
円形加速器、および円形加速器の運転方法
【課題】安定な制御と、調整が簡単で調整時間が短い円形加速器を提供すること。
【解決手段】出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、ビーム電流検出器の検出信号と目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とにより次の周波数を決定する周波数決定部と、を備え、この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、決定された次の周波数の高周波を高周波発生装置が発生するようにした
【解決手段】出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、ビーム電流検出器の検出信号と目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とにより次の周波数を決定する周波数決定部と、を備え、この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、決定された次の周波数の高周波を高周波発生装置が発生するようにした
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、粒子線治療装置などに用いるために、高周波電圧により荷電粒子を加速して、加速された荷電粒子を取り出す円形加速器に関する。
【背景技術】
【0002】
シンクロトロン等の円形加速器で荷電粒子を周回加速させ、高エネルギーまで加速された荷電粒子をその周回軌道から取り出し、ビーム状となった荷電粒子(荷電粒子ビーム、粒子線とも称する)をビーム輸送系で輸送して所望の対象物に照射する物理実験や、癌の治療などの医療用として利用することが行われている。シンクロトロンは、荷電粒子ビームを長時間周回させるための真空ダクト、周回軌道や荷電粒子ビームサイズを制御するための偏向磁場や収束磁場を発生する電磁石群、周回周期に同期した高周波電圧(加速電圧とも称する)でビームを加速する高周波加速空洞、高周波加速空洞に加える高周波電圧を制御する高周波発生装置、真空ダクトに荷電粒子を導入する入射装置、荷電粒子を円形加速器外に取り出す出射装置を備える。上記構成要素の中で、高周波発生装置は、加速電圧を発生する高周波源、この高周波の周波数、電圧を制御する高周波制御装置と、発生させた高周波を増幅する増幅器からなる。
【0003】
円形加速器の運転は、入射、加速、出射で構成される。高周波発生装置は、時間的に一様分布の入射ビームに、加速電圧を高周波加速空洞に印加することで、安定加速領域上にビームの塊(バンチ)を形成する。加速中は、高周波加速空洞に印加する加速電圧の周波数を増加させる。円形加速器の一種であるシンクロトロン(円形加速器は周回半径が一定であるシンクロトロンの他に、周回半径が加速とともに大きくなるサイクロトロン等がある。)では、ビームの周回半径を一定にするため、荷電粒子の周回軌道を形成するための偏向電磁石による偏向磁場強度にあわせて、高周波発生装置が加速電圧周波数を制御する。目的エネルギーまで加速されたビームは、最後に出射用磁石により軌道を曲げられ円形加速器外へ取り出す。
【0004】
一般に、円形加速器中の荷電粒子は、設計軌道を中心としてベータトロン振動をしながら周回している。この際、セパラトリクスと呼ばれる安定限界が存在し、安定限界内、すなわち、安定領域の荷電粒子は安定した周回を行うが、安定領域を超えた荷電粒子は振動振幅を増加して発散する性質を有する。この性質を利用して荷電粒子を出射するため、従来の円形加速器においては、四極電磁石を用いて、加速器1周当たりのベータトロン振動数を表すチューンを整数±1/3に近づけ、六極電磁石を励磁(3次共鳴)すること等が行
われる。
【0005】
出射時は例えば、円形加速器の高周波加速空洞に印加する高周波電圧の周波数を変化させることにより、周回する荷電粒子群である荷電粒子ビームの中心運動量を変位させてベータトロン振動の安定領域を狭めて、出射する方式が提案されている(例えば特許文献1)。この方法では、運動量の変位量に応じてビームが出射されるため高周波加速空洞の高周波電圧の周波数を徐々に変化させながらビームの出射が行われる。
【0006】
また、高周波加速空洞とは別に、高周波電圧を発生させる電極を備え、この電極間で発生させた電界で中心運動量は変位させずに、セパラトリクス(ベータトロン振動の安定領域と共鳴領域の境界)一定でベータトロン振動の振幅を大きくし、ビームを安定領域から共鳴領域に追い出すことにより出射する方法(RFノックアウト法、特許文献2)も提案されている。この方法では中心運動量を変位させないため、中心運動量をもつ粒子の周回周波数(中心周波数)は理想的には一定であり、電極に印可する高周波信号は、ベータト
ロン振動数に同期する周波数成分を含む。このとき粒子のチューンが厳密には連続的な分をもっていることを考慮して、周波数帯域を広げることでより効果的な出射が可能である。
【0007】
近年、円形加速器を利用した粒子線治療では、患者毎の治療補助具が不要でかつ高精度にがん部位を照射できるスキャニング照射方法が求められている。スキャニング照射では、一般に照射系の2個の2極電磁石によりビームを2次元に走査し、さらにエネルギーを調整することで深さ方向にも走査して目標部位を照射する。同一エネルギーのビームを、原則、停止せずに照射し続けるスキャニング照射方法(ラスタースキャニング照射、例えば特許文献3)の場合、時間的に高い安定度をもった照射ビーム電流強度が要求される。安定度が高いほど照射線量の管理が易しくなり、照射ビーム電流量を増やすことができるため照射時間が短くてすむ。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−086399号公報
【特許文献2】特開平5−198397号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の出射方法は出射専用の高周波電極を必要としないという特長がある。しかしながら、スキャニング照射方法において、照射時間を短くするために照射ビーム電流強度の時間安定度の向上や、そのための調整の容易さを考えた場合、以下の課題があった。出射されるビームは、横方向(ビームの進行方向に対して垂直な方向)の位相平面における粒子分布や、縦方向(ビーム進行方向)のRFバケット内部の粒子の分布を反映する。このため、照射ビーム電流の安定度を向上させようとした場合、高周波加速空洞に印加する高周波電圧の周波数、周波数の変化速度、円形加速器を構成する複数の電磁石の磁場等の、より精密な調整が必要であるため、調整が容易ではない場合や、調整時間が長くなる場合があった。
本発明では、上記の課題を解決し、出射ビーム電流の時間安定度向上と、その調整が容易で調整時間が短い円形加速器を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る円形加速器は、荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、この高周波発生装置が発生する高周波を制御する高周波制御装置と、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、荷電粒子を周回軌道から取り出すための出射装置と、この出射装置によって出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器において、高周波制御装置は、出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、ビーム電流検出器の検出信号と目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定する周波数決定部と、を備え、この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、決定された次の周波数の高周波を高周波発生装置が発生するようにしたものである。
【発明の効果】
【0011】
この発明によれば、制御が安定で、かつ調整が簡単で調整時間が短い円形加速器が得られる。
【図面の簡単な説明】
【0012】
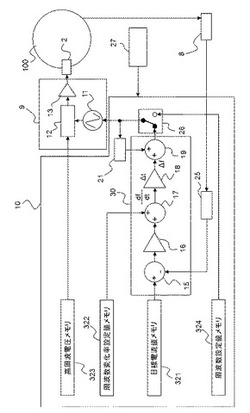
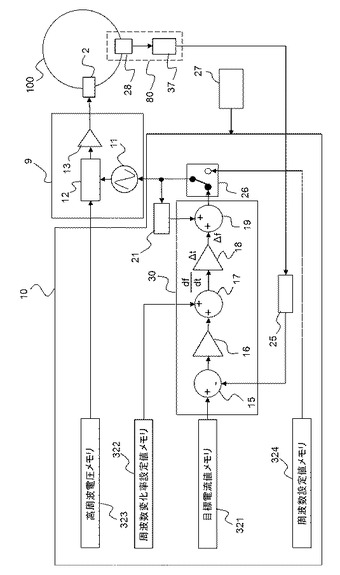
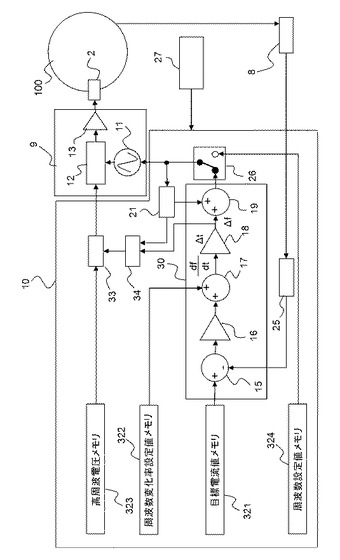
【図1】本発明の実施の形態1による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
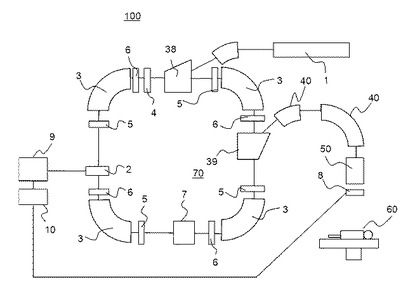
【図2】本発明の実施の形態1による円形加速器全体における必要構成機器を示すブロック図である。
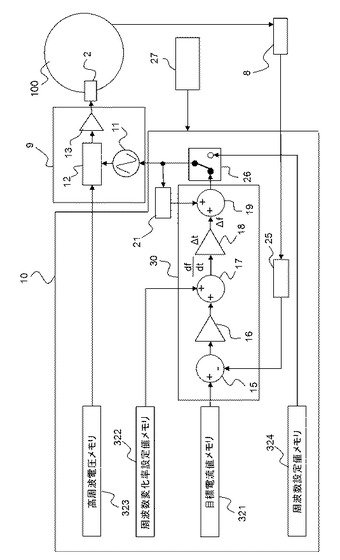
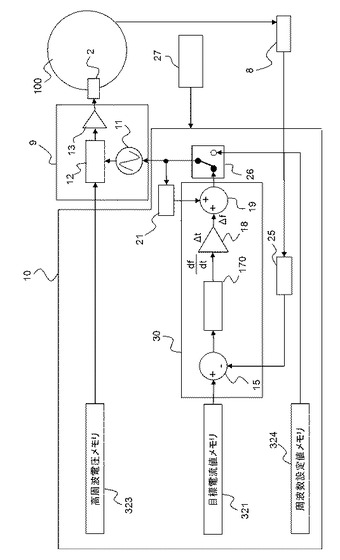
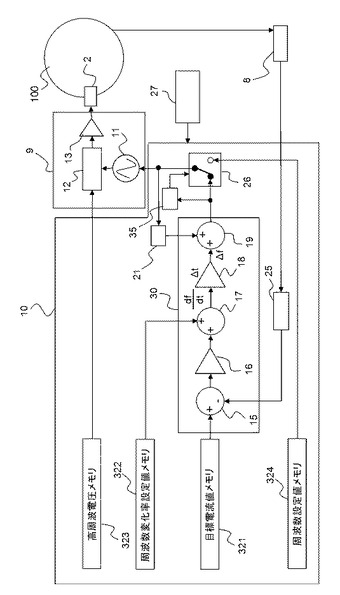
【図3】本発明の実施の形態1による円形加速器の要部である高周波制御装置の別の構成を詳細に示すブロック図である。
【図4】本発明の実施の形態1による円形加速器の要部である高周波制御装置のさらに別の構成を詳細に示すブロック図である。
【図5】本発明の実施の形態2による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
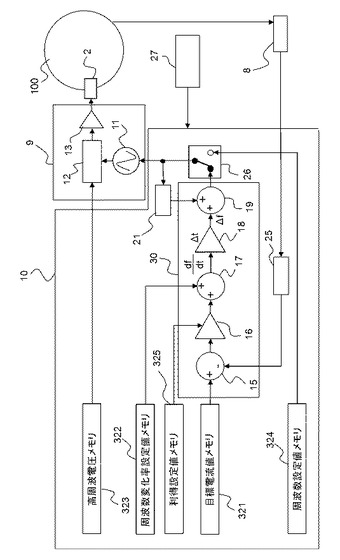
【図6】本発明の実施の形態3による円形加速器要部である高周波制御装置の構成を詳細に示すブロック図である。
【図7】本発明の実施の形態4による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図8】本発明の実施の形態5による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図9】本発明の実施の形態6による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図10】本発明の実施の形態7による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
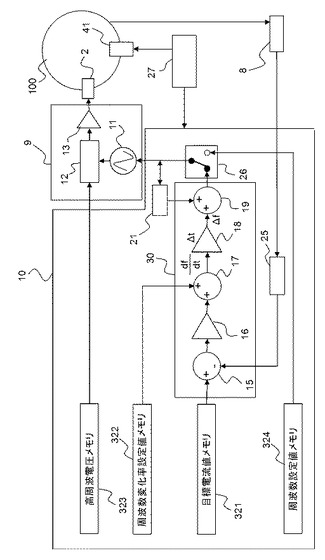
【図11】本発明の実施の形態8による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
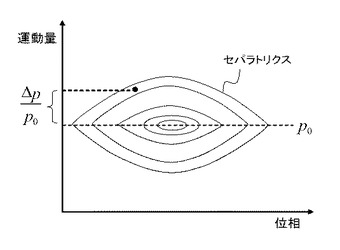
【図12】本発明の基礎となるシンクロトロン振動を説明する図である。
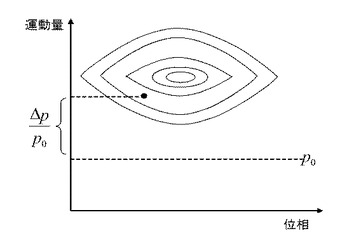
【図13】本発明の基礎となる加速中(出射中)のシンクロトロン振動を説明する図である。
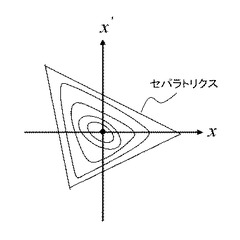
【図14】本発明の基礎となる3次共鳴励起時のベータトロン振動とセパラトリクスを説明する図である。
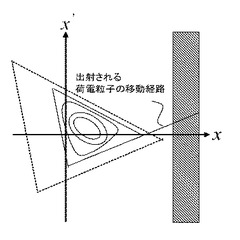
【図15】本発明の基礎となる出射中のベータトロン振動とセパラトリクスを説明する図である。
【発明を実施するための形態】
【0013】
まず、本発明における円形加速器の基本的な理論を述べる。円形加速器が円形加速器内に設置された、高周波加速空洞の電界により加速するタイプの場合、ビームの進行方向に対して直行した2方向のベータトロン振動以外に、ビームの進行方向にビームが振動しながら荷電粒子が安定に加速される。この振動はシンクロトロン振動と呼ばれている。シンクロトロン振動をしている荷電粒子は、設計された、基準となる出射前の周波数f0および磁場強度B0に対して、円形加速器内部の磁場強度のずれΔB/B0と、ビームが受ける高周波電圧の周波数の変位Δf/f0を用いて、式(1)で表現される。
【0014】
【数1】

ここで、
α:モーメンタムコンパクションファクタ、運動量変位に対する軌道周長の変化の割合
γ:出射の際のエネルギーを静止エネルギーで割った値
f0:設計周波数
p0:設計運動量
B0:設計偏向磁場
【0015】
特許文献1の出射方法で偏向電磁石の磁場を一定(ΔB=0)にした場合、周波数の変位量と運動量変位量の関係は式(2)で表される。
【数2】
【0016】
円形加速器からビームを出射する際のシンクロトロン振動とベータトロン振動についてさらに詳しく説明する。シンクロトロン振動の例を、図12を用いて説明する。図12の横軸はビームの各粒子が受ける高周波電圧の位相、縦軸は運動量を表している。偏向磁場が一定の場合(ΔB=0)、高周波電圧の周波数を変化させる(上記式のΔfを変化させる)と、式(2)からわかるように、ビームは加速されて運動量も変化していく。この様子を図13に示す。
【0017】
一方、ビームの進行方向に対して直行する方向(以下、横方向と呼ぶ)を見た場合、横軸を位置x、縦軸を軌道の傾きx‘とした場合、ビームはベータトロン振動とよばれる安定な周回運動をしている。出射する際は、例えば3次共鳴の場合、円形加速器内の六極電磁石により3次共鳴を励起させ、ベータトロン振動を安定領域と共鳴領域に分割する。すなわち、図14に示すように、振動の安定領域と不安定領域の境界にセパラトリクスを形成させる。この状態で高周波電圧の周波数を変化させて運動量を変化させることでチューンが変化し、図15のように、破線の三角形で示す加速中のセパラトリクスの領域が出射時には実線で示す三角形の領域に変化して安定領域を狭めるため、粒子が不安定領域に追い出される。セパラトリクス外の不安定領域に出た荷電粒子は共鳴により振幅が急激に増大する。このとき例えば、出射用電極の位置で図15の斜線の位置に電界が発生されるように電極を設ければ、振幅が増大してこの位置まできた荷電粒子に電界による力を与えて、軌道を変えることができる。例えば外側に軌道を変えられた荷電粒子は、最後に、出射用電磁石で軌道を大きく曲げて加速器から取り出される。
【0018】
本出射方法では、一度Δfをある値、例えばΔf=Δf1、つまり高周波加速空洞に印加される高周波電圧の周波数をf+Δf1にして中心運動量をp+Δp1に変化させて、出射させる。その後、高周波電圧の周波数をもう一度同じ周波数f+Δf1に設定しても、この条件で出射される荷電粒子はすでに出射されており、さらに周波数を変化させなければ出射しない。そこで、周波数を変化させ続けることでdp/pを増加させ続け、出射させるようにする。本発明は、この出射方法の円形加速器において、より安定にビーム電流強度を制御でき、調整が容易な円形加速器を得ることを目的として行われた。
【0019】
なお、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割の方法としては、六極電磁石により3次共鳴を励起する方法以外にも種々あるが、本明細書においては、六極電磁石により3次共鳴を励起する方法を例にして説明する。すなわち、本明細書では、六極電磁石がベータトロン振動を安定領域と共鳴領域に分割する領域分割装置となるが、この領域分割装置は六極電磁石に限らない。
【0020】
実施の形態1.
図1は、本発明の実施の形態1による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図、図2は本実施の形態1による円形加速器全体における必要構成機
器を示すブロック図である。イオンビーム発生装置を含む初段加速器1によって十分なエネルギーまで加速された荷電粒子は、入射装置38を経て円形加速器本体100に入射され、円形加速器本体100内で目的のエネルギーまで加速される。荷電粒子は、円形加速器本体100内の高周波加速空洞2で加速される。また、円形加速器本体100には、偏向電磁石3が設けられており、荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する。円形加速器本体100で加速された荷電粒子は出射前に六極電磁石4により3次共鳴を励起してセパラトリクスを形成することで、ベータトロン振動を安定領域(セパラトリクスの内側)と共鳴領域(セパラトリクスの外側)に分割する。すなわち、六極電磁石4が、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置を構成する。四極電磁石5はベータトロン振動数およびセパラトリクスの面積を調整するために用いられる。また、六極電磁石6が、クロマティシティを調整する。
【0021】
円形加速器本体100内部では、荷電粒子群は偏向電磁石3の磁場から一意的に決まる中心運動量をもち、その中心運動量近傍に分布している。このとき、たとえば高周波加速空洞2を用いて中心運動量を変位させ、ベータトロン振動の安定領域(セパラトリクスの面積)を狭めることで荷電粒子を共鳴領域に追い出す。共鳴領域に入った荷電粒子は共鳴によりx方向の振幅が増大し、例えば出射用電極7の電界を感じる領域に到達すると出射チャネルの方に電界による力で導かれ、出射用電磁石39によって軌道を円形加速器外の方向に曲げられて出射される。つまり、出射用電極7と出射用電磁石39とで出射装置70を構成する。
【0022】
円形加速器本体100から出射された荷電粒子ビームは、通常いくつかの輸送系の電磁石群40と真空ダクトから構成される輸送系で利用される位置まで導かれる。図2では、荷電粒子ビームを粒子線治療装置に利用する例を示しており、輸送系で荷電粒子ビームが照射装置50に導かれ、照射装置50によって、患者60の患部に走査して照射、すなわちスキャニング照射される。高周波加速空洞2に印加する高周波を出力する高周波発生装置9は、照射装置50によって照射される荷電粒子ビームの電流量を測定するビーム電流検出器であるビームモニタ8の検出信号であるビーム電流信号をフィードバック信号として、高周波制御装置10により制御される。
【0023】
次に、図1を用いて、高周波制御装置10によるビーム電流量制御について説明する。本実施の形態1では、ビームモニタ8で検出したビーム電流信号をフィードバック信号として、高周波加速空洞2に印加する高周波の周波数をフィードバック制御する。式(1)からわかるように、運動量を変位させるには、磁場を変化させる方法、周波数を変化させる方法、もしくはその両方を変化させる方法がある。偏向電磁石3の磁場の変化は、高周波の周波数を変化させるのに比べて応答速度が遅いため、高周波加速空洞2に印加する高周波の周波数を制御するのが最も効果的である。
【0024】
ここで、円形加速器の運転において荷電粒子の加速、減速、出射の開始、終了のタイミングは外部のタイミングシステム27からのタイミング信号により行う。タイミングシステム27から送られてくるタイミング信号により、高周波制御装置10は、タイミングに対応した電圧信号および周波数を高周波発生装置9に送る。電圧信号は高周波電圧メモリ323に記憶されており、この電圧信号は振幅制御器12に送られる。周波数の制御については、タイミングシステム27から送られてくるタイミング信号が切替スイッチ26を制御して、制御を切り替える。出射期間以外においては、加速等に必要な周波数が記憶されている周波数設定値メモリ324の周波数データを直接高周波発生装置9に送る。すなわち、出射期間以外においてはフィードフォワード制御により周波数が決定される。一方、出射中は、周波数決定部30がフィードバック制御により決定する周波数データを送る。ただし、例えば、出射期間中もフィードバック制御を行わない場合、あるいは一部の期間フィードバック制御を行わない場合など、周波数設定値メモリ324には、出射期間の周波数が記憶されていることもある。
【0025】
フィードバック制御系である高周波制御装置10は、以下のように構成されている。使用に必要な、例えば粒子線治療装置の場合、治療に必要な照射線量から決まる荷電粒子の量、すなわちビーム電流の値が目標電流値として目標電流値メモリ321に記憶されている。円形加速器本体100から、この目標電流値の荷電粒子を取り出すために高周波の周波数を変化させる割合、すなわち周波数変化率が周波数変化率設定値メモリ322に記憶されている。この周波数変化率設定値メモリ322に記憶されている周波数変化率は、通常、出射開始からの時系列のデータとして記憶されている。
【0026】
電流比較器15が、ビームモニタ8で測定したビーム電流信号(フィードバック信号)をローパスフィルタ25でフィルタリングした信号と、目標電流値メモリ321に記憶されている目標電流値との誤差信号を出力する。周波数変化率補正値演算器16において、電流比較器15の出力である誤差信号に対して比例・積分・微分(PID)演算を実施し、適切な周波数変化率補正値を決定する。適切な周波数変化率補正値を決定するためのPID演算の利得は、例えば事前に測定した制御系の伝達関数や、解析により求める。
【0027】
次に、周波数変化率補正器17において、周波数変化率補正値演算器16で決定した周波数変化率補正値に周波数変化率設定値メモリ322に記憶されている周波数変化率設定値を加えることで、周波数変化率df/dtを決定する。乗算器18において、周波数変化率加算器17で決定した周波数変化率df/dtに高周波制御装置10のクロック周期Δtを掛け合わせて、周波数変化値Δfを演算する。周波数制御器19において、周波数メモリ21に記憶されている、現在の周波数の値から、乗算器18で求めた周波数変化値Δfを加算することで、1クロック後、すなわち次に高周波発生装置9が発生する周波数を決定する。
【0028】
以上のように、電流比較器15、周波数変化率補正値演算器16、周波数変化率補正器17、乗算器18および周波数制御器19により構成される周波数決定部30において、ビームモニタ8の検出信号と目標電流値メモリ321に記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率設定値メモリ322に記憶された周波数変化率を補正して周波数を決定する。
【0029】
高周波信号発生器11(例えばダイレクトデジタルシンセサイザー)は、周波数制御器19から出力される周波数の値を入力信号として、所定の周波数の高周波信号を出力する。また、周波数メモリ21に周波数制御器19が決定した周波数を記憶させる。振幅制御器12において、高周波信号発生器11から出力された高周波信号の電圧を、高周波電圧メモリ323から出力される所定の電圧値にして、所定の電圧値の高周波信号を高周波増幅器13で増幅し、高周波加速空洞2に印加する。これら、高周波信号発生器11、振幅制御器12、および高周波増幅器13で高周波発生装置9を構成する。
【0030】
なお、一般に円形加速器では光速に近い速度まで粒子を加速するため、高周波制御装置10は、1/1000秒以下での高速制御が求められる。これを実現するためには、一般にメモリ部分を除く高周波制御装置10には、FPGA(Field-Programmable Gate Array)や
DSP(Digital signal processor)が用いられる。
【0031】
また、本発明を粒子線治療装置に適用する場合、粒子線治療装置における目的は患部への的確なビーム照射であるため、ビームモニタ8は、できるかぎり患者近くに置くことが好ましい。一方で高周波の周波数を制御する高周波制御装置10は、デジタル機器であるため放射線が発生している場には置かず、離れた場所に置かれることが多い。そのためビ
ームモニタ8と高周波制御装置10の間での信号伝送距離が数十m以上となる場合があり
、フィードバック制御の伝送損失やノイズによる信号劣化によりフィードバック制御の効果が低下する恐れがある。このような場合、ビームモニタ8から高周波制御装置10の間に電気光変換装置および光電気変換装置を設けて光信号でフィードバック信号を伝送することでこの劣化を防ぐことができる。さらに、図1では、ビームモニタ8からの信号を、ローパスフィルタ25を通して電流比較器15に入力している。このローパスフィルタ25は必ずしも必要ではないが、ノイズ等のフィードバック信号の高周波成分はフィードバック制御の不安定性の原因となるため、例えば数kHz以上の高周波信号を減衰させるローパスフィルタ25を用いることが好ましい。
【0032】
フィードバック制御が電流を目標値どおりに制御するのに効果的である理由を説明する。本出射方法では中心周波数を変位させることで運動量を変位させ、荷電粒子ビームを円形加速器本体100から出射させる。しかし、横方向(ビームの進行方向に対して垂直な方向)の位相平面における粒子分布や、縦方向(ビーム進行方向)のRFバケット内部の粒子の分布をあらかじめ知ることは困難であるため、スキャニング照射のために時間的に高い安定度をもった荷電粒子ビームを出射させることは非常に難しかった。また、偏向電磁石3の磁場は電源リップル等の現実には避けがたい要因により時間に対して揺らぐため、厳密には偏向電磁石3の磁場誤差ΔBを0にすることは難しく、これが原因で運動量が揺らいでしまう。さらに偏向電磁石3以外の磁石、例えば四極電磁石5においても、磁場誤差はチューンの変化に寄与する。これらの磁場誤差が含まれると、予め決めたΔfを用いてフィードバック制御することでビーム電流を制御することはいっそう難しくなるという課題があった。
【0033】
さらに本出射方法において、たとえばΔf(周波数は中心周波数f0+Δf)のフィードバック制御を試みた場合、一度、ある周波数で出射させた後に、もう一度同じ周波数に戻しても同程度の出射電流は得られない。その周波数で出射される荷電粒子はすでにほとんど出射済みだからである。厳密にはRFバケット内の荷電粒子はシンクロトロン振動しているため、同じ周波数でもある程度はビームが出射し続ける。また磁場誤差があった場合は、dp/pが同じでなければ、同じ周波数でも出射される可能性はある。以上から、一般に加速を安定にするために行われるΔfフィードバック制御を出射ビーム電流制御に適用しても、出射ビーム電流を時間に対して一定に制御することは困難であった。
【0034】
シンクロトロンからのビーム出射の物理を考えたとき、出射されるビーム電流量は、中心周波数f0に対してどれだけの周波数変化量Δfとなっているかによるのではないことがわかる。その時間における出射ビーム電流量を決定づけているのは、現在の周波数が過去の周波数に対してどれだけ変化しているか、つまり周波数の時間に対しての傾き(周波数変化率)である。本発明者らは、このことに注目し、周波数変化率の補正値を求め、フィードバック制御をかける場合、あらかじめ設計から知りえるf0ではなく、リアルタイムでしか判明しない周波数値から、この周波数変化率補正値を用いて次の周波数の値を演算することが効果的であることを見出した。
【0035】
以上の制御を式で表すと、式(3)のように表され、ある時間tにおける周波数をf(
t)と表したとき、f(t)の時間変化率df(t)/dtをフィードバック制御することで出射ビーム電流強度を効果的に制御できることが見出された。
【数3】
【0036】
式(3)の制御を行うため、周波数を記憶させる周波数メモリ21を備えたことが、本発明のフィードバック制御系の一つの特徴となる。このとき、目標電流値の荷電粒子を出射させるための周波数変化率のおおよその値は設計可能であるため、周波数変化率の設定値をあらかじめ決めておき周波数変化率設定値メモリ322に記憶させる。式(4)のように、この周波数変化率設定値からの補正値をフィードバック制御するとフィードバック利得が小さくすみ、制御はより安定する。
【数4】
なお、式(3)、式(4)における・は、時間微分を表す。この式(4)を実現したのが図1の構成である。
【0037】
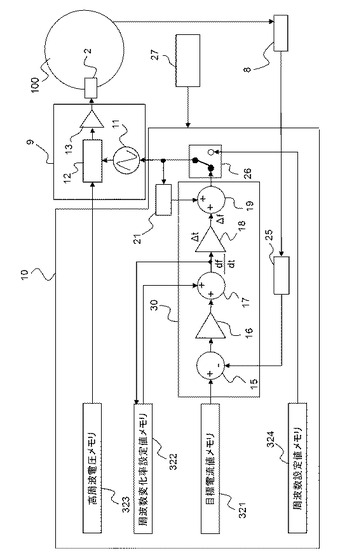
また、式(3)を直接実現する構成にしても良い。すなわち、図3のような構成とする。図3において、図1と同一符号は、同一または相当する部分を示す。図3の構成においては、図1で示す周波数変化率設定値メモリ322を備えていない。目標電流値メモリ321に記憶されている目標電流値とビームモニタ8で測定されるビーム電流信号との差分である誤差信号を電流比較器15が出力する。周波数変化率演算器170において、電流比較器15の出力である誤差信号から直接演算により周波数変化率を求める。求めた周波数変化率を用いて、乗算器18、周波数制御器19において、次の、すなわち1クロック後の周波数を決定する。
【0038】
さらに、円形加速器から出射されるビーム電流値を、円形加速器内の残留ビーム電流の信号を用いて得ることもできる。残留ビーム電流モニタとしては、例えばDCCT(DC current transformer)を用いることができる。図4が、残留ビーム電流モニタ28としてDCCTを用いた構成例である。図4において、図1と同一符号は、同一または相当する部分を示す。DCCTは、円形加速器内の残留ビーム電流量を測定するモニタであるため、図1のビームモニタ8と異なり、残留ビーム電流値の時間変化が、出射されるビーム電流値となる。このため、微分演算器37を使用する。微分演算器37の出力信号がビーム電流値となるため、この信号をフィードバック信号として用いることができる。すなわち、残留ビーム電流モニタ28と微分演算器37とで、ビーム電流検出器80を構成する。
【0039】
以上のように、本発明の実施の形態1による円形加速器では、目標電流値メモリ321に出射装置70により出射させる荷電粒子のビーム電流の目標電流値を記憶させ、周波数決定部30において、ビーム電流検出器の信号と目標電流値メモリ321に記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定するようにしたので、制御が安定で、簡単な調整で安定した目標通りのビーム電流を出射できる円形加速器が得られる。
【0040】
実施の形態2.
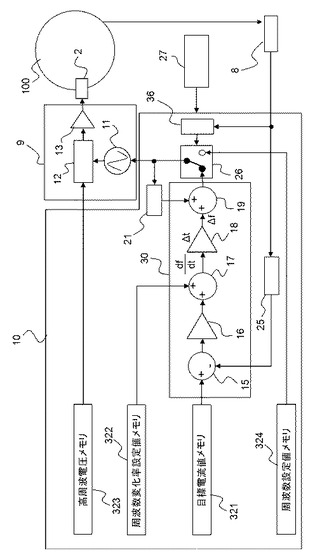
図5は、本発明の実施の形態2による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図5において、図1と同一符号は、同一または相当する部分を示す。本実施の形態2では、高周波制御装置10の内部に、ビームモニタ8の信号を参照する内部タイミングシステム36を設けた。実施の形態1では、円形加速器の運転において加速、減速、出射の開始、終了のタイミングは外部のタイミングシステム27からのタイミング信号により行い、出射中は、フィードバック制御により決定される周波数を、高周波制御装置10が高周波発生装置9に出力するようにした。
【0041】
しかしながら、出射を完全にフィードバック制御のみで行うと、出射開始直後は出射される荷電粒子はほとんどないため、非常に大きなフィードバック利得がかかることにより出射されるビーム電流にオーバーシュートがでてしまう可能性がある。あらかじめフィードバック利得を小さく設定することも可能であるが、利得を小さくしすぎるとビーム電流の立ち上がり時間がかかる。これを解決する手段として、あるビーム電流が出射されはじめるまでは周波数設定値メモリ324のデータを使ったフィードフォワード制御で行い、その後はフィードバック制御に切り替えることで、立ち上がりが速く、かつ安定なビーム電流の制御が可能となる。
【0042】
ビーム電流をモニタして切り替えを行うためにビーム電流信号を一度、高周波制御装置10外部のタイミングシステム27に送ると、遅延が生ずる恐れがある。このため、高周波制御装置10内部でビーム電流をモニタして切り替えを行うようにしたほうが、より高速にフィードフォワード制御からフィードバック制御への切り替えが行えるため効果的である。本実施の形態2では、高周波制御装置10の内部に、内部タイミングシステム36を設け、この内部タイミングシステム36が、ビームモニタ8からのビーム電流信号に基づいて切替スイッチ26に指令を出して、フィードフォワード制御からフィードバック制御へのスイッチングを行うようにした。これにより、立ち上がりが速く、かつ安定なビーム電流の制御が行える。
【0043】
また、出射を開始してからフィードバック制御を開始するまでの最適な時間が予めわかっている場合、ビームモニタ8からのビーム電流信号に基づいてフィードフォワード制御からフィードバック制御への切り替えを行う代わりに、あらかじめ設定した、出射開始から所定の時間経過後にフィードフォワード制御からフィードバック制御に切り替えるようにすることで、高速に目標電流どおりの制御が可能となる。
【0044】
なお、ビーム電流信号は、図4で示した残留ビーム電流モニタ28と微分演算器37によるビーム電流検出器80の信号を用いても良いのは言うまでもない。以後の実施の形態においても、同様である。
【0045】
実施の形態3.
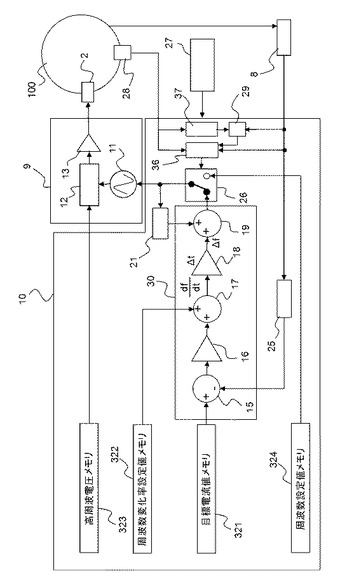
図6は、本発明の実施の形態3による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図6において、図1、図4および図5と同一符号は、同一または相当する部分を示す。本実施の形態3では、円形加速器内の残留ビーム電流値を測定する残留ビーム電流モニタ28を設けた。残留ビーム電流モニタ28の信号を微分演算器37により微分演算して求められるビーム電流値と、ビームモニタ8により測定されるビーム電流値が同じでなければ、出射されたビームがシンクロトロンからビームモニタ8までの間でロスしていることがわかる。このため、両者を比較する比較器29からの信号を、内部タイミングシステム36に送ることで出射停止用の信号として利用することが可能である。
【0046】
さらに、残留ビーム電流モニタ28からの信号は円形加速器内の残留ビーム電流値信号であるため、内部タイミングシステム36が残留ビーム電流モニタ28自身の信号により判断して、残留ビームが少なくなった場合に出射を終了させることも可能である。残留ビームが少なくなると、いくらフィードバック制御をかけても出射されるビーム電流を制御することは不可能となるため、この場合の制御不安定な出射を回避する効果がある。
【0047】
実施の形態4.
図7は、本発明の実施の形態4による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図7において、図1と同一符号は、同一または相当する部分を示す。実施の形態1で説明したように、本出射方法の場合、出射されるビームは、横
方向の位相平面における粒子分布や、縦方向のRFバケット内部の粒子の分布を反映することになるが、これらの粒子分布をあらかじめ知ることは難しい。よって、フィードフォワード制御により、出射されるビーム電流値を精確に目標電流値に制御することは難しい。本発明では、周波数変化率をフィードバック制御することとしたので、運動量変位率の変化する速さを制御することで出射ビーム電流を安定化することができ、磁場変動による外乱の効果をフィードバック制御により小さくできる。このうち前記の効果は再現性が高いため、フィードバック後に決定した周波数変化率を、例えば周波数変化率設定値メモリ322に格納しておき、次の加速時の出射のときには、予め設計により決めた周波数変化率設定値のデータを用いずに、前回のフィードバック制御で得られた周波数変化率データを用いる。その上で、磁場変動の外乱の効果はこのデータの補正値とすることでフィードバック利得を小さくすることが可能となる。本実施の形態4による制御方法では、フィードバック利得が小さいため制御の安定性がさらに高い効果がある。
【0048】
実施の形態5.
図8は、本発明の実施の形態5による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図8において、図1と同一符号は、同一または相当する部分を示す。本実施の形態5では、現在の周波数値と、次の周波数を決定するためのΔf値から電圧値を求める電圧演算器34と、高周波電圧メモリ323からの電圧値と電圧演算器34で求めた電圧値を切り替えるための切替スイッチ33を設けた。本出射方法では、運動量変位を変化させて(エネルギーを増加させて)出射を行うため、最適な電圧値が時々刻々と変化する。フィードフォワード制御で出射を行った場合は、あらかじめ周波数の値がわかるため、加速されるエネルギーの値が事前にわかり、その結果、最適な電圧値を事前に予測して、これを高周波電圧メモリ323に格納しておき、フィードフォワード制御で電圧を変化させる。
【0049】
一方、フィードバック制御を行った場合、出射してからの経過時間に対して、厳密な周波数の値を事前に知ることができない。高周波加速空洞2に印加される電圧値が最適な値ではない場合、図13のバケットから粒子が外に漏れる(バケットから漏れた粒子は周波数を変化さえても加速されない)ため、出射効率が下がる。このため、現在の周波数の値と次の周波数値を決めるためのΔfの値から演算して次の電圧値を決める。この演算により振幅制御器12に送られる電圧値は図13のバケット(セパラトリクスの内側)の面積を小さくしないような値となる。このように、フィードフォワード制御時は高周波電圧メモリ323に記憶された電圧値を高周波発生装置9に送り、フィードバック制御時は切替スイッチ33により切り替え、電圧演算器34で求めた電圧値を高周波発生装置9に送るようにした。この構成により、フィードバック制御中も現実の周波数に対応した、最適な電圧値の高周波が高周波加速空洞2に印加されるため、出射効率を高める効果がある。
【0050】
実施の形態6.
図9は、本発明の実施の形態6による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図9において、図1と同一符号は、同一または相当する部分を示す。本実施の形態6では、周波数比較器35を設けた。本出射方法ではビームを加速して運動量を変化させながら出射を行う。フィードバック制御を行わない場合は、事前に周波数の値が決まっているため、出射中に到達するエネルギーがあらかじめわかる。よって出射させたいエネルギーの範囲内の周波数変化にあらかじめ設計できる。しかしながらフィードバック制御をした場合、最終的に到達周波数の値が事前にわからない。つまり、出射されるエネルギー範囲が事前に予測できない。そこで予め決定した最終到達周波数の値を保持し、この値とフィードバック後の周波数の値とを比較する周波数比較器35を設けた。周波数比較器35により、フィードバック後の周波数が最終到達周波数まで変化したと判断された場合、フィードバック制御を停止するフィードバック制御停止信号をスイッチ26に送るとともに、円形加速器内に残留する粒子を捨てて、加速の初期化を行う。これにより、フィードバック制御を効果的に使えかつ、設計のエネルギー範囲の出射を行うことができる。
【0051】
実施の形態7.
図10は、本発明の実施の形態7による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図10において、図1と同一符号は、同一または相当する部分を示す。本実施の形態7では、周波数変化率補正演算器16の利得を時間によって変化させるため、予め利得の設定値の時間変化を記憶する利得設定値メモリ325を設けた。本出射方法ではRFバケット内部の粒子分布の影響を強く受け、また横方向の位相平面における粒子分布も影響する。よって、出射開始後の時間経過に適したフィードバック利得の値が異なる。特に出射後半はRFバケット内の荷電粒子の大半が出射されているため、ビーム電流量は低下しやすく、フィードバック利得は大きくしたほうが制御は効果的となる。本実施の形態7では、周波数変化率補正演算器16で使用される利得を、予め決定した、出射開始からの時間毎の利得を記憶する利得設定値メモリ325から読み出し、出射開始してからの時間帯によって利得を変えることによって、フィードバック制御をより効果的にすることが可能となる。
【0052】
実施の形態8.
図11は、本発明の実施の形態8による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図11において、図1と同一符号は、同一または相当する部分を示す。本実施の形態8では、円形加速器本体100に、高速四極電磁石41を設けた。スキャニング照射では、照射する深さ方向の位置は、荷電粒子のエネルギーにより決定し、異なるエネルギーの荷電粒子を照射することで異なる深さ方向の位置に照射する。すなわち、エネルギーを変えることにより、深さ毎に決められた照射範囲(スライスと呼ぶ。ただし、厳密には体内不均一性、体型によって単一エネルギーで照射しても完全に同じ深さにはならない。)を照射する。出射されるエネルギーは、円形加速器の加速で決まるため、1回の入射による加速において同一エネルギー(同一スピル)で出射可能である。一方、照射対象において、重要臓器を避ける、飛び地になっている等、また体内の動きにあわせて出射する(例えば呼吸同期照射)等で一時的に出射を停止することが必要な場合がある。出射を停止するには、タイミング信号でフィードバック制御を停止し、周波数の変化する方向を急速に逆転させることで出射を停止させる方法がある。すなわち、周波数を下げて出射していた場合は上げる。周波数を上げて出射していた場合は下げる。タイミング信号により出射を再開した後は、再びフィードバック制御を開始する。しかしながら、このような方法では、停止のために周波数を変化させるため、出射開始後のフィードバック制御が不安定になる場合も考えられる。そこで、本実施の形態8では、周波数メモリ21の値を呼び出し続けることにより周波数を変化させずに、インダクタンスが小さく高速に応答する高速四極電磁石41を励磁して出射を一時停止させる。この場合、周波数メモリ21の値を呼び出し続けることにより周波数の値をホールドするだけで良いため、制御が容易となる。上記方法を用いて出射の一次停止、再出射が可能になれば1回の入射で加速されたシンクロトロン内のビームの利用効率が高まるため、照射時間を短縮できる。
【0053】
また、スキャニング照射では、一般に照射系の2個の2極電磁石によりビームを2次元に走査し、さらにエネルギーを調整することで深さ方向にも走査して目標部位を照射する。このとき、照射部位ごとに必要な照射量は異なる。本発明の電流調整方法は、ビームのエネルギーによらず適用可能であるため、異なるエネルギーのスピル(1回の入射、加速、出射で出射されるビーム電流の時間波形のことをスピルと呼ぶ。)ごとに、電流比較器15に送る目標電流値を変更することで、適した強度のビーム電流を出射することができる。また、深さごとに決められた照射範囲内でも、すなわち同一エネルギーのスピルにおいても、周縁部や照射部位全体の形状によって必要な照射量は位置によって異なる。このような場合、同一スピルにおいて、電流比較器15に送る目標電流値を時系列に変化させることで、同一エネルギーでビーム電流強度を変更することが可能となる。
【0054】
ビーム電流強度が変更できれば、予定照射量が大きい位置には大きい強度で、弱い位置には小さい強度で照射できるため、線量管理が容易となり、照射時間を短縮できる。さらに、実施の形態2で説明したように、フィードフォワード制御からフィードバック制御に切り替えるタイミングや、周波数変化率加算器17のフィードバックゲインを調整することで、スパイクのない、目標どおりのビーム電流変更が可能となる。
【符号の説明】
【0055】
1:初段加速器 2:高周波加速空洞
3:偏向電磁石 4:六極電磁石
7:出射用電極 8:ビームモニタ(ビーム電流検出器)
9:高周波発生装置 10:高周波制御装置
15:電流比較器 16:周波数変化率補正値演算器
17:周波数変化率補正器 18:乗算器
19:周波数制御器 21:周波数メモリ
26:切替スイッチ 28:残留ビーム電流モニタ
30:周波数決定部 35:周波数比較器
36:内部タイミングシステム 37:微分演算器
70:出射装置 80:ビーム電流検出器
100:円形加速器本体
321:目標電流値メモリ 322:周波数変化率設定値メモリ
323:高周波電圧メモリ 324:周波数設定値メモリ
325:利得設定値メモリ
【技術分野】
【0001】
この発明は、粒子線治療装置などに用いるために、高周波電圧により荷電粒子を加速して、加速された荷電粒子を取り出す円形加速器に関する。
【背景技術】
【0002】
シンクロトロン等の円形加速器で荷電粒子を周回加速させ、高エネルギーまで加速された荷電粒子をその周回軌道から取り出し、ビーム状となった荷電粒子(荷電粒子ビーム、粒子線とも称する)をビーム輸送系で輸送して所望の対象物に照射する物理実験や、癌の治療などの医療用として利用することが行われている。シンクロトロンは、荷電粒子ビームを長時間周回させるための真空ダクト、周回軌道や荷電粒子ビームサイズを制御するための偏向磁場や収束磁場を発生する電磁石群、周回周期に同期した高周波電圧(加速電圧とも称する)でビームを加速する高周波加速空洞、高周波加速空洞に加える高周波電圧を制御する高周波発生装置、真空ダクトに荷電粒子を導入する入射装置、荷電粒子を円形加速器外に取り出す出射装置を備える。上記構成要素の中で、高周波発生装置は、加速電圧を発生する高周波源、この高周波の周波数、電圧を制御する高周波制御装置と、発生させた高周波を増幅する増幅器からなる。
【0003】
円形加速器の運転は、入射、加速、出射で構成される。高周波発生装置は、時間的に一様分布の入射ビームに、加速電圧を高周波加速空洞に印加することで、安定加速領域上にビームの塊(バンチ)を形成する。加速中は、高周波加速空洞に印加する加速電圧の周波数を増加させる。円形加速器の一種であるシンクロトロン(円形加速器は周回半径が一定であるシンクロトロンの他に、周回半径が加速とともに大きくなるサイクロトロン等がある。)では、ビームの周回半径を一定にするため、荷電粒子の周回軌道を形成するための偏向電磁石による偏向磁場強度にあわせて、高周波発生装置が加速電圧周波数を制御する。目的エネルギーまで加速されたビームは、最後に出射用磁石により軌道を曲げられ円形加速器外へ取り出す。
【0004】
一般に、円形加速器中の荷電粒子は、設計軌道を中心としてベータトロン振動をしながら周回している。この際、セパラトリクスと呼ばれる安定限界が存在し、安定限界内、すなわち、安定領域の荷電粒子は安定した周回を行うが、安定領域を超えた荷電粒子は振動振幅を増加して発散する性質を有する。この性質を利用して荷電粒子を出射するため、従来の円形加速器においては、四極電磁石を用いて、加速器1周当たりのベータトロン振動数を表すチューンを整数±1/3に近づけ、六極電磁石を励磁(3次共鳴)すること等が行
われる。
【0005】
出射時は例えば、円形加速器の高周波加速空洞に印加する高周波電圧の周波数を変化させることにより、周回する荷電粒子群である荷電粒子ビームの中心運動量を変位させてベータトロン振動の安定領域を狭めて、出射する方式が提案されている(例えば特許文献1)。この方法では、運動量の変位量に応じてビームが出射されるため高周波加速空洞の高周波電圧の周波数を徐々に変化させながらビームの出射が行われる。
【0006】
また、高周波加速空洞とは別に、高周波電圧を発生させる電極を備え、この電極間で発生させた電界で中心運動量は変位させずに、セパラトリクス(ベータトロン振動の安定領域と共鳴領域の境界)一定でベータトロン振動の振幅を大きくし、ビームを安定領域から共鳴領域に追い出すことにより出射する方法(RFノックアウト法、特許文献2)も提案されている。この方法では中心運動量を変位させないため、中心運動量をもつ粒子の周回周波数(中心周波数)は理想的には一定であり、電極に印可する高周波信号は、ベータト
ロン振動数に同期する周波数成分を含む。このとき粒子のチューンが厳密には連続的な分をもっていることを考慮して、周波数帯域を広げることでより効果的な出射が可能である。
【0007】
近年、円形加速器を利用した粒子線治療では、患者毎の治療補助具が不要でかつ高精度にがん部位を照射できるスキャニング照射方法が求められている。スキャニング照射では、一般に照射系の2個の2極電磁石によりビームを2次元に走査し、さらにエネルギーを調整することで深さ方向にも走査して目標部位を照射する。同一エネルギーのビームを、原則、停止せずに照射し続けるスキャニング照射方法(ラスタースキャニング照射、例えば特許文献3)の場合、時間的に高い安定度をもった照射ビーム電流強度が要求される。安定度が高いほど照射線量の管理が易しくなり、照射ビーム電流量を増やすことができるため照射時間が短くてすむ。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−086399号公報
【特許文献2】特開平5−198397号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の出射方法は出射専用の高周波電極を必要としないという特長がある。しかしながら、スキャニング照射方法において、照射時間を短くするために照射ビーム電流強度の時間安定度の向上や、そのための調整の容易さを考えた場合、以下の課題があった。出射されるビームは、横方向(ビームの進行方向に対して垂直な方向)の位相平面における粒子分布や、縦方向(ビーム進行方向)のRFバケット内部の粒子の分布を反映する。このため、照射ビーム電流の安定度を向上させようとした場合、高周波加速空洞に印加する高周波電圧の周波数、周波数の変化速度、円形加速器を構成する複数の電磁石の磁場等の、より精密な調整が必要であるため、調整が容易ではない場合や、調整時間が長くなる場合があった。
本発明では、上記の課題を解決し、出射ビーム電流の時間安定度向上と、その調整が容易で調整時間が短い円形加速器を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る円形加速器は、荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、この高周波発生装置が発生する高周波を制御する高周波制御装置と、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、荷電粒子を周回軌道から取り出すための出射装置と、この出射装置によって出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器において、高周波制御装置は、出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、ビーム電流検出器の検出信号と目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定する周波数決定部と、を備え、この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、決定された次の周波数の高周波を高周波発生装置が発生するようにしたものである。
【発明の効果】
【0011】
この発明によれば、制御が安定で、かつ調整が簡単で調整時間が短い円形加速器が得られる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図2】本発明の実施の形態1による円形加速器全体における必要構成機器を示すブロック図である。
【図3】本発明の実施の形態1による円形加速器の要部である高周波制御装置の別の構成を詳細に示すブロック図である。
【図4】本発明の実施の形態1による円形加速器の要部である高周波制御装置のさらに別の構成を詳細に示すブロック図である。
【図5】本発明の実施の形態2による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図6】本発明の実施の形態3による円形加速器要部である高周波制御装置の構成を詳細に示すブロック図である。
【図7】本発明の実施の形態4による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図8】本発明の実施の形態5による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図9】本発明の実施の形態6による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図10】本発明の実施の形態7による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図11】本発明の実施の形態8による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。
【図12】本発明の基礎となるシンクロトロン振動を説明する図である。
【図13】本発明の基礎となる加速中(出射中)のシンクロトロン振動を説明する図である。
【図14】本発明の基礎となる3次共鳴励起時のベータトロン振動とセパラトリクスを説明する図である。
【図15】本発明の基礎となる出射中のベータトロン振動とセパラトリクスを説明する図である。
【発明を実施するための形態】
【0013】
まず、本発明における円形加速器の基本的な理論を述べる。円形加速器が円形加速器内に設置された、高周波加速空洞の電界により加速するタイプの場合、ビームの進行方向に対して直行した2方向のベータトロン振動以外に、ビームの進行方向にビームが振動しながら荷電粒子が安定に加速される。この振動はシンクロトロン振動と呼ばれている。シンクロトロン振動をしている荷電粒子は、設計された、基準となる出射前の周波数f0および磁場強度B0に対して、円形加速器内部の磁場強度のずれΔB/B0と、ビームが受ける高周波電圧の周波数の変位Δf/f0を用いて、式(1)で表現される。
【0014】
【数1】
ここで、
α:モーメンタムコンパクションファクタ、運動量変位に対する軌道周長の変化の割合
γ:出射の際のエネルギーを静止エネルギーで割った値
f0:設計周波数
p0:設計運動量
B0:設計偏向磁場
【0015】
特許文献1の出射方法で偏向電磁石の磁場を一定(ΔB=0)にした場合、周波数の変位量と運動量変位量の関係は式(2)で表される。
【数2】
【0016】
円形加速器からビームを出射する際のシンクロトロン振動とベータトロン振動についてさらに詳しく説明する。シンクロトロン振動の例を、図12を用いて説明する。図12の横軸はビームの各粒子が受ける高周波電圧の位相、縦軸は運動量を表している。偏向磁場が一定の場合(ΔB=0)、高周波電圧の周波数を変化させる(上記式のΔfを変化させる)と、式(2)からわかるように、ビームは加速されて運動量も変化していく。この様子を図13に示す。
【0017】
一方、ビームの進行方向に対して直行する方向(以下、横方向と呼ぶ)を見た場合、横軸を位置x、縦軸を軌道の傾きx‘とした場合、ビームはベータトロン振動とよばれる安定な周回運動をしている。出射する際は、例えば3次共鳴の場合、円形加速器内の六極電磁石により3次共鳴を励起させ、ベータトロン振動を安定領域と共鳴領域に分割する。すなわち、図14に示すように、振動の安定領域と不安定領域の境界にセパラトリクスを形成させる。この状態で高周波電圧の周波数を変化させて運動量を変化させることでチューンが変化し、図15のように、破線の三角形で示す加速中のセパラトリクスの領域が出射時には実線で示す三角形の領域に変化して安定領域を狭めるため、粒子が不安定領域に追い出される。セパラトリクス外の不安定領域に出た荷電粒子は共鳴により振幅が急激に増大する。このとき例えば、出射用電極の位置で図15の斜線の位置に電界が発生されるように電極を設ければ、振幅が増大してこの位置まできた荷電粒子に電界による力を与えて、軌道を変えることができる。例えば外側に軌道を変えられた荷電粒子は、最後に、出射用電磁石で軌道を大きく曲げて加速器から取り出される。
【0018】
本出射方法では、一度Δfをある値、例えばΔf=Δf1、つまり高周波加速空洞に印加される高周波電圧の周波数をf+Δf1にして中心運動量をp+Δp1に変化させて、出射させる。その後、高周波電圧の周波数をもう一度同じ周波数f+Δf1に設定しても、この条件で出射される荷電粒子はすでに出射されており、さらに周波数を変化させなければ出射しない。そこで、周波数を変化させ続けることでdp/pを増加させ続け、出射させるようにする。本発明は、この出射方法の円形加速器において、より安定にビーム電流強度を制御でき、調整が容易な円形加速器を得ることを目的として行われた。
【0019】
なお、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割の方法としては、六極電磁石により3次共鳴を励起する方法以外にも種々あるが、本明細書においては、六極電磁石により3次共鳴を励起する方法を例にして説明する。すなわち、本明細書では、六極電磁石がベータトロン振動を安定領域と共鳴領域に分割する領域分割装置となるが、この領域分割装置は六極電磁石に限らない。
【0020】
実施の形態1.
図1は、本発明の実施の形態1による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図、図2は本実施の形態1による円形加速器全体における必要構成機
器を示すブロック図である。イオンビーム発生装置を含む初段加速器1によって十分なエネルギーまで加速された荷電粒子は、入射装置38を経て円形加速器本体100に入射され、円形加速器本体100内で目的のエネルギーまで加速される。荷電粒子は、円形加速器本体100内の高周波加速空洞2で加速される。また、円形加速器本体100には、偏向電磁石3が設けられており、荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する。円形加速器本体100で加速された荷電粒子は出射前に六極電磁石4により3次共鳴を励起してセパラトリクスを形成することで、ベータトロン振動を安定領域(セパラトリクスの内側)と共鳴領域(セパラトリクスの外側)に分割する。すなわち、六極電磁石4が、周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置を構成する。四極電磁石5はベータトロン振動数およびセパラトリクスの面積を調整するために用いられる。また、六極電磁石6が、クロマティシティを調整する。
【0021】
円形加速器本体100内部では、荷電粒子群は偏向電磁石3の磁場から一意的に決まる中心運動量をもち、その中心運動量近傍に分布している。このとき、たとえば高周波加速空洞2を用いて中心運動量を変位させ、ベータトロン振動の安定領域(セパラトリクスの面積)を狭めることで荷電粒子を共鳴領域に追い出す。共鳴領域に入った荷電粒子は共鳴によりx方向の振幅が増大し、例えば出射用電極7の電界を感じる領域に到達すると出射チャネルの方に電界による力で導かれ、出射用電磁石39によって軌道を円形加速器外の方向に曲げられて出射される。つまり、出射用電極7と出射用電磁石39とで出射装置70を構成する。
【0022】
円形加速器本体100から出射された荷電粒子ビームは、通常いくつかの輸送系の電磁石群40と真空ダクトから構成される輸送系で利用される位置まで導かれる。図2では、荷電粒子ビームを粒子線治療装置に利用する例を示しており、輸送系で荷電粒子ビームが照射装置50に導かれ、照射装置50によって、患者60の患部に走査して照射、すなわちスキャニング照射される。高周波加速空洞2に印加する高周波を出力する高周波発生装置9は、照射装置50によって照射される荷電粒子ビームの電流量を測定するビーム電流検出器であるビームモニタ8の検出信号であるビーム電流信号をフィードバック信号として、高周波制御装置10により制御される。
【0023】
次に、図1を用いて、高周波制御装置10によるビーム電流量制御について説明する。本実施の形態1では、ビームモニタ8で検出したビーム電流信号をフィードバック信号として、高周波加速空洞2に印加する高周波の周波数をフィードバック制御する。式(1)からわかるように、運動量を変位させるには、磁場を変化させる方法、周波数を変化させる方法、もしくはその両方を変化させる方法がある。偏向電磁石3の磁場の変化は、高周波の周波数を変化させるのに比べて応答速度が遅いため、高周波加速空洞2に印加する高周波の周波数を制御するのが最も効果的である。
【0024】
ここで、円形加速器の運転において荷電粒子の加速、減速、出射の開始、終了のタイミングは外部のタイミングシステム27からのタイミング信号により行う。タイミングシステム27から送られてくるタイミング信号により、高周波制御装置10は、タイミングに対応した電圧信号および周波数を高周波発生装置9に送る。電圧信号は高周波電圧メモリ323に記憶されており、この電圧信号は振幅制御器12に送られる。周波数の制御については、タイミングシステム27から送られてくるタイミング信号が切替スイッチ26を制御して、制御を切り替える。出射期間以外においては、加速等に必要な周波数が記憶されている周波数設定値メモリ324の周波数データを直接高周波発生装置9に送る。すなわち、出射期間以外においてはフィードフォワード制御により周波数が決定される。一方、出射中は、周波数決定部30がフィードバック制御により決定する周波数データを送る。ただし、例えば、出射期間中もフィードバック制御を行わない場合、あるいは一部の期間フィードバック制御を行わない場合など、周波数設定値メモリ324には、出射期間の周波数が記憶されていることもある。
【0025】
フィードバック制御系である高周波制御装置10は、以下のように構成されている。使用に必要な、例えば粒子線治療装置の場合、治療に必要な照射線量から決まる荷電粒子の量、すなわちビーム電流の値が目標電流値として目標電流値メモリ321に記憶されている。円形加速器本体100から、この目標電流値の荷電粒子を取り出すために高周波の周波数を変化させる割合、すなわち周波数変化率が周波数変化率設定値メモリ322に記憶されている。この周波数変化率設定値メモリ322に記憶されている周波数変化率は、通常、出射開始からの時系列のデータとして記憶されている。
【0026】
電流比較器15が、ビームモニタ8で測定したビーム電流信号(フィードバック信号)をローパスフィルタ25でフィルタリングした信号と、目標電流値メモリ321に記憶されている目標電流値との誤差信号を出力する。周波数変化率補正値演算器16において、電流比較器15の出力である誤差信号に対して比例・積分・微分(PID)演算を実施し、適切な周波数変化率補正値を決定する。適切な周波数変化率補正値を決定するためのPID演算の利得は、例えば事前に測定した制御系の伝達関数や、解析により求める。
【0027】
次に、周波数変化率補正器17において、周波数変化率補正値演算器16で決定した周波数変化率補正値に周波数変化率設定値メモリ322に記憶されている周波数変化率設定値を加えることで、周波数変化率df/dtを決定する。乗算器18において、周波数変化率加算器17で決定した周波数変化率df/dtに高周波制御装置10のクロック周期Δtを掛け合わせて、周波数変化値Δfを演算する。周波数制御器19において、周波数メモリ21に記憶されている、現在の周波数の値から、乗算器18で求めた周波数変化値Δfを加算することで、1クロック後、すなわち次に高周波発生装置9が発生する周波数を決定する。
【0028】
以上のように、電流比較器15、周波数変化率補正値演算器16、周波数変化率補正器17、乗算器18および周波数制御器19により構成される周波数決定部30において、ビームモニタ8の検出信号と目標電流値メモリ321に記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率設定値メモリ322に記憶された周波数変化率を補正して周波数を決定する。
【0029】
高周波信号発生器11(例えばダイレクトデジタルシンセサイザー)は、周波数制御器19から出力される周波数の値を入力信号として、所定の周波数の高周波信号を出力する。また、周波数メモリ21に周波数制御器19が決定した周波数を記憶させる。振幅制御器12において、高周波信号発生器11から出力された高周波信号の電圧を、高周波電圧メモリ323から出力される所定の電圧値にして、所定の電圧値の高周波信号を高周波増幅器13で増幅し、高周波加速空洞2に印加する。これら、高周波信号発生器11、振幅制御器12、および高周波増幅器13で高周波発生装置9を構成する。
【0030】
なお、一般に円形加速器では光速に近い速度まで粒子を加速するため、高周波制御装置10は、1/1000秒以下での高速制御が求められる。これを実現するためには、一般にメモリ部分を除く高周波制御装置10には、FPGA(Field-Programmable Gate Array)や
DSP(Digital signal processor)が用いられる。
【0031】
また、本発明を粒子線治療装置に適用する場合、粒子線治療装置における目的は患部への的確なビーム照射であるため、ビームモニタ8は、できるかぎり患者近くに置くことが好ましい。一方で高周波の周波数を制御する高周波制御装置10は、デジタル機器であるため放射線が発生している場には置かず、離れた場所に置かれることが多い。そのためビ
ームモニタ8と高周波制御装置10の間での信号伝送距離が数十m以上となる場合があり
、フィードバック制御の伝送損失やノイズによる信号劣化によりフィードバック制御の効果が低下する恐れがある。このような場合、ビームモニタ8から高周波制御装置10の間に電気光変換装置および光電気変換装置を設けて光信号でフィードバック信号を伝送することでこの劣化を防ぐことができる。さらに、図1では、ビームモニタ8からの信号を、ローパスフィルタ25を通して電流比較器15に入力している。このローパスフィルタ25は必ずしも必要ではないが、ノイズ等のフィードバック信号の高周波成分はフィードバック制御の不安定性の原因となるため、例えば数kHz以上の高周波信号を減衰させるローパスフィルタ25を用いることが好ましい。
【0032】
フィードバック制御が電流を目標値どおりに制御するのに効果的である理由を説明する。本出射方法では中心周波数を変位させることで運動量を変位させ、荷電粒子ビームを円形加速器本体100から出射させる。しかし、横方向(ビームの進行方向に対して垂直な方向)の位相平面における粒子分布や、縦方向(ビーム進行方向)のRFバケット内部の粒子の分布をあらかじめ知ることは困難であるため、スキャニング照射のために時間的に高い安定度をもった荷電粒子ビームを出射させることは非常に難しかった。また、偏向電磁石3の磁場は電源リップル等の現実には避けがたい要因により時間に対して揺らぐため、厳密には偏向電磁石3の磁場誤差ΔBを0にすることは難しく、これが原因で運動量が揺らいでしまう。さらに偏向電磁石3以外の磁石、例えば四極電磁石5においても、磁場誤差はチューンの変化に寄与する。これらの磁場誤差が含まれると、予め決めたΔfを用いてフィードバック制御することでビーム電流を制御することはいっそう難しくなるという課題があった。
【0033】
さらに本出射方法において、たとえばΔf(周波数は中心周波数f0+Δf)のフィードバック制御を試みた場合、一度、ある周波数で出射させた後に、もう一度同じ周波数に戻しても同程度の出射電流は得られない。その周波数で出射される荷電粒子はすでにほとんど出射済みだからである。厳密にはRFバケット内の荷電粒子はシンクロトロン振動しているため、同じ周波数でもある程度はビームが出射し続ける。また磁場誤差があった場合は、dp/pが同じでなければ、同じ周波数でも出射される可能性はある。以上から、一般に加速を安定にするために行われるΔfフィードバック制御を出射ビーム電流制御に適用しても、出射ビーム電流を時間に対して一定に制御することは困難であった。
【0034】
シンクロトロンからのビーム出射の物理を考えたとき、出射されるビーム電流量は、中心周波数f0に対してどれだけの周波数変化量Δfとなっているかによるのではないことがわかる。その時間における出射ビーム電流量を決定づけているのは、現在の周波数が過去の周波数に対してどれだけ変化しているか、つまり周波数の時間に対しての傾き(周波数変化率)である。本発明者らは、このことに注目し、周波数変化率の補正値を求め、フィードバック制御をかける場合、あらかじめ設計から知りえるf0ではなく、リアルタイムでしか判明しない周波数値から、この周波数変化率補正値を用いて次の周波数の値を演算することが効果的であることを見出した。
【0035】
以上の制御を式で表すと、式(3)のように表され、ある時間tにおける周波数をf(
t)と表したとき、f(t)の時間変化率df(t)/dtをフィードバック制御することで出射ビーム電流強度を効果的に制御できることが見出された。
【数3】
【0036】
式(3)の制御を行うため、周波数を記憶させる周波数メモリ21を備えたことが、本発明のフィードバック制御系の一つの特徴となる。このとき、目標電流値の荷電粒子を出射させるための周波数変化率のおおよその値は設計可能であるため、周波数変化率の設定値をあらかじめ決めておき周波数変化率設定値メモリ322に記憶させる。式(4)のように、この周波数変化率設定値からの補正値をフィードバック制御するとフィードバック利得が小さくすみ、制御はより安定する。
【数4】
なお、式(3)、式(4)における・は、時間微分を表す。この式(4)を実現したのが図1の構成である。
【0037】
また、式(3)を直接実現する構成にしても良い。すなわち、図3のような構成とする。図3において、図1と同一符号は、同一または相当する部分を示す。図3の構成においては、図1で示す周波数変化率設定値メモリ322を備えていない。目標電流値メモリ321に記憶されている目標電流値とビームモニタ8で測定されるビーム電流信号との差分である誤差信号を電流比較器15が出力する。周波数変化率演算器170において、電流比較器15の出力である誤差信号から直接演算により周波数変化率を求める。求めた周波数変化率を用いて、乗算器18、周波数制御器19において、次の、すなわち1クロック後の周波数を決定する。
【0038】
さらに、円形加速器から出射されるビーム電流値を、円形加速器内の残留ビーム電流の信号を用いて得ることもできる。残留ビーム電流モニタとしては、例えばDCCT(DC current transformer)を用いることができる。図4が、残留ビーム電流モニタ28としてDCCTを用いた構成例である。図4において、図1と同一符号は、同一または相当する部分を示す。DCCTは、円形加速器内の残留ビーム電流量を測定するモニタであるため、図1のビームモニタ8と異なり、残留ビーム電流値の時間変化が、出射されるビーム電流値となる。このため、微分演算器37を使用する。微分演算器37の出力信号がビーム電流値となるため、この信号をフィードバック信号として用いることができる。すなわち、残留ビーム電流モニタ28と微分演算器37とで、ビーム電流検出器80を構成する。
【0039】
以上のように、本発明の実施の形態1による円形加速器では、目標電流値メモリ321に出射装置70により出射させる荷電粒子のビーム電流の目標電流値を記憶させ、周波数決定部30において、ビーム電流検出器の信号と目標電流値メモリ321に記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定するようにしたので、制御が安定で、簡単な調整で安定した目標通りのビーム電流を出射できる円形加速器が得られる。
【0040】
実施の形態2.
図5は、本発明の実施の形態2による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図5において、図1と同一符号は、同一または相当する部分を示す。本実施の形態2では、高周波制御装置10の内部に、ビームモニタ8の信号を参照する内部タイミングシステム36を設けた。実施の形態1では、円形加速器の運転において加速、減速、出射の開始、終了のタイミングは外部のタイミングシステム27からのタイミング信号により行い、出射中は、フィードバック制御により決定される周波数を、高周波制御装置10が高周波発生装置9に出力するようにした。
【0041】
しかしながら、出射を完全にフィードバック制御のみで行うと、出射開始直後は出射される荷電粒子はほとんどないため、非常に大きなフィードバック利得がかかることにより出射されるビーム電流にオーバーシュートがでてしまう可能性がある。あらかじめフィードバック利得を小さく設定することも可能であるが、利得を小さくしすぎるとビーム電流の立ち上がり時間がかかる。これを解決する手段として、あるビーム電流が出射されはじめるまでは周波数設定値メモリ324のデータを使ったフィードフォワード制御で行い、その後はフィードバック制御に切り替えることで、立ち上がりが速く、かつ安定なビーム電流の制御が可能となる。
【0042】
ビーム電流をモニタして切り替えを行うためにビーム電流信号を一度、高周波制御装置10外部のタイミングシステム27に送ると、遅延が生ずる恐れがある。このため、高周波制御装置10内部でビーム電流をモニタして切り替えを行うようにしたほうが、より高速にフィードフォワード制御からフィードバック制御への切り替えが行えるため効果的である。本実施の形態2では、高周波制御装置10の内部に、内部タイミングシステム36を設け、この内部タイミングシステム36が、ビームモニタ8からのビーム電流信号に基づいて切替スイッチ26に指令を出して、フィードフォワード制御からフィードバック制御へのスイッチングを行うようにした。これにより、立ち上がりが速く、かつ安定なビーム電流の制御が行える。
【0043】
また、出射を開始してからフィードバック制御を開始するまでの最適な時間が予めわかっている場合、ビームモニタ8からのビーム電流信号に基づいてフィードフォワード制御からフィードバック制御への切り替えを行う代わりに、あらかじめ設定した、出射開始から所定の時間経過後にフィードフォワード制御からフィードバック制御に切り替えるようにすることで、高速に目標電流どおりの制御が可能となる。
【0044】
なお、ビーム電流信号は、図4で示した残留ビーム電流モニタ28と微分演算器37によるビーム電流検出器80の信号を用いても良いのは言うまでもない。以後の実施の形態においても、同様である。
【0045】
実施の形態3.
図6は、本発明の実施の形態3による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図6において、図1、図4および図5と同一符号は、同一または相当する部分を示す。本実施の形態3では、円形加速器内の残留ビーム電流値を測定する残留ビーム電流モニタ28を設けた。残留ビーム電流モニタ28の信号を微分演算器37により微分演算して求められるビーム電流値と、ビームモニタ8により測定されるビーム電流値が同じでなければ、出射されたビームがシンクロトロンからビームモニタ8までの間でロスしていることがわかる。このため、両者を比較する比較器29からの信号を、内部タイミングシステム36に送ることで出射停止用の信号として利用することが可能である。
【0046】
さらに、残留ビーム電流モニタ28からの信号は円形加速器内の残留ビーム電流値信号であるため、内部タイミングシステム36が残留ビーム電流モニタ28自身の信号により判断して、残留ビームが少なくなった場合に出射を終了させることも可能である。残留ビームが少なくなると、いくらフィードバック制御をかけても出射されるビーム電流を制御することは不可能となるため、この場合の制御不安定な出射を回避する効果がある。
【0047】
実施の形態4.
図7は、本発明の実施の形態4による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図7において、図1と同一符号は、同一または相当する部分を示す。実施の形態1で説明したように、本出射方法の場合、出射されるビームは、横
方向の位相平面における粒子分布や、縦方向のRFバケット内部の粒子の分布を反映することになるが、これらの粒子分布をあらかじめ知ることは難しい。よって、フィードフォワード制御により、出射されるビーム電流値を精確に目標電流値に制御することは難しい。本発明では、周波数変化率をフィードバック制御することとしたので、運動量変位率の変化する速さを制御することで出射ビーム電流を安定化することができ、磁場変動による外乱の効果をフィードバック制御により小さくできる。このうち前記の効果は再現性が高いため、フィードバック後に決定した周波数変化率を、例えば周波数変化率設定値メモリ322に格納しておき、次の加速時の出射のときには、予め設計により決めた周波数変化率設定値のデータを用いずに、前回のフィードバック制御で得られた周波数変化率データを用いる。その上で、磁場変動の外乱の効果はこのデータの補正値とすることでフィードバック利得を小さくすることが可能となる。本実施の形態4による制御方法では、フィードバック利得が小さいため制御の安定性がさらに高い効果がある。
【0048】
実施の形態5.
図8は、本発明の実施の形態5による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図8において、図1と同一符号は、同一または相当する部分を示す。本実施の形態5では、現在の周波数値と、次の周波数を決定するためのΔf値から電圧値を求める電圧演算器34と、高周波電圧メモリ323からの電圧値と電圧演算器34で求めた電圧値を切り替えるための切替スイッチ33を設けた。本出射方法では、運動量変位を変化させて(エネルギーを増加させて)出射を行うため、最適な電圧値が時々刻々と変化する。フィードフォワード制御で出射を行った場合は、あらかじめ周波数の値がわかるため、加速されるエネルギーの値が事前にわかり、その結果、最適な電圧値を事前に予測して、これを高周波電圧メモリ323に格納しておき、フィードフォワード制御で電圧を変化させる。
【0049】
一方、フィードバック制御を行った場合、出射してからの経過時間に対して、厳密な周波数の値を事前に知ることができない。高周波加速空洞2に印加される電圧値が最適な値ではない場合、図13のバケットから粒子が外に漏れる(バケットから漏れた粒子は周波数を変化さえても加速されない)ため、出射効率が下がる。このため、現在の周波数の値と次の周波数値を決めるためのΔfの値から演算して次の電圧値を決める。この演算により振幅制御器12に送られる電圧値は図13のバケット(セパラトリクスの内側)の面積を小さくしないような値となる。このように、フィードフォワード制御時は高周波電圧メモリ323に記憶された電圧値を高周波発生装置9に送り、フィードバック制御時は切替スイッチ33により切り替え、電圧演算器34で求めた電圧値を高周波発生装置9に送るようにした。この構成により、フィードバック制御中も現実の周波数に対応した、最適な電圧値の高周波が高周波加速空洞2に印加されるため、出射効率を高める効果がある。
【0050】
実施の形態6.
図9は、本発明の実施の形態6による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図9において、図1と同一符号は、同一または相当する部分を示す。本実施の形態6では、周波数比較器35を設けた。本出射方法ではビームを加速して運動量を変化させながら出射を行う。フィードバック制御を行わない場合は、事前に周波数の値が決まっているため、出射中に到達するエネルギーがあらかじめわかる。よって出射させたいエネルギーの範囲内の周波数変化にあらかじめ設計できる。しかしながらフィードバック制御をした場合、最終的に到達周波数の値が事前にわからない。つまり、出射されるエネルギー範囲が事前に予測できない。そこで予め決定した最終到達周波数の値を保持し、この値とフィードバック後の周波数の値とを比較する周波数比較器35を設けた。周波数比較器35により、フィードバック後の周波数が最終到達周波数まで変化したと判断された場合、フィードバック制御を停止するフィードバック制御停止信号をスイッチ26に送るとともに、円形加速器内に残留する粒子を捨てて、加速の初期化を行う。これにより、フィードバック制御を効果的に使えかつ、設計のエネルギー範囲の出射を行うことができる。
【0051】
実施の形態7.
図10は、本発明の実施の形態7による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図10において、図1と同一符号は、同一または相当する部分を示す。本実施の形態7では、周波数変化率補正演算器16の利得を時間によって変化させるため、予め利得の設定値の時間変化を記憶する利得設定値メモリ325を設けた。本出射方法ではRFバケット内部の粒子分布の影響を強く受け、また横方向の位相平面における粒子分布も影響する。よって、出射開始後の時間経過に適したフィードバック利得の値が異なる。特に出射後半はRFバケット内の荷電粒子の大半が出射されているため、ビーム電流量は低下しやすく、フィードバック利得は大きくしたほうが制御は効果的となる。本実施の形態7では、周波数変化率補正演算器16で使用される利得を、予め決定した、出射開始からの時間毎の利得を記憶する利得設定値メモリ325から読み出し、出射開始してからの時間帯によって利得を変えることによって、フィードバック制御をより効果的にすることが可能となる。
【0052】
実施の形態8.
図11は、本発明の実施の形態8による円形加速器の要部である高周波制御装置の構成を詳細に示すブロック図である。図11において、図1と同一符号は、同一または相当する部分を示す。本実施の形態8では、円形加速器本体100に、高速四極電磁石41を設けた。スキャニング照射では、照射する深さ方向の位置は、荷電粒子のエネルギーにより決定し、異なるエネルギーの荷電粒子を照射することで異なる深さ方向の位置に照射する。すなわち、エネルギーを変えることにより、深さ毎に決められた照射範囲(スライスと呼ぶ。ただし、厳密には体内不均一性、体型によって単一エネルギーで照射しても完全に同じ深さにはならない。)を照射する。出射されるエネルギーは、円形加速器の加速で決まるため、1回の入射による加速において同一エネルギー(同一スピル)で出射可能である。一方、照射対象において、重要臓器を避ける、飛び地になっている等、また体内の動きにあわせて出射する(例えば呼吸同期照射)等で一時的に出射を停止することが必要な場合がある。出射を停止するには、タイミング信号でフィードバック制御を停止し、周波数の変化する方向を急速に逆転させることで出射を停止させる方法がある。すなわち、周波数を下げて出射していた場合は上げる。周波数を上げて出射していた場合は下げる。タイミング信号により出射を再開した後は、再びフィードバック制御を開始する。しかしながら、このような方法では、停止のために周波数を変化させるため、出射開始後のフィードバック制御が不安定になる場合も考えられる。そこで、本実施の形態8では、周波数メモリ21の値を呼び出し続けることにより周波数を変化させずに、インダクタンスが小さく高速に応答する高速四極電磁石41を励磁して出射を一時停止させる。この場合、周波数メモリ21の値を呼び出し続けることにより周波数の値をホールドするだけで良いため、制御が容易となる。上記方法を用いて出射の一次停止、再出射が可能になれば1回の入射で加速されたシンクロトロン内のビームの利用効率が高まるため、照射時間を短縮できる。
【0053】
また、スキャニング照射では、一般に照射系の2個の2極電磁石によりビームを2次元に走査し、さらにエネルギーを調整することで深さ方向にも走査して目標部位を照射する。このとき、照射部位ごとに必要な照射量は異なる。本発明の電流調整方法は、ビームのエネルギーによらず適用可能であるため、異なるエネルギーのスピル(1回の入射、加速、出射で出射されるビーム電流の時間波形のことをスピルと呼ぶ。)ごとに、電流比較器15に送る目標電流値を変更することで、適した強度のビーム電流を出射することができる。また、深さごとに決められた照射範囲内でも、すなわち同一エネルギーのスピルにおいても、周縁部や照射部位全体の形状によって必要な照射量は位置によって異なる。このような場合、同一スピルにおいて、電流比較器15に送る目標電流値を時系列に変化させることで、同一エネルギーでビーム電流強度を変更することが可能となる。
【0054】
ビーム電流強度が変更できれば、予定照射量が大きい位置には大きい強度で、弱い位置には小さい強度で照射できるため、線量管理が容易となり、照射時間を短縮できる。さらに、実施の形態2で説明したように、フィードフォワード制御からフィードバック制御に切り替えるタイミングや、周波数変化率加算器17のフィードバックゲインを調整することで、スパイクのない、目標どおりのビーム電流変更が可能となる。
【符号の説明】
【0055】
1:初段加速器 2:高周波加速空洞
3:偏向電磁石 4:六極電磁石
7:出射用電極 8:ビームモニタ(ビーム電流検出器)
9:高周波発生装置 10:高周波制御装置
15:電流比較器 16:周波数変化率補正値演算器
17:周波数変化率補正器 18:乗算器
19:周波数制御器 21:周波数メモリ
26:切替スイッチ 28:残留ビーム電流モニタ
30:周波数決定部 35:周波数比較器
36:内部タイミングシステム 37:微分演算器
70:出射装置 80:ビーム電流検出器
100:円形加速器本体
321:目標電流値メモリ 322:周波数変化率設定値メモリ
323:高周波電圧メモリ 324:周波数設定値メモリ
325:利得設定値メモリ
【特許請求の範囲】
【請求項1】
荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、上記荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、この高周波発生装置が発生する高周波を制御する高周波制御装置と、上記周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、上記荷電粒子を上記周回軌道から取り出すための出射装置と、この出射装置によって出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器において、
上記高周波制御装置は、
上記出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、
上記ビーム電流検出器の検出信号と上記目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定する周波数決定部と、
を備え、
この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、上記決定された次の周波数の高周波を上記高周波発生装置が発生することを特徴とする円形加速器。
【請求項2】
上記目標電流値の上記荷電粒子を、上記出射装置によって出射させるために、上記高周波発生装置が発生する高周波の周波数を変化させる割合である周波数変化率を時系列データとして記憶する周波数変化率設定値メモリを備え、
上記周波数決定部は、上記ビーム電流検出器の検出信号と上記目標電流値メモリに記憶された目標電流値との誤差信号に対して演算を行い、周波数変化率補正値を決定する周波数変化率補正値演算器と、
上記周波数変化率設定値メモリに記憶された周波数変化率を、上記周波数変化率補正値演算器で決定した周波数変化率補正値により補正して周波数変化率を求める周波数変化率補正器と、を備えたことを特徴とする請求項1に記載の円形加速器。
【請求項3】
上記高周波制御装置は、予め決定した周波数を記憶する周波数設定値メモリと、
上記周波数決定部により決定された周波数と、上記周波数設定値メモリに記憶された周波数とを切り替える切替スイッチと
を備え、上記高周波発生装置は上記切替スイッチにより切り替えられた周波数の高周波を発生することを特徴とする請求項1に記載の円形加速器。
【請求項4】
上記切替スイッチは、上記荷電粒子ビームの出射開始から所定時間後に、上記周波数設定値メモリに記憶された周波数から、上記周波数決定部により決定された周波数に切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項5】
上記切替スイッチは、上記ビーム電流検出器の検出信号に基づいて、上記周波数設定値メモリに記憶された周波数と、上記周波数決定部により決定された周波数とを切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項6】
上記円形加速器内部の残留ビーム電流を検出する残留ビーム電流モニタを備え、上記切替スイッチは、上記残留ビーム電流モニタの検出信号に基づいて、上記周波数設定値メモリに記憶された周波数と、上記周波数決定部により決定された周波数とを切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項7】
補正された周波数変化率を、上記周波数変化率設定値メモリに記憶することを特徴とす
る請求項2に記載の円形加速器。
【請求項8】
上記高周波制御装置は、上記周波数決定部において求めた周波数変化率と現在の周波数に基づいて上記高周波発生装置により発生する高周波の電圧値を求めて、この求めた電圧値を上記高周波発生装置に送ることを特徴とする請求項1に記載の円形加速器。
【請求項9】
上記高周波制御装置は、予め決定した最終到達周波数の値を保持し、上記周波数制御器により決定された周波数が上記最終到達周波数に達したと判断した場合に上記切替スイッチに信号を送る周波数比較器を備えたことを特徴とする請求項3に記載の円形加速器。
【請求項10】
上記高周波制御装置は、予め決定した、出射開始からの時間毎の利得値を記憶する利得設定値メモリを備え、上記周波数変化率補正値演算器の利得を、上記利得設定値メモリから読み出した利得値により設定することを特徴とする請求項2に記載の円形加速器。
【請求項11】
荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、上記荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、上記周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、上記荷電粒子を上記周回軌道から取り出すための出射装置と、この出射装置から出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器の運転方法において、
上記ビーム電流検出器の検出信号と予め決定された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから上記高周波発生装置が発生する次の周波数を決定して運転することを特徴とする円形加速器の運転方法。
【請求項12】
上記ビーム電流検出器の検出信号と予め決定された目標電流値との誤差信号に基づくフィードバック制御により、上記目標電流値の上記荷電粒子を上記出射装置により出射させるために予め決定された周波数変化率を補正して、上記周波数変化率を求めることを特徴とする請求項11に記載の円形加速器の運転方法。
【請求項13】
上記求めた周波数変化率を、出射開始からの時系列データとして記憶し、別の加速後の出射時に、上記予め決定された周波数変化率を、上記求めた周波数変化率に置き換えて運転することを特徴とする請求項12に記載の円形加速器の運転方法。
【請求項14】
上記目標電流値を、時系列に変化させることを特徴とする請求項11に記載の円形加速器の運転方法。
【請求項1】
荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、上記荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、この高周波発生装置が発生する高周波を制御する高周波制御装置と、上記周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、上記荷電粒子を上記周回軌道から取り出すための出射装置と、この出射装置によって出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器において、
上記高周波制御装置は、
上記出射装置から出射する荷電粒子のビーム電流の目標電流値を記憶する目標電流値メモリと、
上記ビーム電流検出器の検出信号と上記目標電流値メモリに記憶された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから次の周波数を決定する周波数決定部と、
を備え、
この周波数決定部で決定された次の周波数を周波数メモリに記憶するとともに、上記決定された次の周波数の高周波を上記高周波発生装置が発生することを特徴とする円形加速器。
【請求項2】
上記目標電流値の上記荷電粒子を、上記出射装置によって出射させるために、上記高周波発生装置が発生する高周波の周波数を変化させる割合である周波数変化率を時系列データとして記憶する周波数変化率設定値メモリを備え、
上記周波数決定部は、上記ビーム電流検出器の検出信号と上記目標電流値メモリに記憶された目標電流値との誤差信号に対して演算を行い、周波数変化率補正値を決定する周波数変化率補正値演算器と、
上記周波数変化率設定値メモリに記憶された周波数変化率を、上記周波数変化率補正値演算器で決定した周波数変化率補正値により補正して周波数変化率を求める周波数変化率補正器と、を備えたことを特徴とする請求項1に記載の円形加速器。
【請求項3】
上記高周波制御装置は、予め決定した周波数を記憶する周波数設定値メモリと、
上記周波数決定部により決定された周波数と、上記周波数設定値メモリに記憶された周波数とを切り替える切替スイッチと
を備え、上記高周波発生装置は上記切替スイッチにより切り替えられた周波数の高周波を発生することを特徴とする請求項1に記載の円形加速器。
【請求項4】
上記切替スイッチは、上記荷電粒子ビームの出射開始から所定時間後に、上記周波数設定値メモリに記憶された周波数から、上記周波数決定部により決定された周波数に切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項5】
上記切替スイッチは、上記ビーム電流検出器の検出信号に基づいて、上記周波数設定値メモリに記憶された周波数と、上記周波数決定部により決定された周波数とを切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項6】
上記円形加速器内部の残留ビーム電流を検出する残留ビーム電流モニタを備え、上記切替スイッチは、上記残留ビーム電流モニタの検出信号に基づいて、上記周波数設定値メモリに記憶された周波数と、上記周波数決定部により決定された周波数とを切り替えることを特徴とする請求項3に記載の円形加速器。
【請求項7】
補正された周波数変化率を、上記周波数変化率設定値メモリに記憶することを特徴とす
る請求項2に記載の円形加速器。
【請求項8】
上記高周波制御装置は、上記周波数決定部において求めた周波数変化率と現在の周波数に基づいて上記高周波発生装置により発生する高周波の電圧値を求めて、この求めた電圧値を上記高周波発生装置に送ることを特徴とする請求項1に記載の円形加速器。
【請求項9】
上記高周波制御装置は、予め決定した最終到達周波数の値を保持し、上記周波数制御器により決定された周波数が上記最終到達周波数に達したと判断した場合に上記切替スイッチに信号を送る周波数比較器を備えたことを特徴とする請求項3に記載の円形加速器。
【請求項10】
上記高周波制御装置は、予め決定した、出射開始からの時間毎の利得値を記憶する利得設定値メモリを備え、上記周波数変化率補正値演算器の利得を、上記利得設定値メモリから読み出した利得値により設定することを特徴とする請求項2に記載の円形加速器。
【請求項11】
荷電粒子を周回軌道に沿って周回させて荷電粒子ビームを形成する偏向電磁石と、上記荷電粒子を加速するための高周波加速空洞と、この高周波加速空洞に高周波を出力する高周波発生装置と、上記周回軌道に沿って周回する荷電粒子のベータトロン振動を安定領域と共鳴領域に分割する領域分割装置と、上記荷電粒子を上記周回軌道から取り出すための出射装置と、この出射装置から出射された後の荷電粒子のビーム電流を検出するビーム電流検出器とを備えた円形加速器の運転方法において、
上記ビーム電流検出器の検出信号と予め決定された目標電流値との誤差信号に基づくフィードバック制御により、周波数変化率を求め、この求めた周波数変化率と現在の周波数とから上記高周波発生装置が発生する次の周波数を決定して運転することを特徴とする円形加速器の運転方法。
【請求項12】
上記ビーム電流検出器の検出信号と予め決定された目標電流値との誤差信号に基づくフィードバック制御により、上記目標電流値の上記荷電粒子を上記出射装置により出射させるために予め決定された周波数変化率を補正して、上記周波数変化率を求めることを特徴とする請求項11に記載の円形加速器の運転方法。
【請求項13】
上記求めた周波数変化率を、出射開始からの時系列データとして記憶し、別の加速後の出射時に、上記予め決定された周波数変化率を、上記求めた周波数変化率に置き換えて運転することを特徴とする請求項12に記載の円形加速器の運転方法。
【請求項14】
上記目標電流値を、時系列に変化させることを特徴とする請求項11に記載の円形加速器の運転方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−234653(P2012−234653A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−100987(P2011−100987)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]