
内視鏡装置、内視鏡装置の制御方法、およびプログラム
【課題】計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供する。
【解決手段】先端部21は、光学系によって領域S1に結像される2つの像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部25と、領域S1に結像された第1の像に基づく第1画像および領域S1に結像された第2の像に基づく第2画像を生成する撮像素子22とを有する。制御部30は、撮像素子22に複数枚の第1画像を生成させると共に、複数枚の第1画像に基づいて、ぶれの有無を判定した後、撮像素子22に第2画像を生成させる。続いて、制御部30は、撮像素子22に第1画像を生成させると共に、第2画像の生成の前および後に生成された第1画像に基づいて、ぶれの有無を判定する。制御部30は、2回のぶれの有無の判定で、ぶれがないと判定した場合に、計測部31に計測を行わせる。
【解決手段】先端部21は、光学系によって領域S1に結像される2つの像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部25と、領域S1に結像された第1の像に基づく第1画像および領域S1に結像された第2の像に基づく第2画像を生成する撮像素子22とを有する。制御部30は、撮像素子22に複数枚の第1画像を生成させると共に、複数枚の第1画像に基づいて、ぶれの有無を判定した後、撮像素子22に第2画像を生成させる。続いて、制御部30は、撮像素子22に第1画像を生成させると共に、第2画像の生成の前および後に生成された第1画像に基づいて、ぶれの有無を判定する。制御部30は、2回のぶれの有無の判定で、ぶれがないと判定した場合に、計測部31に計測を行わせる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、計測機能を有する内視鏡装置およびその制御方法に関する。また、本発明は、内視鏡装置における計測機能をコンピュータ上で実現するためのプログラムにも関する。
【背景技術】
【0002】
近年、ボイラー、タービン、エンジン、化学プラントなどの検査において、内部の傷や腐食を観察するのに工業用内視鏡が広く用いられている。特許文献1に示されるように、工業用内視鏡の具体例として、内視鏡の先端に2個の光学系を設け、三角測量の原理を利用したステレオ計測により3次元計測を実現した計測内視鏡装置がある。このような計測内視鏡装置を用いて、検査で内部に傷などの不具合箇所が発見された際に傷の大きさ等を計測することで、分解・修理の必要性を判断することができる。
【0003】
また、特許文献2で示される内視鏡装置は、2つの異なる光路(第1光路と第2光路とよぶ)を通った光が形成する被写体の2つの像を撮像素子の共通の領域に結像させる光学系と、2つの光路のうちのいずれか一方の光路を通った光のみが形成する被写体の像を撮像するように光路を切り替える光路切り替え手段とを備えている。
【0004】
この内視鏡装置を用いて被写体を観察する場合、第1光路を通った光が形成する被写体の第1の像の撮像により画像が生成され、使用者はその画像を観察する。使用者が、観察中に発見した傷の大きさ等を計測する際は、次のように画像の撮像と計測が行われる。最初に、第1光路を通った光が形成する被写体の第1の像が撮像され、画像(第1画像とよぶ)が生成される。続いて、光路が切り替えられて第2光路を通った光が形成する被写体の第2の像が撮像され、画像(第2画像とよぶ)が生成される。そして、第1画像と第2画像が有する視差に基づき、三角測量の方法を用いて被写体の形状が計測される。
【0005】
特許文献1の計測内視鏡装置では、2つの光路を通った光が形成する被写体の2つの像は撮像素子の異なる領域に結像される。これに対して、特許文献2の内視鏡装置では、2つの光路を通った光が形成する被写体の2つの像は撮像素子の共通の領域に結像される。このため、特許文献2の内視鏡装置では、撮像面積を大きくすることができ、撮像画質と計測精度を向上させることができる。
【0006】
ただし、第1画像と第2画像を撮像する間に内視鏡や被写体が動くと、三角測量のパラメーター(基線長など)に誤差が生じてしまい、被写体の形状を正確に計測できなくなる。そこで、特許文献3に示されるように、被写体や撮像装置のぶれを検出した場合にはその旨を通知することで、成功するまで計測をやり直すことができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−49638号公報
【特許文献2】特開2010−128354号公報
【特許文献3】特開2002−228413号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献2の内視鏡装置において、ぶれの検出を行う場合、複数毎の画像を撮像し、これら複数毎の画像を比較することにより、ぶれを検出することが可能である。ただし、第1画像と第2画像では視差があり、そのまま第1画像と第2画像を比較しても、ぶれを正確に検出することができないので、例えば複数毎の第1画像を撮像し、これら複数毎の第1画像を比較し、ぶれが検出されなかった場合に第2画像を撮像し、第1画像と第2画像を用いて被写体の形状を計測する方法が考えられる。しかし、この方法では、第2画像の撮像時に発生するぶれを考慮していないので、第2画像の撮像時にぶれが発生している場合、計測精度が低下する可能性がある。
【0009】
本発明は、上述した課題に鑑みてなされたものであって、計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記の課題を解決するためになされたもので、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、前記切替部、前記撮像部、前記計測部、および前記表示部を制御する制御部と、を備え、前記制御部は、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を有する制御を行うことを特徴とする内視鏡装置である。
【0011】
また、本発明の内視鏡装置において、前記制御部は、前記第1ステップでぶれがないと判定した場合に前記第2ステップの制御を行うことを特徴とする。
【0012】
また、本発明の内視鏡装置において、前記制御部は、前記第1ステップでぶれがあると判定した場合に、ぶれがないと判定するまで前記第1ステップの制御を繰り返すことを特徴とする。
【0013】
また、本発明の内視鏡装置において、前記制御部は、前記第3ステップでぶれがあると判定した場合に、ぶれがないと判定するまで、前記第1ステップ、前記第2ステップ、前記第3ステップの制御を繰り返すことを特徴とする。
【0014】
また、本発明の内視鏡装置において、前記制御部はさらに、前記第4ステップにおいて、前記第1画像を前記表示部に表示させることを特徴とする。
【0015】
また、本発明は、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、を備えた内視鏡装置の制御を行う際、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を有する制御を行うことを特徴とする内視鏡装置の制御方法である。
【0016】
また、本発明は、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、を備えた内視鏡装置のコンピュータに、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を実行させるためのプログラムである。
【発明の効果】
【0017】
本発明によれば、第1ステップにおいて、複数枚の第1画像に基づいて、ぶれの有無を判定し、第3ステップにおいて、第1ステップで生成された第1画像および第2ステップの後に生成された第1画像に基づいて、ぶれの有無を判定し、第1ステップおよび第3ステップでぶれがないと判定した場合に計測部に計測を行わせることによって、計測精度の低下を低減することができる。
【0018】
また、本発明によれば、第2ステップにおいて、第2画像が生成される際にも第1画像が表示されるので、表示部が、表示する画像を第1画像から第2画像に切り替える場合に発生しうる画像のちらつきはなく、使用者の眼の負担を軽減することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態による内視鏡装置の全体構成を示す斜視図である。
【図2】本発明の一実施形態による内視鏡装置の機能構成を示すブロック図である。
【図3】本発明の一実施形態による内視鏡装置が備える制御部の動作を示すフローチャートである。
【図4】本発明の一実施形態による内視鏡装置が備える表示部が表示する内容を示す参考図である。
【図5】本発明の一実施形態による内視鏡装置が備える制御部の動作を示すフローチャートである。
【発明を実施するための形態】
【0020】
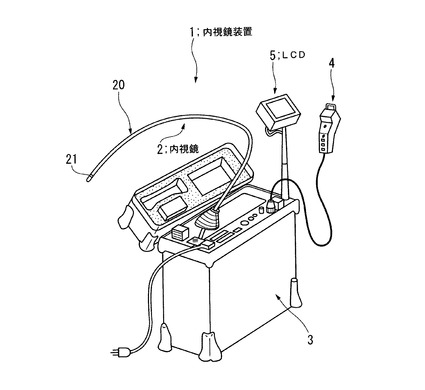
以下、図面を参照し、本発明の実施形態を説明する。図1は、本発明の一実施形態による内視鏡装置の全体構成を示している。図1に示すように、内視鏡装置1は、細長な挿入部20を有する内視鏡2と、この内視鏡2の挿入部20を収納する収納部を備えた制御装置であるコントロールユニット3と、装置全体の各種動作制御を行う際に必要な操作を行うための操作部4と、内視鏡画像や操作制御内容(例えば処理メニュー)等の表示を行う表示部5とを含んで構成されている。挿入部20の先端には、被写体を撮像して画像データを生成する撮像素子を含む先端部21が配置されている。
【0021】
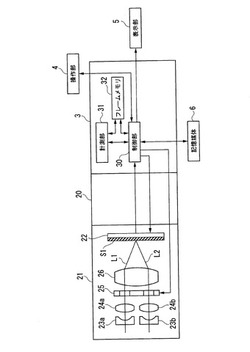
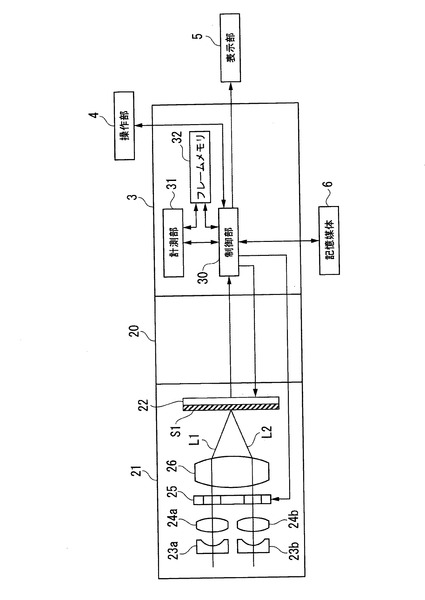
図2は内視鏡装置の機能構成を示している。挿入部20の先端に配置された先端部21は、撮像素子22、凹レンズ23a,23b、凸レンズ24a,24b、切替部25、結像光学系26を有する。コントロールユニット3は、制御部30、計測部31、フレームメモリ32を有する。図2では光源等の図示は省略されている。
【0022】
凹レンズ23a、凸レンズ24a、結像光学系26は、被写体からの光が形成する第1の像を撮像素子22の領域S1に結像する第1光学系を構成する。凹レンズ23b、凸レンズ24b、結像光学系26は、被写体からの光が形成する第2の像を撮像素子22の領域S1に結像する第2光学系を構成する。第1光学系に入射した被写体からの光は第1光路L1を通り、撮像素子22の領域S1に第1の像として結像される。第2光学系に入射した被写体からの光は第2光路L2を通り、撮像素子22の領域S1に第2の像として結像される。第1の像と第2の像は、撮像素子22の共通の領域S1に結像される。
【0023】
切替部25は、第1の像および第2の像のうちのいずれか一方の像のみが領域S1に結像されるように、第1光路L1と第2光路L2の間で光路を切り替える。切替部25による光路の切替動作は、コントロールユニット3内の制御部30からの制御信号によって制御される。撮像素子22は、切替部25によって第1光路が設定されている場合に、領域S1に結像された第1の像に基づく第1画像(第1画像データ)を生成し、切替部25によって第2光路が設定されている場合に、領域S1に結像された第2の像に基づく第2画像(第2画像データ)を生成する。第1画像は第2画像に対して、あるいは、第2画像は第1画像に対して視差を有する。撮像素子22によって生成された第1画像および第2画像はコントロールユニット3へ出力される。撮像素子22の動作は、コントロールユニット3内の制御部30からの制御信号によって制御される。
【0024】
制御部30は、コントロールユニット3内の各部や、撮像素子22、切替部25、操作部4、表示部5を制御する。制御部30が有するマイクロコンピュータの動作を実現するためのプログラムは、図示していないROMに格納されており、制御部30は、このプログラムに従って制御を行う。計測部31は、撮像素子22から出力された第1画像および第2画像に基づいて、2つの画像が有する視差を利用した三角測量を行うステレオ計測により、被写体の形状(サイズ)あるいは被写体までの距離を計測する。フレームメモリ32は、撮像素子22から出力された第1画像および第2画像を記憶する。コントロールユニット3には、取り外し可能な記憶媒体6を接続することが可能であり、撮像した画像等のデータを記憶媒体6に記憶させたり、記憶媒体6に記憶されている画像等のデータを記憶媒体6から読み出したりすることが可能である。
【0025】
次に、図3および図4を参照して、内視鏡装置1による計測時の動作例を説明する。図3は計測時の制御部30の動作を示しており、図4は計測時に表示部5が表示する内容(表示内容)を示している。
【0026】
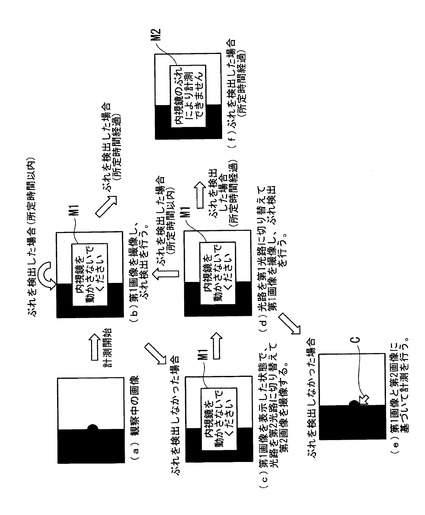
使用者が被写体の内部を観察する場合、切替部25は光路を第1光路に設定する。撮像素子22は、領域S1に結像された第1の像に基づく第1画像を生成し、コントロールユニット3へ出力する。制御部30は、撮像素子22から出力された第1画像を表示部5へ出力し、表示部5に第1画像を表示させる。図4(a)は、このときの表示部5の表示内容を示している。表示部5は第1画像を表示している。
【0027】
(ステップS100)
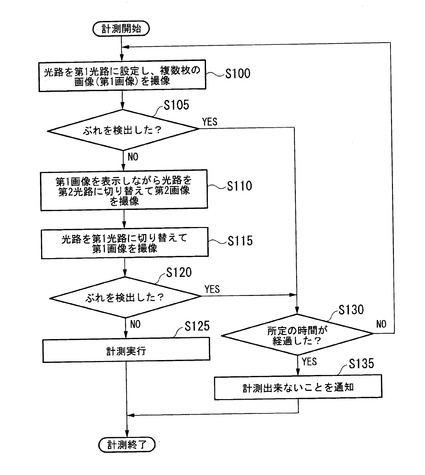
使用者が被写体の内部の観察により傷等の不具合箇所を発見し計測を行う場合、操作部4を介して計測指示が入力される。制御部30は、計測指示に基づいて、図3に示す制御動作を開始する。制御動作を開始した制御部30は、ぶれに対する注意を示すメッセージを表示部5に表示させ、撮像素子22に対して、複数毎(例えば2枚)の第1画像の撮像を指示する制御信号を出力する。撮像素子22は、複数回撮像を行い、複数毎の第1画像を出力する。制御部30は、撮像素子22から順次出力された第1画像をフレームメモリ32に順次格納すると共に、表示部5に第1画像を順次出力し、表示部5に第1画像を表示させる。
【0028】
図4(b)は、ステップS100における表示部5の表示内容を示している。表示部5は、ステップS100で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。本実施形態では、表示部5がメッセージを表示しているが、メッセージを表示しなくてもよい。これ以降に表示されるメッセージについても同様に、表示しなくてもよい。
【0029】
(ステップS105)
ぶれの検出に必要な複数枚の第1画像がフレームメモリ32に格納されると、制御部30は、これら複数枚の第1画像に基づいて、ぶれの検出を行う。ぶれの検出方法として、例えば、画素毎に2枚の画像間の画素値の差の絶対値を計算し、その合計が所定値以上であれば、ぶれを検出した(ぶれが発生した・ぶれがある)と判定し、その合計が所定値未満であれば、ぶれを検出しなかった(ぶれが発生していない・ぶれがない)と判定する方法がある。ぶれの検出方法は、他の方法でもよい。ぶれの検出が行われている間、表示部5の表示内容はステップS100での表示内容と同一である。
【0030】
(ステップS110)
ステップS105において、ぶれを検出しなかったと判定した場合、制御部30は、切替部25に対して、第1光路から第2光路への光路の切替を指示する制御信号を出力し、撮像素子22に対して、第2画像の撮像を指示する制御信号を出力する。切替部25は、光路を第2光路に設定する。撮像素子22は、撮像を行い、第2画像を出力する。制御部30は、撮像素子22から出力された第2画像をフレームメモリ32に格納する。
【0031】
図4(c)は、ステップS110における表示部5の表示内容を示している。表示部5は、ステップS100で最後に生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0032】
(ステップS115)
制御部30は、切替部25に対して、第2光路から第1光路への光路の切替を指示する制御信号を出力し、撮像素子22に対して、第1画像の撮像を指示する制御信号を出力する。切替部25は、光路を第1光路に設定する。撮像素子22は、撮像を行い、第1画像を出力する。制御部30は、撮像素子22から出力された第1画像をフレームメモリ32に格納すると共に、表示部5に第1画像を出力し、表示部5に第1画像を表示させる。
【0033】
図4(d)は、ステップS115における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0034】
(ステップS120)
制御部30は、フレームメモリ32に格納されている複数枚の第1画像に基づいて、ぶれの検出を行う。ステップS120でのぶれの検出に用いる複数枚の第1画像は、ステップS100で最後に生成された第1画像と、ステップS115で生成された第1画像とを少なくとも含む。ぶれの検出方法は、ステップS105でのぶれの検出方法と同様でよい。ぶれの検出が行われている間、表示部5の表示内容はステップS115での表示内容と同一である。
【0035】
図4(d)は、ステップS120における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0036】
(ステップS125)
ステップS120において、ぶれを検出しなかったと判定した場合、制御部30は、計測部31に計測を指示する。計測部31は、フレームメモリ32に格納されている、ステップS115で生成された第1画像と、ステップS110で生成された第2画像とに基づいて、被写体の形状を計測する。計測に用いる第1画像は、ステップS100で生成された第1画像(ステップS105でのぶれの検出に用いられた第1画像)でもよい。計測部31は計測結果を制御部30に通知する。制御部30は計測結果を表示部5に表示させ、計測時の制御動作を終了する。
【0037】
図4(e)は、ステップS125における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、計測位置(計測点)を指定するためのカーソルCとを表示している。
【0038】
使用者は、操作部4を操作することにより、カーソルCを移動させ、第1画像上で計測位置を指定することが可能である。計測部31は、第1画像上で計測位置が指定されると、指定された計測位置に対応する第2画像上の対応位置を算出するマッチング処理を行う。さらに、計測部31は、第1画像上の計測位置および第2画像上の対応位置のそれぞれの2次元座標(画像内の座標)に基づいて、これらの位置に対応する3次元座標を算出する。計測部31は、第1画像上で指定された複数の計測位置に対応する複数の3次元座標を算出し、これら複数の3次元座標に基づいて、被写体の形状を計測する。
【0039】
(ステップS130)
ステップS105またはステップS120において、ぶれを検出したと判定した場合、制御部30は、図3に示す制御動作を開始した時点から所定の時間が経過したか否かを判定する。所定の時間が経過していない場合、制御部30は、再度、ステップS100の動作を行う。
【0040】
(ステップS135)
所定の時間が経過した場合、制御部30は、ぶれのために計測できないことを示すメッセージを表示部5に表示させ、計測時の制御動作を終了する。図4(f)は、ステップS135における表示部5の表示内容を示している。表示部5は、ステップS100またはステップS115で生成された第1画像と、ぶれのために計測できないことを示すメッセージM2とを表示している。
【0041】
上記の動作では、ステップS105とステップS120でぶれの検出が行われ、両方のステップでぶれが検出されなかった場合に、計測部31による計測が行われる。ステップS105でぶれの検出を行うことにより、光路を第1光路から第2光路に切り替えて第2画像の撮像を行うことが可能か否かを判定することができる。また、ステップS120でぶれの検出を行うことにより、ステップS100とステップS115の間でぶれが発生したか否か、すなわち、第2画像の撮像時にぶれが発生したか否かを判定することができる。したがって、上記のようにぶれの検出を2回行い、2回ともぶれが検出されなかった場合に計測を行うことによって、計測精度の低下を低減することができる。
【0042】
上記の動作では、第2画像の撮像を行うステップS110で第1画像を表示しているが、仮に第2画像を表示すると、第1画像から第2画像への表示の切替が発生する。使用者は、この表示の切替による表示内容の変化をちらつき(フリッカ)として感じる。この変化は使用者にとって不要であり、使用者の眼に負担をかけることになる。上記の動作では、第2画像の撮像を行う際も、表示部5は第1画像を表示するので、画像のちらつきがなくなり、使用者の眼の負担を軽減することができる。
【0043】
次に、図5を参照して、内視鏡装置1による計測時の他の動作例を説明する。図5は計測時の制御部30の動作を示している。図5に示される動作は、表示される画像の更新を行いながら被写体までの距離(物体距離)を連続的に計測するリアルタイム計測の動作である。
【0044】
図5において、図3に示される動作と同一の動作を行うステップには、図3で用いている符号と同一の符号が付与されている。以下では、図3に示される動作と異なる動作のみについて説明する。
【0045】
(ステップS140)
ステップS120において、ぶれを検出しなかったと判定した場合、制御部30は、計測部31に計測を指示する。計測部31は、フレームメモリ32に格納されている、ステップS115で生成された第1画像と、ステップS110で生成された第2画像とに基づいて、被写体までの距離を計測する。前述したように、第1画像上の計測位置および第2画像上の対応位置のそれぞれの2次元座標に基づいて、これらの位置に対応する3次元座標が算出される。例えば、この3次元座標のZ座標が被写体までの距離に相当する。計測に用いる第1画像は、ステップS100で生成された第1画像(ステップS105でのぶれの検出に用いられた第1画像)でもよい。計測部31は計測結果を制御部30に通知する。制御部30は計測結果を表示部5に表示させ、ステップS100の動作を再度行う。
【0046】
一方、ステップS105またはステップS120において、ぶれを検出したと判定した場合、ステップS135の動作が行われ、ぶれのために計測できないことを示すメッセージが表示される。
【0047】
図5に示される動作では、被写体までの距離を繰り返し計測することができる。また、1回の計測を行う前にぶれの検出を2回行うことにより、計測精度の低下を低減することができる。さらに、第2画像の撮像を行う際も、表示部5は第1画像を表示するので、画像のちらつきがなくなり、使用者の眼の負担を軽減することができる。
【0048】
上述したように、本実施形態によれば、ステップS105とステップS120において、ぶれの有無を判定し、両方のステップでぶれがないと判定した場合に、計測部31による計測が行われるので、計測精度の低下を低減することができる。また、ステップS110で第2画像が生成される際にも第1画像が表示されるので、表示部5が、表示する画像を第1画像から第2画像に切り替える場合に発生しうる画像のちらつきはなく、使用者の眼の負担を軽減することができる。
【0049】
また、ステップS105でぶれを検出したと判定した場合に、ぶれを検出しなかったと判定するまで第1画像の撮像(ステップS100)とぶれの検出(ステップS105)を繰り返すことによって、ぶれが発生していない期間に計測を行うことができるので、計測精度の低下を低減することができる。
【0050】
また、ステップS120でぶれを検出したと判定した場合に、ぶれを検出しなかったと判定するまで、第1画像の撮像(ステップS100)、ぶれの検出(ステップS105)、第2画像の撮像(ステップS110)、第1画像の撮像(ステップS115)、ぶれの検出(ステップS120)を繰り返すことによって、ぶれが発生していない期間に計測を行うことができるので、計測精度の低下を低減することができる。
【0051】
さらに、ステップS125,S140で計測が行われる際にも第1画像が表示されるので、使用者の眼の負担を軽減することができる。
【0052】
以上、図面を参照して本発明の実施形態について詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0053】
1・・・内視鏡装置、2・・・内視鏡、3・・・コントロールユニット、4・・・操作部、5・・・表示部、6・・・記憶媒体、20・・・挿入部、21・・・先端部、22・・・撮像素子(撮像部)、23a,23b・・・凹レンズ、24a,24b・・・凸レンズ、25・・・切替部、26・・・結像光学系、30・・・制御部、31・・・計測部、32・・・フレームメモリ
【技術分野】
【0001】
本発明は、計測機能を有する内視鏡装置およびその制御方法に関する。また、本発明は、内視鏡装置における計測機能をコンピュータ上で実現するためのプログラムにも関する。
【背景技術】
【0002】
近年、ボイラー、タービン、エンジン、化学プラントなどの検査において、内部の傷や腐食を観察するのに工業用内視鏡が広く用いられている。特許文献1に示されるように、工業用内視鏡の具体例として、内視鏡の先端に2個の光学系を設け、三角測量の原理を利用したステレオ計測により3次元計測を実現した計測内視鏡装置がある。このような計測内視鏡装置を用いて、検査で内部に傷などの不具合箇所が発見された際に傷の大きさ等を計測することで、分解・修理の必要性を判断することができる。
【0003】
また、特許文献2で示される内視鏡装置は、2つの異なる光路(第1光路と第2光路とよぶ)を通った光が形成する被写体の2つの像を撮像素子の共通の領域に結像させる光学系と、2つの光路のうちのいずれか一方の光路を通った光のみが形成する被写体の像を撮像するように光路を切り替える光路切り替え手段とを備えている。
【0004】
この内視鏡装置を用いて被写体を観察する場合、第1光路を通った光が形成する被写体の第1の像の撮像により画像が生成され、使用者はその画像を観察する。使用者が、観察中に発見した傷の大きさ等を計測する際は、次のように画像の撮像と計測が行われる。最初に、第1光路を通った光が形成する被写体の第1の像が撮像され、画像(第1画像とよぶ)が生成される。続いて、光路が切り替えられて第2光路を通った光が形成する被写体の第2の像が撮像され、画像(第2画像とよぶ)が生成される。そして、第1画像と第2画像が有する視差に基づき、三角測量の方法を用いて被写体の形状が計測される。
【0005】
特許文献1の計測内視鏡装置では、2つの光路を通った光が形成する被写体の2つの像は撮像素子の異なる領域に結像される。これに対して、特許文献2の内視鏡装置では、2つの光路を通った光が形成する被写体の2つの像は撮像素子の共通の領域に結像される。このため、特許文献2の内視鏡装置では、撮像面積を大きくすることができ、撮像画質と計測精度を向上させることができる。
【0006】
ただし、第1画像と第2画像を撮像する間に内視鏡や被写体が動くと、三角測量のパラメーター(基線長など)に誤差が生じてしまい、被写体の形状を正確に計測できなくなる。そこで、特許文献3に示されるように、被写体や撮像装置のぶれを検出した場合にはその旨を通知することで、成功するまで計測をやり直すことができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−49638号公報
【特許文献2】特開2010−128354号公報
【特許文献3】特開2002−228413号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献2の内視鏡装置において、ぶれの検出を行う場合、複数毎の画像を撮像し、これら複数毎の画像を比較することにより、ぶれを検出することが可能である。ただし、第1画像と第2画像では視差があり、そのまま第1画像と第2画像を比較しても、ぶれを正確に検出することができないので、例えば複数毎の第1画像を撮像し、これら複数毎の第1画像を比較し、ぶれが検出されなかった場合に第2画像を撮像し、第1画像と第2画像を用いて被写体の形状を計測する方法が考えられる。しかし、この方法では、第2画像の撮像時に発生するぶれを考慮していないので、第2画像の撮像時にぶれが発生している場合、計測精度が低下する可能性がある。
【0009】
本発明は、上述した課題に鑑みてなされたものであって、計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記の課題を解決するためになされたもので、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、前記切替部、前記撮像部、前記計測部、および前記表示部を制御する制御部と、を備え、前記制御部は、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を有する制御を行うことを特徴とする内視鏡装置である。
【0011】
また、本発明の内視鏡装置において、前記制御部は、前記第1ステップでぶれがないと判定した場合に前記第2ステップの制御を行うことを特徴とする。
【0012】
また、本発明の内視鏡装置において、前記制御部は、前記第1ステップでぶれがあると判定した場合に、ぶれがないと判定するまで前記第1ステップの制御を繰り返すことを特徴とする。
【0013】
また、本発明の内視鏡装置において、前記制御部は、前記第3ステップでぶれがあると判定した場合に、ぶれがないと判定するまで、前記第1ステップ、前記第2ステップ、前記第3ステップの制御を繰り返すことを特徴とする。
【0014】
また、本発明の内視鏡装置において、前記制御部はさらに、前記第4ステップにおいて、前記第1画像を前記表示部に表示させることを特徴とする。
【0015】
また、本発明は、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、を備えた内視鏡装置の制御を行う際、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を有する制御を行うことを特徴とする内視鏡装置の制御方法である。
【0016】
また、本発明は、第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、表示部と、を備えた内視鏡装置のコンピュータに、前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、を実行させるためのプログラムである。
【発明の効果】
【0017】
本発明によれば、第1ステップにおいて、複数枚の第1画像に基づいて、ぶれの有無を判定し、第3ステップにおいて、第1ステップで生成された第1画像および第2ステップの後に生成された第1画像に基づいて、ぶれの有無を判定し、第1ステップおよび第3ステップでぶれがないと判定した場合に計測部に計測を行わせることによって、計測精度の低下を低減することができる。
【0018】
また、本発明によれば、第2ステップにおいて、第2画像が生成される際にも第1画像が表示されるので、表示部が、表示する画像を第1画像から第2画像に切り替える場合に発生しうる画像のちらつきはなく、使用者の眼の負担を軽減することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態による内視鏡装置の全体構成を示す斜視図である。
【図2】本発明の一実施形態による内視鏡装置の機能構成を示すブロック図である。
【図3】本発明の一実施形態による内視鏡装置が備える制御部の動作を示すフローチャートである。
【図4】本発明の一実施形態による内視鏡装置が備える表示部が表示する内容を示す参考図である。
【図5】本発明の一実施形態による内視鏡装置が備える制御部の動作を示すフローチャートである。
【発明を実施するための形態】
【0020】
以下、図面を参照し、本発明の実施形態を説明する。図1は、本発明の一実施形態による内視鏡装置の全体構成を示している。図1に示すように、内視鏡装置1は、細長な挿入部20を有する内視鏡2と、この内視鏡2の挿入部20を収納する収納部を備えた制御装置であるコントロールユニット3と、装置全体の各種動作制御を行う際に必要な操作を行うための操作部4と、内視鏡画像や操作制御内容(例えば処理メニュー)等の表示を行う表示部5とを含んで構成されている。挿入部20の先端には、被写体を撮像して画像データを生成する撮像素子を含む先端部21が配置されている。
【0021】
図2は内視鏡装置の機能構成を示している。挿入部20の先端に配置された先端部21は、撮像素子22、凹レンズ23a,23b、凸レンズ24a,24b、切替部25、結像光学系26を有する。コントロールユニット3は、制御部30、計測部31、フレームメモリ32を有する。図2では光源等の図示は省略されている。
【0022】
凹レンズ23a、凸レンズ24a、結像光学系26は、被写体からの光が形成する第1の像を撮像素子22の領域S1に結像する第1光学系を構成する。凹レンズ23b、凸レンズ24b、結像光学系26は、被写体からの光が形成する第2の像を撮像素子22の領域S1に結像する第2光学系を構成する。第1光学系に入射した被写体からの光は第1光路L1を通り、撮像素子22の領域S1に第1の像として結像される。第2光学系に入射した被写体からの光は第2光路L2を通り、撮像素子22の領域S1に第2の像として結像される。第1の像と第2の像は、撮像素子22の共通の領域S1に結像される。
【0023】
切替部25は、第1の像および第2の像のうちのいずれか一方の像のみが領域S1に結像されるように、第1光路L1と第2光路L2の間で光路を切り替える。切替部25による光路の切替動作は、コントロールユニット3内の制御部30からの制御信号によって制御される。撮像素子22は、切替部25によって第1光路が設定されている場合に、領域S1に結像された第1の像に基づく第1画像(第1画像データ)を生成し、切替部25によって第2光路が設定されている場合に、領域S1に結像された第2の像に基づく第2画像(第2画像データ)を生成する。第1画像は第2画像に対して、あるいは、第2画像は第1画像に対して視差を有する。撮像素子22によって生成された第1画像および第2画像はコントロールユニット3へ出力される。撮像素子22の動作は、コントロールユニット3内の制御部30からの制御信号によって制御される。
【0024】
制御部30は、コントロールユニット3内の各部や、撮像素子22、切替部25、操作部4、表示部5を制御する。制御部30が有するマイクロコンピュータの動作を実現するためのプログラムは、図示していないROMに格納されており、制御部30は、このプログラムに従って制御を行う。計測部31は、撮像素子22から出力された第1画像および第2画像に基づいて、2つの画像が有する視差を利用した三角測量を行うステレオ計測により、被写体の形状(サイズ)あるいは被写体までの距離を計測する。フレームメモリ32は、撮像素子22から出力された第1画像および第2画像を記憶する。コントロールユニット3には、取り外し可能な記憶媒体6を接続することが可能であり、撮像した画像等のデータを記憶媒体6に記憶させたり、記憶媒体6に記憶されている画像等のデータを記憶媒体6から読み出したりすることが可能である。
【0025】
次に、図3および図4を参照して、内視鏡装置1による計測時の動作例を説明する。図3は計測時の制御部30の動作を示しており、図4は計測時に表示部5が表示する内容(表示内容)を示している。
【0026】
使用者が被写体の内部を観察する場合、切替部25は光路を第1光路に設定する。撮像素子22は、領域S1に結像された第1の像に基づく第1画像を生成し、コントロールユニット3へ出力する。制御部30は、撮像素子22から出力された第1画像を表示部5へ出力し、表示部5に第1画像を表示させる。図4(a)は、このときの表示部5の表示内容を示している。表示部5は第1画像を表示している。
【0027】
(ステップS100)
使用者が被写体の内部の観察により傷等の不具合箇所を発見し計測を行う場合、操作部4を介して計測指示が入力される。制御部30は、計測指示に基づいて、図3に示す制御動作を開始する。制御動作を開始した制御部30は、ぶれに対する注意を示すメッセージを表示部5に表示させ、撮像素子22に対して、複数毎(例えば2枚)の第1画像の撮像を指示する制御信号を出力する。撮像素子22は、複数回撮像を行い、複数毎の第1画像を出力する。制御部30は、撮像素子22から順次出力された第1画像をフレームメモリ32に順次格納すると共に、表示部5に第1画像を順次出力し、表示部5に第1画像を表示させる。
【0028】
図4(b)は、ステップS100における表示部5の表示内容を示している。表示部5は、ステップS100で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。本実施形態では、表示部5がメッセージを表示しているが、メッセージを表示しなくてもよい。これ以降に表示されるメッセージについても同様に、表示しなくてもよい。
【0029】
(ステップS105)
ぶれの検出に必要な複数枚の第1画像がフレームメモリ32に格納されると、制御部30は、これら複数枚の第1画像に基づいて、ぶれの検出を行う。ぶれの検出方法として、例えば、画素毎に2枚の画像間の画素値の差の絶対値を計算し、その合計が所定値以上であれば、ぶれを検出した(ぶれが発生した・ぶれがある)と判定し、その合計が所定値未満であれば、ぶれを検出しなかった(ぶれが発生していない・ぶれがない)と判定する方法がある。ぶれの検出方法は、他の方法でもよい。ぶれの検出が行われている間、表示部5の表示内容はステップS100での表示内容と同一である。
【0030】
(ステップS110)
ステップS105において、ぶれを検出しなかったと判定した場合、制御部30は、切替部25に対して、第1光路から第2光路への光路の切替を指示する制御信号を出力し、撮像素子22に対して、第2画像の撮像を指示する制御信号を出力する。切替部25は、光路を第2光路に設定する。撮像素子22は、撮像を行い、第2画像を出力する。制御部30は、撮像素子22から出力された第2画像をフレームメモリ32に格納する。
【0031】
図4(c)は、ステップS110における表示部5の表示内容を示している。表示部5は、ステップS100で最後に生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0032】
(ステップS115)
制御部30は、切替部25に対して、第2光路から第1光路への光路の切替を指示する制御信号を出力し、撮像素子22に対して、第1画像の撮像を指示する制御信号を出力する。切替部25は、光路を第1光路に設定する。撮像素子22は、撮像を行い、第1画像を出力する。制御部30は、撮像素子22から出力された第1画像をフレームメモリ32に格納すると共に、表示部5に第1画像を出力し、表示部5に第1画像を表示させる。
【0033】
図4(d)は、ステップS115における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0034】
(ステップS120)
制御部30は、フレームメモリ32に格納されている複数枚の第1画像に基づいて、ぶれの検出を行う。ステップS120でのぶれの検出に用いる複数枚の第1画像は、ステップS100で最後に生成された第1画像と、ステップS115で生成された第1画像とを少なくとも含む。ぶれの検出方法は、ステップS105でのぶれの検出方法と同様でよい。ぶれの検出が行われている間、表示部5の表示内容はステップS115での表示内容と同一である。
【0035】
図4(d)は、ステップS120における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、ぶれに対する注意を示すメッセージM1とを表示している。
【0036】
(ステップS125)
ステップS120において、ぶれを検出しなかったと判定した場合、制御部30は、計測部31に計測を指示する。計測部31は、フレームメモリ32に格納されている、ステップS115で生成された第1画像と、ステップS110で生成された第2画像とに基づいて、被写体の形状を計測する。計測に用いる第1画像は、ステップS100で生成された第1画像(ステップS105でのぶれの検出に用いられた第1画像)でもよい。計測部31は計測結果を制御部30に通知する。制御部30は計測結果を表示部5に表示させ、計測時の制御動作を終了する。
【0037】
図4(e)は、ステップS125における表示部5の表示内容を示している。表示部5は、ステップS115で生成された第1画像と、計測位置(計測点)を指定するためのカーソルCとを表示している。
【0038】
使用者は、操作部4を操作することにより、カーソルCを移動させ、第1画像上で計測位置を指定することが可能である。計測部31は、第1画像上で計測位置が指定されると、指定された計測位置に対応する第2画像上の対応位置を算出するマッチング処理を行う。さらに、計測部31は、第1画像上の計測位置および第2画像上の対応位置のそれぞれの2次元座標(画像内の座標)に基づいて、これらの位置に対応する3次元座標を算出する。計測部31は、第1画像上で指定された複数の計測位置に対応する複数の3次元座標を算出し、これら複数の3次元座標に基づいて、被写体の形状を計測する。
【0039】
(ステップS130)
ステップS105またはステップS120において、ぶれを検出したと判定した場合、制御部30は、図3に示す制御動作を開始した時点から所定の時間が経過したか否かを判定する。所定の時間が経過していない場合、制御部30は、再度、ステップS100の動作を行う。
【0040】
(ステップS135)
所定の時間が経過した場合、制御部30は、ぶれのために計測できないことを示すメッセージを表示部5に表示させ、計測時の制御動作を終了する。図4(f)は、ステップS135における表示部5の表示内容を示している。表示部5は、ステップS100またはステップS115で生成された第1画像と、ぶれのために計測できないことを示すメッセージM2とを表示している。
【0041】
上記の動作では、ステップS105とステップS120でぶれの検出が行われ、両方のステップでぶれが検出されなかった場合に、計測部31による計測が行われる。ステップS105でぶれの検出を行うことにより、光路を第1光路から第2光路に切り替えて第2画像の撮像を行うことが可能か否かを判定することができる。また、ステップS120でぶれの検出を行うことにより、ステップS100とステップS115の間でぶれが発生したか否か、すなわち、第2画像の撮像時にぶれが発生したか否かを判定することができる。したがって、上記のようにぶれの検出を2回行い、2回ともぶれが検出されなかった場合に計測を行うことによって、計測精度の低下を低減することができる。
【0042】
上記の動作では、第2画像の撮像を行うステップS110で第1画像を表示しているが、仮に第2画像を表示すると、第1画像から第2画像への表示の切替が発生する。使用者は、この表示の切替による表示内容の変化をちらつき(フリッカ)として感じる。この変化は使用者にとって不要であり、使用者の眼に負担をかけることになる。上記の動作では、第2画像の撮像を行う際も、表示部5は第1画像を表示するので、画像のちらつきがなくなり、使用者の眼の負担を軽減することができる。
【0043】
次に、図5を参照して、内視鏡装置1による計測時の他の動作例を説明する。図5は計測時の制御部30の動作を示している。図5に示される動作は、表示される画像の更新を行いながら被写体までの距離(物体距離)を連続的に計測するリアルタイム計測の動作である。
【0044】
図5において、図3に示される動作と同一の動作を行うステップには、図3で用いている符号と同一の符号が付与されている。以下では、図3に示される動作と異なる動作のみについて説明する。
【0045】
(ステップS140)
ステップS120において、ぶれを検出しなかったと判定した場合、制御部30は、計測部31に計測を指示する。計測部31は、フレームメモリ32に格納されている、ステップS115で生成された第1画像と、ステップS110で生成された第2画像とに基づいて、被写体までの距離を計測する。前述したように、第1画像上の計測位置および第2画像上の対応位置のそれぞれの2次元座標に基づいて、これらの位置に対応する3次元座標が算出される。例えば、この3次元座標のZ座標が被写体までの距離に相当する。計測に用いる第1画像は、ステップS100で生成された第1画像(ステップS105でのぶれの検出に用いられた第1画像)でもよい。計測部31は計測結果を制御部30に通知する。制御部30は計測結果を表示部5に表示させ、ステップS100の動作を再度行う。
【0046】
一方、ステップS105またはステップS120において、ぶれを検出したと判定した場合、ステップS135の動作が行われ、ぶれのために計測できないことを示すメッセージが表示される。
【0047】
図5に示される動作では、被写体までの距離を繰り返し計測することができる。また、1回の計測を行う前にぶれの検出を2回行うことにより、計測精度の低下を低減することができる。さらに、第2画像の撮像を行う際も、表示部5は第1画像を表示するので、画像のちらつきがなくなり、使用者の眼の負担を軽減することができる。
【0048】
上述したように、本実施形態によれば、ステップS105とステップS120において、ぶれの有無を判定し、両方のステップでぶれがないと判定した場合に、計測部31による計測が行われるので、計測精度の低下を低減することができる。また、ステップS110で第2画像が生成される際にも第1画像が表示されるので、表示部5が、表示する画像を第1画像から第2画像に切り替える場合に発生しうる画像のちらつきはなく、使用者の眼の負担を軽減することができる。
【0049】
また、ステップS105でぶれを検出したと判定した場合に、ぶれを検出しなかったと判定するまで第1画像の撮像(ステップS100)とぶれの検出(ステップS105)を繰り返すことによって、ぶれが発生していない期間に計測を行うことができるので、計測精度の低下を低減することができる。
【0050】
また、ステップS120でぶれを検出したと判定した場合に、ぶれを検出しなかったと判定するまで、第1画像の撮像(ステップS100)、ぶれの検出(ステップS105)、第2画像の撮像(ステップS110)、第1画像の撮像(ステップS115)、ぶれの検出(ステップS120)を繰り返すことによって、ぶれが発生していない期間に計測を行うことができるので、計測精度の低下を低減することができる。
【0051】
さらに、ステップS125,S140で計測が行われる際にも第1画像が表示されるので、使用者の眼の負担を軽減することができる。
【0052】
以上、図面を参照して本発明の実施形態について詳述してきたが、具体的な構成は上記の実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0053】
1・・・内視鏡装置、2・・・内視鏡、3・・・コントロールユニット、4・・・操作部、5・・・表示部、6・・・記憶媒体、20・・・挿入部、21・・・先端部、22・・・撮像素子(撮像部)、23a,23b・・・凹レンズ、24a,24b・・・凸レンズ、25・・・切替部、26・・・結像光学系、30・・・制御部、31・・・計測部、32・・・フレームメモリ
【特許請求の範囲】
【請求項1】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
前記切替部、前記撮像部、前記計測部、および前記表示部を制御する制御部と、
を備え、
前記制御部は、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を有する制御を行うことを特徴とする内視鏡装置。
【請求項2】
前記制御部は、前記第1ステップでぶれがないと判定した場合に前記第2ステップの制御を行うことを特徴とする請求項1に記載の内視鏡装置。
【請求項3】
前記制御部は、前記第1ステップでぶれがあると判定した場合に、ぶれがないと判定するまで前記第1ステップの制御を繰り返すことを特徴とする請求項2に記載の内視鏡装置。
【請求項4】
前記制御部は、前記第3ステップでぶれがあると判定した場合に、ぶれがないと判定するまで、前記第1ステップ、前記第2ステップ、前記第3ステップの制御を繰り返すことを特徴とする請求項1に記載の内視鏡装置。
【請求項5】
前記制御部はさらに、前記第4ステップにおいて、前記第1画像を前記表示部に表示させることを特徴とする請求項1に記載の内視鏡装置。
【請求項6】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
を備えた内視鏡装置の制御を行う際、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を有する制御を行うことを特徴とする内視鏡装置の制御方法。
【請求項7】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
を備えた内視鏡装置のコンピュータに、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を実行させるためのプログラム。
【請求項1】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
前記切替部、前記撮像部、前記計測部、および前記表示部を制御する制御部と、
を備え、
前記制御部は、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を有する制御を行うことを特徴とする内視鏡装置。
【請求項2】
前記制御部は、前記第1ステップでぶれがないと判定した場合に前記第2ステップの制御を行うことを特徴とする請求項1に記載の内視鏡装置。
【請求項3】
前記制御部は、前記第1ステップでぶれがあると判定した場合に、ぶれがないと判定するまで前記第1ステップの制御を繰り返すことを特徴とする請求項2に記載の内視鏡装置。
【請求項4】
前記制御部は、前記第3ステップでぶれがあると判定した場合に、ぶれがないと判定するまで、前記第1ステップ、前記第2ステップ、前記第3ステップの制御を繰り返すことを特徴とする請求項1に記載の内視鏡装置。
【請求項5】
前記制御部はさらに、前記第4ステップにおいて、前記第1画像を前記表示部に表示させることを特徴とする請求項1に記載の内視鏡装置。
【請求項6】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
を備えた内視鏡装置の制御を行う際、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を有する制御を行うことを特徴とする内視鏡装置の制御方法。
【請求項7】
第1光路を通った光が形成する被写体の第1の像および第2光路を通った光が形成する前記被写体の第2の像が共通に結像される領域に前記第1の像および前記第2の像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部と、
前記領域に結像された前記第1の像に基づく第1画像および前記領域に結像された前記第2の像に基づく第2画像を生成する撮像部と、
前記第1画像および前記第2画像に基づいて前記被写体の形状または前記被写体までの距離を計測する計測部と、
表示部と、
を備えた内視鏡装置のコンピュータに、
前記撮像部に、前記第1光路を介した前記第1の像に基づく複数枚の前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、複数枚の前記第1画像に基づいて、ぶれの有無を判定する第1ステップと、
前記切替部に前記第1光路から前記第2光路へと前記光路を切り替えさせ、前記撮像部に前記第2画像を生成させると共に、前記表示部に、前記第1ステップにおいて生成された前記第1画像を表示させる第2ステップと、
前記切替部に前記第2光路から前記第1光路へと前記光路を切り替えさせ、前記撮像部に前記第1画像を生成させると共に、前記表示部に前記第1画像を表示させ、前記第2ステップの前および後に生成された前記第1画像に基づいて、ぶれの有無を判定する第3ステップと、
前記第1ステップおよび前記第3ステップでぶれがないと判定した場合に、前記計測部に前記被写体の形状または前記被写体までの距離を計測させる第4ステップと、
を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−105078(P2013−105078A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249689(P2011−249689)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]