
内視鏡装置
【課題】内視鏡プローブの挿入操作に要する時間を短縮させることが可能な内視鏡装置を提供する。
【解決手段】本発明の内視鏡装置は、被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、先端部の変位量を検出する変位量検出部と、撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、変位量検出部の検出結果に基づいて算出される先端部の位置情報を含むトレースデータを取得するトレースデータ取得部と、トレースデータと、記録用の画像データと、を関連付けて記録させるための処理を行う記録制御部と、を有する。
【解決手段】本発明の内視鏡装置は、被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、先端部の変位量を検出する変位量検出部と、撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、変位量検出部の検出結果に基づいて算出される先端部の位置情報を含むトレースデータを取得するトレースデータ取得部と、トレースデータと、記録用の画像データと、を関連付けて記録させるための処理を行う記録制御部と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内視鏡装置に関し、特に、被観察物の内部の観察を行うことが可能な内視鏡装置に関するものである。
【背景技術】
【0002】
工業用分野の内視鏡装置は、例えば、工場の配管等の被観察物に対する検査の際に広く用いられている。そして、このような工業用分野の内視鏡装置としては、例えば、特許文献1のようなものが広く知られている。
【0003】
具体的には、特許文献1には、撮像手段を有し被観察物内に挿入される内視鏡プローブと、該内視鏡プローブの撮像手段で撮像した映像を表示する表示部とを備えた工業用内視鏡装置において、前記内視鏡プローブの先端部の変位量を検出するセンサと、そのセンサの検出値を基に内視鏡プローブの先端部の位置または姿勢の少なくとも一方を求める制御部と、を設けた構成が開示されている。
【0004】
そして、前述の特許文献1の構成によれば、被観察物内の挿入予定経路に沿って予め設定された各ランドマークを順番に通過するように内視鏡プローブを挿入してゆくことにより、内視鏡プローブの先端部を検査位置に到達させることができる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、前述した特許文献1の構成によれば、実際の被観察物内の各ランドマーク間を結ぶ挿入経路においては、作業者の経験または記憶に頼りながら内視鏡プローブの挿入を行わざるを得ない。そのため、前述した特許文献1の構成によれば、内視鏡プローブを被観察物内の検査位置へ挿入してゆく過程における挿入状態の再現性が低く、結果的に、内視鏡プローブの先端部を検査位置に到達させるまでに時間を要してしまう、という課題が生じている。
【0006】
本発明は、前述した事情に鑑みてなされたものであり、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を向上させることにより、内視鏡プローブの挿入操作に要する時間を短縮させることが可能な内視鏡装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の一態様の内視鏡装置は、被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、前記先端部の変位量を検出する変位量検出部と、前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを取得するトレースデータ取得部と、前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、を有する。
【発明の効果】
【0008】
本発明における内視鏡装置によれば、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を向上させることにより、内視鏡プローブの挿入操作に要する時間を短縮させることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る内視鏡装置の要部の構成を示すブロック図。
【図2】本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の一例を示すフローチャート。
【図3】本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の、図2とは異なる例を示すフローチャート。
【図4】本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の一例を示すフローチャート。
【図5】表示部に表示されるガイド情報の一例を示す図。
【図6】本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の、図4とは異なる例を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面を参照しつつ説明を行う。
【0011】
図1から図6は、本発明の実施例に係るものである。
【0012】
図1は、本発明の実施例に係る内視鏡装置の要部の構成を示すブロック図である。
【0013】
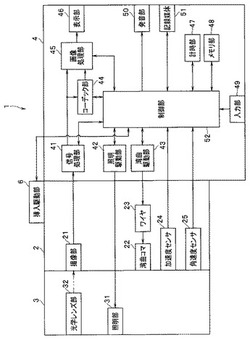
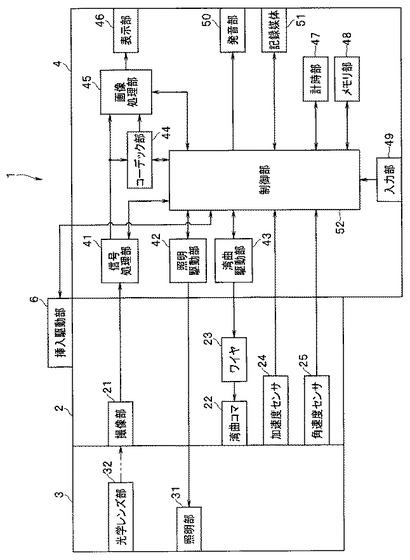
内視鏡装置1は、図1に示すように、管体等の被観察物の内部に挿入可能な細長形状を具備する内視鏡プローブ2と、内視鏡プローブ2の先端部に着脱可能な形状等を具備する光学アダプタ部3と、内視鏡プローブ2の基端部に接続される本体部4と、内視鏡プローブ2の基端側の外部に着脱可能な形状等を具備する挿入駆動部6と、を有している。
【0014】
内視鏡プローブ2は、図1に示すように、撮像部21と、湾曲コマ22と、ワイヤ23と、加速度センサ24と、角速度センサ25と、を有している。
【0015】
撮像部21は、内視鏡プローブ2の先端部に設けられており、撮像素子等を具備して構成されている。また、撮像部21は、光学アダプタ部3の視野領域内の被写体を撮像し、当該撮像した被写体に応じた撮像信号を生成して本体部4へ出力する。
【0016】
湾曲コマ22は、内視鏡プローブ2の先端側の内部に1つ以上設けられており、ワイヤ23の張力に応じて回動することにより、内視鏡プローブ2を湾曲させることができるように構成されている。
【0017】
ワイヤ23は、内視鏡プローブ2の内部に1本以上挿通されており、一端側が湾曲コマ22に接続されているとともに、他端側が本体部4に接続されている。そのため、本体部4から出力される湾曲駆動信号に応じてワイヤ23が緊張または弛緩するに伴い、湾曲コマ22を回動させるための張力が変化する。
【0018】
加速度センサ24は、内視鏡プローブ2の先端部の変位量に相当する内視鏡プローブ2の先端部の3軸方向の加速度を随時検出し、当該検出した3軸方向の加速度を加速度情報として本体部4へ出力する。
【0019】
角速度センサ25は、内視鏡プローブ2の先端部の変位量に相当する内視鏡プローブ2の先端部の3軸方向の角速度を随時検出し、当該検出した3軸方向の角速度を角速度情報として本体部4へ出力する。
【0020】
光学アダプタ部3は、図1に示すように、照明部31と、光学レンズ部32と、を有している。
【0021】
照明部31は、1つ以上のLED等を具備して構成されており、本体部4から出力される照明駆動信号に応じて照明光を出射するように構成されている。
【0022】
光学レンズ部32は、1つ以上のレンズを具備して構成されており、照明部31から出射された照明光の反射光を撮像部21に集光できるように構成されている。
【0023】
本体部4は、図1に示すように、信号処理部41と、照明駆動部42と、湾曲駆動部43と、コーデック部44と、画像処理部45と、表示部46と、計時部47と、メモリ部48と、入力部49と、発音部50と、記録媒体51と、制御部52と、を有している。
【0024】
信号処理部41は、内視鏡プローブ2の撮像部21から出力される撮像信号に対してA/D変換及びノイズ除去等の信号処理を施すことにより、デジタルの画像データを生成してコーデック部44及び画像処理部45へ出力する。
【0025】
照明駆動部42は、制御部52の制御に基づき、照明部31を駆動させるための照明駆動信号を生成して出力する。
【0026】
湾曲駆動部43は、制御部52の制御に基づき、ワイヤ23の牽引長さを変化させることによりワイヤ23を緊張または弛緩させるための湾曲駆動信号を生成して出力する。なお、前述の牽引長さは、例えば、内視鏡プローブ2の先端部をいずれの方向にも湾曲させていない状態を0とした場合の相対的な値として設定される。
【0027】
コーデック部44は、信号処理部41からリアルタイムに出力される画像データに対し、所定のフォーマットに基づく圧縮処理等を施して得られた記録用の(動画または静止画の)画像データを制御部52経由で記録媒体51に書き込む。また、コーデック部44は、制御部52により記録媒体51から読み込まれた(動画または静止画の)画像ファイルに対し、所定のフォーマットに基づく伸長処理等を施す。
【0028】
画像処理部45は、信号処理部41からリアルタイムに出力される画像データと、コーデック部44による処理後の画像データと、に基づき、これら2つの画像データを合成する合成処理、または、これら2つの画像データの中から一方を選択する選択処理を行う。また、画像処理部45は、前述の合成処理または選択処理により得られた画像データに対し、文字等のグラフィックデータを重畳する重畳処理、及び、表示部46に適合する画像処理を施して表示部46へ出力する。さらに、画像処理部45は、制御部52の制御に基づき、後述のガイド情報を生成して表示部46に表示させる。
【0029】
表示部46は、LCD(液晶ディスプレイ)等を具備して構成されており、画像処理部45から出力される画像データ等を表示する。
【0030】
計時部47は、RTC(リアルタイムクロック)等を具備して構成されており、現在の日時及び時刻を計測して得られた計時データを制御部52へ出力する。
【0031】
メモリ部48は、RAM等を具備して構成されており、制御部52の演算処理の処理結果等を一時的に格納する。
【0032】
入力部49は、押しボタンスイッチ等のユーザインターフェースを具備して構成されており、作業者の入力操作に応じた指示信号を制御部52へ出力する。具体的には、入力部49は、例えば、内視鏡プローブ2の湾曲方向、内視鏡プローブ2の湾曲量、光学アダプタ部3から出射される照明光の光量、及び、挿入駆動部6の駆動状態等を変化させるための指示信号を、作業者の入力操作に応じて個別に生成して出力できるように構成されている。
【0033】
発音部50は、音声信号生成回路及びスピーカ等を具備して構成されており、制御部52の制御に応じた音声を発する。
【0034】
記録媒体51は、本体部4に着脱可能なメモリカード等により構成されており、制御部52から出力される画像ファイル等を記録する。
【0035】
制御部52は、CPU等を具備して構成されており、入力部49から出力される指示信号等に基づき、内視鏡装置1の各部に対する制御を行う。
【0036】
制御部52は、コーデック部44から出力される記録用の(動画または静止画の)画像データに対して後述のトレースデータを関連付けた画像ファイルを生成し、当該生成した画像ファイルを記録媒体51に記録させる。
【0037】
制御部52は、後述の処理の処理結果に基づき、後述のガイド情報を表示部46に表示させるための制御を画像処理部45に対して行う。
【0038】
挿入駆動部6は、例えば、内視鏡プローブ2の基端側の外部に装着された際に、ローラの回動動作により生じる駆動力に応じて内視鏡プローブ2を被観察物の内部に挿入及び抜去できるように構成されている。そして、このような挿入駆動部6の構成によれば、制御部52がローラの回動方向に関する制御を行うことにより、内視鏡プローブ2を挿入または抜去することができる。また、前述の挿入駆動部6の構成によれば、制御部52の制御に応じて内視鏡プローブ2を挿入軸(長手方向の軸)周りに回転させる(ひねる)ことができる。
【0039】
ここで、内視鏡装置1によりトレースデータを取得する際に行われる処理等について説明する。
【0040】
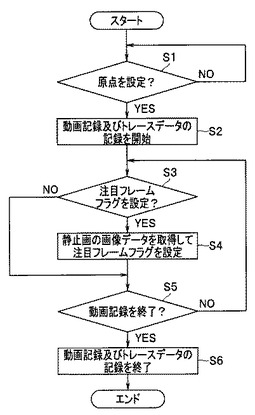
まず、トレースデータの取得を行いながら、挿入開始位置からの一連の動画の記録を行う場合の処理等について、図2を参照しつつ説明を行う。図2は、本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の一例を示すフローチャートである。
【0041】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置した後、例えば、入力部49の原点取得スイッチ(図示せず)を押下する。
【0042】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図2のステップS1)。
【0043】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0044】
また、制御部52は、図2のステップS1において、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0045】
なお、本実施例の制御部52は、図2のステップS1における原点の設定に関する処理が完了するまでは、図2のステップS2以降の処理を行わないものとする。
【0046】
一方、作業者は、例えば、入力部49の動画記録スイッチ(図示せず)をオンしてから、被観察物内への内視鏡プローブ2の挿入を開始する。
【0047】
制御部52は、入力部49の動画記録スイッチがオンされた際に出力される指示信号に基づき、コーデック部44から出力される記録用の動画の画像データをメモリ部48に順次記録させるとともに、当該動画の画像データの各フレームに対応するトレースデータの記録を開始する(図2のステップS2)。
【0048】
ここで、図2のステップS2において取得開始されるトレースデータの具体例について説明を行う。
【0049】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図2のステップS1において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。
【0050】
また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図2のステップS1において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているか、及び(または)、内視鏡プローブ2の先端部がどの程度回転しているかを示す姿勢データを随時算出する。
【0051】
そして、制御部52は、図2のステップS2の処理を行ってから後述の図2のステップS6の処理を行うまでの間、位置データ及び姿勢データの算出結果と、湾曲駆動部43がワイヤ23をどの程度牽引しているかを示す牽引長さデータと、計時部47の計測結果に応じた計時データと、を相互に関連付けたトレースデータを、コーデック部44により生成された記録用の動画の画像データが1フレーム分出力される毎に取得して記録媒体51に順次格納する。
【0052】
なお、制御部52は、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、前述の各データ(位置データ、姿勢データ、牽引長さデータ及び計時データ)に加え、挿入開始位置の長さを0とした場合の挿入長さを示す挿入長さデータ、及び、挿入開始位置の角度を0°とした場合のひねり角度を示すひねり角度データをさらに含むトレースデータを、コーデック部44から記録用の動画の画像データが1フレーム分出力される毎に取得して記録媒体51に順次格納する。
【0053】
さらに、作業者は、表示部46に表示されるリアルタイムの画像データを見ながら内視鏡プローブ2を被観察物内に挿入してゆき、当該被観察物内の傷等が存在する位置、及び、当該被観察物内の所定の検査位置の少なくともいずれか一方に内視鏡プローブ2の先端部が到達した場合において、例えば、入力部49の注目フレームフラグスイッチ(図示せず)をオンする。
【0054】
制御部52は、動画の画像データの記録及びトレースデータの取得を開始した後において、入力部49の注目フレームフラグスイッチから出力される指示信号に基づき、注目フレームフラグを設定するか否かを判定する(図2のステップS3)。
【0055】
制御部52は、入力部49の注目フレームフラグスイッチがオンされない場合には、注目フレームフラグを設定せずに、後述の図2のステップS5の処理を行う。また、制御部52は、入力部49の注目フレームフラグスイッチがオンされた場合には、当該スイッチがオンされた直後のタイミングにおいて、当該タイミングに相当するフレームの記録用の静止画の画像データをコーデック部44から取得するとともに、当該タイミングに相当するフレームのトレースデータに注目フレームフラグを設定する(図2のステップS4)。そして、制御部52は、前述のタイミングにおいて取得した静止画の画像データと、前述のタイミングにおいて注目フレームフラグを設定したトレースデータと、を関連付けた静止画の画像ファイルを生成し、当該生成した静止画の画像ファイルを記録媒体51に記録させる。
【0056】
作業者は、例えば、内視鏡プローブ2を被観察物内から抜去して検査を終了する際に、入力部49の動画記録スイッチをオフする。
【0057】
制御部52は、図2のステップS3またはステップS4の処理を経た後、入力部49の動画記録スイッチから出力される指示信号に基づき、動画の画像データの記録を終了するか否かを判定する(図2のステップS5)。
【0058】
制御部52は、入力部49の動画記録スイッチがオフされない場合には、図2のステップS3に戻り、入力部49の注目フレームフラグスイッチがオンされたか否かを再度判定する。また、制御部52は、入力部49の動画記録スイッチがオフされた場合には、動画記録スイッチがオフされた直後のタイミングにおいて、動画の画像データの記録及びトレースデータの記録を終了する(図2のステップS6)。
【0059】
すなわち、トレースデータの取得を行いながら、挿入開始位置からの一連の動画の記録を行う場合においては、注目フレームフラグが設定されたトレースデータをそれぞれ具備する1または複数の静止画の画像ファイルと、動画の画像データの各フレーム毎にトレースデータが関連付けられた動画の画像ファイルと、が記録媒体51に記録される。
【0060】
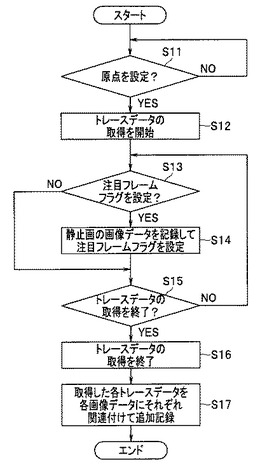
次に、トレースデータの取得を行いながら、所望の位置において静止画の記録を行う場合の処理等について、図3を参照しつつ説明を行う。図3は、本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の、図2とは異なる例を示すフローチャートである。
【0061】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置した後、例えば、入力部49の原点取得スイッチ(図示せず)を押下する。
【0062】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図3のステップS11)。
【0063】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0064】
また、制御部52は、図3のステップS11において、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0065】
なお、本実施例の制御部52は、図3のステップS11における原点の設定に関する処理が完了するまでは、図3のステップS12以降の処理を行わないものとする。
【0066】
一方、作業者は、例えば、入力部49のトレースデータ取得スイッチ(図示せず)をオンしてから、被観察物内への内視鏡プローブ2の挿入を開始する。
【0067】
制御部52は、入力部49のトレースデータ取得スイッチがオンされた際に出力される指示信号に基づき、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎にトレースデータを取得してメモリ部48に順次格納する(図3のステップS12)。
【0068】
すなわち、制御部52は、図2のステップS2の処理と略同様の処理を行うことにより、図3のステップS12の処理を行ってから後述の図3のステップS16の処理を行うまでの間、位置データ及び姿勢データの算出結果と、湾曲駆動部43がワイヤ23をどの程度牽引しているかを示す牽引長さデータと、計時部47の計測結果に応じた計時データと、を相互に関連付けたトレースデータを取得してメモリ部48に順次格納する。
【0069】
さらに、作業者は、表示部46に表示されるリアルタイムの画像データを見ながら内視鏡プローブ2を被観察物内に挿入してゆき、当該被観察物内の傷等が存在する位置、及び、当該被観察物内の所定の検査位置の少なくともいずれか一方に内視鏡プローブ2の先端部が到達した場合において、例えば、入力部49の静止画記録スイッチ(図示せず)または注目フレームフラグスイッチ(図示せず)のいずれかをオンする。
【0070】
制御部52は、トレースデータの取得を開始した後において、入力部49の静止画記録スイッチ及び注目フレームフラグスイッチから出力される指示信号に基づき、注目フレームフラグを設定するか否かを判定する(図3のステップS13)。
【0071】
制御部52は、入力部49の静止画記録スイッチ及び注目フレームフラグスイッチがいずれもオンされない場合には、注目フレームフラグを設定せずに、後述の図3のステップS15の処理を行う。また、制御部52は、入力部49の静止画記録スイッチまたは注目フレームフラグスイッチのいずれかがオンされた場合には、当該スイッチがオンされた直後のタイミングにおいて、当該タイミングに相当するフレームの記録用の静止画の画像データをコーデック部44から取得して記録媒体51に格納する(記録する)とともに、当該タイミングに相当するフレームのトレースデータに注目フレームフラグを設定する(図3のステップS14)。そして、制御部52は、前述のタイミングにおいて記録媒体51に格納した(記録した)静止画の画像データと、前述のタイミングにおいて注目フレームフラグを設定したトレースデータと、を関連付けた静止画の画像ファイルを生成し、当該生成した静止画の画像ファイルを記録媒体51に格納する。
【0072】
作業者は、例えば、内視鏡プローブ2を被観察物内から抜去して検査を終了する際に、入力部49のトレースデータ取得スイッチをオフする。
【0073】
制御部52は、図3のステップS13またはステップS14の処理を経た後、入力部49のトレースデータ取得スイッチから出力される指示信号に基づき、トレースデータの記録を終了するか否かを判定する(図3のステップS15)。
【0074】
制御部52は、入力部49のトレースデータ取得スイッチがオフされない場合には、図3のステップS13に戻り、入力部49の注目フレームフラグスイッチがオンされたか否かを再度判定する。また、制御部52は、入力部49のトレースデータ取得スイッチがオフされた場合には、当該スイッチがオフされた直後のタイミングにおいて、トレースデータの取得を終了する(図3のステップS16)。
【0075】
そして、制御部52は、図3のステップS16の処理を経た後、図3のステップS12の処理を行ってからステップS16の処理を行うまでの期間中にメモリ部48に格納された各トレースデータを、記録媒体51に格納された(記録された)静止画の各画像データにそれぞれ関連付けて追加記録させる(図3のステップS17)。
【0076】
すなわち、トレースデータの取得を行いながら、所望の位置において静止画の記録を行う場合においては、当該所望の位置を示す注目フレームフラグが設定されたトレースデータと、内視鏡プローブの挿入開始時から抜去完了時までに取得された各トレースデータと、をそれぞれ具備する1または複数の静止画の画像ファイルが記録媒体51に記録される。
【0077】
続いて、図2または図3に示すフローチャートの処理等に応じて予め取得されたトレースデータを用い、被観察物内へ内視鏡プローブ2を挿入してゆく際に行われる処理等について説明する。なお、以降においては、説明の簡単のため、図2または図3に示すフローチャートの処理等によりトレースデータを取得した際と同一の挿入開始位置から同一の被観察物内に内視鏡プローブ2を挿入してゆくような状況を例に挙げて述べる。
【0078】
まず、挿入駆動部6を用いずに内視鏡プローブ2を挿入してゆく場合の処理等について、図4及び図5を参照しつつ説明を行う。図4は、本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の一例を示すフローチャートである。
【0079】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、例えば、入力部49のトレースモードスイッチ(図示せず)をオンする。
【0080】
制御部52は、入力部49のトレースモードスイッチがオンされると、記録媒体51に記録された各画像ファイルの中から、注目フレームフラグが設定されたトレースデータを具備する静止画の画像ファイルを抽出する。そして、制御部52は、抽出した静止画の各画像ファイルに含まれる画像データを、1つずつまたは複数ずつ表示部46に表示させるための制御をコーデック部44及び画像処理部45に対して行う。
【0081】
作業者は、入力部49を操作することにより、表示部46に表示される静止画の各画像データの中から、内視鏡プローブ2の挿入先の目標位置に適合する目標位置画像データを1つ選択する。
【0082】
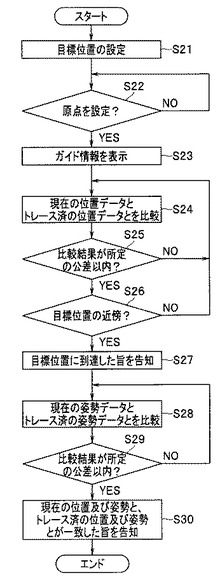
制御部52は、入力部49の操作により目標位置画像データが選択されると、当該目標位置画像データに関連付けられたトレースデータに含まれるトレース済の位置データに基づき、内視鏡プローブ2の挿入先の目標位置を設定する(図4のステップS21)。
【0083】
作業者は、目標位置画像データを選択した後、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置するとともに、内視鏡プローブ2の姿勢をトレースデータ記録時に合わせた状態で、例えば、入力部49の原点取得スイッチを押下する。
【0084】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図4のステップS22)。
【0085】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0086】
なお、本実施例の制御部52は、図4のステップS22における原点の設定に関する処理が完了するまでは、図4のステップS23以降の処理を行わないものとする。
【0087】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図4のステップS22において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図4のステップS22において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているかを示す姿勢データを随時算出する。
【0088】
そして、制御部52は、加速度センサ24からの加速度情報に基づいて算出した現在の位置データと、角速度センサ25からの角速度情報に基づいて算出した現在の姿勢データと、前述の目標位置画像データに関連付けられたトレースデータと、に基づき、作業者による内視鏡プローブ2の挿入操作を支援可能なガイド情報を表示部46に表示させるための制御を画像処理部45に対して行う(図4のステップS23)。
【0089】
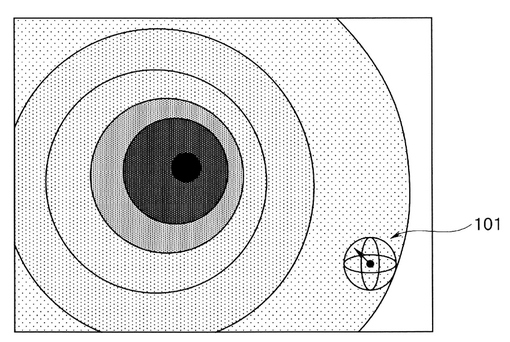
なお、表示部46に表示されるガイド情報は、例えば、現在の位置から目標位置へ向かう挿入方向、及び、現在の姿勢とトレース済の姿勢とのずれを視覚的に認識できるような態様を有するものであれば、文字列または画像のいずれであってもよい。図5は、表示部に表示されるガイド情報の一例を示す図である。
【0090】
具体的には、例えば図5に示すような、内視鏡プローブ2の挿入操作及び湾曲操作に伴って略リアルタイムに矢印の方向及び色等が変化する動的アイコン101を、前述のガイド情報として適用することができる。または、例えば、予め取得した被観察物の3D画像データに対し、現在の位置と、トレースデータに基づく挿入経路及び挿入時の姿勢と、を重畳したガイド用画像を、前述のガイド情報として適用することもできる。
【0091】
作業者は、表示部46に表示されるリアルタイムの画像データを見ながら、ガイド情報に従って挿入操作を行うことにより、内視鏡プローブ2を目標位置へ向けて挿入してゆく。
【0092】
一方、制御部52は、図4のステップS23の処理を行った後、加速度センサ24からの加速度情報に基づいて算出した現在の位置データの座標値と、トレース済の位置データの座標値と、を比較することにより比較結果を取得し(図4のステップS24)、当該比較結果が所定の公差以内であるか否かを判定する(図4のステップS25)。
【0093】
制御部52は、図4のステップS25において、図4のステップS24により得られた比較結果が所定の公差以内ではないとの判定結果を得た場合には、図4のステップS24に戻り、現在の位置データの座標値とトレース済の位置データの座標値との比較を再度行う。また、制御部52は、図4のステップS25において、図4のステップS24により得られた比較結果が所定の公差以内であるとの判定結果を得た場合には、さらに、この比較結果に基づき、現在の位置が目標位置の近傍であるか否かの判定を行う(図4のステップS26)。
【0094】
なお、図4のステップS24からステップS26までの処理は、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎に行われるものであってもよく、または、数秒に1回の間隔で行われるものであってもよい。
【0095】
制御部52は、図4のステップS26において、現在の位置が目標位置の近傍ではないとの判定結果を得た場合には、図4のステップS24に戻り、現在の位置データの座標値とトレース済の位置データの座標値との比較を再度行う。また、制御部52は、図4のステップS26において、現在の位置が目標位置の近傍であるとの判定結果を得た場合には、内視鏡プローブ2の先端部が目標位置に到達した旨を告知するための制御を行う(図4のステップS27)。
【0096】
具体的には、制御部52は、内視鏡プローブ2の先端部が目標位置に到達した旨に関する情報を、前述のガイド情報と併せて表示部46に表示させるための制御を画像処理部45に対して行う。
【0097】
なお、制御部52は、図4のステップS27において、例えば、光学アダプタ部3に設けられたメモリ(図示せず)からアダプタ識別情報を読み込むことにより、側視用の光学アダプタ部3が内視鏡プローブ2の先端部に接続されていることを検出した場合に、光学レンズ部32を適切な視野に合わせるように促す文字列等を表示部46に表示させるための制御をさらに行うものであってもよい。
【0098】
作業者は、表示部46において告知された情報に基づき、内視鏡プローブ2の先端部が目標位置に到達したことを認識すると、リアルタイムの画像データを見ながら入力部49を操作して内視鏡プローブ2を湾曲させる。
【0099】
制御部52は、図4のステップS27の処理を行った後、角速度センサ25から出力される角速度情報に基づいて算出した現在の姿勢データの座標値と、トレース済の姿勢データの座標値と、を比較することにより比較結果を取得し(図4のステップS28)、当該比較結果が所定の公差以内であるか否かを判定する(図4のステップS29)。
【0100】
制御部52は、図4のステップS29において、図4のステップS28により得られた比較結果が所定の公差以内ではないとの判定結果を得た場合には、図4のステップS28に戻り、現在の姿勢データの座標値とトレース済の姿勢データの座標値との比較を再度行う。また、制御部52は、図4のステップS29において、図4のステップS28により得られた比較結果が所定の公差以内であるとの判定結果を得た場合には、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨を告知するための制御を行う(図4のステップS30)。
【0101】
具体的には、制御部52は、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨に関する情報を前述のガイド情報と併せて表示部46に表示させるための制御を画像処理部45に対して行うとともに、当該情報を音声により伝えるための制御を発音部50に対して行う。
【0102】
作業者は、表示部46及び発音部50において告知された情報に基づき、目標位置における内視鏡プローブ2の先端部の姿勢がトレース済の姿勢と一致したことを認識すると、入力部49による内視鏡プローブ2の湾曲操作を停止し、リアルタイムの画像データに基づく被写体の検査を開始する。
【0103】
なお、制御部52は、図4のステップS30の処理を行った直後において、例えば、表示部46に表示される画像データをフリーズさせるための制御を行ってもよく、記録媒体51に静止画の画像データを記録させるための制御を行ってもよく、記録媒体51への動画の画像データの記録を開始させるための制御を行ってもよく、または、撮像部21により撮像されている被写体の計測に関する処理を行うように動作してもよい。
【0104】
また、制御部52は、図4のステップS30の処理を行った直後において、例えば、目標位置画像データ、または、目標位置画像データを含む動画の画像データのいずれかをリアルタイムの画像データに併せて再生表示させるための制御を行ってもよい。
【0105】
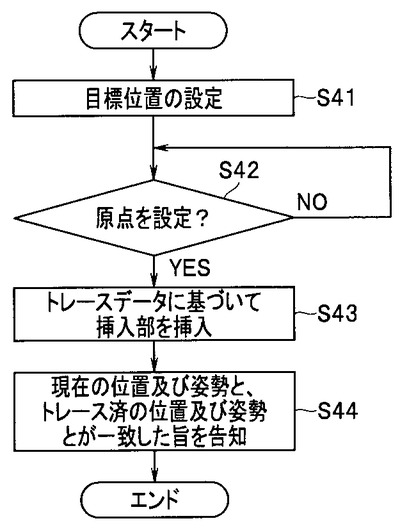
次に、挿入駆動部6を用いて内視鏡プローブ2を挿入してゆく場合の処理等について、図6を参照しつつ説明を行う。図6は、本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の、図4とは異なる例を示すフローチャートである。
【0106】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の基端側の外部に挿入駆動部6を装着し、入力部49のトレースモードスイッチをオンする。
【0107】
制御部52は、入力部49のトレースモードスイッチがオンされると、記録媒体51に記録された各画像ファイルの中から、注目フレームフラグが設定されたトレースデータを具備する静止画の画像ファイルを抽出する。そして、制御部52は、抽出した静止画の各画像ファイルに含まれる画像データを、1つずつまたは複数ずつ表示部46に表示させるための制御をコーデック部44及び画像処理部45に対して行う。
【0108】
作業者は、入力部49を操作することにより、表示部46に表示される各画像データの中から、内視鏡プローブ2の挿入先の目標位置に適合する目標位置画像データを1つ選択する。
【0109】
制御部52は、入力部49の操作により目標位置画像データが選択されると、当該目標位置画像データに関連付けられたトレースデータに含まれるトレース済の位置データに基づき、内視鏡プローブ2の挿入先の目標位置を設定する(図6のステップS41)。
【0110】
作業者は、目標位置画像データを選択した後、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置するとともに、内視鏡プローブ2の姿勢をトレースデータ記録時に合わせた状態で、例えば、入力部49の原点取得スイッチを押下する。
【0111】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図6のステップS42)。
【0112】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。また、制御部52は、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0113】
なお、本実施例の制御部52は、図6のステップS42における原点の設定に関する処理が完了するまでは、図6のステップS43以降の処理を行わないものとする。
【0114】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図6のステップS42において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図6のステップS42において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているか、及び(または)、内視鏡プローブ2の先端部がどの程度回転しているかを示す姿勢データを随時算出する。
【0115】
そして、制御部52は、目標位置画像データに関連付けられたトレースデータに基づいて挿入駆動部6及び湾曲駆動部43に対する制御を行うことにより、内視鏡プローブ2を被観察物内の目標位置に向けて挿入(及び湾曲)してゆく。(図6のステップS43)
具体的には、制御部52は、現在の位置データ、姿勢データ、牽引長さデータ、挿入長さデータ、及び、ひねり角度データの各データと、目標位置画像データに関連付けられたトレースデータに含まれる各データと、が相互に略一致した状態で内視鏡プローブ2が挿入(及び湾曲)されてゆくように、挿入駆動部6及び湾曲駆動部43に対する制御を行う。
【0116】
なお、制御部52は、図6のステップS43において、内視鏡プローブ2を被観察物内の目標位置へ向けて挿入してゆく際に、前述の動的アイコン101またはガイド用画像等のガイド情報を、リアルタイムの画像データに併せて表示部46に表示させるための制御を画像処理部45に対して行うものであってもよい。
【0117】
また、図6のステップS43の制御は、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎に行われるものであってもよく、または、数秒に1回の間隔で行われるものであってもよい。
【0118】
また、図6のステップS43の制御は、前述の各データを用いて内視鏡プローブ2を挿入(及び湾曲)してゆくものに限らず、例えば、現在の位置データ及び姿勢データと、目標位置画像データに関連付けられたトレースデータに含まれる位置データ及び姿勢データと、を相互に略一致させながら内視鏡プローブ2を挿入(及び湾曲)してゆくようなものであってもよい。
【0119】
また、図6のステップS43の制御は、前述の各データを用いて内視鏡プローブ2を挿入(及び湾曲)してゆくものに限らず、例えば、信号処理部41からリアルタイムに出力される各フレームの画像データと、目標位置画像データと、の間におけるマッチング処理を随時行うことにより、目標位置画像データと略同じ画像データが撮像されるまで内視鏡プローブ2を挿入(及び湾曲)してゆくようなものであってもよい。
【0120】
一方、制御部52は、図6のステップS43の挿入駆動部6及び湾曲駆動部43に対する制御が完了した際に、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨を告知するための制御を行う(図6のステップS44)。
【0121】
具体的には、制御部52は、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨に関する情報を表示部46に表示させるための制御を画像処理部45に対して行うとともに、当該情報を音声により伝えるための制御を発音部50に対して行う。
【0122】
作業者は、表示部46及び発音部50において告知された情報に基づき、内視鏡プローブ2の挿入が完了したことを認識すると、リアルタイムの画像データに基づく被写体の検査を開始する。
【0123】
なお、制御部52は、図6のステップS44の処理を行った直後において、例えば、表示部46に表示される画像データをフリーズさせるための制御を行ってもよく、記録媒体51に静止画の画像データを記録させるための制御を行ってもよく、記録媒体51への動画の画像データの記録を開始させるための制御を行ってもよく、または、撮像部21により撮像されている被写体の計測に関する処理を行うように動作してもよい。
【0124】
また、制御部52は、図6のステップS44の処理を行った直後において、例えば、目標位置画像データ、または、目標位置画像データを含む動画の画像データのいずれかをリアルタイムの画像データに併せて再生表示させるための制御を行ってもよい。
【0125】
以上に述べたように、本実施例によれば、リアルタイムの画像データまたは記録用画像データの各フレームに対応するトレースデータを取得し、当該取得したトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆくことができる。その結果、本実施例によれば、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性が向上し、内視鏡プローブの挿入操作に要する時間を短縮させることができる。
【0126】
なお、本実施例によれば、少なくとも位置データがトレースデータに含まれる限りにおいては、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を十分に確保することができる。そのため、本実施例によれば、図2または図3に示すフローチャートの処理等において、例えば、姿勢データ、牽引長さデータ、及び、計時データのうちの少なくともいずれか1つのデータと、位置データと、からなるトレースデータが取得されるものであってよい。
【0127】
また、本実施例のトレースデータは、信号処理部41において生成された画像データが出力されるタイミング、または、コーデック部44において生成された記録用の画像データが出力されるタイミングのいずれかに基づいて取得されるものである限りにおいては、1フレーム分の画像データ(または記録用の画像データ)が出力されるタイミング毎に取得される(記録される)ものでなくともよい。具体的には、本実施例のトレースデータは、例えば、信号処理部41またはコーデック部44から所定の複数フレーム分の画像データが出力されるタイミング毎に取得されるものであってもよく、信号処理部41またはコーデック部44から1フレーム分の画像データが出力されるタイミングに近いタイミングにおいて一定時間毎に取得されるものであってもよい。
【0128】
本発明は、上述した実施例に限定されるものではなく、発明の趣旨を逸脱しない範囲内において種々の変更や応用が可能であることは勿論である。
【0129】
[付記]
付記項1
被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、
前記先端部の変位量を検出する変位量検出部と、
前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、
前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、
前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを、前記信号処理部において生成された前記画像データが出力されるタイミング、または、前記記録用画像生成部において生成された前記記録用の画像データが出力されるタイミングのいずれかに基づいて取得するトレースデータ取得部と、
前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、
を有することを特徴とする内視鏡装置。
【0130】
付記項2
前記トレースデータは、前記被観察物内の注目位置を示すフラグが設定された状態で前記記録媒体に記録されることを特徴とする付記項1に記載の内視鏡装置。
【0131】
付記項3
前記フラグが設定された状態で前記記録媒体に記録されたトレースデータを用いて前記内視鏡プローブを前記被観察物内に挿入してゆく場合において、前記先端部が前記注目位置に到達したことを告知するための情報が表示部に表示されることを特徴とする付記項2に記載の内視鏡装置。
【0132】
付記項4
前記記録媒体に記録されたトレースデータを用いて前記内視鏡プローブを前記被観察物内に挿入してゆく場合において、前記内視鏡プローブの挿入操作を支援可能なガイド情報が表示部に表示されることを特徴とする付記項1に記載の内視鏡装置。
【符号の説明】
【0133】
1 内視鏡装置
2 内視鏡プローブ
3 光学アダプタ部
4 本体部
6 挿入駆動部
21 撮像部
24 加速度センサ
25 角速度センサ
41 信号処理部
45 画像処理部
46 表示部
49 入力部
51 記録媒体
52 制御部
【先行技術文献】
【特許文献】
【0134】
【特許文献1】特開2005−338551号公報
【技術分野】
【0001】
本発明は、内視鏡装置に関し、特に、被観察物の内部の観察を行うことが可能な内視鏡装置に関するものである。
【背景技術】
【0002】
工業用分野の内視鏡装置は、例えば、工場の配管等の被観察物に対する検査の際に広く用いられている。そして、このような工業用分野の内視鏡装置としては、例えば、特許文献1のようなものが広く知られている。
【0003】
具体的には、特許文献1には、撮像手段を有し被観察物内に挿入される内視鏡プローブと、該内視鏡プローブの撮像手段で撮像した映像を表示する表示部とを備えた工業用内視鏡装置において、前記内視鏡プローブの先端部の変位量を検出するセンサと、そのセンサの検出値を基に内視鏡プローブの先端部の位置または姿勢の少なくとも一方を求める制御部と、を設けた構成が開示されている。
【0004】
そして、前述の特許文献1の構成によれば、被観察物内の挿入予定経路に沿って予め設定された各ランドマークを順番に通過するように内視鏡プローブを挿入してゆくことにより、内視鏡プローブの先端部を検査位置に到達させることができる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、前述した特許文献1の構成によれば、実際の被観察物内の各ランドマーク間を結ぶ挿入経路においては、作業者の経験または記憶に頼りながら内視鏡プローブの挿入を行わざるを得ない。そのため、前述した特許文献1の構成によれば、内視鏡プローブを被観察物内の検査位置へ挿入してゆく過程における挿入状態の再現性が低く、結果的に、内視鏡プローブの先端部を検査位置に到達させるまでに時間を要してしまう、という課題が生じている。
【0006】
本発明は、前述した事情に鑑みてなされたものであり、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を向上させることにより、内視鏡プローブの挿入操作に要する時間を短縮させることが可能な内視鏡装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の一態様の内視鏡装置は、被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、前記先端部の変位量を検出する変位量検出部と、前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを取得するトレースデータ取得部と、前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、を有する。
【発明の効果】
【0008】
本発明における内視鏡装置によれば、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を向上させることにより、内視鏡プローブの挿入操作に要する時間を短縮させることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る内視鏡装置の要部の構成を示すブロック図。
【図2】本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の一例を示すフローチャート。
【図3】本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の、図2とは異なる例を示すフローチャート。
【図4】本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の一例を示すフローチャート。
【図5】表示部に表示されるガイド情報の一例を示す図。
【図6】本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の、図4とは異なる例を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面を参照しつつ説明を行う。
【0011】
図1から図6は、本発明の実施例に係るものである。
【0012】
図1は、本発明の実施例に係る内視鏡装置の要部の構成を示すブロック図である。
【0013】
内視鏡装置1は、図1に示すように、管体等の被観察物の内部に挿入可能な細長形状を具備する内視鏡プローブ2と、内視鏡プローブ2の先端部に着脱可能な形状等を具備する光学アダプタ部3と、内視鏡プローブ2の基端部に接続される本体部4と、内視鏡プローブ2の基端側の外部に着脱可能な形状等を具備する挿入駆動部6と、を有している。
【0014】
内視鏡プローブ2は、図1に示すように、撮像部21と、湾曲コマ22と、ワイヤ23と、加速度センサ24と、角速度センサ25と、を有している。
【0015】
撮像部21は、内視鏡プローブ2の先端部に設けられており、撮像素子等を具備して構成されている。また、撮像部21は、光学アダプタ部3の視野領域内の被写体を撮像し、当該撮像した被写体に応じた撮像信号を生成して本体部4へ出力する。
【0016】
湾曲コマ22は、内視鏡プローブ2の先端側の内部に1つ以上設けられており、ワイヤ23の張力に応じて回動することにより、内視鏡プローブ2を湾曲させることができるように構成されている。
【0017】
ワイヤ23は、内視鏡プローブ2の内部に1本以上挿通されており、一端側が湾曲コマ22に接続されているとともに、他端側が本体部4に接続されている。そのため、本体部4から出力される湾曲駆動信号に応じてワイヤ23が緊張または弛緩するに伴い、湾曲コマ22を回動させるための張力が変化する。
【0018】
加速度センサ24は、内視鏡プローブ2の先端部の変位量に相当する内視鏡プローブ2の先端部の3軸方向の加速度を随時検出し、当該検出した3軸方向の加速度を加速度情報として本体部4へ出力する。
【0019】
角速度センサ25は、内視鏡プローブ2の先端部の変位量に相当する内視鏡プローブ2の先端部の3軸方向の角速度を随時検出し、当該検出した3軸方向の角速度を角速度情報として本体部4へ出力する。
【0020】
光学アダプタ部3は、図1に示すように、照明部31と、光学レンズ部32と、を有している。
【0021】
照明部31は、1つ以上のLED等を具備して構成されており、本体部4から出力される照明駆動信号に応じて照明光を出射するように構成されている。
【0022】
光学レンズ部32は、1つ以上のレンズを具備して構成されており、照明部31から出射された照明光の反射光を撮像部21に集光できるように構成されている。
【0023】
本体部4は、図1に示すように、信号処理部41と、照明駆動部42と、湾曲駆動部43と、コーデック部44と、画像処理部45と、表示部46と、計時部47と、メモリ部48と、入力部49と、発音部50と、記録媒体51と、制御部52と、を有している。
【0024】
信号処理部41は、内視鏡プローブ2の撮像部21から出力される撮像信号に対してA/D変換及びノイズ除去等の信号処理を施すことにより、デジタルの画像データを生成してコーデック部44及び画像処理部45へ出力する。
【0025】
照明駆動部42は、制御部52の制御に基づき、照明部31を駆動させるための照明駆動信号を生成して出力する。
【0026】
湾曲駆動部43は、制御部52の制御に基づき、ワイヤ23の牽引長さを変化させることによりワイヤ23を緊張または弛緩させるための湾曲駆動信号を生成して出力する。なお、前述の牽引長さは、例えば、内視鏡プローブ2の先端部をいずれの方向にも湾曲させていない状態を0とした場合の相対的な値として設定される。
【0027】
コーデック部44は、信号処理部41からリアルタイムに出力される画像データに対し、所定のフォーマットに基づく圧縮処理等を施して得られた記録用の(動画または静止画の)画像データを制御部52経由で記録媒体51に書き込む。また、コーデック部44は、制御部52により記録媒体51から読み込まれた(動画または静止画の)画像ファイルに対し、所定のフォーマットに基づく伸長処理等を施す。
【0028】
画像処理部45は、信号処理部41からリアルタイムに出力される画像データと、コーデック部44による処理後の画像データと、に基づき、これら2つの画像データを合成する合成処理、または、これら2つの画像データの中から一方を選択する選択処理を行う。また、画像処理部45は、前述の合成処理または選択処理により得られた画像データに対し、文字等のグラフィックデータを重畳する重畳処理、及び、表示部46に適合する画像処理を施して表示部46へ出力する。さらに、画像処理部45は、制御部52の制御に基づき、後述のガイド情報を生成して表示部46に表示させる。
【0029】
表示部46は、LCD(液晶ディスプレイ)等を具備して構成されており、画像処理部45から出力される画像データ等を表示する。
【0030】
計時部47は、RTC(リアルタイムクロック)等を具備して構成されており、現在の日時及び時刻を計測して得られた計時データを制御部52へ出力する。
【0031】
メモリ部48は、RAM等を具備して構成されており、制御部52の演算処理の処理結果等を一時的に格納する。
【0032】
入力部49は、押しボタンスイッチ等のユーザインターフェースを具備して構成されており、作業者の入力操作に応じた指示信号を制御部52へ出力する。具体的には、入力部49は、例えば、内視鏡プローブ2の湾曲方向、内視鏡プローブ2の湾曲量、光学アダプタ部3から出射される照明光の光量、及び、挿入駆動部6の駆動状態等を変化させるための指示信号を、作業者の入力操作に応じて個別に生成して出力できるように構成されている。
【0033】
発音部50は、音声信号生成回路及びスピーカ等を具備して構成されており、制御部52の制御に応じた音声を発する。
【0034】
記録媒体51は、本体部4に着脱可能なメモリカード等により構成されており、制御部52から出力される画像ファイル等を記録する。
【0035】
制御部52は、CPU等を具備して構成されており、入力部49から出力される指示信号等に基づき、内視鏡装置1の各部に対する制御を行う。
【0036】
制御部52は、コーデック部44から出力される記録用の(動画または静止画の)画像データに対して後述のトレースデータを関連付けた画像ファイルを生成し、当該生成した画像ファイルを記録媒体51に記録させる。
【0037】
制御部52は、後述の処理の処理結果に基づき、後述のガイド情報を表示部46に表示させるための制御を画像処理部45に対して行う。
【0038】
挿入駆動部6は、例えば、内視鏡プローブ2の基端側の外部に装着された際に、ローラの回動動作により生じる駆動力に応じて内視鏡プローブ2を被観察物の内部に挿入及び抜去できるように構成されている。そして、このような挿入駆動部6の構成によれば、制御部52がローラの回動方向に関する制御を行うことにより、内視鏡プローブ2を挿入または抜去することができる。また、前述の挿入駆動部6の構成によれば、制御部52の制御に応じて内視鏡プローブ2を挿入軸(長手方向の軸)周りに回転させる(ひねる)ことができる。
【0039】
ここで、内視鏡装置1によりトレースデータを取得する際に行われる処理等について説明する。
【0040】
まず、トレースデータの取得を行いながら、挿入開始位置からの一連の動画の記録を行う場合の処理等について、図2を参照しつつ説明を行う。図2は、本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の一例を示すフローチャートである。
【0041】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置した後、例えば、入力部49の原点取得スイッチ(図示せず)を押下する。
【0042】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図2のステップS1)。
【0043】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0044】
また、制御部52は、図2のステップS1において、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0045】
なお、本実施例の制御部52は、図2のステップS1における原点の設定に関する処理が完了するまでは、図2のステップS2以降の処理を行わないものとする。
【0046】
一方、作業者は、例えば、入力部49の動画記録スイッチ(図示せず)をオンしてから、被観察物内への内視鏡プローブ2の挿入を開始する。
【0047】
制御部52は、入力部49の動画記録スイッチがオンされた際に出力される指示信号に基づき、コーデック部44から出力される記録用の動画の画像データをメモリ部48に順次記録させるとともに、当該動画の画像データの各フレームに対応するトレースデータの記録を開始する(図2のステップS2)。
【0048】
ここで、図2のステップS2において取得開始されるトレースデータの具体例について説明を行う。
【0049】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図2のステップS1において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。
【0050】
また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図2のステップS1において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているか、及び(または)、内視鏡プローブ2の先端部がどの程度回転しているかを示す姿勢データを随時算出する。
【0051】
そして、制御部52は、図2のステップS2の処理を行ってから後述の図2のステップS6の処理を行うまでの間、位置データ及び姿勢データの算出結果と、湾曲駆動部43がワイヤ23をどの程度牽引しているかを示す牽引長さデータと、計時部47の計測結果に応じた計時データと、を相互に関連付けたトレースデータを、コーデック部44により生成された記録用の動画の画像データが1フレーム分出力される毎に取得して記録媒体51に順次格納する。
【0052】
なお、制御部52は、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、前述の各データ(位置データ、姿勢データ、牽引長さデータ及び計時データ)に加え、挿入開始位置の長さを0とした場合の挿入長さを示す挿入長さデータ、及び、挿入開始位置の角度を0°とした場合のひねり角度を示すひねり角度データをさらに含むトレースデータを、コーデック部44から記録用の動画の画像データが1フレーム分出力される毎に取得して記録媒体51に順次格納する。
【0053】
さらに、作業者は、表示部46に表示されるリアルタイムの画像データを見ながら内視鏡プローブ2を被観察物内に挿入してゆき、当該被観察物内の傷等が存在する位置、及び、当該被観察物内の所定の検査位置の少なくともいずれか一方に内視鏡プローブ2の先端部が到達した場合において、例えば、入力部49の注目フレームフラグスイッチ(図示せず)をオンする。
【0054】
制御部52は、動画の画像データの記録及びトレースデータの取得を開始した後において、入力部49の注目フレームフラグスイッチから出力される指示信号に基づき、注目フレームフラグを設定するか否かを判定する(図2のステップS3)。
【0055】
制御部52は、入力部49の注目フレームフラグスイッチがオンされない場合には、注目フレームフラグを設定せずに、後述の図2のステップS5の処理を行う。また、制御部52は、入力部49の注目フレームフラグスイッチがオンされた場合には、当該スイッチがオンされた直後のタイミングにおいて、当該タイミングに相当するフレームの記録用の静止画の画像データをコーデック部44から取得するとともに、当該タイミングに相当するフレームのトレースデータに注目フレームフラグを設定する(図2のステップS4)。そして、制御部52は、前述のタイミングにおいて取得した静止画の画像データと、前述のタイミングにおいて注目フレームフラグを設定したトレースデータと、を関連付けた静止画の画像ファイルを生成し、当該生成した静止画の画像ファイルを記録媒体51に記録させる。
【0056】
作業者は、例えば、内視鏡プローブ2を被観察物内から抜去して検査を終了する際に、入力部49の動画記録スイッチをオフする。
【0057】
制御部52は、図2のステップS3またはステップS4の処理を経た後、入力部49の動画記録スイッチから出力される指示信号に基づき、動画の画像データの記録を終了するか否かを判定する(図2のステップS5)。
【0058】
制御部52は、入力部49の動画記録スイッチがオフされない場合には、図2のステップS3に戻り、入力部49の注目フレームフラグスイッチがオンされたか否かを再度判定する。また、制御部52は、入力部49の動画記録スイッチがオフされた場合には、動画記録スイッチがオフされた直後のタイミングにおいて、動画の画像データの記録及びトレースデータの記録を終了する(図2のステップS6)。
【0059】
すなわち、トレースデータの取得を行いながら、挿入開始位置からの一連の動画の記録を行う場合においては、注目フレームフラグが設定されたトレースデータをそれぞれ具備する1または複数の静止画の画像ファイルと、動画の画像データの各フレーム毎にトレースデータが関連付けられた動画の画像ファイルと、が記録媒体51に記録される。
【0060】
次に、トレースデータの取得を行いながら、所望の位置において静止画の記録を行う場合の処理等について、図3を参照しつつ説明を行う。図3は、本実施例の内視鏡装置において、トレースデータを取得する際に行われる処理等の、図2とは異なる例を示すフローチャートである。
【0061】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置した後、例えば、入力部49の原点取得スイッチ(図示せず)を押下する。
【0062】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図3のステップS11)。
【0063】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0064】
また、制御部52は、図3のステップS11において、挿入駆動部6が内視鏡プローブ2に装着されていることを検出した場合には、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0065】
なお、本実施例の制御部52は、図3のステップS11における原点の設定に関する処理が完了するまでは、図3のステップS12以降の処理を行わないものとする。
【0066】
一方、作業者は、例えば、入力部49のトレースデータ取得スイッチ(図示せず)をオンしてから、被観察物内への内視鏡プローブ2の挿入を開始する。
【0067】
制御部52は、入力部49のトレースデータ取得スイッチがオンされた際に出力される指示信号に基づき、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎にトレースデータを取得してメモリ部48に順次格納する(図3のステップS12)。
【0068】
すなわち、制御部52は、図2のステップS2の処理と略同様の処理を行うことにより、図3のステップS12の処理を行ってから後述の図3のステップS16の処理を行うまでの間、位置データ及び姿勢データの算出結果と、湾曲駆動部43がワイヤ23をどの程度牽引しているかを示す牽引長さデータと、計時部47の計測結果に応じた計時データと、を相互に関連付けたトレースデータを取得してメモリ部48に順次格納する。
【0069】
さらに、作業者は、表示部46に表示されるリアルタイムの画像データを見ながら内視鏡プローブ2を被観察物内に挿入してゆき、当該被観察物内の傷等が存在する位置、及び、当該被観察物内の所定の検査位置の少なくともいずれか一方に内視鏡プローブ2の先端部が到達した場合において、例えば、入力部49の静止画記録スイッチ(図示せず)または注目フレームフラグスイッチ(図示せず)のいずれかをオンする。
【0070】
制御部52は、トレースデータの取得を開始した後において、入力部49の静止画記録スイッチ及び注目フレームフラグスイッチから出力される指示信号に基づき、注目フレームフラグを設定するか否かを判定する(図3のステップS13)。
【0071】
制御部52は、入力部49の静止画記録スイッチ及び注目フレームフラグスイッチがいずれもオンされない場合には、注目フレームフラグを設定せずに、後述の図3のステップS15の処理を行う。また、制御部52は、入力部49の静止画記録スイッチまたは注目フレームフラグスイッチのいずれかがオンされた場合には、当該スイッチがオンされた直後のタイミングにおいて、当該タイミングに相当するフレームの記録用の静止画の画像データをコーデック部44から取得して記録媒体51に格納する(記録する)とともに、当該タイミングに相当するフレームのトレースデータに注目フレームフラグを設定する(図3のステップS14)。そして、制御部52は、前述のタイミングにおいて記録媒体51に格納した(記録した)静止画の画像データと、前述のタイミングにおいて注目フレームフラグを設定したトレースデータと、を関連付けた静止画の画像ファイルを生成し、当該生成した静止画の画像ファイルを記録媒体51に格納する。
【0072】
作業者は、例えば、内視鏡プローブ2を被観察物内から抜去して検査を終了する際に、入力部49のトレースデータ取得スイッチをオフする。
【0073】
制御部52は、図3のステップS13またはステップS14の処理を経た後、入力部49のトレースデータ取得スイッチから出力される指示信号に基づき、トレースデータの記録を終了するか否かを判定する(図3のステップS15)。
【0074】
制御部52は、入力部49のトレースデータ取得スイッチがオフされない場合には、図3のステップS13に戻り、入力部49の注目フレームフラグスイッチがオンされたか否かを再度判定する。また、制御部52は、入力部49のトレースデータ取得スイッチがオフされた場合には、当該スイッチがオフされた直後のタイミングにおいて、トレースデータの取得を終了する(図3のステップS16)。
【0075】
そして、制御部52は、図3のステップS16の処理を経た後、図3のステップS12の処理を行ってからステップS16の処理を行うまでの期間中にメモリ部48に格納された各トレースデータを、記録媒体51に格納された(記録された)静止画の各画像データにそれぞれ関連付けて追加記録させる(図3のステップS17)。
【0076】
すなわち、トレースデータの取得を行いながら、所望の位置において静止画の記録を行う場合においては、当該所望の位置を示す注目フレームフラグが設定されたトレースデータと、内視鏡プローブの挿入開始時から抜去完了時までに取得された各トレースデータと、をそれぞれ具備する1または複数の静止画の画像ファイルが記録媒体51に記録される。
【0077】
続いて、図2または図3に示すフローチャートの処理等に応じて予め取得されたトレースデータを用い、被観察物内へ内視鏡プローブ2を挿入してゆく際に行われる処理等について説明する。なお、以降においては、説明の簡単のため、図2または図3に示すフローチャートの処理等によりトレースデータを取得した際と同一の挿入開始位置から同一の被観察物内に内視鏡プローブ2を挿入してゆくような状況を例に挙げて述べる。
【0078】
まず、挿入駆動部6を用いずに内視鏡プローブ2を挿入してゆく場合の処理等について、図4及び図5を参照しつつ説明を行う。図4は、本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の一例を示すフローチャートである。
【0079】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、例えば、入力部49のトレースモードスイッチ(図示せず)をオンする。
【0080】
制御部52は、入力部49のトレースモードスイッチがオンされると、記録媒体51に記録された各画像ファイルの中から、注目フレームフラグが設定されたトレースデータを具備する静止画の画像ファイルを抽出する。そして、制御部52は、抽出した静止画の各画像ファイルに含まれる画像データを、1つずつまたは複数ずつ表示部46に表示させるための制御をコーデック部44及び画像処理部45に対して行う。
【0081】
作業者は、入力部49を操作することにより、表示部46に表示される静止画の各画像データの中から、内視鏡プローブ2の挿入先の目標位置に適合する目標位置画像データを1つ選択する。
【0082】
制御部52は、入力部49の操作により目標位置画像データが選択されると、当該目標位置画像データに関連付けられたトレースデータに含まれるトレース済の位置データに基づき、内視鏡プローブ2の挿入先の目標位置を設定する(図4のステップS21)。
【0083】
作業者は、目標位置画像データを選択した後、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置するとともに、内視鏡プローブ2の姿勢をトレースデータ記録時に合わせた状態で、例えば、入力部49の原点取得スイッチを押下する。
【0084】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図4のステップS22)。
【0085】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。
【0086】
なお、本実施例の制御部52は、図4のステップS22における原点の設定に関する処理が完了するまでは、図4のステップS23以降の処理を行わないものとする。
【0087】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図4のステップS22において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図4のステップS22において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているかを示す姿勢データを随時算出する。
【0088】
そして、制御部52は、加速度センサ24からの加速度情報に基づいて算出した現在の位置データと、角速度センサ25からの角速度情報に基づいて算出した現在の姿勢データと、前述の目標位置画像データに関連付けられたトレースデータと、に基づき、作業者による内視鏡プローブ2の挿入操作を支援可能なガイド情報を表示部46に表示させるための制御を画像処理部45に対して行う(図4のステップS23)。
【0089】
なお、表示部46に表示されるガイド情報は、例えば、現在の位置から目標位置へ向かう挿入方向、及び、現在の姿勢とトレース済の姿勢とのずれを視覚的に認識できるような態様を有するものであれば、文字列または画像のいずれであってもよい。図5は、表示部に表示されるガイド情報の一例を示す図である。
【0090】
具体的には、例えば図5に示すような、内視鏡プローブ2の挿入操作及び湾曲操作に伴って略リアルタイムに矢印の方向及び色等が変化する動的アイコン101を、前述のガイド情報として適用することができる。または、例えば、予め取得した被観察物の3D画像データに対し、現在の位置と、トレースデータに基づく挿入経路及び挿入時の姿勢と、を重畳したガイド用画像を、前述のガイド情報として適用することもできる。
【0091】
作業者は、表示部46に表示されるリアルタイムの画像データを見ながら、ガイド情報に従って挿入操作を行うことにより、内視鏡プローブ2を目標位置へ向けて挿入してゆく。
【0092】
一方、制御部52は、図4のステップS23の処理を行った後、加速度センサ24からの加速度情報に基づいて算出した現在の位置データの座標値と、トレース済の位置データの座標値と、を比較することにより比較結果を取得し(図4のステップS24)、当該比較結果が所定の公差以内であるか否かを判定する(図4のステップS25)。
【0093】
制御部52は、図4のステップS25において、図4のステップS24により得られた比較結果が所定の公差以内ではないとの判定結果を得た場合には、図4のステップS24に戻り、現在の位置データの座標値とトレース済の位置データの座標値との比較を再度行う。また、制御部52は、図4のステップS25において、図4のステップS24により得られた比較結果が所定の公差以内であるとの判定結果を得た場合には、さらに、この比較結果に基づき、現在の位置が目標位置の近傍であるか否かの判定を行う(図4のステップS26)。
【0094】
なお、図4のステップS24からステップS26までの処理は、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎に行われるものであってもよく、または、数秒に1回の間隔で行われるものであってもよい。
【0095】
制御部52は、図4のステップS26において、現在の位置が目標位置の近傍ではないとの判定結果を得た場合には、図4のステップS24に戻り、現在の位置データの座標値とトレース済の位置データの座標値との比較を再度行う。また、制御部52は、図4のステップS26において、現在の位置が目標位置の近傍であるとの判定結果を得た場合には、内視鏡プローブ2の先端部が目標位置に到達した旨を告知するための制御を行う(図4のステップS27)。
【0096】
具体的には、制御部52は、内視鏡プローブ2の先端部が目標位置に到達した旨に関する情報を、前述のガイド情報と併せて表示部46に表示させるための制御を画像処理部45に対して行う。
【0097】
なお、制御部52は、図4のステップS27において、例えば、光学アダプタ部3に設けられたメモリ(図示せず)からアダプタ識別情報を読み込むことにより、側視用の光学アダプタ部3が内視鏡プローブ2の先端部に接続されていることを検出した場合に、光学レンズ部32を適切な視野に合わせるように促す文字列等を表示部46に表示させるための制御をさらに行うものであってもよい。
【0098】
作業者は、表示部46において告知された情報に基づき、内視鏡プローブ2の先端部が目標位置に到達したことを認識すると、リアルタイムの画像データを見ながら入力部49を操作して内視鏡プローブ2を湾曲させる。
【0099】
制御部52は、図4のステップS27の処理を行った後、角速度センサ25から出力される角速度情報に基づいて算出した現在の姿勢データの座標値と、トレース済の姿勢データの座標値と、を比較することにより比較結果を取得し(図4のステップS28)、当該比較結果が所定の公差以内であるか否かを判定する(図4のステップS29)。
【0100】
制御部52は、図4のステップS29において、図4のステップS28により得られた比較結果が所定の公差以内ではないとの判定結果を得た場合には、図4のステップS28に戻り、現在の姿勢データの座標値とトレース済の姿勢データの座標値との比較を再度行う。また、制御部52は、図4のステップS29において、図4のステップS28により得られた比較結果が所定の公差以内であるとの判定結果を得た場合には、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨を告知するための制御を行う(図4のステップS30)。
【0101】
具体的には、制御部52は、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨に関する情報を前述のガイド情報と併せて表示部46に表示させるための制御を画像処理部45に対して行うとともに、当該情報を音声により伝えるための制御を発音部50に対して行う。
【0102】
作業者は、表示部46及び発音部50において告知された情報に基づき、目標位置における内視鏡プローブ2の先端部の姿勢がトレース済の姿勢と一致したことを認識すると、入力部49による内視鏡プローブ2の湾曲操作を停止し、リアルタイムの画像データに基づく被写体の検査を開始する。
【0103】
なお、制御部52は、図4のステップS30の処理を行った直後において、例えば、表示部46に表示される画像データをフリーズさせるための制御を行ってもよく、記録媒体51に静止画の画像データを記録させるための制御を行ってもよく、記録媒体51への動画の画像データの記録を開始させるための制御を行ってもよく、または、撮像部21により撮像されている被写体の計測に関する処理を行うように動作してもよい。
【0104】
また、制御部52は、図4のステップS30の処理を行った直後において、例えば、目標位置画像データ、または、目標位置画像データを含む動画の画像データのいずれかをリアルタイムの画像データに併せて再生表示させるための制御を行ってもよい。
【0105】
次に、挿入駆動部6を用いて内視鏡プローブ2を挿入してゆく場合の処理等について、図6を参照しつつ説明を行う。図6は、本実施例の内視鏡装置において、予め取得されたトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆく際に行われる処理等の、図4とは異なる例を示すフローチャートである。
【0106】
作業者は、内視鏡プローブ2を被観察物内に挿入する前に、内視鏡プローブ2の基端側の外部に挿入駆動部6を装着し、入力部49のトレースモードスイッチをオンする。
【0107】
制御部52は、入力部49のトレースモードスイッチがオンされると、記録媒体51に記録された各画像ファイルの中から、注目フレームフラグが設定されたトレースデータを具備する静止画の画像ファイルを抽出する。そして、制御部52は、抽出した静止画の各画像ファイルに含まれる画像データを、1つずつまたは複数ずつ表示部46に表示させるための制御をコーデック部44及び画像処理部45に対して行う。
【0108】
作業者は、入力部49を操作することにより、表示部46に表示される各画像データの中から、内視鏡プローブ2の挿入先の目標位置に適合する目標位置画像データを1つ選択する。
【0109】
制御部52は、入力部49の操作により目標位置画像データが選択されると、当該目標位置画像データに関連付けられたトレースデータに含まれるトレース済の位置データに基づき、内視鏡プローブ2の挿入先の目標位置を設定する(図6のステップS41)。
【0110】
作業者は、目標位置画像データを選択した後、内視鏡プローブ2の先端部を被観察物の挿入開始位置に配置するとともに、内視鏡プローブ2の姿勢をトレースデータ記録時に合わせた状態で、例えば、入力部49の原点取得スイッチを押下する。
【0111】
制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定する(図6のステップS42)。
【0112】
具体的には、制御部52は、入力部49の原点取得スイッチの操作に応じて出力される指示信号に基づき、挿入開始位置における位置データ及び姿勢データの座標値をそれぞれ(0,0,0)に設定する。また、制御部52は、加速度センサ24及び角速度センサ25の原点を挿入開始位置に設定するとともに、挿入駆動部6による挿入長さを0に設定し、挿入駆動部6によるねじり角度を0°に設定する。
【0113】
なお、本実施例の制御部52は、図6のステップS42における原点の設定に関する処理が完了するまでは、図6のステップS43以降の処理を行わないものとする。
【0114】
制御部52は、加速度センサ24から出力される加速度情報に基づき、図6のステップS42において設定した原点に対し、内視鏡プローブ2の先端部が被観察物内のどの位置にあるかを示す位置データを随時算出する。また、制御部52は、角速度センサ25から出力される角速度情報に基づき、図6のステップS42において設定した原点に対し、内視鏡プローブ2の先端部がどのような方向に湾曲しているか、及び(または)、内視鏡プローブ2の先端部がどの程度回転しているかを示す姿勢データを随時算出する。
【0115】
そして、制御部52は、目標位置画像データに関連付けられたトレースデータに基づいて挿入駆動部6及び湾曲駆動部43に対する制御を行うことにより、内視鏡プローブ2を被観察物内の目標位置に向けて挿入(及び湾曲)してゆく。(図6のステップS43)
具体的には、制御部52は、現在の位置データ、姿勢データ、牽引長さデータ、挿入長さデータ、及び、ひねり角度データの各データと、目標位置画像データに関連付けられたトレースデータに含まれる各データと、が相互に略一致した状態で内視鏡プローブ2が挿入(及び湾曲)されてゆくように、挿入駆動部6及び湾曲駆動部43に対する制御を行う。
【0116】
なお、制御部52は、図6のステップS43において、内視鏡プローブ2を被観察物内の目標位置へ向けて挿入してゆく際に、前述の動的アイコン101またはガイド用画像等のガイド情報を、リアルタイムの画像データに併せて表示部46に表示させるための制御を画像処理部45に対して行うものであってもよい。
【0117】
また、図6のステップS43の制御は、信号処理部41により生成されたリアルタイムの画像データが1フレーム分出力される毎に行われるものであってもよく、または、数秒に1回の間隔で行われるものであってもよい。
【0118】
また、図6のステップS43の制御は、前述の各データを用いて内視鏡プローブ2を挿入(及び湾曲)してゆくものに限らず、例えば、現在の位置データ及び姿勢データと、目標位置画像データに関連付けられたトレースデータに含まれる位置データ及び姿勢データと、を相互に略一致させながら内視鏡プローブ2を挿入(及び湾曲)してゆくようなものであってもよい。
【0119】
また、図6のステップS43の制御は、前述の各データを用いて内視鏡プローブ2を挿入(及び湾曲)してゆくものに限らず、例えば、信号処理部41からリアルタイムに出力される各フレームの画像データと、目標位置画像データと、の間におけるマッチング処理を随時行うことにより、目標位置画像データと略同じ画像データが撮像されるまで内視鏡プローブ2を挿入(及び湾曲)してゆくようなものであってもよい。
【0120】
一方、制御部52は、図6のステップS43の挿入駆動部6及び湾曲駆動部43に対する制御が完了した際に、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨を告知するための制御を行う(図6のステップS44)。
【0121】
具体的には、制御部52は、現在の内視鏡プローブ2の先端部の位置及び姿勢と、トレース済の内視鏡プローブ2の先端部の位置及び姿勢とが一致した旨に関する情報を表示部46に表示させるための制御を画像処理部45に対して行うとともに、当該情報を音声により伝えるための制御を発音部50に対して行う。
【0122】
作業者は、表示部46及び発音部50において告知された情報に基づき、内視鏡プローブ2の挿入が完了したことを認識すると、リアルタイムの画像データに基づく被写体の検査を開始する。
【0123】
なお、制御部52は、図6のステップS44の処理を行った直後において、例えば、表示部46に表示される画像データをフリーズさせるための制御を行ってもよく、記録媒体51に静止画の画像データを記録させるための制御を行ってもよく、記録媒体51への動画の画像データの記録を開始させるための制御を行ってもよく、または、撮像部21により撮像されている被写体の計測に関する処理を行うように動作してもよい。
【0124】
また、制御部52は、図6のステップS44の処理を行った直後において、例えば、目標位置画像データ、または、目標位置画像データを含む動画の画像データのいずれかをリアルタイムの画像データに併せて再生表示させるための制御を行ってもよい。
【0125】
以上に述べたように、本実施例によれば、リアルタイムの画像データまたは記録用画像データの各フレームに対応するトレースデータを取得し、当該取得したトレースデータを用いて被観察物内へ内視鏡プローブを挿入してゆくことができる。その結果、本実施例によれば、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性が向上し、内視鏡プローブの挿入操作に要する時間を短縮させることができる。
【0126】
なお、本実施例によれば、少なくとも位置データがトレースデータに含まれる限りにおいては、内視鏡プローブを被観察物内へ挿入してゆく過程における挿入状態の再現性を十分に確保することができる。そのため、本実施例によれば、図2または図3に示すフローチャートの処理等において、例えば、姿勢データ、牽引長さデータ、及び、計時データのうちの少なくともいずれか1つのデータと、位置データと、からなるトレースデータが取得されるものであってよい。
【0127】
また、本実施例のトレースデータは、信号処理部41において生成された画像データが出力されるタイミング、または、コーデック部44において生成された記録用の画像データが出力されるタイミングのいずれかに基づいて取得されるものである限りにおいては、1フレーム分の画像データ(または記録用の画像データ)が出力されるタイミング毎に取得される(記録される)ものでなくともよい。具体的には、本実施例のトレースデータは、例えば、信号処理部41またはコーデック部44から所定の複数フレーム分の画像データが出力されるタイミング毎に取得されるものであってもよく、信号処理部41またはコーデック部44から1フレーム分の画像データが出力されるタイミングに近いタイミングにおいて一定時間毎に取得されるものであってもよい。
【0128】
本発明は、上述した実施例に限定されるものではなく、発明の趣旨を逸脱しない範囲内において種々の変更や応用が可能であることは勿論である。
【0129】
[付記]
付記項1
被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、
前記先端部の変位量を検出する変位量検出部と、
前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、
前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、
前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを、前記信号処理部において生成された前記画像データが出力されるタイミング、または、前記記録用画像生成部において生成された前記記録用の画像データが出力されるタイミングのいずれかに基づいて取得するトレースデータ取得部と、
前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、
を有することを特徴とする内視鏡装置。
【0130】
付記項2
前記トレースデータは、前記被観察物内の注目位置を示すフラグが設定された状態で前記記録媒体に記録されることを特徴とする付記項1に記載の内視鏡装置。
【0131】
付記項3
前記フラグが設定された状態で前記記録媒体に記録されたトレースデータを用いて前記内視鏡プローブを前記被観察物内に挿入してゆく場合において、前記先端部が前記注目位置に到達したことを告知するための情報が表示部に表示されることを特徴とする付記項2に記載の内視鏡装置。
【0132】
付記項4
前記記録媒体に記録されたトレースデータを用いて前記内視鏡プローブを前記被観察物内に挿入してゆく場合において、前記内視鏡プローブの挿入操作を支援可能なガイド情報が表示部に表示されることを特徴とする付記項1に記載の内視鏡装置。
【符号の説明】
【0133】
1 内視鏡装置
2 内視鏡プローブ
3 光学アダプタ部
4 本体部
6 挿入駆動部
21 撮像部
24 加速度センサ
25 角速度センサ
41 信号処理部
45 画像処理部
46 表示部
49 入力部
51 記録媒体
52 制御部
【先行技術文献】
【特許文献】
【0134】
【特許文献1】特開2005−338551号公報
【特許請求の範囲】
【請求項1】
被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、
前記先端部の変位量を検出する変位量検出部と、
前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、
前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、
前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを取得するトレースデータ取得部と、
前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、
を有することを特徴とする内視鏡装置。
【請求項2】
前記トレースデータ取得部は、前記トレースデータを、前記信号処理部において生成された前記画像データが出力されるタイミング、または、前記記録用画像生成部において生成された前記記録用の画像データが出力されるタイミングのいずれかに基づいて取得することを特徴とする請求項1記載の内視鏡装置。
【請求項3】
前記トレースデータ取得部は、前記信号処理部から1フレーム分の前記画像データが出力される毎に、または、前記記録用画像生成部から1フレーム分の前記記録用の画像データが出力される毎に前記トレースデータを取得することを特徴とする請求項2に記載の内視鏡装置。
【請求項4】
前記トレースデータ取得部は、前記信号処理部から所定の複数フレーム分の前記画像データが出力される毎に、または、前記記録用画像生成部から前記所定の複数フレーム分の前記記録用の画像データが出力される毎に前記トレースデータを取得することを特徴とする請求項2に記載の内視鏡装置。
【請求項5】
前記変位量検出部は、前記先端部の加速度を検出する加速度センサを具備し、
前記トレースデータには、前記加速度センサの検出結果に基づいて算出される前記先端部の位置情報が少なくとも含まれることを特徴とする請求項1又は2に記載の内視鏡装置。
【請求項6】
前記変位量検出部は、前記先端部の角速度を検出する角速度センサをさらに具備し、
前記トレースデータには、前記加速度センサの検出結果に基づいて算出される前記先端部の位置情報と、前記角速度センサの検出結果に基づいて算出される前記先端部の姿勢情報と、が少なくとも含まれることを特徴とする請求項5に記載の内視鏡装置。
【請求項7】
前記トレースデータは、前記被観察物内の注目位置を示すフラグが設定された状態で前記記録媒体に記録されることを特徴とする請求項1又は2に記載の内視鏡装置。
【請求項1】
被観察物内に挿入可能であり、前記被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、
前記先端部の変位量を検出する変位量検出部と、
前記撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、
前記信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、
前記変位量検出部の検出結果に基づいて算出される前記先端部の位置情報を少なくとも含むトレースデータを取得するトレースデータ取得部と、
前記トレースデータと、前記記録用の画像データと、を関連付けて記録媒体に記録させるための処理を行う記録制御部と、
を有することを特徴とする内視鏡装置。
【請求項2】
前記トレースデータ取得部は、前記トレースデータを、前記信号処理部において生成された前記画像データが出力されるタイミング、または、前記記録用画像生成部において生成された前記記録用の画像データが出力されるタイミングのいずれかに基づいて取得することを特徴とする請求項1記載の内視鏡装置。
【請求項3】
前記トレースデータ取得部は、前記信号処理部から1フレーム分の前記画像データが出力される毎に、または、前記記録用画像生成部から1フレーム分の前記記録用の画像データが出力される毎に前記トレースデータを取得することを特徴とする請求項2に記載の内視鏡装置。
【請求項4】
前記トレースデータ取得部は、前記信号処理部から所定の複数フレーム分の前記画像データが出力される毎に、または、前記記録用画像生成部から前記所定の複数フレーム分の前記記録用の画像データが出力される毎に前記トレースデータを取得することを特徴とする請求項2に記載の内視鏡装置。
【請求項5】
前記変位量検出部は、前記先端部の加速度を検出する加速度センサを具備し、
前記トレースデータには、前記加速度センサの検出結果に基づいて算出される前記先端部の位置情報が少なくとも含まれることを特徴とする請求項1又は2に記載の内視鏡装置。
【請求項6】
前記変位量検出部は、前記先端部の角速度を検出する角速度センサをさらに具備し、
前記トレースデータには、前記加速度センサの検出結果に基づいて算出される前記先端部の位置情報と、前記角速度センサの検出結果に基づいて算出される前記先端部の姿勢情報と、が少なくとも含まれることを特徴とする請求項5に記載の内視鏡装置。
【請求項7】
前記トレースデータは、前記被観察物内の注目位置を示すフラグが設定された状態で前記記録媒体に記録されることを特徴とする請求項1又は2に記載の内視鏡装置。
【図1】


【図2】
【図3】
【図4】
【図6】
【図5】
【図2】
【図3】
【図4】
【図6】
【図5】
【公開番号】特開2012−150231(P2012−150231A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−8151(P2011−8151)
【出願日】平成23年1月18日(2011.1.18)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月18日(2011.1.18)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]