
内視鏡外科用クリップ取付器
【課題】内視鏡外科用クリップ取付器を提供する。
【解決手段】身体組織に外科用クリップを取り付けるための本装置10は、ハンドル部分12およびそのハンドル部分12から遠位方向に延び、且つ、長手方向軸を定めている本体14を有している。また、本装置10は、その本体14の内部に配置された複数の外科用クリップ、および前述の本体14の遠位端部に隣接して取り付けられたジョーアセンブリ16も有している。このジョーアセンブリ16は、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート、および、それらのジョー部分が離間配置位置にあるときに、外科用クリップをジョーアセンブリ16へ向けて個別的に遠位方向へ進行させることができるように構成されたクリッププッシャーも有している。
【解決手段】身体組織に外科用クリップを取り付けるための本装置10は、ハンドル部分12およびそのハンドル部分12から遠位方向に延び、且つ、長手方向軸を定めている本体14を有している。また、本装置10は、その本体14の内部に配置された複数の外科用クリップ、および前述の本体14の遠位端部に隣接して取り付けられたジョーアセンブリ16も有している。このジョーアセンブリ16は、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート、および、それらのジョー部分が離間配置位置にあるときに、外科用クリップをジョーアセンブリ16へ向けて個別的に遠位方向へ進行させることができるように構成されたクリッププッシャーも有している。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の引用)
本特許出願は、2004年10月8日に出願された、米国仮特許出願第60/617,104号、および、2004年10月8日に出願された、米国仮特許出願第60/617,016号に対する優先権を主張し、これらの出願は、共に、その全体が本明細書中に参考として援用される。
【0002】
(技術分野)
本技術分野は外科用クリップ取付器に関係する。より詳細には、本開示は、外科用クリップの挿入中にジョー構造を安定化させるための機構を有する、内視鏡外科用のクリップ取付器に関係する。
【背景技術】
【0003】
(関連技術の説明)
内視鏡用のステープラーおよびクリップ取付器は、当技術分野において既知であり、数多くの別個の有用な外科的手技で使用されている。腹腔鏡を用いる外科的手技のケースにおいては、腹部の内部へのアクセスは、皮膚に設けられた小さな入口切開部から挿入された細いチューブまたはカニューレを通じて達成される。身体の別な箇所で行われる侵襲性の極めて少ない手技は、一般的に、内視鏡的処置と呼ばれることが多い。典型的には、チューブまたはカニューレ装置が、アクセスポートをもたらすための入口切開部を通じて患者の身体内に伸ばされる。このポートにより、外科医師は、トロカールを用いてそこから数多くの異なる手術器械を挿入することができ、また、切開部から遠く離れた箇所で外科的手技を実施することができる。
【0004】
大多数のこれらの手技の間、外科医師は、一つもしくはそれ以上の脈管を通じる血液または他の流体の流れを停止させなければならないことが多い。外科医師は、しばしば、血管または他の管路に外科用クリップを取り付け、その手技の間、そこを通じる体液の流れを阻止するであろう。体腔への進入中に単一のクリップを取り付けるための内視鏡用クリップ取付器が当技術分野において知られている。そのような単一のクリップ取付器は、典型的には生体適合性材料から製作され、通常、脈管上において圧縮される。脈管に適用されると、その圧縮されたクリップは、その脈管を通じる流体の流れを停止させる。
【0005】
体腔内への単一の進入の間に内視鏡的処置または腹腔鏡的処置において複数のクリップを取り付けることができる内視鏡用クリップ取付器が、Greenらに付与された、同一出願人による特許文献1および特許文献2に記載されており、これらの両特許は、参照により、それらの内容全体が本明細書に組み入れられる。内視鏡用の別の多重クリップ取付器が、Prattらに付与された、同一出願人による特許文献3に開示されており、この特許も、参照により、その内容全体が本明細書に組み入れられる。これらの装置は、必ずということではないが、典型的には単回の外科的手技で使用される。米国特許出願第08/515,341号(Pierらに付与された特許文献4)は再滅菌可能な外科用クリップ取付器を開示しており、この特許の開示内容は、これをもって、参照により本明細書に組み入れられる。このクリップ取付器は、体腔内への単一の挿入で、複数のクリップを体腔内へ進行させ、複数のクリップを形成する。この再滅菌可能なクリップ取付器は、体腔内への単一の進入で複数のクリップを進行させ、且つ、複数のクリップを形成するため、交換可能なクリップマガジンを受け入れることができ、且つ、そのクリップマガジンと協同することができるように構成されている。一つの重要な設計目標は、装填手技によってクリップが何ら圧縮されることなく、外科用クリップをそれらのジョーの間に装填できるようにすることである。装填中に生じるクリップのそのような撓みまたは捻れは、しばしば、数多くの予期せぬ結果を引き起こす。装填中に生じるそのような圧縮は、それらのジョーの間のクリップのアラインメントを僅かに変えてしまう可能性がある。これは、外科医師が、そのクリップを廃棄するため、それらのジョーの間からクリップを取り除かねばならない事態を招くであろう。さらに、このようなプレ装填圧縮は、クリップの一部を圧縮し、クリップの幾何学的形状を変えてしまう可能性がある。これは、外科医師が、そのクリップを廃棄するため、それらのジョーの間から圧縮されたクリップを取り除かねばならない事態を招くであろう。
内視鏡的処置または腹腔鏡的処置は、切開部から遠く離れた箇所で行われることが多い。その結果として、これらのクリップの適用は、視野が狭くなることにより、またはこの装置の近位端部におけるユーザーに対する触覚フィードバックが低減することにより、複雑なものになりかねない。従って、ユーザーに対して個々のクリップのファイヤリング(firing)、装填装置内に含まれているクリップの使い果たし、または何らかの他の外科的事象の指示を提供することにより、器械の操作を改善することが望ましい。また、クリップの成功裏の装填を促進し、そして、開いた状態の外科用クリップ取付器のジョーを割り込ませ、その後、クリップのあらゆる損傷または過剰な圧縮を防止し、且つ、ファイヤリングの前にクリップに及ぼされるジョーの圧縮を防ぐため、それらのジョーの間にクリップを装填する外科用クリップ取付器を提供することも望ましい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第5,084,057号明細書
【特許文献2】米国特許第5,100,420号明細書
【特許文献3】米国特許第5,607,436号明細書
【特許文献4】米国特許第5,695,502号明細書
【発明の概要】
【課題を解決するための手段】
【0007】
(要旨)
本開示の第一の側面によれば、身体組織へ外科用クリップを取り付けるための装置が提供され、その装置は、ハンドル部分およびそのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体を有している。また、この装置は、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリも有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート、および、それらのジョー部分が離間配置位置にあるときに、外科用クリップをジョーアセンブリへ向けて個別的に遠位方向へ進行させることができるように構成されたクリッププッシャーも有している。尚もさらに、本装置は、本体の内部に少なくとも部分的に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ、および、それらのジョー部分を近接配置位置へ動かすことができるように、前述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材も有している。
【0008】
本開示の別の側面によれば、本装置は、ウェッジプレートが第一および第二のジョー部分の間を長手方向に移動したときに、それらの第一および第二のジョー部分を付勢するウェッジプレートを有している。このウェッジプレートは、クリップの装填中、第一および第二のジョー部分を予め定められた一定の関係に維持する。この予め定められた一定の関係により、クリップを装填している間に生じる第一および第二のジョー部材の屈曲が防止される。
【0009】
本開示の別の側面によれば、本装置は、丸みを帯びた遠位先端を伴うウェッジプレートを有している。
【0010】
本開示の別の側面によれば、本装置は、第一の近位窓を伴うウェッジプレートを有している。この第一の近位窓は、本体内に配置されたある部材により係合されるべく成されており、また、最も遠位側の位置でウェッジプレートを保持することができるように構成されている。前述の最も遠位側の位置は、第一および第二のジョー部材の間である。
【0011】
本開示の別の側面によれば、本装置は、第二の近位窓を伴うウェッジプレートを有している。この第二の近位窓は上述の部材により係合されるべく成されており、また、第二の近位窓は最も近位側の位置でウェッジプレートを保持することができるように構成されている。この最も近位側の位置は、第一および第二のジョー部材から後ろよりの位置である。ウェッジプレートの最も近位側の位置は、第一および第二のジョー部材がクリップを圧縮することができるように構成されている。
【0012】
本開示の別の側面によれば、本装置は、アクチュエータにより第二の近位窓から第一の近位窓へ移動可能な部材を有している。このアクチュエータはウェッジプレートを遠位方向に移動させる。前述の部材は、ウェッジプレートが遠位方向に移動するときに、第二の近位窓から第一の近位窓へ移動する。
【0013】
本開示の別の側面によれば、上述のアクチュエータはさらにカムリンクを含んでいる。このカムリンクは、ウェッジプレートに設けられたカムスロットと係合可能である。このカムリンクがウェッジプレートを遠位方向に移動させる。
【0014】
本開示の別の側面によれば、上述の部材は可撓性脚である。
【0015】
本開示の別の側面によれば、本装置は、駆動エッジを伴うカムスロットを有している。上述のカムリンクがこの駆動エッジと係合する。カムリンクは、ウェッジプレートを長手方向遠位側に移動させるように構成されている。
【0016】
本開示の別の側面によれば、アクチュエータが遠位方向に駆動されるときに、カムリンクが遠位側に駆動される。カムリンクは、カムスロットの駆動エッジと係合する。カムリンクは、ウェッジプレートを長手方向に動かし、丸みを帯びたその遠位端部を第一および第二のジョー部材の間に移動させる。上述の部材は、装填するため、第一の近位窓と係合し、ウェッジプレートを第一および第二のジョーの間に保持する。
【0017】
本開示の別の側面によれば、カムリンクがさらに遠位側に駆動されると、カムリンクは駆動エッジを解放し、カムスロット内を横行する。このカムリンクにより、ウェッジプレートは丸みを帯びた遠位端部を第一および第二のジョー部材の間から近位方向に移動させることが可能に成されている。上述の部材は、第二の近位窓と係合し、ウェッジプレートを最も近位側の位置に保持する。
【0018】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置は、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、およびその本体の内部に配置された複数の外科用クリップを有している。また、本装置は、上述の本体の遠位端部に隣接して取り付けられたジョーアセンブリ、およびそのジョーアセンブリへ向けて外科用クリップを遠位方向に個別的に進行させることができるように構成されたクリッププッシャーも有している。さらに、本装置は、少なくとも部分的に本体の内部に配置され、且つ、カウンター機構を伴うハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも含んでいる。このカウンター機構はハンドル部分と関わり合っており、また、このカウンター機構は、ハンドル部分の作動に対応して指標を与える。
【0019】
本開示の別の側面によれば、上述のカウンター機構は液晶ディスプレイを含んでいる。
【0020】
本開示の別の側面によれば、上述のカウンター機構はバックライトを含んでいる。
【0021】
本開示の別の側面によれば、上述のカウンター機構は、ハンドル部分の完全作動時に指標が与えられる。
【0022】
本開示の別の側面によれば、本装置は、上述のアクチュエータにより始動されるカウンター機構を有している。
【0023】
本開示の別の側面によれば、上述のカウンター機構はハンドル内にあり、前述のアクチュエータに接続されている。このカウンター機構は、前述のアクチュエータに接続される部材を有している。また、このカウンター機構は、ディスプレイ接触子を備えた液晶ディスプレイを有している。このディスプレイ接触子は、上述の部材がディスプレイ接触子と接触したときに活動化される。
【0024】
本開示の別の側面によれば、上述の部材は回転可能である。この部材は、ディスプレイ接触子と接触すべく、アクチュエータの長手方向の動きに対応して回転する。
【0025】
本開示の別の側面によれば、上述のカウンター機構は、レンズを有する液晶ディスプレイである。この液晶ディスプレイは画像を表示する。前述のレンズは、この画像を拡大する。
【0026】
本開示の別の側面によれば、上述のアクチュエータは開口を含んでいる。上述の部材を伴うカウンター機構は、第一アームおよび第二アームを有している。この第一アームは前述の開口に接続されている。前述のアクチュエータが長手方向遠位側に移動すると、そのアクチュエータは第一のアームを偏向させ、上述の部材がその動きに対応して回転する。第二のアームは、前述の部材の回転に対応してディスプレイ接触子と接触する。このディスプレイ接触子は、前述の第二アームがディスプレイ接触子と接触したときに活動化される。
【0027】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための措置が提供される。この装置は、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリを有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、それらのジョー部分が離間配置位置にあるときに外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャー、および少なくとも部分的に本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも有している。さらに、本装置は、上述の第一および第二のジョー部分に隣接して配置され、且つ、それらのジョー部分を前述の近接配置位置へ移動させることができるジョー閉鎖部材、および、複数のクリップが実質的に使い果たされているときに外科用クリップの組織への適用を防止すべく、上述のクリッププッシャーと係合することができるように構成されたロックアウト機構も有している。
【0028】
本開示の別の側面によれば、上述のロックアウト機構はある部材を有している。その部材は、アクチュエータと共に最も遠位側の位置まで長手方向に移動可能である。この部材は上述の最も遠位側の位置へ到達し、且つ、この部材が前述のクリッププッシャーと係合する。この部材により、クリッププッシャーは外科用クリップをジョーアセンブリへ向けて遠位方向に進行させることが防止される。
【0029】
本開示の別の側面によれば、本装置は、さらに、クリップフォロワーを含んでいる。このクリップフォロワーは、本体内に配置されたクリップを遠位方向に付勢する。前述のロックアウト機構はある部材を含んでいる。その部材は、アクチュエータと共に最も遠位側の位置まで長手方向に移動可能である。この部材は上述の最も遠位側の位置に到達し、且つ、この部材が前述のフォロワーと係合する。この部材により、フォロワーは近位方向に引っ込められることが防止される。クリッププッシャーが引っ込められると、クリッププッシャーは上述のフォロワーと係合する。この部材により、クリッププッシャーは外科用クリップをジョーアセンブリへ向けて遠位方向に進行させることが防止される。
【0030】
本開示の別の側面によれば、上述の部材はロックアウトウェッジである。
【0031】
本開示の別の側面によれば、上述の部材は、少なくとも一つの部材角度形成面を有している。上述のアクチュエータは、少なくとも一つのアクチュエータ角度形成面を有している。アクチュエータが近位方向に引っ込められると、前述の少なくとも一つのアクチュエータ角度形成面が上述の部材角度形成面と係合する。この係合は、アクチュエータが近位側の位置から最も近位側の位置へ引っ込められるのを防止する。
【0032】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置は、ハンドル部分、およびそのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体を有している。また、本装置は、上述の本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリも有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。さらに、本装置は、それらのジョー部分が離間配置位置にあるときに、外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャーも有している。本装置は、さらに、少なくとも部分的に上述の本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータを有している。また、本装置は、それらのジョー部分を近接配置位置へ移動させることができるように上述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材、ならびに前述のアクチュエータに接続されている複数のラチェット歯を備えたラックも有している。さらに、本装置は、前述のラチェット歯と係合することができるように構成された、少なくとも一つの歯を備えた歯止めも有している。この歯止めは、ハンドル部分内において付勢されている。アクチュエータが長手方向に動かされると、前述のラチェット歯は上述の歯止め上を通過する。この歯止めは、本装置の完全作動前にアクチュエータが偶発的に戻ってしまうのを防ぐことができるように構成されている。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレートも有している。
【0033】
本開示の別の側面によれば、上述の歯止めは、歯止めばねにより付勢されている。この歯止めばねは、歯止めを前述のラックと係合する状態に付勢している。
【0034】
本開示の別の側面によれば、本装置は、さらに、ハンドル部分の内側に接続されている第一および第二の支柱を含んでいる。これらの第一および第二の支柱は、上述の歯止めばねを支えることができるように構成されている。
【0035】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置も、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリを有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、それらのジョー部分が離間配置位置にあるときに、外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャー、および少なくとも部分的に上述の本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも有している。本装置は、さらに、それらのジョー部分を近接配置位置へ移動させることができるように前述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材を有している。上述の本体部分はある外径を有している。また、上述のジョーアセンブリは、離間配置位置において、ある幅を有している。この幅は、前述の本体の外径よりも小さく、またはその外径に等しい。
【0036】
本開示の別の側面によれば、本装置は、ある長さを持った本体を有している。その長さは、肥満症治療手術における使用を促進するのに適した長さである。本開示の別の側面によれば、肥満症治療手術における使用を促進するのに適した長さを有する本装置は、30センチメートルより大きい長さを有している。
本発明は、例えば以下の項目を提供する。
(項目1)
身体組織へ外科用クリップを取り付けるための装置であって、当該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
f)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
g)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;および
h)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
を含む、外科用クリップ取付器。
(項目2)
前記ウェッジプレートは、該ウェッジプレートが前記第一および第二のジョー部分の間で長手方向に移動されるときに、該第一および第二のジョー部分を付勢し;そして
前記ウェッジプレートは、該クリップの装填中、該第一および第二のジョー部分を予め定められた一定の関係に維持し、ここで、該予め定められた一定の関係が、クリップの装填中に生じる該第一および第二のジョー部材の屈曲を防いでいる;
項目1記載の装置。
(項目3)
前記ウェッジプレートが丸みを帯びた遠位先端部を有している、項目2記載の装置。
(項目4)
前記ウェッジプレートが第一の近位窓を有しており、該第一の近位窓は、最も遠位側の位置において該ウェッジプレートを保持することができるように構成されている前記本体の内部に配置されたある部材により係合されるべく成されており、該最も遠位側の位置が該第一および第二のジョー部材の間である、項目2記載の装置。
(項目5)
前記ウェッジプレートが第二の近位窓を有しており、該第二の近位窓は前記部材により係合されるべく成されており、該第二の近位窓は、該ウェッジプレートを最も近位側の位置において保持することができるように構成されており、該最も近位側の位置は前記第一および第二のジョー部材の後ろ側であり、該ウェッジプレートの該最も近位側の位置は、前記第一および第二のジョー部材が該クリップを圧縮することができるように構成されている、項目4記載の装置。
(項目6)
前記部材は、該アクチュエータにより該第二の近位窓から第一の近位窓へ移動可能であり、該アクチュエータは前記ウェッジプレートを遠位方向に移動させ、ここで、前記部材は、該ウェッジプレートが遠位方向に移動するときに、前記第二の近位窓から前記第一の近位窓へ移動する、項目5記載の装置。
(項目7)
前記アクチュエータがさらにカムリンクを含み、該カムリンクは該ウェッジプレートに設けられたカムスロットと係合可能であり、該カムリンクが該ウェッジプレートを遠位方向に移動させるためのものである、項目1記載の装置。
(項目8)
前記部材が可撓性脚である、項目6記載の装置。
(項目9)
前記カムスロットが駆動エッジを有しており、前記カムリンクが該駆動エッジと係合し、該カムリンクが該ウェッジプレートを遠位方向に向けて長手方向に移動させることができるように構成されている、項目7記載の装置。
(項目10)
前記アクチュエータが遠位方向に駆動されるときに、前記カムリンクが遠位方向に駆動され、該カムリンクが前記カムスロットの該駆動エッジと係合し、該カムリンクは、前記第一および第二のジョー部材の間に該丸みを帯びた遠位端部を移動させるべく、前記ウェッジプレートを長手方向に移動させ、ここで、前記部材が、装填のため、該ウェッジプレートを前記第一および第二のジョーの間に保持すべく、該第一の近位窓と係合する、項目9記載の装置。
(項目11)
前記カムリンクがさらに遠位方向に駆動されるときに、該カムリンクが前記駆動エッジを解放して前記カムスロット内を横断し、該カムリンクは、前記ウェッジプレートが該丸みを帯びた遠位端部を前記第一および第二のジョー部材の間から近位方向に移動させるのを可能に成し;
ここで、前記部材が、該ウェッジプレートを該最も近位側の位置に保持すべく、前記第二の近位窓と係合する;
項目10記載の装置。
(項目12)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリ;
e)外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記ハンドル部分と連合したカウンター機構であって、該ハンドル部分の作動に対応して指標を与えるカウンター機構;
を含む、外科用クリップ取付器。
(項目13)
前記カウンター機構が液晶ディスプレイを含む、項目12記載の装置。
(項目14)
前記カウンター機構がバックライトを含む、項目12記載の装置。
(項目15)
前記カウンター機構は、該ハンドル部分の完全作動時に指標が与えられる、項目12記載の装置。
(項目16)
前記カウンター機構が該アクチュエータによりトリガーされる、項目12記載の装置。
(項目17)
前記カウンター機構は該ハンドル内にあって該アクチュエータに接続されており、該カウンター機構は該アクチュエータに接続されたある部材を有しており、ここで、該カウンター機構はディスプレイ接触子を備えた液晶ディスプレイを有しており、該ディスプレイ接触子は、前記部材が該ディスプレイ接触子と接触したときに作動される、項目16記載の装置。
(項目18)
前記部材が回転可能であり、該部材が、前記ディスプレイ接触子と接触させるべく、該アクチュエータの長手方向の動きに対応して回転する、項目17記載の装置。
(項目19)
前記カウンター機構がレンズを有する液晶ディスプレイであり、該液晶ディスプレイはある画像を表示し、該レンズが該画像を拡大する、項目12記載の装置。
(項目20)
前記アクチュエータが開口を含み、前記カウンター機構が第一アームおよび第二アームを伴う前記部材を有しており、該第一アームは該開口に接続されており;
ここで、該アクチュエータが遠位方向に向けて長手方向に移動したときに、該アクチュエータは該第一アームを偏向させ、前記部材が該動きに対応して回転し;そして
前記第二アームは該部材の該回転に対応して前記ディスプレイ接触子と接触し、該ディスプレイ接触子は、前記第二アームが該ディスプレイ接触子と接触したときに作動される;
項目17記載の装置。
(項目21)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;および
h)前記複数のクリップが実質的に使い果たされたときに、組織への該外科用クリップの適用を防止すべく、前記クリッププッシャーと係合することができるように構成されているロックアウト機構;
を含む、外科用クリップ取付器。
(項目22)
前記ロックアウト機構がある部材を有しており、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり、ここで、該部材が該最も遠位側の位置に達したときに、該部材は前記クリッププッシャーと係合し、該部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている、項目21記載の装置。
(項目23)
さらに、クリップフォロワーを含み、該クリップフォロワーは、前記本体の内部に配置された該複数のクリップを遠位方向に付勢しており;
ここで、前記ロックアウト機構はある部材を含んでおり、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり;
前記部材が該最も遠位側の位置に達したときに、該部材は前記フォロワーと係合し、該部材により、該フォロワーが近位方向に後退することが防止されており;
該クリッププッシャーが後退すると、該クリッププッシャーは前記フォロワーと係合し、ここで、前記部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている;
項目21記載の装置。
(項目24)
前記部材がロックアウトウェッジである、項目22記載の装置。
(項目25)
前記部材がロックアウトウェッジである、項目23記載の装置。
(項目26)
前記部材が少なくとも一つの部材角度形成面を有しており、また、前記アクチュエータが少なくとも一つのアクチュエータ角度形成面を有しており、ここで、該アクチュエータが近位方向に後退すると、該少なくとも一つのアクチュエータ角度形成面が該部材角度形成面と係合し、該係合により、該アクチュエータが最も近位側の位置の近位側に後退することが防止されている、項目23記載の装置。
(項目27)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
h)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
i)前記アクチュエータに結合されている複数のラチェット歯を有するラック;および
j)前記ラチェット歯と係合することができるように構成されている少なくとも一つの歯を有する歯止めであって、該歯止めは前記ハンドル部分内において付勢されており、ここで、該アクチュエータが長手方向に移動されると、前記複数のラチェット歯は該歯止め上を通り越し、該歯止めは、当該装置が完全作動する前に生じる該アクチュエータの不慮の戻りを防止することができるように構成されている、歯止め;
を含む、外科用クリップ取付器。
(項目28)
前記歯止めが歯止めばねにより付勢されており、ここで、該歯止めばねが歯止めを前記ラックとの係合に向けて付勢している、項目27記載の装置。
(項目29)
さらに、前記ハンドル部分の内側に接続された第一および第二の支柱を含んでおり、該第一および第二の支柱が前記歯止めばねを支持することができるように構成されている、項目28記載の装置。
(項目30)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)該ジョー部分を前記近接配置位置へ移動させるため、前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、ここで、該本体部分がある外径を有しており、また、前記ジョーアセンブリは該離間配置位置においてある幅を有しており;ここで、該幅が該本体の該外径未満であるか、該外径に等しい、ジョー閉鎖部材;
を含む、外科用クリップ取付器。
(項目31)
前記本体がある長さを有しており、該長さが肥満症治療手術における使用を容易化するのに適した長さである、項目30記載の装置。
(項目32)
前記長さが30センチメートルより長い、項目31記載の装置。
【図面の簡単な説明】
【0037】
外科用クリップ取付器の特定の実施態様が、添付図面を参照しながらここで開示されている。
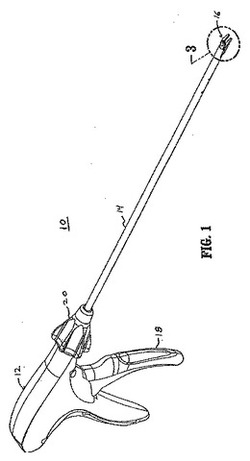
【図1】図1は外科用クリップ取付器の透視図である。
【図2】図2は、図1に示されている外科用クリップ取付器の別の透視図である。
【図3】図3は、その外科用クリップ取付器におけるジョー構造の拡大された透視図である。
【図4】図4は、その外科用クリップ取付器の上面図である。
【図5】図5は、その外科用クリップ取付器の側面図である。
【図6】図6は、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの側面図である。
【図6A】図6Aおよび6Bは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図6B】図6Aおよび6Bは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図6C】図6Cは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの側面図である。
【図6D】図6Dは、本体の半分が取り除かれた状態において、反対側から見たときの、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図7】図7は、シャフトアセンブリを伴う、そのクリップ取付器におけるハンドルの分解透視図である。
【図7A】図7Aは、駆動リンクおよびスピンドル接続の透視図である。
【図7B】図7Bは、ノブ、ブッシングおよび保持ピンの断面図である。
【図7C】図7Cは、そのノブの透視図である。
【図7D】図7Dは、その外管における近位端部の透視図である。
【図7E】図7Eは、ブッシングと共に組み立てられたその外管における近位端部の透視図である。
【図8】図8は歯止めの透視図である。
【図9】図9はラックの透視図である。
【図9A】図9Aは、そのラックの別の透視図である。
【図9B】図9Bおよび9Cはアクチュエータプレートの反対側の透視図である。
【図9C】図9Bおよび9Cはアクチュエータプレートの反対側の透視図である。
【図9D】図9Dおよび9Eはトグルアームの反対側の透視図である。
【図9E】図9Dおよび9Eはトグルアームの反対側の透視図である。
【図9F】図9Fおよび9Gはウィッシュボーン型リンクの反対側の透視図である。
【図9G】図9Fおよび9Gはウィッシュボーン型リンクの反対側の透視図である。
【図10】図10は、本外科用クリップ取付器におけるシャフトアセンブリの分解透視図である。
【図10A】図10Aはフィードバーの透視図である。
【図10B】図10Bは、フォロワーおよび外科用クリップの透視図である。
【図10C】図10Cおよび10Dはトリップブロックの反対側の透視図である。
【図10D】図10Cおよび10Dはトリップブロックの反対側の透視図である。
【図10E】図10Eはスピンドルの透視図である。
【図10F】図10Fは、図10Eの細部の拡大図である。
【図10G】図10Gは、図10Eの細部の拡大図である。
【図10H】図10Hは、フォロワーの下側の突き合わせ(abutmet)面を描いた、フォロワーの透視図である。
【図11】図11は、スピンドルの遠位端部およびドライバーの透視図である。
【図12】図12は、そのスピンドルおよびロックアウトウェッジのトリップレバー機構の透視図である。
【図13】図13は、ウェッジプレートおよび付勢ばねの透視図である。
【図14】図14および15は、フィラーコンポーネントの反対側の透視図である。
【図15】図14および15は、フィラーコンポーネントの反対側の透視図である。
【図16】図16は、回転ノブおよびシャフトアセンブリの透視図である。
【図17】図17は過圧アセンブリの透視図である。
【図18】図18は、スピンドルおよびジョーアセンブリの透視図である。
【図19】図19は、図18におけるスピンドルおよびジョーアセンブリの細部の拡大図である。
【図20】図20は、図18におけるスピンドルおよびトリップレバーの細部の拡大図である。
【図21】図21は、外管が取り除かれた状態における本外科用クリップ取付器の遠位端部の拡大図である。
【図22】図22は、パーツが取り除かれた状態における本外科用クリップ取付器のシャフトアセンブリの透視図である。
【図23】図23は、図22の細部の拡大図である。
【図24】図24は、図22の細部の拡大図である。
【図25】図25は、図22の細部の拡大図である。
【図26】図26は、スピンドル、ドライバーおよびジョーアセンブリの透視図である。
【図27】図27は、図26の細部の拡大図である。
【図28】図28は、カムリンクおよびウェッジプレートアセンブリの透視図である。
【図29】図29は、図28の細部の拡大図である。
【図30】図30は、図29の細部の拡大図である。
【図31】図31は、フィラーコンポーネントおよびジョーアセンブリの透視図である。
【図32】図32は、図31に示されているジョーアセンブリの拡大された透視図である。
【図33】図33および34は、ウェッジプレートおよびドライバーを含む、スピンドルの遠位端部の透視図である。
【図34】図33および34は、ウェッジプレートおよびドライバーを含む、スピンドルの遠位端部の透視図である。
【図35】図35は、部分的に断面で示されている、ファイヤリングする前の状態における本外科用クリップ取付器の側面図である。
【図36】図36は、図35の細部の拡大図である。
【図37】図37は、図35の細部の拡大図である。
【図38】図38は、トリップレバーを示す、図37の細部の拡大図である。
【図39】図39は、フォロワーを示す、図37の細部の拡大図である。
【図40】図40は、図37の細部の拡大図である。
【図41】図41は、図40の細部の拡大図である。
【図42】図42は、断面で示されている、図37における本外科用クリップ取付器の遠位端部の側面図である。
【図42A】図42Aは、断面で示されている、あるチャンネル上でのフィードバックプッシャーおよびランスの側面図である。
【図43】図43は、ウェッジプレートおよびジョーアセンブリの透視図である。
【図44】図44は、ウェッジプレートおよびジョー部材を示す、図43の細部の拡大図である。
【図45】図45は、線45−45に沿って取った、図43の上面図である。
【図46】図46は、ジョーおよびウェッジプレートを示す、図45の細部の拡大図である。
【図47】図47は、ウェッジプレートおよびカムリンクを示す、図45の細部の拡大図である。
【図48】図48は、断面で示されている、初期ストロークの開始時におけるハンドルハウジングの側面図である。
【図49】図49は、ラックおよび歯止めを示す、図48の細部の拡大図である。
【図50】図50は、図49と同様な、図48の細部の拡大図である。
【図51】図51は、断面で示されている、フィードバーおよびトリップレバーの側面図である。
【図52】図52は、断面で示されている、フォロワーの側面図である。
【図53】図53は、断面で示されている、本外科用クリップ取付器の内視鏡部分の側面図である。
【図54】図54は、スピンドルの動きを描いた、図53の細部の拡大図である。
【図55】図55は、カムリンクの動きを描いた、ウェッジプレートおよびフィラーコンポーネントの上面図である。
【図56】図56は、断面で示されている、クリップを進行させるフィードバーの動きを描いた側面図である。
【図57】図57は、遠位方向に動くウェッジプレートおよびカムリンクの上面図である。
【図58】図58は、断面で示されている、ウェッジプレート窓から外れてカム作動された(cammed)可撓性脚の動きを示す側面図である。
【図59】図59は、ジョーに入るクリップを描いた側面図である。
【図60】図60は、カムリンクおよびウェッジプレートの動きを示す更なる上面図である。
【図61】図61は、断面で示されている、可撓性脚およびウェッジプレートの離脱の様子を描いた側面図である。
【図62】図62は、ジョー構造に入るウェッジプレートの上面図である。
【図63】図63は、ジョー構造をカム作動により開いた(camming open)ウェッジプレートを示す透視図である。
【図64】図64は、ウェッジプレート内におけるカムリンクの更なる進行を描いた上面図である。
【図65】図65は、断面で示されている、フィードバーと係合したトリップレバーを描いた側面図である。
【図66】図66は、断面で示されている、可撓性脚をウェッジプレートとの係合から外れてカム作動するスピンドルを描いた側面図である。
【図67】図67は、断面で示されている、クリップをジョー構造内に装填するフィードバーを描いた側面図である。
【図68】図68は、断面で示されている、トリップブロックによるフィードバーとの係合から外れてカム作動されているトリップレバーを描いた側面図である。
【図69】図69は、断面で示されている、ウェッジプレートおよびフィードバーの引き込みを描いた側面図である。
【図69A】図69Aは、本体の半分が取り除かれた状態の、初期作動を描いた透視図である。
【図70】図70は、断面で示されている、スピンドルの更なる進行を描いた側面図である。
【図71】図71は、断面で示されている、ウェッジプレートの引き込みおよびスピンドルの更なる進行を描いた側面図である。
【図72】図72は、ジョー構造から後退するウェッジプレートの透視図である。
【図73】図73は、断面で示されている、ドライバーと係合するスピンドルおよびスピンドルと係合するラッチリトラクターを描いた側面図である。
【図74】図74は、トリガーがフルストローク状態にあるハンドルハウジングの側面図である。
【図75】図75は、歯止めがラックの歯を通過した状態の、図74の細部の拡大図である。
【図76】図76は、断面で示されている、外科用クリップの周りで閉じたジョーをカム作動するドライバーの側面図である。
【図77】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図78】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図79】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図80】図80は、断面で示されている、衝撃ばねを含む過圧機構の図である。
【図81】図81は、脈管上に形成された外科用クリップの透視図である。
【図82】図82は、歯止めをリセットする様子の細部の拡大図である。
【図83】図83は、断面で示されている、ラッチリトラクターをリセットする様子を描いた側面図である。
【図84】図84は、断面で示されている、スピンドルを後退させる様子を描いた側面図である。そして
【図85】図85および86は、ウェッジプレート内におけるカムリンクのリセットを描いた上面図である。
【図86】図85および86は、ウェッジプレート内におけるカムリンクのリセットを描いた上面図である。
【図87】図87は、フォロワーがランスと係合する様子を描いた、本外科用クリップ取付器における遠位端部の側面図である。
【図88】図88は、部分的に断面で示した、ロックアウトウェッジがスピンドルと係合する様子の側面図である。
【図89】図89は、ロックアウト状態にある歯止めおよびラックの拡大図である。
【発明を実施するための形態】
【0038】
(詳細な説明)
外科用クリップの挿入中に外科用クリップ取付器のジョーを離間した安定な位置に保持することができるように構成されたジョー制御機構を有する、新規な内視鏡用の外科用クリップ取付器が提供される。ここで開示されているジョー制御機構は内視鏡用の外科用クリップ取付器において示され、説明されているが、その開示されているジョー制御機構は、あらゆる外科用クリップ取付器または一対の圧縮可能なジョーを有する他の器械にも適用可能であることを認識すべきである。
次に、図1−5を参照しながら説明すると、外科用クリップ取付器10は、一般的に、ハンドルアセンブリ12、およびハンドルアセンブリ12から遠位方向に延びた細長い管状部材14を含む内視鏡部分を含んでいる。ハンドルアセンブリ12はプラスチック材料から形成されており、一方、細長い管状部材14は生体適合性材料、例えばステンレス鋼などから形成されている。外科用クリップ取付器10の細長い管状部材14は使用目的に依存して様々な外径を有していてよく、例えばその外径は5mまたは10mmなどであってよい。さらに、細長い管状部材は、例えば肥満症治療手術などにおける使用目的に依存して、様々な細長い長さまたは短縮された長さを有していてよい。一つの実施態様においては、肥満症治療手術における細長い管状部材14は30センチメートルを超える長さを有していてよい。肥満症治療手術の一つの好適な実施態様においては、細長い管状部材14の長さは33センチメートルである。別の好適な実施態様においては、肥満症治療手術用の細長い管状部材14の長さは37センチメートルである。さらに別の好適な実施態様においては、肥満症治療手術用の細長い管状部材14の長さは40センチメートルであるが、当業者であれば、この外側の管状部材14は30センチメートルを超えるあらゆる長さを有していてよく、また、この開示が上のどの実施態様にも限定されるものではないことを認識するであろう。一対のジョー16が細長い管状部材14の遠位端部に取り付けられており、これらのジョーは、ハンドルアセンブリ12に可動的に取り付けられたトリガー18により作動される。ジョー16も、ステンレス鋼またはチタンなどの生体適合性材料で形成されている。注目すべきことに、幾つかの実施態様においては、ジョー16が相互関係において開いた状態にあるとき、それらのジョー16の最大幅は、開いた状態で本体のトロカールまたは他の部分を通じて挿入することができるように、細長い管状部材14の外径未満であるか、またはその外径に等しい。これは、特に、10mmのクリップ取付器の場合に当てはまる。ジョー16は、それらのジョーが細長い管状部材14に対して相対的に長手方向に関して同じ状態を保つような仕方で取り付けられている。ノブ20は、ハンドルアセンブリ12の遠位端部に回転可能に取り付けられており、長手方向軸の周りで細長い管状部材14およびジョー16を360度回転させることができるように細長い管状部材14に固定されている。差し当たり図3を参照しながら説明すると、ジョー16は、そこに外科用クリップを受け入れるためのチャンネル22を定めている。
【0039】
図2および4において最も分かりやすく示されているように、インジケーター、例えばハンドルアセンブリ12と連合されたカウンター機構などを見ることができるようにするため、ハンドルアセンブリ12には窓200が設けられている。
【0040】
次に、図6から7までを参照すると、クリップ取付器10のハンドルアセンブリ12が示されている。ハンドルアセンブリ12は長手方向に移動可能なラック202を含んでおり、このラックはウィッシュボーン型リンク204によりトリガー18に結合されている。ウィッシュボーン型リンク204をラック202に結合するため、ピン206が設けられている。ラック202は、トリガー18の作動に対応して外科用クリップを進行させ、ジョー16の間に外科用クリップを圧搾するために設けられている。ラック202は、ラック202とハウジング12内のジャーナル36内に取り付けられたブッシング210との間に位置付けられた戻しばね208により、近位側の位置へ付勢されている。
【0041】
外科用器械10の完全作動前にトリガー18およびラック202が偶発的に戻ってしまうのを防ぐため、歯止めピン214に歯止め212が可動的に取り付けられている。歯止め212は、以降の箇所においてもっと詳細に検討されている仕方でラック202と係合可能である。歯止め212をラック202との係合に向けて付勢させるため、歯止めばね216が二つのばね支柱218の間に設けられている。
【0042】
差し当たり図8を参照しながら説明すると、歯止め212は、歯止め212を歯止めピン214に取り付けるための歯止め穴220を含んでいる。また、歯止め212は、以下で説明されている仕方でラック202と係合可能な歯止め歯222も含んでいる。
【0043】
図7、9および9Aを参照しながら説明すると、ラック202は、一般的に、ラック202をピン206によりウィッシュボーン型リンク204に接続するためのラック穴224を含んでいる。また、ラック202はラック歯226も含んでおり、これらのラック歯は、歯止め歯222と係合可能であり、ハンドルアセンブリ12内におけるラック202の長手方向の動きを制限することができる。さらに、ラック202には、遠位凹部228および近位凹部230も設けられている。凹部228および230は、ラック202が近位方向の動きに逆転するときに、歯止め212が逆転し、ラック202上を後ろ向きに進むことができるようにするために設けられている。ラック202を以降の箇所において説明されている仕方で様々な駆動機構と係合させるため、ラック202には遠位フック232が設けられている。従って、トリガー18の作動は、ウィッシュボーン型リンク204を駆動させ、これにより、戻しばね208の付勢に抗じて、ウィッシュボーン型リンク204を通じてラック202を遠位方向に駆動する。
【0044】
差し当たり図9Fおよび9Gを参照しながら説明すると、ウィッシュボーン型リンク204は、上で記されているように、トリガー18をラック202に接続するために設けられている。詳細には、ウィッシュボーン型リンク204は、トリガー18に設けられている支柱(図示せず)と係合可能なスナップ嵌め式の端部またはロッキング機構部234を含んでいる。ウィッシュボーン型リンク204の反対側の端部に形成されたボア236は、ラックピン206に取り付けるために設けられている。ウィッシュボーン型リンク204に設けられたスロット238は、ウィッシュボーン型リンク204がその反対側からラック202を支持することを可能に成している。トリガー18およびウィッシュボーン型リンク204を含むリンケージ機構は、そのリンケージ機構がハンドルアセンブリ12内において占有するスペースを最小化しながら、より大きな機械的利点を可能に成している。ノブ20は、同じくハウジング12内のジャーナル36内に回転可能に取り付けられたフランジ34を含んでいる。
【0045】
次に、図6Aおよび6Bを参照しながら説明すると、上で記されているように、ハンドルアセンブリ12には、その近位端部に、ハンドルアセンブリ12と連合したインジケーター機構を見えるようにするための窓200が設けられている。これにより、ファイヤリングされたクリップの個数または外科用器械10内に残っているクリップの個数のいずれかに関する指示を与えることができるように構成された新規なカウンター機構240が提供される。カウンター機構240は、ハンドルアセンブリ12に枢動可能に取り付けられたトグルアーム244を介してハンドルアセンブリ12と連合されているアクチュエータ242により始動される。カウンター機構240は、一般的に、トリガー18の作動に対応してトグルアーム244により始動または作動される、例えば板ばねおよび接触子、ボタンなどの作動機構部248を有するカウンター246を含んでいる。カウンター246を保護するため、または運転中の英数字デジット(alpha−numeric digits)の倍率を高めるため、カウンター246とカウンター窓200との間にレンズ250が設けられている。カウンター246は、液晶ディスプレイ(LCD)、発光ダイオード(LED)またはアナログ/機械式のカウンターであってよい。また、カウンター246は、プリント回路基板、バッテリーおよびバックライトまたは照明付きの(lighted)ディスプレイも含んでいてよい。カウンター246は、残っているクリップの個数を指示するため、外科用器械10に当初与えられた外科用クリップの合計数からカウントダウンするように構成することができる。代替的に、カウンター246は、0から既にファイヤリングされたクリップの合計数までをカウントアップすることもできる。一つの想定されているカウンター246は、Golden View Display,Inc.から入手可能なLCDカウンターモジュールである。カウンター246は、ある事象の指示をもたらすことができる、当技術分野において既知のあらゆる装置であってよい。その事象は、本クリップ取付器10の使用手順または操作に関連したものであってよい。一つの好適な実施態様においては、カウンター246は様々なタイプの液晶ディスプレイであってよい。しかし、別の実施態様においては、そのディスプレイは、一つもしくはそれ以上の発光ダイオード、ルミネッセントディスプレイ、多色ディスプレイ、デジタルディスプレイ、アナログディスプレイ、受動ディスプレイ、能動ディスプレイ、いわゆる「ツイステッドネマチック」ディスプレイ、いわゆる「スーパーツイステッドネマチック」ディスプレイ、「デュアルスキャン」ディスプレイ、反射ディスプレイ、バックライトディスプレイ、英数字ディスプレイ、モノクロディスプレイ、いわゆる「Low Temperature Polyslicon Thin Film Transistor」もしくはLPTS TFTディスプレイ、またはその手順もしくはクリップ取付器10に関するパラメーター、情報もしくはグラフィックスを指示するあらゆる他のディスプレイであってよい。一つの実施態様においては、そのディスプレイは液晶ディスプレイまたは「LCD」である。前述のLCDは、外科医師に対して本クリップ取付器10に関する一つもしくはそれ以上の運転パラメーターを表示する白黒ディスプレイまたはカラーディスプレイであってよい。一つの実施態様においては、表示されるパラメーターは、残っているクリップの量、使用されたクリップの個数、位置パラメーター、手術経過時間(surgery time of usage)、またはその手技に関するあらゆる他のパラメーターであってよい。
【0046】
次に、差し当たり図9Bおよび9Cを参照し、アクチュエータ242の具体的な構造について説明する。上で記されているように、アクチュエータ242はトリガー18の動きに対応してカウンター機構240に指標を与えることができるように構成されており、従って、アクチュエータ242は、ラック202およびウィッシュボーン型リンク204を通じて延びるピン206の周りに位置付けされるべく構成されている駆動スロット252を含んでいる。駆動スロット252は、ピン206がアクチュエータ242と係合する前に、外科用器械10が予め定められたストローク長さを通じて作動させられることを可能に成している。トグルアーム244をカウンター246に向けて付勢するため、対応するピンをトグルアーム244に係合させるべく、接続用スロット254が設けられている。ハンドルアセンブリ12内におけるアクチュエータの往復運動の間に生じるアクチュエータ242のあらゆる屈曲または揺動を防ぐため、アクチュエータ242は、ハンドルアセンブリ12に形成されたハウジングレール258に沿って乗ることができるように構成されている一対のフィンガー256を備えている(図6B)。アクチュエータ242には、以降の箇所においてもっと詳しく説明されている仕方で戻しばねと係合することができるように、タブ260(図6Cおよび6D)が設けられている。
【0047】
差し当たり図9Dおよび9Eを参照しながら説明すると、カウンターレバー244は、ハウジングアセンブリ12内へ枢動可能に取り付けられている支柱262を含んでいる。トグルアーム244の第一端部はピン264を含んでおり、このピンは、ハウジングアセンブリ12内におけるアクチュエータ242の長手方向の動きがカウンターレバー244をスタッド262の回りで枢動させるような仕方で、アクチュエータ242の接続用スロット254内に係合可能である。トグルアーム244の反対側の端部は接触レバー268を含んでおり、この接触レバーは、カウンター246に設けられているカウンターボタン248と係合して押し下げ、これにより、カウンター246を始動させることができるように、または数字的に上昇するか下降するかのいずれかの予め定められた様式の数だけカウンター246をインクリメントすることができるように構成されている。
【0048】
ハンドルアセンブリ内に取り付けられているカウンター機構240、アクチュエータ242およびカウンターレバー244の様々なコンポーネントの配列は、図6Bから6Dまでにおいて最も分かりやすく描かれている。最初に図6B(ここでは、明確にするため、ラック202が省かれている)を参照すると、アクチュエータ242のフィンガー256がハウジングアセンブリ12内に形成されたハウジングレール258に沿って乗っている様子を見ることができる。ウィッシュボーン型リンク204と連合したピン206が駆動スロット252内に乗っている。アクチュエータ242の近位端部では、カウンターレバー244のピン264が接続用スロット254内に位置付けられている。
【0049】
次に、図6Cおよび6Dを参照しながら説明すると、トリガー18の作動前にカウンターレバー244をカウンター機構240との係合から外れた状態に維持しておくため、アクチュエータ242のばね260と係合可能な圧縮ばね270が設けられている。圧縮ばね270の反対側の端部は、アクチュエータ242を最も近位側の方向に付勢するため、ハウジングハンドルアセンブリ12の反対側に形成された対応する突起部と係合している。
【0050】
次に、クリップ取付器10と関わり合いを有する様々なエレメントおよび機構の組み合わせについて説明する。
【0051】
図10を参照しながら説明すると、ブッシング210をノブ20に確保しておくため、保持ピン50を含むブッシング48が設けられている。駆動リンク272は、駆動リンク272の近位端部がラック202と係合するような仕方でラック202(図6および7)に結合されている。詳細には、ラック202の遠位フック232は、駆動リンク272の近位端部に設けられているスロット274と係合する。以降の箇所においてもっと詳しく説明されている仕方において、本器械の作動中、ジョー16の過剰な圧縮を防ぐため、衝撃ばね56を含む過圧機構がブッシング48の間の外管14の周りに設けられており、ノブ20のボア内に収容されている。駆動リンク272は、ノブ20のボア58内に延びている。
【0052】
細長い管状部材14の近位端部に配置されたフランジがブッシング48の近位端部に隣接している(図7Dおよび7E)。
【0053】
引き続き図10を参照しながら説明すると、様々なコンポーネントを作動させるため、細長い管状部材14を通じる長手方向の運動用に取り付けられた作動機構またはスピンドル60が設けられている。スピンドル60はその近位端部にボス62を含んでおり、このボスは、スピンドル60のボス62をスピンドルリンク272の凹部276内に位置付けることにより、スピンドルリンク272の遠位端部に設けられた凹部64と係合することができ(図7A)、スピンドル60は、スピンドルリンク272およびスピンドル60の長手方向の動きとは独立して、外管アセンブリと共に回転することができる。図7Bにおいて最も分かりやすく示されているように、ブッシング48は、ノブ20内に位置付けられ、保持ピン50によりそこに確保されている。
【0054】
差し当たり図7Cおよび7Eを参照しながら説明すると、ブッシング48は一対の対向する長手方向リブ278を備えており、これらのリブは、配向のため、ノブ20の対応するスロット280内に嵌合する。
【0055】
次に、図7Dおよび7Eを参照すると、ブッシング48の近位端部の内面に形成されたタブ282は外管14に設けられた対応する切り欠き部284と係合することができるように構成されているのが分かる。従って、外管14は、ノブ20の回転に対応して回転することができるように成されている。
【0056】
図10を参照すると、ドライバー66およびスライダージョイント68を含むカム作動機構が、外科用クリップの周りで閉じたジョー16をカム作動させるため、スピンドル60の遠位端部から延びている。
【0057】
クリップ取付器10は、組織に適用するための複数の外科用クリップを保持することができるように構成されている。クリップ取付器10は、複数の外科用クリップ72を保持し、且つ、それらの外科用クリップ72をジョー16へ運ぶことができるように構成された、細長いチャンネル部材70を含んでいる。このチャンネル部材70およびジョー16は細長い管状部材14に対して相対的に長手方向に移動しないことに留意すべきである。フォロワー74は、外科用クリップ72をチャンネル部材70内において遠位方向に駆り立てるべくばね76により付勢されている。チャンネルカバー78は、その内部にあるばね76および外科用クリップ72を保持し、且つ、誘導すべく、チャンネル70の上に被さっている。外科用クリップ72をジョー16内に差し向けるのを補助するため、チャンネルカバー78の遠位端部にはノーズ80が設けられている。
【0058】
フィードバー82を含むフィーダー機構は、個々のクリップ72をジョー16内へ進行させるため、チャンネルカバー78に対して相対的に長手方向の動きをもたらすことができるように設けられている。フィードバー82を近位方向に付勢させるため、ガイドピン86およびフィードバーばね88を有するトリップブロック84がチャンネルカバー78の近位端部に隣接して設けられている。詳細には、ガイドピン86の近位端部90は、トリップブロック84に設けられたスロット94を通じて(図10A、C&Dも参照のこと)、フィードバー82下側に設けられたフック92と相互に接続されている(図38A&B)。スピンドル60によりフィードバー82を動かすことができるようにするため、スピンドル60にはトリップレバー96および付勢ばね98が設けられている。トリップレバー96は、本明細書の以下の箇所においてもっと詳しく説明されている仕方でフィードバー82の近位端部と係合することができる。
【0059】
ここに開示されているクリップ取付器10の一つの顕著な利点は、外科用クリップ取付器10の作動中にジョー16内に進行させ、且つ、外科用クリップ72を受け入れながらジョー16を離間した状態に維持することができるように構成されたウェッジプレート100が設けられていることである。ウェッジプレート100を通じて形成された、以降の箇所においてもっと詳しく説明されている、カムスロット136(図13)と細長い管状部材14の内部に取り付けられたフィラーコンポーネント102は、ウェッジプレート100をフィラーコンポーネント102およびジョー16に対して相対的に移動させるべく、スピンドル60に設けられたカムリンク104と連携して協同する。フィラーコンポーネント102は、ジョー16のすぐ後ろ側に位置付けられており、細長い管状部材14に対して相対的に移動しない。
【0060】
図10Aに戻って説明すると、上で記されているように、外科用クリップ72をジョー16内に移動させるため、フィードバー82が設けられている。フィードバー82はスピンドル60に設けられているトリップレバー96により駆動される(図10参照)。詳細には、フィードバー82は細長い窓106を備えており、この窓は、スピンドル60が遠位方向に駆動されたときに、トリップレバー96により係合されるべく構成されている。また、フィードバー82、本明細書の以下の箇所で説明されている如きロックアウト構造を受け入れるための窓286も含んでいる。ジョー16内へのクリップの挿入を容易化するため、フィードバー82はその遠位端部にプッシャー108を備えており、このプッシャーは、クリップ72の列から外れた個々のクリップ72をジョー16内に進行させることができるように構成されている。図10Bに示されているように、フォロワー74は、外科用クリップ取付器10を通じてクリップ72を進行させるべく、クリップの列の後ろ側に位置付けられている。図10Hに示されているように、フォロワー74は、クリップチャンネル70の遠位端部に配置された更なるロックアウト構造と係合するための突き合わせ面288を含んでいる。
【0061】
図10Cを参照しながら説明すると、上で記されているように、トリップブロック84は、フィードバー82のフック92を受け入れるためのスロット94を含んでいる。トリップレバー96を窓106から解放し、従って、フィードバー82からトリップレバー96を解放するため、トリップブロック84は角度形成面110を備えており、図10Dにおいて最も分かりやすく示されているように、この角度形成面は、トリップレバー96と係合し、且つ、フィードバー82の窓106からそのトリップレバーを解放することができるように構成されている。
【0062】
次に、図10E−10Gを参照し、スピンドル60の様々な機構部について以下で説明する。他のコンポーネントから単離されたスピンドル60の透視図が図10Eに示されている。特に図10Fを参照しながら説明すると、近位端部において、スピンドル60は、その近位端部でトリップレバー96を取り付けるためのピボットポイント112を含んでいる。さらに、スピンドル60には、トリップレバー96をフィードバー82の窓106との係合に向けて付勢させることができる付勢ばね98を取り付けるためのボス114が設けられている。角度形成面290は、スピンドル60をロックアウト構造と係合させ、最後のクリップがファイヤリングされた後にスピンドルが完全に引っ込められてしまうのを防ぐために設けられている。図10Gを参照しながら説明すると、スピンドル60は、カムリンク104を取り付けるためのボス116を遠位端部に備えている。さらに、スピンドル60は隆起機構部118を備えており、この隆起機構部は、以降の箇所において説明されている仕方でフィラーコンポーネント102をウェッジプレート100から解放する機能を果たす。
【0063】
図11を参照しながら説明すると、スピンドル60は、外科用クリップがジョー16内に位置付けられた後に外科用クリップの周りでジョー16を閉じるべく、ドライバー66をジョー16との係合に向けて進行させるために設けられている。スライダージョイント68の遠位端部120は、ドライバー66に設けられた凹部122内に位置付けられている。スライダージョイント68の近位突起部124は、スピンドル60の遠位端部に設けられた長手方向スロット126内に乗っている。長手方向スロット126の長さは、スピンドル60が、ドライバー66と係合し、クリップ72の周りでジョー16を閉じるべくドライバー66を長手方向に移動させる前に、予め定められた長手方向距離だけ移動することができるように成している。ラッチリトラクター128がスライダージョイント68に設けられたスロット130内に一体的に形成されており、これにより、ウェッジプレート100が以降の箇所においてもっと詳しく説明されている仕方で近位方向に後退することが可能になった後に、ドライバー66を遠位方向に駆動させることが可能になる。
【0064】
図12を参照しながら説明すると、クリップ取付器10は、最後のクリップ72が送給された後のクリップ取付器10の作動を防止するための新規なロックアウト機構を備えている。クリップ取付器10は、スピンドル60に設けられたチャンネル294内に移動可能に取り付けられているロックアウトウェッジ292を含んでいる。ロックアウトウェッジ292は、スピンドル60に設けられた角度形成面290に対してカム作動することができるように構成された角度形成面296を含んでいる。隆起した突起部298は、フィードバーが長手方向に動いている間、ロックアウトウェッジ292をフィードバー82に固定するため、フィードバー82に設けられた窓286と結合する。
【0065】
次に、図13を参照し、ウェッジプレート100についてもっと詳しく説明する。上で記されているように、ウェッジプレート100は、ジョー16内への外科用クリップ72の装填中、ジョー16を離間状態に付勢し、且つ、ジョー16をその状態に維持するために設けられている。さらに、ウェッジプレート100の存在は、外科用クリップ72の装填中にジョーが屈曲するのを防ぐべく、ジョー16に安定性を提供する。図示されているように、ウェッジプレート100は遠位先端部134を含んでおり、この遠位先端部は、ジョー16と係合してジョー16をカム作動により開き、それらのジョーを離間状態に維持することができるように構成されている。さらに、ウェッジプレート100はカムスロット136を含んでおり、このカムスロットは、以下でもっと詳細に検討されているように、スピンドル60に取り付けられたカムリンク104と協同してウェッジプレート100の動きを制御することができるように構成されている。さらに、フィラーコンポーネント102の柔軟性を有する構造と係合させるべく、それぞれ、遠位および近位窓138および140が設けられている。ウェッジプレート100を細長い管状部材14内において一般的に近位方向に付勢するため、マウント144に付勢ばね142が設けられている。最後に、ストッパー146は、フィラーコンポーネント102に設けられた対応する構造と係合することができるように構成されている。
【0066】
次に、図14および15を参照し、フィラーコンポーネント102の様々な側面についてここで説明する。フィラーコンポーネント102は可撓性脚152を含んでおり、この脚は、ウェッジプレート100の遠位および近位窓138および140と係合することができるように構成されている。また、フィラーコンポーネント102は、カムリンク104の一部を受け入れることができるように構成された細長いカムスロット148も含んでいる。ウェッジプレート100におけるカムスロット136内からのカムリンク104の解放を促進するため、解放用端部150がカムスロット148の内部に設けられている。フィラーコンポーネント102は、さらに、ウェッジプレート100の近位方向への後退を制限すべく、ウェッジプレート100に設けられたタング146と係合するためのストッパー154(図13)、ならびにウェッジプレート100の戻しばね142の長さを受け容れることができる長手方向の凹部156を含んでいる。
【0067】
図16および17は、回転ノブ20に対して相対的な衝撃ばね56の位置関係を描いている。上で記されているように、衝撃ばね56は、外科用クリップ取付器10の操作との関係において以下でもっと詳しく説明されている如く、外科用クリップ72のクリンピング中に生じるジョー16の過剰な圧縮を防ぐための過圧機構として設けられている。この過圧機構は、外科医師により加えられるトリガー18のオーバーストロークを防ぎ、結果としてジョー16の損傷を防ぐことができるように設計されている。
【0068】
図18−20を参照すると、スピンドル60および関連する駆動コンポーネントが、細長い管状部材14を取り除いた状態で示されている。詳細には、図19に関して説明すると、フィードバー82のプッシャー108が、外科用クリップ72と係合すべく、ノーズ80に設けられたスロット158を通じて延びている。同様に、図20に示されているように、スピンドル60の近位端部においては、トリップレバー96が、フィードバー82に設けられた窓106を通じて延びている。この位置で、トリップレバー96は、スピンドル60と共に細長い管状部材14を通じてフィードバー82を遠位方向に駆動すべく、スロット106のエッジと係合することができる。ロックアウトウェッジ292は、スピンドル60のチャンネル294内において長手方向に移動することができる。ロックアウトウェッジの突起部298は、フィードバー82に設けられた窓286と結合する。
【0069】
図21を参照すると、図19と同様な図が示されているが、チャンネル70に位置付けられた外科用クリップ72と係合しているプッシャー108を明示するため、ノーズ80は取り除かれている。チャンネルカバー78およびノーズ80をしっかりとチャンネル70上に保持するため、T字型のタブ300がチャンネル70に設けられている。
【0070】
次に、図22を参照すると、スピンドル60および関連するコンポーネントが、フィードバー82を取り除いた状態で示されている。
【0071】
図23を参照すると、スピンドル60の遠位端部に存在するジョー16へ供給するためにチャンネル70内に位置付けられた多数のクリップ72が描かれている。クリップ72は、チャンネル70内において長手方向に配列されている。フィードバー82によりジョー16内へ進められるまでチャンネル70内におけるクリップ72の積み重なり(stack)を拘束(restrain)するため、チャンネル70の遠位端部には保持フィンガー71が設けられている。チャンネル70に設けられたランス302は、フィードバー82の突き合わせ面288と係合することができるように構成されている。
【0072】
図24を参照すると、フォロワー74およびフォロワーばね76と共に組み立てられたスピンドル60の中間セクションが描かれている。既に記されているように、ばね76は、フォロワー74をスピンドル60に対して相対的に遠位方向に付勢している。
【0073】
図25を参照すると、トリップレバー96および付勢ばね98と共に組み立てられたスピンドル60が描かれており、トリップレバー96は、付勢ばね98により最も上方の位置へ向けて付勢されている。ロックアウトウェッジ292はチャンネル294内に位置付けられている。
【0074】
図26および27を参照すると、ジョー16の周りでドライバー66と共に組み立てられたスピンドル60の反対側の側面が描かれている。既に記されているように、ドライバー66は、外科用クリップの周りで閉じたジョー16をカム作動させることができるように構成されている。従って、ジョー16は、ドライバー66の対応するカム作動面184(図34)を受け入れるための角度の付いたカム作動面160を含んでいる。ジョー16の近位端部に設けられたポケット187(図31)は、ドライバー66の後退を制限する。詳細には、スライダージョイント68の突起部186がジョー16のポケット187と係合する(図31&34参照)。
【0075】
次に、図28−30を参照し、チャンネル70、トリップロック84、ウェッジプレート100およびフィラーコンポーネント102の組み立てられた相対的な位置関係について説明する。最初に図29および30を参照しながら説明すると、フィラーコンポーネント102はチャンネル70上に位置付けられている。フィラーコンポーネント102の近位端部はチャンネル70に配置されたストッパー162と隣接している。ウェッジプレート100は、図示されている仕方でフィラーコンポーネント102上に横たわっている。図30において最も分かりやすく示されているように、フィラーコンポーネント102はカムスロット148を含んでおり、このカムスロットは、カムスロット148内に形成された解放用エッジ150を有している。同様に、ウェッジプレート100はカムスロット136を含んでいる。上で記されているように、ウェッジプレート100を遠位方向に駆動するため、カムリンク104が、スピンドル60(図示せず)に取り付けられた状態で設けられている。ウェッジプレート100の駆動を容易化するため、カムリンク104はカムリンクボス164を備えており、このカムリンクボスは、それぞれ、ウェッジプレート100およびフィラーコンポーネント102のスロット136および148に乗っている。カムリンク104がウェッジプレート100に対して相対的に遠位方向に進められると、カムリンクボス164は、ウェッジプレート100を遠位方向に駆動すべく、ウェッジプレート100の駆動エッジ166と係合する。以降の箇所で説明されている仕方において、カムリンク104、詳細にはカムリンクボス164がフィラーコンポーネント102の解放用エッジ150と係合すると、カムリンクボス164は、駆動エッジ166の係合から外れ、カム作動される。
【0076】
図30を参照しながら説明すると、フィラーコンポーネント102は可撓性脚152を備えており、この脚は、ウェッジプレート100の、それぞれ、遠位および近位窓138、140の間で移動可能である。近位または遠位窓のうちの一つから外して可撓性脚152をカム作動させるため、可撓性脚152にはカム面168が設けられており、このカム面は、フィラーコンポーネント102に対するウェッジプレート100の相対的な動きに対応して、可撓性脚152をこれらの窓から外してカム作動させる。
【0077】
本明細書のこれまでの箇所で記されているように、ジョー16は、外科用クリップ72を受け入れ、且つ、そこに位置付けられた外科用クリップ72を圧搾するために設けられている。図31および32を参照しながら説明すると、ジョー16は、一般的に、ベース172に固定された一対の可撓性脚170を含んでいる。ジョー部材16Aおよび16Bは、可撓性脚170の遠位端部に配置されている。一対のロッキングアーム174がベース172から遠位方向に延びており、タブ176で終結している。タブ176は、ジョー16を細長い管14に確保するため、細長い管14(図10)に設けられた対応する穴177と係合することができるように構成されている。ジョー16は、外科用クリップ72を受け入れるためのチャンネル22を含んでいる。既に記されているように、フィラーコンポーネント102は、ジョー16のすぐ後ろ側に位置付けられており、ジョー16と共に、外側管状部材14に対して相対的に長手方向に移動しない。
【0078】
差し当たり図32を参照しながら説明すると、ジョー16は、ウェッジプレート100の遠位先端部134が、最初に、ジョーセクション16aおよび16bを分離し、その後、ジョー16内への外科用クリップの挿入中に、それらのジョーセクションを、分離され、且つ、整列された配置に維持するために使用されるような仕方でウェッジプレート100を受け入れることができるように構成されている。既に記されているように、これは、外科用クリップ72をそれらのジョーの間に装填しているときに、ジョー16bに対して相対的なジョー16aのあらゆる捻れまたは屈曲が起こるのを防ぐ。柔軟性を有するそれぞれの脚170は、ウェッジプレート100の遠位先端部134をジョー16内へ誘導するためのカムエッジ178(図44&63参照)を含んでいる。
【0079】
図33を参照すると、ラッチリトラクター128がウェッジプレート100のスロット182を通じて延びるような仕方でスピンドル60に位置付けられたウェッジプレート100が描かれている。ウェッジプレート100が取り除かれた状態で図34において最も分かりやすく示されているように、ドライバー60の遠位先端部はカム作動面184を備えているのが分かる。カム作動面184は、ジョー16に対して相対的なドライバー60の長手方向の動きに対応してこれらのジョー16を一緒にカム作動させるべく、ジョー16に設けられたカム面160と協同する(図27参照)。スライダージョイント68の突起部186は、ジョー16に対するスライダージョイント68の相対的な後退を制限するため、ウェッジプレート100に設けられたスロット188を通じて延びている。
【0080】
次に、標的組織、例えば脈管などの周りで外科用クリップを圧搾するための外科用クリップ取付器10の操作について説明する。図35および36を参照しながら説明すると、トリガー18はラック202で総体的に圧縮されていない状態にあり、従って、スピンドル60は戻しばね208により最も近位側の位置へ付勢されている。さらに、アクチュエータ242は、カウンターレバー244をカウンター246から離れた状態に保持する最も近位側の位置にある。歯止め212は、ラック202に設けられた遠位凹部228に位置付けられている。図37−42において最も分かりやすく示されているように、先ず、図38を参照しながら説明すると、ファイヤリングされていない状態では、スピンドル60により担持され、且つ、付勢ばね98により上向きに付勢されたトリップレバー96は、フィードバー82に設けられたスロットに隣接し、且つ、そのスロットと接触した状態で位置付けられている。トリップブロック84は、トリップレバー96に対して相対的に遠位側の位置にある。フィードバー82に固定されたロックアウトウェッジは近位側の位置にある。
【0081】
図39を参照しながら説明すると、フォロワー74は、クリップ72が遠位方向に付勢されるような仕方で、ばね76により遠位側に付勢されている。
【0082】
図40を参照しながら説明すると、スピンドル60およびフィードバー82は、上向きの位置に付勢されているラッチリトラクター128により静止状態にある。
【0083】
図41を参照しながら説明すると、フィラーコンポーネント102の可撓性脚152は、ウェッジプレート100の遠位窓138内にある。スピンドル60に設けられた隆起機構部118は、可撓性脚152の近位側にある。
【0084】
図42において最も分かりやすく示されているように、外科用クリップ取付器10の遠位端部では、ファイヤリングされていない状態で休止している場合、ウェッジプレート100およびフィードバー82は、ジョー16に対して相対的に最も近位側の位置にある。プッシャー108はランス302の遠位側にある(図42A)。
【0085】
図43−47は、ウェッジプレート100、ジョー16およびフィラーコンポーネント102の休止位置における初期状態を描いている。
【0086】
最初に図43および44を参照すると、図示されているように、ウェッジプレート100は、ジョー16に対して相対的に最も近位側の位置にある。図43に示されているように、可撓性脚152はウェッジプレート100の遠位窓138内にあり、一方、カムリンク104は、ウェッジプレート100に設けられたカムスロット136に対して相対的に最も近位側の位置にある。
【0087】
図45および46において最も分かりやすく示されているように、ウェッジプレート100は、遠位先端部134がジョー16のカムエッジ178の近位側にある状態で、ジョー16に対して相対的に最も近位側の位置にある。
【0088】
図47を参照しながら説明すると、ウェッジプレート100は、ウェッジプレート100の駆動エッジ166がフィラーコンポーネント102の解放用エッジ150の近位側にあるような仕方で、フィラーコンポーネント102に対して相対的に最も近位側の位置にある。
【0089】
図48を参照しながら説明すると、クリップ取付器10の作動を開始させるため、トリガー18が初期スイング(swing)により動かされ、ウィッシュボーン型リンク204がラック202を遠位方向に駆動し、これにより、スピンドル60が遠位方向に駆動される。アクチュエータ242は、ピン206がアクチュエータ242に設けられた駆動スロット252を通じて移動するため、最も近位側の位置に留まったままである。差し当たり図50を参照しながら説明すると、もしトリガー18がこの時点で放たれる場合、ラック歯226は、近位方向の動きに抗じて歯止め歯222を拘束し、トリガー18の解放および外科用クリップ取付器10の部分的な作動または不注意による部分的な作動を防止するであろう。
【0090】
初期ストロークの間、スピンドル60は、予め定められた距離だけ移動する。図51を参照しながら説明すれば、スピンドル60が初期遠位方向距離だけ駆動されると、トリップレバー96がフィードバー82の細長い窓106と係合し、同様な距離だけフィードバー82を遠位方向に移動させる。ロックアウトウェッジ292は、フィードバー82により遠位方向に運ばれる。図42&51に示されているように、フィードバー82が遠位方向に駆動され、且つ、クリップ72がジョー16内へ送り込まれると、フォロワー74は、ばね76の付勢により遠位方向に移動し(図52)、外科用クリップ72の積み重なりを遠位方向に押しやる。
【0091】
図49を参照しながら説明すれば、ラック202が遠位方向に移動すると、歯止め212は、歯止め歯222が遠位凹部228から外れて移動してラック歯226上に乗り始めるような仕方で、時計方向に回転する。
【0092】
図53および54を参照しながら説明すれば、スピンドル60およびフィードバー82が遠位方向に移動すると、スピンドル60は、カムリンク104に設けられたカムリンクボス164がウェッジプレート100と係合するような仕方で、カムリンク104を初期距離だけ遠位方向に駆動する。図示されているように、フィラーコンポーネント102の可撓性脚152は、ウェッジプレート100の最遠位窓138内に位置付けられる。
【0093】
図55に示されているように、カムリンク104がスピンドル60と共に遠位方向に移動すると、カムリンクボス164が、ウェッジプレート100をフィラーコンポーネント102に対して相対的に遠位方向に駆り立てるべく、ウェッジプレート100に設けられた駆動エッジ166と係合する。
【0094】
図56を参照しながら説明すれば、フィードバー82が遠位方向に移動すると、フィードバー82の遠位端部に設けられたプッシャー108がクリップ72と係合し、クリップ72をジョー16内に駆り立て始める。注目すべきことに、この時点では、スピンドル60はまだドライバー66と接触しておらず、これにより、外科用クリップ72が完全に挿入される前にジョー16を圧縮することが防止されている。
【0095】
再び図55に戻って説明すれば、外科用クリップ取付器10が更なる第二の予め定められた距離を通じて作動されると、カムリンク104に設けられたカムボス164は、ウェッジプレート100を引き続き遠位方向に駆動し、可撓性脚152は、遠位窓138から外れてカム作動され、フィラーコンポーネント102を伴うウェッジプレート100と係合すべく、カム面168により近位窓140内へ送られる。図57&58に示されているように、この時点で、フィードバー82、ウェッジプレート100、スピンドル60、クリップ72およびフォロワー74(図52)は、すべて、最も遠位側の位置に動いている。
【0096】
図59を参照しながら説明すると、フィードバー82は、クリップ72をジョー16のチャンネル22内へ押しやるべく、フィードバー82の遠位端部に設けられたプッシャー108を外科用クリップ72に向けて駆り立て続ける。チャンネル70内の外科用クリップ72はフォロワー74により遠位方向に付勢され(図52)、ウェッジプレート100(図54)は、ドライバー66が細長い管状部材14に対して相対的に静止した状態のまま、遠位方向に移動し続ける。
【0097】
図60を参照しながら説明すれば、スピンドル60がさらに移動されると、カムリンク104のカムボス164は、図60の矢印により最も分かりやすく示されているように、フィラーコンポーネント102に形成された解放用エッジ150によって、ウェッジプレート100の駆動エッジ166との係合から外れてカム作動される。この更なる予め定められた距離のストロークの間、フィラーコンポーネント102の可撓性脚152はウェッジプレート100の近位窓140内に嵌り込んでおり、これにより、ウェッジプレート100は最も遠位側の位置から後退することが防止される。
【0098】
図61に示されているように、可撓性脚152はウェッジプレート100の近位窓140内に位置付けられており、これにより、フィードバー82およびスピンドル60が、矢印で示されているように遠位方向に移動し続けている間、ウェッジプレート100を引っ込められた状態に拘束している。
【0099】
図62−63に示されているように、ウェッジプレート100の遠位先端部134は、ジョー16aおよび16bに設けられたカム面178と係合することにより、ジョー部材16aおよび16bを離れる方向に駆り立てる。上で記されているように、ウェッジプレート100をジョー部材16aおよび16bのカム面178に位置付けることにより、ウェッジプレート100は、外科用クリップ72を適切に受け入れるべくジョー16を離れた状態に広げるだけでなく、さらに、個々のジョー部材16aおよび16bのそれぞれが相互関係において屈曲するのを抑えており、これにより、クリップがジョー16内に挿入されるときに生じるクリップ72のあらゆるトルクを防いでいる。
【0100】
図64を参照しながら説明すると、上で記されているように、可撓性脚152は、カムリンク104がフィラーコンポーネント102およびウェッジプレート100のスロット148および136を通じて進行し続けている間(図64)、ウェッジプレート100が近位側に後退するのを抑えている。
【0101】
図65において最も分かりやすく示されているように、スピンドル60がそのストロークを通じて遠位方向に移動し続けると、トリップレバー96は、トリップレバー96がトリップブロック84のカム作動面110(図10D参照)と係合するまで、スピンドル60と共に遠位方向に駆り立てられる。トリップブロック84のカム作動面110(図10D)がトリップレバー96に向けて駆り立てられると、トリップレバー96はフィードバー82の細長い窓106との係合から外れてカム作動され、このため、フィードバー82は、フィードバーばね88(図10参照)の付勢により、近位側の位置へ戻ることが可能になる。
【0102】
差し当たり図66を参照しながら説明すれば、スピンドル60がそのストロークを通じて移動し続けると、スピンドル60に設けられている隆起機構部118は、ウェッジプレート100の近位窓140から外れて、可撓性脚152をカム作動し始め、従って、ウェッジプレート100は外科用クリップ72がジョー16の間に圧搾される前に後退することができるようになり、外科用クリップ72がジョー16の間に圧搾される。この状態は図67において最も分かりやすく描かれており、そこでは、フィードバー82がクリップ72をジョー16内に完全に挿入しており、ウェッジプレート100は最も近位側の位置へ戻っている。
【0103】
図68は、フィードバー82がトリップレバー96から解放され、且つ、フィードバー82が近位方向に後退し始めることができるように、トリップレバー96のカム作動面110により、且つ、付勢ばね98の付勢に抗じて、フィードバー82との係合から外れてカム作動されているトリップレバー96を描いている。図69に示されているように、ジョー16内に挿入されたクリップ72を残してウェッジプレート100が後退すると、フィードバー82のプッシャー108は、次の最も遠位側に位置するクリップ72の後ろ側の近位側位置へ引っ込められる。
【0104】
図69Aを参照しながら説明すれば、トリガー18が圧縮し続けられると、ピン206は、ピン206が駆動スロット252の遠位端部304と係合するまで、アクチュエータ242に設けられた駆動スロット252内において遠位方向に進行する。その後、トリガー18がさらに圧縮されると、ピン206はアクチュエータ242を遠位方向に移動させる。トグルアーム244に設けられたピン264は接続用スロット254内において時計方向に回転し、これにより、トグルアーム244に設けられた接触アーム268を作動機構部248に向けて駆動する。
【0105】
図70を参照しながら説明すると、トリップレバー96はトリップブロック84のカム面110により完全に下向きにカム作動され、スピンドル60は更なる予め定められたストロークを通じて遠位方向に移動し続ける。
【0106】
差し当たり図71を参照しながら説明すれば、スピンドル60が遠位方向に移動し続けている間にウェッジプレート100が近位方向に引っ込められると、フィラーコンポーネント102に設けられた可撓性脚152はウェッジプレート100の遠位窓138内に嵌り込む。図72に示されているように、ウェッジプレート100は、ジョー16に対して相対的に近位側の位置へ引っ込められる。
【0107】
図73を参照しながら説明すれば、ラッチリトラクター128がスピンドル60に対して相対的に下向きにカム作動されると、スピンドル60は、予め定められた距離だけ遠位方向に移動する。スピンドル60の活動は、次に、ドライバー66と係合し、ドライバー66を遠位方向に押しやる。ドライバー66はスライダージョイント68を引き込み、同時的に、スライダージョイント68はラッチリトラクター128を遠位方向に引っ張って機械的にラッチリトラクター128のカム面をジョーパッド172の下側へ下向きに押しやり、ラッチリトラクター128をスピンドル60のスロット126と係合させる。
【0108】
図74−75を参照しながら説明すれば、トリガー18がスピンドル60を最も遠位側の位置へ駆動すべく充分に圧縮されると、トリガー18の圧縮が完了し、且つ、クリップ72が完全に形成されたときに、図74を参照しながら説明すれば、カウンターレバーが時計方向に充分に回転されてバンパー268をカウンターボタン248に向けて駆動し、これにより、カウンター246により表示される数字がインクリメントされる。
【0109】
以前の箇所において記されているように、カウンター246で示されている数字のインクリメントは、初めに外科用ステープラー10内に含まれていた外科用クリップ72の総数から減らされる方向であってよく、または外科用器械10により送給されたクリップの個数を指示すべくカウントアップされてもよい。
【0110】
差し当たり図75を参照しながら説明すれば、外科用器械10がすべてのクリップをファイヤリングすると、歯止め歯222は、ラック歯226から解放され、近位凹部230内に位置付けられる。注目すべきことに、クリップ72が初期位置からジョー16内に完全に挿入された位置に来るまでにはスピンドル60のフルストロークが必要である。スピンドル60がその最も遠位側の位置を通じて移動すると、スピンドルは、外科用クリップ72を圧搾すべく、本明細書の以前の箇所において説明されている仕方でドライバー66を移動させる。例えば、図76−79を参照しながら説明すると、ドライバー66は、ドライバー66に設けられたカム作動面184がジョー16aおよび16bをカム作動によって閉じ、これにより、それらのジョーの間に含まれている外科用クリップ72を閉じるような仕方で、ジョー16aおよび16bに設けられたカム作動面160に対して相対的に遠位方向に進行する。
【0111】
差し当たり図80を参照しながら説明すると、オーバーストローク状態を防ぎ、これにより、クリップ72の過剰な圧縮が組織、ジョー16またはドライバー66を損傷することを防止するため、安全機構が設けられている。もしトリガー18がクリップ72の完全な形成に必要なストロークを通り越して絞られ続けると、衝撃ばね56がノブ20およびブッシング48の間で定められたスペース内で圧縮し、これにより、スピンドル60の更なる遠位方向への動きが防止される。
【0112】
脈管Vの周りで形成された完全な形成形態のクリップが図81に描かれている。
【0113】
図82を参照しながら説明すれば、トリガー18が放されると(図示せず)、歯止め212は、歯止め歯222が、本ハンドルアセンブリをリセットすべく、ラック歯226に沿って乗るような仕方で、歯止めばね216の付勢に抗じて反時計方向に回転する。図83に示されているように、ドライバー66が後退すると、ラッチリトラクター128はその最も上方の位置に向けて上向きに再び付勢され、これにより、本駆動機構がリセットされる。
【0114】
図84−86を参照しながら説明すれば、スピンドル60が後退すると、スピンドル60の隆起機構部118は、フィラーコンポーネント102の可撓性脚152を通り越して移動する。ウェッジプレート100は、既に充分に引っ込められているため、移動しないことに留意すべきである。スピンドル60が後退すると、スピンドルは、カムリンク104を、ウェッジプレート100およびフィラーコンポーネント102のスロット136および148内において、その初期位置まで近位方向に引っ張る。図86において最も分かりやすく示されているように、この位置においては、クリップ取付器10は、再度ファイヤリングされるべく、従って、脈管に別のクリップを取り付けるべく、再び初期位置にある。
【0115】
次に図87から89までを参照し、最初に図87を参照しながら説明すれば、すべての外科用クリップ72が外科用クリップ取付器10から放出されると、フォロワー74は、突き合わせ面288がチャンネル70に設けられたランス302と係合するような仕方で最も遠位側の位置にあり、これにより、フォロワー74の近位方向に向けた引っ込みがロックアウトされ、または防止される。図示されているように、フィードバー82に設けられたプッシャー108は、後退時にフォロワー74と係合し、フィードバー82が近位方向に後退することができないような仕方で、ノーズ80およびフォロワー74の間に割り込む。
【0116】
図88に示されているように、フィードバー82が最も遠位側の位置に拘束されているため、フィードバー82に固定されているロックアウトウェッジ292も最も遠位側の位置に拘束されている。従って、スピンドル60が近位方向に後退しようとすると、ロックアウトウェッジ292に設けられた角度形成面296がスピンドル60の角度形成面290と係合し、これにより、スピンドル60の更なる後退が防止される。
【0117】
図89を参照しながら説明すると、スピンドル60が近位方向に完全に後退することができないため、ラック202は近位方向に完全に後退することができない。ラック歯226は歯止め歯222と係合し、歯止め212が遠位凹部228内へ戻るような仕方で回転するのを防いでおり、これにより、クリップ取付器10のリセットが防止されている。このようにして、クリップ取付器10は、最後の外科用クリップ72が送給された後に為されるあらゆる更なるファイヤリング試行が完全にロックアウトされている。歯止め歯222およびラック歯226が本駆動機構のあらゆる遠位方向の運動を防止しているため、特に、トリガー18は、さらに絞られることが防止されている。
【技術分野】
【0001】
(関連出願の引用)
本特許出願は、2004年10月8日に出願された、米国仮特許出願第60/617,104号、および、2004年10月8日に出願された、米国仮特許出願第60/617,016号に対する優先権を主張し、これらの出願は、共に、その全体が本明細書中に参考として援用される。
【0002】
(技術分野)
本技術分野は外科用クリップ取付器に関係する。より詳細には、本開示は、外科用クリップの挿入中にジョー構造を安定化させるための機構を有する、内視鏡外科用のクリップ取付器に関係する。
【背景技術】
【0003】
(関連技術の説明)
内視鏡用のステープラーおよびクリップ取付器は、当技術分野において既知であり、数多くの別個の有用な外科的手技で使用されている。腹腔鏡を用いる外科的手技のケースにおいては、腹部の内部へのアクセスは、皮膚に設けられた小さな入口切開部から挿入された細いチューブまたはカニューレを通じて達成される。身体の別な箇所で行われる侵襲性の極めて少ない手技は、一般的に、内視鏡的処置と呼ばれることが多い。典型的には、チューブまたはカニューレ装置が、アクセスポートをもたらすための入口切開部を通じて患者の身体内に伸ばされる。このポートにより、外科医師は、トロカールを用いてそこから数多くの異なる手術器械を挿入することができ、また、切開部から遠く離れた箇所で外科的手技を実施することができる。
【0004】
大多数のこれらの手技の間、外科医師は、一つもしくはそれ以上の脈管を通じる血液または他の流体の流れを停止させなければならないことが多い。外科医師は、しばしば、血管または他の管路に外科用クリップを取り付け、その手技の間、そこを通じる体液の流れを阻止するであろう。体腔への進入中に単一のクリップを取り付けるための内視鏡用クリップ取付器が当技術分野において知られている。そのような単一のクリップ取付器は、典型的には生体適合性材料から製作され、通常、脈管上において圧縮される。脈管に適用されると、その圧縮されたクリップは、その脈管を通じる流体の流れを停止させる。
【0005】
体腔内への単一の進入の間に内視鏡的処置または腹腔鏡的処置において複数のクリップを取り付けることができる内視鏡用クリップ取付器が、Greenらに付与された、同一出願人による特許文献1および特許文献2に記載されており、これらの両特許は、参照により、それらの内容全体が本明細書に組み入れられる。内視鏡用の別の多重クリップ取付器が、Prattらに付与された、同一出願人による特許文献3に開示されており、この特許も、参照により、その内容全体が本明細書に組み入れられる。これらの装置は、必ずということではないが、典型的には単回の外科的手技で使用される。米国特許出願第08/515,341号(Pierらに付与された特許文献4)は再滅菌可能な外科用クリップ取付器を開示しており、この特許の開示内容は、これをもって、参照により本明細書に組み入れられる。このクリップ取付器は、体腔内への単一の挿入で、複数のクリップを体腔内へ進行させ、複数のクリップを形成する。この再滅菌可能なクリップ取付器は、体腔内への単一の進入で複数のクリップを進行させ、且つ、複数のクリップを形成するため、交換可能なクリップマガジンを受け入れることができ、且つ、そのクリップマガジンと協同することができるように構成されている。一つの重要な設計目標は、装填手技によってクリップが何ら圧縮されることなく、外科用クリップをそれらのジョーの間に装填できるようにすることである。装填中に生じるクリップのそのような撓みまたは捻れは、しばしば、数多くの予期せぬ結果を引き起こす。装填中に生じるそのような圧縮は、それらのジョーの間のクリップのアラインメントを僅かに変えてしまう可能性がある。これは、外科医師が、そのクリップを廃棄するため、それらのジョーの間からクリップを取り除かねばならない事態を招くであろう。さらに、このようなプレ装填圧縮は、クリップの一部を圧縮し、クリップの幾何学的形状を変えてしまう可能性がある。これは、外科医師が、そのクリップを廃棄するため、それらのジョーの間から圧縮されたクリップを取り除かねばならない事態を招くであろう。
内視鏡的処置または腹腔鏡的処置は、切開部から遠く離れた箇所で行われることが多い。その結果として、これらのクリップの適用は、視野が狭くなることにより、またはこの装置の近位端部におけるユーザーに対する触覚フィードバックが低減することにより、複雑なものになりかねない。従って、ユーザーに対して個々のクリップのファイヤリング(firing)、装填装置内に含まれているクリップの使い果たし、または何らかの他の外科的事象の指示を提供することにより、器械の操作を改善することが望ましい。また、クリップの成功裏の装填を促進し、そして、開いた状態の外科用クリップ取付器のジョーを割り込ませ、その後、クリップのあらゆる損傷または過剰な圧縮を防止し、且つ、ファイヤリングの前にクリップに及ぼされるジョーの圧縮を防ぐため、それらのジョーの間にクリップを装填する外科用クリップ取付器を提供することも望ましい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第5,084,057号明細書
【特許文献2】米国特許第5,100,420号明細書
【特許文献3】米国特許第5,607,436号明細書
【特許文献4】米国特許第5,695,502号明細書
【発明の概要】
【課題を解決するための手段】
【0007】
(要旨)
本開示の第一の側面によれば、身体組織へ外科用クリップを取り付けるための装置が提供され、その装置は、ハンドル部分およびそのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体を有している。また、この装置は、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリも有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート、および、それらのジョー部分が離間配置位置にあるときに、外科用クリップをジョーアセンブリへ向けて個別的に遠位方向へ進行させることができるように構成されたクリッププッシャーも有している。尚もさらに、本装置は、本体の内部に少なくとも部分的に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ、および、それらのジョー部分を近接配置位置へ動かすことができるように、前述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材も有している。
【0008】
本開示の別の側面によれば、本装置は、ウェッジプレートが第一および第二のジョー部分の間を長手方向に移動したときに、それらの第一および第二のジョー部分を付勢するウェッジプレートを有している。このウェッジプレートは、クリップの装填中、第一および第二のジョー部分を予め定められた一定の関係に維持する。この予め定められた一定の関係により、クリップを装填している間に生じる第一および第二のジョー部材の屈曲が防止される。
【0009】
本開示の別の側面によれば、本装置は、丸みを帯びた遠位先端を伴うウェッジプレートを有している。
【0010】
本開示の別の側面によれば、本装置は、第一の近位窓を伴うウェッジプレートを有している。この第一の近位窓は、本体内に配置されたある部材により係合されるべく成されており、また、最も遠位側の位置でウェッジプレートを保持することができるように構成されている。前述の最も遠位側の位置は、第一および第二のジョー部材の間である。
【0011】
本開示の別の側面によれば、本装置は、第二の近位窓を伴うウェッジプレートを有している。この第二の近位窓は上述の部材により係合されるべく成されており、また、第二の近位窓は最も近位側の位置でウェッジプレートを保持することができるように構成されている。この最も近位側の位置は、第一および第二のジョー部材から後ろよりの位置である。ウェッジプレートの最も近位側の位置は、第一および第二のジョー部材がクリップを圧縮することができるように構成されている。
【0012】
本開示の別の側面によれば、本装置は、アクチュエータにより第二の近位窓から第一の近位窓へ移動可能な部材を有している。このアクチュエータはウェッジプレートを遠位方向に移動させる。前述の部材は、ウェッジプレートが遠位方向に移動するときに、第二の近位窓から第一の近位窓へ移動する。
【0013】
本開示の別の側面によれば、上述のアクチュエータはさらにカムリンクを含んでいる。このカムリンクは、ウェッジプレートに設けられたカムスロットと係合可能である。このカムリンクがウェッジプレートを遠位方向に移動させる。
【0014】
本開示の別の側面によれば、上述の部材は可撓性脚である。
【0015】
本開示の別の側面によれば、本装置は、駆動エッジを伴うカムスロットを有している。上述のカムリンクがこの駆動エッジと係合する。カムリンクは、ウェッジプレートを長手方向遠位側に移動させるように構成されている。
【0016】
本開示の別の側面によれば、アクチュエータが遠位方向に駆動されるときに、カムリンクが遠位側に駆動される。カムリンクは、カムスロットの駆動エッジと係合する。カムリンクは、ウェッジプレートを長手方向に動かし、丸みを帯びたその遠位端部を第一および第二のジョー部材の間に移動させる。上述の部材は、装填するため、第一の近位窓と係合し、ウェッジプレートを第一および第二のジョーの間に保持する。
【0017】
本開示の別の側面によれば、カムリンクがさらに遠位側に駆動されると、カムリンクは駆動エッジを解放し、カムスロット内を横行する。このカムリンクにより、ウェッジプレートは丸みを帯びた遠位端部を第一および第二のジョー部材の間から近位方向に移動させることが可能に成されている。上述の部材は、第二の近位窓と係合し、ウェッジプレートを最も近位側の位置に保持する。
【0018】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置は、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、およびその本体の内部に配置された複数の外科用クリップを有している。また、本装置は、上述の本体の遠位端部に隣接して取り付けられたジョーアセンブリ、およびそのジョーアセンブリへ向けて外科用クリップを遠位方向に個別的に進行させることができるように構成されたクリッププッシャーも有している。さらに、本装置は、少なくとも部分的に本体の内部に配置され、且つ、カウンター機構を伴うハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも含んでいる。このカウンター機構はハンドル部分と関わり合っており、また、このカウンター機構は、ハンドル部分の作動に対応して指標を与える。
【0019】
本開示の別の側面によれば、上述のカウンター機構は液晶ディスプレイを含んでいる。
【0020】
本開示の別の側面によれば、上述のカウンター機構はバックライトを含んでいる。
【0021】
本開示の別の側面によれば、上述のカウンター機構は、ハンドル部分の完全作動時に指標が与えられる。
【0022】
本開示の別の側面によれば、本装置は、上述のアクチュエータにより始動されるカウンター機構を有している。
【0023】
本開示の別の側面によれば、上述のカウンター機構はハンドル内にあり、前述のアクチュエータに接続されている。このカウンター機構は、前述のアクチュエータに接続される部材を有している。また、このカウンター機構は、ディスプレイ接触子を備えた液晶ディスプレイを有している。このディスプレイ接触子は、上述の部材がディスプレイ接触子と接触したときに活動化される。
【0024】
本開示の別の側面によれば、上述の部材は回転可能である。この部材は、ディスプレイ接触子と接触すべく、アクチュエータの長手方向の動きに対応して回転する。
【0025】
本開示の別の側面によれば、上述のカウンター機構は、レンズを有する液晶ディスプレイである。この液晶ディスプレイは画像を表示する。前述のレンズは、この画像を拡大する。
【0026】
本開示の別の側面によれば、上述のアクチュエータは開口を含んでいる。上述の部材を伴うカウンター機構は、第一アームおよび第二アームを有している。この第一アームは前述の開口に接続されている。前述のアクチュエータが長手方向遠位側に移動すると、そのアクチュエータは第一のアームを偏向させ、上述の部材がその動きに対応して回転する。第二のアームは、前述の部材の回転に対応してディスプレイ接触子と接触する。このディスプレイ接触子は、前述の第二アームがディスプレイ接触子と接触したときに活動化される。
【0027】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための措置が提供される。この装置は、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリを有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、それらのジョー部分が離間配置位置にあるときに外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャー、および少なくとも部分的に本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも有している。さらに、本装置は、上述の第一および第二のジョー部分に隣接して配置され、且つ、それらのジョー部分を前述の近接配置位置へ移動させることができるジョー閉鎖部材、および、複数のクリップが実質的に使い果たされているときに外科用クリップの組織への適用を防止すべく、上述のクリッププッシャーと係合することができるように構成されたロックアウト機構も有している。
【0028】
本開示の別の側面によれば、上述のロックアウト機構はある部材を有している。その部材は、アクチュエータと共に最も遠位側の位置まで長手方向に移動可能である。この部材は上述の最も遠位側の位置へ到達し、且つ、この部材が前述のクリッププッシャーと係合する。この部材により、クリッププッシャーは外科用クリップをジョーアセンブリへ向けて遠位方向に進行させることが防止される。
【0029】
本開示の別の側面によれば、本装置は、さらに、クリップフォロワーを含んでいる。このクリップフォロワーは、本体内に配置されたクリップを遠位方向に付勢する。前述のロックアウト機構はある部材を含んでいる。その部材は、アクチュエータと共に最も遠位側の位置まで長手方向に移動可能である。この部材は上述の最も遠位側の位置に到達し、且つ、この部材が前述のフォロワーと係合する。この部材により、フォロワーは近位方向に引っ込められることが防止される。クリッププッシャーが引っ込められると、クリッププッシャーは上述のフォロワーと係合する。この部材により、クリッププッシャーは外科用クリップをジョーアセンブリへ向けて遠位方向に進行させることが防止される。
【0030】
本開示の別の側面によれば、上述の部材はロックアウトウェッジである。
【0031】
本開示の別の側面によれば、上述の部材は、少なくとも一つの部材角度形成面を有している。上述のアクチュエータは、少なくとも一つのアクチュエータ角度形成面を有している。アクチュエータが近位方向に引っ込められると、前述の少なくとも一つのアクチュエータ角度形成面が上述の部材角度形成面と係合する。この係合は、アクチュエータが近位側の位置から最も近位側の位置へ引っ込められるのを防止する。
【0032】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置は、ハンドル部分、およびそのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体を有している。また、本装置は、上述の本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリも有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。さらに、本装置は、それらのジョー部分が離間配置位置にあるときに、外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャーも有している。本装置は、さらに、少なくとも部分的に上述の本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータを有している。また、本装置は、それらのジョー部分を近接配置位置へ移動させることができるように上述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材、ならびに前述のアクチュエータに接続されている複数のラチェット歯を備えたラックも有している。さらに、本装置は、前述のラチェット歯と係合することができるように構成された、少なくとも一つの歯を備えた歯止めも有している。この歯止めは、ハンドル部分内において付勢されている。アクチュエータが長手方向に動かされると、前述のラチェット歯は上述の歯止め上を通過する。この歯止めは、本装置の完全作動前にアクチュエータが偶発的に戻ってしまうのを防ぐことができるように構成されている。また、本装置は、前述の第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレートも有している。
【0033】
本開示の別の側面によれば、上述の歯止めは、歯止めばねにより付勢されている。この歯止めばねは、歯止めを前述のラックと係合する状態に付勢している。
【0034】
本開示の別の側面によれば、本装置は、さらに、ハンドル部分の内側に接続されている第一および第二の支柱を含んでいる。これらの第一および第二の支柱は、上述の歯止めばねを支えることができるように構成されている。
【0035】
本開示の別の側面によれば、外科用クリップを身体組織へ適用するための装置が提供される。この装置も、ハンドル部分、そのハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体、その本体の内部に配置された複数の外科用クリップ、および前述の本体の遠位端部に隣接して取り付けられたジョーアセンブリを有している。このジョーアセンブリは、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含んでいる。また、本装置は、それらのジョー部分が離間配置位置にあるときに、外科用クリップをそのジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されたクリッププッシャー、および少なくとも部分的に上述の本体の内部に配置され、且つ、ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータも有している。本装置は、さらに、それらのジョー部分を近接配置位置へ移動させることができるように前述の第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材を有している。上述の本体部分はある外径を有している。また、上述のジョーアセンブリは、離間配置位置において、ある幅を有している。この幅は、前述の本体の外径よりも小さく、またはその外径に等しい。
【0036】
本開示の別の側面によれば、本装置は、ある長さを持った本体を有している。その長さは、肥満症治療手術における使用を促進するのに適した長さである。本開示の別の側面によれば、肥満症治療手術における使用を促進するのに適した長さを有する本装置は、30センチメートルより大きい長さを有している。
本発明は、例えば以下の項目を提供する。
(項目1)
身体組織へ外科用クリップを取り付けるための装置であって、当該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
f)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
g)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;および
h)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
を含む、外科用クリップ取付器。
(項目2)
前記ウェッジプレートは、該ウェッジプレートが前記第一および第二のジョー部分の間で長手方向に移動されるときに、該第一および第二のジョー部分を付勢し;そして
前記ウェッジプレートは、該クリップの装填中、該第一および第二のジョー部分を予め定められた一定の関係に維持し、ここで、該予め定められた一定の関係が、クリップの装填中に生じる該第一および第二のジョー部材の屈曲を防いでいる;
項目1記載の装置。
(項目3)
前記ウェッジプレートが丸みを帯びた遠位先端部を有している、項目2記載の装置。
(項目4)
前記ウェッジプレートが第一の近位窓を有しており、該第一の近位窓は、最も遠位側の位置において該ウェッジプレートを保持することができるように構成されている前記本体の内部に配置されたある部材により係合されるべく成されており、該最も遠位側の位置が該第一および第二のジョー部材の間である、項目2記載の装置。
(項目5)
前記ウェッジプレートが第二の近位窓を有しており、該第二の近位窓は前記部材により係合されるべく成されており、該第二の近位窓は、該ウェッジプレートを最も近位側の位置において保持することができるように構成されており、該最も近位側の位置は前記第一および第二のジョー部材の後ろ側であり、該ウェッジプレートの該最も近位側の位置は、前記第一および第二のジョー部材が該クリップを圧縮することができるように構成されている、項目4記載の装置。
(項目6)
前記部材は、該アクチュエータにより該第二の近位窓から第一の近位窓へ移動可能であり、該アクチュエータは前記ウェッジプレートを遠位方向に移動させ、ここで、前記部材は、該ウェッジプレートが遠位方向に移動するときに、前記第二の近位窓から前記第一の近位窓へ移動する、項目5記載の装置。
(項目7)
前記アクチュエータがさらにカムリンクを含み、該カムリンクは該ウェッジプレートに設けられたカムスロットと係合可能であり、該カムリンクが該ウェッジプレートを遠位方向に移動させるためのものである、項目1記載の装置。
(項目8)
前記部材が可撓性脚である、項目6記載の装置。
(項目9)
前記カムスロットが駆動エッジを有しており、前記カムリンクが該駆動エッジと係合し、該カムリンクが該ウェッジプレートを遠位方向に向けて長手方向に移動させることができるように構成されている、項目7記載の装置。
(項目10)
前記アクチュエータが遠位方向に駆動されるときに、前記カムリンクが遠位方向に駆動され、該カムリンクが前記カムスロットの該駆動エッジと係合し、該カムリンクは、前記第一および第二のジョー部材の間に該丸みを帯びた遠位端部を移動させるべく、前記ウェッジプレートを長手方向に移動させ、ここで、前記部材が、装填のため、該ウェッジプレートを前記第一および第二のジョーの間に保持すべく、該第一の近位窓と係合する、項目9記載の装置。
(項目11)
前記カムリンクがさらに遠位方向に駆動されるときに、該カムリンクが前記駆動エッジを解放して前記カムスロット内を横断し、該カムリンクは、前記ウェッジプレートが該丸みを帯びた遠位端部を前記第一および第二のジョー部材の間から近位方向に移動させるのを可能に成し;
ここで、前記部材が、該ウェッジプレートを該最も近位側の位置に保持すべく、前記第二の近位窓と係合する;
項目10記載の装置。
(項目12)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリ;
e)外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記ハンドル部分と連合したカウンター機構であって、該ハンドル部分の作動に対応して指標を与えるカウンター機構;
を含む、外科用クリップ取付器。
(項目13)
前記カウンター機構が液晶ディスプレイを含む、項目12記載の装置。
(項目14)
前記カウンター機構がバックライトを含む、項目12記載の装置。
(項目15)
前記カウンター機構は、該ハンドル部分の完全作動時に指標が与えられる、項目12記載の装置。
(項目16)
前記カウンター機構が該アクチュエータによりトリガーされる、項目12記載の装置。
(項目17)
前記カウンター機構は該ハンドル内にあって該アクチュエータに接続されており、該カウンター機構は該アクチュエータに接続されたある部材を有しており、ここで、該カウンター機構はディスプレイ接触子を備えた液晶ディスプレイを有しており、該ディスプレイ接触子は、前記部材が該ディスプレイ接触子と接触したときに作動される、項目16記載の装置。
(項目18)
前記部材が回転可能であり、該部材が、前記ディスプレイ接触子と接触させるべく、該アクチュエータの長手方向の動きに対応して回転する、項目17記載の装置。
(項目19)
前記カウンター機構がレンズを有する液晶ディスプレイであり、該液晶ディスプレイはある画像を表示し、該レンズが該画像を拡大する、項目12記載の装置。
(項目20)
前記アクチュエータが開口を含み、前記カウンター機構が第一アームおよび第二アームを伴う前記部材を有しており、該第一アームは該開口に接続されており;
ここで、該アクチュエータが遠位方向に向けて長手方向に移動したときに、該アクチュエータは該第一アームを偏向させ、前記部材が該動きに対応して回転し;そして
前記第二アームは該部材の該回転に対応して前記ディスプレイ接触子と接触し、該ディスプレイ接触子は、前記第二アームが該ディスプレイ接触子と接触したときに作動される;
項目17記載の装置。
(項目21)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;および
h)前記複数のクリップが実質的に使い果たされたときに、組織への該外科用クリップの適用を防止すべく、前記クリッププッシャーと係合することができるように構成されているロックアウト機構;
を含む、外科用クリップ取付器。
(項目22)
前記ロックアウト機構がある部材を有しており、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり、ここで、該部材が該最も遠位側の位置に達したときに、該部材は前記クリッププッシャーと係合し、該部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている、項目21記載の装置。
(項目23)
さらに、クリップフォロワーを含み、該クリップフォロワーは、前記本体の内部に配置された該複数のクリップを遠位方向に付勢しており;
ここで、前記ロックアウト機構はある部材を含んでおり、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり;
前記部材が該最も遠位側の位置に達したときに、該部材は前記フォロワーと係合し、該部材により、該フォロワーが近位方向に後退することが防止されており;
該クリッププッシャーが後退すると、該クリッププッシャーは前記フォロワーと係合し、ここで、前記部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている;
項目21記載の装置。
(項目24)
前記部材がロックアウトウェッジである、項目22記載の装置。
(項目25)
前記部材がロックアウトウェッジである、項目23記載の装置。
(項目26)
前記部材が少なくとも一つの部材角度形成面を有しており、また、前記アクチュエータが少なくとも一つのアクチュエータ角度形成面を有しており、ここで、該アクチュエータが近位方向に後退すると、該少なくとも一つのアクチュエータ角度形成面が該部材角度形成面と係合し、該係合により、該アクチュエータが最も近位側の位置の近位側に後退することが防止されている、項目23記載の装置。
(項目27)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
h)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
i)前記アクチュエータに結合されている複数のラチェット歯を有するラック;および
j)前記ラチェット歯と係合することができるように構成されている少なくとも一つの歯を有する歯止めであって、該歯止めは前記ハンドル部分内において付勢されており、ここで、該アクチュエータが長手方向に移動されると、前記複数のラチェット歯は該歯止め上を通り越し、該歯止めは、当該装置が完全作動する前に生じる該アクチュエータの不慮の戻りを防止することができるように構成されている、歯止め;
を含む、外科用クリップ取付器。
(項目28)
前記歯止めが歯止めばねにより付勢されており、ここで、該歯止めばねが歯止めを前記ラックとの係合に向けて付勢している、項目27記載の装置。
(項目29)
さらに、前記ハンドル部分の内側に接続された第一および第二の支柱を含んでおり、該第一および第二の支柱が前記歯止めばねを支持することができるように構成されている、項目28記載の装置。
(項目30)
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)該ジョー部分を前記近接配置位置へ移動させるため、前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、ここで、該本体部分がある外径を有しており、また、前記ジョーアセンブリは該離間配置位置においてある幅を有しており;ここで、該幅が該本体の該外径未満であるか、該外径に等しい、ジョー閉鎖部材;
を含む、外科用クリップ取付器。
(項目31)
前記本体がある長さを有しており、該長さが肥満症治療手術における使用を容易化するのに適した長さである、項目30記載の装置。
(項目32)
前記長さが30センチメートルより長い、項目31記載の装置。
【図面の簡単な説明】
【0037】
外科用クリップ取付器の特定の実施態様が、添付図面を参照しながらここで開示されている。
【図1】図1は外科用クリップ取付器の透視図である。
【図2】図2は、図1に示されている外科用クリップ取付器の別の透視図である。
【図3】図3は、その外科用クリップ取付器におけるジョー構造の拡大された透視図である。
【図4】図4は、その外科用クリップ取付器の上面図である。
【図5】図5は、その外科用クリップ取付器の側面図である。
【図6】図6は、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの側面図である。
【図6A】図6Aおよび6Bは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図6B】図6Aおよび6Bは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図6C】図6Cは、本体の半分が取り除かれた状態の、その外科用クリップ取付器におけるハンドルアセンブリの側面図である。
【図6D】図6Dは、本体の半分が取り除かれた状態において、反対側から見たときの、その外科用クリップ取付器におけるハンドルアセンブリの透視図である。
【図7】図7は、シャフトアセンブリを伴う、そのクリップ取付器におけるハンドルの分解透視図である。
【図7A】図7Aは、駆動リンクおよびスピンドル接続の透視図である。
【図7B】図7Bは、ノブ、ブッシングおよび保持ピンの断面図である。
【図7C】図7Cは、そのノブの透視図である。
【図7D】図7Dは、その外管における近位端部の透視図である。
【図7E】図7Eは、ブッシングと共に組み立てられたその外管における近位端部の透視図である。
【図8】図8は歯止めの透視図である。
【図9】図9はラックの透視図である。
【図9A】図9Aは、そのラックの別の透視図である。
【図9B】図9Bおよび9Cはアクチュエータプレートの反対側の透視図である。
【図9C】図9Bおよび9Cはアクチュエータプレートの反対側の透視図である。
【図9D】図9Dおよび9Eはトグルアームの反対側の透視図である。
【図9E】図9Dおよび9Eはトグルアームの反対側の透視図である。
【図9F】図9Fおよび9Gはウィッシュボーン型リンクの反対側の透視図である。
【図9G】図9Fおよび9Gはウィッシュボーン型リンクの反対側の透視図である。
【図10】図10は、本外科用クリップ取付器におけるシャフトアセンブリの分解透視図である。
【図10A】図10Aはフィードバーの透視図である。
【図10B】図10Bは、フォロワーおよび外科用クリップの透視図である。
【図10C】図10Cおよび10Dはトリップブロックの反対側の透視図である。
【図10D】図10Cおよび10Dはトリップブロックの反対側の透視図である。
【図10E】図10Eはスピンドルの透視図である。
【図10F】図10Fは、図10Eの細部の拡大図である。
【図10G】図10Gは、図10Eの細部の拡大図である。
【図10H】図10Hは、フォロワーの下側の突き合わせ(abutmet)面を描いた、フォロワーの透視図である。
【図11】図11は、スピンドルの遠位端部およびドライバーの透視図である。
【図12】図12は、そのスピンドルおよびロックアウトウェッジのトリップレバー機構の透視図である。
【図13】図13は、ウェッジプレートおよび付勢ばねの透視図である。
【図14】図14および15は、フィラーコンポーネントの反対側の透視図である。
【図15】図14および15は、フィラーコンポーネントの反対側の透視図である。
【図16】図16は、回転ノブおよびシャフトアセンブリの透視図である。
【図17】図17は過圧アセンブリの透視図である。
【図18】図18は、スピンドルおよびジョーアセンブリの透視図である。
【図19】図19は、図18におけるスピンドルおよびジョーアセンブリの細部の拡大図である。
【図20】図20は、図18におけるスピンドルおよびトリップレバーの細部の拡大図である。
【図21】図21は、外管が取り除かれた状態における本外科用クリップ取付器の遠位端部の拡大図である。
【図22】図22は、パーツが取り除かれた状態における本外科用クリップ取付器のシャフトアセンブリの透視図である。
【図23】図23は、図22の細部の拡大図である。
【図24】図24は、図22の細部の拡大図である。
【図25】図25は、図22の細部の拡大図である。
【図26】図26は、スピンドル、ドライバーおよびジョーアセンブリの透視図である。
【図27】図27は、図26の細部の拡大図である。
【図28】図28は、カムリンクおよびウェッジプレートアセンブリの透視図である。
【図29】図29は、図28の細部の拡大図である。
【図30】図30は、図29の細部の拡大図である。
【図31】図31は、フィラーコンポーネントおよびジョーアセンブリの透視図である。
【図32】図32は、図31に示されているジョーアセンブリの拡大された透視図である。
【図33】図33および34は、ウェッジプレートおよびドライバーを含む、スピンドルの遠位端部の透視図である。
【図34】図33および34は、ウェッジプレートおよびドライバーを含む、スピンドルの遠位端部の透視図である。
【図35】図35は、部分的に断面で示されている、ファイヤリングする前の状態における本外科用クリップ取付器の側面図である。
【図36】図36は、図35の細部の拡大図である。
【図37】図37は、図35の細部の拡大図である。
【図38】図38は、トリップレバーを示す、図37の細部の拡大図である。
【図39】図39は、フォロワーを示す、図37の細部の拡大図である。
【図40】図40は、図37の細部の拡大図である。
【図41】図41は、図40の細部の拡大図である。
【図42】図42は、断面で示されている、図37における本外科用クリップ取付器の遠位端部の側面図である。
【図42A】図42Aは、断面で示されている、あるチャンネル上でのフィードバックプッシャーおよびランスの側面図である。
【図43】図43は、ウェッジプレートおよびジョーアセンブリの透視図である。
【図44】図44は、ウェッジプレートおよびジョー部材を示す、図43の細部の拡大図である。
【図45】図45は、線45−45に沿って取った、図43の上面図である。
【図46】図46は、ジョーおよびウェッジプレートを示す、図45の細部の拡大図である。
【図47】図47は、ウェッジプレートおよびカムリンクを示す、図45の細部の拡大図である。
【図48】図48は、断面で示されている、初期ストロークの開始時におけるハンドルハウジングの側面図である。
【図49】図49は、ラックおよび歯止めを示す、図48の細部の拡大図である。
【図50】図50は、図49と同様な、図48の細部の拡大図である。
【図51】図51は、断面で示されている、フィードバーおよびトリップレバーの側面図である。
【図52】図52は、断面で示されている、フォロワーの側面図である。
【図53】図53は、断面で示されている、本外科用クリップ取付器の内視鏡部分の側面図である。
【図54】図54は、スピンドルの動きを描いた、図53の細部の拡大図である。
【図55】図55は、カムリンクの動きを描いた、ウェッジプレートおよびフィラーコンポーネントの上面図である。
【図56】図56は、断面で示されている、クリップを進行させるフィードバーの動きを描いた側面図である。
【図57】図57は、遠位方向に動くウェッジプレートおよびカムリンクの上面図である。
【図58】図58は、断面で示されている、ウェッジプレート窓から外れてカム作動された(cammed)可撓性脚の動きを示す側面図である。
【図59】図59は、ジョーに入るクリップを描いた側面図である。
【図60】図60は、カムリンクおよびウェッジプレートの動きを示す更なる上面図である。
【図61】図61は、断面で示されている、可撓性脚およびウェッジプレートの離脱の様子を描いた側面図である。
【図62】図62は、ジョー構造に入るウェッジプレートの上面図である。
【図63】図63は、ジョー構造をカム作動により開いた(camming open)ウェッジプレートを示す透視図である。
【図64】図64は、ウェッジプレート内におけるカムリンクの更なる進行を描いた上面図である。
【図65】図65は、断面で示されている、フィードバーと係合したトリップレバーを描いた側面図である。
【図66】図66は、断面で示されている、可撓性脚をウェッジプレートとの係合から外れてカム作動するスピンドルを描いた側面図である。
【図67】図67は、断面で示されている、クリップをジョー構造内に装填するフィードバーを描いた側面図である。
【図68】図68は、断面で示されている、トリップブロックによるフィードバーとの係合から外れてカム作動されているトリップレバーを描いた側面図である。
【図69】図69は、断面で示されている、ウェッジプレートおよびフィードバーの引き込みを描いた側面図である。
【図69A】図69Aは、本体の半分が取り除かれた状態の、初期作動を描いた透視図である。
【図70】図70は、断面で示されている、スピンドルの更なる進行を描いた側面図である。
【図71】図71は、断面で示されている、ウェッジプレートの引き込みおよびスピンドルの更なる進行を描いた側面図である。
【図72】図72は、ジョー構造から後退するウェッジプレートの透視図である。
【図73】図73は、断面で示されている、ドライバーと係合するスピンドルおよびスピンドルと係合するラッチリトラクターを描いた側面図である。
【図74】図74は、トリガーがフルストローク状態にあるハンドルハウジングの側面図である。
【図75】図75は、歯止めがラックの歯を通過した状態の、図74の細部の拡大図である。
【図76】図76は、断面で示されている、外科用クリップの周りで閉じたジョーをカム作動するドライバーの側面図である。
【図77】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図78】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図79】図77〜図79は、外科用クリップの周りで閉じたジョーをカム作動するドライバーの逐次的な図である。
【図80】図80は、断面で示されている、衝撃ばねを含む過圧機構の図である。
【図81】図81は、脈管上に形成された外科用クリップの透視図である。
【図82】図82は、歯止めをリセットする様子の細部の拡大図である。
【図83】図83は、断面で示されている、ラッチリトラクターをリセットする様子を描いた側面図である。
【図84】図84は、断面で示されている、スピンドルを後退させる様子を描いた側面図である。そして
【図85】図85および86は、ウェッジプレート内におけるカムリンクのリセットを描いた上面図である。
【図86】図85および86は、ウェッジプレート内におけるカムリンクのリセットを描いた上面図である。
【図87】図87は、フォロワーがランスと係合する様子を描いた、本外科用クリップ取付器における遠位端部の側面図である。
【図88】図88は、部分的に断面で示した、ロックアウトウェッジがスピンドルと係合する様子の側面図である。
【図89】図89は、ロックアウト状態にある歯止めおよびラックの拡大図である。
【発明を実施するための形態】
【0038】
(詳細な説明)
外科用クリップの挿入中に外科用クリップ取付器のジョーを離間した安定な位置に保持することができるように構成されたジョー制御機構を有する、新規な内視鏡用の外科用クリップ取付器が提供される。ここで開示されているジョー制御機構は内視鏡用の外科用クリップ取付器において示され、説明されているが、その開示されているジョー制御機構は、あらゆる外科用クリップ取付器または一対の圧縮可能なジョーを有する他の器械にも適用可能であることを認識すべきである。
次に、図1−5を参照しながら説明すると、外科用クリップ取付器10は、一般的に、ハンドルアセンブリ12、およびハンドルアセンブリ12から遠位方向に延びた細長い管状部材14を含む内視鏡部分を含んでいる。ハンドルアセンブリ12はプラスチック材料から形成されており、一方、細長い管状部材14は生体適合性材料、例えばステンレス鋼などから形成されている。外科用クリップ取付器10の細長い管状部材14は使用目的に依存して様々な外径を有していてよく、例えばその外径は5mまたは10mmなどであってよい。さらに、細長い管状部材は、例えば肥満症治療手術などにおける使用目的に依存して、様々な細長い長さまたは短縮された長さを有していてよい。一つの実施態様においては、肥満症治療手術における細長い管状部材14は30センチメートルを超える長さを有していてよい。肥満症治療手術の一つの好適な実施態様においては、細長い管状部材14の長さは33センチメートルである。別の好適な実施態様においては、肥満症治療手術用の細長い管状部材14の長さは37センチメートルである。さらに別の好適な実施態様においては、肥満症治療手術用の細長い管状部材14の長さは40センチメートルであるが、当業者であれば、この外側の管状部材14は30センチメートルを超えるあらゆる長さを有していてよく、また、この開示が上のどの実施態様にも限定されるものではないことを認識するであろう。一対のジョー16が細長い管状部材14の遠位端部に取り付けられており、これらのジョーは、ハンドルアセンブリ12に可動的に取り付けられたトリガー18により作動される。ジョー16も、ステンレス鋼またはチタンなどの生体適合性材料で形成されている。注目すべきことに、幾つかの実施態様においては、ジョー16が相互関係において開いた状態にあるとき、それらのジョー16の最大幅は、開いた状態で本体のトロカールまたは他の部分を通じて挿入することができるように、細長い管状部材14の外径未満であるか、またはその外径に等しい。これは、特に、10mmのクリップ取付器の場合に当てはまる。ジョー16は、それらのジョーが細長い管状部材14に対して相対的に長手方向に関して同じ状態を保つような仕方で取り付けられている。ノブ20は、ハンドルアセンブリ12の遠位端部に回転可能に取り付けられており、長手方向軸の周りで細長い管状部材14およびジョー16を360度回転させることができるように細長い管状部材14に固定されている。差し当たり図3を参照しながら説明すると、ジョー16は、そこに外科用クリップを受け入れるためのチャンネル22を定めている。
【0039】
図2および4において最も分かりやすく示されているように、インジケーター、例えばハンドルアセンブリ12と連合されたカウンター機構などを見ることができるようにするため、ハンドルアセンブリ12には窓200が設けられている。
【0040】
次に、図6から7までを参照すると、クリップ取付器10のハンドルアセンブリ12が示されている。ハンドルアセンブリ12は長手方向に移動可能なラック202を含んでおり、このラックはウィッシュボーン型リンク204によりトリガー18に結合されている。ウィッシュボーン型リンク204をラック202に結合するため、ピン206が設けられている。ラック202は、トリガー18の作動に対応して外科用クリップを進行させ、ジョー16の間に外科用クリップを圧搾するために設けられている。ラック202は、ラック202とハウジング12内のジャーナル36内に取り付けられたブッシング210との間に位置付けられた戻しばね208により、近位側の位置へ付勢されている。
【0041】
外科用器械10の完全作動前にトリガー18およびラック202が偶発的に戻ってしまうのを防ぐため、歯止めピン214に歯止め212が可動的に取り付けられている。歯止め212は、以降の箇所においてもっと詳細に検討されている仕方でラック202と係合可能である。歯止め212をラック202との係合に向けて付勢させるため、歯止めばね216が二つのばね支柱218の間に設けられている。
【0042】
差し当たり図8を参照しながら説明すると、歯止め212は、歯止め212を歯止めピン214に取り付けるための歯止め穴220を含んでいる。また、歯止め212は、以下で説明されている仕方でラック202と係合可能な歯止め歯222も含んでいる。
【0043】
図7、9および9Aを参照しながら説明すると、ラック202は、一般的に、ラック202をピン206によりウィッシュボーン型リンク204に接続するためのラック穴224を含んでいる。また、ラック202はラック歯226も含んでおり、これらのラック歯は、歯止め歯222と係合可能であり、ハンドルアセンブリ12内におけるラック202の長手方向の動きを制限することができる。さらに、ラック202には、遠位凹部228および近位凹部230も設けられている。凹部228および230は、ラック202が近位方向の動きに逆転するときに、歯止め212が逆転し、ラック202上を後ろ向きに進むことができるようにするために設けられている。ラック202を以降の箇所において説明されている仕方で様々な駆動機構と係合させるため、ラック202には遠位フック232が設けられている。従って、トリガー18の作動は、ウィッシュボーン型リンク204を駆動させ、これにより、戻しばね208の付勢に抗じて、ウィッシュボーン型リンク204を通じてラック202を遠位方向に駆動する。
【0044】
差し当たり図9Fおよび9Gを参照しながら説明すると、ウィッシュボーン型リンク204は、上で記されているように、トリガー18をラック202に接続するために設けられている。詳細には、ウィッシュボーン型リンク204は、トリガー18に設けられている支柱(図示せず)と係合可能なスナップ嵌め式の端部またはロッキング機構部234を含んでいる。ウィッシュボーン型リンク204の反対側の端部に形成されたボア236は、ラックピン206に取り付けるために設けられている。ウィッシュボーン型リンク204に設けられたスロット238は、ウィッシュボーン型リンク204がその反対側からラック202を支持することを可能に成している。トリガー18およびウィッシュボーン型リンク204を含むリンケージ機構は、そのリンケージ機構がハンドルアセンブリ12内において占有するスペースを最小化しながら、より大きな機械的利点を可能に成している。ノブ20は、同じくハウジング12内のジャーナル36内に回転可能に取り付けられたフランジ34を含んでいる。
【0045】
次に、図6Aおよび6Bを参照しながら説明すると、上で記されているように、ハンドルアセンブリ12には、その近位端部に、ハンドルアセンブリ12と連合したインジケーター機構を見えるようにするための窓200が設けられている。これにより、ファイヤリングされたクリップの個数または外科用器械10内に残っているクリップの個数のいずれかに関する指示を与えることができるように構成された新規なカウンター機構240が提供される。カウンター機構240は、ハンドルアセンブリ12に枢動可能に取り付けられたトグルアーム244を介してハンドルアセンブリ12と連合されているアクチュエータ242により始動される。カウンター機構240は、一般的に、トリガー18の作動に対応してトグルアーム244により始動または作動される、例えば板ばねおよび接触子、ボタンなどの作動機構部248を有するカウンター246を含んでいる。カウンター246を保護するため、または運転中の英数字デジット(alpha−numeric digits)の倍率を高めるため、カウンター246とカウンター窓200との間にレンズ250が設けられている。カウンター246は、液晶ディスプレイ(LCD)、発光ダイオード(LED)またはアナログ/機械式のカウンターであってよい。また、カウンター246は、プリント回路基板、バッテリーおよびバックライトまたは照明付きの(lighted)ディスプレイも含んでいてよい。カウンター246は、残っているクリップの個数を指示するため、外科用器械10に当初与えられた外科用クリップの合計数からカウントダウンするように構成することができる。代替的に、カウンター246は、0から既にファイヤリングされたクリップの合計数までをカウントアップすることもできる。一つの想定されているカウンター246は、Golden View Display,Inc.から入手可能なLCDカウンターモジュールである。カウンター246は、ある事象の指示をもたらすことができる、当技術分野において既知のあらゆる装置であってよい。その事象は、本クリップ取付器10の使用手順または操作に関連したものであってよい。一つの好適な実施態様においては、カウンター246は様々なタイプの液晶ディスプレイであってよい。しかし、別の実施態様においては、そのディスプレイは、一つもしくはそれ以上の発光ダイオード、ルミネッセントディスプレイ、多色ディスプレイ、デジタルディスプレイ、アナログディスプレイ、受動ディスプレイ、能動ディスプレイ、いわゆる「ツイステッドネマチック」ディスプレイ、いわゆる「スーパーツイステッドネマチック」ディスプレイ、「デュアルスキャン」ディスプレイ、反射ディスプレイ、バックライトディスプレイ、英数字ディスプレイ、モノクロディスプレイ、いわゆる「Low Temperature Polyslicon Thin Film Transistor」もしくはLPTS TFTディスプレイ、またはその手順もしくはクリップ取付器10に関するパラメーター、情報もしくはグラフィックスを指示するあらゆる他のディスプレイであってよい。一つの実施態様においては、そのディスプレイは液晶ディスプレイまたは「LCD」である。前述のLCDは、外科医師に対して本クリップ取付器10に関する一つもしくはそれ以上の運転パラメーターを表示する白黒ディスプレイまたはカラーディスプレイであってよい。一つの実施態様においては、表示されるパラメーターは、残っているクリップの量、使用されたクリップの個数、位置パラメーター、手術経過時間(surgery time of usage)、またはその手技に関するあらゆる他のパラメーターであってよい。
【0046】
次に、差し当たり図9Bおよび9Cを参照し、アクチュエータ242の具体的な構造について説明する。上で記されているように、アクチュエータ242はトリガー18の動きに対応してカウンター機構240に指標を与えることができるように構成されており、従って、アクチュエータ242は、ラック202およびウィッシュボーン型リンク204を通じて延びるピン206の周りに位置付けされるべく構成されている駆動スロット252を含んでいる。駆動スロット252は、ピン206がアクチュエータ242と係合する前に、外科用器械10が予め定められたストローク長さを通じて作動させられることを可能に成している。トグルアーム244をカウンター246に向けて付勢するため、対応するピンをトグルアーム244に係合させるべく、接続用スロット254が設けられている。ハンドルアセンブリ12内におけるアクチュエータの往復運動の間に生じるアクチュエータ242のあらゆる屈曲または揺動を防ぐため、アクチュエータ242は、ハンドルアセンブリ12に形成されたハウジングレール258に沿って乗ることができるように構成されている一対のフィンガー256を備えている(図6B)。アクチュエータ242には、以降の箇所においてもっと詳しく説明されている仕方で戻しばねと係合することができるように、タブ260(図6Cおよび6D)が設けられている。
【0047】
差し当たり図9Dおよび9Eを参照しながら説明すると、カウンターレバー244は、ハウジングアセンブリ12内へ枢動可能に取り付けられている支柱262を含んでいる。トグルアーム244の第一端部はピン264を含んでおり、このピンは、ハウジングアセンブリ12内におけるアクチュエータ242の長手方向の動きがカウンターレバー244をスタッド262の回りで枢動させるような仕方で、アクチュエータ242の接続用スロット254内に係合可能である。トグルアーム244の反対側の端部は接触レバー268を含んでおり、この接触レバーは、カウンター246に設けられているカウンターボタン248と係合して押し下げ、これにより、カウンター246を始動させることができるように、または数字的に上昇するか下降するかのいずれかの予め定められた様式の数だけカウンター246をインクリメントすることができるように構成されている。
【0048】
ハンドルアセンブリ内に取り付けられているカウンター機構240、アクチュエータ242およびカウンターレバー244の様々なコンポーネントの配列は、図6Bから6Dまでにおいて最も分かりやすく描かれている。最初に図6B(ここでは、明確にするため、ラック202が省かれている)を参照すると、アクチュエータ242のフィンガー256がハウジングアセンブリ12内に形成されたハウジングレール258に沿って乗っている様子を見ることができる。ウィッシュボーン型リンク204と連合したピン206が駆動スロット252内に乗っている。アクチュエータ242の近位端部では、カウンターレバー244のピン264が接続用スロット254内に位置付けられている。
【0049】
次に、図6Cおよび6Dを参照しながら説明すると、トリガー18の作動前にカウンターレバー244をカウンター機構240との係合から外れた状態に維持しておくため、アクチュエータ242のばね260と係合可能な圧縮ばね270が設けられている。圧縮ばね270の反対側の端部は、アクチュエータ242を最も近位側の方向に付勢するため、ハウジングハンドルアセンブリ12の反対側に形成された対応する突起部と係合している。
【0050】
次に、クリップ取付器10と関わり合いを有する様々なエレメントおよび機構の組み合わせについて説明する。
【0051】
図10を参照しながら説明すると、ブッシング210をノブ20に確保しておくため、保持ピン50を含むブッシング48が設けられている。駆動リンク272は、駆動リンク272の近位端部がラック202と係合するような仕方でラック202(図6および7)に結合されている。詳細には、ラック202の遠位フック232は、駆動リンク272の近位端部に設けられているスロット274と係合する。以降の箇所においてもっと詳しく説明されている仕方において、本器械の作動中、ジョー16の過剰な圧縮を防ぐため、衝撃ばね56を含む過圧機構がブッシング48の間の外管14の周りに設けられており、ノブ20のボア内に収容されている。駆動リンク272は、ノブ20のボア58内に延びている。
【0052】
細長い管状部材14の近位端部に配置されたフランジがブッシング48の近位端部に隣接している(図7Dおよび7E)。
【0053】
引き続き図10を参照しながら説明すると、様々なコンポーネントを作動させるため、細長い管状部材14を通じる長手方向の運動用に取り付けられた作動機構またはスピンドル60が設けられている。スピンドル60はその近位端部にボス62を含んでおり、このボスは、スピンドル60のボス62をスピンドルリンク272の凹部276内に位置付けることにより、スピンドルリンク272の遠位端部に設けられた凹部64と係合することができ(図7A)、スピンドル60は、スピンドルリンク272およびスピンドル60の長手方向の動きとは独立して、外管アセンブリと共に回転することができる。図7Bにおいて最も分かりやすく示されているように、ブッシング48は、ノブ20内に位置付けられ、保持ピン50によりそこに確保されている。
【0054】
差し当たり図7Cおよび7Eを参照しながら説明すると、ブッシング48は一対の対向する長手方向リブ278を備えており、これらのリブは、配向のため、ノブ20の対応するスロット280内に嵌合する。
【0055】
次に、図7Dおよび7Eを参照すると、ブッシング48の近位端部の内面に形成されたタブ282は外管14に設けられた対応する切り欠き部284と係合することができるように構成されているのが分かる。従って、外管14は、ノブ20の回転に対応して回転することができるように成されている。
【0056】
図10を参照すると、ドライバー66およびスライダージョイント68を含むカム作動機構が、外科用クリップの周りで閉じたジョー16をカム作動させるため、スピンドル60の遠位端部から延びている。
【0057】
クリップ取付器10は、組織に適用するための複数の外科用クリップを保持することができるように構成されている。クリップ取付器10は、複数の外科用クリップ72を保持し、且つ、それらの外科用クリップ72をジョー16へ運ぶことができるように構成された、細長いチャンネル部材70を含んでいる。このチャンネル部材70およびジョー16は細長い管状部材14に対して相対的に長手方向に移動しないことに留意すべきである。フォロワー74は、外科用クリップ72をチャンネル部材70内において遠位方向に駆り立てるべくばね76により付勢されている。チャンネルカバー78は、その内部にあるばね76および外科用クリップ72を保持し、且つ、誘導すべく、チャンネル70の上に被さっている。外科用クリップ72をジョー16内に差し向けるのを補助するため、チャンネルカバー78の遠位端部にはノーズ80が設けられている。
【0058】
フィードバー82を含むフィーダー機構は、個々のクリップ72をジョー16内へ進行させるため、チャンネルカバー78に対して相対的に長手方向の動きをもたらすことができるように設けられている。フィードバー82を近位方向に付勢させるため、ガイドピン86およびフィードバーばね88を有するトリップブロック84がチャンネルカバー78の近位端部に隣接して設けられている。詳細には、ガイドピン86の近位端部90は、トリップブロック84に設けられたスロット94を通じて(図10A、C&Dも参照のこと)、フィードバー82下側に設けられたフック92と相互に接続されている(図38A&B)。スピンドル60によりフィードバー82を動かすことができるようにするため、スピンドル60にはトリップレバー96および付勢ばね98が設けられている。トリップレバー96は、本明細書の以下の箇所においてもっと詳しく説明されている仕方でフィードバー82の近位端部と係合することができる。
【0059】
ここに開示されているクリップ取付器10の一つの顕著な利点は、外科用クリップ取付器10の作動中にジョー16内に進行させ、且つ、外科用クリップ72を受け入れながらジョー16を離間した状態に維持することができるように構成されたウェッジプレート100が設けられていることである。ウェッジプレート100を通じて形成された、以降の箇所においてもっと詳しく説明されている、カムスロット136(図13)と細長い管状部材14の内部に取り付けられたフィラーコンポーネント102は、ウェッジプレート100をフィラーコンポーネント102およびジョー16に対して相対的に移動させるべく、スピンドル60に設けられたカムリンク104と連携して協同する。フィラーコンポーネント102は、ジョー16のすぐ後ろ側に位置付けられており、細長い管状部材14に対して相対的に移動しない。
【0060】
図10Aに戻って説明すると、上で記されているように、外科用クリップ72をジョー16内に移動させるため、フィードバー82が設けられている。フィードバー82はスピンドル60に設けられているトリップレバー96により駆動される(図10参照)。詳細には、フィードバー82は細長い窓106を備えており、この窓は、スピンドル60が遠位方向に駆動されたときに、トリップレバー96により係合されるべく構成されている。また、フィードバー82、本明細書の以下の箇所で説明されている如きロックアウト構造を受け入れるための窓286も含んでいる。ジョー16内へのクリップの挿入を容易化するため、フィードバー82はその遠位端部にプッシャー108を備えており、このプッシャーは、クリップ72の列から外れた個々のクリップ72をジョー16内に進行させることができるように構成されている。図10Bに示されているように、フォロワー74は、外科用クリップ取付器10を通じてクリップ72を進行させるべく、クリップの列の後ろ側に位置付けられている。図10Hに示されているように、フォロワー74は、クリップチャンネル70の遠位端部に配置された更なるロックアウト構造と係合するための突き合わせ面288を含んでいる。
【0061】
図10Cを参照しながら説明すると、上で記されているように、トリップブロック84は、フィードバー82のフック92を受け入れるためのスロット94を含んでいる。トリップレバー96を窓106から解放し、従って、フィードバー82からトリップレバー96を解放するため、トリップブロック84は角度形成面110を備えており、図10Dにおいて最も分かりやすく示されているように、この角度形成面は、トリップレバー96と係合し、且つ、フィードバー82の窓106からそのトリップレバーを解放することができるように構成されている。
【0062】
次に、図10E−10Gを参照し、スピンドル60の様々な機構部について以下で説明する。他のコンポーネントから単離されたスピンドル60の透視図が図10Eに示されている。特に図10Fを参照しながら説明すると、近位端部において、スピンドル60は、その近位端部でトリップレバー96を取り付けるためのピボットポイント112を含んでいる。さらに、スピンドル60には、トリップレバー96をフィードバー82の窓106との係合に向けて付勢させることができる付勢ばね98を取り付けるためのボス114が設けられている。角度形成面290は、スピンドル60をロックアウト構造と係合させ、最後のクリップがファイヤリングされた後にスピンドルが完全に引っ込められてしまうのを防ぐために設けられている。図10Gを参照しながら説明すると、スピンドル60は、カムリンク104を取り付けるためのボス116を遠位端部に備えている。さらに、スピンドル60は隆起機構部118を備えており、この隆起機構部は、以降の箇所において説明されている仕方でフィラーコンポーネント102をウェッジプレート100から解放する機能を果たす。
【0063】
図11を参照しながら説明すると、スピンドル60は、外科用クリップがジョー16内に位置付けられた後に外科用クリップの周りでジョー16を閉じるべく、ドライバー66をジョー16との係合に向けて進行させるために設けられている。スライダージョイント68の遠位端部120は、ドライバー66に設けられた凹部122内に位置付けられている。スライダージョイント68の近位突起部124は、スピンドル60の遠位端部に設けられた長手方向スロット126内に乗っている。長手方向スロット126の長さは、スピンドル60が、ドライバー66と係合し、クリップ72の周りでジョー16を閉じるべくドライバー66を長手方向に移動させる前に、予め定められた長手方向距離だけ移動することができるように成している。ラッチリトラクター128がスライダージョイント68に設けられたスロット130内に一体的に形成されており、これにより、ウェッジプレート100が以降の箇所においてもっと詳しく説明されている仕方で近位方向に後退することが可能になった後に、ドライバー66を遠位方向に駆動させることが可能になる。
【0064】
図12を参照しながら説明すると、クリップ取付器10は、最後のクリップ72が送給された後のクリップ取付器10の作動を防止するための新規なロックアウト機構を備えている。クリップ取付器10は、スピンドル60に設けられたチャンネル294内に移動可能に取り付けられているロックアウトウェッジ292を含んでいる。ロックアウトウェッジ292は、スピンドル60に設けられた角度形成面290に対してカム作動することができるように構成された角度形成面296を含んでいる。隆起した突起部298は、フィードバーが長手方向に動いている間、ロックアウトウェッジ292をフィードバー82に固定するため、フィードバー82に設けられた窓286と結合する。
【0065】
次に、図13を参照し、ウェッジプレート100についてもっと詳しく説明する。上で記されているように、ウェッジプレート100は、ジョー16内への外科用クリップ72の装填中、ジョー16を離間状態に付勢し、且つ、ジョー16をその状態に維持するために設けられている。さらに、ウェッジプレート100の存在は、外科用クリップ72の装填中にジョーが屈曲するのを防ぐべく、ジョー16に安定性を提供する。図示されているように、ウェッジプレート100は遠位先端部134を含んでおり、この遠位先端部は、ジョー16と係合してジョー16をカム作動により開き、それらのジョーを離間状態に維持することができるように構成されている。さらに、ウェッジプレート100はカムスロット136を含んでおり、このカムスロットは、以下でもっと詳細に検討されているように、スピンドル60に取り付けられたカムリンク104と協同してウェッジプレート100の動きを制御することができるように構成されている。さらに、フィラーコンポーネント102の柔軟性を有する構造と係合させるべく、それぞれ、遠位および近位窓138および140が設けられている。ウェッジプレート100を細長い管状部材14内において一般的に近位方向に付勢するため、マウント144に付勢ばね142が設けられている。最後に、ストッパー146は、フィラーコンポーネント102に設けられた対応する構造と係合することができるように構成されている。
【0066】
次に、図14および15を参照し、フィラーコンポーネント102の様々な側面についてここで説明する。フィラーコンポーネント102は可撓性脚152を含んでおり、この脚は、ウェッジプレート100の遠位および近位窓138および140と係合することができるように構成されている。また、フィラーコンポーネント102は、カムリンク104の一部を受け入れることができるように構成された細長いカムスロット148も含んでいる。ウェッジプレート100におけるカムスロット136内からのカムリンク104の解放を促進するため、解放用端部150がカムスロット148の内部に設けられている。フィラーコンポーネント102は、さらに、ウェッジプレート100の近位方向への後退を制限すべく、ウェッジプレート100に設けられたタング146と係合するためのストッパー154(図13)、ならびにウェッジプレート100の戻しばね142の長さを受け容れることができる長手方向の凹部156を含んでいる。
【0067】
図16および17は、回転ノブ20に対して相対的な衝撃ばね56の位置関係を描いている。上で記されているように、衝撃ばね56は、外科用クリップ取付器10の操作との関係において以下でもっと詳しく説明されている如く、外科用クリップ72のクリンピング中に生じるジョー16の過剰な圧縮を防ぐための過圧機構として設けられている。この過圧機構は、外科医師により加えられるトリガー18のオーバーストロークを防ぎ、結果としてジョー16の損傷を防ぐことができるように設計されている。
【0068】
図18−20を参照すると、スピンドル60および関連する駆動コンポーネントが、細長い管状部材14を取り除いた状態で示されている。詳細には、図19に関して説明すると、フィードバー82のプッシャー108が、外科用クリップ72と係合すべく、ノーズ80に設けられたスロット158を通じて延びている。同様に、図20に示されているように、スピンドル60の近位端部においては、トリップレバー96が、フィードバー82に設けられた窓106を通じて延びている。この位置で、トリップレバー96は、スピンドル60と共に細長い管状部材14を通じてフィードバー82を遠位方向に駆動すべく、スロット106のエッジと係合することができる。ロックアウトウェッジ292は、スピンドル60のチャンネル294内において長手方向に移動することができる。ロックアウトウェッジの突起部298は、フィードバー82に設けられた窓286と結合する。
【0069】
図21を参照すると、図19と同様な図が示されているが、チャンネル70に位置付けられた外科用クリップ72と係合しているプッシャー108を明示するため、ノーズ80は取り除かれている。チャンネルカバー78およびノーズ80をしっかりとチャンネル70上に保持するため、T字型のタブ300がチャンネル70に設けられている。
【0070】
次に、図22を参照すると、スピンドル60および関連するコンポーネントが、フィードバー82を取り除いた状態で示されている。
【0071】
図23を参照すると、スピンドル60の遠位端部に存在するジョー16へ供給するためにチャンネル70内に位置付けられた多数のクリップ72が描かれている。クリップ72は、チャンネル70内において長手方向に配列されている。フィードバー82によりジョー16内へ進められるまでチャンネル70内におけるクリップ72の積み重なり(stack)を拘束(restrain)するため、チャンネル70の遠位端部には保持フィンガー71が設けられている。チャンネル70に設けられたランス302は、フィードバー82の突き合わせ面288と係合することができるように構成されている。
【0072】
図24を参照すると、フォロワー74およびフォロワーばね76と共に組み立てられたスピンドル60の中間セクションが描かれている。既に記されているように、ばね76は、フォロワー74をスピンドル60に対して相対的に遠位方向に付勢している。
【0073】
図25を参照すると、トリップレバー96および付勢ばね98と共に組み立てられたスピンドル60が描かれており、トリップレバー96は、付勢ばね98により最も上方の位置へ向けて付勢されている。ロックアウトウェッジ292はチャンネル294内に位置付けられている。
【0074】
図26および27を参照すると、ジョー16の周りでドライバー66と共に組み立てられたスピンドル60の反対側の側面が描かれている。既に記されているように、ドライバー66は、外科用クリップの周りで閉じたジョー16をカム作動させることができるように構成されている。従って、ジョー16は、ドライバー66の対応するカム作動面184(図34)を受け入れるための角度の付いたカム作動面160を含んでいる。ジョー16の近位端部に設けられたポケット187(図31)は、ドライバー66の後退を制限する。詳細には、スライダージョイント68の突起部186がジョー16のポケット187と係合する(図31&34参照)。
【0075】
次に、図28−30を参照し、チャンネル70、トリップロック84、ウェッジプレート100およびフィラーコンポーネント102の組み立てられた相対的な位置関係について説明する。最初に図29および30を参照しながら説明すると、フィラーコンポーネント102はチャンネル70上に位置付けられている。フィラーコンポーネント102の近位端部はチャンネル70に配置されたストッパー162と隣接している。ウェッジプレート100は、図示されている仕方でフィラーコンポーネント102上に横たわっている。図30において最も分かりやすく示されているように、フィラーコンポーネント102はカムスロット148を含んでおり、このカムスロットは、カムスロット148内に形成された解放用エッジ150を有している。同様に、ウェッジプレート100はカムスロット136を含んでいる。上で記されているように、ウェッジプレート100を遠位方向に駆動するため、カムリンク104が、スピンドル60(図示せず)に取り付けられた状態で設けられている。ウェッジプレート100の駆動を容易化するため、カムリンク104はカムリンクボス164を備えており、このカムリンクボスは、それぞれ、ウェッジプレート100およびフィラーコンポーネント102のスロット136および148に乗っている。カムリンク104がウェッジプレート100に対して相対的に遠位方向に進められると、カムリンクボス164は、ウェッジプレート100を遠位方向に駆動すべく、ウェッジプレート100の駆動エッジ166と係合する。以降の箇所で説明されている仕方において、カムリンク104、詳細にはカムリンクボス164がフィラーコンポーネント102の解放用エッジ150と係合すると、カムリンクボス164は、駆動エッジ166の係合から外れ、カム作動される。
【0076】
図30を参照しながら説明すると、フィラーコンポーネント102は可撓性脚152を備えており、この脚は、ウェッジプレート100の、それぞれ、遠位および近位窓138、140の間で移動可能である。近位または遠位窓のうちの一つから外して可撓性脚152をカム作動させるため、可撓性脚152にはカム面168が設けられており、このカム面は、フィラーコンポーネント102に対するウェッジプレート100の相対的な動きに対応して、可撓性脚152をこれらの窓から外してカム作動させる。
【0077】
本明細書のこれまでの箇所で記されているように、ジョー16は、外科用クリップ72を受け入れ、且つ、そこに位置付けられた外科用クリップ72を圧搾するために設けられている。図31および32を参照しながら説明すると、ジョー16は、一般的に、ベース172に固定された一対の可撓性脚170を含んでいる。ジョー部材16Aおよび16Bは、可撓性脚170の遠位端部に配置されている。一対のロッキングアーム174がベース172から遠位方向に延びており、タブ176で終結している。タブ176は、ジョー16を細長い管14に確保するため、細長い管14(図10)に設けられた対応する穴177と係合することができるように構成されている。ジョー16は、外科用クリップ72を受け入れるためのチャンネル22を含んでいる。既に記されているように、フィラーコンポーネント102は、ジョー16のすぐ後ろ側に位置付けられており、ジョー16と共に、外側管状部材14に対して相対的に長手方向に移動しない。
【0078】
差し当たり図32を参照しながら説明すると、ジョー16は、ウェッジプレート100の遠位先端部134が、最初に、ジョーセクション16aおよび16bを分離し、その後、ジョー16内への外科用クリップの挿入中に、それらのジョーセクションを、分離され、且つ、整列された配置に維持するために使用されるような仕方でウェッジプレート100を受け入れることができるように構成されている。既に記されているように、これは、外科用クリップ72をそれらのジョーの間に装填しているときに、ジョー16bに対して相対的なジョー16aのあらゆる捻れまたは屈曲が起こるのを防ぐ。柔軟性を有するそれぞれの脚170は、ウェッジプレート100の遠位先端部134をジョー16内へ誘導するためのカムエッジ178(図44&63参照)を含んでいる。
【0079】
図33を参照すると、ラッチリトラクター128がウェッジプレート100のスロット182を通じて延びるような仕方でスピンドル60に位置付けられたウェッジプレート100が描かれている。ウェッジプレート100が取り除かれた状態で図34において最も分かりやすく示されているように、ドライバー60の遠位先端部はカム作動面184を備えているのが分かる。カム作動面184は、ジョー16に対して相対的なドライバー60の長手方向の動きに対応してこれらのジョー16を一緒にカム作動させるべく、ジョー16に設けられたカム面160と協同する(図27参照)。スライダージョイント68の突起部186は、ジョー16に対するスライダージョイント68の相対的な後退を制限するため、ウェッジプレート100に設けられたスロット188を通じて延びている。
【0080】
次に、標的組織、例えば脈管などの周りで外科用クリップを圧搾するための外科用クリップ取付器10の操作について説明する。図35および36を参照しながら説明すると、トリガー18はラック202で総体的に圧縮されていない状態にあり、従って、スピンドル60は戻しばね208により最も近位側の位置へ付勢されている。さらに、アクチュエータ242は、カウンターレバー244をカウンター246から離れた状態に保持する最も近位側の位置にある。歯止め212は、ラック202に設けられた遠位凹部228に位置付けられている。図37−42において最も分かりやすく示されているように、先ず、図38を参照しながら説明すると、ファイヤリングされていない状態では、スピンドル60により担持され、且つ、付勢ばね98により上向きに付勢されたトリップレバー96は、フィードバー82に設けられたスロットに隣接し、且つ、そのスロットと接触した状態で位置付けられている。トリップブロック84は、トリップレバー96に対して相対的に遠位側の位置にある。フィードバー82に固定されたロックアウトウェッジは近位側の位置にある。
【0081】
図39を参照しながら説明すると、フォロワー74は、クリップ72が遠位方向に付勢されるような仕方で、ばね76により遠位側に付勢されている。
【0082】
図40を参照しながら説明すると、スピンドル60およびフィードバー82は、上向きの位置に付勢されているラッチリトラクター128により静止状態にある。
【0083】
図41を参照しながら説明すると、フィラーコンポーネント102の可撓性脚152は、ウェッジプレート100の遠位窓138内にある。スピンドル60に設けられた隆起機構部118は、可撓性脚152の近位側にある。
【0084】
図42において最も分かりやすく示されているように、外科用クリップ取付器10の遠位端部では、ファイヤリングされていない状態で休止している場合、ウェッジプレート100およびフィードバー82は、ジョー16に対して相対的に最も近位側の位置にある。プッシャー108はランス302の遠位側にある(図42A)。
【0085】
図43−47は、ウェッジプレート100、ジョー16およびフィラーコンポーネント102の休止位置における初期状態を描いている。
【0086】
最初に図43および44を参照すると、図示されているように、ウェッジプレート100は、ジョー16に対して相対的に最も近位側の位置にある。図43に示されているように、可撓性脚152はウェッジプレート100の遠位窓138内にあり、一方、カムリンク104は、ウェッジプレート100に設けられたカムスロット136に対して相対的に最も近位側の位置にある。
【0087】
図45および46において最も分かりやすく示されているように、ウェッジプレート100は、遠位先端部134がジョー16のカムエッジ178の近位側にある状態で、ジョー16に対して相対的に最も近位側の位置にある。
【0088】
図47を参照しながら説明すると、ウェッジプレート100は、ウェッジプレート100の駆動エッジ166がフィラーコンポーネント102の解放用エッジ150の近位側にあるような仕方で、フィラーコンポーネント102に対して相対的に最も近位側の位置にある。
【0089】
図48を参照しながら説明すると、クリップ取付器10の作動を開始させるため、トリガー18が初期スイング(swing)により動かされ、ウィッシュボーン型リンク204がラック202を遠位方向に駆動し、これにより、スピンドル60が遠位方向に駆動される。アクチュエータ242は、ピン206がアクチュエータ242に設けられた駆動スロット252を通じて移動するため、最も近位側の位置に留まったままである。差し当たり図50を参照しながら説明すると、もしトリガー18がこの時点で放たれる場合、ラック歯226は、近位方向の動きに抗じて歯止め歯222を拘束し、トリガー18の解放および外科用クリップ取付器10の部分的な作動または不注意による部分的な作動を防止するであろう。
【0090】
初期ストロークの間、スピンドル60は、予め定められた距離だけ移動する。図51を参照しながら説明すれば、スピンドル60が初期遠位方向距離だけ駆動されると、トリップレバー96がフィードバー82の細長い窓106と係合し、同様な距離だけフィードバー82を遠位方向に移動させる。ロックアウトウェッジ292は、フィードバー82により遠位方向に運ばれる。図42&51に示されているように、フィードバー82が遠位方向に駆動され、且つ、クリップ72がジョー16内へ送り込まれると、フォロワー74は、ばね76の付勢により遠位方向に移動し(図52)、外科用クリップ72の積み重なりを遠位方向に押しやる。
【0091】
図49を参照しながら説明すれば、ラック202が遠位方向に移動すると、歯止め212は、歯止め歯222が遠位凹部228から外れて移動してラック歯226上に乗り始めるような仕方で、時計方向に回転する。
【0092】
図53および54を参照しながら説明すれば、スピンドル60およびフィードバー82が遠位方向に移動すると、スピンドル60は、カムリンク104に設けられたカムリンクボス164がウェッジプレート100と係合するような仕方で、カムリンク104を初期距離だけ遠位方向に駆動する。図示されているように、フィラーコンポーネント102の可撓性脚152は、ウェッジプレート100の最遠位窓138内に位置付けられる。
【0093】
図55に示されているように、カムリンク104がスピンドル60と共に遠位方向に移動すると、カムリンクボス164が、ウェッジプレート100をフィラーコンポーネント102に対して相対的に遠位方向に駆り立てるべく、ウェッジプレート100に設けられた駆動エッジ166と係合する。
【0094】
図56を参照しながら説明すれば、フィードバー82が遠位方向に移動すると、フィードバー82の遠位端部に設けられたプッシャー108がクリップ72と係合し、クリップ72をジョー16内に駆り立て始める。注目すべきことに、この時点では、スピンドル60はまだドライバー66と接触しておらず、これにより、外科用クリップ72が完全に挿入される前にジョー16を圧縮することが防止されている。
【0095】
再び図55に戻って説明すれば、外科用クリップ取付器10が更なる第二の予め定められた距離を通じて作動されると、カムリンク104に設けられたカムボス164は、ウェッジプレート100を引き続き遠位方向に駆動し、可撓性脚152は、遠位窓138から外れてカム作動され、フィラーコンポーネント102を伴うウェッジプレート100と係合すべく、カム面168により近位窓140内へ送られる。図57&58に示されているように、この時点で、フィードバー82、ウェッジプレート100、スピンドル60、クリップ72およびフォロワー74(図52)は、すべて、最も遠位側の位置に動いている。
【0096】
図59を参照しながら説明すると、フィードバー82は、クリップ72をジョー16のチャンネル22内へ押しやるべく、フィードバー82の遠位端部に設けられたプッシャー108を外科用クリップ72に向けて駆り立て続ける。チャンネル70内の外科用クリップ72はフォロワー74により遠位方向に付勢され(図52)、ウェッジプレート100(図54)は、ドライバー66が細長い管状部材14に対して相対的に静止した状態のまま、遠位方向に移動し続ける。
【0097】
図60を参照しながら説明すれば、スピンドル60がさらに移動されると、カムリンク104のカムボス164は、図60の矢印により最も分かりやすく示されているように、フィラーコンポーネント102に形成された解放用エッジ150によって、ウェッジプレート100の駆動エッジ166との係合から外れてカム作動される。この更なる予め定められた距離のストロークの間、フィラーコンポーネント102の可撓性脚152はウェッジプレート100の近位窓140内に嵌り込んでおり、これにより、ウェッジプレート100は最も遠位側の位置から後退することが防止される。
【0098】
図61に示されているように、可撓性脚152はウェッジプレート100の近位窓140内に位置付けられており、これにより、フィードバー82およびスピンドル60が、矢印で示されているように遠位方向に移動し続けている間、ウェッジプレート100を引っ込められた状態に拘束している。
【0099】
図62−63に示されているように、ウェッジプレート100の遠位先端部134は、ジョー16aおよび16bに設けられたカム面178と係合することにより、ジョー部材16aおよび16bを離れる方向に駆り立てる。上で記されているように、ウェッジプレート100をジョー部材16aおよび16bのカム面178に位置付けることにより、ウェッジプレート100は、外科用クリップ72を適切に受け入れるべくジョー16を離れた状態に広げるだけでなく、さらに、個々のジョー部材16aおよび16bのそれぞれが相互関係において屈曲するのを抑えており、これにより、クリップがジョー16内に挿入されるときに生じるクリップ72のあらゆるトルクを防いでいる。
【0100】
図64を参照しながら説明すると、上で記されているように、可撓性脚152は、カムリンク104がフィラーコンポーネント102およびウェッジプレート100のスロット148および136を通じて進行し続けている間(図64)、ウェッジプレート100が近位側に後退するのを抑えている。
【0101】
図65において最も分かりやすく示されているように、スピンドル60がそのストロークを通じて遠位方向に移動し続けると、トリップレバー96は、トリップレバー96がトリップブロック84のカム作動面110(図10D参照)と係合するまで、スピンドル60と共に遠位方向に駆り立てられる。トリップブロック84のカム作動面110(図10D)がトリップレバー96に向けて駆り立てられると、トリップレバー96はフィードバー82の細長い窓106との係合から外れてカム作動され、このため、フィードバー82は、フィードバーばね88(図10参照)の付勢により、近位側の位置へ戻ることが可能になる。
【0102】
差し当たり図66を参照しながら説明すれば、スピンドル60がそのストロークを通じて移動し続けると、スピンドル60に設けられている隆起機構部118は、ウェッジプレート100の近位窓140から外れて、可撓性脚152をカム作動し始め、従って、ウェッジプレート100は外科用クリップ72がジョー16の間に圧搾される前に後退することができるようになり、外科用クリップ72がジョー16の間に圧搾される。この状態は図67において最も分かりやすく描かれており、そこでは、フィードバー82がクリップ72をジョー16内に完全に挿入しており、ウェッジプレート100は最も近位側の位置へ戻っている。
【0103】
図68は、フィードバー82がトリップレバー96から解放され、且つ、フィードバー82が近位方向に後退し始めることができるように、トリップレバー96のカム作動面110により、且つ、付勢ばね98の付勢に抗じて、フィードバー82との係合から外れてカム作動されているトリップレバー96を描いている。図69に示されているように、ジョー16内に挿入されたクリップ72を残してウェッジプレート100が後退すると、フィードバー82のプッシャー108は、次の最も遠位側に位置するクリップ72の後ろ側の近位側位置へ引っ込められる。
【0104】
図69Aを参照しながら説明すれば、トリガー18が圧縮し続けられると、ピン206は、ピン206が駆動スロット252の遠位端部304と係合するまで、アクチュエータ242に設けられた駆動スロット252内において遠位方向に進行する。その後、トリガー18がさらに圧縮されると、ピン206はアクチュエータ242を遠位方向に移動させる。トグルアーム244に設けられたピン264は接続用スロット254内において時計方向に回転し、これにより、トグルアーム244に設けられた接触アーム268を作動機構部248に向けて駆動する。
【0105】
図70を参照しながら説明すると、トリップレバー96はトリップブロック84のカム面110により完全に下向きにカム作動され、スピンドル60は更なる予め定められたストロークを通じて遠位方向に移動し続ける。
【0106】
差し当たり図71を参照しながら説明すれば、スピンドル60が遠位方向に移動し続けている間にウェッジプレート100が近位方向に引っ込められると、フィラーコンポーネント102に設けられた可撓性脚152はウェッジプレート100の遠位窓138内に嵌り込む。図72に示されているように、ウェッジプレート100は、ジョー16に対して相対的に近位側の位置へ引っ込められる。
【0107】
図73を参照しながら説明すれば、ラッチリトラクター128がスピンドル60に対して相対的に下向きにカム作動されると、スピンドル60は、予め定められた距離だけ遠位方向に移動する。スピンドル60の活動は、次に、ドライバー66と係合し、ドライバー66を遠位方向に押しやる。ドライバー66はスライダージョイント68を引き込み、同時的に、スライダージョイント68はラッチリトラクター128を遠位方向に引っ張って機械的にラッチリトラクター128のカム面をジョーパッド172の下側へ下向きに押しやり、ラッチリトラクター128をスピンドル60のスロット126と係合させる。
【0108】
図74−75を参照しながら説明すれば、トリガー18がスピンドル60を最も遠位側の位置へ駆動すべく充分に圧縮されると、トリガー18の圧縮が完了し、且つ、クリップ72が完全に形成されたときに、図74を参照しながら説明すれば、カウンターレバーが時計方向に充分に回転されてバンパー268をカウンターボタン248に向けて駆動し、これにより、カウンター246により表示される数字がインクリメントされる。
【0109】
以前の箇所において記されているように、カウンター246で示されている数字のインクリメントは、初めに外科用ステープラー10内に含まれていた外科用クリップ72の総数から減らされる方向であってよく、または外科用器械10により送給されたクリップの個数を指示すべくカウントアップされてもよい。
【0110】
差し当たり図75を参照しながら説明すれば、外科用器械10がすべてのクリップをファイヤリングすると、歯止め歯222は、ラック歯226から解放され、近位凹部230内に位置付けられる。注目すべきことに、クリップ72が初期位置からジョー16内に完全に挿入された位置に来るまでにはスピンドル60のフルストロークが必要である。スピンドル60がその最も遠位側の位置を通じて移動すると、スピンドルは、外科用クリップ72を圧搾すべく、本明細書の以前の箇所において説明されている仕方でドライバー66を移動させる。例えば、図76−79を参照しながら説明すると、ドライバー66は、ドライバー66に設けられたカム作動面184がジョー16aおよび16bをカム作動によって閉じ、これにより、それらのジョーの間に含まれている外科用クリップ72を閉じるような仕方で、ジョー16aおよび16bに設けられたカム作動面160に対して相対的に遠位方向に進行する。
【0111】
差し当たり図80を参照しながら説明すると、オーバーストローク状態を防ぎ、これにより、クリップ72の過剰な圧縮が組織、ジョー16またはドライバー66を損傷することを防止するため、安全機構が設けられている。もしトリガー18がクリップ72の完全な形成に必要なストロークを通り越して絞られ続けると、衝撃ばね56がノブ20およびブッシング48の間で定められたスペース内で圧縮し、これにより、スピンドル60の更なる遠位方向への動きが防止される。
【0112】
脈管Vの周りで形成された完全な形成形態のクリップが図81に描かれている。
【0113】
図82を参照しながら説明すれば、トリガー18が放されると(図示せず)、歯止め212は、歯止め歯222が、本ハンドルアセンブリをリセットすべく、ラック歯226に沿って乗るような仕方で、歯止めばね216の付勢に抗じて反時計方向に回転する。図83に示されているように、ドライバー66が後退すると、ラッチリトラクター128はその最も上方の位置に向けて上向きに再び付勢され、これにより、本駆動機構がリセットされる。
【0114】
図84−86を参照しながら説明すれば、スピンドル60が後退すると、スピンドル60の隆起機構部118は、フィラーコンポーネント102の可撓性脚152を通り越して移動する。ウェッジプレート100は、既に充分に引っ込められているため、移動しないことに留意すべきである。スピンドル60が後退すると、スピンドルは、カムリンク104を、ウェッジプレート100およびフィラーコンポーネント102のスロット136および148内において、その初期位置まで近位方向に引っ張る。図86において最も分かりやすく示されているように、この位置においては、クリップ取付器10は、再度ファイヤリングされるべく、従って、脈管に別のクリップを取り付けるべく、再び初期位置にある。
【0115】
次に図87から89までを参照し、最初に図87を参照しながら説明すれば、すべての外科用クリップ72が外科用クリップ取付器10から放出されると、フォロワー74は、突き合わせ面288がチャンネル70に設けられたランス302と係合するような仕方で最も遠位側の位置にあり、これにより、フォロワー74の近位方向に向けた引っ込みがロックアウトされ、または防止される。図示されているように、フィードバー82に設けられたプッシャー108は、後退時にフォロワー74と係合し、フィードバー82が近位方向に後退することができないような仕方で、ノーズ80およびフォロワー74の間に割り込む。
【0116】
図88に示されているように、フィードバー82が最も遠位側の位置に拘束されているため、フィードバー82に固定されているロックアウトウェッジ292も最も遠位側の位置に拘束されている。従って、スピンドル60が近位方向に後退しようとすると、ロックアウトウェッジ292に設けられた角度形成面296がスピンドル60の角度形成面290と係合し、これにより、スピンドル60の更なる後退が防止される。
【0117】
図89を参照しながら説明すると、スピンドル60が近位方向に完全に後退することができないため、ラック202は近位方向に完全に後退することができない。ラック歯226は歯止め歯222と係合し、歯止め212が遠位凹部228内へ戻るような仕方で回転するのを防いでおり、これにより、クリップ取付器10のリセットが防止されている。このようにして、クリップ取付器10は、最後の外科用クリップ72が送給された後に為されるあらゆる更なるファイヤリング試行が完全にロックアウトされている。歯止め歯222およびラック歯226が本駆動機構のあらゆる遠位方向の運動を防止しているため、特に、トリガー18は、さらに絞られることが防止されている。
【特許請求の範囲】
【請求項1】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリ;
e)外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記ハンドル部分と連合したカウンター機構であって、該ハンドル部分の作動に対応して指標を与えるカウンター機構;
を含む、外科用クリップ取付器。
【請求項2】
前記カウンター機構が液晶ディスプレイを含む、請求項1記載の装置。
【請求項3】
前記カウンター機構がバックライトを含む、請求項1記載の装置。
【請求項4】
前記カウンター機構は、該ハンドル部分の完全作動時に指標が与えられる、請求項1記載の装置。
【請求項5】
前記カウンター機構が該アクチュエータによりトリガーされる、請求項1記載の装置。
【請求項6】
前記カウンター機構は該ハンドル内にあって該アクチュエータに接続されており、該カウンター機構は該アクチュエータに接続されたある部材を有しており、ここで、該カウンター機構はディスプレイ接触子を備えた液晶ディスプレイを有しており、該ディスプレイ接触子は、前記部材が該ディスプレイ接触子と接触したときに作動される、請求項5記載の装置。
【請求項7】
前記部材が回転可能であり、該部材が、前記ディスプレイ接触子と接触させるべく、該アクチュエータの長手方向の動きに対応して回転する、請求項6記載の装置。
【請求項8】
前記カウンター機構がレンズを有する液晶ディスプレイであり、該液晶ディスプレイはある画像を表示し、該レンズが該画像を拡大する、請求項1記載の装置。
【請求項9】
前記アクチュエータが開口を含み、前記カウンター機構が第一アームおよび第二アームを伴う前記部材を有しており、該第一アームは該開口に接続されており;
ここで、該アクチュエータが遠位方向に向けて長手方向に移動したときに、該アクチュエータは該第一アームを偏向させ、前記部材が該動きに対応して回転し;そして
前記第二アームは該部材の該回転に対応して前記ディスプレイ接触子と接触し、該ディスプレイ接触子は、前記第二アームが該ディスプレイ接触子と接触したときに作動される;
請求項6記載の装置。
【請求項10】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;および
h)前記複数のクリップが実質的に使い果たされたときに、組織への該外科用クリップの適用を防止すべく、前記クリッププッシャーと係合することができるように構成されているロックアウト機構;
を含む、外科用クリップ取付器。
【請求項11】
前記ロックアウト機構がある部材を有しており、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり、ここで、該部材が該最も遠位側の位置に達したときに、該部材は前記クリッププッシャーと係合し、該部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている、請求項10記載の装置。
【請求項12】
さらに、クリップフォロワーを含み、該クリップフォロワーは、前記本体の内部に配置された該複数のクリップを遠位方向に付勢しており;
ここで、前記ロックアウト機構はある部材を含んでおり、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり;
前記部材が該最も遠位側の位置に達したときに、該部材は前記フォロワーと係合し、該部材により、該フォロワーが近位方向に後退することが防止されており;
該クリッププッシャーが後退すると、該クリッププッシャーは前記フォロワーと係合し、ここで、前記部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている;
請求項10記載の装置。
【請求項13】
前記部材がロックアウトウェッジである、請求項11記載の装置。
【請求項14】
前記部材がロックアウトウェッジである、請求項12記載の装置。
【請求項15】
前記部材が少なくとも一つの部材角度形成面を有しており、また、前記アクチュエータが少なくとも一つのアクチュエータ角度形成面を有しており、ここで、該アクチュエータが近位方向に後退すると、該少なくとも一つのアクチュエータ角度形成面が該部材角度形成面と係合し、該係合により、該アクチュエータが最も近位側の位置の近位側に後退することが防止されている、請求項12記載の装置。
【請求項16】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
h)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
i)前記アクチュエータに結合されている複数のラチェット歯を有するラック;および
j)前記ラチェット歯と係合することができるように構成されている少なくとも一つの歯を有する歯止めであって、該歯止めは前記ハンドル部分内において付勢されており、ここで、該アクチュエータが長手方向に移動されると、前記複数のラチェット歯は該歯止め上を通り越し、該歯止めは、当該装置が完全作動する前に生じる該アクチュエータの不慮の戻りを防止することができるように構成されている、歯止め;
を含む、外科用クリップ取付器。
【請求項17】
前記歯止めが歯止めばねにより付勢されており、ここで、該歯止めばねが歯止めを前記ラックとの係合に向けて付勢している、請求項16記載の装置。
【請求項18】
さらに、前記ハンドル部分の内側に接続された第一および第二の支柱を含んでおり、該第一および第二の支柱が前記歯止めばねを支持することができるように構成されている、請求項17記載の装置。
【請求項19】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)該ジョー部分を前記近接配置位置へ移動させるため、前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、ここで、該本体部分がある外径を有しており、また、前記ジョーアセンブリは該離間配置位置においてある幅を有しており;ここで、該幅が該本体の該外径未満であるか、該外径に等しい、ジョー閉鎖部材;
を含む、外科用クリップ取付器。
【請求項20】
前記本体がある長さを有しており、該長さが肥満症治療手術における使用を容易化するのに適した長さである、請求項19記載の装置。
【請求項21】
前記長さが30センチメートルより長い、請求項20記載の装置。
【請求項1】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリ;
e)外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記ハンドル部分と連合したカウンター機構であって、該ハンドル部分の作動に対応して指標を与えるカウンター機構;
を含む、外科用クリップ取付器。
【請求項2】
前記カウンター機構が液晶ディスプレイを含む、請求項1記載の装置。
【請求項3】
前記カウンター機構がバックライトを含む、請求項1記載の装置。
【請求項4】
前記カウンター機構は、該ハンドル部分の完全作動時に指標が与えられる、請求項1記載の装置。
【請求項5】
前記カウンター機構が該アクチュエータによりトリガーされる、請求項1記載の装置。
【請求項6】
前記カウンター機構は該ハンドル内にあって該アクチュエータに接続されており、該カウンター機構は該アクチュエータに接続されたある部材を有しており、ここで、該カウンター機構はディスプレイ接触子を備えた液晶ディスプレイを有しており、該ディスプレイ接触子は、前記部材が該ディスプレイ接触子と接触したときに作動される、請求項5記載の装置。
【請求項7】
前記部材が回転可能であり、該部材が、前記ディスプレイ接触子と接触させるべく、該アクチュエータの長手方向の動きに対応して回転する、請求項6記載の装置。
【請求項8】
前記カウンター機構がレンズを有する液晶ディスプレイであり、該液晶ディスプレイはある画像を表示し、該レンズが該画像を拡大する、請求項1記載の装置。
【請求項9】
前記アクチュエータが開口を含み、前記カウンター機構が第一アームおよび第二アームを伴う前記部材を有しており、該第一アームは該開口に接続されており;
ここで、該アクチュエータが遠位方向に向けて長手方向に移動したときに、該アクチュエータは該第一アームを偏向させ、前記部材が該動きに対応して回転し;そして
前記第二アームは該部材の該回転に対応して前記ディスプレイ接触子と接触し、該ディスプレイ接触子は、前記第二アームが該ディスプレイ接触子と接触したときに作動される;
請求項6記載の装置。
【請求項10】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;および
h)前記複数のクリップが実質的に使い果たされたときに、組織への該外科用クリップの適用を防止すべく、前記クリッププッシャーと係合することができるように構成されているロックアウト機構;
を含む、外科用クリップ取付器。
【請求項11】
前記ロックアウト機構がある部材を有しており、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり、ここで、該部材が該最も遠位側の位置に達したときに、該部材は前記クリッププッシャーと係合し、該部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている、請求項10記載の装置。
【請求項12】
さらに、クリップフォロワーを含み、該クリップフォロワーは、前記本体の内部に配置された該複数のクリップを遠位方向に付勢しており;
ここで、前記ロックアウト機構はある部材を含んでおり、該部材は最も遠位側の位置へ向けて該アクチュエータと共に長手方向に移動可能であり;
前記部材が該最も遠位側の位置に達したときに、該部材は前記フォロワーと係合し、該部材により、該フォロワーが近位方向に後退することが防止されており;
該クリッププッシャーが後退すると、該クリッププッシャーは前記フォロワーと係合し、ここで、前記部材により、該クリッププッシャーが該外科用クリップを前記ジョーアセンブリへ向けて遠位方向に進行させることが防止されている;
請求項10記載の装置。
【請求項13】
前記部材がロックアウトウェッジである、請求項11記載の装置。
【請求項14】
前記部材がロックアウトウェッジである、請求項12記載の装置。
【請求項15】
前記部材が少なくとも一つの部材角度形成面を有しており、また、前記アクチュエータが少なくとも一つのアクチュエータ角度形成面を有しており、ここで、該アクチュエータが近位方向に後退すると、該少なくとも一つのアクチュエータ角度形成面が該部材角度形成面と係合し、該係合により、該アクチュエータが最も近位側の位置の近位側に後退することが防止されている、請求項12記載の装置。
【請求項16】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、該ジョー部分を前記近接配置位置へ移動させることができるジョー閉鎖部材;
h)前記第一および第二のジョー部分の間で長手方向に移動可能なウェッジプレート;
i)前記アクチュエータに結合されている複数のラチェット歯を有するラック;および
j)前記ラチェット歯と係合することができるように構成されている少なくとも一つの歯を有する歯止めであって、該歯止めは前記ハンドル部分内において付勢されており、ここで、該アクチュエータが長手方向に移動されると、前記複数のラチェット歯は該歯止め上を通り越し、該歯止めは、当該装置が完全作動する前に生じる該アクチュエータの不慮の戻りを防止することができるように構成されている、歯止め;
を含む、外科用クリップ取付器。
【請求項17】
前記歯止めが歯止めばねにより付勢されており、ここで、該歯止めばねが歯止めを前記ラックとの係合に向けて付勢している、請求項16記載の装置。
【請求項18】
さらに、前記ハンドル部分の内側に接続された第一および第二の支柱を含んでおり、該第一および第二の支柱が前記歯止めばねを支持することができるように構成されている、請求項17記載の装置。
【請求項19】
身体組織へ外科用クリップを取り付けるための装置であって、該装置が:
a)ハンドル部分;
b)前記ハンドル部分から遠位方向に延び、且つ、長手方向軸を定めている本体;
c)前記本体の内部に配置された複数の外科用クリップ;
d)該本体の遠位端部に隣接して取り付けられたジョーアセンブリであって、離間配置位置と近接配置位置との間で移動可能な第一および第二のジョー部分を含むジョーアセンブリ;
e)前記ジョー部分が該離間配置位置にある間に、外科用クリップを前記ジョーアセンブリに向けて個別的に遠位方向に進行させることができるように構成されているクリッププッシャー;
f)少なくとも部分的に前記本体の内部に配置され、且つ、前記ハンドル部分の作動に対応して長手方向に移動可能なアクチュエータ;
g)該ジョー部分を前記近接配置位置へ移動させるため、前記第一および第二のジョー部分に隣接して配置されたジョー閉鎖部材であって、ここで、該本体部分がある外径を有しており、また、前記ジョーアセンブリは該離間配置位置においてある幅を有しており;ここで、該幅が該本体の該外径未満であるか、該外径に等しい、ジョー閉鎖部材;
を含む、外科用クリップ取付器。
【請求項20】
前記本体がある長さを有しており、該長さが肥満症治療手術における使用を容易化するのに適した長さである、請求項19記載の装置。
【請求項21】
前記長さが30センチメートルより長い、請求項20記載の装置。
【図1】


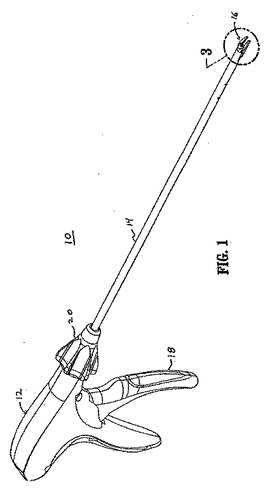
【図2】
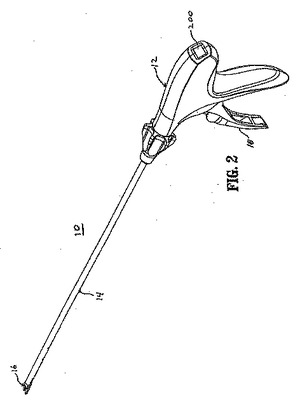
【図3】
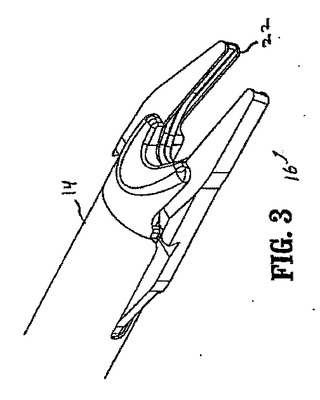
【図4】
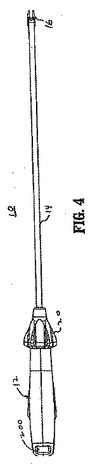
【図5】
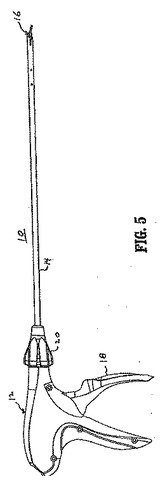
【図6】
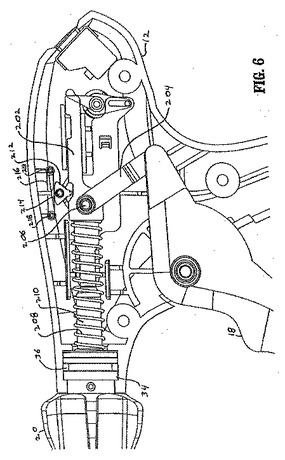
【図6A】
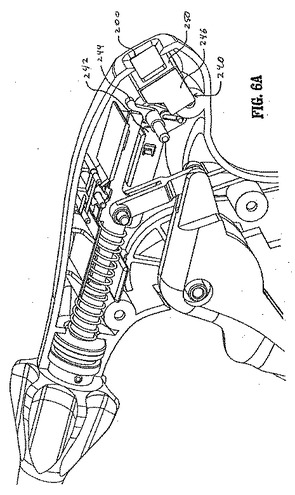
【図6B】
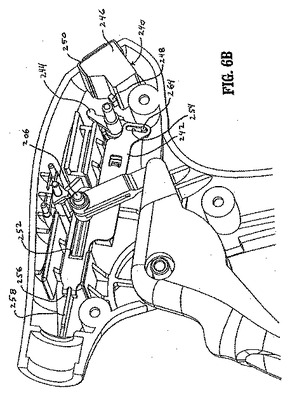
【図6C】
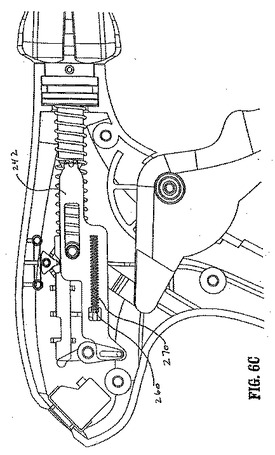
【図6D】
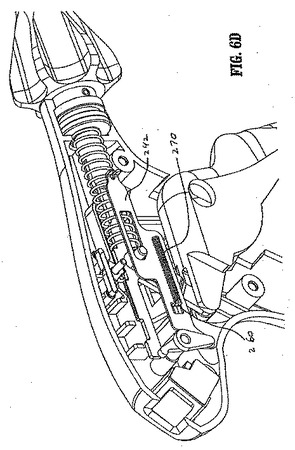
【図7】
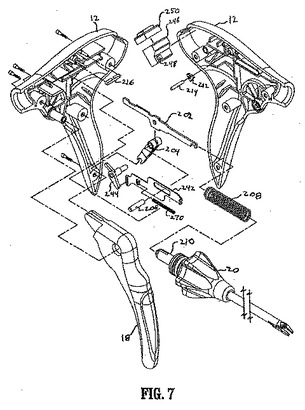
【図7A】
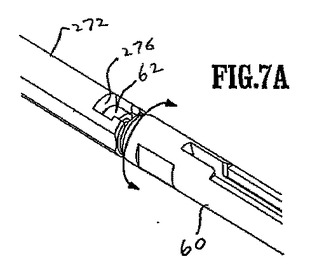
【図7B】
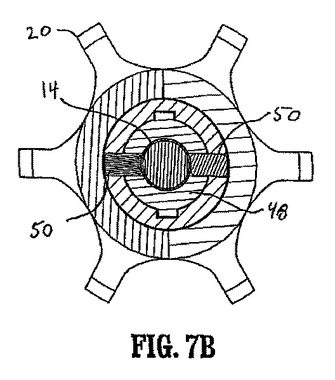
【図7C】
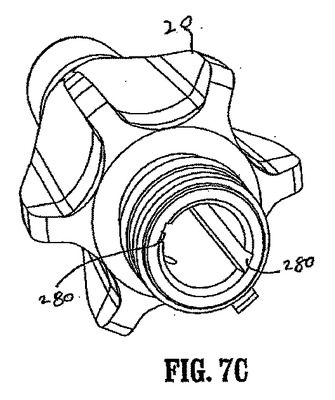
【図7D】
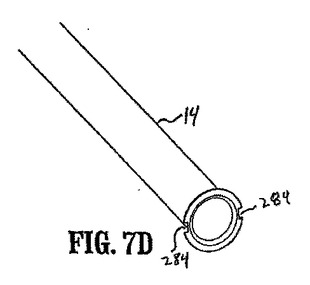
【図7E】
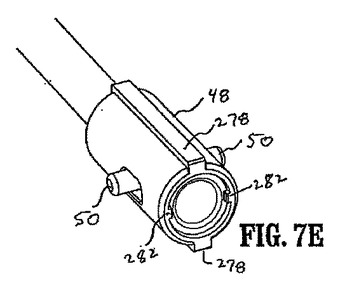
【図8】
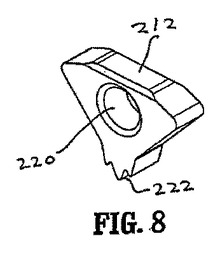
【図9】
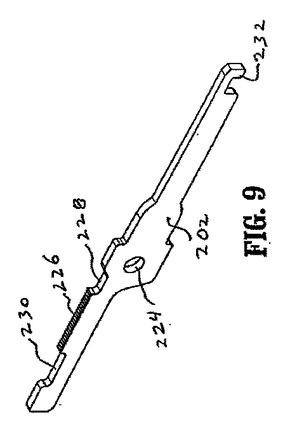
【図9A】
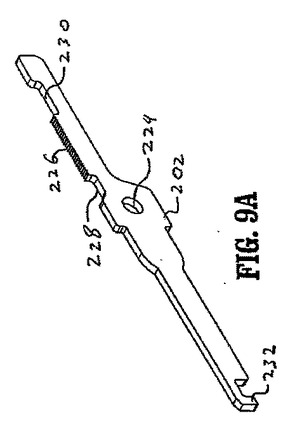
【図9B】
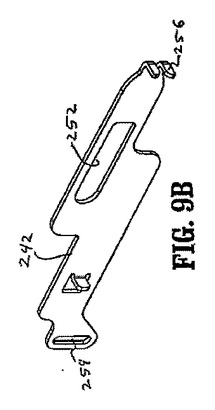
【図9C】
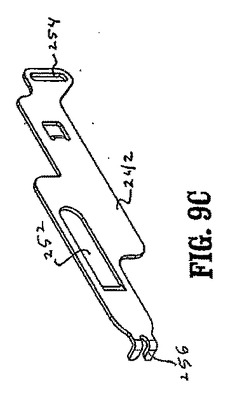
【図9D】
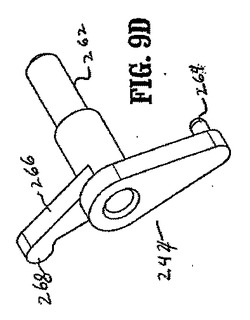
【図9E】
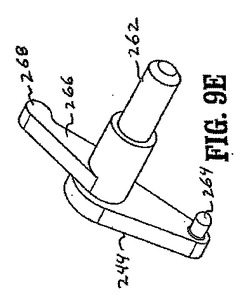
【図9F】
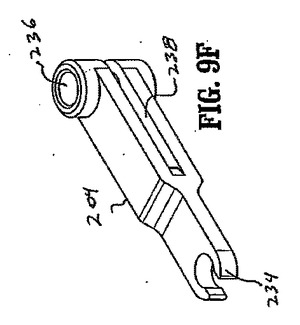
【図9G】
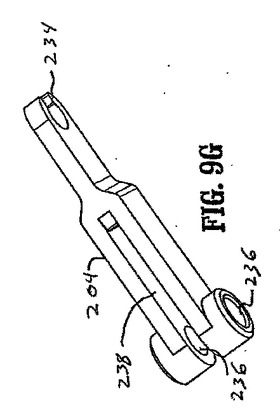
【図10】
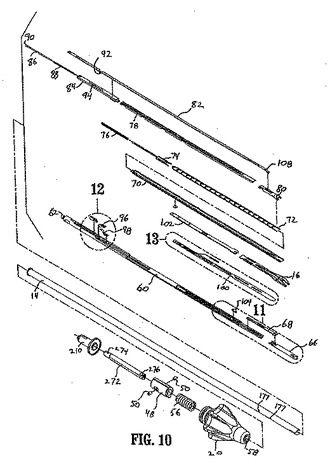
【図10A】
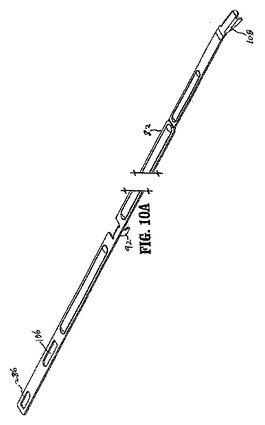
【図10B】
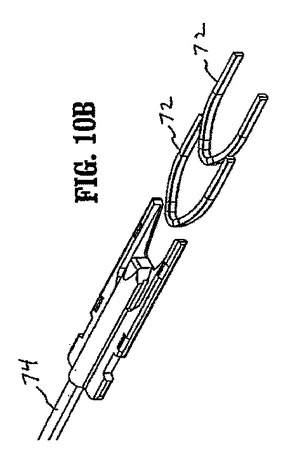
【図10C】
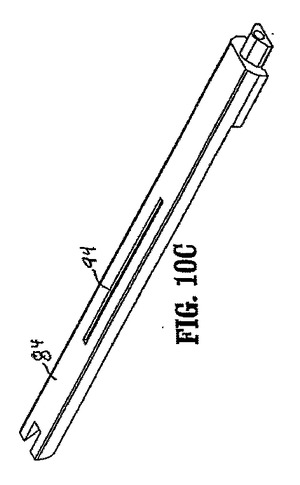
【図10D】
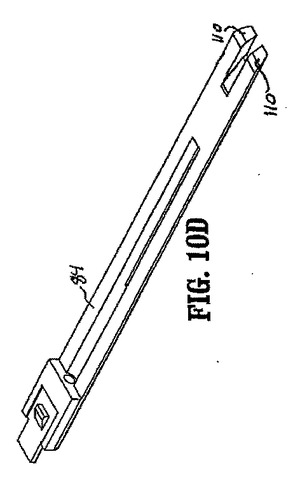
【図10E】
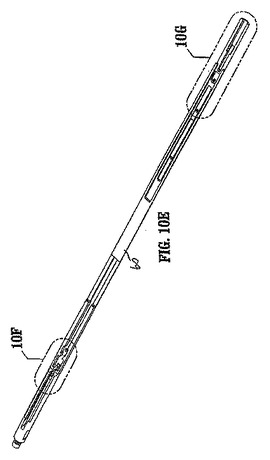
【図10F】
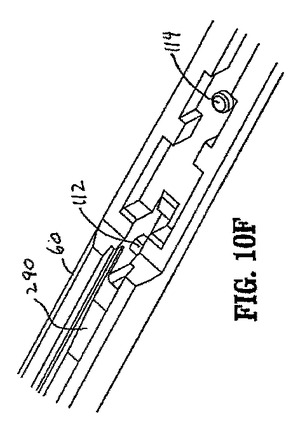
【図10G】
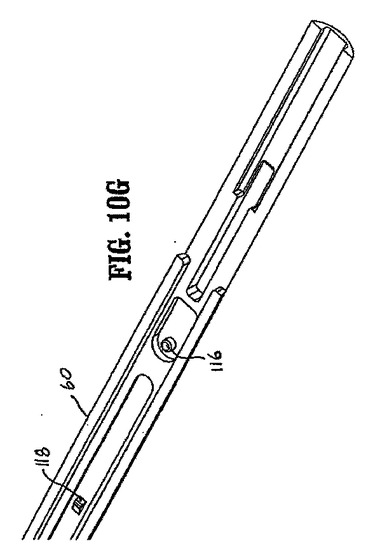
【図10H】
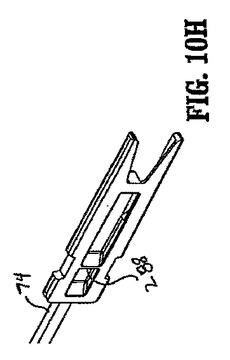
【図11】
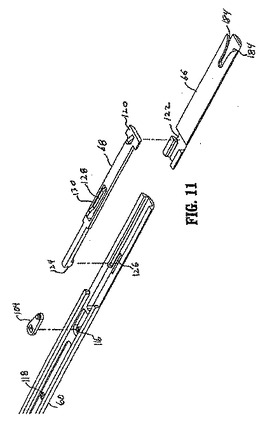
【図12】
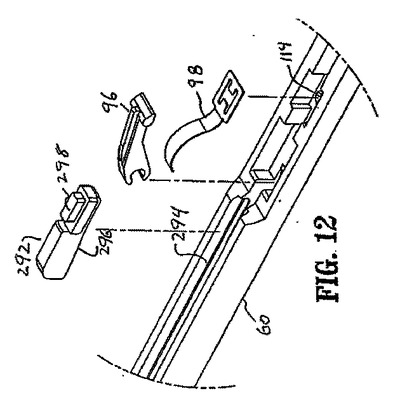
【図13】
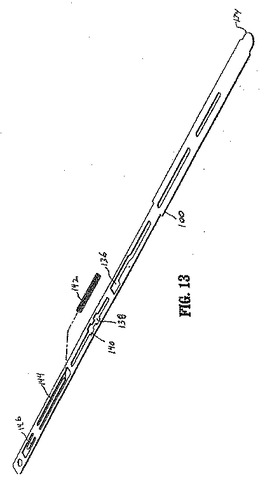
【図14】
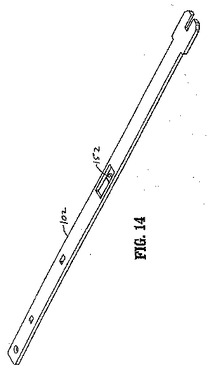
【図15】
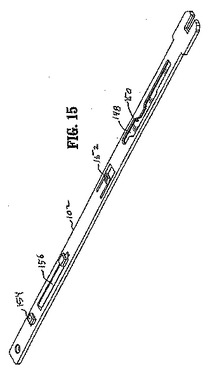
【図16】
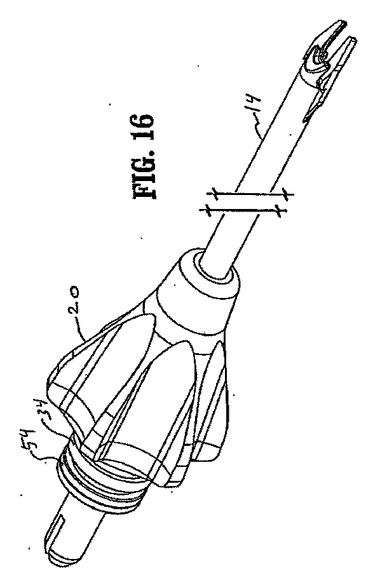
【図17】
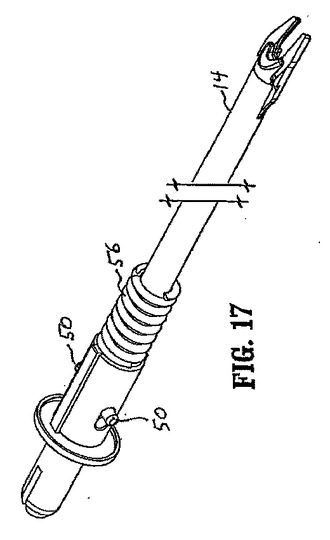
【図18】
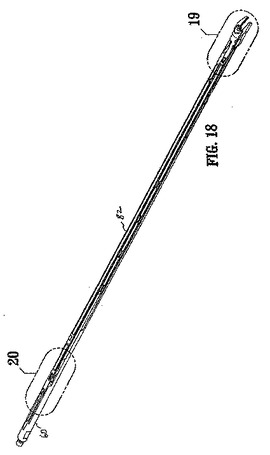
【図19】

【図20】
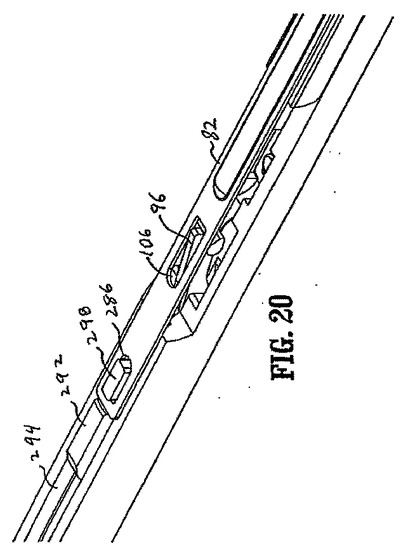
【図21】
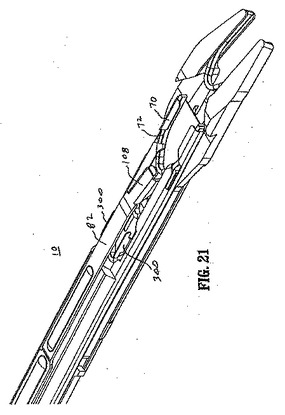
【図22】
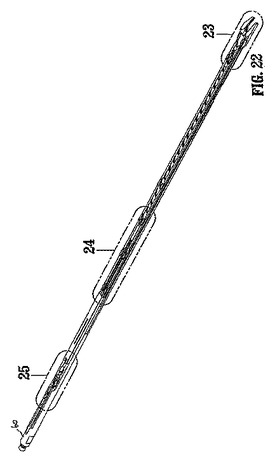
【図23】
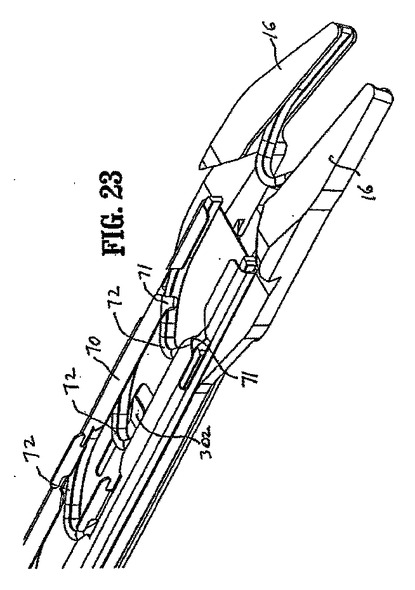
【図24】
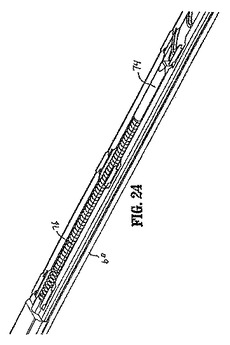
【図25】
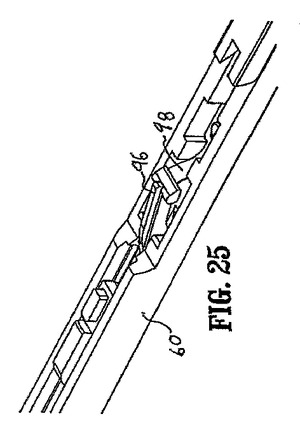
【図26】
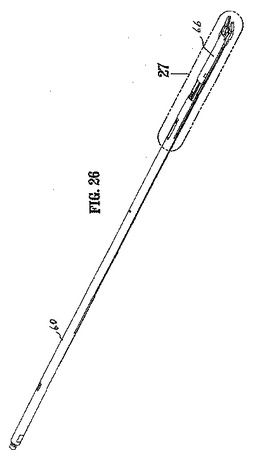
【図27】
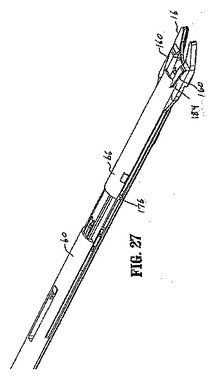
【図28】
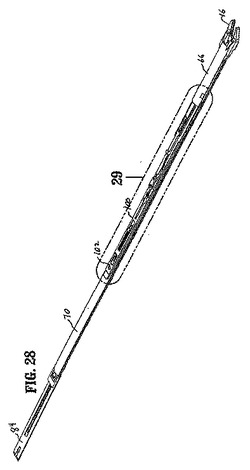
【図29】
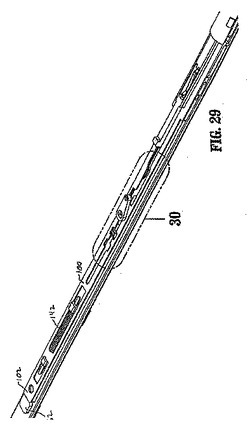
【図30】
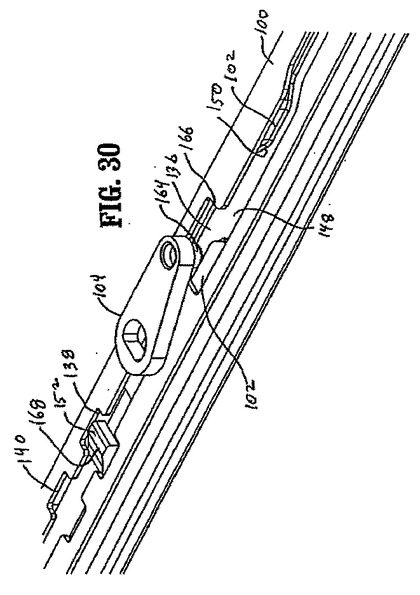
【図31】
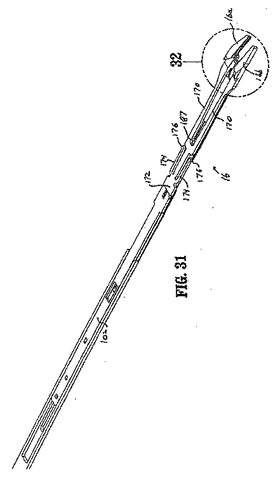
【図32】
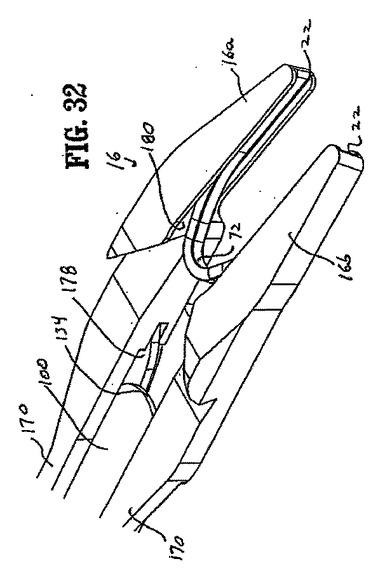
【図33】
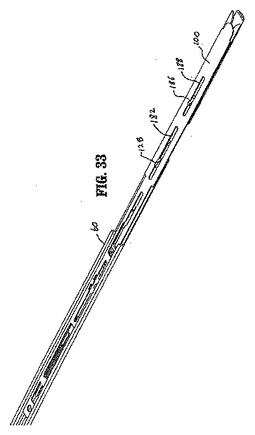
【図34】
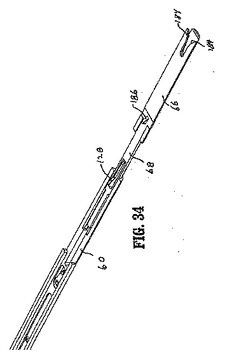
【図35】
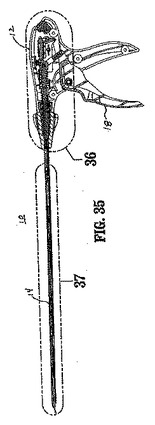
【図36】
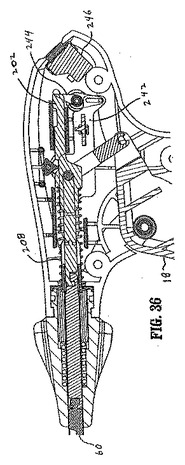
【図37】
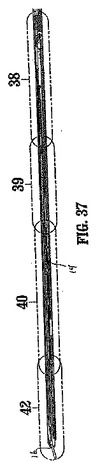
【図38】
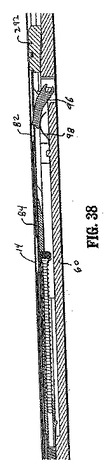
【図39】
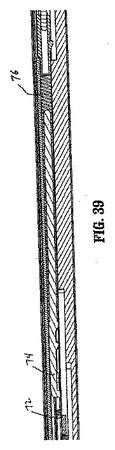
【図40】
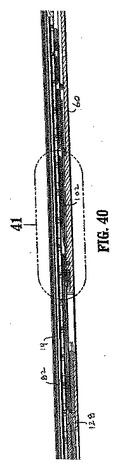
【図41】
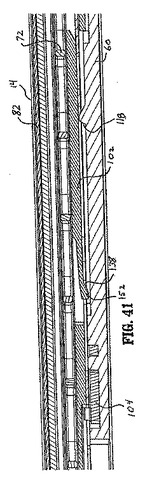
【図42】
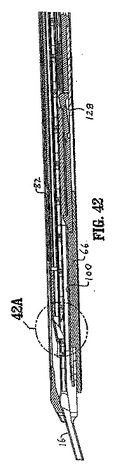
【図42A】
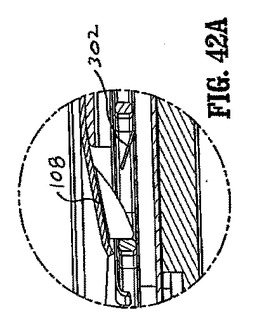
【図43】
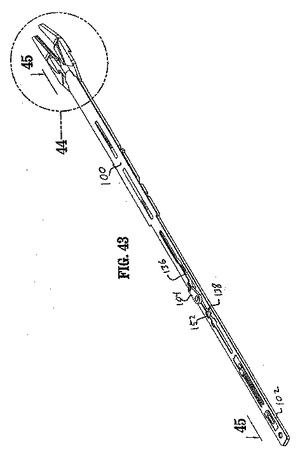
【図44】
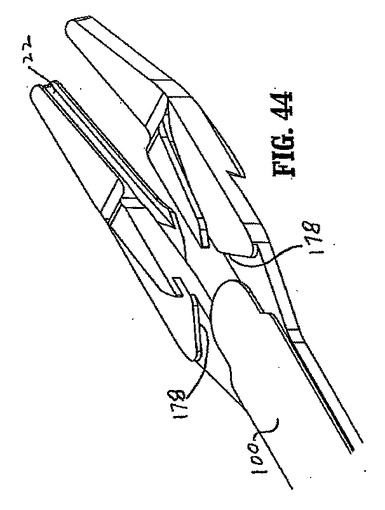
【図45】
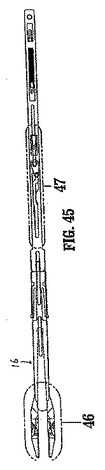
【図46】
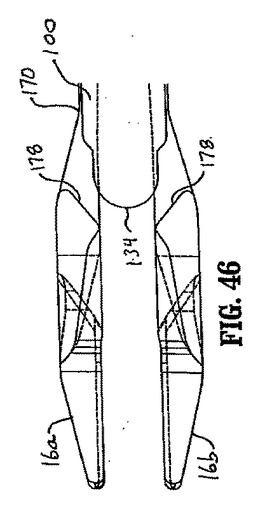
【図47】
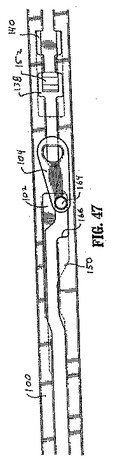
【図48】
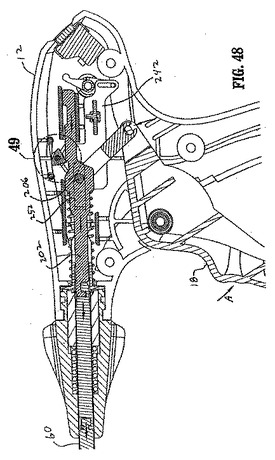
【図49】
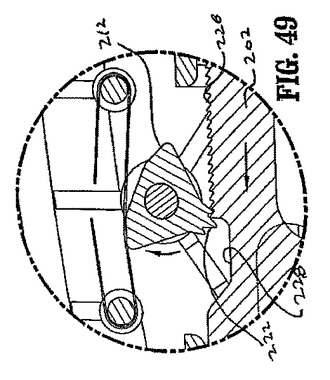
【図50】
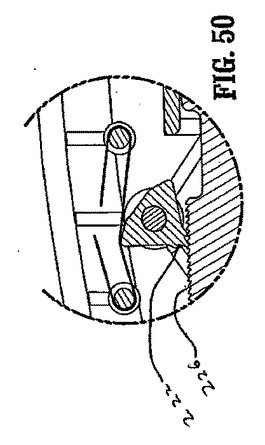
【図51】
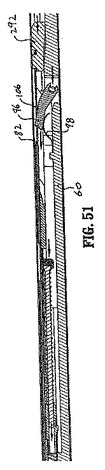
【図52】
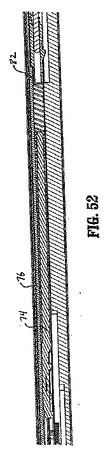
【図53】
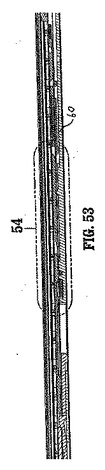
【図54】
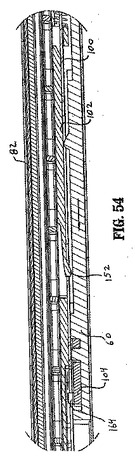
【図55】
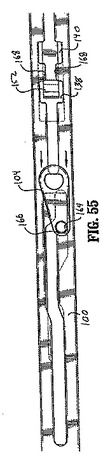
【図56】
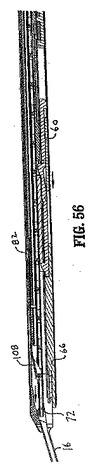
【図57】
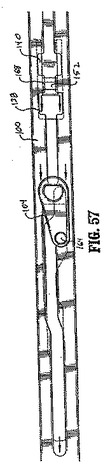
【図58】
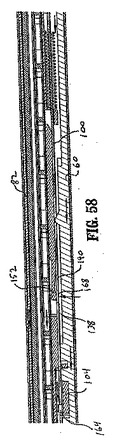
【図59】
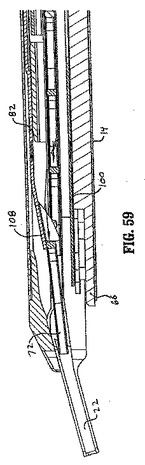
【図60】
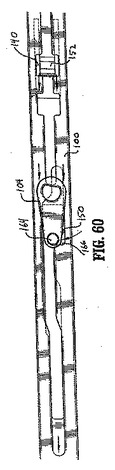
【図61】
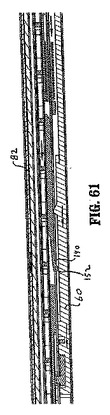
【図62】
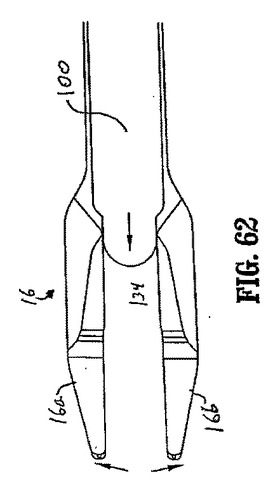
【図63】
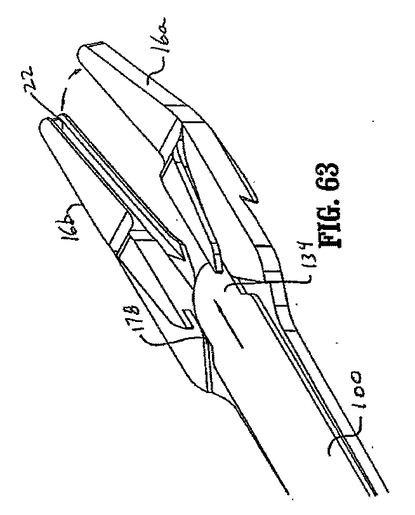
【図64】
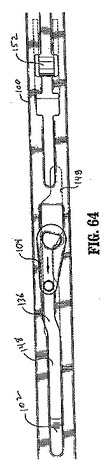
【図65】
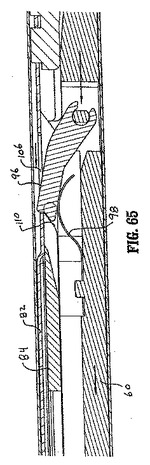
【図66】
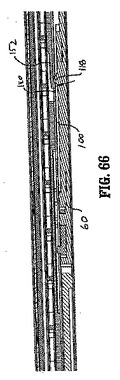
【図67】
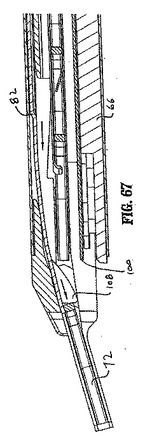
【図68】
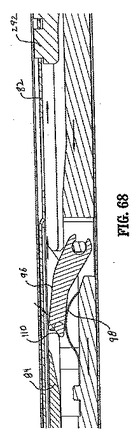
【図69】
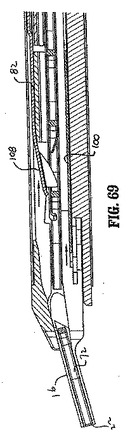
【図69A】
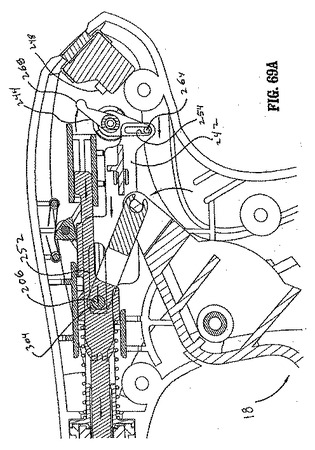
【図70】
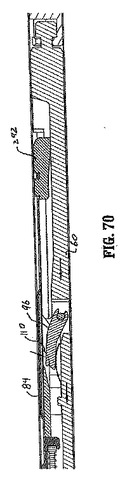
【図71】
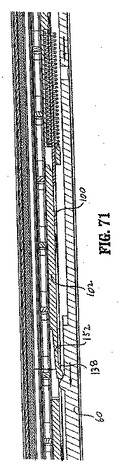
【図72】
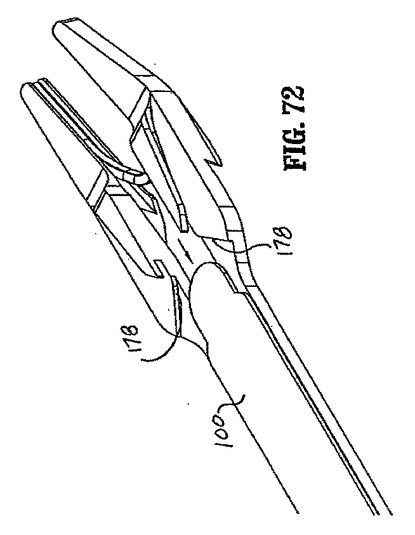
【図73】
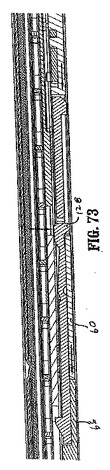
【図74】
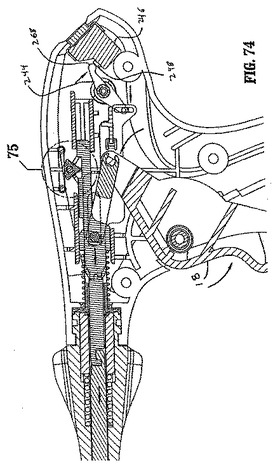
【図75】
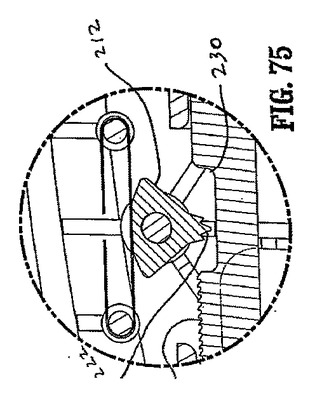
【図76】

【図77】
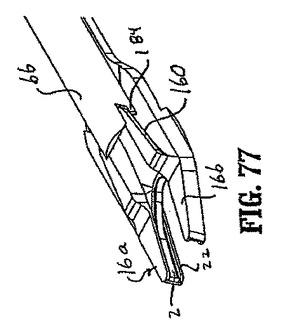
【図78】
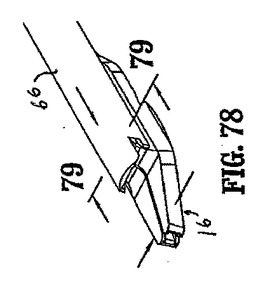
【図79】
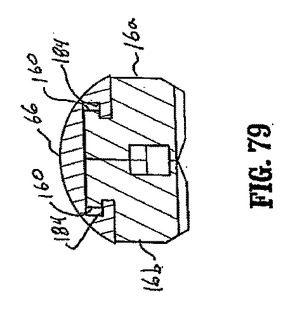
【図80】
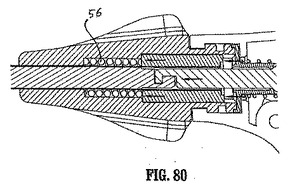
【図81】
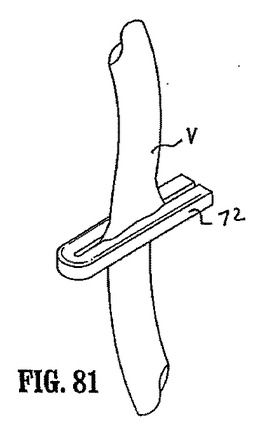
【図82】
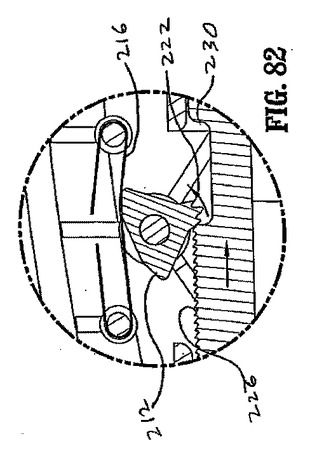
【図83】
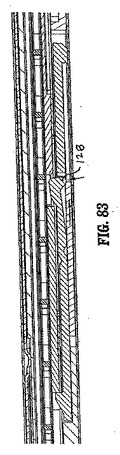
【図84】
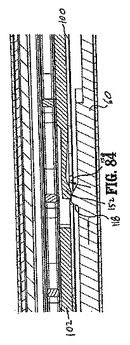
【図85】
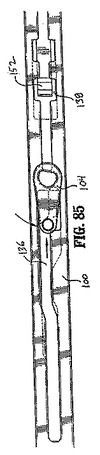
【図86】
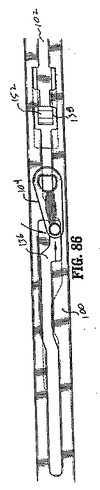
【図87】
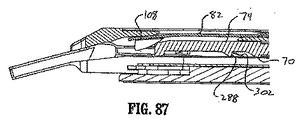
【図88】
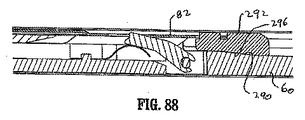
【図89】
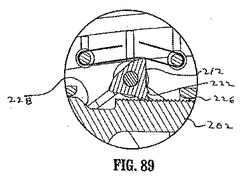
【図2】
【図3】
【図4】
【図5】
【図6】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図7A】
【図7B】
【図7C】
【図7D】
【図7E】
【図8】
【図9】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図9G】
【図10】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図10H】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図42A】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図68】
【図69】
【図69A】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図81】
【図82】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88】
【図89】
【公開番号】特開2012−30090(P2012−30090A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−211580(P2011−211580)
【出願日】平成23年9月27日(2011.9.27)
【分割の表示】特願2007−535830(P2007−535830)の分割
【原出願日】平成17年10月7日(2005.10.7)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2011−211580(P2011−211580)
【出願日】平成23年9月27日(2011.9.27)
【分割の表示】特願2007−535830(P2007−535830)の分割
【原出願日】平成17年10月7日(2005.10.7)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]