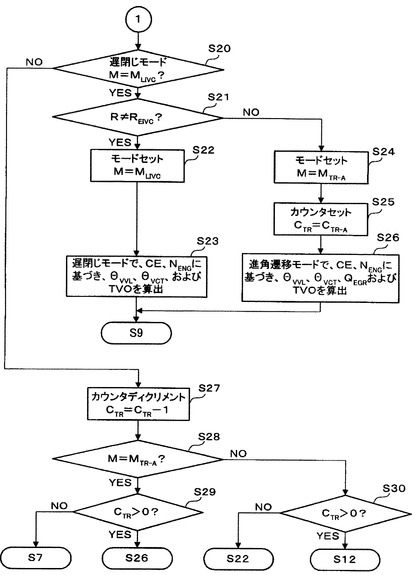
運転モードMが早閉じモードMEIVCではなかった場合、制御ユニット100は、さらに運転モードMが遅閉じモードMLIVCであるか否かを判定する(ステップS20)。仮に運転モードMが遅閉じモードMLIVCである場合、制御ユニット100は、さらに現在の目標空気充填量CEおよびエンジン回転速度NENGに基づき運転領域Rを判定し、現在の運転領域Rが早閉じ運転領域REIVC以外であるか、すなわち要求負荷に基づく吸気弁閉タイミングIVCが第1閉弁タイミング範囲IVC1st以外にあるか否かを判定する(ステップS21)。現在の運転領域Rが早閉じ運転領域REIVC以外である場合、制御ユニット100は、運転モードMを遅閉じモードMLIVCに設定する(ステップS22)。次いで、制御ユニット100は、この遅閉じモードMLIVCでの目標空気充填量CEおよびエンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、スロットル開度TVOを算出し(ステップS23)、この算出したバルブリフト量θVVL、開弁期間θVCTおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FP、EGR量QEGRおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、TVOD、FPD、EGROPENおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する(ステップS9)。その後、ステップS2に移行し、上述した制御を繰り返す。
【0094】
図12は、図7のフローチャートによって設定される遅閉じモードMLIVCでの吸気弁閉タイミングの制御例を示す図であり、図13は、図7のフローチャートによって設定される遅閉じモードMLIVCでのスロットル開度の制御例を示す図である。各図において、(A)は目標空気充填量CEに応じてスロットル開度を並行して制御する場合であり、(B)はスロットル開度を一定に維持する場合である。
【0095】
図12(A)および図13(A)を参照して、第2閉弁タイミング範囲IVC2ndで吸気弁21が閉じる場合において、スロットル開度TVOを変更しながら目標空気充填量CEを制御する場合には、目標空気充填量CEの増減に拘わらず、吸気弁閉タイミングを一定にし、スロットル弁57下流における、吸気ポート18を含む吸気通路内の圧力を制御することで、気筒空気充填量が変化する。
【0096】
他方、図12(B)および図13(B)に示すように、機関速度が一定の条件のもとでスロットル開度TVOを一定に維持し、目標空気充填量CEが増加するに連れて吸気弁閉タイミングを進角させる場合には、吸気弁閉タイミングが第2閉弁タイミングIVC2nd内で進角するに連れて、そのときの最大気筒空気充填量が得られる吸気弁閉タイミングに近づくので、気筒空気充填量が制御される。その際に、スロットル開度TVOは比較的大きな値で一定に維持され、吸気通路内の圧力が高く維持されるので、ポンプ損失が低い状態が維持される。
【0097】
図12(A)および(B)の何れの場合においても、エンジン回転速度NENGが高くなるほど、吸気弁21の閉弁時期は遅角する。また、図13(A)および(B)の何れの場合においても、エンジン回転速度NENGが高くなるほど、スロットル開度TVOは、大きく制御される。これは、エンジン回転速度NENGが高くなるほど、吸気慣性力が増加し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングが遅角することに対応しているのであり、この制御によって、所要の目標空気充填量CEを確保することができるのである。
【0098】
次に、図7を参照して、ステップS21において、現在の要求負荷に基づく吸気弁閉タイミングIVCが第1閉弁タイミング範囲IVC1stにある場合(ステップS21において、NOの場合)、制御ユニット100は、運転モードMを進角遷移モードMTR-Aに設定する(ステップS24)。次いで、制御ユニット100は、所定のカウント時間CTR-Aをカウント値CTRとして設定し(ステップS25)、この進角遷移モードMTR-Aでの目標空気充填量CEおよびエンジン回転速度NENGに基づき、吸気弁21のバルブリフト量θVVL、吸気弁21の開弁期間θVCT、EGR量QEGRおよびスロットル開度TVOを算出する(ステップS26)。
【0099】
ステップS26が実行された後は、ステップS9に移行することにより、進角遷移モードMTR-Aで算出したバルブリフト量θVVL、開弁期間θVCT、EGR量QEGRおよびスロットル開度TVO、並びにステップS3で算出した燃料噴射量FPおよび点火タイミングSAにそれぞれ対応する制御信号θVVL-D、θVCT-D、EGROPEN、TVOD、FPDおよびSADを出力することによって、吸気弁駆動機構30やスロットル弁57の各アクチュエータを制御する。その後、ステップS2に移行し、上述した制御を繰り返す。
【0100】
図14は、図7のフローチャートによる進角遷移モードMTR-Aでの制御例を示すタイミングチャートである。
【0101】
図14に示すように、進角遷移モードMTR-Aでの制御が実行されると、その開始タイミングt0からカウント値CTRがデクリメントされ(図7のステップS27参照)、タイミングt2で終了する。吸気弁駆動機構30は、カウントを開始したタイミングt0から吸気弁閉タイミングを第1閉弁タイミング範囲IVC1stに移動するために、進角を開始する。この進角遷移モードMTR-Aにおいては、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が進角するのに連れて(例えば進角に比例して)低減し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、スロットル開度TVOが、吸気弁21の閉弁時期が進角するのに連れて増大する。これにより、当該気筒11において、吸気弁21がプリイグニション等の異常燃焼が懸念される中間閉弁タイミング範囲IVCIMに入り込んだとしても、スロットル弁57の一時的閉作動による吸気通路内の圧力の低下によって異常燃焼が防止される。
【0102】
また、進角遷移モードMTR-Aにおいて、EGR弁アクチュエータ64がEGR弁63を一時的に開方向に駆動して、EGR弁63の開度(EGR量QEGR)を増大させる。すなわち、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも遅角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が進角するのに連れて(例えば進角に比例して)増大し、当該エンジン回転速度NENGにおいて目標空気充填量CEが最大となる吸気弁閉タイミングよりも進角側で吸気弁21を閉じる場合には、EGR量QEGRが、吸気弁21の閉弁時期が進角するのに連れて低減する。前記EGR弁63の一時的開動作により、筒内残留ガスである内部EGRよりも低温の外部EGRが筒内に導入されるので、より確実に異常燃焼を回避することが可能になる。
【0103】
吸気弁閉タイミングの遷移は、カウントの終了タイミングt2よりも早いタイミングt1で終了するように、諸元が設定される。すなわち、このタイミングt1を経過した時点では、ステップS26で設定されるEGR量QEGRおよびスロットル開度TVOが、早閉じモードMEIVCと同様の値に切り換えられる。このため、タイミングt1を経過した時点では、未だ進角遷移モードMTR-Aではあるが、運転モードの遷移は実際には終了していることになる。
【0104】
次に、図7のフローチャートにおいて、制御ユニット100に設定されている運転モードMが遅閉じモードMLIVCではなかった場合(ステップS20において、NOの場合)、運転モードMは、遅角遷移モードMTR-Rおよび進角遷移モードMTR-Aのうちの何れかである。
【0105】
そこで、本実施形態では、まず、制御ユニット100がカウント値CTRをデクリメントし(ステップS27)、運転モードMが進角遷移モードMTR-Aであるか否かを判定する(ステップS28)。
【0106】
仮に運転モードMが進角遷移モードMTR-Aである場合、制御ユニット100は、カウント値CTRが0よりも大きいか否かを判定する(ステップS29)。仮にカウント値CTRが0よりも大きい場合、制御ユニット100は、ステップS26以降の制御を実行する。これにより、進角遷移モードMTR-Aでの運転制御が継続される。
【0107】
ステップS29において、カウント値CTRが0以下である場合、既に吸気弁駆動機構30による吸気弁21の運転モード切換は完全に終了しているので、ステップS7以降のステップに移行して、運転モードMを早閉じモードMEIVCに切り換え、上述した早閉じモードでの運転制御を繰り返す。
【0108】
ステップS28において、運転モードMが遅角遷移モードMTR-Rである場合、制御ユニット100は、カウント値CTRが0よりも大きいか否かを判定する(ステップS30)。仮にカウント値CTRが0よりも大きい場合、制御ユニット100は、ステップS12以降の制御を実行する。これにより、遅角遷移モードMTR-Rでの運転制御が継続される。他方、ステップS30において、カウント値CTRが0以下である場合、既に吸気弁駆動機構30による吸気弁21の運転モード切換は完全に終了しているので、ステップS22以降のステップに移行して、運転モードMを遅閉じモードMLIVCに切り換え、上述した遅閉じモードでの運転制御を繰り返す。
【0109】
図15は、図6および図7のフローチャートを実行した制御例を示す吸気弁閉タイミングと目標空気充填量CEとの関係のグラフである。図15において、(A)は遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合、(B)は遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合である。
【0110】
図15(A)を参照して、遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を並行して制御する場合、吸気弁21の閉弁時期を最も進角側に固定して目標空気充填量CEを制御することができるので、早閉じモードMEIVCから遅閉じモードMLIVCへ切り換える時の変位量(図4におけるコントロールシャフト120の回動角度)も最小となり、早閉じモードMEIVCからの切り換えに要する時間を可及的に短くすることができる。
【0111】
他方、図15(B)を参照して、遅閉じモードMLIVCでの吸気弁閉タイミングの制御において、スロットル開度を一定に維持する場合、早閉じモードMEIVCから遅閉じモードMLIVCへ切り換える時の変位量(図4におけるコントロールシャフト120の回動角度)は最大となるが、吸気通路内の圧力を高く維持することができるので、ポンプ損失を最小のものとし、高い出力を維持することができる。
【0112】
何れの場合においても、エンジン回転速度NENGが上昇するにつれて、吸気弁閉タイミングが遅角するので、エンジン回転速度NENGが高いほど第1閉弁タイミング範囲IVC1stと第2閉弁タイミング範囲IVC2ndとの間の中間閉弁タイミング範囲IVCIMが小さくなり、ある回転速度(例えば、2500rpm)以上では、専ら第2閉弁タイミング範囲IVC2ndで吸気弁21が閉じることとなり、運転モードMの切り換えは不要となる。
【0113】
本実施形態では、前記制御ユニット100は、トラクションコントロールをも実行するようになされている。なお、トラクションコントロールは、制御ユニット100とは別の制御ユニットにより行うようにしてもよい。
【0114】
具体的には、制御ユニット100には、前記前輪7および後輪8に設けた車輪速度センサ7a,7bからの信号が入力される。これら入力信号に基づき、前輪7(駆動輪)の車輪速度VF(左右前輪の車輪速度の平均値)と、後輪8の車輪速度VR(左右後輪の車輪速度の平均値)とを求める。そして、前輪7の車輪速度VFから後輪8の車輪速度VRを引いた値である前輪7のスリップ量VSLIPが、所定値VSLIP1以上である場合に、トラクションコントロールを作動させる。すなわち、前記スリップ量VSLIPに基づいて、エンジン1のトルク低下量dTQを計算する。このトルク低下量dTQは、スリップ量VSLIPが大きいほど大きくなる。このトルク低下量dTQの分だけエンジン1の要求トルクを低下させる。
【0115】
そして、制御ユニット100は、遅閉じモードMLIVCである場合において、前記トラクションコントロールの作動による要求トルクの低下によって、現在の運転領域Rが早閉じ運転領域REIVCになったとき、つまり、要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときには、要求トルクの低下により機関速度が所定量以上低下する可能性を判定し、この可能性が所定レベルよりも低いと判定したときに、進角遷移モードMTR-Aにして、最終的には早閉じモードMEIVCにする。一方、前記可能性が前記所定レベル以上であると判定したときには、遅閉じモードMLIVCに留まるようにして、進角遷移モードMTR-Aにはしない。本実施形態では、前記所定トルクは、本発明の第1所定トルクに相当するとともに、第1所定トルクに対して同一の機関速度において同じ値に設定された第2所定トルクに相当する。
【0116】
機関速度が所定量以上低下する可能性は、前記要求トルクが、前記所定トルク以上である状態から該所定トルクを超えて低下する際の低下量(前記トルク低下量dTQ)が大きいほど、高いと判定する。トルク低下量dTQは、スリップ量VSLIPが大きいほど大きくなり、スリップ量VSLIPが大きいほど、スリップ量VSLIPと変速機構4の減速比GRとから予測可能な機関速度低下量ΔNENGが大きくなるので、本実施形態では、その予測される機関速度低下量ΔNENGの大きさでもって、前記可能性を判定する。この場合、前記所定レベルは、所定の機関速度低下量ΔNENG1であり、この所定の機関速度低下量ΔNENG1の値は、図16に示すように、前記要求トルクが、前記所定トルク以上である状態から該所定トルクを超えて低下する際の機関速度NENGが高いほど、高く設定する(例えば機関速度NENGに比例して高く設定する)ことが好ましい。従って、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1よりも少ないと判定したときには、進角遷移モードMTR-Aにし、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1以上であるときには、遅閉じモードMLIVCに留まるようにすることになる。
【0117】
ここで、制御ユニット100のトラクションコントロールの処理動作を図17のフローチャートに基づいて説明する。
【0118】
最初のステップS51で、各種信号を読み込み、次のステップS52で、その読み込んだ信号のうちの前記車輪速度センサ7a,7bからの信号に基づいて、前輪7のスリップ量VSLIP(=VF−VR)を求める。
【0119】
次のステップS53では、前記スリップ量VSLIPが所定値VSLIP1以上であるか否かを判定する。このステップS53の判定がNOであるときには、そのままリターンする一方、ステップS53の判定がYESであるときには、ステップS54に進む。
【0120】
ステップS54では、トラクションコントロールを作動させ、次のステップS55で、前輪7のスリップ量VSLIPに基づきトルク低下量dTQを計算する。そして、次のステップS56で、そのトルク低下量dTQの分だけエンジン1の要求トルクを低下させ、しかる後にリターンする。
【0121】
従って、前輪7がスリップして、そのスリップ量が所定値以上であるときには、エンジン1の出力トルクが低下し、これにより、前輪7のグリップ力が回復してスリップ量が減少することになる。前記スリップ量が前記所定値よりも少なくなると、トラクションコントロールの作動は停止する。
【0122】
次に、制御ユニット100の、トラクションコントロール作動による要求トルク低下時の処理動作を図18のフローチャートに基づいて説明する。
【0123】
最初のステップS61で、各種信号を読み込み、次のステップS62で、トラクションコントロールが作動中であるか否かを判定する。このステップS62の判定がNOであるときには、そのままリターンする一方、ステップS62の判定がYESであるときには、ステップS63に進む。
【0124】
ステップS63では、現在の運転領域Rが早閉じ運転領域REIVCであるか否かを判定する。このステップS63の判定がNOであるときには、そのままリターンする一方、ステップS63の判定がYESであるときには、ステップS64に進む。
【0125】
ステップS64では、現在の運転モードMが早閉じモードMEIVCであるか否かを判定する。このステップS64の判定がYESであるときには、そのままリターンする一方、ステップS63の判定がNOであるときには、ステップS65に進む。
【0126】
ステップS65では、前記スリップ量VSLIPと変速機構4の減速比GRとから、機関速度低下量ΔNENGを予測する。
【0127】
次のステップS66では、機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1(図16に示すように、機関速度NENGに対応する値)以上であるか否かを判定する。このステップS66の判定がYESであるとき(機関速度が所定量以上低下する可能性が所定レベル以上であるとき)には、そのままリターンする一方、ステップS66の判定がNOであるとき(機関速度が所定量以上低下する可能性が所定レベルよりも低いとき)には、ステップS67に進む。
【0128】
ステップS67では、現在の運転モードMが進角遷移モードMTR-Aであるか否かを判定する。このステップS67の判定がYESであるときには、そのままリターンする一方、ステップS67の判定がNOであるときには、ステップS68に進む。
【0129】
ステップS68では、現在の運転モードMを進角遷移モードMTR-Aに設定し、しかる後にリターンする。
【0130】
このように、トラクションコントロールの作動によりエンジン1の要求トルクが低下して、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換える際に、その要求トルクの低下により機関速度が所定量以上低下する可能性が判定され、この可能性が所定レベルよりも低い(機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1よりも少ない)と判定されたときには、運転モードを切り換えるべく、進角遷移モードMTR-Aにされ、前記可能性が前記所定レベル以上である(機関速度低下量ΔNENGが所定の機関速度低下量ΔNENG1以上である)と判定されたときには、遅閉じモードMLIVCのままとされる。
【0131】
従って、本実施形態では、進角遷移モードMTR-Aにおいて、スロットルアクチュエータ58がスロットル弁57を一時的に閉方向に駆動して、吸気通路内の圧力を低下させるので、空気充填量が過剰にならず、異常燃焼を防止することができる(遅角遷移モードMTR-Rにおいても同様)。
【0132】
ここで、トラクションコントロールの作動によりエンジン1の要求トルクが低下して、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換える際に、機関速度が所定量以上低下する可能性を判定しないで運転モードを切り換えた場合、その切換え中に(進角遷移モードMTR-Aにおいて)、前輪7のグリップ力の回復によりスリップ量が急激に減少して機関速度が急低下する可能性があり、このように機関速度が低下すると、スロットル弁57による吸気絞り効果が低下するため、吸気圧が充分に低下しなくなる可能性がある。このため、進角遷移モードMTR-Aにおいては、気筒空気充填量の過剰による異常燃焼の発生を確実に防止するべく、スロットル弁57をより絞り気味にして、その絞り気味のスロットル開度を前提にして、制御パラメータを設定する必要が生じ、この結果、ポンプ損失が増大して、エンジン1の運転効率を低下させる可能性がある。
【0133】
しかし、本実施形態では、機関速度が所定量(前記吸気絞り効果に影響を及ぼすような量)以上低下する可能性を判定し、その可能性が所定レベルよりも低いと判定したときにのみ、運転モードを遅閉じモードMLIVCから早閉じモードMEIVCへ切り換えるので、スロットル弁57の一時的閉作動制御中に機関速度が所定量以上低下する可能性は低くなり、スロットル弁57による吸気絞り効果の低下により気筒空気充填量が過剰になる虞れを排除することができる。従って、進角遷移モードMTR-Aにおいて、開き気味のスロットル弁開度(遅角遷移モードMTR-Rで絞るときと略同じスロットル弁開度)を前提として、制御パラメータ(スロットル弁開度や吸気弁閉タイミング等)の設定を行なうことが可能となる。よって、ポンプ損失を低減することができて、エンジン1の運転効率を高く保つことが可能となる。
【0134】
なお、前記実施形態では、エンジン1の要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定するようにしたが、エンジン1の要求トルクが、前記所定トルク(これを第1所定トルクとする)以上である状態から、同一の機関速度で第1所定トルクよりも小さく設定された第2所定トルク(図8において特性線L2の下側に設定される、例えば特性線L2と平行な特性線)を超えて低下するときに、機関速度が所定量以上低下する可能性がより高くなるので、このときに該可能性を判定するようにしてもよい。この場合、エンジン1の要求トルクが第1所定トルク以下になっても第2所定トルクを超えて低下しないときには、機関速度が所定量以上低下する可能性を判定しないで運転モードが切り換えられることになる。
【0135】
ここで、エンジン1の要求トルクが、前記所定トルク以上である状態から、該所定トルクを超えて低下するときに、機関速度が所定量以上低下する現象が生じ得るのは、トラクションコントロールの作動時には限られない。例えば、マニュアル変速機の場合に、シフトアップ操作がなされたときに、そのシフトアップ操作により機関速度が所定量以上低下する可能性がある。従って、機関速度が所定量以上低下する可能性の判定は、トラクションコントロールの作動によりエンジン1の要求トルクが低下したときに限らず、機関速度が所定量以上低下する現象が生じ得るあらゆる場合に行うのがよい。
【産業上の利用可能性】
【0136】
本発明は、内燃機関、スロットル弁および吸気閉弁時期可変機構を備えた内燃機関システムの制御方法およびその内燃機関システムに有用であり、特に、吸気弁の閉弁時期を遅閉じ範囲から早閉じ範囲へ移行するときに、スロットル弁を一時的に絞る場合に有用である。
【符号の説明】
【0137】
1 エンジン(火花点火式内燃機関)
11 気筒
14 クランクシャフト
15 ピストン
17 燃焼室
18 吸気ポート(吸気通路)
21 吸気弁
30 吸気弁駆動機構(吸気閉弁時期可変機構)
55b 吸気マニホールドの吸気経路(吸気通路)
57 スロットル弁
58 スロットルアクチュエータ
100 制御ユニット(制御器)
【特許請求の範囲】
【請求項1】
往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、を備えた内燃機関システムの制御方法であって、
前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁を閉じる工程と、
前記要求トルクが、前記第1所定トルクよりも小さいときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁を閉じる工程と、
前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定する工程と、
前記可能性が所定レベルよりも低いと判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行するように前記吸気閉弁時期可変機構を制御するとともに、前記スロットル弁を一時的に閉方向に駆動する工程と、
前記可能性が前記所定レベル以上であると判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御する工程と、を備えていることを特徴とする内燃機関システムの制御方法。
【請求項2】
請求項1記載の内燃機関システムの制御方法において、
前記可能性を判定する工程は、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の低下量が大きいほど、前記可能性が高いと判定する工程であることを特徴とする内燃機関システムの制御方法。
【請求項3】
請求項1又は2記載の内燃機関システムの制御方法において、
前記所定レベルは、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の機関速度が高いほど、高く設定されていることを特徴とする内燃機関システムの制御方法。
【請求項4】
請求項1〜3のいずれか1つに記載の内燃機関システムの制御方法において、
前記内燃機関からの動力が伝達される車輪のスリップ量が所定値以上である際に、該内燃機関の要求トルクを低下させる工程を更に備えていることを特徴とする内燃機関システムの制御方法。
【請求項5】
往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記スロットル弁を駆動するスロットルアクチュエータと、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、前記スロットルアクチュエータおよび前記吸気閉弁時期可変機構を制御する制御器と、を備えた内燃機関システムであって、
前記制御器は、
前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、
前記要求トルクが、前記第1所定トルクよりも小さいときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、
前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、且つ、
前記可能性が所定レベルよりも低いと判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行し且つ前記スロットル弁が一時的に閉方向に作動するように前記吸気閉弁時期可変機構および前記スロットルアクチュエータを制御し、且つ、
前記可能性が前記所定レベル以上であると判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御するものである、
ことを特徴とする内燃機関システム。
【請求項1】
往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、を備えた内燃機関システムの制御方法であって、
前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁を閉じる工程と、
前記要求トルクが、前記第1所定トルクよりも小さいときに、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁を閉じる工程と、
前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定する工程と、
前記可能性が所定レベルよりも低いと判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行するように前記吸気閉弁時期可変機構を制御するとともに、前記スロットル弁を一時的に閉方向に駆動する工程と、
前記可能性が前記所定レベル以上であると判定したときに、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御する工程と、を備えていることを特徴とする内燃機関システムの制御方法。
【請求項2】
請求項1記載の内燃機関システムの制御方法において、
前記可能性を判定する工程は、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の低下量が大きいほど、前記可能性が高いと判定する工程であることを特徴とする内燃機関システムの制御方法。
【請求項3】
請求項1又は2記載の内燃機関システムの制御方法において、
前記所定レベルは、前記要求トルクが、前記第1所定トルク以上である状態から前記第2所定トルクを超えて低下する際の機関速度が高いほど、高く設定されていることを特徴とする内燃機関システムの制御方法。
【請求項4】
請求項1〜3のいずれか1つに記載の内燃機関システムの制御方法において、
前記内燃機関からの動力が伝達される車輪のスリップ量が所定値以上である際に、該内燃機関の要求トルクを低下させる工程を更に備えていることを特徴とする内燃機関システムの制御方法。
【請求項5】
往復動するピストンと共に燃焼室を規定する気筒、前記燃焼室内へ導入される空気が通過する吸気通路、および、該吸気通路を燃焼室から遮断可能で且つクランクシャフトにより駆動される吸気弁、を有する内燃機関と、前記吸気通路に配設されたスロットル弁と、前記スロットル弁を駆動するスロットルアクチュエータと、前記クランクシャフトにより駆動される前記吸気弁の閉弁時期を制御する吸気閉弁時期可変機構と、前記スロットルアクチュエータおよび前記吸気閉弁時期可変機構を制御する制御器と、を備えた内燃機関システムであって、
前記制御器は、
前記内燃機関の要求トルクが、機関速度毎に定まる第1所定トルク以上であるときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも遅角側に設定される遅閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、
前記要求トルクが、前記第1所定トルクよりも小さいときには、各気筒サイクルにおいて、当該機関速度において空気充填量が最大となる時期よりも進角側に設定され且つ前記遅閉じ範囲から離間した早閉じ範囲内で前記吸気弁が閉じるように前記吸気閉弁時期可変機構を制御し、且つ、
前記要求トルクが、前記第1所定トルク以上である状態から、該第1所定トルク以下に設定された第2所定トルクを超えて低下するときに、機関速度が所定量以上低下する可能性を判定し、且つ、
前記可能性が所定レベルよりも低いと判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲から前記早閉じ範囲へ移行し且つ前記スロットル弁が一時的に閉方向に作動するように前記吸気閉弁時期可変機構および前記スロットルアクチュエータを制御し、且つ、
前記可能性が前記所定レベル以上であると判定したときには、前記吸気弁の閉弁時期が前記遅閉じ範囲に留まるように前記吸気閉弁時期可変機構を制御するものである、
ことを特徴とする内燃機関システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−43076(P2011−43076A)
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願番号】特願2009−190011(P2009−190011)
【出願日】平成21年8月19日(2009.8.19)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願日】平成21年8月19日(2009.8.19)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]