
内視鏡挿入形状解析システム
【課題】内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供する。
【解決手段】本発明の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
【解決手段】本発明の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内視鏡挿入形状解析システムに関し、特に、被検体内に挿入された内視鏡の挿入部の挿入形状が所定の形状を形成しているか否かを判定可能な内視鏡挿入形状解析システムに関するものである。
【背景技術】
【0002】
内視鏡は、医療分野及び工業分野等において従来広く用いられている。また、内視鏡は、例えば、医療分野においては、生体組織等に対し、観察及び種々の処置を行う際に用いられている。
【0003】
特に、内視鏡が有する挿入部を被検体の肛門側から挿入し、下部消化管に対して観察や種々の処置を行う場合においては、該挿入部を屈曲した体腔内に円滑に挿入するために、体腔内における該挿入部の位置、屈曲状態等を検出することのできる内視鏡挿入形状解析システムが、内視鏡と併せて用いられている。
【0004】
前述した内視鏡挿入形状解析システムと略同様の機能を有する装置としては、例えば、特許文献1の内視鏡挿入形状解析装置がある。
【0005】
特許文献1には、内視鏡の挿入部のうち、ループ形成候補にあたる部分をn個に分割し、各分割点の所定の平面(z=0平面)へ投影された3次元座標値をP型フーリエ記述子として特徴量化するとともに、該特徴量と教師データとの比較を行うことにより、該ループ形成候補にあたる部分がループ形状を形成しているか否かを判断する、という構成が開示されている。
【特許文献1】特開2004−358095号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、前述した、特許文献1に記載の構成においては、所定の平面への投影座標値に基づいてループ形状の有無が判断されるため、例えば、被検体の体位変換、または、被検体の腸の長さの個人差により、ループ形状の検出精度が低下してしまう虞がある。
【0007】
本発明は、前述した点に鑑みてなされたものであり、内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明における第1の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
【0009】
本発明における第2の内視鏡挿入形状解析システムは、前記第1の内視鏡挿入形状解析システムにおいて、前記座標平面設定部は、前記所定の複数の箇所の座標値及び前記挿入形状に応じ、前記挿入形状が存在する一の座標平面と、該一の座標平面の法線ベクトルに基づく他の座標平面と、を少なくとも設定することを特徴とする。
【0010】
本発明における第3の内視鏡挿入形状解析システムは、前記第1または前記第2の内視鏡挿入形状解析システムにおいて、前記所定の形状は、ループ形状であることを特徴とする。
【発明の効果】
【0011】
本発明における内視鏡挿入形状解析システムによると、内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能である。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。
【0013】
図1から図5は、本発明の実施形態に係るものである。図1は、本発明の第1の実施形態に係る生体観測システムの要部の構成の一例を示す図である。図2は、図1の内視鏡挿入形状検出装置において検出される、図1の内視鏡の挿入部に設けられたソースコイルの座標を示す図である。図3Aは、図1の内視鏡挿入形状検出装置において生成される、挿入形状データの概要を示す図である。図3Bは、図3Aのフレームデータ各々に含まれるデータ及び情報の概要を示す図である。図3Cは、図3Bのコイル座標データに含まれる3次元座標データの概要を示す図である。図4は、図1の画像処理装置において、ループ形状の有無を判定する際に行われる処理の一例を示すフローチャートである。図5は、図4のフローチャートの処理の概要を幾何的に示した図である。
【0014】
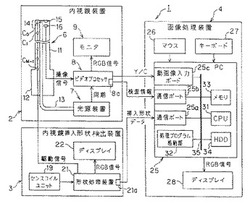
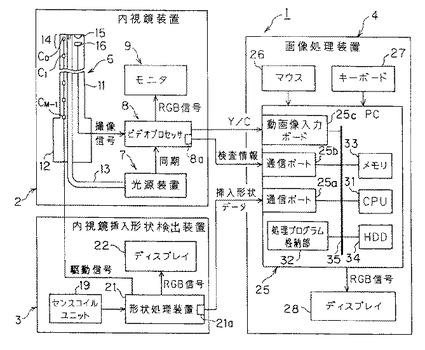
生体観測システム1は、図1に示すように、内視鏡6による被検体の内部の観察が可能な内視鏡装置2と、該被検体の内部に挿入された内視鏡6の挿入形状を検出するとともに、該挿入形状を挿入形状データとして出力する内視鏡挿入形状検出装置3と、内視鏡挿入形状検出装置3から出力される挿入形状データに応じた各種処理を行う画像処理装置4と、を有して構成されている。
内視鏡装置2は、被検体の内部に存在する大腸等に挿入可能であるとともに、該被検体の内部の被写体を撮像し、撮像信号として出力する内視鏡6と、該被写体を照明するための照明光を内視鏡6に対して供給する光源装置7と、内視鏡6から出力される撮像信号に対して信号処理を行い、映像信号として出力するビデオプロセッサ8と、ビデオプロセッサ8から出力される映像信号に基づき、内視鏡6により撮像された被写体の像を内視鏡観察画像として表示するモニタ9と、を有して構成されている。
【0015】
内視鏡6は、被検体の内部に挿入可能な細長の挿入部11と、挿入部11の後端に設けられた操作部12とを有している。挿入部11の内部には、一端側が挿入部11の先端部14に配置されているとともに、他端側が光源装置7に接続可能である、ライトガイド13が挿通されている。これにより、光源装置7から供給される照明光は、ライトガイド13を介し、挿入部11の先端部14に設けられた図示しない照明窓から出射される。
【0016】
なお、挿入部11の先端部14の後端側には、湾曲自在に構成された図示しない湾曲部が設られている。そして、前記図示しない湾曲部は、操作部12に設けられた図示しない湾曲操作ノブ等の操作により湾曲させることができる。
【0017】
先端部14には、図示しない照明窓に隣接して設けられた、図示しない観察窓に対物レンズ15が取り付けられている。また、対物レンズ15の結像位置には、電荷結合素子(CCDと略記)等からなる撮像素子16の撮像面が配置されている。
【0018】
撮像素子16は、信号線を介してビデオプロセッサ8と接続されており、対物レンズ15により結像された被写体の像を光電変換し、撮像信号としてビデオプロセッサ8へ出力する。
【0019】
ビデオプロセッサ8は、撮像素子16から出力される撮像信号に基づいて映像信号を生
成するための信号処理を行う。そして、ビデオプロセッサ8は、前記信号処理により生成した映像信号である、例えばRGB信号をモニタ9に出力する。そして、モニタ9の表示面には、撮像素子16において撮像された被写体の像が内視鏡観察画像として表示される。
【0020】
なお、光源装置7は、R(赤)、G(緑)及びB(青)からなる面順次の照明光を供給する場合には、各々の光が供給される期間に同期した同期信号をビデオプロセッサ8に出力するものとする。このとき、ビデオプロセッサ8は、光源装置7から出力される前記同期信号に同期して信号処理を行うものとする。
【0021】
内視鏡6の操作部12には、前述した図示しない湾曲操作ノブに加え、レリーズ指示等の指示を行うことが可能な図示しないスイッチが設けられている。
【0022】
また、内視鏡6の挿入部11の内部には、長手方向に所定の間隔を有して複数のソースコイルC0、C1、…、CM−1(C0〜CM−1と略記)が配置されている。そして、ソースコイルC0〜CM−1は、内視鏡挿入形状検出装置3から出力される駆動信号に応じ、各々周囲に磁界を発生する。
【0023】
そして、ソースコイルC0〜CM−1において発せられた磁界は、内視鏡挿入形状検出装置3が具備する、複数のセンスコイルが内蔵されたセンスコイルユニット19により検出される。
【0024】
内視鏡挿入形状検出装置3は、内視鏡6に設けられたソースコイルC0〜CM−1において発せられた磁界を検出するセンスコイルユニット19と、センスコイルユニット19によって検出された磁界の検出信号に基づいて挿入部11の形状(挿入形状)を推定する形状処理装置21と、形状処理装置21によって推定された挿入形状を表示するディスプレイ22とを有して構成されている。
【0025】
挿入状態取得部の一部を構成するセンスコイルユニット19は、患者が横たわる検査ベッドの周辺部などに配置され、ソースコイルC0〜CM−1による磁界を検出し、検出した該磁界を検出信号として形状処理装置21に出力する。
【0026】
挿入状態取得部の一部を構成するとともに、挿入形状検出部の機能を有する形状処理装置21は、検出信号に基づいて、ソースコイルC0〜CM−1の各位置座標データの算出を行うとともに、算出した該位置座標データに基づいて挿入部11の挿入形状を推定する。また、形状処理装置21は、推定した挿入部11の挿入形状の映像信号を生成するとともに、生成した映像信号である、例えばRGB信号をディスプレイ22に対して出力する。これにより、ディスプレイ22の表示画面には、挿入部11の挿入形状が画像表示される。さらに、形状処理装置21は、内視鏡6による観察が行われている最中に、挿入部11の挿入形状を示す3次元座標情報、及び形状表示属性等の挿入形状データを連続的に生成し、通信ポート21aを介して画像処理装置4に出力する。
【0027】
なお、本実施形態の形状処理装置21は、例えば、レリーズスイッチが操作された際の挿入形状データのみを画像処理装置4に出力することができるものとする。
【0028】
また、本実施形態の内視鏡挿入形状検出装置3は、形状処理装置21による形状検出処理により生成された後、ディスプレイ22に表示される挿入形状の画像の回転角及び拡大縮小率等の形状表示属性を、図示しない操作パネル等において指示及び入力することにより、変更することができるものとする。
【0029】
なお、ビデオプロセッサ8は、例えば、患者の氏名、生年月日、性別、年齢、患者コード及び検査日時等の情報である検査情報を入力するための図示しない操作パネルを有している。そして、前記図示しない操作パネルにおいて入力された検査情報は、通信ポート8aを介して画像処理装置4にも送信される。
【0030】
画像処理装置4は、内視鏡挿入形状検出装置3から出力される挿入形状データと、ビデオプロセッサ8から出力される検査情報とに基づき、ユーザを補助または支援可能な挿入補助情報を生成するための解析処理を行うパーソナルコンピュータ(以下、単にPCと称する)25と、PC25に対する各種指示及び入力を行うことが可能なマウス26及びキーボード27と、PC25の解析処理により生成された挿入補助情報等を再生または表示可能なディスプレイ28とを有している。
【0031】
PC25は、内視鏡挿入形状検出装置3の形状処理装置21の通信ポート21aから出力される挿入形状データを取り込む通信ポート25aと、前記内視鏡装置2のビデオプロセッサ8の通信ポート8aから出力される検査情報を取り込む通信ポート25bと、ビデオプロセッサ8で生成された動画像の映像信号を所定の圧縮画像データに変換する動画像入力ボード25cと、各種処理及び制御を行うCPU31と、CPU31における前記画像処理に用いられる処理プログラムが格納された処理プログラム格納部32と、CPU31により処理されたデータ等を一時的に格納するメモリ33と、CPU31により処理された画像データ等を記憶するハードディスク(以下、単にHDDと称する)34とを有する。そして、PC25が有する各部は、バスライン35により相互に接続されている。
【0032】
画像処理装置4の動画像入力ボード25cには、ビデオプロセッサ8で生成された動画像の映像信号として、例えばY/C信号が入力される。そして、動画像入力ボード25cは、前記動画像の映像信号を、例えば、MJPEG形式等の所定の圧縮形式を用いて圧縮動画像データに変換するとともに、該圧縮動画像データをハードディスク34等に対して出力する。
【0033】
なお、通信ポート25aにおいて取り込まれた挿入形状データ、及び、通信ポート25bにおいて取り込まれた検査情報は、例えば、HDD34に対して出力されることにより、PC25内において保存可能である。
【0034】
また、本実施形態の内視鏡挿入形状解析システムは、センスコイルユニット19と、形状処理装置21と、CPU31とを要部として有して構成されているものとする。
【0035】
ここで、内視鏡挿入形状検出装置3が挿入形状データを生成する際に行う処理について説明を行う。
内視鏡挿入形状検出装置3の形状処理装置21は、内視鏡6の撮像素子16から1フレーム分の撮像信号が出力されるタイミングに応じ、内視鏡6の挿入部11に内蔵されたM個のソースコイルC0〜CM−1の3次元座標を含む挿入形状データを生成する。また、形状処理装置21は、前記挿入形状データを画像処理装置4へ出力するとともに、前記挿入形状データに基づいて挿入部11の挿入形状の画像を生成し、該挿入形状の画像をディスプレイ22へ出力する。
【0036】
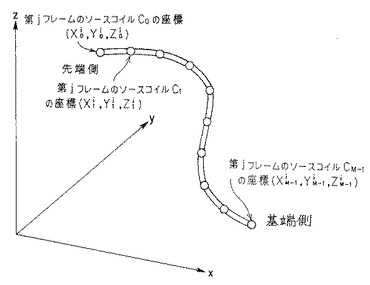
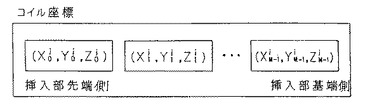
なお、第jフレーム(ただし、j=0、1、2…)における、挿入部11の先端側からi番目(ただし、i=0、1、…、M−1)のソースコイルCiの3次元座標は、図2のように(Xij,Yij,Zij)として示されるものとする。
【0037】
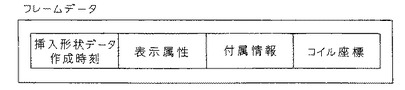
この内視鏡挿入形状検出装置3で検出されたソースコイルC0〜CM−1の座標系のデータを含む挿入形状データは、図3Aに示すように、各フレームに関するフレームデータ(つまり、第0フレームデータ、第1フレームデータ、…)として構成されており、画像処理装置4に順次送信される。そして、各フレームデータは、図3Bに示すように、挿入形状データの作成時刻、表示属性、付属情報及びソースコイルの3次元座標等のデータを有して構成されている。
【0038】
また、コイル座標データは、図3Cに示すように、挿入部11の先端側から基端側(操作部12側)に順次配置されたソースコイルC0〜CM−1の3次元座標をそれぞれ示すデータである。なお、内視鏡挿入形状検出装置3による検出範囲外のソースコイルの3次元座標は、例えば、検出範囲外であることが分かるような所定の座標値(例えば(0,0,0))として設定されるものとする。
【0039】
次に、本実施形態の生体観測システム1の作用について説明を行う。
【0040】
ユーザにより内視鏡6の挿入部11が被検体の肛門側から体腔内へ挿入されると、挿入部11の先端部14に設けられた撮像素子16により、該体腔内に存在する被写体が撮像される。撮像素子16により撮像された被写体の像は、撮像信号として出力され、ビデオプロセッサ8により信号処理が施されて映像信号に変換された後、モニタ9に対して出力される。これにより、モニタ9には、撮像素子16により撮像された被写体の像が内視鏡観察画像として表示される。
【0041】
内視鏡挿入形状検出装置3は、ソースコイルC0〜CM−1各々から発せられた磁界をセンスコイルユニット19において検出するとともに、該磁界に応じて出力される検出信号に基づく挿入部11の挿入形状を形状処理装置21において推定する。これにより、ディスプレイ22には、形状処理装置21において推定された挿入部11の挿入形状が表示される。
【0042】
また、内視鏡挿入形状検出装置3の形状処理装置21は、各ソースコイルの位置情報を含むフレームデータを、通信ポート21aを介して画像処理装置4のPC25が有するCPU31へ順次出力する。
【0043】
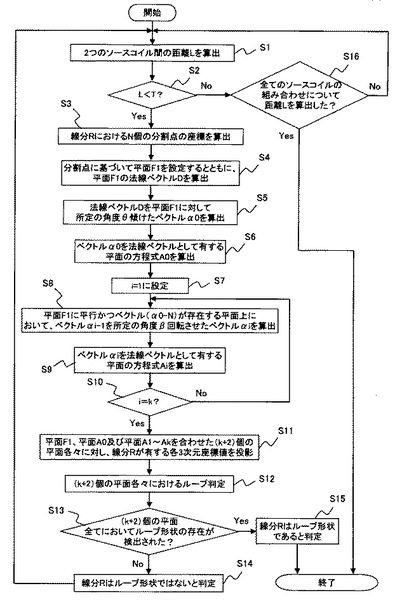
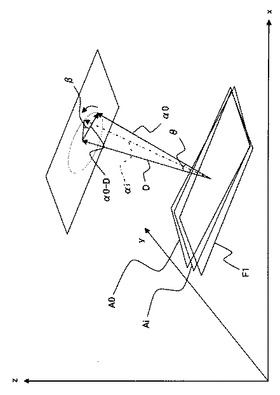
CPU31は、内視鏡挿入形状検出装置3から出力される挿入形状データに基づき、被検体内に挿入された挿入部11がループ形状を形成しているか否かを判定するための処理として、図4のフローチャートに示す処理を行う。なお、図5は、図4のフローチャートの処理の概要を幾何的に示した図である。
【0044】
まず、CPU31は、内視鏡挿入形状検出装置3から出力される挿入形状データが有する、ソースコイルC0〜CM−1の3次元座標のデータに基づき、いずれか2つのソースコイル間の距離Lを算出する(図4のステップS1)とともに、算出した該距離Lが閾値T未満であるか否かを検出する。そして、CPU31は、距離Lが閾値T以上であることを検出した場合(図4のステップS2)、後述する図4のステップS3の処理を行う。また、CPU31は、距離Lが閾値T以上であることを検出した場合(図4のステップS2)、さらに、全てのソースコイルC0〜CM−1の組み合わせについて、2つのソースコイル間の距離Lを算出したか否かを検出する。なお、本実施形態において、2つのソースコイル間の距離Lは、一方のソースコイルから他方のソースコイルまでの直線距離を示すものとする。
【0045】
そして、CPU31は、全てのソースコイルC0〜CM−1の組み合わせについて、2つのソースコイル間の距離Lを算出したことを検出した場合(図4のステップS16)、一連の処理を終了する。また、CPU31は、2つのソースコイル間の距離Lを算出していないソースコイルC0〜CM−1の組み合わせがあることを検出した場合(図4のステップS16)、図4のステップS1以降の処理を再度行う。
【0046】
CPU31は、図4のステップS2において距離Lが閾値T未満である2つのソースコイルを検出すると、被検体内に挿入された挿入部11における該2つのソースコイル間の挿入形状に基づいて生成される線分である線分Rを分割することにより、該線分RにおけるN個の分割点の座標値を算出する(図4のステップS3)。なお、前記線分Rは、内視鏡挿入形状検出装置3により推定された挿入部11の挿入形状の一部を用いて生成されるものであっても良いし、また、ソースコイルC0〜CM−1の3次元座標のデータに対してCatmull−Rom曲線の方程式を適用することにより生成されるものであっても良い。
【0047】
その後、CPU31は、図4のステップS3の処理において生成したN個の分割点に基づき、線分Rが存在する平面F1を設定するとともに、該平面F1における法線ベクトルDを算出する(図4のステップS4)。
【0048】
具体的には、座標平面設定部としてのCPU31は、線分RにおけるN個の分割点の座標値(V1x,V1y,V1z)、(V2x,V2y,V2z)、…、(VNx,VNy,VNz)各々を一般的な平面の方程式に代入することにより、下記数式(1)を平面F1の方程式として設定する。
【0049】

なお、数式(1)における左辺の行列は、N行1列からなる行列であるとする。また、数式(2)における行列Aは、数式(1)の右辺2番目の行列と同一の行列であり、N行3列からなる行列であるとする
そして、CPU31は、上記数式(2)の行列Aにおける擬似逆行列A+の算出、及び、上記数式(1)におけるLU分解の適用により、法線ベクトルD(a,b,c)の値を算出する。
【0050】
次に、CPU31は、法線ベクトルD(a,b,c)を平面F1に対して角度θ(例えば10度)傾けたベクトルα0を算出する(図4のステップS5)とともに、該ベクトルα0を法線ベクトルとする平面A0を算出する(図4のステップS6)。
【0051】
さらに、CPU31は、変数i(i=1,2,…,k)を1に設定した(図4のステップS7)後、平面F1に平行かつベクトル(α0−N)が存在する平面上において、ベクトルαi−1を所定の角度β(例えば45度)回転させたベクトルαiを算出する(図4のステップS8)とともに、該ベクトルαiを法線ベクトルとする平面Aiを算出する(図4のステップS9)。
【0052】
そして、座標平面設定部としてのCPU31は、変数i=kになるまで、すなわち、ベクトルα1からαk各々を法線ベクトルとして有する、平面A1〜Akを算出するまで、前述した図4のステップS8及びステップS9の処理を繰り返し行う(図4のステップS10)。
【0053】
挿入形状投影部としてのCPU31は、図4のステップS3及びステップS4の処理により算出した平面F1と、図4のステップS5及びステップS6の処理により算出した平面A0と、図4のステップS7からステップS10までの処理を繰り返すことにより算出した平面A1〜Akとを合わせた(k+2)個の平面各々に対し、線分Rが有する各3次元座標値を投影する(図4のステップS11)。
【0054】
その後、挿入形状判定部としてのCPU31は、(k+2)個の平面各々に投影された線分Rの各3次元座標値に基づき、該(k+2)個の平面各々におけるループ形状の判定処理を行う(図4のステップS12)。具体的には、CPU31は、例えば、(k+2)個の平面各々に投影された線分Rの各3次元座標値から、P型フーリエ記述子に基づくパワースペクトルを算出するとともに、算出した該パワースペクトルと、HDD34等に予め書き込まれた、1または複数のループ形状のパターンデータ(教師データ)に応じた所定の1または複数のパワースペクトルとを比較し、所定の条件を満たす場合に線分Rがループ形状を形成していると判定する。なお、前述した、P型フーリエ記述子及びパワースペクトルを用いて一の線分がループ形状を形成しているか否かを判定する方法は、特開2004−358095号公報に記載されているため、ここでは詳細な説明を省略する。
【0055】
挿入形状判定部としてのCPU31は、図4のステップS12におけるループ判定に基づき、(k+2)個の平面のうち、いずれか一の平面においてループ形状の存在が検出されなかった(図4のステップS13)場合、線分Rがループ形状を形成していないと判定し(図4のステップS14)、これまでの処理対象の2つのソースコイルの組み合わせとは異なる、他の2つのソースコイルの組み合わせにおいて、図4のステップS1以降の処理を再度行う。また、挿入形状判定部としてのCPU31は、図4のステップS12におけるループ判定に基づき、(k+2)個の平面のうち、全ての平面においてループ形状の存在が検出された(図4のステップS13)場合、線分Rがループ形状を形成していると判定し(図4のステップS15)、一連の処理を終了する。
【0056】
以上に述べたように、本実施形態の内視鏡挿入形状解析システムを具備する生体観測システム1は、挿入部11の挿入形状が投影される座標平面を、該挿入形状に応じた複数の座標平面に設定しつつ、該挿入形状がループ形状を形成しているか否かを判定可能な構成を有している。その結果、本実施形態の内視鏡挿入形状解析システムを具備する生体観測システム1は、内視鏡6の挿入部11により形成されるループ形状を従来に比べて高精度に検出することができる。
【0057】
なお、本発明は、上述した実施形態に限定されるものではなく、発明の趣旨を逸脱しない範囲内において種々の変更や応用が可能であることは勿論である。
【図面の簡単な説明】
【0058】
【図1】本発明の実施形態に係る内視鏡挿入形状解析システムを具備する生体観測システムの要部の構成の一例を示す図。
【図2】図1の内視鏡挿入形状検出装置において検出される、図1の内視鏡の挿入部に設けられたソースコイルの座標を示す図。
【図3A】図1の内視鏡挿入形状検出装置において生成される、挿入形状データの概要を示す図。
【図3B】図3Aのフレームデータ各々に含まれるデータ及び情報の概要を示す図。
【図3C】図3Bのコイル座標データに含まれる3次元座標データの概要を示す図。
【図4】図1の画像処理装置において、ループ形状の有無を判定する際に行われる処理の一例を示すフローチャート。
【図5】図4のフローチャートの処理の概要を幾何的に示した図。
【符号の説明】
【0059】
1・・・生体観測システム、2・・・内視鏡装置、3・・・内視鏡挿入形状検出装置、4・・・画像処理装置、6・・・内視鏡、7・・・光源装置、8・・・ビデオプロセッサ、8a,21a,25a,25b・・・通信ポート、9・・・モニタ、11・・・挿入部、12・・・操作部、13・・・ライトガイド、14・・・先端部、15・・・対物レンズ、16・・・撮像素子、19・・・センスコイルユニット、21・・・形状処理装置、22,28・・・ディスプレイ、25c・・・動画像入力ボード、26・・・マウス、27・・・キーボード、31・・・CPU、32・・・処理プログラム格納部、33・・・メモリ、33a・・・フレームデータ、33b・・・解析データ、33c・・・挿入形状解析情報、34・・・ハードディスク、35・・・バスライン
【技術分野】
【0001】
本発明は、内視鏡挿入形状解析システムに関し、特に、被検体内に挿入された内視鏡の挿入部の挿入形状が所定の形状を形成しているか否かを判定可能な内視鏡挿入形状解析システムに関するものである。
【背景技術】
【0002】
内視鏡は、医療分野及び工業分野等において従来広く用いられている。また、内視鏡は、例えば、医療分野においては、生体組織等に対し、観察及び種々の処置を行う際に用いられている。
【0003】
特に、内視鏡が有する挿入部を被検体の肛門側から挿入し、下部消化管に対して観察や種々の処置を行う場合においては、該挿入部を屈曲した体腔内に円滑に挿入するために、体腔内における該挿入部の位置、屈曲状態等を検出することのできる内視鏡挿入形状解析システムが、内視鏡と併せて用いられている。
【0004】
前述した内視鏡挿入形状解析システムと略同様の機能を有する装置としては、例えば、特許文献1の内視鏡挿入形状解析装置がある。
【0005】
特許文献1には、内視鏡の挿入部のうち、ループ形成候補にあたる部分をn個に分割し、各分割点の所定の平面(z=0平面)へ投影された3次元座標値をP型フーリエ記述子として特徴量化するとともに、該特徴量と教師データとの比較を行うことにより、該ループ形成候補にあたる部分がループ形状を形成しているか否かを判断する、という構成が開示されている。
【特許文献1】特開2004−358095号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、前述した、特許文献1に記載の構成においては、所定の平面への投影座標値に基づいてループ形状の有無が判断されるため、例えば、被検体の体位変換、または、被検体の腸の長さの個人差により、ループ形状の検出精度が低下してしまう虞がある。
【0007】
本発明は、前述した点に鑑みてなされたものであり、内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明における第1の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
【0009】
本発明における第2の内視鏡挿入形状解析システムは、前記第1の内視鏡挿入形状解析システムにおいて、前記座標平面設定部は、前記所定の複数の箇所の座標値及び前記挿入形状に応じ、前記挿入形状が存在する一の座標平面と、該一の座標平面の法線ベクトルに基づく他の座標平面と、を少なくとも設定することを特徴とする。
【0010】
本発明における第3の内視鏡挿入形状解析システムは、前記第1または前記第2の内視鏡挿入形状解析システムにおいて、前記所定の形状は、ループ形状であることを特徴とする。
【発明の効果】
【0011】
本発明における内視鏡挿入形状解析システムによると、内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能である。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して本発明の実施の形態を説明する。
【0013】
図1から図5は、本発明の実施形態に係るものである。図1は、本発明の第1の実施形態に係る生体観測システムの要部の構成の一例を示す図である。図2は、図1の内視鏡挿入形状検出装置において検出される、図1の内視鏡の挿入部に設けられたソースコイルの座標を示す図である。図3Aは、図1の内視鏡挿入形状検出装置において生成される、挿入形状データの概要を示す図である。図3Bは、図3Aのフレームデータ各々に含まれるデータ及び情報の概要を示す図である。図3Cは、図3Bのコイル座標データに含まれる3次元座標データの概要を示す図である。図4は、図1の画像処理装置において、ループ形状の有無を判定する際に行われる処理の一例を示すフローチャートである。図5は、図4のフローチャートの処理の概要を幾何的に示した図である。
【0014】
生体観測システム1は、図1に示すように、内視鏡6による被検体の内部の観察が可能な内視鏡装置2と、該被検体の内部に挿入された内視鏡6の挿入形状を検出するとともに、該挿入形状を挿入形状データとして出力する内視鏡挿入形状検出装置3と、内視鏡挿入形状検出装置3から出力される挿入形状データに応じた各種処理を行う画像処理装置4と、を有して構成されている。
内視鏡装置2は、被検体の内部に存在する大腸等に挿入可能であるとともに、該被検体の内部の被写体を撮像し、撮像信号として出力する内視鏡6と、該被写体を照明するための照明光を内視鏡6に対して供給する光源装置7と、内視鏡6から出力される撮像信号に対して信号処理を行い、映像信号として出力するビデオプロセッサ8と、ビデオプロセッサ8から出力される映像信号に基づき、内視鏡6により撮像された被写体の像を内視鏡観察画像として表示するモニタ9と、を有して構成されている。
【0015】
内視鏡6は、被検体の内部に挿入可能な細長の挿入部11と、挿入部11の後端に設けられた操作部12とを有している。挿入部11の内部には、一端側が挿入部11の先端部14に配置されているとともに、他端側が光源装置7に接続可能である、ライトガイド13が挿通されている。これにより、光源装置7から供給される照明光は、ライトガイド13を介し、挿入部11の先端部14に設けられた図示しない照明窓から出射される。
【0016】
なお、挿入部11の先端部14の後端側には、湾曲自在に構成された図示しない湾曲部が設られている。そして、前記図示しない湾曲部は、操作部12に設けられた図示しない湾曲操作ノブ等の操作により湾曲させることができる。
【0017】
先端部14には、図示しない照明窓に隣接して設けられた、図示しない観察窓に対物レンズ15が取り付けられている。また、対物レンズ15の結像位置には、電荷結合素子(CCDと略記)等からなる撮像素子16の撮像面が配置されている。
【0018】
撮像素子16は、信号線を介してビデオプロセッサ8と接続されており、対物レンズ15により結像された被写体の像を光電変換し、撮像信号としてビデオプロセッサ8へ出力する。
【0019】
ビデオプロセッサ8は、撮像素子16から出力される撮像信号に基づいて映像信号を生
成するための信号処理を行う。そして、ビデオプロセッサ8は、前記信号処理により生成した映像信号である、例えばRGB信号をモニタ9に出力する。そして、モニタ9の表示面には、撮像素子16において撮像された被写体の像が内視鏡観察画像として表示される。
【0020】
なお、光源装置7は、R(赤)、G(緑)及びB(青)からなる面順次の照明光を供給する場合には、各々の光が供給される期間に同期した同期信号をビデオプロセッサ8に出力するものとする。このとき、ビデオプロセッサ8は、光源装置7から出力される前記同期信号に同期して信号処理を行うものとする。
【0021】
内視鏡6の操作部12には、前述した図示しない湾曲操作ノブに加え、レリーズ指示等の指示を行うことが可能な図示しないスイッチが設けられている。
【0022】
また、内視鏡6の挿入部11の内部には、長手方向に所定の間隔を有して複数のソースコイルC0、C1、…、CM−1(C0〜CM−1と略記)が配置されている。そして、ソースコイルC0〜CM−1は、内視鏡挿入形状検出装置3から出力される駆動信号に応じ、各々周囲に磁界を発生する。
【0023】
そして、ソースコイルC0〜CM−1において発せられた磁界は、内視鏡挿入形状検出装置3が具備する、複数のセンスコイルが内蔵されたセンスコイルユニット19により検出される。
【0024】
内視鏡挿入形状検出装置3は、内視鏡6に設けられたソースコイルC0〜CM−1において発せられた磁界を検出するセンスコイルユニット19と、センスコイルユニット19によって検出された磁界の検出信号に基づいて挿入部11の形状(挿入形状)を推定する形状処理装置21と、形状処理装置21によって推定された挿入形状を表示するディスプレイ22とを有して構成されている。
【0025】
挿入状態取得部の一部を構成するセンスコイルユニット19は、患者が横たわる検査ベッドの周辺部などに配置され、ソースコイルC0〜CM−1による磁界を検出し、検出した該磁界を検出信号として形状処理装置21に出力する。
【0026】
挿入状態取得部の一部を構成するとともに、挿入形状検出部の機能を有する形状処理装置21は、検出信号に基づいて、ソースコイルC0〜CM−1の各位置座標データの算出を行うとともに、算出した該位置座標データに基づいて挿入部11の挿入形状を推定する。また、形状処理装置21は、推定した挿入部11の挿入形状の映像信号を生成するとともに、生成した映像信号である、例えばRGB信号をディスプレイ22に対して出力する。これにより、ディスプレイ22の表示画面には、挿入部11の挿入形状が画像表示される。さらに、形状処理装置21は、内視鏡6による観察が行われている最中に、挿入部11の挿入形状を示す3次元座標情報、及び形状表示属性等の挿入形状データを連続的に生成し、通信ポート21aを介して画像処理装置4に出力する。
【0027】
なお、本実施形態の形状処理装置21は、例えば、レリーズスイッチが操作された際の挿入形状データのみを画像処理装置4に出力することができるものとする。
【0028】
また、本実施形態の内視鏡挿入形状検出装置3は、形状処理装置21による形状検出処理により生成された後、ディスプレイ22に表示される挿入形状の画像の回転角及び拡大縮小率等の形状表示属性を、図示しない操作パネル等において指示及び入力することにより、変更することができるものとする。
【0029】
なお、ビデオプロセッサ8は、例えば、患者の氏名、生年月日、性別、年齢、患者コード及び検査日時等の情報である検査情報を入力するための図示しない操作パネルを有している。そして、前記図示しない操作パネルにおいて入力された検査情報は、通信ポート8aを介して画像処理装置4にも送信される。
【0030】
画像処理装置4は、内視鏡挿入形状検出装置3から出力される挿入形状データと、ビデオプロセッサ8から出力される検査情報とに基づき、ユーザを補助または支援可能な挿入補助情報を生成するための解析処理を行うパーソナルコンピュータ(以下、単にPCと称する)25と、PC25に対する各種指示及び入力を行うことが可能なマウス26及びキーボード27と、PC25の解析処理により生成された挿入補助情報等を再生または表示可能なディスプレイ28とを有している。
【0031】
PC25は、内視鏡挿入形状検出装置3の形状処理装置21の通信ポート21aから出力される挿入形状データを取り込む通信ポート25aと、前記内視鏡装置2のビデオプロセッサ8の通信ポート8aから出力される検査情報を取り込む通信ポート25bと、ビデオプロセッサ8で生成された動画像の映像信号を所定の圧縮画像データに変換する動画像入力ボード25cと、各種処理及び制御を行うCPU31と、CPU31における前記画像処理に用いられる処理プログラムが格納された処理プログラム格納部32と、CPU31により処理されたデータ等を一時的に格納するメモリ33と、CPU31により処理された画像データ等を記憶するハードディスク(以下、単にHDDと称する)34とを有する。そして、PC25が有する各部は、バスライン35により相互に接続されている。
【0032】
画像処理装置4の動画像入力ボード25cには、ビデオプロセッサ8で生成された動画像の映像信号として、例えばY/C信号が入力される。そして、動画像入力ボード25cは、前記動画像の映像信号を、例えば、MJPEG形式等の所定の圧縮形式を用いて圧縮動画像データに変換するとともに、該圧縮動画像データをハードディスク34等に対して出力する。
【0033】
なお、通信ポート25aにおいて取り込まれた挿入形状データ、及び、通信ポート25bにおいて取り込まれた検査情報は、例えば、HDD34に対して出力されることにより、PC25内において保存可能である。
【0034】
また、本実施形態の内視鏡挿入形状解析システムは、センスコイルユニット19と、形状処理装置21と、CPU31とを要部として有して構成されているものとする。
【0035】
ここで、内視鏡挿入形状検出装置3が挿入形状データを生成する際に行う処理について説明を行う。
内視鏡挿入形状検出装置3の形状処理装置21は、内視鏡6の撮像素子16から1フレーム分の撮像信号が出力されるタイミングに応じ、内視鏡6の挿入部11に内蔵されたM個のソースコイルC0〜CM−1の3次元座標を含む挿入形状データを生成する。また、形状処理装置21は、前記挿入形状データを画像処理装置4へ出力するとともに、前記挿入形状データに基づいて挿入部11の挿入形状の画像を生成し、該挿入形状の画像をディスプレイ22へ出力する。
【0036】
なお、第jフレーム(ただし、j=0、1、2…)における、挿入部11の先端側からi番目(ただし、i=0、1、…、M−1)のソースコイルCiの3次元座標は、図2のように(Xij,Yij,Zij)として示されるものとする。
【0037】
この内視鏡挿入形状検出装置3で検出されたソースコイルC0〜CM−1の座標系のデータを含む挿入形状データは、図3Aに示すように、各フレームに関するフレームデータ(つまり、第0フレームデータ、第1フレームデータ、…)として構成されており、画像処理装置4に順次送信される。そして、各フレームデータは、図3Bに示すように、挿入形状データの作成時刻、表示属性、付属情報及びソースコイルの3次元座標等のデータを有して構成されている。
【0038】
また、コイル座標データは、図3Cに示すように、挿入部11の先端側から基端側(操作部12側)に順次配置されたソースコイルC0〜CM−1の3次元座標をそれぞれ示すデータである。なお、内視鏡挿入形状検出装置3による検出範囲外のソースコイルの3次元座標は、例えば、検出範囲外であることが分かるような所定の座標値(例えば(0,0,0))として設定されるものとする。
【0039】
次に、本実施形態の生体観測システム1の作用について説明を行う。
【0040】
ユーザにより内視鏡6の挿入部11が被検体の肛門側から体腔内へ挿入されると、挿入部11の先端部14に設けられた撮像素子16により、該体腔内に存在する被写体が撮像される。撮像素子16により撮像された被写体の像は、撮像信号として出力され、ビデオプロセッサ8により信号処理が施されて映像信号に変換された後、モニタ9に対して出力される。これにより、モニタ9には、撮像素子16により撮像された被写体の像が内視鏡観察画像として表示される。
【0041】
内視鏡挿入形状検出装置3は、ソースコイルC0〜CM−1各々から発せられた磁界をセンスコイルユニット19において検出するとともに、該磁界に応じて出力される検出信号に基づく挿入部11の挿入形状を形状処理装置21において推定する。これにより、ディスプレイ22には、形状処理装置21において推定された挿入部11の挿入形状が表示される。
【0042】
また、内視鏡挿入形状検出装置3の形状処理装置21は、各ソースコイルの位置情報を含むフレームデータを、通信ポート21aを介して画像処理装置4のPC25が有するCPU31へ順次出力する。
【0043】
CPU31は、内視鏡挿入形状検出装置3から出力される挿入形状データに基づき、被検体内に挿入された挿入部11がループ形状を形成しているか否かを判定するための処理として、図4のフローチャートに示す処理を行う。なお、図5は、図4のフローチャートの処理の概要を幾何的に示した図である。
【0044】
まず、CPU31は、内視鏡挿入形状検出装置3から出力される挿入形状データが有する、ソースコイルC0〜CM−1の3次元座標のデータに基づき、いずれか2つのソースコイル間の距離Lを算出する(図4のステップS1)とともに、算出した該距離Lが閾値T未満であるか否かを検出する。そして、CPU31は、距離Lが閾値T以上であることを検出した場合(図4のステップS2)、後述する図4のステップS3の処理を行う。また、CPU31は、距離Lが閾値T以上であることを検出した場合(図4のステップS2)、さらに、全てのソースコイルC0〜CM−1の組み合わせについて、2つのソースコイル間の距離Lを算出したか否かを検出する。なお、本実施形態において、2つのソースコイル間の距離Lは、一方のソースコイルから他方のソースコイルまでの直線距離を示すものとする。
【0045】
そして、CPU31は、全てのソースコイルC0〜CM−1の組み合わせについて、2つのソースコイル間の距離Lを算出したことを検出した場合(図4のステップS16)、一連の処理を終了する。また、CPU31は、2つのソースコイル間の距離Lを算出していないソースコイルC0〜CM−1の組み合わせがあることを検出した場合(図4のステップS16)、図4のステップS1以降の処理を再度行う。
【0046】
CPU31は、図4のステップS2において距離Lが閾値T未満である2つのソースコイルを検出すると、被検体内に挿入された挿入部11における該2つのソースコイル間の挿入形状に基づいて生成される線分である線分Rを分割することにより、該線分RにおけるN個の分割点の座標値を算出する(図4のステップS3)。なお、前記線分Rは、内視鏡挿入形状検出装置3により推定された挿入部11の挿入形状の一部を用いて生成されるものであっても良いし、また、ソースコイルC0〜CM−1の3次元座標のデータに対してCatmull−Rom曲線の方程式を適用することにより生成されるものであっても良い。
【0047】
その後、CPU31は、図4のステップS3の処理において生成したN個の分割点に基づき、線分Rが存在する平面F1を設定するとともに、該平面F1における法線ベクトルDを算出する(図4のステップS4)。
【0048】
具体的には、座標平面設定部としてのCPU31は、線分RにおけるN個の分割点の座標値(V1x,V1y,V1z)、(V2x,V2y,V2z)、…、(VNx,VNy,VNz)各々を一般的な平面の方程式に代入することにより、下記数式(1)を平面F1の方程式として設定する。
【0049】
なお、数式(1)における左辺の行列は、N行1列からなる行列であるとする。また、数式(2)における行列Aは、数式(1)の右辺2番目の行列と同一の行列であり、N行3列からなる行列であるとする
そして、CPU31は、上記数式(2)の行列Aにおける擬似逆行列A+の算出、及び、上記数式(1)におけるLU分解の適用により、法線ベクトルD(a,b,c)の値を算出する。
【0050】
次に、CPU31は、法線ベクトルD(a,b,c)を平面F1に対して角度θ(例えば10度)傾けたベクトルα0を算出する(図4のステップS5)とともに、該ベクトルα0を法線ベクトルとする平面A0を算出する(図4のステップS6)。
【0051】
さらに、CPU31は、変数i(i=1,2,…,k)を1に設定した(図4のステップS7)後、平面F1に平行かつベクトル(α0−N)が存在する平面上において、ベクトルαi−1を所定の角度β(例えば45度)回転させたベクトルαiを算出する(図4のステップS8)とともに、該ベクトルαiを法線ベクトルとする平面Aiを算出する(図4のステップS9)。
【0052】
そして、座標平面設定部としてのCPU31は、変数i=kになるまで、すなわち、ベクトルα1からαk各々を法線ベクトルとして有する、平面A1〜Akを算出するまで、前述した図4のステップS8及びステップS9の処理を繰り返し行う(図4のステップS10)。
【0053】
挿入形状投影部としてのCPU31は、図4のステップS3及びステップS4の処理により算出した平面F1と、図4のステップS5及びステップS6の処理により算出した平面A0と、図4のステップS7からステップS10までの処理を繰り返すことにより算出した平面A1〜Akとを合わせた(k+2)個の平面各々に対し、線分Rが有する各3次元座標値を投影する(図4のステップS11)。
【0054】
その後、挿入形状判定部としてのCPU31は、(k+2)個の平面各々に投影された線分Rの各3次元座標値に基づき、該(k+2)個の平面各々におけるループ形状の判定処理を行う(図4のステップS12)。具体的には、CPU31は、例えば、(k+2)個の平面各々に投影された線分Rの各3次元座標値から、P型フーリエ記述子に基づくパワースペクトルを算出するとともに、算出した該パワースペクトルと、HDD34等に予め書き込まれた、1または複数のループ形状のパターンデータ(教師データ)に応じた所定の1または複数のパワースペクトルとを比較し、所定の条件を満たす場合に線分Rがループ形状を形成していると判定する。なお、前述した、P型フーリエ記述子及びパワースペクトルを用いて一の線分がループ形状を形成しているか否かを判定する方法は、特開2004−358095号公報に記載されているため、ここでは詳細な説明を省略する。
【0055】
挿入形状判定部としてのCPU31は、図4のステップS12におけるループ判定に基づき、(k+2)個の平面のうち、いずれか一の平面においてループ形状の存在が検出されなかった(図4のステップS13)場合、線分Rがループ形状を形成していないと判定し(図4のステップS14)、これまでの処理対象の2つのソースコイルの組み合わせとは異なる、他の2つのソースコイルの組み合わせにおいて、図4のステップS1以降の処理を再度行う。また、挿入形状判定部としてのCPU31は、図4のステップS12におけるループ判定に基づき、(k+2)個の平面のうち、全ての平面においてループ形状の存在が検出された(図4のステップS13)場合、線分Rがループ形状を形成していると判定し(図4のステップS15)、一連の処理を終了する。
【0056】
以上に述べたように、本実施形態の内視鏡挿入形状解析システムを具備する生体観測システム1は、挿入部11の挿入形状が投影される座標平面を、該挿入形状に応じた複数の座標平面に設定しつつ、該挿入形状がループ形状を形成しているか否かを判定可能な構成を有している。その結果、本実施形態の内視鏡挿入形状解析システムを具備する生体観測システム1は、内視鏡6の挿入部11により形成されるループ形状を従来に比べて高精度に検出することができる。
【0057】
なお、本発明は、上述した実施形態に限定されるものではなく、発明の趣旨を逸脱しない範囲内において種々の変更や応用が可能であることは勿論である。
【図面の簡単な説明】
【0058】
【図1】本発明の実施形態に係る内視鏡挿入形状解析システムを具備する生体観測システムの要部の構成の一例を示す図。
【図2】図1の内視鏡挿入形状検出装置において検出される、図1の内視鏡の挿入部に設けられたソースコイルの座標を示す図。
【図3A】図1の内視鏡挿入形状検出装置において生成される、挿入形状データの概要を示す図。
【図3B】図3Aのフレームデータ各々に含まれるデータ及び情報の概要を示す図。
【図3C】図3Bのコイル座標データに含まれる3次元座標データの概要を示す図。
【図4】図1の画像処理装置において、ループ形状の有無を判定する際に行われる処理の一例を示すフローチャート。
【図5】図4のフローチャートの処理の概要を幾何的に示した図。
【符号の説明】
【0059】
1・・・生体観測システム、2・・・内視鏡装置、3・・・内視鏡挿入形状検出装置、4・・・画像処理装置、6・・・内視鏡、7・・・光源装置、8・・・ビデオプロセッサ、8a,21a,25a,25b・・・通信ポート、9・・・モニタ、11・・・挿入部、12・・・操作部、13・・・ライトガイド、14・・・先端部、15・・・対物レンズ、16・・・撮像素子、19・・・センスコイルユニット、21・・・形状処理装置、22,28・・・ディスプレイ、25c・・・動画像入力ボード、26・・・マウス、27・・・キーボード、31・・・CPU、32・・・処理プログラム格納部、33・・・メモリ、33a・・・フレームデータ、33b・・・解析データ、33c・・・挿入形状解析情報、34・・・ハードディスク、35・・・バスライン
【特許請求の範囲】
【請求項1】
被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、
前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、
前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、
前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、
前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、
を有することを特徴とする内視鏡挿入形状解析システム。
【請求項2】
前記座標平面設定部は、前記所定の複数の箇所の座標値及び前記挿入形状に応じ、前記挿入形状が存在する一の座標平面と、該一の座標平面の法線ベクトルに基づく他の座標平面と、を少なくとも設定することを特徴とする請求項1に記載の内視鏡挿入形状解析システム。
【請求項3】
前記所定の形状は、ループ形状であることを特徴とする請求項1または請求項2に記載の内視鏡挿入形状解析システム。
【請求項1】
被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、
前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、
前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、
前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、
前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、
を有することを特徴とする内視鏡挿入形状解析システム。
【請求項2】
前記座標平面設定部は、前記所定の複数の箇所の座標値及び前記挿入形状に応じ、前記挿入形状が存在する一の座標平面と、該一の座標平面の法線ベクトルに基づく他の座標平面と、を少なくとも設定することを特徴とする請求項1に記載の内視鏡挿入形状解析システム。
【請求項3】
前記所定の形状は、ループ形状であることを特徴とする請求項1または請求項2に記載の内視鏡挿入形状解析システム。
【図1】

【図2】
【図3A】

【図3B】
【図3C】
【図4】
【図5】
【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【公開番号】特開2008−119259(P2008−119259A)
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願番号】特願2006−306974(P2006−306974)
【出願日】平成18年11月13日(2006.11.13)
【出願人】(304050923)オリンパスメディカルシステムズ株式会社 (1,905)
【Fターム(参考)】
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願日】平成18年11月13日(2006.11.13)
【出願人】(304050923)オリンパスメディカルシステムズ株式会社 (1,905)
【Fターム(参考)】
[ Back to top ]