
内視鏡的な外科用クリップアプライヤ
【課題】体組織に対する外科用クリップの適用のための装置を提供すること。
【解決手段】体組織に対する外科用クリップの適用のための装置であって、上記装置は、ハンドル部分と、ハンドル部分から遠位的に延びており、長手軸を定義する本体と、本体内に配置された複数の外科用クリップと、本体の遠位端に隣接するように取り付けられたジョーアセンブリと、フィードバーと、遠位的な方法で複数のクリップをバイアスするように構成されたクリッププッシャと、ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、アクチュエータに接続された複数のラチェット歯を有するラックと、ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪と、フィードバーの近位に配置されたバーと、を備えている。
【解決手段】体組織に対する外科用クリップの適用のための装置であって、上記装置は、ハンドル部分と、ハンドル部分から遠位的に延びており、長手軸を定義する本体と、本体内に配置された複数の外科用クリップと、本体の遠位端に隣接するように取り付けられたジョーアセンブリと、フィードバーと、遠位的な方法で複数のクリップをバイアスするように構成されたクリッププッシャと、ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、アクチュエータに接続された複数のラチェット歯を有するラックと、ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪と、フィードバーの近位に配置されたバーと、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
(関連特許出願の引用)
当該の特許出願は、2005年10月7日出願の米国特許出願第11/245,523号の一部継続出願であり、2004年10月8日出願の米国仮特許出願第60/617,104号および2004年10月8日出願の米国仮特許出願第60/617,016号に対する優先権を主張し、これらは全て、そのまま本明細書中に参照として援用される。
【0002】
(技術分野)
本開示は、外科用クリップアプライヤに関連する。より具体的には、本開示は、該外科用クリップアプライヤのジョー(jaw)構造を安定化させるためのメカニズムを有し、かつ、該外科用クリップアプライヤが、格納されたクリップ量を使い果たしたときに、外科用クリップアプライヤを発射することを防止することによって、外科用クリップアプライヤのクリップ無しの発射を防止するメカニズムをも有する外科用クリップアプライヤに関連する。
【背景技術】
【0003】
(関連技術の背景)
腹腔鏡の処置が、腹部の内部において行われる。該処置は、小さな切開部分を介しており、皮膚における小さな入口切開部分を介して挿入される、細い内視鏡チューブまたはカニューレを介する。身体の別の部位において行われる最小限に侵襲性のある処置は、たいてい、概して「内視鏡」処置と呼ばれる。外科医は、入口切開部分を介して身体にチューブまたはカニューレデバイスを挿入および延伸し、アクセスポートを提供する。このポートは、これを介して様々な医療器具の挿入を可能にする。
【0004】
これらの器具、例えば当該のクリップアプライヤは、切開部分からかなり隔たった臓器、血管、導管、または体組織に対する外科的な処置を行うために用いられる。大抵これらの処置の間に、止血作用のあるクリップを血管または様々な導管に適用し、処置の間の体液の流れを防止する必要がある。様々な幾何学的形状を有する多くの異なる止血クリップが、用いられ得、それら全ては、本開示の範囲内である。
【0005】
最小限に侵襲性のある処置の1つの利点は、より小さな切開部分を介した内部臓器へのアクセスの結果である、患者へのトラウマの低減である。公知の内視鏡クリップアプライヤは、身体の空洞への単一の挿入の間に多数のクリップを適用することを可能にすることによって、より高度な、最小限に侵襲性のある処置の出現を大いに容易にした。市販の内視鏡クリップアプライヤは、概して10mmの直径を有し、10mmのカニューレを介して導入されるように適合される。他の市販の内視鏡クリップアプライヤも、概して約5mmの外径であり得、5mmのカニューレを介して導入されるように適合されている。
【0006】
最小限に侵襲性のある処置が、進化し続け、その利点が、さらなる臨床上の適用に延長されるにつれて、切開の大きさをさらに減少させ、それ故に、該切開を介して導入される全ての器具類の大きさをさらに減少させることが望ましくなった。
【0007】
制限された空間内で様々な機能を行うように意図された外科用器具の構造は、必然的に複雑である。これらの器具の組立てのプロセスは、大抵複雑であり、繰り返して様々な機能を行うために、多くの比較的に小さな部品を伴い得る。従って、そのような器具が組み立てられ得るように、最大限に容易な組立てにすることが望ましい。ジョーのねじれを最小限にする構造を有し、外科手術の部位において要求される切開の大きさをさらに最小限にする一方で、外科用の生体恒常性クリップの容易な適用を促進する内視鏡クリップアプライヤを提供することも望ましい。クリップアプライヤの中に、残存する生体恒常性クリップがもはや無いときに、外科医がクリップアプライヤを発射することを防止する(および、ハンドルをロックする)構造を有する内視鏡クリップアプライヤを提供することも望ましい。クリップアプライヤがクリップを発射し、適用したことを伝える、複数の重複する信号を外科医に提供する構造を有する内視鏡クリップアプライヤを提供することも、さらに望ましい。
【発明の概要】
【課題を解決するための手段】
【0008】
本開示の目的は、残存するクリップがないときにクリップ無しの発射を防止し、残存するクリップがないときには発射できない、外科用クリップアプライヤを提供することである。
【0009】
本開示のさらなる目的は、クリップが発射されたときに、外科医に信号を送る外科用クリップアプライヤを提供することである。
【0010】
本開示のさらなる目的は、クリップが発射されたときに、外科医に視覚的に信号を送る外科用クリップアプライヤを提供することである。
【0011】
本開示のさらに別の目的は、細長いノブを有することによって、外科医が、人差し指のみを用いて該細長いノブを回転させ内視鏡部分を回転させることを可能にする、外科用クリップアプライヤを提供することである。
【0012】
本開示のその上に別の目的は、製造が容易なドライバロックアウトメカニズムを有する外科用クリップアプライヤを提供することである。
【0013】
本開示の第1の局面によると、外科用クリップ適用装置が提供され、該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、該本体内に配置された多くの外科用クリップを有する。該装置は、ウェッジプレートに隣接する筺体内でバイアスした、移動可能な部材を有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させる。ウェッジプレートは、最も遠位の位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔が置かれた位置にジョーアセンブリを維持するように構成され、ウェッジプレート端は、装填の間のジョーアセンブリのねじれを低減する。移動可能な部材は、装填の間に、ウェッジプレートを最も遠位な位置に保持し、移動可能な部材は、装填の完了において偏向される。移動可能な部材は、偏向されるとウェッジプレートを解放し、回転可能な部材は、最も遠位な位置からのウェッジプレートの長手方向の近位の収縮を可能にする。
【0014】
本開示の別の局面によると、体組織への外科用クリップの適用のための装置が提供される。該装置は、ハンドルアセンブリを有し、該ハンドルアセンブリは、ハンドルと、該ハンドルに関して移動可能なトリガとを有する。該トリガは、トリガロックアウトノッチを有する。該装置はまた、ハンドル部分から遠位的に延伸しており、長手軸を定義する本体と、該本体内に配置された複数の外科用クリップと、該本体の遠位端の部分に隣接して取り付けられたジョーアセンブリとを有し、該ジョーアセンブリは、間隔を置いた位置と近接した位置との間を移動可能な第1および第2のジョー部を含む。該装置はまた、ジョーアセンブリに外科用クリップを個別に、遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成された、クリッププッシャを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能なアクチュエータをさらに有する。
【0015】
該装置は、第1のシャフトを有する第1の回転可能な部材と、第1の爪を有する第1のアームとを有する、ロックアウトメカニズムをさらに有する。第1のシャフトは、ハンドル部分を固定して係合させ、該メカニズムは、第2の回転可能な部材を有し、該部材は、第2のポストを有する該第2の回転可能な部材の半径位置のエスケープノッチと、該第2の回転可能な部材の内表面の内周に十分に配置された複数の歯とを有する。該メカニズムは、第2のポストを受けるためのアパーチャを有する第3の回転可能な部材を有し、該第3の回転可能な部材は、トリガと係合するように構成されている。
【0016】
爪は、第2の回転可能な部材の内表面を回転することによって歯とかみ合い、トリガが発射されるときに、該爪は、複数の歯のうちの次の歯に前進する。歯は、残存するクリップに対して数において相補的であり、クリップが使い果たされたときには、該爪は、エスケープノッチに前進する。トリガが発射され、クリップが使い果たされた場合には、第1の爪は、第2の回転可能な部材からトリガノッチへと横断する。該爪は、発射を防止するためにトリガノッチと嵌合する。
【0017】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供され、該装置は、ハンドル部分と、該ハンドル部分から遠位的に延伸しており、長手軸を定義する本体とを備えている。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置は、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。
【0018】
該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータと、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材とを有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させる。ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該端は、装填の間のジョーアセンブリのねじれを低減させ、アクチュエータは、信号デバイスをさらに作動させる。信号デバイスは、少なくとも1つのクリップが発射されたことを示す。
【0019】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置は、本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有し、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置は、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータを有する。該装置は、該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材をさらに有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させ、ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該端は、装填の間のジョーアセンブリのねじれを低減させる。アクチュエータは、少なくとも1つのクリップが発射されたことを示すように構成された可聴のデバイスをさらに作動させる。
【0020】
その上に別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、該本体内に配置された複数の外科用クリップとを有する。該装置はまた、該本体の遠位端に隣接するように取り付けられたジョーアセンブリを有し、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置はまた、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータと、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材とを有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させ、ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該ウェッジプレート端は、装填の間のジョーアセンブリのねじれを低減させる。該装置は、回転可能な部材によってハンドルに接続された本体をさらに有する。回転可能な部材は、ハンドルおよび本体に固定して接続される。回転可能な部材の回転で、該本体が回転し、ジョー部が回転する。回転可能な部材は、第1の細長いノブ筐体と、複数のノッチが周りに配置された第2のノブとを有する、複数の部材である。第2のノブは、ノブ筐体上に配置される。複数の部材のうちの少なくとも1つは、本体を回転させるために、人差し指によって回転されるように適合される。
【0021】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む。該装置はまた、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあるように構成されたフィードバーを有する。該装置は、該本体内に少なくとも部分的に配置され、該ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータとともに、複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャをさらに有する。該装置はまた、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、該アクチュエータに接続された複数のラチェット歯を有するラックとを有する。少なくとも1つの歯を有する爪は、ラチェット歯を係合させるように構成される。該爪は、ハンドル部分においてバイアスされている。該アクチュエータが長手方向に移動されると、該爪の上を越えさせられる。該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている。
【0022】
該装置はまた、フィードバーの近接に配置されたバーを有する。該バーは、スプリングによってバイアスされており、クリップ搬送チャネルのシーリングとフロアとの間に収納されている。該クリップ搬送チャネルは、遠位窓を含む。クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させる。該バーが、該遠位窓と実質的に一直線に並ぶときに、該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させる。該第2の位置にある該フィードバーは、アクチュエータが近位的に移動することを防止し、それによって、該爪が、ラックのラチェット歯と係合するように操作する。該爪および該ラックは、該アクチュエータが長手方向に移動することを防止する。
【0023】
体組織に対する外科用クリップの適用のための装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む。該装置はまた、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあるように構成されたフィードバーを有する。該フィードバーは、少なくとも1つの近位フィンを含む。
【0024】
該装置はまた、複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能なアクチュエータを有する。該アクチュエータは、近位窓を含む。ジョークロージャ部材は、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置にジョー部を移動させる。複数のラチェット歯を有するラックは、アクチュエータと接続される。該装置はまた、ラチェット歯をハンドル部分において傾いた爪と係合させるように構成された、少なくとも1つの歯を有する爪を含む。
【0025】
該アクチュエータが、長手方向に移動するときに、ラチェット歯は、爪の上を越えさせられる。該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている。該装置はまた、フィードバーの近接に配置されたバーを有する。該バーは、スピンドルによって傾けられ、クリップ搬送チャネルのシーリングとフロアとの間に収納されている。
【0026】
クリップ搬送チャネルは、遠位窓を含む。クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させる。該バーが、該遠位窓と実質的に一直線に並ぶときに、該スプリングによって偏かされた該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させる。
【0027】
第2の位置における該フィードバーは、アクチュエータの近位窓と係合する近位フィンを含む。フィードバーとアクチュエータとの係合は、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、実質的に中間位置において、爪をラックのラチェット歯と係合されるように操作する。該爪および該ラックは、該アクチュエータが長手方向に移動することを防止することによって、該アクチュエータをロックする。
【0028】
体組織に対する外科用クリップの適用のための装置は、クリップが該装置から放たれる度に、規則的に増加するように遠位的に移動するクリッププッシャを含む。該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、フィードバーは、第2の位置に偏向される。該第2の位置にある該フィードバーは、アクチュエータと係合する部分を有する。
【0029】
第2の偏向された位置にあるフィードバーは、収縮を防止するが、アクチュエータの前進は防止せず、それによって、爪をラックのラチェット歯と係合されるように操作する。該爪および該ラックは、アクチュエータが長手方向に移動することを防止し、それによって、該アクチュエータをロックする。
【0030】
本発明は、さらに以下の手段を提供する。
【0031】
(項目1)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップをバイアスするように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と、
k)該フィードバーの近位に配置されたバーであって、該バーは、スピンドルによってバイアスされ、クリップ搬送チャネルのシーリングとフロアとの間に収納されており、該クリップ搬送チャネルは、遠位窓を含む、バーと
を備えており、
該クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させ、該バーが、該遠位窓と実質的に一直線に並ぶときに、該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させ、該第2の位置にある該フィードバーは、該アクチュエータが、近位的に移動することを防止し、その結果として、該爪が、該ラックの該ラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが長手方向に移動することを防止する、装置。
【0032】
(項目2)
上記フィードバーは、近位フィンを有し、該フィンは、上記アクチュエータが、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0033】
(項目3)
上記フィードバーは、1対の近位フィンを有し、少なくとも1つは、上記アクチュエータが、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0034】
(項目4)
上記フィードバーは、1対の近位フィンを有し、該1対は、接続されており、「U」字の形状を有しており、そのうちの少なくとも1つは、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0035】
(項目5)
上記アクチュエータは、近位窓を有し、上記フィンは、該窓と係合することによって、該アクチュエータが、上記第2の位置において近位的に移動することを防止する、項目2に記載の装置。
【0036】
(項目6)
スプリングおよび上記バーは、上記クリッププッシャのチャネルに配置されており、該スプリングは、該バーの下に位置する、項目1に記載の装置。
【0037】
(項目7)
上記バーは、弾力のある部材である、項目1に記載の装置。
【0038】
(項目8)
上記ラックおよび上記爪は、上記ハンドルに位置する、項目1に記載の装置。
【0039】
(項目9)
上記複数のラチェット歯を有する上記ラックは、上記ハンドル部分と接続されており、上記爪は、上記アクチュエータと接続されている、項目1に記載の装置。
【0040】
(項目10)
上記遠位窓は、上記クリップ搬送チャネルの端に位置する、項目1に記載の装置。
【0041】
(項目11)
上記爪は、上記ラックと係合しており、上記クリップ搬送チャネル内にクリップが1つもないときに、該爪および該ラックは、上記アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0042】
(項目12)
上記爪は、上記ラックと係合しており、上記クリップ搬送チャネル内の上記複数のクリップのうちの2つのクリップがあるときに、該爪および該ラックは、上記アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0043】
(項目13)
上記フィードバーは、上記第2の位置にあり、
該フィードバーは、上記アクチュエータが近位的に移動することを防止することによって、上記ラックの実質的に中間位置において、上記爪を該ラックの上記歯と係合するように操作し、
該爪および該ラックは、係合しており、該係合によって該アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0044】
(項目14)
上記第2の位置において、上記フィードバーは、上記長手軸と平行ではない、項目1に記載の装置。
【0045】
(項目15)
上記フィードバーは、最初の位置から上記第2の位置に移動し、該第2の位置は、上記長手軸から偏向された位置である、項目1に記載の装置。
【0046】
(項目16)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあり、該フィードバーは、少なくとも1つの近位フィンを有する、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップをバイアスするように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータであって、該アクチュエータは、近位窓を有する、アクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と、
k)該フィードバーの近位に配置されたバーであって、該バーは、スピンドルによってバイアスされ、クリップ搬送チャネルのシーリングとフロアとの間に収納されており、該クリップ搬送チャネルは、遠位窓を含む、バーと
を備えており、
該クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させ、該バーが、該遠位窓と実質的に一直線に並ぶときに、該スプリングによって偏かされた該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させ、該第2の位置にある該フィードバーは、該アクチュエータの該近位窓と係合する該近位フィンを有し、該フィードバーおよび該アクチュエータの係合は、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を実質的に中間位置において該ラックと係合させるように操作し、
該爪および該ラックは、該アクチュエータが長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【0047】
(項目17)
上記アクチュエータは、スピンドルを備えている、項目16に記載の装置。
【0048】
(項目18)
上記フィードバーは、少なくとも2つの近位フィンを備えている、項目16に記載の装置。
【0049】
(項目19)
上記フィードバーは、端において接続され「U」字の形状を形成する、2つの近位フィンを備えている、項目16に記載の装置。
【0050】
(項目20)
上記スプリングは、リーフスプリングであり、該リーフスプリングおよび上記バーは、上記クリッププッシャの遠位に位置したチャネルに配置され、該リーフスプリングは、上記バーの下に配置され、上記クリップ搬送チャネルのフロアに関して上向きに上記バーを偏かせるように構成されている、項目16に記載の装置。
【0051】
(項目21)
上記バーは、かぎ状の近位端を有し、該かぎ状の近位端は、上記チャネルにおける上記クリッププッシャの一部と係合し、該バーは、該クリッププッシャと遠位に移動する、項目20に記載の装置。
【0052】
(項目22)
上記近位のかぎ状の端は、上記フロア上のアパーチャと係合することによって、上記クリップ搬送チャネルの上記フロアに関して上向きに上記ロックアウトを操作し、
上記バーが該クリップ搬送チャネルの上記遠位窓と一直線に並ぶときに、該近位のかぎ状の端は、該クリップ搬送チャネルのフロアに配置されたアパーチャと係合する、項目21に記載の装置。
【0053】
(項目23)
上記近位フィンは、上記近位窓において休止しており、上記アクチュエータが発射ストロークの間に長手方向に往復運動をするときに、該アクチュエータの移動と干渉しない、項目16に記載の装置。
【0054】
(項目24)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と
を備えており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【0055】
(項目25)
上記装置は、内視鏡の外科的な用途のために構成されている、項目24に記載の装置。
【0056】
(項目26)
上記装置は、肥満学上の手術のために構成された本体を有する、項目25に記載の装置。
【0057】
(項目27)
上記本体は、少なくとも30センチの長さを有する、項目24に記載の装置。
【0058】
(項目28)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、爪と、
k)第2のロックアウトデバイスであって、該第2のロックアウトデバイスは、該ハンドル部分と該アクチュエータとの間の接続を破壊することによって、所定の力が該ハンドル部分に加えられるときに、該ハンドル部分の作動に応答する該アクチュエータの長手方向の運動を防止するように構成されており、該所定の力は、該爪から該ラチェット歯を押しのけるために必要な力よりも小さい、第2のロックアウトデバイスと
を備えている、装置。
【0059】
(項目29)
上記第2のロックアウトデバイスは、上記アクチュエータを上記ハンドルに接続するリンクと、該リンクを該アクチュエータに接続するシャーピンとを含む、項目28に記載の装置。
【0060】
(項目30)
上記シャーピンは、概ね円筒形であり、本体を有し、該本体は、第1の直径と、該第1の直径よりも小さい第2の直径を有する第2の区分とを有し、上記所定の力の適用で、該シャーピンは、第2の直径に沿って壊れる、項目29に記載の装置。
【0061】
(摘要)
体組織に対する外科用クリップの適用のための装置は、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータを含む。該装置は、ジョー部を近接した位置に動かすための、第1および第2のジョー部に隣接して配置されたジョークロージャ部材と、アクチュエータに接続されたラチェット歯を有するラックとを含む。該装置は、一連のラチェット歯と係合し、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止する爪を含む。クリッププッシャは、クリップが該装置から放たれる度に、規則的に増加するように遠位的に移動する。該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、フィードバーは、第2の位置に偏向され、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作する。
【図面の簡単な説明】
【0062】
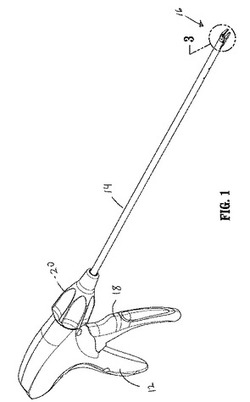
【図1】図1は、外科用クリップアプライヤの斜視図である。
【図2】図2は、図1の外科用クリップアプライヤの別の斜視図である。
【図2A】図2Aは、表示されたパラメータを示す外科用クリップアプライヤの表示の正面図である。
【図3】図3は、外科用クリップアプライヤのジョー構造の拡大された斜視図である。
【図4】図4は、外科用クリップアプライヤの上面図である。
【図5】図5は、外科用クリップアプライヤの第1の側面図である。
【図6A】図6Aは、本体の半分が除去された、外科用クリップアプライヤのハンドルアセンブリの側面図である。
【図6B】図6Bは、外科用クリップアプライヤの本体の半分が除去された、図6Aに対する相対する側面図である。
【図6C】図6Cは、外科用クリップアプライヤのハンドルアセンブリの本体の半分が除去された図6Bの斜視図である。
【図7】図7は、部品が分離された状態での、クリップアプライヤのハンドル筐体の斜視図である。
【図7A】図7Aは、スピンドルと係合するスピンドルリンクの斜視図である。
【図7B】図7Bは、その中に多くのコンポーネントを有するノブの背面図である。
【図7C】図7Cは、ノブ筐体から分解されたノブの斜視図である。
【図7D】図7Dは、ノッチを有する外側管状部材の斜視図である。
【図7E】図7Eは、ブッシングを有する外側管状部材の斜視図である。
【図7F】図7Fは、図7Eのノブ筐体およびブッシングに接続されたノブの背面図である。
【図7G】図7Gは、ドライババーに接続するスピンドルリンクの図を示す。
【図7H】図7Hは、図7Gの線7H−7Hに沿ったドライババーに接続するスピンドルリンクの断面図を示す。
【図8】図8は、爪の斜視図である。
【図9】図9は、駆動部材の斜視図である。
【図9A】図9Aは、アクチュエータプレートの斜視図である。
【図9B】図9Bは、信号デバイスの斜視図である。
【図9C】図9Cは、LCDレバーの斜視図である。
【図9D】図9Dは、ウイッシュボーンリンクの斜視図である。
【図10】図10は、部品が分離された状態での、外科用クリップアプライヤの斜視図である。
【図10A】図10Aは、フィードバーの斜視図である。
【図10B】図10Bは、フォロワおよび外科用クリップの斜視図である。
【図10C】図10Cは、トリップブロックの相対する斜視図である。
【図10D】図10Dは、トリップブロックの相対する斜視図である。
【図10E】図10Eは、スピンドルの斜視図である。
【図10F】図10Fは、図10Eの詳細の拡大されたエリアである。
【図10G】図10Gは、図10Eの詳細の拡大されたエリアである。
【図11】図11は、スピンドルおよびドライバの遠位端の斜視図である。
【図12】図12は、トリップレバースプリングがスピンドル上にあるトリップレバーの斜視図である。
【図13】図13は、ウェッジプレートの斜視図である。
【図13A】図13Aは、図13のウェッジプレート上の「C」状の窓の斜視図である。
【図14】図14は、フィラコンポーネントの相対する斜視図である。
【図14A】図14Aは、フィラコンポーネントにおけるスプリングバー部材の上にある回転可能な部材の分解図である。
【図15】図15は、フィラコンポーネントの相対する斜視図である。
【図16】図16は、回転アセンブリの斜視図である。
【図17】図17は、オーバープレッシャアセンブリの斜視図である。
【図18】図18は、スピンドルおよびジョーアセンブリの斜視図である。
【図19】図19は、図18のスピンドルおよびジョーアセンブリの詳細の拡大されたエリアであり、フィードバーおよびプッシャはフィードバーに接続されている。
【図20】図20は、図18の詳細の拡大されたエリアである。
【図21】図21は、外科用クリップアプライヤの遠位端の拡大図であり、外側部材は除去されている。
【図22】図22は、外科用クリップアプライヤの斜視図であり、部品は除去され、クリップチャネル部材およびフォロワが多くのクリップを傾けている。
【図23】図23は、図22の詳細での拡大されたエリアである。
【図24】図24は、図22の詳細の拡大されたエリアである。
【図25】図25は、図22の詳細の拡大されたエリアである。
【図26】図26は、スピンドル、ドライバおよびジョーアセンブリの斜視図である。
【図27】図27は、図26の詳細の拡大されたエリアである。
【図28】図28は、カムリンクおよびウェッジプレートアセンブリの斜視図である。
【図29】図29は、図28の詳細の拡大されたエリアである。
【図30】図30は、図29の詳細の拡大されたエリアである。
【図31】図31は、フィラコンポーネントおよびジョーアセンブリの斜視図である。
【図32】図32は、図31のジョーアセンブリの拡大された斜視図である。
【図33】図33は、ウェッジプレートおよびドライバを含むスピンドルの遠位端の斜視図である。
【図34】図34は、ウェッジプレートおよびドライバを含むスピンドルの遠位端の斜視図であり、図33における、ウェッジプレートは除去されている。
【図35】図35は、発射の前の状態での外科用クリップアプライヤの、部分的に断面で示されている側面図である。
【図36】図36は、図35の詳細の拡大されたエリアである。
【図36A】図36Aは、ロックアウトメカニズムの第1の横側面図である。
【図36B】図36Bは、ロックアウトメカニズムを示す図36Aの第2の相対する横側面図である。
【図36C】図36Cは、ラチェットアームを有するロックアウトメカニズムを示す図36Aの別の第1の横側面図である。
【図36D】図36Dは、図36Cの線36D−36Dに沿ったロックアウトメカニズムの断面図である。
【図36E】図36Eは、ロックアウトメカニズムの第1の回転可能な部材、第2の回転可能な部材、および第3の回転可能な部材を示す斜視図である。
【図36F】図36Fは、ロックアウトメカニズムの第1の回転可能な部材の斜視図である。
【図36G】図36Gは、ロックアウトメカニズムの第3の回転可能な部材の斜視図である。
【図36H】図36Hは、ノッチを有するロックアウトメカニズムの第2の回転可能な部材の斜視図である。
【図36I】図36Iは、図36Hの図と相対するロックアウトメカニズムの第2の回転可能な斜視図であり、多くの歯を示している。
【図37】図37は、図35の詳細の拡大されたエリアである。
【図38】図38は、トリップレバーを示す図37の詳細の拡大されたエリアである。
【図39】図39は、フォロワを示す図37の詳細の拡大されたエリアである。
【図40】図40は、カムリンクを有する図37の外科用クリップアプライヤの遠位端の、断面で示された側面図である。
【図41】図41は、図40の詳細の拡大されたエリアである。
【図41A】図41Aは、スプリングバー部材と係合する回転可能な部材を有するフィラコンポーネントの上面図である。
【図41B】図41Bは,図41の線41B−41Bに沿った外科用クリップアプライヤの遠位端の断面図である。
【図42】図42は、フィードバーがクリップと係合する図37の外科用クリップアプライヤの遠位端の、断面で示された側面図である。
【図42A】図42Aは、図42の詳細の拡大されたエリアである。
【図43】図43は、ウェッジプレートおよびジョーアセンブリの斜視図である。
【図44】図44は、図43の詳細の拡大されたエリアである。
【図45】図45は、線45−45に沿って取られた図43上面図である。
【図46】図46は、ジョーおよびウェッジプレートを示す図45の詳細の拡大されたエリアである。
【図47】図47は、ウェッジプレートおよびカムリンクを示す図45の詳細の拡大されたエリアである。
【図48】図48は、最初のストロークの始まりでのハンドル筐体の、断面で示される側面図である。
【図49】図49は、ラックおよび爪を示す図48の詳細の拡大されたエリアである。
【図49A】図49Aは、可聴クリックレバーおよびリブを示す図48の詳細の拡大されたエリアである。
【図50】図50は、図49に類似した図48の詳細の拡大されたエリアである。
【図50A】図50Aは、図48のロックアウトメカニズムの詳細の拡大されたエリアである。
【図51】図51は、フィードバーおよびトリップレバーの、断面で示される側面図である。
【図52】図52は、フォロワの、断面で示される側面図である。
【図53】図53は、スピンドルおよびカムクランクを有する外科用クリップアプライヤの内視鏡部分の、断面で示される側面図である。
【図54】図54は、スピンドル運動を示す図53の詳細の拡大されたエリアである。
【図55】図55は、カムスロットにおけるカムリンクの運動を示すウェッジプレートおよびフィラコンポーネントの上面図である。
【図56】図56は、クリップを前進させるフィードバーを示す、断面で示される側面図である。
【図57】図57は、遠位的に動くウェッジプレートおよびカムリンクの上面図であり、ウェッジプレートはフォロワに対して動き、回転可能な部材は回転し、スプリングバー部材と接触している。
【図58】図58は、ジョーに入るクリップを示す、断面で示される側面図である。
【図59】図59は、カムリンクおよびウェッジプレート運動のさらなる上面図であり、スピンドルのカム特徴はカムリンクと接触している。
【図60】図60は、ジョー構造に入るウェッジプレートの上面図である。
【図61】図61は、ウェッジプレートの丸みのある遠位端が装填のためにジョー構造を開いている様子を示す斜視図である。
【図62】図62は、ウェッジプレートのカムスロットにおいてカムリンクのさらなる前進を示す上面図である。
【図63】図63は、フィードバーと係合するトリップレバーを示す、断面で示される側面図である。
【図64】図64は、フィードバーが最も遠位位置にある状態でジョーに入ったクリップを示す、断面で示される側面図である。
【図65】図65は、ウェッジプレートの「C」状の窓における回転可能な部材を示す上面図である。
【図65A】図65Aは、フィラコンポーネントのスプリングバー部材を偏向させるウェッジプレートの「C」状の窓における回転可能な部材を示す低面図である。
【図66】図66は、フィードバーとの係合から遊離されるトリップレバーを示す、断面で示される側面図である。
【図67】図67は、ウェッジプレートおよびフィードバーの収縮を示す、断面で示される側面図である。
【図67A】図67Aは、大きなストロークでのトリガを有するハンドル筐体の側面図である。
【図68】図68は、スピンドルのさらなる前進を示す、断面で示される側面図である。
【図69】図69は、ウェッジプレートの収縮およびスピンドルのさらなる前進を示す、断面で示される側面図である。
【図70】図70は、ジョー構造から収縮するウェッジプレートの斜視図である。
【図71】図71は、スピンドルはドライバと係合し、ドライバロックアウト部材はスピンドルと係合する、断面で示される側面図である。
【図71A】図71Aは、ハンドルセクションの側面図であり、クリックレバーは回転可能であることにより、可聴警報のために筐体内のリブと接触する。
【図72】図72は、フルストロークでのトリガを有するハンドル筐体の側面図である。
【図73】図73は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの、断面で示される側面図である。
【図74】図74は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図75】図75は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図76】図76は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図77】図77は、インパクトスプリングを含むオーバプレッシャメカニズムの、断面で示される図である。
【図78】図78は、血管上で形成される外科用クリップの斜視図である。
【図79】図79は、爪リセットの詳細の拡大されたエリアである。
【図80】図80は、収縮するスピンドルを示す、断面で示される側面図である。
【図81】図81は、フィラコンポーネントの回転可能な部材がリセットするのを示す上面図である。
【図82】図82は、カムリンクがウェッジプレート内でリセットするのを示す上面図である。
【図83】図83は、カムリンクがウェッジプレート内でリセットするのを示す上面図である。
【図84】図84は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図85】図85は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図86】図86は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図87】図87は、フィラコンポーネント、ウェッジプレート、リンクカムおよびスピンドルを有するクリップアプライヤの別の実施形態の分解図である。
【図88A】図88Aは、ウェッジプレートおよびスピンドル上に休止するフィラコンポーネントの上面図である。
【図88B】図88Bは、フィラコンポーネントは除去されている状態で、スピンドル上で休止しているリンクカムおよびウェッジプレートの上面図である。
【図88C】図88Cは、スピンドル上で休止しているリンクカムおよびウェッジプレートの上面図であり、スピンドルのカムスロットは、図示目的のために想像線で示されている。
【図89】図89は、ウェッジプレートと係合し、図88Cの窓92に沿ってスピンドルのカムスロットにおいて横断するリンクカムのクローズアップ図である。
【図90】図90は、本クリップアプライヤの代替的な信号装置の第1のコンポーネントの斜視図である。
【図91】図91は、図90の信号デバイスの第1のコンポーネントの上面図である。
【図92】図92は、第1のコンポーネントの側面図である。
【図93】図93は、第1のコンポーネントのチャネルの正面図である。
【図94】図94は、本クリップアプライヤの代替的な信号デバイスの第2のコンポーネントの斜視図である。
【図95】図95は、リブ部分および横クリップストリップを有する本クリップアプライヤのハンドル部分の斜視図である。
【図96】図96は、組み立てられた信号デバイスを有するハンドル部分の斜視図である。
【図97】図97は、血管に適用されたクリップの斜視図である。
【図98】図98は、スプリングの側面図である。
【図99】図99は、本開示の別の実施形態によるクリップ搬送チャネルの上面図である。
【図100】図100は、図99のクリップ搬送チャネルの拡大図を示す。
【図101】図101は、ロックアウトバーの上面図を示す。
【図102】図102は、図101のロックアウトバーの側面図を示す。
【図102A】図102Aは、図101のロックアウトバーの斜視図を示す。
【図103】図103は、図101および図102のロックアウトバーならびに図98のスプリングの部分的組立図を示す。
【図104】図104は、クリップフォロワの上面図を示す。
【図105】図105は、遠位ノーズおよび一対の近位フィンを有するフィードバーの側面図を示す。
【図106】図106は、クリップフォロワのチャネルにおける図101のロックアウトバーの上面図である。
【図107】図107は、フィードバーの遠位開口部の中に延びているロックアウトバーを示す。
【図108】図108は、フィードバーの遠位開口部の中に延びているロックアウトバーを有するクリップアプライヤの実施形態の別の図を示す。
【図109】図109は、カバーが除去され、フィードバーの遠位開口部の中に延びているロックアウトバーを示すクリップアプライヤの実施形態の別の図を示す。
【図110】図110は、カバーおよびフィードバーが除去され、フィードバーの中にロックアウトバーを示すクリップアプライヤの実施形態の別の図を示す。
【図111】図111は、ロックアウトバーおよびスプリングが、クリップフォロワのチャネルの中にあるクリップフォロワの別の底面図を示す。
【図112】図112は、図111の線16−16に沿ったチャネルの中にロックアウトバーおよびスプリングを有するクリップフォロワの断面図である。
【図113】図113は、遠位ノーズおよび遠位開口部を有するフィードバーの上面図である。
【図114】図114は、近位窓を有するクリップアプライヤのスピンドルの断面図である。
【図114A】図114Aは、近位窓を有するクリップアプライヤのスピンドルの断面図である。
【図115】図115は、近位窓を有するクリップアプライヤのスピンドルの底面図である。
【図116】図116は、図114のスピンドルの窓の拡大図である。
【図117】図117は、リセットされるか、または「休止」もしくは定位置にある爪およびラックの側面図である。
【図118】図118は、中間位置にあり、スピンドルの収縮を妨げるように構成されている爪およびラックの側面図である。
【図119】図119は、本開示によるシャーピンの斜視図である。
【図120】図120は、スピンドルをロックアウトしているラックおよび爪を示すクリップアプライヤの側断面図である。
【図121】図121は、トリガの最初の運動を示すクリップアプライヤの側断面図である。
【図122】図122は、トリガのさらなる運動を示すクリップアプライヤの側断面図である。
【発明を実施するための形態】
【0063】
(実施形態の詳細な説明)
様々な実施形態が、図面を参照して以下本明細書に記述される。
【0064】
外科用クリップの挿入中に、外科用クリップアプライヤのジョーを間隔を置いて安定した位置に維持するように構成されたジョーコントロールメカニズムを有する新規な内視鏡外科用クリップアプライヤが開示されている。新規な内視鏡外科用クリップアプライヤは、ロックアウトメカニズムも有している。ロックアウトメカニズムは、残りの止血クリップがないときに、外科用クリップアプライヤが発射されることを防ぐ。新規な内視鏡外科用クリップアプライヤは、クリップが発射されたことを外科医に警告する警告デバイスも有している。開示されたジョーコントロールメカニズム、ドライバロックアウトおよび警報デバイスはすべて内視鏡外科用クリップアプライヤに示されかつ記述されている一方、開示されたメカニズムは一対の圧縮可能なジョーを有する任意の外科用クリップアプライヤまたは別の器具に適用可能であることには留意されるべきである。参照が図面に対してなされ、様々な図を通して、同様な参照番号は、同様な要素を指す。
【0065】
本開示の新規な内視鏡外科用クリップアプライヤが開示されている。ここで図1を参照して、外科用クリップアプライヤ10は、ハンドルアセンブリ12およびハンドルアセンブリ12から遠位に伸びる細長い管状部材14を有する内視鏡部分を一般的に有する。ハンドルアセンブリ12は、熱可塑性材料から作られ、細長い部材は、生体適合性材料から作られる。一実施形態においては、材料は、ステンレススチールまたは別の実施形態においてはチタニウム材料もしくは合金であり得る。一対のジョー16が、管状部材14の遠位端に取り付けられている。ジョー16はトリガ18によってアクチュエートされる。トリガは、ハンドルアセンブリ12に移動可能に取り付けられている。
【0066】
ジョー16は、適切な好適な生体適合性材料、例えばステンレススチール、チタニウムまたは適切な合金からも形成される。内視鏡部分は、ノブ20も有している。ノブ20は、ハンドルアセンブリ12の遠位端に回転可能に取り付けられ、細長い管状部材14に接続されて、細長い管状部材14の長手方向の中心軸に対して、細長い管状部材14およびジョー16の360度回転を提供する。クリップアプライヤ10の重要な局面は、ノブ20が、外科医の指を使用して簡単に回転されるような適切な構成を有することであり、以下に詳細に論議される。
【0067】
ここで図2を参照して、内視鏡外科用クリップアプライヤ10は、ディスプレイ22を有している。ディスプレイ22は、当技術分野で公知の任意のデバイスであり得、イベントの指示を提供する。イベントは、クリップアプライヤ10の手順または動作に関連し得る。好ましい実施形態におけるディスプレイ22は、液晶ディスプレイであり得る。しかしながら、別の実施形態において、ディスプレイ22は、プラズマディスプレイ、1つ以上の発光ダイオード、発光用のディスプレイ、マルチカラーディスプレイ、デジタルディスプレイ、アナログディスプレイ、パッシブディスプレイ、アクティブディスプレイ、いわゆる「捻れネマティック」ディスプレイ、いわゆる「スーパー捻れネマティック」ディスプレイ、「デュアルスキャン」ディスプレイ、反射ディスプレイ、バックライトディスプレイ、アルファニューメリックディスプレイ、モノクロディスプレイ、いわゆる「低温ポリシリコン薄膜トランジスタ」またはLPTS TFTディスプレイ、または手順もしくはクリップアプライヤ10に関するパラメータ、情報もしくはグラフィックスを示す任意の他のディスプレイ22であり得る。一実施形態において、ディスプレイは液晶ディスプレイ22または「LCD」である。LCD22は、クリップアプライヤ10の1つ以上の動作パラメータを外科医に表示する白黒の、またはカラーディスプレイであり得る。ここで図2Aを参照して、LCDディスプレイ22の正面図が示されている。ディスプレイ22は、表示されたパラメータを示す。一実施形態において、表示されるパラメータは、残りのクリップの量、使用されたクリップの数、位置パラメータ、手術の使用時間、または手順の任意の他のパラメータであり得る。LCD22は、テキスト、グラフィックまたはそれらの組み合わせであり得る。一実施形態において、LCD22は、LCD22バッテリとLCD22の接触との間に配置され、バッテリが格納中にドレインされることを防ぐMylarまたは別のポリメトリック絶縁材料で作られているタブを有し得る。タブは、クリップアプライヤ10から延びていることにより、タブの除去を可能にする。いったん除去されると、タブはクリップアプライヤ10から引き抜かれ、バッテリがLCD22の電気的な接触と接触し、LCD22に電気が通じることを可能にする。本クリップアプライヤ10の一実施形態において、LCD22は、ディスプレイを拡大するレンズを有している。LCD22のレンズは、任意の所望のサイズにディスプレイを拡大することにより、外科医が離れたところから容易にディスプレイを読み取ることを可能にする。ここで図3を参照して、ジョー16は、単一の外科用クリップをその中に受けるためのチャネル24を有している。公知のように、外科用のクリップは、例えば身体の空洞などに止血クリップを適用するためのクリップアプライヤ10の装填構造によってチャネル24に適用または置かれ得る。
【0068】
ここで図6Aを参照して、内視鏡外科用クリップアプライヤ10のハンドルアセンブリ12は、ハンドルアセンブリ12の第1の開いた横側から示されている。内視鏡外科用クリップアプライヤ10は、ウイッシュボーンリンク26に接続されているトリガ18を有している。ウイッシュボーンリンク26は、一端がトリガスロット28を介して、トリガ18に接続され、他端には第1および第2のウイッシュボーン状部材30、32を有している部材である。第1および第2のウイッシュボーン状部材30、32は、駆動部材36を受けるためのスペース34を形成する。
【0069】
駆動部材36は、図示されているようにハンドルアセンブリ12の長手方向に配置された実質的に平坦な部材であり、1つ以上の駆動構造を動かしてジョー16を装填し、アクチュエートして完全に形成されたクリップを形成し、それから次のクリップ適用のために最初の位置にリセットするように意図されている。リターンスプリング38は、駆動部材36を囲むように配置されている。駆動部材36は、駆動メカニズムに接続されてクリップアプライヤ10を発射し、適切に接続され、トリガ18がアクチュエートされかつウイッシュボーンリンク26が駆動装置36を長手方向方式かまたは遠位方式に前進させた後、リターンスプリング38は、駆動部材36およびトリガ18を、次のクリップ適用のためにもとの位置に戻す。
【0070】
駆動部材36は、有利である。いったん駆動部材36が遠位的に前進し始めると、中間位置での動きを妨げることによって、オープンクリップアプライヤ10が完全にアクチュエートする前にトリガ18が不慮的に戻ることを、駆動部材36は防ぐ。駆動部材36は、ラック40を有している。ラック40は、その上側42に配置されている。
【0071】
ラック40は、多くの歯44を有し、歯44は、別の相補的な表面と係合して、外科用クリップアプライヤ10が完全にアクチュエートされる前に、トリガ18および駆動部材18が不慮的にもどることを防ぐ。外科用クリップアプライヤ10は、爪リターンスプリング48を有している爪46を有している。爪46は、爪スプリング48で傾かされてラック40の歯44と係合する。歯44および爪46は、以下本明細書に記述されているように、トリガ18が完全にアクチュエートされる前にトリガ18が解放されることを防ぐ。
【0072】
ここで図6Bを参照して、クリップアプライヤ10は、アクチュエータプレート50をさらに有している。アクチュエータプレート50は、ハンドルアセンブリ12に長手方向に配置されている。アクチュエータプレート50は、駆動部材36より下に配置され、LCDレバー52に動作可能に接続されている。
【0073】
ここで図6Bを参照して、LCDレバー52は、LCDディスプレイ22に動作可能に接続されるための好適な構造である。レバー52は、LCDディスプレイ22における好適なメカニズムまたはコンタクトを動かし、LCDディスプレイ22をアクチュエート可能としてクリップアプライヤ10の1つ以上の動作パラメータを表示するようにする。一実施形態において、アクチュエータプレート50は、LCDレバー52に接続され、対応するLCDディスプレイ22の構造またはコンタクトを動かして外科医が発射しなければならない残りのクリップの量を表示するようにする。別の実施形態において、ディスプレイは多くの発光ダイオード、液体プラズマディスプレイ、電子的デバイスまたはディスプレイ、色が変わって見えるディスプレイまたはその組み合わせであり得る。
【0074】
ここで図6Cを参照して、アクチュエータプレート50は、信号デバイス54をさらに有している。信号デバイス54は、アクチュエータプレート50に接続され、オープンクリップアプライヤ10が外科用クリップを発射したという可聴の信号をユーザに提供し得るデバイスである。信号デバイス54は、クリップアプライヤ10がいったん発射されると、音を発して、外科医に可聴のフィードバックを提供する。別の実施形態において、信号デバイス54は、特徴的な音を発する別の電子的な装置であり得る。信号デバイス54は、ハンドルまたはトリガの偏向、クリップの圧縮、クリップの負荷、新しいクリップの負荷、すべてのクリップの使い尽くしに応答して音を発し得、またはクリップアプライヤ10イベントに依存していくつかの異なる音を発し得る。特徴的な音は、クリック音(click)、チャープ音(chirp)、音、声、録音、音の組み合わせ、または任意のデシベルレベルでの任意の音響波であり得る。信号デバイス54は、クリップアプライヤ10のイベントに応じて識別をさらに提供し得る。一実施形態において、信号デバイス54は、通常の動作中に音を発し得、イベントの起こりと同時に音の発信を止める。様々な構成が可能であり、すべては本開示の範囲内にある。
【0075】
さらに、図6Cを参照して、クリップアプライヤ10は、ロックアウトメカニズム56をさらに有している。ロックアウトメカニズム56は、クリップアプライヤ10に格納されたクリップの量が使い尽くされたとき、外科医がオープンクリップアプライヤ10をクリップなしで発射するのを防ぐための構造である。ロックアウトメカニズム56は、トリガハンドルAにおける相補的な構造と係合して、以下にさらに詳細に記述されている方式で、トリガ18がウイッシュボーンリンク26をさらに動かし、かつアクチュエートすることを妨げる。
【0076】
ここで図7を参照して、相対する側からのハンドルアセンブリ12の分解図が示されている。外科用クリップアプライヤ10は、実質的に「S」形状の部材であるアクチュエータプレート50を有している。図7および図9Aに最もよく示されているように、アクチュエータプレート50は、第1の直交形状の窓60を有している第1の部分58、および第2の直交形状の窓64を有している第2の部分62を有している。
【0077】
アクチュエータプレート50の第1の端に、アクチュエータプレート50は、一対のタイン66を形成する角の取られた曲線部分を有している。相対する第2の端68は、突起70を有している。突起70は、LCDレバー52上でチャネル72と係合する。ピン74は、第1の直交形状の窓60を介して配置され、アクチュエータプレート50を、ウイッシュボーンリンク26を介して駆動部材36に接続している。この方式で、トリガ18が遠位的に駆動部材36を動かすとき、接続ピン74は第1の窓60を介して動かされるとすぐ、いったん接続ピン74が第1の直交形状の窓60の外側遠位エッジ76に接触すると、類似の方法で遠位的にアクチュエータプレート50をも動かす。
【0078】
再び、図7および図9Bを参照して、クリップアプライヤ10は可聴クリックレバー78を有する信号デバイス54をさらに有している。可聴クリックレバー78は、アクチュエータプレート50と相対する側にあり、第2の窓64を通り抜ける。信号デバイス54は、可聴クリックスプリング80をも有している。信号デバイス54は、アクチュエータプレート50による長手方向の遠位運動と同時に、相補的なハンドル表面上で回転しかつ偏向する可聴クリックレバー78をも有している。アクチュエータプレート50は、可聴クリックレバー78(図9B)のポスト77を偏向させ、レバー78を筐体上の表面リブと接触させる横側82(図9Aに図示)を有する第2の窓64を動かす。この接触で、クリップアプライヤ10が外科用クリップを発射したという可聴の警報または可聴の信号が生じる。
【0079】
図7を参照して、クリップアプライヤ10は、第1のレバー部分84、開口部86およびチャネル72を有する曲線部材88と共に、回転可能な部材であるLCDレバー52(図9Cに最もよく見える)をさらに有している。チャネル72は、アクチュエータプレート50上で突起70とコミュニケートし、図7に示される第1のハンドル筐体部分94とコミュニケートするペッグ92を有する。
【0080】
図7を参照して、LCD22はLCDレンズ98、およびLCD22に接続されているLCDカウンタコンタクトプレート100を有するLCDユニット96を有している。LCDカウンタコンタクトプレート100は、アクチュエートされるとすぐ、LCDディスプレイ22を前のパラメータから現在のパラメータ、例えば一実施形態において、クリップアプライヤ10における残りのクリップの量へ変える。
【0081】
クリップアプライヤ10は、爪スプリング48を有する爪46をも有している。爪46は、ラック40の歯44と係合する端を有している。
【0082】
図7を参照して、クリップアプライヤ10は、アーム104およびアーム104に接続されている爪106を有する第1の回転可能部材またはシャフト102と共にロックアウトメカニズムをさらに有している。第1の回転可能部材102は、概略円筒状であり、スプリング105を介して、ハンドルの相補的な表面に接続されている。一実施形態において、第1の回転可能部材102は、ロックアウトアームである。
【0083】
ロックアウトメカニズム56は、第1の回転可能部材102からオフセットされている第2の回転可能部材112を有している。一実施形態における第2の回転可能部材112は、ロックアウトホイールであり、その周りに間隔をおいて配置された多くの歯116を有するロックアウトホイール112の内側の円周114を有する概略円形の構成を有する。ロックアウトホイール112は、それに接続されている第1のアーム122を有する第3の回転可能な部材120に開口部を介して接続されている最も中心のポスト118を有し、ポスト118は、ハンドル部分12にさらに接続されている。トリガ18が発射されるとき、ハンドル部分12に接続されている第1の回転可能な部材102とトリガ18に接続されている第3の回転可能部材120との間に相対的な動きが存在する。こうして、ロックアウトホイール112は、最も中心のポスト118がハンドル部分12に接続されるとき、所定の量回転するように意図されている。ロックアウトホイール112が回転するとき、第1の回転可能部材102の爪106は前進する。トリガ18が、発射されてクリップを発射するたびに;爪106は、歯116の数の間の1単位長さを横断し、本明細書に論議される有利なラチェティング(ratcheting)配列のために、そこで休止する。ロックアウトホイール112は、その放射状部分において直交形状のノッチ110であるエスケープノッチ110を有している。エスケープノッチ110は、第1の回転可能部材102の爪106が、ロックアウトホイール112の内側の位置または内側の円周114からエスケープノッチ110を介して外側へ横切り、参照文字Aによって示されるトリガ内の相補的な構造と係合し、トリガ18がウイッシュボーンリンク26をさらに動かしかつアクチュエートすることを防ぐことを可能にする。
【0084】
クリップアプライヤは、シャフトアセンブリ124を有するノブ20をさらに有している。スピンドルリンク126は、図7Aに示されるスピンドル128に接続する。ここで図7Gおよび図7Hを参照して、ドライババー36はスピンドルリンク126と接続する。ジョー16に相対する近位の側のスピンドルリンク126は、スピンドルリンクフック185を有している。ドライババー36は、角度のついたフック部材186を有している。角度のついたフック部材186は、ドライババー36の遠位側184にある。ここで、図7Gの線7H−7Hに沿った断面図を参照して、ドライババー36の角度のついたフック部材186は、スピンドルリンクフック185と嵌合する。図示のように、駆動部材36は、このように遠位方式でスピンドルリンク126を前進させる。再びここで図7Aを参照して、(スピンドルリンクフック185に対して)スピンドルリンク126の相対する遠位端は、円形ボス接続188を用いてスピンドル128に接続されている。この方式で、スピンドル128は、参照矢印Bによって示されるように、スピンドルリンク126から独立して回転し得る。
【0085】
ここで図7Bを参照して、図5の線7B−7Bに沿ってノブ20の断面図が示されている。ノブ20は、ノブ20の開口部またはボア134において互いに接続されている第1の本体半分130および第2の本体半分132を有している。
【0086】
ここで図7Cを参照して、ノブ20は、ノブ20と接続する平面先細り表面138を有するノブ筐体136と接続する。再び図7Bおよび図7Cを参照して、ノブ20はそれを貫通して配置されているボア134を有している。ノブ筐体136は、管状部材142を介して配置された第1のスロット144および第2のスロット146を有する外側管状部材142をさらに有し、外側管状部材142は、そのそれぞれの相対する横側に、「C」状の第1の開口部148、および第2の「C」開口部150を有している。
【0087】
特に、ノブ筐体136は、非常に有利である。なぜならば、ノブ筐体136は、外科医が人差し指を使用することによって単に片手で管状部材14を回転させ、ノブ20の横側に触れて、時計回りかまたは反時計回りかいずれの方向にでもノブ20を回転させることを可能にするのに適切な細長い円筒状の形状を有するからである。これは、一部の外科医によって嫌われる管状部材14を両手で回転させる動作を未然に防ぎ、管状部材14のより人間工学的な動作または回転を提供する。
【0088】
ここで図7Cを参照して、ボア134の内表面のノブ20は、第1のアーム152および第2のアーム154を有しており、これらは、外表面から反対にボア134の中に延びており、それぞれノブ筐体136の第1の「C」状の開口部148および第2の「C」状の開口部150と嵌合している。
【0089】
再び、図7Bおよび図7Eを参照して、外側チューブ14は、第1の開口部158’および第2の開口部160’を有するブッシング156をさらに有し、第1のピン162は第1の開口部158’を通って延びており、第2のピン164は第2の開口部160’を通って延びている。ここで、図7Eを参照して、ブッシング156は、ブッシング156の半径方向の位置から延びているタブ166をさらに有する。タブ166は、ノブ筐体136の中のノッチと係合する。ブッシング156は、第2のタブ166’も有する。第2のタブ166’も、その回転のために図7Dに示される管状部材14におけるノッチ168と係合する。様々なコンポーネントをアクチュエートするために、スピンドル128は、管状部材14を通って長手方向の動きのために取り付けられている。
【0090】
ここで、図8を参照して、前に記述された爪46の斜視図が示されている。爪46は、開口部169が貫通して配置されている3角形状の部材である。爪46は、上側176に多くの角度のついた表面170、172、174をも有し、かつ相対する底側180には歯係合構造178を有することにより、図6Dの駆動部材36において示されるようにラック40の歯44と係合する。図示されているように、駆動部材36は、開口部182を有することにより、図9Dのウイッシュボーンリンク26と嵌合し、かつ第1の側181、および遠位方式のスピンドル128の前進のために角度のついたフック部材186を有する、相対する第2の側184を有する。
【0091】
ここで図9Dを参照して、ウイッシュボーンリンク26は、ピン74によりアクチュエータプレート50の図9Aの第1の長手方向状の窓60を介して駆動部材36に接続されている。突起70を有するアクチュエータプレート50は、図9CのLCDレバー52におけるチャネル72と接続し、アクチュエータプレート50は、図9Bに示される信号デバイス54にさらに接続される。信号デバイス54は、開口部188を有することにより、ハンドル筐体と嵌合する。可聴クリックレバー78は、弾力性の表面191を有する球根状の端190を有することによりクリックレバー78の回転と同時に、球根状の端191は別のハンドル表面またはリブと鋭く接触し、これにより、音響波がハンドルアセンブリ12から発され、外科用クリップが発されたことを知らせる。信号デバイス54は、さらにポスト77を有し、ポスト77は、図9Aの第2の窓64を介して接続され、アクチュエータプレート50が遠位的に動くときレバー54を回転させる。
【0092】
ここで図10を参照して、オープンクリップアプライヤ10の内視鏡部分16の様々なコンポーネントの分解図が示されている。クリップアプライヤ10は、外側管状部材14を有している。外側管状部材14は、第1の端192および第2の端194を有する概略円筒形部材である。第1の端192は、ボアを介してスピンドルリンク126に接続されている。述べられたように、スピンドルリンク126は、スピンドル128に接続されている。外側チューブ14は、スピンドル128の周りに配置されている。クリップアプライヤ10は、ピン162、164を有している。ピン162および164は、ブッシング156の横側を介して延伸する。ピン162、164は、ブッシング156に対して内側にバイアスされ、外側管状部材14と接触する。クリップアプライヤ10はさらにスプリング196を有することにより、ブッシング156を前進することから妨げている。スプリング196は、ノブ20に接続されているノブ筐体136に中に配置されている。
【0093】
クリップアプライヤ10は、細長い管状部材14のボアを介して配置された連動スピンドルリンク126をさらに有している。本クリップアプライヤは、多くの異なるアセンブリを有することにより、多くの異なるクリップアプライヤ機能を実行する。クリップアプライヤ10は、スピンドルメカニズム128を有することにより、管状部材14を横断して駆動メカニズムをアクチュエートし、ジョー16を閉じ、完全に形成されるクリップを形成する。ジョー16を装填するために間隔を置いた状態にジョー16を維持するために提供され、いったんジョー16が装填されると収縮するウェッジ機能のためのメカニズムを、クリップアプライヤ10は有する。クリップアプライヤ10は、クリップをジョー16にフィードするフィーダ機能も有している。クリップアプライヤは、クリップ格納機能、および次のその装填のために格納されたクリップを傾かせるクリップフォロワ機能も有している。
【0094】
様々なコンポーネントをアクチュエートするために、図10のノブ20の上に示されるアクチュエーションメカニズムまたはスピンドル128が提供されている。スピンドル128は、細長い管状部材14を介して長手方向の遠位のおよび近位の運動のために取り付けられている。スピンドル128は、遠位端204上に、スピンドル128の遠位端204から延び、選択的にクラミング表面と係合し、外科用クリップの周りでジョー16を閉ざす、ドライババー200およびスライダジョイント202を有するクラミングメカニズムを有している。
【0095】
スピンドル128は、スライダジョイント202上にラッチ部材206、およびスピンドル128上にカムリンク208をさらに有している。ラッチ部材206は、スピンドル128の方向にカムを取り付ける。ラッチ部材20は、スピンドル128の対応するスロットの中にカムを取り付ける。ラッチ部材206は、ドライババー200が遠位的に動くことを可能にする。スピンドル128が遠位的に動いて、スピンドル128とドライババー200との間の所定のドエル(dwell)距離を減じるとき、ラッチ部材206はまた、ドライババー200がジョー16をアクチュエートすることから妨げる。スピンドル128は、カム特徴(feature)210または膨らんでいるエッジを有することにより、遠位的前進中にスピンドル128の長手方向の軸に対して垂直方式に別の構造を動かす。
【0096】
クリップアプライヤ10は、所望の組織への適用に対して1つまたは多くの外科用クリップ300を保持する。クリップアプライヤ10は、細長いクリップチャネル部材302を有することにより、クリップチャネル部材302より上に整列された方式で示される多くの外科用クリップ300を保持している。細長いクリップチャネル部材302は、細長い管状部材14に対して長手方向に動かない。クリップアプライヤ10は、フォロワスプリング308に接続されたフォロワ306を有する。フォロワスプリング308は、クリップチャネル部材302において、クリップを遠位的に作用する。クリップアプライヤ10はチャネルカバー310をも有し、これは、クリップチャネル部材302の上に横たわり、フォロワ306およびフォロワスプリング308およびクリップ300を、クリップチャネル部材302において遠位的に保持しかつ案内する。クリップアプライヤ10は、ノーズ312を有することにより、クリップチャネル部材302を横断してジョー16の間のチャネル24の中に入るクリップ300を方向付ける。
【0097】
クリップアプライヤ10は、フィードバー400も有することにより、クリップ300をジョー16の間のチャネル24の中にフィードする。フィードバー400は、相対的な動きも提供する。ここでクリップチャネル部材302の遠位的な部分を参照して、フィードバー400が示されている。この遠位的な位置でのフィードバー400は、クリップ300をジョー16の間のチャネル24に前進させる。ここでジョー16に相対する近位の位置を参照して、フィードバー400は、プッシャスプリング402(図10)を有している。プッシャスプリング402は、フィードバー400を長手遠位方向に傾かせる。プッシャスプリング402は、トリップブロック406におけるノッチ404の下の相補的な位置に配置されている。トリップブロック406の遠位側で、トリップブロック406は、クリップチャネルカバー部材304に隣接している。フィードバー400は、トリップブロック406より上に示されている。フィードバー400は、フック408を有している。フック408は、トリップブロック406のノッチ404において係合している。クリップアプライヤ10は、案内ピン401をさらに有している。案内ピン401は、プッシャスプリング402を介して配置され、プッシャスプリング402を整列させるために必要である。フック408は、トリップブロック406の下で、案内ピン401およびプッシャスプリング402と係合する。この方式で、フック408は、ノッチ404を介して配置され、案内ピン401を係合する。プッシャスプリング402および案内ピン401は、フィードバー400を傾かせ、フィードバー400が遠位的に前進することを可能にする。さらに、プッシャスプリング402を介して配置された案内ピン401は、それだけで完備したアセンブリを可能にする。スピンドル128がプッシャ400を前進させるために、スピンドル128は、トリップレバー500および傾きスプリング502を有している。トリップレバー500は、フィードバー400と係合され、外科用クリップ300をジョー16の間のチャネル24の中に遠位的に前進させる。
【0098】
クリップアプライヤ100は、ウェッジプレートスプリング602を有するウェッジプレート600も有している。ウェッジプレート600は、くり抜かれた多くの直交形状の窓604を有する平坦なバー状の部材である。ウェッジプレートスプリング602は、ラッチ開口部608内にあるウェッジプレート600におけるタング(tongue)606を取り囲む。ウェッジプレートスプリング602は、ウェッジプレート600が、遠位的に前進させられてジョー16をクリップ装填のために分離した後、遠位的の位置から近位の位置に収縮されることを可能にする。ウェッジプレート600は、窓604とタング606との間にある「C」状の窓610も有する。
【0099】
クリップアプライヤ10は、フィラコンポーネント700を有している。フィラコンポーネント700は、回転可能な部材702およびスプリングバー部材704を有している。スプリングバー部材704は、フィラコンポーネント700に配置された開口部706の中にある。回転可能な部材702は、特定な特別な範囲での動きが可能であり、かつ第1の近位の端708、および第1の端708に相対する第2の相対する遠位端710を有する。回転可能な部材702の動きの範囲は、任意の比較的わずかなまたは任意の比較的大きな、回転または運動の範囲であり得る。本クリップアプライヤ10は、任意の特定な回転度、または任意の特定な運動の方式、例えば円、楕円または任意の幾何学的な回転パターン、原点、軸、座標または運動に、いかなる方式においても制限されない。さらに、部材702は、代替的に、任意の平面のまたは当技術分野で公知の別の不規則な方式で単に動く。様々な構成が可能であり、本開示の範囲内である。
【0100】
クリップアプライヤ10は、ジョー16をさらに有している。ジョー16は、第1のジョー部材16aおよび第2のジョー部材16bで作られている。第1のジョー部材16aと第2のジョー部材16bとの間にはクリップチャネル24がある。理解されるように、ジョー部材16aおよび16bは、内側に動き得、閉じ、圧縮して、チャネル24において完全に形成されるクリップを形成する。ジョー16は、その外側表面に第1の高められたカム取り付け表面212および第2の高められたカム作動面(camming surface)214も有している。第1の高められたカム作動面212および第2の高められたカム作動面214は、ジョー16を閉ざしかつ圧縮するための別の駆動カム作動面の選択的係合を可能にする。
【0101】
ここで、図10Aを参照して、フィードバー400の図が示されている。フィードバー400は、トリップレバー500との係合のための長方形状の窓410を有する長手方向の部材である。フィードバー400は、フィードバーの底側412に配置されたフック408を有している。フィードバー400は、遠位端にプッシャ414をさらに有することにより、チャネル302を搬送するクリップにおける外科用クリップ300と係合しかつ操作する。
【0102】
図10Bに示されるように、フィードバー400は、クリップ搬送チャネル302をスライドさせることによってクリップ300を、クリップ搬送チャネル302において遠位的に押しかつこれに作用するフォロワ306と協働する。図10Cおよび図10Dに示されるように、第1の位置および相対する第2の位置の両方においてトリップブロック406が示されている。
【0103】
上に論議されたように、トリップブロック406は、ノッチ404を有し、また第1のおよび第2の歯をつけられた部材420を形成する角度のついた表面も有する。第1のおよび第2の歯をつけられた部材420の各々は、本明細書で論議されるトリップレバー500の対応する表面との係合のためである。図10Cおよび図10Dのトリップブロック406のノッチ404は、図10Aに示されているフィードバー400のフック408の受け入れのためである。図10Aに示されるフィードバーの窓410からトリップレバー500を遊離するために、図10Cおよび図10Dトリップブロック406は、図10に示されるトリップレバー500と係合する第1のおよび第2の歯をつけられた部材420を有している。第1のおよび第2の歯をつけられた部材420は、トリップレバー500を図10Aの窓410から遊離する。
【0104】
ここで図10Eから10Fを参照して、スピンドル128が示されている。図10Fを参照して、スピンドル128は、第1の直交する空洞222および第2の直交形状の空洞224を有することにより、トリップレバー500を受け、かつレバー傾きスプリング502を受ける。第1の直交する空洞222は、ピボティングボス226(図10F)を有することにより、トリップレバー500が第1の位置から第2の回転可能な位置へピボットすることを可能にする。トリップレバー傾きスプリング502は、第2の空洞224の中で休止する。図10に示されているスプリング502は、製造の容易さのために、傾きスプリング502を接続するための任意のボスまたは部材なく、そこに休止する。ここで、図10Gに示されるように、スピンドル128の相対する位置を参照して、スピンドル128は、クラミング特徴210を有する溝209、およびカムリンク208が休止して遠位的に作用されることを可能にする別の空洞228を有する。以下にさらに詳細に論議されるように、スピンドル128は、遠位的に前進してクリップアプライヤ10の駆動コンポーネントと係合する。
【0105】
図12を参照して、トリップレバー傾きスプリング502は、点線で示されるようにスピンドル128の第2の空洞224と連動する第1および第2の湾曲した端504、506を有している。トリップレバー傾きスプリング502は、第2の部材508をさらに有している。第2の部材508は、スピンドル128の通常の表面に相対して、外向きに傾いている。第2の部材508は、トリップレバー500と接触する。トリップレバー500は、回転運動のためピボティングボス226と係合するC状端510、およびトリップレバー傾きスプリング502より上に延びている別の端512を有している。前に論議されたように、トリップレバー500をフィードバー400から遊離するために、トリップブロック406は、選択的にトリップレバー500を係合し得、トリップレバー500をフィードバー400の窓410から遊離し得る角度のついた表面または歯をつけられた表面420を有している。
【0106】
ここで、図11を参照して、スピンドル128は、ウェッジプレート600と係合可能なカムリンク208を有している。カムリンク208は、そこから延びているカムリンクボス230を有している。カムリンク208は、ストローク中にスピンドル128によって遠位的に促される。
【0107】
スライダジョイント202は、チャネル250でのスピンドル128と近位端248で、接続されている。相対する側で、スライダジョイント202は、「T」状端252を有している。T状端252は、ドライババー200と接続されている。スライダジョイント202は、スライダジョイント202における開口部254を介して動くように配置され、別の部材とリンクし、スライダジョイント202がドライババー200を前進させることから妨げるリンクであるラッチ部材206を有し、このようにして、クリップ300をジョー16にフィードする最初のストローク中に、ドライババー200のカム作動面256が、ジョー16を圧縮することから妨げる。
【0108】
図13〜13Aを参照して、ウェッジプレート600が示されている。ウェッジプレート600は、ウェッジプレートスプリング602を有している。ウェッジプレートスプリング602は、ウェッジプレート600の傾き装置を提供する。ウェッジプレート600は、ウェッジプレートスプリング602によって傾かされる。スプリング602は、点線で示されるようにタング606を取り囲む。ウェッジプレート600は、「C」状開口部、またはそこにくり抜かれた窓610を有する。
【0109】
「C」状開口部または窓610は、フィラコンポーネント700の回転可能部材702を選択的に係合する。ウェッジプレート600は、カム表面614を有するカムスロットまたは溝612も有している。カムスロットまたは溝612は、ウェッジプレート600の動きを制御する所定の形状を有している。カムスロットまたは溝612は、スピンドル128におけるカムリンク208と協働して、ウェッジプレート600を遠位的に動かしてジョー16を若干分離することにより装填する。カム表面614もカムリンク208と協働してウェッジプレート600を、管状部材14内で近位的に動かすことにより、ジョー16は、いったん装填されると、チャネル24内でクリップ300を圧縮する。
【0110】
ウェッジプレート600は、丸みのある遠位端616を有することにより、ジョー16を装填のために分離する。ウェッジプレート600は、近位窓622を有することにより、ウェッジプレート600の収縮を制限する。
【0111】
図14および図14Aを参照して、第1の位置および図15に示される第2の相対する位置におけるフィラコンポーネント700が示されている。フィラコンポーネント700はC状端712、およびフィラコンポーネント700の最も中心部分においてピン716によって接続される開口部714を有している回転可能な部材702を有している。回転可能な部材702は、ウェッジプレート600における対応する構造と接続して、ウェッジプレート600の動きを制御する。フィラコンポーネント700の相対する側には、開口部718がある。回転可能な部材702は、第1の端708、および相対する第2の端710を有する。第1の端708は、スプリングバー部材704および回転可能な部材702の間で傾き行動を可能にするスプリングバー部材704との接触によって傾かされる。
【0112】
フィラコンポーネント700は、フィラコンポーネントカムスロット720も有している(図15に図示)。フィラコンポーネントカムスロット720は、カムリンク208のボス230を受けるように構成されている。フィラコンポーネント700は、ストップ722も有することにより、ウェッジプレート600の近位収縮を制限し、かつ部材724も有する。部材724はウェッジプレートタング606およびスプリング602と係合する。
【0113】
ここで、図16〜図17を参照して、スピンドル128および関連する駆動コンポーネントが示されている。ブッシング156は、図17に示されるように、それに接続されるスプリング196を有することにより、ジョー16のオーバーストローク状態を可能にする。スプリング196は、過剰な力がジョー16に適用されることを妨げる。
【0114】
ここで、図18〜図20を参照して、スピンドル128が示されている。フィードバー400が、下向きの態様で延びており(図19)、プッシャ414はクリップ搬送チャネル302の中に延び、クリップ300と係合する。プッシャ414は、クリップチャネル部材302におけるクリップ300の各々を、ジョー16の間のチャネル24の中に前進させる。図19に示されるクリップアプライヤ10の遠位領域を参照して、クリップアプライヤ10は、「C」状部材416を有し、これは、ノーズ312を取り巻き、その周りに配置された組織ストップとして機能する。上に論じられたように、ノーズ312は、チャネル24に導入された単一のクリップを補佐する。クリップアプライヤ10は、多くのT状タブ418も有している。タブ418は、クリップ搬送チャネル302、チャネルカバー310およびノーズ312を共に一体ユニットとして保持するためのものである。
【0115】
図20に示されるジョー16に対して相対する近位側を参照して、スピンドル128は、トリップレバー500を有している。トリップレバー500は、図示のようにフィードバー400の窓410を通って延びており、フィードバー400を遠位的に(管状部材14を介して)前進させ、プッシャ414を遠位的に動かして、クリップ300をジョー16の間のチャネル24に導入する。
【0116】
図21〜図24は、クリップ搬送チャネル302における多くのクリップ300を示す。クリップ搬送チャネル302は、その周りで曲がった多くのフィンガ420を有することにより(図23)クリップ300をクリップ搬送チャネル302の中にサポートしかつ保持する。図24を参照して、フォロワ306の部分的に組み立てられた斜視図を示している。フォロワ306は、クリップ搬送チャネル302に配置され、フォロワスプリング308は、遠位方向にフォロワ306を傾かせかつ前進させる。フォロワスプリング308は、クリップチャネル302におけるクリップ300に力を与える。図21に示されるように、クリップアプライヤ10は、クリップチャネル302上で多くの「T」状タブ418を有することにより、アセンブリを共に維持する。
【0117】
ここで、図25を参照して、クリップアプライヤ10はスピンドル128上にトリップレバー500を有している。トリップレバー500は、スピンドル上側の反対に偏向するように傾かされ、前に論じられたようにトリップレバースプリング502によって傾かされるT状の部材である。ここで図26および図27を参照して、ドライババー200は、組み立てられた位置において、ウェッジプレート600またはジョー16で休止するように配置され、第1および第2の高められたカム取り付け表面212および214を遠位的に横切り、ジョー16を閉ざし、チャネル24におけるクリップ300を圧縮する。
【0118】
ここで図28〜図30を参照して、トリップブロック406、ウェッジプレート600、およびフィラコンポーネント700の組み立てられた相対的な部分が、ここで記述される。スピンドル128に配置されたウェッジプレート600が示されている。
【0119】
図29および図30を参照して、クリップアプライヤ10は、ストップ部材618を有することによりフィラコンポーネント700の運動を制限する。フィラコンポーネント700は、この図においてウェッジプレート600の下に配置されている。ウェッジプレート600は、「C」状の窓610を介して配置された回転可能な部材702を有する「C」状の窓610を有する。ウェッジプレート600は、カム表面614を有するカムスロット612も有する。カムリンク208は、この図において、ウェッジプレート600のトップに配置されている。カムリンク208は、ウェッジプレート600のカムスロット612とインターフェースするカムリンクボス230を有している。
【0120】
図29を参照して、ウェッジプレート600は、タング606の周囲にウェッジプレートスプリング602を有し、タング606の周囲にフィラコンポーネント700の部材724を有する。このようにして、タング606が、フィラコンポーネント700に対して遠位的に動くとき、ウェッジプレート600は近位的に戻るように傾かされる。フィラコンポーネント700は、ウェッジプレート600の近位窓622においてストップ722も有し、フィラコンポーネント700に対するウェッジプレート600の遠位運動をさらに制限する。
【0121】
追加的に、カムリンク208はまた、カムスロット612において遠位的に駆動されるように構成される。追加的に、カムリンク208は、この図においてウェッジプレート600の下に示されたフィラコンポーネントカムスロット720に乗せられるようにも構成される。
【0122】
カムリンク208が、スピンドル128の前進から遠位的に駆動されるとき、カムリンクボス230は、ウェッジプレート600のカム表面614と係合し、ウェッジプレート600を遠位的に駆動する。ウェッジプレート600は、図30に示される境界線624に到着するまで、遠位的に前進する。境界線624で、カムリンクボス231は、図30に示されるフィラコンポーネント700の遊離カム表面726と係合する。
【0123】
遊離カム表面726は、フィラコンポーネントカムスロット720における特徴である。特に、遊離カム表面726は、カムスロット612のカム表面614との係合から、カムリンクボス231を遊離する。この境界点624で、ウェッジプレート600はもはや遠位的に動かない。
【0124】
ここで図31〜図34を参照して、ウェッジプレート600、フィラコンポーネント700およびドライババー200の様々な組み立て部分が論議される。ウェッジプレート600は、スピンドル128上に配置されたフィラコンポーネント700を覆っている。ジョー16は、一対の柔軟なレグ(leg)17a、17bを有している。レグ17a、17bは、ベース部材17cに固定されている。ジョー16は、柔軟なレグ17a、17bに対して遠位端に位置している。一対のロッキングアーム19a、19bが、ベース17cから延びており、一対のタブ21a、21bで終わる。タブ21a、21bは、細長い外側チューブ14における一対の穴(図示されず)と係合することによって、ジョー16を細長いチューブ14に固定する。
【0125】
フィラコンポーネント700は、ジョー16に対してすぐ近位に配置され、細長い外側チューブ14に対して動かない。ここで図31〜図33を参照して、ウェッジコンポーネント600の図が示されており、これは、ドライババー200を覆い、かつスピンドル128上で休止する。図31において、ウェッジプレート600は、フィラコンポーネント700の下にある。図33において、ウェッジプレート600は、ジョーが除去された状態で最もよく示されている。ジョー16は、ウェッジプレート600の丸みのある遠位端616を受けるように構成されている。丸みのある遠位端616は、最初ジョー16を分離する。丸みのある遠位端616は、ジョー16のチャネル24におけるクリップ300の挿入中、ジョー16を、分離され、かつ整列された構成に維持する。
【0126】
ウェッジプレート600は、丸みのある遠位端616を有しており、これは、ジョー16を分離された状態に維持し、特にジョー16の曲がりまたは捩れを防ぐ。ジョー16の各々は、カム特徴23a、23bを有することにより、容易かつ反復可能な態様で、図32に示されるようにジョー16の間でウェッジプレート600の丸みのある遠位端616を案内する。カム特徴23a、23bは、図示されるように、ジョー16の内面にあり、第1の高められたカム作動面212と第2の高められたカム作動面214との間にある。
【0127】
図34を参照して、スピンドル128の図が示されており、これは、スライダジョイント202およびドライババー200を有し、ウェッジプレート600は図示目的のために除去されている。ドライババー200の遠位端は、ドライバカム作動面256を有している。ドライバカム作動面256は、ジョー16に対するドライババー200の遠位運動に応答して、協働し、かつジョー16(図32)の第1および第2の高められたカム作動面212、214の上を動く。
【0128】
ドライババー200の近位端を参照して、ドライババー200は、スライダジョイント202に接続されている。図34に示されるように、スライダジョイント202は、多くのラッチリトラクタ158、160を有している。ラッチリトラクタ158、160は、垂直に延びており、図33に示されるウェッジプレート600における窓604、604を介して延伸するように構成されている。図33に示されるように、これらのラッチリトラクタ158、160は、ジョー16に対するスライダジョイント202の収縮および遠位運動を制限する。本クリップアプライヤ10の一実施形態において、ラッチリトラクタ158が収縮する一方で、ラッチリトラクタ160が運動を制限する。あるいは、ラッチリトラクタ160が収縮する一方で、ラッチリトラクタ158が運動を制限し得る。別の実施形態において、各ラッチリトラクタ158および160は、制限運動および収縮の機能の間で切り替わり得る。さらに別の実施形態において、2つより多くのラッチリトラクタ158、160が提供され得る。様々な構成が、本開示の範囲内において可能である。
【0129】
ターゲット組織、例えば血管の周りにクリップ300をかしめるための、外科用クリップアプライヤ10の動作がここで記述される。ここで図35および図36を参照して、トリガ18は、圧縮されていない状態で示されており、駆動部材36はもとの位置にあり、スプリング38によってバイアスされている。
【0130】
図36Aを参照して、外科用クリップアプライヤ10のロックアウトメカニズム56が示され、ロックアウトメカニズム56はもとの最初の位置にある。図36Aに示されるように、第3の回転可能な部材120のアーム122は、図36Aに示されるようにハンドルアセンブリ12のチャネル121で休止する部分を有している。第3の回転可能な部材120は、ポスト118によってロックアウトホイール112と嵌合する。一実施形態において、第3の回転可能な部材120は、インデクサホイールである。
【0131】
図36Bに示される、相対する図を参照して、ロックアウトホイール112の内周は、多くの歯116およびエスケープノッチ110を有している。エスケープノッチ110は、内周114の周りの位置に配置されている。アーム104および爪106を有する第1の回転可能な部材102は、ロックアウトホイール112からオフセットされ、かつ配置されることにより、爪106は、クリップアプライヤ10が発射されるとき、歯116と選択的に係合する。
【0132】
トリガ18が、発射されたあと、第1の回転可能な部材102が、半径方向に前進させられることにより、爪106が歯116の別の歯と係合するように促される。図36C〜36Eを参照して、ロックアウトホイール112は、クリップ搬送チャネル302内のクリップの数に対して相補的な歯116の所定の数を有することにより、最後のクリップが発射されるとき、爪106はエスケープノッチ110と整列させられ、爪106がエスケープノッチ110の中に入ること、およびロックアウトホイール112から解放されることを可能とする。ここで図36cおよび36d、および図36F〜36Iを参照して、ロックアウトメカニズム56は、ラチェットアーム650および多くのラチェット歯652を有するラチェッティング配列も有している。第3の回転可能な部材120のラチェットアーム650は、ラチェット歯652と係合しかつトリガ18のアクチュエーションに応答して時計回りにロックアウトホイール112を回転させるように設計されている。トリガ18の解除と同時に、ラチェットアーム650はその後半径方向と反対に回転させられてラチェット歯の各々の上を動くことにより、各クリップ300が発射されたあと、爪106の半径方向の前進を邪魔することなく、ラチェットアーム650が反時計回りに動いてもとの位置にリセットされることを可能にする。
【0133】
図37〜図42において最もよく示されているように、および図38を参照して、発射されていない状態で、トリップレバー500は、スピンドル128によって搬送される。トリップレバー500は、トリップレバースプリング502によってバイアスされる。トリップレバー500はまた、フィードバー400において近位窓410と接触している。トリップブロック406は、トリップレバー500に対して遠位位置にある。
【0134】
ここで図39を参照して、クリップ300が遠位方向にバイアスされるようにフォロワスプリング408によってバイアスされるフォロワ306が示されている。
【0135】
ここで図40を参照して、スピンドル128上に休止しているカムリンク208およびウェッジプレート600を有するスピンドル128の別の断面図が示されている。スライダジョイント202は、ウェッジプレート600の下に配置され、ラッチ部材206はスライダジョイント202に配置されている。スピンドル128は、最初の距離、遠位的にカムリンク208を駆動することにより、カムリンク208上のカムリンクボス230はウェッジプレート600においてカムスロット612と係合する。
【0136】
図41および図41Aを参照して、フィラコンポーネント700を有する外側チューブ14の別の断面図が示されている。ウェッジプレート600は、フィラコンポーネント700の下に配置され、回転可能な部材702はその間に延びている。
【0137】
ウェッジプレート700は、開口部706に配置されているスプリングバー部材704を有している。スプリングバー部材704は、回転可能な部材702をバイアスし、かつその自由端で偏向し得る。回転可能な部材702は、点線で示されているフィラコンポーネント700の下にあるスピンドル128のカム特徴210に対して遠位に配置されている。いったん遠位的に駆動されると、スピンドル128が前進する。スピンドル128は、カム特徴210を前進させる。カム特徴210は、遠位的に駆動され、回転可能な部材702を時計回りに偏向させる。
【0138】
図41Bを参照して、図41の線41B−41Bに沿って様々なコンポーネントを示す、スピンドル128の断面図が示されている。クリップ300は、クリップチャネル302で休止し、その上側にフィーダバー400を有している。ウェッジプレート600は、示されているように、フィラコンポーネント700の下、かつスピンドル128より上にに配置されている。クリップチャネルカバー310は、クリップチャネル302より上に配置されている。
【0139】
図42Aに示されるように、プッシャ414は、クリップ300の各々をクリップチャネル24の中に前進させる。図42において、スピンドル128は、発射されていない状態で示されている。スピンドル128は、スライダジョイント202に接続するように配置されている。クリップアプライヤ10が発射されているとき、スピンドル128は遠位的に動く。所定の距離において、ラッチ部材206は、機械的に強制されて、カムで下がり、図73で示される基準矢印の方向に、スピンドル128のチャネル250と係合する(図11で最もよく示される)。これによって、スライダジョイント202は、ドライババー200と共に(駆動されるときは)遠位的に動くことが可能となる。このように、ドライババー200は、関係する表面と係合し得て、ジョー16の間でチャネル24において配置されたクリップ300の周りでジョー16を閉ざす。
【0140】
ここで、図43を参照して、もとの最も近位位置におけるウェッジプレート600およびジョー16の斜視図が示されている。ウェッジプレート600は、タング606の周りの窓604においてウェッジプレートスプリング602を有している。ウェッジプレート600は、「C」状の窓610をさらに有することにより、回転可能な部材702と係合する。カムリンク208は、カムスロット612に対して最も近位位置にある。
【0141】
図44〜図46を参照して、ウェッジプレート600は、カム特徴23aおよび23bと係合可能な丸みのある遠位端616を有することにより、後に示されるように装填のためにわずかに第1のジョー16aおよび第2のジョー16bを分離する。
【0142】
図47を参照して、カムリンク208は、この図において、カムリンク208より下に配置されたフィラコンポーネント700と共に、最初の近位位置でカムスロット612の中に最初に配置される。ウェッジプレート600の近位部分上の図示されるような「C」状の窓610を参照して、回転可能な部材702は、「C」状の窓610を介して延びている第2の端710を有している。回転可能な部材702の第1の端708は、ウェッジプレート600の下にあるフィラコンポーネント700上のスプリングバー部材704と接触している。
【0143】
図48を参照して、クリップアプライヤ10のアクチュエーションを開始するために、トリガ18は、矢印Cによって示されるとおり最初のスイングを介して動かされることにより、ウイッシュボーンリンク26は矢印Dによって示されるように駆動部材を駆動する。図49を参照して、駆動部材36上のラック40は、参照矢印Eによって示されるように爪46の下でスライドし始め、爪46は回転して参照矢印Fによって爪リターンスプリング48を偏向する。
【0144】
ここで、図49Aを参照して、信号デバイス54が示されている。信号デバイス54は、ハンドルアセンブリ12と一体である内部リブ2を有する。クリックレバー78は、クリックレバースプリング80と接触し、スプリング80からはね返されると同時に、クリックレバー78は、クリックレバー78の球根状の部分190を内部リブ2と接触させる。
【0145】
内部リブ2と接触すると同時に、球根状の部分190および内部リブ2は反響し、それによってクリップ発射の可聴の指示を外科医に提供する。同時に、駆動部材36およびラック40が遠位的に前進するとき、爪46は、図50に示されるように回転する。トリガ18がこの時点で解除されるとき、ラック40は任意の近位運動に対して爪46を抑制し、従ってトリガの解除、およびトリガ18の任意の部分的なまたは不慮の部分的なアクチュエーションを防ぐ。
【0146】
さらに、図50Aに示されるように、ロックアウトデバイス56のロックアウトホイール112は回転もして、爪106をロックアウトホイール112の内周114上の歯116と接触させる。図示のように、いったんクリップ300が発射されると、爪106は第1の歯スペース3から次の歯スペース5へと前進する。別のクリップ300が発射される場合、爪106はスペース5からスペース7へと回転し、いったん最後のクリップ300が発射されると、爪106がエスケープノッチ110に到着するまで反時計回りで前進し続ける。外科用クリップアプライヤ10が、ロックアウトホイール112の歯の数を常に超過するクリップ300の数で装填されることにより、外科用クリップアプライヤ10が決してクリップなしで発射しないこと、または換言すればクリップ300なしでは発射し得ないことを確実なものにする。
【0147】
図51を参照して、最初のストロークの間、スピンドル128は、所定の距離を動く。スピンドル128が、遠位的に所定の距離を動くとき、トリップレバースプリング502によってバイアスされたトリップレバー500は遠位的に動き、フィードバー400は、トリップレバー500によって遠位的に駆動され、フィードバー窓410と係合する。ここで図52を参照して、最も遠位のクリップ300は、プッシャ414によってジョー16のチャネル24の中に動かされるとき、フォロワ306は、遠位方向に動き、かつフォロワスプリング308によって前方に促される。フォロワ306は、ジョー16のチャネル24の中に個々に装填されるように、遠位的な態様でクリップ300の各々を動かす。
【0148】
ここで、図53〜図55を参照して、フィラコンポーネント700、ウェッジプレート600、およびカムクランク208との最初のストローク中の、クリップアプライヤ10の様々なコンポーネントの断面図が示されている。スピンドル128が遠位的に動くとき、カムクランク208上のボス230は、図55に示されるようにウェッジプレート600のカムスロット612上のカム表面614と接触する。カムリンク208は、スピンドル128と共に遠位的に動き、カム表面614も、フィラコンポーネント700に対して遠位的に促される。
【0149】
ここで、図56を参照して、プッシャ414は個々のクリップ300を促し、ジョー16のチャネル24の中に前進させ、一方相対する端では、スピンドル128は好適な幾何学的形状を有することにより、ジョー16をアクチュエートしかつ閉ざすためのドライババー200に接触しない。
【0150】
図57を参照して、カムリンク208が、遠位的に前進させられるとき、カムリンク208はカムスロット612のカム表面614と係合し、フィラコンポーネント700に対して遠位的にウェッジプレート600を動かす。同時に、「C」状の窓610も、遠位的に前進し、横表面625は回転可能な部材702の第2の端710と接触する。ウェッジプレートの横面625は、回転可能な部材702を促し、図示のように反時計回りに回転させる。回転可能な部材702の第1の端708は回転と同時に、フィラコンポーネント700上のスプリングバー部材704と接触し、フィラコンポーネント700のスプリングバー部材704を偏向させる。
【0151】
図58を参照して、フィードバー400は、傾斜面でプッシャ414を促し続け、傾斜面は単一のクリップ300に接触する。プッシャ414は、クリップ300をクリップチャネル24の中に導入し続ける。同時に、ウェッジプレート600は前進し続け、カムリンク208によって遠位的に駆動され、参照矢印によって示されるようにカムスロット612のカム表面614を促す。
【0152】
図59は、スプリングバー部材704が、回転可能な部材702によって偏向された後、基準矢印Gの方向にはね返る。はね返りが回転可能な部材702を時計回りに動かすことにより、第2の端710は、参照矢印Hで示されるように「C」状の窓610の横側626と接触する。従って、回転可能な部材702は、最も遠位な位置にウェッジプレート600を都合よく保持し、かつ装填のために完全にウェッジプレート600の位置を制御する。
【0153】
図59のこの最も遠位位置でカムリンク208は、カム特徴またはフィラコンポーネント700上のフィラコンポーネントカムスロット720の遊離カム表面726と接触する。カムリンク208はここで、カム表面614との係合から遊離され、ウェッジプレート600はその最も遠位位置にあり、カムリンク208はもはやウェッジプレート600を遠位的に駆動しない。
【0154】
図60および図61を参照して、ウェッジプレート600の丸みのある遠位端616がここで、図示されるように、第1および第2のジョーコンポーネント16a、16bのカム表面23a、23bの間に動き入れられる。ウェッジプレート600の丸みのある遠位エッジ616はこのように、チャネル24のサイズを穏やかに増加させるために、図示のように互いから相対する方向に、第1および第2のジョーコンポーネント16a、16bを動かす。これは、追加的に、ジョー部材16a、16bの各々が、互いに関して曲がることを抑制し、参照矢印によって示されるようにクリップ300がジョー16の間に挿入されているとき、クリップ300における任意の捩れを防ぐ。
【0155】
図62に最もよく示されるように、カムリンク208は、カムスロット612内で遠位的に前進し続け、一方ウェッジプレート600は、第2の端710で回転可能な部材702によって保持される。回転可能な部材702は、フィラコンポーネント700の開口部706のスプリングバー部材704と横壁との間で第2の端710においてスプリングバー部材704によって保持される。図63を参照して、スピンドル128は、ストロークを介して遠位的に動き続け、トリップレバー500はスピンドル128で遠位的に促される。
【0156】
フィードバー400の近位端において、フィードバー400のカム表面およびトリップレバー500は、互いに対して係合が遊離される。トリップレバー500は、トリップブロック406の歯をつけられた部材420によってフィードバー400の窓410に対して係合が遊離される。これによって、フィードバー400が、フィードバー400のバイアスのために、近位の最初の位置に戻ることが可能となる。このようにして、クリップ300がチャネル24の中へ装填されることが完了し、フィードバー400はスプリング張力によって最初の位置へ収縮される。
【0157】
図64を参照して、フィードバー400の遠位部分が、クリップ300の装填が完了して示され、その後、クリップアプライヤ10の最初の近位位置に収縮する。
【0158】
図65および図65Aに最もよく示されるように、ウェッジプレート600(図65)の底面図、およびフィラコンポーネント700(図65A)の上面図が示され、スピンドル128は点線で示されている。スピンドル128は、スピンドル128が遠位的に前進するとき、回転可能な部材702の第2の端710に接触するカム特徴210またはエッジを有する。相対する図で示されるように、カム特徴210は、遠位的に前進させられ、回転可能な部材702を反時計回りに偏向する。回転によって、回転可能な部材702の第1の端708は、フィラコンポーネント700のスプリングバー部材704を同様に偏向することになる。特に、回転可能な部材702は、ウェッジプレート600をもはや保持していず、ウェッジプレート600は、スプリングの捩れによって収縮することが可能となる。
【0159】
ここで図66を参照して、スピンドル128によって遠位的に動かされるとき、トリップレバー500は、フィードバー窓410との係合から遊離される。これによって、フィードバー400は、矢印Jによって示されるように近位方向に収縮することが可能となる。スピンドル128はストローク中に遠位的に前進し続ける。
【0160】
図67を参照して、ジョー16の間でチャネル24の中に挿入されたクリップ300が示されている。図67に最もよく示されるように、フィードバー400はここで、次のクリップ300に対して最も遠位位置に到着し、かつ装填が完了した後、収縮する。トリップレバー500は、フィードバー400との係合から遊離され、これによって、プッシャ414が近位的に収縮することが可能となる。図67に示されるように、フィードバー400は収縮することにより、プッシャ414のノーズは最初の位置と整列し、これにより、クリップの数のうち次のクリップ300をチャネル24の中に装填する。
【0161】
ここで図67Aを参照して、ハンドルアセンブリ12の断面図が示されている。トリガ18は、外科医によって発射され、通常参照矢印Aの方向に把持され、かつ引かれる。トリガ18は、アクチュエータプレート50の長手方向の窓60の端へ前進するウイッシュボーン26を動かす。遠位的に駆動されるアクチュエータプレート50は、突起70リンクを、LCDユニット96上で適切なLCDコンタクト100と接触して、LCDディスプレイ98のディスプレイを変化させ、かつ/または表示されたパラメータを変化させるLCDレバー52の方に動かす。ウイッシュボーンリンク26も、ドライバ部材36を遠位的に駆動し、スピンドル128を前進させる。
【0162】
信号デバイス54も、アクチュエータプレート50によって駆動され、クリックレバー78に回転を開始させることにより、ハンドルアセンブリ12のリブ2と接触する。
【0163】
ここで図68を参照して、ストロークが進行するとき、スピンドル128およびトリップレバー500は遠位的に動き続け、トリップレバー500は完全に下に下げられ、トリップブロック406の下になることによりフィードバー400はトリップレバー500から遊離し、フィードバーは、クリップチャネル302において次に最も遠位なクリップの近位的背後で収縮し得る。
【0164】
図69を参照して、ウェッジプレート600の上面図が示されている。前に論議されたように、スピンドル128は、カムリンク208をカムスロット612を介して遠位的に動かし続ける。ウェッジプレート600の「C」状の窓610、およびウェッジプレート600の上に示されているフィラコンポーネント700を参照して、回転可能な部材702が示されている。回転可能な部材702は、第1の近位端708および相対する第2の遠位端710を有している。回転可能な部材702の第2の遠位端710は、「C」状の窓610のより遠位領域の中にぱちっと跳ね返る。スプリングバー部材704は、もとの位置に偏向して戻る。
【0165】
図70を参照して、ウェッジプレート600の丸みのある遠位端616は、装填して近位位置に動いた後、ジョー16から収縮される。図70に示されるように、クリップ300は、ジョーによる圧縮力の適用のため、ジョーのチャネル24で休止する。
【0166】
図71Aを参照して、ハンドル部分12におけるアクチュエータプレート50は、遠位的に動き続け、可聴クリックレバー78に反時計回りに回転するように作用する。可聴クリックレバー78は次に、クリックスプリング80によって偏向される。図71に戻って、ラッチ部材206は、スピンドル128の方向にカムで動かされることにより、ドライババー200は、係合され得、遠位的に動いて要求される圧縮力を適用する。ドライババー200は、スピンドル128によって係合される。ドライババー200は、遠位的に駆動され、ジョーレグ16aおよび16bを互いの方向に強制することにより、クリップ300を血管に圧する。
【0167】
図72を参照して、フルストローク中のハンドルアセンブリ12の断面図が示されている。トリガ18が解除されるとき、爪46は自らをリセットすることにより、器具は収縮してリセットし得る。駆動部材36上のラック40は、フルストローク位置で爪からクリアされる。
【0168】
特に、可聴クリックレバー78は、球根状の部分190をリブ2に鋭く接触させて可聴の大きなクリック音を出すことによってハンドル12の筐体のリブ2に接触する。可聴クリックレバー78は、駆動部材36によって遠位的に動かされるアクチュエータプレート50によって回転させられる。
【0169】
図73を参照して、フルストロークでの内視鏡部分の断面図が示されている。スピンドル128のフルストロークが、クリップ300を最初の位置から、ジョー16において完全に挿入された位置まで移動させるために要求される。最も遠位位置まで駆動されたスピンドル128は、ドライババー200を動かしてクリップをかしめる。
【0170】
図74〜図76は、ジョー16a、16bの各々上にある第1および第2の高められたカム表面214、216と係合するカム表面256を有するドライババー200を示す。ドライババー200は、高められた表面に乗り、チャネル24においてクリップ300を有するジョー16を閉ざす。図75の線76−76に沿った断面に示されるように、図76は、ジョー16のカム高められた表面212、214の上で閉じ、チャネル24におけるクリップ300に圧縮を適用する「T」状のチャネルを有するドライババー200を示している。
【0171】
図77を参照して、クリップアプライヤ10は、締め付けによってジョー16によるチャネル24におけるクリップ300の過剰ストロークまたは過度の圧縮を防ぐために提供された安全メカニズムを有する。そのような過度の圧縮は、1つ以上の損害、例えばクリップ30の過度な圧縮またはドライババー200もしくはジョー16への損害を引き起こし得る。トリガ18が、図78に示されるようにクリップ300の完全な形成のために要求される完全なストロークを過ぎて締め付けられ続ける場合、図77のインパクトスプリング196が、ノブ20およびブッシング156によって規定されたスペースの中で圧縮する。インパクトスプリング196は、血管上のクリップを閉ざすために要求される力以上の力を吸収することによって、スピンドル128の任意のさらなる遠位運動を妨げる。
【0172】
図79に示されるようにトリガ18がいったん解除されると、爪46は爪リターンスプリング48のバイアス(bias)に対して回転することにより、爪歯178はラック40に沿って乗り、参照矢印Kによって示されるようにハンドルアセンブリ14をリセットする。駆動部材36は、収縮してリセットする。駆動部材36上のラック40は近位的に動き、爪46の下へ戻る。
【0173】
図80を参照して、スピンドル128は、近位位置へ収縮し、ラッチ部材206は、スピンドル128と相対して上方に駆動される。図81〜図83を参照して、カム特徴210を有するスピンドル128は近位的に収縮し、回転可能な部材702の第1の近位端708を回転させ、フィラコンポーネント700のスプリングバー部材704と接触する回転可能な部材702と接触する。
【0174】
図83を参照して、スピンドル128が近位位置において収縮するとき、カムリンク208はウェッジプレート600におけるカムスロット612を介して再び動く。スピンドル128は、近位的に収縮し続け、図82および図83に示されるようにカムリンク208は、近位的に引かれ、休止し、もとの位置へカムで動かされる。
【0175】
ウェッジプレート600はすでに完全に収縮したので収縮せず、スピンドル128による近位運動によって、カムリンク208はそのもとの位置へ戻ることは理解されるべきである。この位置において、クリップアプライヤ10は、再び最初の位置にあり、再発射されて血管に別のクリップ300を取り付ける。
【0176】
ここで図84〜図86を参照して、第1の回転可能な部材102は、ロックアウトホイール112の歯116を介して、ラチェットし続ける。ロックアウトホイール112は進行し、クリップ300の各々が発射されたあと半径方向に前進する。図85に示されているように、第1の回転可能な部材102は、爪106がロックアウトホイール112におけるエスケープノッチ110に到着するまで回転する。図85の矢印Kによって示されるように、エスケープノッチ110は次に、爪106がロックアウトホイール112から横断することを可能にする。
【0177】
図86を参照して、爪106は次に、トリガハンドル18に示されている対応するノッチ(A)と嵌合する。爪106がノッチAと嵌合すると同時に、クリップアプライヤ10はロックされ、爪106は、トリガ18によるさらなる発射または駆動部材36の駆動を妨げる。その後、クリップアプライヤ10は、好適な容器の中に配置され得る。最も好ましくは、クリップアプライヤ10は、ロックアウトホイール112における歯の数を超過するクリップ300の数で装填される。このため、クリップアプライヤ10は、その中にクリップがない状態で発射され得ない。
【0178】
ここで、図87〜図89を参照して、本クリップアプライヤ10の多くのコンポーネントの代替的実施形態が示されている。図87を参照して、ウェッジプレート750、リンクカム752、フィラコンポーネント754およびスピンドル756の分解図が示されている。
【0179】
ウェッジプレート750は、前に示された実施形態と類似し、丸みのある遠位端758を有し、近位端でフィラコンポーネント754の方に適切に傾けられている。丸みのある遠位端758は、論議されたように好ましくは遠位的な態様に動き、クリップ装填のためにクリップアプライヤ10のジョー16の間に配置される。ウェッジプレート750は、リンクカムノッチ760をさらに有している。リンクカムノッチ760は、ウェッジプレート750の実質的に中央部分にある。リンクカムノッチ760は、概略直交形状であり、ウェッジプレート750の横側の中に形成されている。リンクカムノッチ760は、ウェッジプレート750の中央へ延びるのに好適な深さを有する。あるいは、リンクカムノッチ760は、別の形状を有し得るか、または円形もしくは曲線的であり得る。様々な構成が可能であり、本開示の範囲内である。リンクカムノッチ760は好ましくは、リンクカム752がウェッジプレート750と係合しかつ遠位的に動かすことを可能にする。遠位運動は、ジョー16の間に丸みのある遠位端758を導入する。スピンドル756の遠位運動は、ウェッジプレート750を、所定の境界線で遊離させる。
【0180】
図87のウェッジプレート750の上に示されたフィラコンポーネント754は、他のコンポーネントに対して動かず、静止を保つように意図されている。フィラコンポーネント754は、リンクカム開口部762を有している。リンクカム開口部762は、フィラコンポーネント754の中に配置されてリンクカム752へのアクセスを可能にする円形状の特徴である。リンクカム開口部762は、ウェッジプレート750のリンクカムノッチ760に対して相補的な位置にある。位置は、リンクカム752の一部がリンクカムノッチ760と係合することを可能にする。
【0181】
リンクカム752は好ましくは、2つの不連続の部分を有する。リンクカム752は、第1のベース764および第2のアーム766を有している。第1のベース764は休止し、フィラコンポーネント754のリンクカム開口部762の中に回転可能に取り付けられている。第2のアーム766は、第1のベース764に接続されている。第2のアーム766は、ウェッジプレート750のリンクカムノッチ760と係合可能である。第2のアーム766は、スピンドル756のカムスロット768に乗るポスト767も有している。リンクカム752は好ましくは、回転して、別の部材を特定の固定した距離動かし、次に運動の終わりで上記部材をその最初の位置に戻す部分を有する。
【0182】
ここで、スピンドル756を参照して、スピンドル756は、図87のフィラコンポーネント754およびウェッジプレート750の両方の下に配置されて示され、カムスロット768を有している。理解され得るように、ここで遠位出発位置770からカムスロット768に沿って近位終末位置へ向かうカムスロット768を参照して、スピンドル756がストロークを介して遠位的に前進するとき、リンクカム752の第2のアーム766のポスト767が、カムスロット768に乗り、カムスロット768の正確な経路に従うことは理解される。特定の境界線が到達され、次にスプリング(図示されず)またはリンクカム752の別のバイアスデバイスが、ポスト767を収縮するまで、ポスト767は、カムスロット768におけるウェッジプレート750を駆動する。
【0183】
ここで図88Aを参照して、組み立てられた状態でウェッジプレート750上で休止しているフィラコンポーネント754が示されている。図から理解され得るように、リンクカム開口部762は、第1のベース部分764がフィラコンポーネント754のリンクカム開口部762の中にある状態で示されている。当業者は、第1のベース部分764は、フィラコンポーネント754のリンクカム開口部762の中で自由に動き得、または自由に回転し得ることは理解すべきである。当業者は、リンクカム752の第1のベース部分764は、任意の所望の回転範囲度で、かつ正確にフィラコンポーネント754の下で第2のアーム部分(図示されず)を回転し得、クリップアプライヤ10は、任意の特定の回転量に特に制限されないことはさらに理解すべきである。
【0184】
ここで図88Bを参照して、図88Aのフィラコンポーネント754が図示の目的だけのために除去されて、スピンドル756上に休止しているウェッジプレート750の図画示されている。ここで図88Aのフィラコンポーネント754が除去された状態で見られるように、リンクカム752は第2のアーム766を有し、ポスト(図示されず)はウェッジプレート750のリンクカムノッチ760と係合している。この方式で、リンクカム752の第2のアーム766が回転するとき、ポスト767は、ウェッジプレート750に遠位的に促し、特にジョー16の間で遠位側に示された丸みのある遠位端758に作用することによって、クリップを装填する。
【0185】
ここで、図88Cを参照して、ウェッジプレート750の下にある、スピンドル756のカムスロット768が破線で示されている。カムスロット768の最も遠位な出発位置付け772において、カムスロット768は、リンクカム752の方向付けをじゃましない。しかしながら、第2のアーム766のポスト767が、破線で示されるカムスロット768のカム特徴774に接触するとき、第2のアーム766が反時計回りにカムで動かされ、このようにして、リンクカムノッチ760と係合し遠位的に押すことによってウェッジプレート750を駆動する。スピンドル756が、ストロークを介して、遠位的に駆動され続けるとき、リンクカム752の第2のアーム766のポスト767は、カム特徴774を横断して過ぎる。特に、この位置付けで、ウェッジプレート758の丸みのある遠位端は、装填のためにジョー16の間にある。
【0186】
ここで図89を参照して、スピンドル756のカムスロット768における図88Cの窓92に沿ったリンクカム754のクローズアップ図が示されている。リンクカム754が、遠位的に駆動されて、スピンドル756のカム特徴774を過ぎるとき、リンクカム754は、カムスロット768の最も近位位置770の中に駆動される。カムスロット768のこの最も近位位置770は、いったんジョー16が装填され、スピンドル756がストロークを介して発射のために前進し続けるとき、ウェッジプレート750の収縮を可能にする。
【0187】
ここで図90を参照して、本クリップアプライヤ10の別の代替的な実施形態が示されている。この実施形態におけるクリップアプライヤ10は、信号デバイス54を有している。信号デバイス54は、前に記述されたように、外科イベントが起きたこと、起きつつあること、または未来に起きることの指示を外科医に提供する。
【0188】
外科イベントは、クリップアプライヤ10と関連し、外科手続きに関係し、またはその両方であり得る。一実施形態において、外科イベントは、クリップアプライヤ10に残る利用可能な外科用クリップの数と関係し得る。別の実施形態においては、外科イベントは、いつクリップ300が発射されることが推奨されるかに関する時間の指示に関係し得る。別の実施形態においては、外科イベントは、クリップアプライヤのクリップなしでの任意の発射に関係し得、またはこれを防ぎ得、かつ信号デバイス54は、クリップアプライヤ10における外科用クリップ300の数が少なすぎ、新しいクリップアプライヤ10または別のデバイスが調達されるべきであることを外科医に警告し得る。別の実施形態においては、外科イベントは、外科手術の他の重要なまたは便利なパラメータ、例えば外科手術の合計時間であり得る。様々な構成が可能であり、本開示の範囲内であり、かつ信号デバイス54は好ましくは、容易には見られ得ないパラメータのフィードバックで、特に他の内視鏡器具の使用と連携して、外科医を補佐する。
【0189】
ここで図90を参照して、信号デバイス54の第1のコンポーネント776が示されている。第1のコンポーネント776は、円筒形状の部材である。第1のコンポーネント776は好ましくは、近位オープニング778を有している。近位オープニング778は、チャネル780を有している。チャネル780は、第1のコンポーネント776の横側の中に延びている第1および第2の横サブチャネル780a、および780bも有している。近位オープニング778は、チャネル780の内部を取り囲むように配置された内部横面も有している。
【0190】
第1のコンポーネント776は、カム特徴784を有している遠位側782も有している。この実施形態において、遠位側782は、第1および第2の尖端786、788であるカム特徴784を有している。ここで図91を参照して、第1のコンポーネント776の上面図が示されている。図面から理解されるように、第1および第2の尖端786および788(第1の端は、図90に示される図面の側面図によって遮られる)は、遠位側782で第1のコンポーネント776から外側へかつ遠ざかって突出する。第1のコンポーネント776は棚787も有している。ここで図92を参照して、第1のコンポーネント776の上面図が示されている。第1のコンポーネント776(この図で)は、遠位側782から外側へ延びている第1および第2の尖端786、788を有している。
【0191】
ここで、図93を参照して、近位オープニング778およびチャネル780の図が示されている。理解され得るように、チャネル780は、好適な大きさとされ、その中に別の部材がアクセスすることを可能とする。チャネル780は、第1の横サブチャネル780aおよび第2の横サブチャネル780bを有する横側も有している。
【0192】
ここで図94を参照して、信号デバイス54の第2のコンポーネント790が示されている。第2のコンポーネント790は、レバータイプ構造であり、図示目的のために参照Aとして示されている、1つの回転可能な軸の周りに回転することができる。第2のコンポーネント790は、メインポスト792を有している。メインポスト792は、カム表面796を有するベース部分794上にあり、第1のコンポーネント776において挿入のためにある。好ましくは、カム表面796は、好適な大きさを有することにより、第1および第2の尖端786、788のうちの1つを受ける。特に、第2のコンポーネント790は回転する。
【0193】
第2のコンポーネント790は、別の第2のポスト902および第3のポスト904も有している。第2のポスト902は、連鎖906によってメインポスト792に接続され、第3のポスト904は、別の第2の連鎖908によってメインポスト792に接続されている。好ましくは、メインポスト792は、第1のコンポーネント776のチャネル780の中に延びており、かつ第1の尖端786はカム表面796の第1のサブリセス910と係合する。回転と同時に、第1のコンポーネント776の第1の尖端786は、カム表面796に乗り、第1のコンポーネント776を第2のコンポーネント790から遠ざかるように動かす。第1のコンポーネント776が回転され、第1のコンポーネント776を第2のコンポーネント790から、長手方向の軸Aと平行な方向に遠ざかるように動かすとき、第1の尖端786は、第1のサブリセス910から隣接する第2のサブリセス912へ有利にも横断する。
【0194】
ここで、図95として示されているクリップアプライヤ10のハンドル部分12の内部図を参照して、内側にかつハンドル部分12の中に延びているリブ部分914が示されている。リブ部分914は、円筒形状の特徴である。リブ部分914は、好ましくはハンドル部分12の中に成形される。リブ部分914は、横ストリップ916を有する。横ストリップ916は、円筒形状リブ部分914に一体的に接続されている直交形状の部材である。
【0195】
図96は、図95に示されるハンドル部分12の部分と嵌合するクリップアプライヤ10のハンドル部分12の相対する横側の内部図を示す。図95は、第1のコンポーネント776の棚787上に休止するスプリング901を有するクリップアプライヤ10の信号デバイス54の部分的組立図を示す。図95から理解され得るように、リブ部分916(図95に図示)の横ストリップ916は、第1の円筒形の部分776を介して、係合しかつ配置されている。横ストリップ916は、第1のコンポーネント776を回転することから妨げる。第1のコンポーネント776がリブ部分914(図95に図示)の固定された横ストリップ916に対して回転するように試みるとき、横ストリップ916は接触し、第1のコンポーネントを、第1の横サブチャネル780aの横側との接触により動くことから妨げる。
【0196】
なお図95を参照すると、ドライババー918は、アクチュエータプレート920に接続されている。この実施形態におけるアクチュエータプレート920は、その近位側にノッチ922を有する。ノッチ922は、第2のコンポーネント790の第2のポスト902と係合する。ドライババー918が遠位的に駆動されるにつれ、ドライババー918はまた、同様な方法でアクチュエータプレート920に遠位的に作用する。ノッチ922を有するアクチュエータプレート920もまた、第2のコンポーネント790(図94に示される)の第2のポスト902を回転させる。第2のコンポーネント790も同様に、反時計回りに回転することによってカムノッチ796(図94に示される)を回転させる。カムノッチ796(図94に示される)もまた、回転し、かつ第1のコンポーネント776の第1の尖鋭端786(図92に示される)を回転させようとする。しかし、横ストリップ916(図95に示される)は、そのような回転を防止する。これは、スプリング901が、第1のコンポーネント776を内側に、第2のコンポーネント790の方向にバイアスさせながら、第1のコンポーネント776が第2のコンポーネント790から離れるように横に移動する原因となる。カムノッチ796は、次いで第1のコンポーネント776を、第2のコンポーネント790から分離させ、カムノッチ796に乗り上げる。第1のコンポーネント776が、カムノッチ796内を横移動するにつれて、第1のコンポーネント776は、次いで戻り、第2のコンポーネント790と急に接触するが、これはスプリング901の偏りによるものである。第1のコンポーネント776と第2のコンポーネント790との間のこの急な接触は、クリップが発射されるなどの外科手術のイベントの、聞き取れるクリック音を起こす。こう示すことによって、外科医にクリップが発射されたというフィードバックを提供する。様々な構成が可能であり、それらは、本開示の範囲内に存在する。図97は、容器に適用されたクリップ300を例示する。
【0197】
本開示の別の実施形態において、クリップアプライヤ1010は、ロックアウト(lockout)デバイスを含む。ロックアウトデバイスは、器具1010のハンドル部12に位置し、器具1010の1つ以上のサブアセンブリの動作をロックする。ロックアウトデバイスは、トリガ14に加えられた力に関わらず、器具の作動を防止する。この実施形態におけるロックアウトデバイスは、スピンドル128が長手方向に移動することを防止する。従って、ドライババー200(または、そのサブコンポーネント)は、クリップアプライヤ10に何もクリップ300が残っていないときには、ジョー16aおよび16bの間のクリップをかしめることはできない。
【0198】
さらに具体的には、所定数のクリップ300が、クリップアプライヤ1010から発射された後に、クリップアプライヤ1010は、自動的にロックすることによって、クリップのさらなる配置を防止する。このようにして、該ロックアウトは、外科医に感知できるフィードバックを提供し、クリップアプライヤ1010にはクリップ300が残っていないので、組織に適用されるべきクリップ300は残っていないということを知らせる。図98を参照すると、ロックアウトデバイスのいくつかの構成が提示および記述される。図98は、クリップアプライヤ1010が、クリップ搬送チャネル1102(図99)の所定位置に配置されているスプリング1100を有するところを例示する。クリップ搬送チャネル1102と関連付けて示されるが、スプリング1100は、マガジン内などのクリップアプライヤ1010の他のエリアに配置され得、または、クリップアプライヤ1010がクリップ搬送チャネル1102を含まない実施形態では、スプリング1100は、他のエリアに配置され得るか、位置し得る。スプリング1100は、第1の片持ちの自由端1108および対向端1104を有する。端1104は、ロックアウトバー1106を受けるように適合される(図101および図102を参照されたい)。クリップ搬送チャネル1102は、上面図において、図99および図100で再現される。理解され得るように、チャネル1102の遠位側1112(図100)は、アパーチャ1110を有する。
【0199】
図101および図102を参照すると、クリップアプライヤ1010もまた、ロックアウトバー1106を有する。ロックアウトバー1106は、上面図として、図101で再現される。ロックアウトバー1106は、第1の端1114および第2の対向フック端1116を含む。ロックアウトバー1106は、クリップ搬送チャネル1102のシーリングとフロアとの間に詰め込まれるように十分な寸法が取られている。別の実施形態において、該バーは、クリップマガジンのシーリングとフロアとの間に詰め込まれ得る。第2のフック端1116における溝は、クリップアプライヤ1010のクリップフォロア1118(図112)と係合するように適合される。しかし、ロックアウトバー1106は、他の方法、例えばスナップフィット(snap−fit)配置、フリクションフィット(friction−fit)配置、スクリューフィット(screw−fit)配置、ピン配置、または第1の端1114が動き得る他の配置によって、クリップフォロア1118と取り外し可能なように、または永久的に接続され得る。ロックアウトバー1106は、チャネルカバーの底とクリップ搬送チャネル1102のフロア1102’との間に保留される。ロックアウトバー1106は、クリップフォロア1118内に形成された遠位スロット1117において位置する(図112に示される)。スロット1117は、通常は直交するように示されるが、当該分野において公知の任意の同様または異なる形状を有し得ることによって、コンポーネントがクリップフォロア1118において位置することを可能にする。ロックアウトバー1106は、それ自体ではクリップアプライヤ1010をロックアウトしないが、その代わりに、クリップ搬送チャネル1102にほとんどまたは全くクリップ300がないときには、クリップ搬送チャネル1102を介して上方向にのみ移動する。
【0200】
図103は、ロックアウトバー1106を有するロックアウトスプリング1100の部分的に組み立てられた図を例示する。図103および図106を参照すると、クリップフォロア1118は、クリップ搬送チャネル1102内のクリップ300のスタックを遠位的にバイアスさせることによって、クリップ300が、図97に示されるように組織に適用されるために、ジョー1016aとジョー1016bとの間に装填され利用可能となり得る。クリップフォロア1118は、遠位スロット1117を有する(図104)。ロックアウトバー1106は、スロット1117に受けられ、クリップアプライヤ器具1010が発射される度にクリップフォロア1118で遠位的に移動するように適合し、クリップフォロア1118は、遠位的に前進する。
【0201】
図105は、クリップ1010が、フィードバー1120を有することを示す。フィードバー1120は、クリップアプライヤ1010のジョー1016aとジョー1016b(図108)の間に単一のクリップ300を装填するために、発射トリガの各ストロークの間に、遠位的に、次いで隣接するように往復運動する。フィードバー1120は、遠位窓1122を有する。フィードバー1120は、薄い金属材料から作られており、上記の実施形態に関して既に記述されたように、トリップレバー(不図示)とトリップレバースプリング(不図示)によって遠位的に移動される。フィードバー1120は、クリップフォロア1118(図107に示される)およびクリップ搬送チャネル1102(図109に示される)より上に有利に配置される。フィードバー1120の近位端は、1対のフィン1119(図105)を有する。フィン1119は、クリップアプライヤ1010のスピンドル1132の近位窓1134と係合する(図114)。別の実施形態において、フィードバー1120の近位端は、単一のフィンまたはスピンドル1132の窓1134(または特定のスロット)と係合する部材を有し得る。
【0202】
ここで図106を参照すると、クリップ300が、器具1010から発射される度に、クリップフォロア1118は、クリップ搬送チャネル1102に関して遠位的に前進する。図107は、クリップアプライヤ10のコンポーネントの側面図を示し、クリップフォロア1118は、その最も遠位的な位置にあり、クリップアプライヤ1010のカバーは、例示目的のために除去されている。フィードバー1120は、ジョー(不図示)の間にクリップを前進させる遠位ノーズ1128を含む。フィードバー1120はまた、遠位窓1122を有する。クリップフォロア1118は、フィードバー1120の下に位置し、スロット1117を有する。ロックアウトバー1106は、クリップフォロア1118のスロット1117内に位置する。図107に示されるように、最も遠位な位置において、ロックアウトバー1106は、上向きに偏向し、フィードバー1120の窓1122と係合する。
【0203】
図108は、クリップアプライヤ1010のコンポーネントの上面斜視図を示す。クリップアプライヤ1010は、第1のジョー1016a、第2のジョー1016b、カバー1020に接続されたストップ1018およびフィードバー1120を有する。フィードバー1120は、遠位窓1122を有する。フォロア1118が最も遠位な位置にある、すなわちクリップが何も残っていないときに、ロックアウトバー1106は、遠位窓1122に延びる。別の実施形態において、フォロア1118が部分的に最も遠位な位置にある、すなわち、1つ、2つ、または3つほどのクリップほどしか残っていないときに、ロックアウトバー1106は、遠位窓1122に延びる。窓1122の様々な配置および位置が可能であり、それは本開示の範囲内であり、窓1122は、クリップアプライヤ1010内に任意の残数のクリップを有するクリップアプライヤ1010をロックアウトするように、様々な位置に配置され得ることが、認識されるべきである。
【0204】
図109は、図108のカバー1020が除去され、フィードバー1120のノーズ1128を示している、クリップアプライヤ1010のコンポーネントの上面斜視図を示す。示されるように、クリップフォロア1118は、クリップ搬送チャネル1102内にあり、クリップを遠位的に前進させ、示されるように、最終的に遠位位置に到達するまで継続する。図109から分り得るように、クリップ搬送チャネル1102内にクリップが何もない場合またはクリップアプライヤ1010によって発射されるように利用可能なクリップが何もないときには、クリップフォロア1118は、最も遠位な位置にある(例示目的の例として)。この最も遠位な位置に遠位窓1122を有するフィードバー1120は、ロックアウトバー1106と整列する。この最も遠位な位置におけるロックアウトバー1106は、上向きに偏向し、遠位窓1122を介して延びる。
【0205】
図110は、クリップアプライヤ1010のコンポーネントの斜視図を示し、例示目的のために、カバー1020およびフィードバー1120の両方は除去されており、ロックアウトバー1106とクリップフォロア1118との間の関係を示している。図110に示されるように、クリップ搬送チャネル1102は、クリップ搬送チャネル1102の横側にある数のフィンガ1103”を有することによって、クリップ搬送チャネル1102に配列されたクリップ(不図示)を維持する。クリップフォロア1118は、クリップ搬送チャネル1102において配置される。ロックアウトバー1106は、スロット1117において配置されるように示される。ロックアウトバー1106およびスロット1117は、異なる形状および幾何学的形状を有し得、本開示は、あらゆる特定の形状または幾何学的形状に限定されないということが認識されるべきである。フォロア1118およびロックアウトバー1106は、互いが一体化した部材として形成され得ることが、さらに認識されるべきである。様々な構成が、可能であり、本開示の範囲内である。
【0206】
図111を参照すると、クリップフォロア1118の底面図が示される。この図において、クリップフォロア1118は、通常は直交する形状であり、クリップフォロア1118の長手軸Aに沿って配列されるスロット1117を有するように示される。図111から分かり得るように、ロックアウトバー(不図示)の下は、ロックアウトスプリング1100であり、該スプリング1100は、バー1106をバイアスさせる。ロックアウトスプリング1100は、端1108において球根状の部材1108’を有する。スプリング1100の球根状の部材1108’は、クリップ搬送チャネル1102(図100に示される)内のアパーチャ1110に引っ掛からずに通過するのに十分な大きさである。
【0207】
スプリング1100の部材1108’が、クリップ搬送チャネルのフロア1102’の所定の位置、または部材1108’が図100のアパーチャ1110を通過して位置する場所に到達すると、ロックアウトバー1106のフック部分1116は、アパーチャ1110に適合および係合する。
【0208】
図112を参照すると、クリップフォロア1118の断面図を示し、該クリップフォロアは、クリップフォロア1118のスロット1117に配置されるロックアウトバー1106を有する。該図は、図111の線16−16に沿って描かれたものである。クリップフォロア1118のスロット1117は、ロックアウトバー1106のフック部分1116上の溝に配置されたピン1117aを有する。ピン1117aは、ロックアウトバー1106が、遠位動作の間にクリップフォロア1118から分離されることを防止する。
【0209】
ロックアウトバー1106の下に配置されるものは、ロックアウトスプリング1100であり、該スプリングは、図111に示されるクリップ搬送チャネル1102とは反対の方向にロックアウトバー1106を傾ける。最後のクリップが適用されるのに先立って、ロックアウトバー1106は、チャネルカバーの底面とクリップ搬送チャネル1102のフロア1102’との間に保留される。
【0210】
図107は、クリップフォロア1118の最も遠位な位置において、ロックアウトスプリング1100が、ロックアウトバー1106の自由端1114を、クリップ搬送チャネル1102より上に延びている位置に移動および回転させることを示す。従って、ロックアウトバー1106の自由端1114は、上向きに回転し、クリップフォロア1118の遠位端において、クリップ搬送チャネル1102のシーリング1103’を介して離脱することによって、図107に示されるように、フィードバー1120の最も遠位の窓1122と係合する。ロックアウトバー1106のフック部分1116は、回転するように下がり、クリップ搬送チャネル1102のフロアにおけるアパーチャ1110と係合する。
【0211】
フィードバー1120の遠位窓1122は、フィードバー1120(図113)のノーズ1128より上に、直ちに隣接するように示される。図107のロックアウトバー1106の自由端1114は、クリップ搬送チャネル1102の上を通過するように移動し、図107に示されるように、フィードバー1120の遠位窓1122と係合する。
【0212】
スピンドル1132は、図114および図115において示される。近位側で、スピンドル1132の遠位的または近位的な動きに影響することなく、クリップアプライヤ1010の通常の動作の間に、フィードバー1120(図105に示される)のフィン1119が、スピンドル1132の窓1134において単に位置するように、窓1134は、適切な寸法に計られ、配置される。窓1134は、図116において、拡大図で示される。
【0213】
図116に示されるように、窓1134は、通常は直交する形状であり、窓1134の外側の長手面は、クリップアプライヤ1010の通常の動作の間は、他のコンポーネントとは干渉または接触しない。フィードバー1120(図105に示される)は、図116のスピンドル1132に関する薄い部材である。一実施形態において、フィードバー1120は、薄い金属の部材である。別の実施形態において、フィードバー1120は、薄い熱可塑性の部材である。フィードバー1120は、スピンドル1132に関する遠位的および近位的な往復運動に適切である。フィン1119が、スピンドル1132の窓1134の遠位エッジを引っ掛けるときに、フィードバー1120は、スピンドル1132の収縮を防止するが、前進は防止しない。
【0214】
しかし、スピンドル1132は、完全に収縮し得ないことを考慮に入れると、ハンドル部分(図117)の爪1146は、定位置またはクリップアプライヤ1010のハンドル部分12におけるラック1140と関連する最初の位置には戻り得ない。その代わりに、図118に示されるように、爪1146は、ラック1140と関連する中間位置に留まる。トリガ(不図示)が絞られる(squeeze)ときには、爪1146は、ラック1140から離れるようには十分に回転し得ず、または時計回りに回転して爪1146を定位置(または、図117に示されるように、器具の次の発射のための静止位置)にリセットするようには移動し得ない。従って、爪1146およびラック1136は、絞られる状態からトリガ14をロックアウトし、スピンドル1132は、ドライババーと係合するようには遠位的に移動し得ず(図26および図27)、その結果として、クリップアプライヤ1010は、ジョー1016aおよび1016bを閉じることはできない。外科医は、トリガ14から強く感知できるフィードバック、およびトリガ14は、もはやハンドル12の方向に与圧され得ない抵抗を感じ、これによってクリップアプライヤ1010は、新たな器具を配置されること/新たな器具と置換されることを必要とする信号を送る。
【0215】
ここで図119に移ると、第2のロックアウトメカニズム1150に対するシャーピン1148の斜視図が示される。シャーピン1148は、第1のネック部分1154および第2のネック部分1156を定義する3部分の本体1152を有する、通常は円筒形の部材である。第1のネック部分1154および第2のネック部分1156はそれぞれ、本体1152よりも狭い幅を有し、リンケージ1160と係合するように構成される。さらに具体的には、トリガ1156がリンケージ1160と接続されており、該リンケージは、次いでピン1148の第1のネック部分1154および第2のネック部分1156と係合する。
【0216】
ここで図120を参照すると、ラック1140および爪1146を有し、第2のロックアウトメカニズム1150を用いて上述されたようにスピンドル1132をロックアウトしているクリップアプライヤ1010の側面断面図が示される。示されるように、トリガ1156は、スピンドル1132を遠位的に前進させることを防止するが、これは、ラック1140および爪1146が、上述されたように、スピンドル1132を近位方向に収縮させないからである。しかし、この実施形態において、器具1010は、第2のロックアウト1150を有することによって、外科医がトリガ1156およびハンドル1158に力を加えすぎることによって、ラック1140と爪1146との間の係合を乗り越えるか、または押しのけ、スピンドル1132を遠位的に移動させることを防止する。
【0217】
ここで図121に移ると、力F1がトリガ1156に加わる場合には、トリガ1156は、ハンドル1158の方向に移動し、リンク1160を前進させる。リンク1160は、シャーピン1148を遠位的に前進させることによって、スピンドルリンク1132aによってスピンドル1132を遠位的に前進させる。爪1146とラック1140との間の係合は、上述されたように、スピンドル1132が遠位的に移動することを防止する。しかし、ここで図122に移ると、力F2(力F1よりも大きい)がトリガ1156に加えられることによって、潜在的にラック1140と爪1146との間の係合を押しのけ得るように、さらにトリガ1156に与圧する場合には、力F2は、シャーピン1148を破壊する。従って、トリガ1156とスピンドル1132との間の接続は、破壊され、リンク1160は、スピンドルリンク1132aを遠位的に前進させ得ない。故に、第2のロックアウトが達成される。
【0218】
理解されるべきは、先の記述は、本開示の単なる例示的なものである。様々な代案および修正が、本開示から逸脱することなく当業者によって考案され得る。従って、本開示は、そのような全ての代案、修正および変化を包含するように意図される。添付の図面を参照しながら記述された実施形態は、本開示の特定の実施例を論証するためだけに提示されている。上述されたおよび/または添付の特許請求の範囲に記載された、実質なく異なる他の要素、ステップ、方法および技術もまた、本開示の範囲内にあることが意図される。
【符号の説明】
【0219】
10 クリップアプライヤ
12 ハンドルアセンブリ
14 管状部材
16 ジョー
18 トリガ
20 ノブ
56 ロックアウトメカニズム
74 ピン
100 LCDカウンタコンタクトプレート
128 スピンドル
200 ドライババー
【技術分野】
【0001】
(関連特許出願の引用)
当該の特許出願は、2005年10月7日出願の米国特許出願第11/245,523号の一部継続出願であり、2004年10月8日出願の米国仮特許出願第60/617,104号および2004年10月8日出願の米国仮特許出願第60/617,016号に対する優先権を主張し、これらは全て、そのまま本明細書中に参照として援用される。
【0002】
(技術分野)
本開示は、外科用クリップアプライヤに関連する。より具体的には、本開示は、該外科用クリップアプライヤのジョー(jaw)構造を安定化させるためのメカニズムを有し、かつ、該外科用クリップアプライヤが、格納されたクリップ量を使い果たしたときに、外科用クリップアプライヤを発射することを防止することによって、外科用クリップアプライヤのクリップ無しの発射を防止するメカニズムをも有する外科用クリップアプライヤに関連する。
【背景技術】
【0003】
(関連技術の背景)
腹腔鏡の処置が、腹部の内部において行われる。該処置は、小さな切開部分を介しており、皮膚における小さな入口切開部分を介して挿入される、細い内視鏡チューブまたはカニューレを介する。身体の別の部位において行われる最小限に侵襲性のある処置は、たいてい、概して「内視鏡」処置と呼ばれる。外科医は、入口切開部分を介して身体にチューブまたはカニューレデバイスを挿入および延伸し、アクセスポートを提供する。このポートは、これを介して様々な医療器具の挿入を可能にする。
【0004】
これらの器具、例えば当該のクリップアプライヤは、切開部分からかなり隔たった臓器、血管、導管、または体組織に対する外科的な処置を行うために用いられる。大抵これらの処置の間に、止血作用のあるクリップを血管または様々な導管に適用し、処置の間の体液の流れを防止する必要がある。様々な幾何学的形状を有する多くの異なる止血クリップが、用いられ得、それら全ては、本開示の範囲内である。
【0005】
最小限に侵襲性のある処置の1つの利点は、より小さな切開部分を介した内部臓器へのアクセスの結果である、患者へのトラウマの低減である。公知の内視鏡クリップアプライヤは、身体の空洞への単一の挿入の間に多数のクリップを適用することを可能にすることによって、より高度な、最小限に侵襲性のある処置の出現を大いに容易にした。市販の内視鏡クリップアプライヤは、概して10mmの直径を有し、10mmのカニューレを介して導入されるように適合される。他の市販の内視鏡クリップアプライヤも、概して約5mmの外径であり得、5mmのカニューレを介して導入されるように適合されている。
【0006】
最小限に侵襲性のある処置が、進化し続け、その利点が、さらなる臨床上の適用に延長されるにつれて、切開の大きさをさらに減少させ、それ故に、該切開を介して導入される全ての器具類の大きさをさらに減少させることが望ましくなった。
【0007】
制限された空間内で様々な機能を行うように意図された外科用器具の構造は、必然的に複雑である。これらの器具の組立てのプロセスは、大抵複雑であり、繰り返して様々な機能を行うために、多くの比較的に小さな部品を伴い得る。従って、そのような器具が組み立てられ得るように、最大限に容易な組立てにすることが望ましい。ジョーのねじれを最小限にする構造を有し、外科手術の部位において要求される切開の大きさをさらに最小限にする一方で、外科用の生体恒常性クリップの容易な適用を促進する内視鏡クリップアプライヤを提供することも望ましい。クリップアプライヤの中に、残存する生体恒常性クリップがもはや無いときに、外科医がクリップアプライヤを発射することを防止する(および、ハンドルをロックする)構造を有する内視鏡クリップアプライヤを提供することも望ましい。クリップアプライヤがクリップを発射し、適用したことを伝える、複数の重複する信号を外科医に提供する構造を有する内視鏡クリップアプライヤを提供することも、さらに望ましい。
【発明の概要】
【課題を解決するための手段】
【0008】
本開示の目的は、残存するクリップがないときにクリップ無しの発射を防止し、残存するクリップがないときには発射できない、外科用クリップアプライヤを提供することである。
【0009】
本開示のさらなる目的は、クリップが発射されたときに、外科医に信号を送る外科用クリップアプライヤを提供することである。
【0010】
本開示のさらなる目的は、クリップが発射されたときに、外科医に視覚的に信号を送る外科用クリップアプライヤを提供することである。
【0011】
本開示のさらに別の目的は、細長いノブを有することによって、外科医が、人差し指のみを用いて該細長いノブを回転させ内視鏡部分を回転させることを可能にする、外科用クリップアプライヤを提供することである。
【0012】
本開示のその上に別の目的は、製造が容易なドライバロックアウトメカニズムを有する外科用クリップアプライヤを提供することである。
【0013】
本開示の第1の局面によると、外科用クリップ適用装置が提供され、該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、該本体内に配置された多くの外科用クリップを有する。該装置は、ウェッジプレートに隣接する筺体内でバイアスした、移動可能な部材を有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させる。ウェッジプレートは、最も遠位の位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔が置かれた位置にジョーアセンブリを維持するように構成され、ウェッジプレート端は、装填の間のジョーアセンブリのねじれを低減する。移動可能な部材は、装填の間に、ウェッジプレートを最も遠位な位置に保持し、移動可能な部材は、装填の完了において偏向される。移動可能な部材は、偏向されるとウェッジプレートを解放し、回転可能な部材は、最も遠位な位置からのウェッジプレートの長手方向の近位の収縮を可能にする。
【0014】
本開示の別の局面によると、体組織への外科用クリップの適用のための装置が提供される。該装置は、ハンドルアセンブリを有し、該ハンドルアセンブリは、ハンドルと、該ハンドルに関して移動可能なトリガとを有する。該トリガは、トリガロックアウトノッチを有する。該装置はまた、ハンドル部分から遠位的に延伸しており、長手軸を定義する本体と、該本体内に配置された複数の外科用クリップと、該本体の遠位端の部分に隣接して取り付けられたジョーアセンブリとを有し、該ジョーアセンブリは、間隔を置いた位置と近接した位置との間を移動可能な第1および第2のジョー部を含む。該装置はまた、ジョーアセンブリに外科用クリップを個別に、遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成された、クリッププッシャを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能なアクチュエータをさらに有する。
【0015】
該装置は、第1のシャフトを有する第1の回転可能な部材と、第1の爪を有する第1のアームとを有する、ロックアウトメカニズムをさらに有する。第1のシャフトは、ハンドル部分を固定して係合させ、該メカニズムは、第2の回転可能な部材を有し、該部材は、第2のポストを有する該第2の回転可能な部材の半径位置のエスケープノッチと、該第2の回転可能な部材の内表面の内周に十分に配置された複数の歯とを有する。該メカニズムは、第2のポストを受けるためのアパーチャを有する第3の回転可能な部材を有し、該第3の回転可能な部材は、トリガと係合するように構成されている。
【0016】
爪は、第2の回転可能な部材の内表面を回転することによって歯とかみ合い、トリガが発射されるときに、該爪は、複数の歯のうちの次の歯に前進する。歯は、残存するクリップに対して数において相補的であり、クリップが使い果たされたときには、該爪は、エスケープノッチに前進する。トリガが発射され、クリップが使い果たされた場合には、第1の爪は、第2の回転可能な部材からトリガノッチへと横断する。該爪は、発射を防止するためにトリガノッチと嵌合する。
【0017】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供され、該装置は、ハンドル部分と、該ハンドル部分から遠位的に延伸しており、長手軸を定義する本体とを備えている。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置は、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。
【0018】
該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータと、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材とを有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させる。ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該端は、装填の間のジョーアセンブリのねじれを低減させ、アクチュエータは、信号デバイスをさらに作動させる。信号デバイスは、少なくとも1つのクリップが発射されたことを示す。
【0019】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置は、本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有し、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置は、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータを有する。該装置は、該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材をさらに有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させ、ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該端は、装填の間のジョーアセンブリのねじれを低減させる。アクチュエータは、少なくとも1つのクリップが発射されたことを示すように構成された可聴のデバイスをさらに作動させる。
【0020】
その上に別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、該本体内に配置された複数の外科用クリップとを有する。該装置はまた、該本体の遠位端に隣接するように取り付けられたジョーアセンブリを有し、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部をさらに含む。該装置はまた、第1および第2のジョー部を長手方向に移動可能なウェッジプレートと、ジョーアセンブリに外科用クリップを個別に遠位的に前進させ、一方で、ジョー部は、間隔を置いた位置にあるように構成されたクリッププッシャとを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータと、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材とを有する。アクチュエータは、長手方向にウェッジプレートを、所定の距離を最も遠位の位置に前進させ、ウェッジプレートは、最も遠位な位置において、第1および第2のジョー部の間に配置された端を有する。ウェッジプレート端は、外科用クリップの装填の間に、間隔を置いた位置にジョーアセンブリを維持するように構成される。該ウェッジプレート端は、装填の間のジョーアセンブリのねじれを低減させる。該装置は、回転可能な部材によってハンドルに接続された本体をさらに有する。回転可能な部材は、ハンドルおよび本体に固定して接続される。回転可能な部材の回転で、該本体が回転し、ジョー部が回転する。回転可能な部材は、第1の細長いノブ筐体と、複数のノッチが周りに配置された第2のノブとを有する、複数の部材である。第2のノブは、ノブ筐体上に配置される。複数の部材のうちの少なくとも1つは、本体を回転させるために、人差し指によって回転されるように適合される。
【0021】
本開示のさらに別の局面によれば、体組織に対する外科用クリップの適用のための装置が提供される。該装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む。該装置はまた、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあるように構成されたフィードバーを有する。該装置は、該本体内に少なくとも部分的に配置され、該ハンドル部分の作用に応答して長手方向に移動可能であるアクチュエータとともに、複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャをさらに有する。該装置はまた、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、該アクチュエータに接続された複数のラチェット歯を有するラックとを有する。少なくとも1つの歯を有する爪は、ラチェット歯を係合させるように構成される。該爪は、ハンドル部分においてバイアスされている。該アクチュエータが長手方向に移動されると、該爪の上を越えさせられる。該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている。
【0022】
該装置はまた、フィードバーの近接に配置されたバーを有する。該バーは、スプリングによってバイアスされており、クリップ搬送チャネルのシーリングとフロアとの間に収納されている。該クリップ搬送チャネルは、遠位窓を含む。クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させる。該バーが、該遠位窓と実質的に一直線に並ぶときに、該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させる。該第2の位置にある該フィードバーは、アクチュエータが近位的に移動することを防止し、それによって、該爪が、ラックのラチェット歯と係合するように操作する。該爪および該ラックは、該アクチュエータが長手方向に移動することを防止する。
【0023】
体組織に対する外科用クリップの適用のための装置は、ハンドル部分と、該ハンドル部分から遠位的に延びており、長手軸を定義する本体とを有する。該装置はまた、該本体内に配置された複数の外科用クリップと、該本体の遠位端に隣接するように取り付けられたジョーアセンブリとを有する。該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む。該装置はまた、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあるように構成されたフィードバーを有する。該フィードバーは、少なくとも1つの近位フィンを含む。
【0024】
該装置はまた、複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャを有する。該装置はまた、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能なアクチュエータを有する。該アクチュエータは、近位窓を含む。ジョークロージャ部材は、第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置にジョー部を移動させる。複数のラチェット歯を有するラックは、アクチュエータと接続される。該装置はまた、ラチェット歯をハンドル部分において傾いた爪と係合させるように構成された、少なくとも1つの歯を有する爪を含む。
【0025】
該アクチュエータが、長手方向に移動するときに、ラチェット歯は、爪の上を越えさせられる。該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている。該装置はまた、フィードバーの近接に配置されたバーを有する。該バーは、スピンドルによって傾けられ、クリップ搬送チャネルのシーリングとフロアとの間に収納されている。
【0026】
クリップ搬送チャネルは、遠位窓を含む。クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させる。該バーが、該遠位窓と実質的に一直線に並ぶときに、該スプリングによって偏かされた該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させる。
【0027】
第2の位置における該フィードバーは、アクチュエータの近位窓と係合する近位フィンを含む。フィードバーとアクチュエータとの係合は、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、実質的に中間位置において、爪をラックのラチェット歯と係合されるように操作する。該爪および該ラックは、該アクチュエータが長手方向に移動することを防止することによって、該アクチュエータをロックする。
【0028】
体組織に対する外科用クリップの適用のための装置は、クリップが該装置から放たれる度に、規則的に増加するように遠位的に移動するクリッププッシャを含む。該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、フィードバーは、第2の位置に偏向される。該第2の位置にある該フィードバーは、アクチュエータと係合する部分を有する。
【0029】
第2の偏向された位置にあるフィードバーは、収縮を防止するが、アクチュエータの前進は防止せず、それによって、爪をラックのラチェット歯と係合されるように操作する。該爪および該ラックは、アクチュエータが長手方向に移動することを防止し、それによって、該アクチュエータをロックする。
【0030】
本発明は、さらに以下の手段を提供する。
【0031】
(項目1)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップをバイアスするように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と、
k)該フィードバーの近位に配置されたバーであって、該バーは、スピンドルによってバイアスされ、クリップ搬送チャネルのシーリングとフロアとの間に収納されており、該クリップ搬送チャネルは、遠位窓を含む、バーと
を備えており、
該クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させ、該バーが、該遠位窓と実質的に一直線に並ぶときに、該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させ、該第2の位置にある該フィードバーは、該アクチュエータが、近位的に移動することを防止し、その結果として、該爪が、該ラックの該ラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが長手方向に移動することを防止する、装置。
【0032】
(項目2)
上記フィードバーは、近位フィンを有し、該フィンは、上記アクチュエータが、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0033】
(項目3)
上記フィードバーは、1対の近位フィンを有し、少なくとも1つは、上記アクチュエータが、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0034】
(項目4)
上記フィードバーは、1対の近位フィンを有し、該1対は、接続されており、「U」字の形状を有しており、そのうちの少なくとも1つは、上記第2の位置において近位的に移動することを防止するように構成されている、項目1に記載の装置。
【0035】
(項目5)
上記アクチュエータは、近位窓を有し、上記フィンは、該窓と係合することによって、該アクチュエータが、上記第2の位置において近位的に移動することを防止する、項目2に記載の装置。
【0036】
(項目6)
スプリングおよび上記バーは、上記クリッププッシャのチャネルに配置されており、該スプリングは、該バーの下に位置する、項目1に記載の装置。
【0037】
(項目7)
上記バーは、弾力のある部材である、項目1に記載の装置。
【0038】
(項目8)
上記ラックおよび上記爪は、上記ハンドルに位置する、項目1に記載の装置。
【0039】
(項目9)
上記複数のラチェット歯を有する上記ラックは、上記ハンドル部分と接続されており、上記爪は、上記アクチュエータと接続されている、項目1に記載の装置。
【0040】
(項目10)
上記遠位窓は、上記クリップ搬送チャネルの端に位置する、項目1に記載の装置。
【0041】
(項目11)
上記爪は、上記ラックと係合しており、上記クリップ搬送チャネル内にクリップが1つもないときに、該爪および該ラックは、上記アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0042】
(項目12)
上記爪は、上記ラックと係合しており、上記クリップ搬送チャネル内の上記複数のクリップのうちの2つのクリップがあるときに、該爪および該ラックは、上記アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0043】
(項目13)
上記フィードバーは、上記第2の位置にあり、
該フィードバーは、上記アクチュエータが近位的に移動することを防止することによって、上記ラックの実質的に中間位置において、上記爪を該ラックの上記歯と係合するように操作し、
該爪および該ラックは、係合しており、該係合によって該アクチュエータが長手方向に移動することを防止する、項目1に記載の装置。
【0044】
(項目14)
上記第2の位置において、上記フィードバーは、上記長手軸と平行ではない、項目1に記載の装置。
【0045】
(項目15)
上記フィードバーは、最初の位置から上記第2の位置に移動し、該第2の位置は、上記長手軸から偏向された位置である、項目1に記載の装置。
【0046】
(項目16)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にあり、該フィードバーは、少なくとも1つの近位フィンを有する、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップをバイアスするように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータであって、該アクチュエータは、近位窓を有する、アクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と、
k)該フィードバーの近位に配置されたバーであって、該バーは、スピンドルによってバイアスされ、クリップ搬送チャネルのシーリングとフロアとの間に収納されており、該クリップ搬送チャネルは、遠位窓を含む、バーと
を備えており、
該クリッププッシャが遠位的に移動する度に、クリップが該装置から放たれ、該クリッププッシャが、該バーを遠位的に移動させ、該バーが、該遠位窓と実質的に一直線に並ぶときに、該スプリングによって偏かされた該バーは、該遠位窓を介して移動することによって、該フィードバーを第2の位置に偏向させ、該第2の位置にある該フィードバーは、該アクチュエータの該近位窓と係合する該近位フィンを有し、該フィードバーおよび該アクチュエータの係合は、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を実質的に中間位置において該ラックと係合させるように操作し、
該爪および該ラックは、該アクチュエータが長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【0047】
(項目17)
上記アクチュエータは、スピンドルを備えている、項目16に記載の装置。
【0048】
(項目18)
上記フィードバーは、少なくとも2つの近位フィンを備えている、項目16に記載の装置。
【0049】
(項目19)
上記フィードバーは、端において接続され「U」字の形状を形成する、2つの近位フィンを備えている、項目16に記載の装置。
【0050】
(項目20)
上記スプリングは、リーフスプリングであり、該リーフスプリングおよび上記バーは、上記クリッププッシャの遠位に位置したチャネルに配置され、該リーフスプリングは、上記バーの下に配置され、上記クリップ搬送チャネルのフロアに関して上向きに上記バーを偏かせるように構成されている、項目16に記載の装置。
【0051】
(項目21)
上記バーは、かぎ状の近位端を有し、該かぎ状の近位端は、上記チャネルにおける上記クリッププッシャの一部と係合し、該バーは、該クリッププッシャと遠位に移動する、項目20に記載の装置。
【0052】
(項目22)
上記近位のかぎ状の端は、上記フロア上のアパーチャと係合することによって、上記クリップ搬送チャネルの上記フロアに関して上向きに上記ロックアウトを操作し、
上記バーが該クリップ搬送チャネルの上記遠位窓と一直線に並ぶときに、該近位のかぎ状の端は、該クリップ搬送チャネルのフロアに配置されたアパーチャと係合する、項目21に記載の装置。
【0053】
(項目23)
上記近位フィンは、上記近位窓において休止しており、上記アクチュエータが発射ストロークの間に長手方向に往復運動をするときに、該アクチュエータの移動と干渉しない、項目16に記載の装置。
【0054】
(項目24)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と
を備えており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【0055】
(項目25)
上記装置は、内視鏡の外科的な用途のために構成されている、項目24に記載の装置。
【0056】
(項目26)
上記装置は、肥満学上の手術のために構成された本体を有する、項目25に記載の装置。
【0057】
(項目27)
上記本体は、少なくとも30センチの長さを有する、項目24に記載の装置。
【0058】
(項目28)
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させ、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、爪と、
k)第2のロックアウトデバイスであって、該第2のロックアウトデバイスは、該ハンドル部分と該アクチュエータとの間の接続を破壊することによって、所定の力が該ハンドル部分に加えられるときに、該ハンドル部分の作動に応答する該アクチュエータの長手方向の運動を防止するように構成されており、該所定の力は、該爪から該ラチェット歯を押しのけるために必要な力よりも小さい、第2のロックアウトデバイスと
を備えている、装置。
【0059】
(項目29)
上記第2のロックアウトデバイスは、上記アクチュエータを上記ハンドルに接続するリンクと、該リンクを該アクチュエータに接続するシャーピンとを含む、項目28に記載の装置。
【0060】
(項目30)
上記シャーピンは、概ね円筒形であり、本体を有し、該本体は、第1の直径と、該第1の直径よりも小さい第2の直径を有する第2の区分とを有し、上記所定の力の適用で、該シャーピンは、第2の直径に沿って壊れる、項目29に記載の装置。
【0061】
(摘要)
体組織に対する外科用クリップの適用のための装置は、本体内に少なくとも部分的に配置され、ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータを含む。該装置は、ジョー部を近接した位置に動かすための、第1および第2のジョー部に隣接して配置されたジョークロージャ部材と、アクチュエータに接続されたラチェット歯を有するラックとを含む。該装置は、一連のラチェット歯と係合し、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止する爪を含む。クリッププッシャは、クリップが該装置から放たれる度に、規則的に増加するように遠位的に移動する。該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、フィードバーは、第2の位置に偏向され、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作する。
【図面の簡単な説明】
【0062】
【図1】図1は、外科用クリップアプライヤの斜視図である。
【図2】図2は、図1の外科用クリップアプライヤの別の斜視図である。
【図2A】図2Aは、表示されたパラメータを示す外科用クリップアプライヤの表示の正面図である。
【図3】図3は、外科用クリップアプライヤのジョー構造の拡大された斜視図である。
【図4】図4は、外科用クリップアプライヤの上面図である。
【図5】図5は、外科用クリップアプライヤの第1の側面図である。
【図6A】図6Aは、本体の半分が除去された、外科用クリップアプライヤのハンドルアセンブリの側面図である。
【図6B】図6Bは、外科用クリップアプライヤの本体の半分が除去された、図6Aに対する相対する側面図である。
【図6C】図6Cは、外科用クリップアプライヤのハンドルアセンブリの本体の半分が除去された図6Bの斜視図である。
【図7】図7は、部品が分離された状態での、クリップアプライヤのハンドル筐体の斜視図である。
【図7A】図7Aは、スピンドルと係合するスピンドルリンクの斜視図である。
【図7B】図7Bは、その中に多くのコンポーネントを有するノブの背面図である。
【図7C】図7Cは、ノブ筐体から分解されたノブの斜視図である。
【図7D】図7Dは、ノッチを有する外側管状部材の斜視図である。
【図7E】図7Eは、ブッシングを有する外側管状部材の斜視図である。
【図7F】図7Fは、図7Eのノブ筐体およびブッシングに接続されたノブの背面図である。
【図7G】図7Gは、ドライババーに接続するスピンドルリンクの図を示す。
【図7H】図7Hは、図7Gの線7H−7Hに沿ったドライババーに接続するスピンドルリンクの断面図を示す。
【図8】図8は、爪の斜視図である。
【図9】図9は、駆動部材の斜視図である。
【図9A】図9Aは、アクチュエータプレートの斜視図である。
【図9B】図9Bは、信号デバイスの斜視図である。
【図9C】図9Cは、LCDレバーの斜視図である。
【図9D】図9Dは、ウイッシュボーンリンクの斜視図である。
【図10】図10は、部品が分離された状態での、外科用クリップアプライヤの斜視図である。
【図10A】図10Aは、フィードバーの斜視図である。
【図10B】図10Bは、フォロワおよび外科用クリップの斜視図である。
【図10C】図10Cは、トリップブロックの相対する斜視図である。
【図10D】図10Dは、トリップブロックの相対する斜視図である。
【図10E】図10Eは、スピンドルの斜視図である。
【図10F】図10Fは、図10Eの詳細の拡大されたエリアである。
【図10G】図10Gは、図10Eの詳細の拡大されたエリアである。
【図11】図11は、スピンドルおよびドライバの遠位端の斜視図である。
【図12】図12は、トリップレバースプリングがスピンドル上にあるトリップレバーの斜視図である。
【図13】図13は、ウェッジプレートの斜視図である。
【図13A】図13Aは、図13のウェッジプレート上の「C」状の窓の斜視図である。
【図14】図14は、フィラコンポーネントの相対する斜視図である。
【図14A】図14Aは、フィラコンポーネントにおけるスプリングバー部材の上にある回転可能な部材の分解図である。
【図15】図15は、フィラコンポーネントの相対する斜視図である。
【図16】図16は、回転アセンブリの斜視図である。
【図17】図17は、オーバープレッシャアセンブリの斜視図である。
【図18】図18は、スピンドルおよびジョーアセンブリの斜視図である。
【図19】図19は、図18のスピンドルおよびジョーアセンブリの詳細の拡大されたエリアであり、フィードバーおよびプッシャはフィードバーに接続されている。
【図20】図20は、図18の詳細の拡大されたエリアである。
【図21】図21は、外科用クリップアプライヤの遠位端の拡大図であり、外側部材は除去されている。
【図22】図22は、外科用クリップアプライヤの斜視図であり、部品は除去され、クリップチャネル部材およびフォロワが多くのクリップを傾けている。
【図23】図23は、図22の詳細での拡大されたエリアである。
【図24】図24は、図22の詳細の拡大されたエリアである。
【図25】図25は、図22の詳細の拡大されたエリアである。
【図26】図26は、スピンドル、ドライバおよびジョーアセンブリの斜視図である。
【図27】図27は、図26の詳細の拡大されたエリアである。
【図28】図28は、カムリンクおよびウェッジプレートアセンブリの斜視図である。
【図29】図29は、図28の詳細の拡大されたエリアである。
【図30】図30は、図29の詳細の拡大されたエリアである。
【図31】図31は、フィラコンポーネントおよびジョーアセンブリの斜視図である。
【図32】図32は、図31のジョーアセンブリの拡大された斜視図である。
【図33】図33は、ウェッジプレートおよびドライバを含むスピンドルの遠位端の斜視図である。
【図34】図34は、ウェッジプレートおよびドライバを含むスピンドルの遠位端の斜視図であり、図33における、ウェッジプレートは除去されている。
【図35】図35は、発射の前の状態での外科用クリップアプライヤの、部分的に断面で示されている側面図である。
【図36】図36は、図35の詳細の拡大されたエリアである。
【図36A】図36Aは、ロックアウトメカニズムの第1の横側面図である。
【図36B】図36Bは、ロックアウトメカニズムを示す図36Aの第2の相対する横側面図である。
【図36C】図36Cは、ラチェットアームを有するロックアウトメカニズムを示す図36Aの別の第1の横側面図である。
【図36D】図36Dは、図36Cの線36D−36Dに沿ったロックアウトメカニズムの断面図である。
【図36E】図36Eは、ロックアウトメカニズムの第1の回転可能な部材、第2の回転可能な部材、および第3の回転可能な部材を示す斜視図である。
【図36F】図36Fは、ロックアウトメカニズムの第1の回転可能な部材の斜視図である。
【図36G】図36Gは、ロックアウトメカニズムの第3の回転可能な部材の斜視図である。
【図36H】図36Hは、ノッチを有するロックアウトメカニズムの第2の回転可能な部材の斜視図である。
【図36I】図36Iは、図36Hの図と相対するロックアウトメカニズムの第2の回転可能な斜視図であり、多くの歯を示している。
【図37】図37は、図35の詳細の拡大されたエリアである。
【図38】図38は、トリップレバーを示す図37の詳細の拡大されたエリアである。
【図39】図39は、フォロワを示す図37の詳細の拡大されたエリアである。
【図40】図40は、カムリンクを有する図37の外科用クリップアプライヤの遠位端の、断面で示された側面図である。
【図41】図41は、図40の詳細の拡大されたエリアである。
【図41A】図41Aは、スプリングバー部材と係合する回転可能な部材を有するフィラコンポーネントの上面図である。
【図41B】図41Bは,図41の線41B−41Bに沿った外科用クリップアプライヤの遠位端の断面図である。
【図42】図42は、フィードバーがクリップと係合する図37の外科用クリップアプライヤの遠位端の、断面で示された側面図である。
【図42A】図42Aは、図42の詳細の拡大されたエリアである。
【図43】図43は、ウェッジプレートおよびジョーアセンブリの斜視図である。
【図44】図44は、図43の詳細の拡大されたエリアである。
【図45】図45は、線45−45に沿って取られた図43上面図である。
【図46】図46は、ジョーおよびウェッジプレートを示す図45の詳細の拡大されたエリアである。
【図47】図47は、ウェッジプレートおよびカムリンクを示す図45の詳細の拡大されたエリアである。
【図48】図48は、最初のストロークの始まりでのハンドル筐体の、断面で示される側面図である。
【図49】図49は、ラックおよび爪を示す図48の詳細の拡大されたエリアである。
【図49A】図49Aは、可聴クリックレバーおよびリブを示す図48の詳細の拡大されたエリアである。
【図50】図50は、図49に類似した図48の詳細の拡大されたエリアである。
【図50A】図50Aは、図48のロックアウトメカニズムの詳細の拡大されたエリアである。
【図51】図51は、フィードバーおよびトリップレバーの、断面で示される側面図である。
【図52】図52は、フォロワの、断面で示される側面図である。
【図53】図53は、スピンドルおよびカムクランクを有する外科用クリップアプライヤの内視鏡部分の、断面で示される側面図である。
【図54】図54は、スピンドル運動を示す図53の詳細の拡大されたエリアである。
【図55】図55は、カムスロットにおけるカムリンクの運動を示すウェッジプレートおよびフィラコンポーネントの上面図である。
【図56】図56は、クリップを前進させるフィードバーを示す、断面で示される側面図である。
【図57】図57は、遠位的に動くウェッジプレートおよびカムリンクの上面図であり、ウェッジプレートはフォロワに対して動き、回転可能な部材は回転し、スプリングバー部材と接触している。
【図58】図58は、ジョーに入るクリップを示す、断面で示される側面図である。
【図59】図59は、カムリンクおよびウェッジプレート運動のさらなる上面図であり、スピンドルのカム特徴はカムリンクと接触している。
【図60】図60は、ジョー構造に入るウェッジプレートの上面図である。
【図61】図61は、ウェッジプレートの丸みのある遠位端が装填のためにジョー構造を開いている様子を示す斜視図である。
【図62】図62は、ウェッジプレートのカムスロットにおいてカムリンクのさらなる前進を示す上面図である。
【図63】図63は、フィードバーと係合するトリップレバーを示す、断面で示される側面図である。
【図64】図64は、フィードバーが最も遠位位置にある状態でジョーに入ったクリップを示す、断面で示される側面図である。
【図65】図65は、ウェッジプレートの「C」状の窓における回転可能な部材を示す上面図である。
【図65A】図65Aは、フィラコンポーネントのスプリングバー部材を偏向させるウェッジプレートの「C」状の窓における回転可能な部材を示す低面図である。
【図66】図66は、フィードバーとの係合から遊離されるトリップレバーを示す、断面で示される側面図である。
【図67】図67は、ウェッジプレートおよびフィードバーの収縮を示す、断面で示される側面図である。
【図67A】図67Aは、大きなストロークでのトリガを有するハンドル筐体の側面図である。
【図68】図68は、スピンドルのさらなる前進を示す、断面で示される側面図である。
【図69】図69は、ウェッジプレートの収縮およびスピンドルのさらなる前進を示す、断面で示される側面図である。
【図70】図70は、ジョー構造から収縮するウェッジプレートの斜視図である。
【図71】図71は、スピンドルはドライバと係合し、ドライバロックアウト部材はスピンドルと係合する、断面で示される側面図である。
【図71A】図71Aは、ハンドルセクションの側面図であり、クリックレバーは回転可能であることにより、可聴警報のために筐体内のリブと接触する。
【図72】図72は、フルストロークでのトリガを有するハンドル筐体の側面図である。
【図73】図73は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの、断面で示される側面図である。
【図74】図74は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図75】図75は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図76】図76は、外科用クリップの周囲でジョーを閉ざすようにカムを動かすドライバの順序図である。
【図77】図77は、インパクトスプリングを含むオーバプレッシャメカニズムの、断面で示される図である。
【図78】図78は、血管上で形成される外科用クリップの斜視図である。
【図79】図79は、爪リセットの詳細の拡大されたエリアである。
【図80】図80は、収縮するスピンドルを示す、断面で示される側面図である。
【図81】図81は、フィラコンポーネントの回転可能な部材がリセットするのを示す上面図である。
【図82】図82は、カムリンクがウェッジプレート内でリセットするのを示す上面図である。
【図83】図83は、カムリンクがウェッジプレート内でリセットするのを示す上面図である。
【図84】図84は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図85】図85は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図86】図86は、ロックアウトメカニズムが回転し、第1の回転可能な部材の軸部分がエスケープノッチを横断して通り抜け、トリガにおける対応するノッチと係合し、トリガを発射から妨げるのを示す側面図である。
【図87】図87は、フィラコンポーネント、ウェッジプレート、リンクカムおよびスピンドルを有するクリップアプライヤの別の実施形態の分解図である。
【図88A】図88Aは、ウェッジプレートおよびスピンドル上に休止するフィラコンポーネントの上面図である。
【図88B】図88Bは、フィラコンポーネントは除去されている状態で、スピンドル上で休止しているリンクカムおよびウェッジプレートの上面図である。
【図88C】図88Cは、スピンドル上で休止しているリンクカムおよびウェッジプレートの上面図であり、スピンドルのカムスロットは、図示目的のために想像線で示されている。
【図89】図89は、ウェッジプレートと係合し、図88Cの窓92に沿ってスピンドルのカムスロットにおいて横断するリンクカムのクローズアップ図である。
【図90】図90は、本クリップアプライヤの代替的な信号装置の第1のコンポーネントの斜視図である。
【図91】図91は、図90の信号デバイスの第1のコンポーネントの上面図である。
【図92】図92は、第1のコンポーネントの側面図である。
【図93】図93は、第1のコンポーネントのチャネルの正面図である。
【図94】図94は、本クリップアプライヤの代替的な信号デバイスの第2のコンポーネントの斜視図である。
【図95】図95は、リブ部分および横クリップストリップを有する本クリップアプライヤのハンドル部分の斜視図である。
【図96】図96は、組み立てられた信号デバイスを有するハンドル部分の斜視図である。
【図97】図97は、血管に適用されたクリップの斜視図である。
【図98】図98は、スプリングの側面図である。
【図99】図99は、本開示の別の実施形態によるクリップ搬送チャネルの上面図である。
【図100】図100は、図99のクリップ搬送チャネルの拡大図を示す。
【図101】図101は、ロックアウトバーの上面図を示す。
【図102】図102は、図101のロックアウトバーの側面図を示す。
【図102A】図102Aは、図101のロックアウトバーの斜視図を示す。
【図103】図103は、図101および図102のロックアウトバーならびに図98のスプリングの部分的組立図を示す。
【図104】図104は、クリップフォロワの上面図を示す。
【図105】図105は、遠位ノーズおよび一対の近位フィンを有するフィードバーの側面図を示す。
【図106】図106は、クリップフォロワのチャネルにおける図101のロックアウトバーの上面図である。
【図107】図107は、フィードバーの遠位開口部の中に延びているロックアウトバーを示す。
【図108】図108は、フィードバーの遠位開口部の中に延びているロックアウトバーを有するクリップアプライヤの実施形態の別の図を示す。
【図109】図109は、カバーが除去され、フィードバーの遠位開口部の中に延びているロックアウトバーを示すクリップアプライヤの実施形態の別の図を示す。
【図110】図110は、カバーおよびフィードバーが除去され、フィードバーの中にロックアウトバーを示すクリップアプライヤの実施形態の別の図を示す。
【図111】図111は、ロックアウトバーおよびスプリングが、クリップフォロワのチャネルの中にあるクリップフォロワの別の底面図を示す。
【図112】図112は、図111の線16−16に沿ったチャネルの中にロックアウトバーおよびスプリングを有するクリップフォロワの断面図である。
【図113】図113は、遠位ノーズおよび遠位開口部を有するフィードバーの上面図である。
【図114】図114は、近位窓を有するクリップアプライヤのスピンドルの断面図である。
【図114A】図114Aは、近位窓を有するクリップアプライヤのスピンドルの断面図である。
【図115】図115は、近位窓を有するクリップアプライヤのスピンドルの底面図である。
【図116】図116は、図114のスピンドルの窓の拡大図である。
【図117】図117は、リセットされるか、または「休止」もしくは定位置にある爪およびラックの側面図である。
【図118】図118は、中間位置にあり、スピンドルの収縮を妨げるように構成されている爪およびラックの側面図である。
【図119】図119は、本開示によるシャーピンの斜視図である。
【図120】図120は、スピンドルをロックアウトしているラックおよび爪を示すクリップアプライヤの側断面図である。
【図121】図121は、トリガの最初の運動を示すクリップアプライヤの側断面図である。
【図122】図122は、トリガのさらなる運動を示すクリップアプライヤの側断面図である。
【発明を実施するための形態】
【0063】
(実施形態の詳細な説明)
様々な実施形態が、図面を参照して以下本明細書に記述される。
【0064】
外科用クリップの挿入中に、外科用クリップアプライヤのジョーを間隔を置いて安定した位置に維持するように構成されたジョーコントロールメカニズムを有する新規な内視鏡外科用クリップアプライヤが開示されている。新規な内視鏡外科用クリップアプライヤは、ロックアウトメカニズムも有している。ロックアウトメカニズムは、残りの止血クリップがないときに、外科用クリップアプライヤが発射されることを防ぐ。新規な内視鏡外科用クリップアプライヤは、クリップが発射されたことを外科医に警告する警告デバイスも有している。開示されたジョーコントロールメカニズム、ドライバロックアウトおよび警報デバイスはすべて内視鏡外科用クリップアプライヤに示されかつ記述されている一方、開示されたメカニズムは一対の圧縮可能なジョーを有する任意の外科用クリップアプライヤまたは別の器具に適用可能であることには留意されるべきである。参照が図面に対してなされ、様々な図を通して、同様な参照番号は、同様な要素を指す。
【0065】
本開示の新規な内視鏡外科用クリップアプライヤが開示されている。ここで図1を参照して、外科用クリップアプライヤ10は、ハンドルアセンブリ12およびハンドルアセンブリ12から遠位に伸びる細長い管状部材14を有する内視鏡部分を一般的に有する。ハンドルアセンブリ12は、熱可塑性材料から作られ、細長い部材は、生体適合性材料から作られる。一実施形態においては、材料は、ステンレススチールまたは別の実施形態においてはチタニウム材料もしくは合金であり得る。一対のジョー16が、管状部材14の遠位端に取り付けられている。ジョー16はトリガ18によってアクチュエートされる。トリガは、ハンドルアセンブリ12に移動可能に取り付けられている。
【0066】
ジョー16は、適切な好適な生体適合性材料、例えばステンレススチール、チタニウムまたは適切な合金からも形成される。内視鏡部分は、ノブ20も有している。ノブ20は、ハンドルアセンブリ12の遠位端に回転可能に取り付けられ、細長い管状部材14に接続されて、細長い管状部材14の長手方向の中心軸に対して、細長い管状部材14およびジョー16の360度回転を提供する。クリップアプライヤ10の重要な局面は、ノブ20が、外科医の指を使用して簡単に回転されるような適切な構成を有することであり、以下に詳細に論議される。
【0067】
ここで図2を参照して、内視鏡外科用クリップアプライヤ10は、ディスプレイ22を有している。ディスプレイ22は、当技術分野で公知の任意のデバイスであり得、イベントの指示を提供する。イベントは、クリップアプライヤ10の手順または動作に関連し得る。好ましい実施形態におけるディスプレイ22は、液晶ディスプレイであり得る。しかしながら、別の実施形態において、ディスプレイ22は、プラズマディスプレイ、1つ以上の発光ダイオード、発光用のディスプレイ、マルチカラーディスプレイ、デジタルディスプレイ、アナログディスプレイ、パッシブディスプレイ、アクティブディスプレイ、いわゆる「捻れネマティック」ディスプレイ、いわゆる「スーパー捻れネマティック」ディスプレイ、「デュアルスキャン」ディスプレイ、反射ディスプレイ、バックライトディスプレイ、アルファニューメリックディスプレイ、モノクロディスプレイ、いわゆる「低温ポリシリコン薄膜トランジスタ」またはLPTS TFTディスプレイ、または手順もしくはクリップアプライヤ10に関するパラメータ、情報もしくはグラフィックスを示す任意の他のディスプレイ22であり得る。一実施形態において、ディスプレイは液晶ディスプレイ22または「LCD」である。LCD22は、クリップアプライヤ10の1つ以上の動作パラメータを外科医に表示する白黒の、またはカラーディスプレイであり得る。ここで図2Aを参照して、LCDディスプレイ22の正面図が示されている。ディスプレイ22は、表示されたパラメータを示す。一実施形態において、表示されるパラメータは、残りのクリップの量、使用されたクリップの数、位置パラメータ、手術の使用時間、または手順の任意の他のパラメータであり得る。LCD22は、テキスト、グラフィックまたはそれらの組み合わせであり得る。一実施形態において、LCD22は、LCD22バッテリとLCD22の接触との間に配置され、バッテリが格納中にドレインされることを防ぐMylarまたは別のポリメトリック絶縁材料で作られているタブを有し得る。タブは、クリップアプライヤ10から延びていることにより、タブの除去を可能にする。いったん除去されると、タブはクリップアプライヤ10から引き抜かれ、バッテリがLCD22の電気的な接触と接触し、LCD22に電気が通じることを可能にする。本クリップアプライヤ10の一実施形態において、LCD22は、ディスプレイを拡大するレンズを有している。LCD22のレンズは、任意の所望のサイズにディスプレイを拡大することにより、外科医が離れたところから容易にディスプレイを読み取ることを可能にする。ここで図3を参照して、ジョー16は、単一の外科用クリップをその中に受けるためのチャネル24を有している。公知のように、外科用のクリップは、例えば身体の空洞などに止血クリップを適用するためのクリップアプライヤ10の装填構造によってチャネル24に適用または置かれ得る。
【0068】
ここで図6Aを参照して、内視鏡外科用クリップアプライヤ10のハンドルアセンブリ12は、ハンドルアセンブリ12の第1の開いた横側から示されている。内視鏡外科用クリップアプライヤ10は、ウイッシュボーンリンク26に接続されているトリガ18を有している。ウイッシュボーンリンク26は、一端がトリガスロット28を介して、トリガ18に接続され、他端には第1および第2のウイッシュボーン状部材30、32を有している部材である。第1および第2のウイッシュボーン状部材30、32は、駆動部材36を受けるためのスペース34を形成する。
【0069】
駆動部材36は、図示されているようにハンドルアセンブリ12の長手方向に配置された実質的に平坦な部材であり、1つ以上の駆動構造を動かしてジョー16を装填し、アクチュエートして完全に形成されたクリップを形成し、それから次のクリップ適用のために最初の位置にリセットするように意図されている。リターンスプリング38は、駆動部材36を囲むように配置されている。駆動部材36は、駆動メカニズムに接続されてクリップアプライヤ10を発射し、適切に接続され、トリガ18がアクチュエートされかつウイッシュボーンリンク26が駆動装置36を長手方向方式かまたは遠位方式に前進させた後、リターンスプリング38は、駆動部材36およびトリガ18を、次のクリップ適用のためにもとの位置に戻す。
【0070】
駆動部材36は、有利である。いったん駆動部材36が遠位的に前進し始めると、中間位置での動きを妨げることによって、オープンクリップアプライヤ10が完全にアクチュエートする前にトリガ18が不慮的に戻ることを、駆動部材36は防ぐ。駆動部材36は、ラック40を有している。ラック40は、その上側42に配置されている。
【0071】
ラック40は、多くの歯44を有し、歯44は、別の相補的な表面と係合して、外科用クリップアプライヤ10が完全にアクチュエートされる前に、トリガ18および駆動部材18が不慮的にもどることを防ぐ。外科用クリップアプライヤ10は、爪リターンスプリング48を有している爪46を有している。爪46は、爪スプリング48で傾かされてラック40の歯44と係合する。歯44および爪46は、以下本明細書に記述されているように、トリガ18が完全にアクチュエートされる前にトリガ18が解放されることを防ぐ。
【0072】
ここで図6Bを参照して、クリップアプライヤ10は、アクチュエータプレート50をさらに有している。アクチュエータプレート50は、ハンドルアセンブリ12に長手方向に配置されている。アクチュエータプレート50は、駆動部材36より下に配置され、LCDレバー52に動作可能に接続されている。
【0073】
ここで図6Bを参照して、LCDレバー52は、LCDディスプレイ22に動作可能に接続されるための好適な構造である。レバー52は、LCDディスプレイ22における好適なメカニズムまたはコンタクトを動かし、LCDディスプレイ22をアクチュエート可能としてクリップアプライヤ10の1つ以上の動作パラメータを表示するようにする。一実施形態において、アクチュエータプレート50は、LCDレバー52に接続され、対応するLCDディスプレイ22の構造またはコンタクトを動かして外科医が発射しなければならない残りのクリップの量を表示するようにする。別の実施形態において、ディスプレイは多くの発光ダイオード、液体プラズマディスプレイ、電子的デバイスまたはディスプレイ、色が変わって見えるディスプレイまたはその組み合わせであり得る。
【0074】
ここで図6Cを参照して、アクチュエータプレート50は、信号デバイス54をさらに有している。信号デバイス54は、アクチュエータプレート50に接続され、オープンクリップアプライヤ10が外科用クリップを発射したという可聴の信号をユーザに提供し得るデバイスである。信号デバイス54は、クリップアプライヤ10がいったん発射されると、音を発して、外科医に可聴のフィードバックを提供する。別の実施形態において、信号デバイス54は、特徴的な音を発する別の電子的な装置であり得る。信号デバイス54は、ハンドルまたはトリガの偏向、クリップの圧縮、クリップの負荷、新しいクリップの負荷、すべてのクリップの使い尽くしに応答して音を発し得、またはクリップアプライヤ10イベントに依存していくつかの異なる音を発し得る。特徴的な音は、クリック音(click)、チャープ音(chirp)、音、声、録音、音の組み合わせ、または任意のデシベルレベルでの任意の音響波であり得る。信号デバイス54は、クリップアプライヤ10のイベントに応じて識別をさらに提供し得る。一実施形態において、信号デバイス54は、通常の動作中に音を発し得、イベントの起こりと同時に音の発信を止める。様々な構成が可能であり、すべては本開示の範囲内にある。
【0075】
さらに、図6Cを参照して、クリップアプライヤ10は、ロックアウトメカニズム56をさらに有している。ロックアウトメカニズム56は、クリップアプライヤ10に格納されたクリップの量が使い尽くされたとき、外科医がオープンクリップアプライヤ10をクリップなしで発射するのを防ぐための構造である。ロックアウトメカニズム56は、トリガハンドルAにおける相補的な構造と係合して、以下にさらに詳細に記述されている方式で、トリガ18がウイッシュボーンリンク26をさらに動かし、かつアクチュエートすることを妨げる。
【0076】
ここで図7を参照して、相対する側からのハンドルアセンブリ12の分解図が示されている。外科用クリップアプライヤ10は、実質的に「S」形状の部材であるアクチュエータプレート50を有している。図7および図9Aに最もよく示されているように、アクチュエータプレート50は、第1の直交形状の窓60を有している第1の部分58、および第2の直交形状の窓64を有している第2の部分62を有している。
【0077】
アクチュエータプレート50の第1の端に、アクチュエータプレート50は、一対のタイン66を形成する角の取られた曲線部分を有している。相対する第2の端68は、突起70を有している。突起70は、LCDレバー52上でチャネル72と係合する。ピン74は、第1の直交形状の窓60を介して配置され、アクチュエータプレート50を、ウイッシュボーンリンク26を介して駆動部材36に接続している。この方式で、トリガ18が遠位的に駆動部材36を動かすとき、接続ピン74は第1の窓60を介して動かされるとすぐ、いったん接続ピン74が第1の直交形状の窓60の外側遠位エッジ76に接触すると、類似の方法で遠位的にアクチュエータプレート50をも動かす。
【0078】
再び、図7および図9Bを参照して、クリップアプライヤ10は可聴クリックレバー78を有する信号デバイス54をさらに有している。可聴クリックレバー78は、アクチュエータプレート50と相対する側にあり、第2の窓64を通り抜ける。信号デバイス54は、可聴クリックスプリング80をも有している。信号デバイス54は、アクチュエータプレート50による長手方向の遠位運動と同時に、相補的なハンドル表面上で回転しかつ偏向する可聴クリックレバー78をも有している。アクチュエータプレート50は、可聴クリックレバー78(図9B)のポスト77を偏向させ、レバー78を筐体上の表面リブと接触させる横側82(図9Aに図示)を有する第2の窓64を動かす。この接触で、クリップアプライヤ10が外科用クリップを発射したという可聴の警報または可聴の信号が生じる。
【0079】
図7を参照して、クリップアプライヤ10は、第1のレバー部分84、開口部86およびチャネル72を有する曲線部材88と共に、回転可能な部材であるLCDレバー52(図9Cに最もよく見える)をさらに有している。チャネル72は、アクチュエータプレート50上で突起70とコミュニケートし、図7に示される第1のハンドル筐体部分94とコミュニケートするペッグ92を有する。
【0080】
図7を参照して、LCD22はLCDレンズ98、およびLCD22に接続されているLCDカウンタコンタクトプレート100を有するLCDユニット96を有している。LCDカウンタコンタクトプレート100は、アクチュエートされるとすぐ、LCDディスプレイ22を前のパラメータから現在のパラメータ、例えば一実施形態において、クリップアプライヤ10における残りのクリップの量へ変える。
【0081】
クリップアプライヤ10は、爪スプリング48を有する爪46をも有している。爪46は、ラック40の歯44と係合する端を有している。
【0082】
図7を参照して、クリップアプライヤ10は、アーム104およびアーム104に接続されている爪106を有する第1の回転可能部材またはシャフト102と共にロックアウトメカニズムをさらに有している。第1の回転可能部材102は、概略円筒状であり、スプリング105を介して、ハンドルの相補的な表面に接続されている。一実施形態において、第1の回転可能部材102は、ロックアウトアームである。
【0083】
ロックアウトメカニズム56は、第1の回転可能部材102からオフセットされている第2の回転可能部材112を有している。一実施形態における第2の回転可能部材112は、ロックアウトホイールであり、その周りに間隔をおいて配置された多くの歯116を有するロックアウトホイール112の内側の円周114を有する概略円形の構成を有する。ロックアウトホイール112は、それに接続されている第1のアーム122を有する第3の回転可能な部材120に開口部を介して接続されている最も中心のポスト118を有し、ポスト118は、ハンドル部分12にさらに接続されている。トリガ18が発射されるとき、ハンドル部分12に接続されている第1の回転可能な部材102とトリガ18に接続されている第3の回転可能部材120との間に相対的な動きが存在する。こうして、ロックアウトホイール112は、最も中心のポスト118がハンドル部分12に接続されるとき、所定の量回転するように意図されている。ロックアウトホイール112が回転するとき、第1の回転可能部材102の爪106は前進する。トリガ18が、発射されてクリップを発射するたびに;爪106は、歯116の数の間の1単位長さを横断し、本明細書に論議される有利なラチェティング(ratcheting)配列のために、そこで休止する。ロックアウトホイール112は、その放射状部分において直交形状のノッチ110であるエスケープノッチ110を有している。エスケープノッチ110は、第1の回転可能部材102の爪106が、ロックアウトホイール112の内側の位置または内側の円周114からエスケープノッチ110を介して外側へ横切り、参照文字Aによって示されるトリガ内の相補的な構造と係合し、トリガ18がウイッシュボーンリンク26をさらに動かしかつアクチュエートすることを防ぐことを可能にする。
【0084】
クリップアプライヤは、シャフトアセンブリ124を有するノブ20をさらに有している。スピンドルリンク126は、図7Aに示されるスピンドル128に接続する。ここで図7Gおよび図7Hを参照して、ドライババー36はスピンドルリンク126と接続する。ジョー16に相対する近位の側のスピンドルリンク126は、スピンドルリンクフック185を有している。ドライババー36は、角度のついたフック部材186を有している。角度のついたフック部材186は、ドライババー36の遠位側184にある。ここで、図7Gの線7H−7Hに沿った断面図を参照して、ドライババー36の角度のついたフック部材186は、スピンドルリンクフック185と嵌合する。図示のように、駆動部材36は、このように遠位方式でスピンドルリンク126を前進させる。再びここで図7Aを参照して、(スピンドルリンクフック185に対して)スピンドルリンク126の相対する遠位端は、円形ボス接続188を用いてスピンドル128に接続されている。この方式で、スピンドル128は、参照矢印Bによって示されるように、スピンドルリンク126から独立して回転し得る。
【0085】
ここで図7Bを参照して、図5の線7B−7Bに沿ってノブ20の断面図が示されている。ノブ20は、ノブ20の開口部またはボア134において互いに接続されている第1の本体半分130および第2の本体半分132を有している。
【0086】
ここで図7Cを参照して、ノブ20は、ノブ20と接続する平面先細り表面138を有するノブ筐体136と接続する。再び図7Bおよび図7Cを参照して、ノブ20はそれを貫通して配置されているボア134を有している。ノブ筐体136は、管状部材142を介して配置された第1のスロット144および第2のスロット146を有する外側管状部材142をさらに有し、外側管状部材142は、そのそれぞれの相対する横側に、「C」状の第1の開口部148、および第2の「C」開口部150を有している。
【0087】
特に、ノブ筐体136は、非常に有利である。なぜならば、ノブ筐体136は、外科医が人差し指を使用することによって単に片手で管状部材14を回転させ、ノブ20の横側に触れて、時計回りかまたは反時計回りかいずれの方向にでもノブ20を回転させることを可能にするのに適切な細長い円筒状の形状を有するからである。これは、一部の外科医によって嫌われる管状部材14を両手で回転させる動作を未然に防ぎ、管状部材14のより人間工学的な動作または回転を提供する。
【0088】
ここで図7Cを参照して、ボア134の内表面のノブ20は、第1のアーム152および第2のアーム154を有しており、これらは、外表面から反対にボア134の中に延びており、それぞれノブ筐体136の第1の「C」状の開口部148および第2の「C」状の開口部150と嵌合している。
【0089】
再び、図7Bおよび図7Eを参照して、外側チューブ14は、第1の開口部158’および第2の開口部160’を有するブッシング156をさらに有し、第1のピン162は第1の開口部158’を通って延びており、第2のピン164は第2の開口部160’を通って延びている。ここで、図7Eを参照して、ブッシング156は、ブッシング156の半径方向の位置から延びているタブ166をさらに有する。タブ166は、ノブ筐体136の中のノッチと係合する。ブッシング156は、第2のタブ166’も有する。第2のタブ166’も、その回転のために図7Dに示される管状部材14におけるノッチ168と係合する。様々なコンポーネントをアクチュエートするために、スピンドル128は、管状部材14を通って長手方向の動きのために取り付けられている。
【0090】
ここで、図8を参照して、前に記述された爪46の斜視図が示されている。爪46は、開口部169が貫通して配置されている3角形状の部材である。爪46は、上側176に多くの角度のついた表面170、172、174をも有し、かつ相対する底側180には歯係合構造178を有することにより、図6Dの駆動部材36において示されるようにラック40の歯44と係合する。図示されているように、駆動部材36は、開口部182を有することにより、図9Dのウイッシュボーンリンク26と嵌合し、かつ第1の側181、および遠位方式のスピンドル128の前進のために角度のついたフック部材186を有する、相対する第2の側184を有する。
【0091】
ここで図9Dを参照して、ウイッシュボーンリンク26は、ピン74によりアクチュエータプレート50の図9Aの第1の長手方向状の窓60を介して駆動部材36に接続されている。突起70を有するアクチュエータプレート50は、図9CのLCDレバー52におけるチャネル72と接続し、アクチュエータプレート50は、図9Bに示される信号デバイス54にさらに接続される。信号デバイス54は、開口部188を有することにより、ハンドル筐体と嵌合する。可聴クリックレバー78は、弾力性の表面191を有する球根状の端190を有することによりクリックレバー78の回転と同時に、球根状の端191は別のハンドル表面またはリブと鋭く接触し、これにより、音響波がハンドルアセンブリ12から発され、外科用クリップが発されたことを知らせる。信号デバイス54は、さらにポスト77を有し、ポスト77は、図9Aの第2の窓64を介して接続され、アクチュエータプレート50が遠位的に動くときレバー54を回転させる。
【0092】
ここで図10を参照して、オープンクリップアプライヤ10の内視鏡部分16の様々なコンポーネントの分解図が示されている。クリップアプライヤ10は、外側管状部材14を有している。外側管状部材14は、第1の端192および第2の端194を有する概略円筒形部材である。第1の端192は、ボアを介してスピンドルリンク126に接続されている。述べられたように、スピンドルリンク126は、スピンドル128に接続されている。外側チューブ14は、スピンドル128の周りに配置されている。クリップアプライヤ10は、ピン162、164を有している。ピン162および164は、ブッシング156の横側を介して延伸する。ピン162、164は、ブッシング156に対して内側にバイアスされ、外側管状部材14と接触する。クリップアプライヤ10はさらにスプリング196を有することにより、ブッシング156を前進することから妨げている。スプリング196は、ノブ20に接続されているノブ筐体136に中に配置されている。
【0093】
クリップアプライヤ10は、細長い管状部材14のボアを介して配置された連動スピンドルリンク126をさらに有している。本クリップアプライヤは、多くの異なるアセンブリを有することにより、多くの異なるクリップアプライヤ機能を実行する。クリップアプライヤ10は、スピンドルメカニズム128を有することにより、管状部材14を横断して駆動メカニズムをアクチュエートし、ジョー16を閉じ、完全に形成されるクリップを形成する。ジョー16を装填するために間隔を置いた状態にジョー16を維持するために提供され、いったんジョー16が装填されると収縮するウェッジ機能のためのメカニズムを、クリップアプライヤ10は有する。クリップアプライヤ10は、クリップをジョー16にフィードするフィーダ機能も有している。クリップアプライヤは、クリップ格納機能、および次のその装填のために格納されたクリップを傾かせるクリップフォロワ機能も有している。
【0094】
様々なコンポーネントをアクチュエートするために、図10のノブ20の上に示されるアクチュエーションメカニズムまたはスピンドル128が提供されている。スピンドル128は、細長い管状部材14を介して長手方向の遠位のおよび近位の運動のために取り付けられている。スピンドル128は、遠位端204上に、スピンドル128の遠位端204から延び、選択的にクラミング表面と係合し、外科用クリップの周りでジョー16を閉ざす、ドライババー200およびスライダジョイント202を有するクラミングメカニズムを有している。
【0095】
スピンドル128は、スライダジョイント202上にラッチ部材206、およびスピンドル128上にカムリンク208をさらに有している。ラッチ部材206は、スピンドル128の方向にカムを取り付ける。ラッチ部材20は、スピンドル128の対応するスロットの中にカムを取り付ける。ラッチ部材206は、ドライババー200が遠位的に動くことを可能にする。スピンドル128が遠位的に動いて、スピンドル128とドライババー200との間の所定のドエル(dwell)距離を減じるとき、ラッチ部材206はまた、ドライババー200がジョー16をアクチュエートすることから妨げる。スピンドル128は、カム特徴(feature)210または膨らんでいるエッジを有することにより、遠位的前進中にスピンドル128の長手方向の軸に対して垂直方式に別の構造を動かす。
【0096】
クリップアプライヤ10は、所望の組織への適用に対して1つまたは多くの外科用クリップ300を保持する。クリップアプライヤ10は、細長いクリップチャネル部材302を有することにより、クリップチャネル部材302より上に整列された方式で示される多くの外科用クリップ300を保持している。細長いクリップチャネル部材302は、細長い管状部材14に対して長手方向に動かない。クリップアプライヤ10は、フォロワスプリング308に接続されたフォロワ306を有する。フォロワスプリング308は、クリップチャネル部材302において、クリップを遠位的に作用する。クリップアプライヤ10はチャネルカバー310をも有し、これは、クリップチャネル部材302の上に横たわり、フォロワ306およびフォロワスプリング308およびクリップ300を、クリップチャネル部材302において遠位的に保持しかつ案内する。クリップアプライヤ10は、ノーズ312を有することにより、クリップチャネル部材302を横断してジョー16の間のチャネル24の中に入るクリップ300を方向付ける。
【0097】
クリップアプライヤ10は、フィードバー400も有することにより、クリップ300をジョー16の間のチャネル24の中にフィードする。フィードバー400は、相対的な動きも提供する。ここでクリップチャネル部材302の遠位的な部分を参照して、フィードバー400が示されている。この遠位的な位置でのフィードバー400は、クリップ300をジョー16の間のチャネル24に前進させる。ここでジョー16に相対する近位の位置を参照して、フィードバー400は、プッシャスプリング402(図10)を有している。プッシャスプリング402は、フィードバー400を長手遠位方向に傾かせる。プッシャスプリング402は、トリップブロック406におけるノッチ404の下の相補的な位置に配置されている。トリップブロック406の遠位側で、トリップブロック406は、クリップチャネルカバー部材304に隣接している。フィードバー400は、トリップブロック406より上に示されている。フィードバー400は、フック408を有している。フック408は、トリップブロック406のノッチ404において係合している。クリップアプライヤ10は、案内ピン401をさらに有している。案内ピン401は、プッシャスプリング402を介して配置され、プッシャスプリング402を整列させるために必要である。フック408は、トリップブロック406の下で、案内ピン401およびプッシャスプリング402と係合する。この方式で、フック408は、ノッチ404を介して配置され、案内ピン401を係合する。プッシャスプリング402および案内ピン401は、フィードバー400を傾かせ、フィードバー400が遠位的に前進することを可能にする。さらに、プッシャスプリング402を介して配置された案内ピン401は、それだけで完備したアセンブリを可能にする。スピンドル128がプッシャ400を前進させるために、スピンドル128は、トリップレバー500および傾きスプリング502を有している。トリップレバー500は、フィードバー400と係合され、外科用クリップ300をジョー16の間のチャネル24の中に遠位的に前進させる。
【0098】
クリップアプライヤ100は、ウェッジプレートスプリング602を有するウェッジプレート600も有している。ウェッジプレート600は、くり抜かれた多くの直交形状の窓604を有する平坦なバー状の部材である。ウェッジプレートスプリング602は、ラッチ開口部608内にあるウェッジプレート600におけるタング(tongue)606を取り囲む。ウェッジプレートスプリング602は、ウェッジプレート600が、遠位的に前進させられてジョー16をクリップ装填のために分離した後、遠位的の位置から近位の位置に収縮されることを可能にする。ウェッジプレート600は、窓604とタング606との間にある「C」状の窓610も有する。
【0099】
クリップアプライヤ10は、フィラコンポーネント700を有している。フィラコンポーネント700は、回転可能な部材702およびスプリングバー部材704を有している。スプリングバー部材704は、フィラコンポーネント700に配置された開口部706の中にある。回転可能な部材702は、特定な特別な範囲での動きが可能であり、かつ第1の近位の端708、および第1の端708に相対する第2の相対する遠位端710を有する。回転可能な部材702の動きの範囲は、任意の比較的わずかなまたは任意の比較的大きな、回転または運動の範囲であり得る。本クリップアプライヤ10は、任意の特定な回転度、または任意の特定な運動の方式、例えば円、楕円または任意の幾何学的な回転パターン、原点、軸、座標または運動に、いかなる方式においても制限されない。さらに、部材702は、代替的に、任意の平面のまたは当技術分野で公知の別の不規則な方式で単に動く。様々な構成が可能であり、本開示の範囲内である。
【0100】
クリップアプライヤ10は、ジョー16をさらに有している。ジョー16は、第1のジョー部材16aおよび第2のジョー部材16bで作られている。第1のジョー部材16aと第2のジョー部材16bとの間にはクリップチャネル24がある。理解されるように、ジョー部材16aおよび16bは、内側に動き得、閉じ、圧縮して、チャネル24において完全に形成されるクリップを形成する。ジョー16は、その外側表面に第1の高められたカム取り付け表面212および第2の高められたカム作動面(camming surface)214も有している。第1の高められたカム作動面212および第2の高められたカム作動面214は、ジョー16を閉ざしかつ圧縮するための別の駆動カム作動面の選択的係合を可能にする。
【0101】
ここで、図10Aを参照して、フィードバー400の図が示されている。フィードバー400は、トリップレバー500との係合のための長方形状の窓410を有する長手方向の部材である。フィードバー400は、フィードバーの底側412に配置されたフック408を有している。フィードバー400は、遠位端にプッシャ414をさらに有することにより、チャネル302を搬送するクリップにおける外科用クリップ300と係合しかつ操作する。
【0102】
図10Bに示されるように、フィードバー400は、クリップ搬送チャネル302をスライドさせることによってクリップ300を、クリップ搬送チャネル302において遠位的に押しかつこれに作用するフォロワ306と協働する。図10Cおよび図10Dに示されるように、第1の位置および相対する第2の位置の両方においてトリップブロック406が示されている。
【0103】
上に論議されたように、トリップブロック406は、ノッチ404を有し、また第1のおよび第2の歯をつけられた部材420を形成する角度のついた表面も有する。第1のおよび第2の歯をつけられた部材420の各々は、本明細書で論議されるトリップレバー500の対応する表面との係合のためである。図10Cおよび図10Dのトリップブロック406のノッチ404は、図10Aに示されているフィードバー400のフック408の受け入れのためである。図10Aに示されるフィードバーの窓410からトリップレバー500を遊離するために、図10Cおよび図10Dトリップブロック406は、図10に示されるトリップレバー500と係合する第1のおよび第2の歯をつけられた部材420を有している。第1のおよび第2の歯をつけられた部材420は、トリップレバー500を図10Aの窓410から遊離する。
【0104】
ここで図10Eから10Fを参照して、スピンドル128が示されている。図10Fを参照して、スピンドル128は、第1の直交する空洞222および第2の直交形状の空洞224を有することにより、トリップレバー500を受け、かつレバー傾きスプリング502を受ける。第1の直交する空洞222は、ピボティングボス226(図10F)を有することにより、トリップレバー500が第1の位置から第2の回転可能な位置へピボットすることを可能にする。トリップレバー傾きスプリング502は、第2の空洞224の中で休止する。図10に示されているスプリング502は、製造の容易さのために、傾きスプリング502を接続するための任意のボスまたは部材なく、そこに休止する。ここで、図10Gに示されるように、スピンドル128の相対する位置を参照して、スピンドル128は、クラミング特徴210を有する溝209、およびカムリンク208が休止して遠位的に作用されることを可能にする別の空洞228を有する。以下にさらに詳細に論議されるように、スピンドル128は、遠位的に前進してクリップアプライヤ10の駆動コンポーネントと係合する。
【0105】
図12を参照して、トリップレバー傾きスプリング502は、点線で示されるようにスピンドル128の第2の空洞224と連動する第1および第2の湾曲した端504、506を有している。トリップレバー傾きスプリング502は、第2の部材508をさらに有している。第2の部材508は、スピンドル128の通常の表面に相対して、外向きに傾いている。第2の部材508は、トリップレバー500と接触する。トリップレバー500は、回転運動のためピボティングボス226と係合するC状端510、およびトリップレバー傾きスプリング502より上に延びている別の端512を有している。前に論議されたように、トリップレバー500をフィードバー400から遊離するために、トリップブロック406は、選択的にトリップレバー500を係合し得、トリップレバー500をフィードバー400の窓410から遊離し得る角度のついた表面または歯をつけられた表面420を有している。
【0106】
ここで、図11を参照して、スピンドル128は、ウェッジプレート600と係合可能なカムリンク208を有している。カムリンク208は、そこから延びているカムリンクボス230を有している。カムリンク208は、ストローク中にスピンドル128によって遠位的に促される。
【0107】
スライダジョイント202は、チャネル250でのスピンドル128と近位端248で、接続されている。相対する側で、スライダジョイント202は、「T」状端252を有している。T状端252は、ドライババー200と接続されている。スライダジョイント202は、スライダジョイント202における開口部254を介して動くように配置され、別の部材とリンクし、スライダジョイント202がドライババー200を前進させることから妨げるリンクであるラッチ部材206を有し、このようにして、クリップ300をジョー16にフィードする最初のストローク中に、ドライババー200のカム作動面256が、ジョー16を圧縮することから妨げる。
【0108】
図13〜13Aを参照して、ウェッジプレート600が示されている。ウェッジプレート600は、ウェッジプレートスプリング602を有している。ウェッジプレートスプリング602は、ウェッジプレート600の傾き装置を提供する。ウェッジプレート600は、ウェッジプレートスプリング602によって傾かされる。スプリング602は、点線で示されるようにタング606を取り囲む。ウェッジプレート600は、「C」状開口部、またはそこにくり抜かれた窓610を有する。
【0109】
「C」状開口部または窓610は、フィラコンポーネント700の回転可能部材702を選択的に係合する。ウェッジプレート600は、カム表面614を有するカムスロットまたは溝612も有している。カムスロットまたは溝612は、ウェッジプレート600の動きを制御する所定の形状を有している。カムスロットまたは溝612は、スピンドル128におけるカムリンク208と協働して、ウェッジプレート600を遠位的に動かしてジョー16を若干分離することにより装填する。カム表面614もカムリンク208と協働してウェッジプレート600を、管状部材14内で近位的に動かすことにより、ジョー16は、いったん装填されると、チャネル24内でクリップ300を圧縮する。
【0110】
ウェッジプレート600は、丸みのある遠位端616を有することにより、ジョー16を装填のために分離する。ウェッジプレート600は、近位窓622を有することにより、ウェッジプレート600の収縮を制限する。
【0111】
図14および図14Aを参照して、第1の位置および図15に示される第2の相対する位置におけるフィラコンポーネント700が示されている。フィラコンポーネント700はC状端712、およびフィラコンポーネント700の最も中心部分においてピン716によって接続される開口部714を有している回転可能な部材702を有している。回転可能な部材702は、ウェッジプレート600における対応する構造と接続して、ウェッジプレート600の動きを制御する。フィラコンポーネント700の相対する側には、開口部718がある。回転可能な部材702は、第1の端708、および相対する第2の端710を有する。第1の端708は、スプリングバー部材704および回転可能な部材702の間で傾き行動を可能にするスプリングバー部材704との接触によって傾かされる。
【0112】
フィラコンポーネント700は、フィラコンポーネントカムスロット720も有している(図15に図示)。フィラコンポーネントカムスロット720は、カムリンク208のボス230を受けるように構成されている。フィラコンポーネント700は、ストップ722も有することにより、ウェッジプレート600の近位収縮を制限し、かつ部材724も有する。部材724はウェッジプレートタング606およびスプリング602と係合する。
【0113】
ここで、図16〜図17を参照して、スピンドル128および関連する駆動コンポーネントが示されている。ブッシング156は、図17に示されるように、それに接続されるスプリング196を有することにより、ジョー16のオーバーストローク状態を可能にする。スプリング196は、過剰な力がジョー16に適用されることを妨げる。
【0114】
ここで、図18〜図20を参照して、スピンドル128が示されている。フィードバー400が、下向きの態様で延びており(図19)、プッシャ414はクリップ搬送チャネル302の中に延び、クリップ300と係合する。プッシャ414は、クリップチャネル部材302におけるクリップ300の各々を、ジョー16の間のチャネル24の中に前進させる。図19に示されるクリップアプライヤ10の遠位領域を参照して、クリップアプライヤ10は、「C」状部材416を有し、これは、ノーズ312を取り巻き、その周りに配置された組織ストップとして機能する。上に論じられたように、ノーズ312は、チャネル24に導入された単一のクリップを補佐する。クリップアプライヤ10は、多くのT状タブ418も有している。タブ418は、クリップ搬送チャネル302、チャネルカバー310およびノーズ312を共に一体ユニットとして保持するためのものである。
【0115】
図20に示されるジョー16に対して相対する近位側を参照して、スピンドル128は、トリップレバー500を有している。トリップレバー500は、図示のようにフィードバー400の窓410を通って延びており、フィードバー400を遠位的に(管状部材14を介して)前進させ、プッシャ414を遠位的に動かして、クリップ300をジョー16の間のチャネル24に導入する。
【0116】
図21〜図24は、クリップ搬送チャネル302における多くのクリップ300を示す。クリップ搬送チャネル302は、その周りで曲がった多くのフィンガ420を有することにより(図23)クリップ300をクリップ搬送チャネル302の中にサポートしかつ保持する。図24を参照して、フォロワ306の部分的に組み立てられた斜視図を示している。フォロワ306は、クリップ搬送チャネル302に配置され、フォロワスプリング308は、遠位方向にフォロワ306を傾かせかつ前進させる。フォロワスプリング308は、クリップチャネル302におけるクリップ300に力を与える。図21に示されるように、クリップアプライヤ10は、クリップチャネル302上で多くの「T」状タブ418を有することにより、アセンブリを共に維持する。
【0117】
ここで、図25を参照して、クリップアプライヤ10はスピンドル128上にトリップレバー500を有している。トリップレバー500は、スピンドル上側の反対に偏向するように傾かされ、前に論じられたようにトリップレバースプリング502によって傾かされるT状の部材である。ここで図26および図27を参照して、ドライババー200は、組み立てられた位置において、ウェッジプレート600またはジョー16で休止するように配置され、第1および第2の高められたカム取り付け表面212および214を遠位的に横切り、ジョー16を閉ざし、チャネル24におけるクリップ300を圧縮する。
【0118】
ここで図28〜図30を参照して、トリップブロック406、ウェッジプレート600、およびフィラコンポーネント700の組み立てられた相対的な部分が、ここで記述される。スピンドル128に配置されたウェッジプレート600が示されている。
【0119】
図29および図30を参照して、クリップアプライヤ10は、ストップ部材618を有することによりフィラコンポーネント700の運動を制限する。フィラコンポーネント700は、この図においてウェッジプレート600の下に配置されている。ウェッジプレート600は、「C」状の窓610を介して配置された回転可能な部材702を有する「C」状の窓610を有する。ウェッジプレート600は、カム表面614を有するカムスロット612も有する。カムリンク208は、この図において、ウェッジプレート600のトップに配置されている。カムリンク208は、ウェッジプレート600のカムスロット612とインターフェースするカムリンクボス230を有している。
【0120】
図29を参照して、ウェッジプレート600は、タング606の周囲にウェッジプレートスプリング602を有し、タング606の周囲にフィラコンポーネント700の部材724を有する。このようにして、タング606が、フィラコンポーネント700に対して遠位的に動くとき、ウェッジプレート600は近位的に戻るように傾かされる。フィラコンポーネント700は、ウェッジプレート600の近位窓622においてストップ722も有し、フィラコンポーネント700に対するウェッジプレート600の遠位運動をさらに制限する。
【0121】
追加的に、カムリンク208はまた、カムスロット612において遠位的に駆動されるように構成される。追加的に、カムリンク208は、この図においてウェッジプレート600の下に示されたフィラコンポーネントカムスロット720に乗せられるようにも構成される。
【0122】
カムリンク208が、スピンドル128の前進から遠位的に駆動されるとき、カムリンクボス230は、ウェッジプレート600のカム表面614と係合し、ウェッジプレート600を遠位的に駆動する。ウェッジプレート600は、図30に示される境界線624に到着するまで、遠位的に前進する。境界線624で、カムリンクボス231は、図30に示されるフィラコンポーネント700の遊離カム表面726と係合する。
【0123】
遊離カム表面726は、フィラコンポーネントカムスロット720における特徴である。特に、遊離カム表面726は、カムスロット612のカム表面614との係合から、カムリンクボス231を遊離する。この境界点624で、ウェッジプレート600はもはや遠位的に動かない。
【0124】
ここで図31〜図34を参照して、ウェッジプレート600、フィラコンポーネント700およびドライババー200の様々な組み立て部分が論議される。ウェッジプレート600は、スピンドル128上に配置されたフィラコンポーネント700を覆っている。ジョー16は、一対の柔軟なレグ(leg)17a、17bを有している。レグ17a、17bは、ベース部材17cに固定されている。ジョー16は、柔軟なレグ17a、17bに対して遠位端に位置している。一対のロッキングアーム19a、19bが、ベース17cから延びており、一対のタブ21a、21bで終わる。タブ21a、21bは、細長い外側チューブ14における一対の穴(図示されず)と係合することによって、ジョー16を細長いチューブ14に固定する。
【0125】
フィラコンポーネント700は、ジョー16に対してすぐ近位に配置され、細長い外側チューブ14に対して動かない。ここで図31〜図33を参照して、ウェッジコンポーネント600の図が示されており、これは、ドライババー200を覆い、かつスピンドル128上で休止する。図31において、ウェッジプレート600は、フィラコンポーネント700の下にある。図33において、ウェッジプレート600は、ジョーが除去された状態で最もよく示されている。ジョー16は、ウェッジプレート600の丸みのある遠位端616を受けるように構成されている。丸みのある遠位端616は、最初ジョー16を分離する。丸みのある遠位端616は、ジョー16のチャネル24におけるクリップ300の挿入中、ジョー16を、分離され、かつ整列された構成に維持する。
【0126】
ウェッジプレート600は、丸みのある遠位端616を有しており、これは、ジョー16を分離された状態に維持し、特にジョー16の曲がりまたは捩れを防ぐ。ジョー16の各々は、カム特徴23a、23bを有することにより、容易かつ反復可能な態様で、図32に示されるようにジョー16の間でウェッジプレート600の丸みのある遠位端616を案内する。カム特徴23a、23bは、図示されるように、ジョー16の内面にあり、第1の高められたカム作動面212と第2の高められたカム作動面214との間にある。
【0127】
図34を参照して、スピンドル128の図が示されており、これは、スライダジョイント202およびドライババー200を有し、ウェッジプレート600は図示目的のために除去されている。ドライババー200の遠位端は、ドライバカム作動面256を有している。ドライバカム作動面256は、ジョー16に対するドライババー200の遠位運動に応答して、協働し、かつジョー16(図32)の第1および第2の高められたカム作動面212、214の上を動く。
【0128】
ドライババー200の近位端を参照して、ドライババー200は、スライダジョイント202に接続されている。図34に示されるように、スライダジョイント202は、多くのラッチリトラクタ158、160を有している。ラッチリトラクタ158、160は、垂直に延びており、図33に示されるウェッジプレート600における窓604、604を介して延伸するように構成されている。図33に示されるように、これらのラッチリトラクタ158、160は、ジョー16に対するスライダジョイント202の収縮および遠位運動を制限する。本クリップアプライヤ10の一実施形態において、ラッチリトラクタ158が収縮する一方で、ラッチリトラクタ160が運動を制限する。あるいは、ラッチリトラクタ160が収縮する一方で、ラッチリトラクタ158が運動を制限し得る。別の実施形態において、各ラッチリトラクタ158および160は、制限運動および収縮の機能の間で切り替わり得る。さらに別の実施形態において、2つより多くのラッチリトラクタ158、160が提供され得る。様々な構成が、本開示の範囲内において可能である。
【0129】
ターゲット組織、例えば血管の周りにクリップ300をかしめるための、外科用クリップアプライヤ10の動作がここで記述される。ここで図35および図36を参照して、トリガ18は、圧縮されていない状態で示されており、駆動部材36はもとの位置にあり、スプリング38によってバイアスされている。
【0130】
図36Aを参照して、外科用クリップアプライヤ10のロックアウトメカニズム56が示され、ロックアウトメカニズム56はもとの最初の位置にある。図36Aに示されるように、第3の回転可能な部材120のアーム122は、図36Aに示されるようにハンドルアセンブリ12のチャネル121で休止する部分を有している。第3の回転可能な部材120は、ポスト118によってロックアウトホイール112と嵌合する。一実施形態において、第3の回転可能な部材120は、インデクサホイールである。
【0131】
図36Bに示される、相対する図を参照して、ロックアウトホイール112の内周は、多くの歯116およびエスケープノッチ110を有している。エスケープノッチ110は、内周114の周りの位置に配置されている。アーム104および爪106を有する第1の回転可能な部材102は、ロックアウトホイール112からオフセットされ、かつ配置されることにより、爪106は、クリップアプライヤ10が発射されるとき、歯116と選択的に係合する。
【0132】
トリガ18が、発射されたあと、第1の回転可能な部材102が、半径方向に前進させられることにより、爪106が歯116の別の歯と係合するように促される。図36C〜36Eを参照して、ロックアウトホイール112は、クリップ搬送チャネル302内のクリップの数に対して相補的な歯116の所定の数を有することにより、最後のクリップが発射されるとき、爪106はエスケープノッチ110と整列させられ、爪106がエスケープノッチ110の中に入ること、およびロックアウトホイール112から解放されることを可能とする。ここで図36cおよび36d、および図36F〜36Iを参照して、ロックアウトメカニズム56は、ラチェットアーム650および多くのラチェット歯652を有するラチェッティング配列も有している。第3の回転可能な部材120のラチェットアーム650は、ラチェット歯652と係合しかつトリガ18のアクチュエーションに応答して時計回りにロックアウトホイール112を回転させるように設計されている。トリガ18の解除と同時に、ラチェットアーム650はその後半径方向と反対に回転させられてラチェット歯の各々の上を動くことにより、各クリップ300が発射されたあと、爪106の半径方向の前進を邪魔することなく、ラチェットアーム650が反時計回りに動いてもとの位置にリセットされることを可能にする。
【0133】
図37〜図42において最もよく示されているように、および図38を参照して、発射されていない状態で、トリップレバー500は、スピンドル128によって搬送される。トリップレバー500は、トリップレバースプリング502によってバイアスされる。トリップレバー500はまた、フィードバー400において近位窓410と接触している。トリップブロック406は、トリップレバー500に対して遠位位置にある。
【0134】
ここで図39を参照して、クリップ300が遠位方向にバイアスされるようにフォロワスプリング408によってバイアスされるフォロワ306が示されている。
【0135】
ここで図40を参照して、スピンドル128上に休止しているカムリンク208およびウェッジプレート600を有するスピンドル128の別の断面図が示されている。スライダジョイント202は、ウェッジプレート600の下に配置され、ラッチ部材206はスライダジョイント202に配置されている。スピンドル128は、最初の距離、遠位的にカムリンク208を駆動することにより、カムリンク208上のカムリンクボス230はウェッジプレート600においてカムスロット612と係合する。
【0136】
図41および図41Aを参照して、フィラコンポーネント700を有する外側チューブ14の別の断面図が示されている。ウェッジプレート600は、フィラコンポーネント700の下に配置され、回転可能な部材702はその間に延びている。
【0137】
ウェッジプレート700は、開口部706に配置されているスプリングバー部材704を有している。スプリングバー部材704は、回転可能な部材702をバイアスし、かつその自由端で偏向し得る。回転可能な部材702は、点線で示されているフィラコンポーネント700の下にあるスピンドル128のカム特徴210に対して遠位に配置されている。いったん遠位的に駆動されると、スピンドル128が前進する。スピンドル128は、カム特徴210を前進させる。カム特徴210は、遠位的に駆動され、回転可能な部材702を時計回りに偏向させる。
【0138】
図41Bを参照して、図41の線41B−41Bに沿って様々なコンポーネントを示す、スピンドル128の断面図が示されている。クリップ300は、クリップチャネル302で休止し、その上側にフィーダバー400を有している。ウェッジプレート600は、示されているように、フィラコンポーネント700の下、かつスピンドル128より上にに配置されている。クリップチャネルカバー310は、クリップチャネル302より上に配置されている。
【0139】
図42Aに示されるように、プッシャ414は、クリップ300の各々をクリップチャネル24の中に前進させる。図42において、スピンドル128は、発射されていない状態で示されている。スピンドル128は、スライダジョイント202に接続するように配置されている。クリップアプライヤ10が発射されているとき、スピンドル128は遠位的に動く。所定の距離において、ラッチ部材206は、機械的に強制されて、カムで下がり、図73で示される基準矢印の方向に、スピンドル128のチャネル250と係合する(図11で最もよく示される)。これによって、スライダジョイント202は、ドライババー200と共に(駆動されるときは)遠位的に動くことが可能となる。このように、ドライババー200は、関係する表面と係合し得て、ジョー16の間でチャネル24において配置されたクリップ300の周りでジョー16を閉ざす。
【0140】
ここで、図43を参照して、もとの最も近位位置におけるウェッジプレート600およびジョー16の斜視図が示されている。ウェッジプレート600は、タング606の周りの窓604においてウェッジプレートスプリング602を有している。ウェッジプレート600は、「C」状の窓610をさらに有することにより、回転可能な部材702と係合する。カムリンク208は、カムスロット612に対して最も近位位置にある。
【0141】
図44〜図46を参照して、ウェッジプレート600は、カム特徴23aおよび23bと係合可能な丸みのある遠位端616を有することにより、後に示されるように装填のためにわずかに第1のジョー16aおよび第2のジョー16bを分離する。
【0142】
図47を参照して、カムリンク208は、この図において、カムリンク208より下に配置されたフィラコンポーネント700と共に、最初の近位位置でカムスロット612の中に最初に配置される。ウェッジプレート600の近位部分上の図示されるような「C」状の窓610を参照して、回転可能な部材702は、「C」状の窓610を介して延びている第2の端710を有している。回転可能な部材702の第1の端708は、ウェッジプレート600の下にあるフィラコンポーネント700上のスプリングバー部材704と接触している。
【0143】
図48を参照して、クリップアプライヤ10のアクチュエーションを開始するために、トリガ18は、矢印Cによって示されるとおり最初のスイングを介して動かされることにより、ウイッシュボーンリンク26は矢印Dによって示されるように駆動部材を駆動する。図49を参照して、駆動部材36上のラック40は、参照矢印Eによって示されるように爪46の下でスライドし始め、爪46は回転して参照矢印Fによって爪リターンスプリング48を偏向する。
【0144】
ここで、図49Aを参照して、信号デバイス54が示されている。信号デバイス54は、ハンドルアセンブリ12と一体である内部リブ2を有する。クリックレバー78は、クリックレバースプリング80と接触し、スプリング80からはね返されると同時に、クリックレバー78は、クリックレバー78の球根状の部分190を内部リブ2と接触させる。
【0145】
内部リブ2と接触すると同時に、球根状の部分190および内部リブ2は反響し、それによってクリップ発射の可聴の指示を外科医に提供する。同時に、駆動部材36およびラック40が遠位的に前進するとき、爪46は、図50に示されるように回転する。トリガ18がこの時点で解除されるとき、ラック40は任意の近位運動に対して爪46を抑制し、従ってトリガの解除、およびトリガ18の任意の部分的なまたは不慮の部分的なアクチュエーションを防ぐ。
【0146】
さらに、図50Aに示されるように、ロックアウトデバイス56のロックアウトホイール112は回転もして、爪106をロックアウトホイール112の内周114上の歯116と接触させる。図示のように、いったんクリップ300が発射されると、爪106は第1の歯スペース3から次の歯スペース5へと前進する。別のクリップ300が発射される場合、爪106はスペース5からスペース7へと回転し、いったん最後のクリップ300が発射されると、爪106がエスケープノッチ110に到着するまで反時計回りで前進し続ける。外科用クリップアプライヤ10が、ロックアウトホイール112の歯の数を常に超過するクリップ300の数で装填されることにより、外科用クリップアプライヤ10が決してクリップなしで発射しないこと、または換言すればクリップ300なしでは発射し得ないことを確実なものにする。
【0147】
図51を参照して、最初のストロークの間、スピンドル128は、所定の距離を動く。スピンドル128が、遠位的に所定の距離を動くとき、トリップレバースプリング502によってバイアスされたトリップレバー500は遠位的に動き、フィードバー400は、トリップレバー500によって遠位的に駆動され、フィードバー窓410と係合する。ここで図52を参照して、最も遠位のクリップ300は、プッシャ414によってジョー16のチャネル24の中に動かされるとき、フォロワ306は、遠位方向に動き、かつフォロワスプリング308によって前方に促される。フォロワ306は、ジョー16のチャネル24の中に個々に装填されるように、遠位的な態様でクリップ300の各々を動かす。
【0148】
ここで、図53〜図55を参照して、フィラコンポーネント700、ウェッジプレート600、およびカムクランク208との最初のストローク中の、クリップアプライヤ10の様々なコンポーネントの断面図が示されている。スピンドル128が遠位的に動くとき、カムクランク208上のボス230は、図55に示されるようにウェッジプレート600のカムスロット612上のカム表面614と接触する。カムリンク208は、スピンドル128と共に遠位的に動き、カム表面614も、フィラコンポーネント700に対して遠位的に促される。
【0149】
ここで、図56を参照して、プッシャ414は個々のクリップ300を促し、ジョー16のチャネル24の中に前進させ、一方相対する端では、スピンドル128は好適な幾何学的形状を有することにより、ジョー16をアクチュエートしかつ閉ざすためのドライババー200に接触しない。
【0150】
図57を参照して、カムリンク208が、遠位的に前進させられるとき、カムリンク208はカムスロット612のカム表面614と係合し、フィラコンポーネント700に対して遠位的にウェッジプレート600を動かす。同時に、「C」状の窓610も、遠位的に前進し、横表面625は回転可能な部材702の第2の端710と接触する。ウェッジプレートの横面625は、回転可能な部材702を促し、図示のように反時計回りに回転させる。回転可能な部材702の第1の端708は回転と同時に、フィラコンポーネント700上のスプリングバー部材704と接触し、フィラコンポーネント700のスプリングバー部材704を偏向させる。
【0151】
図58を参照して、フィードバー400は、傾斜面でプッシャ414を促し続け、傾斜面は単一のクリップ300に接触する。プッシャ414は、クリップ300をクリップチャネル24の中に導入し続ける。同時に、ウェッジプレート600は前進し続け、カムリンク208によって遠位的に駆動され、参照矢印によって示されるようにカムスロット612のカム表面614を促す。
【0152】
図59は、スプリングバー部材704が、回転可能な部材702によって偏向された後、基準矢印Gの方向にはね返る。はね返りが回転可能な部材702を時計回りに動かすことにより、第2の端710は、参照矢印Hで示されるように「C」状の窓610の横側626と接触する。従って、回転可能な部材702は、最も遠位な位置にウェッジプレート600を都合よく保持し、かつ装填のために完全にウェッジプレート600の位置を制御する。
【0153】
図59のこの最も遠位位置でカムリンク208は、カム特徴またはフィラコンポーネント700上のフィラコンポーネントカムスロット720の遊離カム表面726と接触する。カムリンク208はここで、カム表面614との係合から遊離され、ウェッジプレート600はその最も遠位位置にあり、カムリンク208はもはやウェッジプレート600を遠位的に駆動しない。
【0154】
図60および図61を参照して、ウェッジプレート600の丸みのある遠位端616がここで、図示されるように、第1および第2のジョーコンポーネント16a、16bのカム表面23a、23bの間に動き入れられる。ウェッジプレート600の丸みのある遠位エッジ616はこのように、チャネル24のサイズを穏やかに増加させるために、図示のように互いから相対する方向に、第1および第2のジョーコンポーネント16a、16bを動かす。これは、追加的に、ジョー部材16a、16bの各々が、互いに関して曲がることを抑制し、参照矢印によって示されるようにクリップ300がジョー16の間に挿入されているとき、クリップ300における任意の捩れを防ぐ。
【0155】
図62に最もよく示されるように、カムリンク208は、カムスロット612内で遠位的に前進し続け、一方ウェッジプレート600は、第2の端710で回転可能な部材702によって保持される。回転可能な部材702は、フィラコンポーネント700の開口部706のスプリングバー部材704と横壁との間で第2の端710においてスプリングバー部材704によって保持される。図63を参照して、スピンドル128は、ストロークを介して遠位的に動き続け、トリップレバー500はスピンドル128で遠位的に促される。
【0156】
フィードバー400の近位端において、フィードバー400のカム表面およびトリップレバー500は、互いに対して係合が遊離される。トリップレバー500は、トリップブロック406の歯をつけられた部材420によってフィードバー400の窓410に対して係合が遊離される。これによって、フィードバー400が、フィードバー400のバイアスのために、近位の最初の位置に戻ることが可能となる。このようにして、クリップ300がチャネル24の中へ装填されることが完了し、フィードバー400はスプリング張力によって最初の位置へ収縮される。
【0157】
図64を参照して、フィードバー400の遠位部分が、クリップ300の装填が完了して示され、その後、クリップアプライヤ10の最初の近位位置に収縮する。
【0158】
図65および図65Aに最もよく示されるように、ウェッジプレート600(図65)の底面図、およびフィラコンポーネント700(図65A)の上面図が示され、スピンドル128は点線で示されている。スピンドル128は、スピンドル128が遠位的に前進するとき、回転可能な部材702の第2の端710に接触するカム特徴210またはエッジを有する。相対する図で示されるように、カム特徴210は、遠位的に前進させられ、回転可能な部材702を反時計回りに偏向する。回転によって、回転可能な部材702の第1の端708は、フィラコンポーネント700のスプリングバー部材704を同様に偏向することになる。特に、回転可能な部材702は、ウェッジプレート600をもはや保持していず、ウェッジプレート600は、スプリングの捩れによって収縮することが可能となる。
【0159】
ここで図66を参照して、スピンドル128によって遠位的に動かされるとき、トリップレバー500は、フィードバー窓410との係合から遊離される。これによって、フィードバー400は、矢印Jによって示されるように近位方向に収縮することが可能となる。スピンドル128はストローク中に遠位的に前進し続ける。
【0160】
図67を参照して、ジョー16の間でチャネル24の中に挿入されたクリップ300が示されている。図67に最もよく示されるように、フィードバー400はここで、次のクリップ300に対して最も遠位位置に到着し、かつ装填が完了した後、収縮する。トリップレバー500は、フィードバー400との係合から遊離され、これによって、プッシャ414が近位的に収縮することが可能となる。図67に示されるように、フィードバー400は収縮することにより、プッシャ414のノーズは最初の位置と整列し、これにより、クリップの数のうち次のクリップ300をチャネル24の中に装填する。
【0161】
ここで図67Aを参照して、ハンドルアセンブリ12の断面図が示されている。トリガ18は、外科医によって発射され、通常参照矢印Aの方向に把持され、かつ引かれる。トリガ18は、アクチュエータプレート50の長手方向の窓60の端へ前進するウイッシュボーン26を動かす。遠位的に駆動されるアクチュエータプレート50は、突起70リンクを、LCDユニット96上で適切なLCDコンタクト100と接触して、LCDディスプレイ98のディスプレイを変化させ、かつ/または表示されたパラメータを変化させるLCDレバー52の方に動かす。ウイッシュボーンリンク26も、ドライバ部材36を遠位的に駆動し、スピンドル128を前進させる。
【0162】
信号デバイス54も、アクチュエータプレート50によって駆動され、クリックレバー78に回転を開始させることにより、ハンドルアセンブリ12のリブ2と接触する。
【0163】
ここで図68を参照して、ストロークが進行するとき、スピンドル128およびトリップレバー500は遠位的に動き続け、トリップレバー500は完全に下に下げられ、トリップブロック406の下になることによりフィードバー400はトリップレバー500から遊離し、フィードバーは、クリップチャネル302において次に最も遠位なクリップの近位的背後で収縮し得る。
【0164】
図69を参照して、ウェッジプレート600の上面図が示されている。前に論議されたように、スピンドル128は、カムリンク208をカムスロット612を介して遠位的に動かし続ける。ウェッジプレート600の「C」状の窓610、およびウェッジプレート600の上に示されているフィラコンポーネント700を参照して、回転可能な部材702が示されている。回転可能な部材702は、第1の近位端708および相対する第2の遠位端710を有している。回転可能な部材702の第2の遠位端710は、「C」状の窓610のより遠位領域の中にぱちっと跳ね返る。スプリングバー部材704は、もとの位置に偏向して戻る。
【0165】
図70を参照して、ウェッジプレート600の丸みのある遠位端616は、装填して近位位置に動いた後、ジョー16から収縮される。図70に示されるように、クリップ300は、ジョーによる圧縮力の適用のため、ジョーのチャネル24で休止する。
【0166】
図71Aを参照して、ハンドル部分12におけるアクチュエータプレート50は、遠位的に動き続け、可聴クリックレバー78に反時計回りに回転するように作用する。可聴クリックレバー78は次に、クリックスプリング80によって偏向される。図71に戻って、ラッチ部材206は、スピンドル128の方向にカムで動かされることにより、ドライババー200は、係合され得、遠位的に動いて要求される圧縮力を適用する。ドライババー200は、スピンドル128によって係合される。ドライババー200は、遠位的に駆動され、ジョーレグ16aおよび16bを互いの方向に強制することにより、クリップ300を血管に圧する。
【0167】
図72を参照して、フルストローク中のハンドルアセンブリ12の断面図が示されている。トリガ18が解除されるとき、爪46は自らをリセットすることにより、器具は収縮してリセットし得る。駆動部材36上のラック40は、フルストローク位置で爪からクリアされる。
【0168】
特に、可聴クリックレバー78は、球根状の部分190をリブ2に鋭く接触させて可聴の大きなクリック音を出すことによってハンドル12の筐体のリブ2に接触する。可聴クリックレバー78は、駆動部材36によって遠位的に動かされるアクチュエータプレート50によって回転させられる。
【0169】
図73を参照して、フルストロークでの内視鏡部分の断面図が示されている。スピンドル128のフルストロークが、クリップ300を最初の位置から、ジョー16において完全に挿入された位置まで移動させるために要求される。最も遠位位置まで駆動されたスピンドル128は、ドライババー200を動かしてクリップをかしめる。
【0170】
図74〜図76は、ジョー16a、16bの各々上にある第1および第2の高められたカム表面214、216と係合するカム表面256を有するドライババー200を示す。ドライババー200は、高められた表面に乗り、チャネル24においてクリップ300を有するジョー16を閉ざす。図75の線76−76に沿った断面に示されるように、図76は、ジョー16のカム高められた表面212、214の上で閉じ、チャネル24におけるクリップ300に圧縮を適用する「T」状のチャネルを有するドライババー200を示している。
【0171】
図77を参照して、クリップアプライヤ10は、締め付けによってジョー16によるチャネル24におけるクリップ300の過剰ストロークまたは過度の圧縮を防ぐために提供された安全メカニズムを有する。そのような過度の圧縮は、1つ以上の損害、例えばクリップ30の過度な圧縮またはドライババー200もしくはジョー16への損害を引き起こし得る。トリガ18が、図78に示されるようにクリップ300の完全な形成のために要求される完全なストロークを過ぎて締め付けられ続ける場合、図77のインパクトスプリング196が、ノブ20およびブッシング156によって規定されたスペースの中で圧縮する。インパクトスプリング196は、血管上のクリップを閉ざすために要求される力以上の力を吸収することによって、スピンドル128の任意のさらなる遠位運動を妨げる。
【0172】
図79に示されるようにトリガ18がいったん解除されると、爪46は爪リターンスプリング48のバイアス(bias)に対して回転することにより、爪歯178はラック40に沿って乗り、参照矢印Kによって示されるようにハンドルアセンブリ14をリセットする。駆動部材36は、収縮してリセットする。駆動部材36上のラック40は近位的に動き、爪46の下へ戻る。
【0173】
図80を参照して、スピンドル128は、近位位置へ収縮し、ラッチ部材206は、スピンドル128と相対して上方に駆動される。図81〜図83を参照して、カム特徴210を有するスピンドル128は近位的に収縮し、回転可能な部材702の第1の近位端708を回転させ、フィラコンポーネント700のスプリングバー部材704と接触する回転可能な部材702と接触する。
【0174】
図83を参照して、スピンドル128が近位位置において収縮するとき、カムリンク208はウェッジプレート600におけるカムスロット612を介して再び動く。スピンドル128は、近位的に収縮し続け、図82および図83に示されるようにカムリンク208は、近位的に引かれ、休止し、もとの位置へカムで動かされる。
【0175】
ウェッジプレート600はすでに完全に収縮したので収縮せず、スピンドル128による近位運動によって、カムリンク208はそのもとの位置へ戻ることは理解されるべきである。この位置において、クリップアプライヤ10は、再び最初の位置にあり、再発射されて血管に別のクリップ300を取り付ける。
【0176】
ここで図84〜図86を参照して、第1の回転可能な部材102は、ロックアウトホイール112の歯116を介して、ラチェットし続ける。ロックアウトホイール112は進行し、クリップ300の各々が発射されたあと半径方向に前進する。図85に示されているように、第1の回転可能な部材102は、爪106がロックアウトホイール112におけるエスケープノッチ110に到着するまで回転する。図85の矢印Kによって示されるように、エスケープノッチ110は次に、爪106がロックアウトホイール112から横断することを可能にする。
【0177】
図86を参照して、爪106は次に、トリガハンドル18に示されている対応するノッチ(A)と嵌合する。爪106がノッチAと嵌合すると同時に、クリップアプライヤ10はロックされ、爪106は、トリガ18によるさらなる発射または駆動部材36の駆動を妨げる。その後、クリップアプライヤ10は、好適な容器の中に配置され得る。最も好ましくは、クリップアプライヤ10は、ロックアウトホイール112における歯の数を超過するクリップ300の数で装填される。このため、クリップアプライヤ10は、その中にクリップがない状態で発射され得ない。
【0178】
ここで、図87〜図89を参照して、本クリップアプライヤ10の多くのコンポーネントの代替的実施形態が示されている。図87を参照して、ウェッジプレート750、リンクカム752、フィラコンポーネント754およびスピンドル756の分解図が示されている。
【0179】
ウェッジプレート750は、前に示された実施形態と類似し、丸みのある遠位端758を有し、近位端でフィラコンポーネント754の方に適切に傾けられている。丸みのある遠位端758は、論議されたように好ましくは遠位的な態様に動き、クリップ装填のためにクリップアプライヤ10のジョー16の間に配置される。ウェッジプレート750は、リンクカムノッチ760をさらに有している。リンクカムノッチ760は、ウェッジプレート750の実質的に中央部分にある。リンクカムノッチ760は、概略直交形状であり、ウェッジプレート750の横側の中に形成されている。リンクカムノッチ760は、ウェッジプレート750の中央へ延びるのに好適な深さを有する。あるいは、リンクカムノッチ760は、別の形状を有し得るか、または円形もしくは曲線的であり得る。様々な構成が可能であり、本開示の範囲内である。リンクカムノッチ760は好ましくは、リンクカム752がウェッジプレート750と係合しかつ遠位的に動かすことを可能にする。遠位運動は、ジョー16の間に丸みのある遠位端758を導入する。スピンドル756の遠位運動は、ウェッジプレート750を、所定の境界線で遊離させる。
【0180】
図87のウェッジプレート750の上に示されたフィラコンポーネント754は、他のコンポーネントに対して動かず、静止を保つように意図されている。フィラコンポーネント754は、リンクカム開口部762を有している。リンクカム開口部762は、フィラコンポーネント754の中に配置されてリンクカム752へのアクセスを可能にする円形状の特徴である。リンクカム開口部762は、ウェッジプレート750のリンクカムノッチ760に対して相補的な位置にある。位置は、リンクカム752の一部がリンクカムノッチ760と係合することを可能にする。
【0181】
リンクカム752は好ましくは、2つの不連続の部分を有する。リンクカム752は、第1のベース764および第2のアーム766を有している。第1のベース764は休止し、フィラコンポーネント754のリンクカム開口部762の中に回転可能に取り付けられている。第2のアーム766は、第1のベース764に接続されている。第2のアーム766は、ウェッジプレート750のリンクカムノッチ760と係合可能である。第2のアーム766は、スピンドル756のカムスロット768に乗るポスト767も有している。リンクカム752は好ましくは、回転して、別の部材を特定の固定した距離動かし、次に運動の終わりで上記部材をその最初の位置に戻す部分を有する。
【0182】
ここで、スピンドル756を参照して、スピンドル756は、図87のフィラコンポーネント754およびウェッジプレート750の両方の下に配置されて示され、カムスロット768を有している。理解され得るように、ここで遠位出発位置770からカムスロット768に沿って近位終末位置へ向かうカムスロット768を参照して、スピンドル756がストロークを介して遠位的に前進するとき、リンクカム752の第2のアーム766のポスト767が、カムスロット768に乗り、カムスロット768の正確な経路に従うことは理解される。特定の境界線が到達され、次にスプリング(図示されず)またはリンクカム752の別のバイアスデバイスが、ポスト767を収縮するまで、ポスト767は、カムスロット768におけるウェッジプレート750を駆動する。
【0183】
ここで図88Aを参照して、組み立てられた状態でウェッジプレート750上で休止しているフィラコンポーネント754が示されている。図から理解され得るように、リンクカム開口部762は、第1のベース部分764がフィラコンポーネント754のリンクカム開口部762の中にある状態で示されている。当業者は、第1のベース部分764は、フィラコンポーネント754のリンクカム開口部762の中で自由に動き得、または自由に回転し得ることは理解すべきである。当業者は、リンクカム752の第1のベース部分764は、任意の所望の回転範囲度で、かつ正確にフィラコンポーネント754の下で第2のアーム部分(図示されず)を回転し得、クリップアプライヤ10は、任意の特定の回転量に特に制限されないことはさらに理解すべきである。
【0184】
ここで図88Bを参照して、図88Aのフィラコンポーネント754が図示の目的だけのために除去されて、スピンドル756上に休止しているウェッジプレート750の図画示されている。ここで図88Aのフィラコンポーネント754が除去された状態で見られるように、リンクカム752は第2のアーム766を有し、ポスト(図示されず)はウェッジプレート750のリンクカムノッチ760と係合している。この方式で、リンクカム752の第2のアーム766が回転するとき、ポスト767は、ウェッジプレート750に遠位的に促し、特にジョー16の間で遠位側に示された丸みのある遠位端758に作用することによって、クリップを装填する。
【0185】
ここで、図88Cを参照して、ウェッジプレート750の下にある、スピンドル756のカムスロット768が破線で示されている。カムスロット768の最も遠位な出発位置付け772において、カムスロット768は、リンクカム752の方向付けをじゃましない。しかしながら、第2のアーム766のポスト767が、破線で示されるカムスロット768のカム特徴774に接触するとき、第2のアーム766が反時計回りにカムで動かされ、このようにして、リンクカムノッチ760と係合し遠位的に押すことによってウェッジプレート750を駆動する。スピンドル756が、ストロークを介して、遠位的に駆動され続けるとき、リンクカム752の第2のアーム766のポスト767は、カム特徴774を横断して過ぎる。特に、この位置付けで、ウェッジプレート758の丸みのある遠位端は、装填のためにジョー16の間にある。
【0186】
ここで図89を参照して、スピンドル756のカムスロット768における図88Cの窓92に沿ったリンクカム754のクローズアップ図が示されている。リンクカム754が、遠位的に駆動されて、スピンドル756のカム特徴774を過ぎるとき、リンクカム754は、カムスロット768の最も近位位置770の中に駆動される。カムスロット768のこの最も近位位置770は、いったんジョー16が装填され、スピンドル756がストロークを介して発射のために前進し続けるとき、ウェッジプレート750の収縮を可能にする。
【0187】
ここで図90を参照して、本クリップアプライヤ10の別の代替的な実施形態が示されている。この実施形態におけるクリップアプライヤ10は、信号デバイス54を有している。信号デバイス54は、前に記述されたように、外科イベントが起きたこと、起きつつあること、または未来に起きることの指示を外科医に提供する。
【0188】
外科イベントは、クリップアプライヤ10と関連し、外科手続きに関係し、またはその両方であり得る。一実施形態において、外科イベントは、クリップアプライヤ10に残る利用可能な外科用クリップの数と関係し得る。別の実施形態においては、外科イベントは、いつクリップ300が発射されることが推奨されるかに関する時間の指示に関係し得る。別の実施形態においては、外科イベントは、クリップアプライヤのクリップなしでの任意の発射に関係し得、またはこれを防ぎ得、かつ信号デバイス54は、クリップアプライヤ10における外科用クリップ300の数が少なすぎ、新しいクリップアプライヤ10または別のデバイスが調達されるべきであることを外科医に警告し得る。別の実施形態においては、外科イベントは、外科手術の他の重要なまたは便利なパラメータ、例えば外科手術の合計時間であり得る。様々な構成が可能であり、本開示の範囲内であり、かつ信号デバイス54は好ましくは、容易には見られ得ないパラメータのフィードバックで、特に他の内視鏡器具の使用と連携して、外科医を補佐する。
【0189】
ここで図90を参照して、信号デバイス54の第1のコンポーネント776が示されている。第1のコンポーネント776は、円筒形状の部材である。第1のコンポーネント776は好ましくは、近位オープニング778を有している。近位オープニング778は、チャネル780を有している。チャネル780は、第1のコンポーネント776の横側の中に延びている第1および第2の横サブチャネル780a、および780bも有している。近位オープニング778は、チャネル780の内部を取り囲むように配置された内部横面も有している。
【0190】
第1のコンポーネント776は、カム特徴784を有している遠位側782も有している。この実施形態において、遠位側782は、第1および第2の尖端786、788であるカム特徴784を有している。ここで図91を参照して、第1のコンポーネント776の上面図が示されている。図面から理解されるように、第1および第2の尖端786および788(第1の端は、図90に示される図面の側面図によって遮られる)は、遠位側782で第1のコンポーネント776から外側へかつ遠ざかって突出する。第1のコンポーネント776は棚787も有している。ここで図92を参照して、第1のコンポーネント776の上面図が示されている。第1のコンポーネント776(この図で)は、遠位側782から外側へ延びている第1および第2の尖端786、788を有している。
【0191】
ここで、図93を参照して、近位オープニング778およびチャネル780の図が示されている。理解され得るように、チャネル780は、好適な大きさとされ、その中に別の部材がアクセスすることを可能とする。チャネル780は、第1の横サブチャネル780aおよび第2の横サブチャネル780bを有する横側も有している。
【0192】
ここで図94を参照して、信号デバイス54の第2のコンポーネント790が示されている。第2のコンポーネント790は、レバータイプ構造であり、図示目的のために参照Aとして示されている、1つの回転可能な軸の周りに回転することができる。第2のコンポーネント790は、メインポスト792を有している。メインポスト792は、カム表面796を有するベース部分794上にあり、第1のコンポーネント776において挿入のためにある。好ましくは、カム表面796は、好適な大きさを有することにより、第1および第2の尖端786、788のうちの1つを受ける。特に、第2のコンポーネント790は回転する。
【0193】
第2のコンポーネント790は、別の第2のポスト902および第3のポスト904も有している。第2のポスト902は、連鎖906によってメインポスト792に接続され、第3のポスト904は、別の第2の連鎖908によってメインポスト792に接続されている。好ましくは、メインポスト792は、第1のコンポーネント776のチャネル780の中に延びており、かつ第1の尖端786はカム表面796の第1のサブリセス910と係合する。回転と同時に、第1のコンポーネント776の第1の尖端786は、カム表面796に乗り、第1のコンポーネント776を第2のコンポーネント790から遠ざかるように動かす。第1のコンポーネント776が回転され、第1のコンポーネント776を第2のコンポーネント790から、長手方向の軸Aと平行な方向に遠ざかるように動かすとき、第1の尖端786は、第1のサブリセス910から隣接する第2のサブリセス912へ有利にも横断する。
【0194】
ここで、図95として示されているクリップアプライヤ10のハンドル部分12の内部図を参照して、内側にかつハンドル部分12の中に延びているリブ部分914が示されている。リブ部分914は、円筒形状の特徴である。リブ部分914は、好ましくはハンドル部分12の中に成形される。リブ部分914は、横ストリップ916を有する。横ストリップ916は、円筒形状リブ部分914に一体的に接続されている直交形状の部材である。
【0195】
図96は、図95に示されるハンドル部分12の部分と嵌合するクリップアプライヤ10のハンドル部分12の相対する横側の内部図を示す。図95は、第1のコンポーネント776の棚787上に休止するスプリング901を有するクリップアプライヤ10の信号デバイス54の部分的組立図を示す。図95から理解され得るように、リブ部分916(図95に図示)の横ストリップ916は、第1の円筒形の部分776を介して、係合しかつ配置されている。横ストリップ916は、第1のコンポーネント776を回転することから妨げる。第1のコンポーネント776がリブ部分914(図95に図示)の固定された横ストリップ916に対して回転するように試みるとき、横ストリップ916は接触し、第1のコンポーネントを、第1の横サブチャネル780aの横側との接触により動くことから妨げる。
【0196】
なお図95を参照すると、ドライババー918は、アクチュエータプレート920に接続されている。この実施形態におけるアクチュエータプレート920は、その近位側にノッチ922を有する。ノッチ922は、第2のコンポーネント790の第2のポスト902と係合する。ドライババー918が遠位的に駆動されるにつれ、ドライババー918はまた、同様な方法でアクチュエータプレート920に遠位的に作用する。ノッチ922を有するアクチュエータプレート920もまた、第2のコンポーネント790(図94に示される)の第2のポスト902を回転させる。第2のコンポーネント790も同様に、反時計回りに回転することによってカムノッチ796(図94に示される)を回転させる。カムノッチ796(図94に示される)もまた、回転し、かつ第1のコンポーネント776の第1の尖鋭端786(図92に示される)を回転させようとする。しかし、横ストリップ916(図95に示される)は、そのような回転を防止する。これは、スプリング901が、第1のコンポーネント776を内側に、第2のコンポーネント790の方向にバイアスさせながら、第1のコンポーネント776が第2のコンポーネント790から離れるように横に移動する原因となる。カムノッチ796は、次いで第1のコンポーネント776を、第2のコンポーネント790から分離させ、カムノッチ796に乗り上げる。第1のコンポーネント776が、カムノッチ796内を横移動するにつれて、第1のコンポーネント776は、次いで戻り、第2のコンポーネント790と急に接触するが、これはスプリング901の偏りによるものである。第1のコンポーネント776と第2のコンポーネント790との間のこの急な接触は、クリップが発射されるなどの外科手術のイベントの、聞き取れるクリック音を起こす。こう示すことによって、外科医にクリップが発射されたというフィードバックを提供する。様々な構成が可能であり、それらは、本開示の範囲内に存在する。図97は、容器に適用されたクリップ300を例示する。
【0197】
本開示の別の実施形態において、クリップアプライヤ1010は、ロックアウト(lockout)デバイスを含む。ロックアウトデバイスは、器具1010のハンドル部12に位置し、器具1010の1つ以上のサブアセンブリの動作をロックする。ロックアウトデバイスは、トリガ14に加えられた力に関わらず、器具の作動を防止する。この実施形態におけるロックアウトデバイスは、スピンドル128が長手方向に移動することを防止する。従って、ドライババー200(または、そのサブコンポーネント)は、クリップアプライヤ10に何もクリップ300が残っていないときには、ジョー16aおよび16bの間のクリップをかしめることはできない。
【0198】
さらに具体的には、所定数のクリップ300が、クリップアプライヤ1010から発射された後に、クリップアプライヤ1010は、自動的にロックすることによって、クリップのさらなる配置を防止する。このようにして、該ロックアウトは、外科医に感知できるフィードバックを提供し、クリップアプライヤ1010にはクリップ300が残っていないので、組織に適用されるべきクリップ300は残っていないということを知らせる。図98を参照すると、ロックアウトデバイスのいくつかの構成が提示および記述される。図98は、クリップアプライヤ1010が、クリップ搬送チャネル1102(図99)の所定位置に配置されているスプリング1100を有するところを例示する。クリップ搬送チャネル1102と関連付けて示されるが、スプリング1100は、マガジン内などのクリップアプライヤ1010の他のエリアに配置され得、または、クリップアプライヤ1010がクリップ搬送チャネル1102を含まない実施形態では、スプリング1100は、他のエリアに配置され得るか、位置し得る。スプリング1100は、第1の片持ちの自由端1108および対向端1104を有する。端1104は、ロックアウトバー1106を受けるように適合される(図101および図102を参照されたい)。クリップ搬送チャネル1102は、上面図において、図99および図100で再現される。理解され得るように、チャネル1102の遠位側1112(図100)は、アパーチャ1110を有する。
【0199】
図101および図102を参照すると、クリップアプライヤ1010もまた、ロックアウトバー1106を有する。ロックアウトバー1106は、上面図として、図101で再現される。ロックアウトバー1106は、第1の端1114および第2の対向フック端1116を含む。ロックアウトバー1106は、クリップ搬送チャネル1102のシーリングとフロアとの間に詰め込まれるように十分な寸法が取られている。別の実施形態において、該バーは、クリップマガジンのシーリングとフロアとの間に詰め込まれ得る。第2のフック端1116における溝は、クリップアプライヤ1010のクリップフォロア1118(図112)と係合するように適合される。しかし、ロックアウトバー1106は、他の方法、例えばスナップフィット(snap−fit)配置、フリクションフィット(friction−fit)配置、スクリューフィット(screw−fit)配置、ピン配置、または第1の端1114が動き得る他の配置によって、クリップフォロア1118と取り外し可能なように、または永久的に接続され得る。ロックアウトバー1106は、チャネルカバーの底とクリップ搬送チャネル1102のフロア1102’との間に保留される。ロックアウトバー1106は、クリップフォロア1118内に形成された遠位スロット1117において位置する(図112に示される)。スロット1117は、通常は直交するように示されるが、当該分野において公知の任意の同様または異なる形状を有し得ることによって、コンポーネントがクリップフォロア1118において位置することを可能にする。ロックアウトバー1106は、それ自体ではクリップアプライヤ1010をロックアウトしないが、その代わりに、クリップ搬送チャネル1102にほとんどまたは全くクリップ300がないときには、クリップ搬送チャネル1102を介して上方向にのみ移動する。
【0200】
図103は、ロックアウトバー1106を有するロックアウトスプリング1100の部分的に組み立てられた図を例示する。図103および図106を参照すると、クリップフォロア1118は、クリップ搬送チャネル1102内のクリップ300のスタックを遠位的にバイアスさせることによって、クリップ300が、図97に示されるように組織に適用されるために、ジョー1016aとジョー1016bとの間に装填され利用可能となり得る。クリップフォロア1118は、遠位スロット1117を有する(図104)。ロックアウトバー1106は、スロット1117に受けられ、クリップアプライヤ器具1010が発射される度にクリップフォロア1118で遠位的に移動するように適合し、クリップフォロア1118は、遠位的に前進する。
【0201】
図105は、クリップ1010が、フィードバー1120を有することを示す。フィードバー1120は、クリップアプライヤ1010のジョー1016aとジョー1016b(図108)の間に単一のクリップ300を装填するために、発射トリガの各ストロークの間に、遠位的に、次いで隣接するように往復運動する。フィードバー1120は、遠位窓1122を有する。フィードバー1120は、薄い金属材料から作られており、上記の実施形態に関して既に記述されたように、トリップレバー(不図示)とトリップレバースプリング(不図示)によって遠位的に移動される。フィードバー1120は、クリップフォロア1118(図107に示される)およびクリップ搬送チャネル1102(図109に示される)より上に有利に配置される。フィードバー1120の近位端は、1対のフィン1119(図105)を有する。フィン1119は、クリップアプライヤ1010のスピンドル1132の近位窓1134と係合する(図114)。別の実施形態において、フィードバー1120の近位端は、単一のフィンまたはスピンドル1132の窓1134(または特定のスロット)と係合する部材を有し得る。
【0202】
ここで図106を参照すると、クリップ300が、器具1010から発射される度に、クリップフォロア1118は、クリップ搬送チャネル1102に関して遠位的に前進する。図107は、クリップアプライヤ10のコンポーネントの側面図を示し、クリップフォロア1118は、その最も遠位的な位置にあり、クリップアプライヤ1010のカバーは、例示目的のために除去されている。フィードバー1120は、ジョー(不図示)の間にクリップを前進させる遠位ノーズ1128を含む。フィードバー1120はまた、遠位窓1122を有する。クリップフォロア1118は、フィードバー1120の下に位置し、スロット1117を有する。ロックアウトバー1106は、クリップフォロア1118のスロット1117内に位置する。図107に示されるように、最も遠位な位置において、ロックアウトバー1106は、上向きに偏向し、フィードバー1120の窓1122と係合する。
【0203】
図108は、クリップアプライヤ1010のコンポーネントの上面斜視図を示す。クリップアプライヤ1010は、第1のジョー1016a、第2のジョー1016b、カバー1020に接続されたストップ1018およびフィードバー1120を有する。フィードバー1120は、遠位窓1122を有する。フォロア1118が最も遠位な位置にある、すなわちクリップが何も残っていないときに、ロックアウトバー1106は、遠位窓1122に延びる。別の実施形態において、フォロア1118が部分的に最も遠位な位置にある、すなわち、1つ、2つ、または3つほどのクリップほどしか残っていないときに、ロックアウトバー1106は、遠位窓1122に延びる。窓1122の様々な配置および位置が可能であり、それは本開示の範囲内であり、窓1122は、クリップアプライヤ1010内に任意の残数のクリップを有するクリップアプライヤ1010をロックアウトするように、様々な位置に配置され得ることが、認識されるべきである。
【0204】
図109は、図108のカバー1020が除去され、フィードバー1120のノーズ1128を示している、クリップアプライヤ1010のコンポーネントの上面斜視図を示す。示されるように、クリップフォロア1118は、クリップ搬送チャネル1102内にあり、クリップを遠位的に前進させ、示されるように、最終的に遠位位置に到達するまで継続する。図109から分り得るように、クリップ搬送チャネル1102内にクリップが何もない場合またはクリップアプライヤ1010によって発射されるように利用可能なクリップが何もないときには、クリップフォロア1118は、最も遠位な位置にある(例示目的の例として)。この最も遠位な位置に遠位窓1122を有するフィードバー1120は、ロックアウトバー1106と整列する。この最も遠位な位置におけるロックアウトバー1106は、上向きに偏向し、遠位窓1122を介して延びる。
【0205】
図110は、クリップアプライヤ1010のコンポーネントの斜視図を示し、例示目的のために、カバー1020およびフィードバー1120の両方は除去されており、ロックアウトバー1106とクリップフォロア1118との間の関係を示している。図110に示されるように、クリップ搬送チャネル1102は、クリップ搬送チャネル1102の横側にある数のフィンガ1103”を有することによって、クリップ搬送チャネル1102に配列されたクリップ(不図示)を維持する。クリップフォロア1118は、クリップ搬送チャネル1102において配置される。ロックアウトバー1106は、スロット1117において配置されるように示される。ロックアウトバー1106およびスロット1117は、異なる形状および幾何学的形状を有し得、本開示は、あらゆる特定の形状または幾何学的形状に限定されないということが認識されるべきである。フォロア1118およびロックアウトバー1106は、互いが一体化した部材として形成され得ることが、さらに認識されるべきである。様々な構成が、可能であり、本開示の範囲内である。
【0206】
図111を参照すると、クリップフォロア1118の底面図が示される。この図において、クリップフォロア1118は、通常は直交する形状であり、クリップフォロア1118の長手軸Aに沿って配列されるスロット1117を有するように示される。図111から分かり得るように、ロックアウトバー(不図示)の下は、ロックアウトスプリング1100であり、該スプリング1100は、バー1106をバイアスさせる。ロックアウトスプリング1100は、端1108において球根状の部材1108’を有する。スプリング1100の球根状の部材1108’は、クリップ搬送チャネル1102(図100に示される)内のアパーチャ1110に引っ掛からずに通過するのに十分な大きさである。
【0207】
スプリング1100の部材1108’が、クリップ搬送チャネルのフロア1102’の所定の位置、または部材1108’が図100のアパーチャ1110を通過して位置する場所に到達すると、ロックアウトバー1106のフック部分1116は、アパーチャ1110に適合および係合する。
【0208】
図112を参照すると、クリップフォロア1118の断面図を示し、該クリップフォロアは、クリップフォロア1118のスロット1117に配置されるロックアウトバー1106を有する。該図は、図111の線16−16に沿って描かれたものである。クリップフォロア1118のスロット1117は、ロックアウトバー1106のフック部分1116上の溝に配置されたピン1117aを有する。ピン1117aは、ロックアウトバー1106が、遠位動作の間にクリップフォロア1118から分離されることを防止する。
【0209】
ロックアウトバー1106の下に配置されるものは、ロックアウトスプリング1100であり、該スプリングは、図111に示されるクリップ搬送チャネル1102とは反対の方向にロックアウトバー1106を傾ける。最後のクリップが適用されるのに先立って、ロックアウトバー1106は、チャネルカバーの底面とクリップ搬送チャネル1102のフロア1102’との間に保留される。
【0210】
図107は、クリップフォロア1118の最も遠位な位置において、ロックアウトスプリング1100が、ロックアウトバー1106の自由端1114を、クリップ搬送チャネル1102より上に延びている位置に移動および回転させることを示す。従って、ロックアウトバー1106の自由端1114は、上向きに回転し、クリップフォロア1118の遠位端において、クリップ搬送チャネル1102のシーリング1103’を介して離脱することによって、図107に示されるように、フィードバー1120の最も遠位の窓1122と係合する。ロックアウトバー1106のフック部分1116は、回転するように下がり、クリップ搬送チャネル1102のフロアにおけるアパーチャ1110と係合する。
【0211】
フィードバー1120の遠位窓1122は、フィードバー1120(図113)のノーズ1128より上に、直ちに隣接するように示される。図107のロックアウトバー1106の自由端1114は、クリップ搬送チャネル1102の上を通過するように移動し、図107に示されるように、フィードバー1120の遠位窓1122と係合する。
【0212】
スピンドル1132は、図114および図115において示される。近位側で、スピンドル1132の遠位的または近位的な動きに影響することなく、クリップアプライヤ1010の通常の動作の間に、フィードバー1120(図105に示される)のフィン1119が、スピンドル1132の窓1134において単に位置するように、窓1134は、適切な寸法に計られ、配置される。窓1134は、図116において、拡大図で示される。
【0213】
図116に示されるように、窓1134は、通常は直交する形状であり、窓1134の外側の長手面は、クリップアプライヤ1010の通常の動作の間は、他のコンポーネントとは干渉または接触しない。フィードバー1120(図105に示される)は、図116のスピンドル1132に関する薄い部材である。一実施形態において、フィードバー1120は、薄い金属の部材である。別の実施形態において、フィードバー1120は、薄い熱可塑性の部材である。フィードバー1120は、スピンドル1132に関する遠位的および近位的な往復運動に適切である。フィン1119が、スピンドル1132の窓1134の遠位エッジを引っ掛けるときに、フィードバー1120は、スピンドル1132の収縮を防止するが、前進は防止しない。
【0214】
しかし、スピンドル1132は、完全に収縮し得ないことを考慮に入れると、ハンドル部分(図117)の爪1146は、定位置またはクリップアプライヤ1010のハンドル部分12におけるラック1140と関連する最初の位置には戻り得ない。その代わりに、図118に示されるように、爪1146は、ラック1140と関連する中間位置に留まる。トリガ(不図示)が絞られる(squeeze)ときには、爪1146は、ラック1140から離れるようには十分に回転し得ず、または時計回りに回転して爪1146を定位置(または、図117に示されるように、器具の次の発射のための静止位置)にリセットするようには移動し得ない。従って、爪1146およびラック1136は、絞られる状態からトリガ14をロックアウトし、スピンドル1132は、ドライババーと係合するようには遠位的に移動し得ず(図26および図27)、その結果として、クリップアプライヤ1010は、ジョー1016aおよび1016bを閉じることはできない。外科医は、トリガ14から強く感知できるフィードバック、およびトリガ14は、もはやハンドル12の方向に与圧され得ない抵抗を感じ、これによってクリップアプライヤ1010は、新たな器具を配置されること/新たな器具と置換されることを必要とする信号を送る。
【0215】
ここで図119に移ると、第2のロックアウトメカニズム1150に対するシャーピン1148の斜視図が示される。シャーピン1148は、第1のネック部分1154および第2のネック部分1156を定義する3部分の本体1152を有する、通常は円筒形の部材である。第1のネック部分1154および第2のネック部分1156はそれぞれ、本体1152よりも狭い幅を有し、リンケージ1160と係合するように構成される。さらに具体的には、トリガ1156がリンケージ1160と接続されており、該リンケージは、次いでピン1148の第1のネック部分1154および第2のネック部分1156と係合する。
【0216】
ここで図120を参照すると、ラック1140および爪1146を有し、第2のロックアウトメカニズム1150を用いて上述されたようにスピンドル1132をロックアウトしているクリップアプライヤ1010の側面断面図が示される。示されるように、トリガ1156は、スピンドル1132を遠位的に前進させることを防止するが、これは、ラック1140および爪1146が、上述されたように、スピンドル1132を近位方向に収縮させないからである。しかし、この実施形態において、器具1010は、第2のロックアウト1150を有することによって、外科医がトリガ1156およびハンドル1158に力を加えすぎることによって、ラック1140と爪1146との間の係合を乗り越えるか、または押しのけ、スピンドル1132を遠位的に移動させることを防止する。
【0217】
ここで図121に移ると、力F1がトリガ1156に加わる場合には、トリガ1156は、ハンドル1158の方向に移動し、リンク1160を前進させる。リンク1160は、シャーピン1148を遠位的に前進させることによって、スピンドルリンク1132aによってスピンドル1132を遠位的に前進させる。爪1146とラック1140との間の係合は、上述されたように、スピンドル1132が遠位的に移動することを防止する。しかし、ここで図122に移ると、力F2(力F1よりも大きい)がトリガ1156に加えられることによって、潜在的にラック1140と爪1146との間の係合を押しのけ得るように、さらにトリガ1156に与圧する場合には、力F2は、シャーピン1148を破壊する。従って、トリガ1156とスピンドル1132との間の接続は、破壊され、リンク1160は、スピンドルリンク1132aを遠位的に前進させ得ない。故に、第2のロックアウトが達成される。
【0218】
理解されるべきは、先の記述は、本開示の単なる例示的なものである。様々な代案および修正が、本開示から逸脱することなく当業者によって考案され得る。従って、本開示は、そのような全ての代案、修正および変化を包含するように意図される。添付の図面を参照しながら記述された実施形態は、本開示の特定の実施例を論証するためだけに提示されている。上述されたおよび/または添付の特許請求の範囲に記載された、実質なく異なる他の要素、ステップ、方法および技術もまた、本開示の範囲内にあることが意図される。
【符号の説明】
【0219】
10 クリップアプライヤ
12 ハンドルアセンブリ
14 管状部材
16 ジョー
18 トリガ
20 ノブ
56 ロックアウトメカニズム
74 ピン
100 LCDカウンタコンタクトプレート
128 スピンドル
200 ドライババー
【特許請求の範囲】
【請求項1】
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させるように構成されており、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と
を備えており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【請求項2】
前記装置は、内視鏡の外科的な用途のために構成されている、請求項1に記載の装置。
【請求項3】
前記装置は、肥満学上の手術のために構成された本体を有する、請求項2に記載の装置。
【請求項4】
前記本体は、少なくとも30センチの長さを有する、請求項1に記載の装置。
【請求項5】
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させるように構成されており、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、爪と、
k)第2のロックアウトデバイスであって、該第2のロックアウトデバイスは、該ハンドル部分と該アクチュエータとの間の接続を破壊することによって、所定の力が該ハンドル部分に加えられるときに、該ハンドル部分の作動に応答する該アクチュエータの長手方向の運動を防止するように構成されており、該所定の力は、該爪から該ラチェット歯を押しのけるために必要な力よりも小さい、第2のロックアウトデバイスと
を備えている、装置。
【請求項6】
前記第2のロックアウトデバイスは、前記アクチュエータを前記ハンドルに接続するリンクと、該リンクを該アクチュエータに接続するシャーピンとを含む、請求項5に記載の装置。
【請求項7】
前記シャーピンは、概ね円筒形であり、本体を有し、該本体は、第1の直径と、該第1の直径よりも小さい第2の直径を有する第2の区分とを有し、前記所定の力の適用で、該シャーピンは、第2の直径に沿って壊れる、請求項6に記載の装置。
【請求項1】
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させるように構成されており、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されている、爪と
を備えており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、装置。
【請求項2】
前記装置は、内視鏡の外科的な用途のために構成されている、請求項1に記載の装置。
【請求項3】
前記装置は、肥満学上の手術のために構成された本体を有する、請求項2に記載の装置。
【請求項4】
前記本体は、少なくとも30センチの長さを有する、請求項1に記載の装置。
【請求項5】
体組織に対する外科用クリップの適用のための装置であって、該装置は、
a)ハンドル部分と、
b)該ハンドル部分から遠位的に延びており、長手軸を定義する本体と、
c)該本体内に配置された複数の外科用クリップと、
d)該本体の遠位端に隣接するように取り付けられたジョーアセンブリであって、該ジョーアセンブリは、間隔を開いた位置と近接した位置との間を移動可能な、第1のジョー部および第2のジョー部を含む、ジョーアセンブリと、
e)フィードバーであって、該フィードバーは、個別に、遠位的に外科用クリップを該ジョーアセンブリに前進させるように構成されており、一方で、該ジョー部は、間隔を開いた位置にある、フィードバーと、
f)該複数のクリップに近位的に配置され、遠位的な方法で該複数のクリップを傾けるように構成されたクリッププッシャと、
g)該本体内に少なくとも部分的に配置され、該ハンドル部分の作動に応答して長手方向に移動可能であるアクチュエータと、
h)該第1および第2のジョー部に隣接して位置付けられることによって、近づいた位置に該ジョー部を移動させるジョークロージャ部材と、
i)該アクチュエータに接続された複数のラチェット歯を有するラックと、
j)該ラチェット歯を係合させるように構成された少なくとも1つの歯を有する爪であって、該爪は、ハンドル部分においてバイアスされており、該アクチュエータが長手方向に移動されると、該複数のラチェット歯は、該爪の上を越えさせられ、該爪は、該装置の完全な作動の前に該アクチュエータが偶然的に戻ってくることを防止するように構成されており、
クリップが該装置から放たれる度に、該クリッププッシャは、規則的に増加するように遠位的に移動し、該クリッププッシャが、クリップ搬送チャネルにおける所定の遠位点に到達するときに、該フィードバーは、第2の位置に偏向され、該第2の位置における該フィードバーは、該アクチュエータと係合する部分を有し、該第2の偏向された位置における該フィードバーは、収縮を防止するが、該アクチュエータの前進は防止せず、それによって、該爪を該ラックのラチェット歯と係合されるように操作し、該爪および該ラックは、該アクチュエータが、長手方向に移動することを防止することによって、該アクチュエータをロックする、爪と、
k)第2のロックアウトデバイスであって、該第2のロックアウトデバイスは、該ハンドル部分と該アクチュエータとの間の接続を破壊することによって、所定の力が該ハンドル部分に加えられるときに、該ハンドル部分の作動に応答する該アクチュエータの長手方向の運動を防止するように構成されており、該所定の力は、該爪から該ラチェット歯を押しのけるために必要な力よりも小さい、第2のロックアウトデバイスと
を備えている、装置。
【請求項6】
前記第2のロックアウトデバイスは、前記アクチュエータを前記ハンドルに接続するリンクと、該リンクを該アクチュエータに接続するシャーピンとを含む、請求項5に記載の装置。
【請求項7】
前記シャーピンは、概ね円筒形であり、本体を有し、該本体は、第1の直径と、該第1の直径よりも小さい第2の直径を有する第2の区分とを有し、前記所定の力の適用で、該シャーピンは、第2の直径に沿って壊れる、請求項6に記載の装置。
【図1】


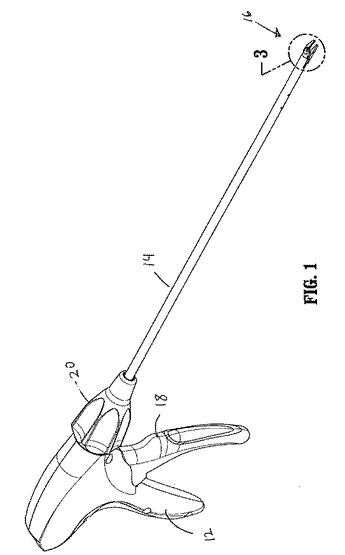
【図2】
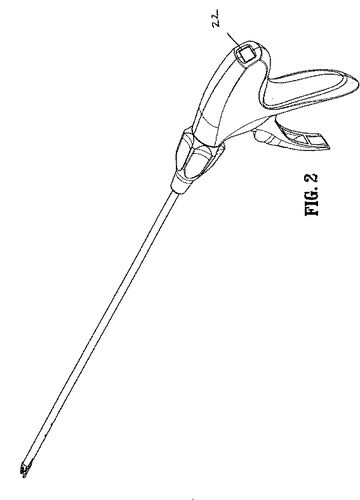
【図2A】
【図3】
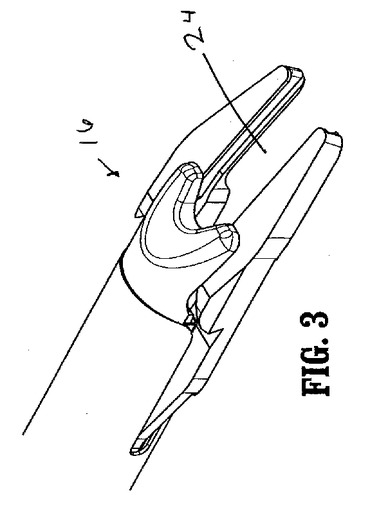
【図4】
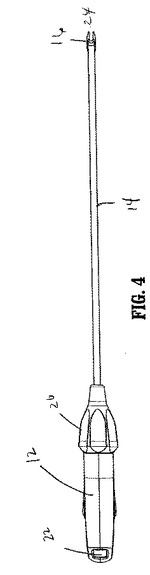
【図5】
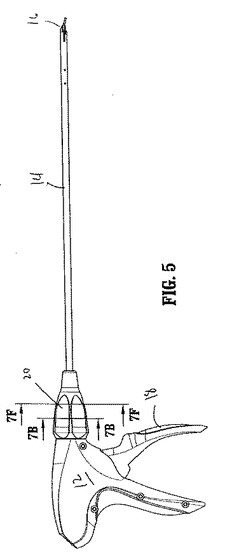
【図6A】
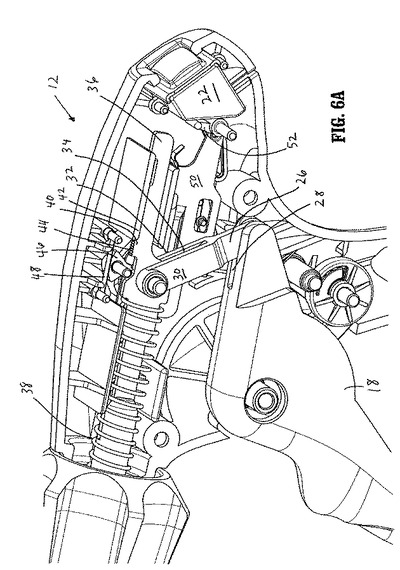
【図6B】
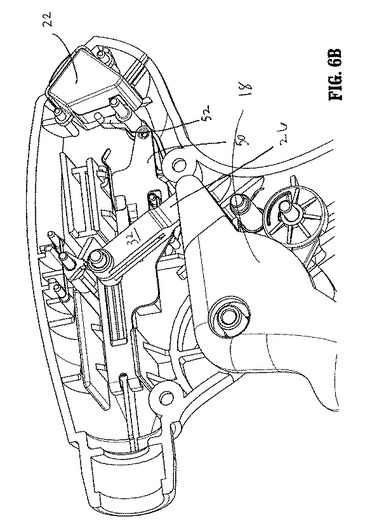
【図6C】
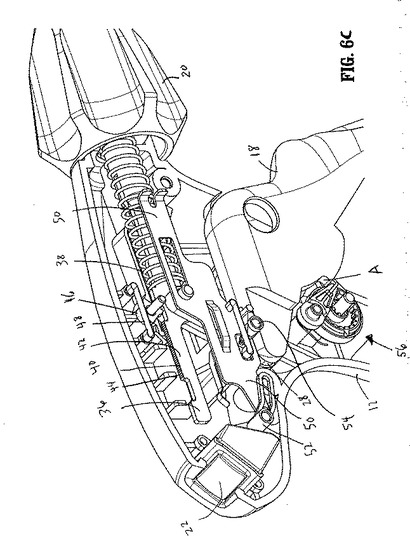
【図7】
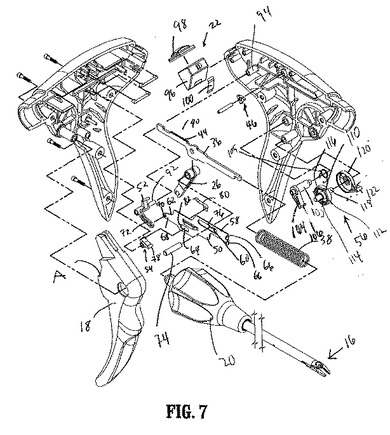
【図7A】
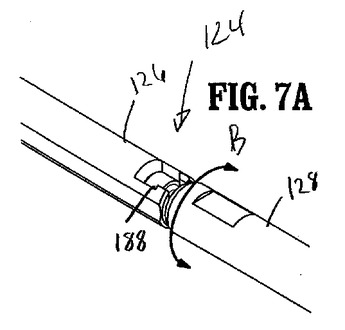
【図7B】
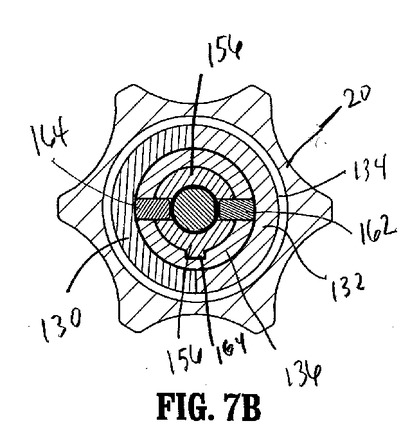
【図7C】
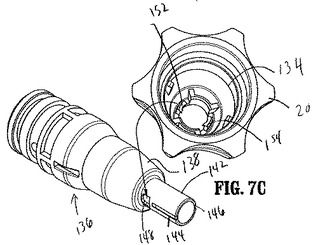
【図7D】
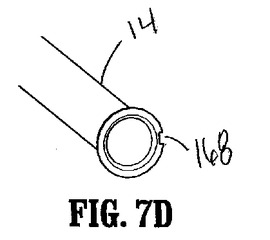
【図7E】
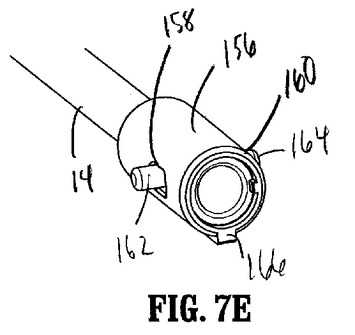
【図7F】
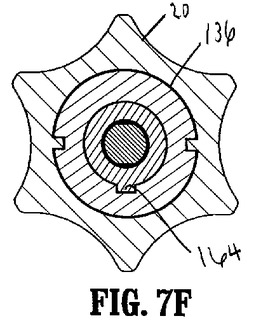
【図7G】
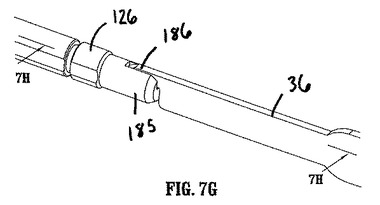
【図7H】
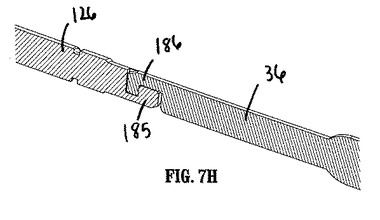
【図8】
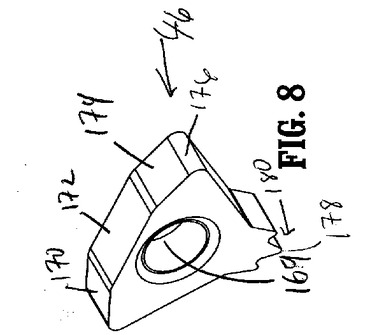
【図9】
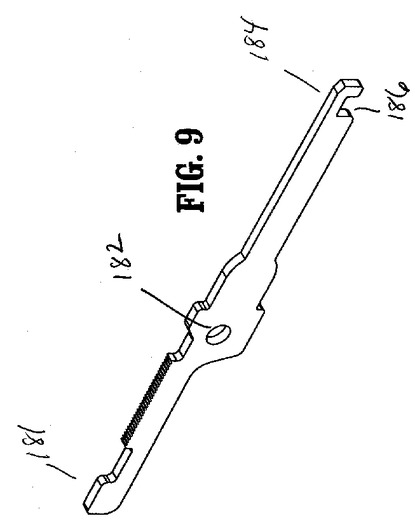
【図9A】
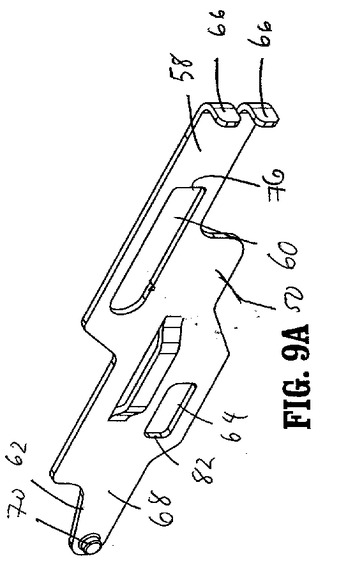
【図9B】
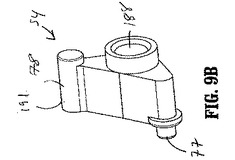
【図9C】
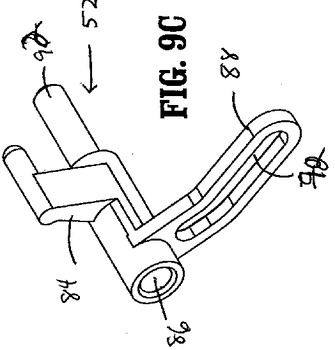
【図9D】
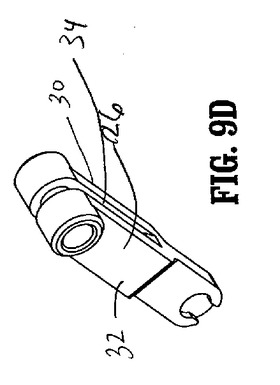
【図10】
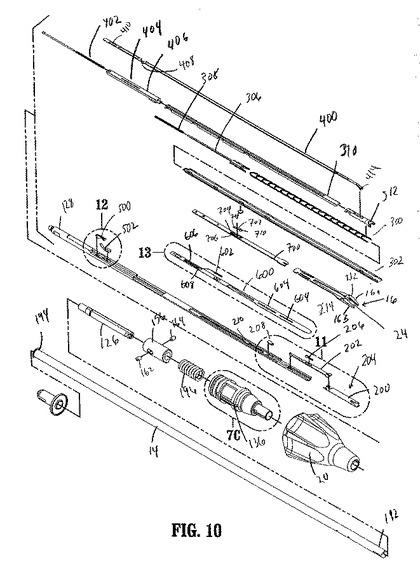
【図10A】
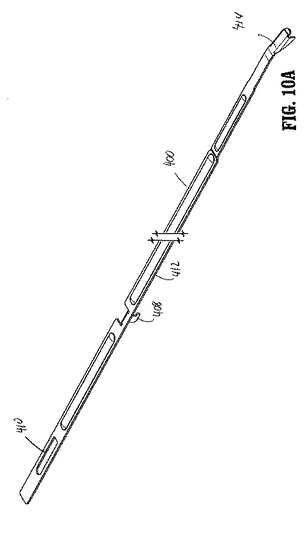
【図10B】
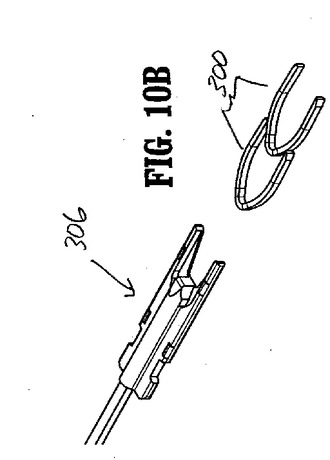
【図10C】
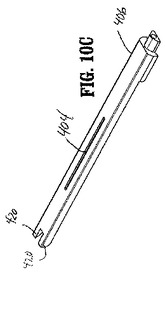
【図10D】
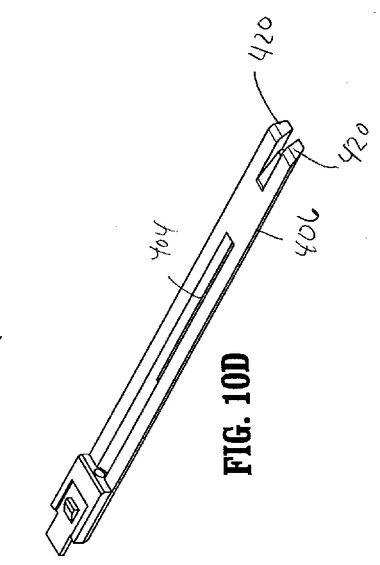
【図10E】
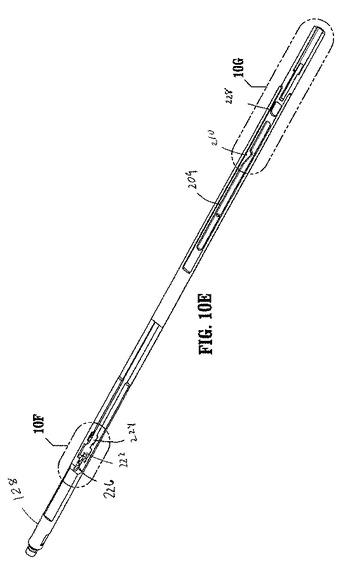
【図10F】
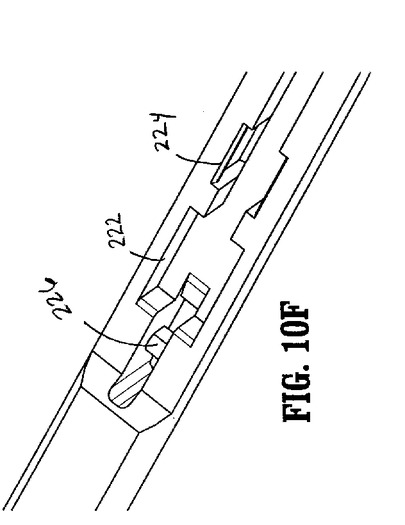
【図10G】
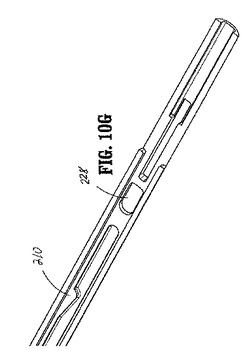
【図11】
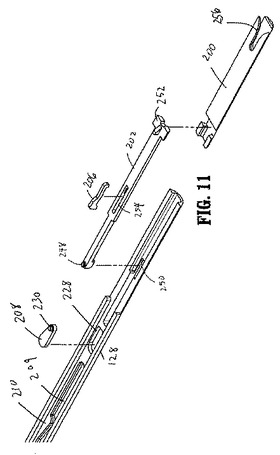
【図12】
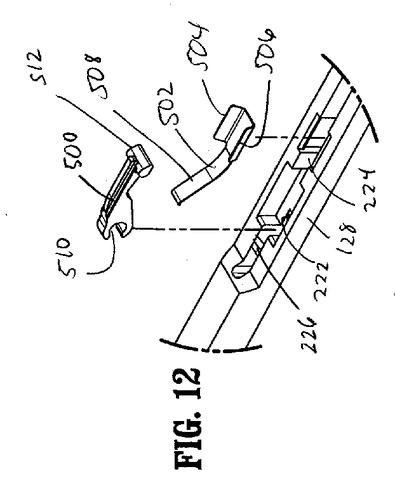
【図13】
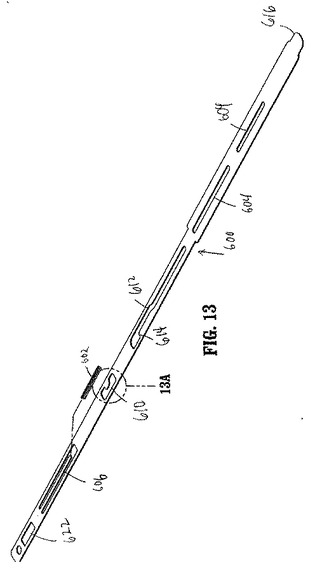
【図13A】
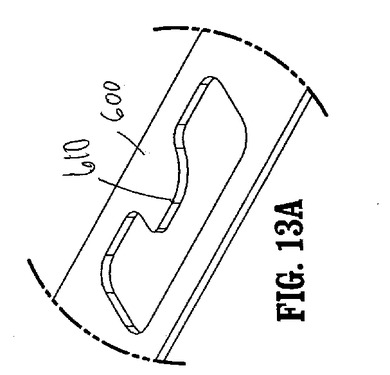
【図14】
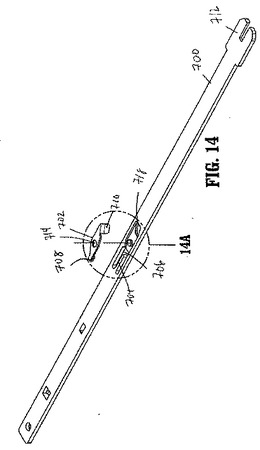
【図14A】
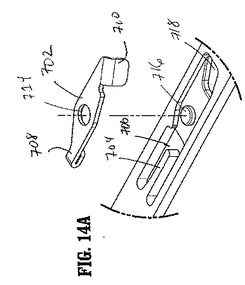
【図15】
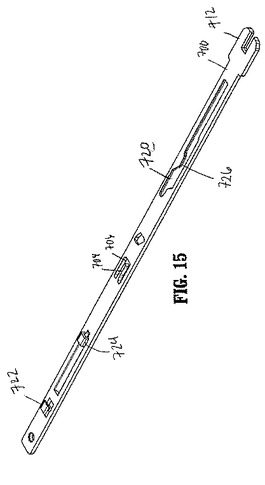
【図16】
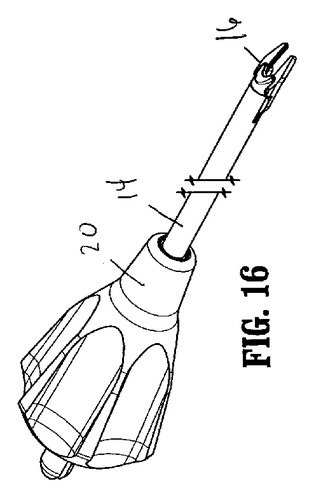
【図17】
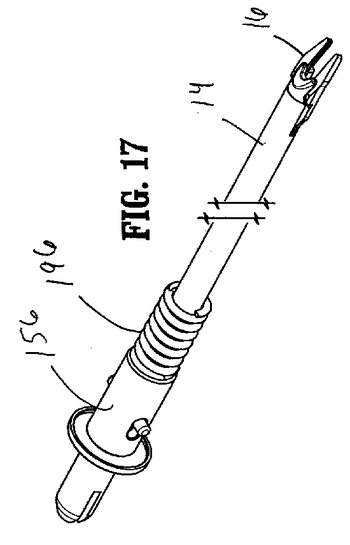
【図18】
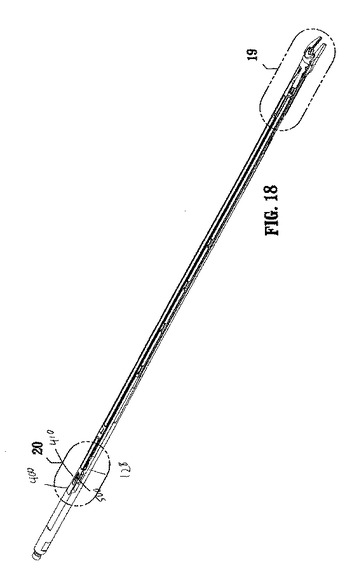
【図19】
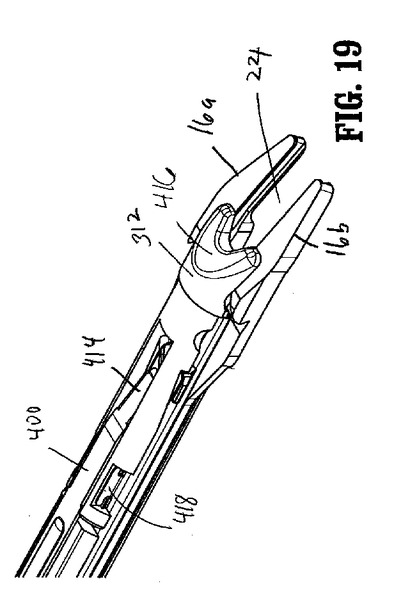
【図20】
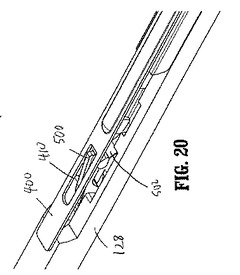
【図21】
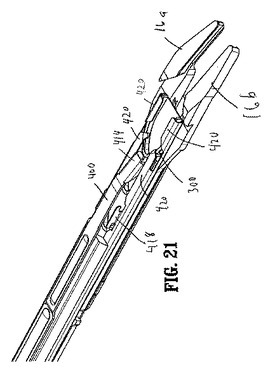
【図22】
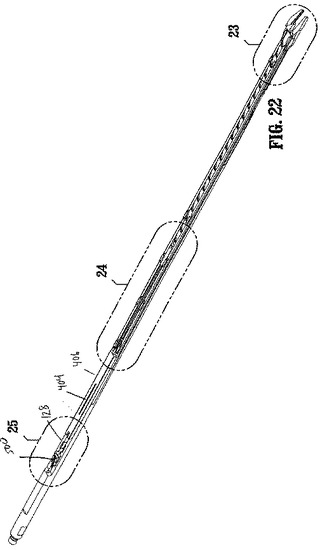
【図23】
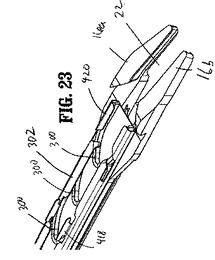
【図24】
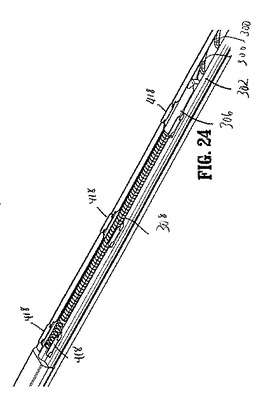
【図25】
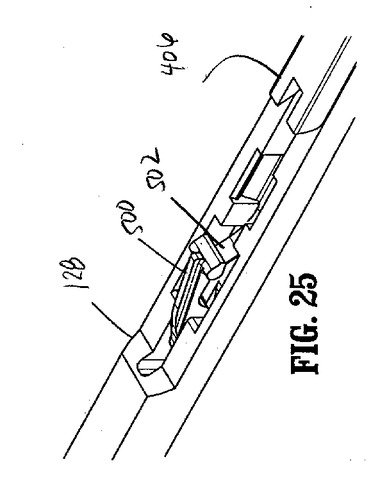
【図26】
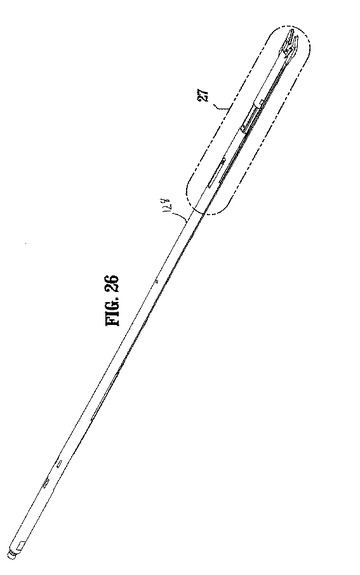
【図27】
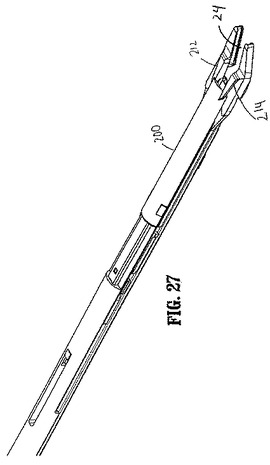
【図28】
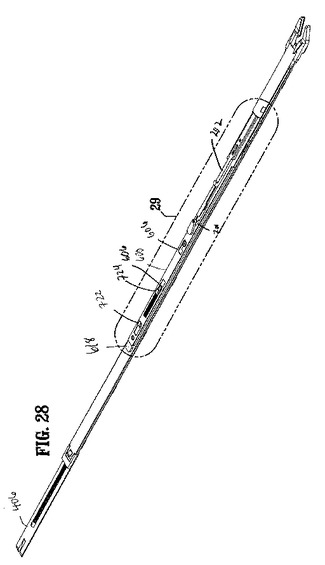
【図29】
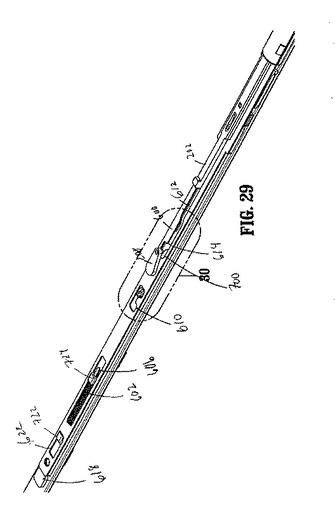
【図30】
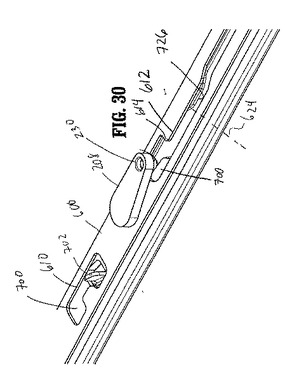
【図31】
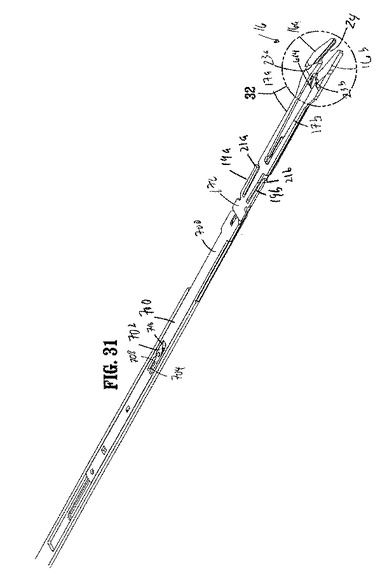
【図32】
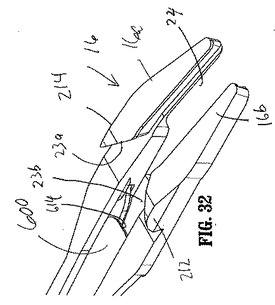
【図33】
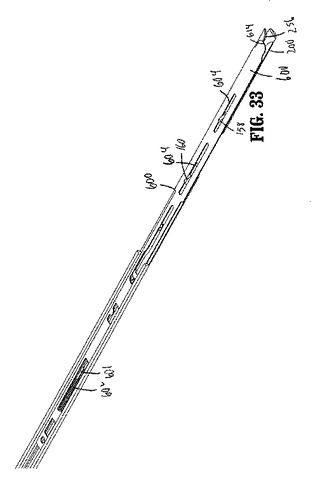
【図34】
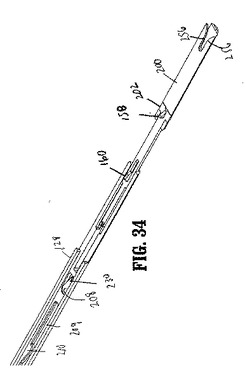
【図35】
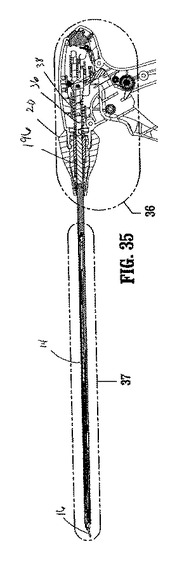
【図36】
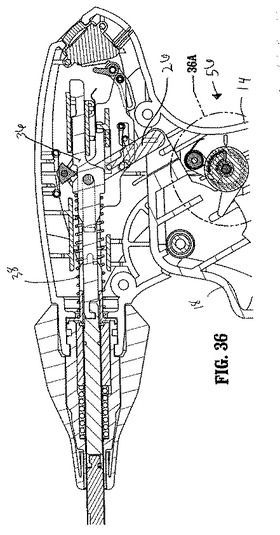
【図36A】
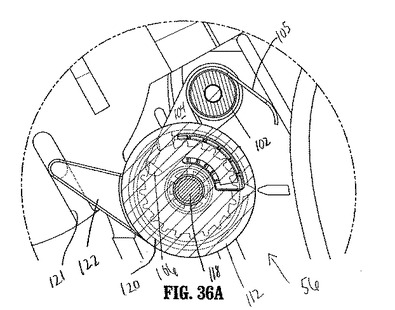
【図36B】
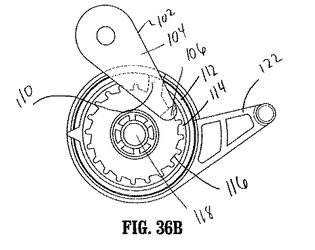
【図36C】
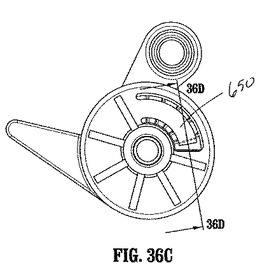
【図36D】
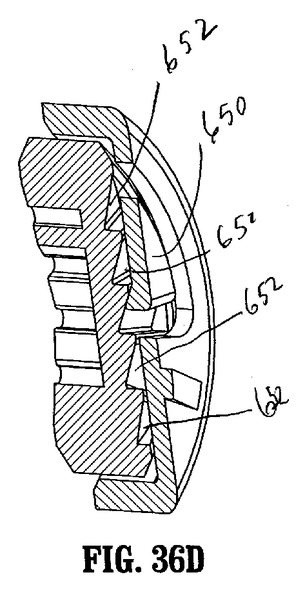
【図36E】
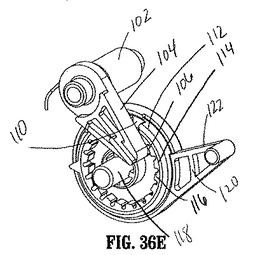
【図36F】
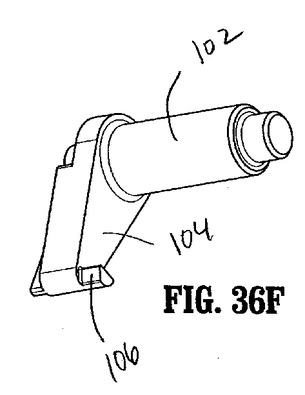
【図36G】
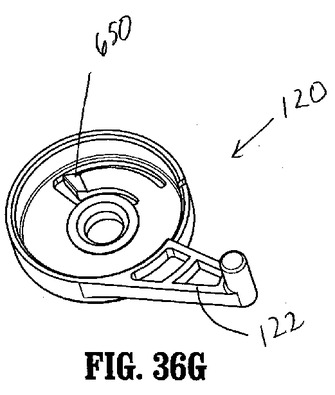
【図36H】
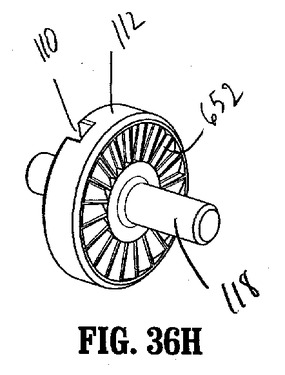
【図36I】
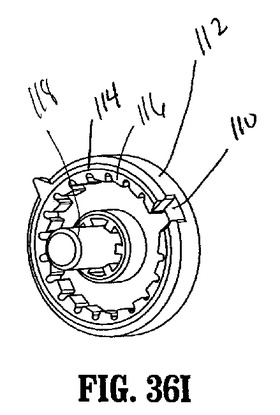
【図37】
【図38】
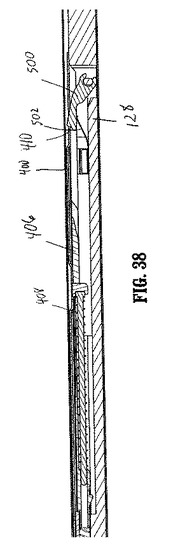
【図39】
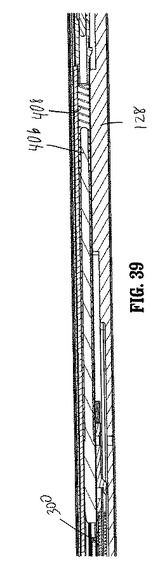
【図40】
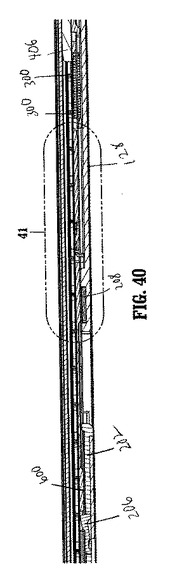
【図41】
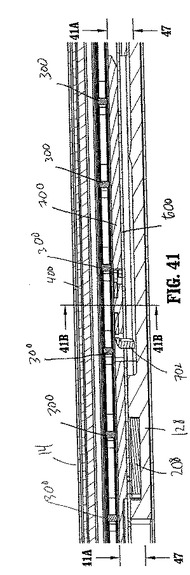
【図41A】
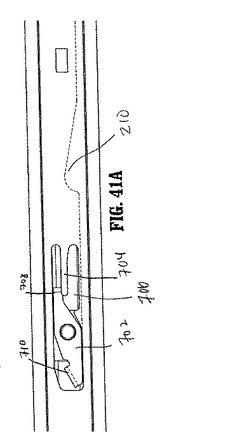
【図41B】
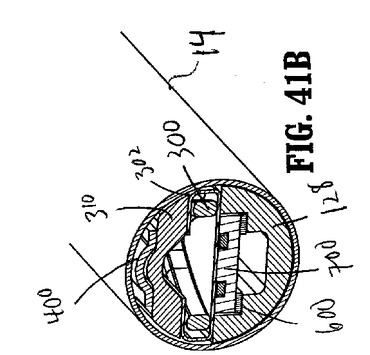
【図42】
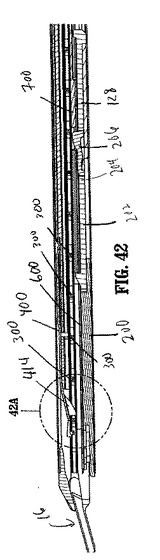
【図42A】
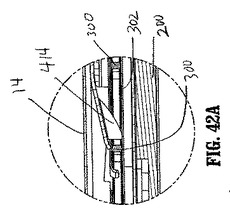
【図43】
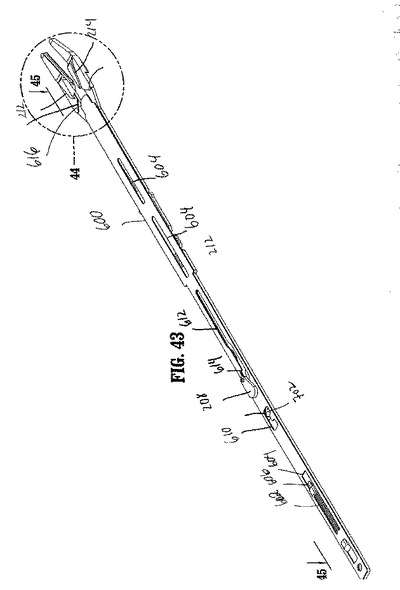
【図44】
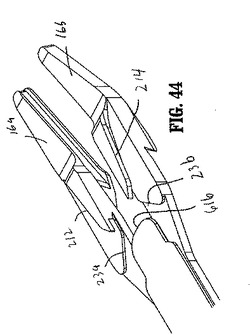
【図45】
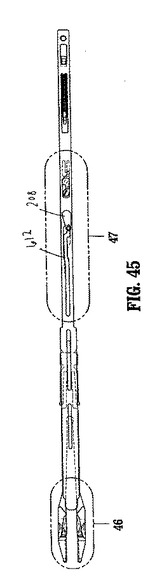
【図46】
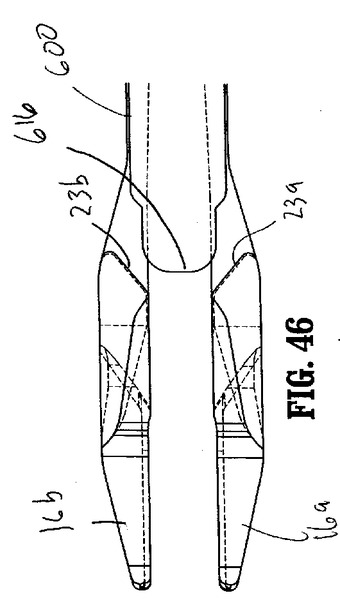
【図47】
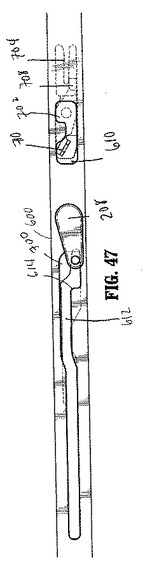
【図48】
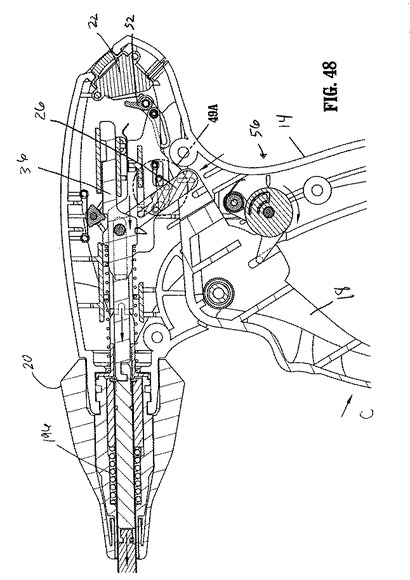
【図49】
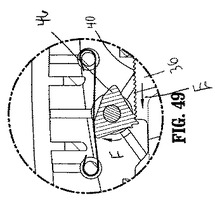
【図49A】
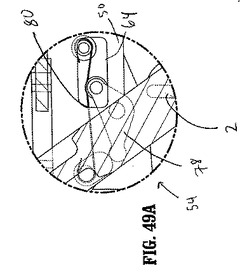
【図50】
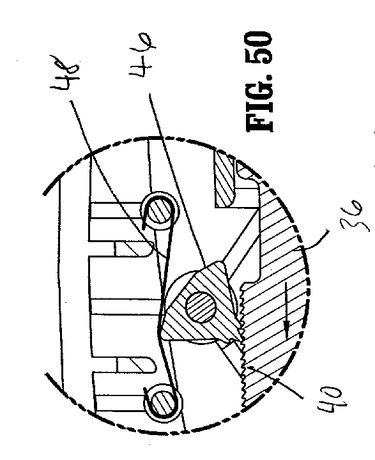
【図50A】
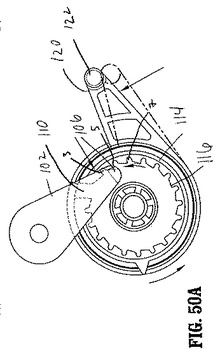
【図51】
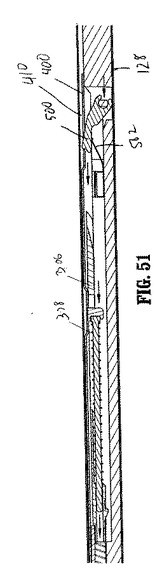
【図52】
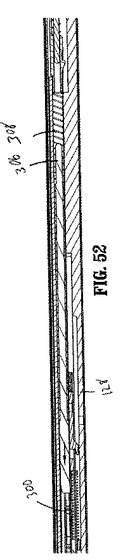
【図53】
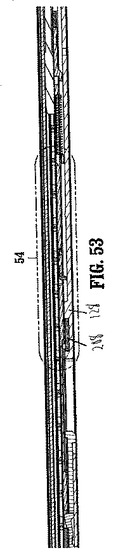
【図54】
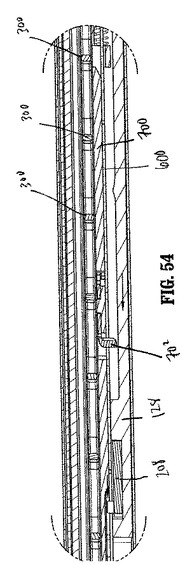
【図55】
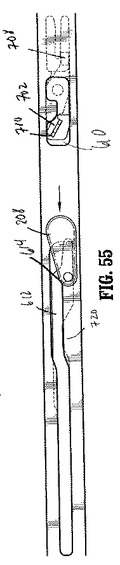
【図56】
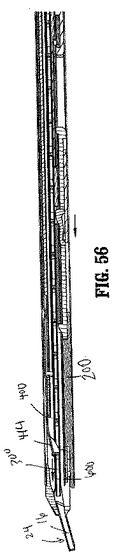
【図57】
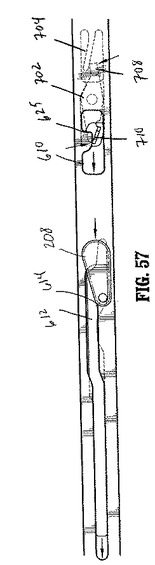
【図58】
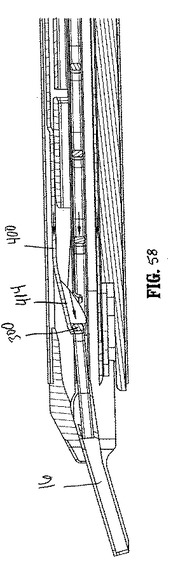
【図59】
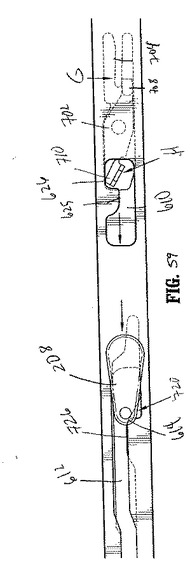
【図60】
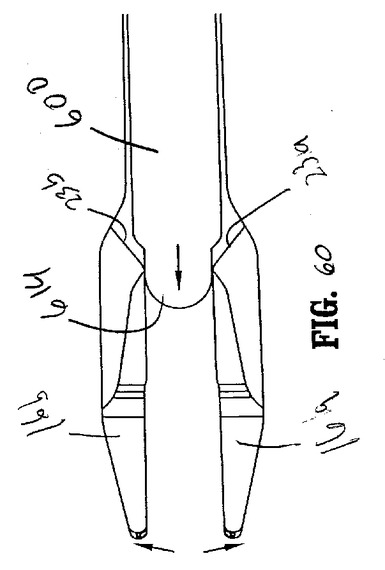
【図61】
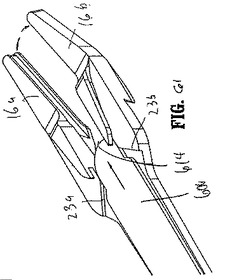
【図62】
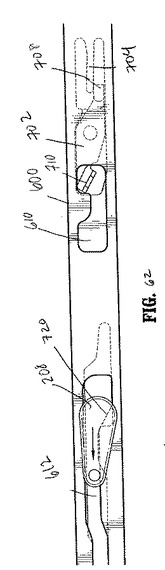
【図63】
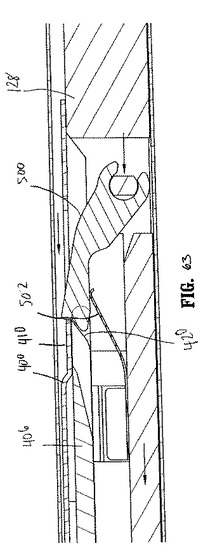
【図64】
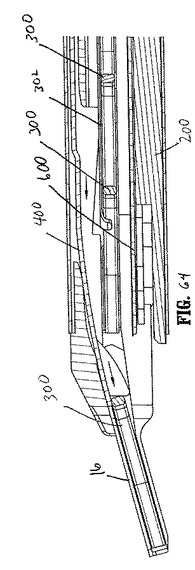
【図65】
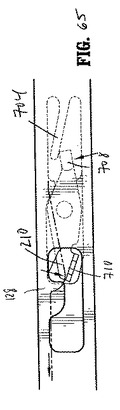
【図65A】
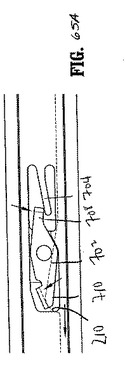
【図66】
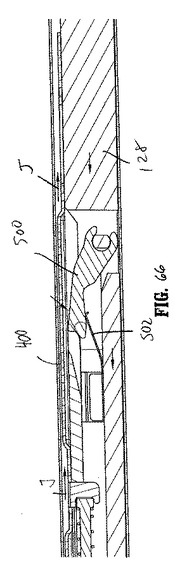
【図67】
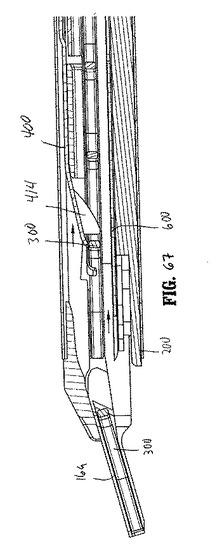
【図67A】
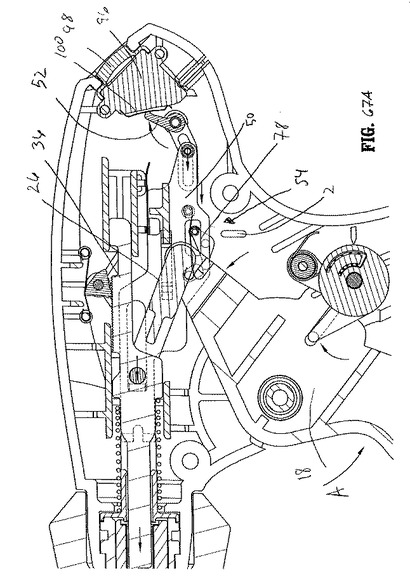
【図68】
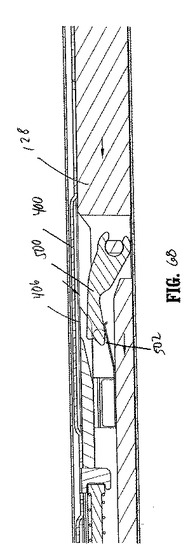
【図69】
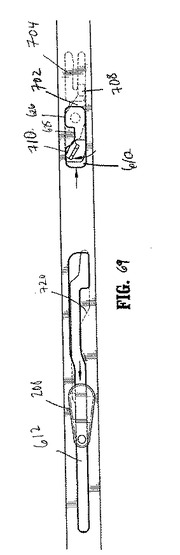
【図70】
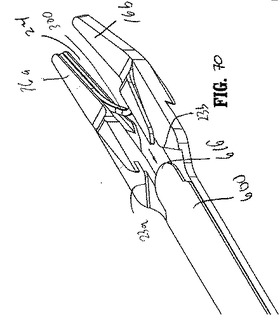
【図71】
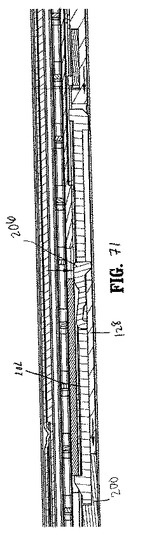
【図71A】
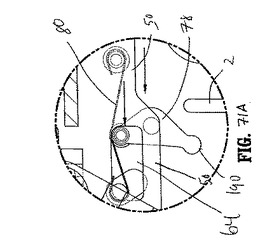
【図72】
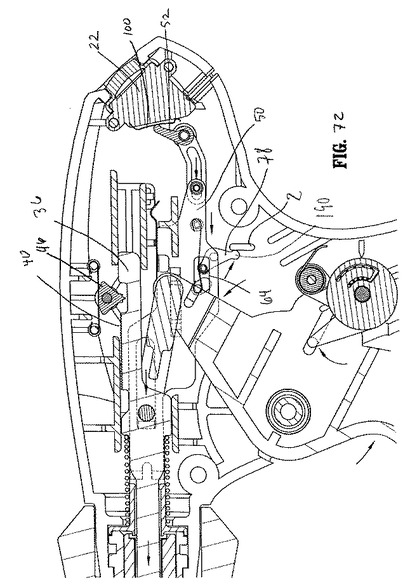
【図73】
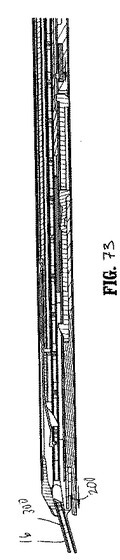
【図74】
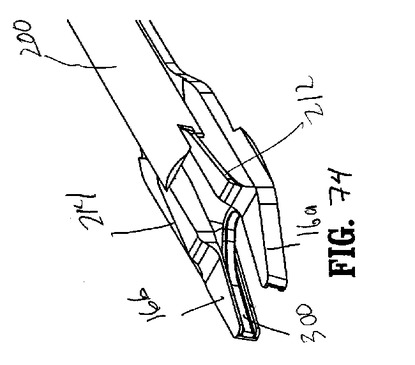
【図75】
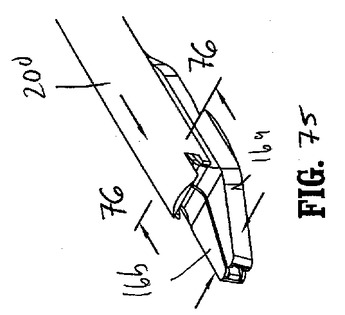
【図76】
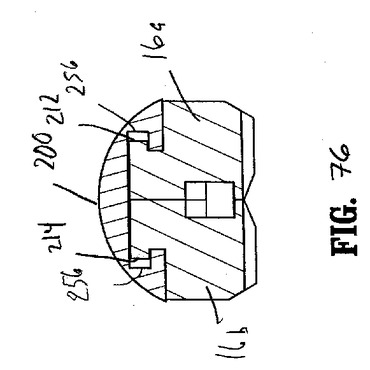
【図77】
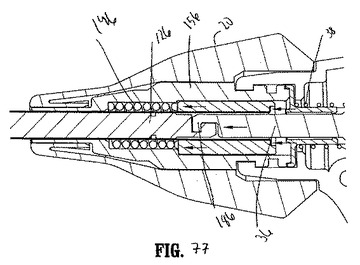
【図78】
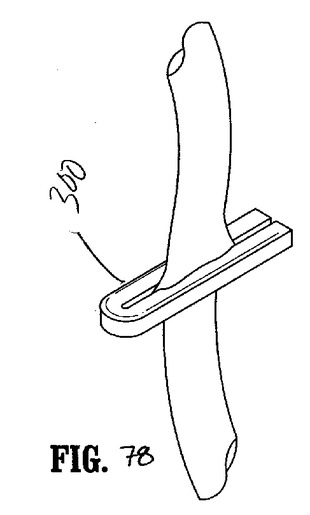
【図79】
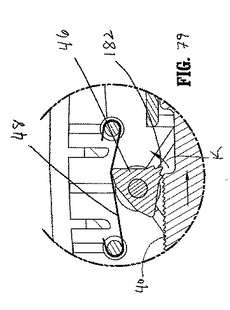
【図80】
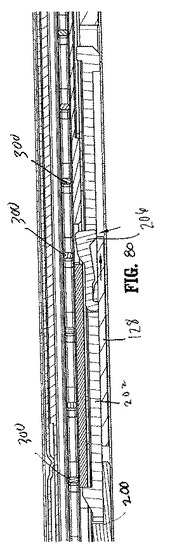
【図81】
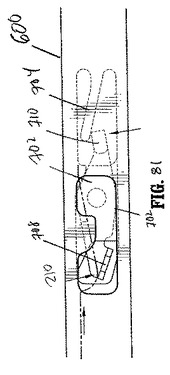
【図82】
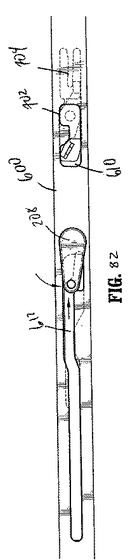
【図83】
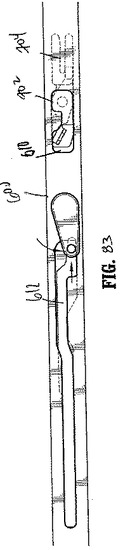
【図84】
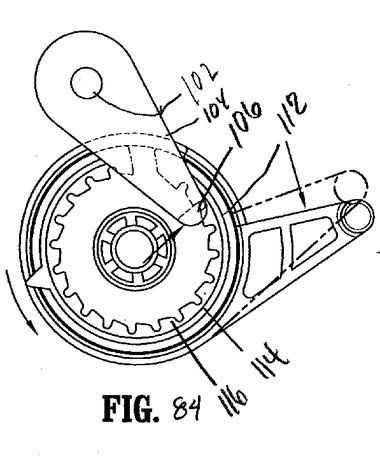
【図85】
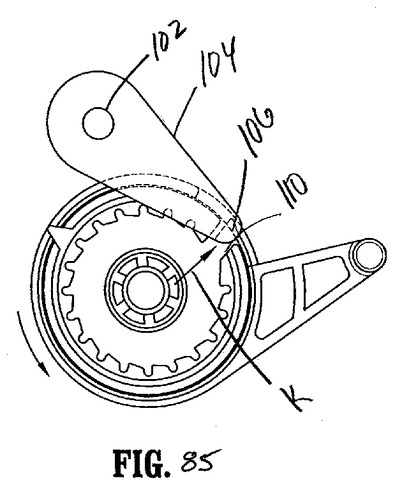
【図86】
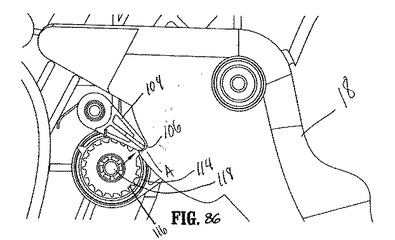
【図87】
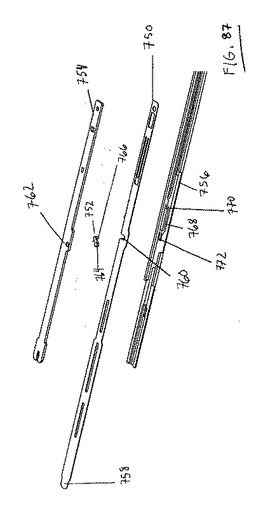
【図88A】

【図88B】

【図88C】
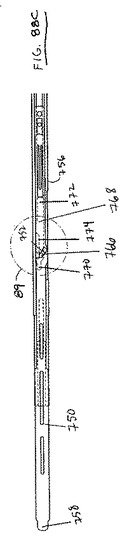
【図89】
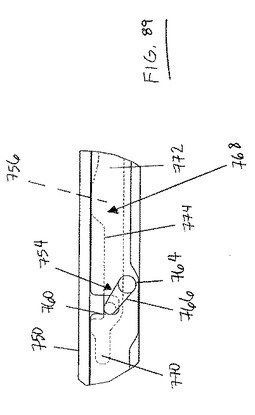
【図90】
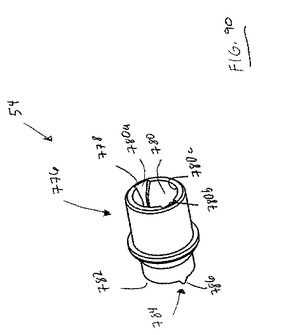
【図91】
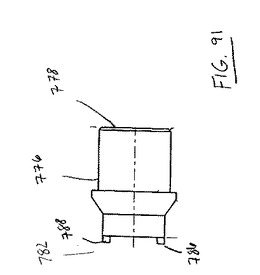
【図92】
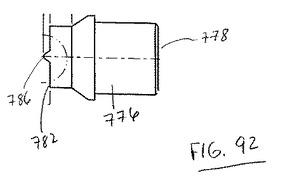
【図93】
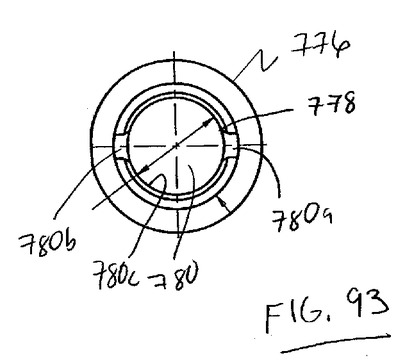
【図94】
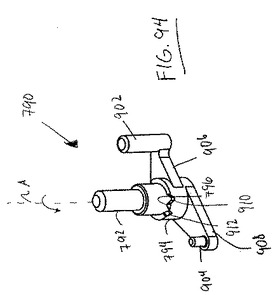
【図95】
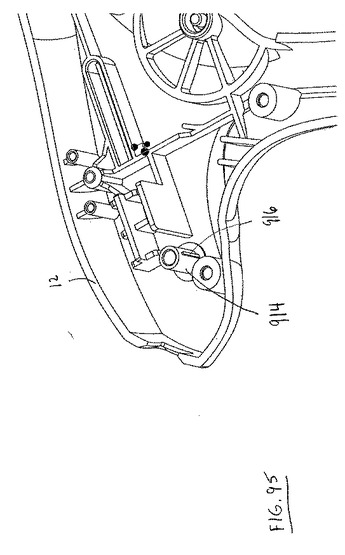
【図96】
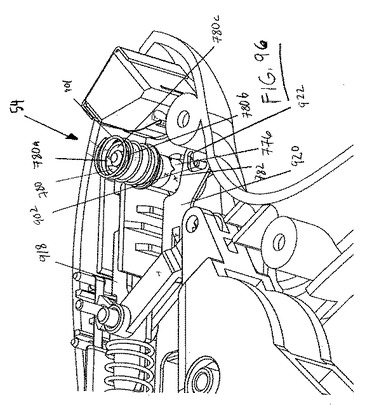
【図97】
【図98】
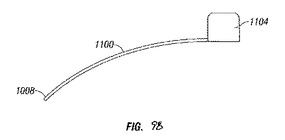
【図99】

【図100】
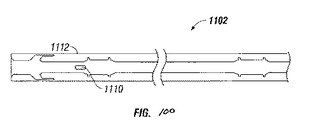
【図101】
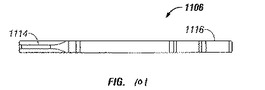
【図102】
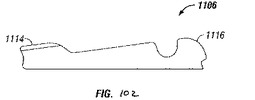
【図102A】
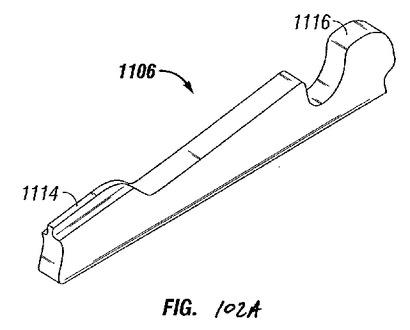
【図103】
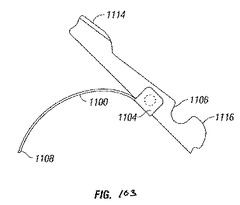
【図104】
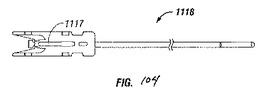
【図105】
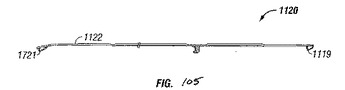
【図106】
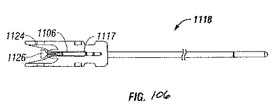
【図107】
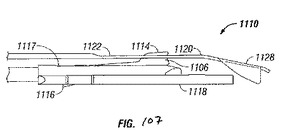
【図108】
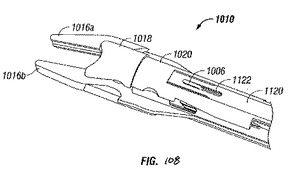
【図109】
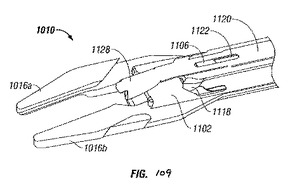
【図110】
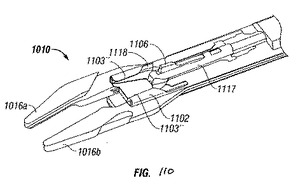
【図111】
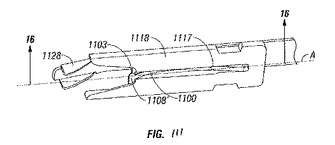
【図112】
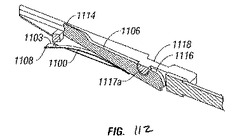
【図113】
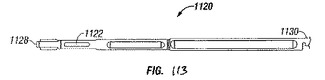
【図114】

【図114A】
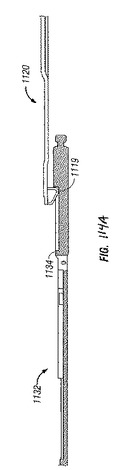
【図115】
【図116】
【図117】
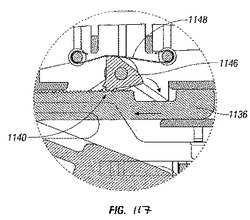
【図118】
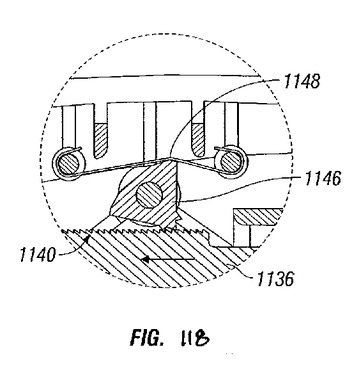
【図119】
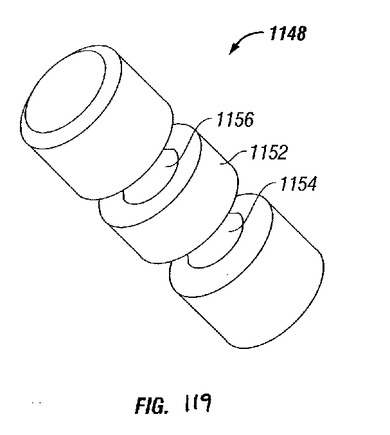
【図120】
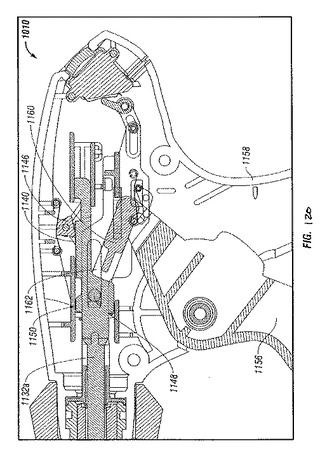
【図121】
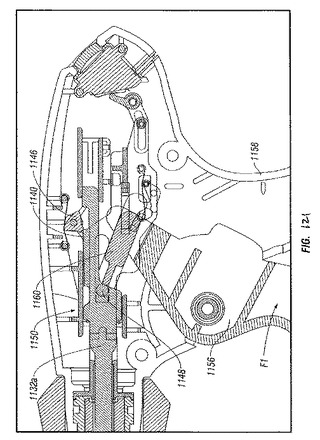
【図122】
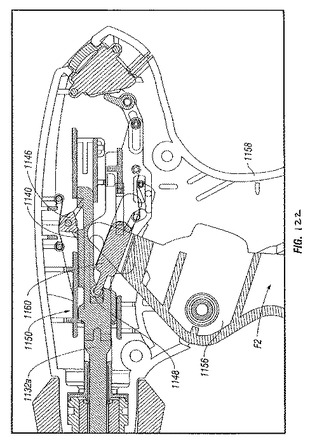
【図2】
【図2A】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7】
【図7A】
【図7B】
【図7C】
【図7D】
【図7E】
【図7F】
【図7G】
【図7H】
【図8】
【図9】
【図9A】
【図9B】
【図9C】
【図9D】
【図10】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図11】
【図12】
【図13】
【図13A】
【図14】
【図14A】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図36A】
【図36B】
【図36C】
【図36D】
【図36E】
【図36F】
【図36G】
【図36H】
【図36I】
【図37】
【図38】
【図39】
【図40】
【図41】
【図41A】
【図41B】
【図42】
【図42A】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図49A】
【図50】
【図50A】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図65A】
【図66】
【図67】
【図67A】
【図68】
【図69】
【図70】
【図71】
【図71A】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図81】
【図82】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88A】
【図88B】
【図88C】
【図89】
【図90】
【図91】
【図92】
【図93】
【図94】
【図95】
【図96】
【図97】
【図98】
【図99】
【図100】
【図101】
【図102】
【図102A】
【図103】
【図104】
【図105】
【図106】
【図107】
【図108】
【図109】
【図110】
【図111】
【図112】
【図113】
【図114】
【図114A】
【図115】
【図116】
【図117】
【図118】
【図119】
【図120】
【図121】
【図122】
【公開番号】特開2013−17894(P2013−17894A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−241660(P2012−241660)
【出願日】平成24年11月1日(2012.11.1)
【分割の表示】特願2007−259052(P2007−259052)の分割
【原出願日】平成19年10月2日(2007.10.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成24年11月1日(2012.11.1)
【分割の表示】特願2007−259052(P2007−259052)の分割
【原出願日】平成19年10月2日(2007.10.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]