
内骨格型ロボット用外装
【課題】内骨格型ロボットの外装の位置の保持や外装の自重の分散を良好に行うとともに、内部構造物の設計変更にも容易に対応可能にすることにある。
【解決手段】ロボットの機能に対応する形状のフレームを持つ内部構造物2を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装1において、前記内部構造物2と当接する部分の少なくとも一部を形成するパッド1d,1e,1fを、当該外装1の外部形状を形成する肉部1aの素材の発泡ウレタンフォームより反発弾性率が低い素材である低反発弾性フォームで形成することを特徴とする、内骨格型ロボット用外装である。
【解決手段】ロボットの機能に対応する形状のフレームを持つ内部構造物2を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装1において、前記内部構造物2と当接する部分の少なくとも一部を形成するパッド1d,1e,1fを、当該外装1の外部形状を形成する肉部1aの素材の発泡ウレタンフォームより反発弾性率が低い素材である低反発弾性フォームで形成することを特徴とする、内骨格型ロボット用外装である。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を生物の外形に似せる等任意の形状にする内骨格型ロボット用外装に関するものである。
【背景技術】
【0002】
従来の通常の二足歩行型等のロボットは、駆動機構や制御回路等を内蔵する殻状のフレームを、硬質の素材で形成した薄肉の外装で覆ったり、その殻状のフレーム自体が外骨格状をなして外装を兼ねたりして、形状と剛性とを保っていた。
【0003】
ところで、上記のように殻状のフレームに硬質のカバーを取り付けたりフレーム自体が外装を兼ねたりすると外形の自由度が小さくなるため、ロボットの外形を生物に似せる等任意の形状にするのが困難であり、このため近年、ロボットに求められる外形に関わらずそのロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物を柔らかい素材で覆って、ロボットの外形を生物の外形等に似せる内骨格型ロボット用外装が試行されている。
【0004】
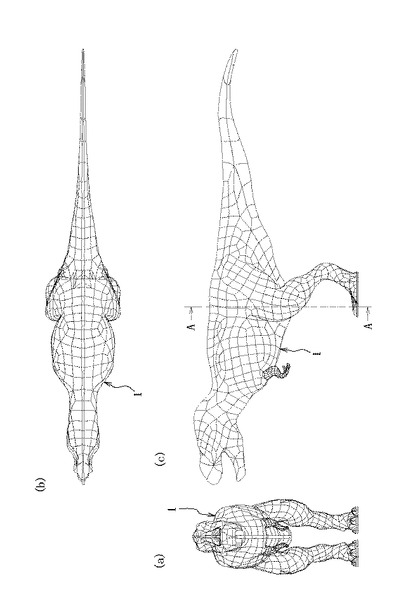
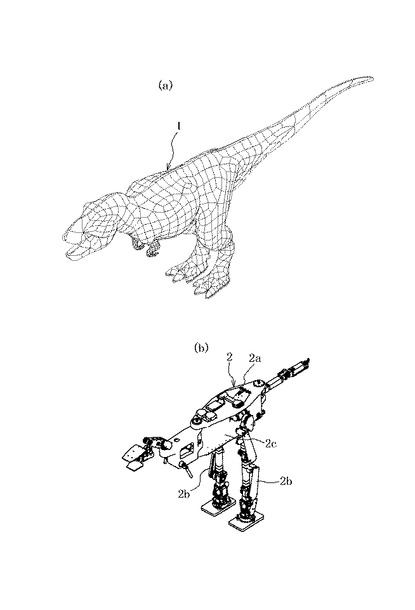
かかる内骨格型ロボットとしては、例えば、図5(a),(b)および(c)に正面図、平面図および側面図を示す、本願出願人が製作した恐竜型ロボットが知られており(非特許文献1参照)、図6(a),(b)は、その恐竜型ロボットの外装1および内部構造物2をそれぞれ示す斜視図、図7は、その恐竜型ロボットの外装1の分解斜視図、そして図8は、その恐竜型ロボットの外装1および内部構造物2の、図5(c)のA−A線に沿う横断面図である。
【0005】
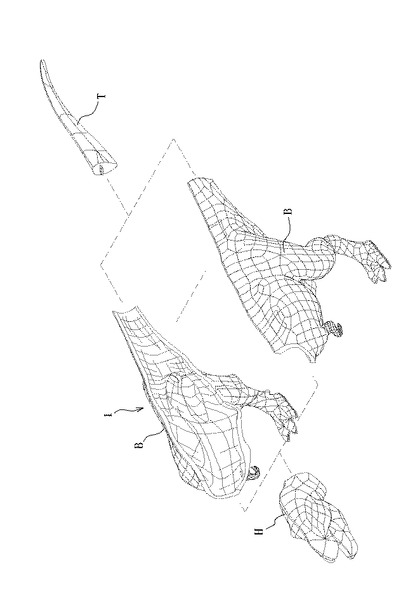
この恐竜型ロボットは、図6(b)に示す如き、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を、図6(a)および図5(a)〜(c)に示す如き恐竜型の外装1で覆ったものであり、ここにおける外装1は、図7に示すように、頭部Hと左右胴体部Bと尾部Tとを図示しないジッパーで結合して内部構造物2を覆うように構成されたもので、図8に示すように、当該外装1の外部形状を形成する柔らかい素材としての発泡ウレタンフォーム製の肉部1aの外表面上にシリコン製の外皮1bを設けて構成されている。
【非特許文献1】http://www.nedo.go.jp/expo2005/robot/dinosaur/
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記外装1の肉部1aに使用されている発泡ウレタンフォームは反発弾性率が高いことから、押し付けられる形状への馴染みが良くないため、フレームや駆動機構等の内部構造物2上に載置されて外装1の自重を支持する外装上部の内側形状がそこに押し付けられる内部構造物2の凹凸形状に即したものとならず、それゆえ外装1の位置の保持や外装1の自重の分散を良好に行えないという問題があった。そしてこの問題の解決のために外装1の上部の内側形状を内部構造物2の凹凸形状に対応させてあらかじめ形成しておくと、その内部構造物2の設計変更で凹凸形状が変更された場合に対応が困難であるという問題があった。
【0007】
また上記外装1の肉部1a用の発泡ウレタンフォームは、内部構造物2の関節部等の可動部との干渉で、局部的に摩耗したり、引っかかって位置がずれたり引きちぎられたりするという問題もあった。
【課題を解決するための手段】
【0008】
この発明は、上記課題を有利に解決することを目的とするものであり、この発明の内骨格型ロボット用外装は、ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装構造において、前記内部構造物と当接する部分の少なくとも一部を、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームで形成することを特徴とするものである。
【発明の効果】
【0009】
かかるこの発明の内骨格型ロボット用外装によれば、ロボットの機能に対応する形状のフレームを持つ内部構造物に当該外装を適用すると、その内部構造物と当接する部分の少なくとも一部を形成する、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームが、当該外装の自重等によりその内部構造物の凹凸形状に押し付けられて、その内部構造物の凹凸形状に嵌まり合うように変形するので、当該外装の位置ずれを防止して外装の位置を良好に保持し得るとともに、外装の自重の少なくとも一部をその反発弾性率が低いウレタンフォーム全体で受けて良好に分散させることができる。
【0010】
さらにこの発明の内骨格型ロボット用外装によれば、ロボットの内部構造物の凹凸形状に変更があった場合でも、当該外装をそのまま適用するだけで、その変更があった内部構造物の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物の設計変更に容易に対応することができる。
【0011】
なお、この発明の内骨格型ロボット用外装においては、前記外装の外部形状を形成するウレタンフォームを発泡ウレタンフォームとし、前記外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームを軟質ウレタンフォーム、好ましくはその軟質ウレタンフォームの一種である低反発弾性フォームとしても良く、このようにすれば、軟質ウレタンフォームは粘性と弾性を併せ持ち、中でも特に低反発弾性フォームは弾性を抑えて粘性を高めてあるため、押し付けられた凹凸形状への追従性が高く、ロボットの内部構造物の凹凸形状により良好に嵌まり合うことができる。
【0012】
また、この発明の内骨格型ロボット用外装においては、前記内部構造物と摺接する部分の少なくとも一部を、テフロン(登録商標)コーティングしたアクリル変性塩化ビニールで形成しても良く、このようにすれば、アクリル変性塩化ビニールで外装内面を平坦に維持しつつ、テフロンコーティングで内部構造物との摺接による摩擦を僅かなものとして、関節部等の可動部との干渉で外装が局部的に摩耗したり引っかかって位置がずれたり引きちぎられたりするのを防止することができる。
【0013】
さらに、この発明の内骨格型ロボット用外装においては、前記内部構造物から離間した可動部分の少なくとも一部にゴムシートを張り渡しても良く、このようにすれば、外装の外部形状を形成するウレタンフォームの弾性をゴムシートで補って、ロボットの動作に対する外装の伸縮性を維持し、外装の動きを自然なものにすることができる。
【0014】
さらに、この発明の内骨格型ロボット用外装においては、前記外部形状を形成するウレタンフォームの内部に、廃熱用の通気経路を形成しても良く、このようにすれば、外装が位置ずれしたり自重で局部的に潰れたりすることがないので、廃熱用通気経路の位置ずれや閉鎖を防止し得て、内部構造物から発生する熱を効率良く排出することができる。
【発明を実施するための最良の形態】
【0015】
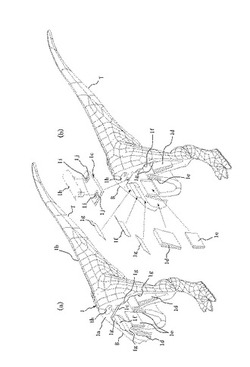
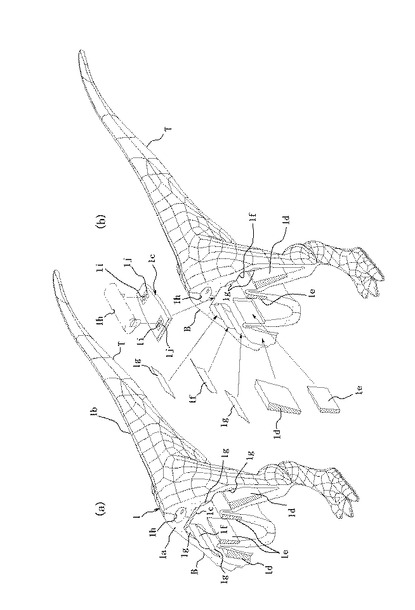
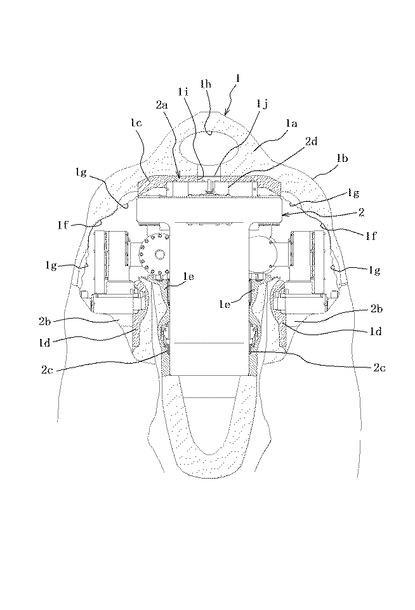
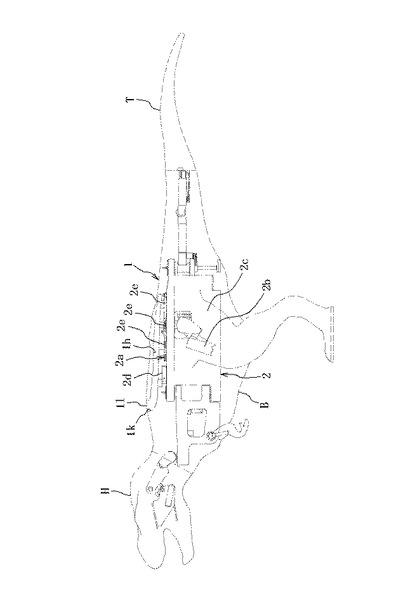
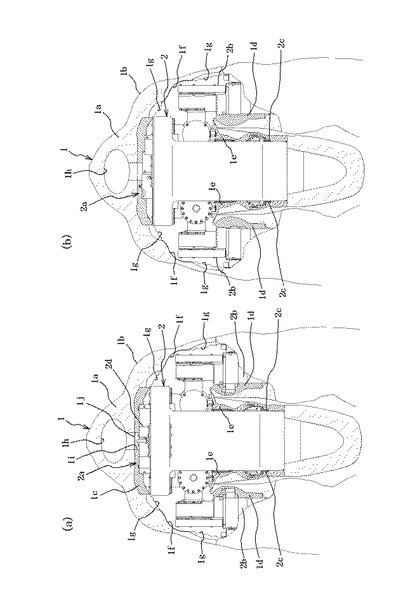
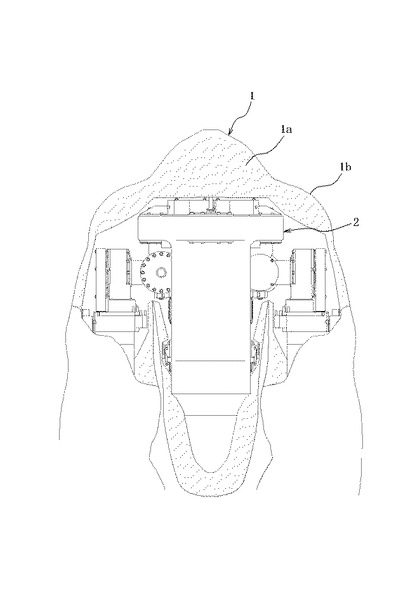
以下、本発明の実施の形態を実施例によって、図面に基づき詳細に説明する。ここに、図1(a)は、この発明の内骨格型ロボット用外装を内骨格型ロボットの一例としての図6(a)および図7に示す恐竜型ロボットに適用した一実施例を図5中のA−A線に沿う断面以降の外装後部についてその断面とともに示す斜視図、図1(b)は、その図1(a)に示す外装後部の構成を示す分解斜視図、図2は、上記実施例の外装の、図5中のA−A線に沿う断面図、そして図3は、上記恐竜型ロボットの内部構造物と上記実施例の外装との位置関係を示す説明図であり、図中先の従来例と同様の部分はそれと同一の符号にて示す。
【0016】
すなわち、この実施例の内骨格型ロボット用外装1は、図6〜図8に示す従来例と同様、図6(b)に示す如き、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を覆うものであり、この実施例の外装1も、図7に示すように、頭部H(図1では図示せず)と左右胴体部Bと尾部Tとを図示しないジッパーで結合して内部構造物2を覆うように構成されたもので、図2に示すように、当該外装1の外部形状を形成する柔らかい素材としての発泡ウレタンフォーム製の肉部1aの外表面上にシリコン製の外皮1bを設けている。
【0017】
しかして、この実施例の外装1ではまた、図1および図2に示すように、左右胴体部Bを合わせた胴体部の内側上部に、発泡ウレタンフォームよりも反発弾性率が低い低反発弾性フォーム製の背部パッド1cが設けられるとともに、左右胴体部Bの後脚部の付け根の内側下部にも上記低反発弾性フォーム製の脚部パッド1dが設けられ、さらに左右胴体部Bの脇腹部の内側にも上記低反発弾性フォーム製の脇腹部パッド1eが設けられており、背部パッド1cは主に外装1の胴体部Bの自重で内部構造物2の上部2aに押し付けられてその上部と当接して、その上部の凹凸形状に嵌まり合うように変形し、また脚部パッド1dと脇腹部パッド1eとは、内部構造物2の後脚部2bの付け根の内側と脇腹部2cとにそれぞれ当接して、それら後脚部2bの付け根と脇腹部2cとの凹凸形状に嵌まり合うように変形している。なお、ここにおける低反発弾性フォームは、JIS K 6400のA法に準拠した測定法で測定した反発弾性率が1〜20%の低反発弾性ポリウレタンフォームとすることが好ましい。1%未満ではパッド形状の維持が困難であり、20%を超えると当接相手の形状に充分に嵌まり合う(倣う)ように変形しづらくなるからである。
【0018】
これにより、背部パッド1cは外装1の胴体部Bの背部を内部構造物2の上部2aに対して位置決めし、脚部パッド1dは外装1の胴体部Bの後脚部を内部構造物2の後脚部2bに対して位置決めし、脇腹部パッド1eは外装1の胴体部Bの脇腹部を内部構造物2の脇腹部2cに対して位置決めして、外装1の胴体部Bのそれぞれの部位の、内部構造物2に対する位置ずれを防止することができ、背部パッド1cはさらに、外装1の胴体部Bの自重を背部パッド1c全体で受けて良好に分散させることができる。
【0019】
この実施例の外装1ではさらに、図1および図2に示すように、左右胴体部Bの後脚部の付け根の内側上部に、表面をテフロンコーティングしたアクリル変性塩化ビニール製の脚部プレート1fが設けられるともに、それらの脚部プレート1fの上下の位置にそれぞれ、ゴムシート1gが上下方向に張り渡されており、脚部プレート1fは主に外装1の胴体部Bの自重で内部構造物2の後脚部2bの付け根の外側角部に押し付けられて、後脚部2bの動きに連れてその付け根の外側角部と摺接し、ゴムシート1gは、発泡ウレタンフォーム製の肉部1bの弾性を補って、内部構造物2の後脚部2bの動きに対する外装1の左右胴体部Bの後脚部の追従性を良くするとともに、左右胴体部Bの後脚部の自重によるその左右胴体部Bの後脚部の垂れ下がりを防止することができる。
【0020】
この実施例の外装1ではさらに、図1〜図3に示すように、外装1の胴体部Bの背部に沿ってその内部に、肉部1aをくり抜いて廃熱用の通気経路1hが形成されており、その通気経路1hは複数に分岐して、内部構造物2の上部2aに設けられた胴体排気ファン2dや回路素子等の発熱源2eに対応して背部パッド1cに設けられた複数の通気穴1iにそれぞれ連通し、通気穴1iにはそれぞれ、通気穴1iの形状維持のために金属製または樹脂製の網1jが設けられている。一方、通気経路1hの前端部の排気口1kは、図3に示すように、外装1の胴体部Bの背部の外表面に設けた網1lを介して外気中に開放されている。
【0021】
従って、この実施例の内骨格型ロボット用外装1によれば、当該外装1の外部形状を形成する肉部1aの発泡ウレタンフォームより反発弾性率が低い低反発弾性フォーム製の背部パッド1c、脚部パッド1dおよび腹部パッド1eが、外装1の胴体部Bの各部を内部構造物2の各部に対して位置決めして、外装1の胴体部Bの各部の、内部構造物2の各部に対する位置ずれを防止することができ、背部パッド1cはさらに、外装1の胴体部Bの自重を背部パッド1c全体で受けて良好に分散させることができる。
【0022】
しかもこの実施例の内骨格型ロボット用外装1によれば、図4(a),(b)にそれぞれ異なる凹凸形状の変更の場合を示すように、図2に示す内部構造物2に対してその凹凸形状に変更があった場合でも、当該外装1をそのまま適用するだけで、その変更があった内部構造物2の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物2の設計変更に容易に対応することができる。
【0023】
さらにこの実施例の内骨格型ロボット用外装1によれば、当該外装1の外部形状を形成する肉部1aの素材のウレタンフォームを発泡ウレタンフォームとし、背部パッド1c、脚部パッド1dおよび腹部パッド1eの素材のウレタンフォームを上記外部形状を形成するウレタンフォームより反発弾性率が低い低反発弾性フォームとしていることから、それら背部パッド1c、脚部パッド1dおよび腹部パッド1eが、粘性と弾性を併せ持つとともに、特に弾性を抑えて粘性を高めてあるため、押し付けられた凹凸形状への追従性が高く、内部構造物2の凹凸形状に良好に嵌まり合うことができる。
【0024】
さらにこの実施例の内骨格型ロボット用外装1によれば、内部構造物2の後脚部2bと摺接する部分を、テフロンコーティングしたアクリル変性塩化ビニール製の脚部プレート1fで形成していることから、アクリル変性塩化ビニールで外装内面を平坦に維持しつつ、テフロンコーティングで内部構造物2の後脚部2bとの摺接による摩擦を僅かなものとして、後脚部2bとの干渉で外装1が局部的に摩耗したり引っかかって位置がずれたり引きちぎられたりするのを防止することができる。
【0025】
さらにこの実施例の内骨格型ロボット用外装1によれば、内部構造物2から離間した可動部分である、脚部プレート1fの上下の位置にそれぞれゴムシート1gを張り渡してあるので、外装1の外部形状を形成する肉部1aの発泡ウレタンフォームの弾性をゴムシート1gで補って、当該恐竜型ロボットの後脚部の動作に対し、外装1の後脚部の伸縮性を維持して、外装1の後脚部を良好に追従させ、外装の動きを自然なものにすることができる。
【0026】
さらにこの実施例の内骨格型ロボット用外装1によればその背部の、外部形状を形成する発泡ウレタンフォーム製の肉部1aの内部に、廃熱用の通気経路1hを形成しており、上記のように外装1が内部構造物2に対して位置ずれしたり自重で局部的に潰れたりすることがないことから、その廃熱用通気経路1hの位置ずれや閉鎖を防止し得て、内部構造物2から発生する熱を効率良く排出することができる。
【0027】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、例えば、内骨格型ロボットは恐竜型に限られず人型あるいは動物型等でも良く、また外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームは、低反発弾性フォーム以外の軟質ウレタンフォームでも良い。
【産業上の利用可能性】
【0028】
かくしてこの発明の内骨格型ロボット用外装によれば、ロボットの機能に対応する形状のフレームを持つ内部構造物に当該外装を適用すると、その内部構造物と当接する部分の少なくとも一部を形成する、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームが、当該外装の自重等によりその内部構造物の凹凸形状に押し付けられて、その内部構造物の凹凸形状に嵌まり合うように変形するので、当該外装の位置ずれを防止して外装の位置を良好に保持し得るとともに、外装の自重の少なくとも一部をその反発弾性率が低いウレタンフォーム全体で受けて良好に分散させることができる。
【0029】
さらにこの発明の内骨格型ロボット用外装によれば、ロボットの内部構造物の凹凸形状に変更があった場合でも、当該外装をそのまま適用するだけで、その変更があった内部構造物の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物の設計変更に容易に対応することができる。
【図面の簡単な説明】
【0030】
【図1】(a)は、この発明の内骨格型ロボット用外装を内骨格型ロボットの一例としての図6(a)および図7に示す恐竜型ロボットに適用した一実施例を図5中のA−A線に沿う断面以降の外装後部についてその断面とともに示す斜視図であり、(b)は、その(a)に示す外装後部の構成を示す分解斜視図である。
【図2】上記実施例の外装の、図5中のA−A線に沿う断面図である。
【図3】上記恐竜型ロボットの内部構造物と上記実施例の外装との位置関係を示す説明図である。
【図4】(a),(b)は、内部構造物の形状が図2に示すものからそれぞれ異なって変更された場合の上記実施例の外装1の内側の状態をそれぞれ示す、図2と同様の位置での断面図である。
【図5】(a),(b)および(c)は、従来の内骨格型ロボットの一例としての恐竜型ロボットを示す正面図、平面図および側面図である。
【図6】(a),(b)は、上記恐竜型ロボットの外装および内部構造物をそれぞれ示す斜視図である。
【図7】上記恐竜型ロボットの外装を示す分解斜視図である。
【図8】上記恐竜型ロボットの外装および内部構造物の、図5(c)のA−A線に沿う横断面図である。
【符号の説明】
【0031】
1 外装
1a 肉部
1b 外皮
1c 背部パッド
1d 脚部パッド
1e 脇腹部パッド
1f 脚部プレート
1g ゴムシート
1h 通気経路
1i 通気穴
1j,1l 網
1k 排気口
2 内部構造物
2a 上部
2b 後脚部
2c 脇腹部
2d 胴体排気ファン
2e 発熱源
H 頭部
B 胴体部
T 尾部
【技術分野】
【0001】
この発明は、ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を生物の外形に似せる等任意の形状にする内骨格型ロボット用外装に関するものである。
【背景技術】
【0002】
従来の通常の二足歩行型等のロボットは、駆動機構や制御回路等を内蔵する殻状のフレームを、硬質の素材で形成した薄肉の外装で覆ったり、その殻状のフレーム自体が外骨格状をなして外装を兼ねたりして、形状と剛性とを保っていた。
【0003】
ところで、上記のように殻状のフレームに硬質のカバーを取り付けたりフレーム自体が外装を兼ねたりすると外形の自由度が小さくなるため、ロボットの外形を生物に似せる等任意の形状にするのが困難であり、このため近年、ロボットに求められる外形に関わらずそのロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物を柔らかい素材で覆って、ロボットの外形を生物の外形等に似せる内骨格型ロボット用外装が試行されている。
【0004】
かかる内骨格型ロボットとしては、例えば、図5(a),(b)および(c)に正面図、平面図および側面図を示す、本願出願人が製作した恐竜型ロボットが知られており(非特許文献1参照)、図6(a),(b)は、その恐竜型ロボットの外装1および内部構造物2をそれぞれ示す斜視図、図7は、その恐竜型ロボットの外装1の分解斜視図、そして図8は、その恐竜型ロボットの外装1および内部構造物2の、図5(c)のA−A線に沿う横断面図である。
【0005】
この恐竜型ロボットは、図6(b)に示す如き、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を、図6(a)および図5(a)〜(c)に示す如き恐竜型の外装1で覆ったものであり、ここにおける外装1は、図7に示すように、頭部Hと左右胴体部Bと尾部Tとを図示しないジッパーで結合して内部構造物2を覆うように構成されたもので、図8に示すように、当該外装1の外部形状を形成する柔らかい素材としての発泡ウレタンフォーム製の肉部1aの外表面上にシリコン製の外皮1bを設けて構成されている。
【非特許文献1】http://www.nedo.go.jp/expo2005/robot/dinosaur/
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記外装1の肉部1aに使用されている発泡ウレタンフォームは反発弾性率が高いことから、押し付けられる形状への馴染みが良くないため、フレームや駆動機構等の内部構造物2上に載置されて外装1の自重を支持する外装上部の内側形状がそこに押し付けられる内部構造物2の凹凸形状に即したものとならず、それゆえ外装1の位置の保持や外装1の自重の分散を良好に行えないという問題があった。そしてこの問題の解決のために外装1の上部の内側形状を内部構造物2の凹凸形状に対応させてあらかじめ形成しておくと、その内部構造物2の設計変更で凹凸形状が変更された場合に対応が困難であるという問題があった。
【0007】
また上記外装1の肉部1a用の発泡ウレタンフォームは、内部構造物2の関節部等の可動部との干渉で、局部的に摩耗したり、引っかかって位置がずれたり引きちぎられたりするという問題もあった。
【課題を解決するための手段】
【0008】
この発明は、上記課題を有利に解決することを目的とするものであり、この発明の内骨格型ロボット用外装は、ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装構造において、前記内部構造物と当接する部分の少なくとも一部を、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームで形成することを特徴とするものである。
【発明の効果】
【0009】
かかるこの発明の内骨格型ロボット用外装によれば、ロボットの機能に対応する形状のフレームを持つ内部構造物に当該外装を適用すると、その内部構造物と当接する部分の少なくとも一部を形成する、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームが、当該外装の自重等によりその内部構造物の凹凸形状に押し付けられて、その内部構造物の凹凸形状に嵌まり合うように変形するので、当該外装の位置ずれを防止して外装の位置を良好に保持し得るとともに、外装の自重の少なくとも一部をその反発弾性率が低いウレタンフォーム全体で受けて良好に分散させることができる。
【0010】
さらにこの発明の内骨格型ロボット用外装によれば、ロボットの内部構造物の凹凸形状に変更があった場合でも、当該外装をそのまま適用するだけで、その変更があった内部構造物の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物の設計変更に容易に対応することができる。
【0011】
なお、この発明の内骨格型ロボット用外装においては、前記外装の外部形状を形成するウレタンフォームを発泡ウレタンフォームとし、前記外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームを軟質ウレタンフォーム、好ましくはその軟質ウレタンフォームの一種である低反発弾性フォームとしても良く、このようにすれば、軟質ウレタンフォームは粘性と弾性を併せ持ち、中でも特に低反発弾性フォームは弾性を抑えて粘性を高めてあるため、押し付けられた凹凸形状への追従性が高く、ロボットの内部構造物の凹凸形状により良好に嵌まり合うことができる。
【0012】
また、この発明の内骨格型ロボット用外装においては、前記内部構造物と摺接する部分の少なくとも一部を、テフロン(登録商標)コーティングしたアクリル変性塩化ビニールで形成しても良く、このようにすれば、アクリル変性塩化ビニールで外装内面を平坦に維持しつつ、テフロンコーティングで内部構造物との摺接による摩擦を僅かなものとして、関節部等の可動部との干渉で外装が局部的に摩耗したり引っかかって位置がずれたり引きちぎられたりするのを防止することができる。
【0013】
さらに、この発明の内骨格型ロボット用外装においては、前記内部構造物から離間した可動部分の少なくとも一部にゴムシートを張り渡しても良く、このようにすれば、外装の外部形状を形成するウレタンフォームの弾性をゴムシートで補って、ロボットの動作に対する外装の伸縮性を維持し、外装の動きを自然なものにすることができる。
【0014】
さらに、この発明の内骨格型ロボット用外装においては、前記外部形状を形成するウレタンフォームの内部に、廃熱用の通気経路を形成しても良く、このようにすれば、外装が位置ずれしたり自重で局部的に潰れたりすることがないので、廃熱用通気経路の位置ずれや閉鎖を防止し得て、内部構造物から発生する熱を効率良く排出することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態を実施例によって、図面に基づき詳細に説明する。ここに、図1(a)は、この発明の内骨格型ロボット用外装を内骨格型ロボットの一例としての図6(a)および図7に示す恐竜型ロボットに適用した一実施例を図5中のA−A線に沿う断面以降の外装後部についてその断面とともに示す斜視図、図1(b)は、その図1(a)に示す外装後部の構成を示す分解斜視図、図2は、上記実施例の外装の、図5中のA−A線に沿う断面図、そして図3は、上記恐竜型ロボットの内部構造物と上記実施例の外装との位置関係を示す説明図であり、図中先の従来例と同様の部分はそれと同一の符号にて示す。
【0016】
すなわち、この実施例の内骨格型ロボット用外装1は、図6〜図8に示す従来例と同様、図6(b)に示す如き、二足歩行型ロボットの機能に対応して必要位置に駆動機構を配置する形状のいわゆる内骨格状のフレームを持つ内部構造物2を覆うものであり、この実施例の外装1も、図7に示すように、頭部H(図1では図示せず)と左右胴体部Bと尾部Tとを図示しないジッパーで結合して内部構造物2を覆うように構成されたもので、図2に示すように、当該外装1の外部形状を形成する柔らかい素材としての発泡ウレタンフォーム製の肉部1aの外表面上にシリコン製の外皮1bを設けている。
【0017】
しかして、この実施例の外装1ではまた、図1および図2に示すように、左右胴体部Bを合わせた胴体部の内側上部に、発泡ウレタンフォームよりも反発弾性率が低い低反発弾性フォーム製の背部パッド1cが設けられるとともに、左右胴体部Bの後脚部の付け根の内側下部にも上記低反発弾性フォーム製の脚部パッド1dが設けられ、さらに左右胴体部Bの脇腹部の内側にも上記低反発弾性フォーム製の脇腹部パッド1eが設けられており、背部パッド1cは主に外装1の胴体部Bの自重で内部構造物2の上部2aに押し付けられてその上部と当接して、その上部の凹凸形状に嵌まり合うように変形し、また脚部パッド1dと脇腹部パッド1eとは、内部構造物2の後脚部2bの付け根の内側と脇腹部2cとにそれぞれ当接して、それら後脚部2bの付け根と脇腹部2cとの凹凸形状に嵌まり合うように変形している。なお、ここにおける低反発弾性フォームは、JIS K 6400のA法に準拠した測定法で測定した反発弾性率が1〜20%の低反発弾性ポリウレタンフォームとすることが好ましい。1%未満ではパッド形状の維持が困難であり、20%を超えると当接相手の形状に充分に嵌まり合う(倣う)ように変形しづらくなるからである。
【0018】
これにより、背部パッド1cは外装1の胴体部Bの背部を内部構造物2の上部2aに対して位置決めし、脚部パッド1dは外装1の胴体部Bの後脚部を内部構造物2の後脚部2bに対して位置決めし、脇腹部パッド1eは外装1の胴体部Bの脇腹部を内部構造物2の脇腹部2cに対して位置決めして、外装1の胴体部Bのそれぞれの部位の、内部構造物2に対する位置ずれを防止することができ、背部パッド1cはさらに、外装1の胴体部Bの自重を背部パッド1c全体で受けて良好に分散させることができる。
【0019】
この実施例の外装1ではさらに、図1および図2に示すように、左右胴体部Bの後脚部の付け根の内側上部に、表面をテフロンコーティングしたアクリル変性塩化ビニール製の脚部プレート1fが設けられるともに、それらの脚部プレート1fの上下の位置にそれぞれ、ゴムシート1gが上下方向に張り渡されており、脚部プレート1fは主に外装1の胴体部Bの自重で内部構造物2の後脚部2bの付け根の外側角部に押し付けられて、後脚部2bの動きに連れてその付け根の外側角部と摺接し、ゴムシート1gは、発泡ウレタンフォーム製の肉部1bの弾性を補って、内部構造物2の後脚部2bの動きに対する外装1の左右胴体部Bの後脚部の追従性を良くするとともに、左右胴体部Bの後脚部の自重によるその左右胴体部Bの後脚部の垂れ下がりを防止することができる。
【0020】
この実施例の外装1ではさらに、図1〜図3に示すように、外装1の胴体部Bの背部に沿ってその内部に、肉部1aをくり抜いて廃熱用の通気経路1hが形成されており、その通気経路1hは複数に分岐して、内部構造物2の上部2aに設けられた胴体排気ファン2dや回路素子等の発熱源2eに対応して背部パッド1cに設けられた複数の通気穴1iにそれぞれ連通し、通気穴1iにはそれぞれ、通気穴1iの形状維持のために金属製または樹脂製の網1jが設けられている。一方、通気経路1hの前端部の排気口1kは、図3に示すように、外装1の胴体部Bの背部の外表面に設けた網1lを介して外気中に開放されている。
【0021】
従って、この実施例の内骨格型ロボット用外装1によれば、当該外装1の外部形状を形成する肉部1aの発泡ウレタンフォームより反発弾性率が低い低反発弾性フォーム製の背部パッド1c、脚部パッド1dおよび腹部パッド1eが、外装1の胴体部Bの各部を内部構造物2の各部に対して位置決めして、外装1の胴体部Bの各部の、内部構造物2の各部に対する位置ずれを防止することができ、背部パッド1cはさらに、外装1の胴体部Bの自重を背部パッド1c全体で受けて良好に分散させることができる。
【0022】
しかもこの実施例の内骨格型ロボット用外装1によれば、図4(a),(b)にそれぞれ異なる凹凸形状の変更の場合を示すように、図2に示す内部構造物2に対してその凹凸形状に変更があった場合でも、当該外装1をそのまま適用するだけで、その変更があった内部構造物2の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物2の設計変更に容易に対応することができる。
【0023】
さらにこの実施例の内骨格型ロボット用外装1によれば、当該外装1の外部形状を形成する肉部1aの素材のウレタンフォームを発泡ウレタンフォームとし、背部パッド1c、脚部パッド1dおよび腹部パッド1eの素材のウレタンフォームを上記外部形状を形成するウレタンフォームより反発弾性率が低い低反発弾性フォームとしていることから、それら背部パッド1c、脚部パッド1dおよび腹部パッド1eが、粘性と弾性を併せ持つとともに、特に弾性を抑えて粘性を高めてあるため、押し付けられた凹凸形状への追従性が高く、内部構造物2の凹凸形状に良好に嵌まり合うことができる。
【0024】
さらにこの実施例の内骨格型ロボット用外装1によれば、内部構造物2の後脚部2bと摺接する部分を、テフロンコーティングしたアクリル変性塩化ビニール製の脚部プレート1fで形成していることから、アクリル変性塩化ビニールで外装内面を平坦に維持しつつ、テフロンコーティングで内部構造物2の後脚部2bとの摺接による摩擦を僅かなものとして、後脚部2bとの干渉で外装1が局部的に摩耗したり引っかかって位置がずれたり引きちぎられたりするのを防止することができる。
【0025】
さらにこの実施例の内骨格型ロボット用外装1によれば、内部構造物2から離間した可動部分である、脚部プレート1fの上下の位置にそれぞれゴムシート1gを張り渡してあるので、外装1の外部形状を形成する肉部1aの発泡ウレタンフォームの弾性をゴムシート1gで補って、当該恐竜型ロボットの後脚部の動作に対し、外装1の後脚部の伸縮性を維持して、外装1の後脚部を良好に追従させ、外装の動きを自然なものにすることができる。
【0026】
さらにこの実施例の内骨格型ロボット用外装1によればその背部の、外部形状を形成する発泡ウレタンフォーム製の肉部1aの内部に、廃熱用の通気経路1hを形成しており、上記のように外装1が内部構造物2に対して位置ずれしたり自重で局部的に潰れたりすることがないことから、その廃熱用通気経路1hの位置ずれや閉鎖を防止し得て、内部構造物2から発生する熱を効率良く排出することができる。
【0027】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、例えば、内骨格型ロボットは恐竜型に限られず人型あるいは動物型等でも良く、また外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームは、低反発弾性フォーム以外の軟質ウレタンフォームでも良い。
【産業上の利用可能性】
【0028】
かくしてこの発明の内骨格型ロボット用外装によれば、ロボットの機能に対応する形状のフレームを持つ内部構造物に当該外装を適用すると、その内部構造物と当接する部分の少なくとも一部を形成する、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームが、当該外装の自重等によりその内部構造物の凹凸形状に押し付けられて、その内部構造物の凹凸形状に嵌まり合うように変形するので、当該外装の位置ずれを防止して外装の位置を良好に保持し得るとともに、外装の自重の少なくとも一部をその反発弾性率が低いウレタンフォーム全体で受けて良好に分散させることができる。
【0029】
さらにこの発明の内骨格型ロボット用外装によれば、ロボットの内部構造物の凹凸形状に変更があった場合でも、当該外装をそのまま適用するだけで、その変更があった内部構造物の凹凸形状に嵌まり合うように変形して、上述した外装位置の保持効果と外装自重の分散効果とをもたらすことができるので、内部構造物の設計変更に容易に対応することができる。
【図面の簡単な説明】
【0030】
【図1】(a)は、この発明の内骨格型ロボット用外装を内骨格型ロボットの一例としての図6(a)および図7に示す恐竜型ロボットに適用した一実施例を図5中のA−A線に沿う断面以降の外装後部についてその断面とともに示す斜視図であり、(b)は、その(a)に示す外装後部の構成を示す分解斜視図である。
【図2】上記実施例の外装の、図5中のA−A線に沿う断面図である。
【図3】上記恐竜型ロボットの内部構造物と上記実施例の外装との位置関係を示す説明図である。
【図4】(a),(b)は、内部構造物の形状が図2に示すものからそれぞれ異なって変更された場合の上記実施例の外装1の内側の状態をそれぞれ示す、図2と同様の位置での断面図である。
【図5】(a),(b)および(c)は、従来の内骨格型ロボットの一例としての恐竜型ロボットを示す正面図、平面図および側面図である。
【図6】(a),(b)は、上記恐竜型ロボットの外装および内部構造物をそれぞれ示す斜視図である。
【図7】上記恐竜型ロボットの外装を示す分解斜視図である。
【図8】上記恐竜型ロボットの外装および内部構造物の、図5(c)のA−A線に沿う横断面図である。
【符号の説明】
【0031】
1 外装
1a 肉部
1b 外皮
1c 背部パッド
1d 脚部パッド
1e 脇腹部パッド
1f 脚部プレート
1g ゴムシート
1h 通気経路
1i 通気穴
1j,1l 網
1k 排気口
2 内部構造物
2a 上部
2b 後脚部
2c 脇腹部
2d 胴体排気ファン
2e 発熱源
H 頭部
B 胴体部
T 尾部
【特許請求の範囲】
【請求項1】
ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装において、
前記内部構造物と当接する部分の少なくとも一部を、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームで形成することを特徴とする、内骨格型ロボット用外装。
【請求項2】
前記外装の外部形状を形成するウレタンフォームを発泡ウレタンフォームとし、
前記外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームを軟質ウレタンフォームとすることを特徴とする、請求項1記載の内骨格型ロボット用外装。
【請求項3】
前記内部構造物と摺接する部分の少なくとも一部を、テフロンコーティングしたアクリル変性塩化ビニールで形成することを特徴とする、請求項1または2記載の内骨格型ロボット用外装。
【請求項4】
前記内部構造物から離間した可動部分の少なくとも一部に、ゴムシートを張り渡すことを特徴とする、請求項1から3までの何れか記載の内骨格型ロボット用外装。
【請求項5】
前記外部形状を形成するウレタンフォームの内部に、廃熱用の通気経路を形成することを特徴とする、請求項1から4までの何れか記載の内骨格型ロボット用外装。
【請求項1】
ロボットの機能に対応する形状のフレームを持つ内部構造物を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装において、
前記内部構造物と当接する部分の少なくとも一部を、当該外装の外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームで形成することを特徴とする、内骨格型ロボット用外装。
【請求項2】
前記外装の外部形状を形成するウレタンフォームを発泡ウレタンフォームとし、
前記外部形状を形成するウレタンフォームより反発弾性率が低いウレタンフォームを軟質ウレタンフォームとすることを特徴とする、請求項1記載の内骨格型ロボット用外装。
【請求項3】
前記内部構造物と摺接する部分の少なくとも一部を、テフロンコーティングしたアクリル変性塩化ビニールで形成することを特徴とする、請求項1または2記載の内骨格型ロボット用外装。
【請求項4】
前記内部構造物から離間した可動部分の少なくとも一部に、ゴムシートを張り渡すことを特徴とする、請求項1から3までの何れか記載の内骨格型ロボット用外装。
【請求項5】
前記外部形状を形成するウレタンフォームの内部に、廃熱用の通気経路を形成することを特徴とする、請求項1から4までの何れか記載の内骨格型ロボット用外装。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−209391(P2007−209391A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−29663(P2006−29663)
【出願日】平成18年2月7日(2006.2.7)
【出願人】(591210600)川田工業株式会社 (57)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月7日(2006.2.7)
【出願人】(591210600)川田工業株式会社 (57)
【Fターム(参考)】
[ Back to top ]