
内視鏡システム
【課題】内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供する。
【解決手段】軸部材2と、回動部材3とを有する治具1と、少なくとも治具1を観察する内視鏡50と、を具備し、軸部材2は、凹部に回動部材3が嵌入後、凹部の深さが回動部材3の肉厚以上のときパイプ部材10の頂面に接触するとともに凹部の深さが回動部材3の肉厚よりも小さいときパイプ部材10の頂面に非接触となり、内視鏡50は、凹部に回動部材3が嵌入後、少なくともパイプ部材10の頂面への軸部材2の接触の有無を観察することを特徴とする。
【解決手段】軸部材2と、回動部材3とを有する治具1と、少なくとも治具1を観察する内視鏡50と、を具備し、軸部材2は、凹部に回動部材3が嵌入後、凹部の深さが回動部材3の肉厚以上のときパイプ部材10の頂面に接触するとともに凹部の深さが回動部材3の肉厚よりも小さいときパイプ部材10の頂面に非接触となり、内視鏡50は、凹部に回動部材3が嵌入後、少なくともパイプ部材10の頂面への軸部材2の接触の有無を観察することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象物の段差の深さを測定する治具と、内視鏡とを具備する内視鏡システムに関する。
【背景技術】
【0002】
従来、治具と内視鏡とを具備する内視鏡システムを用いて、遠隔操作にて測定対象物の段差の深さや、段差の間隔を測定する構成が周知である。
【0003】
例えば、特許文献1には、治具となるフレキシブルアームの先端にギャップ測定センサを設け、内視鏡の観察視野内において、ギャップ測定センサを測定対象物の段差の底面に垂直に突き当てることによって段差の高さを計測することにより、遠隔操作にて段差の深さを測定する内視鏡システムの構成が開示されている。
【0004】
また、特許文献2には、計測治具となるアームの先端側に、バネ状の歪みゲージ式ギャップセンサを設け、該ギャップセンサを、内視鏡の観察視野内における測定対象物間に挿入することにより、センサの歪みから遠隔操作にて測定対象物間の間隔を測定する内視鏡システムの構成が開示されている。
【0005】
さらに、特許文献3には、カメラを用いた観察視野内において、計測治具となるレーザ光発生装置から測定対象物に対してレーザ光を照射し、カメラによって撮像された観察画像に表示されたレーザ光の形状を判断して、遠隔操作にて測定対象物間の間隔を測定するシステムの構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−239040号公報
【特許文献2】特開平4−104004号公報
【特許文献3】特開平5−34490号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に開示された構成においては、測定対象物の段差の底面に対するギャップ測定センサの突き当て方向が、垂直方向に限定されてしまうため、段差が複雑な形状を有する測定対象物内における入り込んだ場所に位置している場合には、遠隔操作にて、段差の底面に対してギャップ測定センサを垂直に突き当てることができない、または突き当て難いといった問題があった。尚、この問題は、仮に、特許文献2に開示されたギャップセンサを用いて段差の深さを測定する場合であっても同様である。
【0008】
また、特許文献3に開示された構成を、段差の深さを測定するのに適用した場合であっても、段差が複雑な形状を有する測定対象物内に位置している場合には、段差に対してレーザ光が照射し難いため、段差の深さを測定し難いといった問題があった。
【0009】
さらに、特許文献1〜3の構成では、段差の深さを測定する構成が複雑であり、段差の深さの正確な値を必要とせず、段差の深さが設定深さに形成されているか否かを確認するだけの作業を行う場合には、より簡単に段差の深さを測定できる構成が望まれていた。
【0010】
本発明は、上記問題点及び事情に鑑みてなされたものであり、内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明の一態様における内視鏡システムは、測定対象物の基準面に少なくとも一部が接触自在な軸部材と、前記測定対象物の前記基準面に対して凹んで形成された段差に嵌入自在であるとともに、前記段差における前記基準面よりも設定深さ凹んで位置する底面に接触自在な、前記軸部材から前記設定深さと同じ高さ突出する凸部とを有する治具と、少なくとも前記治具を観察する内視鏡と、を具備し、前記軸部材は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さ以上のとき前記基準面に接触するとともに前記段差の深さが前記凸部の高さよりも小さいとき前記基準面に非接触となり、前記内視鏡は、前記段差に前記凸部が嵌入後、少なくとも前記基準面への前記軸部材の接触の有無を観察する。
【発明の効果】
【0012】
本発明によれば、内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施の形態の内視鏡システムを、パイプ部材及び保持部材とともに示す部分斜視図
【図2】図1中のII-II線に沿う治具及び凹部の断面図
【図3】図1中の治具の挿入方向の先端側を示す斜視図
【図4】図1の治具における軸部材の延在方向の一端に、牽引部材が接続されている状態を概略的に示す部分斜視図
【図5】図4の牽引部材が牽引されて軸部材の延在方向を可変した状態を概略的に示す部分斜視図
【図6】図1の治具の軸部材の延在方向の一端及び他端に、それぞれ径が異なる複数の部材が着脱自在な構成を、内視鏡の挿入部とともに示す部分斜視図
【図7】図6の軸部材に径が異なる部材が装着された後の軸部材及び回動部材、凹部の断面図
【図8】図1の治具における軸部材が、延在方向に伸縮自在な構成を概略的に示す部分斜視図
【図9】2つの回動部材に設けられた観察レンズを用いて、凹部の深さ及び傾きを検出する内視鏡システムの構成を示す部分斜視図
【図10】2つの回動部材に設けられたレーザ光照射部を用いて、凹部の深さを測定する内視鏡システムの構成を示す部分斜視図
【図11】図10の回動部材を、図10中のXI方向からみた側面図
【図12】治具の凸部を半球状の部材から構成した変形例を示す部分斜視図
【図13】パイプ部材の先端開口から先端が折り曲げられたU字状の板材を挿入方向の前方に突出させた状態を示す部分斜視図
【図14】図13中のXIV-XIV線に沿う治具の断面を、パイプ部材とともに示す図
【図15】図13の板材を、開閉自在な2本の板材から構成した変形例を、板材の開成状態と閉成状態とで示す図
【図16】第2実施の形態の内視鏡システムの治具を部分的に示す斜視図
【図17】第3実施の形態の内視鏡システムにおける治具の部分分解斜視図
【図18】凹部に治具の凸部が嵌入後、軸部材から凸部が分離した状態を示す断面図
【図19】凹部に治具の凸部が嵌入後、軸部材に凸部が接触したままの状態を示す断面図
【図20】内視鏡の挿入部の外周側面に、治具を設けた変形例を示す図
【図21】内視鏡の挿入部及び治具が挿通されるガイド部材を、ガイド部材から治具を取り出した状態で、保持部材及びパイプ部材とともに示す部分斜視図
【図22】図21の治具の軸部材を90°回転させた状態を示す図
【図23】図20のガイド部材の構成の変形例を、パイプ部材及び保持部材とともに示す部分斜視図
【図24】図23中のIIXIV-IIXIV線に沿う治具及び凹部の断面図
【図25】ガイド部材に設けられたカメラを用いて、保持部材の指標を観察するガイド部材の変形例を示す斜視図
【図26】ガイド部材から照射するレーザ光を用いて、凹部の深さを測定するガイド部材の変形例の構成を、内視鏡、保持部材及びパイプ部材とともに示す部分斜視図
【図27】図26中のIIXVII-IIXVII線に沿う、ガイド部材及び凹部の断面図
【図28】図26のパイプ部材及び保持部材に照射されたレーザを、図26中のIIXVII方向からみた部分斜視図
【図29】歪ゲージを用いて凹部の深さを計測する内視鏡システムの変形例の構成を示す斜視図
【図30】曲がった芯金により、軸部材の延在方向が可変された状態を示す部分斜視図
【図31】図29の軸部材の凸部が凹部に嵌入された状態の断面図
【図32】図1の治具の軸部材の変形例を示す図
【図33】図32のフランジ部を凹部に嵌入させた状態を示す断面図
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施の形態を説明する。尚、以下に示す実施の形態においては、測定対象物は、パイプ部材10を例に挙げ、段差は、2本のパイプ部材10と保持部材11とにより形成された凹部Dを例に挙げて示す。
【0015】
(第1実施の形態)
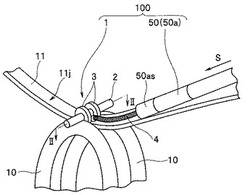
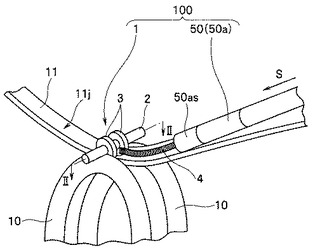
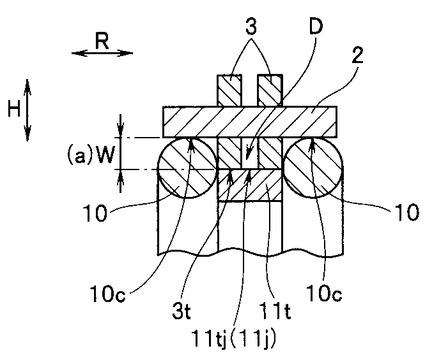
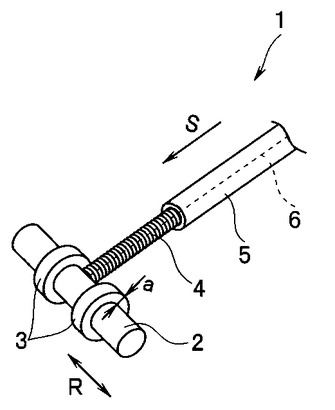
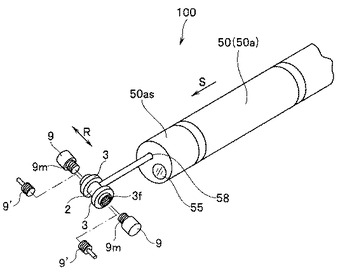
図1は、本実施の形態の内視鏡システムを、パイプ部材及び保持部材とともに示す部分斜視図、図2は、図1中のII-II線に沿う治具及び凹部の断面図、図3は、図1中の治具の挿入方向の先端側を示す斜視図である。
【0016】
図1に示すように、内視鏡システム100は、治具1と、少なくとも治具1を観察する内視鏡50とにより主要部が構成されている。
【0017】
図1〜図3に示すように、治具1は、軸部材2と、凸部である回動部材3と、バネ部材4と、パイプ5と、ワイヤ6とを具備して主要部が構成されている。
【0018】
治具1は、バネ部材4、パイプ5、ワイヤ6が、内視鏡50の挿入部50a内に設けられた後述するチャンネル58(図6参照)に対し、挿入部50aの先端部50asの先端面に設けられたチャンネル58の開口を介して挿入方向Sの前方から挿通自在となっているとともに、挿通後、少なくとも軸部材2と回動部材3とが、チャンネル58の開口から挿入方向Sの前方(以下、単に前方を称す)に突出して位置する。
【0019】
尚、図1は、軸部材2及び回動部材3に加え、バネ部材4もチャンネル58の開口から前方に突出した状態を示している。
【0020】
軸部材2は、円柱状または円筒状の部材から方向Rに沿って細長に形成されており、図1、図2に示すように、2本のパイプ部材10の基準面となる頂面10cに、少なくとも一部が接触自在となっている。尚、軸部材2の形状は、円柱状または円筒状に限定されない。
【0021】
回動部材3は、高さ方向Hに肉厚aを有して軸部材2の方向Rにおける略中央部の外周に対して回動自在な部材であり、例えばベアリングから構成されている。即ち、回動部材3は、軸部材2の外周から高さ方向Hに高さaだけ突出している。尚、肉厚aは、後述する凹部Dの設定深さWに一致する大きさに設定されている。
【0022】
また、図1〜図3においては、回動部材3は方向Rにおいて設定間隔を有して2つ設けられているが1つであっても構わない。また、2つの回動部材3の方向Rにおける間隔は、2本のパイプ部材10の方向Rにおける間隔、即ち凹部Dの間隔よりも狭く設定されている。
【0023】
回動部材3は、2本のパイプ部材10の頂面10cに対して凹んで形成された凹部Dに対して嵌入自在であり、頂部を構成する外周面3tが、凹部Dの底面11tjに接触自在となっている。
【0024】
凹部Dは、2本のパイプ部材10と、方向Rにおいて2本のパイプ部材10間に頂面10cよりも底部11tが高さ方向Hにおいて低く位置する曲面形状を有する板状の保持部材11とにより構成されている。
【0025】
また、保持部材11の底部11tの上面11tjは、頂面10cよりも設定深さWだけ凹んで位置している。即ち、底部11tの上面11tjは、凹部Dの底面を構成している。
【0026】
尚、図2においては、設定深さW=回動部材3の肉厚aの場合において、回動部材3の外周面3tが凹部Dの底面11tjに接触し、軸部材2がパイプ部材10の頂面10cに接触する図を示している。
【0027】
バネ部材4は、挿入方向Sに沿って細長なコイル状部材から構成されており、一端である挿入方向Sの先端(以下、単に先端と称す)が、例えば軸部材2の回動部材3間に接続されている。
【0028】
尚、バネ部材4の他端である挿入方向Sの基端(以下、単に基端と称す)には、パイプ5の先端が固定されている。
【0029】
パイプ5の基端は、内視鏡50の操作部に設けられたチャンネル58の入口から内視鏡50外に露出して位置している。
【0030】
尚、パイプ5は必ずしも必要ではなく、凹部Dが複雑に入り込んだ場所に形成されている場合には、凹部Dへの回動部材3の嵌入性を向上させるため、パイプ5の代わりにバネ部材4が、該バネ部材4の基端がチャンネル58の入口から内視鏡50外に露出する長さに形成されていても良い。
【0031】
また、バネ部材4及びパイプ5内には、ワイヤ6若しくはロッド(ファイバロッドのように曲げ可能)が挿通されている。ワイヤ6の先端は軸部材2に固定されており、基端はチャンネル58の入口から内視鏡50外に露出して位置している。
【0032】
尚、ワイヤ6は、バネ部材4及びパイプ5に対して相対的に挿入方向Sの前後に移動自在となっている。
【0033】
バネ部材4は、湾曲自在なことにより、凹部Dへ不特定の方向から遠隔操作にて回動部材3を嵌入させやすくするものである。
【0034】
パイプ5及びワイヤ6は、基端側から前方に押し込まれることにより、凹部Dに回動部材3が嵌入するよう、回動部材3及び軸部材2を移動させるものである。よって、上述したように、パイプ5の代わりにバネ部材4が、該バネ部材4の基端がチャンネル58の入口から内視鏡50外に露出する長さに形成されている場合には、バネ部材4が、基端側からワイヤ6とともに前方に押し込まれることにより、凹部Dに回動部材3が嵌入するよう、回動部材3及び軸部材2を移動させる部材を構成する。
【0035】
尚、ワイヤ6は、パイプ5の基端の位置を固定した状態で基端側から前方に押し込まれることにより、バネ部材4を挿入方向Sに伸張させて、バネ部材4の挿入方向Sにおける長さを可変する機能を有している。これにより、位置を長手方向に微調整しようとしたときに有効となる。
【0036】
内視鏡50は、挿入部50aの先端部50asの先端面に設けられた対物レンズ55(図6参照)を用いて、少なくとも2つのパイプ部材10の頂面10cに対する軸部材2の接触の有無を観察するものである。
【0037】
次に、本実施の形態の作用について説明する。
先ず、凹部Dの深さが設定深さWか否かを測定する場合には、ユーザは、パイプ5及びワイヤ6の基端側を押し込むことにより、内視鏡50のチャンネル58の先端開口から前方に突出させた治具1の回動部材3の外周面3tを、内視鏡50の観察視野内において、遠隔操作にて保持部材11の上面11jに接触させた状態で移動させ、その後、凹部D内に挿入させる。尚、回動部材3の凹部Dへの嵌入は、治具1を移動させずに、内視鏡50の挿入部50aの基端側を前方に押し込むことによって行っても構わない。
【0038】
この際、チャンネル58の先端開口から前方に突出しているバネ部材4が湾曲自在なことにより、治具1の先端側を湾曲させることができることから、凹部Dが入り込んだ場所に位置していたとしても、遠隔操作にて不特定の方向から回動部材3を凹部D内に嵌入させることが容易となる。
【0039】
凹部D内への回動部材3の嵌入後、凹部Dの深さが、回動部材3の肉厚a以上のときは、軸部材2は頂面10cに接触する。一方、凹部Dの深さが肉厚aよりも大きい場合には、底面11tjに対して回動部材3の外周面3tは非接触となる。
【0040】
この頂面10cへの軸部材2の接触を、内視鏡50の対物レンズ55によって観察することにより、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さW以上である、即ち、パイプ部材10の振動を抑制するために保持部材11の底部11tが問題の無い深さに固定されていることを容易に内視鏡によって視認することができる。
【0041】
尚、ユーザは、軸部材2が頂面10cへ接触した際、バネ部材4、パイプ5及びワイヤ6を介して、パイプ5及びワイヤ6の基端側を把持するユーザに伝達される振動からも、頂面10cへの軸部材2の接触を感覚的に認識でき、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さW以上であることを容易に内視鏡によって認識することができる。
【0042】
他方、凹部Dの深さが回動部材3の肉厚aよりも小さいときは、軸部材2は、頂面10cに非接触となる。尚、凹部Dの深さが、肉厚a以下のときは、底面11tjに外周面3tが接触する。
【0043】
この頂面10cへの軸部材2の非接触を、内視鏡50の対物レンズ55によって観察することにより、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも小さいことを容易に視認することができる。
【0044】
本実施の形態においては、凹部Dへの回動部材3の嵌入後、パイプ部材10の頂面10cに対する軸部材2の接触の有無を内視鏡50によって観察することにより、凹部Dの深さが設定深さWかどうかを認識できる。
【0045】
このことによれば、ユーザは、内視鏡50を用いて頂面10cに対して軸部材2の接触の有無を観察することができる。
【0046】
また、本実施の形態においては、軸部材2と該軸部材2を移動させるパイプ5との間に、バネ部材4が設けられていると示した。
【0047】
このことによれば、バネ部材4は、湾曲自在なことから凹部Dが入り込んだ場所に位置していたとしても、不特定の方向から回動部材3を、遠隔操作にて凹部D内に嵌入させることが容易となる。
【0048】
以上から、内視鏡50の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具1を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システム100を提供することができる。
【0049】
尚、以下、変形例を示す。本実施の形態においては、パイプ部材10の頂面10cに対する軸部材2の接触の有無を内視鏡50によって観察することにより、凹部Dの深さが設定深さW以上に設定されているか否かをユーザに認識させると示した。
【0050】
これに限らず、保持部材11の底部11tの底面11tjに対する回動部材3の外周面3tの接触の有無により、凹部Dの深さが設定深さWよりも大きく設定されているか否かをユーザに認識させても構わない。
【0051】
具体的には、凹部D内への回動部材3の嵌入後、凹部Dの深さが、回動部材3の肉厚aよりも大きいときは、保持部材11の上面11jに接触していた回動部材3の外周面3tは、保持部材11に非接触となる。即ち、凹部Dの底面11tjに、回動部材3の外周面3tは非接触となる。
【0052】
この底面11tjに回動部材3の外周面3tが非接触な状態を、内視鏡50の対物レンズ55によって観察することによっても、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも大きいことを容易に内視鏡によって視認することができる。
【0053】
尚、保持部材11の上面11jに接触していた回動部材3の外周面3tが、凹部Dに嵌入後、底面11tjに非接触になることにより、バネ部材4、パイプ5及びワイヤ6を介して、パイプ5及びワイヤ6の基端側を把持することで、伝達される保持部材11の上面11jに回動部材3の外周面3tが接触され、底面11tjへの回動部材3の外周面3tの非接触を感覚的に認識でき、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも大きいことを容易に認識することができる。
【0054】
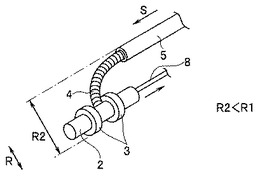
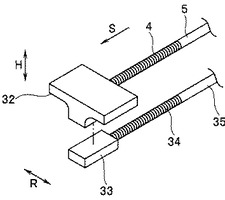
尚、以下、変形例を、図4、図5を用いて示す。図4は、図1の治具における軸部材の延在方向の一端に、牽引部材が接続されている状態を概略的に示す部分斜視図、図5は、図4の牽引部材が牽引されて軸部材の延在方向を可変した状態を概略的に示す部分斜視図である。
【0055】
図4に示すように、軸部材2の方向Rにおける一端に、牽引部材であるワイヤ8の一端が接続されていても良い。尚、ワイヤ8は、軸部材2の方向Rにおける他端に接続されていても構わない。
【0056】
このような構成によれば、ワイヤ8を後方に牽引すると、図4に示すように、方向Rに沿って延在していた軸部材2は、図5に示すように、バネ部材4の湾曲に伴い挿入方向Sに沿って延在する。
【0057】
このことから、方向Rにおける軸部材2の長さは、牽引後小さくなることから(R2<R1)、方向Rにおける狭い間隔を有する空間に、軸部材2及び回動部材3を進入させやすくなる。
【0058】
さらには、ワイヤ8の牽引量に応じて、軸部材2の延在方向を、0°〜90°の間において自由に可変することができることから、複雑な形状を有する測定対象物間に、軸部材及び回動部材3を、不特定の方向から進入させやすくなる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0059】
また、以下、別の変形例を、図6、図7を用いて示す。図6は、図1の治具の軸部材の延在方向の一端及び他端に、それぞれ径が異なる複数の部材が着脱自在な構成を、内視鏡の挿入部とともに示す部分斜視図、図7は、図6の軸部材に径が異なる部材が装着された後の軸部材及び回動部材、凹部の断面図である。
【0060】
図6に示すように、軸部材2の方向Rにおける一端及び他端に、雌ねじ部3fが形成されており、該雌ねじ部3fに、径bの異なる複数の部材9、9’の雄ねじ部9mが螺合自在なことにより、軸部材2の方向Rの一端及び他端に、径bの異なる複数の部材9、9’が着脱自在であっても構わない。
これは、測定する凹部Dの深さに応じて交換してさまざまな寸法に対応するものである。
【0061】
尚、軸部材2の一端及び他端に装着される部材9、9’は、それぞれ同じ径のものが用いられる。また、図7(a)に示すように、部材9は、凹部Dに回動部材3が嵌入し、凹部Dの深さが図2の場合に比べて浅いW’の設定のとき、軸部材2よりも太い部材9を装着してパイプ部材10の頂面10c若しくは保持部材11の底部11tjに接触する状態で、設定値のW’より大きい、小さいを判断するものである。さらに、図7(b)に示すように、軸部材2よりも細い部材9’を装着するときは、設定値は、Wより深いW’’の場合である。
【0062】
このような構成によれば、軸部材2の方向Rの一端及び他端に装着される部材9の径bを変えるのみで、保持部材11の底部11tの底面11tjに対する回動部材3の外周面3tの接触高さを可変することができることから、径bの異なる部材9を変更するのみで、容易に、異なる大きさの設定深さWを測定することができる。具体的には、頂面10c
と底面11tjの深さが、設定深さW1、W2、W3、W4・・・以上か否かを、設定深さに応じて選択した径bの異なる部材9を変更するのみで容易に測定することができる。
【0063】
尚、当然、回動部材3の肉厚aを可変することにより、異なる大きさの設定深さWを測定しても良い。その他の効果は、上述した第1実施の形態と同じである。
【0064】
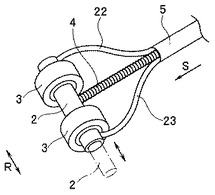
尚、以下、別の変形例を、図8を用いて示す。図8は、図1の治具における軸部材が、延在方向に伸縮自在な構成を概略的に示す部分斜視図である。
【0065】
図8に示すように、軸部材2が方向Rに伸縮自在な構成であっても構わない。具体的には、軸部材2の方向Rの一端と他端とにエア供給チューブ22、23を接続し、エア供給チューブ22から軸部材2にエアを供給すると、軸部材2が方向Rに伸張し、エア供給チューブ23から軸部材2にエアを供給すると、軸部材2が方向Rに収縮する構成であっても構わない。
【0066】
このような構成によれば、方向Rにおける軸部材2の長さを可変することができることから、方向Rにおける狭い空間に対しても、軸部材2を進入させやすくなる他、方向Rにおいて大きな間隔を有するパイプ部材10の頂面10cにも、確実に軸部材2を接触させることが可能となる。その他の効果は、上述した第1実施の形態と同じである。
【0067】
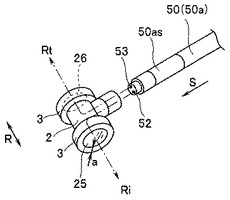
尚、以下、別の変形例を、図9を用いて示す。図9は、2つの回動部材に設けられた観察レンズを用いて、凹部の深さ及び傾きを検出する内視鏡システムの構成を示す部分斜視図である。
【0068】
上述した本実施の形態においては、凹部Dに回動部材3が嵌入された際、頂面10cに対する軸部材2の接触の有無を観察することにより、凹部Dの深さが設定深さW以上か否かを測定すると示した。
【0069】
これに限らず、治具に設けた2つの観察レンズによって、凹部Dの深さを測定する構成であっても構わない。
【0070】
具体的には、図9に示すように、挿入部50aの先端部50asの先端面に対物レンズ52、53を有する内視鏡50の先端部50asの先端面に着脱自在な治具において、軸部材2の方向Rにおける一端及び他端に回動部材3がそれぞれ設けられているとともに、各回動部材3の方向Sに沿った側面の開口に、方向RにおけるRi方向を観察する観察レンズ25、方向RにおけるRi方向とは反対のRt方向を観察する観察レンズ26が設けられている。
【0071】
対物レンズ52は、先端面に治具が装着され、凹部Dに回動部材3が嵌入された後、観察レンズ25を介して、凹部D内のRi方向の像を観察する。
【0072】
対物レンズ53は、先端面に治具が装着され、凹部Dに回動部材3が嵌入された後、観察レンズ26を介して、凹部D内のRt方向の像を観察する。
【0073】
よって、対物レンズ52、53によって観察される2つの画像は、凹部Dの深さに応じて2つのパイプ部材10の頂面10cが予め設定された画像として、不図示の表示部に表示される。ユーザは、表示部に表示された2つの画像から、頂面10cの位置により、凹部Dの深さが設定深さW以上か否かを容易に内視鏡によって視認することができる。また、表示部に表示される2つの画像において、頂面10cの位置が決まった位置より下方に表示される場合や、凹部の壁面しか表示されない場合、ユーザは、凹部Dの深さが設定深さW以上であることを容易に内視鏡によって視認することができる。
【0074】
さらには、ユーザは、2つの画像から、各画像の2つの頂面10cの位置が、ずれているか否かを確認することによって、底面11tjが傾いているか否かを容易に視認することができる。
また、2つの画像を同じ位置に合わせて比較して差があるときは、底面が傾いているので正確な検査が行われていないと判断することができる。
なお、上述したように、一画面に2つの画像を表示するようにしなくとも、画像処理を用いて双方の画像の傾き具合を比較演算するようにして、傾き或いは正確な検査が行われていないであろうと判断したときに警告表示するようにしてもよい。
【0075】
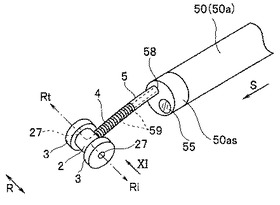
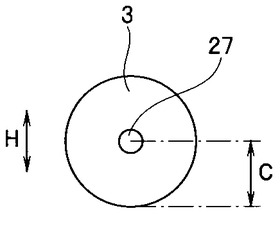
尚、以下、別の変形例を、図10、図11を用いて示す。図10は、2つの回動部材に設けられたレーザ光照射部を用いて、凹部の深さを測定する内視鏡システムの構成を示す部分斜視図、図11は、図10の回動部材を、図10中のXI方向からみた側面図である。
【0076】
上述した本実施の形態においては、凹部Dに回動部材3が嵌入された際、頂面10cに対する軸部材2の接触の有無を観察することにより、凹部Dの深さが、設定深さW以上か否かを測定すると示した。
【0077】
これに限らず、治具に設けた2つのレーザ光照射部によって、凹部Dの深さを測定する構成であっても構わない。
【0078】
具体的には、図10に示すように、軸部材2の方向Rにおける一端及び他端に、回動部材3がそれぞれ設けられており、各回動部材3の挿入方向Sに沿った側面の中央に、レーザ光照射部27がそれぞれ設けられている。尚、図11に示すように、レーザ光照射部27は、回動部材3の外周縁からcの距離に位置している。また、距離cは、設定深さWに一致している。
【0079】
また、軸部材2、バネ部材4、パイプ5内には、レーザ光照射部27に、可視可能なレーザ光を供給する供給ファイバ59が挿通されている。レーザ光照射部27は、方向RにおけるRi方向とRi方向とは反対のRt方向に、レーザ光を供給する。
【0080】
このような構成によれば、凹部D内に回動部材3を嵌入させ、レーザ光照射部27からレーザ光が照射された際、一方、凹部Dの深さが距離cよりも大きければ、レーザ光は、パイプ部材10の側面に照射されることから、パイプ部材10に照射されるレーザ光を内視鏡50の対物レンズ55によって観察することにより、凹部Dの深さが設定深さWよりも大きいことをユーザは容易に視認することができる。
【0081】
他方、凹部Dの深さが距離cよりも小さければ、レーザ光はパイプ部材10には照射されないことから、このことを内視鏡50の対物レンズ55によって観察することにより、凹部Dの深さが設定深さWよりも小さいことを、ユーザは容易に視認することができる。
【0082】
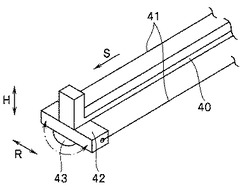
尚、以下、別の変形例を、図12を用いて示す。図12は、治具の凸部を半球状の部材から構成した変形例を示す部分斜視図である。
【0083】
上述した本実施の形態においては、軸部材2から高さ方向Hに設定高さaだけ突出する凸部は、回動部材3であると示したが、これに限らず、図12に示すように、凸部は、軸部材42の高さ方向Hの底面から半球状に突出する部材43であっても構わないことは勿論である他、他の形状を有する部材であっても構わない。
【0084】
また、図12に示す構成においては、軸部材42の方向Rにおける略中央部に、挿入方向Sに沿って細長であって、先端が高さ方向Hの上方へ曲げられたL字状部材40の先端が固定されている。尚、L字状部材40の上側の形状は、被検査対象であるパイプの上側にも同様のパイプが配列されている(不図示)環境下での使用も考慮し、上側のパイプを横方向の位置決め(横方向の規制)をするためのものである。また、L字状部材の先端に対して軸部材42は、回動自在に接続されている。
【0085】
また、軸部材42の方向Rにおける一端及び他端には、2本の牽引ワイヤ41の先端がそれぞれ接続されており、いずれか一方の牽引ワイヤ41が牽引されることにより、軸部材42は、0°〜90°の間において回動自在となっている。
【0086】
このことによれば、上述した図4、図5と同様に、方向Rにおける軸部材42の長さは、いずれか1つのワイヤ41を、軸部材42が90°回転するまで牽引すると、小さくなることから、方向Rにおける狭い間隔を有する空間に、軸部材42及び回動部材43を進入させやすくなる。
【0087】
さらには、牽引ワイヤ41の牽引量に応じて、軸部材42の延在方向を、0°〜90°の間において自由に可変することができることから、複雑な形状を有する測定対象物間に、軸部材42及び回動部材43を、不特定の方向から進入させやすくなる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0088】
尚、軸部材2の方向Rにおける幅を可変する構成としては、図13〜図15に示す構成も挙げられる。
【0089】
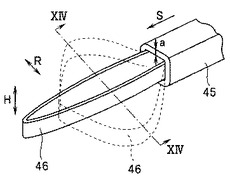
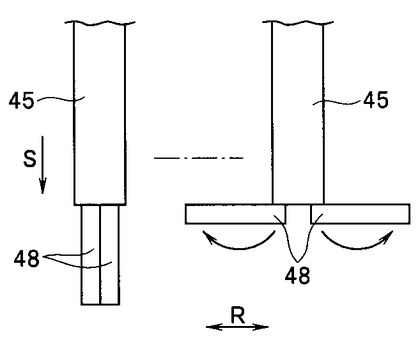
図13は、パイプ部材の先端開口から先端が折り曲げられたU字状の板材を挿入方向の前方に突出させた状態を示す部分斜視図、図14は、図13中のXIV-XIV線に沿う治具の断面を、パイプ部材とともに示す図、図15は、図13の板材を、開閉自在な2本の板材から構成した変形例を、板材の開成状態と閉成状態とで示す図である。
【0090】
図13に示すように、治具を、高さ方向Hに肉厚aを有する挿入方向Sに沿って細長なパイプ部材45と、該パイプ部材45内に挿通自在であって、パイプ部材45の先端開口から前方に突出する先端が折り曲げられたU字状の板材46とから構成しても構わない。
【0091】
パイプ部材45は、図14に示すように、凹部Dに嵌入される部位を構成している。尚、図14においては、凹部Dの設定深さWが、パイプ部材45に肉厚aに一致した図となっている。
【0092】
板材46は、基端側が牽引されると、図13の点線に示すように、方向Rに広がるよう構成されており、パイプ部材45が凹部Dに嵌入された際、方向Rに広がることにより、パイプ部材10の頂面10cに接触自在となっている。
【0093】
即ち、板材46は、本実施の形態の軸部材2に相当しており、凹部Dが設定深さWを有しているか否かを確認する場合には、頂面10cに対する板材46の接触を、ユーザは内視鏡50を用いて観察すれば良い。
【0094】
このような構成によれば、方向Rにおける狭い間隔を有する空間内に位置する凹部Dに対して治具を挿入する際、図13の実線に示すように、板材46における方向Rの幅がパイプ部材45よりも小さいことから容易に挿入でき、また、凹部Dの深さを測定する場合には、図13の点線に示すように、板材46を方向Rに広げることにより、確実にパイプ部材10の頂面10cに接触可能とすることができる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0095】
尚、図15に示すように、板材は、U字状に限らず、2本の板材48から構成されていても構わない。
【0096】
2本の板材48は、パイプ部材45内に挿通されており、パイプ部材45の先端開口から2本の板材48の先端側を前方に突出させた状態において、リンク機構等により、方向Rに開成自在となっている。尚、開成後、各板材は、上述した板材46と同様に、パイプ部材10の頂面10cに接触自在となっている。
【0097】
この図15に示す治具の構成においても、図13、図14に示す治具の構成と同様の効果を得ることができる。
尚、以下、図1の変形例を、図32、図33を用いて示す。図32は、図1の治具の軸部材の変形例を示す図、図33は、図32のフランジ部を凹部に嵌入させた状態を示す断面図である。
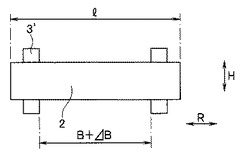
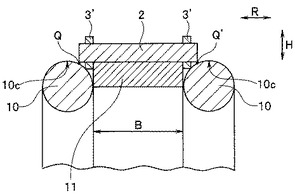
図1の変形として軸部材2を、図32、図33のようにしても良い。図32、図33に示すように、軸部材2に2本のフランジ部3’が設けられていても良い。2本のフランジ部3’は、保持部材11をレールとして滑ることが可能なように、2本のフランジ部3’の方向Rにおける幅は、保持部材11の幅BよりもΔBだけ若干広い幅B+ΔBを有している。
さらに、軸部材2の方向Rにおける幅lを短くして、軸部材2をパイプ部材10の頂部10cで接触させるのではなく、端部Q、Q’にて接触させても良い。この場合、治具1の大きさをコンパクトにすることができる。
また、このような構成においては、凹部Dの深さが設定値Wより深い(大きい)と、保持部材11と軸部材2とは隙間が発生し、設定W以下であると、隙間が無い状態となる。
【0098】
(第2実施の形態)
図16は、本実施の形態の内視鏡システムの治具を部分的に示す斜視図である。
この第2実施の形態の内視鏡システムの構成は、上述した図1〜図3に示した第1実施の形態の内視鏡システムと比して、治具の軸部材に回動部を設け、回動部がパイプ部材の頂面に接触する点が異なる。よって、この相違点のみを説明し、第1実施の形態と同様の構成には同じ符号を付し、その説明は省略する。
【0099】
図16に示すように、本実施の形態においては、治具1において、軸部材2は、回動部材3が設けられるとともにバネ部材4の先端が接続された非回動部2aと、非回動部2aに対して回動自在な、軸部材2の方向Rにおける一端及び他端側にそれぞれ位置する回動部2bとを具備して主要部が構成されている。
【0100】
回動部2bは、凹部Dに対して回動部材3が嵌入後、パイプ部材10の頂面10cに接触自在であり、外周面に位置決め指標2bsが形成されている。尚、非回動部2aの回動部2bに近接する部位の外周にも位置決め指標2asが設けられている。また、通常は、位置決め指標2asと位置決め指標2bsとはフリー状態で回動可能であり、凹部Dに入れる前に一致して位置した状態とする。
【0101】
このような構成によれば、凹部Dに回動部材3が嵌入後、一方、凹部Dの深さが、設定深さW以上の場合には、回動部2bがパイプ部材10の頂面10cに接触する。この接触状態において、治具を前方に移動させると、回動部2bは頂面10cに接触しながら回動することから、位置決め指標2asは、位置決め指標2bsに対してずれて位置する。
【0102】
他方、凹部Dの深さが設定深さWよりも小さい場合には、回動部2bは頂面10cに非接触となるため回動しないことから、位置決め指標2asは、位置決め指標2bsからずれることがない。
【0103】
よって、ユーザは、位置決め指標2bsに対する位置決め指標2asのずれを、内視鏡50に観察することにより、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0104】
(第3実施の形態)
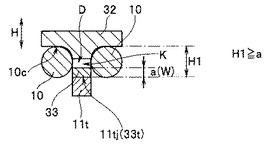
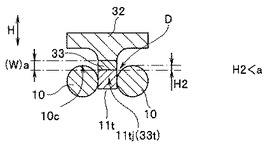
図17は、本実施の形態の内視鏡システムにおける治具の部分分解斜視図、図18は、凹部に治具の凸部が嵌入後、軸部材から凸部が分離した状態を示す断面図、図19は、凹部に治具の凸部が嵌入後、軸部材に凸部が接触したままの状態を示す断面図である。
【0105】
この第3実施の形態の内視鏡システムの構成は、上述した図1〜図3に示した第1実施の形態の内視鏡システムと比して、軸部材に対して凸部が分離する点が異なる。よって、この相違点のみを説明し、第1実施の形態と同様の構成には同じ符号を付し、その説明は省略する。
【0106】
図17に示すように、本実施の形態の内視鏡システムにおける治具は、軸部材32に対して凸部33が分離自在となっている。
【0107】
具体的には、軸部材32、凸部33は、例えば磁石から構成されており、磁力により軸部材32に対して凸部33が付着している。
【0108】
尚、凸部33の高さ方向Hの肉厚aは、設定深さWに一致している。また、軸部材32には、上述した第1実施の形態同様、バネ部材4の先端が接続されている。また、凸部33にも、バネ部材4と同様に機能を有するバネ部材34の先端が接続されており、バネ部材34の基端に、パイプ5と同様の機能を有するパイプ35の先端が固定されている。さらに、図示しないが、バネ部材34、パイプ35内には、ワイヤが挿通されており、該ワイヤの先端は、軸部材32に固定されている。
【0109】
このような構成によれば、凹部Dに対して凸部33が嵌入後、一方、図18に示すように、凹部Dの深さH1が、設定深さW以上、即ち、凸部33の肉厚a以上のときは(H1≧a)、軸部材32及び凸部33を前方に移動させていくと、軸部材32は、パイプ部材10の頂面10cに接触することから、頂面10cから抵抗を受けることにより、軸部材32に対して凸部33が分離する。特に、深さH1が肉厚aよりも大きいときは、凸部33の分離に伴い、軸部材32と凸部33との間に隙間Kが発生する。
【0110】
他方、図19に示すように、凹部Dの深さH2が設定深さWよりも小さい、即ち、凸部33の肉厚aよりも小さいときは(H2<a)、軸部材32は、パイプ部材10の頂面10cに非接触になるとともに、磁力により、凸部33は軸部材32に付着したままとなる。
【0111】
よって、ユーザは、内視鏡50を用いて、軸部材32に対する凸部33の分離の有無を観察するのみで、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。尚、その他の効果は、上述した第1実施の形態と同じである。
さらに、視認するだけでなく、磁石が離れたことを検出するセンサ、例えば、磁石の間隔を計測する変位計(コイルやレーザセンサ等)や、電流を流すことで接触の有無を確認できるセンサを設けてもよい。
【0112】
尚、以下、変形例を、図20を用いて示す。図20は、内視鏡の挿入部の外周側面に、治具を設けた変形例を示す図である。
【0113】
上述した第1〜第3実施の形態においては、治具1は、内視鏡50の挿入部50a内に設けられたチャンネル58内に挿通自在であって、チャンネル58の先端の開口から前方に突出した軸部材2、32と、回動部材3、凸部33とを用いて、凹部Dの深さを測定すると示した。
【0114】
これに限らず、図20に示すように、治具1は、内視鏡50の挿入部50aの外周側面に対して、挿入部50aを管路55の中心に位置させるセンタリング部材51とともに固定されていても構わない。
【0115】
尚、図20に示す構成においては、治具1は、軸部材2と、軸部材2に設けられた回動部材3と、内視鏡50の挿入部50aの外周側面に一端が接続され、他端が軸部材2に接続された回動部材30を管路55の内周面55nに付勢する付勢部材20とを具備して主要部が構成されている。尚、付勢部材20としては、エアシリンダや、バネ等が挙げられる。
【0116】
このような構成によれば、管路55内に内視鏡50の挿入部50aを挿入後、センタリング部材51及び回動部材3が内周面55nに接触した状態で、挿入部50aを回動した際、内周面55nに凹みUが形成されていると、回動部材3が凹みUの底面に接触するが、この際、凹みUが、回動部材3の肉厚aが設定深さに等しい場合、設定深さ以上だと、軸部材2が凹みU以外の内周面55nに接触する。
【0117】
このことから、ユーザは、軸部材2が内周面55nに接触した感覚から、容易に凹みUが設定深さ以上だと認識でき、管路55の内周面55nに大きな凹みUが形成されていると認識することができる。
【0118】
尚、このことは、凹みUに限らず、内周面55nに出っ張りが形成されている場合でも同様であり、出っ張りの高さが回動部材3の肉厚aに等しい場合、回動部材3が内周面55nに接触した状態で、軸部材2のみが出っ張りの頂部に接触することにより、ユーザは、軸部材2が出っ張りの頂部に接触した感覚から、容易に出っ張りが回動部材3の肉厚a以上だと認識でき、管路55の内周面55nに大きな出っ張りが形成されていると認識することができる。
【0119】
また、以下、別の変形例を、図21、図22を用いて示す。図21は、内視鏡の挿入部及び治具が挿通されるガイド部材を、ガイド部材から治具を取り出した状態で、保持部材及びパイプ部材とともに示す部分斜視図、図22は、図21の治具の軸部材を90°回転させた状態を示す図である。
【0120】
図21に示すように、治具1は、内視鏡50の挿入部50aとともに、ガイド部材60内のチャンネルに挿通されていても構わない。
【0121】
具体的には、ガイド部材60内には、挿入方向Sに沿って、内視鏡50の挿入部50aが挿通されるチャンネル68と、治具1が挿通されるチャンネル69とが設けられており、挿入部50a及び治具1は、各チャンネル68、69の先端開口から前方に突出自在である。
【0122】
また、ガイド部材60の先端側の一側面60qに、挿入方向Sに沿って、チャンネル69の先端開口からS1の長さ、スリット60sが形成されている。
【0123】
治具1は、挿入方向Sに沿って細長な肉厚aを有する板状部材63と、該板状部材63の先端に、方向Rの中央部が回動自在に固定された軸部材62とを具備して主要部が構成されている。尚、図21においては、治具1は、上下逆に示している。
【0124】
尚、軸部材62は、バネ65によって、図21に示すように、常に、方向RにR4の大きさを有して広がるよう構成されているが、チャンネル69内に位置している際は、チャンネル69内の壁面によって、図22に示すように、方向Rにおいて、R4よりも小さいR6の大きさ(R6<R4)となるよう回動されて収納されている。
【0125】
また、軸部材62は、板状部材63の先端の固定位置から方向Rにおける一端62iまたは他端62tまでの距離がR5に形成されており、距離R5がスリット60sの長さS1よりも小さいことにより(S1>R5)、板状部材63がチャンネル69内を前方に押し出されると、バネ65によって、スリット60sを介して、方向Rにおいて大きさR4まで広がる。
【0126】
反対に、板状部材63がチャンネル69内を後方に牽引されると、軸部材62は、他端62tが、ガイド部材60の先端面60mに接触することにより、図22に示すように、90°回転しながら、スリット60sを介してチャンネル69内に進入し、方向Rにおいて、方向RにおいてR6の大きさとなる。
【0127】
このような構成を有する内視鏡システム100を用いて凹部Dの深さを測定する場合には、先ず、板状部材63を、チャンネル69内において前方に押し出すことにより、スリット60sを介して、バネ65により、軸部材62は回動し、図21に示すように、先端面60mよりも前方において、R4の大きさまで広がる。
【0128】
その後、設定深さWに等しい肉厚aを有する板状部材63を凹部D内に嵌入させる。尚、図21に示すように、凹部Dを構成する保持部材11には、一番低い位置の底面11tjに指標11pが形成されている。
【0129】
この際、一方、凹部Dの深さが設定深さW以上の場合は、軸部材62は、パイプ部材10の頂面10cに接触する。他方、凹部Dの深さが設定深さWよりも小さい場合は、軸部材62は、頂面10cには接触しない。
【0130】
よって、頂面10cに対する軸部材62の接触の有無を、ガイド部材60のチャンネル68内に挿通された内視鏡50によって観察することにより、ユーザは、凹部Dが設定深さW以上か否かを容易に視認することができる。
【0131】
尚、図21、図22の構成では、板状部材63が、軸部材62に固定される凸部を兼ねているが、これに限らず、板状部材63に、別途凸部を設けても良いことは勿論である。
【0132】
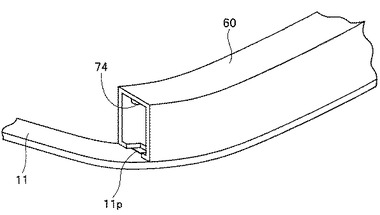
尚、以下、別の変形例を、図23〜図25を用いて示す。図23は、図20のガイド部材の構成の変形例を、パイプ部材及び保持部材とともに示す部分斜視図、図24は、図23中のIIXIV-IIXIV線に沿う治具及び凹部の断面図、図25は、ガイド部材に設けられたカメラを用いて、保持部材の指標を観察するガイド部材の変形例を示す斜視図である。尚、図25においては、羽根部材、パイプ部材は省略して示してある。
【0133】
図23に示すように、ガイド部材60の先端側の側面において、底面60tから高さ方向Hに設定深さWに等しいfの高さの位置に、羽根部材72がそれぞれ方向Rに沿って設けられている。
【0134】
尚、底面60tは、保持部材11の曲面形状に沿って曲面形状を有している。また、底面60tは開口されている。即ち、ガイド部材60は、高さ方向Hの断面が下向きのコの字形状を有している。
【0135】
また、ガイド部材60の上面には、高さ方向Hの上方から内視鏡57の挿入部が挿抜自在な孔60hが形成されている。該孔60hを介してガイド部材60内に導入された内視鏡57は、図24に示すように、底面60tの開口から保持部材11の上述した指標11pを観察する。尚、指標11pの観察は、内視鏡57に限らず、図25に示すように、ガイド部材60に設けられた、C−MOS等のカメラ74であっても構わない。
【0136】
ガイド部材60の先端側において、羽根部材72よりも高さ方向Hの下方の部位は、図24に示すように、凹部Dに嵌入される部位を構成している。
【0137】
また、羽根部材72は、図示しないリンク機構等によって開閉自在であり、ガイド部材60の先端側が凹部Dに嵌入された際、パイプ部材10の頂面10cに接触すると、ガイド部材60の側面に接触するよう跳ね上がる機能を有している。即ち、図23、図24に示すガイド部材60は、治具1を兼ねている。
【0138】
このような構成では、先ず、孔60hを介してガイド部材60内に挿入した内視鏡57を用いて、保持部材11の指標11pを観察して、底部11tを見つけた後、ガイド部材60の先端側を、凹部D内に嵌入させる。
【0139】
その後、一方、凹部Dの深さが、設定深さW以上であれば、羽根部材72は、パイプ部材10の頂面10cに接触し跳ね上がる。他方、凹部Dの深さが、設定深さWよりも小さければ、羽根部材72は頂面10cとは非接触となり、羽根部材72の位置は変わらない。
【0140】
このことを、ユーザは、内視鏡57、ガイド部材60は、別途に挿入した内視鏡54を用いて観察することにより、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。
【0141】
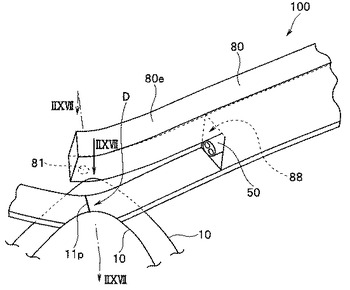
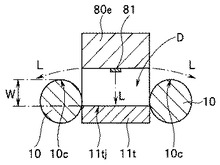
尚、ガイド部材を用いて凹部Dの深さを測定する他の構成としては、図26〜図28に示す構成が挙げられる。図26は、ガイド部材から照射するレーザ光を用いて、凹部の深さを測定するガイド部材の変形例の構成を、内視鏡、保持部材及びパイプ部材とともに示す部分斜視図、図27は、図26中のIIXVII-IIXVII線に沿う、ガイド部材及び凹部の断面図、図28は、図26のパイプ部材及び保持部材に照射されたレーザを、図26中のIIXVII方向からみた部分斜視図である。
【0142】
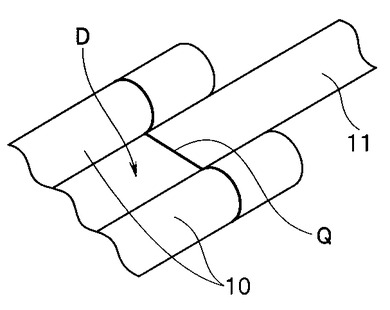
図26に示すように、ガイド部材8は、内視鏡50の挿入部50aが挿入されるチャンネル88の先端開口よりも前方に延出する部位80eを、チャンネル88よりも上部側に有しており、延出部位80eの先端側の底面には、ライン状のレーザ光L(図27)を照射するレーザ光照射部81が設けられている。
【0143】
このような構成によれば、図26、図27に示すように、保持部材11の底部11tの凹部Dの底面11tjに対して、レーザ光照射部81からライン状のレーザ光Lを照射すると、図28に示すように、レーザ光Lは、パイプ部材10及び保持部材11に対して、レーザラインQとして示される。
【0144】
このレーザラインQを、チャンネル88の先端開口から突出させた内視鏡50を用いて観察することにより、ユーザは、パイプ部材10の頂面10c及び凹部Dの底面11tjを容易に認識することができることから、既知のステレオ計測により、凹部Dの深さが設定深さW以上か否かを容易に認識することができる。
【0145】
尚、以下、図29〜図31を用いて別の変形例を示す。図29は、歪ゲージを用いて凹部の深さを計測する内視鏡システムの変形例の構成を示す斜視図、図30は、曲がった芯金により、軸部材の延在方向が可変された状態を示す部分斜視図、図31は、図29の軸部材の凸部が凹部に嵌入された状態の断面図である。
【0146】
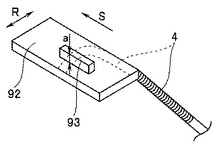
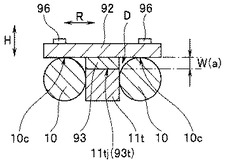
図29に示す構成においては、軸部材92は、平板状に形成されており、軸部材92の方向Rにおける中央部には、凸部93が設けられているとともに、凸部93が設けられた面とは反対側の面において、方向Rにおける一端側及び他端側には、歪ゲージ96がそれぞれ設けられている。
【0147】
また、パイプ5内には、操作部50bの挿入口50bsから、直線形状を有する芯金98や、先端側が湾曲形状を有する芯金99が挿通自在となっており、芯金99を挿通すると、図30に示すように方向Rに沿って延在していた軸部材92は、方向Sに沿って延在するようバネ部材4は湾曲する。
【0148】
凸部93は、凹部Dに嵌入される部位となっており、高さ方向Hにおいて、設定深さWに等しい肉厚aを有し、頂部93tが底面11tjに接触自在である。
【0149】
軸部材92は、凸部93が凹部Dに嵌入された際、パイプ部材10の頂面10cに接触自在である。尚、図31は、設定深さW=凸部93の肉厚aのとき、軸部材92が頂面10cに接触し、凸部93の頂部93tが底面11tjに接触している図となっている。
【0150】
このような構成によれば、凸部93を凹部D内に嵌入した際、一方、凹部Dの深さが設定深さW以上であれば、軸部材92は、パイプ部材10の頂面10cに接触する。その結果、歪ゲージ96の出力は変化することから、ユーザは、容易に凹部Dの深さが設定深さW以上であることを認識することができる。
【0151】
他方、凹部Dの深さが設定深さよりも小さい場合は、軸部材92は頂面10cには接触しない。よって、歪ゲージ96の出力に変化がないことから、ユーザは、凹部Dの深さが設定深さよりも小さいことを容易に認識することができる。以上、歪ゲージ96を用いて、凹部Dの深さを測定しても良い。
【0152】
尚、上述した第1〜第3実施の形態においては、測定対象物は、2本のパイプ部材であるとし、凹部Dは、2本のパイプ部材10と保持部材11の底部11tとの間の凹部を例に挙げて示したが、測定対象物は何でも良く、また、凹部であれば、どのような凹部であっても構わないことは勿論である。即ち、測定対象物に形成された凹部でもよいし、上述した第1〜第3実施の形態に示したように、測定対象物と他の部材とによって形成される凹部であっても構わない。さらに、凹部の形状もライン状であっても構わない。
【0153】
また、段差として、凹部を例に挙げて示したが、これに限らず、段差であれば、凹部に限定されない。即ち、単なる段差の深さを測定するのにも適用可能であることは云うまでもない。
尚、上述した第1〜第3実施の形態においては、バネ部材4について、コイル状の部材を用いていたが、これに限られるものではなく、例えば、弾性を有する部材であればなんでもよい。
【符号の説明】
【0154】
1…治具
2…軸部材
2a…非回動部
2as…位置決め指標
2b…回動部
2bs…位置決め指標
3…回動部材(凸部)
3t…回動部材の外周面(頂部)
4…バネ部材
8…ワイヤ(牽引部材)
9…径が異なる複数の部材
10…パイプ部材(測定対象物)
10c…パイプ部材の頂面(基準面)
11tj…凹部の底面
32…軸部材
33…凸部
33t…凸部の頂部
50…内視鏡
58…チャンネル
68…チャンネル
69…チャンネル
100…内視鏡システム
D…凹部(段差)
R…延在方向
S…挿入方向
W…設定深さ
【技術分野】
【0001】
本発明は、測定対象物の段差の深さを測定する治具と、内視鏡とを具備する内視鏡システムに関する。
【背景技術】
【0002】
従来、治具と内視鏡とを具備する内視鏡システムを用いて、遠隔操作にて測定対象物の段差の深さや、段差の間隔を測定する構成が周知である。
【0003】
例えば、特許文献1には、治具となるフレキシブルアームの先端にギャップ測定センサを設け、内視鏡の観察視野内において、ギャップ測定センサを測定対象物の段差の底面に垂直に突き当てることによって段差の高さを計測することにより、遠隔操作にて段差の深さを測定する内視鏡システムの構成が開示されている。
【0004】
また、特許文献2には、計測治具となるアームの先端側に、バネ状の歪みゲージ式ギャップセンサを設け、該ギャップセンサを、内視鏡の観察視野内における測定対象物間に挿入することにより、センサの歪みから遠隔操作にて測定対象物間の間隔を測定する内視鏡システムの構成が開示されている。
【0005】
さらに、特許文献3には、カメラを用いた観察視野内において、計測治具となるレーザ光発生装置から測定対象物に対してレーザ光を照射し、カメラによって撮像された観察画像に表示されたレーザ光の形状を判断して、遠隔操作にて測定対象物間の間隔を測定するシステムの構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−239040号公報
【特許文献2】特開平4−104004号公報
【特許文献3】特開平5−34490号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に開示された構成においては、測定対象物の段差の底面に対するギャップ測定センサの突き当て方向が、垂直方向に限定されてしまうため、段差が複雑な形状を有する測定対象物内における入り込んだ場所に位置している場合には、遠隔操作にて、段差の底面に対してギャップ測定センサを垂直に突き当てることができない、または突き当て難いといった問題があった。尚、この問題は、仮に、特許文献2に開示されたギャップセンサを用いて段差の深さを測定する場合であっても同様である。
【0008】
また、特許文献3に開示された構成を、段差の深さを測定するのに適用した場合であっても、段差が複雑な形状を有する測定対象物内に位置している場合には、段差に対してレーザ光が照射し難いため、段差の深さを測定し難いといった問題があった。
【0009】
さらに、特許文献1〜3の構成では、段差の深さを測定する構成が複雑であり、段差の深さの正確な値を必要とせず、段差の深さが設定深さに形成されているか否かを確認するだけの作業を行う場合には、より簡単に段差の深さを測定できる構成が望まれていた。
【0010】
本発明は、上記問題点及び事情に鑑みてなされたものであり、内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明の一態様における内視鏡システムは、測定対象物の基準面に少なくとも一部が接触自在な軸部材と、前記測定対象物の前記基準面に対して凹んで形成された段差に嵌入自在であるとともに、前記段差における前記基準面よりも設定深さ凹んで位置する底面に接触自在な、前記軸部材から前記設定深さと同じ高さ突出する凸部とを有する治具と、少なくとも前記治具を観察する内視鏡と、を具備し、前記軸部材は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さ以上のとき前記基準面に接触するとともに前記段差の深さが前記凸部の高さよりも小さいとき前記基準面に非接触となり、前記内視鏡は、前記段差に前記凸部が嵌入後、少なくとも前記基準面への前記軸部材の接触の有無を観察する。
【発明の効果】
【0012】
本発明によれば、内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施の形態の内視鏡システムを、パイプ部材及び保持部材とともに示す部分斜視図
【図2】図1中のII-II線に沿う治具及び凹部の断面図
【図3】図1中の治具の挿入方向の先端側を示す斜視図
【図4】図1の治具における軸部材の延在方向の一端に、牽引部材が接続されている状態を概略的に示す部分斜視図
【図5】図4の牽引部材が牽引されて軸部材の延在方向を可変した状態を概略的に示す部分斜視図
【図6】図1の治具の軸部材の延在方向の一端及び他端に、それぞれ径が異なる複数の部材が着脱自在な構成を、内視鏡の挿入部とともに示す部分斜視図
【図7】図6の軸部材に径が異なる部材が装着された後の軸部材及び回動部材、凹部の断面図
【図8】図1の治具における軸部材が、延在方向に伸縮自在な構成を概略的に示す部分斜視図
【図9】2つの回動部材に設けられた観察レンズを用いて、凹部の深さ及び傾きを検出する内視鏡システムの構成を示す部分斜視図
【図10】2つの回動部材に設けられたレーザ光照射部を用いて、凹部の深さを測定する内視鏡システムの構成を示す部分斜視図
【図11】図10の回動部材を、図10中のXI方向からみた側面図
【図12】治具の凸部を半球状の部材から構成した変形例を示す部分斜視図
【図13】パイプ部材の先端開口から先端が折り曲げられたU字状の板材を挿入方向の前方に突出させた状態を示す部分斜視図
【図14】図13中のXIV-XIV線に沿う治具の断面を、パイプ部材とともに示す図
【図15】図13の板材を、開閉自在な2本の板材から構成した変形例を、板材の開成状態と閉成状態とで示す図
【図16】第2実施の形態の内視鏡システムの治具を部分的に示す斜視図
【図17】第3実施の形態の内視鏡システムにおける治具の部分分解斜視図
【図18】凹部に治具の凸部が嵌入後、軸部材から凸部が分離した状態を示す断面図
【図19】凹部に治具の凸部が嵌入後、軸部材に凸部が接触したままの状態を示す断面図
【図20】内視鏡の挿入部の外周側面に、治具を設けた変形例を示す図
【図21】内視鏡の挿入部及び治具が挿通されるガイド部材を、ガイド部材から治具を取り出した状態で、保持部材及びパイプ部材とともに示す部分斜視図
【図22】図21の治具の軸部材を90°回転させた状態を示す図
【図23】図20のガイド部材の構成の変形例を、パイプ部材及び保持部材とともに示す部分斜視図
【図24】図23中のIIXIV-IIXIV線に沿う治具及び凹部の断面図
【図25】ガイド部材に設けられたカメラを用いて、保持部材の指標を観察するガイド部材の変形例を示す斜視図
【図26】ガイド部材から照射するレーザ光を用いて、凹部の深さを測定するガイド部材の変形例の構成を、内視鏡、保持部材及びパイプ部材とともに示す部分斜視図
【図27】図26中のIIXVII-IIXVII線に沿う、ガイド部材及び凹部の断面図
【図28】図26のパイプ部材及び保持部材に照射されたレーザを、図26中のIIXVII方向からみた部分斜視図
【図29】歪ゲージを用いて凹部の深さを計測する内視鏡システムの変形例の構成を示す斜視図
【図30】曲がった芯金により、軸部材の延在方向が可変された状態を示す部分斜視図
【図31】図29の軸部材の凸部が凹部に嵌入された状態の断面図
【図32】図1の治具の軸部材の変形例を示す図
【図33】図32のフランジ部を凹部に嵌入させた状態を示す断面図
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施の形態を説明する。尚、以下に示す実施の形態においては、測定対象物は、パイプ部材10を例に挙げ、段差は、2本のパイプ部材10と保持部材11とにより形成された凹部Dを例に挙げて示す。
【0015】
(第1実施の形態)
図1は、本実施の形態の内視鏡システムを、パイプ部材及び保持部材とともに示す部分斜視図、図2は、図1中のII-II線に沿う治具及び凹部の断面図、図3は、図1中の治具の挿入方向の先端側を示す斜視図である。
【0016】
図1に示すように、内視鏡システム100は、治具1と、少なくとも治具1を観察する内視鏡50とにより主要部が構成されている。
【0017】
図1〜図3に示すように、治具1は、軸部材2と、凸部である回動部材3と、バネ部材4と、パイプ5と、ワイヤ6とを具備して主要部が構成されている。
【0018】
治具1は、バネ部材4、パイプ5、ワイヤ6が、内視鏡50の挿入部50a内に設けられた後述するチャンネル58(図6参照)に対し、挿入部50aの先端部50asの先端面に設けられたチャンネル58の開口を介して挿入方向Sの前方から挿通自在となっているとともに、挿通後、少なくとも軸部材2と回動部材3とが、チャンネル58の開口から挿入方向Sの前方(以下、単に前方を称す)に突出して位置する。
【0019】
尚、図1は、軸部材2及び回動部材3に加え、バネ部材4もチャンネル58の開口から前方に突出した状態を示している。
【0020】
軸部材2は、円柱状または円筒状の部材から方向Rに沿って細長に形成されており、図1、図2に示すように、2本のパイプ部材10の基準面となる頂面10cに、少なくとも一部が接触自在となっている。尚、軸部材2の形状は、円柱状または円筒状に限定されない。
【0021】
回動部材3は、高さ方向Hに肉厚aを有して軸部材2の方向Rにおける略中央部の外周に対して回動自在な部材であり、例えばベアリングから構成されている。即ち、回動部材3は、軸部材2の外周から高さ方向Hに高さaだけ突出している。尚、肉厚aは、後述する凹部Dの設定深さWに一致する大きさに設定されている。
【0022】
また、図1〜図3においては、回動部材3は方向Rにおいて設定間隔を有して2つ設けられているが1つであっても構わない。また、2つの回動部材3の方向Rにおける間隔は、2本のパイプ部材10の方向Rにおける間隔、即ち凹部Dの間隔よりも狭く設定されている。
【0023】
回動部材3は、2本のパイプ部材10の頂面10cに対して凹んで形成された凹部Dに対して嵌入自在であり、頂部を構成する外周面3tが、凹部Dの底面11tjに接触自在となっている。
【0024】
凹部Dは、2本のパイプ部材10と、方向Rにおいて2本のパイプ部材10間に頂面10cよりも底部11tが高さ方向Hにおいて低く位置する曲面形状を有する板状の保持部材11とにより構成されている。
【0025】
また、保持部材11の底部11tの上面11tjは、頂面10cよりも設定深さWだけ凹んで位置している。即ち、底部11tの上面11tjは、凹部Dの底面を構成している。
【0026】
尚、図2においては、設定深さW=回動部材3の肉厚aの場合において、回動部材3の外周面3tが凹部Dの底面11tjに接触し、軸部材2がパイプ部材10の頂面10cに接触する図を示している。
【0027】
バネ部材4は、挿入方向Sに沿って細長なコイル状部材から構成されており、一端である挿入方向Sの先端(以下、単に先端と称す)が、例えば軸部材2の回動部材3間に接続されている。
【0028】
尚、バネ部材4の他端である挿入方向Sの基端(以下、単に基端と称す)には、パイプ5の先端が固定されている。
【0029】
パイプ5の基端は、内視鏡50の操作部に設けられたチャンネル58の入口から内視鏡50外に露出して位置している。
【0030】
尚、パイプ5は必ずしも必要ではなく、凹部Dが複雑に入り込んだ場所に形成されている場合には、凹部Dへの回動部材3の嵌入性を向上させるため、パイプ5の代わりにバネ部材4が、該バネ部材4の基端がチャンネル58の入口から内視鏡50外に露出する長さに形成されていても良い。
【0031】
また、バネ部材4及びパイプ5内には、ワイヤ6若しくはロッド(ファイバロッドのように曲げ可能)が挿通されている。ワイヤ6の先端は軸部材2に固定されており、基端はチャンネル58の入口から内視鏡50外に露出して位置している。
【0032】
尚、ワイヤ6は、バネ部材4及びパイプ5に対して相対的に挿入方向Sの前後に移動自在となっている。
【0033】
バネ部材4は、湾曲自在なことにより、凹部Dへ不特定の方向から遠隔操作にて回動部材3を嵌入させやすくするものである。
【0034】
パイプ5及びワイヤ6は、基端側から前方に押し込まれることにより、凹部Dに回動部材3が嵌入するよう、回動部材3及び軸部材2を移動させるものである。よって、上述したように、パイプ5の代わりにバネ部材4が、該バネ部材4の基端がチャンネル58の入口から内視鏡50外に露出する長さに形成されている場合には、バネ部材4が、基端側からワイヤ6とともに前方に押し込まれることにより、凹部Dに回動部材3が嵌入するよう、回動部材3及び軸部材2を移動させる部材を構成する。
【0035】
尚、ワイヤ6は、パイプ5の基端の位置を固定した状態で基端側から前方に押し込まれることにより、バネ部材4を挿入方向Sに伸張させて、バネ部材4の挿入方向Sにおける長さを可変する機能を有している。これにより、位置を長手方向に微調整しようとしたときに有効となる。
【0036】
内視鏡50は、挿入部50aの先端部50asの先端面に設けられた対物レンズ55(図6参照)を用いて、少なくとも2つのパイプ部材10の頂面10cに対する軸部材2の接触の有無を観察するものである。
【0037】
次に、本実施の形態の作用について説明する。
先ず、凹部Dの深さが設定深さWか否かを測定する場合には、ユーザは、パイプ5及びワイヤ6の基端側を押し込むことにより、内視鏡50のチャンネル58の先端開口から前方に突出させた治具1の回動部材3の外周面3tを、内視鏡50の観察視野内において、遠隔操作にて保持部材11の上面11jに接触させた状態で移動させ、その後、凹部D内に挿入させる。尚、回動部材3の凹部Dへの嵌入は、治具1を移動させずに、内視鏡50の挿入部50aの基端側を前方に押し込むことによって行っても構わない。
【0038】
この際、チャンネル58の先端開口から前方に突出しているバネ部材4が湾曲自在なことにより、治具1の先端側を湾曲させることができることから、凹部Dが入り込んだ場所に位置していたとしても、遠隔操作にて不特定の方向から回動部材3を凹部D内に嵌入させることが容易となる。
【0039】
凹部D内への回動部材3の嵌入後、凹部Dの深さが、回動部材3の肉厚a以上のときは、軸部材2は頂面10cに接触する。一方、凹部Dの深さが肉厚aよりも大きい場合には、底面11tjに対して回動部材3の外周面3tは非接触となる。
【0040】
この頂面10cへの軸部材2の接触を、内視鏡50の対物レンズ55によって観察することにより、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さW以上である、即ち、パイプ部材10の振動を抑制するために保持部材11の底部11tが問題の無い深さに固定されていることを容易に内視鏡によって視認することができる。
【0041】
尚、ユーザは、軸部材2が頂面10cへ接触した際、バネ部材4、パイプ5及びワイヤ6を介して、パイプ5及びワイヤ6の基端側を把持するユーザに伝達される振動からも、頂面10cへの軸部材2の接触を感覚的に認識でき、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さW以上であることを容易に内視鏡によって認識することができる。
【0042】
他方、凹部Dの深さが回動部材3の肉厚aよりも小さいときは、軸部材2は、頂面10cに非接触となる。尚、凹部Dの深さが、肉厚a以下のときは、底面11tjに外周面3tが接触する。
【0043】
この頂面10cへの軸部材2の非接触を、内視鏡50の対物レンズ55によって観察することにより、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも小さいことを容易に視認することができる。
【0044】
本実施の形態においては、凹部Dへの回動部材3の嵌入後、パイプ部材10の頂面10cに対する軸部材2の接触の有無を内視鏡50によって観察することにより、凹部Dの深さが設定深さWかどうかを認識できる。
【0045】
このことによれば、ユーザは、内視鏡50を用いて頂面10cに対して軸部材2の接触の有無を観察することができる。
【0046】
また、本実施の形態においては、軸部材2と該軸部材2を移動させるパイプ5との間に、バネ部材4が設けられていると示した。
【0047】
このことによれば、バネ部材4は、湾曲自在なことから凹部Dが入り込んだ場所に位置していたとしても、不特定の方向から回動部材3を、遠隔操作にて凹部D内に嵌入させることが容易となる。
【0048】
以上から、内視鏡50の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具1を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システム100を提供することができる。
【0049】
尚、以下、変形例を示す。本実施の形態においては、パイプ部材10の頂面10cに対する軸部材2の接触の有無を内視鏡50によって観察することにより、凹部Dの深さが設定深さW以上に設定されているか否かをユーザに認識させると示した。
【0050】
これに限らず、保持部材11の底部11tの底面11tjに対する回動部材3の外周面3tの接触の有無により、凹部Dの深さが設定深さWよりも大きく設定されているか否かをユーザに認識させても構わない。
【0051】
具体的には、凹部D内への回動部材3の嵌入後、凹部Dの深さが、回動部材3の肉厚aよりも大きいときは、保持部材11の上面11jに接触していた回動部材3の外周面3tは、保持部材11に非接触となる。即ち、凹部Dの底面11tjに、回動部材3の外周面3tは非接触となる。
【0052】
この底面11tjに回動部材3の外周面3tが非接触な状態を、内視鏡50の対物レンズ55によって観察することによっても、ユーザは、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも大きいことを容易に内視鏡によって視認することができる。
【0053】
尚、保持部材11の上面11jに接触していた回動部材3の外周面3tが、凹部Dに嵌入後、底面11tjに非接触になることにより、バネ部材4、パイプ5及びワイヤ6を介して、パイプ5及びワイヤ6の基端側を把持することで、伝達される保持部材11の上面11jに回動部材3の外周面3tが接触され、底面11tjへの回動部材3の外周面3tの非接触を感覚的に認識でき、凹部Dの深さが、回動部材3の肉厚aに等しい設定深さWよりも大きいことを容易に認識することができる。
【0054】
尚、以下、変形例を、図4、図5を用いて示す。図4は、図1の治具における軸部材の延在方向の一端に、牽引部材が接続されている状態を概略的に示す部分斜視図、図5は、図4の牽引部材が牽引されて軸部材の延在方向を可変した状態を概略的に示す部分斜視図である。
【0055】
図4に示すように、軸部材2の方向Rにおける一端に、牽引部材であるワイヤ8の一端が接続されていても良い。尚、ワイヤ8は、軸部材2の方向Rにおける他端に接続されていても構わない。
【0056】
このような構成によれば、ワイヤ8を後方に牽引すると、図4に示すように、方向Rに沿って延在していた軸部材2は、図5に示すように、バネ部材4の湾曲に伴い挿入方向Sに沿って延在する。
【0057】
このことから、方向Rにおける軸部材2の長さは、牽引後小さくなることから(R2<R1)、方向Rにおける狭い間隔を有する空間に、軸部材2及び回動部材3を進入させやすくなる。
【0058】
さらには、ワイヤ8の牽引量に応じて、軸部材2の延在方向を、0°〜90°の間において自由に可変することができることから、複雑な形状を有する測定対象物間に、軸部材及び回動部材3を、不特定の方向から進入させやすくなる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0059】
また、以下、別の変形例を、図6、図7を用いて示す。図6は、図1の治具の軸部材の延在方向の一端及び他端に、それぞれ径が異なる複数の部材が着脱自在な構成を、内視鏡の挿入部とともに示す部分斜視図、図7は、図6の軸部材に径が異なる部材が装着された後の軸部材及び回動部材、凹部の断面図である。
【0060】
図6に示すように、軸部材2の方向Rにおける一端及び他端に、雌ねじ部3fが形成されており、該雌ねじ部3fに、径bの異なる複数の部材9、9’の雄ねじ部9mが螺合自在なことにより、軸部材2の方向Rの一端及び他端に、径bの異なる複数の部材9、9’が着脱自在であっても構わない。
これは、測定する凹部Dの深さに応じて交換してさまざまな寸法に対応するものである。
【0061】
尚、軸部材2の一端及び他端に装着される部材9、9’は、それぞれ同じ径のものが用いられる。また、図7(a)に示すように、部材9は、凹部Dに回動部材3が嵌入し、凹部Dの深さが図2の場合に比べて浅いW’の設定のとき、軸部材2よりも太い部材9を装着してパイプ部材10の頂面10c若しくは保持部材11の底部11tjに接触する状態で、設定値のW’より大きい、小さいを判断するものである。さらに、図7(b)に示すように、軸部材2よりも細い部材9’を装着するときは、設定値は、Wより深いW’’の場合である。
【0062】
このような構成によれば、軸部材2の方向Rの一端及び他端に装着される部材9の径bを変えるのみで、保持部材11の底部11tの底面11tjに対する回動部材3の外周面3tの接触高さを可変することができることから、径bの異なる部材9を変更するのみで、容易に、異なる大きさの設定深さWを測定することができる。具体的には、頂面10c
と底面11tjの深さが、設定深さW1、W2、W3、W4・・・以上か否かを、設定深さに応じて選択した径bの異なる部材9を変更するのみで容易に測定することができる。
【0063】
尚、当然、回動部材3の肉厚aを可変することにより、異なる大きさの設定深さWを測定しても良い。その他の効果は、上述した第1実施の形態と同じである。
【0064】
尚、以下、別の変形例を、図8を用いて示す。図8は、図1の治具における軸部材が、延在方向に伸縮自在な構成を概略的に示す部分斜視図である。
【0065】
図8に示すように、軸部材2が方向Rに伸縮自在な構成であっても構わない。具体的には、軸部材2の方向Rの一端と他端とにエア供給チューブ22、23を接続し、エア供給チューブ22から軸部材2にエアを供給すると、軸部材2が方向Rに伸張し、エア供給チューブ23から軸部材2にエアを供給すると、軸部材2が方向Rに収縮する構成であっても構わない。
【0066】
このような構成によれば、方向Rにおける軸部材2の長さを可変することができることから、方向Rにおける狭い空間に対しても、軸部材2を進入させやすくなる他、方向Rにおいて大きな間隔を有するパイプ部材10の頂面10cにも、確実に軸部材2を接触させることが可能となる。その他の効果は、上述した第1実施の形態と同じである。
【0067】
尚、以下、別の変形例を、図9を用いて示す。図9は、2つの回動部材に設けられた観察レンズを用いて、凹部の深さ及び傾きを検出する内視鏡システムの構成を示す部分斜視図である。
【0068】
上述した本実施の形態においては、凹部Dに回動部材3が嵌入された際、頂面10cに対する軸部材2の接触の有無を観察することにより、凹部Dの深さが設定深さW以上か否かを測定すると示した。
【0069】
これに限らず、治具に設けた2つの観察レンズによって、凹部Dの深さを測定する構成であっても構わない。
【0070】
具体的には、図9に示すように、挿入部50aの先端部50asの先端面に対物レンズ52、53を有する内視鏡50の先端部50asの先端面に着脱自在な治具において、軸部材2の方向Rにおける一端及び他端に回動部材3がそれぞれ設けられているとともに、各回動部材3の方向Sに沿った側面の開口に、方向RにおけるRi方向を観察する観察レンズ25、方向RにおけるRi方向とは反対のRt方向を観察する観察レンズ26が設けられている。
【0071】
対物レンズ52は、先端面に治具が装着され、凹部Dに回動部材3が嵌入された後、観察レンズ25を介して、凹部D内のRi方向の像を観察する。
【0072】
対物レンズ53は、先端面に治具が装着され、凹部Dに回動部材3が嵌入された後、観察レンズ26を介して、凹部D内のRt方向の像を観察する。
【0073】
よって、対物レンズ52、53によって観察される2つの画像は、凹部Dの深さに応じて2つのパイプ部材10の頂面10cが予め設定された画像として、不図示の表示部に表示される。ユーザは、表示部に表示された2つの画像から、頂面10cの位置により、凹部Dの深さが設定深さW以上か否かを容易に内視鏡によって視認することができる。また、表示部に表示される2つの画像において、頂面10cの位置が決まった位置より下方に表示される場合や、凹部の壁面しか表示されない場合、ユーザは、凹部Dの深さが設定深さW以上であることを容易に内視鏡によって視認することができる。
【0074】
さらには、ユーザは、2つの画像から、各画像の2つの頂面10cの位置が、ずれているか否かを確認することによって、底面11tjが傾いているか否かを容易に視認することができる。
また、2つの画像を同じ位置に合わせて比較して差があるときは、底面が傾いているので正確な検査が行われていないと判断することができる。
なお、上述したように、一画面に2つの画像を表示するようにしなくとも、画像処理を用いて双方の画像の傾き具合を比較演算するようにして、傾き或いは正確な検査が行われていないであろうと判断したときに警告表示するようにしてもよい。
【0075】
尚、以下、別の変形例を、図10、図11を用いて示す。図10は、2つの回動部材に設けられたレーザ光照射部を用いて、凹部の深さを測定する内視鏡システムの構成を示す部分斜視図、図11は、図10の回動部材を、図10中のXI方向からみた側面図である。
【0076】
上述した本実施の形態においては、凹部Dに回動部材3が嵌入された際、頂面10cに対する軸部材2の接触の有無を観察することにより、凹部Dの深さが、設定深さW以上か否かを測定すると示した。
【0077】
これに限らず、治具に設けた2つのレーザ光照射部によって、凹部Dの深さを測定する構成であっても構わない。
【0078】
具体的には、図10に示すように、軸部材2の方向Rにおける一端及び他端に、回動部材3がそれぞれ設けられており、各回動部材3の挿入方向Sに沿った側面の中央に、レーザ光照射部27がそれぞれ設けられている。尚、図11に示すように、レーザ光照射部27は、回動部材3の外周縁からcの距離に位置している。また、距離cは、設定深さWに一致している。
【0079】
また、軸部材2、バネ部材4、パイプ5内には、レーザ光照射部27に、可視可能なレーザ光を供給する供給ファイバ59が挿通されている。レーザ光照射部27は、方向RにおけるRi方向とRi方向とは反対のRt方向に、レーザ光を供給する。
【0080】
このような構成によれば、凹部D内に回動部材3を嵌入させ、レーザ光照射部27からレーザ光が照射された際、一方、凹部Dの深さが距離cよりも大きければ、レーザ光は、パイプ部材10の側面に照射されることから、パイプ部材10に照射されるレーザ光を内視鏡50の対物レンズ55によって観察することにより、凹部Dの深さが設定深さWよりも大きいことをユーザは容易に視認することができる。
【0081】
他方、凹部Dの深さが距離cよりも小さければ、レーザ光はパイプ部材10には照射されないことから、このことを内視鏡50の対物レンズ55によって観察することにより、凹部Dの深さが設定深さWよりも小さいことを、ユーザは容易に視認することができる。
【0082】
尚、以下、別の変形例を、図12を用いて示す。図12は、治具の凸部を半球状の部材から構成した変形例を示す部分斜視図である。
【0083】
上述した本実施の形態においては、軸部材2から高さ方向Hに設定高さaだけ突出する凸部は、回動部材3であると示したが、これに限らず、図12に示すように、凸部は、軸部材42の高さ方向Hの底面から半球状に突出する部材43であっても構わないことは勿論である他、他の形状を有する部材であっても構わない。
【0084】
また、図12に示す構成においては、軸部材42の方向Rにおける略中央部に、挿入方向Sに沿って細長であって、先端が高さ方向Hの上方へ曲げられたL字状部材40の先端が固定されている。尚、L字状部材40の上側の形状は、被検査対象であるパイプの上側にも同様のパイプが配列されている(不図示)環境下での使用も考慮し、上側のパイプを横方向の位置決め(横方向の規制)をするためのものである。また、L字状部材の先端に対して軸部材42は、回動自在に接続されている。
【0085】
また、軸部材42の方向Rにおける一端及び他端には、2本の牽引ワイヤ41の先端がそれぞれ接続されており、いずれか一方の牽引ワイヤ41が牽引されることにより、軸部材42は、0°〜90°の間において回動自在となっている。
【0086】
このことによれば、上述した図4、図5と同様に、方向Rにおける軸部材42の長さは、いずれか1つのワイヤ41を、軸部材42が90°回転するまで牽引すると、小さくなることから、方向Rにおける狭い間隔を有する空間に、軸部材42及び回動部材43を進入させやすくなる。
【0087】
さらには、牽引ワイヤ41の牽引量に応じて、軸部材42の延在方向を、0°〜90°の間において自由に可変することができることから、複雑な形状を有する測定対象物間に、軸部材42及び回動部材43を、不特定の方向から進入させやすくなる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0088】
尚、軸部材2の方向Rにおける幅を可変する構成としては、図13〜図15に示す構成も挙げられる。
【0089】
図13は、パイプ部材の先端開口から先端が折り曲げられたU字状の板材を挿入方向の前方に突出させた状態を示す部分斜視図、図14は、図13中のXIV-XIV線に沿う治具の断面を、パイプ部材とともに示す図、図15は、図13の板材を、開閉自在な2本の板材から構成した変形例を、板材の開成状態と閉成状態とで示す図である。
【0090】
図13に示すように、治具を、高さ方向Hに肉厚aを有する挿入方向Sに沿って細長なパイプ部材45と、該パイプ部材45内に挿通自在であって、パイプ部材45の先端開口から前方に突出する先端が折り曲げられたU字状の板材46とから構成しても構わない。
【0091】
パイプ部材45は、図14に示すように、凹部Dに嵌入される部位を構成している。尚、図14においては、凹部Dの設定深さWが、パイプ部材45に肉厚aに一致した図となっている。
【0092】
板材46は、基端側が牽引されると、図13の点線に示すように、方向Rに広がるよう構成されており、パイプ部材45が凹部Dに嵌入された際、方向Rに広がることにより、パイプ部材10の頂面10cに接触自在となっている。
【0093】
即ち、板材46は、本実施の形態の軸部材2に相当しており、凹部Dが設定深さWを有しているか否かを確認する場合には、頂面10cに対する板材46の接触を、ユーザは内視鏡50を用いて観察すれば良い。
【0094】
このような構成によれば、方向Rにおける狭い間隔を有する空間内に位置する凹部Dに対して治具を挿入する際、図13の実線に示すように、板材46における方向Rの幅がパイプ部材45よりも小さいことから容易に挿入でき、また、凹部Dの深さを測定する場合には、図13の点線に示すように、板材46を方向Rに広げることにより、確実にパイプ部材10の頂面10cに接触可能とすることができる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0095】
尚、図15に示すように、板材は、U字状に限らず、2本の板材48から構成されていても構わない。
【0096】
2本の板材48は、パイプ部材45内に挿通されており、パイプ部材45の先端開口から2本の板材48の先端側を前方に突出させた状態において、リンク機構等により、方向Rに開成自在となっている。尚、開成後、各板材は、上述した板材46と同様に、パイプ部材10の頂面10cに接触自在となっている。
【0097】
この図15に示す治具の構成においても、図13、図14に示す治具の構成と同様の効果を得ることができる。
尚、以下、図1の変形例を、図32、図33を用いて示す。図32は、図1の治具の軸部材の変形例を示す図、図33は、図32のフランジ部を凹部に嵌入させた状態を示す断面図である。
図1の変形として軸部材2を、図32、図33のようにしても良い。図32、図33に示すように、軸部材2に2本のフランジ部3’が設けられていても良い。2本のフランジ部3’は、保持部材11をレールとして滑ることが可能なように、2本のフランジ部3’の方向Rにおける幅は、保持部材11の幅BよりもΔBだけ若干広い幅B+ΔBを有している。
さらに、軸部材2の方向Rにおける幅lを短くして、軸部材2をパイプ部材10の頂部10cで接触させるのではなく、端部Q、Q’にて接触させても良い。この場合、治具1の大きさをコンパクトにすることができる。
また、このような構成においては、凹部Dの深さが設定値Wより深い(大きい)と、保持部材11と軸部材2とは隙間が発生し、設定W以下であると、隙間が無い状態となる。
【0098】
(第2実施の形態)
図16は、本実施の形態の内視鏡システムの治具を部分的に示す斜視図である。
この第2実施の形態の内視鏡システムの構成は、上述した図1〜図3に示した第1実施の形態の内視鏡システムと比して、治具の軸部材に回動部を設け、回動部がパイプ部材の頂面に接触する点が異なる。よって、この相違点のみを説明し、第1実施の形態と同様の構成には同じ符号を付し、その説明は省略する。
【0099】
図16に示すように、本実施の形態においては、治具1において、軸部材2は、回動部材3が設けられるとともにバネ部材4の先端が接続された非回動部2aと、非回動部2aに対して回動自在な、軸部材2の方向Rにおける一端及び他端側にそれぞれ位置する回動部2bとを具備して主要部が構成されている。
【0100】
回動部2bは、凹部Dに対して回動部材3が嵌入後、パイプ部材10の頂面10cに接触自在であり、外周面に位置決め指標2bsが形成されている。尚、非回動部2aの回動部2bに近接する部位の外周にも位置決め指標2asが設けられている。また、通常は、位置決め指標2asと位置決め指標2bsとはフリー状態で回動可能であり、凹部Dに入れる前に一致して位置した状態とする。
【0101】
このような構成によれば、凹部Dに回動部材3が嵌入後、一方、凹部Dの深さが、設定深さW以上の場合には、回動部2bがパイプ部材10の頂面10cに接触する。この接触状態において、治具を前方に移動させると、回動部2bは頂面10cに接触しながら回動することから、位置決め指標2asは、位置決め指標2bsに対してずれて位置する。
【0102】
他方、凹部Dの深さが設定深さWよりも小さい場合には、回動部2bは頂面10cに非接触となるため回動しないことから、位置決め指標2asは、位置決め指標2bsからずれることがない。
【0103】
よって、ユーザは、位置決め指標2bsに対する位置決め指標2asのずれを、内視鏡50に観察することにより、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。尚、その他の効果は、上述した第1実施の形態と同じである。
【0104】
(第3実施の形態)
図17は、本実施の形態の内視鏡システムにおける治具の部分分解斜視図、図18は、凹部に治具の凸部が嵌入後、軸部材から凸部が分離した状態を示す断面図、図19は、凹部に治具の凸部が嵌入後、軸部材に凸部が接触したままの状態を示す断面図である。
【0105】
この第3実施の形態の内視鏡システムの構成は、上述した図1〜図3に示した第1実施の形態の内視鏡システムと比して、軸部材に対して凸部が分離する点が異なる。よって、この相違点のみを説明し、第1実施の形態と同様の構成には同じ符号を付し、その説明は省略する。
【0106】
図17に示すように、本実施の形態の内視鏡システムにおける治具は、軸部材32に対して凸部33が分離自在となっている。
【0107】
具体的には、軸部材32、凸部33は、例えば磁石から構成されており、磁力により軸部材32に対して凸部33が付着している。
【0108】
尚、凸部33の高さ方向Hの肉厚aは、設定深さWに一致している。また、軸部材32には、上述した第1実施の形態同様、バネ部材4の先端が接続されている。また、凸部33にも、バネ部材4と同様に機能を有するバネ部材34の先端が接続されており、バネ部材34の基端に、パイプ5と同様の機能を有するパイプ35の先端が固定されている。さらに、図示しないが、バネ部材34、パイプ35内には、ワイヤが挿通されており、該ワイヤの先端は、軸部材32に固定されている。
【0109】
このような構成によれば、凹部Dに対して凸部33が嵌入後、一方、図18に示すように、凹部Dの深さH1が、設定深さW以上、即ち、凸部33の肉厚a以上のときは(H1≧a)、軸部材32及び凸部33を前方に移動させていくと、軸部材32は、パイプ部材10の頂面10cに接触することから、頂面10cから抵抗を受けることにより、軸部材32に対して凸部33が分離する。特に、深さH1が肉厚aよりも大きいときは、凸部33の分離に伴い、軸部材32と凸部33との間に隙間Kが発生する。
【0110】
他方、図19に示すように、凹部Dの深さH2が設定深さWよりも小さい、即ち、凸部33の肉厚aよりも小さいときは(H2<a)、軸部材32は、パイプ部材10の頂面10cに非接触になるとともに、磁力により、凸部33は軸部材32に付着したままとなる。
【0111】
よって、ユーザは、内視鏡50を用いて、軸部材32に対する凸部33の分離の有無を観察するのみで、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。尚、その他の効果は、上述した第1実施の形態と同じである。
さらに、視認するだけでなく、磁石が離れたことを検出するセンサ、例えば、磁石の間隔を計測する変位計(コイルやレーザセンサ等)や、電流を流すことで接触の有無を確認できるセンサを設けてもよい。
【0112】
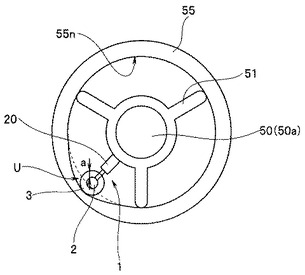
尚、以下、変形例を、図20を用いて示す。図20は、内視鏡の挿入部の外周側面に、治具を設けた変形例を示す図である。
【0113】
上述した第1〜第3実施の形態においては、治具1は、内視鏡50の挿入部50a内に設けられたチャンネル58内に挿通自在であって、チャンネル58の先端の開口から前方に突出した軸部材2、32と、回動部材3、凸部33とを用いて、凹部Dの深さを測定すると示した。
【0114】
これに限らず、図20に示すように、治具1は、内視鏡50の挿入部50aの外周側面に対して、挿入部50aを管路55の中心に位置させるセンタリング部材51とともに固定されていても構わない。
【0115】
尚、図20に示す構成においては、治具1は、軸部材2と、軸部材2に設けられた回動部材3と、内視鏡50の挿入部50aの外周側面に一端が接続され、他端が軸部材2に接続された回動部材30を管路55の内周面55nに付勢する付勢部材20とを具備して主要部が構成されている。尚、付勢部材20としては、エアシリンダや、バネ等が挙げられる。
【0116】
このような構成によれば、管路55内に内視鏡50の挿入部50aを挿入後、センタリング部材51及び回動部材3が内周面55nに接触した状態で、挿入部50aを回動した際、内周面55nに凹みUが形成されていると、回動部材3が凹みUの底面に接触するが、この際、凹みUが、回動部材3の肉厚aが設定深さに等しい場合、設定深さ以上だと、軸部材2が凹みU以外の内周面55nに接触する。
【0117】
このことから、ユーザは、軸部材2が内周面55nに接触した感覚から、容易に凹みUが設定深さ以上だと認識でき、管路55の内周面55nに大きな凹みUが形成されていると認識することができる。
【0118】
尚、このことは、凹みUに限らず、内周面55nに出っ張りが形成されている場合でも同様であり、出っ張りの高さが回動部材3の肉厚aに等しい場合、回動部材3が内周面55nに接触した状態で、軸部材2のみが出っ張りの頂部に接触することにより、ユーザは、軸部材2が出っ張りの頂部に接触した感覚から、容易に出っ張りが回動部材3の肉厚a以上だと認識でき、管路55の内周面55nに大きな出っ張りが形成されていると認識することができる。
【0119】
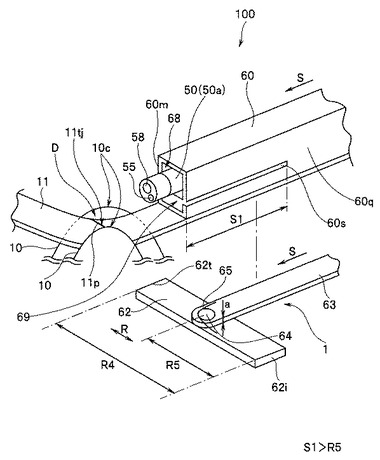
また、以下、別の変形例を、図21、図22を用いて示す。図21は、内視鏡の挿入部及び治具が挿通されるガイド部材を、ガイド部材から治具を取り出した状態で、保持部材及びパイプ部材とともに示す部分斜視図、図22は、図21の治具の軸部材を90°回転させた状態を示す図である。
【0120】
図21に示すように、治具1は、内視鏡50の挿入部50aとともに、ガイド部材60内のチャンネルに挿通されていても構わない。
【0121】
具体的には、ガイド部材60内には、挿入方向Sに沿って、内視鏡50の挿入部50aが挿通されるチャンネル68と、治具1が挿通されるチャンネル69とが設けられており、挿入部50a及び治具1は、各チャンネル68、69の先端開口から前方に突出自在である。
【0122】
また、ガイド部材60の先端側の一側面60qに、挿入方向Sに沿って、チャンネル69の先端開口からS1の長さ、スリット60sが形成されている。
【0123】
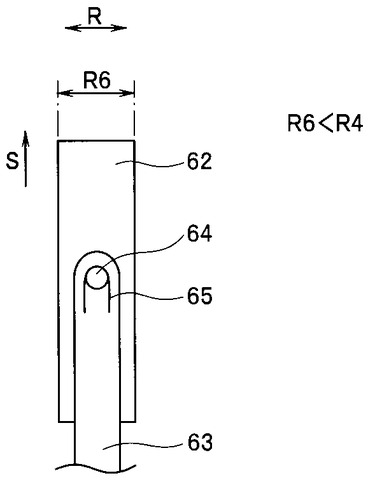
治具1は、挿入方向Sに沿って細長な肉厚aを有する板状部材63と、該板状部材63の先端に、方向Rの中央部が回動自在に固定された軸部材62とを具備して主要部が構成されている。尚、図21においては、治具1は、上下逆に示している。
【0124】
尚、軸部材62は、バネ65によって、図21に示すように、常に、方向RにR4の大きさを有して広がるよう構成されているが、チャンネル69内に位置している際は、チャンネル69内の壁面によって、図22に示すように、方向Rにおいて、R4よりも小さいR6の大きさ(R6<R4)となるよう回動されて収納されている。
【0125】
また、軸部材62は、板状部材63の先端の固定位置から方向Rにおける一端62iまたは他端62tまでの距離がR5に形成されており、距離R5がスリット60sの長さS1よりも小さいことにより(S1>R5)、板状部材63がチャンネル69内を前方に押し出されると、バネ65によって、スリット60sを介して、方向Rにおいて大きさR4まで広がる。
【0126】
反対に、板状部材63がチャンネル69内を後方に牽引されると、軸部材62は、他端62tが、ガイド部材60の先端面60mに接触することにより、図22に示すように、90°回転しながら、スリット60sを介してチャンネル69内に進入し、方向Rにおいて、方向RにおいてR6の大きさとなる。
【0127】
このような構成を有する内視鏡システム100を用いて凹部Dの深さを測定する場合には、先ず、板状部材63を、チャンネル69内において前方に押し出すことにより、スリット60sを介して、バネ65により、軸部材62は回動し、図21に示すように、先端面60mよりも前方において、R4の大きさまで広がる。
【0128】
その後、設定深さWに等しい肉厚aを有する板状部材63を凹部D内に嵌入させる。尚、図21に示すように、凹部Dを構成する保持部材11には、一番低い位置の底面11tjに指標11pが形成されている。
【0129】
この際、一方、凹部Dの深さが設定深さW以上の場合は、軸部材62は、パイプ部材10の頂面10cに接触する。他方、凹部Dの深さが設定深さWよりも小さい場合は、軸部材62は、頂面10cには接触しない。
【0130】
よって、頂面10cに対する軸部材62の接触の有無を、ガイド部材60のチャンネル68内に挿通された内視鏡50によって観察することにより、ユーザは、凹部Dが設定深さW以上か否かを容易に視認することができる。
【0131】
尚、図21、図22の構成では、板状部材63が、軸部材62に固定される凸部を兼ねているが、これに限らず、板状部材63に、別途凸部を設けても良いことは勿論である。
【0132】
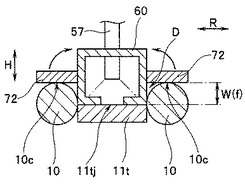
尚、以下、別の変形例を、図23〜図25を用いて示す。図23は、図20のガイド部材の構成の変形例を、パイプ部材及び保持部材とともに示す部分斜視図、図24は、図23中のIIXIV-IIXIV線に沿う治具及び凹部の断面図、図25は、ガイド部材に設けられたカメラを用いて、保持部材の指標を観察するガイド部材の変形例を示す斜視図である。尚、図25においては、羽根部材、パイプ部材は省略して示してある。
【0133】
図23に示すように、ガイド部材60の先端側の側面において、底面60tから高さ方向Hに設定深さWに等しいfの高さの位置に、羽根部材72がそれぞれ方向Rに沿って設けられている。
【0134】
尚、底面60tは、保持部材11の曲面形状に沿って曲面形状を有している。また、底面60tは開口されている。即ち、ガイド部材60は、高さ方向Hの断面が下向きのコの字形状を有している。
【0135】
また、ガイド部材60の上面には、高さ方向Hの上方から内視鏡57の挿入部が挿抜自在な孔60hが形成されている。該孔60hを介してガイド部材60内に導入された内視鏡57は、図24に示すように、底面60tの開口から保持部材11の上述した指標11pを観察する。尚、指標11pの観察は、内視鏡57に限らず、図25に示すように、ガイド部材60に設けられた、C−MOS等のカメラ74であっても構わない。
【0136】
ガイド部材60の先端側において、羽根部材72よりも高さ方向Hの下方の部位は、図24に示すように、凹部Dに嵌入される部位を構成している。
【0137】
また、羽根部材72は、図示しないリンク機構等によって開閉自在であり、ガイド部材60の先端側が凹部Dに嵌入された際、パイプ部材10の頂面10cに接触すると、ガイド部材60の側面に接触するよう跳ね上がる機能を有している。即ち、図23、図24に示すガイド部材60は、治具1を兼ねている。
【0138】
このような構成では、先ず、孔60hを介してガイド部材60内に挿入した内視鏡57を用いて、保持部材11の指標11pを観察して、底部11tを見つけた後、ガイド部材60の先端側を、凹部D内に嵌入させる。
【0139】
その後、一方、凹部Dの深さが、設定深さW以上であれば、羽根部材72は、パイプ部材10の頂面10cに接触し跳ね上がる。他方、凹部Dの深さが、設定深さWよりも小さければ、羽根部材72は頂面10cとは非接触となり、羽根部材72の位置は変わらない。
【0140】
このことを、ユーザは、内視鏡57、ガイド部材60は、別途に挿入した内視鏡54を用いて観察することにより、凹部Dの深さが設定深さW以上か否かを容易に視認することができる。
【0141】
尚、ガイド部材を用いて凹部Dの深さを測定する他の構成としては、図26〜図28に示す構成が挙げられる。図26は、ガイド部材から照射するレーザ光を用いて、凹部の深さを測定するガイド部材の変形例の構成を、内視鏡、保持部材及びパイプ部材とともに示す部分斜視図、図27は、図26中のIIXVII-IIXVII線に沿う、ガイド部材及び凹部の断面図、図28は、図26のパイプ部材及び保持部材に照射されたレーザを、図26中のIIXVII方向からみた部分斜視図である。
【0142】
図26に示すように、ガイド部材8は、内視鏡50の挿入部50aが挿入されるチャンネル88の先端開口よりも前方に延出する部位80eを、チャンネル88よりも上部側に有しており、延出部位80eの先端側の底面には、ライン状のレーザ光L(図27)を照射するレーザ光照射部81が設けられている。
【0143】
このような構成によれば、図26、図27に示すように、保持部材11の底部11tの凹部Dの底面11tjに対して、レーザ光照射部81からライン状のレーザ光Lを照射すると、図28に示すように、レーザ光Lは、パイプ部材10及び保持部材11に対して、レーザラインQとして示される。
【0144】
このレーザラインQを、チャンネル88の先端開口から突出させた内視鏡50を用いて観察することにより、ユーザは、パイプ部材10の頂面10c及び凹部Dの底面11tjを容易に認識することができることから、既知のステレオ計測により、凹部Dの深さが設定深さW以上か否かを容易に認識することができる。
【0145】
尚、以下、図29〜図31を用いて別の変形例を示す。図29は、歪ゲージを用いて凹部の深さを計測する内視鏡システムの変形例の構成を示す斜視図、図30は、曲がった芯金により、軸部材の延在方向が可変された状態を示す部分斜視図、図31は、図29の軸部材の凸部が凹部に嵌入された状態の断面図である。
【0146】
図29に示す構成においては、軸部材92は、平板状に形成されており、軸部材92の方向Rにおける中央部には、凸部93が設けられているとともに、凸部93が設けられた面とは反対側の面において、方向Rにおける一端側及び他端側には、歪ゲージ96がそれぞれ設けられている。
【0147】
また、パイプ5内には、操作部50bの挿入口50bsから、直線形状を有する芯金98や、先端側が湾曲形状を有する芯金99が挿通自在となっており、芯金99を挿通すると、図30に示すように方向Rに沿って延在していた軸部材92は、方向Sに沿って延在するようバネ部材4は湾曲する。
【0148】
凸部93は、凹部Dに嵌入される部位となっており、高さ方向Hにおいて、設定深さWに等しい肉厚aを有し、頂部93tが底面11tjに接触自在である。
【0149】
軸部材92は、凸部93が凹部Dに嵌入された際、パイプ部材10の頂面10cに接触自在である。尚、図31は、設定深さW=凸部93の肉厚aのとき、軸部材92が頂面10cに接触し、凸部93の頂部93tが底面11tjに接触している図となっている。
【0150】
このような構成によれば、凸部93を凹部D内に嵌入した際、一方、凹部Dの深さが設定深さW以上であれば、軸部材92は、パイプ部材10の頂面10cに接触する。その結果、歪ゲージ96の出力は変化することから、ユーザは、容易に凹部Dの深さが設定深さW以上であることを認識することができる。
【0151】
他方、凹部Dの深さが設定深さよりも小さい場合は、軸部材92は頂面10cには接触しない。よって、歪ゲージ96の出力に変化がないことから、ユーザは、凹部Dの深さが設定深さよりも小さいことを容易に認識することができる。以上、歪ゲージ96を用いて、凹部Dの深さを測定しても良い。
【0152】
尚、上述した第1〜第3実施の形態においては、測定対象物は、2本のパイプ部材であるとし、凹部Dは、2本のパイプ部材10と保持部材11の底部11tとの間の凹部を例に挙げて示したが、測定対象物は何でも良く、また、凹部であれば、どのような凹部であっても構わないことは勿論である。即ち、測定対象物に形成された凹部でもよいし、上述した第1〜第3実施の形態に示したように、測定対象物と他の部材とによって形成される凹部であっても構わない。さらに、凹部の形状もライン状であっても構わない。
【0153】
また、段差として、凹部を例に挙げて示したが、これに限らず、段差であれば、凹部に限定されない。即ち、単なる段差の深さを測定するのにも適用可能であることは云うまでもない。
尚、上述した第1〜第3実施の形態においては、バネ部材4について、コイル状の部材を用いていたが、これに限られるものではなく、例えば、弾性を有する部材であればなんでもよい。
【符号の説明】
【0154】
1…治具
2…軸部材
2a…非回動部
2as…位置決め指標
2b…回動部
2bs…位置決め指標
3…回動部材(凸部)
3t…回動部材の外周面(頂部)
4…バネ部材
8…ワイヤ(牽引部材)
9…径が異なる複数の部材
10…パイプ部材(測定対象物)
10c…パイプ部材の頂面(基準面)
11tj…凹部の底面
32…軸部材
33…凸部
33t…凸部の頂部
50…内視鏡
58…チャンネル
68…チャンネル
69…チャンネル
100…内視鏡システム
D…凹部(段差)
R…延在方向
S…挿入方向
W…設定深さ
【特許請求の範囲】
【請求項1】
測定対象物の基準面に少なくとも一部が接触自在な軸部材と、
前記測定対象物の前記基準面に対して凹んで形成された段差に嵌入自在であるとともに、前記段差における前記基準面よりも設定深さ凹んで位置する底面に接触自在な、前記軸部材から前記設定深さと同じ高さ突出する凸部と、
を有する治具と、
少なくとも前記治具を観察する内視鏡と、
を具備し、
前記軸部材は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さ以上のとき前記基準面に接触するとともに前記段差の深さが前記凸部の高さよりも小さいとき前記基準面に非接触となり、
前記内視鏡は、前記段差に前記凸部が嵌入後、少なくとも前記基準面への前記軸部材の接触の有無を観察することを特徴とする内視鏡システム。
【請求項2】
前記凸部の頂部は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さよりも大きいとき前記底面に非接触になり、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記底面への前記凸部の前記頂部の接触の有無を観察することを特徴とする請求項1に記載の内視鏡システム。
【請求項3】
前記軸部材は、非回動部と、前記基準面に接触自在な回動部とを具備しているとともに、前記非回動部及び前記回動部に、位置決め指標が設けられており、
前記回動部の位置決め指標は、前記段差に前記凸部が嵌入後、前記軸部材が移動された際、前記段差の深さが前記凸部の高さ以上のとき前記回動部が前記基準面に接触しながら回動移動することによって、前記非回動部の前記位置決め指標からずれて位置するとともに、前記段差の深さが前記凸部の高さよりも小さいとき前記回動部が前記基準面に非接触なことにより、前記非回動部の前記位置決め指標に一致しており、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記非回動部の前記位置決め指標に対する前記回動部の前記位置決め指標のずれの有無を観察することを特徴とする請求項1または2に記載の内視鏡システム。
【請求項4】
前記軸部材に対して前記凸部は分離自在であり、
前記凸部は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部よりも小さいとき、前記軸部材に接触し、前記段差の深さが前記凸部の高さ以上のとき前記軸部材から分離し、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記軸部材に対する前記凸部の分離の有無を観察することを特徴とする請求項1に記載の内視鏡システム。
【請求項5】
前記治具は、前記内視鏡の挿入部内のチャンネルに挿通されており、
少なくとも前記軸部材及び前記凸部が、前記チャンネルにおける前記挿入部の挿入方向先端側の開口から、前記挿入方向の前方に突出して位置していることを特徴とする請求項1〜4のいずれか1項に記載の内視鏡システム。
【請求項6】
前記治具は、ガイド部材内のチャンネルに挿通されており、
少なくとも前記軸部材及び前記凸部が、前記チャンネルにおける前記ガイド部材の挿入方向先端側の開口から、前記挿入方向の前方に突出して位置していることを特徴とする請求項1〜4のいずれか1項に記載の内視鏡システム。
【請求項7】
前記内視鏡は、前記ガイド部材の前記治具が挿通されたチャンネルとは異なるチャンネルに挿通されていることを特徴とする請求項6に記載の内視鏡システム。
【請求項8】
前記凸部は、前記軸部材の外周に設けられた回動部材であることを特徴とする請求項1〜3、5〜7のいずれか1項に記載の内視鏡システム。
【請求項9】
前記軸部材の一端には、弾性部材が接続され、
前記軸部材の延在方向の一端と他端との少なくとも一方に、牽引に伴い前記軸部材の前記延在方向を可変する牽引部材が接続されていることを特徴とする請求項1〜8のいずれか1項に記載の内視鏡システム。
【請求項10】
前記軸部材に対して、それぞれ径が異なる複数の部材が着脱自在となっており、
前記複数の部材は、前記軸部材に装着後、前記軸部材の前記基準面に接触する部位を構成することを特徴とする請求項1〜9のいずれか1項に記載の内視鏡システム。
【請求項11】
前記軸部材は、延在方向に伸縮自在であることを特徴とする請求項1〜9のいずれか1項に記載の内視鏡システム。
【請求項1】
測定対象物の基準面に少なくとも一部が接触自在な軸部材と、
前記測定対象物の前記基準面に対して凹んで形成された段差に嵌入自在であるとともに、前記段差における前記基準面よりも設定深さ凹んで位置する底面に接触自在な、前記軸部材から前記設定深さと同じ高さ突出する凸部と、
を有する治具と、
少なくとも前記治具を観察する内視鏡と、
を具備し、
前記軸部材は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さ以上のとき前記基準面に接触するとともに前記段差の深さが前記凸部の高さよりも小さいとき前記基準面に非接触となり、
前記内視鏡は、前記段差に前記凸部が嵌入後、少なくとも前記基準面への前記軸部材の接触の有無を観察することを特徴とする内視鏡システム。
【請求項2】
前記凸部の頂部は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部の高さよりも大きいとき前記底面に非接触になり、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記底面への前記凸部の前記頂部の接触の有無を観察することを特徴とする請求項1に記載の内視鏡システム。
【請求項3】
前記軸部材は、非回動部と、前記基準面に接触自在な回動部とを具備しているとともに、前記非回動部及び前記回動部に、位置決め指標が設けられており、
前記回動部の位置決め指標は、前記段差に前記凸部が嵌入後、前記軸部材が移動された際、前記段差の深さが前記凸部の高さ以上のとき前記回動部が前記基準面に接触しながら回動移動することによって、前記非回動部の前記位置決め指標からずれて位置するとともに、前記段差の深さが前記凸部の高さよりも小さいとき前記回動部が前記基準面に非接触なことにより、前記非回動部の前記位置決め指標に一致しており、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記非回動部の前記位置決め指標に対する前記回動部の前記位置決め指標のずれの有無を観察することを特徴とする請求項1または2に記載の内視鏡システム。
【請求項4】
前記軸部材に対して前記凸部は分離自在であり、
前記凸部は、前記段差に前記凸部が嵌入後、前記段差の深さが前記凸部よりも小さいとき、前記軸部材に接触し、前記段差の深さが前記凸部の高さ以上のとき前記軸部材から分離し、
前記内視鏡は、前記段差に前記凸部が嵌入後、さらに前記軸部材に対する前記凸部の分離の有無を観察することを特徴とする請求項1に記載の内視鏡システム。
【請求項5】
前記治具は、前記内視鏡の挿入部内のチャンネルに挿通されており、
少なくとも前記軸部材及び前記凸部が、前記チャンネルにおける前記挿入部の挿入方向先端側の開口から、前記挿入方向の前方に突出して位置していることを特徴とする請求項1〜4のいずれか1項に記載の内視鏡システム。
【請求項6】
前記治具は、ガイド部材内のチャンネルに挿通されており、
少なくとも前記軸部材及び前記凸部が、前記チャンネルにおける前記ガイド部材の挿入方向先端側の開口から、前記挿入方向の前方に突出して位置していることを特徴とする請求項1〜4のいずれか1項に記載の内視鏡システム。
【請求項7】
前記内視鏡は、前記ガイド部材の前記治具が挿通されたチャンネルとは異なるチャンネルに挿通されていることを特徴とする請求項6に記載の内視鏡システム。
【請求項8】
前記凸部は、前記軸部材の外周に設けられた回動部材であることを特徴とする請求項1〜3、5〜7のいずれか1項に記載の内視鏡システム。
【請求項9】
前記軸部材の一端には、弾性部材が接続され、
前記軸部材の延在方向の一端と他端との少なくとも一方に、牽引に伴い前記軸部材の前記延在方向を可変する牽引部材が接続されていることを特徴とする請求項1〜8のいずれか1項に記載の内視鏡システム。
【請求項10】
前記軸部材に対して、それぞれ径が異なる複数の部材が着脱自在となっており、
前記複数の部材は、前記軸部材に装着後、前記軸部材の前記基準面に接触する部位を構成することを特徴とする請求項1〜9のいずれか1項に記載の内視鏡システム。
【請求項11】
前記軸部材は、延在方向に伸縮自在であることを特徴とする請求項1〜9のいずれか1項に記載の内視鏡システム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】

【図24】
【図25】
【図26】
【図27】
【図28】
【図29】

【図30】
【図31】
【図32】
【図33】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【公開番号】特開2012−242562(P2012−242562A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−111779(P2011−111779)
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]